Tracking Mobile Nodes Using RF Doppler Shifts
23
Tracking Mobile Nodes Using RF Doppler Shifts Branislav Kusy Branislav Kusy Computer Science Computer Science Department Department Stanford University Stanford University Akos Ledeczi, Xenofon Akos Ledeczi, Xenofon Koutsoukos Koutsoukos Institute for Software Integrated Institute for Software Integrated Systems Systems Vanderbilt University Vanderbilt University Published in Sensys 2007, Best Published in Sensys 2007, Best paper Award paper Award Presenter: ahey Presenter: ahey
description
Tracking Mobile Nodes Using RF Doppler Shifts. Akos Ledeczi, Xenofon Koutsoukos Institute for Software Integrated Systems Vanderbilt University. Branislav Kusy Computer Science Department Stanford University. Published in Sensys 2007, Best paper Award Presenter: ahey. Outline. - PowerPoint PPT Presentation
Transcript of Tracking Mobile Nodes Using RF Doppler Shifts

Tracking Mobile Nodes Using RF Doppler Shifts
Branislav KusyBranislav KusyComputer Science DepartmentComputer Science Department
Stanford UniversityStanford University
Akos Ledeczi, Xenofon KoutsoukosAkos Ledeczi, Xenofon KoutsoukosInstitute for Software Integrated SystemsInstitute for Software Integrated Systems
Vanderbilt UniversityVanderbilt University
Published in Sensys 2007, Best paper AwardPublished in Sensys 2007, Best paper Award
Presenter: aheyPresenter: ahey

Outline
• Problem Definition• Mechanism
• Doppler Effect• Tracking as optimization problem
• Implementation• Experimental Evaluation• Simulation Evaluation• Conclusion

Tracking Mobile Objects
Problem definition: keep track of location and velocity of “cooperating” moving objects continuously over time.

Doppler Effect
• Assume a mobile source transmits a signal with frequency f, and f’ is the frequency of received signal
f’ = f + Δf
Δf = - v / λf
v is relative speed of source and receiver
λf is wavelength of the
transmitted signalsource
Jose Wudka, physics.ucr.edu

Utilizing Doppler Effect
• Single receiver allows us to measure relative speed.• Given frequency(wavelength) of transmitted signal
• f = c/λf we can compute the relative speed v by measuring the received frequency f’
• If T is the traced node, Si is the anchor node, the above method can only determine to the relative speed v (projecting the velocity vector v on the TSi line), no bearings
• Multiple receivers allow us to calculate location and velocity of the tracked node.• By measuring sufficiently many relative speeds

Problems with resource constrained hardware:
• Not adequate for frequency domain analysis (takes 15 seconds to calculate 512-point FFT using 8MHz processor)
Can we Measure Doppler Shifts?
Typ. freq
Dopp. Shift (@ 1 m/s)
Acoustic signals 1-5 kHz 3-15 Hz
Radio signals (mica2)
433 MHz
1.3 Hz
Radio signals (telos)
2.4 GHz 8 Hz

• Time domain analysis requires relatively small signal frequency due to sampling rate limitations.
• Doppler shift is proportional to frequency of measured signal. It cannot be too small for enough accuracy.
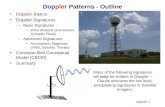
• Solution: Radio Interferometry
Can we Measure Doppler Shifts?

430MHz
430MHz+300Hz
Measuring Doppler shiftWe use radio interferometry to measure Doppler frequency shifts with 0.21 Hz accuracy.
T
Si
A
•2 nodes T, A transmit sine waves @430 MHz
fT, fA (let fT> fA)
•Node Si receives interference signal (in stationary case)
Signal freq: fs = (fT + fA)/2
Envelope freq: fi = fT – fA
•T is moving, fi is Doppler shifted
fi = fT – fA + Δfi,T
(one problem: we don’t know the value fT –fA accurately)
300Hz+ Δfi,T
Beat frequency is estimated using the RSSI signal.

TrackingUnknowns:• Location(x,y) of moving object T• Velocity(vx,vy) of T• f^=fT -fA
define a parameter vectorx=(x,y,vx,vy,f^)T
Knowns (constraints):• Locations (xi,yi) of nodes Si
• Doppler shifted frequencies fi
define an observation vectorc=(f1,…,fn) T
Function H(x)=c:
f4 = fT – fA + Δf4
= fT – fA + v4/λT
We want to calculate location and velocity of node T from the measured Doppler shifts.

Tracking as Optimization Problem
Non-linear system of equations!
• Tracked node T with velocity v transmits a signal.
• Sensor Si measures the Doppler shift of the signal which depends on vi, the relative speed of T and Si. fi = Hi(x) = f^ – vi /λt

Tracking as Optimization Problem
Non-linear Least Squares (NLS) •Minimize objective function ||H(x) – c||•Start with initial approximation x0 and iteratively
update this x until it converges to a local minimum of an objective function
Experiment:• 1 mobile transmitter• 8 nodes measure fi
Figure shows objective function for fixed (x,y) coordinates

Tracking as Optimization Problem
Constrained Non-linear Least Squares (CNLS)
•In tracking, constrain the area where the tracked node located
•Modify objective function by adding a barrier function, introduce positive penalty outside region of interest
Problems with NLS•Depending on starting point x0 and measurement
errors that corrupts c, it may fail.•Multiple local minima exist, need Constrained NLS•Global minimum is still not accurate (as large as 5.6m
location error)

State Estimation: Extended Kalman Filter
Extended Kalman Filter•Noise corrupted observations degrade performance of
CNLS
•Assume measurement error is Gaussian•Model dynamics of the tracked node (constant speed)•Update state based on new observations•KF prediction phase:
•EKF update phase:
•Accuracy improves, but maneuvers are a problem
:predicted new state: :previous state:F models system dynamics (state transition matrix)Q : process noise covarianceP : error covariance matrixKk: kalman gainR : measurement noise

Improving Accuracy
Experiment:• tracked node moves on
a line and then turns • KF requires 6 rounds to
converge back.
1 2
3
45 6

Resolving EKF Problems
Combine Least Squares and Kalman Filter•Run standard KF algorithm•Detect maneuvers of the tracked node•Update KF state with CNLS solution

Tracking Algorithm
Doppler shifted frequencies
Infrastructure nodes record Doppler shifted beat frequency.
Extended Kalman
filterLocation & Velocity
Calculate location and velocity using Kalman filter.
Non-linear least
squaresNLS Location & Velocity
Update EKF
Updated Location & Velocity
If maneuver is detected, calculate NLS solution and update EKF state.
Show location on the screen.
Maneuver
detectionYes
Run a simple maneuver detection algorithm. (Since velocity error is small, maneuver can be detected by speed estimate)
No
Location & Velocity

Implementation
17
• Platform• TinyOS • Mica2 mote (8MHz CPU, CC1000 Chipcon radio)
• Create Interference Signal• f^=fT –fA is unknown due to 4kHz errors at 400MHz
• Measuring Doppler Shiftsl• RSSI circuit applies a low pass filter, only beat frequency
(envelope of interference signal) is visible in RSSI signal• Apply a moving average filter to smooth incoming signal • Find all peaks in the filtered signal

Experimental Evaluation
18
Vanderbilt football stadium
• 50 x 30 m area• 9 infrastructure ExScal
nodes• 1 ExScal mote tracked • position fix in 1.5
seconds
• ExScal:Mica2 compatible motes enclosed in a weather-proof packaging
Non-maneuvering case

Experimental Evaluation
19
Vanderbilt football stadium
• 50 x 30 m area• 9 infrastructure ExScal
nodes• 1 ExScal mote tracked • position fix in 1.5
seconds
Maneuvering case
Only some of the tracks are shown for clarity.

Experimental Evaluation
20
• Non-maneuver case : error is normally distributed around mean error
• Maneuver case : frequent large errors due to Kalman filter diverging from the ground truth

Simulation Evaluation
21
• Experimental evaluation is limited due to its complexity and is also time consuming
• The parameters of the simulation engine are:1. 2D coordinates of infrastructure nodes Si
2. the track of the mobile node (a set of time-stamped 2D points)3. the wavelength λt of the transmitted signal4. σm standard deviation of the measurement noise5. σf standard deviation of the change of the interference frequency (f) for consecutive measurements6. the measurement update time tm
• For every measurement round, the location and the velocity of tracked node is recalculated based on track data, the relative speeds vi are calculated and converted to the frequencies fi.

Simulation Evaluation
22
In general,
1.adding more receivers2.limiting the maximumspeed of the tracked node3.increasing the temporal resolution of the collected data
help to improve the accuracy.

Conclusions
• Introduce a novel tracking algorithm that utilizes Doppler shift measurements only
• Doppler shifts can be accurately measured using radio interferometry
• Improve EKF performance in maneuvering case
• Evaluate the algorithm both experimentally and in simulation