Toward Autonomous Free- Climbing Robots Tim Bretl, Jean-Claude Latombe, and Stephen Rock May 2003...
30
Toward Autonomous Toward Autonomous Free- Free- Climbing Robots Climbing Robots Tim Bretl, Jean-Claude Tim Bretl, Jean-Claude Latombe, and Stephen Rock Latombe, and Stephen Rock May 2003 May 2003 Presented by Randall Schuh Presented by Randall Schuh
-
date post
21-Dec-2015 -
Category
Documents
-
view
221 -
download
1
Transcript of Toward Autonomous Free- Climbing Robots Tim Bretl, Jean-Claude Latombe, and Stephen Rock May 2003...
Toward Autonomous Free-Toward Autonomous Free-Climbing RobotsClimbing Robots
Tim Bretl, Jean-Claude Tim Bretl, Jean-Claude Latombe, and Stephen RockLatombe, and Stephen Rock
May 2003May 2003Presented by Randall SchuhPresented by Randall Schuh

MotivationMotivation
Non-specific autonomous rock-climbing Non-specific autonomous rock-climbing robots could benefit several robots could benefit several applications:applications: Search-and-rescue Search-and-rescue
mountainous terrainmountainous terrain broken urban environmentsbroken urban environments
ExplorationExploration Sub-surface environmentsSub-surface environments Planetary, especially on MarsPlanetary, especially on Mars
New modes of motion for humanoid robotsNew modes of motion for humanoid robots

Previous WorkPrevious Work
Climbing robotsClimbing robots exploit unnatural surface properties, e.g.:exploit unnatural surface properties, e.g.:
Peg into holePeg into hole Suction pads (grass, steel surfaces)Suction pads (grass, steel surfaces)
Track and legged robotsTrack and legged robots ascend slopes up to 50 degreesascend slopes up to 50 degrees Few works consider choosing foot placementFew works consider choosing foot placement
GraspingGrasping usually emphasizes force-closureusually emphasizes force-closure

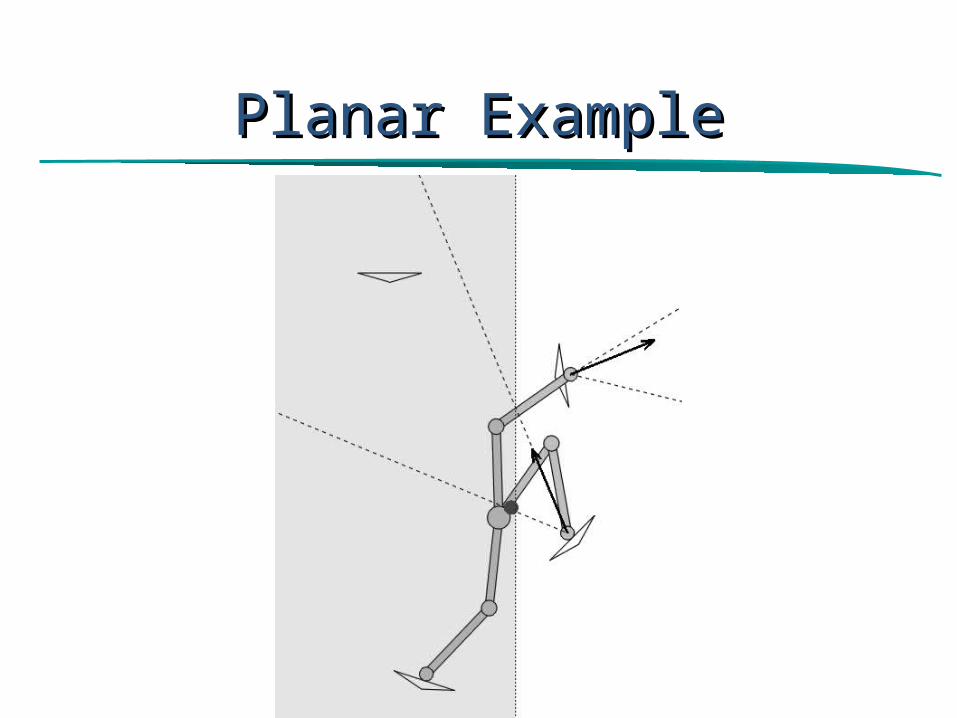
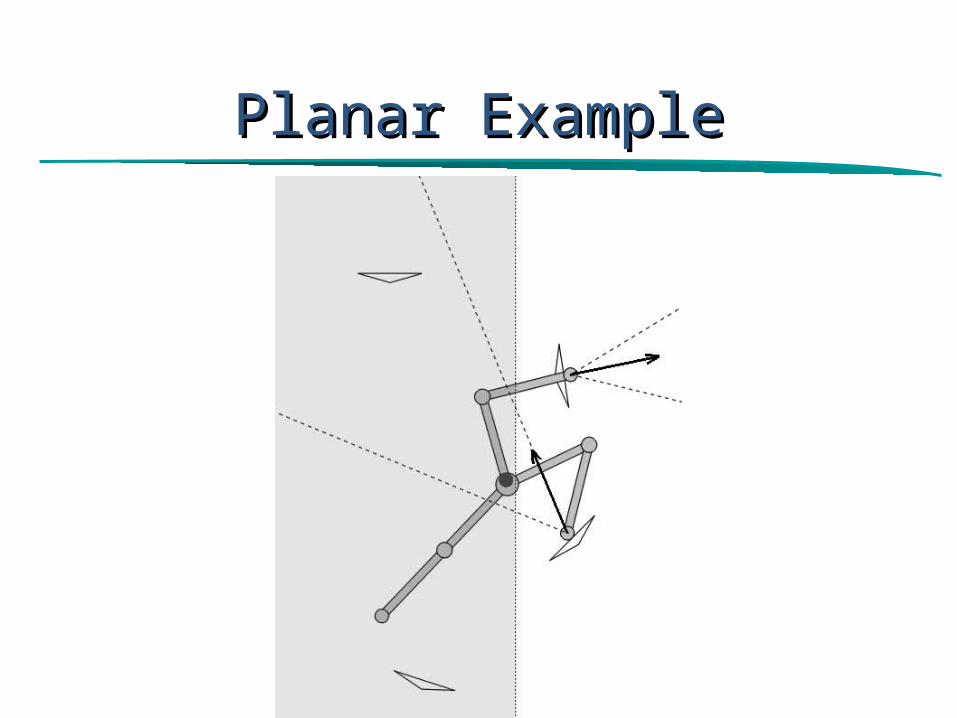
Planar ModelPlanar Model
3 identical limbs, 8 dof3 identical limbs, 8 dof Ignores self-collisionIgnores self-collision Coulomb frictionCoulomb friction Motion occurs in 4-D subspace of C-spaceMotion occurs in 4-D subspace of C-space

Planar Motion PlanningPlanar Motion Planning
One-Step-Climbing ProblemOne-Step-Climbing Problem Geometrical insight allows solution path Geometrical insight allows solution path
planning in 2 dimensions (pelvis planning in 2 dimensions (pelvis position)position)
Uses PRM techniquesUses PRM techniques Instead of collisions, the planner tests for Instead of collisions, the planner tests for
equilibriumequilibrium Uses dynamic testing algorithm (Class 3)Uses dynamic testing algorithm (Class 3) Uses a simple smoothing techniqueUses a simple smoothing technique
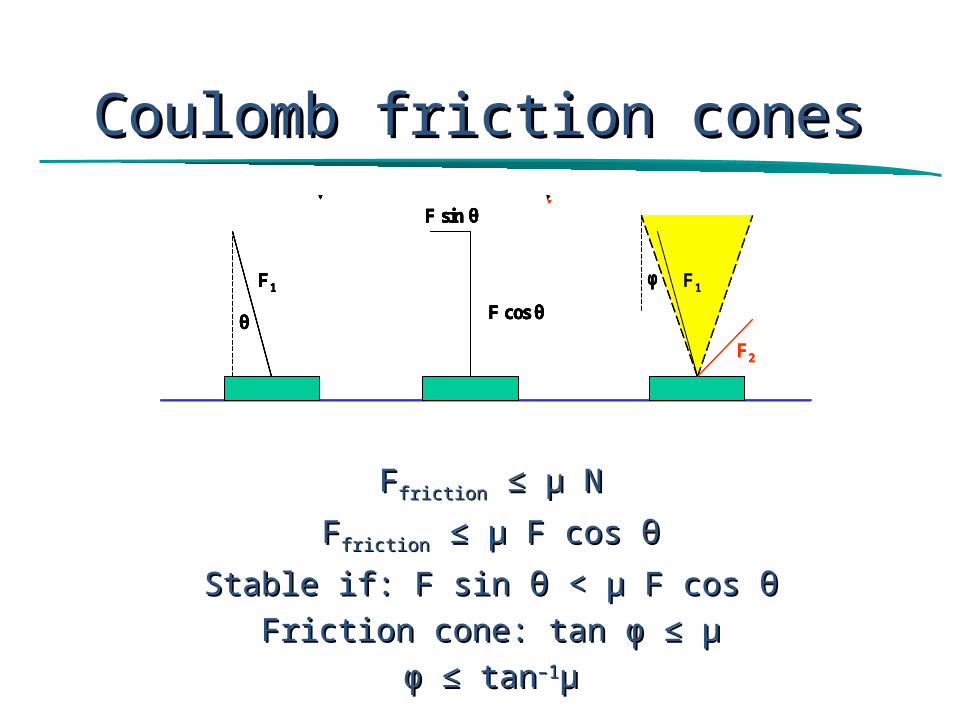
Coulomb friction conesCoulomb friction cones
FFfrictionfriction ≤ μ N ≤ μ N
FFfrictionfriction ≤ μ F cos θ ≤ μ F cos θ
Stable if: F sin θ < μ F cos θStable if: F sin θ < μ F cos θ
Friction cone: tan φ ≤ μFriction cone: tan φ ≤ μ
φ ≤ tanφ ≤ tan–1–1μμ
F cos θ
F sin θ
θ
FF1 F1
F2
φ
F cos θ
F sin θ
θ
FF1 F1
F2
φ
F cos θ
F sin θ
F cos θ
F sin θ
F cos θ
F sin θ
F cos θ
F sin θ
θ
FF1
θ
F
θ
FF1 F1
F2
φ F1
F2
φ

E
Dependent only on x
Equilibrium RegionEquilibrium Region
+ = –
+ = 0
Dependent on x

Geometrical AnalysisGeometrical Analysis
Free space of the free limb consists Free space of the free limb consists of 2 connected subsetsof 2 connected subsets

Planar ExamplePlanar Example1
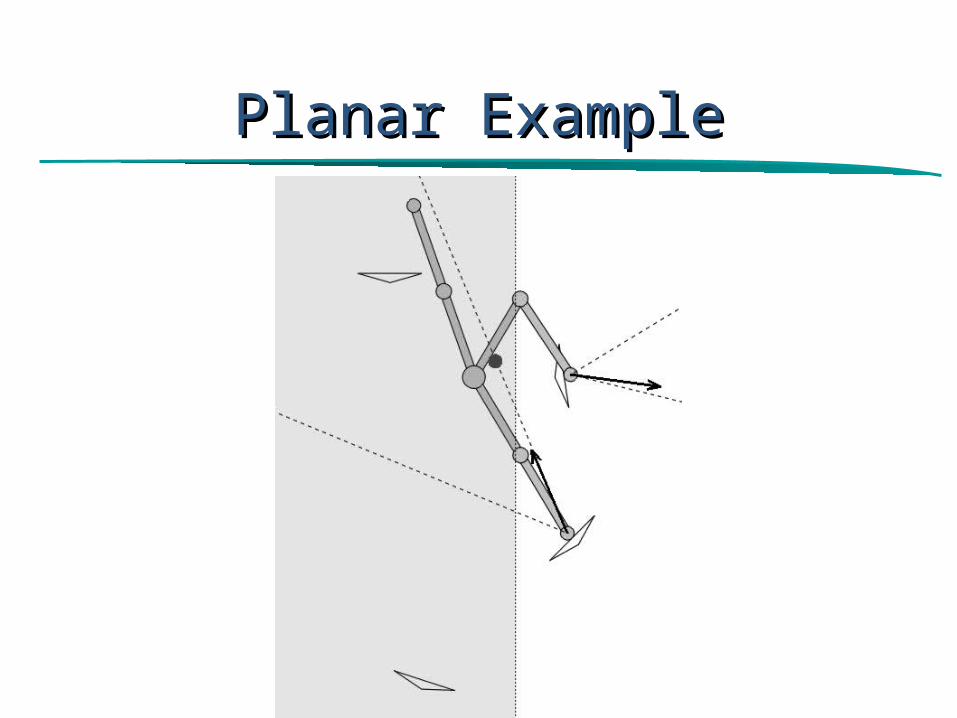
Planar ExamplePlanar Example2
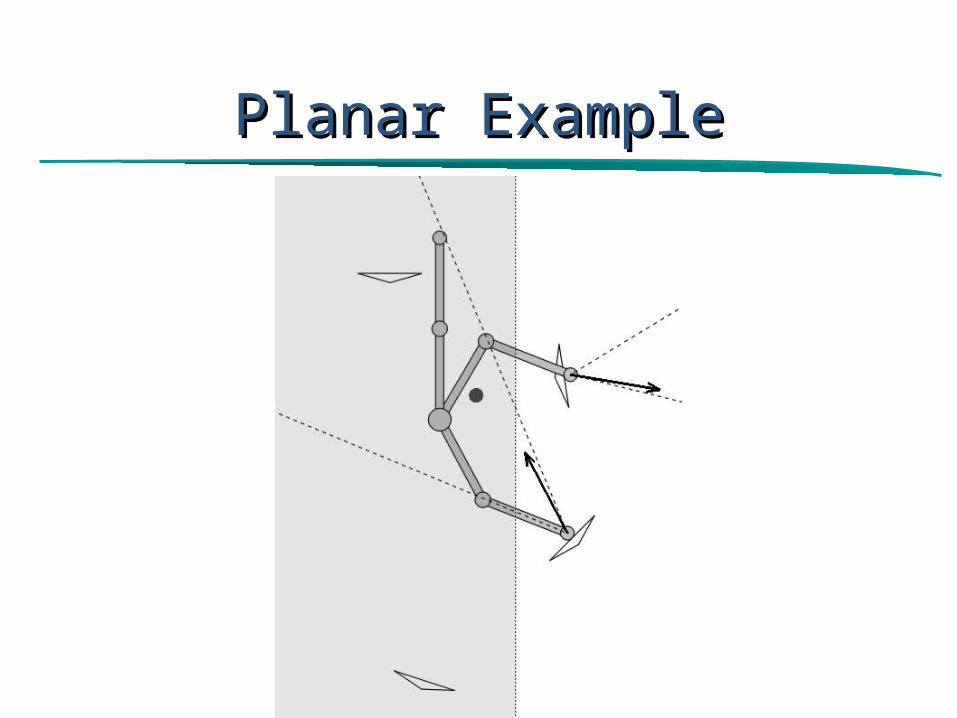
Planar ExamplePlanar Example3

Planar ExamplePlanar Example4
Planar ExamplePlanar Example5
Planar ExamplePlanar Example6

Planar ExamplePlanar Example7

Planar ExamplePlanar Example8
Climbing up mountain (first 15 sec)

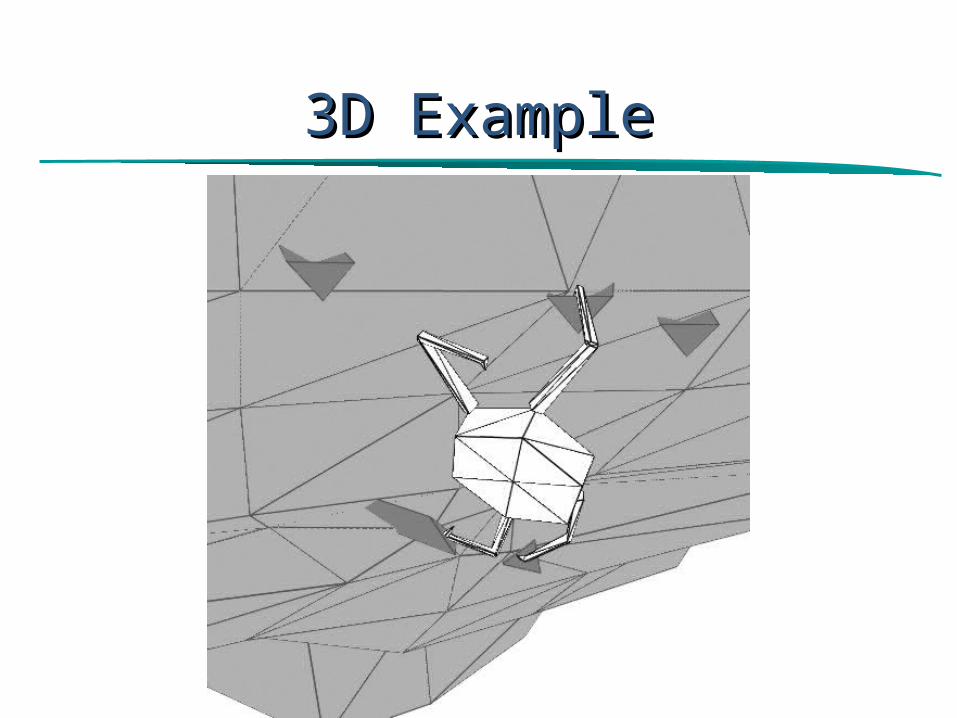
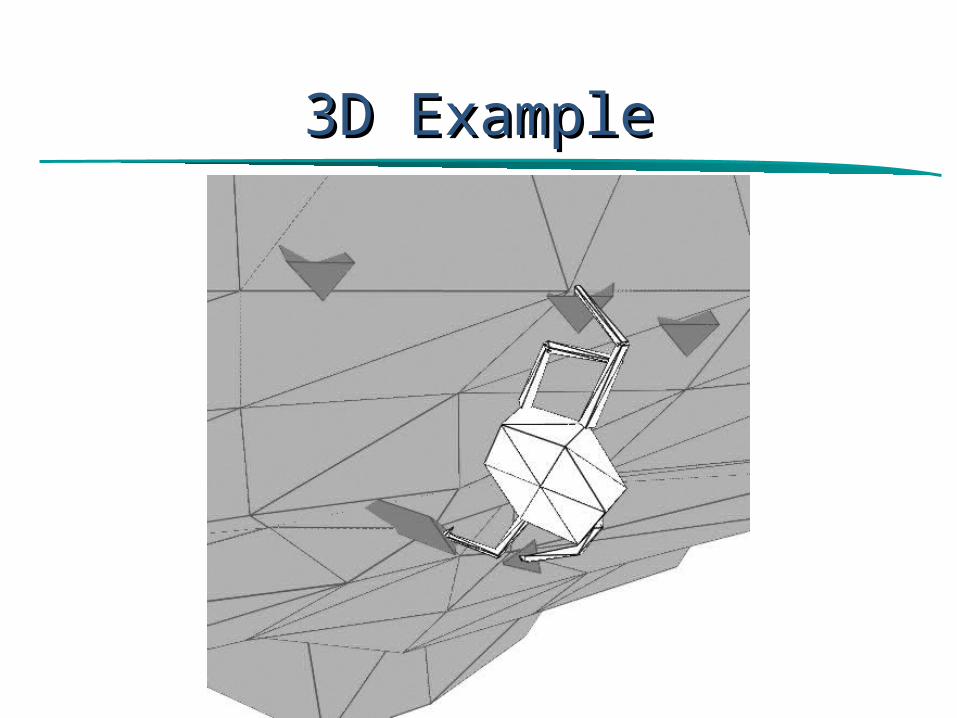
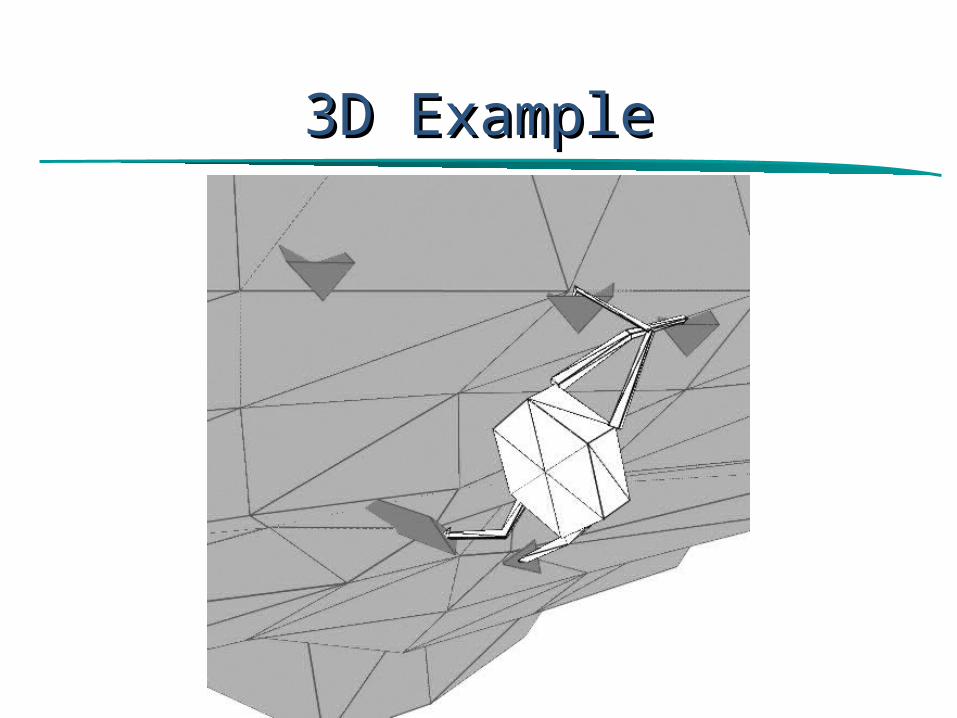
3D Model – LEMUR3D Model – LEMUR11 II II
Each limb has a spherical shoulder and a revolute Each limb has a spherical shoulder and a revolute knee (4 dof); limbs are 30 cm longknee (4 dof); limbs are 30 cm long
Joints are mechanically limitedJoints are mechanically limited Robot can push or pull from each endpointRobot can push or pull from each endpoint Motion occurs in 13-D subspace of C-spaceMotion occurs in 13-D subspace of C-space11LLimbed imbed EExcursion xcursion MMobile obile UUtility tility RRobot – developed by JPLobot – developed by JPL
3D Motion Planning3D Motion Planning
Still tests for equilibriumStill tests for equilibrium Uses PQP to test for self-collisions Uses PQP to test for self-collisions
and collisions with environmentand collisions with environment Uses a more sophisticated technique Uses a more sophisticated technique
for sampling closed kinematic chainsfor sampling closed kinematic chains Not yet reduced dimension of Not yet reduced dimension of
problem with geometrical analysis.problem with geometrical analysis.

3D Example3D Example1
3D Example3D Example2
3D Example3D Example3
3D Example3D Example4
3D Example3D Example5
3D Example3D Example6

3D Example3D Example7

3D Example3D Example8
3D Example3D Example9
Future WorkFuture Work
Apply geometric insight to be able to Apply geometric insight to be able to capture narrow passages more capture narrow passages more efficientlyefficiently
Add torque constraintsAdd torque constraints Implement the algorithm on hardware, Implement the algorithm on hardware,
which will requirewhich will require Visual and tactile sensing of graspsVisual and tactile sensing of grasps Tactile feedback (slippage detection)Tactile feedback (slippage detection) Multi-step planning based on incomplete Multi-step planning based on incomplete
informationinformation

Paper ComparisonPaper Comparison
Common Features:Common Features: Planning from a discrete series of graspsPlanning from a discrete series of grasps Applying PRM techniquesApplying PRM techniques
Differences:Differences: Application to real vs. digital environmentApplication to real vs. digital environment Kinematic & equilibrium vs. kinematic Kinematic & equilibrium vs. kinematic
constraintsconstraints