
TRABAJO FINAL DE GRADO - upcommons.upc.edu²ria.pdf · Teniendo en cuenta que el diseño completo...
105
TRABAJO FINAL DE GRADO TÍTULO: Diseño de motor-generador de SRM-SRG mediante elementos finitos y Matlab/Simulink. AUTOR: Daniel Sánchez González TITULACIÓN: Grado en Ingeniería Eléctrica DIRECTOR: Balduí Blanqué Molina DEPARTAMENTO: Departamento de Ingeniería Eléctrica (DEE) FECHA: Julio 2013
Transcript of TRABAJO FINAL DE GRADO - upcommons.upc.edu²ria.pdf · Teniendo en cuenta que el diseño completo...

TRABAJO
FINAL DE GRADO
TÍTULO: Diseño de motor-generador de SRM-SRG mediante elementos finitos yMatlab/Simulink.
AUTOR: Daniel Sánchez González
TITULACIÓN: Grado en Ingeniería Eléctrica
DIRECTOR: Balduí Blanqué Molina
DEPARTAMENTO: Departamento de Ingeniería Eléctrica (DEE)
FECHA: Julio 2013


RESUMEN
En el proceso de diseño de cualquier maquina eléctrica, se debe de tener en cuenta aspectos de diferentes campos de la ingeniería. En el caso que se aborda en este proyecto, tratando los accionamientos de reluctancia autoconmutada SRM, se deben de tener en cuenta aspectos referentes a la electricidad, la electrónica, la mecánica y la regulación y control, siendo todos los aspectos de igual importancia para el correcto funcionamiento del accionamiento. En este proyecto se pretende presentar una metodología detallada que facilite el diseño completo del accionamiento con SRM, desde los requerimientos hasta el ajuste final y optimización del control necesario en la aplicación para la que ha sido concebido. Primeramente se realiza un estudio general sobre los accionamientos eléctricos y su principio de funcionamiento, así como del estado del arte de los mismos. Se propone la metodología de diseño que más tarde será validada. En la primera etapa de la metodología se exponen las principales variables y expresiones que dan forma a la geometría del motor, implementado una base de datos, para facilitar la tarea del cálculo a la hora de diseñar un nuevo accionamiento. Una vez generado el modelo geométrico más adecuado para el motor, se procede a realizar un estudio de las diferentes funciones y características de los controladores necesarios en este tipo de accionamientos. Para finalizar se realiza una explicación del sistema utilizado para efectuar la conversión de modo de funcionamiento tanto de motor como de generador. Se explican los programas de elementos finitos usados para implementar la estructura electromagnética calculada. Para validar la metodología de trabajo se diseña un motor desde el principio, a modo de ejemplo y posteriormente se ensaya el motor en diferentes entornos de trabajo a modo de comparación extrayendo de estos ensayos conclusiones que ilustran la utilidad del proyecto realizado.
Palabras clave:
SRM SRG Diseño Coupling to Simulink FLUX
Simulación Matlab/Simulink Generador Elementos Finitos accionamiento


ABSTRACT
The design process of any electrical machine, you should consider different aspects of engineering fields. In case of addressed in this project, talking about switching reluctance drives SRM, is required to consider issues relating to electricity, electronics, mechanics and the regulation and control, being all the aspects equally important for the correct operation of the drive. The aim of this project is to present a detailed methodology that facilitates the entire design with SRM drive, from requirements to the final adjustment and optimization of the necessary control in this application that it has been designed. Firstly, it is made a general study about electric drives and, its operation principle and also the state of art of this. It is proposed the design methodology and it will be validated later. In the first stage of the methodology there are exposed the main variables and expressions that such as the shape the geometry of the motor, implementing a database to facilitate the task of calculating the time of designing a new drive. After having generated the geometric model more suitable for the motor, it is proceed to conduct a study of the various functions and features of the necessary drivers in this type of drive. Finally there is an explanation about the used system to perform the mode conversion of both motor and generator. It is explained the finite elements programs used to implement the calculated electromagnetic structure. To validate the methodology of this task, it is designed a motor from the beginning and then it is tested in different working environments to compare and draw conclusions to justify the utility of the project done.
Key words:
SRM SRG Design Coupling to Simulink FLUX
Simulation Matlab/Simulink Generator Finite elements Drive motor


"El científico no tiene por objeto un resultado inmediato. Él no espera que sus ideas
avanzadas sean fácilmente aceptadas. Su deber es sentar las bases para aquellos que
están por venir, y señalar el camino".
NIKOLA TESLA
Agradecimientos.
Llegado este punto, querría agradecer a todas las personas que me han acompañado en el
camino:
A mi madre, por su cariño incondicional, dando tanto sin pedir nada a cambio.
A mi padre, por demostrarme en innumerables ocasiones, que sin esfuerzo nunca se obtiene
recompensa.
A mi hermana, por ser la pequeña alegría de mi casa.
A Miryam, por apoyarme siempre en mis decisiones y ser un apoyo moral en situaciones
difíciles.
A Rubén y Víctor, por acompañarme a lo largo de la carrera con momentos buenos y menos
buenos.
A Pedro y Jonathan, por hacer que esos días de simulaciones y redactados sean menos
aburridos.
A Balduí, por su esfuerzo y dedicación que ha gastado ofreciéndonos su ayuda.
Al departamento de ingeniería eléctrica, por ayudarnos en todo lo que hemos necesitado.
Y en definitiva, a todo aquel que se pueda haber cruzado en mi camino en este tiempo y me
haya hecho sentir más feliz.


ÍNDICE
Justificación .............................................................................................. 15
Objetivos .................................................................................................. 17
Metodología ............................................................................................. 19
Estructura ................................................................................................. 21
1.-Introducción a los motores y generadores de reluctancia
autoconmutada ........................................................................................ 23
1.1.-Motor de reluctancia autoconmutada (SRM). ............................................................................... 23
1.1.1.-Descripcion general del accionamiento. ...................................................................................... 23
1.1.3.-Estructura electromagnética ....................................................................................................... 24
1.1.4.-Convertidores estáticos de potencia. .......................................................................................... 26
1.1.5.-Detectores de posición. ............................................................................................................... 31
1.2.- Principio de funcionamiento. ....................................................................................................... 31
1.3.- Producción de par. ....................................................................................................................... 32
1.3.1.- Motor no saturado. ..................................................................................................................... 33
1.3.2.- Motor saturado. .......................................................................................................................... 35
1.4.- Característica par-velocidad. ........................................................................................................ 37
1.5.- Ventajas e inconvenientes de la utilización de accionamientos SRM. .......................................... 39
1.6.- Funcionamiento en zona motora y generadora............................................................................ 41
2.-Diseño de los accionamientos con SRM. .............................................. 45
2.1. Consideraciones a la hora de realizar el diseño de un motor SRM................................................. 45
2.2.2.- Influencia del número de polos. ................................................................................................. 45
2.2.3.- Influencia del entrehierro y recomendaciones. .......................................................................... 45
2.2.4.- Influencia del número de espiras y recomendaciones. .............................................................. 46
2.2.5.- Influencia de los ángulos polares estatóricos y rotóricos y recomendaciones. .......................... 47
2.2.6.- Influencia del yugo estatórico y rotórico, y recomendaciones. .................................................. 47
2.2.6.- Influencia en la elección del material magnético y recomendaciones. ...................................... 48
2.4.1. Parámetros a introducir. .............................................................................................................. 55

3.-Control. ................................................................................................ 61
3.1. Contenido. .................................................................................................................................... 61
3.1.- Angulo de disparo. ....................................................................................................................... 61
3.2.- Angulo de conducción. ................................................................................................................. 61
3.3.- Intensidad de referencia. ............................................................................................................. 62
3.4.- Control del accionamiento. .......................................................................................................... 62
3.4.1.- Control de pulso único. ............................................................................................................... 62
3.4.2.- Control de histéresis. .................................................................................................................. 62
3.4.3.- Control PWM. ............................................................................................................................. 62
3.5.- Estrategias de conmutación. ........................................................................................................ 62
3.5.1- Soft Choping. ................................................................................................................................ 63
3.5.2- Hard Choping. .............................................................................................................................. 63
3.6.- Consideraciones de diseño del controlador. ................................................................................ 63
3.7.- Control Simulink para Motor/Generador. .................................................................................... 64
3.7.1.- Bloque de regulación de corriente y control del convertidor. .................................................... 65
3.7.2.- Bloque de valor de resistencias. ................................................................................................. 67
3.7.3.- Bloque adaptador de señales. .................................................................................................... 68
3.7.4.- Bloque parámetros de FLUX. ...................................................................................................... 69
3.7.5.- Bloque de visualización de medidas instantáneas. ..................................................................... 70
3.7.6.- Bloque de medidas por workspace. ............................................................................................ 71
4.-Software de simulación. ....................................................................... 73
4.1.1. Análisis estático. .......................................................................................................................... 75
4.1.2. Análisis dinámico (Coupling). ...................................................................................................... 75
4.4.1. Comparación entre “look up tables” y Coupling to Simulink. ...................................................... 77
4.4.2.- Estudio de la solapación de dos fases. ........................................................................................ 80
4.4.3. Estudio de la solapación de tres fases ......................................................................................... 82
4.4.4. Estudio del flujo en la corona del estator cuando hay dos fases conduciendo. .......................... 84
4.4.5 Comparación Coupling y motor real ............................................................................................. 86
5.-Caso de estudio. ................................................................................... 89
5.1.- Proceso de diseño. ....................................................................................................................... 89
5.2.- Ensayos en zona motora. ............................................................................................................. 93
5.3.- Ensayos en zona generadora. ....................................................................................................... 96
6. Presupuesto ....................................................................................... 101

7.-Conclusiones. ..................................................................................... 103
8.-Futuras líneas de trabajo. ................................................................... 105
9.-Bibliografia. ........................................................................................ 107
Anexo A: Tutorial Flux 10 ....................................................................... 109
Creación de la Infinite Box ................................................................................................................. 118
Creación de regiones ......................................................................................................................... 120
Creación de la malla ........................................................................................................................... 123
Definición del proyecto como aplicación magneto estatica. .............................................................. 129
Creación de los materiales ................................................................................................................. 130
Descripción de cada una de las regiones. ........................................................................................... 134
Definición de Mechanical Sets. .......................................................................................................... 138
Creación del circuito del estator ........................................................................................................ 142
SIMULACION PARA LA OBTENCIÓN DE CURVAS DE COMPORTAMIENTO ESTÁTICO. .......................... 146
Obtención curva par............................................................................................................................. 148
Obtención curva flujo concatenado ..................................................................................................... 150
Exportación de curvas a Excel .............................................................................................................. 153
SIMULACIÓN PARA LA OBTENCION DE CURVAS EN MOVIMIENTO MEDIANTE “COUPLING TO
SIMULINK” ......................................................................................................................................... 155
Anexo B: Programas utilizados. .............................................................. 175


Justificación 15
Justificación
La idea de este proyecto nace por la necesidad de tener un espacio de trabajo intuitivo y
rápido para diseñar accionamientos con reluctancia autoconmutada (SRM), permitiendo su
validación funcionando tanto en modo motor como en modo generador (SRG).
Teniendo en cuenta que el diseño completo de un SRM es un trabajo complejo y
multidisciplinar debido a la gran cantidad de variables y conceptos a considerar en su uso, el
espacio de trabajo está compuesto por varias herramientas de difícil utilización. Se pretende
mejorar una serie de herramientas ya constituidas y crear nuevas para finalmente validar el
sistema de diseño propuesto y contribuir a facilitar la tarea de aprendizaje en este tipo de
accionamientos, teniendo en cuenta que la formación de ingenieros en este ámbito es costosa
en tiempo.
Se pretende prestar especial atención al diseño geométrico del motor, generando una base de
datos constituida a partir de la literatura existente y otros proyectos similares, que permita la
evaluación y validación en diferentes entornos de simulación, usando diferentes programas
de métodos numéricos o de elementos finitos, en los que se realizarán ensayos orientados a la
generación eléctrica.


Objetivos 17
Objetivos
El principal objetivo de este proyecto es el estudio y diseño de los accionamientos SRM,
orientados a la generación eléctrica SRG. También se tiene como objetivo la validación del
sistema mediante simulación interactiva.
Para la realización de este proyecto se definen diferentes objetivos:
· Estudio del principio de funcionamiento de los accionamientos SRM y la composición de los
mismos.
·Estudio de los diferentes métodos de control existentes para los accionamientos SRM
· Estudio del estado del arte de los accionamientos SRM
·Realización de una base de datos capaz de realizar los principales cálculos para crear la
geometría del motor.
·Utilización de programas de elementos finitos, tales como FLUX o FEMM, para la realización
de los cálculos electromagnéticos.
·Diseño de un motor SRM con configuración polar 8/6.
·Validar el sistema mediante los diferentes métodos de simulación comparándolos entre ellos.
·Mejorar esquemas de control existentes para la simulación orientándonos en la generación
eléctrica SRG.


Metodología 19
Metodología
Con el fin de cumplir con los objetivos del proyecto establecidos, se ha decidido crear unas
líneas de trabajo, las cuales funcionan de forma secuencial.
La primera línea de trabajo es la búsqueda de información. Esta búsqueda de información se
ha basado primeramente en el estudio del principio de funcionamiento de los accionamientos
SRM. También se ha estudiado el estado del arte y los componentes de los mismos.
Una vez adquiridos los conocimientos de principio de funcionamiento y teniendo en cuenta
todos los elementos de los cuales se compone un accionamiento SRM, se procede a realizar el
estudio del diseño geométrico del motor. Para este estudio se ha tenido en cuenta diferentes
proyectos y estudios realizados por el departamento GAECE (Grupo de Accionamientos
Eléctricos con Conmutación Electrónica) de la “Universitat Politecnica de Catalunya”.
Una vez estudiado el método de diseño y recogidas las recomendaciones para el mismo, se ha
decidido mejorar una base de datos con el programa “Microsoft Office Excel” para la
realización de diferentes diseños de SRM de manera rápida e intuitiva, siendo únicamente
necesario tener los requerimientos de funcionamiento del motor y seguir las recomendaciones
guiadas durante este proyecto.
Seguidamente se ha estudiado el funcionamiento del software de elementos finitos, tanto
FLUX como FEMM. En esta etapa se realizará un tutorial para la utilización de FLUX debido a la
complejidad de este y para continuar con la filosofía del departamento, la cual es que un
proyecto anterior sirva para mejoras en un proyecto futuro.
Para continuar con el estudio del accionamiento SRM y la utilización de las herramientas para
la realización del proyecto, se han estudiado los diferentes métodos de control, y
conjuntamente en los modelos creados por anteriores proyectistas en el programa Matlab en
el entorno Simulink, se han observado los comportamientos con los diferentes modos de
control. Una vez finalizada la etapa de estudio, se ha procedido al diseño completo de un
accionamiento SRM, empezando desde los requerimientos de funcionamiento del motor hasta
la simulación y validación del mismo. Para ello se ha utilizado primeramente la base de datos
mejorada, una vez finalizado el cálculo se ha utilizado una herramienta de dibujo (AutoCAD)
para la realización de la geometría del motor. Posteriormente esta geometría ha sido
importada al software de elementos finitos, donde se han especificados los materiales y las
características del motor. Una vez se ha tenido finalizada la estructura electromagnética del
motor, se han utilizado varias técnicas de simulación.
El motivo de la utilización de varias técnicas de simulación, ha sido la comparación entre la
simulación clásica llevada a cabo en anteriores proyectos llamada “Look up tables” y la
simulación interactiva con “Coupling to Simulink”. Una vez finalizadas las comparaciones, se ha
utilizado un tipo de control existente pero mejorado para la generación eléctrica.
Finalizado el proceso, se llevan a cabo las conclusiones obtenidas después del trabajo
realizado.


Estructura 21
Estructura
Capítulo 1.- Introducción a los accionamientos SRM.
En este capítulo se realizará una breve introducción en el funcionamiento del motor y todos
sus componentes a los cuales se referirán los capítulos posteriores. También se dará a conocer
el estado de arte de los mismos, justificando el porqué de la línea de trabajo escogida. Se
describe la metodología de diseño de motores adoptada en el trabajo, explicando todas las
partes que la componen, permitiendo conceptualizar cada una de las herramientas usadas
para este propósito.
Capítulo 2.- Diseño del motor SRM.
En este apartado se expone, el procedimiento de diseño, las ecuaciones necesarias y las
recomendaciones recopiladas de la literatura existente, también se describe el funcionamiento
de la base de datos realizada. Este capítulo tiene el fin de ilustrar paso a paso el diseño del
motor y explicar la herramienta utilizada para el diseño del mismo.
Capítulo 3.- Técnicas de control.
En este apartado se explicaran los diferentes tipos de control que podemos aplicar al
accionamiento. Este estudio en profundidad de los diferentes modos de control, nos ayudará a
la hora de escoger el convertidor y el modo de funcionamiento del mismo.
Capítulo 4.- Herramientas utilizadas.
En este apartado se explicará el trabajo realizado con los programas de elementos finitos
utilizados FLUX y FEMM. Se realizará una comparación entre los diferentes programas viendo
las ventajas e inconvenientes de cada uno. Se proponen diferentes alternativas de uso de FLUX
en régimen dinámico con “Coupling to Simulink” y en estático mediante el uso de “look up
tables”. Este último modo de funcionamiento ha sido usado clásicamente por otros
proyectistas del mismo departamento y se contrasta con las nuevas aportaciones.
Capítulo 5.- Caso de estudio.
En este capítulo se realizara el diseño la validación de un accionamiento SRM utilizando todas
las herramientas. El diseño se realizara partiendo de unos requerimientos y se continuara el
proceso hasta obtener los resultados. Una vez obtenidos los resultados de las simulaciones se
podrán comparar con los resultados del modelo físico experimental que es igual al simulado, el
cual está instalado en el departamento de investigación GAECE.

22 Estructura
Capítulo 6.- Conclusiones.
En este apartado se explicaran todas las conclusiones que se han obtenido a lo largo del
proyecto.
Capítulo 7.- Futuras líneas de trabajo.
Se explicarán trabajos realizados paralelamente al desarrollo del PFG, que pueden llegar a ser
de interés para nuevas formas de trabajo y posibles proyectos a llevar a cabo.

1.-Introducción a los motores y generadores de reluctancia autoconmutada 23
1.-Introducción a los motores y generadores de reluctancia
autoconmutada
En este capítulo se realizará una breve introducción en el funcionamiento del motor y todos sus componentes, también se dará a conocer el estado de arte de los mismos. El propósito del capítulo es dar una vista general de lo que existe y como funciona para facilitar la comprensión de los siguientes capítulos.
1.1.-Motor de reluctancia autoconmutada (SRM).
1.1.1.-Descripcion general del accionamiento.
El motor de reluctancia autoconmutada (Switched Reluctance Motor) de ahora en adelante
SRM, es un motor de corriente continua sin escobillas constituido por un rotor y un estator,
ambos con polos salientes construidos mediante el apilamiento de chapas de material
electromagnético. La excitación del motor se produce a través de unos enrollamientos
dispuestos en las ranuras del estator diametralmente opuestas. Siendo el número de espiras,
el número de vueltas que se da al enrollamiento en el polo estatórico. De manera que si se
crea una diferencia de potencial en bornes de una fase, circulara una corriente, generando en
el enrollamiento un flujo magnético que atraerá el polo saliente rotórico más cercano,
intentando reducir la reluctancia creada por el aire y aumentando la inductancia, haciéndolo
girar a medida que vamos conmutando las siguientes fases.
El esquema del accionamiento será el siguiente:
Figura 1.1- Esquema del accionamiento SRM

24 1.-Introducción a los motores y generadores de reluctancia autoconmutada
Figura 1.2- Motor SRM 12/8 de 3 fases
La constitución del accionamiento SRM no se contempla solamente con el motor, este necesita
un control para poder conmutar las fases, sabiendo el controlador en cada momento la
posición del rotor, haciendo-lo girar en el sentido deseado.
1.1.3.-Estructura electromagnética
Las configuraciones del SRM dependen del número de polos salientes tanto en el estator como
en el rotor, el nombre de las diferentes configuraciones se determina de la manera siguiente:
(Ns/Nr). Donde Ns es el número de polos en el estator y Nr es el número de polos en el rotor. La
relación de polos tiene que ser la siguiente:
[1.1] ( ) [1.2]
Dónde:
m=número de fases del motor.
k=coeficiente de multiplicidad (2k representa los polos de cada fase).
En definitiva se puede observar que el nombre de polos en el estator influye en las fases que
tendrá el motor. De esta manera también influirá en el número de interruptores, que habrá en
el convertidor estático de potencia.
El ángulo de paso de giro del rotor se encontrara con la siguiente expresión:
[1.3]
Entonces el número de pasos que tendrá que dar el rotor para completar una revolución será:
[1.4]

1.-Introducción a los motores y generadores de reluctancia autoconmutada 25
La frecuencia a la que podrán trabajar los interruptores se expresa de la manera siguiente:
[1.5]
Dónde:
N= es la velocidad en rpm o min-1
Es recomendable para no tener grandes frecuencias de conmutación ni tener aparatos
demasiado sofisticados que el número de polos del rotor sean inferiores a los del estator. Las
configuraciones más habituales, que garantizan el arranque y la reversibilidad del sentido de
giro del motor, son las siguientes:
Motor SRM 6/4. 3 fases Motor SRM 8/6. 4 fases Motor SRM 12/8. 3 fases
Figura 1.3- Estructuras magnéticas SRM más habituales.
Como observamos no se contemplan configuraciones con menos de 3 fases, esto es debido a
que para garantizar el arranque sea cual sea la posición del rotor y también la reversibilidad de
giro del rotor, se requieren como mínimo 3 fases.
A partir de ahora y en todo el documento, hablaremos de dos posiciones importantes de este
motor. Estas son posición alineada y desalineada.
La posición alineada es cuando el polo estatórico y el polo rotórico están encarados, siendo la
inductancia máxima y la reluctancia mínima. La posición la podemos ver en la siguiente figura:
Figura 1.4(a)- Posición alineada

26 1.-Introducción a los motores y generadores de reluctancia autoconmutada
La posición no alineada es cuando el polo rotórico no está alineado con ningún polo estatórico,
en esta posición la reluctancia es máxima y la inductancia es mínima. Se puede observar esta
posición en la siguiente figura:
Figura 1.4 (b)- posición no alineada
1.1.4.-Convertidores estáticos de potencia.
El convertidor estático es el encargado, a través de las señales que recibe del controlador, de
generar la señal adecuada para controlar el motor.
El funcionamiento del convertidor estático de potencia se basa en abrir y cerrar los
interruptores, en el orden que le indique el controlador, el cual sabe en todo momento cual es
la posición del rotor, la conmutación entre fases dependerá de la velocidad a la que tenga que
ir el motor. Los interruptores utilizados en estas aplicaciones dependiendo de la potencia que
tienen que subministrar, para potencias inferiores a 1kW se utilizaran MOSFET’s y para
potencias superiores son más utilizados los IGBT’s
Otra función que tiene encargada es la de garantizar la rápida desmagnetización de las fases
del motor, haciendo que el campo magnético generado en los polos de la fase que deja de
conducir, dejen de existir y así evitar de producir un par en el sentido contrario al que
queremos que gire el rotor.

1.-Introducción a los motores y generadores de reluctancia autoconmutada 27
Existen diferentes tipos de convertidores, dependiendo de sus modos de operación y las
características del accionamiento a utilizar, pero los convertidores más habituales son: el
convertidor Miller, el convertidor unipolar y el convertidor clásico.
Figura 1.5(a): Convertidor clásico
Fase
A
VDC
0V
Fase
B
Fase
C
DA DB DC
IA IB IC
RA RB RC
Figura 1.5 (b): Convertidor unipolar
DAI
D IA
Fase
A
VDC
0V
Fase
B
Fase
C
DB
IB
DC
IC
Figura 1.5(c): Convertidor Miller
Todos los convertidores tienen sus ventajas y desventajas respecto a los otros. Podemos
contemplar diferencias significativas por ejemplo en el convertidor clásico es necesario tener
acceso a las 2 partes de la bobina de cada fase, en cambio en los otros 2 convertidores

28 1.-Introducción a los motores y generadores de reluctancia autoconmutada
solamente hace falta tener acceso a un punto común de las fases. También puede ser un
aspecto negativo el hecho que en el convertidor clásico tiene que tener más interruptores y
eso implica un aumento en el precio del convertidor, pero será una ventaja si observamos que
el hecho de tener más interruptores el control es mayor.
En el convertidor clásico podemos observar que tendremos 5 estados diferentes dependiendo
de la posición de sus interruptores. Los 5 estados se describen seguidamente. Para la
explicación de cada uno de los estados observaremos una sola fase y simplificaremos el
esquema utilizando interruptores convencionales en lugar de interruptores de estado sólido
representados con la letra “I” y diodos representados con la letra “D”:
1.-El primer estado seria con todos los interruptores de estado sólido y los diodos no conducen
por lo tanto es como si todos los elementos estuvieran como interruptores convencionales
abiertos. La tensión que encontraremos en el bus será de 0V. En este estado se encontrara
esta fase, cuando el motor este parado o esté otra fase en funcionamiento.
Figura 1.6(a): Esquema simplificado por fase del convertidor clásico. Estado 1
2.- En el segundo estado conducen los dos interruptores de estado sólido alimentando de esta
manera la fase del motor. El valor de la tensión en este caso será VDC.
Figura 1.6(b): Esquema simplificado por fase del convertidor clásico. Estado 2

1.-Introducción a los motores y generadores de reluctancia autoconmutada 29
3.- En el tercer estado se cierra el interruptor de estado sólido inferior y conducen el
interruptor de estado sólido superior y el diodo, cortocircuitando el circuito y provocando que
la energía almacenada en la bobina de la fase del motor se disipa en forma de calor. A este
estado se le llama fase de libre circulación. La tensión de fase será 0V.
Figura 1.6(c): Esquema simplificado por fase del convertidor clásico. Estado 3
4.- En este estado conducen el interruptor de estado sólido y el diodo complementarios al
estado anterior
Figura 1.6(d): Esquema simplificado por fase del convertidor clásico. Estado 4

30 1.-Introducción a los motores y generadores de reluctancia autoconmutada
5.- En este estado los interruptores de estado sólido están abiertos y solamente conducen los
diodos. La corriente toma el sentido en la misma dirección que en el estado 2 por lo tanto la
energía almacenada en la bobina vuelve a la fuente de alimentación y la tensión en la fase será
de -VDC.
Figura 1.6(e): Esquema simplificado por fase del convertidor clásico. Estado 5
Ventajas del convertidor Clásico:
-Es posible alimentarlo con corriente continua, o con corriente alterna a través de un
rectificador trifásico no controlado y un filtro.
-Es posible aplicar sobre las bobinas una tensión positiva, negativa o nula.
-Gran tolerancia a las faltas
-Independencia entre las fases
-Multitud de posibilidades sobre el control.
Desventajas del convertidor Clásico:
-Requiere un número elevado de interruptores de estado sólido.
-Requiere un número elevado de floating gate driver
- Cada fase del SRM tiene que soportar la tensión de la fuente de tensión menos la caída de
tensión que se produce en los interruptores de estado sólido, por lo tanto en aplicaciones
donde la fuente de alimentación tiene una tensión baja se reduce la tensión aplicada en
bornes de la fase.

1.-Introducción a los motores y generadores de reluctancia autoconmutada 31
1.1.5.-Detectores de posición.
Como se ha dicho anteriormente el funcionamiento de este motor se debe a la conmutación
de las fases según la posición del rotor comparado con la del estator. Para saber cuándo hay
que activar una fase u otra utilizaremos los detectores de posición. Dependiendo de la
aplicación de nuestro dispositivo podremos escoger entre diferentes tipos de detectores. Para
aplicaciones en las cuales necesitemos mucha precisión utilizaremos encoders o resolvers. En
el caso que no se necesite tanta precisión podremos utilizar 3 opto interruptores fijos a la
carcasa del estator, asociados a su vez a un disco ranurado girando solidario al eje del rotor.
Encoder incremental Detalle de opto interruptor con disco ranurado para un SRM 6/8
Figura 1.7: Imágenes de detectores de posición.
1.2.- Principio de funcionamiento.
Como se ha descrito anteriormente el giro del motor se produce, debido a que los polos
rotóricos van en busca de la mínima reluctancia y por lo tanto la máxima inductancia. De esta
manera para que se produzca el giro completo del rotor únicamente se tendrán que activar las
fases del estator en la secuencia correcta.
Normalmente el inicio de conducción de cada fase coincide cuando el polo del rotor está cerca
de la posición de máxima reluctancia, y la conducción de esta fase se mantendrá un
determinado ángulo de paso ( ).
El ángulo recorrido por el rotor después de activar todas las fases se le denomina ciclo rotórico
y viene dado por la siguiente expresión:
[1.6]

32 1.-Introducción a los motores y generadores de reluctancia autoconmutada
Figura 1.8: Evolución inductancia idealizada, ángulo de paso, corriente y tensión de fase.
1.3.- Producción de par.
Primero tenemos que tener en cuenta la ecuación por fase del motor SRM:
[1.7]
Siendo:
V= Tensión de fase
Rf= Resistencia de fase
I= Corriente
ψ= Flujo concatenado

1.-Introducción a los motores y generadores de reluctancia autoconmutada 33
También debemos de familiarizarnos con el concepto de saturación. Este efecto se manifiesta
en los materiales magnéticos, por encima del nivel de saturación por mucho que aumentemos
el campo magnético no variará la inducción del material. Esto se puede comprobar en la
gráfica de cualquier material electromagnético donde vemos que la función a medida que
avanza el campo magnético (H), la inducción aumenta asintóticamente hasta encontrarse con
la inducción de saturación.
Figura 1.9: Ejemplo de curva de magnetización y punto de saturación.
1.3.1.- Motor no saturado.
Considerando que la chapa del motor no está en saturación, podremos decir que la
inductancia no depende de la corriente que traspasa la bobina y entonces tendremos el flujo
concatenado:
[1.8] Dónde:
θ es la posición rotórica.
Menospreciando la caída de tensión en la resistencia del estator y asumiendo linealidad
magnética, la ecuación principal seria:
[1.9]
De esta manera tenemos que la tensión del estator es una tensión proporcional a la derivada
de la corriente que traspasa la bobina respecto al tiempo y una fuerza contra electromotriz
proporcional al producto de la velocidad y la corriente.
Para obtener la potencia del motor, solamente tendremos que multiplicar por la corriente.

34 1.-Introducción a los motores y generadores de reluctancia autoconmutada
[1.10]
Reescribiendo la ecuación obtenemos:
( )
[1.11]
Con esta expresión podemos comprobar que la potencia absorbida está compuesta por 2
componentes la primera es la referente a la energía almacenada en el motor en forma de
campo magnético y la siguiente es la potencia mecánica del motor asociada a la fuerza
electromotriz.
Por lo tanto si tenemos el término anterior como potencia mecánica y lo asociamos a la
expresión que determina la potencia mecánica interna del motor tenemos que:
( )
[1.12]
Y comprobamos la ecuación que determina la potencia mecánica interna del motor:
[1.13]
Podemos decir que el par viene dado por la siguiente expresión:
( )
[1.14]

1.-Introducción a los motores y generadores de reluctancia autoconmutada 35
De estas expresiones podemos extraer las siguientes conclusiones:
- El par se produce por la tendencia del circuito magnético a adoptar la posición con la
mayor inductancia posible
- El par será pulsante e independiente del sentido de la corriente
- Se generara par motor (en el mismo sentido del movimiento) o de frenado (contrario
al sentido del movimiento) dependiendo de la secuencia de conmutación de las fases.
Figura 1.9: Evolución inductancia y el par según el ángulo de paso del motor.
1.3.2.- Motor saturado.
Como se ha descrito anteriormente, el efecto de la saturación magnética provoca que no
exista linealidad magnética en el material. Por ello vamos a ver la no linealidad de la
inductancia y la relación inversa de esta con la corriente. Este hecho se produce por la
saturación del circuito magnético. Lo podemos observar en las curvas de flujo concatenado.
Figura 1.10: Evolución inductancia y el par según el ángulo de paso del motor a diferentes corrientes

36 1.-Introducción a los motores y generadores de reluctancia autoconmutada
Figura 1.11: Evolución del flujo concatenado según la corriente y diferentes posiciones.
A partir de las curvas de flujo concatenado también podemos identificar un término que nos
ayudara en la evaluación del comportamiento del motor, como es el par medio [TOR02].
El par medio proporcionado al eje será directamente proporcional al área W (también llamado
ciclo de conversión de la energía), como podremos apreciar en la siguiente figura, y su
expresión es la siguiente:
[1.15]
Figura 1.12: Ciclo de conversión de energía.

1.-Introducción a los motores y generadores de reluctancia autoconmutada 37
Esta área representa la cantidad de energía mecánica que aporta el motor cada stroke
(desplazamiento del motor provocado cada vez que se produce el cambio en la conmutación
de fases).
Existen diferentes alternativas para la obtención de un par mayor, consiguiendo una mejor
relación entre la inductancia máxima y mínima:
-Fuertes saturaciones en el motor para posiciones alineadas (utilizando materiales con mayor
inducción de saturación)
-Elevadas pendientes en la zona lineal para el flujo concatenado en la posición alineada
(materiales con mayor permeabilidad relativa en la zona lineal (de no saturación) de la curva
de magnetización)
-Reduciendo la pendiente del flujo concatenado en la posición de no alineamiento (Variando la
estructura electromagnética del motor).
1.4.- Característica par-velocidad.
Teniendo en cuenta las ecuaciones anteriores, podremos encontrar la característica par-
velocidad de los motores SRM y ver las posibilidades que tenemos de controlarla. Antes
haremos una hipótesis del comportamiento del sistema:
- Maquina no saturada.
- Resistencia de fase despreciable.
- Caída de tensión en los interruptores de estado sólido del controlador negligible.
- Corriente idealizada de forma rectangular durante el ángulo de conducción θc(una
tercera parte del ciclo rotórico τ)
Figura 1.13: Evolución real e ideal de la corriente durante un ángulo de conducción Θc.

38 1.-Introducción a los motores y generadores de reluctancia autoconmutada
A partir de la ecuación de fase de motor y de las hipótesis realizadas, tendremos que:
[1.16]
Dónde:
[1.17]
Para calcular el par medio del motor, lo realizaremos de la siguiente manera:
∫
∫
∫
[1.18]
Siendo la corriente eficaz:
√
∫
√
√
[1.19]
Por lo tanto la ecuación del par medio quedaría:
(
)
[1.20]
De esta expresión podemos extraer la conclusión que la característica par-velocidad de un
accionamiento SRM se dividirá en 3 partes, en la siguiente figura se pueden observar las 3
etapas y los controles de estas zonas:
Figura 1.14: Característica par-velocidad de un accionamiento SRM

1.-Introducción a los motores y generadores de reluctancia autoconmutada 39
1.- Zona de par constante.
En esta zona podemos trabajar con un margen de velocidades y el par siempre será constante,
la máxima velocidad que se puede alcanzar en esta zona, con la tensión de alimentación
máxima, es la velocidad base (wb). A velocidades muy bajas podemos obtener un incremento
del par, manteniendo la tensión constante e incrementando la corriente, como consecuencia
del bajo valor de las perdidas en el hierro (Marcado en la gráfica con una línea discontinua).
Las expresiones de esta zona son:
[1.21]
[1.22]
[1.23]
2.- Zona de potencia constante.
Entre wb y wv trabajaremos a potencia constante incrementando el ángulo de conducción (con
un valor máximo recomendado del 0,5·τ=θc). Las ecuaciones para esta zona son:
( ) [1.24]
[1.25]
[1.26]
3.- Característica natural.
Sobrepasando la velocidad wv no es posible controlar el motor y este seguirá su característica
natural. Las expresiones de la característica natural serán:
[1.27]
[1.28]
1.5.- Ventajas e inconvenientes de la utilización de accionamientos SRM.
Analizando, las ventajas y los inconvenientes de la utilización de los motores SRM [AND04]:
Ventajas
- Construcción mecánica sencilla y robusta.

40 1.-Introducción a los motores y generadores de reluctancia autoconmutada
- Bobinados estatóricos concentrados.
- La ausencia de bobinados e imanes rotóricos hace que tenga una baja inercia y pueda
alcanzar grandes velocidades.
- La mayoría de pérdidas se producen en el estator esto hace que sea fácil de refrigerar
y no existan problemas por trabajar a altas temperaturas.
- El par es independiente del sentido de la corriente, esto permite que se pueden
eliminar interruptores de estado sólido en ciertas aplicaciones.
- La mayoría de controladores utilizados con SRM son tolerantes con las faltas.
- En caso de falta el circuito está abierto y las corrientes de cortocircuito son bajas.
- Elevado rendimiento, buena relación par/volumen y par/inercia.
- Característica par-velocidad adaptable dependiendo de la aplicación.
Inconvenientes
- Requiere un número elevado de terminales y conexiones.
- El par motor muestra un rizado de par, esto es por la naturaleza pulsante del control.
- Es un accionamiento ruidoso.
- La estructura electromagnética necesita alimentarse a través de un convertidor y
necesita controladores de posición y reguladores electrónicos.
- Complejo proceso de diseño.
- Necesaria una excitación.

1.-Introducción a los motores y generadores de reluctancia autoconmutada 41
1.6.- Funcionamiento en zona motora y generadora.
Como se ha explicado anteriormente, el accionamiento en forma motora SRM, trabaja
buscando la máxima inductancia y mínima reluctancia, con esto, y observando la fórmula de la
obtención del par, podemos ver que lo idóneo es disparar la fase desde el punto de no
alineamiento hasta el punto de máximo alineamiento, ya que en la gráfica de inductancia
según la posición rotórica la pendiente de la inductancia es positiva.
Figura 1.15: Gráfica de inductancia idealizada para una fase y recomendación del disparo de la fase para la zona motora
girando el motor en sentido horario.
La fórmula de obtención de par del motor SRM:
( )
[1.14]
Por lo tanto el par será positivo y funcionará como motor. Y podemos comprobar cómo el
sentido de la corriente por la fase es irrelevante. Analíticamente, podemos comprobar que, a
mayor ángulo de inicio, mayor es el valor de la inductancia, y por lo tanto, mayor es el valor de
la constante de tiempo eléctrica de la fase, debido a que esta constante de tiempo sigue la
siguiente expresión:
[1.29]
Esto se traduce en que para alcanzar el mismo valor de corriente el tiempo que debe
transcurrir es mayor, lo que no es posible debido a la desactivación de la fase. Indirectamente,
otro aspecto que afecta al valor de la corriente es la velocidad de rotación del motor, ya que la
fuerza electromotriz (e) del motor es directamente proporcional al valor de la velocidad
[DEL12].
[1.30]

42 1.-Introducción a los motores y generadores de reluctancia autoconmutada
Y el valor de tensión de alimentación del motor será constante, ya que proviene de la batería,
a medida que la velocidad del motor vaya en aumento, la intensidad del mismo decrecerá y a
su vez el par también.
Figura 1.16: Demostración del efecto de la velocidad en la corriente del motor en la zona motora.
La gráfica del accionamiento SRM en el modo de funcionamiento en modo motor es similar a
la siguiente:
Figura 1.17: Gráfica de corriente y par para un SRM en modo motor.
La forma de esta gráfica variara dependiendo de la apertura de los ángulos de disparo, de la
velocidad que lleve el motor y de la carga que este arrastrando.
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 750
5
10
15
20
25
30
Posición (Deg)
Corr
iente
de f
ases (
A)
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75-0.5
0
0.5
1
1.5
2
2.5
3
3.5
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D

1.-Introducción a los motores y generadores de reluctancia autoconmutada 43
Para el modo de funcionamiento del accionamiento como generador (SRG), la fase tendrá que
entrar en acción en el intervalo desde la parte de alineamiento total hasta la zona de no
alineamiento, variando la amplitud de ángulos dependiendo de la potencia que queramos
absorber. Esta regulación se realizara teniendo en cuenta la batería de la que disponemos y su
voltaje nominal. Este intervalo de disparo de la fase también lo podemos observar en la gráfica
idealizada de la inductancia para una fase, donde este intervalo abarca la pendiente negativa
de la inductancia.
Figura 1.18: Gráfica de inductancia idealizada para una fase y recomendación del disparo de la fase para la zona generadora
girando el motor en sentido horario.
Como se ha observado anteriormente en el funcionamiento en zona motora, el valor de la
inductancia, en el punto donde el polo del rotor con el polo de estator están alineados, es
máxima, mientras que en el punto de no alineamiento la inductancia es mínima. Si se desea
generar, en algunos casos es interesante realizar el disparo antes de que rotor y estator estén
completamente alineados, porque esto implicará que la bobina cargue corriente más rápido
puesto que la constante de tiempo eléctrica es más grande.
La gráfica del accionamiento SRM en el modo de funcionamiento en modo generador es
similar a la siguiente:
Figura 1.19: Gráfica corriente y para para un accionamiento SRM en modo generador.
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 1350
10
20
30
40
50
Posición (Deg)
Corr
iente
de f
ases (
A)
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 135-8
-7
-6
-5
-4
-3
-2
-1
0
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D


2.-Diseño de los accionamientos con SRM 45
2.-Diseño de los accionamientos con SRM.
En este apartado se expone, el procedimiento de diseño, las ecuaciones necesarias y las
recomendaciones recopiladas de la literatura existente, también se describe el funcionamiento
de la base de datos realizada. Este capítulo tiene el fin de ilustrar paso a paso el diseño del
motor y explicar la herramienta utilizada para el diseño del mismo.
2.1. Consideraciones a la hora de realizar el diseño de un motor SRM.
2.2.2.- Influencia del número de polos.
Es sabido que la influencia del número de polos [TOR02] [KRI01]. El número de polos (NS/NR)
del motor de SRM va directamente relacionado con el número de interruptores que deberá de
contener su controlador. Por esta razón si se produce un aumento del número de polos
también aumentara el coste del convertidor, se dificultara el montaje del motor sobre todo en
el momento de insertar las bobinas en el estator e incrementaremos las perdidas den el hierro
debido al aumento de la longitud del circuito magnético. Por contraposición podemos observar
que el aumento de los polos hace que se reduzca el rizado de par, un problema común en los
motores SRM.
2.2.3.- Influencia del entrehierro y recomendaciones.
A la hora de decidir la longitud del entrehierro del motor debemos de tener en cuenta que al
aumentar el entrehierro disminuimos el par del motor y de su relación con la corriente, esto
significa que para alcanzar un mismo nivel de par necesitaremos una corriente más elevada.
Habitualmente como valor de experiencia podemos decir que las máquinas de pequeña
potencia tienen un entrehierro que oscila desde 0,18mm a 0,25mm mientras que en máquinas
de mediana y gran potencia tienen un entrehierro entre 0,3mm y 0,5mm [KRI01]. Con un
entrehierro pequeño aumentara el rendimiento y también aumentara el rizado de par. Se debe
de tener en cuenta que no es posible hacer el entrehierro muy pequeño porque dificultarían
aspectos constructivos y mecánicos.

46 2.-Diseño de los accionamientos con SRM.
2.2.4.- Influencia del número de espiras y recomendaciones.
Utilizar un número elevado de espiras (Np) provoca un aumento del par y una mejora en la
relación par/corriente.
Dependiendo de la aplicación del motor se puede saber las condiciones de trabajo de este y el
tipo de refrigeración que tendrá, con estas premisas se escogerá el tipo de motor.
Normalmente en los motores de pequeña potencia se utiliza hilo de cobre esmaltado mientras
que en mediana y gran potencia se utilizan pletinas de cobre esmaltadas lo que hace que se
puedan mantener corrientes elevadas y que la disposición de las bobinas no sea tan
problemático al quedar completamente encajadas y no desaprovechar espacio en la ventana.
Con el hilo de cobre esmaltado existe una superficie desaprovechada debido a la sección
redonda del conductor, como se puede apreciar en la siguiente figura:
Figura 2.1: Optimización de espacio con pletina y con hilo de cobre.
El aprovechamiento del espacio en la ventana lo podemos medir como se muestra en el
siguiente ejemplo:
Figura 2.2: Ejemplo de ventana con un solo conductor.

2.-Diseño de los accionamientos con SRM 47
[2.1]
[2.2]
[2. 3]
[2.4]
Este coeficiente de aprovechamiento seria si el conductor ocupara todo el espacio disponible
pero debido al proceso de fabricación del bobinado no se puede llegar a ocupar todo el
espacio, por ello se aplica el coeficiente de ventana (Cu) que oscila entre el 40 y 60%.
2.2.5.- Influencia de los ángulos polares estatóricos y rotóricos y recomendaciones.
Para la mejora del par y la relación del par con la corriente y el rendimiento, podemos
aumentar el ángulo polar rotórico (βR) un valor ligeramente superior al del estator. Esto se
produce debido a que aumenta las relaciones de inductancia máxima y mínima que se dan en
la posición alineada y desalineada respectivamente.
En el caso que de utilizar ángulos polares rotóricos pequeños o que se incrementen los dos a la
vez provocara un aumento del consumo de corriente y posible dificultad en el arranque y la
reversibilidad. También provocara la disminución del área de ventana para la ubicación de las
bobinas y dificultara la capacidad de albergar las bobinas. Los valores recomendados para las
diferentes estructuras son:
NS/NR m βR βS
6/4 3 30ᵒ 32ᵒ
8/6 4 21ᵒ 23ᵒ
12/8 3 15ᵒ 16ᵒ
Tabla 2.1: Recomendaciones de ángulos polares estatóricos y rotóricos.
2.2.6.- Influencia del yugo estatórico y rotórico, y recomendaciones.
La modificación de los yugos del estator y del rotor a partir de ciertos niveles puede dar
problemas. En el caso de disminuir el yugo de cualquiera de los 2 provocara que exista una
sobre saturación en esa parte del circuito comparado con otras partes del circuito magnético.
En el caso de aumentar demasiado el yugo del estator provocara que el área ventana para la
colocación de bobinas disminuya. A parte, es bueno saber que a partir de determinado valor
de los yugos, no se produce ninguna mejora en agrandar-los.

48 2.-Diseño de los accionamientos con SRM.
La recomendación de la medida del yugo del estator, teniendo en cuenta la robustez mecánica
y la minimización del ruido debido a las vibraciones estará en el intervalo de [KRI01]:
[2.5]
El yugo del rotor vendrá determinado por un intervalo que favorezca en los valores más altos
de inductancia máxima y mínima, y que debido a su tamaño la largada de los polos sean
menores para disminuir las vibraciones, este intervalo será [KRI01]:
[2.6]
2.2.6.- Influencia en la elección del material magnético y recomendaciones.
La inducción de saturación y la permeabilidad relativa producen una mejora en el par, la
relación del par con la corriente y el rendimiento. La curva de inducción de cualquier material
será parecida a la siguiente:
Figura 2.3: Curva característica del material ferromagnético.
La elección del material ferromagnético de la chapa es un compromiso a la hora de diseñar y
se ha de escoger teniendo en cuenta las cualidades de la chapa y el precio de la misma.
En aplicaciones de máquinas rotativas se suele utilizar acero con silicio o acero eléctrico no
orientado que a diferencia del orientado tiene propiedades magnéticas isotrópicas es decir
iguales en todas las direcciones. Y en máquinas rotativas la dirección del flujo magnético no es
rectilínea.
La construcción del rotor o del estator está compuesta de varias láminas. Cada lamina puede
medir desde 0,35mm hasta 0,65mm (según el estándar europeo EN 10106, 2007).
Para saber las características de las chapas magnéticas nos tenemos que fijar en el nombre
comercial que tienen, debido a que utilizan una nomenclatura específica que es la siguiente:

2.-Diseño de los accionamientos con SRM 49
Por ejemplo nos encontramos con una chapa cuyo nombre comercial es M600-50A, podemos
decir por la primera cifra (600) que se trata de un material que tiene 6W/kg de pérdidas en el
hierro a una inducción de 1,8T y frecuencia de 50Hz. Por la segunda cifra sabemos el grosor del
material (50) en este caso tendrá un grosor de 50mm. El valor de pérdidas en el hierro, en el
caso del diseño de un motor SRM no sería útil debido a que se alimentan a corriente continua.
2.3. Procedimiento del diseño de un accionamiento SRM.
EL proceso del diseño de un motor SRM se iniciara, conociendo la aplicación exacta en la que
se va a utilizar dicho motor. Se deben de conocer datos dimensionales, como la longitud y el
diámetro del motor, de esta manera podremos. Para conocer la longitud del motor deberemos
conocer el emplazamiento del motor para conocer con certeza la medida de la carcasa.
Teniendo en cuenta la medida de la carcasa podremos decir que esta carcasa será
aproximadamente 2 veces la longitud del paquete de chapas (Longitud real del motor (L)).
Esto es debido a que se tienen que tener en cuenta las cabezas de bobina, que son a su vez la
vuelta que da la bobina y sobresalen del rotor. Esto lo podemos apreciar en el siguiente
esquema.
Figura 2.4: Sección longitudinal de un motor SRM.
Otro dato del dimensionamiento del motor es el diámetro exterior del rotor (Dee).
Las características nominales del motor es un dato importante para realizar el diseño. Estas
serán la potencia útil del motor (Pu), la velocidad con esta potencia (ω) la tensión a la que
alimentaremos el motor (V) que esto vendrá determinado por la batería que utilicemos y el
rendimiento (η).
El siguiente paso que se debe de determinar es la configuración polar del motor, asignando
número de polos de estator y de rotor (NS/NR). También según esta configuración sabremos el
número de fases del motor.

50 2.-Diseño de los accionamientos con SRM.
Siguiendo estos pasos y las recomendaciones [AND05] podremos determinar el diámetro
exterior del rotor (D) con la referencia del diámetro exterior del estator (Dee) y su
configuración polar, con los coeficientes que observamos en la siguiente tabla:
Configuración polar Dee/D
6/4 0,5
8/6 0,53
12/8 0,57
Tabla 2.2: Recomendaciones de relación entre Dee y D.
Cuando tenemos el valor del diámetro exterior del rotor podremos conocer un dato que nos
dará la información de un parámetro de óptimo diseño (λ).
[2.7]
El valor óptimo de λ debe de ser:
[2.8]
Para continuar con el diseño del motor realizaremos el cálculo del coeficiente de utilización del
motor (C). Este coeficiente es la relación del par que obtenido del motor, entre el volumen
rotórico del mismo.
[
] [2.9]
En el caso de un motor de rotor interior el volumen del rotor vendrá definido por la siguiente
expresión:
[ ] [2.11]
Y el par del motor será tal que:
[ ]
[2.12]

2.-Diseño de los accionamientos con SRM 51
Con este dato, se podrá extraer mediante una tabla de recomendación la aplicación del motor
[MILL93].
Tabla 2.3: Valores del coeficiente de utilización (C) y sus aplicaciones.
Con esta comprobación podremos decidir si las medidas de nuestro motor son idóneas para
nuestra aplicación. Si esta todo correcto procederemos a la elección el material
electromagnético del cual se conformara el estator y el rotor. Para la determinación de este
material cogeremos del material que escojamos la inducción máxima de saturación por un
polo (Bps), el coeficiente de apilamiento (kfe) y también la densidad del material utilizado para
después poder calcular el peso total de nuestro motor.
La longitud del entrehierro se determinara con la siguiente expresión:
[2.13]
Por lo tanto sabiendo el valor del diámetro exterior del rotor (D) y el entrehierro ( ), sabemos
el diámetro del entrehierro del estator (D’).
[2.14]
En la elección de los ángulos polares estatóricos βs y rotóricos βs podemos optar por las
recomendaciones adquiridas por experiencia, como hemos explicado anteriormente:
NS/NR m βR βS
6/4 3 30ᵒ 32ᵒ
8/6 4 21ᵒ 23ᵒ
12/8 3 15ᵒ 16ᵒ Tabla 2.1: Recomendaciones de ángulos polares estatóricos y rotóricos.
Pero existen unas expresiones para definirlos [AND05]:
Siendo la siguiente para la determinación del ángulo polar estatórico:
[ ]
[2.15]
Aplicación C (kNm/m3)
Pequeños motores totalmente cerrados 2,5-7
Motores industriales 7-30
Servomotores 15-50
Motores para aplicaciones aeroespaciales 30-75
Grandes motores con refrigeración liquida 100-250

52 2.-Diseño de los accionamientos con SRM.
Por lo tanto la anchura del polo estatórico será:
( ) (
)
[2.16]
Y el ángulo polar rotórico:
[( ) (
)
] [ ]
[2.17]
Y la anchura del polo rotórico se obtendrá:
(
)
[2.18]
En la determinación de los yugos del estator (YS) y del rotor (YR) se utilizaran las siguientes
expresiones:
( )
[2.19]
( )
[2.20]
El diámetro del eje vendrá determinado por las características de prestaciones del motor:
√
[2.21]
Donde la potencia deberá de ser en vatios (W) y la velocidad angular en radianes por segundo
(rads/s), las unidades del resultado del diámetro del eje, serán en milímetros (mm).
Para finalizar la construcción geométrica se calculara la largada de los polos del estator (LPS) y
del rotor (LPR), que vienen determinados por la siguiente expresión:
( )
[2.22]
( )
[2.23]

2.-Diseño de los accionamientos con SRM 53
A continuación se calculará las especificaciones del bobinado de alimentación del motor.
Se empezara calculando el número de espiras por polo (NP), con la siguiente expresión:
[2.24]
Estando la longitud del paquete de chapas del motor (L) en metros.
Sabiendo el número de espiras por polo (NP), podremos saber el número de espiras por fase
(NF):
[2.25]
La sección del conductor se calculara sabiendo el valor de corriente en valor RMS (iRMS) que
circulara por él, y de la estimación de una densidad de corriente (Δ) extraída según las
condiciones de trabajo y refrigeración del motor a diseñar, las estimaciones las extraeremos de
la siguiente tabla:
Método de refrigeración Δ (A/mm2)
Motores cerrados sin ventilador 4,7-5,4
TEFC 7,8-10,9
Ventilador exterior 14-15,5
Refrigeración liquida 23,3-31
Tabla 2.4: Valores de densidad de corriente según la refrigeración.
El valor de la corriente lo podemos extraer de la siguiente expresión:
√
[2.26]
Una vez tenemos la corriente y la densidad de corriente, podremos calcular la sección
necesaria del conductor del bobinado:
[2.27]
Si se utiliza un conductor de cobre esmaltado el diámetro de ese conductor se calculara de la
manera siguiente:
√
[2.28]

54 2.-Diseño de los accionamientos con SRM.
A la hora de la elección del conductor para el bobinado, se seleccionara el conductor con
diámetro inmediatamente superior al calculado anteriormente. Por lo tanto la nueva sección
de nuestro conductor será:
[2.29]
A continuación, es importante asegurarse de la cabida del bobinado (área cobre (ACU) en el
espacio disponible en el estator (también llamado área ventana (AV)). Esta relación se
denomina coeficiente de utilización de ventana (Cu%). La relación entre ellas debe de tener un
valor razonable y con hilos de cobre esmaltados no conviene superar el 40%.
[2.30]
Siendo el área de cobre:
[2.31]
Y el área ventana:
( )
[
( )
]
[2.32]
Dónde:
[2.33]
Siendo Die el diámetro interior del estator.
También podremos calcular la resistencia del enrollamiento a una determinada temperatura
(θ):
( )
[2.34]
Donde la resistividad (ρ) tiene un valor, dependiendo de la temperatura de funcionamiento
(θ), tal que:
[2.35]
Siendo el valor de la resistividad a 20ᵒ:
[2.36]

2.-Diseño de los accionamientos con SRM 55
2.4. Base de datos para el diseño de SRM.
La realización del diseño se basa primeramente en saber para qué aplicación en concreto
estará destinado el motor. Sabido esto tendremos los datos principales para realizar el diseño.
En este apartado se explicara la base de datos realizada, que está destinada a que el cálculo de
diseño sea semiautomático.
2.4.1. Parámetros a introducir.
Abriendo la hoja de cálculo, tendremos que clicar sobre la primera pestaña, llamada
“Parámetros de diseño”
Figura 2.5: Pestaña de parámetros de diseño.
Seguidamente deberemos de rellenar todas las celdas que están con fondo blanco con el valor
requerido. Se comienza, introduciendo las características nominales del motor. Son datos que
deben de conocerse para realizar el diseño del motor sabiendo la aplicación final del motor.
Figura 2.6: Características nominales del motor.
El valor del rendimiento será una estimación del rendimiento que queremos que acabe
teniendo finalmente. Para continuar se introducirán los datos referentes a la geometría que
querremos que tenga nuestro motor.
Figura 2.7: Geometría del motor.

56 2.-Diseño de los accionamientos con SRM.
En esta parte se comenzará escribiendo que configuración polar tiene el motor, y de cuantas
fases es. Seguidamente se deberán de escribir tanto el diámetro exterior del motor como la
longitud del paquete de chapas. Después de esto deberemos de ver si la hoja da por optimo el
diseño. Esta validación la realiza mediante la expresión [2.8] del apartado anterior. Para saber
si el diseño es óptimo o no, miraremos la casilla de “Validación de óptimo diseño”.
Figura 2.8: Comprobación de diseño óptimo.
Figura 2.9: Comprobación de diseño no óptimo.
Para continuar rellenando los parámetros que nos faltan de la geometría tendremos que mirar
los recuadros que quedan a la derecha de la hoja de cálculo. Son unas tablas recogidas de las
recomendaciones que se han explicado en el apartado anterior.
Figura 2.10: Recomendaciones sobre la geometría del motor.
Para finalizar el apartado de la geometría del motor, deberemos de escoger la aplicación de
nuestro motor dependiendo de su coeficiente de utilización, la expresión [2.9] del apartado
anterior. El escoger la aplicación se realizará mediante el desplegable que aparece en la hoja.
Figura 2.11: Desplegable de aplicación del motor.

2.-Diseño de los accionamientos con SRM 57
Para comprobar que la aplicación escogida es la correcta deberemos de comprobar que en el
recuadro que queda a la derecha del desplegable aparece “Correcto”
Figura 2.12: Comprobación de aplicación correcta.
Los siguientes parámetros que debemos de introducir son los que hacen referencia al tipo de
chapa electromagnética.
Figura 2.13: Parámetros de la chapa electromagnética.
A continuación se introducirán los valores del bobinado.
Figura 2.14: Parámetros del bobinado.
Para introducir el diámetro normalizado deberemos de observar el valor de la casilla anterior
“Diámetro conductor cobre esmaltado, por calculo (dc)” e introduciremos el valor normalizado
inmediatamente superior. El valor del coeficiente de utilización debe de ser inferior al 40% tal
y como se especifica en las recomendaciones vistas en los apartados anteriores.

58 2.-Diseño de los accionamientos con SRM.
Para las distancias A y B deberemos de tener el dibujo de la geometría dibujado y mediante
esa herramienta de dibujo comprobar esas distancias.
Figura 2.15: Medidas de A y B.
Con la medida de A y B deberemos de comprobar la validación de la ocupación de las bobinas.
Esto lo podremos comprobar en la siguiente casilla.
Figura 2.16: Validación de la ocupación de las bobinas.
El último apartado para completar es para rellenar datos sobre características dimensionales
del motor, con el fin de saber el peso del mismo.
Figura 2.17: Parámetros dimensionales del motor.
Lo único a rellenar es la densidad del cobre y el volumen de la chapa electromagnética. Para
saber el volumen de la chapa electromagnética se deberán de sumar las superficies del estator
y del rotor, para después multiplicar por la longitud del paquete de chapas.

2.-Diseño de los accionamientos con SRM 59
Una vez introducidos todos los parámetros nos dirigiremos a la siguiente pestaña llamada
“Dimensiones geométricas”.
Figura 2.18: Pestaña de dimensiones geométricas.
En esta pestaña encontraremos todos los datos necesarios para dibujar nuestra estructura.
Figura 2.19: Parámetros necesarios para el dibujo de la estructura.
Al lado de la tabla podremos ver un dibujo representativo acotado de un SRM 8/6 para poder
observar las medidas obtenidas en la tabla.


3.-Control 61
3.-Control.
3.1. Contenido.
Como hemos hablado en capítulos anteriores el control es necesario en este tipo de
accionamientos. En los diferentes controles se hablará de ángulo de disparo (θd), ángulo de
conducción (θc), intensidad de referencia (Iref) [TOR02]. Se pueden apreciar todas estas
variables en la siguiente figura:
Figura 3.1: Variables de control en un control de corriente.
3.1.- Angulo de disparo.
Este ángulo controlará el momento que abrirán los interruptores de estado sólido de nuestro
convertidor.
Si utilizamos el control de pulso único, el inicio de la conducción en la posición no alineada
presenta mayor relación par-velocidad y generalmente un mayor rendimiento. Adelantar el
inicio de la conducción permite obtener pares más elevados con la misma velocidad y
podremos trabajar a mayores velocidades. En el caso que retrasemos el inicio de la conducción
disminuiremos el rizado de par.
Si utilizamos el control por histéresis y retrasamos el inicio de la conducción conseguiremos
una mejora en el par y ligeramente aumentara el rendimiento.
3.2.- Angulo de conducción.
Con pulso único y siendo el valor de ángulo de conducción igual al ángulo de paso (ε) que nos
dará la geometría del motor, tendremos una mejor relación par-corriente.

62 3.-Control.
Para un ángulo de conducción muy pequeño aumentaremos el rizado de par y si aumentamos
por encima del ángulo de paso lo disminuiremos. Siempre sin sobrepasar el valor de ángulo de
paso, siendo este θC ≤ ε.
Trabajando con el control por histéresis el incremento del ángulo de conducción producirá un
aumento del par y disminuirá el rizado de este, hay que tener en cuenta que se cumpla θC ≤ ε,
como en el caso de pulso único.
3.3.- Intensidad de referencia.
Par y rendimiento aumentaran cuanto más grande sea esta intensidad. Hay que tener en
cuenta que el aumento de esta referencia hará que se caliente el motor y que existan
condiciones de sobresaturación que no soportara el material ferromagnético.
3.4.- Control del accionamiento.
Existen diferentes maneras de controlar este accionamiento en las dos primeras zonas de la
curva par-velocidad antes mencionadas. Dependiendo de la forma de onda que se envía a los
interruptores de estado sólido, podremos distinguir entre los 3 tipos de control más utilizados:
3.4.1.- Control de pulso único.
En este tipo de control se mantiene constante el pulso de conducción de cada fase durante
todo el ángulo de conducción. Normalmente se utiliza un ángulo de conducción igual al ángulo
de paso del motor, también podríamos obtener un funcionamiento a potencia constante
variando este ángulo. En el caso que no modifiquemos el ángulo de paso obtendríamos la
característica natural del SRM.
3.4.2.- Control de histéresis.
El control por histéresis se basa en coger un valor de corriente fijo, llamado referencia, en
función del par constante al que queramos hacer trabajar al motor. El error o diferencia
obtenido de la comparación se introduce dentro de un regulador de histéresis que tiene un
margen de máximo y mínimo de error fijado previamente, y de aquí se obtiene la señal de
control óptimo.
3.4.3.- Control PWM.
El modulador de ancho de pulsos (Pulse Width Modulation en inglés) se utiliza para trabajar en
par constante, en este caso, el valor del error lo obtenemos de la comparación del valor de
referencia de corriente real se compara con una señal triangular. Esta señal marca la
frecuencia de conmutación de los interruptores. El resultado de la comparación son las señales
de apertura y de cierre de los interruptores de estado sólido del controlador.
3.5.- Estrategias de conmutación.
El modo de giro del motor se obtiene con la conmutación de cada fase dependiendo de la
posición del rotor en cada momento, pero la manera de mantener la intensidad para obtener

3.-Control 63
el par deseado en cada momento se tiene que obtener troceando la intensidad para
mantenerla en una banda de histéresis prefijada. Los métodos de troceado son [BLA07] :
3.5.1- Soft Choping.
El método del soft choping o “conmutación unipolar” consiste en abrir y cerrar los
interruptores superiores para cada fase en función de si se necesita más o menos corriente en
dicha fase. Tomando la función de un troceador. Mientras que los interruptores inferiores
únicamente son utilizados para la conmutación. Esta estrategia de conmutación no debe de
ser implementada mientras el modo de funcionamiento del accionamiento sea el modo
generador debido a que siguiendo esta estrategia de conmutación la energía se disipa en
forma de calor a través de la resistencia del motor.
3.5.2- Hard Choping.
El hard choping o conmutación bipolar consiste en abrir y cerrar los interruptores superiores e
inferiores a la vez. Respondiendo a la señal de regulación de corriente y conmutación de fases
ambos interruptores. Este método de conmutación es el indicado para utilizar con velocidades
bajas debido a que el trabajo de los interruptores es bastante elevado. Este método de
conmutación únicamente se puede utilizar con convertidores que tengan 2 interruptores de
estado sólido en la misma rama.
3.6.- Consideraciones de diseño del controlador. Para realizar un control sobre el motor para que actúe tanto en la forma motora como en la
forma generadora se deben de tener en cuenta diferentes aspectos.
- El controlador debe permitir una alimentación reversible, para hacer posible tanto la
alimentación de energía del motor, como la absorción de energía del mismo.
- Para que se pueda almacenar y alimentar a la vez el convertidor debe de contener
elementos de almacenamiento de energía. Estos elementos pueden ser tanto baterías
como baterías de condensadores. Siempre teniendo en cuenta que la tensión de estos
elementos de almacenamiento deben de tener la misma tensión de alimentación del
motor.
- Para el funcionamiento como generador, previamente se deben de magnetizar las
fases y para ello se debe de inyectar corriente sobre ellas, por ello es necesario contar
con algún elemento con carga que sea capaz de llevar a cabo la operación de
magnetización.

64 3.-Control.
3.7.- Control Simulink para Motor/Generador.
Para la realización del control en Matlab/Simulink se han recopilado otros controles ya
utilizados por anteriores proyectistas [DEL10] [CAS11]. Una vez consultados sus modos de
funcionamiento, se ha creado un esquema que permita la conversión del motor a generador.
En este apartado se explicarán las principales funciones del control.
Figura 3.4: Esquema controlador para modos motor y generador.
A continuación se realizara una explicación detallada de cada bloque, para una mayor
comprensión del sistema.

3.-Control 65
3.7.1.- Bloque de regulación de corriente y control del convertidor.
En este bloque se realiza el control del motor, recibiendo las señales de velocidad del mismo y
la intensidad de las fases. Las salidas son las aperturas de los interruptores superiores (Gup) e
inferiores (Gdwn).
Figura 3.5: Bloque de regulación de corriente y control del convertidor.
En el interior del bloque se puede observar el controlador de lógica de ángulo y el bloque de
regulación de corriente por histéresis.
Figura 3.6: Interior del bloque de regulación de corriente y control del convertidor.
Si observamos la entrada al bloque de generación de lógica de ángulo de disparo, se puede
observar que al entrar la velocidad tenemos un bloque que provoca un retraso de la señal,
esto es para hacer posible el comienzo del cálculo ya que no puede ser todo instantáneo.
También se observa un cambio de unidad de rpm a rad·s-1.

66 3.-Control.
El bloque de generación lógica del ángulo de disparo es el encargado de primeramente hacer
la conversión, mediante una integral, de la velocidad del motor a la posición del motor.
Figura 3.6: Interior del bloque de regulación de corriente y control del convertidor.
Como únicamente tenemos una señal de velocidad, y debemos de tener una lógica de ángulo
diferente para cada fase, en la integral se colocan tantas condiciones iniciales como fases
tenga nuestro motor. El valor de las condiciones iniciales de la integral vendrá dado según la
geometría de nuestro motor. Por ejemplo en un motor SRM 8/6 tendremos 3 fases, el stroke
de una fase son 60ᵒ desde que este alineada hasta que se vuelva a alinear por lo tanto su
stroke será 60/4, por lo tanto será 15ᵒ. Las condiciones iniciales entonces serán aquellas que
siguiendo la el movimiento del motor, ya sea horario o anti horario y dependiendo del nombre
de nuestras fases desde 0 hasta 45ᵒ. Siendo el caso, que el rotor gire en sentido anti horario la
secuencia de fases debe de ser en sentido horario siendo esta A,B,C,D, las condiciones iniciales
serán en el mismo orden de las fases: [0 -15 -30 -45], de esta manera sabremos que están
retrasadas 15ᵒ una respecto a la siguiente. Después de la integral tenemos un modulador, este
modulador sirve para acotar las señales de posición de 0ᵒ a 60ᵒ, ya que es el ciclo que siempre
se va a repetir en un SRM 8/6. Estas señales cuando salen del modulador entran en el bloque
donde se define el ángulo de disparo, a este bloque también entran las señales de on y off que
serán introducidas por nosotros en otro bloque, en el interior se generará la comparación
entre los ángulos y se determinará qué fase debe de estar activa en cada momento.
Volviendo al principio al bloque de regulación de histéresis le vienen 2 señales, una la de la
corriente de fases y otra un valor de intensidad de referencia fijado por nosotros. En el interior
mediante un comparador por histéresis realiza la medida para cada fase y manda la señal
cuando la intensidad de la fase supera la de referencia.
Figura 3.7: Regulación de corriente por histéresis.

3.-Control 67
El bloque de control del convertidor es el encargado de procesar las señales provenientes del
controlador de histéresis y del de lógica de ángulo para las aperturas de los interruptores Gup
y Gdown.
3.7.2.- Bloque de valor de resistencias.
Este bloque es el encargado de dar el valor de la resistencia teniendo en cuenta la señal que
proviene del controlador.
Figura 3.8: Bloque de valor de resistencias.
Este bloque actúa como el convertidor clásico utilizado para accionamientos SRM, pero en
lugar de dar la señal de apertura y cierre de interruptores, funciona dándole valores a unas
resistencias colocadas en el circuito eléctrico creado en el entorno ElectriFlux de Flux.
Cuando el valor de la resistencia es muy alto no conducirá corriente, por lo tanto actuará
como un interruptor abierto, al contrario si el valor de la resistencia es pequeño conducirá
corriente y por lo tanto será un interruptor cerrado. El valor de estas resistencias será un valor
añadido por nosotros en otra sección.

68 3.-Control.
La señal de Gup y Gdwn llegará a un selector que será el encargado de realizar la conmutación
de abierto o cerrado.
Figura 3.9: Selectores de los interruptores inferiores.
Las salidas con el valor de las resistencias serán introducidas directamente al bloque de Flux.
3.7.3.- Bloque adaptador de señales.
De la salida del bloque de coupling to Simulink de FLUX se extraerán varias variables definidas
en su interior, que serán introducidas tal y como se explica en el anexo A. Estas señales se
repartirán con un mux, que están en el interior del bloque de adaptador de señales.
Figura 3.10: Bloque adaptador de señales.

3.-Control 69
3.7.4.- Bloque parámetros de FLUX.
En este bloque se introducirán los parámetros principales para controlar el motor.
Figura 3.11: Bloque parámetros FLUX.
EN el interior de este bloque primeramente podemos ver los valores de las resistencias para el
estado ON y OFF del interruptor, como se ha comentado anteriormente, para el estado ON
debe de ser un valor pequeño y para el estado OFF un valor alto de la resistencia.
También encontraremos un bloque que es el encargado de alimentar con tensión nuestro
motor, y el valor de intensidad de referencia para realizar el control de corriente por histéresis.
Finalmente encontraremos el bloque encargado de hacer que el motor funcione como motor
(SRM) o como generador (SRG).
Figura 3.12: Controlador del modo de funcionamiento.
Para la selección del modo de funcionamiento del accionamiento es necesario clicar sobre el
switch de la parte inferior.

70 3.-Control.
La selección de los ángulos de on y off para un modo y otro se debe de realizar en el bloque de
ángulos de disparo, donde haciendo doble click aparecerá una pantalla como la que se puede
observar en la figura 3.13
Figura 3.13: Ventana de selección de ángulos.
3.7.5.- Bloque de visualización de medidas instantáneas.
En el interior de este bloque se pueden observar las diferentes medidas obtenidas
instantáneamente por el motor.
Figura 3.14: Bloque de visualización de medidas instantáneas.

3.-Control 71
3.7.6.- Bloque de medidas por workspace.
Este bloque ha sido creado para facilitar la obtención de las gráficas de diferentes medidas del
accionamiento.
Figura 3.15: Bloque de visualización de medidas por workspace.


4.-Software de simulación 73
4.-Software de simulación.
El cálculo electromagnético de un SRM es un proceso complejo y largo. Al tratarse de una
disciplina multidisciplinar, para el diseño de cualquier accionamiento motor es necesario tener
en cuenta variables tanto eléctricas, como mecánicas, como térmicas, etc. La utilización de
software para la simulación interactiva aúne los diferentes campos y es posible trabajar con
ellos paralelamente para llegar a una solución y reducir tiempo y costes.
Esta reducción de tiempo se consigue debido a que con el sistema clásico de diseño las
diferentes tareas que componen el proceso de fabricación de los accionamientos se realizan
de una manera secuencial, (investigación, análisis, prototipado, etc.) por lo tanto si la tarea
anterior aún no ha finalizado no puede comenzar la siguiente. En cambio, en la ingeniería
concurrente las diferentes tareas que componen el proceso de fabricación se realizan al mismo
tiempo gracias a la simulación interactiva.
4.1. Elementos Finitos FEA.
Los programas de elementos finitos (FEA), permiten aproximar una solución numérica a partir
de un estructura o dominio, sobre el cual existen definidas unas ecuaciones diferenciales en
forma débil o integral, que caracterizan el comportamiento físico del problema, dividiéndolo
en un número elevado de subdominios llamados elementos finitos.
Una vez creado el conjunto de elementos finitos, realiza una partición del dominio, llamada
discretización. Dentro de cada elemento se haya una serie de puntos llamados nodos. Dos
nodos pertenecen al mismo elemento finito si son adyacentes. También, si un nodo esta sobre
la frontera de un elemento finito puede pertenecer a diversos elementos. El conjunto de todos
los nodos recibe el nombre de malla
La malla sirve de base para la discretización del dominio en elementos finitos, y los cálculos
son realizados sobre ella. La generación de la malla se realiza en una etapa previa a los
cálculos. De acuerdo con las relaciones entre nodos se relaciona el valor de un conjunto de
variables incógnitas definidas en cada nodo y denominadas grados de libertad. El conjunto de
relaciones entre el valor de una determinada variable entre los nodos se puede escribir en
forma de sistema de ecuaciones lineales. A la matriz de este sistema de ecuaciones se le llama
matriz de rigidez del sistema. El número de ecuaciones de este sistema es proporcional al
número de nodos.

74 4.-Software de simulación.
Figura 4.1: Ejemplo de mallado de un SRM.
4.2. CEDRAT FLUX.
El programa Cedrat Flux es un programa de elementos finitos, el cual está distribuido en 3
partes.
Figura 4.2: Logo software Cedrat Flux.
La primera parte es el “Pre-Flux”. En esta apartado se debe de realizar la geometría del motor,
ya sea importada o dibujada mediante coordenadas, se asignan los materiales a todas las
regiones del motor, y se dibuja el circuito eléctrico perteneciente a nuestro motor.
La segunda parte es la del cálculo, en esta parte se solucionara el problema generado en la
parte anterior.
La última parte es la responsable de obtener los resultados llamada “Post-processing”. En este
apartado se obtendrán los resultados gráficos del cálculo realizado anteriormente.
Todos estos pasos están descritos detalladamente, en el anexo A de este proyecto.

4.-Software de simulación 75
4.1.1. Análisis estático.
Con el análisis estático del FLUX en el apartado de “Post-processing” podremos obtener las
gráficas características, como el par según la corriente y el flujo respecto a la corriente.
Figura 4.3: Graficas de flujo concatenado y par.
Para el análisis estático de nuestra maquina primeramente se realizan una serie de pasos
recogidos en el anexo A de este proyecto. Una vez realizados los pasos se procede a extraer los
resultados de par y flujo concatenado de la máquina. Para ello se excita una fase y se le dice al
programa que analice alimentando a varias corrientes y a diferentes posiciones. Estas
posiciones por ejemplo en un SRM con configuración polar 8/6 serán 30⁰, puede ser de
posición alineada a posición desalineada, y los pasos de análisis serán los que el usuario defina.
Una vez realizado el análisis, se extraerán los datos del programa en forma de una tabla de
Excel. Con estos datos en Excel podremos graficar las curvas de par y de flujo concatenado y
tendremos el análisis estático de la máquina.
4.1.2. Análisis dinámico (Coupling).
Para la realización directa de este tipo de análisis en Flux se seguirá el tutorial del anexo A para
definir la geometría del mismo y conformar todos los materiales de los cuales está construido.
Una vez configurado el motor, nos deberemos de dirigir al esquema creado en Simulink el cual
funcionara como controlador y convertidor de nuestro motor. En Simulink se introducirá un
bloque específico de Flux y Simulink llamado Coupling. Este bloque hace que nuestro motor
diseñado en Flux esté conectado al control realizado en Simulink, de esta manera se puede
realizar una simulación totalmente interactiva, variando la tensión de entrada del motor,
ampliando los grados de conducción, etc.
76 4.-Software de simulación.
4.2. FEMM.
FEMM (Finite Element Method Magnetics) software es un software de distribución gratuita. La
utilización del mismo es bastante compleja y menos intuitiva que la realización de lo mismo a
través de Flux.
Figura 4.4: Ventana del software FEMM.
La comparación del modo de funcionamiento a través de FEMM únicamente la haremos con
el análisis estático, esto no significa que solamente pueda ser este el método de análisis,
también existe un método de funcionamiento en dinámico que se realiza a través de Matlab.
Para la realización del análisis estático, es necesario realizar un archivo con unos comandos
tales como la intensidad final de la fase a excitar, los grados a girar y los pasos tanto de la
corriente como de los cambios de posición. Este archivo será introducido, después de
configurar todo lo referente a la geometría y materiales del motor, en una consola llamada Lua
en Femm y se realizara el proceso de cálculo. Al finalizar tendremos las medidas, que
queríamos y hemos escrito en el archivo de Lua, en bloc de notas. Estos bloc de notas los
escribiremos en hojas de Excel. Con estos datos extraídos ya en una hoja de Excel podremos
tener la curva de par según su posición y según su corriente. También podremos obtener lo
mismo con el flujo concatenado.

4.-Software de simulación 77
4.3. Realización del análisis dinámico a través de los resultados en estático.
Con los datos del análisis estático recogido en la hoja de Excel ya sean a través de FEMM o
FLUX nos dirigiremos a Matlab/Simulink. En Simulink tendremos que tener un sistema
montado que nos realice la función de controlador, convertidor y motor. Para la construcción
del motor en Simulink se realizará según el modelado matemático. Aquí es donde se deben de
utilizar las los datos extraídos del análisis estático. Estas tablas serán introducidas para que se
realice el cálculo. Este método se denomina “Look up tables”
4.4. Comparación de los diferentes métodos.
4.4.1. Comparación entre “look up tables” y Coupling to Simulink.
Para realizar la comparación se realizarán ensayos con los diferentes métodos de simulación y
obtención de datos.
En primer lugar vamos a comprobar los resultados obtenidos mediante la obtención de las
curvas estáticas del motor. En nuestro caso, estas han sido obtenidas mediante el programa
FLUX. Con el objetivo de validar los resultados extraídos por otro proyectista, con el programa
de elementos finitos FEMM.
Las características principales del motor con el que se ha realizado la comparación son:
Parámetros Valor Unidad
Características nominales del motor
Potencia nominal (Pu) 475 W
Velocidad nominal 1800 rpm
Tensión de alimentación 42 V
Rendimiento en condiciones nominales 0,80 -
Geometría del motor
Nº de polos en el estator 8 -
Nº de polos en el rotor 6 -
Nº de fases 4 -
Diámetro exterior del rotor (Dee) 104 mm
Longitud del paquete de chapas (L) 80 mm

78 4.-Software de simulación.
Seguidamente podemos observar la curva de par estático, obtenida en FLUX:
Figura 4.5: Gráfica par-posición obtenida de Flux.
A continuación observaremos la curva de par estático, dibujada con los datos que se extraen
de FEMM.
Figura 4.6: Gráfica par-posición obtenida FEMM.
Como se puede observar, para realizar la comparación se ha analizado a una determinada
posición (12ᵒ) y para una misma corriente (30A) el valor del par obtenido mediante los dos
programas. El resultado obtenido de este análisis es similar con ambos métodos de simulación,
por lo tanto se puede afirmar que ambos sistemas de simulación son muy parecidos. La
pequeña variación en los resultados que podemos apreciar, se debe al método de cálculo
utilizado en cada uno de los programas.
A continuación se realizarán ensayos dinámicos de este mismo motor a una velocidad de
1800rpm, los métodos de simulación serán, la aplicación de Coupling to Simulink de FLUX y el
denominado “Look up tables”.
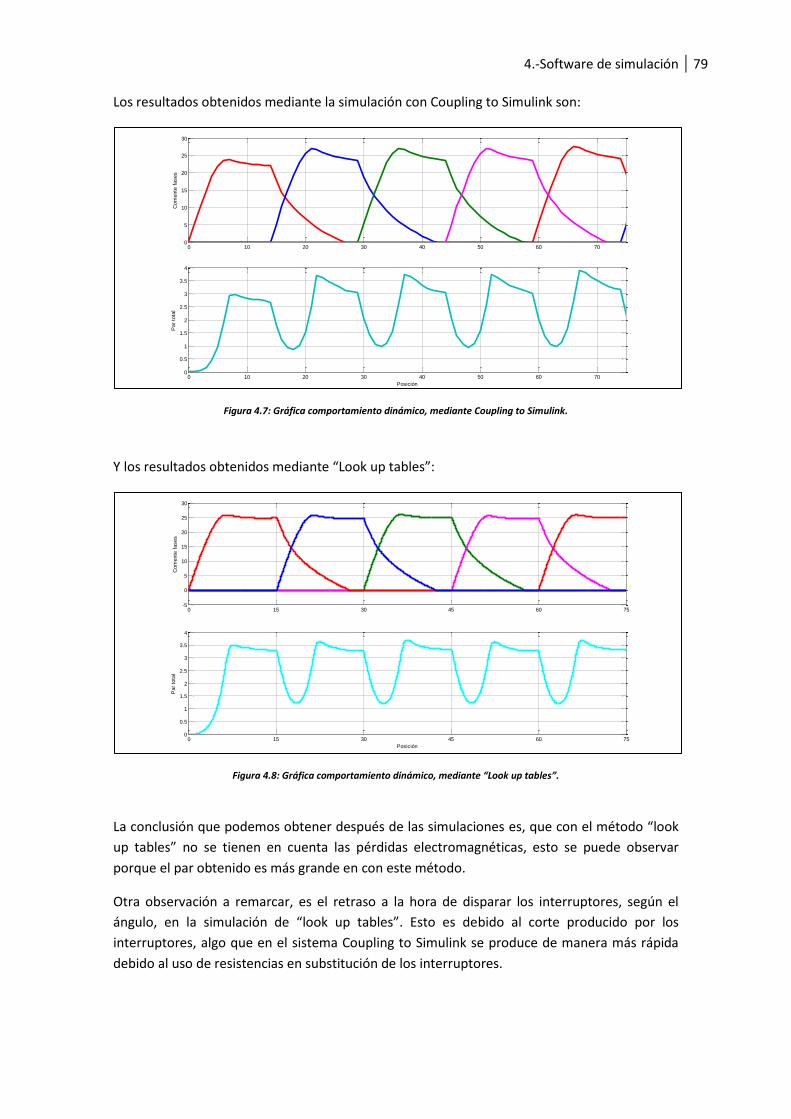
4.-Software de simulación 79
Los resultados obtenidos mediante la simulación con Coupling to Simulink son:
Figura 4.7: Gráfica comportamiento dinámico, mediante Coupling to Simulink.
Y los resultados obtenidos mediante “Look up tables”:
Figura 4.8: Gráfica comportamiento dinámico, mediante “Look up tables”.
La conclusión que podemos obtener después de las simulaciones es, que con el método “look
up tables” no se tienen en cuenta las pérdidas electromagnéticas, esto se puede observar
porque el par obtenido es más grande en con este método.
Otra observación a remarcar, es el retraso a la hora de disparar los interruptores, según el
ángulo, en la simulación de “look up tables”. Esto es debido al corte producido por los
interruptores, algo que en el sistema Coupling to Simulink se produce de manera más rápida
debido al uso de resistencias en substitución de los interruptores.
0 10 20 30 40 50 60 700
5
10
15
20
25
30
Corr
iente
fases
0 10 20 30 40 50 60 700
0.5
1
1.5
2
2.5
3
3.5
4
Posición
Par
tota
l
0 15 30 45 60 75-5
0
5
10
15
20
25
30
Corr
iente
fases
0 15 30 45 60 750
0.5
1
1.5
2
2.5
3
3.5
4
Posición
Par
tota
l

80 4.-Software de simulación.
Podemos concluir diciendo, que ambos métodos son válidos a la hora de realizar la simulación,
pero en este caso nos decantaríamos por el sistema Coupling to Simulink por el hecho de tener
en cuenta las pérdidas electromagnéticas.
4.4.2.- Estudio de la solapación de dos fases.
Con el objetivo de comprobar la saturación del flujo y la utilidad del "Coupling to Simulink" de
Flux se emula un comportamiento como el que se podrá observar en la siguiente figura dónde
dos fases están excitadas a la vez. Esto es tratado mediante el sistema "Look at tables" como
una superposición de flujo en las fases, lo cual no es cierto tal y como se va a demostrar.
Después de realizar el estudio dinámico del motor imponiendo unos ángulos de conducción (a
ON = 0) y (a OFF = 20) mediante la aplicación "Coupling to Simulink", las gráficas obtenidas en
este caso son las que aparecen en siguiente figura.
Figura 4.10: Estudio comportamiento dinámico cuando coinciden dos fases del motor.
Como se puede observar en las gráficas las dos fases se cruzan a 20.4º donde tenemos una
corriente de 21.88A y un par de 3.47Nm aproximadamente. Estos resultados se compararán
con los obtenidos mediante el programa FEMM en estas mismas condiciones.

4.-Software de simulación 81
Figura 4.11: Par obtenido en las mismas condiciones que en la figura anterior pero con el programa FEMM.
En esta figura podemos observar como el par obtenido con el programa FEMM es bastante
similar al obtenido anteriormente con el "Coupling to Simulink" la pequeña diferencia
apreciable se debe a la forma de operar las ecuaciones de los diferentes programas. En las
figuras siguientes aparece el flujo concatenado obtenido en las dos fases activas en estas
condiciones, mediante este mismo programa.
Figura 4.12: Flujo concatenado obtenido en las dos fases activas mediante el programa FEMM
Este flujo obtenido en FEMM lo compararemos con el flujo obtenido mediante la simulación
estática del motor con el programa Flux en esas mismas condiciones. Para ello deberemos
sumar estos dos valores de flujo para posteriormente comparar el valor total de este con el
que obtendremos en Flux. En este caso el valor total del flujo es 0.0883932 Webbers. En la
siguiente figura veremos los resultados obtenidos en Flux.

82 4.-Software de simulación.
Figura 4.13: Flujo concatenado total obtenido mediante el programa Flux
Como podemos ver el valor obtenido en este caso es 0.0895073 Webbers, el cual también es
bastante similar al resultante del programa FEMM. Por último comprobaremos que el par
obtenido en ese mismo punto mediante el programa Flux coincide con los valores de par
mencionados anteriormente.
Figura 4.14: Par obtenido mediante el programa Flux
Como se puede observar el valor del par en este caso es ligeramente superior a los anteriores,
esta pequeña variación también es debida a la forma de operar de los diferentes programas.
Una vez realizadas todas las comparaciones, podemos concluir diciendo que cualquiera de los
métodos utilizados en este apartado resulta óptimo para el estudio en cuestión, en cambio con
el método de las "look at tables" los resultados obtenidos no serían adecuados para realizar
este estudio.
4.4.3. Estudio de la solapación de tres fases
En este caso se realiza el mismo estudio que en el apartado anterior pero en un ángulo donde
coincidan tres fases dando corriente. Para ello realizaremos el estudio dinámico del motor
mediante la aplicación "Coupling to Simulink" imponiendo unos ángulos de conducción (a ON =
0) y (a OFF = 22). Los resultados gráficos obtenidos se pueden observar en la siguiente figura.

4.-Software de simulación 83
Figura 4.15: Estudio comportamiento dinámico cuando coinciden tres fases del motor
Como podemos observar en las gráficas a los 35.7º hay tres fases conduciendo donde tenemos
una corriente de 24'5A en las fases B y C, y de 7.23A en la fase A. El par total resultante en este
punto es de 3.688Nm. Estos resultados los compararemos con los obtenidos mediante el
programa FEMM en estas mismas condiciones.
Figura 4.16: Par obtenido en las mismas condiciones que en la figura anterior pero con el programa FEMM.
Se puede observar que el par obtenido con el programa FEMM es bastante similar al obtenido
anteriormente con el "Coupling to Simulink" la pequeña diferencia apreciable se debe otra vez
más a la forma de operar las ecuaciones de los diferentes programas.

84 4.-Software de simulación.
En este caso no podemos realizar la comparación con el análisis estático de Flux, ya que el
programa no nos deja analizar fases dando diferentes corrientes en un mismo instante. Por
tanto concluiremos diciendo que el estudio de la solapación de tres fases en un mismo
instante dando diferentes corrientes se puede analizar dinámicamente con la aplicación
"Coupling to Simulink" del programa Flux y estáticamente mediante el programa de FEMM.
4.4.4. Estudio del flujo en la corona del estator cuando hay dos fases conduciendo.
En esta apartado realizaremos el estudio del flujo en la corona del estator en el momento en
que dos fases están conduciendo a la vez, este estudio lo realizaremos solamente con el
programa FEMM ya que el Flux sólo da la opción de obtener el flujo en las bobinas.
Para ello observaremos el valor del flujo en las dos zonas que aparecen remarcadas en la
siguiente figura. Los valores de corriente y posición en este caso son los mismos que los
utilizados en el apartado 4.4.2 de este mismo capítulo.
Figura: 4.17: Zonas en donde se realiza el estudio del flujo en la corona del estator con el programa FEMM
Los resultados obtenidos en estos puntos son los que aparecen a continuación.

4.-Software de simulación 85
Figura 4.18: Resultados obtenidos del estudio del flujo en la corona del estator con el programa FEMM.
Como se puede observar el valor absoluto del flujo en la zona número dos es más grande que
en la zona número uno. Esto es debido a que en el segundo punto influyen las líneas de flujo
que provienen de los polos de las fases A y B. En cambio en el primer punto solo aparecen
líneas de flujo que provienen del polo de la fase A.
Podemos concluir diciendo que aunque muchos modelos de simulación consideren que el flujo
que pasa cuando hay más de una fase excitada sigue el mismo comportamiento pueden
superponerse los resultados de una sola fase. Por lo tanto cuando la máquina trabaja en
condiciones iguales a las de la fig 4.10, el flujo que se produce es el mostrado en las fig.4.17, y
puede verse que no se reparte de forma simétrica, de esta forma sería necesario calcular todas
las variables que dependen del flujo de forma conjunta y nunca por separado. Esto es posible
realizarlo con la herramienta "Coupling to Simulink", quedando demostrada su utilidad.

86 4.-Software de simulación.
4.4.5 Comparación Coupling y motor real
A continuación se realizará la comparación de los datos extraídos en un ensayo del motor real
y los datos obtenidos mediante el programa de simulación Coupling to Simulink ambas
ensayos están ejecutados a 1800 rpm y con ángulos de dispara de 0 a 15 grados.
El objetivo de este estudio es validar los resultados obtenidos mediante las simulaciones
dinámicas del motor diseñado, el diseño del cual se ha realizado usando la metodología de
diseño propuesta en este proyecto, por tanto también estaremos validando dicha
metodología.
Figura 4.19: Gráfica de corrientes de fase y par del motor real.
Figura 4.20: Gráfica de corrientes de fase y par extraídas mediante Coupling to Simulink.
Como podemos apreciar en los diferentes resultados expuestos en las figuras anteriores, la
diferencia más notoria entre estos 2 ensayos es la disminución de par total en el ensayo del
motor real. Esta diferencia es debida a que el programa de simulación mediante "Coupling to
0 15 30 45 60 750
5
10
15
20
25
Corr
iente
de f
ases (
A)
15 30 45 60 750.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Posición (deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 750
5
10
15
20
25
30
Corr
iente
de f
ases (
A)
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75-0.5
0
0.5
1
1.5
2
2.5
3
3.5
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D

4.-Software de simulación 87
Simulink" no tiene en cuenta algunas de las variables que influyen directamente sobre el
motor real. Algunas de ellas son; las pérdidas mecánicas producidas por rozamientos, el
coeficiente de inercia del motor, pérdidas eléctricas provocadas por el efecto Joule entre otras.


5.-Caso de estudio 89
5.-Caso de estudio.
5.1.- Proceso de diseño.
Para la comprobación del funcionamiento de todas las herramientas creadas para la
realización del diseño del SRM, se ha decidido realizar el diseño con los requerimientos del
accionamiento SRM, existente del departamento GAECE.
Los requerimientos del motor son los siguientes:
Parámetros Valor Unidad
Características nominales del motor
Potencia nominal (Pu) 475 W
Velocidad nominal 1800 rpm
Tensión de alimentación 42 V
Rendimiento en condiciones nominales 0,80 -
Geometría del motor
Nº de polos en el estator 8 -
Nº de polos en el rotor 6 -
Nº de fases 4 -
Diámetro exterior del rotor (Dee) 104 mm
Longitud del paquete de chapas (L) 80 mm
Tabla 5.1: Requerimientos para el diseño del motor.
Después de introducir estos requerimientos, se siguen las instrucciones del capítulo 2, para
seguir introduciendo los demás valores.
Una vez finalizada la hoja de cálculo, observamos los valores del dimensionamiento del motor.
Parámetro Valor Unidad
POLOS DEL ESTATOR 8 -
POLOS DEL ROTOR 6 -
DIAMETRO EXTERIOR ESTATOR (DEE) 104,00 mm
DIAMETRO ENTREHIERRO ESTATOR (DENTE) 55,92 mm
DIAMETRO INTERIOR ESTATOR (DIE) 97,89 mm
DIAMETRO ENTREHIERRO ROTOR (DENTR) 55,12 mm
DIAMETRO INTERIOR ROTOR (DIR) 36,99 mm
ARCO POLAR ESTATORICO 21,00 °
ARCO POLAR ROTORICO 23,00 °
AMPLITUD POLAR ESTATOR (AMPE) 10,19 mm
AMPLITUD POLAR ROTOR (AMPR) 10,99 mm
LONGITUD POLO ESTATORICO (LPE) 17,93 mm
LONGITUD POLO ROTORICO (LPR) 9,07 mm
DIAMETRO EJE (DME) 21,60 mm
LONGITUD DEL PAQUETE DE CHAPAS (L) 80,00 mm

90 5.-Caso de estudio.
Bobinado Valor Unidad
AP 4,02 mm
BP 8,04 mm
NUMERO DE ESPIRAS 42 -
RESISTENCIA 0,06 Ω
Tabla 5.2: Medidas del motor según la hoja de cálculo.
Una vez obtenidas estas medidas observamos los valores del motor real, y podemos observar
que son ligeramente diferentes.
Tabla 5.3: Medidas del motor real.
Parámetro Valor
Diámetro exterior estator 104 mm
Longitud del paquete de chapas 80 mm
Diámetro interior estator 88 mm
Diámetro entrehierro estator 56.7 mm
Diámetro entrehierro rotor 56 mm
Entrehierro 0.35 mm
Arco polar estatórico 22.37ᵒ
Arco polar rotórico 24.12ᵒ
Ancho polo estatórico 11 mm
Ancho polar rotórico 11.7 mm
Yugo estator 8 mm
Yugo rotor 8.5 mm
Longitud polo estator 15.65 mm
Longitud polo rotor 12 mm
Diámetro eje 15 mm
Número de espiras por fase 56
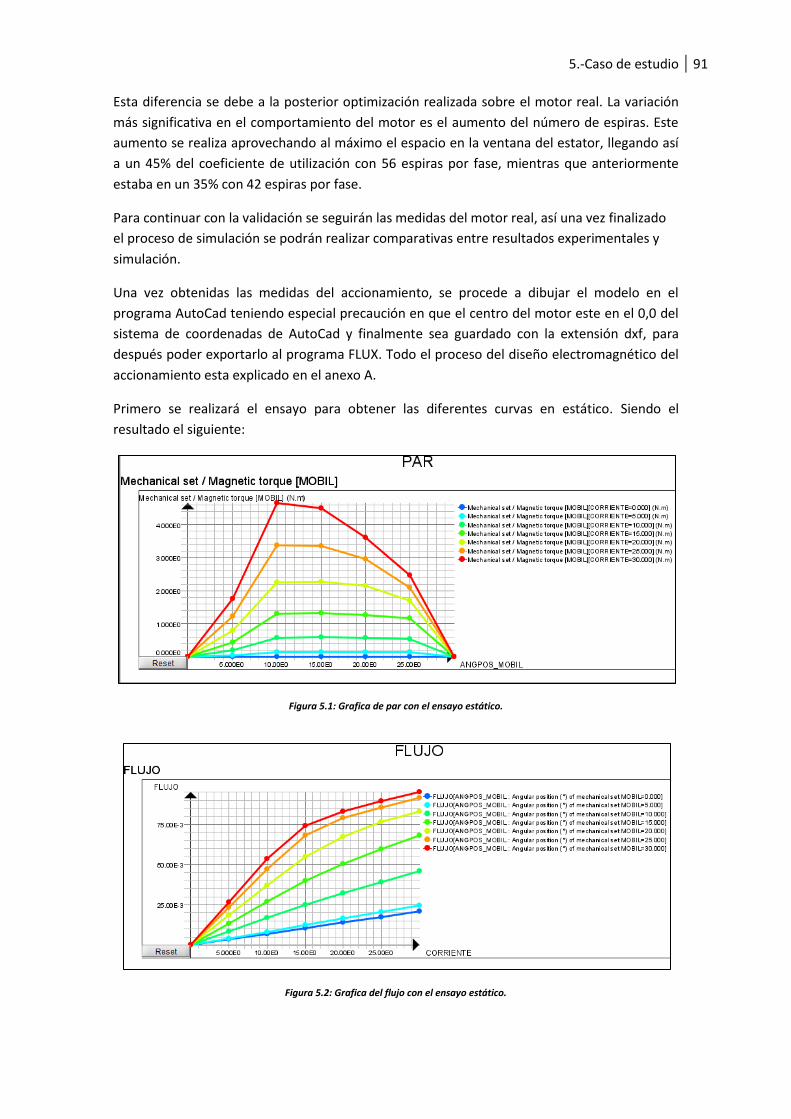
5.-Caso de estudio 91
Esta diferencia se debe a la posterior optimización realizada sobre el motor real. La variación
más significativa en el comportamiento del motor es el aumento del número de espiras. Este
aumento se realiza aprovechando al máximo el espacio en la ventana del estator, llegando así
a un 45% del coeficiente de utilización con 56 espiras por fase, mientras que anteriormente
estaba en un 35% con 42 espiras por fase.
Para continuar con la validación se seguirán las medidas del motor real, así una vez finalizado
el proceso de simulación se podrán realizar comparativas entre resultados experimentales y
simulación.
Una vez obtenidas las medidas del accionamiento, se procede a dibujar el modelo en el
programa AutoCad teniendo especial precaución en que el centro del motor este en el 0,0 del
sistema de coordenadas de AutoCad y finalmente sea guardado con la extensión dxf, para
después poder exportarlo al programa FLUX. Todo el proceso del diseño electromagnético del
accionamiento esta explicado en el anexo A.
Primero se realizará el ensayo para obtener las diferentes curvas en estático. Siendo el
resultado el siguiente:
Figura 5.1: Grafica de par con el ensayo estático.
Figura 5.2: Grafica del flujo con el ensayo estático.

92 5.-Caso de estudio.
Con estas gráficas podemos ver el alcance de nuestro motor, las posiciones en las que el par es
máximo y los valores de corriente y posición de trabajo óptimo.
Seguidamente se realiza la el cambio de aplicación, en el programa de FLUX, de aplicación
estática a dinámica, también explicada en el anexo A. Una vez realizados los cambios
pertinentes tales como la creación del circuito eléctrico y la definición de los elementos del
mismo, trasladamos el modelo creado en FLUX al programa Simulink, y mediante el bloque de
Coupling to Simulink juntamos el modelo con el control.
Figura 5.3: Modelo en Flux (A la izquierda el accionamiento, a la derecha el circuito eléctrico).
Figura 5.4: Esquema de control en Simulink con bloque Coupling to Simulink.

5.-Caso de estudio 93
5.2.- Ensayos en zona motora.
Los ensayos se realizarán para el modo de funcionamiento motor, al accionamiento, mediante
el programa de FLUX desde donde se le indicará que funcione a una velocidad constante de
1800rpm y una tensión constante de 42V, todo sin aplicarle ninguna carga a mover. Se buscará
buscar los ángulos de disparo óptimos para el motor
Primero analizaremos el motor con los ángulos de disparo de 0ᵒ a 15ᵒ tal y como se demuestra
en la teoría que serían los ángulos idóneos, para la estructura 8/6.
Figura 5.8: Gráfica de corrientes de fases y par para ángulos de disparo de 0ᵒ a 15ᵒ en Coupling to Simulink.
Para observar el par obtenido por fase, se tiene que recurrir a la simulación por “Look up
tables”. En ellas podremos ver realmente cuando la fase esta únicamente trabajando en modo
motor.
Figura 5.9: Gráfica de corrientes de fases y par para ángulos de disparo de 0ᵒ a 15ᵒ con “Look up tables”.
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 750
10
20
30
Posición (Deg)
Corr
iente
de f
ases (
A)
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75-1
0
1
2
3
4
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D
0.5 0.501 0.502 0.503 0.504 0.505 0.5060
5
10
15
20
25
30
Corr
iente
por
fases (
A)
0.5 0.501 0.502 0.503 0.504 0.505 0.506
0
1
2
3
tiempo
Par
por
fases (
Nm
)
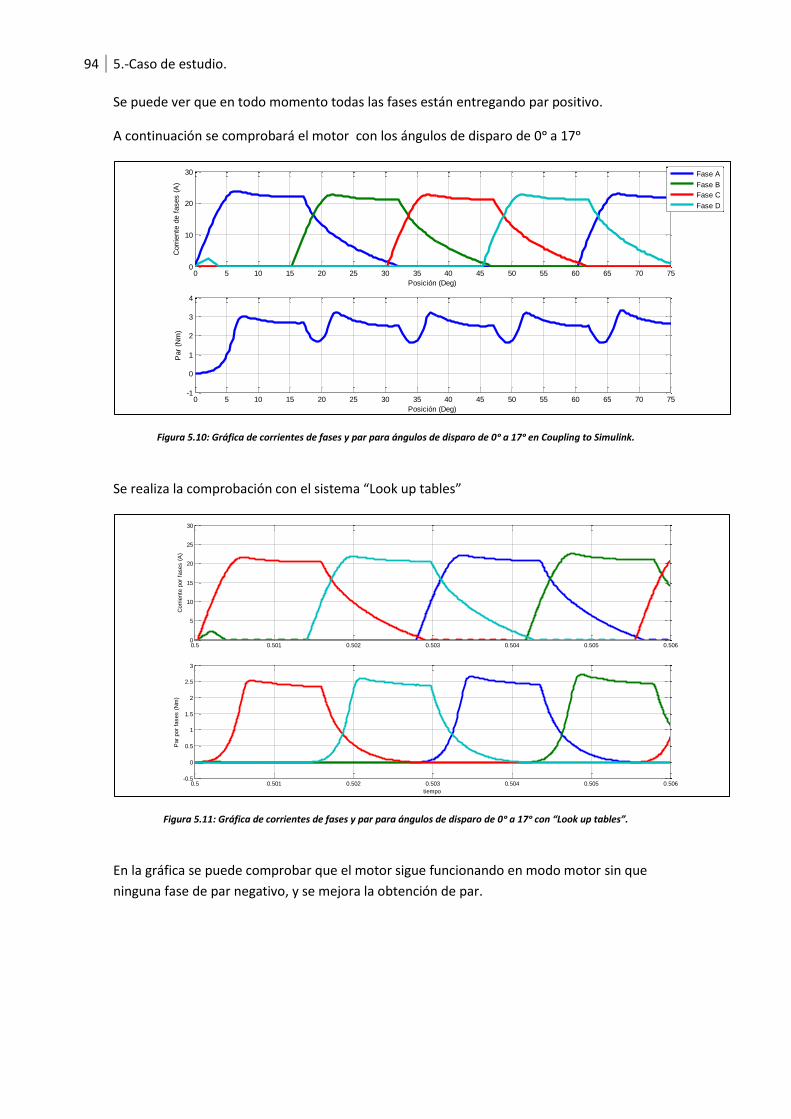
94 5.-Caso de estudio.
Se puede ver que en todo momento todas las fases están entregando par positivo.
A continuación se comprobará el motor con los ángulos de disparo de 0ᵒ a 17ᵒ
Figura 5.10: Gráfica de corrientes de fases y par para ángulos de disparo de 0ᵒ a 17ᵒ en Coupling to Simulink.
Se realiza la comprobación con el sistema “Look up tables”
Figura 5.11: Gráfica de corrientes de fases y par para ángulos de disparo de 0ᵒ a 17ᵒ con “Look up tables”.
En la gráfica se puede comprobar que el motor sigue funcionando en modo motor sin que
ninguna fase de par negativo, y se mejora la obtención de par.
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 750
10
20
30
Posición (Deg)
Corr
iente
de f
ases (
A)
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75-1
0
1
2
3
4
Posición (Deg)
Par
(Nm
)Fase A
Fase B
Fase C
Fase D
0.5 0.501 0.502 0.503 0.504 0.505 0.5060
5
10
15
20
25
30
Corr
iente
por
fases (
A)
0.5 0.501 0.502 0.503 0.504 0.505 0.506-0.5
0
0.5
1
1.5
2
2.5
3
tiempo
Par
por
fases (
Nm
)

5.-Caso de estudio 95
Se volverá a realizar el ensayo con los ángulos de disparo de 0ᵒ a 20ᵒ.
Figura 5.12: Gráfica de corrientes de fases y par para ángulos de disparo de 0ᵒ a 20ᵒ en Coupling to Simulink.
Volveremos a comprobar mediante el otro sistema que todas las fases aporten par positivo.
Figura 5.13: Gráfica de corrientes de fases y par para ángulos de disparo de 0ᵒ a 20ᵒ con “Look up tables”.
En esta ocasión comprobamos que las fases empiezan a dar par negativo en la parte final, por
lo tanto no sería idóneo superar los 20º de conducción.
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 750
10
20
30
Posición (Deg)
Corr
iente
de f
ases (
A)
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75-2
0
2
4
6
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D
0.5 0.501 0.502 0.503 0.504 0.505 0.5060
5
10
15
20
25
30
Corr
iente
por
fases (
A)
0.5 0.501 0.502 0.503 0.504 0.505 0.506-0.5
0
0.5
1
1.5
2
2.5
3
tiempo
Par
por
fases (
Nm
)

96 5.-Caso de estudio.
5.3.- Ensayos en zona generadora.
Para realizar los ensayos para el funcionamiento del accionamiento de SRM en modo
generador, operaremos de la misma manera que en zona motora, pero en el esquema de
Simulink deberemos de colocar el selector en generador y colocaremos el intervalo de ángulos
tal y como se ha explicado en el capítulo 3 de este proyecto. El ensayo esta realizado también a
una velocidad de 1800rpm y a una tensión de 42V.
El primer ensayo se realizará de 15ᵒ a 30ᵒ, donde el rotor y el estator pasan de estar alineados
a desalinearse.
Figura 5.14: Gráfica de corrientes de fases y par para ángulos de disparo de 15ᵒ a 30ᵒ en Coupling to Simulink.
Como se ha hecho en el anterior ensayo comprobaremos con el método “Look up tables”.
Figura 5.15: Gráfica de corrientes de fases y par para ángulos de disparo de 15ᵒ a 30ᵒ con “Look up tables”.
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 1350
5
10
15
Posición (Deg)
Corr
iente
de f
ases (
A)
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 135-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D
0.5 0.502 0.504 0.506 0.508 0.510
5
10
15
Corr
iente
s p
or
fase (
A)
0.5 0.502 0.504 0.506 0.508 0.51-0.4
-0.2
0
0.2
0.4
Par
por
fase (
Nm
)
0.5 0.502 0.504 0.506 0.508 0.51-0.4
-0.2
0
0.2
0.4
Tiempo
Par
(Nm
)
par medio
par total
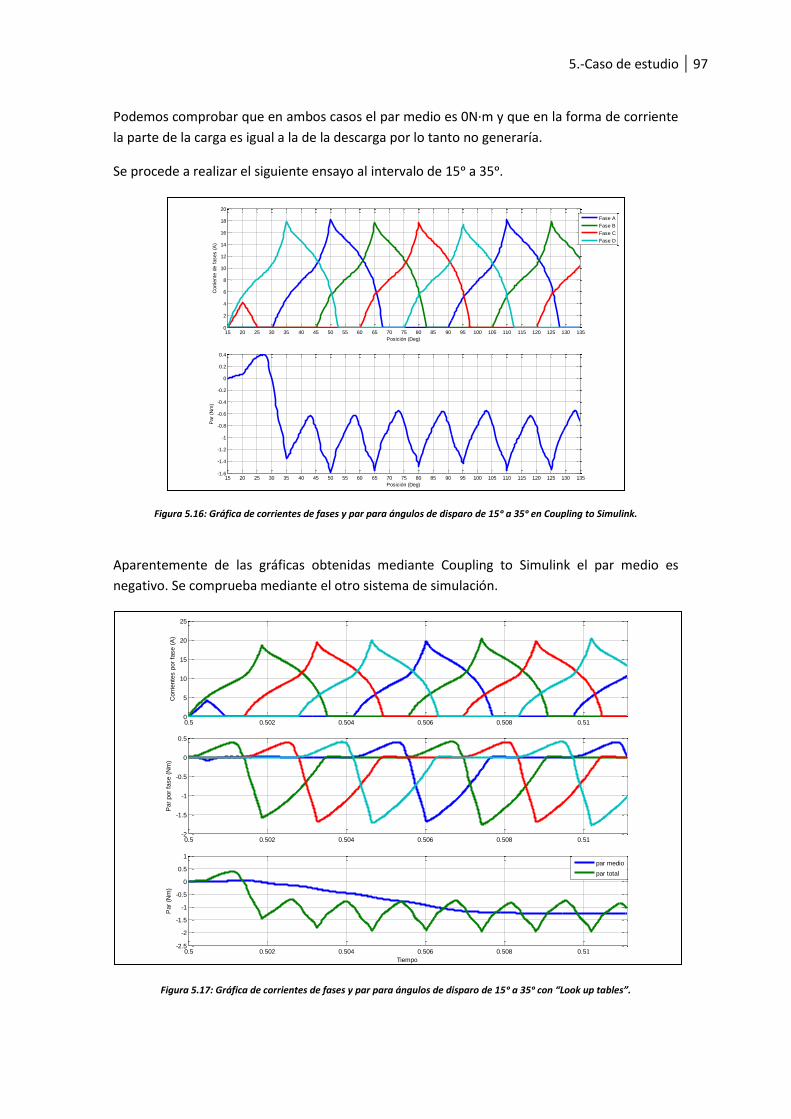
5.-Caso de estudio 97
Podemos comprobar que en ambos casos el par medio es 0N·m y que en la forma de corriente
la parte de la carga es igual a la de la descarga por lo tanto no generaría.
Se procede a realizar el siguiente ensayo al intervalo de 15ᵒ a 35ᵒ.
Figura 5.16: Gráfica de corrientes de fases y par para ángulos de disparo de 15ᵒ a 35ᵒ en Coupling to Simulink.
Aparentemente de las gráficas obtenidas mediante Coupling to Simulink el par medio es
negativo. Se comprueba mediante el otro sistema de simulación.
Figura 5.17: Gráfica de corrientes de fases y par para ángulos de disparo de 15ᵒ a 35ᵒ con “Look up tables”.
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 1350
2
4
6
8
10
12
14
16
18
20
Posición (Deg)
Corr
iente
de f
ases (
A)
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 135-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D
0.5 0.502 0.504 0.506 0.508 0.510
5
10
15
20
25
Corr
iente
s p
or
fase (
A)
0.5 0.502 0.504 0.506 0.508 0.51-2
-1.5
-1
-0.5
0
0.5
Par
por
fase (
Nm
)
0.5 0.502 0.504 0.506 0.508 0.51-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Tiempo
Par
(Nm
)
par medio
par total

98 5.-Caso de estudio.
Se puede observar que para este intervalo en el par por fase es en parte positivo.
Ampliamos los grados de conducción de 22ᵒ a 44ᵒ y procedemos a la simulación.
Figura 5.18: Gráfica de corrientes de fases y par para ángulos de disparo de 22ᵒ a 44ᵒ en Coupling to Simulink.
Comprobamos que el par por fase sea completamente negativo con el otro método de
simulación.
Figura 5.19: Gráfica de corrientes de fases y par para ángulos de disparo de 22ᵒ a 44ᵒ con “Look up tables”.
Una vez obtenido el par negativo deseado, se procede a analizar la corriente que circula por el
bus, para observar cuanta corriente es usada para realizar la excitación y cuanta corriente es
generada. Para ello se ha medido la corriente que traspasa la fuente de tensión del sistema
Coupling to Simulink.
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 1350
5
10
15
20
25
30
35
40
45
50
Posición (Deg)
Corr
iente
de f
ases (
A)
15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120 125 130 135-8
-7
-6
-5
-4
-3
-2
-1
0
Posición (Deg)
Par
(Nm
)
Fase A
Fase B
Fase C
Fase D
0.5 0.502 0.504 0.506 0.508 0.510
20
40
60
Corr
iente
s p
or
fase (
A)
0.5 0.502 0.504 0.506 0.508 0.51-8
-6
-4
-2
0
2
Par
por
fase (
Nm
)
0.5 0.502 0.504 0.506 0.508 0.51-10
-8
-6
-4
-2
0
Tiempo
Par
(Nm
)
par medio
par total

5.-Caso de estudio 99
Figura 5.20: Gráfica de corrientes de fases y corriente de bus para ángulos de disparo de 22ᵒ a 44ᵒ con Coupling to Simulink.
Podemos observar que hasta que el sistema no está en régimen permanente la excitación de
las fases (Corriente de bus mayor a 0) es más grande que la corriente generada (Corriente de
bus inferior a 0). Una vez ha llegado a régimen permanente se ve como es más la corriente
generada que la de excitación. Para poder observar mejor este efecto se ampliará la corriente
del bus en la siguiente figura.
Figura 5.21: Gráfica ampliada de corriente de bus para ángulos de disparo de 22ᵒ a 44ᵒ con Coupling to Simulink.
Para obtener la potencia generada, se ha realizado la media de corriente de bus y se ha
multiplicado por el voltaje con el que se alimenta el accionamiento, generando una media de
corriente de 13,7ª y una potencia de 575,5W. Esto se puede apreciar en la siguiente gráfica.
0 20 40 60 80 100 1200
10
20
30
40
50
Corr
iente
de f
ases (
A)
0 20 40 60 80 100 120-50
0
50
Posición (Deg)
Corr
iente
de b
us (
A)
Fase A
Fase B
Fase C
Fase D
80 85 90 95 100 105 110-50
-40
-30
-20
-10
0
10
20
30
40
Posición (Deg)
Corr
iente
de B
us (
A)

100 5.-Caso de estudio.
Figura 5.22: Gráfica de corriente de bus y potencia para ángulos de disparo de 22ᵒ a 44ᵒ con Coupling to Simulink.
Como se puede observar está entregando potencia una vez que el motor esta en régimen
permanente, antes de esto está consumiendo para excitar las fases. También se puede
observar que los picos de corriente son bastante grandes, por lo tanto a la hora de
implementar el accionamiento real es un factor a tener en cuenta para no dañar elementos.
En ambos casos tanto como para el funcionamiento motor o generador, la optimización
siguiente, si se necesitaran mejores prestaciones, se debería recurrir a rediseñar el
accionamiento.
0 20 40 60 80 100 120 140 160 180-50
0
50
X: 123.6
Y: -13.7
Corr
iente
s (
A)
0 20 40 60 80 100 120 140 160 180-600
-500
-400
-300
-200
-100
0
100
200
X: 123.6
Y: -575.5
Posición (Deg)
Pote
ncia
(W
)
Corriente media de Bus
Corriente de Bus

6.-Presupuesto 101
6. Presupuesto
En este anexo se realiza una valoración económica del proyecto realizado. Se considerará que
las diferentes tareas realizadas han sido elaboradas por un ingeniero utilizando los materiales
disponibles en el laboratorio GAECE. De esta forma, al no haber tenido que comprar ningún
elemento adicional para la elaboración del mismo, no se considerará gastos materiales. Los
costes se han dividido en función de la categoría de los trabajos elaborados.
Categoría Precio hora Trabajos de ingeniería 50€
Trabajos de secretaría 15€
Tabla 6.1- Precios por hora de cada categoría
Considerando los precios por hora de la tabla 6.1 y teniendo en cuenta que se han realizado un
total de 720 horas de trabajo, divididas en dos categorías.
- Trabajos de ingeniería: 85% del total de horas realizadas.
- Trabajos de secretaría: 15% del total de horas realizadas.
Además de aplicar un 10% de beneficios en concepto de amortización de licencias de software
utilizado y otros costes derivados, el coste total del proyecto asciende a 35.442 €.
Trabajos realizados
Precio hora Horas realizadas Coste
Trabajos de ingeniería
50€ 612 horas 30.600 €
Trabajos de secretaría
15€ 108 horas 1.620 €
Subtotal 32.220 €
Beneficio (10%) 3.222 €
TOTAL 35.442 €
Tabla 6.2- Coste total del proyecto


7.-Conclusiones 103
7.-Conclusiones.
Finalizado el trabajo, se concluye que la metodología adoptada para el diseño del
accionamiento y posterior simulación es de fácil utilización y es un método relativamente
rápido para realizar mejoras en cualquier punto del accionamiento, ya sea en el diseño del
motor, por un especialista en diseño, como en el control, por un especialista en el campo de
regulación y control. Esto es debido, a que con esta metodología de trabajo, es posible acceder
únicamente a una parte del sistema y realizar la optimización centrándose en solamente una
disciplina de la ingeniería, pero integrando en el conjunto muchas de ellas que son
transparentes para el diseñador.
Respecto a los programas vistos y utilizados, se ha podido comprobar que estos son válidos
para realizar el diseño del accionamiento SRM, con ventajas e inconvenientes entre unos y
otros. Por esto se extraen conclusiones para cada uno de ellos.
“Look up tables”
Las ventajas de este sistema son la rapidez a la hora de simular y la posibilidad de obtener el
par de cada fase de forma dinámica. Esto facilita la tarea de escoger que ángulos de disparo
son los adecuados para realizar la función de motor o generador en el accionamiento. Los
inconvenientes son; la dificultad de extraer las curvas de par y de flujo de un programa de
elementos finitos para realizar la simulación del accionamiento, y otro inconveniente es que
no se tiene en cuenta las perdidas electromagnéticas.
“Coupling to Simulink”
Este sistema viene respaldado por el programa FLUX el cual es un programa muy potente para
realizar cualquier cálculo. La mayor ventaja de este programa es la posibilidad de realizar
cambios en el diseño e inmediatamente poder simular en el entorno de Simulink. Como
inconvenientes se puede destacar poca rapidez a la hora de realizar las simulaciones debido a
que están 2 programas trabajando conjuntamente en el ordenador y otro inconveniente es
que no es muy utilizado, por lo tanto no existe mucha bibliografía y en el caso de intentar
realizar motores poco comunes (Como por ejemplo el motor de reluctancia hibrido) nos
podemos encontrar con diferentes problemas. En definitiva es un programa muy a tener en
cuenta en el futuro debido a las grandes oportunidades que brinda, porque a pesar de que en
este proyecto únicamente se han hablado de soluciones electromagnéticas, el programa
también tiene la opción de calcular parámetros térmicos y trabajar en 3D.
“Femm”
Este programa de elementos finitos es comúnmente conocido además de utilizado, debido a
que lleva una larga trayectoria en el mundo del análisis de motores y que es de libre
distribución. Como principales ventajas se tiene que para realizar análisis estáticos y de zonas
puntuales es el más rápido. Como inconvenientes, se puede destacar que para extraer los
datos para después realizar las “look up tables” utiliza la consola LUA y se debe de introducir
lenguaje de programación, y además es un método muy lento.

104 7.-Conclusiones.
Realizando los ensayos del accionamiento funcionando tanto en motor como en generador, se
ha podido comprobar que el ajuste de los ángulos de disparo es un trabajo largo y delicado,
teniendo en cuenta que estos dependerán de la carga que arrastre el accionamiento y la
velocidad del mismo. También se ha podido observar que cuando el accionamiento se
comporta como generador la corriente generada es de gran valor, cosa que podría ser un
inconveniente al realizar el circuito del convertidor real y perjudicial para la batería.

8.-Futuras líneas de trabajo 105
8.-Futuras líneas de trabajo.
Durante el desarrollo del TFG también se ha trabajado con la simulación de un accionamiento
de reluctancia hibrido (MHR) con el cual se ha realizado la simulación estática con la versión de
Flux 10.4. Pudiendo ser este un punto de inicio para nuevos trabajos en la línea de
investigación de este tipo de motores.
También se ha empezado a trabajar con la versión FLUX 11. Sería importante empezar a
trabajar con esta nueva versión debido a que incluye nuevas mejoras, tales como una paleta
de dibujo más sencilla que en versiones anteriores, y un nuevo bloque para el “Coupling to
Simulink” mucho más intuitivo.
Sería importante desarrollar y mejorar el circuito para utilizar el accionamiento como
generador SRG, para no tener problemas con los picos de corriente generada.
Otra línea de estudio sería el cálculo de las pérdidas en la corona del estator cuando varias
fases están en funcionamiento.
También sería interesante, el estudio del programa FEMM llamándolo desde el programa
Matlab/Simulink y extraer las diferencias, ventajas e inconvenientes respecto a Coupling to
Simulink. Una ventaja inmediata que puede tener FEMM es el precio, puesto que, este
programa es de libre distribución.


9.-Bibliografía 107
9.-Bibliografia.
[BLA07] Blanqué Molina, Balduí. ”Simulación interactiva de motores de reluctancia
autoconmutados”. Tesis Doctoral ‐Director: Andrada Gascón, Pere. Universidad Politécnica de
Cataluña, Departamento de Ingeniería Eléctrica, 2007.
[TOR02] Torrent Burges, Marcel. “Aportaciones al diseño y la caracterización del motor de
reluctancia autoconmutado”. Director: Andrada Gascón, Pere. Universidad Politécnica de
Cataluña, Departamento de Ingeniería Eléctrica, 2002.
[DEL12] I.Delgado. “Técnicas de control para accionamientos con SRM aplicados a tracción”. Proyecto final de carrera-Director: Blanqué Molina, Balduí. Universitat Politécnica de Cataluña, Departamento de Ingenieria Eléctrica, 2012. [AND05] P.Andrada. “Introducción al diseño de motores de reluctancia autoconmutados”.
Octubre 2005
[KRI01] R. Krishnan, “Switched Reluctance Motor Drives. Modeling, Simulation, Analysis,
Design, and Applications”. Ed, Industrial electronic series, ISBN 0-8493-0838-0. 2001
[MIL01] T. J. E. Miller, “Optimal Design of Switched Reluctance Motor”. IEEE Transaction on
industrial electronic, VOL. 49, NO. 1, FEBRUARY 2002


















