
Traitement Numérique du Signal (Partie...
106
EII2 Traitement Numérique du Signal (Partie 2) Support de cours Olivier SENTIEYS [email protected] http://r2d2.enssat.fr/enseignements/Tns/Tns.php
-
Upload
dinhnguyet -
Category
Documents
-
view
225 -
download
0
Transcript of Traitement Numérique du Signal (Partie...

EII2
Traitement Numérique du Signal
(Partie 2)
Support de cours
Olivier [email protected]
http://r2d2.enssat.fr/enseignements/Tns/Tns.php

2
Plan du cours Partie II
IV. Analyse des filtres numériques 1. Spécification, classification, représentation
2. Analyse fréquentielle
3. Structures des filtres RII et RIF
V. Transformées en TNS 1. TFD, convolution linéaire
2. TFR : Transformée de Fourier Rapide
VI. Quantification - évaluation de la précision 1. Quantification
2. Effets de la quantification en TNS
3
Plan du cours Partie II (suite)
VII. Synthèse des filtres numériques RII 1. Invariance Impulsionnelle
2. Transformation Bilinéaire
VIII. Synthèse des filtres numériques RIF 1. Introduction
2. Filtres à Phase Linéaire
3. Méthode du Fenêtrage
4. Échantillonnage en Fréquence

4
Plan du cours (fin)
IX. Analyse spectrale 1. Effets de la troncature
2. Caractéristiques des fenêtres
3. Influence sur l'analyse
X. Systèmes multi-cadences1. Définition
2. Décimation
3. Interpolation
5
IV. Analyse des filtres numériques
1. Spécification, classification, représentation
2. Analyse fréquentielle
3. Structures des filtres RII et RIF

Notes :
6
Définition – Système Linéaire Discret (SLD) modifiant la représentation
temporelle et fréquentielle de signaux
1. IntroductionUn filtre numérique peut être représenté par :
– une fonction de transfert en z : H(z) = Y(z) / X(z)
Filtre Numérique
x(n) <=> X(z)y(n) <=> Y(z)
h(n) <=> H(z)
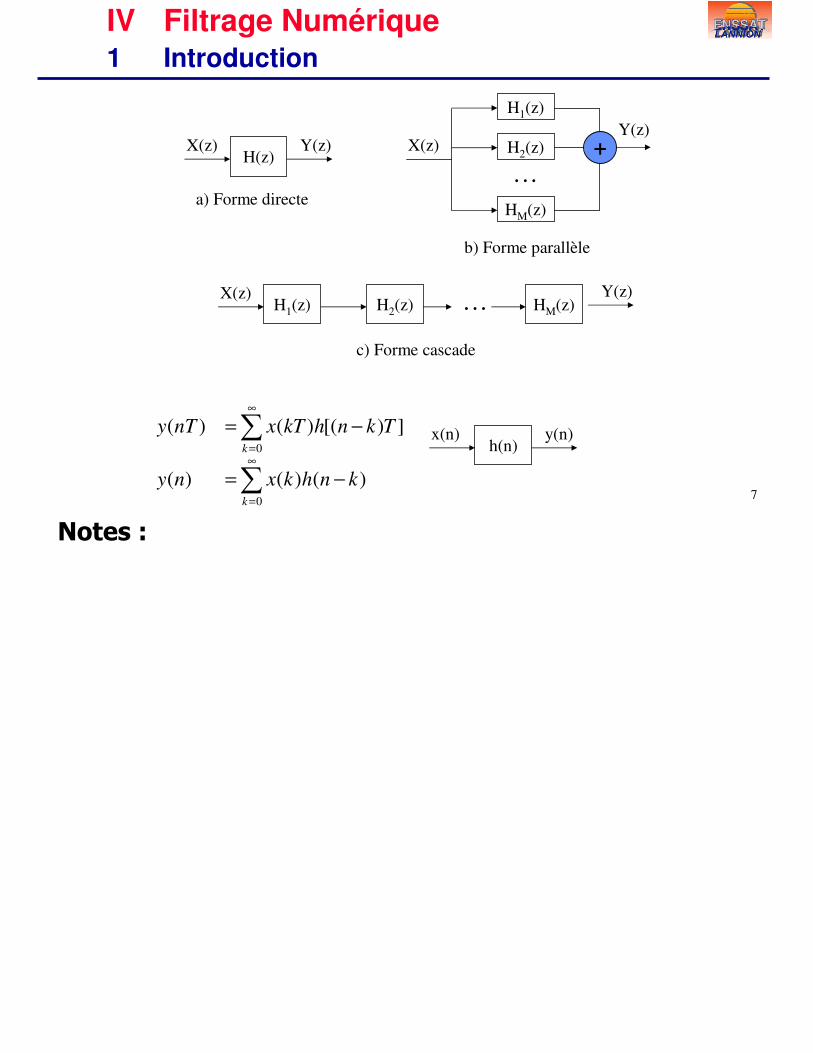
IV Filtrage Numérique1 Introduction
H(z)X(z) Y(z)
Notes :
7
H(z)X(z) Y(z)
a) Forme directe
H1(z)
X(z)Y(z)
b) Forme parallèle
H2(z)
HM(z)
. . .
H1(z)X(z) Y(z)
c) Forme cascade
H2(z) HM(z). . .
IV Filtrage Numérique1 Introduction
h(n)x(n) y(n)
∑
∑∞
=
∞
=
−=
−=
0
0
)()()(
])[()()(
k
k
knhkxny
TknhkTxnTy
+

Notes :
8
IV Filtrage Numérique1 Introduction
si x(n) = δ(n) alors y(n) = h(n)
– une équation aux différences (récursive ou non récursive)
∑∑==
−−−=N
i
i
M
i
i inyainxbny10
)(.)(.)(

Notes :
9
IV Filtrage Numérique2 Spécification d’un filtre numérique
2. Spécification d’un filtre numérique
– Gabarit fréquentiel
Passe-Bas (ou Passe-Haut) défini par sa sélectivité, son ondulation
en BP et son atténuation en BA
fFe/2fp
1
|H(f)|
1-δ1
1+δ1
δ2
fa
f
fp
0 dB
|H(f)| (dB)
20log(1-δ1)
20log(1+δ1)
20logδ2
fa
a) Gabarit fréquentiel linéaire b) Gabarit fréquentiel en dB
Bande passanteBande de transition
Bande atténuée

Notes :
10
IV Filtrage Numérique2 Spécification d’un filtre numérique
Passe-Bande (ou Réjecteur de Bande) défini par sa fréquence
centrale, sa sélectivité, son ondulation en BP et son atténuation
en BA
ffe/2fp+
1
|H(f)|
1-δ1
1+δ1
δ2
fa+fa- fp-

Notes :
11
IV Filtrage Numérique3 Classification des filtres numériques
3 Classification des filtres numériques
Un filtre numérique peut être classé selon :
– la durée de sa réponse impulsionnellefinie : les filtres RIF ont leur réponse impulsionnelle à support fini
i.e. h(n) = 0 pour n<0 et n>N
infinie : les filtres RII ont leur réponse impulsionnelle à support infini
i.e. h(n) ≠ 0 ∀n
– le type de représentation temporellerécursifs : la sortie y(n) dépend de l’entrée courante, des entrées précédentes et
des sorties précédentes
non récursifs : la sortie y(n) ne dépend que de l’entrée courante et des entrées
précédentes

Notes :
12
IV Filtrage Numérique3.1 Filtres numériques non récursifs
3.1 Filtres numériques non récursifs(ou transversaux)
Les coefficients bn du filtre sont les valeurs de la RI (h(n) = bn). Ceci
montre qu'un filtre non récursif est à Réponse Impulsionnelle
Finie (RIF).
M est appelée la longueur du filtre.
)()(
)()(
)()()(
)()(
0
00
0
inbnh
znhzbzH
zXzHzY
inxbny
M
i
i
M
n
nM
i
i
i
M
i
i
−=⇒
==⇒
=
−=
∑
∑∑
∑
=
=
−
=
−
=
δ

Notes :
13
IV Filtrage Numérique3.1 Filtres numériques non récursifs
• Principales propriétés
– Les RIF sont toujours stables (pas de pôles)– Les RIF peuvent avoir une caractéristique de phase linéaire
• Retard constant en fréquence (temps de propagation de groupe)• Pas de distorsion harmonique• Symétrie de la RI
– A sélectivité équivalente, ils sont toujours plus coûteux (en temps de calcul) que leur équivalent RII

Notes :
14
IV Filtrage Numérique3.2 Filtres numériques récursifs
3.2 Filtres numériques récursifs
En pratique on a N=M, N est appelée l'ordre du filtre.
)(
)(
1
)(
)()()(
1
0
10
zD
zN
za
zb
zH
inyainxbny
N
i
i
i
M
i
i
i
N
i
i
M
i
i
=+
=⇒
−−−=
∑
∑
∑∑
=
−
=
−
==

Notes :
15
IV Filtrage Numérique3.2 Filtres numériques récursifs
– Si N(z) n'est pas divisible par D(z) (cas général), on a un nombre
infini de termes dans la division polynomiale.
Les coefficients cn sont les valeurs de la RI (h(n) = cn). Ceci montre
qu'un filtre récursif est, dans le cas général, à Réponse
Impulsionnelle Infinie (RII).
– Si N(z) est divisible par D(z) (cas particulier), on a un nombre fini de
termes dans la division polynomiale. Dans ce cas, le filtre est RIF.
• Exemple : filtre moyenneur
∑∑∞
=
−∞
=
− ==00
)()(n
n
i
i
i znhzczH

Notes :
16
IV Filtrage Numérique3.2 Filtres numériques récursifs
– Si N(z)=1 : filtre tout-pôle
– Si D(z)=1 : filtre RIF
• Principales propriétés
– Les RII peuvent être instables : structure à base de pôles et de zéros
– Bande de transition faible
– Synthèse par réutilisation des méthodes analogiques
– Instabilité numérique due au rebouclage : forme cascade plus stable
)(
)(
1
)(
1
0
zD
zN
za
zb
zHN
i
i
i
M
i
i
i
=+
=
∑
∑
=
−
=
−
∏
∏
=
=−
−
−=
N
i
i
M
i
i
MN
pz
zz
zbzH
1
10
)(
)(
)(

Notes :
17
IV Filtrage Numérique4 Analyse fréquentielle
4. Analyse fréquentielleL'analyse fréquentielle est l'étude du module, de la phase et du temps
de propagation de groupe du filtre H.
Ω est la pulsation relative : Ω = ωT = 2πfT
La fonction de transfert en fréquence H(ejΩ) est périodique de période
2π.
Ω2π
|H(ejΩ)|
π
ΩΩ
== j
j
ezzH
eH)(
)(

Notes :
18
IV Filtrage Numérique4 Analyse fréquentielle
ConclusionTrois domaines de représentation
– Temporel h(n), équation aux différences
– Fonction de transfert en z, diagramme des pôles/zéros
– Fréquentiel H(Ω), module, phase
ΩΩ
== j
j
ez
zHeH
)()(
0 1
( )
( ) . ( ) . ( )M N
i i
i i
h n
y n b x n i a y n i= =
= − − −∑ ∑
∑∑∞
=
−∞
=
− ==00
)()(n
n
i
i
i znhzczH
TZ
TZI
jz e Ω=
TF TFI

Notes :
19
IV Filtrage Numérique4 Analyse fréquentielle
Exemple 1
pordre1.avi
( )
1 1
zH z
z a
a
a
=−
∈
− ≤ ≤

Notes :
20
IV Filtrage Numérique4 Analyse fréquentielle
Exemple 2
pzordre1.avi
( )
,
0.9 , 0.9
zH z
z a
a b
a b
=−
∈
− ≤ ≤

Notes :
21
IV Filtrage Numérique4 Analyse fréquentielle
Exemple 3
paordre2.avi
( )( )( *)
1
zH z
z p z p
p
p
=− −
∈
≤

Notes :
22
IV Filtrage Numérique4 Analyse fréquentielle
Exemple 4
prordre2.avi
( )( )( *)
0.9
zH z
z p z p
p
p
=− −
∈
=

Notes :
23
IV Filtrage Numérique5 Structures de réalisation
5. Structures de réalisation– Filtres RIF
∑=
−=N
i
i inxbny0
)()(
+
+
+
Z-1
Z-1
b1
bN-1
bN
x(n-1)
x(n-N)
x(n) y(n)b0
+
Z-1
+
Z-1
+
Z-1
b1
bN-1
bN
y(n)b0
x(n)
a) Structure directe b) Structure transposée

Notes :
24
IV Filtrage Numérique5 Structures de réalisation
– Filtres RII
∑∑
∑∑
=
−=
−
==
+×=×==⇒
−−−=
N
i
i
i
N
i
i
i
N
i
i
N
i
i
za
zbzD
zNzD
zNzH
inyainxbny
1
0
10
1
1
)(
1)(
)(
)()(
)()()(
RII
Z-1
Z-1
b1
bN-1
bN
x(n-1)
x(n-N)
x(n) y(n)
Z-1
Z-1
-a1
-aN-1
-aN
y(n-1)
y(n-N)
+
+
+
+
+
+
Z-1
Z-1
b1
bN-1
bN
x(n) y(n)
Z-1
Z-1
-a1
-aN-1
-aN
+
+
+
RIF
a) Structure directe
b0b0

Notes :
25
IV Filtrage Numérique5 Structures de réalisation
– Filtres RII
−=
−−=
=
=
×+
=×=
∑
∑
∑∑
=
=
=
−
=
−
N
i
i
N
i
i
N
i
i
iN
i
i
i
inwbny
inwanxnw
zWzNzY
zXzD
zW
zb
za
zNzD
zH
0
1
0
1
)()(
)()()(
)().()(
)(.)(
1)(
1
1)(
)(
1)(
x(n) y(n)
RII
Z-1
Z-1
-a1
-aN-1
-aN
+
+
+
+
+
+
Z-1
Z-1
b1
bN-1
bN
RIF
b0
w(n)

Notes :
26
IV Filtrage Numérique5 Structures de réalisation
– Filtres RII
– Forme cascade de filtres du second ordreb) Structure canonique transposée
+
Z-1
+
Z-1
-a1
-aN-1
-aN
+
+
Z-1
b1
bN-1
bN
y(n)b0
x(n)y(n)
Z-1
Z-1
-a1
-aN-1
-aN
Z-1
b1
bN-1
bN
b0x(n) +
+
+
+
+
+
w(n)
w(n-1)
w(n-N)
∏∏+
=−−
−−+
= ++
++==
2
1
12
2,
1
1,
2
2,
1
1,0,2
1
1 1)()(
N
i ii
iii
N
i zaza
zbzbbzHizH
H1(z)X(z) Y(z)
H2(z) HK(z). . .
a) Structure canonique directe

Notes :
27
V. Transformées en TNS
1. TFD, convolution linéaire
2. TFR : Transformée de Fourier Rapide

Notes :
28
V Transformées en TNS1 Rappels
• TFSD : Transformée de Fourier d'un Signal Discret
x(nT) non périodique
• Propriétés– Linéarité
– Décalage en temps/fréquence
– Produit de convolution en temps/fréquence
– Théorème de Parseval
– Transformées de fonctions réelles
Ω=
=
=
Ω
−
Ω
∞
−∞=
Ω−Ω
∞
−∞=
−
∫
∑
∑
deeXnTx
enTxeX
enTxeX
jnj
n
jnj
n
TjnTj
π
π
ωω
π)(
2
1)(
)()(
)()(

Notes :
29
V Transformées en TNS2 Transformée de Fourier Discrète
• TFD– En pratique, on prend seulement un nombre fini d'échantillons de
x(nT). On ne peut donc obtenir qu'un nombre fini d'échantillons
fréquentiels de X(ejΩ).
−==
−==
∑
∑−
=
+
−
=
−
1
0
2
1
0
2
1..0)(1
)(
1..0)()(
N
k
N
nkj
N
n
N
nkj
NnekXN
nx
NkenxkX
π
πx(n) est considéré comme périodique de période N, x(n) = x(n+qN)
X(k) est donc également périodique de période N, X(k) = X(k+qN)
n
x(n)
N-1
Pas temporel : T=1/Fe
k
X(k)
N-1
Pas fréquentiel : 1/NT=Fe/N
TFD

Notes :
30
V Transformées en TNS2 Transformée de Fourier Discrète
• Propriétés– Linéarité
– Décalage en temps/fréquence
– Produit de convolution en temps/fréquence• Convolution discrète
• Convolution circulaire (ou périodique)
– Théorème de Parseval
– Transformées de fonctions réelles
• Relation entre TFSD et TFD– Signaux de durée finie ou périodique
– Cas général ?

Notes :
31
TFD
X(k) ⇔x(n)
x(n) et X(k) sont, dans le cas général, des nombres complexes.
X = W . x (2)
X(0)
X(1)
.
.
X(N-1)
=
1 1 . . 1
1 WN1
WN2
. WNN-1
. WN2
WN4
. WN2(N-1)
. . . . .
1 WNN-1
WN2(N-1)
. WN(N-1) 2
×
x(0)
x(1)
.
.
x(N-1)
• Définition
• Forme Matricielle
V Transformées en TNS2 Transformée de Fourier Discrète
−==
−==
∑
∑−
=
+
−
=
−
1
0
2
1
0
2
1..0)(1
)(
1..0)()(
N
k
N
nkj
N
n
N
nkj
NnekXN
nx
NkenxkX
π
π
nkN
j
kn
N
N
j
N
eW
eW
π
π
2
2
−
−
=
=

Notes :
32
V Transformées en TNS2 Transformée de Fourier Discrète
La TFD revient à calculer un produit matrice-vecteur où chaque élément est de type complexe. La complexité de calcul de la TFD est de N2 multiplications, et de N(N-1) additions sur des nombres complexes. Ceci revient à une complexité de 4N2
multiplications réelles et N(4N-2) additions réelles. Cet algorithme se comporte donc en O(N2), mais ne possède pas de problèmes d'adressage car les x(n) et les Wi sont rangés dans l'ordre en mémoire.
Complexité de calcul
– En 1965, Cooley et Tuckey [COOLEY 65] ont publié un algorithme applicable quand N est le produit de 2 ou plusieurs entiers dont la complexité est en O(Nlog2N)
Wk(N-n)N = (W
knN )* (3.1)
WknN = W
k(n+N)N = W
(k+N)nN (3.2) Périodicité
Wn+N/2N = -W
nN (3.3) Symétrie
W2knN = W
knN/2 (3.4)
Propriétés des Wn
N = e -2jπnN
Notes :
33
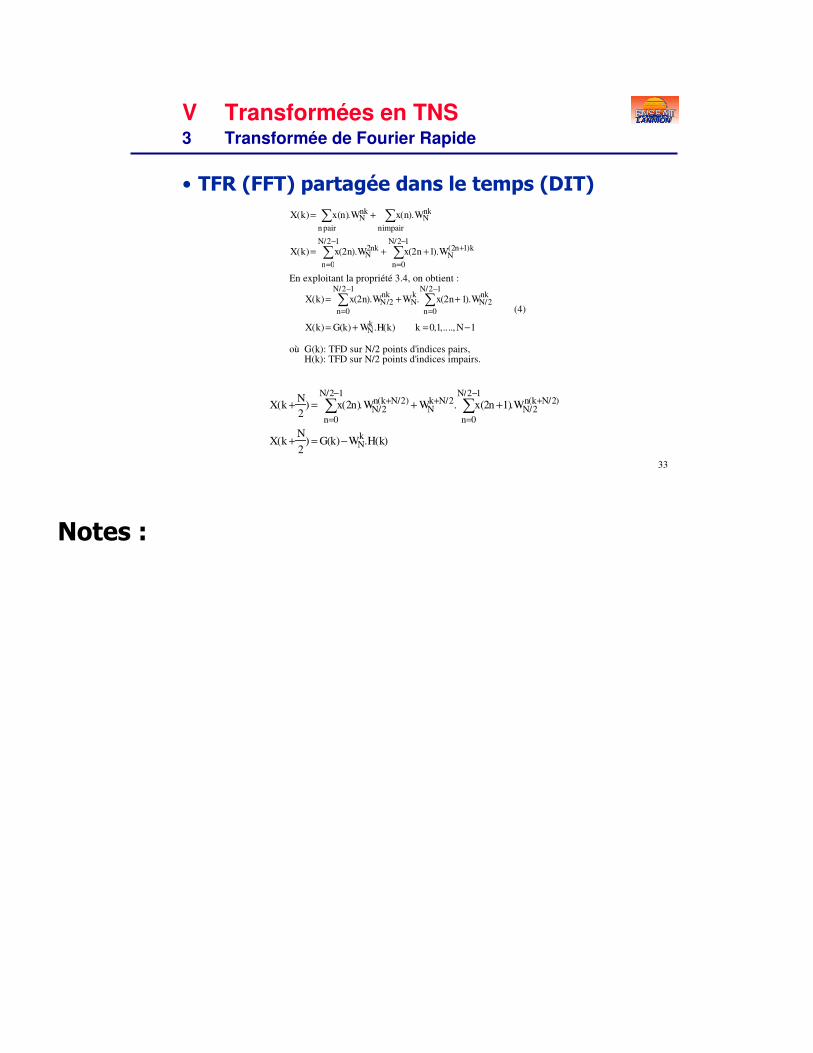
En exploitant la propriété 3.4, on obtient :
(4)
où G(k): TFD sur N/2 points d'indices pairs,H(k): TFD sur N/2 points d'indices impairs.
X(k)= x(n).WNnk
n pair
∑ + x(n).WNnk
nimpair
∑
X(k)= x(2n)
n=0
N/2−1
∑ .WN2nk + x(2n +1)
n=0
N/2−1
∑ .WN(2n+1)k
X(k)= x(2n)
n=0
N/2−1
∑ .WN/2nk +WN
k. x(2n+ 1)
n=0
N/2−1
∑ .WN/2nk
X(k)= G(k) + WNk .H(k) k =0,1,...., N−1
X(k +N
2) = x(2n)
n=0
N/2−1
∑ .WN/2n(k+N/2) + WN
k+N/2. x(2n +1)
n=0
N/2−1
∑ .WN/2n(k+N/2)
X(k +N
2) = G(k)−WN
k.H(k)
V Transformées en TNS3 Transformée de Fourier Rapide
• TFR (FFT) partagée dans le temps (DIT)

Notes :
34
••• TFR DIT •••
x(0)
x(2)
x(4)
x(6)
x(1)
x(3)
x(5)
x(7)
TFD
N/2 pts
TFD
N/2 pts
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
W80
W81
W82
W83
W84
W85
W86
W87
O(N )2 O(N)
Xm(p)
Xm(q)
Xm+1 (p)
Xm+1 (q)
-1WNr
Xm+1 (p) = X m(p) + WrN Xm(q)
Xm+1 (q) = X m(p) - WrN Xm(q) (6)
Complexité d'un papillon : 1 multiplication complexe, 2 additions/soustractions complexes
Papillon DIT
N/2 papillons2 TFD de taille N/2

Notes :
35
••• TFR DIT •••
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
so
rtie
ord
re n
orm
al
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
en
tré
e o
rdre
bit-r
eve
rse
d
0
0
0
0
0
0
0
0
0
1
2
3
4
5
6
7
0
2
4
6
0
2
4
6
0
2
FFT DIT RADIX-2 en place sur 16 points
A
B
A'
B'
FFT FFT inverse
A' = A + BW B' = A - BW W= e
A' = A + BW B' = A - BW W= e
k -kk
k -k
DIT:
(Décimation en
temps)
-2j π
N
-2j π
N
0
2
0
2
0
2
N2 log2N multiplications de nombres complexes,
N log2N additions/soustractions de nombres complexes, ou,
2 N log2N multiplications de nombre réels,3 N log2N additions/soustractions de nombre réels.
Notes :
36
••• TFR DIF •••
X(0)
X(2)
X(4)
X(6)
X(1)
X(3)
X(5)
X(7)
TFD N/2 pts
TFD N/2 pts
x(0)
x(1)
x(2)
x(3)
x(4)
x(5)
x(6)
x(7)
W80
W81
W82
W83
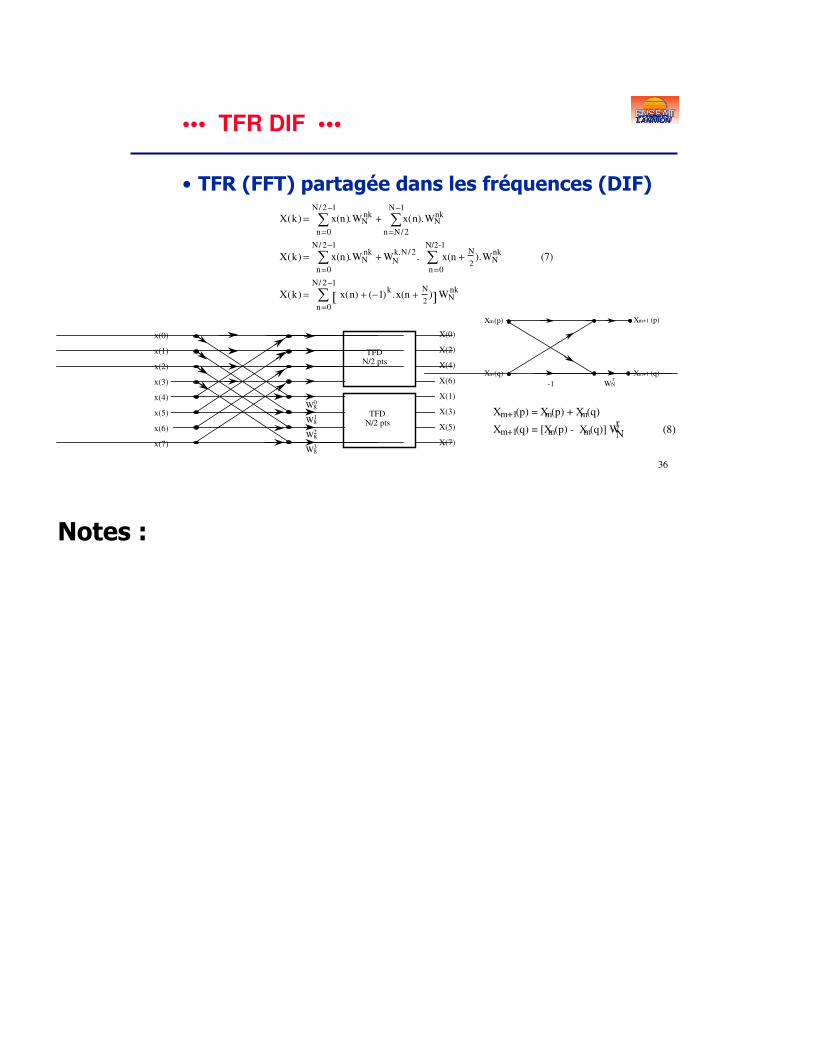
Xm(p)
Xm(q)
Xm+1 (p)
Xm+1 (q)
-1 WNr
Xm+1(p) = Xm(p) + Xm(q)
Xm+1(q) = [Xm(p) - Xm(q)] WrN (8)
• TFR (FFT) partagée dans les fréquences (DIF)
(7)
X(k) = x(n)
n=0
N/ 2−1
∑ .WNnk + x(n)
n=N/ 2
N−1
∑ .WNnk
X(k) = x(n)
n=0
N/ 2−1
∑ .WNnk + WN
k.N/ 2. x(n +
N
2)
n=0
N/2-1
∑ .WNnk
X(k) = x(n) + (−1)k.x(n +
N
2)
n=0
N/ 2−1
∑ WNnk
[ ]

Notes :
37
••• TFR DIF
A
B
A'
B'
FFT FFT inverse
A' = A + B B' = (A-B) W W= e
A' = A + B B' = (A-B) W W= e
k -k k
-2j π
N
-2j π
N
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
0
1
2
3
4
5
6
7
0
2
4
6
0
2
4
6
0
4
0
4
0
4
0
4 0
0
0
0
0
0
0
0
FFT DIF RADIX-2 en place sur 16 points
entr
ée:
ord
re n
orm
al
sort
ie:
ord
re b
it-r
ever
sed
DIF:
(Décimation en
fréquence)

Notes :
38
Transformée de Fourier Rapide
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
0
0
0
0
0
0
0
0
4
4
4
4
0
0
0
0
7
3
5
1
6
2
4
0
6
6
2
2
4
4
0
0
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
en
tré
e:
ord
re n
orm
al
so
rtie
: o
rdre
bit-r
eve
rse
d
FFT DIT RADIX-2 en place sur 16 points
A
B
A'
B'
FFT FFT inverse
A' = A + BW B' = A - BW W= e
A' = A + BW B' = A - BW W= e
k -kk
k -k
DIT:
(Décimation en
temps)
-2j π
N
-2j π
N

Notes :
39
Transformée de Fourier Rapide
A
B
A'
B'
FFT FFT inverse
A' = A + B•W B' = A - B•W W= e
A' = A + B•W B' = A - B•W W= e
k -k
-2jš
N
FFT GEOMETRIE CONSTANTE sur 16 points
entr
ée:
ord
re b
it-r
ever
sed
sort
ie:
ord
re n
orm
al
Géométrie
Constante
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
k-2jš
N
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
0
0
0
0
0
0
0
0
0
0
0
0
4
4
4
4
0
2
4
6
0
2
4
6
0
1
2
3
4
5
6
7
k -k

Notes :
40
Transformée de Fourier Rapide
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
X(8)
X(9)
X(10)
X(11)
X(12)
X(13)
X(14)
X(15)
FFT DIF RADIX-4 en place sur 16 points
entr
ée:
ord
re n
orm
al
sort
ie:
ord
re b
it-r
ever
sed
0
1
2
3
0
0
0
0
FFT FFT inverse
A' = A+B+C+D B' = (A-jB-C+jD)W C' = (A-B+C-D)W D' = (A+jB-C-jD)W W = e
k
2k
-2jš N
A
D
B
C
A'
D'
B'
C'
k
2k
3k
3k
A' = A+B+C+D B' = (A-jB-C+jD)W C' = (A-B+C-D)W D' = (A+jB-C-jD)W W = e
-k
-2k
-2jš N
-3k

Notes :
41
V.4 Convolution et corrélation1 Définitions
• Corrélation– Soit x1 et x2, 2 signaux de durée finie [0 ... N-1], la corrélation est :
• Convolution linéaire– Soit x et h, 2 signaux de durée finie respectivement N et M, la
convolution est définie par :
Le signal y(n) est de durée [0 ... N+M-2]
∑−
=
+=1
0
21 )()()(N
i
nixixny
∑∑∞
=
∞
=
−=−=
∗=
00
)()()()()(
))(()(
ii
inxihinhixny
nhxny

Notes :
42
V.4 Convolution et corrélation1 Définitions
• Exemple de convolutionN > M
i
x(i)
N-1 i
h(i)
M-1
i
h(-i)
*
∑=
−=n
i
inhixny0
)()()(
n
y(n)
in
h(n-i)
n-M+1
N+M-2
∑∞
=
−=0
)()()(i
inhixny

Notes :
43
V.4 Convolution et corrélation1 Définitions
• Propriétés– Y(z) = H(z) X(z) (TZ)
– Y(k) ≠ H(k) X(k) (TFD)
• Vue matricielle de la convolution
O(N2)
−
×
−
−=
−+ )1(
.
.
)1(
)0(
)1(..00
)0(...0
0...)1(
0..)0(.
0..0)0(
)2(
.
.
)1(
)0(
Nx
y
x
Mh
h
Mh
h
h
MNy
y
y

Notes :
44
V.4 Convolution et corrélation2 Convolution circulaire
• Convolution circulaire– Soit x et h, 2 signaux périodiques de période N, la convolution
circulaire est définie par :
Le signal y(n) est de période N
h(n-i) est évalué modulo N
TFD : Y(k) = H(k).X(k)
)()()(
)()()(1
0
nhnxny
inhixnyN
i
∗=
−= ∑−
=

Notes :
45
V.4 Convolution et corrélation2 Convolution circulaire
• Convolution circulaire– On passe de la convolution circulaire à la convolution linéaire en
remplissant de zéros chaque séquence jusqu'à M+N-1
*
x(n)0….0
N+M-1
h(n)0….0
y(n)

Notes :
46
V.4 Convolution et corrélation3 Convolution rapide
• Convolution rapide– Passer dans le domaine de Fourier par une TFD : la convolution se
transforme en produit
– Utiliser la FFT sur P points pour accélérer les calculs
– Compléter les suites x(n) et h(n) par des zéros jusqu’à P >
N+M-2, avec P = 2p.
O(Nlog2N)
X
x(n)0….0
Longueur P
h(n)0….0
y(n)
FFT
FFT
FFT-1

Notes :
47
V.4 Convolution et corrélation3 Convolution rapide
– Problème : h(n) et x(n) doivent être de durée finie
– Application : FIR rapide• h(n) de durée M : H(k) peut être calculé une fois pour toute
• x(n) de durée infinie
• Convolution sectionnée– x(n), de durée infinie, est découpé en blocs xk de taille M
∑
∑∞
−∞=
∞
−∞=
=
=
+<≤
=
k
k
k
k
k
nyny
nxnhny
ailleursO
MknkMpournxnx
)()(
)(*)()(
)1()()(

Notes :
48
V.4 Convolution et corrélation3 Convolution rapide
• Méthode OLA (Overlap Add)– Blocs xk de taille M
– Addition des recouvrements entre les yk
• Méthode OLS (Overlap Save)– Blocs xk de taille N+M avec recouvrement
– Troncature des yk sur M points, addition entre les yk

Notes :
49
VI QuantificationÉvaluation de la précision
Introduction : pourquoi la quantification ?
1. Formats de codage (rappels)Virgule fixe, complément-à-2
2. Modèle de quantificationCaractéristiques de quantificationModèle de bruit, caractéristiques de dépassement
3. Bruit de conversionFiltrage d’un bruit
4. Limitation des chemins de données
5. Effets en TNSFiltrage RIF, RII, cycles limites, quantification des coefficients

Notes :
50
Codage en virgule fixe complément à 2
• Rappel codage en virgule fixe
• m : distance (en nombre de bits) entre la position du bit le plus significatif pMSB et la position de la virgule pV
• n : distance entre la position de la virgule pV et la position du bit le moins significatif pLSB
S bm-1 bm-2 b1 b0 b-1 b-2 b-n+2 b-nb
-n+1
2-n
2-121 20
Partie entière Partie fractionnaire
∑−
−=
+−=1
22m
ni
i
i
mbSx
m npMSB
pLSB2m-1-2m

Notes :
51
Qx(n) xQ(n) = Q[x(n)] = k.q x(n) xQ(n)
+
e(n) = Q[x(n)] - x(n)
VI Quantification2 Modèle en VFCG
• Modèle bruit additif
– Définition : approximation de chaque valeur d’un signal x(n) par un
multiple entier du pas de quantification élémentaire q.
– e(n) est l’erreur de quantification
• Sources de bruit– Bruit de conversion A/N
– Limitation des chemins de données de l’architecture cibleÉlimination de bits lors d’un changement de format

Notes :
52
VI Quantification2 Caractéristiques de quantification
(a) Arrondi
Q(x) = k.q si (k-0.5).q ≤ x < (k+0.5).q
(b) Troncature
Q(x) = k.q si k.q ≤ x < (k+1).q
Q(x)
3q
2q
q xq 2q
Q(x)
3q
2q
q xq 2q
P(e)
1/q
q/2-q/2
e
P(e)
1/q
0-q
e
Etude statistique
• e(n) est une séquence d’un processus aléatoire continu et stationnaire
• e(n) est décorrélée de x(n)
• e(n) est un bruit blanc additif
• la distribution de probabilité de e(n) est uniforme sur l’intervalle de quantification
• ergodicité : moyennes temporelles = moyennes statistiques
• moyenne me = moyenne temporelle
• variance σe2 = puissance du bruit
variance = q2/12

Notes :
53
VI Quantification2 Caractéristiques de quantification
• Bruit lié à l’élimination de k bits
• Processus aléatoire discret
• Moments
S bm-1 b0 b-1 b-n+2 b-nb
-n+1b
-j-1b
-j
2-n2-120
n
2m-1 2-j-12-j
j k
Bits restants Bits supprimés
)( ep
ne 2.
)( ep
ne 2.
(a) Arrondi (b) Troncature
( )k
bb
q 22
2 2112
0 −−== σµ ( ) ( )k
b
k
b
qq 22
2 2112
212
−− −=−= σµ
( )jq
−= 2
Notes :
54
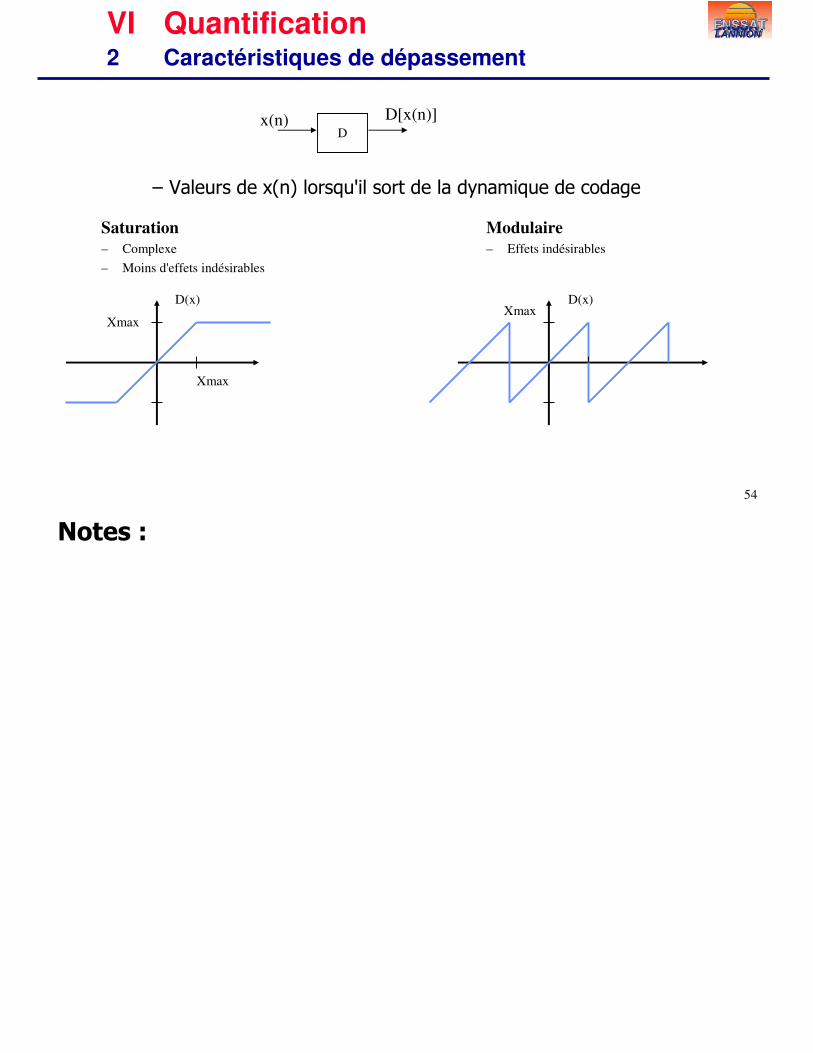
VI Quantification2 Caractéristiques de dépassement
Dx(n) D[x(n)]
– Valeurs de x(n) lorsqu'il sort de la dynamique de codage
Saturation
– Complexe
– Moins d'effets indésirables
Modulaire
– Effets indésirables
Xmax
XmaxXmax
D(x) D(x)

Notes :
55
VI Quantification2 Caractéristiques de dépassement
– Afin d'éviter le dépassement, on diminue l'amplitude avant ou
pendant le traitement par un facteur d'échelle A < 1 (scaling).
• A peut être combiné avec les valeurs des coefficients
• A puissance de 2 (en pratique)
• Critères– Critère du pire-cas (ou norme L1)
Pas de dépassement tant que |x(n)|<Xmax
– Critère de puissance (ou norme L2)Pas de dépassement tant que Px<Pmax
– Critère bande étroite (ou norme Chebychev)Pas de dépassement tant que |x(n)| < Xmax, avec x(n) sinusoïdal.
h(n)x(n) y(n)A

Notes :
56
VI Quantification3 Bruit de conversion A/N
xQ(n) = Q[x(n)]
e(n) = xQ(n) - x(n)
|e(n)| ≤≤≤≤ q/2
Quantification en conversion A/N Quantification d'une sinusoïde
n
x(n)
3q
2q
q
n
xQ(n)
3q
2q
q
n
e(n)
q/2
- q/2
CANx(n) xQ(n)

Notes :
57
CAN
Q
x(n) x(n) xQ(n)+
e(n)
Filtre
H(z)
xQ(n) y(n)Filtre
H(z)
y(n)
Filtrage d'un bruit
• Exemple : filtrage du bruit de conversion
• En entrée du filtre– Signal x(n) + Bruit de conversion e(n)
Le RSB augmente de 6dB par bit ajouté
2
2)1(2
2
2
2
2
22
2
log1077.402.6log10
2.1212/
',12
xdB
x
bx
e
x
xe
bRSBRSB
qRSB
entréedsignaldupuissanceq
σ
σσ
σσ
σσ
++==
===
=
−

Notes :
58
VI Quantification4 Limitation des chemins de données
• Limitation des chemins de données de l’architecture cible– Multiplication => Quantification
– Addition => Débordement
0,1101 0,8125
+ 0,1001 + 0,5625
01,0110 1,375
0,1101 0,8125
x 0,1001 x 0,5625
00,0111 0101 0,4570 3125

Notes :
59
Exemple du filtre FIR
• Sources de bruit :
×c0
+
z-1 z-1 z-1
bg mem
+bgm0
+
bx
×c1
+
+bgm1
×cN-2
+
+bgm N-2
×cN-1
+
+bgm N-1
+
x (n)
y (n)
)(nx )(nyh+
bx
bg mem
+
N.bgm

Notes :
60
Exemple du filtre FIR
• Puissance du bruit en sortie (arrondi)
∑−
=′ ++=
1
0
2222
.
N
i
bbbb igmmemeyσσσσ
∑∑−
=
+∞
−∞=
++=1
0
22222
.)(
N
i
bb
m
bb igmmemeymh σσσσ
12.
1212
221
0
22
2 mimemN
m
me
b
qN
qc
qy
++= ∑−
=
σ

Notes :
61
VII. Synthèse des filtres numériques RII
1. Introduction
2. Rappels sur la synthèse des filtres analogiques
3. Invariance impulsionnelle
4. Transformation bilinéaire
Notes :
62
VII Synthèse des filtres RII1 Introduction
• Recherche de H(z) correspondant aux spécifications (gabarit)– Transposition des méthodes de synthèse applicables aux filtres
analogiques, puis transformation de H(p) vers H(z)Invariance impulsionnelle
Transformation bilinéaire
– Synthèse directe en z
– Méthodes d'optimisation : minimiser un critère d'erreur entre courbe
réelle et courbe idéale

Notes :
63
VII Synthèse des filtres RII2 Synthèse de filtre analogique
Spécification
Gabarit analogique
Gabarit normalisé
Normalisation
Ordre du filtre
HNorm(p)
Approximation de H(p)
Types de filtre
(Butterworth, Chebyshev,...)
H(p)
Dénormalisation
Filtrage numérique Filtrage analogique
Transformation p=f(z)
invariance impulsionnelle,
bilinéaire
Choix d’une structure Rauch, Sallien-Key,
Biquadratique

Notes :
64
VII Synthèse des filtres RII2 Synthèse de filtre analogique
• Normalisation– Calcul de la sélectivité s
ω1
1
|HNorm(p)|
1-δ1
1+δ1
δ2
1/s
ω0
|HNorm(p)| (dB)
−∆1
∆1
∆2
a) Gabarit prototype linéaire b) Gabarit prototype en dB
1 s

Notes :
65
VII Synthèse des filtres RII2 Synthèse de filtre analogique
• Ordre du filtre et fonction de transfert normalisée– Butterworth, Chebyschev, Elliptique, Bessel, Legendre, ...
– HNORM(pN)
• Dénormalisation– Passe-bas : pN = p / ωc
– Passe-haut : pN = ωc / p
– Passe-bande : pN = 1/B (p / ω0 + ω0 / p)
• On obtient une fonction de transfert H(p) respectant le gabarit analogique spécifié
⇒ Passage vers H(z)

Notes :
66
VII Synthèse des filtres RII3 Invariance impulsionnelle
• Le filtre numérique et le filtre analogique ont la même réponse impulsionnelle
t
ha(t)
Ha(p)x(t) y(t)
filtre analogique
t
h(nT)
H(z)x(nT) y(nT)
filtre numérique
T
h(nT) = ha(t) / t = nT
Notes :
67
VII Synthèse des filtres RII3 Invariance impulsionnelle
• Le filtre numérique et le filtre analogique ont la même réponse impulsionnelle
– Conserve la réponse temporelle et la stabilité
– Phénomène de recouvrement de spectre du à l'échantillonnage
– Non respect de la spécification fréquentielle
∑∑∑∑
−−−−====
→→→→ →→→→→→→→
−−−−
====−−−−
)(1
,1
)()(
)()()()(1
pHdeppôles
ipT
a
TznTt
a
L
a
ai
pez
pHRésiduszH
directenformulatioou
zHnThthpH
( )∑ +=Ω
kT
k
a
jjjH
TeH
πω 21)(

Notes :
68
• Réponse fréquentielle
– Normalisation(xT) ou (/H(0))
VII Synthèse des filtres RII3 Invariance impulsionnelle
1
Ha(p)
1/T
p
Ω
2Π−2Π Π
H(Ω)

Notes :
69
VII Synthèse des filtres RII4 Transformation bilinéaire
• Approximation d'une intégrale par la méthode des rectangles1
1
1
1
12−
−
+−
=z
z
Tp
t
e(nT)
nT(n-1)T
S(n) = S(n-1) + T[e(n) + e(n-1)]/2
H(z)e(n) s(n)
1/pe(t) s(t)
Intégrateur
analogique
Intégrateur
numérique
1Appelée également, selon les sources, méthode des trapèzes

Notes :
70
VII Synthèse des filtres RII4 Transformation bilinéaire
– Conservation de la stabilité
– Relation entre fréquences numériques et analogiques
plan p
p = jωa
plan z
z = ejωT
π 0

Notes :
71
VII Synthèse des filtres RII4 Transformation bilinéaire
– Distorsion en fréquence connue
fe/2
filtre analogique filtre numérique
fe/2
π
π/T
ωa
ωT
−π
=22
Ttg
Tnumériqueanalogique ωω

Notes :
72
VII Synthèse des filtres RII4 Transformation bilinéaire
• Procédure de synthèse
– A partir du gabarit en fréquence numérique ωn
– Effectuer une prédistorsion en fréquence
– Synthèse de H(p) par méthodes du chapitre V.2
– Transformation bilinéaire
=22
Ttg
Tna ωω
1
1
1
12)(
)(
−
−
+−
==
z
z
Tp
pHzH
Notes :
73
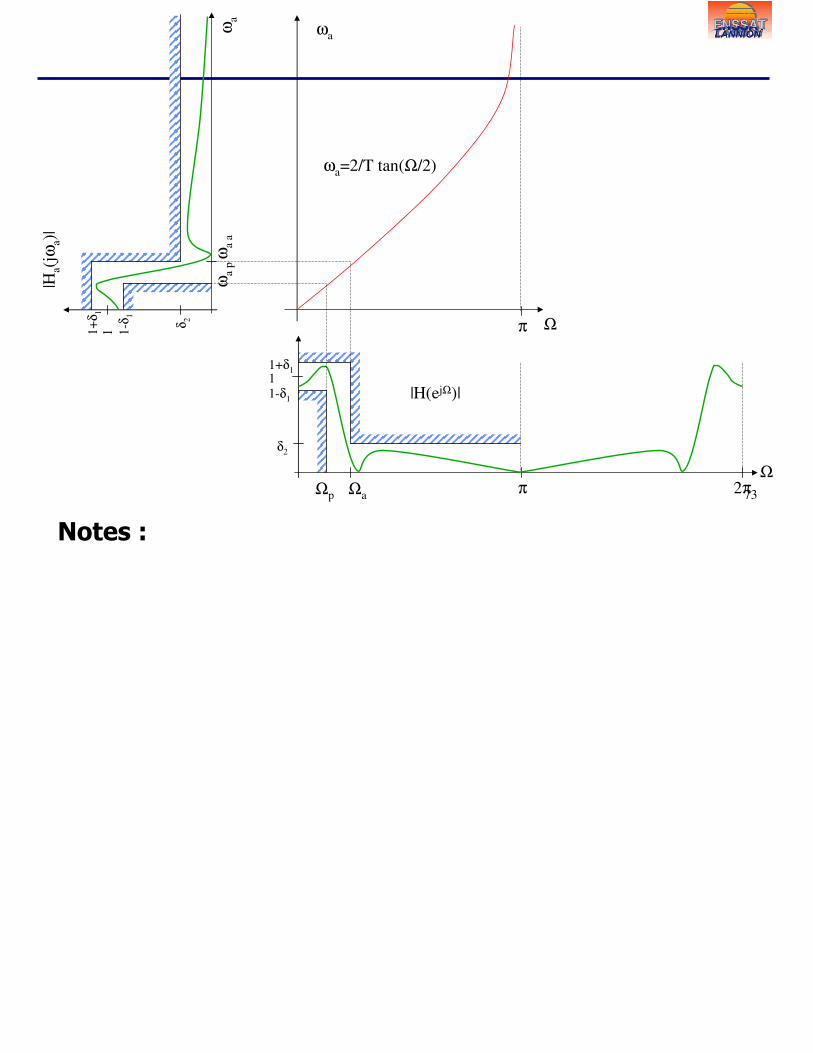
ΩπΩp
1
|H(ejΩ)|1-δ1
1+δ1
δ2
Ωa
ωa
p
1
|Ha(
j ωa)|
1-δ
1
1+
δ 1
δ 2
ωa
a
π
ωa
ωa
Ω
ωa=2/T tan(Ω/2)
2π

Notes :
74
VII Synthèse des filtres RIIExemple
• Filtre numérique analogique du premier ordre
– Invariance impulsionnelle : Hi(z)
– Transformation bilinéaire : Hb(z)
CR
ppH
c
c
.
1
1
1)(
====
++++====
ω
ω
fc = 1 KHz, fe = 10 Khz

Notes :
75
VIII. Synthèse des filtres numériques RIF
1. Introduction
2. Filtres à Phase Linéaire
3. Méthode du Fenêtrage
4. Échantillonnage en Fréquence
Notes :
76
VIII Synthèse des filtres RIF1 Introduction
• Recherche de H(z) correspondant aux spécifications (gabarit)– Synthèse directe en z
– Filtres à phase linéaire ou minimale
• 3 méthodes de synthèse– Méthode du fenêtrage
– Méthode de l'échantillonnage fréquentiel
– Méthodes d'optimisation : minimiser un critère d'erreur entre courbe
réelle et courbe idéale

Notes :
77
VIII Synthèse des filtres RIF2 Phase linéaire
• Filtre à phase minimale– Zéros dans le cercle unité
• Filtre à phase linéaire
– Condition pour avoir une phase linéaireSymétrie ou antisymétrie par rapport à α = (N-1)/2
Ω−=Ω
−Ω
Ω= ΩΩ
αβϕ
ϕ
)(
)(:)(
).()( )(
amplitudemodulepseudoAavec
eAeHjj

Notes :
78
VIII Synthèse des filtres RIF2 Phase linéaire
réponse impulsionnelle symétrique
β=0
réponse impulsionnelle antisymétrique
β=±π/2
N impair
α entier
N pair
α non entier
h(n)
α N-1
h(n)
α N-1
h(n)
α N-1
h(n)
α N-1
Type I
Type II
Type III
Type IV

Notes :
79
VIII Synthèse des filtres RIF2 Phase linéaire
N impair
N pair
ααα
αα
…1),(2),(
)cos()(
0
0
=−==
Ω= ∑=
Ω−Ω
nnhaha
naeeH
n
n
n
jj
0)(
2/1),2/(2
])cos[()(2/
1
2/1
=
=−=
Ω−= ∑=
Ω−Ω
π
α
H
NnnNhb
nbeeH
n
N
n
n
jj
…
0)()0(
1),(2
)sin()(1
2
==
=−=
Ω= ∑=
Ω−Ω
π
αα
αα
π
HH
nnhc
nceeeH
n
n
n
jj
j
…
0)0(
2/1),2/(2
])sin[()(2/
1
2 2/1
=
=−=
Ω−= ∑=
Ω−Ω
H
NnnNhd
ndeeeH
n
N
n
n
jj
j
…
απ
Tout filtre
Passe Haut
Passe Bande
Dérivateur
Passe Haut
Dérivateur
Type I
Type II
Type III
Type IV
Réponses fréquentielles

Notes :
80
VIII Synthèse des filtres RIF2 Phase linéaire
N impair
N pair
Tout filtre
Passe Haut
Passe Bande
Dérivateur
Passe Haut
Dérivateur
π 2π
Type I
Type II
Type III
Type IV
π 2π
π 2π
π 2π
Réponses fréquentielles

Notes :
81
VIII Synthèse des filtres RIF3 Méthode du fenêtrage
• Développement en série de Fourier du filtre idéal
– Filtre non causal, de type RII
• Passage de h(n) idéal au RIF approché par fenêtrage de h(n)
∫−ΩΩ Ω=
π
ππdeeHnh jnj ).(
2
1)(
∑∞
−∞=
Ω−Ω =n
jnjenheH )()(
)().()( nwnhnha =

Notes :
82
VIII Synthèse des filtres RIF3 Méthode du fenêtrage
• Exemple : filtre passe-bas idéal
Filtre passe-bas idéal
c
cc
n
nnh
ΩΩΩ
=)sin(
)(π
ΩπΩc
1
−Ωc−π
|H(ejΩ)|

Notes :
83
VIII Synthèse des filtres RIF3 Méthode du fenêtrage
• Prise en compte d'une condition de phase linéaire par décalage de αααα
• Fenêtrage de h(n))()()()().()( ΩΩΩ ∗=⇔= jjj
aa eWeHeHnwnhnh
H(Ω) W(Ω)*
=
H(Ω)^
Notes :
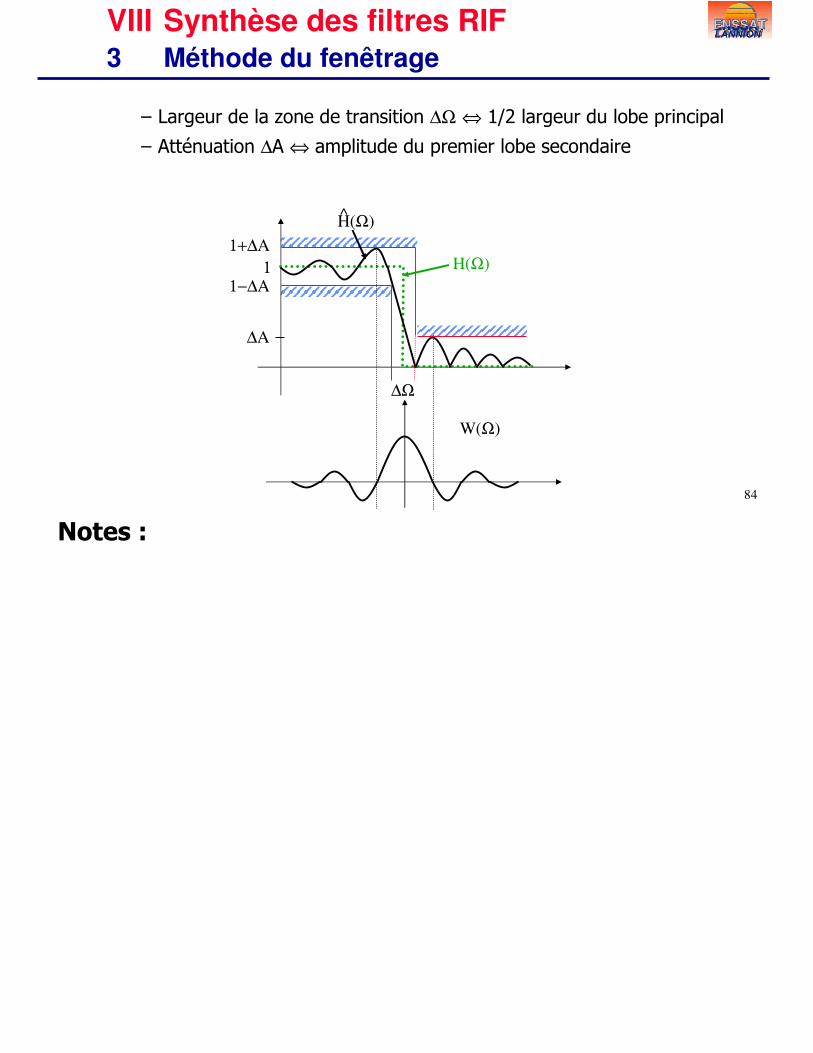
84
∆Ω
∆A
1+∆A
H(Ω)^
H(Ω)
W(Ω)
11−∆A
VIII Synthèse des filtres RIF3 Méthode du fenêtrage
– Largeur de la zone de transition ∆Ω ⇔ 1/2 largeur du lobe principal
– Atténuation ∆A ⇔ amplitude du premier lobe secondaire

Notes :
85
VIII Synthèse des filtres RIF3 Méthode du fenêtrage
• Fenêtres usuelles– Rectangle, Triangle, Hanning, Hamming, Blackman, Kaiser, ...
– Réponses temporelles
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
n
w(n
)
RectangulaireBartlettHanningHammingBlackman

Notes :
86
VIII Synthèse des filtres RIF3 Méthode du fenêtrage
• Fenêtres usuelles– Réponses fréquentielles (linéaire, dB)
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre rectangulaire
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Bartlett
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Hanning
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Hamming
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Blackman
0 0.1 0.20
0.2
0.4
0.6
0.8
1
|W| l
inea
ire
Fenêtre rectangulaire

Notes :
87
VIII Synthèse des filtres RIF3 Méthode du fenêtrage
• Influence de la fenêtre
– Le type de fenêtre influe sur ∆A et ∆Ω
– Le nombre de points influe sur ∆Ω
Fenêtre Lobesecondaire
Demi largeur dulobe principal
Atténuationminimum
Rectangulaire -13dB 2π/N -21dBTriangulaire -25dB 4π/N -25dBHanning -31dB 4π/N -44dBHamming -41dB 4π/N -53dBBlackman -57dB 6π/N -74dB

Notes :
88
VIII Synthèse des filtres RIF4 Méthode de l'échantillonnage
• Échantillonnage en fréquence– Échantillonnage du filtre idéal
– TFD inverse de H(kΩe)
– Méthode valable pour tout type de filtre
– Possibilité d'utiliser un fenêtrage
ΩπΩc
1
H(ejΩ)
H(kΩe)
2π
∑−
=
Ω=1
0
.2
)(1
)(N
k
knN
j
e ekHN
nh
π
Notes :
89
IX. Analyse spectrale
1. Effets de la troncature
2. Caractéristiques des fenêtres
3. Influence sur l'analyse

Notes :
90
IX Analyse spectrale1 Définition
• Analyse spectrale de signaux continus– Etude du contenu fréquentiel (spectre) d'un signal continu xc(t)
– Nombre limité d'échantillons du signal d'entrée pour la TFD
• Troncature temporelle– xN(n) = x(n) . wN(n) avec wN(n) fenêtrage sur N points
– T0 = N.T : horizon d'observation
xc(t)Filtre P.Bas
anti-repliement
Ωc = π
CAN
Fe
x(n)x
fenêtre wN(n)
xN(n)FFT
||2
φ

Notes :
91
IX Analyse spectrale2 Troncature temporelle
• Troncature temporelle– xN(n) = x(n) . wN(n) avec wN(n) fenêtrage sur N points
• Influence sur le spectre– Convolution fréquentielle
• TFD du signal tronqué
Lk
j
NN
L
n
L
nkj
NN
eXkX
NL
LkenxkX
/2
1
0
2
)()(
1..0)()(
π
π
=Ω
Ω
−
=
−
=
≥
−== ∑
)(*)()( ΩΩΩ = j
N
jj
N eWeXeX
Notes :
92
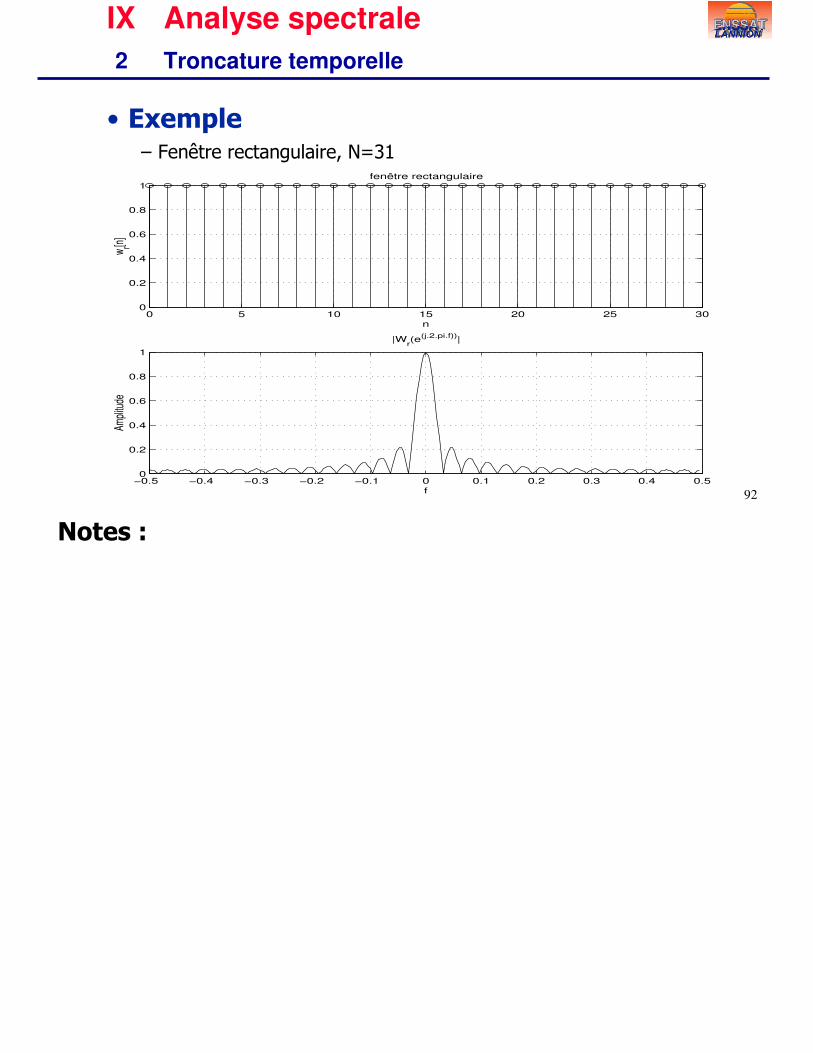
IX Analyse spectrale2 Troncature temporelle
• Exemple – Fenêtre rectangulaire, N=31
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1fenêtre rectangulaire
n
w r[n]
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
0.2
0.4
0.6
0.8
1
f
Ampl
itude
|Wr(e
(j.2.pi.f))|

Notes :
93
IX Analyse spectrale3 Influence de la fenêtre
0 5 10 15 20 25 30 35−1
−0.5
0
0.5
1
(a) : Fonction cos(2pi fo n) échantillonnée tronquée sur N=32 points
x N(n
)
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
5
10
15
(c) : XN
(k)=TFDxN
(n)−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
5
10
15
20
(b) : XN
(ej2pif
)=TFxN
(n(
– fonction cosinus fenêtrée sur N=32 points

Notes :
94
• Influence de la fenêtre
– Le type de fenêtre influe sur λ et ∆Ωm
– Le nombre de points influe sur ∆Ωm
IX Analyse spectrale3 Influence de la fenêtre
Fenêtre Lobe secondaire λ = 20log|W(fs)/W(0)|
Largeur du lobe principal LLP = ∆Ωm
Rectangulaire -13dB 4π/N Triangulaire -25dB 8π/N Hanning -31dB 8π/N Hamming -41dB 8π/N Blackman -57dB 12π/N
W(Ω)
Ω
f∆Ωm
∆Ωm/2
λ
fs1/NT
π
fe/2

Notes :
95
IX Analyse spectrale3 Influence de la fenêtre
• Fenêtres usuelles– Rectangle, Triangule, Hanning, Hamming, Blackman, Kaiser, ...
– Réponses temporelles
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
n
w(n
)
RectangulaireBartlettHanningHammingBlackman

Notes :
96
IX Analyse spectrale3 Influence de la fenêtre
• Fenêtres usuelles– Réponses fréquentielles (linéaire, dB)
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre rectangulaire
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Bartlett
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Hanning
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Hamming
0 0.2 0.4−80
−60
−40
−20
0
W d
B
Fenêtre de Blackman
0 0.1 0.20
0.2
0.4
0.6
0.8
1
|W| l
inea
ire
Fenêtre rectangulaire

Notes :
97
IX Analyse spectrale4 Paramètres de l'analyse
• Finesse en fréquence– Capacité de l'analyseur à détecter 2 raies proches
– Masquage fréquentiel
– Largeur du lobe principal : LLP = 2∆Ω
– Dépend de N et du type de fenêtreExemple sur transparent 9
• Finesse en amplitude– Capacité de l'analyseur à détecter des raies de faibles amplitudes ou
masquée par une autre raie proche
– Masquage d'amplitude ou bruit de l'analyse
λ = 20log|W(fs)/W(0)|
– Dépend du type de fenêtreExemple sur transparent 10

Notes :
98
IX Analyse spectrale4 Paramètres de l'analyse
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
0.5
1Spectre théorique
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5Spectre pour N=21
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5Spectre pour N=41
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5Spectre pour N=121
Fenêtre rectangulaire

Notes :
99
IX Analyse spectrale4 Paramètres de l'analyse
0.1 0.12 0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28 0.30
0.5
1Spectre théorique
0.1 0.12 0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28 0.30
0.5
1Spectre pour N=128, fenetre rectangulaire
0.1 0.12 0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28 0.30
0.2
0.4
0.6Spectre pour N=128, fenetre de Hamming
0.1 0.12 0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28 0.30
0.2
0.4
0.6Spectre pour N=256, fenetre de Hamming

Notes :
100
IX Analyse spectrale5 Zero-padding
– Ajout de L-N zéros à la suite de x(n) avant TFD sur L points
0 1 2 3 4 5 6 70
0.5
1
wr[n] (N=8 points)
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
5
10
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
5
10
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
5
10
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
5
10

Notes :
101
X. Systèmes multi-cadences
1. Définition
2. Décimation
3. Interpolation

Notes :
102
X Systèmes multi-cadences1 Définition
• Systèmes multi-cadences– Systèmes dans lesquels on pourra avoir plusieurs fréquences
d'échantillonnage dans une même chaîne de traitement
– Ils tirent partie de la forme spectrale d'un signal en gardant Fe
toujours à sa valeur optimale-> Réduction de la complexité
ωω0
1
−ω0
Xc(ω)
t
xc(t)

Notes :
103
X Systèmes multi-cadences1 Définition
t
x(nT)
T ωω0
1/T
−ω0
X(ejΩ)
π/T−π/T
t
xd(nT')
T' ω
1/T' Xd(ejΩ)
π/T'−π/T'

Notes :
104
X Systèmes multi-cadences2 Décimation
• Décimation d'un facteur M
– Pour éviter le recouvrement de spectre, le signal xc(t) doit être à
bande limitée et respecter le théorème de Shannon par rapport à T'
↓Mx(nT) xd(nT')
T' = MT
↓Mx(nT) xd(nT')
T' = MT
F'e = Fe/M
t t
∑−
=
−ΩΩ =
=1
0
)/2/( )(1
)(
)()(
M
i
MiMjj
d
d
eXM
eX
nMxnx
π
00
0
/'/(MT) = /T'
0)(
ωωππ
ωωω
≥=≥
≥=
MFeeFouet
pourX c

Notes :
105
• Filtres à décimation– Filtre suivi d'un décimateur
T' = MT
• Optimisation du filtre à décimation
X Systèmes multi-cadences2 Décimation
x(nT) Filtre Passe BasGain = 1
ΩΩΩΩc = ππππ/M↓M
v(nT) y(nT')
x(nT)T T T
b1
+
b2
+
b3
+
b0
↓2v(nT) y(nT')

Notes :
106
X Systèmes multi-cadences3 Interpolation
• Interpolation d'un facteur L– Objectif : augmenter la fréquence d'échantillonnage d'un signal x(n)
échantillonné à la période T d'un facteur L
• Elévateur de fréquence– Ajout de L-1 zéros entre 2 échantillons de x(n)
LTTavecnTxLnxnx ci /'),'()/()( ===
↑Lx(nT) xe(nT')
tt
)()(
)()(
0
...,2,,0),/()(
'
Ljj
e
TjTj
e
e
eXeX
eXeX
ailleurs
LLnLnxnx
ΩΩ =
=
±±=
=
ωω
Pas d'effet sur le spectre

Notes :
107
X Systèmes multi-cadences3 Interpolation
• Interpolateur– Succession d'un élévateur de fréquence et d'un filtre passe-bas idéal
de gain L, de période d'échantillonnage T' et de fréquence de coupure
Fc = 1/2T (i.e. Ωc = π/L).
ω
1/T X(ejΩ)
π/T−π/Tt
tω
1/T' Xe(ejΩ)
π/T−π/T π/T'−π/T'
↑Lx(nT) xe(nT') Filtre Passe Bas
Gain = LΩΩΩΩc = ππππ/L
xi(nT')

Notes :
108
X Systèmes multi-cadences3 Interpolation
• Optimisation du filtre à interpolation
• Multiplication de Fe par un facteur rationnel R=L/M– T' = T.M/L
x(nT)T T T
b1
+
b2
+
b3
+
b0
↑2v(nT')
y(nT')
↓My(nT')
↑Lx(nT) Filtre Passe Bas
Gain = LΩc = min(π/L, π/M)


















