Twin Paradox- the role of acceleration - cgc.physics.miami.edu · twin, according to each twin, and...
17
The twin paradox: the role of acceleration J. Gamboa#, F. Mendez#, M. B. Paranjape* and Benoit Sirois* *Groupe de physique des particules, Département de physique, Université de Montréal #Departamento de Fisica, Universidad de Santiago, Santiago, Chile
Transcript of Twin Paradox- the role of acceleration - cgc.physics.miami.edu · twin, according to each twin, and...

The twin paradox: the role of acceleration
J. Gamboa#, F. Mendez#, M. B. Paranjape* and Benoit Sirois* *Groupe de physique des particules,
Département de physique, Université de Montréal
#Departamento de Fisica, Universidad de Santiago, Santiago, Chile

What is the twin paradox• The twin paradox is as old as special relativity. • A pair of twins, A and B, synchronize their clocks, and then
B moves away (usually at a very fast velocity) to a distant object, and then returns to A, we find B is younger than A.
• B journey consists of a short period of acceleration followed by a long period of coasting at high relative velocity, then a period of deceleration until the velocity is reversed, another period of coasting and a finally deceleration to come to rest next to A.
• Apart from the accelerating periods the movement seems completely symmetric between A and B, this gives rise to the following paradoxical situation: due to the symmetry, B should think it is A that took the journey and that A should be younger
• Why is it in fact true that B is younger?

4
α
β
γ
δ
ϵ
ϕ
�′ �+�′ �+��′ �
� ′
� ′ +��
�� ′ +��
�� ′ +��
�� ′ +���
�� ′ +���
�
FIG. 1: Worldline of B, illustrated in reference frame R
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
For the all the accelerating periods, we can first observethat each accelerating period will last the exactly sameamount of time on A’s clock. This is due to symmetryunder time reversal and parity (invariance under spatialreflexion). According to A, B accelerating from 0 to V ,in period ↵, will take the same amount of coordinatetime as B accelerating from �V to 0 in period � due to

˼ƗŢʎ+ӉɏŢ+ǻǼǻȩӉ
Ǖ6++�Ӊ$:':+:!�:$Ӊ��Ӊ&���Ӊ�Ӊ°§Ŭć:&:Ӊ'':\:!��6&Ӊȃ��&�ª:Ӊ6$Ӊ6:��ª:�Ӊ�:Ӊ3���Ŭ��Ӊ_;Ŭ�G�Ӊ '6Ӊ�G:!:"��:Ӊ�:Ӊ ¬6$:!Ӊ6�Ӊ� ¬&�6Ӊ�G�Ӊ�Ӊ�&ӉG:Ӊ�G�Ӊ�:t6:$Ӊ�Ӊ!:&�9ȍӉ
Ø�:Ӊ ��:�Ӊ Q�G��Ӊ ϥ:c6t6TӉ �6Ӊ G&Ӊ µ������Ŭ ��Ŭh������EŬ �: &Ӊ Ӊ&t���Ӊ� :ôӉ
ÙD&Ӊ&Ӊ'++:$ӉӉ²��$�>�Ӊ�6+�Ӊ��Ӊ�:��+:Ӊ�G�Ӊ�:+:ª:Ӊ�G�Ӊ�G:Ӊ�!6'�+:Ӊ�"Ӊ!:+�ª��Ӊt:6&Ӊ�G�Ӊ�G�Ӊ���Ŭ �����Ŭ&Ӊ!:+@�ª:ĵӉ�G:�Ӊ&�Ӊ²ß:G�ӉG:G�ӉG:G�Ӊ"��tӉ�G:Ӊ��6�Ӊ�"ү:�Ӊ�"Ӊ׬+Ӊ�6Ũ�Ӊ�:Ӊ&cӉ�G�Ӊh����Ŭ�&Ӊt�ª6�Ӊ6$Ӊ&G�¬��Ӊ�G:�:"��:Ӊ�@�:�Ӊ��Ӊ�:Ӊt�!:Ӊ& �� �ÓӉf�Ӊ &ctt:�!cTӉ �G:Ӊ�6�cӉ��&&N :Ӊ�:&¬+�Ӊ&Ӊ�G�ӉN��GӉ&G�¬+$ӉN:Ӊ�G:Ӊ&t:Ӊ�:Ӊ�G:6Ӊ�G:�Ӊt::�ƂĉӉf¬�Ӊ6Ӊ�!$:!Ӊ"�!Ӊ�G:tӉ��Ӊ'�t:Ӊ�'=Ӊ���:�G:�Ӊ6$Ӊt1:Ӊ�G:Ӊ'�t�!&�6ÊӉ׬+Ӊt¬&�Ӊ:�G:!Ӊ&į��Ӊ�Ӊ�G:Ӊ:6$Ӊ�"Ӊ�G:Ӊ�!�Ӊ6$Ӊt1:ӉӉ '�t�!&�6Ӊ �"Ӊ'+�'1&�Ӊ�!�Ӊt�!:Ӊ &t�+cTӉ G:ӉG&Ӊ��Ӊ��t:ӉN�=TӉ6�Ӊ�G:Ӊ�6:Ӊ�G�Ӊ��t:&ӉN�=Ӊt¬&�ӉN:Ӊ�G:Ӊt6Ӊ�G�Ӊ�&Ӊ t�ª6�ÊӉ 6�ӉG:Ӊ =6��&Ӊ �G&TӉ N:�¬&:Ӊ G:Ӊ G�Ӊ ��Ӊ�¬�6Ӊ��¬6$9ӉmG:6ӉG:Ӊ�¬!6:$Ӊ��¬6�ÊӉСϫ Ӊ1ǖ6�&Ӊ�"Ӊ¬6¬&¬ Ӊ�G6�&Ӊ G��:6:$Ӊ 6ӉG&Ӊ&�':B&G�å�G:Ӊ ��'=:�&Ӊ�:6�Ӊ�чӇӉ�G6�&Ӊatt:$Ӊ¬�Ӊ�6&�Ӊ�6:Ӊ�++�Ӊ6$Ӊ&�Ӊ�6å�G+:Ӊ×:�:�Ӊ":+įӉ6��G6�9Ӊ
¥�Ӊ�G:Ӊ�cӉ��Ӊ&��:Ӊ�G:Ӊ!¬ :Ӊ&Ӊ��Ӊ&cӉ�G�Ӊ���Ŭ ��Ŭ+��Ŭ���Ŭ#���Ŭ���Ŭ�������������7Ŭ�G�ӉG&Ӊ&::6Ӊ�G6�&Ӊ"� Ӊ�6&�Ӊ�G:Ӊ�+Ѵ&�Ӊ6$Ӊ&�Ӊ�6�Ӊ&Ӊ�G:Ӊ�6:Ӊ�G�Ӊ��¬ $ӉN:Ӊ�G:Ӊ��¬6�:!ƲӉ�G�Ӊ&Ӊ�G:Ӊ$�:!:6':Ӊ�:��::6Ӊ�G:tӉ 6Ӊ6Ӊ²�&�+¬�:�Ӊ &:6&:�Ӊ6$Ӊ�Ӊ&Ӊ':��6+�Ӊ'���:'�9Ӊ
xª:�c%G6�Ӊǖ6Ӊ�G�&Ӊ²:>� 6��6�Ӊ&Ӊ���6�9Ӊÿ���:TӉ ø�&��Ӊ ŃG�Ӊ�:Ӊ�:�:ӉN :Ӊ ��Ӊ��:���Ӊ �G:Ӊ :ï:��Ӊ�ǖ�G�¬�Ӊ
� '¬ �6�Ӊ�G:Ӊ��: :���6Ӊ�"Ӊ6c�G6�ÉӉ� Ӊ�:Ӊ��t�¬�:�Ӊ�&Ӊ�G:Ӊ!��Ӊ�"Ӊ�G:Ӊ+:6��G&Ӊ�"Ӊ�G:Ӊ���Ӊ�!a:'��!�:&9ӉÙD:Ӊ'':+:!��6&Ӊ�+�Ӊ6�Ӊ��+:Ӊ6Ӊ:>�+66�Ӊ�G:Ӊ:6$Ӊ�:&¬+�9Ӊ °6$::$ĆӉ�Ӊ&ӉӉ&t�Į:Ӊt��:!Ӊ��Ӊ\�:!Ӊ�G:Ӊ&�¬��6Ӊ&�Ӊ�G�ӉfӉ&Ӊ'':�:��:$Ӊ:>'�+�Ӊ&Ӊt¬'G�Ӊ��Ӊ:ª:6Ӊt��:Ӊ�G6Ӊq3ӉN¬�Ӊ&�� Ӊ:6$&Ӊ¬�Ӊ�+$:�Ӊ�G6Ӊs_Ӊ °6Ӊø�¬!:Ӊ I I �ė�:ӉGª:Ӊ$$:$Ӊ:>�� cӉt��G6�Ӊ��: :���6&Ӊ��ӉfŨ&Ӊ�!ť:���!c9Ӊÿ��ӉfӉÚ!:&Ӊ
!B{�#ȏǧ/ȷ°LJ� ����%�ïLJĜ-áLJƫ Õ�������ȷØ��ǽ����ȷ��#ȷm�¨#�ȷ� � ����%>�Č�ȷ 1 À LJ�îLJ Č -Ïkâ LJ #�^

Resolution of the twin paradox• One should be able to calculate the elapsed proper time of each
twin, according to each twin, and show that the answer is the same for each calculation.
• The calculation according to twin A is trivial and gives the answer that B is younger.
• If the coasting periods are much longer than the accelerating periods, the result can be obtained by considering only the coasting periods and verifying that the accelerating periods give only a small correction that can be made as small as desired.
• The calculation according to B is much more complicated, under no circumstances can the accelerating periods be neglected.
• Therefore the role of the acceleration is crucial to the resolution of the twin paradox.

Analysis using just the coasting periods• A will say that B coasted for a time in each coasting period. • So A will have aged by the amount , and A will then say that B
was moving at velocity . Then the usual Lorentz time dilation means that B will have only aged by . Where is the usual factor .
• On the other hand, B will say that in fact it was A that was coasting, but at velocity , but for how long?
• The naive answer, , dictated by symmetry is actually wrong • The point is that we have already broken the symmetry by choosing
the turnaround point to be fixed in the the reference frame of A. Thus according to B, the turnaround point is moving towards B at the speed , and the ensuing Lorentz contraction makes the distance shorter by a factor of .
• Thus the time that B thinks A was coasting is ( / )/ = • As B thinks A is moving at , the usual time dilation then gives
the aging by of B according to A .
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
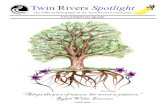
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
4
FIG. 1: Worldline of B, illustrated in reference frame R
on Figure (1). Then the elapsed proper time of A, dur-ing the coasting periods of B according to A, integratingEqn.(5) is
⌧A,�(A) = ⌧A,✏(A) ⌘ T0 =L
V. (8)
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
4
FIG. 1: Worldline of B, illustrated in reference frame R
on Figure (1). Then the elapsed proper time of A, dur-ing the coasting periods of B according to A, integratingEqn.(5) is
⌧A,�(A) = ⌧A,✏(A) ⌘ T0 =L
V. (8)
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
4
FIG. 1: Worldline of B, illustrated in reference frame R
on Figure (1). Then the elapsed proper time of A, dur-ing the coasting periods of B according to A, integratingEqn.(5) is
⌧A,�(A) = ⌧A,✏(A) ⌘ T0 =L
V. (8)
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
4
FIG. 1: Worldline of B, illustrated in reference frame R
on Figure (1). Then the elapsed proper time of A, dur-ing the coasting periods of B according to A, integratingEqn.(5) is
⌧A,�(A) = ⌧A,✏(A) ⌘ T0 =L
V. (8)
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
4
FIG. 1: Worldline of B, illustrated in reference frame R
on Figure (1). Then the elapsed proper time of A, dur-ing the coasting periods of B according to A, integratingEqn.(5) is
⌧A,�(A) = ⌧A,✏(A) ⌘ T0 =L
V. (8)
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
4
FIG. 1: Worldline of B, illustrated in reference frame R
on Figure (1). Then the elapsed proper time of A, dur-ing the coasting periods of B according to A, integratingEqn.(5) is
⌧A,�(A) = ⌧A,✏(A) ⌘ T0 =L
V. (8)
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)

Calculation of the elapsed proper time• A will say that he or she aged for 2 plus some small or
negligible correction from during the accelerating periods. • A will say that B aged 2 during this time, and thus B is
younger than A. This is of course correct and resolves the twin paradox, if we are certain that it does not matter in which frame we compute the elapsed proper time.
• However if we are to be thorough we must also show how to do the calculation according to B, and show that we get the same result.
• The calculation according to B gives 2 from the two coasting periods for the aging of A. Therefore it is crucial to figure out what happens during the accelerating periods.
3
will use units in which the speed of light is unity, c = 1.We will denote the elapsed proper time of each twin by�⌧A(A) and �⌧B(A) for A and B respectively as calcu-lated by A, and correspondingly, we will denote elapsedproper time of each twin by �⌧A(B) and �⌧B(B) for Aand B respectively but this time as calculated by B. Wewill show explicitly that these are in fact independent ofwhich twin does the calculation, that is we will show:
�⌧A(A) = �⌧A(B) (1)�⌧B(A) = �⌧B(B) (2)
The proper time calculated in an inertial reference frameis Lorentz invariant. This is because the metric ofMinkowski spacetime, which defines the proper time, isLorentz invariant
d⌧2 = dT 2 � dX2. (3)
Twin A is of course always in an inertial reference framehence invariance under Lorentz transformations is ex-pected. However, Twin B is not. Therefore, the calcula-tion of the proper times according to twin B will comeout to be equal to those calculated by twin A because infact the proper time is not only Lorentz invariant, butis diffeomorphism invariant, a fancy name for invariantunder an arbitrary change of coordinates, i.e. it is in-variant for absolutely any observer. The analysis of thisarbitrary diffeomorphism invariance is out of the scopeof the present article and will not be presented here.
It will become clear that it is much easier to do thecalculation in the reference frame of A, however, it is alsonecessary to explicitly do the calculation in the referenceframe of B to show that indeed B will also find exactly thesame values for the elapsed proper times and hence, onceand for all, dispel with the paradox. Most importantly,for the calculation according to B, it will be seen that itis crucial not to neglect the periods of acceleration. Wewill refer to coordinates according to A by the notationxµ = (T,X) while the coordinates according to B will bedenoted as xµ = (T , X).
A. Elapsed proper time of A according to A
The Lorentz frame in which A is always at rest, herebyreferred to as R, is equipped with coordinates xµ =(T,X). In this frame, the lapse of proper time of A be-tween events at fixed X is simply equal to the lapse ofcoordinate time T . Setting c = 1, with a metric signature(+,�), we have the infinitesimal elapsed proper time, asin Eqn.(3), for infinitesimal elapsed coordinate time dTand infinitesimal change of spatial coordinate dX
d⌧2(A) = dT2 � dX2 (4)
where the notation d⌧(A) indicates the proper time ac-cording to A. dX = 0 when A is at rest, therefore,
(T,X) = (TA, 0) for the trajectory of A in A’s coordi-nates, and hence
d⌧A(A) = dTA (5)
where now the notation d⌧A(A) indicates the proper timeof A according to A, and also treating ⌧A(A) as a func-tion of the coordinate time of A, TA. Thus we see thatthe elapsed proper time for A is equal to the elapsedcoordinate time for A. Then we have
�⌧A(A) =
Z �⌧A(A)
0d⌧A(A) =
Z TF
0dTA = TF (6)
where TF is defined as the elapsed coordinate time for Awhen B has returned (and from the calculation, we seethat it is, equally well, numerically equal to the elapsedproper time for A).
We will find it useful to express TF in terms of someintermediate times that are relevant to the motion of B,as seen by A. Figure (1) illustrates the path of B throughspacetime as seen in reference frame R, the dashed seg-ments representing the accelerating periods and the solidsegments the coasting periods. The greek letters labeldifferent episodes in the motion of B. The first acceler-ating period of B is referred to as ↵, the first coastingperiod as �, the second and third accelerating periods as� and �, the second coasting period as ✏ and the finalaccelerating period as �. It should be evident that A’sworldline simply lies along the T axis.(TB, XB) are the coordinates of B according to A on
its worldline in Figure(1). (T 0, X 0) are the coordinates ofB, according to A, when the first period of acceleration↵ ends. A little reflection will convince the reader thateach accelerating period of B lasts for the same amountof time T 0 in the reference frame R.L is the spatial length and T0 is the elapsed coordinate
time in the reference frame R, of the coasting periods ofB, which are labelled � and ✏. In reference frame R, Bhas velocity V and �V during the coasting periods andclearly V = L/T0. The world line of B, for the coastingperiod � for example, with coordinates (TB, XB) is simplyfound by writing down the equation of a straight line withthe correct slope and then ensuring that it passes throughthe point (T 0, X 0) as
TB =(T0 + T 0)� T 0
(L+X 0)�X 0XB + T 0 � (T0 + T 0)� T 0
(L+X 0)�X 0X0
=T0
LXB + T 0 � T0
LX 0
=XB
V+ T 0 � X 0
V. (7)
We reiterate, TB and XB are the instantaneous time andspatial coordinates of B, T 0 and X 0 the coordinates whenthe first acceleration period ends and T0 and L are theelapsed coordinate time and distance respectively duringwhich B is coasting, and all coordinates given in the ref-erence frame R (i.e. all according to A) and are denoted
4
FIG. 1: Worldline of B, illustrated in reference frame R
on Figure (1). Then the elapsed proper time of A, dur-ing the coasting periods of B according to A, integratingEqn.(5) is
⌧A,�(A) = ⌧A,✏(A) ⌘ T0 =L
V. (8)
During all of the accelerating periods the amount oftime that will pass on A’s clock is always the same anddenoted by T 0. Then the elapsed proper time is also givenby T 0,
⌧A,↵(A) = ⌧A,�(A) = ⌧A,�(A) = ⌧A,�(A) = T 0. (9)
Therefore, the total elapsed proper time �⌧A(A) = TF
for A, making references to certain time stamps that Amakes for the trip of B, for the entire round trip of B isequal to
�⌧A(A) = TF = 2T0 + 4T 0 . (10)
B. Elapsed proper time of B according to A
The elapsed proper time for B according to A requirestwo calculations, one for the coasting periods and onefor the accelerating periods. Clearly, by symmetry, theelapsed proper time of B according to A is the same inthe two coasting periods and separately the same in thefour accelerating periods. The motion of B for the period� where V is constant, satisfies, inverting Eqn.(7)
XB = V TB � V T 0 +X 0. (11)
Then the differential elapsed proper time of B accordingto A satisfies
d⌧2B(A) = dT 2B � dX2
B
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V 2
�dT 2
B (12)
and hence
⌧B,�(A) =
Z T0+T 0
T 0
�1� V 2
� 12 dTB
=�1� V 2
� 12 T0
=T0
�V= ⌧B,✏(A) (13)
where �V = 1/p1� V 2 is the standard Lorentz factor,
and once and for all ⌧B(A) is the elapsed proper time of Baccording to A (we expect that the notation is now clearand we will not have to explain it each time). �V could bea large number, making in principle, that the proper timethat elapses, during the coasting periods for B accordingto A, is very much smaller than the elapsed proper timefor A during these periods. The standard presentationof the twin paradox is based on this understanding, thatA ages T0 during the coasting phase of B, while B agesT0/�V < T0, hence B is younger than A. Because B is inmotion according to A, its elapsed proper time is smallerthan the elapsed proper time of A, for the same elapsedcoordinate time.
As this is during the coasting period when both twinsare in inertial reference frames, exactly the same analysiswould apply for B concerning A, and then we are in aparadoxical situation where each twin thinks the othermust be younger. The resolution of the paradox comesthrough the understanding that the two periods are notsymmetrical and additionally through examining whathappens during the accelerating periods.
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) =
T0�V
. The deceleratingphase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)

Elapsed proper time of B according to A: uniform acceleration
• An non-inertial observer is said to feel an acceleration g if an inertial observer, instantaneously co-moving with the non-inertial observer, sees that the acceleration is g.
• Then we would say the velocity as measured by the instantaneous inertial observer satisfies:
• But acceleration transforms as:
• Thus the differential equation we must solve is:
• ie.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.

• This easily integrates as:
• Then:
• So we find:
• This integrates as: or • Thus the total elapsed proper time of B according to A is:
• On the other hand the proper time of A according to A is simply:
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
6
Replacing for V from Eqn.(26) gives the formula for thetransformation of the acceleration
A(T ) =A(T )
�3v (1� vV (T ))3
. (28)
2. The uniformly accelerated observer
The notion of uniform acceleration makes sense in thefollowing way. At each instant during the acceleration,the inertial observer travelling at the instantaneous veloc-ity of the accelerated object will see the accelerated ob-ject as moving non-relativistically and will actually be ac-celerating from rest (of course the inertial observer couldhave a small relative velocity will also be fine for thisanalysis, but the analysis is clearest with zero relative ve-locity). Hence we can be confident that the accelerationthis observer measures is given by the non-relativisticformula. Then we can impose that such observers (adifferent one at each instant) always measure the sameacceleration, as the definition of a uniformly acceleratingobject.
Therefore we impose, for each observer (different ob-servers at different times) travelling with velocity v =V (T ), the acceleration that each one measures is a con-stant that we call g, using Eqn.(28):
A(T )|v=V (T ) ⌘ g =A(T )
�3V (T ) (1� (V (T ))2)3
= �3V (T )A(T )
= �3V (T )
dV (T )
dT. (29)
This yields the differential equation for V (T )
dV (T )
dT= g(1� V 2(T ))
32 (30)
which, with the initial condition that V = 0 at T = 0,integrates as
V (T ) =gT
(1 + (gT )2)12
. (31)
This formula is easily inverted as
T (V ) =1
g
V (T )p1� (V (T ))2
. (32)
Therefore we can identify T 0, the coordinate time of twinA at the end of the acceleration as seen in Fig.(1), as afunction of the coasting velocity V as
T 0 =1
g
Vp1� V 2
(33)
and equally well
V = V (T 0) =gT 0
(1 + (gT 0)2)12
. (34)
We can integrate the formula of Eqn.(31) once to find theposition of the uniformly accelerated object as a functionof coordinate time as
X(T ) =1
g
⇣1 + (gT )2
⌘ 12 � 1
!+X(0). (35)
3. Proper time of B as calculated by A
We can now use this formula of Eqn.(31) for the ve-locity of a uniformly accelerated object as a function ofthe coordinate time T , to find the proper time of B asa function of its coordinate time TB according to A. Ifwe write the (differential) of the proper time of B, usingEqn. (4), in terms of the coordinates of B according toA, we find
d⌧2B(A) = dT 2B � dX2
B (36)
=
1�
✓dXB
dTB
◆2!dT 2
B
=�1� V (TB)
2�dT 2
B (37)
The velocity of B as a function of its coordinate time TB
(as measured by A), will be given by Eqn.(31), as
V (TB) =gTB
(1 + (gTB)2)12
(38)
thus
d⌧B(A)=
✓1� (gTB)2
1 + (gTB)2
◆ 12
dTB
=1
(1 + (gTB)2)12
dTB. (39)
This integrates easily as
⌧B(A) =1
garcsinh(gTB) (40)
satisfying the boundary condition that ⌧B(A)|TB=0 = 0.Therefore for the accelerating period ↵, which goes fromTB : 0 ! T 0 (and by symmetry for each acceleratingperiod) we have the elapsed proper time according to Ais
⌧B,↵(A) =1
garcsinh(gT 0). (41)
From Eqns. (10) and (13), (41) we conclude that thetotal elapsed proper time of the trip for B according toA is
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (42)
We will show below that this is less than �⌧A(A) = TF ,the elapsed proper time of A according to A, and hencethe travelling twin, B, is younger.
7
We will find it useful in the sequel, to treat the propertime of B, ⌧B as the independent variable, invertingEqn.(40) as
TB(⌧B) =1
gsinh(g⌧B). (43)
With Eqn. (36) and (40), one can easily determine XB
as a function of ⌧B. Indeed,✓dXB(⌧B)
d⌧B
◆2
=
✓dTB(⌧B)
d⌧B
◆2
� 1
= cosh2(g⌧B)� 1
= sinh2(g⌧B). (44)
This integrates trivially as
XB(⌧B) =1
gcosh(g⌧B)�
1
g(45)
imposing the boundary condition that XB(⌧B = 0) = 0.Thus we find a unified expression, which will be usedlater,
XB(⌧B) =1
gcosh(g⌧B)�
1
g(46)
TB(⌧B) =1
gsinh(g⌧B) . (47)
4. Resolution of the twin paradox according to A
The elapsed proper time for A according to A wasfound to be, Eqn.(10)
�⌧A(A) = TF = 2T0 + 4T 0 (48)
and the corresponding elapsed proper time of B accordingto A, from Eqn.(42)
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (49)
The first terms in both Eqn.(48) and Eqn.(49) are justthe special relativistic elapsed proper times for the twocoasting periods, for each twin. Since �V � 1 clearly thelapse of proper time for A is longer than for B in thosetwo periods,
2T0 � 2T0
�V. (50)
This inequality corresponds to the usual resolution ofthe twin paradox, when the accelerating periods are ne-glected, according to the twin A, who does not move. Itis also the source of the twin paradox, if we neglect theaccelerated parts of the trajectory and invoke completesymmetry between the coasting portions of the trajec-tory. Then, twin B could make the same conclusion aboutthe “motion” of twin A, and come up with the paradox
that it must be in fact twin A who is younger. As wewill explicitly see, it is wrong to neglect the acceleratedpart of the trajectory of twin B and it is wrong to imag-ine that the motion is completely symmetric even for theunaccelerated, coasting parts of the trajectories.
Looking in detail at the lapse of proper time duringthe accelerating periods, we can use the explicit analyticformula for the arcsinhx = ln(x+
px2 + 1) to write
4
garcsinh(gT 0) 4T 0
) gT 0 +p(gT 0)2 + 1 egT
0(51)
comparing the lapse of proper time during the accelerat-ing periods. The inequality (51) is not obviously valid,however it is easy to prove, see [16]. Therefore, for theaccelerating part of the trajectory, we also have
4
garcsinh(gT 0) 4T 0 (52)
and hence the elapsed proper time during the acceleratedpart of the trajectory is also greater for twin A than fortwin B.
Thus the calculation from A’s side clearly gives theexpected result, that A, who does not travel, will be olderthan B, when B, who does travel, returns.
C. Interlude
In this section, we will analyze the reference frame,more generally the coordinate system, that is appropri-ate for twin B. We will impose that in this coordinatesystem, twin B’s position is always at rest at its origin;twin B does not move in his or her coordinate system.Then, it cannot be a simple inertial reference frame, astwin B suffers acceleration. During the coasting periodsthe coordinate system of twin B will simply be an in-ertial reference frame, however, during the acceleratingperiods, it must be something different.
1. Accelerating phase
The coordinate system during the accelerating phasecannot be an inertial reference frame, as any inertial ob-server will see twin B as accelerating. Taking a hint fromthe expressions for the coordinates of B according to A asa function of the proper time of B, Eqns.(46,47), we con-sider the transformation of coordinates between (T,X)for twin A and (T , X) for twin B
X =
✓1
g+ X
◆cosh(gT )� 1
g(53)
T =
✓1
g+ X
◆sinh(gT ) . (54)
7
We will find it useful in the sequel, to treat the propertime of B, ⌧B as the independent variable, invertingEqn.(40) as
TB(⌧B) =1
gsinh(g⌧B). (43)
With Eqn. (36) and (40), one can easily determine XB
as a function of ⌧B. Indeed,✓dXB(⌧B)
d⌧B
◆2
=
✓dTB(⌧B)
d⌧B
◆2
� 1
= cosh2(g⌧B)� 1
= sinh2(g⌧B). (44)
This integrates trivially as
XB(⌧B) =1
gcosh(g⌧B)�
1
g(45)
imposing the boundary condition that XB(⌧B = 0) = 0.Thus we find a unified expression, which will be usedlater,
XB(⌧B) =1
gcosh(g⌧B)�
1
g(46)
TB(⌧B) =1
gsinh(g⌧B) . (47)
4. Resolution of the twin paradox according to A
The elapsed proper time for A according to A wasfound to be, Eqn.(10)
�⌧A(A) = TF = 2T0 + 4T 0 (48)
and the corresponding elapsed proper time of B accordingto A, from Eqn.(42)
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (49)
The first terms in both Eqn.(48) and Eqn.(49) are justthe special relativistic elapsed proper times for the twocoasting periods, for each twin. Since �V � 1 clearly thelapse of proper time for A is longer than for B in thosetwo periods,
2T0 � 2T0
�V. (50)
This inequality corresponds to the usual resolution ofthe twin paradox, when the accelerating periods are ne-glected, according to the twin A, who does not move. Itis also the source of the twin paradox, if we neglect theaccelerated parts of the trajectory and invoke completesymmetry between the coasting portions of the trajec-tory. Then, twin B could make the same conclusion aboutthe “motion” of twin A, and come up with the paradox
that it must be in fact twin A who is younger. As wewill explicitly see, it is wrong to neglect the acceleratedpart of the trajectory of twin B and it is wrong to imag-ine that the motion is completely symmetric even for theunaccelerated, coasting parts of the trajectories.
Looking in detail at the lapse of proper time duringthe accelerating periods, we can use the explicit analyticformula for the arcsinhx = ln(x+
px2 + 1) to write
4
garcsinh(gT 0) 4T 0
) gT 0 +p(gT 0)2 + 1 egT
0(51)
comparing the lapse of proper time during the accelerat-ing periods. The inequality (51) is not obviously valid,however it is easy to prove, see [16]. Therefore, for theaccelerating part of the trajectory, we also have
4
garcsinh(gT 0) 4T 0 (52)
and hence the elapsed proper time during the acceleratedpart of the trajectory is also greater for twin A than fortwin B.
Thus the calculation from A’s side clearly gives theexpected result, that A, who does not travel, will be olderthan B, when B, who does travel, returns.
C. Interlude
In this section, we will analyze the reference frame,more generally the coordinate system, that is appropri-ate for twin B. We will impose that in this coordinatesystem, twin B’s position is always at rest at its origin;twin B does not move in his or her coordinate system.Then, it cannot be a simple inertial reference frame, astwin B suffers acceleration. During the coasting periodsthe coordinate system of twin B will simply be an in-ertial reference frame, however, during the acceleratingperiods, it must be something different.
1. Accelerating phase
The coordinate system during the accelerating phasecannot be an inertial reference frame, as any inertial ob-server will see twin B as accelerating. Taking a hint fromthe expressions for the coordinates of B according to A asa function of the proper time of B, Eqns.(46,47), we con-sider the transformation of coordinates between (T,X)for twin A and (T , X) for twin B
X =
✓1
g+ X
◆cosh(gT )� 1
g(53)
T =
✓1
g+ X
◆sinh(gT ) . (54)
7
We will find it useful in the sequel, to treat the propertime of B, ⌧B as the independent variable, invertingEqn.(40) as
TB(⌧B) =1
gsinh(g⌧B). (43)
With Eqn. (36) and (40), one can easily determine XB
as a function of ⌧B. Indeed,✓dXB(⌧B)
d⌧B
◆2
=
✓dTB(⌧B)
d⌧B
◆2
� 1
= cosh2(g⌧B)� 1
= sinh2(g⌧B). (44)
This integrates trivially as
XB(⌧B) =1
gcosh(g⌧B)�
1
g(45)
imposing the boundary condition that XB(⌧B = 0) = 0.Thus we find a unified expression, which will be usedlater,
XB(⌧B) =1
gcosh(g⌧B)�
1
g(46)
TB(⌧B) =1
gsinh(g⌧B) . (47)
4. Resolution of the twin paradox according to A
The elapsed proper time for A according to A wasfound to be, Eqn.(10)
�⌧A(A) = TF = 2T0 + 4T 0 (48)
and the corresponding elapsed proper time of B accordingto A, from Eqn.(42)
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (49)
The first terms in both Eqn.(48) and Eqn.(49) are justthe special relativistic elapsed proper times for the twocoasting periods, for each twin. Since �V � 1 clearly thelapse of proper time for A is longer than for B in thosetwo periods,
2T0 � 2T0
�V. (50)
This inequality corresponds to the usual resolution ofthe twin paradox, when the accelerating periods are ne-glected, according to the twin A, who does not move. Itis also the source of the twin paradox, if we neglect theaccelerated parts of the trajectory and invoke completesymmetry between the coasting portions of the trajec-tory. Then, twin B could make the same conclusion aboutthe “motion” of twin A, and come up with the paradox
that it must be in fact twin A who is younger. As wewill explicitly see, it is wrong to neglect the acceleratedpart of the trajectory of twin B and it is wrong to imag-ine that the motion is completely symmetric even for theunaccelerated, coasting parts of the trajectories.
Looking in detail at the lapse of proper time duringthe accelerating periods, we can use the explicit analyticformula for the arcsinhx = ln(x+
px2 + 1) to write
4
garcsinh(gT 0) 4T 0
) gT 0 +p(gT 0)2 + 1 egT
0(51)
comparing the lapse of proper time during the accelerat-ing periods. The inequality (51) is not obviously valid,however it is easy to prove, see [16]. Therefore, for theaccelerating part of the trajectory, we also have
4
garcsinh(gT 0) 4T 0 (52)
and hence the elapsed proper time during the acceleratedpart of the trajectory is also greater for twin A than fortwin B.
Thus the calculation from A’s side clearly gives theexpected result, that A, who does not travel, will be olderthan B, when B, who does travel, returns.
C. Interlude
In this section, we will analyze the reference frame,more generally the coordinate system, that is appropri-ate for twin B. We will impose that in this coordinatesystem, twin B’s position is always at rest at its origin;twin B does not move in his or her coordinate system.Then, it cannot be a simple inertial reference frame, astwin B suffers acceleration. During the coasting periodsthe coordinate system of twin B will simply be an in-ertial reference frame, however, during the acceleratingperiods, it must be something different.
1. Accelerating phase
The coordinate system during the accelerating phasecannot be an inertial reference frame, as any inertial ob-server will see twin B as accelerating. Taking a hint fromthe expressions for the coordinates of B according to A asa function of the proper time of B, Eqns.(46,47), we con-sider the transformation of coordinates between (T,X)for twin A and (T , X) for twin B
X =
✓1
g+ X
◆cosh(gT )� 1
g(53)
T =
✓1
g+ X
◆sinh(gT ) . (54)

Elapsed proper time according to B• The coordinate system of B during the accelerating periods is
not inertial. The motion of B according to A is given by solving the equations:
• The solution is given by:
7
We will find it useful in the sequel, to treat the propertime of B, ⌧B as the independent variable, invertingEqn.(40) as
TB(⌧B) =1
gsinh(g⌧B). (43)
With Eqn. (36) and (40), one can easily determine XB
as a function of ⌧B. Indeed,✓dXB(⌧B)
d⌧B
◆2
=
✓dTB(⌧B)
d⌧B
◆2
� 1
= cosh2(g⌧B)� 1
= sinh2(g⌧B). (44)
This integrates trivially as
XB(⌧B) =1
gcosh(g⌧B)�
1
g(45)
imposing the boundary condition that XB(⌧B = 0) = 0.Thus we find a unified expression, which will be usedlater,
XB(⌧B) =1
gcosh(g⌧B)�
1
g(46)
TB(⌧B) =1
gsinh(g⌧B) . (47)
4. Resolution of the twin paradox according to A
The elapsed proper time for A according to A wasfound to be, Eqn.(10)
�⌧A(A) = TF = 2T0 + 4T 0 (48)
and the corresponding elapsed proper time of B accordingto A, from Eqn.(42)
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (49)
The first terms in both Eqn.(48) and Eqn.(49) are justthe special relativistic elapsed proper times for the twocoasting periods, for each twin. Since �V � 1 clearly thelapse of proper time for A is longer than for B in thosetwo periods,
2T0 � 2T0
�V. (50)
This inequality corresponds to the usual resolution ofthe twin paradox, when the accelerating periods are ne-glected, according to the twin A, who does not move. Itis also the source of the twin paradox, if we neglect theaccelerated parts of the trajectory and invoke completesymmetry between the coasting portions of the trajec-tory. Then, twin B could make the same conclusion aboutthe “motion” of twin A, and come up with the paradox
that it must be in fact twin A who is younger. As wewill explicitly see, it is wrong to neglect the acceleratedpart of the trajectory of twin B and it is wrong to imag-ine that the motion is completely symmetric even for theunaccelerated, coasting parts of the trajectories.
Looking in detail at the lapse of proper time duringthe accelerating periods, we can use the explicit analyticformula for the arcsinhx = ln(x+
px2 + 1) to write
4
garcsinh(gT 0) 4T 0
) gT 0 +p(gT 0)2 + 1 egT
0(51)
comparing the lapse of proper time during the accelerat-ing periods. The inequality (51) is not obviously valid,however it is easy to prove, see [16]. Therefore, for theaccelerating part of the trajectory, we also have
4
garcsinh(gT 0) 4T 0 (52)
and hence the elapsed proper time during the acceleratedpart of the trajectory is also greater for twin A than fortwin B.
Thus the calculation from A’s side clearly gives theexpected result, that A, who does not travel, will be olderthan B, when B, who does travel, returns.
C. Interlude
In this section, we will analyze the reference frame,more generally the coordinate system, that is appropri-ate for twin B. We will impose that in this coordinatesystem, twin B’s position is always at rest at its origin;twin B does not move in his or her coordinate system.Then, it cannot be a simple inertial reference frame, astwin B suffers acceleration. During the coasting periodsthe coordinate system of twin B will simply be an in-ertial reference frame, however, during the acceleratingperiods, it must be something different.
1. Accelerating phase
The coordinate system during the accelerating phasecannot be an inertial reference frame, as any inertial ob-server will see twin B as accelerating. Taking a hint fromthe expressions for the coordinates of B according to A asa function of the proper time of B, Eqns.(46,47), we con-sider the transformation of coordinates between (T,X)for twin A and (T , X) for twin B
X =
✓1
g+ X
◆cosh(gT )� 1
g(53)
T =
✓1
g+ X
◆sinh(gT ) . (54)
7
We will find it useful in the sequel, to treat the propertime of B, ⌧B as the independent variable, invertingEqn.(40) as
TB(⌧B) =1
gsinh(g⌧B). (43)
With Eqn. (36) and (40), one can easily determine XB
as a function of ⌧B. Indeed,✓dXB(⌧B)
d⌧B
◆2
=
✓dTB(⌧B)
d⌧B
◆2
� 1
= cosh2(g⌧B)� 1
= sinh2(g⌧B). (44)
This integrates trivially as
XB(⌧B) =1
gcosh(g⌧B)�
1
g(45)
imposing the boundary condition that XB(⌧B = 0) = 0.Thus we find a unified expression, which will be usedlater,
XB(⌧B) =1
gcosh(g⌧B)�
1
g(46)
TB(⌧B) =1
gsinh(g⌧B) . (47)
4. Resolution of the twin paradox according to A
The elapsed proper time for A according to A wasfound to be, Eqn.(10)
�⌧A(A) = TF = 2T0 + 4T 0 (48)
and the corresponding elapsed proper time of B accordingto A, from Eqn.(42)
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (49)
The first terms in both Eqn.(48) and Eqn.(49) are justthe special relativistic elapsed proper times for the twocoasting periods, for each twin. Since �V � 1 clearly thelapse of proper time for A is longer than for B in thosetwo periods,
2T0 � 2T0
�V. (50)
This inequality corresponds to the usual resolution ofthe twin paradox, when the accelerating periods are ne-glected, according to the twin A, who does not move. Itis also the source of the twin paradox, if we neglect theaccelerated parts of the trajectory and invoke completesymmetry between the coasting portions of the trajec-tory. Then, twin B could make the same conclusion aboutthe “motion” of twin A, and come up with the paradox
that it must be in fact twin A who is younger. As wewill explicitly see, it is wrong to neglect the acceleratedpart of the trajectory of twin B and it is wrong to imag-ine that the motion is completely symmetric even for theunaccelerated, coasting parts of the trajectories.
Looking in detail at the lapse of proper time duringthe accelerating periods, we can use the explicit analyticformula for the arcsinhx = ln(x+
px2 + 1) to write
4
garcsinh(gT 0) 4T 0
) gT 0 +p(gT 0)2 + 1 egT
0(51)
comparing the lapse of proper time during the accelerat-ing periods. The inequality (51) is not obviously valid,however it is easy to prove, see [16]. Therefore, for theaccelerating part of the trajectory, we also have
4
garcsinh(gT 0) 4T 0 (52)
and hence the elapsed proper time during the acceleratedpart of the trajectory is also greater for twin A than fortwin B.
Thus the calculation from A’s side clearly gives theexpected result, that A, who does not travel, will be olderthan B, when B, who does travel, returns.
C. Interlude
In this section, we will analyze the reference frame,more generally the coordinate system, that is appropri-ate for twin B. We will impose that in this coordinatesystem, twin B’s position is always at rest at its origin;twin B does not move in his or her coordinate system.Then, it cannot be a simple inertial reference frame, astwin B suffers acceleration. During the coasting periodsthe coordinate system of twin B will simply be an in-ertial reference frame, however, during the acceleratingperiods, it must be something different.
1. Accelerating phase
The coordinate system during the accelerating phasecannot be an inertial reference frame, as any inertial ob-server will see twin B as accelerating. Taking a hint fromthe expressions for the coordinates of B according to A asa function of the proper time of B, Eqns.(46,47), we con-sider the transformation of coordinates between (T,X)for twin A and (T , X) for twin B
X =
✓1
g+ X
◆cosh(gT )� 1
g(53)
T =
✓1
g+ X
◆sinh(gT ) . (54)
7
We will find it useful in the sequel, to treat the propertime of B, ⌧B as the independent variable, invertingEqn.(40) as
TB(⌧B) =1
gsinh(g⌧B). (43)
With Eqn. (36) and (40), one can easily determine XB
as a function of ⌧B. Indeed,✓dXB(⌧B)
d⌧B
◆2
=
✓dTB(⌧B)
d⌧B
◆2
� 1
= cosh2(g⌧B)� 1
= sinh2(g⌧B). (44)
This integrates trivially as
XB(⌧B) =1
gcosh(g⌧B)�
1
g(45)
imposing the boundary condition that XB(⌧B = 0) = 0.Thus we find a unified expression, which will be usedlater,
XB(⌧B) =1
gcosh(g⌧B)�
1
g(46)
TB(⌧B) =1
gsinh(g⌧B) . (47)
4. Resolution of the twin paradox according to A
The elapsed proper time for A according to A wasfound to be, Eqn.(10)
�⌧A(A) = TF = 2T0 + 4T 0 (48)
and the corresponding elapsed proper time of B accordingto A, from Eqn.(42)
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (49)
The first terms in both Eqn.(48) and Eqn.(49) are justthe special relativistic elapsed proper times for the twocoasting periods, for each twin. Since �V � 1 clearly thelapse of proper time for A is longer than for B in thosetwo periods,
2T0 � 2T0
�V. (50)
This inequality corresponds to the usual resolution ofthe twin paradox, when the accelerating periods are ne-glected, according to the twin A, who does not move. Itis also the source of the twin paradox, if we neglect theaccelerated parts of the trajectory and invoke completesymmetry between the coasting portions of the trajec-tory. Then, twin B could make the same conclusion aboutthe “motion” of twin A, and come up with the paradox
that it must be in fact twin A who is younger. As wewill explicitly see, it is wrong to neglect the acceleratedpart of the trajectory of twin B and it is wrong to imag-ine that the motion is completely symmetric even for theunaccelerated, coasting parts of the trajectories.
Looking in detail at the lapse of proper time duringthe accelerating periods, we can use the explicit analyticformula for the arcsinhx = ln(x+
px2 + 1) to write
4
garcsinh(gT 0) 4T 0
) gT 0 +p(gT 0)2 + 1 egT
0(51)
comparing the lapse of proper time during the accelerat-ing periods. The inequality (51) is not obviously valid,however it is easy to prove, see [16]. Therefore, for theaccelerating part of the trajectory, we also have
4
garcsinh(gT 0) 4T 0 (52)
and hence the elapsed proper time during the acceleratedpart of the trajectory is also greater for twin A than fortwin B.
Thus the calculation from A’s side clearly gives theexpected result, that A, who does not travel, will be olderthan B, when B, who does travel, returns.
C. Interlude
In this section, we will analyze the reference frame,more generally the coordinate system, that is appropri-ate for twin B. We will impose that in this coordinatesystem, twin B’s position is always at rest at its origin;twin B does not move in his or her coordinate system.Then, it cannot be a simple inertial reference frame, astwin B suffers acceleration. During the coasting periodsthe coordinate system of twin B will simply be an in-ertial reference frame, however, during the acceleratingperiods, it must be something different.
1. Accelerating phase
The coordinate system during the accelerating phasecannot be an inertial reference frame, as any inertial ob-server will see twin B as accelerating. Taking a hint fromthe expressions for the coordinates of B according to A asa function of the proper time of B, Eqns.(46,47), we con-sider the transformation of coordinates between (T,X)for twin A and (T , X) for twin B
X =
✓1
g+ X
◆cosh(gT )� 1
g(53)
T =
✓1
g+ X
◆sinh(gT ) . (54)

• This suggests the coordinates: • (Kottler-Rindler coordinates)
• which satisfy:
• B sits at in this coordinate system. • The metric transforms to:
• Thus the elapsed proper time of B according to B is just the elapsed coordinate time. An easy calculation gives:
7
We will find it useful in the sequel, to treat the propertime of B, ⌧B as the independent variable, invertingEqn.(40) as
TB(⌧B) =1
gsinh(g⌧B). (43)
With Eqn. (36) and (40), one can easily determine XB
as a function of ⌧B. Indeed,✓dXB(⌧B)
d⌧B
◆2
=
✓dTB(⌧B)
d⌧B
◆2
� 1
= cosh2(g⌧B)� 1
= sinh2(g⌧B). (44)
This integrates trivially as
XB(⌧B) =1
gcosh(g⌧B)�
1
g(45)
imposing the boundary condition that XB(⌧B = 0) = 0.Thus we find a unified expression, which will be usedlater,
XB(⌧B) =1
gcosh(g⌧B)�
1
g(46)
TB(⌧B) =1
gsinh(g⌧B) . (47)
4. Resolution of the twin paradox according to A
The elapsed proper time for A according to A wasfound to be, Eqn.(10)
�⌧A(A) = TF = 2T0 + 4T 0 (48)
and the corresponding elapsed proper time of B accordingto A, from Eqn.(42)
�⌧B(A) =2T0
�V+
4
garcsinh(gT 0) . (49)
The first terms in both Eqn.(48) and Eqn.(49) are justthe special relativistic elapsed proper times for the twocoasting periods, for each twin. Since �V � 1 clearly thelapse of proper time for A is longer than for B in thosetwo periods,
2T0 � 2T0
�V. (50)
This inequality corresponds to the usual resolution ofthe twin paradox, when the accelerating periods are ne-glected, according to the twin A, who does not move. Itis also the source of the twin paradox, if we neglect theaccelerated parts of the trajectory and invoke completesymmetry between the coasting portions of the trajec-tory. Then, twin B could make the same conclusion aboutthe “motion” of twin A, and come up with the paradox
that it must be in fact twin A who is younger. As wewill explicitly see, it is wrong to neglect the acceleratedpart of the trajectory of twin B and it is wrong to imag-ine that the motion is completely symmetric even for theunaccelerated, coasting parts of the trajectories.
Looking in detail at the lapse of proper time duringthe accelerating periods, we can use the explicit analyticformula for the arcsinhx = ln(x+
px2 + 1) to write
4
garcsinh(gT 0) 4T 0
) gT 0 +p(gT 0)2 + 1 egT
0(51)
comparing the lapse of proper time during the accelerat-ing periods. The inequality (51) is not obviously valid,however it is easy to prove, see [16]. Therefore, for theaccelerating part of the trajectory, we also have
4
garcsinh(gT 0) 4T 0 (52)
and hence the elapsed proper time during the acceleratedpart of the trajectory is also greater for twin A than fortwin B.
Thus the calculation from A’s side clearly gives theexpected result, that A, who does not travel, will be olderthan B, when B, who does travel, returns.
C. Interlude
In this section, we will analyze the reference frame,more generally the coordinate system, that is appropri-ate for twin B. We will impose that in this coordinatesystem, twin B’s position is always at rest at its origin;twin B does not move in his or her coordinate system.Then, it cannot be a simple inertial reference frame, astwin B suffers acceleration. During the coasting periodsthe coordinate system of twin B will simply be an in-ertial reference frame, however, during the acceleratingperiods, it must be something different.
1. Accelerating phase
The coordinate system during the accelerating phasecannot be an inertial reference frame, as any inertial ob-server will see twin B as accelerating. Taking a hint fromthe expressions for the coordinates of B according to A asa function of the proper time of B, Eqns.(46,47), we con-sider the transformation of coordinates between (T,X)for twin A and (T , X) for twin B
X =
✓1
g+ X
◆cosh(gT )� 1
g(53)
T =
✓1
g+ X
◆sinh(gT ) . (54)
8
with the corresponding (somewhat more complicated) in-verse transformation
X =
vuut ✓
X +1
g
◆2
� T 2
!� 1
g(55)
T =1
garctanh
T
X + 1g
!. (56)
These coordinates, (T , X), are called Kottler-Rindler [8–10] coordinates and they are valid in the Kottler-Rindlerwedge defined by X 2 [� 1
g ,1] and |T | X + 1g or cor-
respondingly, X 2 [� 1g ,1] and T 2 [�1,1]. There are
in fact, a multitude of coordinates that can be assignedto twin B, however the Kottler-Rindler system is conve-nient since there is a physical interpretation for (T , X).Clearly for X = 0 we regain Eqns. (46) and (47), addinglabels to make clear these are the positions and time ofB according to A in terms of T according to B,
XB =1
gcosh(gTB)�
1
g(57)
TB =1
gsinh(gTB) . (58)
Thus we can confidently ascribe the coordinates (T , X)to twin B, and in these coordinates, twin B sits at X = 0throughout the accelerating phase. This also means thatthe coordinate T can in fact be identified with the propertime for twin B by comparison again with Eqns. (46) and(47). We will verify this fact by explicitly computing themetric in the coordinates (T , X).
Different constant values of X correspond to objectsor observers that are moving with respect to twin A,but staying at a fixed coordinate distance X from twin Bduring the accelerating phase. At fixed X, Eqns, (53) and(54) correspond to hyperbolas in the coordinate system(X,T ). Indeed
✓X +
1
g
◆2
� T 2 =
✓1
g+ X
◆2
(59)
which is a family of hyperbolas parametrized by X. Thusan observer with fixed X moves along the correspondinghyperbola as T evolves. This observer is also a uni-formly accelerated observer however with accelerationg/⇣1 + gX
⌘, with the initial position that at T = 0
this observer is at the position (T,X) = (0, X). Thecoordinate distance according to twin A, between an ob-server at X = 0 and one at fixed X 6= 0 is not constant.This distance grows proportional to cosh(gT ). Hence, forexample, a rigid body must have different accelerationsfrom one end to the other if it is to not contract or expandduring its trajectory. We will not pursue this aspect ofthe Kottler-Rindler system of coordinates here. On theother hand, curves of fixed T correspond to
T =
✓X +
1
g
◆tanh(gT ) (60)
which are straight lines of slope tanh(gT ) passingthrough the point (� 1
g , 0), which is the focus of the hy-perbolas Eqn.(59).
The velocity of twin B according to twin A is given by
VB =dXB
dTB=
dX
dT
����X=0
. (61)
The constraint X = 0 implicitly defines X as a functionof T through the hyperbola in Eqn.(59). When X = 0, weare explicitly describing the trajectory of B in coordinatesof A, and thus we should replace X ! XB and T ! TB.Differentiating Eqn.(59) gives
✓XB +
1
g
◆✓dXB
dTB
����X=0
◆� TB = 0 (62)
and solving for the velocity gives
VB =dXB
dTB
����X=0
=TB⇣
XB + 1g
⌘ =TBs⇣
1g + X
⌘2����X=0
+ T 2B
=gTBp
1 + (gTB)2(63)
as we found previously for the uniformly accelerated ob-server in Eqn.(31). The accelerating phase of twin B mustend when twin A measures time T 0 in reference frame R,as in Fig. (1). Hence we define T 0, from Eqn.(58) as
T 0 =1
gsinh(gT 0) (64)
the coordinate time according to twin B when the accel-eration stops, and
V =gT 0
p1 + (gT 0)2
= tanh(gT 0). (65)
We can ask where does twin A appear in the coordi-nates (T , X) as far a twin B is concerned? From Eqn.(53)we have the position X = 0 corresponds to
0 =
✓1
g+ X
◆cosh(gT )� 1
g. (66)
This is easily solved for X as
X(T ) =1
g
⇣sech(gT )� 1
⌘(67)
which asymptotes to X = � 1g . Notice that sech(x) 1,
hence twin B sees twin A as moving in the negative Xdirection, but as far as twin B is concerned, twin A movesin the negative X direction but never manages to escape,achieving asymptotically � 1
g as T ! 1, if indeed twinB accelerated forever.
This boundary is called the horizon or edge of theRindler wedge, the accelerated observer cannot see the
8
with the corresponding (somewhat more complicated) in-verse transformation
X =
vuut ✓
X +1
g
◆2
� T 2
!� 1
g(55)
T =1
garctanh
T
X + 1g
!. (56)
These coordinates, (T , X), are called Kottler-Rindler [8–10] coordinates and they are valid in the Kottler-Rindlerwedge defined by X 2 [� 1
g ,1] and |T | X + 1g or cor-
respondingly, X 2 [� 1g ,1] and T 2 [�1,1]. There are
in fact, a multitude of coordinates that can be assignedto twin B, however the Kottler-Rindler system is conve-nient since there is a physical interpretation for (T , X).Clearly for X = 0 we regain Eqns. (46) and (47), addinglabels to make clear these are the positions and time ofB according to A in terms of T according to B,
XB =1
gcosh(gTB)�
1
g(57)
TB =1
gsinh(gTB) . (58)
Thus we can confidently ascribe the coordinates (T , X)to twin B, and in these coordinates, twin B sits at X = 0throughout the accelerating phase. This also means thatthe coordinate T can in fact be identified with the propertime for twin B by comparison again with Eqns. (46) and(47). We will verify this fact by explicitly computing themetric in the coordinates (T , X).
Different constant values of X correspond to objectsor observers that are moving with respect to twin A,but staying at a fixed coordinate distance X from twin Bduring the accelerating phase. At fixed X, Eqns, (53) and(54) correspond to hyperbolas in the coordinate system(X,T ). Indeed
✓X +
1
g
◆2
� T 2 =
✓1
g+ X
◆2
(59)
which is a family of hyperbolas parametrized by X. Thusan observer with fixed X moves along the correspondinghyperbola as T evolves. This observer is also a uni-formly accelerated observer however with accelerationg/⇣1 + gX
⌘, with the initial position that at T = 0
this observer is at the position (T,X) = (0, X). Thecoordinate distance according to twin A, between an ob-server at X = 0 and one at fixed X 6= 0 is not constant.This distance grows proportional to cosh(gT ). Hence, forexample, a rigid body must have different accelerationsfrom one end to the other if it is to not contract or expandduring its trajectory. We will not pursue this aspect ofthe Kottler-Rindler system of coordinates here. On theother hand, curves of fixed T correspond to
T =
✓X +
1
g
◆tanh(gT ) (60)
which are straight lines of slope tanh(gT ) passingthrough the point (� 1
g , 0), which is the focus of the hy-perbolas Eqn.(59).
The velocity of twin B according to twin A is given by
VB =dXB
dTB=
dX
dT
����X=0
. (61)
The constraint X = 0 implicitly defines X as a functionof T through the hyperbola in Eqn.(59). When X = 0, weare explicitly describing the trajectory of B in coordinatesof A, and thus we should replace X ! XB and T ! TB.Differentiating Eqn.(59) gives
✓XB +
1
g
◆✓dXB
dTB
����X=0
◆� TB = 0 (62)
and solving for the velocity gives
VB =dXB
dTB
����X=0
=TB⇣
XB + 1g
⌘ =TBs⇣
1g + X
⌘2����X=0
+ T 2B
=gTBp
1 + (gTB)2(63)
as we found previously for the uniformly accelerated ob-server in Eqn.(31). The accelerating phase of twin B mustend when twin A measures time T 0 in reference frame R,as in Fig. (1). Hence we define T 0, from Eqn.(58) as
T 0 =1
gsinh(gT 0) (64)
the coordinate time according to twin B when the accel-eration stops, and
V =gT 0
p1 + (gT 0)2
= tanh(gT 0). (65)
We can ask where does twin A appear in the coordi-nates (T , X) as far a twin B is concerned? From Eqn.(53)we have the position X = 0 corresponds to
0 =
✓1
g+ X
◆cosh(gT )� 1
g. (66)
This is easily solved for X as
X(T ) =1
g
⇣sech(gT )� 1
⌘(67)
which asymptotes to X = � 1g . Notice that sech(x) 1,
hence twin B sees twin A as moving in the negative Xdirection, but as far as twin B is concerned, twin A movesin the negative X direction but never manages to escape,achieving asymptotically � 1
g as T ! 1, if indeed twinB accelerated forever.
This boundary is called the horizon or edge of theRindler wedge, the accelerated observer cannot see the
9
whole of the Minkowski spacetime. As we noted before,the limits to the Kottler-Rindler coordinates correspondto the lines, in Minkowski spacetime,
X = ±T � 1
g. (68)
These are lines of slope ±1 that pass through X = � 1g
at T = 0. Of course, in this limit, according to twin A,the position of twin B is at X = 1
g cosh(gT ) �1g ! 1
and T = 1g sinh(gT ) ! 1.
The point is that the Kottler-Rindler coordinates onlycover the patch of Minkowski coordinates with
✓X +
1
g
◆2
� T 2 (69)
which is a wedge of Minkowski space bounded by thelines of slope ±1 that pass through X = � 1
g at T = 0.Twin A, who sits at X = 0 can only move from T = 0 toT = 1
g as T ! +1 as is clear from Eqn.(60). Of course,this is not a physical restriction, only an artefact of theKottler-Rindler coordinate system, observers at X = 0can move well past gT = 1, simply they are no longerpart of the Kottler-Rindler coordinate system.
Thus the apparent motion of twin A according to twinB, cannot be described fully for the accelerating part ofthe trajectory if the trajectory requires that gT � 1. TheKottler-Rindler coordinates are not expansive enough tocover the whole of Minkowski spacetime, and we mustpatch on new coordinates to cover the part of the space-time for gT � 1. However, for short enough accelera-tions, the Kottler-Rindler coordinates are perfectly fine.This is not a great restriction, physically, staying withinthe Kottler-Rindler wedge only requires that the velocityachieved by the travelling twin be less than VB = 1/
p2,
which is quite relativistic and obtained by putting gT = 1in Eqn.(63). We will assume that the acceleration lastsfor such amount of time that the Kottler-Rindler coordi-nates describe the trajectories completely, for each twin.The formulae that we will finally realize, will be analyticfunctions of the Minkowski coordinates, and we are confi-dent that the machinery of differential geometry will givethe same analytic expressions if in fact we must patch onmore coordinates to cover the parts of Minkowski space-time that are not covered by the Kottler-Rindler coordi-nate system.
The metric in Kottler-Rindler coordinates is easily ob-tained from the Minkowski metric. First we find the dif-ferentials
dT = dX sinh(gT ) +
✓1
g+ X
◆g cosh(gT ) (70)
dX = dX cosh(gT ) +
✓1
g+ X
◆g sinh(gT ) (71)
and then the metric is given by
d⌧2 = dT 2 � dX2
=
✓dX sinh(gT ) +
✓1
g+ X
◆g cosh(gT )
◆2
�✓dX cosh(gT ) +
✓1
g+ X
◆g sinh(gT )
◆2
=⇣1 + gX
⌘2dT 2 � dX2. (72)
Thus we confirm explicitly, for twin B which correspondsto X = 0, we have
d⌧2 = dT 2 (73)
and the lapse of proper time �⌧B(B) = �TB, the lapse ofcoordinate time of B. We underline that this is only truefor B, for other observers or objects, for example twin A,which move at X 6= 0 will not have this simple relationbetween the proper time and the coordinate time, andthe full metric given in Eqn.(72) must be used.
2. Coasting phase
During the coasting phase the coordinate system oftwin B will be an inertial reference frame. Thus we willhave a simple Lorentz transformation between the coor-dinates of A and B:
X �X 0 = �V⇣X + V
⇣T � T 0
⌘⌘(74)
T � T 0 = �V⇣V X +
⇣T � T 0
⌘⌘(75)
The Lorentz transformation has been appropriatelyshifted so that when the coordinates of B, (T , X) =(T 0, 0), (T 0 was defined by Eqn.(64)), the coordinates Aare given by (T,X) = (T 0, X 0) which is the start of thecoasting period.
According to A, the coasting period lasts for a coordi-nate time T0 during which B moves from X 0 to X 0 + Lat velocity V . From B’s point of view, the point withcoordinates X 0 +L according to A, is moving towards Bwith velocity �V while B is always just staying at X = 0.Replacing X = X 0 + L and (T , X) = (T 0, L) in Eqn.(74)we find
L = �V L (76)
and therefore, L = L/�V < L. This is the first clear signthat the two coasting periods are not symmetric. Thedistance to the beginning of the decelerating phase ac-cording to A is L, but according to B it is L/�V . Whydoes this asymmetry come about? It is because thereis a physical turn around point, a distance L away fromwhen B starts to coast, according to A. A measures thisdistance at rest, and therefore L represents the properlength of the space interval between A and whatever the
9
whole of the Minkowski spacetime. As we noted before,the limits to the Kottler-Rindler coordinates correspondto the lines, in Minkowski spacetime,
X = ±T � 1
g. (68)
These are lines of slope ±1 that pass through X = � 1g
at T = 0. Of course, in this limit, according to twin A,the position of twin B is at X = 1
g cosh(gT ) �1g ! 1
and T = 1g sinh(gT ) ! 1.
The point is that the Kottler-Rindler coordinates onlycover the patch of Minkowski coordinates with
✓X +
1
g
◆2
� T 2 (69)
which is a wedge of Minkowski space bounded by thelines of slope ±1 that pass through X = � 1
g at T = 0.Twin A, who sits at X = 0 can only move from T = 0 toT = 1
g as T ! +1 as is clear from Eqn.(60). Of course,this is not a physical restriction, only an artefact of theKottler-Rindler coordinate system, observers at X = 0can move well past gT = 1, simply they are no longerpart of the Kottler-Rindler coordinate system.
Thus the apparent motion of twin A according to twinB, cannot be described fully for the accelerating part ofthe trajectory if the trajectory requires that gT � 1. TheKottler-Rindler coordinates are not expansive enough tocover the whole of Minkowski spacetime, and we mustpatch on new coordinates to cover the part of the space-time for gT � 1. However, for short enough accelera-tions, the Kottler-Rindler coordinates are perfectly fine.This is not a great restriction, physically, staying withinthe Kottler-Rindler wedge only requires that the velocityachieved by the travelling twin be less than VB = 1/
p2,
which is quite relativistic and obtained by putting gT = 1in Eqn.(63). We will assume that the acceleration lastsfor such amount of time that the Kottler-Rindler coordi-nates describe the trajectories completely, for each twin.The formulae that we will finally realize, will be analyticfunctions of the Minkowski coordinates, and we are confi-dent that the machinery of differential geometry will givethe same analytic expressions if in fact we must patch onmore coordinates to cover the parts of Minkowski space-time that are not covered by the Kottler-Rindler coordi-nate system.
The metric in Kottler-Rindler coordinates is easily ob-tained from the Minkowski metric. First we find the dif-ferentials
dT = dX sinh(gT ) +
✓1
g+ X
◆g cosh(gT ) (70)
dX = dX cosh(gT ) +
✓1
g+ X
◆g sinh(gT ) (71)
and then the metric is given by
d⌧2 = dT 2 � dX2
=
✓dX sinh(gT ) +
✓1
g+ X
◆g cosh(gT )
◆2
�✓dX cosh(gT ) +
✓1
g+ X
◆g sinh(gT )
◆2
=⇣1 + gX
⌘2dT 2 � dX2. (72)
Thus we confirm explicitly, for twin B which correspondsto X = 0, we have
d⌧2 = dT 2 (73)
and the lapse of proper time �⌧B(B) = �TB, the lapse ofcoordinate time of B. We underline that this is only truefor B, for other observers or objects, for example twin A,which move at X 6= 0 will not have this simple relationbetween the proper time and the coordinate time, andthe full metric given in Eqn.(72) must be used.
2. Coasting phase
During the coasting phase the coordinate system oftwin B will be an inertial reference frame. Thus we willhave a simple Lorentz transformation between the coor-dinates of A and B:
X �X 0 = �V⇣X + V
⇣T � T 0
⌘⌘(74)
T � T 0 = �V⇣V X +
⇣T � T 0
⌘⌘(75)
The Lorentz transformation has been appropriatelyshifted so that when the coordinates of B, (T , X) =(T 0, 0), (T 0 was defined by Eqn.(64)), the coordinates Aare given by (T,X) = (T 0, X 0) which is the start of thecoasting period.
According to A, the coasting period lasts for a coordi-nate time T0 during which B moves from X 0 to X 0 + Lat velocity V . From B’s point of view, the point withcoordinates X 0 +L according to A, is moving towards Bwith velocity �V while B is always just staying at X = 0.Replacing X = X 0 + L and (T , X) = (T 0, L) in Eqn.(74)we find
L = �V L (76)
and therefore, L = L/�V < L. This is the first clear signthat the two coasting periods are not symmetric. Thedistance to the beginning of the decelerating phase ac-cording to A is L, but according to B it is L/�V . Whydoes this asymmetry come about? It is because thereis a physical turn around point, a distance L away fromwhen B starts to coast, according to A. A measures thisdistance at rest, and therefore L represents the properlength of the space interval between A and whatever the
11
For the coasting period � we must compute the changein the coordinate time of B according to B and then con-vert this to proper time of B according to B. The coastingperiod starts at (T , X) = (T 0, 0) and ends when the co-ordinates of A are (T 0 + T0, X 0 + L). Replacing the endcoordinates into Eqn.(75), imposing X = 0 and labellingT0 + T 0 as the coordinate time when the coasting phasestops, (clearly T0 is the elapsed coordinate time duringthe coasting phase according to B), we find
T0 = �V⇣(T0 + T 0)� T 0
⌘, (86)
which gives
T0 =T0
�V. (87)
The elapsed coordinate time for B is shorter than theelapsed coordinate time for A which makes plain the lackof symmetry between the two twins during the coastingperiod.
The corresponding elapsed proper time of B then isthen easily computed as the metric is just the Minkowskimetric
d⌧2 = dT 2 � dX2 = dT 2 (88)
since dX = 0. Integrating from T 0 ! T 0 + T0 gives
�⌧B,�(B) = T0 =T0
�V. (89)
Adding all the contributions together from Eqns. (85)and (90) and invoking symmetry for the return part ofthe journey, we find
�⌧B(B) = (�⌧B,↵(B) +�⌧B,�(B) +�⌧B,�(B))⇥ 2
= 2T0
�V+ 4
1
garcsinh (gT 0) (90)
which is exactly the same as what A calculated, Eqn.(49)
�⌧B(B) = �⌧B(A). (91)
E. Elapsed proper time of A according to B
Finally, we must compute the elapsed proper time ofA according to B. This is the most complicated of thecalculations. We have only seen such a calculation usingthe machinery of differential geometry and general rela-tivity [3]. Here we will show how to do the calculationusing only simple changes of variable, which are actuallythe coordinates. No knowledge of general relativity ordifferential geometry is required. It is clear that we mustonly compute the proper time for the phases ↵,�, �, therest of the trajectory just gives twice this answer.
1. Accelerating phase
During the accelerating phase we have found the co-ordinate transformation given in Eqns.(53) and (54) isappropriate. In this transformation, twin A stays put atX = 0. This gives
0 =
✓1
g+ X
◆cosh(gT )� 1
g(92)
T =
✓1
g+ X
◆sinh(gT ) (93)
which can be solved for X as
XA =1
g
⇣sech(gTA)� 1
⌘. (94)
Replacing this in Eqn.(93) gives
TA =1
gtanh(gTA). (95)
We note that remarkably, this relation between TA andTA for the motion of A according to B is not the sameas the relation between TB and TB for the motion of Baccording to B given in Eqn.(58):
TB =1
gsinh(gTB). (96)
The accelerating phase terminates when TB = T 0 thetime of B according to A and in principle when TA = T 0
the time of A according to A. These times (according toA) give rise to different times for when the accelerationstops, according to B. This is easily understood by thenotion of the relativity of simultaneity. The two eventswhen TA = T 0 and when TB = T 0 are simultaneous ac-cording to A, but occur at different spatial points. Al-though they are simultaneous for A, they are not for B.Drawing the surfaces of simultaneity, in each twin’s ref-erence frame, we would see, for example, that when B’sproper time is such that the initial acceleration periodstops, two different times are relevant to describe A. InA’s frame, B stopping is simultaneous to A having agedT = T 0, which is the description encoded in Eqn.(96).However, what is now relevant is that in B’s frame, Bstopping is simultaneous to A having aged according toEqn.(95).
There is also another mismatch that occurs that isworth elaborating. The velocity of A according to B atthe end of the accelerating phase will be
VA(B) =dXA
dT
�����T 0
= � tanh(gT 0) sech(gT 0)
6= �V = � tanh(gT 0) (97)
Thus B at the end of the accelerating phase, does notsee A receding with velocity �V but with a somewhat
11
For the coasting period � we must compute the changein the coordinate time of B according to B and then con-vert this to proper time of B according to B. The coastingperiod starts at (T , X) = (T 0, 0) and ends when the co-ordinates of A are (T 0 + T0, X 0 + L). Replacing the endcoordinates into Eqn.(75), imposing X = 0 and labellingT0 + T 0 as the coordinate time when the coasting phasestops, (clearly T0 is the elapsed coordinate time duringthe coasting phase according to B), we find
T0 = �V⇣(T0 + T 0)� T 0
⌘, (86)
which gives
T0 =T0
�V. (87)
The elapsed coordinate time for B is shorter than theelapsed coordinate time for A which makes plain the lackof symmetry between the two twins during the coastingperiod.
The corresponding elapsed proper time of B then isthen easily computed as the metric is just the Minkowskimetric
d⌧2 = dT 2 � dX2 = dT 2 (88)
since dX = 0. Integrating from T 0 ! T 0 + T0 gives
�⌧B,�(B) = T0 =T0
�V. (89)
Adding all the contributions together from Eqns. (85)and (90) and invoking symmetry for the return part ofthe journey, we find
�⌧B(B) = (�⌧B,↵(B) +�⌧B,�(B) +�⌧B,�(B))⇥ 2
= 2T0
�V+ 4
1
garcsinh (gT 0) (90)
which is exactly the same as what A calculated, Eqn.(49)
�⌧B(B) = �⌧B(A). (91)
E. Elapsed proper time of A according to B
Finally, we must compute the elapsed proper time ofA according to B. This is the most complicated of thecalculations. We have only seen such a calculation usingthe machinery of differential geometry and general rela-tivity [3]. Here we will show how to do the calculationusing only simple changes of variable, which are actuallythe coordinates. No knowledge of general relativity ordifferential geometry is required. It is clear that we mustonly compute the proper time for the phases ↵,�, �, therest of the trajectory just gives twice this answer.
1. Accelerating phase
During the accelerating phase we have found the co-ordinate transformation given in Eqns.(53) and (54) isappropriate. In this transformation, twin A stays put atX = 0. This gives
0 =
✓1
g+ X
◆cosh(gT )� 1
g(92)
T =
✓1
g+ X
◆sinh(gT ) (93)
which can be solved for X as
XA =1
g
⇣sech(gTA)� 1
⌘. (94)
Replacing this in Eqn.(93) gives
TA =1
gtanh(gTA). (95)
We note that remarkably, this relation between TA andTA for the motion of A according to B is not the sameas the relation between TB and TB for the motion of Baccording to B given in Eqn.(58):
TB =1
gsinh(gTB). (96)
The accelerating phase terminates when TB = T 0 thetime of B according to A and in principle when TA = T 0
the time of A according to A. These times (according toA) give rise to different times for when the accelerationstops, according to B. This is easily understood by thenotion of the relativity of simultaneity. The two eventswhen TA = T 0 and when TB = T 0 are simultaneous ac-cording to A, but occur at different spatial points. Al-though they are simultaneous for A, they are not for B.Drawing the surfaces of simultaneity, in each twin’s ref-erence frame, we would see, for example, that when B’sproper time is such that the initial acceleration periodstops, two different times are relevant to describe A. InA’s frame, B stopping is simultaneous to A having agedT = T 0, which is the description encoded in Eqn.(96).However, what is now relevant is that in B’s frame, Bstopping is simultaneous to A having aged according toEqn.(95).
There is also another mismatch that occurs that isworth elaborating. The velocity of A according to B atthe end of the accelerating phase will be
VA(B) =dXA
dT
�����T 0
= � tanh(gT 0) sech(gT 0)
6= �V = � tanh(gT 0) (97)
Thus B at the end of the accelerating phase, does notsee A receding with velocity �V but with a somewhat
11
For the coasting period � we must compute the changein the coordinate time of B according to B and then con-vert this to proper time of B according to B. The coastingperiod starts at (T , X) = (T 0, 0) and ends when the co-ordinates of A are (T 0 + T0, X 0 + L). Replacing the endcoordinates into Eqn.(75), imposing X = 0 and labellingT0 + T 0 as the coordinate time when the coasting phasestops, (clearly T0 is the elapsed coordinate time duringthe coasting phase according to B), we find
T0 = �V⇣(T0 + T 0)� T 0
⌘, (86)
which gives
T0 =T0
�V. (87)
The elapsed coordinate time for B is shorter than theelapsed coordinate time for A which makes plain the lackof symmetry between the two twins during the coastingperiod.
The corresponding elapsed proper time of B then isthen easily computed as the metric is just the Minkowskimetric
d⌧2 = dT 2 � dX2 = dT 2 (88)
since dX = 0. Integrating from T 0 ! T 0 + T0 gives
�⌧B,�(B) = T0 =T0
�V. (89)
Adding all the contributions together from Eqns. (85)and (90) and invoking symmetry for the return part ofthe journey, we find
�⌧B(B) = (�⌧B,↵(B) +�⌧B,�(B) +�⌧B,�(B))⇥ 2
= 2T0
�V+ 4
1
garcsinh (gT 0) (90)
which is exactly the same as what A calculated, Eqn.(49)
�⌧B(B) = �⌧B(A). (91)
E. Elapsed proper time of A according to B
Finally, we must compute the elapsed proper time ofA according to B. This is the most complicated of thecalculations. We have only seen such a calculation usingthe machinery of differential geometry and general rela-tivity [3]. Here we will show how to do the calculationusing only simple changes of variable, which are actuallythe coordinates. No knowledge of general relativity ordifferential geometry is required. It is clear that we mustonly compute the proper time for the phases ↵,�, �, therest of the trajectory just gives twice this answer.
1. Accelerating phase
During the accelerating phase we have found the co-ordinate transformation given in Eqns.(53) and (54) isappropriate. In this transformation, twin A stays put atX = 0. This gives
0 =
✓1
g+ X
◆cosh(gT )� 1
g(92)
T =
✓1
g+ X
◆sinh(gT ) (93)
which can be solved for X as
XA =1
g
⇣sech(gTA)� 1
⌘. (94)
Replacing this in Eqn.(93) gives
TA =1
gtanh(gTA). (95)
We note that remarkably, this relation between TA andTA for the motion of A according to B is not the sameas the relation between TB and TB for the motion of Baccording to B given in Eqn.(58):
TB =1
gsinh(gTB). (96)
The accelerating phase terminates when TB = T 0 thetime of B according to A and in principle when TA = T 0
the time of A according to A. These times (according toA) give rise to different times for when the accelerationstops, according to B. This is easily understood by thenotion of the relativity of simultaneity. The two eventswhen TA = T 0 and when TB = T 0 are simultaneous ac-cording to A, but occur at different spatial points. Al-though they are simultaneous for A, they are not for B.Drawing the surfaces of simultaneity, in each twin’s ref-erence frame, we would see, for example, that when B’sproper time is such that the initial acceleration periodstops, two different times are relevant to describe A. InA’s frame, B stopping is simultaneous to A having agedT = T 0, which is the description encoded in Eqn.(96).However, what is now relevant is that in B’s frame, Bstopping is simultaneous to A having aged according toEqn.(95).
There is also another mismatch that occurs that isworth elaborating. The velocity of A according to B atthe end of the accelerating phase will be
VA(B) =dXA
dT
�����T 0
= � tanh(gT 0) sech(gT 0)
6= �V = � tanh(gT 0) (97)
Thus B at the end of the accelerating phase, does notsee A receding with velocity �V but with a somewhat

Elapsed proper time of A according to B• We have seen that during the coasting periods B computes
the elapsed proper time of A as 2 • Thus A has to age a lot during the accelerating periods,
according to B. We look at the decelerating period at the turn around point. Here the coordinates are obtained by replacing in the previous coordinate transformation:
• But we must shift the transformation so that it turns around at the right point:
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
10
turn around point is. There is a physical difference be-tween the two twins, A just stays put and is always in aninertial reference frame in which the turn around point isalso at rest. B moves and we know that B moves becausehe or she suffers acceleration. This same turn aroundpoint approaches B at velocity �V but is only a distanceL/�V away, according to B.
This asymmetry of the coasting periods does not seemto have been clearly identified in the extant literature. Itis this asymmetry that can be used to resolve the twinparadox if the calculation is done according to twin A.However, if the calculation is done according to twin B,this asymmetry only exacerbates the twin paradox. Ifonly this asymmetry is taken into account, then B findsthat A should be even younger than what A finds B tobe. In the calculation according to B, the acceleratingperiods, especially the acceleration at the turn aroundpoint, play a crucial role to resolve the paradox.
In conclusion, the usual manner in which the twinparadox is evinced, that the coasting periods are all thatreally matter, and that they are symmetric therefore eachtwin should think that the other is equally younger, issimply not true.
3. Decelerating phase
The periods of deceleration, � and �, will be associatedto somewhat different hyperbolas, but the motion is quitesimilar. We will simply replace g ! �g in Eqns. (53)and (54). This gives
X =
✓X � 1
g
◆cosh(gT ) +
1
g(77)
T = �✓X � 1
g
◆sinh(gT ) . (78)
with corresponding hyperbola
✓X � 1
g
◆2
� T 2 =
✓X � 1
g
◆2
, (79)
which is also a family of hyperbolas parametrized by X.We realize that we are interested in the left branch ofthis set of hyperbolas, which is the decelerating branch.This requires that X 1
g which then imposes that X 1g . Because of this, the time T and T run in the same
direction, in Eqn.(78), �⇣X � 1
g
⌘is positive.
Simple deceleration is not enough, we want that thetrajectory of the decelerating observer to be defined byX = 0, to pass through the turn around point at the cor-rect spacetime point in the coordinates of A, (TD, XD) =(T0 + 2T 0, X0 + 2X 0) when T = TD (the value of TD isactually not required for our analysis, it can of course bedetermined as the sum of the lapse of coordinate time ofB for the accelerating phase, the coasting phase and the
decelerating phase). Thus we shift the hyperbola as
X �XD =
✓X � 1
g
◆cosh(g
⇣T � TD
⌘) +
1
g(80)
T � TD = �✓X � 1
g
◆sinh(g
⇣T � TD
⌘) . (81)
This is now a hyperbola that passes through X = XD +X = X0 + 2X 0 + X and and T = TD = T0 + 2T 0 whenT = TD. Clearly
✓X �XD � 1
g
◆2
� (T � TD)2 =
✓X � 1
g
◆2
(82)
which is the equation of a family of hyperbolas,parametrized by X, symmetric about
⇣TD, XD + 1
g
⌘.
We choose the left branch (decelerating) by imposing thatX 1
g . As mentioned above, the hyperbola for X = 0
corresponds to the trajectory of twin B and at T = TD,twin B will be at the turn around point (XD, TD) in thecoordinate system of twin A.
It is easy to check that the metric in these coordinatesfor the decelerating phase is exactly as before except g !�g
d⌧2 =⇣1� gX
⌘2dT 2 � dX2. (83)
To compute the elapsed proper time for twin B duringthe decelerating phase, we should integrate T from TD �T 0 ! TD where T 0 is defined as the lapse of coordinatetime of B during the accelerating phase, during whichthe coordinate time of A increases from 0 to T 0. Thenfrom Eqn.(64), we have
T 0 =1
garcsinh (gT 0) . (84)
It is clear that to decelerate from V to 0 will take thesame amount of coordinate time for B as to acceleratefrom 0 to V . As the position of B is at X = 0, thelapse of coordinate time of B according to B during thedecelerating phase is simply equal to the lapse of propertime of B according to B and hence �⌧B,�(B) = T 0 =1g arcsinh (gT
0).
D. Elapsed proper time of B according to B
To compute the elapsed proper time of B according toB is very easy since according to B, B stays put at X = 0for the entire journey. For accelerating and deceleratingparts of the trajectory ↵ and for �, we have already cal-culated the elapsed proper time, from Eqn.(64) and fromEqn.(84) we have
�⌧B,↵ = �⌧B,� = T 0 =1
garcsinh (gT 0) . (85)
10
turn around point is. There is a physical difference be-tween the two twins, A just stays put and is always in aninertial reference frame in which the turn around point isalso at rest. B moves and we know that B moves becausehe or she suffers acceleration. This same turn aroundpoint approaches B at velocity �V but is only a distanceL/�V away, according to B.
This asymmetry of the coasting periods does not seemto have been clearly identified in the extant literature. Itis this asymmetry that can be used to resolve the twinparadox if the calculation is done according to twin A.However, if the calculation is done according to twin B,this asymmetry only exacerbates the twin paradox. Ifonly this asymmetry is taken into account, then B findsthat A should be even younger than what A finds B tobe. In the calculation according to B, the acceleratingperiods, especially the acceleration at the turn aroundpoint, play a crucial role to resolve the paradox.
In conclusion, the usual manner in which the twinparadox is evinced, that the coasting periods are all thatreally matter, and that they are symmetric therefore eachtwin should think that the other is equally younger, issimply not true.
3. Decelerating phase
The periods of deceleration, � and �, will be associatedto somewhat different hyperbolas, but the motion is quitesimilar. We will simply replace g ! �g in Eqns. (53)and (54). This gives
X =
✓X � 1
g
◆cosh(gT ) +
1
g(77)
T = �✓X � 1
g
◆sinh(gT ) . (78)
with corresponding hyperbola
✓X � 1
g
◆2
� T 2 =
✓X � 1
g
◆2
, (79)
which is also a family of hyperbolas parametrized by X.We realize that we are interested in the left branch ofthis set of hyperbolas, which is the decelerating branch.This requires that X 1
g which then imposes that X 1g . Because of this, the time T and T run in the same
direction, in Eqn.(78), �⇣X � 1
g
⌘is positive.
Simple deceleration is not enough, we want that thetrajectory of the decelerating observer to be defined byX = 0, to pass through the turn around point at the cor-rect spacetime point in the coordinates of A, (TD, XD) =(T0 + 2T 0, X0 + 2X 0) when T = TD (the value of TD isactually not required for our analysis, it can of course bedetermined as the sum of the lapse of coordinate time ofB for the accelerating phase, the coasting phase and the
decelerating phase). Thus we shift the hyperbola as
X �XD =
✓X � 1
g
◆cosh(g
⇣T � TD
⌘) +
1
g(80)
T � TD = �✓X � 1
g
◆sinh(g
⇣T � TD
⌘) . (81)
This is now a hyperbola that passes through X = XD +X = X0 + 2X 0 + X and and T = TD = T0 + 2T 0 whenT = TD. Clearly
✓X �XD � 1
g
◆2
� (T � TD)2 =
✓X � 1
g
◆2
(82)
which is the equation of a family of hyperbolas,parametrized by X, symmetric about
⇣TD, XD + 1
g
⌘.
We choose the left branch (decelerating) by imposing thatX 1
g . As mentioned above, the hyperbola for X = 0
corresponds to the trajectory of twin B and at T = TD,twin B will be at the turn around point (XD, TD) in thecoordinate system of twin A.
It is easy to check that the metric in these coordinatesfor the decelerating phase is exactly as before except g !�g
d⌧2 =⇣1� gX
⌘2dT 2 � dX2. (83)
To compute the elapsed proper time for twin B duringthe decelerating phase, we should integrate T from TD �T 0 ! TD where T 0 is defined as the lapse of coordinatetime of B during the accelerating phase, during whichthe coordinate time of A increases from 0 to T 0. Thenfrom Eqn.(64), we have
T 0 =1
garcsinh (gT 0) . (84)
It is clear that to decelerate from V to 0 will take thesame amount of coordinate time for B as to acceleratefrom 0 to V . As the position of B is at X = 0, thelapse of coordinate time of B according to B during thedecelerating phase is simply equal to the lapse of propertime of B according to B and hence �⌧B,�(B) = T 0 =1g arcsinh (gT
0).
D. Elapsed proper time of B according to B
To compute the elapsed proper time of B according toB is very easy since according to B, B stays put at X = 0for the entire journey. For accelerating and deceleratingparts of the trajectory ↵ and for �, we have already cal-culated the elapsed proper time, from Eqn.(64) and fromEqn.(84) we have
�⌧B,↵ = �⌧B,� = T 0 =1
garcsinh (gT 0) . (85)
10
turn around point is. There is a physical difference be-tween the two twins, A just stays put and is always in aninertial reference frame in which the turn around point isalso at rest. B moves and we know that B moves becausehe or she suffers acceleration. This same turn aroundpoint approaches B at velocity �V but is only a distanceL/�V away, according to B.
This asymmetry of the coasting periods does not seemto have been clearly identified in the extant literature. Itis this asymmetry that can be used to resolve the twinparadox if the calculation is done according to twin A.However, if the calculation is done according to twin B,this asymmetry only exacerbates the twin paradox. Ifonly this asymmetry is taken into account, then B findsthat A should be even younger than what A finds B tobe. In the calculation according to B, the acceleratingperiods, especially the acceleration at the turn aroundpoint, play a crucial role to resolve the paradox.
In conclusion, the usual manner in which the twinparadox is evinced, that the coasting periods are all thatreally matter, and that they are symmetric therefore eachtwin should think that the other is equally younger, issimply not true.
3. Decelerating phase
The periods of deceleration, � and �, will be associatedto somewhat different hyperbolas, but the motion is quitesimilar. We will simply replace g ! �g in Eqns. (53)and (54). This gives
X =
✓X � 1
g
◆cosh(gT ) +
1
g(77)
T = �✓X � 1
g
◆sinh(gT ) . (78)
with corresponding hyperbola
✓X � 1
g
◆2
� T 2 =
✓X � 1
g
◆2
, (79)
which is also a family of hyperbolas parametrized by X.We realize that we are interested in the left branch ofthis set of hyperbolas, which is the decelerating branch.This requires that X 1
g which then imposes that X 1g . Because of this, the time T and T run in the same
direction, in Eqn.(78), �⇣X � 1
g
⌘is positive.
Simple deceleration is not enough, we want that thetrajectory of the decelerating observer to be defined byX = 0, to pass through the turn around point at the cor-rect spacetime point in the coordinates of A, (TD, XD) =(T0 + 2T 0, X0 + 2X 0) when T = TD (the value of TD isactually not required for our analysis, it can of course bedetermined as the sum of the lapse of coordinate time ofB for the accelerating phase, the coasting phase and the
decelerating phase). Thus we shift the hyperbola as
X �XD =
✓X � 1
g
◆cosh(g
⇣T � TD
⌘) +
1
g(80)
T � TD = �✓X � 1
g
◆sinh(g
⇣T � TD
⌘) . (81)
This is now a hyperbola that passes through X = XD +X = X0 + 2X 0 + X and and T = TD = T0 + 2T 0 whenT = TD. Clearly
✓X �XD � 1
g
◆2
� (T � TD)2 =
✓X � 1
g
◆2
(82)
which is the equation of a family of hyperbolas,parametrized by X, symmetric about
⇣TD, XD + 1
g
⌘.
We choose the left branch (decelerating) by imposing thatX 1
g . As mentioned above, the hyperbola for X = 0
corresponds to the trajectory of twin B and at T = TD,twin B will be at the turn around point (XD, TD) in thecoordinate system of twin A.
It is easy to check that the metric in these coordinatesfor the decelerating phase is exactly as before except g !�g
d⌧2 =⇣1� gX
⌘2dT 2 � dX2. (83)
To compute the elapsed proper time for twin B duringthe decelerating phase, we should integrate T from TD �T 0 ! TD where T 0 is defined as the lapse of coordinatetime of B during the accelerating phase, during whichthe coordinate time of A increases from 0 to T 0. Thenfrom Eqn.(64), we have
T 0 =1
garcsinh (gT 0) . (84)
It is clear that to decelerate from V to 0 will take thesame amount of coordinate time for B as to acceleratefrom 0 to V . As the position of B is at X = 0, thelapse of coordinate time of B according to B during thedecelerating phase is simply equal to the lapse of propertime of B according to B and hence �⌧B,�(B) = T 0 =1g arcsinh (gT
0).
D. Elapsed proper time of B according to B
To compute the elapsed proper time of B according toB is very easy since according to B, B stays put at X = 0for the entire journey. For accelerating and deceleratingparts of the trajectory ↵ and for �, we have already cal-culated the elapsed proper time, from Eqn.(64) and fromEqn.(84) we have
�⌧B,↵ = �⌧B,� = T 0 =1
garcsinh (gT 0) . (85)

• The turn around point is given by:
• and the hyperbola describing the trajectory is given by:
• The metric is now given by:
• Putting in the coordinate transformation gives the trajectory of A according to B:
10
turn around point is. There is a physical difference be-tween the two twins, A just stays put and is always in aninertial reference frame in which the turn around point isalso at rest. B moves and we know that B moves becausehe or she suffers acceleration. This same turn aroundpoint approaches B at velocity �V but is only a distanceL/�V away, according to B.
This asymmetry of the coasting periods does not seemto have been clearly identified in the extant literature. Itis this asymmetry that can be used to resolve the twinparadox if the calculation is done according to twin A.However, if the calculation is done according to twin B,this asymmetry only exacerbates the twin paradox. Ifonly this asymmetry is taken into account, then B findsthat A should be even younger than what A finds B tobe. In the calculation according to B, the acceleratingperiods, especially the acceleration at the turn aroundpoint, play a crucial role to resolve the paradox.
In conclusion, the usual manner in which the twinparadox is evinced, that the coasting periods are all thatreally matter, and that they are symmetric therefore eachtwin should think that the other is equally younger, issimply not true.
3. Decelerating phase
The periods of deceleration, � and �, will be associatedto somewhat different hyperbolas, but the motion is quitesimilar. We will simply replace g ! �g in Eqns. (53)and (54). This gives
X =
✓X � 1
g
◆cosh(gT ) +
1
g(77)
T = �✓X � 1
g
◆sinh(gT ) . (78)
with corresponding hyperbola
✓X � 1
g
◆2
� T 2 =
✓X � 1
g
◆2
, (79)
which is also a family of hyperbolas parametrized by X.We realize that we are interested in the left branch ofthis set of hyperbolas, which is the decelerating branch.This requires that X 1
g which then imposes that X 1g . Because of this, the time T and T run in the same
direction, in Eqn.(78), �⇣X � 1
g
⌘is positive.
Simple deceleration is not enough, we want that thetrajectory of the decelerating observer to be defined byX = 0, to pass through the turn around point at the cor-rect spacetime point in the coordinates of A, (TD, XD) =(T0 + 2T 0, X0 + 2X 0) when T = TD (the value of TD isactually not required for our analysis, it can of course bedetermined as the sum of the lapse of coordinate time ofB for the accelerating phase, the coasting phase and the
decelerating phase). Thus we shift the hyperbola as
X �XD =
✓X � 1
g
◆cosh(g
⇣T � TD
⌘) +
1
g(80)
T � TD = �✓X � 1
g
◆sinh(g
⇣T � TD
⌘) . (81)
This is now a hyperbola that passes through X = XD +X = X0 + 2X 0 + X and and T = TD = T0 + 2T 0 whenT = TD. Clearly
✓X �XD � 1
g
◆2
� (T � TD)2 =
✓X � 1
g
◆2
(82)
which is the equation of a family of hyperbolas,parametrized by X, symmetric about
⇣TD, XD + 1
g
⌘.
We choose the left branch (decelerating) by imposing thatX 1
g . As mentioned above, the hyperbola for X = 0
corresponds to the trajectory of twin B and at T = TD,twin B will be at the turn around point (XD, TD) in thecoordinate system of twin A.
It is easy to check that the metric in these coordinatesfor the decelerating phase is exactly as before except g !�g
d⌧2 =⇣1� gX
⌘2dT 2 � dX2. (83)
To compute the elapsed proper time for twin B duringthe decelerating phase, we should integrate T from TD �T 0 ! TD where T 0 is defined as the lapse of coordinatetime of B during the accelerating phase, during whichthe coordinate time of A increases from 0 to T 0. Thenfrom Eqn.(64), we have
T 0 =1
garcsinh (gT 0) . (84)
It is clear that to decelerate from V to 0 will take thesame amount of coordinate time for B as to acceleratefrom 0 to V . As the position of B is at X = 0, thelapse of coordinate time of B according to B during thedecelerating phase is simply equal to the lapse of propertime of B according to B and hence �⌧B,�(B) = T 0 =1g arcsinh (gT
0).
D. Elapsed proper time of B according to B
To compute the elapsed proper time of B according toB is very easy since according to B, B stays put at X = 0for the entire journey. For accelerating and deceleratingparts of the trajectory ↵ and for �, we have already cal-culated the elapsed proper time, from Eqn.(64) and fromEqn.(84) we have
�⌧B,↵ = �⌧B,� = T 0 =1
garcsinh (gT 0) . (85)
10
turn around point is. There is a physical difference be-tween the two twins, A just stays put and is always in aninertial reference frame in which the turn around point isalso at rest. B moves and we know that B moves becausehe or she suffers acceleration. This same turn aroundpoint approaches B at velocity �V but is only a distanceL/�V away, according to B.
This asymmetry of the coasting periods does not seemto have been clearly identified in the extant literature. Itis this asymmetry that can be used to resolve the twinparadox if the calculation is done according to twin A.However, if the calculation is done according to twin B,this asymmetry only exacerbates the twin paradox. Ifonly this asymmetry is taken into account, then B findsthat A should be even younger than what A finds B tobe. In the calculation according to B, the acceleratingperiods, especially the acceleration at the turn aroundpoint, play a crucial role to resolve the paradox.
In conclusion, the usual manner in which the twinparadox is evinced, that the coasting periods are all thatreally matter, and that they are symmetric therefore eachtwin should think that the other is equally younger, issimply not true.
3. Decelerating phase
The periods of deceleration, � and �, will be associatedto somewhat different hyperbolas, but the motion is quitesimilar. We will simply replace g ! �g in Eqns. (53)and (54). This gives
X =
✓X � 1
g
◆cosh(gT ) +
1
g(77)
T = �✓X � 1
g
◆sinh(gT ) . (78)
with corresponding hyperbola
✓X � 1
g
◆2
� T 2 =
✓X � 1
g
◆2
, (79)
which is also a family of hyperbolas parametrized by X.We realize that we are interested in the left branch ofthis set of hyperbolas, which is the decelerating branch.This requires that X 1
g which then imposes that X 1g . Because of this, the time T and T run in the same
direction, in Eqn.(78), �⇣X � 1
g
⌘is positive.
Simple deceleration is not enough, we want that thetrajectory of the decelerating observer to be defined byX = 0, to pass through the turn around point at the cor-rect spacetime point in the coordinates of A, (TD, XD) =(T0 + 2T 0, X0 + 2X 0) when T = TD (the value of TD isactually not required for our analysis, it can of course bedetermined as the sum of the lapse of coordinate time ofB for the accelerating phase, the coasting phase and the
decelerating phase). Thus we shift the hyperbola as
X �XD =
✓X � 1
g
◆cosh(g
⇣T � TD
⌘) +
1
g(80)
T � TD = �✓X � 1
g
◆sinh(g
⇣T � TD
⌘) . (81)
This is now a hyperbola that passes through X = XD +X = X0 + 2X 0 + X and and T = TD = T0 + 2T 0 whenT = TD. Clearly
✓X �XD � 1
g
◆2
� (T � TD)2 =
✓X � 1
g
◆2
(82)
which is the equation of a family of hyperbolas,parametrized by X, symmetric about
⇣TD, XD + 1
g
⌘.
We choose the left branch (decelerating) by imposing thatX 1
g . As mentioned above, the hyperbola for X = 0
corresponds to the trajectory of twin B and at T = TD,twin B will be at the turn around point (XD, TD) in thecoordinate system of twin A.
It is easy to check that the metric in these coordinatesfor the decelerating phase is exactly as before except g !�g
d⌧2 =⇣1� gX
⌘2dT 2 � dX2. (83)
To compute the elapsed proper time for twin B duringthe decelerating phase, we should integrate T from TD �T 0 ! TD where T 0 is defined as the lapse of coordinatetime of B during the accelerating phase, during whichthe coordinate time of A increases from 0 to T 0. Thenfrom Eqn.(64), we have
T 0 =1
garcsinh (gT 0) . (84)
It is clear that to decelerate from V to 0 will take thesame amount of coordinate time for B as to acceleratefrom 0 to V . As the position of B is at X = 0, thelapse of coordinate time of B according to B during thedecelerating phase is simply equal to the lapse of propertime of B according to B and hence �⌧B,�(B) = T 0 =1g arcsinh (gT
0).
D. Elapsed proper time of B according to B
To compute the elapsed proper time of B according toB is very easy since according to B, B stays put at X = 0for the entire journey. For accelerating and deceleratingparts of the trajectory ↵ and for �, we have already cal-culated the elapsed proper time, from Eqn.(64) and fromEqn.(84) we have
�⌧B,↵ = �⌧B,� = T 0 =1
garcsinh (gT 0) . (85)
10
turn around point is. There is a physical difference be-tween the two twins, A just stays put and is always in aninertial reference frame in which the turn around point isalso at rest. B moves and we know that B moves becausehe or she suffers acceleration. This same turn aroundpoint approaches B at velocity �V but is only a distanceL/�V away, according to B.
This asymmetry of the coasting periods does not seemto have been clearly identified in the extant literature. Itis this asymmetry that can be used to resolve the twinparadox if the calculation is done according to twin A.However, if the calculation is done according to twin B,this asymmetry only exacerbates the twin paradox. Ifonly this asymmetry is taken into account, then B findsthat A should be even younger than what A finds B tobe. In the calculation according to B, the acceleratingperiods, especially the acceleration at the turn aroundpoint, play a crucial role to resolve the paradox.
In conclusion, the usual manner in which the twinparadox is evinced, that the coasting periods are all thatreally matter, and that they are symmetric therefore eachtwin should think that the other is equally younger, issimply not true.
3. Decelerating phase
The periods of deceleration, � and �, will be associatedto somewhat different hyperbolas, but the motion is quitesimilar. We will simply replace g ! �g in Eqns. (53)and (54). This gives
X =
✓X � 1
g
◆cosh(gT ) +
1
g(77)
T = �✓X � 1
g
◆sinh(gT ) . (78)
with corresponding hyperbola
✓X � 1
g
◆2
� T 2 =
✓X � 1
g
◆2
, (79)
which is also a family of hyperbolas parametrized by X.We realize that we are interested in the left branch ofthis set of hyperbolas, which is the decelerating branch.This requires that X 1
g which then imposes that X 1g . Because of this, the time T and T run in the same
direction, in Eqn.(78), �⇣X � 1
g
⌘is positive.
Simple deceleration is not enough, we want that thetrajectory of the decelerating observer to be defined byX = 0, to pass through the turn around point at the cor-rect spacetime point in the coordinates of A, (TD, XD) =(T0 + 2T 0, X0 + 2X 0) when T = TD (the value of TD isactually not required for our analysis, it can of course bedetermined as the sum of the lapse of coordinate time ofB for the accelerating phase, the coasting phase and the
decelerating phase). Thus we shift the hyperbola as
X �XD =
✓X � 1
g
◆cosh(g
⇣T � TD
⌘) +
1
g(80)
T � TD = �✓X � 1
g
◆sinh(g
⇣T � TD
⌘) . (81)
This is now a hyperbola that passes through X = XD +X = X0 + 2X 0 + X and and T = TD = T0 + 2T 0 whenT = TD. Clearly
✓X �XD � 1
g
◆2
� (T � TD)2 =
✓X � 1
g
◆2
(82)
which is the equation of a family of hyperbolas,parametrized by X, symmetric about
⇣TD, XD + 1
g
⌘.
We choose the left branch (decelerating) by imposing thatX 1
g . As mentioned above, the hyperbola for X = 0
corresponds to the trajectory of twin B and at T = TD,twin B will be at the turn around point (XD, TD) in thecoordinate system of twin A.
It is easy to check that the metric in these coordinatesfor the decelerating phase is exactly as before except g !�g
d⌧2 =⇣1� gX
⌘2dT 2 � dX2. (83)
To compute the elapsed proper time for twin B duringthe decelerating phase, we should integrate T from TD �T 0 ! TD where T 0 is defined as the lapse of coordinatetime of B during the accelerating phase, during whichthe coordinate time of A increases from 0 to T 0. Thenfrom Eqn.(64), we have
T 0 =1
garcsinh (gT 0) . (84)
It is clear that to decelerate from V to 0 will take thesame amount of coordinate time for B as to acceleratefrom 0 to V . As the position of B is at X = 0, thelapse of coordinate time of B according to B during thedecelerating phase is simply equal to the lapse of propertime of B according to B and hence �⌧B,�(B) = T 0 =1g arcsinh (gT
0).
D. Elapsed proper time of B according to B
To compute the elapsed proper time of B according toB is very easy since according to B, B stays put at X = 0for the entire journey. For accelerating and deceleratingparts of the trajectory ↵ and for �, we have already cal-culated the elapsed proper time, from Eqn.(64) and fromEqn.(84) we have
�⌧B,↵ = �⌧B,� = T 0 =1
garcsinh (gT 0) . (85)
10
turn around point is. There is a physical difference be-tween the two twins, A just stays put and is always in aninertial reference frame in which the turn around point isalso at rest. B moves and we know that B moves becausehe or she suffers acceleration. This same turn aroundpoint approaches B at velocity �V but is only a distanceL/�V away, according to B.
This asymmetry of the coasting periods does not seemto have been clearly identified in the extant literature. Itis this asymmetry that can be used to resolve the twinparadox if the calculation is done according to twin A.However, if the calculation is done according to twin B,this asymmetry only exacerbates the twin paradox. Ifonly this asymmetry is taken into account, then B findsthat A should be even younger than what A finds B tobe. In the calculation according to B, the acceleratingperiods, especially the acceleration at the turn aroundpoint, play a crucial role to resolve the paradox.
In conclusion, the usual manner in which the twinparadox is evinced, that the coasting periods are all thatreally matter, and that they are symmetric therefore eachtwin should think that the other is equally younger, issimply not true.
3. Decelerating phase
The periods of deceleration, � and �, will be associatedto somewhat different hyperbolas, but the motion is quitesimilar. We will simply replace g ! �g in Eqns. (53)and (54). This gives
X =
✓X � 1
g
◆cosh(gT ) +
1
g(77)
T = �✓X � 1
g
◆sinh(gT ) . (78)
with corresponding hyperbola
✓X � 1
g
◆2
� T 2 =
✓X � 1
g
◆2
, (79)
which is also a family of hyperbolas parametrized by X.We realize that we are interested in the left branch ofthis set of hyperbolas, which is the decelerating branch.This requires that X 1
g which then imposes that X 1g . Because of this, the time T and T run in the same
direction, in Eqn.(78), �⇣X � 1
g
⌘is positive.
Simple deceleration is not enough, we want that thetrajectory of the decelerating observer to be defined byX = 0, to pass through the turn around point at the cor-rect spacetime point in the coordinates of A, (TD, XD) =(T0 + 2T 0, X0 + 2X 0) when T = TD (the value of TD isactually not required for our analysis, it can of course bedetermined as the sum of the lapse of coordinate time ofB for the accelerating phase, the coasting phase and the
decelerating phase). Thus we shift the hyperbola as
X �XD =
✓X � 1
g
◆cosh(g
⇣T � TD
⌘) +
1
g(80)
T � TD = �✓X � 1
g
◆sinh(g
⇣T � TD
⌘) . (81)
This is now a hyperbola that passes through X = XD +X = X0 + 2X 0 + X and and T = TD = T0 + 2T 0 whenT = TD. Clearly
✓X �XD � 1
g
◆2
� (T � TD)2 =
✓X � 1
g
◆2
(82)
which is the equation of a family of hyperbolas,parametrized by X, symmetric about
⇣TD, XD + 1
g
⌘.
We choose the left branch (decelerating) by imposing thatX 1
g . As mentioned above, the hyperbola for X = 0
corresponds to the trajectory of twin B and at T = TD,twin B will be at the turn around point (XD, TD) in thecoordinate system of twin A.
It is easy to check that the metric in these coordinatesfor the decelerating phase is exactly as before except g !�g
d⌧2 =⇣1� gX
⌘2dT 2 � dX2. (83)
To compute the elapsed proper time for twin B duringthe decelerating phase, we should integrate T from TD �T 0 ! TD where T 0 is defined as the lapse of coordinatetime of B during the accelerating phase, during whichthe coordinate time of A increases from 0 to T 0. Thenfrom Eqn.(64), we have
T 0 =1
garcsinh (gT 0) . (84)
It is clear that to decelerate from V to 0 will take thesame amount of coordinate time for B as to acceleratefrom 0 to V . As the position of B is at X = 0, thelapse of coordinate time of B according to B during thedecelerating phase is simply equal to the lapse of propertime of B according to B and hence �⌧B,�(B) = T 0 =1g arcsinh (gT
0).
D. Elapsed proper time of B according to B
To compute the elapsed proper time of B according toB is very easy since according to B, B stays put at X = 0for the entire journey. For accelerating and deceleratingparts of the trajectory ↵ and for �, we have already cal-culated the elapsed proper time, from Eqn.(64) and fromEqn.(84) we have
�⌧B,↵ = �⌧B,� = T 0 =1
garcsinh (gT 0) . (85)
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) =
T0�V
. The deceleratingphase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)

• Then replacing this in the metric gives:
• Integrating from to gives:
• Then we can put everything together to find:
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) =
T0�V
. The deceleratingphase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
12
smaller velocity. When B stops accelerating, discontin-uously or in reality, rather brusquely, he or she quicklyadopts the inertial coordinate system of Eqn.(74) and(75). Physically, this change of coordinate system mustoccur continuously, however it is normally the case thatit occurs rather fast. Treating it as if it is a discontinuouschange of coordinate system, then there is a discontinu-ous change of the velocity from VA(B) ! �V . It is under-stood that the 4-velocity of A, dXµ
Ad⌧A(B) , in the accelerating
Kottler-Rindler coordinate system of B just before theacceleration stops and in the inertial Lorentz coordinatesystem just after the acceleration stops, is related by thestandard tensorial relation between 4-vectors in differentcoordinates systems, to the 4-velocity of A in the coordi-nate system of A which is always (1, 0, 0, 0) (adding in theY and Z coordinates). Thus, any discontinuity is solelydue to a discontinuous change of coordinate system.
The metric for the Kottler-Rindler coordinates is givenby Eqn.(72)
d⌧2 =⇣1 + gX
⌘2dT 2 � dX2 (98)
thus using Eqn.(94) for XA
d⌧A,↵(B) =
0
@⇣1 + gXA
⌘2� dXA
dTA
!21
A1/2
dTA
=⇣sech2(gTA)� tanh2(gTA) sech
2(gTA)⌘1/2
dTA
= sech2(gTA)dTA. (99)
This integrates trivially and gives, using the relationEqn.(96),
�⌧A,↵(B) =
Z TB
0sech2(gTA)dTA =
1
gtanh(gTB)
=1
g
sinh(gTB)
cosh(gTB)=
T 0
(1 + (gT 0)2)1/2. (100)
Thus the elapsed proper time of A according to B dur-ing the accelerating phase ↵ is less than what A wouldcalculate, T 0.
2. Coasting phase
During the coasting phase, as we have already ascer-tained, the lapse of coordinate time for twin B is givenby Eqn.(87)
T0 =T0
�V. (101)
During this lapse of coordinate time of B, twin A movesfrom X = �X 0 to
X = �X 0 � T0V. (102)
The elapsed proper time is given by integrating
�⌧A(B) =
Z T 0+T0
T 0d⌧A(B) =
Z T 0+T0
T 0
�1� V 2
�1/2dT
=�1� V 2
�1/2T0 =
T0
�V. (103)
Replacing in for T0 we find
�⌧A(B) =T0
�2V
. (104)
As �V > 1 this is like a double whammy. During thecoasting period, the calculation of the proper time of Aaccording to B is even much smaller than the symmetriccalculation of the elapsed proper time of B according toA, as given in Eqn. (13), �⌧B(A) = T0
�V. The decelerating
phase must come to the rescue and give us back the true,full lapse of proper time of A.
3. Decelerating phase
Naively, we might think that the lapse of proper timein the accelerating phase and the decelerating phase forA according to B would be equal. But this is simply nottrue. It is the decelerating phase that makes up for allthe time lost that seems to be making A younger thanB.
Indeed, we compute the proper time in the samemanner for the decelerating phase as for the accelerat-ing phase, notice the metric in Eqn.(72) changes withg ! �g,
d⌧ =
0
@⇣1� gX
⌘2� dX
dT
!21
A1/2
dT (105)
and replacing X = 0 in Eqn.(80) yields XA
XA = �✓XD +
1
g
◆sech
⇣g(T � TD)
⌘+
1
g. (106)
Then we get, with a calculation very similar to that donefor Eqn.(99)
d⌧A�(B) =⇣(1 + gXD) sech2
⇣g(TA � TD)
⌘⌘dTA
(107)
and integrating from TD � T 0 to TD gives
�⌧A�(B) = (1 + gXD)1
gtanh
⇣gT 0⌘
= (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(108)
13
We note that �⌧A�(B) can be as large as required becauseof the additional term
g(X0 + 2X 0)T 0
(1 + (gT 0)2)1/2(109)
which compensates for the smaller lapse of proper timeof A according to B in the phases ↵ and �.
4. Proper time of A as calculated by B
Now finally we can put all the pieces together to get,since �⌧A(B) = (�⌧A↵(B) +�⌧A�(B) +�⌧A�(B))⇥ 2
�⌧A(B)/2 = �⌧A↵(B) +�⌧A�(B) +�⌧A�(B)
=T 0
(1 + (gT 0)2)1/2+
T0
�2V
+ (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(110)
Then using
V
g=
T 0
(1 + (gT 0)2)1/2(111)
X 0 =1
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆(112)
and X0 = V T0 we get
�⌧A(B)/2 =V
g+
�1� V 2
�T0 + (1 + gV T0)
V
g
+ 2V
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆
= T0 + 2⇣1 + (gT 0)
2⌘1/2 T 0
(1 + (gT 0)2)1/2
= T0 + 2T 0. (113)
Therefore we reproduce that the elapsed proper time ofA according to B is
�⌧A(B) = 2T0 + 4T 0 = �⌧A(A) (114)
and from Eqn.(90) and Eqn.(49), we have
�⌧B(B) = 2T0
�V+ 4
1
garcsinh (gT 0) = �⌧B(A) (115)
and of course
�⌧B(A) = �⌧B(B) < �⌧A(B) = �⌧A(A). (116)
In conclusion, the twin paradox is completely resolved,the sedentary twin A is older than the travelling twin Bafter the journey, and we have explicitly shown how to dothe calculation of the elapsed proper time of each twin,according to each twin.
IV. COMMENTS ON MAUDLIN’S ANALYSIS
A. Is acceleration crucial to the resolution of thetwin paradox?
Philosopher of physics T. Maudlin analyzed the twinparadox in his book Philosophy of Physics: Space andTime, [7]. Maudlin quotes Feynman at length from thebook [12] and maintains that everything in the explana-tion found there is wrong. Feynman is quoted as saying
So the way to state the rule is to say that theman who has felt the accelerations, who hasseen things fall against the walls, and so on,is the one who would be the younger; that isthe difference between them in an “absolute”sense, and it is certainly correct.
Maudlin proceeds to try to demonstrate that accelerationplays no role in explaining the end result. In his analysis,he notes that the lengths of the accelerating parts of B’sworldline can be made as small as possible, and so heargues that the accelerating periods play no significantrole in the resolution of the twin paradox, as depicted inFig.(2). As he says on page 83: “the issue is how longthe world-lines are, not how bent”.
FIG. 2: Infinite proper acceleration version of the twin para-dox
Let us first try to understand why considering the ac-celerating part of B’s journey is extremely important inunderstanding the original twin paradox. Maudlin’s ar-gument is that we can calculate the proper time of eachtwin in a single Lorentz frame, and that it will yield thecorrect result, thus nothing more needs to be said. Thesame calculation done in any Lorentz frame will also leadto the same conclusion: twin A must be older than twinB at the end of the journey. So one may conclude thatthere is no true paradox, the theory of special relativitydoes not lead to any contradictory results.
13
We note that �⌧A�(B) can be as large as required becauseof the additional term
g(X0 + 2X 0)T 0
(1 + (gT 0)2)1/2(109)
which compensates for the smaller lapse of proper timeof A according to B in the phases ↵ and �.
4. Proper time of A as calculated by B
Now finally we can put all the pieces together to get,since �⌧A(B) = (�⌧A↵(B) +�⌧A�(B) +�⌧A�(B))⇥ 2
�⌧A(B)/2 = �⌧A↵(B) +�⌧A�(B) +�⌧A�(B)
=T 0
(1 + (gT 0)2)1/2+
T0
�2V
+ (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(110)
Then using
V
g=
T 0
(1 + (gT 0)2)1/2(111)
X 0 =1
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆(112)
and X0 = V T0 we get
�⌧A(B)/2 =V
g+
�1� V 2
�T0 + (1 + gV T0)
V
g
+ 2V
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆
= T0 + 2⇣1 + (gT 0)
2⌘1/2 T 0
(1 + (gT 0)2)1/2
= T0 + 2T 0. (113)
Therefore we reproduce that the elapsed proper time ofA according to B is
�⌧A(B) = 2T0 + 4T 0 = �⌧A(A) (114)
and from Eqn.(90) and Eqn.(49), we have
�⌧B(B) = 2T0
�V+ 4
1
garcsinh (gT 0) = �⌧B(A) (115)
and of course
�⌧B(A) = �⌧B(B) < �⌧A(B) = �⌧A(A). (116)
In conclusion, the twin paradox is completely resolved,the sedentary twin A is older than the travelling twin Bafter the journey, and we have explicitly shown how to dothe calculation of the elapsed proper time of each twin,according to each twin.
IV. COMMENTS ON MAUDLIN’S ANALYSIS
A. Is acceleration crucial to the resolution of thetwin paradox?
Philosopher of physics T. Maudlin analyzed the twinparadox in his book Philosophy of Physics: Space andTime, [7]. Maudlin quotes Feynman at length from thebook [12] and maintains that everything in the explana-tion found there is wrong. Feynman is quoted as saying
So the way to state the rule is to say that theman who has felt the accelerations, who hasseen things fall against the walls, and so on,is the one who would be the younger; that isthe difference between them in an “absolute”sense, and it is certainly correct.
Maudlin proceeds to try to demonstrate that accelerationplays no role in explaining the end result. In his analysis,he notes that the lengths of the accelerating parts of B’sworldline can be made as small as possible, and so heargues that the accelerating periods play no significantrole in the resolution of the twin paradox, as depicted inFig.(2). As he says on page 83: “the issue is how longthe world-lines are, not how bent”.
FIG. 2: Infinite proper acceleration version of the twin para-dox
Let us first try to understand why considering the ac-celerating part of B’s journey is extremely important inunderstanding the original twin paradox. Maudlin’s ar-gument is that we can calculate the proper time of eachtwin in a single Lorentz frame, and that it will yield thecorrect result, thus nothing more needs to be said. Thesame calculation done in any Lorentz frame will also leadto the same conclusion: twin A must be older than twinB at the end of the journey. So one may conclude thatthere is no true paradox, the theory of special relativitydoes not lead to any contradictory results.
13
We note that �⌧A�(B) can be as large as required becauseof the additional term
g(X0 + 2X 0)T 0
(1 + (gT 0)2)1/2(109)
which compensates for the smaller lapse of proper timeof A according to B in the phases ↵ and �.
4. Proper time of A as calculated by B
Now finally we can put all the pieces together to get,since �⌧A(B) = (�⌧A↵(B) +�⌧A�(B) +�⌧A�(B))⇥ 2
�⌧A(B)/2 = �⌧A↵(B) +�⌧A�(B) +�⌧A�(B)
=T 0
(1 + (gT 0)2)1/2+
T0
�2V
+ (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(110)
Then using
V
g=
T 0
(1 + (gT 0)2)1/2(111)
X 0 =1
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆(112)
and X0 = V T0 we get
�⌧A(B)/2 =V
g+
�1� V 2
�T0 + (1 + gV T0)
V
g
+ 2V
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆
= T0 + 2⇣1 + (gT 0)
2⌘1/2 T 0
(1 + (gT 0)2)1/2
= T0 + 2T 0. (113)
Therefore we reproduce that the elapsed proper time ofA according to B is
�⌧A(B) = 2T0 + 4T 0 = �⌧A(A) (114)
and from Eqn.(90) and Eqn.(49), we have
�⌧B(B) = 2T0
�V+ 4
1
garcsinh (gT 0) = �⌧B(A) (115)
and of course
�⌧B(A) = �⌧B(B) < �⌧A(B) = �⌧A(A). (116)
In conclusion, the twin paradox is completely resolved,the sedentary twin A is older than the travelling twin Bafter the journey, and we have explicitly shown how to dothe calculation of the elapsed proper time of each twin,according to each twin.
IV. COMMENTS ON MAUDLIN’S ANALYSIS
A. Is acceleration crucial to the resolution of thetwin paradox?
Philosopher of physics T. Maudlin analyzed the twinparadox in his book Philosophy of Physics: Space andTime, [7]. Maudlin quotes Feynman at length from thebook [12] and maintains that everything in the explana-tion found there is wrong. Feynman is quoted as saying
So the way to state the rule is to say that theman who has felt the accelerations, who hasseen things fall against the walls, and so on,is the one who would be the younger; that isthe difference between them in an “absolute”sense, and it is certainly correct.
Maudlin proceeds to try to demonstrate that accelerationplays no role in explaining the end result. In his analysis,he notes that the lengths of the accelerating parts of B’sworldline can be made as small as possible, and so heargues that the accelerating periods play no significantrole in the resolution of the twin paradox, as depicted inFig.(2). As he says on page 83: “the issue is how longthe world-lines are, not how bent”.
FIG. 2: Infinite proper acceleration version of the twin para-dox
Let us first try to understand why considering the ac-celerating part of B’s journey is extremely important inunderstanding the original twin paradox. Maudlin’s ar-gument is that we can calculate the proper time of eachtwin in a single Lorentz frame, and that it will yield thecorrect result, thus nothing more needs to be said. Thesame calculation done in any Lorentz frame will also leadto the same conclusion: twin A must be older than twinB at the end of the journey. So one may conclude thatthere is no true paradox, the theory of special relativitydoes not lead to any contradictory results.

• Then using:
• We get exactly as required:
13
We note that �⌧A�(B) can be as large as required becauseof the additional term
g(X0 + 2X 0)T 0
(1 + (gT 0)2)1/2(109)
which compensates for the smaller lapse of proper timeof A according to B in the phases ↵ and �.
4. Proper time of A as calculated by B
Now finally we can put all the pieces together to get,since �⌧A(B) = (�⌧A↵(B) +�⌧A�(B) +�⌧A�(B))⇥ 2
�⌧A(B)/2 = �⌧A↵(B) +�⌧A�(B) +�⌧A�(B)
=T 0
(1 + (gT 0)2)1/2+
T0
�2V
+ (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(110)
Then using
V
g=
T 0
(1 + (gT 0)2)1/2(111)
X 0 =1
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆(112)
and X0 = V T0 we get
�⌧A(B)/2 =V
g+
�1� V 2
�T0 + (1 + gV T0)
V
g
+ 2V
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆
= T0 + 2⇣1 + (gT 0)
2⌘1/2 T 0
(1 + (gT 0)2)1/2
= T0 + 2T 0. (113)
Therefore we reproduce that the elapsed proper time ofA according to B is
�⌧A(B) = 2T0 + 4T 0 = �⌧A(A) (114)
and from Eqn.(90) and Eqn.(49), we have
�⌧B(B) = 2T0
�V+ 4
1
garcsinh (gT 0) = �⌧B(A) (115)
and of course
�⌧B(A) = �⌧B(B) < �⌧A(B) = �⌧A(A). (116)
In conclusion, the twin paradox is completely resolved,the sedentary twin A is older than the travelling twin Bafter the journey, and we have explicitly shown how to dothe calculation of the elapsed proper time of each twin,according to each twin.
IV. COMMENTS ON MAUDLIN’S ANALYSIS
A. Is acceleration crucial to the resolution of thetwin paradox?
Philosopher of physics T. Maudlin analyzed the twinparadox in his book Philosophy of Physics: Space andTime, [7]. Maudlin quotes Feynman at length from thebook [12] and maintains that everything in the explana-tion found there is wrong. Feynman is quoted as saying
So the way to state the rule is to say that theman who has felt the accelerations, who hasseen things fall against the walls, and so on,is the one who would be the younger; that isthe difference between them in an “absolute”sense, and it is certainly correct.
Maudlin proceeds to try to demonstrate that accelerationplays no role in explaining the end result. In his analysis,he notes that the lengths of the accelerating parts of B’sworldline can be made as small as possible, and so heargues that the accelerating periods play no significantrole in the resolution of the twin paradox, as depicted inFig.(2). As he says on page 83: “the issue is how longthe world-lines are, not how bent”.
FIG. 2: Infinite proper acceleration version of the twin para-dox
Let us first try to understand why considering the ac-celerating part of B’s journey is extremely important inunderstanding the original twin paradox. Maudlin’s ar-gument is that we can calculate the proper time of eachtwin in a single Lorentz frame, and that it will yield thecorrect result, thus nothing more needs to be said. Thesame calculation done in any Lorentz frame will also leadto the same conclusion: twin A must be older than twinB at the end of the journey. So one may conclude thatthere is no true paradox, the theory of special relativitydoes not lead to any contradictory results.
13
We note that �⌧A�(B) can be as large as required becauseof the additional term
g(X0 + 2X 0)T 0
(1 + (gT 0)2)1/2(109)
which compensates for the smaller lapse of proper timeof A according to B in the phases ↵ and �.
4. Proper time of A as calculated by B
Now finally we can put all the pieces together to get,since �⌧A(B) = (�⌧A↵(B) +�⌧A�(B) +�⌧A�(B))⇥ 2
�⌧A(B)/2 = �⌧A↵(B) +�⌧A�(B) +�⌧A�(B)
=T 0
(1 + (gT 0)2)1/2+
T0
�2V
+ (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(110)
Then using
V
g=
T 0
(1 + (gT 0)2)1/2(111)
X 0 =1
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆(112)
and X0 = V T0 we get
�⌧A(B)/2 =V
g+
�1� V 2
�T0 + (1 + gV T0)
V
g
+ 2V
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆
= T0 + 2⇣1 + (gT 0)
2⌘1/2 T 0
(1 + (gT 0)2)1/2
= T0 + 2T 0. (113)
Therefore we reproduce that the elapsed proper time ofA according to B is
�⌧A(B) = 2T0 + 4T 0 = �⌧A(A) (114)
and from Eqn.(90) and Eqn.(49), we have
�⌧B(B) = 2T0
�V+ 4
1
garcsinh (gT 0) = �⌧B(A) (115)
and of course
�⌧B(A) = �⌧B(B) < �⌧A(B) = �⌧A(A). (116)
In conclusion, the twin paradox is completely resolved,the sedentary twin A is older than the travelling twin Bafter the journey, and we have explicitly shown how to dothe calculation of the elapsed proper time of each twin,according to each twin.
IV. COMMENTS ON MAUDLIN’S ANALYSIS
A. Is acceleration crucial to the resolution of thetwin paradox?
Philosopher of physics T. Maudlin analyzed the twinparadox in his book Philosophy of Physics: Space andTime, [7]. Maudlin quotes Feynman at length from thebook [12] and maintains that everything in the explana-tion found there is wrong. Feynman is quoted as saying
So the way to state the rule is to say that theman who has felt the accelerations, who hasseen things fall against the walls, and so on,is the one who would be the younger; that isthe difference between them in an “absolute”sense, and it is certainly correct.
Maudlin proceeds to try to demonstrate that accelerationplays no role in explaining the end result. In his analysis,he notes that the lengths of the accelerating parts of B’sworldline can be made as small as possible, and so heargues that the accelerating periods play no significantrole in the resolution of the twin paradox, as depicted inFig.(2). As he says on page 83: “the issue is how longthe world-lines are, not how bent”.
FIG. 2: Infinite proper acceleration version of the twin para-dox
Let us first try to understand why considering the ac-celerating part of B’s journey is extremely important inunderstanding the original twin paradox. Maudlin’s ar-gument is that we can calculate the proper time of eachtwin in a single Lorentz frame, and that it will yield thecorrect result, thus nothing more needs to be said. Thesame calculation done in any Lorentz frame will also leadto the same conclusion: twin A must be older than twinB at the end of the journey. So one may conclude thatthere is no true paradox, the theory of special relativitydoes not lead to any contradictory results.
13
We note that �⌧A�(B) can be as large as required becauseof the additional term
g(X0 + 2X 0)T 0
(1 + (gT 0)2)1/2(109)
which compensates for the smaller lapse of proper timeof A according to B in the phases ↵ and �.
4. Proper time of A as calculated by B
Now finally we can put all the pieces together to get,since �⌧A(B) = (�⌧A↵(B) +�⌧A�(B) +�⌧A�(B))⇥ 2
�⌧A(B)/2 = �⌧A↵(B) +�⌧A�(B) +�⌧A�(B)
=T 0
(1 + (gT 0)2)1/2+
T0
�2V
+ (1 + g(X0 + 2X 0))T 0
(1 + (gT 0)2)1/2.
(110)
Then using
V
g=
T 0
(1 + (gT 0)2)1/2(111)
X 0 =1
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆(112)
and X0 = V T0 we get
�⌧A(B)/2 =V
g+
�1� V 2
�T0 + (1 + gV T0)
V
g
+ 2V
g
✓⇣1 + (gT 0)
2⌘1/2
� 1
◆
= T0 + 2⇣1 + (gT 0)
2⌘1/2 T 0
(1 + (gT 0)2)1/2
= T0 + 2T 0. (113)
Therefore we reproduce that the elapsed proper time ofA according to B is
�⌧A(B) = 2T0 + 4T 0 = �⌧A(A) (114)
and from Eqn.(90) and Eqn.(49), we have
�⌧B(B) = 2T0
�V+ 4
1
garcsinh (gT 0) = �⌧B(A) (115)
and of course
�⌧B(A) = �⌧B(B) < �⌧A(B) = �⌧A(A). (116)
In conclusion, the twin paradox is completely resolved,the sedentary twin A is older than the travelling twin Bafter the journey, and we have explicitly shown how to dothe calculation of the elapsed proper time of each twin,according to each twin.
IV. COMMENTS ON MAUDLIN’S ANALYSIS
A. Is acceleration crucial to the resolution of thetwin paradox?
Philosopher of physics T. Maudlin analyzed the twinparadox in his book Philosophy of Physics: Space andTime, [7]. Maudlin quotes Feynman at length from thebook [12] and maintains that everything in the explana-tion found there is wrong. Feynman is quoted as saying
So the way to state the rule is to say that theman who has felt the accelerations, who hasseen things fall against the walls, and so on,is the one who would be the younger; that isthe difference between them in an “absolute”sense, and it is certainly correct.
Maudlin proceeds to try to demonstrate that accelerationplays no role in explaining the end result. In his analysis,he notes that the lengths of the accelerating parts of B’sworldline can be made as small as possible, and so heargues that the accelerating periods play no significantrole in the resolution of the twin paradox, as depicted inFig.(2). As he says on page 83: “the issue is how longthe world-lines are, not how bent”.
FIG. 2: Infinite proper acceleration version of the twin para-dox
Let us first try to understand why considering the ac-celerating part of B’s journey is extremely important inunderstanding the original twin paradox. Maudlin’s ar-gument is that we can calculate the proper time of eachtwin in a single Lorentz frame, and that it will yield thecorrect result, thus nothing more needs to be said. Thesame calculation done in any Lorentz frame will also leadto the same conclusion: twin A must be older than twinB at the end of the journey. So one may conclude thatthere is no true paradox, the theory of special relativitydoes not lead to any contradictory results.

Conclusions
• Feynman is right. • Maudlin is wrong. • Philosophers should stick to their subject.

Conclusions• The symmetry between the twins is broken by choosing the turn
around point to be at rest in twin A’s reference frame. • The calculation and resolution of the paradox done in A’s
reference frame does not require analysis of the accelerating periods if these are relatively short, and if one (correctly) subscribes to the understanding that the calculation of the elapsed proper time is independent of the coordinate system. However that understanding does not explain why one might think that the situation could be paradoxical.
• Then to definitively resolve the paradox one should show in detail that B would get the same answer as A.
• Role of acceleration is crucial in doing the calculation of the elapsed proper time according to B for both twins.
• Acceleration serves to label the twin that actually takes the journey.