Three-dimensional interface modelling with two-dimensional ...

THREE-DIMENSIONAL PHYSICAL AND NUMERICAL MODELLING OF JACK-UP
STRUCTURES ON SAND
by
BRITTA BIENEN
Dipl.-Ing., B.Eng.
This thesis is presented for the
Degree of Doctor of Philosophy
The University of Western Australia
School of Civil and Resource Engineering
MAY 2007




i
THESIS FORMAT AND AUTHORSHIP
In accordance with the University of Western Australia’s regulations regarding
Research Higher Degrees, this thesis is presented as a series of journal papers. The
contribution of the candidate and co-author(s) for the papers comprising chapters 3, 4, 5,
6 and 7 are hereby set forth.
Paper 1
The paper presented in Chapter 3 is first-authored by the candidate and co-authored by
Dr. Byron Byrne, Professor Guy Houlsby and Professor Mark Cassidy, and is published
as
Bienen, B., Byrne, B.W., Houlsby, G.T. & Cassidy, M.J. (2006). Investigating six
degree-of-freedom loading of shallow foundations on sand. Géotechnique, Vol.
56, No. 6, pp. 367-379.
The candidate planned and carried out the experimental programme this paper is based
on under the supervision of Dr. Byron Byrne and Professor Guy Houlsby at Oxford
University. The experimental apparatus was developed by Dr. Byron Byrne and
Professor Guy Houlsby. The candidate analysed the experimental results and wrote the
paper (except the sections ‘Introduction’ and ‘Equipment’, which were written by Dr.
Byron Byrne) under the supervision of the three co-authors.

ii
Paper 2
The paper presented in Chapter 4 is first-authored by the candidate and co-authored by
Professor Mark Cassidy, and is published as
Bienen, B. & Cassidy, M.J. (2006). Advances in the three-dimensional fluid-
structure-soil interaction analysis of offshore jack-up structures. Marine
Structures, Vol. 19, No. 2-3, pp. 110-140.
The development of the numerical program introduced in this paper can be separated
into the main program, solving routines and models for the structure, the hydrodynamic
loading as well as the foundation-soil interaction with their respective interfaces with
the main program. The candidate created the main program and implemented the
solving routines and the structural model as well as the interfaces with the
hydrodynamic loading and the footing models in a FORTRAN 90 environment. The
hydrodynamic loading model had been written by Professor Mark Cassidy and the
footing model had been coded previously as a collaboration between Professor Mark
Cassidy and Professor Guy Houlsby (University of Oxford). The candidate further
checked the program against test problems obtained from literature before carrying out
and analysing the example jack-up simulations discussed in this paper. The paper was
written by the candidate under the supervision of Professor Mark Cassidy.
Paper 3
The paper presented in Chapter 5 is first-authored by the candidate and co-authored by
Dr. Christophe Gaudin and Professor Mark Cassidy, and has been accepted for
publication as

iii
Bienen, B., Gaudin, C. & Cassidy, M.J. (2007). Centrifuge tests of shallow
footing behaviour on sand under combined vertical-torsional loading.
International Journal of Physical Modelling in Geotechnics, Vol. 7, No. 2, pp. 1-
21.
The candidate planned and carried out the experimental programme this paper is based
on. The experiments were performed with an existing experimental apparatus. The
candidate analysed the experimental results and wrote the paper under the supervision
of Dr. Christophe Gaudin and Professor Mark Cassidy.
Paper 4
The paper presented in Chapter 6 is first-authored by the candidate and co-authored by
Professor Mark Cassidy and Dr. Christophe Gaudin, and has been submitted for
publication as
Bienen, B., Cassidy, M.J. & Gaudin, C. (2007). Physical modelling of a jack-up
structure on sand in the geotechnical centrifuge. Canadian Geotechnical Journal,
submitted May 2007.
The candidate designed the model jack-up and loading apparatus. Under the supervision
of the candidate and Professor Mark Cassidy, honours student Julian Byron-Brown
contributed to the selection of the cross-section used for the model jack-up legs, the
design of the frame as well as the apparatus used for suspension and preloading of the
model jack-up. The candidate performed the experiments, analysed the results and
wrote the paper under the supervision of Professor Mark Cassidy and Dr. Christophe
Gaudin.

iv
Paper 5
The paper presented in Chapter 7 is first-authored by the candidate and co-authored by
Professor Mark Cassidy, and has been submitted for publication as
Bienen, B. & Cassidy, M.J. (2007). Three-dimensional numerical analysis of
centrifuge experiments on a model jack-up drilling rig on sand. Canadian
Geotechnical Journal, submitted May 2007.
The candidate used the computer program developed in Chapter 4 to retrospectively
predict the experimental results discussed in Chapter 6. The candidate carried out the
numerical simulations, analysed and revised the numerical simulations as described in
the paper to better predict the experimental results and wrote the paper.
I certify that, except where specific reference is made in the text to the work of others,
the contents of this thesis are original and have not been submitted to any other
university.
(Britta Bienen)

v
PUBLICATIONS ARISING FROM THIS THESIS
JOURNAL PAPERS
Bienen, B. & Cassidy, M.J. (2007). Three-dimensional numerical analysis of centrifuge
experiments on a model jack-up drilling rig on sand. Canadian Geotechnical
Journal, submitted May 2007.
Bienen, B., Cassidy, M.J. & Gaudin, C. (2007). Physical modelling of the push-over
capacity of a jack-up structure on sand in the geotechnical centrifuge. Canadian
Geotechnical Journal, submitted May 2007.
Bienen, B., Gaudin, C. & Cassidy, M.J. (2007). Centrifuge tests of shallow footing
behaviour on sand under combined vertical-torsional loading. International
Journal of Physical Modelling in Geotechnics, Vol. 7, No. 2, pp. 1-21.
Bienen, B. & Cassidy, M.J. (2006). Advances in the three-dimensional fluid-structure-
soil interaction analysis of offshore jack-up structures. Marine Structures, Vol. 19,
No. 2-3, pp. 110-140.
Bienen, B., Byrne, B., Houlsby, G.T. & Cassidy, M.J. (2006). Investigating six degree-
of-freedom loading of shallow foundations on sand. Géotechnique, Vol. 56, No. 6,
pp. 367-379; discussion Vol. 57, No. 5, pp. 483–484.
Bienen, B. & Cassidy, M.J. 2006. Three-dimensional dynamic analysis of jack-up
structures. Journal of Advances in Structural Engineering, Vol. 9, No. 1, pp. 19-
37.

vi
CONFERENCE PAPERS
Bienen, B., Cassidy, M.J., Byron-Brown, J. & Byrne, B.W. (2006). Three-dimensional
modelling of offshore jack-up structures: An experimentally based research
strategy. Proc. Physical Modelling in Geotechnics – 6th ICPMG 2006 (Eds. Ng,
C.W.W., Zhang, L.M. & Wang, Y.H.), Hong Kong, Vol. 1, pp. 617-623.
Bienen, B. & Cassidy, M.J. (2005). Simulation of the soil-structure-fluid interaction of
offshore jack-up structures. Proc. 11th International Conference of IACMAG (Eds.
Barla & Barla), Turin, Italy, Vol. 3, pp. 603-610.
Bienen, B. & Cassidy, M.J. (2004). Three-dimensional analysis of jack-up structures.
Developments in Mechanics of Structures and Materials: Proc. 18th Australasian
Conference on the Mechanics of Structures and Materials (Eds. Deeks, A. & Hao,
H.), Perth, Vol. 1, pp. 345-351.
DATA REPORT
Bienen, B., Byrne, B.W. & Houlsby, G.T. (2005). Six degree-of-freedom loading of a
circular flat footing on loose sand: Experimental data. Report No OUEL 2289/05,
Department of Engineering Science, University of Oxford.

vii
ABSTRACT
Mobile offshore jack-up drilling rigs are not custom-designed for a particular location
but rated for typical operating characteristics, like water depths. They may be deployed
at a number of different sites during their design life. Under the current guidelines, the
jack-up is required to be assessed for its suitability for each new proposed location,
assuming environmental loading conditions due to wind, waves and current
corresponding to a 50-year return period storm applicable to the site. Traditionally,
these assessments have been performed in two dimensions, simplifying the jack-up to a
plane frame and the loading conditions to be in-plane with the rig’s ‘axis of symmetry’.
This thesis introduces a computer program, named SOS_3D, for the fluid-structure-soil
interaction analysis of jack-up response in three dimensions. Extensive experimental
series have been performed to provide evidence for the generalisation of the foundation-
soil interaction model to general six degree-of-freedom loading conditions and its
applicability to load paths and stress levels relevant to jack-up spudcans. These
experiments included (1) 1g single footing tests, (2) centrifuge single footing tests and
(3) centrifuge model jack-up tests. The latter tests highlighted differences in response
and mode of failure depending on the loading direction of the jack-up and re-iterated the
importance of three-dimensional modelling. The numerical program SOS_3D
introduced early in this thesis was shown to represent a useful tool for the prediction of
jack-up behaviour under general combined loading in three dimensions. It provided
reasonably good, conservative predictions of the experimentally measured jack-up
behaviour.

viii
ACKNOWLEDGEMENTS
I would like to express my gratitude towards my supervisors Professor Mark Cassidy
and Professor Mark Randolph for their guidance, helpful advice and support. I further
gratefully acknowledge the advice and support offered by Dr. Christophe Gaudin in
realising the centrifuge experiments. Thanks also to the technical team, without whom
the experiments presented in this thesis would not have been possible, and Wenge Liu,
who more than once rescued my computer from near death.
Further thanks go to Professor Guy Houlsby and Dr. Byron Byrne at Oxford University,
UK, for providing me with the opportunity of spending part of my PhD in Oxford,
which proved to change the focus of my research. The collaboration was very enjoyable
and the advice and discussions are much appreciated.
Last but certainly not least, financial support provided by the International Postgraduate
Research (IPRS) and Ad Hoc Scholarships is gratefully acknowledged.

ix
TABLE OF CONTENTS
ABSTRACT
ACKNOWLEDGEMENTS
NOTATION
CHAPTER 1 – INTRODUCTION
1.1 Mobile jack-up drilling rigs ............................................................................... 1.1
1.2 The need for further research ........................................................................... 1.2
1.3 Research aims...................................................................................................... 1.3
1.4 Thesis outline....................................................................................................... 1.5
1.5 References............................................................................................................ 1.6
CHAPTER 2 - BACKGROUND
2.1 Required models for jack-up analysis............................................................... 2.1
2.2 Previous jack-up analyses (case studies)........................................................... 2.2
2.3 Modelling components for jack-up analysis..................................................... 2.5
2.3.1 Environmental loads (wind, waves and current)...........................................2.5
2.3.2 Modelling of the structure.............................................................................2.6
2.3.3 Modelling of the foundation-soil interaction ................................................2.6
2.3.3.1 Early developments in plasticity modelling .......................................2.9
2.3.3.2 Strain-hardening plasticity model for three degrees-of-freedom.......2.9
2.3.3.3 Proposed extension of plasticity model to six degrees-of-freedom..2.16
2.4 Physical modelling of jack-up behaviour ....................................................... 2.18
2.5 Concluding remark........................................................................................... 2.21
2.6 References.......................................................................................................... 2.21

x
CHAPTER 3 - INVESTIGATING SIX-DEGREE-OF-FREEDOM LOADING OF
SHALLOW FOUNDATIONS ON SAND
Abstract......................................................................................................................... 3.1
3.1 Introduction ........................................................................................................ 3.2
3.2 Equipment ........................................................................................................... 3.6
3.2.1 The testing rig ............................................................................................... 3.6
3.2.2 The control program...................................................................................... 3.8
3.2.3 Load cell........................................................................................................ 3.9
3.2.4 Small LVDT system.................................................................................... 3.10
3.2.5 Soil characteristics ...................................................................................... 3.10
3.3 Experimental work ........................................................................................... 3.11
3.3.1 Yield surface ............................................................................................... 3.12
3.3.2 Hardening law............................................................................................. 3.18
3.3.3 Elasticity...................................................................................................... 3.20
3.3.4 Flow rule ..................................................................................................... 3.21
3.4 Numerical predictions ...................................................................................... 3.24
3.4.1 Radial displacement tests ............................................................................ 3.25
3.4.2 Swipe tests................................................................................................... 3.27
3.4.3 Swipe testing with changing displacement path ......................................... 3.29
3.5 Conclusion ......................................................................................................... 3.32
3.6 References.......................................................................................................... 3.33
CHAPTER 4 - ADVANCES IN THE THREE-DIMENSIONAL FLUID-
STRUCTURE-SOIL INTERACTION ANALYSIS OF OFFSHORE JACK-UP
STRUCTURES
Abstract......................................................................................................................... 4.1
4.1 Introduction ........................................................................................................ 4.2
4.2 The fluid-structure-soil interaction program SOS_3D ................................... 4.4
4.2.1 Introduction................................................................................................... 4.4
4.2.2 The structural model ..................................................................................... 4.5
4.2.2.1 The stiffness matrix ............................................................................ 4.6
4.2.2.2 The mass matrix ............................................................................... 4.12

xi
4.2.2.3 The damping matrix .........................................................................4.12
4.2.3 The soil-structure interaction model (ISIS).................................................4.13
4.2.4 The environmental loading model ..............................................................4.18
4.2.4.1 The wave loading model (WAVE3D) ...............................................4.18
4.3 Applications of SOS_3D................................................................................... 4.20
4.3.1 Overview of analyses ..................................................................................4.20
4.3.2 Quasistatic push-over analyses ...................................................................4.23
4.3.2.1 Horizontal push-over analyses.........................................................4.23
4.3.2.2 Torsional push-over analysis........................................................... 4.32
4.3.2.3 Summary .......................................................................................... 4.36
4.3.3 Dynamic analyses with wind, wave and current loading............................4.37
4.4 Conclusions........................................................................................................ 4.40
4.5 References.......................................................................................................... 4.41
CHAPTER 5 - CENTRIFUGE TESTS OF SHALLOW FOOTING BEHAVIOUR
ON SAND UNDER COMBINED VERTICAL-TORSIONAL LOADING
Abstract......................................................................................................................... 5.1
5.1. Introduction......................................................................................................... 5.2
5.2. Footing model formulation for the vertical-torsional plane ........................... 5.4
5.2.1. Yield surface .................................................................................................5.4
5.2.2. Elastic behaviour...........................................................................................5.6
5.2.3. Hardening law ...............................................................................................5.6
5.2.4. Flow rule .......................................................................................................5.7
5.3. Experimental apparatus..................................................................................... 5.8
5.4. Soil characteristics and sample preparation .................................................. 5.10
5.5. Experimental programme................................................................................ 5.10
5.6. Results and discussion ...................................................................................... 5.14
5.6.1. Cone penetrometer tests (CPT) ...................................................................5.14
5.6.2. Vertical bearing capacity.............................................................................5.15
5.6.3. Yield surface shape and size in the vertical-torsional plane .......................5.21
5.6.3.1 Explanation of change of yield surface size and shape....................5.24
5.6.3.2 Swipe experiments in torsional load–displacement space ...............5.25

xii
5.6.4. Flow in the vertical-torsional plane ............................................................ 5.26
5.6.5. Proportional hardening in the vertical-torsional plane................................ 5.30
5.6.6. Recommendation of parameter values for the footing model..................... 5.35
5.7. Conclusion ......................................................................................................... 5.36
5.8. References.......................................................................................................... 5.38
CHAPTER 6 - PHYSICAL MODELLING OF THE PUSH-OVER CAPACITY
OF A JACK-UP STRUCTURE ON SAND IN THE GEOTECHNICAL
CENTRIFUGE
Abstract......................................................................................................................... 6.1
6.1 Introduction ........................................................................................................ 6.2
6.2 Design of a model jack-up for experimental investigation in the beam
centrifuge ...................................................................................................................... 6.5
6.2.1 Design considerations for the model jack-up................................................ 6.5
6.2.1.1 The hull ............................................................................................ 6.11
6.2.1.2 The legs ............................................................................................ 6.11
6.2.1.3 The spudcan footings ....................................................................... 6.12
6.2.2 Instrumentation of the model jack-up ......................................................... 6.13
6.2.2.1 Load measurement ........................................................................... 6.13
6.2.2.2 Displacement measurement ............................................................. 6.14
6.3 Design of the loading apparatus ...................................................................... 6.15
6.3.1 Installation and preloading.......................................................................... 6.15
6.3.2 Horizontal loading....................................................................................... 6.17
6.3.3 Instrumentation of the loading apparatus.................................................... 6.18
6.3.3.1 Load measurement ........................................................................... 6.18
6.3.3.2 Displacement measurement ............................................................. 6.19
6.4 Centrifuge testing ............................................................................................. 6.19
6.4.1 Test set-up ................................................................................................... 6.20
6.4.2 Soil characteristics ...................................................................................... 6.22
6.4.3 Discussion of results ................................................................................... 6.22
6.4.3.1 Installation and preloading phase ................................................... 6.23
6.4.3.2 Horizontal loading (operational) phase .......................................... 6.27

xiii
6.5 Conclusion ......................................................................................................... 6.37
6.6 References.......................................................................................................... 6.38
CHAPTER 7 - THREE-DIMENSIONAL NUMERICAL ANALYSIS OF
CENTRIFUGE EXPERIMENTS ON A MODEL JACK-UP DRILLING RIG ON
SAND
Abstract......................................................................................................................... 7.1
7.1 Introduction......................................................................................................... 7.2
7.2 The analysis program SOS_3D.......................................................................... 7.4
7.2.1 The structural and environmental loading models ........................................7.5
7.2.2 The foundation-soil interaction model ..........................................................7.5
7.3 Jack-up model centrifuge tests .......................................................................... 7.7
7.3.1 The need for model jack-up centrifuge tests .................................................7.7
7.3.2 Overview of the model jack-up tests retrospectively analysed...................7.12
7.3.2.1 Testing procedure ............................................................................7.12
7.3.2.2 Measured loads and displacements .................................................7.13
7.4 Retrospective analysis of the jack-up centrifuge tests................................... 7.14
7.4.1 Prediction with currently recommended footing model parameters ...........7.15
7.4.1.1 Installation and preloading phase ...................................................7.15
7.4.1.2 Horizontal loading phase (operational)...........................................7.18
7.4.2 Analysis of footing model performance......................................................7.26
7.4.3 Numerical predictions with revised footing model parameters ..................7.32
7.4.4 Discussion on suggestions to improve the footing model predictions........7.35
7.5 Conclusion ......................................................................................................... 7.36
7.6 References.......................................................................................................... 7.37
CHAPTER 8 - CONCLUDING REMARKS
8.1 Introduction......................................................................................................... 8.1
8.2 Original contributions and main findings ........................................................ 8.1
8.2.1 Validation of force-resultant model for shallow circular foundations on sand
for six degrees-of-freedom............................................................................8.1

xiv
8.2.2 Development of integrated three-dimensional fluid-structure-soil analysis
program ......................................................................................................... 8.2
8.2.3 Validation of force-resultant model for large highly stressed shallow circular
foundations on sand through centrifuge experiments ................................... 8.3
8.2.4 Investigation of spudcan load paths and jack-up system behaviour in three
dimensions through centrifuge experiments ................................................. 8.5
8.2.5 Evaluation of performance of modelling techniques for the prediction of jack-
up behaviour.................................................................................................. 8.7
8.3 Recommendations for further research ........................................................... 8.8
8.3.1 Force-resultant footing model ....................................................................... 8.8
8.3.2 Cyclic loading and partial drainage .............................................................. 8.9
8.3.3 Investigation of alternative foundation options .......................................... 8.10
8.3.4 Investigation of jack-up behaviour on clay in three dimensions ................ 8.10
8.3.5 Increased flexibility of numerical package ................................................. 8.10
8.4 Conclusion ......................................................................................................... 8.11
8.5 References.......................................................................................................... 8.11

xv
NOTATION
Nomenclature used in thesis, excluding those which only appear once.
Roman
a Ellipse eccentricity (yield surface)
jb1 , jb2 Bowing functions (beam-column)
321 ,, ccc Radial hardening parameters
jc1 , jc2 Elastic stability functions
bjc Length correction factor (beam-column)
50d Grain size
f Yield surface expression
pf Limiting factor (hardening law)
g Plastic potential expression
32 ,, hhh Normalised horizontal load
0h Maximum normalised horizontal load
k Initial plastic stiffness (hardening law)
1k Hardening law parameter

xvi
qcmhv kkkkk ,,,, Elastic stiffness coefficients
32 ,, mmm Normalised moment
0m Maximum normalised moment
q Normalised torsion
0q Maximum normalised torsion
jq Axial force parameter (beam-column)
32 ,, uuu Horizontal displacement
v Normalised vertical force
w Vertical displacement
1w , 2w Hardening law parameters
pmw Vertical plastic penetration at peak vertical bearing capacity
x Normalised deviator force
z Total displacement
A Cross-sectional area
rD Relative soil density
E Young’s modulus
G Shear modulus

xvii
32 ,, HHH Horizontal force
I Second moment of area
J Polar moment of inertia
vK Vertical elastic stiffness
32 ,, MMM Moment
γN , qN Bearing capacity factors
Q Torsion
R Footing radius
V Vertical force
0V Maximum vertical force applied to foundation; preload
mV0 Peak value of vertical bearing capacity
0V ′ Vertical load associated with plastic potential
swV Vertical load due to self-weight
X Deviator force
Greek
α Loading direction
qmh ααα ,, Association factors for plastic potential

xviii
1221 ,, βββ Shaping parameters for the yield surface
43 ,ββ Shaping parameters for the plastic potential
γ Soil dry unit weight
minγ , maxγ Minimum, maximum soil dry density
cvφ , φ (Critical state) Friction angle
λ Plastic multiplier
32 ,, θθθ Rotation
σ Vertical stress applied on the foundation
ω Twist
ξ Displacement conjugate to deviator force
Subscripts
1, 2 Node number of a beam-column element
e elastic displacement component
min , max Minimum, maximum
p plastic displacement component
zyx ,, Coordinate axes

CHAPTER 1
1.1
INTRODUCTION
1.1 MOBILE JACK-UP DRILLING RIGS
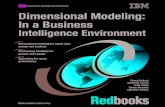
A typical jack-up rig (Figure 1.1a) features a buoyant, approximately triangular hull
supported by three independent truss-work legs, each of which rests on a large shallow
footing called a spudcan. These footings (Figure 1.1b) are usually roughly circular in
plan with conical undersides. A spigot may be used to facilitate initial location and to
provide additional resistance against sliding.
~20 m
Over 160m
About 20mAll dimensions approximate
Figure 1.1. a) Typical jack-up rig (after Reardon 1986), b) example spudcan footing
Jack-ups are floated to site with their legs elevated above the hull. On arrival at the
drilling site, the legs are lowered through the hull using the jacking system at the leg-
hull interface until the spudcan footings rest on the seabed. The hull is then slowly
jacked up on its legs, loading the footings vertically. The spudcans penetrate the soil
under the imposed weight and the hull is jacked up accordingly. This continues until the
spudcans bear the full self-weight of the rig. Sea water is then pumped into the hull’s
ballast tanks, adding weight to the system. This procedure is called preloading. During
the preload stage, the loading on the spudcan footings is predominantly vertical since
b) a)

Chapter 1
1.2
the installation procedure can only take place in calm weather. The preloading ballast is
held for some time, typically a minimum four hours but it can be up to 24 hours. After
preloading is completed, the ballast is shed and the hull is jacked clear of the water. In
the operational phase, the jack-up will not only be subjected to self-weight, but also to
environmental loads from wind, waves and current. This results in complex load paths
of combined vertical and horizontal loads, overturning moments and even torsion on the
foundations.
1.2 THE NEED FOR FURTHER RESEARCH
Unlike other types of offshore drilling rigs, jack-ups are mobile units that are typically
used at a dozen or more sites during their service life. Therefore, these rigs are not
custom designed for a particular site but rated for characteristics such as water depth
and maximum variable load (due to wind, waves and current). For each proposed site,
the suitability of the rig is required to be assessed. Such assessments are usually
conducted for 50-year return period storm conditions using the current guidelines, the
SNAME Technical and Research Bulletin 5-5A (2002). (An ISO international standard,
largely based on the SNAME documents, is currently being developed.)
Despite these site-specific assessments, jack-up rigs maintain a higher comparative
accident rate than fixed platforms (Hunt & Marsh 2004), with approximately one third
of jack-up accidents relating to foundation problems (HSE 2004). Clearly, there is need
for better prediction tools for the site-specific assessment of these units. Further, as the
trend continues to employ jack-ups for drilling in deeper water, the units are exposed to
increasingly harsher environments. This stresses the need for improved understanding
of jack-up behaviour. It is argued that by improving the accuracy of the models used to
predict the response, the accident rate of jack-ups can be reduced.

Introduction
1.3
1.3 RESEARCH AIMS
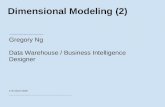
For computational ease, two-dimensional modelling techniques are still often used in
the prediction of jack-up response, reducing the problem to a plane-frame analysis along
the system’s ‘axis of symmetry’ (Figure 1.2). This does not allow for consideration of
any other loading direction or combination (wind, waves and current may not be
collinear), spatial variation of soil properties or seabed level, or even rigs that are
geometrically or structurally not symmetric, for instance. It is therefore highly desirable
to develop models for the prediction of jack-up response in three dimensions.
V
2R
H
M
H2 2
M2
V
2R
1
Q
H33
M3
One leg Two legs Two legsOne leg
Idealisation along‘axis of symmetry’
‘Axis of symmetry’
a) Idealisation b) Structural model c) Footing model
Figure 1.2. Jack-up modelling in two and three dimensions.

Chapter 1
1.4
Numerical modelling of a jack-up unit during its operational phase must take into
account the environmental loading applied by wind, waves and current, the jack-up
structural configuration as well as the foundation-soil interaction. The latter plays a key
role in the prediction of the overall response of the jack-up for serviceability as well as
ultimate capacity. This is because the footing stiffness significantly influences the
system stiffness and thereby the load paths. The footing capacity and mode of failure on
the other hand depend on the path of combined loads transferred to the foundation.
A numerical program that takes into account the interrelated nature of such a fluid-
structure-soil system and provides an integrated approach to the prediction of jack-up
response is introduced in this thesis. It is named SOS_3D, for ‘Simulation of Offshore
Structures in 3D’. Due to the importance of accurate modelling of the footing load-
displacement behaviour in the simulation of jack-up response, the development
presented in this thesis is strongly underpinned by extensive experimental work to
improve understanding of the response of shallow circular foundations under general
combined loading.
Therefore to significantly advance three-dimensional analysis of jack-up platforms, the
aims of the research covered in this thesis are:
1. Validation of a state-of-the-art footing model for predicting shallow footing
behaviour under loading in six degrees-of-freedom and derivation of
appropriate model parameters through experimentation.
2. Development of a three-dimensional analysis program that combines fluid-
structure-soil interaction and detailed discussion of example simulations to
highlight the importance of conducting three-dimensional analysis of jack-
ups.

Introduction
1.5
3. Investigation of the load paths experienced by spudcan footings under
combined loading in three dimensions through experimentation on a model
jack-up rig in a geotechnical centrifuge.
4. Investigation of the appropriateness of this footing model, developed through
single footing experiments, for load paths followed in a multi-footing system
such as a jack-up.
1.4 THESIS OUTLINE
The thesis systematically works through the following steps in order to arrive at each of
the research aims:
Chapter 2 provides background information to the areas concerning the numerical
modelling of jack-ups (environmental load, structure and foundation) as well as physical
modelling of circular shallow footings and full three-legged jack-ups.
Chapter 3 is concerned with the extension of an existing footing model from two to
three dimensions. An extensive series of experiments subjecting a shallow circular
foundation to six degree-of-freedom loading provided data to validate the proposed
model formulation and best fit its parameters. Retrospective numerical simulation of the
measured response is also provided.
This footing model, as well as appropriate structural and environmental loading models,
are implemented into a finite element program for the integrated numerical analysis of
jack-up response in three-dimensional space. Details of the program and example
simulations of a generic jack-up rig are provided in Chapter 4.
Chapters 5 and 6 complete the model validation through experiments performed in a
geotechnical centrifuge, thereby enabling the observation of jack-up behaviour under

Chapter 1
1.6
stress conditions as experienced by prototypes in the field. This development was
approached by conducting single footing tests first, which are reported and discussed in
Chapter 5, before developing and testing a full three-legged model jack-up. The latter is
described in Chapter 6.
Chapter 7 closes the development with retrospective analyses of the jack-up
experiments (Chapter 6) with the numerical program introduced in Chapter 4.
This leads to concluding remarks as well as recommendations for further research,
which form Chapter 8.
1.5 REFERENCES
HSE (Health and Safety Executive) (2004). Guidelines for jack-up rigs with particular reference to foundation integrity. Research Report 289.
Hunt, R.J. & Marsh, P.D. (2004). Opportunities to improve the operational and technical management of jack-up deployments. Marine Structures, Vol. 17, No. 3–4, pp. 261–73.
Reardon, M.J. (1986). Review of the geotechnical aspects of jack-up unit operations. Ground Engineering, Vol. 19, No. 7, pp. 21-26.
SNAME (Society of Naval Architects and Marine Engineers) (2002). Site specific assessment of mobile jack-up units, SNAME Technical and Research Bulletin 5-5A. 1st Ed., 2nd Revision, New Jersey.

CHAPTER 2
2.1
BACKGROUND
2.1 REQUIRED MODELS FOR JACK-UP ANALYSIS
This thesis aims at significantly advancing the analysis options available for the
simulation of jack-up drilling rigs through developing techniques for the full three-
dimensional simulation of jack-up units under wind, wave and current loading. These
were coded as a numerical program comprising all three areas of
• environmental loading
• structure
• footings.
These areas are interrelated in a jack-up analysis as hydrodynamic loading due to waves
and current influences system mass and system damping, while the load itself gives rise
to the P-Δ effect. Footing stiffness plays a crucial role in the overall system behaviour of
a jack-up as will be shown later. (The footing mass is constant and soil damping is
neglected in this thesis.) Therefore, these components cannot be analysed separately.
The program introduced in this thesis provides an integrated approach to jack-up
analysis with all models constituting the program developed to a similar level of
sophistication.
In this chapter, modelling techniques used to date for the analysis of jack-up rigs are
discussed to provide background information relevant to this thesis.

Chapter 2
2.2
2.2 PREVIOUS JACK-UP ANALYSES (CASE STUDIES)
The comparison of measured field data and numerical predictions is an important
avenue in the verification and improvement of models and analysis techniques.
Obstacles, however, include quality as well as confidentiality of the measured data.
Further, the relevant environmental loading conditions are not always known in full,
adding uncertainty in any retrospective analysis. This section briefly summarises some
recent case studies. The selection of publications emphasizes the wide range of
modelling techniques and assumptions employed in the jack-up analyses.
Stock et al. (2000) analysed two of LeTourneau’s jack-ups, 116-C and 82-SD-C, which
were operating in the Gulf of Mexico as Hurricane George struck. Although this storm
imposed severe environmental conditions on the two rigs, neither exhibited any
evidence of structural damage at the critical leg-hull connection. However, both jack-
ups had settled more than 0.5 m on all spudcans, which were only partially embedded
on the sand sites before the storm. The retrospective analyses were performed using
hindcast storm predictions and measured data in three hour random sea simulations, in
which the current provided the largest uncertainty. Structural modelling included non-
linear effects. Footing conditions considered included those outlined in the guidelines,
SNAME (1997). Contrary to expectations, in which the rigs would withstand 10 year
return period storm conditions but fail in Hurricane George (a 30 to 35 year event) and
in a 50 year storm, using the SNAME procedures the jack-ups were predicted to fail in
all three storm conditions. This indicates that the SNAME recommendations
underestimate the restraint provided by the spudcans on this site.
A study concerning the Maersk Endurer jack-up (HSE 2001), deployed at the
Shearwater field, inferred foundation fixity in the field to be 20 times greater than the

Background
2.3
stiffness determined using SNAME (1997) recommendations for two storms equivalent
to a return period of about 20 years. The analysis employed a detailed structural model
assuming appropriate stiffness in the leg-hull connection. No wind or current load was
considered. Wave spreading was not included. The study concluded uncertainty in
foundation fixity to have far greater influence on the rig’s displacements than
uncertainty in the actual wave loading conditions experienced by the jack-up.
Data available for Global Santa Fe’s Magellan, operating in the North Sea, for the
analyses by Nelson et al. (2001) included the wave surface elevation, wind speed and
direction, horizontal hull motion, the jack-up’s elevated hull weight, the hull centre of
gravity, weather conditions as observed, the condition of the rack chocks, and relevant
hull operations. Using an equivalent beam structural model, with leg-hull stiffnesses
taken from the detailed site assessments carried out previously, the dynamic time
domain analyses included the effects of geometric non-linearity as well as the random
nature of storm loading. The predominant wave direction was assumed to be the same
as the mean wind direction. Footing conditions considered included pinned, fixed and
linear foundation springs as in SNAME (1994) and SNAME (1997), the latter of which
suggesting higher stiffness values. Nelson et al. (2001) concluded that the highly non-
linear soil rotational and horizontal stiffnesses, which may be underestimated by the
current guidelines, have a significant effect on the jack-up response. Further,
conservatism will be introduced when estimating stiffnesses for actual, anisotropic and
non-homogeneous soil conditions as the guidelines for the estimation of small-strain
elastic stiffnesses apply to homogeneous isotropic soil conditions.
The Magellan had been monitored for five winter seasons when Nataraja et al. (2004)
carried out another study. Two to three storms per winter season were selected for these

Chapter 2
2.4
analyses. These represented approximately 40 % of the 50-year load value. This study
also concluded that the SNAME (2002) predicted soil stiffnesses were overly
conservative, which may severely limit the operating envelope for these units.
Analyses by Cassidy et al. (2002) of case records of three different jack-ups at a total of
eight different locations in the Central North Sea reached similar conclusions,
recommending higher stiffness values than suggested in SNAME (1997). These
included a variety of soil conditions, water depths and sea states. The simulations were
performed using an analysis program called JAKUP developed in house (Thompson
1996; Williams et al. 1998; Cassidy 1999; Martin & Houlsby 1999). The model
employed equivalent structural members with rigid leg-hull connections and strain-
hardening plasticity for the footings. The numerical analyses took into account effects
due to geometric non-linearity and shear deformation of the structure and were
performed as random time domain simulations of one-hour segments of selected storms.
However, the analyses were carried out in two dimensions, simplifying the jack-up
structure to a plane frame and assuming the environmental load to act along the rig’s
‘axis of symmetry’. Further, studies of harsher environmental conditions were suggested
as the storms considered were relatively mild.
Although employing various modelling techniques and assumptions concerning the
different components of a jack-up analysis, all of these case studies reported greater
restraint at the spudcans than predicted when using the guidelines, SNAME (1994,
1997, 2002). Improved understanding of jack-up behaviour will help to reduce
overconservative assumptions. However, as it will be based on better judgement, it will
only enhance the predicted operational envelope of jack-ups where appropriate, thus
reducing the accident risk.

Background
2.5
2.3 MODELLING COMPONENTS FOR JACK-UP ANALYSIS
The following sections will briefly introduce existing models used in jack-up analysis,
addressing the three components of environmental loading, the structure as well as the
rig’s shallow foundations.
2.3.1 Environmental loads (wind, waves and current)
Environmental loads on offshore structures are caused by waves, current and wind. The
latter two vary slowly compared to the natural periods of jack-up oscillations (Williams
et al. 1998) and can therefore be treated as steady phenomena. Waves, however, occur
at periods likely to excite significant dynamic response. Their time-dependent properties
must therefore be modelled realistically.
Wave models of various levels of sophistication exist, ranging from regular wave
theories to full random time-domain analysis of the sea. Although the latter certainly
yields the most accurate prediction of wave forces on a jack-up, it is more time-
consuming and not pursued in this thesis. Regular wave theories such as Airy or Stokes
V, on the other hand, fail to give a representative dynamic response as all wave energy
is assumed to be concentrated in one frequency component rather than the broad
spectrum of the ocean environment.
NewWave (Tromans et al. 1991) represents an alternative to both regular wave and full
random time domain simulations. It is suitable for jack-up analysis as it accounts for the
spectral composition of the sea while its deterministic nature allows it to be
implemented into structural analysis programs, thereby enabling an integrated approach
to jack-up analysis.

Chapter 2
2.6
NewWave, representing current state-of-the-art, is implemented into the novel three-
dimensional program developed in this thesis. However, as this thesis does not focus on
the development of wave theories, further detail will not be given here but can be found
in Cassidy (1999) as well as Cassidy et al. (2001) and Chapter 4 of this thesis. Current
velocity is assumed constant, as is the current profile with depth. Wind loading is
applied by point loading on the structure.
2.3.2 Modelling of the structure
Since the focus of model development here is the overall assessment of jack-up
response under environmental loading conditions, rather than the detailed structural
assessment of individual members of the rig, an explicit discretisation approach of the
rig using finite plate, shell and strut elements is not appropriate. Instead, the modelling
technique of equivalent structural members will be employed as suggested in SNAME
(2002) using elements called ‘beam-columns’. These are described in structural
literature (for two and three-dimensional applications, respectively) and are cited in
Chapter 4 as appropriate.
Although detailed structural modelling is out of proportion to the aim pursued here,
geometric non-linearity of the structure is important in jack-up analysis due to the large
leg length of the structure (SNAME 2002) and therefore needs to be taken into account.
2.3.3 Modelling of the foundation-soil interaction
As one of the major aims of this thesis is the development and validation of a footing
model that is appropriate for implementation in a jack-up analysis program, this section
will be more detailed than the previous ones.

Background
2.7
Accurate modelling of spudcan behaviour is crucial to the prediction of jack-up
response as the restraint provided by the footings influences the overall response of the
system to any loading situation. Rotational footing restraint reduces bending moments
in the leg-hull connections, the magnitude of hull motions as well as the likelihood of
dynamic excitation through the ocean environment by shortening the rig’s natural
period and hence expands the operating envelope of the unit (Nelson et al. 2001;
Nataraja et al. 2004). In other words, underestimation of foundation fixity may lead to
rejection of a jack-up for a particular site even though in reality it will not fail in the
design storm conditions. Howarth et al. (2004) also commented on the predicted jack-up
response being highly dependent on the foundation modelling method used. Further,
smaller hull motions enable operations in close proximity to fixed platforms to be
conducted with greater safety (Nelson et al. 2001).
Earlier jack-up analyses have often assumed simple footing models such as pinned, i.e.
infinite vertical and horizontal but no rotational stiffness, or (linear) springs (Brekke et
al. 1990; Karunakaran et al. 1992; Morandi et al. 1998). These footing assumptions
oversimplify foundation behaviour but may not even yield conservative results
(Williams et al. 1998; Cassidy et al. 2001). Reasons for this lie in the non-linearity of
the response, and importantly, deformation at the footings as the soil is not infinitely
stiff in any direction (sliding or plunging failure). Any footing assumption with infinite
vertical stiffness (as in Dean et al. 1995, for example), cannot account for differential
settlement between the spudcans, which may occur during a storm. Therefore, in order
to predict the response of the system accurately, the load-displacement behaviour of the
footings is required to be included in any overall numerical model for the analysis of
structures like jack-ups rigs.

Chapter 2
2.8
The SNAME (2002) guidelines separate the required checks with respect to footing
penetration during preloading and foundation stability after preloading into several
steps.
1) Prediction of footing penetration during preloading using bearing capacity
theory. The spudcan is modelled as a flat circular foundation.
2a) Preload and sliding check (of the windward leg), no moment load assumed
at the footings.
2b) Bearing capacity check with rotational, vertical and translational foundation
stiffness. This check still only considers vertical and horizontal (sliding)
capacities, but the amount of rotational fixity is used to modify beneficially
the forces in both the foundation and the structure.
However, SNAME (2002) suggests plasticity theory as the preferred footing
modelling technique, if foundation fixity is to be included directly in a time-
domain analysis, explained as a yield surface approach with initially linear
but non-linearly reducing stiffness at yield. For partially embedded spudcans
on silica sand, additional vertical penetration may be considered. No other
displacement direction is considered at this stage.
3) Displacement calculations from a full non-linear load-displacement
foundation model.
Note that although the interaction of loads and the associated displacement are
recognised as important, any higher level check need only be performed if the lower
level check fails.

Background
2.9
2.3.3.1 Early developments in plasticity modelling
Meyerhof (1953), Hansen (1970) and Vesic (1973, 1975) modified Terzaghi’s (1943)
bearing capacity equation by a number of empirical factors to account for foundation
shape and load eccentricity in plane. However, this approach provides an estimate of the
ultimate bearing capacity only. A load-displacement relationship, on the other hand, can
be used to predict serviceability as well as ultimate capacity. It further has the advantage
of being amenable to numerical analysis.
Roscoe & Schofield (1956) pioneered the concept of a yield surface to view combined
loading in soil-structure interaction problems. Butterfield & Ticof (1979) developed this
concept further but Schotman (1989) was the first to propose a complete incremental
force-resultant model based on plasticity theory for spudcan footings. The model was
successfully incorporated into an analysis of jack-up behaviour. The results highlight
the importance of displacement considerations and of analysis of the rig as a system
since the individual spudcans are linked by the superstructure. Thus, loads may be re-
distributed between the footings and yield does not necessarily imply failure.
2.3.3.2 Strain-hardening plasticity model for three degrees-of-freedom
Since then, further development in the modelling of the load-displacement behaviour of
shallow footings like spudcans based on strain-hardening plasticity theory has advanced
this technique to represent the current state-of-the-art. These models, formulated in
terms of force resultants, can be implemented into conventional analysis programs, with
the advantage that no soil continuum elements or special interface elements between the
structure and the soil are required. The entire soil-footing interaction is encapsulated
into a point element which can be attached to structural nodes of a numerical jack-up
model, for instance.

Chapter 2
2.10
A suite of such models has been formulated for clay, dense silica sand and loose
uncemented carbonate sand. The models cater for circular flat and conical footings, with
spudcans being modelled as equivalent cones of the same radius and volume as the
embedded section of the spudcan, as well as suction caissons, another type of shallow
offshore foundation.
The clay model, proposed by Martin (1994) and Martin & Houlsby (1999, 2001) was
developed based on an extensive series of experiments on a 125 mm spudcan footing on
soft heavily overconsolidated Speswhite kaolin clay (Martin & Houlsby 2000). The tests
were carried out on the laboratory floor (at 1g) and comprised loading combinations in-
plane. Similar experiments on a 100 mm circular flat footing on dense silica sand were
performed for the development and validation of the sand model (Gottardi et al. 1999;
Cassidy 1999; Houlsby & Cassidy 2002). With only minor adaptations, this model was
also shown to capture the response on loose uncemented carbonate sand (Byrne &
Houlsby 2001; Cassidy et al. 2002).
Houlsby (2003) and Cassidy et al. (2004) provide an overview of the models, which
have been coded numerically under the name ISIS. Implemented into the analysis
program JAKUP (Thompson 1996; Williams et al. 1998; Cassidy 1999 and Martin &
Houlsby 1999), these force-resultant footing models have been applied to simulate
monitored offshore jack-up data (Cassidy et al. 2002b). The analyses were performed in
two dimensions since JAKUP was coded for plane frame analysis and the plasticity
footing models were developed for the three degrees-of-freedom in plane only
(Figure 2.1).

Background
2.11
V, w
2R
H, u
M, θ
Figure 2.1. Sign convention for a foundation under loading in three degrees-of-freedom, after
Butterfield et al. (1997).
The following sections provide further detail on the four characteristic features of the
strain-hardening plasticity footing model:
1. an expression for the yield surface,
2. a description of the elastic behaviour for load states within the yield surface,
3. a strain-hardening function defining the evolution of the yield surface, and
4. a flow rule that describes the incremental plastic displacements at yield.
Although very similar for clay and sand, the model features subtle differences for the
different soils. Only the formulation for sand is given here. The notation and sign
convention used for the loads and their conjugate displacements is given in Figure 2.1.
2.3.3.2.1 Yield surface
The experimental evidence suggests the yield surface, shown in Figure 2.2, to be
parabolic in any plane including the vertical axis and to take the shape of a rotated
ellipse in the horizontal-moment plane (Butterfield & Ticof 1979; Gottardi et al. 1999;
Byrne & Houlsby 2001). The shape of the yield surface is assumed to remain constant
while it expands according to the hardening law (Houlsby 2003; Cassidy et al. 2004).

Chapter 2
2.12
V
H
M/2R
Figure 2.2. Yield surface in VHM space (after Houlsby & Cassidy 2002).
Due to the constant shape, the formulation of the yield surface can be normalized by 0V ,
the vertical bearing capacity at any given depth, such that the following equation is
obtained:
2000
2
00
2
00
2/22/Vmh
RHMaVm
RMVh
Hf −⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
( )( )01
21
21
212
0
2
0
2
21
21 =⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡ +−
+ ββ
ββ
ββ
ββββ
VV
VV
(2.1)
The parameters 0h and 0m define the size of the yield surface in the horizontal and
moment directions, respectively, while a determines the eccentricity of the ellipse. The
parameters 1β and 2β have been introduced to round off the yield surface at 0/ 0 =VV
and 1/ 0 =VV . For 21 ββ ≠ , the peak of the yield surface does not occur at 5.0/ 0 =VV .
A summary of the yield surface parameters is provided in Table 2.1.
2.3.3.2.2 Elastic behaviour
Inside the yield surface, the load-displacement relation is assumed to be entirely elastic,
with loads and displacement increments related by:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
e
e
e
hc
cm
v
duRddw
kkkk
kGR
dHRdM
dVθ2
00
0022/ (2.2)

Background
2.13
where G is the representative shear modulus (Cassidy et al. 2004). The elasticity
coefficients vk , mk , ck and hk have been established numerically using the finite
element method (Bell 1991; Ngo-Tran 1996; Doherty & Deeks 2003).
2.3.3.2.3 Hardening law
The bearing capacity of the soil generally increases with footing penetration. The
variation of bearing capacity under purely vertical load with vertical plastic penetration
of the footing into the soil defines the hardening law of the model (and thus the yield
surface expansion). For a spudcan on dense silica sand, the following expression was
proposed (Cassidy et al. 2004):
( )
( )m
pm
p
pm
p
m
pmp
pm
pp
m
pp
V
ww
ww
Vkw
f
ww
fVkw
fV 02
0
2
00
211
1
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−−
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
= (2.3)
where pf is a dimensionless constant describing the limiting magnitude of vertical load,
k the initial plastic stiffness, pw the plastic component of vertical displacement, mV0
the peak value of 0V and pmw the vertical plastic penetration at that peak.
For loose uncemented carbonate sand, however, experimental evidence showed that the
plastic displacement components of all degrees-of-freedom contribute to yield surface
hardening (Byrne & Houlsby 2001). The following hardening law was suggested
(Cassidy et al. 2002), but not coded in the ISIS numerical models:
p
pp
xkxkcx
V++
=1
22
0 (2.4)
with

Chapter 2
2.14
pppp RCuCwx θ221 ++= (2.5)
Suggested values for the parameters c , 1k , 2k , 1C and 2C are given in Table 2.1.
2.3.3.2.4 Flow rule
For both clay and sand, the incremental direction of plastic displacement was observed
to be normal to the yield surface in the horizontal-rotational plane (known as associated
flow). However, non-associated flow behaviour, where the plastic displacement
increments are not perpendicular to the yield surface, was found in the other planes
(Gottardi et al. 1999; Martin & Houlsby 2000, 2001; Cassidy et al. 2002).
For sand, a plastic potential was proposed similar to the yield surface but scaled by non-
association parameters (Cassidy 1999), expressed as
2000
2
00
2
00 '2/2
'2/
' VmhRHMa
VmRM
VhHg
mhmh αααα−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
( )( )
0'
1'
43
43
432
0
2
0
2
43
43 =⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡ +−
+ ββ
ββ
ββ
ββββ
VV
VV
(2.6)
Since the degree of non-association was found to differ in the horizontal and moment
planes, two factors hα and mα were introduced, given by
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=∞
p
p
p
phh
h
wu
k
wu
k
'
' 0 ααα (2.7)
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=∞
p
p
p
pmm
m
wR
k
wR
k
θ
θαα
α2
'
2' 0
(2.8)

Background
2.15
The parameters 3β and 4β allow different curvature of the plastic potential compared
to the yield surface. 0V ′ is a dummy parameter indicating the abscissa value on the
vertical load axis such that the intersect of the plastic potential with the yield surface
coincides with the current load point. Parameter values are provided in Table 2.1.
2.3.3.2.5 Parameter value overview
The best fit parameter values of the experimental data for dense silica and loose
uncemented carbonate sands, respectively, are summarised in Table 2.1.
Model component
Parameter Dense silica sand (Cassidy 1999;
Houlsby & Cassidy 2002; Cassidy et al. 2004)
Loose carbonate sand (Byrne & Houlsby 2001;
Cassidy et al. 2002)
0h 0.116 0.1505
0m 0.086 0.089
a -0.2 -0.3
1β 0.90 0.75
Yield surface
2β 0.99 0.75
Hardening law
pf = 0.8
k = 2175 N/mm
pmw = 3.16 mm
c = 700 N
1k = 50 mm
2k = 48 N/mm
1C = 0.5, 2C = 0.2
3β 0.55 0.82
4β 0.65 0.82
'k 0.125 0.275
0hα 1.0 1.0
∞hα 2.50 3.25
0mα 1.0 1.0
Plastic potential
∞mα 2.15 2.6
Table 2.1. ISIS parameters for dense silica and loose uncemented carbonate sands.

Chapter 2
2.16
2.3.3.3 Proposed extension of plasticity model to six degrees-of-freedom
Martin (1994) proposed the extension of the yield surface to cater for all six degrees-of-
freedom in space (Figure 2.3), arguing that for reasons of symmetry there could be no
terms in 32HH , 32MM , 22MH , 33MH nor any cross-terms involving torque.
2000
32
2
00
3
2
00
22
000
23
2
00
2
2
00
3 2/22/2/22/Vmh
RMHaVm
RMVh
HVmh
RMHaVm
RMVh
Hf +⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
( )( )
012/ 21
21
212
0
2
0
2
21
21
2
00
=⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡ +−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+ ββ
ββ
ββ
ββββ
VV
VV
VqRQ
(2.9)
The yield surface size parameter in the torsional direction was derived to be 05.00 ≈q
for clay (Martin 1994).
H2, u2 2
M2, θ2
V, w
2R
1
Q, ω
H3, u3
3
M3, θ3
Figure 2.3. Sign convention for a foundation under loading in six degrees-of-freedom, after
Butterfield et al. (1997).
Cassidy & Bienen (2002) completed this proposed extension by also formulating the
elastic behaviour and plastic potential for six degrees-of-freedom as

Background
2.17
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
e
e
e
e
e
e
mc
mc
q
ch
ch
v
RdRdRddududw
kkkk
kkk
kkk
GR
RdMRdM
RdQdHdHdV
3
2
2
3
2
3
2
3
2
222
00000000000000000
000000000
2
2/2/
2/
θθω (2.10)
2000
23
2
00
2
2
00
3
'2/2
'2/
' VmhRMHa
VmRM
VhHg
mhmh αααα−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
2
002000
32
2
00
3
2
00
2
'2/
'2/2
'2/
' ⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
VqRQ
VmhRMHa
VmRM
VhH
mhmh αααα
( )( )
0'
1'
43
43
432
0
2
0
2
43
43 =⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡ +−
+ ββ
ββ
ββ
ββββ
VV
VV
(2.11)
However, this was a theoretical extension only as no experimental evidence was
available to validate this footing model for the load-displacement behaviour of shallow
circular foundations under combined loading in six degrees-of-freedom.
Since then, experiments have been performed in the vertical-torsional plane on a flat
circular footing on loose and dense silica sand, respectively (Cheong 2002). These
suggested the yield surface size 0q to take the constant value of 0.029 for loose sand but
vary for dense sand according to
⎥⎥⎦
⎤
⎢⎢⎣
⎡−=
peakpeak V
Vqq 000 ln1 (2.12)
where peakV is the maximum vertical load capacity and 0234.00 =peakq is the yield
surface size in the torsional direction at peak bearing capacity.
Unfortunately, nearly all of the experiments concentrated on deriving the yield surface,
with only one test investigating flow behaviour. However, this one experiment did show

Chapter 2
2.18
plastic flow in the vertical-torsional plane to be non-associated (Cassidy & Cheong
2005). A non-association parameter similar to those in the horizontal and moment
directions was proposed, expressed as
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=∞
p
p
p
pqq
q
wR
k
wR
k
ω
ωαα
α2
'
2' 0
(2.13)
with 0.2=∞qα based on the test results and the parameters 'k and 0qα assumed the
same as in the horizontal and moment directions (i.e. 125.0'=k , 0.10 =qα ).
Therefore, although some progress has been made towards advancing the footing model
to six degrees-of-freedom, much is left to be done in its validation. Especially the
footing behaviour under load combinations out-of-plane requires experimental
investigation. Further, the majority of experimental evidence to date provides
information about the yield surface shape and size. Far less data is available on flow
behaviour. Particularly, experimental data on flow behaviour in load spaces involving
torsion is desirable. Another important question is the applicability of the footing model
to the high stress levels at prototype scale as most of the experiments performed to date
were restricted to low stresses applied at 1g.
Only when fully validated can these models be used with confidence in the prediction of
jack-up response.
2.4 PHYSICAL MODELLING OF JACK-UP BEHAVIOUR
Although validation against field data allows critical assessment of model
appropriateness and performance, scaled model laboratory tests represent a useful

Background
2.19
complement. In the latter, the testing conditions are carefully controlled resulting in
minimal uncertainty, which in turn facilitates evaluation of model performance and
assessment of areas requiring further development.
Section 2.3.3 highlighted the need for experiments to validate the footing model for six
degree-of-freedom. However, the load or displacement paths prescribed in such tests are
carefully selected to provide information about the model components (yield surface,
elastic behaviour, hardening law and flow rule) rather than follow load paths similar to
those experienced by jack-up spudcans. Further, in a multi-footing system, load
redistribution between individual footings may take place. Validation of the numerically
predicted load paths against those measured in a rig represents the final step in
establishing the footing model as part of the numerical assessment of jack-up behaviour.
For this purpose, model scale physical experiments are most suitable. The following
summarizes previous tests on three-legged jack-up models investigating the footing
behaviour and load paths.
On sand, physical experiments have been performed at Cambridge University, first in
the drum centrifuge (Murff et al. 1991 (loose sand); Murff et al. 1992 (loose and dense
sand); Tsukamoto 1994 (dense sand)) and later in the beam centrifuge (Dean et al. 1995
(medium dense sand); Hsu 1998 (medium dense to dense sand)). The model jack-up
was installed and preloaded in flight. Thereafter, monotonic horizontal push-over load
or cyclic horizontal load was applied at hull level by cables connecting to actuators on
the support frame. Both vertical and horizontal applied loads were measured as well as
the hull displacements and rotation. The spudcan reactions were also recorded.
Observations included decreasing footing stiffness with increasing push-over load
(Murff et al. 1991), non-linear hysteretic response (Dean et al. 1995) and the different

Chapter 2
2.20
load paths of the footings (Tsukamoto 1994; Hsu 1998), in particular the influence of
the different vertical loading conditions on the windward and leeward leg load paths,
respectively. In the push-over, two critical conditions were identified, lift-off or sliding
of a spudcan.
The tests by Murff et al. (1991), Murff et al. (1992) and Tsukamoto (1994) investigated
drained behaviour. Dean et al. (1995) and Hsu (1998) extended the measurement
programme to include the monitoring of pore-pressure generation and dissipation. The
medium dense to dense sand was saturated with silicone oil for this purpose. Similar
experiments on clay were reported by Murff et al. (1992) and Dean et al. (1996, 1998).
Although this series of tests has provided valuable insight into the load paths generated
for the spudcan footings when the jack-up is loaded horizontally as well as vertically
(noting comments by Hsu (1998) on how difficult it would be to obtain similar data in
the field), there are several areas which require further research. Firstly, the model
represented a rather small prototype and may therefore not be representative of current
field jack-ups. This may influence the footing load paths significantly and even produce
different behaviour of the system overall. Secondly, in all of the above tests, the
horizontal load was applied along the jack-up’s ‘axis of symmetry’, thus considering
planar VHM loading only.
Vlahos (2004) developed a taller, more slender and flexible model jack-up at a scale of
1:250 to a generic prototype for testing at 1g, shedding further light on the footing load
paths, ultimate system capacity as well as hull and footing displacements at failure. The
load redistribution among the spudcan footings was noted to increase the overall system
capacity through redundancies in the failure mechanism. Even after one footing had
reached peak capacity, additional push-over load could be sustained by the system

Background
2.21
before eventual failure. The study further investigated the influence of the preload level
and the leg length (therefore indirectly the bending stiffness) on the response.
However, these experiments were performed on heavily overconsolidated soft clay and
therefore cannot be utilised in this study as it is concerned with jack-up behaviour on
sand. Further, as in the tests undertaken by the Cambridge group, only planar VHM
loading was accounted for. Thus, further investigation of jack-up behaviour is required
to account for loading directions other than along the ‘axis of symmetry’. These will
further contribute to the validation of jack-up modelling techniques.
2.5 CONCLUDING REMARK
This chapter has provided a short summary of relevant background information, setting
the scene for the experimental and numerical work outlined in the following chapters.
2.6 REFERENCES
Bell, R.W. (1991). The analysis of offshore foundations subjected to combined loading. MSc. thesis, University of Oxford.
Brekke, J.N., Campbell, R.B., Lamb, W.C. & Murff, J.D. (1990). Calibration of jackup structural analysis procedure using field measurements from a North Sea jack up. Offshore Technology Conference (OTC), Houston, Texas, OTC 6465.
Butterfield, R. & Ticof, J. (1979). Design parameters for granular soils. Proc. 7th ECSMFE, Brighton, UK, pp. 259-261.
Byrne, B.W. & Houlsby, G.T. (2001). Observations of footing behaviour on loose carbonate sands. Géotechnique, Vol. 51, No. 5, pp 463-466.
Cassidy, M. J. (1999). Non-linear analysis of jack-up structures subjected to random waves. DPhil. thesis, University of Oxford.
Cassidy, M.J. & Bienen, B. (2002). Three-dimensional numerical analysis of jack-up structures on sand. Proc. 12th International Offshore and Polar Engineering Conference, Kitakyushu, Japan.
Cassidy, M.J., Byrne, B.W. & Houlsby, G.T. (2002a). Modelling the behaviour of circular footings under combined loading on loose carbonate sand. Géotechnique, Vol. 52, No. 10, pp. 705-712.
Cassidy, M.J. & Cheong, J. (2005). The behaviour of circular footings on sand subjected to combined vertical-torsion loading. International Journal of Physical Modelling in Geotechnics, Vol. 5, No. 4, pp. 1–14.

Chapter 2
2.22
Cassidy, M.J., Eatock Taylor, R. & Houlsby, G.T. (2001). Analysis of jack-up units using a Constrained NewWave methodology. Applied Ocean Research, Vol. 23, pp. 221-234.
Cassidy, M.J., Houlsby, G.T., Hoyle, M. & Marcom, M. (2002b). Determining appropriate stiffness levels for spudcan foundations using jack-up case records. Proc. 21st International Conference on Offshore Mechanics and Arctic Engineering (OMAE), Oslo, Norway, OMAE2002-28085.
Cassidy, M.J., Martin, C.M. & Houlsby, G.T. (2004). Development and application of force resultant models describing jack-up foundation behaviour. Marine Structures, Vol. 17, pp. 165-193.
Cheong, J. (2002). Physical testing of jack-up footings on sand subjected to torsion. Honours thesis, Centre for Offshore Foundation Systems, University of Western Australia.
Dean, E.T.R., Hsu, Y., Schofield, A.N., Murff, J.D. & Wong, P.C. (1995).Centrifuge modelling of 3-leg jackups with non-skirted and skirted spudcans on partially drained sand. Offshore Technology Conference (OTC), Houston, Texas, OTC 7839.
Dean, E.T.R., James, R.G., Schofield, A.N. & Tsukamoto, Y. (1996). Drum centrifuge study of three-leg jackup models on clay. CEUD/D-Soils/TR289.
Dean, E.T.R., James, R.G., Schofield, A.N. & Tsukamoto, Y. (1998). Drum centrifuge study of three-leg jack-up models on clay. Géotechnique, Vol. 48, No. 6, pp. 761-785.
Doherty, J.P. & Deeks, A.J. (2003). Elastic response of circular footings embedded in a non-homogeneous half-space. Géotechnique, Vol. 53, No. 8, pp. 703-714.
Gottardi, G., Houlsby, G.T. & Butterfield, R. (1999). Plastic response of circular footings on sand under general planar loading. Géotechnique, Vol. 49, No. 4, pp. 453-469.
Hansen, J.B. (1970). A revised and extended formula for bearing capacity. Bulletin No. 28, pp. 5-11, Danish Geotechnical Institute, Copenhagen.
Houlsby, G.T. (2003). Modelling of shallow foundations for offshore structures. International Conference on Foundations, Dundee, Scotland.
Houlsby, G.T. & Cassidy, M.J. (2002). A plasticity model for the behaviour of footings on sand under combined loading. Géotechnique, Vol. 52, No. 2, pp. 117-129.
Howarth, M., Dier, A., Jones, W. & Hunt, R.J. (2004). Jack-up response to wave-in-deck loads during extreme storms. Marine Structures, Vol. 17, pp. 275-290.
HSE (Health and Safety Executive) (2001). Interpretation of full-scale monitoring data from a jack-up rig. Offshore Technology Report 2001/035.
Hsu, Y.S. (1998). Excess pore pressure under cyclically loaded model jack-up foundations. PhD thesis, Cambridge University.
Karunakaran, D.N., Leira, B.J. & Spidsøe, N. (1992). Effect of nonlinear behaviour on long term extreme response of a dynamically sensitive jack-up platform. In Recent Developments in Jack-Up Platforms (Eds. Boswell, L.F. & D'Mello, C.), pp. 201-227.
Martin, C.M. (1994). Physical and numerical modelling of offshore foundations under combined loads. DPhil. thesis, University of Oxford.
Martin, C.M. & Houlsby, G.T. (1999). Jackup units on clay: Structural analysis with realistic modelling of spudcan behaviour. Offshore Technology Conference (OTC), Houston, Texas, OTC 10996.
Martin, C.M. & Houlsby, G.T. (2000). Combined loading of spudcan foundations on clay: Laboratory tests. Géotechnique, Vol. 50, No. 4, pp. 325-338.

Background
2.23
Martin, C.M. & Houlsby, G.T. (2001). Combined loading of spudcan foundations on clay: Numerical modelling. Géotechnique, Vol. 51, No. 8, pp. 687-699.
Meyerhof, G.G. (1953). The bearing capacity of foundations under eccentric and inclined loads. International Conference on Soil Mechanics and Foundation Engineering (ICSMFE), Zürich, pp. 440-445.
Morandi, A., Karunakaran, D., Dixon, A. & Baerheim, M. (1998). Comparison of full-scale measurements and time-domain irregular sea analysis for a large deepwater jack-up. Offshore Technology Conference (OTC), Houston, Texas, OTC 8828.
Murff, J.D., Hamilton, J.M., Dean, E.T.R., James, R.G., Kusakabe, O. & Schofield, A.N. (1991). Centrifuge testing of foundation behaviour using full jack-up rig models. Offshore Technology Conference (OTC), Houston, Texas, OTC 6516.
Murff, J.D., Prins, M.D., Dean, E.T.R., James, R.G. & Schofield, A.N. (1992). Jackup rig foundation modelling. Offshore Technology Conference (OTC), Houston, Texas, OTC 6807.
Nataraja, R., Hoyle, M.J.R., Nelson, K. & Smith, N.P. (2004). Calibration of seabed fixity and system damping from GSF Magellan full-scale measurements. Marine Structures, Vol. 17, pp. 245-260.
Nelson, K., Stonor, R.W.P. & Versavel, T. (2001). Measurements of seabed fixity and dynamic behaviour of the Sants Fe Magellan jack-up. Marine Structures, Vol. 14, pp. 541-483.
Ngo Tran, C.L. (1996). The analysis of offshore foundations subjected to combined loading. DPhil. thesis, University of Oxford.
Roscoe, K.H. & Schofield, A.N. (1956). The stability of short pier foundations in sand. British Welding Journal, pp. 343-354.
Schotman, G.J.M. (1989). The effects of displacements on the stability of jackup spudcan foundations. Offshore Technology Conference (OTC), Houston, Texas, OTC 6026.
SNAME (Society of Naval Architects and Marine Engineers) (1994). Site specific assessment of mobile jack-up units. SNAME Technical and Research Bulletin 5-5A, 1st Ed.
SNAME (Society of Naval Architects and Marine Engineers) (1997). Site specific assessment of mobile jack-up units. SNAME Technical and Research Bulletin 5-5A, 1st Ed., 1st Revision.
SNAME (Society of Naval Architects and Marine Engineers) (2002). Site specific assessment of mobile jack-up units. SNAME Technical and Research Bulletin 5-5A, 1st Ed., 2nd Revision.
Stock, D.J., Lewis, D.R., Baucke, T.C. & Hsu, H.Y. (2000). Hurricane Georges hindcast assessment of LeTourneau 116-C and 82-SD-C jackups. Offshore Technology Conference (OTC), Houston, Texas, OTC 12075.
Terzaghi, K. (1943). Theoretical soil mechanics. John Wiley & Sons, New York.
Thompson, R.S.G. (1996). Development of non-linear numerical models appropriate for the analysis of jackup units. DPhil. thesis, University of Oxford.
Tromans, P.S., Anaturk, A.R. & Hagemeijer, P. (1991). A new model for the kinematics of large ocean waves - applications as a design wave. Proc. 1st International Offshore and Polar Engineering Conference, Edinburgh, UK, pp. 64-71.
Tsukamoto, Y. (1994). Drum centrifuge tests of three-leg jack-ups on sand. PhD thesis, Cambridge University.

Chapter 2
2.24
Vesic, A.S. (1973). Analysis of ultimate loads of shallow foundations. Journal of the Soil Mechanics and Foundations Division, pp. 45-73.
Vesic, A.S. (1975). Bearing capacity of shallow foundations. In Foundation Engineering Handbook (Eds. Winterkorn, H. F. & Fang, H. Y.), Van Nostrand, New York, pp. 121-147.
Vlahos, G. (2004). Physical and numerical modelling of a three-legged jack-up structure on clay soil. PhD thesis, University of Western Australia.
Williams, M.S., Thompson, R.S.G. & Houlsby, G.T. (1998). Non-linear dynamic analysis of offshore jack-up units. Computers and Structures, Vol. 69, pp. 171-180.

CHAPTER 3
3.1
INVESTIGATING SIX-DEGREE-OF-FREEDOM LOADING OF SHALLOW FOUNDATIONS ON SAND
ABSTRACT
Laboratory studies of the response of shallow foundations have previously considered
only planar loading. This paper describes experimental work carried out using a loading
device that applies general loading onto model shallow foundations. The loading,
involving all six degrees-of-freedom [vertical (V ), horizontal ( 2H , 3H ), torsion (Q )
and overturning moment ( 2M , 3M )], has been applied to a 150 mm diameter circular
flat rough foundation on a loose dry silica sand. Aspects of the loading rig design are
briefly described, but the main focus is the presentation of the experimental results.
These provide evidence for the generalisation of existing work-hardening plasticity
models from planar loading to general loading conditions. This evidence is used to
extend an existing numerical model to the six degree-of-freedom case, and the
simulation results are compared to the experimental results.

Chapter 3
3.2
3.1 INTRODUCTION
Understanding the response of circular shallow foundations to general loading is an
important branch of geotechnical engineering. In particular, when considering the
design of the foundations for offshore structures it is important to understand the load-
displacement response (that is, the stiffness) as well as the ultimate capacity. This is the
case for the two offshore structures shown in Figure 3.1. The first is a concept for an
offshore wind turbine, and the second represents a mobile jack-up drilling unit. The
severe loading conditions found offshore often lead to large vertical (V ), horizontal
( H ) and moment ( M ) loads being applied to the foundations, with typical resultant
loads for the two applications shown in the figure. There are clearly differences in the
magnitudes of loads applied to the structures, and the foundations must be designed to
carry these loads safely. A typical assumption is that the loads applied to the structure
are in-plane. However, for both of the applications shown this is clearly a simplification
of the actual conditions. For instance, in the case of the wind turbine the wind and wave
directions may not be collinear. Therefore the loads applied to the foundation cannot be
represented as planar. Similarly, for the mobile drilling unit the environmental forces on
the structure might apply torsions to the foundations as well as moment and horizontal
loads that are not co-planar. Therefore, to correctly predict the response and capacity of
these structures it is necessary to understand the effect that three-dimensional loading
conditions might have on the foundation response.

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.3
200MN
25MN
6MN
4MN
100m
30m
90m
Figure 3.1. Two different structures where three-dimensional effects must be accounted for.
Earlier studies such as those by Meyerhof (1953), Hansen (1961, 1970) and Vesic
(1973, 1975) considered ultimate capacity of shallow foundations under the applied in-
plane loads. Foundation shape and load eccentricity were accounted for with empirical
parameters. However, this approach is not appropriate for prediction of foundation
stiffness and incorporation into numerical analysis packages. More recent studies
(Gottardi et al. 1999; Martin & Houlsby 2000, 2001; Byrne & Houlsby 2001; Cassidy et
al. 2002; Houlsby & Cassidy 2002) have developed an alternative framework based on
the theory of strain-hardening plasticity. In these studies the theoretical development has
been linked with experimental work to calibrate the models. The theories provide a very
satisfactory simulation of the load-displacement behaviour of shallow foundations, and
are now being applied to other soil-structure interaction problems (such as pipelines).
For combined loading on circular foundations the theory has four components
(a) a yield surface determining the interaction between the relevant loads
( )HRMV ,2/, ,
(b) a description of the elastic behaviour of the footing for load states within the
yield surface,

Chapter 3
3.4
(c) a hardening law that defines how the yield surface expands or contracts, and
(d) a plastic potential that describes the incremental plastic displacements at yield.
These components have been established for three degree-of-freedom loading of
shallow foundations on clay (Martin & Houlsby 2000, 2001), dense sand (Gottardi et al.
1999; Houlsby & Cassidy 2002) and loose carbonate sand (Byrne & Houlsby 2001;
Cassidy et al. 2002). The loads in the model are defined in Figure 3.2a, where the
moment is converted to units of force by dividing through by R2 , and the rotations are
converted to units of displacement by multiplying by R2 .
u
wθ
Reference position
Current positionM
V
H
2R
V
2R
1
3
2
Q
M3M2
H3
H2
a) b)
Figure 3.2. Notations and conventions for a foundation under: a) three degree-of-freedom
loading, b) six degree-of-freedom loading (after Butterfield et al. 1997).
The yield surface for the planar loading problem is elliptical in the HRM :2/ plane
and parabolic in the HV : and RMV 2/: planes. Experimental work shows that the
ratio of the horizontal to rotational loading influences the combined load capacity of the
footing in the HRM :2/ plane (Gottardi & Butterfield 1993). Therefore the ellipse in
this plane is rotated with respect to the load axes. This rotation is achieved by using a
cross-coupling term and an eccentricity parameter a . The yield surface is given by

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.5
( ) 012 21 2212
00
2
0
2
0
=−−−⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛= βββ vv
mm
hha
mm
hhf (3.1)
where 0/VHh = , 0/)2/( VRMm = , 0/VVv = , 0h is the normalised horizontal load
capacity, 0m is the normalised moment capacity, a is the eccentricity of the ellipse in
the mh : plane, ( )( ) 2
21
2112 21
21
⎥⎦
⎤⎢⎣
⎡ +=
+
ββ
ββ
βββββ and 1β and 2β are shaping parameters for the
yield surface in the vertical load plane (Nova & Montrasio 1991). Studies have
identified the parameter values for the yield surface for a variety of footing types and
for different soils: for example, see Gottardi et al. (1999) for shallow circular
foundations on dense sand, Martin & Houlsby (2000) for spudcans on clay, or Byrne &
Houlsby (2001) for circular foundations on contracting carbonate sand.
A natural extension of these theories is to six degrees-of-freedom, and Martin (1994)
proposed an expression for this case as follows.
2
000
3223
2
0
3
2
0
2
2
0
3
2
0
2 2 ⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
mhmhmha
mm
mm
hh
hhf
( ) 01 21 2212 =−− βββ vv (3.2)
where 022 /VHh = , 033 /VHh = , 022 /)2/( VRMm = , 033 /)2/( VRMm = and
0/)2/( VRQq = . The loading directions are defined in Figure 3.2b and follow
Butterfield et al. (1997). The small displacements work-conjugate to the loads
(V , 2H , 3H , RQ 2/ , RM 2/2 , RM 2/3 ) are ( w , 2u , 3u , ωR2 , 22 θR , 32 θR ). When
extending the yield surface formulation from three to six degrees-of-freedom it can be
deduced from symmetry that there are no cross-coupling terms involving 32HH ,
32MM , 22MH , 33MH or any coupling terms including torsion Q (Martin 1994;

Chapter 3
3.6
Cassidy & Bienen 2002). There has, however, been no systematic study of footing
response to full six degree-of-freedom loading to verify the extension of the planar
loading theories to the general case. This paper describes the development of a loading
rig and the results of experimental work to verify Equation 3.2, and then the
development of a full-plasticity numerical model based on the experimental results.
3.2 EQUIPMENT
Typically, in robotics applications, the Stewart platform (Stewart 1965) is considered to
be the most elegant approach for achieving general motion of a platform. The device
described in this paper is a variant of the Stewart platform (Stewart 1965; Byrne &
Houlsby 2005), and similar arrangements are used, for instance, in the automobile
industry for dynamic testing of vehicles.
3.2.1 The testing rig
The system uses six actuators which, at one end, are connected to the loading platform,
and at the other are connected to a stiff reaction frame. Provided that six properly
arranged actuators are used, pinned at both ends, then it is possible to achieve six
degree-of-freedom motion of the platform by changing the lengths of the actuators in a
coordinated fashion. By careful selection of the actuator geometry, it is possible to
ensure that the control problem is well conditioned, so that calculations proceed in a
straightforward fashion.
The disadvantage of the Stewart platform is that the simple motions are not linearly or
independently related to the motion of any individual actuator, unlike the planar loading
system designed by Martin (1994). Quite complex control routines are required to
ensure that all actuators move in concert to achieve the desired motion. Figure 3.3

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.7
shows the loading rig as constructed, showing three actuators approximately vertical
and three actuators approximately horizontal. This arrangement ensures that the
problem is well conditioned, as the main motions can be directly related to the motions
of a subset of the actuators. For example, to achieve vertical movement the three
vertical actuators must move the same distance, whereas only a slight adjustment of the
horizontal actuators is required.
c)
Independent measurement frame
Load reaction frame
System of six loading actuators
System of six LVDTs (20 mm)
Footing
b)
a)
Figure 3.3. Loading apparatus, showing: a) general arrangement, b) close-up of footing and LVDT
arrangement and c) detail of six degree-of-freedom load cell.
The actuators, supplied by Ultra Motion, are linear actuators each powered by an
Animatics SmartMotor. This is a brushless DC servo-motor incorporating an integrated
control system comprising a motion controller, encoder and amplifier. The actuators
have a maximum extension of 200 mm and can move at rates of up to 5 mm/s.

Chapter 3
3.8
Commands to individual actuators can specify relative motions, position, velocity or
acceleration, and they can be executed simultaneously. A number of sequential moves
can be downloaded to on-board memory on the actuators, and then executed according
to a synchronised clock system. This makes it possible to execute complicated platform
motions provided one can determine, in advance, a time history of the individual
actuator motions required.
3.2.2 The control program
A program has been written in Visual Basic to control the system. The program allows
input of a sequence of moves in terms of the motions ( w , 2u , 3u , ωR2 , 22 θR , 32 θR ) of
the platform, known as the pose. These motions can be described in terms of a rotation
and translation matrix (that is, a transformation matrix). By using the transformation
matrix, applied to the coordinates of the platform, it is possible to determine the
required lengths of each actuator for a particular move. To move the platform to the new
position simply requires extending/retracting each actuator to its required length. This
calculation procedure is known as the inverse kinematics problem and is a simple
analytical calculation.
The reverse calculation, called the forward kinematics problem, is not so
straightforward, and requires an iterative solution. If the lengths of each actuator are
known, then it is possible to calculate the new pose of the platform. Within the actuators
are linear potentiometers that allow measurement of the current length of each actuator,
and therefore can be used to determine the pose of the platform. Both inverse and
forward kinematics procedures are performed within the software.

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.9
A typical test proceeds by determining the initial platform pose using the forward
procedure. The user then specifies a sequence of moves. These moves are broken into
increments so that the non-linearity of motion of each actuator can be captured. The
inverse procedure is used to calculate for each of the moves the required length of each
actuator. A file of actuator lengths with time (position-time data) is recorded. The
relevant data from this file are sent to each actuator, and each movement is executed
simultaneously. While the moves are being performed the control program logs the data.
In particular, the actuator lengths are recorded and the platform pose is calculated and
displayed. Currently the loading device can execute displacement-controlled motions
and only relatively simple load control sub-tests. The tests described in this paper are all
displacement controlled.
3.2.3 Load cell
The load cell measures the six components of load on the foundation, which for these
tests was a rough flat circular footing 150 mm in diameter. The load cell is a thin walled
cylinder, fabricated from aluminium alloy, of radius r = 27.5 mm, wall thickness
t = 0.475 mm and length 70 mm. The thin-walled section was machined from a larger
block, leaving heavy end flanges with an appropriate transition from cylinder to flanges
to minimise stress concentrations. A total of 32 strain gauges are fixed to the outer
surface of the cylinder to measure appropriate strains. Figure 3.3c shows the completed
cell. The strain gauges were arranged in six Wheatstone bridge circuits, each
corresponding to the measurement of a particular load component. Each circuit was
fully compensated for temperature. Eight gauges were used for the vertical and torque
circuits, and four gauges for each of the moment and horizontal load circuits. The cell
was calibrated by applying known loads and measuring the output from all six circuits.

Chapter 3
3.10
By varying the loads one at a time, it is possible to determine components of the matrix
X relating loads to voltages in the equation XFC = , where C is the circuit output
vector and F is the load vector. Inverting X produces a six-by-six calibration matrix,
so that loads are calculated during the experiment. As the loads are calculated they need
to be transformed from the local coordinate system (that is, the rotated system) back to
the global system so that they are in accordance with the convention shown in
Figure 3.2b.
3.2.4 Small LVDT system
One determination of the platform pose is achieved by using the linear potentiometers
within the actuators. This, however, provides only a coarse measurement of the platform
pose. In particular, the rig stiffness affects the accuracy of this measurement. To achieve
more accurate displacements a system of small linear variable displacement transducers
(LVDTs) (20 mm range) is used. These are placed in a similar configuration to that of
the actuators, but supported on a separate frame, as shown in Figure 3.3a. The forward
kinematics calculation is used to determine the pose of the platform, given the lengths
of the LVDTs. This allows very fine resolution of the foundation movement, to the
order of a few microns.
3.2.5 Soil characteristics
The experiments were carried out on dry yellow Leighton Buzzard 14/25 silica sand.
The characteristics are summarised in Table 3.1, and further information can be found
in Schnaid (1990). The sand was carefully placed into the tank to achieve a very loose
state. The average density of all tests was 14.80 kN/m3, which corresponds to a relative

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.11
density rD of 5%. An overview of all the tests completed, including details of the soil
density for each test, can be found in Bienen et al. (2005).
Particle sizes 10D , 30D , 50D , 60D [mm] 0.63, 0.70, 0.80, 0.85
Specific gravity, sG 2.65
Coefficient of uniformity, uC 1.3
Minimum dry density, minγ [kN/m3] 14.65
Maximum dry density, maxγ [kN/m3] 17.58
Critical state friction angle, cv'φ [degrees] 34.3
Table 3.1. Soil characteristics: yellow Leighton Buzzard sand.
3.3 EXPERIMENTAL WORK
The experimental programme was designed to allow verification of the theory for six
degree-of-freedom loading. Specifically, the testing concentrated on ‘swipe’ testing
(Tan 1990; Martin 1994; Gottardi et al. 1999; Byrne 2000; Martin & Houlsby 2000),
including in-plane swipe tests, torsion swipe tests and out-of-plane loading
combinations, as these have not been tested before. The swipe tests can be used to
determine the shape of the yield surface. Other experiments, such as vertical loading
tests and radial displacement tests, were performed to investigate the elastic response,
the hardening behaviour and the flow rule. A summary of the different tests is given in
Table 3.2. More details of the experiments and all of the data are found in Bienen et al.
(2005).

Chapter 3
3.12
Test No. Test Numbers
Vertical loading 4 BB01, BB02, BB35, BB36
H swipe 16 BB03, BB08, BB09, BB15, BB16
M swipe 4 BB04, BB10, BB14
Q swipe 10 BB11, BB17, BB32, BB33, BB35
Combined HM swipe: in-plane 11 BB06, BB07, BB18, BB36, BB37, BB38, BB39
Combined HM swipe: out-of-plane 1 BB05
Combined HQ swipe 4 BB17
Consecutive H swipes 9 BB12, BB13, BB19, BB33
Consecutive M swipes 6 BB14, BB20
Consecutive H →Q (Q→H ) swipes 7 BB21, BB25, BB26, BB27, BB29
Consecutive M →Q (Q→M ) swipes 5 BB23, BB24, BB27, BB28
Consective H →M ( M →H ) swipes: in plane
4 BB22, BB30, BB31
Consecutive H →M ( M →H ) swipes: out of plane
7 BB21, BB22, BB23, BB24, BB26, BB30, BB32
Radial displacement, dwd /ω 10 BB20, BB22, BB26, BB28, BB29, BB30, BB31, BB33,
BB34, BB35
Radial displacement, dwdu / 6 BB21, BB24, BB27, BB32, BB33, BB37
Radial displacement, dwd /θ 3 BB23, BB25, BB38
Combined radial displacement 2 BB36, BB39
Elasticity tests 4 BB34
Total 113
Table 3.2. Test programme.
3.3.1 Yield surface
A swipe is performed by vertically loading the footing to a prescribed value, after which
the footing is translated or rotated whilst the vertical displacement is kept constant. The
measured loads provide direct information on the shape of the yield surface for that load
path. If several of these tests are carried out at different deviatoric load combinations

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.13
then it is possible to fit a surface to the data, such as the one given by Equation 3.1 for
three degrees-of-freedom. This strategy has been successfully used for the three degree-
of-freedom footing models. The same strategy can be employed for the six degree-of-
freedom expression (Equation 3.2), although the number of tests becomes many times
greater. In six degrees-of-freedom the swipes include both planar loadings and out-of-
plane loadings. In order to reduce the number of tests to a feasible number, careful
planning of tests is required (see Table 3.2).
A typical series of swipe tests for horizontal translations is shown in Figure 3.4. The
experiments were carried out by moving the footing to a predetermined vertical
displacement, locking at that displacement, and then translating the footing horizontally.
Once the test is completed the footing is translated back to its original position before
being penetrated further into the sand where a further test can be carried out. Provided
that sufficient vertical penetration occurs, so that the virgin penetration line is rejoined,
it is assumed that the previous test history will be erased and that the footing is
penetrating through virgin soil. This allows several tests to be completed on any one
sample. This strategy was employed successfully by Martin (1994) and Byrne (2000)
for footings on clay and dense sand respectively. Figure 3.4a shows the family of curves
in load space, noting that although all loads are measured by the load cell only the
relevant load paths are shown. This shows that the yield surface increases in size with
an increase in the initial vertical load applied to the foundation, consistent with previous
studies. Note that in this test the first, third and fifth swipes were along the direction of
axis 2 (as defined in Figure 3.2b) so that the relevant load path is 2: HV , whereas the
second and fourth swipe are along the direction of axis 3 so that the relevant load path is
3: HV . There does not appear to be any difference due to the loading direction. This is

Chapter 3
3.14
confirmed by normalising the curves by the largest vertical load experienced prior to the
swipe, 0V . The shape and size of the normalised curves given in Figure 3.4b are similar.
The load-displacement curves associated with this family of tests are plotted in
Figure 3.4c. The peak horizontal load is mobilised fairly quickly after the translation
commences. Figure 3.4d shows that the normalised curves are also similar in load-
displacement space.
0.0
20.0
40.0
60.0
80.0
100.0
120.0
0.0 200.0 400.0 600.0 800.0 1000.0
V [N]
H2,
H3 [
N]
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H2/V
0, H
3/V0 [
-]
0.0
20.0
40.0
60.0
80.0
100.0
120.0
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0u2, u3 [mm]
H2,
H3 [
N]
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.000 0.002 0.004 0.006 0.008 0.010 0.012 0.014u2/2R, u3/2R [-]
H2/V
0, H
3/V0 [
-]
Figure 3.4. Typical swipe experiment: a) family of horizontal swipe curves (BB16), b) family of
horizontal swipes normalised by V0, c) family of horizontal load-displacement curves,
and d) normalised family of horizontal load-displacement curves.
Similar responses are evident for tests where rotations are applied to the foundation at
constant vertical displacement. Figure 3.5a compares the results from a horizontal
swipe, a rotational swipe and a torsional swipe test.

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.15
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
V/V0 [-]
H2/V
0, H
3/V0,
Q/2
RV 0
,M
2/2R
V 0, M
3/2R
V 0 [-
]
h
m
q
0.00
0.20
0.40
0.60
0.80
1.00
1.20
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
X/V 0
[-]
h
mq
Figure 3.5. Three different swipe tests: a) normalised by V0, b) in the plane X/V0.
The plot shows that the yield surface size differs for each of the loading modes, and the
shape varies slightly as well. The swipes in the horizontal plane show a larger yield
surface than those in the rotational plane. The yield surface mapped out by torsional
swipes is smaller still. Although the size of the yield surface in the respective planes
differs, the three tests shown trace similar paths when normalised by the maximum pure
load capacity in the respective direction. This is illustrated in Figure 3.5b where the
loads other than vertical are collapsed into a normalised deviator force
0VXx = (3.3)
where the deviator force is given by
2
000
3223
2
0
3
2
0
2
2
0
3
2
0
2 2/2/2/22/2/⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
qRQ
mhRMHRMHa
mRM
mRM
hH
hHX .
(3.4)
It is clear that the shapes for the different modes of loading are slightly different. We,
however, assume that the shapes are the same, so as to simplify the fitting of
Equation 3.2 to the data. We also make the simplifying assumption that the values of the
parameters 0h , 0m and 0q remain constant with footing penetration, although Byrne &

Chapter 3
3.16
Houlsby (2001) suggest that 0h is a function of footing embedment. Further swipes
were carried out that use a combination of translation and rotation either in-plane or out-
of-plane. The results of all 46 pure swipe tests are collated in Figure 3.6 using
Equation 3.4. This figure also shows the best-fit parabolic yield surface. The yield
surface parameters, obtained by carrying out a least-squares regression of the data onto
Equation 3.2, are given by
0h = 0.122, 0m = 0.075, 0q = 0.033
a = -0.112, 1β = 0.76, 2β = 0.76
The yield surface parameters determined for the loose silica sand here agree well with
previous studies on different densities and even different sands (Cassidy 1999; Gottardi
et al. 1999; Byrne & Houlsby 2001). Of course, these previous studies involved loading
that is a subset of the loading patterns applied here.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
V/V0 [-]
X/V 0
[-]
best fit yield surface
Figure 3.6. All swipe tests in deviator plane with best-fit yield surface.
A special set of swipe tests were carried out that involve changing the direction of the
swipe during the test. For instance, Figure 3.7 shows the load data from a test where

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.17
initially the footing was horizontally translated 0.25 mm along axis 2 before being
translated 1.75 mm along axis 3. Correspondingly, 2H increases and tracks around a
yield surface. On changing the direction, 2H drops whilst 3H picks up and continues
the track around the yield surface.
-0.02
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
V/V0 [-]
H2/V
0, H
3/V0 [
-]
h2
h32
3
Figure 3.7. Load paths traced by the footing under combination of consecutive perpendicular
horizontal translations.
For comparison the figure shows the yield surface for horizontal loads as defined by the
parameter 0h above. Also shown in the figure is a line that represents the point at which
the direction changes. Note that in the experiment the loading rig is not infinitely stiff,
and therefore after the change in direction there is still some movement along the axis 2
direction although the main translation is along axis 3. This results in a slower reduction
in 2H than would be predicted by the numerical model. Several different combinations
of these tests (38 in total) are listed in Table 3.2 and include tests where a translation is
followed by a rotation and vice versa.

Chapter 3
3.18
3.3.2 Hardening law
Figure 3.8a shows the typical vertical load-displacement responses measured in the
tests. Two tests were devoted solely to vertical loading, and the initial vertical loading
curves from the swipe tests provided extra data. The small amount of scatter between
the curves illustrates the repeatability of the tests and the uniformity in soil sample
preparation. Also shown in Figure 3.8a is the hardening law expression fitted to the
vertical load-displacement curves. The expression has the form
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+=
2
110
1
1
ww
ww
wkVp
p
p (3.5)
where pw is the plastic component of the vertical displacement (Cassidy et al. 2002).
0.0
100.0
200.0
300.0
400.0
500.0
600.0
700.0
800.0
900.0
1000.0
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0w [mm]
V [N
]
Vertical load-displacement tests
Hardening law
0.0
100.0
200.0
300.0
400.0
500.0
600.0
700.0
0.0 5.0 10.0 15.0 20.0 25.0zp [mm]
V 0 [N
]
du2/dw = 0.5, 2Rdω/dw = 1.05
2Rdω/dw = 0.652Rdβ/dw = 0.52
2Rdω/dw = 0.26
2Rdω/dw = 1.31du2/dw = 1.0 HL
Figure 3.8. Hardening relationship: a) compared with the vertical load-displacement results, b)
compared with radial displacement results.
Note that Figure 3.8a is presented in terms of the total vertical displacement, which
consists of the plastic displacement (as described in Equation 3.5) and an elastic
displacement (described in the next section). The parameters achieving the best fit for
Equation 3.5 are
1k = 51.25 N/mm, 1w = 20.5 mm, 2w = 8 mm

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.19
However, in a similar way to the results reported by Byrne & Houlsby (2001),
hardening as a function of the plastic vertical displacement did not capture the measured
response completely. Analysis of the radial displacement experimental data showed that
the pure vertical load capacity 0V calculated by fitting the yield surface expression using
the measured loads gives significantly higher values than predicted by the hardening
law (that is, the yield surface is larger than predicted by the current vertical plastic
penetration level). This implies that the hardening must be a function of the radial
plastic movements (translations and rotations) as well as the vertical movements.
Equation 3.5 can be rewritten to incorporate radial hardening such that 0V is a function
of the total plastic displacement, as follows.
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+=
2
110
1
1
wz
wz
zkVp
p
p (3.6)
The total plastic displacement can be obtained by summation of the incremental plastic
displacement, given by
ppppppp RcRRcuucwz ωθθ &&&&&&& 2)2()2( 32
32
2223
221 +++++= (3.7)
which now comprises all the plastic displacement components. The values for 1k , 1w
and 2w remain as before, because they achieved the best fit for purely vertical
displacement. In order to establish the new parameters for the model with radial
hardening, both the hardening law and the yield surface parameters need to be adjusted
until the results become consistent. The yield surface parameters presented previously
represent the best-fit values for the model that includes radial hardening. The additional
radial hardening parameters for Equation 3.7 are

Chapter 3
3.20
1c = 1.07, 2c = 0.62, 3c = 1.09
Figure 3.8b illustrates that this hardening law matches the experimental data reasonably
well. The best-fit values for the radial components of the hardening law are slightly
larger than the values suggested by Byrne & Houlsby (2001) for the horizontal and
rotational components of hardening on a loose carbonate sand. Further work is required
to understand the relationship between the nature and state of the soil and this
component of the model.
3.3.3 Elasticity
To establish parameters to describe the elastic behaviour of the foundations several
vertical unload-reload loops were performed during the vertical load displacement tests.
This allows an assessment of the vertical elastic stiffness vK , and analysis of the data
gives vK = 5.5 kN/mm. The elastic stiffness for the other degrees-of-freedom can be
derived from this vertical stiffness by considering the elastic stiffness matrix for circular
footings, as follows.
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
3
2
3
2
3
2
3
2
222
00000000000000000
000000000
2
2/2/
2/
θθω
RRdRddududw
kkkk
kkk
kkk
GR
RdMRdM
RdQdHdHdV
mc
mc
q
ch
ch
v
(3.8)
The stiffness coefficients can be established by finite element analysis, such as those
derived by Doherty & Deeks (2003) as vk = 2.904, hk = 2.901, mk = 0.548, ck = -0.208
and qk = 0.918. Knowing the vertical elastic stiffness, the shear modulus can be derived

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.21
(in these tests ≈G 12.7 MN/m2), and the entire elastic stiffness matrix can be
established.
3.3.4 Flow rule
To assess the flow behaviour and therefore define the plastic potential requires tests that
expand the yield surface in a predefined manner. In a radial displacement test the
footing is moved into the soil at a fixed displacement ratio while the corresponding
loads are measured. The footing is continually at yield. The combined load point must
lie on the current yield surface, and the displacement ratio at that point enables the
direction of plastic displacement at yield to be identified. Various radial displacement
tests have been carried out to provide information about the flow rule, particularly in the
torsional plane, where very limited experimental data are available.
The analysis of the data is carried out by considering the plastic deviatoric displacement
direction evaluated from the measured displacement data. For the three degree-of-
freedom case Cassidy (1999) expressed the incremental plastic displacements at yield in
the radial direction (that is, the displacement that is work conjugate to the load X
defined in Equation 3.4) as
20
,2V
XXfd experimentp λλξ =
∂∂
= (3.9)
where λ is a multiplier defining the magnitude of plastic displacement. This is derived
from the continuity condition, which ensures that during yield the load point lies on the
current yield surface and therefore holds for the true loading case. To allow
comparisons of plastic displacements numerically predicted from measured loads and
those actually followed in the experiments, Equation 3.9 can be rewritten for the six
degree-of-freedom case as

Chapter 3
3.22
})]2([)]2([)(){(1
1 230
220
230
2202
2, ppppexperimentp RdmRdmduhduh
ad θθξ +++
−=
[ ] 22032232
00 )2()2()2(12
ppppp RdqRdduRdduamah ωθθ +−
−+ (3.10)
If associated flow is assumed for the VX : plane it is possible to obtain a theoretical
prediction of displacements by differentiation of the yield surface function
(Equation 3.9). The experimentally observed incremental plastic displacements
( pp dwd :ξ ) were found, however, to require non-associated flow in this plane. The
evidence for this is shown in Figure 3.9 where the radial displacement test data have
been plotted in terms of ( )VX /tan 1− against )/(tan 1pp dwdξ− . For comparison the
figure shows predictions for associated flow and for various degrees of non-association
using the flow rule given by
( )2
'00
2
2
'00
3
2
'00
23232
2/2/,2/,2/,,, ⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
VmRM
VhH
VhHRMRMRQHHVg
mhh ααα
2
'00
2'000
3223
2
'00
3 2/2/2/22/⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
VqRQ
VmhRMHRMHa
VmRM
qmhm αααα
( )( )
0143
43
432
'0
2
'0
2
43
43 =⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡ +−
+ ββ
ββ
ββ
ββββ
VV
VV
(3.11)
where the parameter '0V represents the maximum pure vertical load for the plastic
potential such that it intersects the yield surface at the point of the current load state. 3β
and 4β represent shaping parameters, and hα , mα and qα are association factors as
described by Cassidy (1999), Cassidy et al. (2002), Houlsby & Cassidy (2002) and
Cassidy & Cheong (2005). In order to simplify the analysis of the data the curvature
parameters 3β and 4β are assumed to be equal. The association parameters hα and mα

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.23
are taken to be equal, because the number of tests carried out does not allow any
distinction to be deduced with confidence. However, it is necessary to use a higher
value for qα because the degree of non-association is much higher for this direction.
0
10
20
30
40
50
60
70
80
90
0 5 10 15 20 25 30
tan-1(dξp/dwp) [°]
tan-
1(X/
V) [°
]
2Rdomega/dw = 0.262Rdomega/dw = 0.652Romega/dw = 1.312Rdtheta2/dw = 0.52du2/dw = 0.5 & 2Rdomega/dw = 1.05du2/dw = 1.0associated flowalpha_h = alpha_m = alpha_q = 3.7alpha_h = alpha_m = 3.3alpha_q = 5.0
β3 = β4 = 0.52 2Rdω/dw = 0.262Rdω/dw = 0.652Rdω/dw = 1.312Rdθ2/dw = 0.52du2/dw = 0.5 & 2Rdω/dw = 1.05du2/dw = 1.0Associated flowαh = αm = αq = 3.7αh = αm = 3.3αq = 5.0
Figure 3.9. Radial displacement tests and predictions for various degrees of non-association.
The summary best-fit parameters are
3β = 4β = 0.52, hα = mα = 3.3, qα = 5.0
Curves representing this combination of parameters are shown in Figure 3.9; note that
these parameters are used in the numerical predictions shown in the sections that follow.
If, however, it is necessary to make all the association parameters equal, the best-fit
parameters are
3β = 4β = 0.52, hα = mα = qα = 3.7
In the radial displacement tests the ratio of the applied displacements is held constant.
Therefore a large number of experiments are required to collect a range of information
on the degree of non-association in a plane. An alternative approach to obtain

Chapter 3
3.24
information about the flow behaviour is to carry out constant vertical load tests. These
are similar to swipe tests, but the vertical load is held constant rather than the vertical
displacement. It is not yet possible to carry out this type of test with the equipment
described here.
The study of flow has concentrated on planes that include vertical load and
displacement. For plastic displacements in the rotational-horizontal ( )HM : planes,
associated flow has been assumed. This is based on the experimental evidence from
three degree-of-freedom investigations such as reported by Gottardi et al. (1999),
Martin & Houlsby (2000, 2001), Byrne & Houlsby (2001), Cassidy et al. (2002) and
Houlsby & Cassidy (2002). The series of tests reported in this paper has not focused on
investigating this aspect of behaviour.
3.4 NUMERICAL PREDICTIONS
The experimental work above forms the basis for developing numerical models, such as
that reported by Houlsby & Cassidy (2002), and in particular extending them from three
to six degrees-of-freedom. Based on the work of Martin & Houlsby (2000) and Houlsby
& Cassidy (2002), a numerical footing plasticity model has been developed called ISIS.
The remainder of this paper will outline the development of this model to account for
six degrees-of-freedom and the resulting numerical predictions of the experimental
work. A summary of the parameters determined from the analysis of the experimental
work is shown in Table 3.3. One of the developments derived from the experimental
work was to incorporate, into ISIS, hardening as a function of radial displacements
rather than solely as a function of the vertical plastic penetration.

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.25
Parameter Value Model feature
0h 0.122
0m 0.075
0q 0.033
a -0.112
1β 0.76
2β 0.76
Yield surface
1k 51.25
1w 20.5
2w 8
1c 1.07
2c 0.62
3c 1.09
Hardening law
hα 3.3
mα 3.3
qα 5.0
3β 0.52
4β 0.52
Flow rule
Table 3.3. ISIS best-fit parameters.
3.4.1 Radial displacement tests
The numerical simulation of the radial displacement tests represents challenging
analyses because the yield surface expands at every increment of the test. Figure 3.10
shows the measured and numerically predicted responses for the radial test involving
vertical and torsional displacements at a ratio of dwRd /2 ω = 1.31. Note that in the
experiment the imposed displacement path relates to the total displacements, and the
imposed plastic displacement ratios may vary slightly during the test (dependent on the
loads and the elastic response of the footing).

Chapter 3
3.26
0.0
5.0
10.0
15.0
20.0
25.0
0.000 0.002 0.004 0.006 0.008 0.010 0.0122Rω [m]
Q/2
R [N
]
0.0
5.0
10.0
15.0
20.0
25.0
0.000 0.002 0.004 0.006 0.008 0.010 0.0122Rω [m]
Q/2
R [N
]
Vertical HLRadial HL
Figure 3.10. Radial displacement test BB34 (2Rdω / dw = 1.31): a) load-displacement experimental
results, b) load-displacement numerical prediction.
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
0.000 0.001 0.002 0.003 0.004 0.005u2 [m]
H2 [
N]
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
0.000 0.001 0.002 0.003 0.004 0.005u2 [m]
H2 [
N]
Vertical HLRadial HL
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
20.0
0.000 0.002 0.004 0.006 0.008 0.0102Rω [m]
Q/2
R [N
]
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
20.0
0.000 0.002 0.004 0.006 0.008 0.0102Rω [m]
Q/2
R [N
]
Vertical HLRadial HL
Figure 3.11. Radial displacement test BB39 (du2 / dw = 0.5 and 2Rdω / dw = 1.05) in: a) horizontal
load-displacement experimental results, b) horizontal load-displacement numerical
prediction, c) torsion load-displacement experimental results, and d) torsion load-
displacement numerical prediction.

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.27
The prediction includes both the radial-hardening model and the vertical-only hardening
law. It is clear that by using a radial-hardening rule a much better agreement in load
magnitude with the experimental data is predicted.
In the radial displacement test shown in Figure 3.11 a combination of three different
motions was applied to the footing. The footing was twisted and displaced horizontally
while at the same time penetrated into the soil. The prescribed displacement ratios were
dwdu /2 = 0.5 and dwRd /2 ω = 1.31. In this case the prediction using the radial-
hardening model slightly overpredicts the results in the torsional plane, whereas the
vertical hardening law underestimates the loads.
3.4.2 Swipe tests
Following the experimental procedure, a numerical swipe test proceeds by penetrating
the footing vertically into the ground and thereby establishing the load state to be at the
apex of the yield surface, with a size 0V determined by the hardening law. After
reaching the required vertical displacement, the increment of total vertical displacement
is kept constant while displacement paths in the other degrees of freedom are input, and
the corresponding six loads are calculated.
The displacements applied during the swipe phase, and the corresponding plastic
components, are relatively small. This is why additional hardening due to radial
plasticity in these tests is not significant. Therefore uncertainty in the hardening law
parameters 1c , 2c and 3c visible in the differences between experimental data and the
best-fit radial hardening law predictions shown in Figure 3.8b are not expected to
influence the quality of swipe test predictions to a significant extent.

Chapter 3
3.28
The swipe test data where a single movement (translation, rotation or combinations)
was applied to the footing were used to define the yield surface parameters. Some of the
single-movement swipe tests were predicted numerically to show accuracy of these
parameters. However, Houlsby & Cassidy (2002) and Cassidy et al. (2002) provide
several retrospective simulations of horizontal and moment swipe data, and so therefore
they are not repeated here. This previous work did not examine the torsional swipe tests,
and so we present a numerical prediction here.
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.0 0.2 0.4 0.6 0.8 1.0V/V0 [-]
Q/2
RV 0
[-]
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.0 0.2 0.4 0.6 0.8 1.0V/V0 [-]
Q/2
RV 0
[-]
0.0
5.0
10.0
15.0
20.0
25.0
0.000 0.001 0.002 0.003 0.004 0.005 0.0062Rω [m]
Q/2
R [N
]
0.0
5.0
10.0
15.0
20.0
25.0
0.000 0.001 0.002 0.003 0.004 0.005 0.0062Rω [m]
Q/2
R [N
]
Figure 3.12. Torsional swipe BB32: a) load space experimental results, b) load space numerical
prediction, c) load-displacement experimental results, and d) load-displacement
numerical prediction.
Figure 3.12 shows the measured and predicted responses in a torsional swipe test. With
the plastic potential parameters as derived from the experimental work (shown in
Figure 3.9), the predicted load-displacement response exhibits a pronounced peak,

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.29
strain-softening and a low residual torsional capacity. This has not been observed in the
experimental data, where there is virtually no softening after the peak load has been
reached. The underprediction of torsion is reflected in the load plane (compare
Figures 3.12a and b). The remarkable softening in the prediction is due principally to an
extreme sensitivity to the way flow is modelled, and this aspect of the modelling
requires further refinement. For comparison, if the flow parameters are derived so that a
best fit of the torsional swipe (from Figure 3.12) is obtained as shown in Figure 3.13a,
then it is not possible, using the current formulation, to match the radial displacement
test data such as that from Figure 3.10 accurately (shown in Figure 3.13b).
0.0
5.0
10.0
15.0
20.0
25.0
0 0.001 0.002 0.003 0.004 0.005 0.0062Rω [m]
Q/2
R [N
]
ExperimentalNumerical
0.0
5.0
10.0
15.0
20.0
25.0
0.000 0.002 0.004 0.006 0.008 0.010 0.0122Rω [m]
Q/2
R [N
]ExperimentVertical hardening lawRadial hardening law
Figure 3.13. Comparison of results using flow parameters derived to match torsional swipe test: a)
torsional swipe results (BB32, Figure 3.12), b) radial displacement results (BB34,
Figure 3.10).
3.4.3 Swipe testing with changing displacement path
An important aspect of moving from a three to a six degree-of-freedom model is the
ability to predict the response of the footing to a change in loading direction. As
described previously, several swipe tests incorporated a change in displacement
direction during the swipe, and an example response was shown in Figure 3.7. A
numerical prediction of this result is shown in Figure 3.14. The numerical test involved
preloading the footing to the target vertical displacement followed by horizontal

Chapter 3
3.30
translation, while keeping the vertical displacement constant. After a short translation
the footing was translated perpendicular to the original direction.
-0.02
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H2/V
0, H
3/V0 [
-]
H2H3
2
3
-0.02
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H2/V
0, H
3/V0 [
-]
H2H3
2
3
-20.0
0.0
20.0
40.0
60.0
80.0
100.0
120.0
-0.0002 0.0002 0.0006 0.0010 0.0014
u2, u3 [m]
H2,
H3 [
N]
H2H3
2
3
0.0000 0.0004 0.0008 0.0012 0.0016
-20.0
0.0
20.0
40.0
60.0
80.0
100.0
120.0
-0.0002 0.0002 0.0006 0.0010 0.0014
u2, u3 [m]
H2,
H3 [
N]
H2H3
2
3
0.0000 0.0004 0.0008 0.0012 0.0016
Figure 3.14. Consecutive swipe BB19: a) load space experimental results, b) load space numerical
prediction, c) load-displacement experimental results, and d) load-displacement
numerical prediction.
The prediction matches the experimental data well for the combined horizontal swipe
shown in Figure 3.14. The slight difference in the prediction of the change in direction
in load space (that is, smaller vertical load) is likely to be due to an overestimation of
the shear modulus. It is also important to be aware that the input data for the numerical
simulations were idealised from the experimental data. In the experiment 2u increased
slightly after the application of 3u . There were also some minor movements of the other

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.31
degrees-of-freedom. If the actual experimental displacement paths are used for input
into the numerical model a slightly closer fit to the experiment is obtained.
The results from a numerical simulation of a second complex swipe test are shown in
Figure 3.15, where reasonably good agreement is evident.
-0.02
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H2/V
0, Q
/2R
V 0 [-
]
H2Q
2
-0.02
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H2/V
0, Q
/2R
V 0 [-
]
H2Q
2
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
0.000 0.001 0.002 0.003 0.004 0.005 0.006 0.007u2, 2Rω [m]
H2,
Q/2
R [N
]
H2Q
2
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
0.000 0.001 0.002 0.003 0.004 0.005 0.006 0.007u2, 2Rω [m]
H2,
Q/2
R [N
]
H2Q
2
Figure 3.15. Consecutive swipe BB27: a) load space experimental results, b) load space numerical
prediction, c) load-displacement experimental results, and d) load-displacement
numerical prediction.
The overprediction of horizontal load by the numerical model is largely attributed to
this curve falling slightly below the average curve that 0h is based on. The result in the
torsional direction is less good, as with the prediction of the single torsion swipe. While
in load space the prediction is reasonable, the numerical load-displacement curve does
not provide a good match to the experimental data, again showing much stronger

Chapter 3
3.32
softening. As highlighted in the previous section further work is required to address this
shortcoming in the model.
In carrying out the retrospective analyses of the swipe tests and radial displacement tests
it was evident that an accurate determination of the shear modulus G is important.
Unload-reload loops in the vertical load-displacement tests allow the shear modulus to
be estimated; however, typically these loops are hysteretic in character and so assessing
the modulus requires some judgement.
3.5 CONCLUSION
The development of hardening plasticity models for representing foundation response
has been dependent on both experimental and theoretical development. Initially,
experimental research on three degree-of-freedom loading allowed the development of
models applicable for planar loading (and structures). Though the theoretical framework
describing the extension to a six degree-of-freedom model had been suggested, this
paper describes the results of an experimental programme required to verify those
extensions and to derive numerous model parameters.
Specifically, a series of vertical load-displacement tests, swipe tests and radial
displacements tests were carried out using a loading device capable of applying general
loading to model foundations. This represents the first comprehensive set of
experimental evidence of the load-displacement behaviour of a shallow foundation
under true six degree-of-freedom loading. The footing used in the experimental work
was a rough circular flat foundation, and it was tested on loose silica sand.
The results have allowed the yield surface and plastic potential expressions for a six
degree-of-freedom plasticity model formulation to be assessed. A hardening law was

Investigating six-degree-of-freedom loading of shallow foundations on sand
3.33
suggested that included radial hardening components similar to work reported by Byrne
& Houlsby (2001). The elastic stiffness was derived from unload-reload loops of
vertical load-displacement tests. Finally, best fit values for the plasticity model
parameters in six degrees-of-freedom were evaluated and presented.
Retrospective analyses of the experiments using a numerical formulation of the
plasticity model, named ISIS, showed a good agreement with the experimental data.
However, further research is required to increase the confidence in the radial hardening
law parameters as well as the flow rule parameters, especially in the torsional direction.
3.6 REFERENCES
Bienen, B., Byrne, B.W. & Houlsby, G.T. (2005). Six degree-of-freedom loading of a circular flat footing on loose sand: Experimental data. Report No OUEL 2289/05, Department of Engineering Science, University of Oxford.
Butterfield, R., Houlsby, G.T. & Gottardi, G. (1997). Standardised sign conventions and notation for generally loaded foundations. Géotechnique, Vol. 47, No. 4, pp. 1051-1054; corrigendum Vol. 48, No. 1, p. 157.
Byrne, B.W. (2000). Investigations of suction caissons in dense sand. DPhil. thesis, University of Oxford.
Byrne, B. W. & Houlsby, G. T. (2001). Observations of footing behaviour on loose carbonate sands. Géotechnique, Vol. 51, No. 5, pp. 463-466.
Byrne, B.W. & Houlsby, G.T. (2005). Investigating 6 degree-of-freedom loading on shallow foundations. Proc. International Symposium on Frontiers in Offshore Geotechnics (ISFOG), Perth, pp. 477-482.
Cassidy, M.J. (1999). Non-Linear analysis of jack-up structures subjected to random waves. DPhil. thesis, University of Oxford.
Cassidy, M.J. & Bienen, B. (2002). Three-dimensional numerical analysis of jack-up structures on sand. Proc. 12th International Offshore and Polar Engineering Conference, Kitakyushu, Japan, pp. 807-814.
Cassidy, M.J. & Cheong, J. (2005). The behaviour of circular footings on sand subjected to combined vertical-torsion loading. International Journal of Physical Modelling in Geotechnics, Vol. 5, No. 4, pp. 1-14.
Cassidy, M.J., Byrne, B.W. & Houlsby, G.T. (2002). Modelling the behaviour of circular footings under combined loading on loose carbonate sand. Géotechnique, Vol. 52, No. 10, pp. 705-712.
Doherty, J.P. & Deeks, A..J. (2003). Elastic response of circular footings embedded in a non-homogeneous half-space. Géotechnique, Vol. 53, No. 8, pp. 703-714.

Chapter 3
3.34
Gottardi, G. & Butterfield, R. (1993). On the bearing capacity of surface footings on sand under general planar loads. Soils and Foundations, Vol. 33, No. 3, pp. 68-79.
Gottardi, G., Houlsby, G.T. & Butterfield, R. (1999). Plastic response of circular footings on sand under general planar loading. Géotechnique, Vol. 49, No. 4, pp. 453-469.
Hansen, J.B. (1961). A general formula for bearing capacity. Bulletin No. 11, Danish Geotechnical Institute, Copenhagen.
Hansen, J.B. (1970). A revised and extended formula for bearing capacity. Bulletin No. 28, pp. 5-11, Danish Geotechnical Institute, Copenhagen.
Houlsby, G.T. & Cassidy, M.J. (2002). A plasticity model for the behaviour of footings on sand under combined loading. Géotechnique, Vol. 52, No. 2, pp. 117-129.
Martin, C.M. (1994). Physical and numerical modelling of offshore foundations under combined loads. DPhil. thesis, University of Oxford.
Martin, C.M. & Houlsby, G.T. (2000). Combined loading of spudcan foundations on clay: Laboratory tests. Géotechnique, Vol. 50, No. 4, pp. 325-338.
Martin, C.M. & Houlsby, G.T. (2001). Combined loading of spudcan foundations on clay: Numerical modelling. Géotechnique, Vol. 51, No. 8, pp. 687-700.
Meyerhof, G.G. (1953). The bearing capacity of foundations under eccentric and inclined loads. Proc. 3rd International Conference on Soil Mechanics and Foundation Engineering (ICSMFE), Zürich, Vol. 1, pp. 440-445.
Nova, R. & Montrasio, L. (1991). Settlement of shallow foundations on sand. Géotechnique, Vol. 41, No. 2, pp. 243-256.
Schnaid, F. (1990). A study of the cone-pressuremeter test in sand. DPhil. thesis, University of Oxford.
Stewart, D. (1965). A platform with six degrees of freedom. Proc. Institution of Mechanical Engineers, Vol. 180, No. 15, pp. 371-384.
Tan, F.S.C. (1990). Centrifuge and numerical modelling of conical footings on sand. PhD thesis, University of Cambridge.
Vesic, A..S. (1973). Analysis of ultimate loads of shallow foundations. Journal of the Soil Mechanics and Foundations Division ASCE, Vol. 99. No. 1, pp. 45-73.
Vesic, A..S. (1975). Bearing capacity of shallow foundations. In Foundation Engineering Handbook (Eds. Winterkorn, H. F. & Fang, H.Y.), pp. 121-147, Van Nostrand, New York.

CHAPTER 4
4.1
ADVANCES IN THE THREE-DIMENSIONAL FLUID-STRUCTURE-SOIL INTERACTION ANALYSIS OF
OFFSHORE JACK-UP STRUCTURES
ABSTRACT
The operation of mobile jack-up drillings rigs in harsher ocean environments requires
enhanced understanding of their behaviour in storm loading conditions and suitable
numerical simulation tools for the assessment of their suitability for a particular site.
This paper introduces the numerical program SOS_3D, which incorporates appropriate
models for the three components of the structure, the soil and the environmental loading
of offshore structures like jack-ups. The program is formulated for three-dimensional
(3D) analysis and provides an integrated approach to the inter-related aspects of fluid-
structure-soil interaction analysis. In applying the program, results of an example jack-
up subjected to both symmetric and asymmetric loading situations are compared and
discussed. Quasistatic push-over analyses are used to illustrate aspects of jack-up
behaviour in three dimensions. Furthermore, jack-up response to storm loading
conditions is predicted in dynamic wave loading analyses, demonstrating the necessity
of 3D dynamic simulations and emphasising the benefit of using a force-resultant
foundation model based on plasticity theory.

Chapter 4
4.2
4.1 INTRODUCTION
Jack-ups were originally designed for use in shallow waters. However, the trend
continues to employ this type of units for year-round drilling in deeper water and
harsher environmental conditions (Lu et al. 2001). As accident rates due to geotechnical
and structural deficiencies remain comparatively high (Hunt & Marsh 2004), there is an
augmented desire to understand their behaviour under realistic loading conditions.
Jack-ups represent a class of offshore structure where the traditional methods of
separating the environmental loading, structural, and geotechnical modelling
components into individual analyses has proved inadequate in analysing the overall
system response. Even when integrated, coupled fluid-structure-soil interaction analyses
have usually employed complex methods in one or two of the areas but the simplest of
assumptions in the other. Typically, the rig’s superstructure is modelled in explicit detail
but at the same time the foundation conditions are oversimplified. However, all models
in a fluid-structure-soil interaction analysis should be developed to the same level. This
will yield the most appropriate predictions with the least danger of overestimating the
accuracy of the analysis results.
Thompson (1996), Williams et al. (1998) and Martin & Houlsby (1999) developed a
computer program incorporating advanced wave modelling, geometric non-linearity in
the structural modelling and force-resultant foundation models based on strain-
hardening plasticity theory for spudcans in overconsolidated clay. Although allowing
for an integrated and balanced approach to the simulation of jack-up response, this
program was limited to 2D analysis, with the result that only loading along the ‘axis of
symmetry’ of the rig could be simulated (as a plane frame analysis). 3D effects could
not be modelled.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.3
However, analysing jack-up behaviour in three dimensions is important due to the
following reasons:
• The rig may not have an axis of symmetry. Another possibility is a rig
symmetric in geometry and maybe even stiffness, but with loads on the topside
(e.g. drilling equipment, quarters, helipad) not evenly distributed with respect to
the ‘axis of symmetry’.
• Even if there is an axis of symmetry, environmental loading is unlikely to act
along it for the entire period of deployment of the rig. Furthermore, wind, waves
and current may not be collinear but act from different directions.
• The seabed surface is not always level. Difference in leg length between each of
the three legs (which will make a difference to the footing load paths and
ultimately to the hull deflections) due to a sloping mudline can only be
accounted for in a 3D analysis.
• The soil properties may vary for each of the individual footings and lead to
different spudcan penetrations and different stiffnesses between the footings, but
again in two dimensions not all three spudcans can be distinguished. The
conditions have to be simplified to axial symmetry assigning the same
conditions to at least two footings.
These reasons stress the need for advanced modelling techniques implemented into a
balanced fluid-structure-soil analysis program for the assessment of jack-ups in three
dimensions. This includes sophisticated 3D wave and footing models, integrated with a
structural model and overall solving routine for non-linear dynamic analysis. Such a
program is introduced in this paper. Also presented here are example simulations of a

Chapter 4
4.4
jack-up highlighting the benefits of the new 3D fluid-structure-soil analysis program for
offshore structures.
4.2 THE FLUID-STRUCTURE-SOIL INTERACTION PROGRAM SOS_3D
4.2.1 Introduction
The computer program SOS_3D (Simulation of Offshore Structures in 3 Dimensions) is
a finite-element program capable of analysing the fluid-structure-soil interaction of
offshore structures in either two or three dimensions (Figure 4.1 shows the global sign
convention). It has been developed to meet the needs for advanced analysis tools for the
site-specific assessment of mobile jack-up drilling rigs. However, other applications
exist and include analysis of offshore wind turbines, for instance. The program takes a
balanced approach to all three inter-related components of the structure, the foundations
and the environmental loading (wind, wave and current) with all models developed to
similar levels of sophistication.
Y
Z
X
Fy
Fx
Fz
My
Mx
Mz
Figure 4.1. SOS_3D sign convention.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.5
In SOS_3D, dynamic or quasistatic simulation of a system can be performed assuming
the structure to behave linear or geometrically non-linear. Restraints may be pinned,
fully-fixed or, importantly, use non-linear footing models developed in a plasticity
framework (known as ISIS footing models, with details given in Section 4.2.3). The
solution algorithm chosen is Newton-Raphson. Unless the simulation is entirely linear
(linear structure and no ISIS model footings), iteration is performed at each load level.
The integration method implemented for dynamic analyses is the implicit and
unconditionally stable ‘Newmark constant average acceleration’ (or Newmark
4/1=β ).
The finite element representation of a system can be separated into the formulation of a
mass matrix ][M , damping matrix ][C and stiffness matrix ][K , such that a dynamic
analysis problem may be formulated as
[ ] [ ]{ } [ ]{ } }{}{ PxKxCxM =++ &&& (4.1)
where }{x&& is the acceleration, }{x& the velocity, }{x the displacement and }{P the
external load applied. In an integrated fluid-structure-soil analysis, not only the structure
but also the footing conditions and hydrodynamic loading situation contribute to these
matrices. The following sections detail the models employed in SOS_3D.
4.2.2 The structural model
Unless detailed response of a particular part of the jack-up is sought, e.g. stresses in the
jacking system, explicit modelling of the structure is computationally uneconomical. In
order to obtain overall system response, it is sufficient (and allowed for in SNAME
2002) to model the structural members as equivalent beam elements and this is
performed here. However, due to the rigs’ tall and relatively flexible legs, geometric

Chapter 4
4.6
non-linearity (P-Δ effect) influences the response significantly (see Nelson et al. 2000,
for instance) and therefore is included in jack-up analyses.
4.2.2.1 The stiffness matrix
The numerical procedure to derive the stiffness matrix for large deformation analysis of
elastic frames adopted here is outlined in Kassimali (1983) for plane problems and
Kassimali & Abbasnia (1991) for space structures. Kassimali’s method accounts for
frames composed of prismatic members, with loads applied at the joints. Loads are
assumed to move with their respective joints as the structure deforms. The influence of
axial force on member flexural stiffness and changes in member chord length due to
axial strains and flexural bowing are taken into account. In earlier work (Oran 1973a),
the method is shown to be highly accurate, even in the presence of substantial
deflections. These procedures contain no assumptions beyond those already inherent in
conventional beam-column theory. Bernoulli theory is employed, assuming that plane
sections remain plane. However, in SOS_3D augmentation of the member end rotations
due to shear deformation can also be considered. This is detailed in Section 4.2.2.1.2.
Material nonlinearity is not considered in SOS_3D, thus limiting failure of the system to
soil-structure interaction.
4.2.2.1.1 Beam-column formulation
The forces on a beam-column in three dimensions are shown in Figure 4.2. The relative
member deformation vector may be written as },,,,,{ 2121 Luu tyyzz φθθθθ= and the
associated member end forces as },,,,,{ 2121 QLMMMMMS tyyzz= . These are
illustrated in Figure 4.3.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.7
M2y
M2x
M2z
M1y
M1x
M1z
F2y
F2x F2z
F1y
F1x F1z
y
x
z Z
Y
X
Figure 4.2. Beam-column forces in global coordinates (3D, after Kassimali & Abbasnia 1991).
y
x
x
z
Q
Q
Q
Q
MT
MT MT
MT
M1z
M1y
M2z
M2y
θ1z
θ1y
θ2z
θ2y
L(1+δ) u
1
1 2
2
Figure 4.3. Relative member deformations and corresponding forces (3D, after Kassimali and
Abbasnia 1991).
Their relationship based on the beam-column theory for elastic members is given as
)( 22111 jjjjj
j ccL
EIM θθ += yz, jfor = (4.2)
)( 21122 jjjjj
j ccL
EIM θθ += yz, jfor = (4.3)
tt
t Lc
M φ= (4.4)
LccLuEAQL bybz )( −−= (4.5)
where E is Young’s modulus, jI the moment of inertia about the j -axis, L the length
of the beam-column, and A the cross-sectional area. The elastic stability functions jc1

Chapter 4
4.8
and jc2 account for the change in bending stiffness of the member due to the presence
of an axial force and are therefore based on the axial force parameter
jjEulerj EI
QLQ
Qq 2
2
, π== (4.6)
For a member in compression, i.e. 0>jq , the stability functions are given by
2cot
21
))2
(cot22
cot2
(2
2
1jj
jjjjj
jcφφ
φφφφφ
−
−+= ,
2cot
21
))2
(cot22
cot2
(2
2
2jj
jjjjj
jcφφ
φφφφφ
−
+−= (4.7)
where
22jj qπφ
= (4.8)
For a member in tension, i.e. 0<q , they become
12
coth2
))2
(coth22
coth2
(2
2
1
−
+−=
jj
jjjjj
jcψψ
ψψψψψ
, 1
2coth
2
))2
(coth22
coth2
(2
2
2
−
−+=
jj
jjjjj
jcψψ
ψψψψψ
(4.9)
with
22jj q−
=πψ
(4.10)
These expressions differ slightly from those outlined by Kassimali (1983), which use
sin , cos and sinh , cosh functions and operate on jφ and jψ . However, for large
values of jψ the sinh function approaches infinity. Therefore, the formulation

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.9
containing coth , as given above, is preferred here. It can be shown that these two
different formulations of the stability functions yield the same results.
For a small axial force relative to the buckling load of the member, the stability
functions may become numerically unstable (Chen 1991) because of the small
deformations calculated. To circumvent this, series expressions are used to determine
the stability and bowing functions for 01.0≤q as outlined in Kassimali (1983).
Changes in torsional stiffness with axial load have not been considered (and are not
believed to be influential in a jack-up analysis). With the cross-sectional shape of jack-
up trusswork legs idealised as equivalent beams the torsional stiffness parameter is
constantly
GJct = (4.11)
where GJ is the torsional rigidity.
bjc in Equation 4.5 is the length correction factor caused by flexural deformations about
the j -axis and is dependent on the bowing functions jb1 and jb2 (Kassimali 1983).
The member tangent stiffness matrix in global coordinates is evaluated from
TRk
kgRkSTRTBkBRk DlocalDglobal ][6
1])(][[][]][][][[][ 33 ∑
=+= (4.12)
in which [ ]R is the coordinate transformation matrix, [ ]B accounts for any change in
member length, [ ]Dlocalk 3 is the member stiffness matrix in local coordinates, kS the
entries of the member end force vector },,,,,{ 2121 QLMMMMMS tyyzz= and ][ )(kg
the geometric matrices, as detailed in Kassimali & Abbasnia (1991).

Chapter 4
4.10
Importantly in a non-linear analysis, [ ]R refers to the deformed configuration of the
member, which is established with the aid of joint orientation matrices determining the
deformed configuration of the joints. This concept was introduced by Oran (1973b) to
overcome the difficulty that in 3D problems large rotations cannot be treated as
vectorial quantities. However, this formulation is based on the assumption that
incremental joint rotations are infinitesimally small and yields non-orthogonal joint
orientation matrices, which may lead to cumulative errors. Therefore, the more exact
method outlined in Kassimali & Abbasnia (1991) is used here.
The global stiffness matrix for the entire structure is assembled from the individual
member stiffness matrices.
4.2.2.1.2 Extension to include shear deformation effects
The assumption that plane sections remain plane is only valid in regions of constant
bending moment (i.e. where there is no transverse shear force (Timoshenko 1961)). As
wind and wave loading causes significant shear forces in jack-up legs, for accurate
modelling these should be incorporated. In 2D jack-up analysis these were accounted
for by Martin (1994), who modified the above equations to account for shear in a step-
by-step incremental procedure.
This formulation has been extended to 3D analysis and implemented into SOS_3D. The
only difference is that in three dimensions two angles are involved, so that the
procedure as detailed in Martin (1994) needs to be followed for the y-direction to
evaluate yadd ,θ and again, this time for the z-direction, to obtain zadd ,θ . For the same
reason, two shear parameters ys,β and zs,β are required.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.11
The augmentation of the member end rotations due to shear deformation is expressed
through
jaddijij ,θθθ += yz, j and 2 1, ifor == (4.13)
Because of the changes to j1θ and j2θ , new stability and bowing functions are required:
)(212)(12
21,
22
21,1
1jjjs
jjjsjj cc
cccc
++
−+=
ββ
(4.14)
)(212)(12
21,
21
22,2
2jjjs
jjjsjj cc
cccc
++
−+=
ββ
(4.15)
221,
,11 )](6[
36
jjjs
jj cc
bb
++=
β (4.16)
jj bb 22 = (4.17)
2212
221,
2211 )()](6[
36)(
jjjjjjsjjj
bj bccb
c θθβθθ
−++++
= (4.18)
with jc1 , jc2 from Equations 4.7-4.10 and the bowing functions jb1 and jb2 from
Kassimali & Abbasnia (1991).
The derivatives thus become
221,
21211 )](6[
)(182 jjjs
jjjjj cc
ccccc
++
′+′+
′−′=′
β (4.19)
221,
21122 )](6[
)(182 jjjs
jjjjj cc
ccccc
++
′+′+
′−′=′
β (4.20)
⎥⎥⎦
⎤
⎢⎢⎣
⎡
++
′+′−′
++=′
)(6)(2
)](6[36
21,
21,112
21,1
jjjs
jjjsjj
jjjsj cc
ccbb
ccb
ββ
β (4.21)
jj bb 22 ′=′ . (4.22)

Chapter 4
4.12
4.2.2.2 The mass matrix
In SOS_3D, consistent mass matrix is employed (see Przemieniecki (1968), for
instance). Rotatory inertial effects (differential displacements of the beam cross-
sectional area away from the neutral axis with regard to the displacement experienced at
the neutral axis) are neglected. The global mass matrix for the entire structure is
assembled from the element mass matrices after their transformation into the global
coordinate system.
It would be possible to derive a time-varying mass matrix, including corrections to
account for axial load and shear effects. However, the increase in accuracy would be
small since the mass matrix is derived using only the shape functions themselves, and
not their differentials, as in the stiffness matrix formulation (Williams et al. 1998).
Therefore, the structural mass matrix is considered constant in SOS_3D. Only relative
motion due to wave loading may change the system mass matrix. This is explained in
Section 4.2.4.1.
4.2.2.3 The damping matrix
In the dynamic evaluation of nonlinear structural response, an explicit damping matrix
is required. In SOS_3D, Rayleigh damping is used. The Rayleigh damping factors, 0a
and 1a , are evaluated by the solution of a pair of simultaneous equations with the
damping ratios associated with two specific modes specified by the user.
Setting the damping in two low modes renders the damping in the higher modes
artificially high (Clough & Penzien 1993). This is useful for jack-up analysis because
the primary response is in the surge and sway modes. These are the two lowest modes,
so the larger damping in the higher modes helps to filter out the high mode responses.
Furthermore, it can be seen that the lower modes are damped mainly by mass

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.13
proportional damping and the higher modes by stiffness proportional damping. Because
the structural mass matrix is time invariant and the lower modes are of main interest, the
Rayleigh damping matrix in SOS_3D is not altered during the time stepping procedure.
However, relative motion due to wave loading may introduce additional hydrodynamic
damping as outlined in Section 4.2.4.1.
4.2.3 The soil-structure interaction model (ISIS)
Accurate footing modelling is crucial in the prediction of overall jack-up response. Not
only do the footing conditions affect the hull displacements and stresses at the leg-hull
interface directly, but also indirectly as foundation fixity significantly influences the
dynamic characteristics of the unit. This becomes especially important as the jack-up’s
natural period approaches that of the ocean environment.
Footing assumptions such as pinned restraints or springs oversimplify the foundation
behaviour (see Brekke et al. 1989, 1990, for instance), are incapable of predicting
failure and may even lead to unconservative results. This has been shown in 2D
dynamic analyses by, amongst others, Williams et al. (1998). Furthermore, several case
studies (Morandi et al. 1998; Nelson 2000; Stock et al. 2000; Meyer et al. 2004)
reported greater restraint at the spudcans than that predicted when using the current
guidelines, the SNAME (2002).
Therefore, a footing model which accurately predicts the non-linear load-displacement
behaviour of spudcans is required. Furthermore, the model needs to be amenable for
numerical analysis. Force-resultant models, which formulate the soil-foundation
interaction as a ‘macro element’, have been developed in terms of strain-hardening
plasticity theory. These models can be implemented into conventional analysis
programs, with the advantage that the complete non-linear soil-footing behaviour can be

Chapter 4
4.14
incorporated directly as a ‘point’ element attached to the node of a structural element.
This eliminates any need for continuum elements representing the soil body and for
special interface elements between the structure and the soil. Force-resultant models
based on plasticity theory have successfully been applied to simulate monitored
offshore jack-up data (Cassidy et al. 2002b).
The force resultant models implemented into SOS_3D are called ISIS (Houlsby 2003;
Cassidy et al. 2004). They are based on single-surface strain-hardening plasticity theory
and feature four main components: a yield surface, a representation of elastic behaviour,
a hardening law, and a flow rule. Once the yield surface is established, any changes of
load within this surface are assumed to be entirely elastic. When the load state touches
the yield surface it is usual for the foundation to penetrate further into the soil, causing
plastic deformations to occur, the capacity of the foundation to increase (expansion of
the yield surface) and the stiffness to reduce. The evolution of vertical load capacity
with plastic displacement is determined by the hardening law, which in turn defines the
size of the yield surface. The ratios between the plastic footing displacement
components during yield are predicted by the flow rule.
In a jack-up analysis, during the installation phase a yield surface for each of the
spudcan footings is set up, which expands corresponding to the vertical load (preload)
applied to the footings and the related plastic displacement (hardening law). When the
preload is shed, the vertical load on the spudcans reduces to the rig’s self-weight
(assuming calm conditions and thus no environmental loading) such that the footings’
load points lie inside the respective yield surface established during preload. Any
environmental loading on the rig applies combined loading of the jack-up’s footings,
and the different ratios between the load magnitudes in the various degrees-of-freedom

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.15
results in each footing tracing a different load path. Initially, these lie inside the preload
yield surface and are modelled as entirely elastic response. However, if the combined
loading exceeds the load capacity of the current yield surface, the footing yields. In the
process, the yield surface expands (according to the hardening law) and plastic
deformations occur (the ratios between which are determined by the flow rule).
ISIS features options to model flat circular footings, cones, spudcans or suction caissons
on clay or sand, but for non-layered soil conditions only. Although originally developed
for planar loading from experimental tests in clay (Martin 1994), dense silica sand
(Gottardi et al. 1999) and loose carbonate sand (Byrne & Houlsby 2001), the models
have been extended to cater for general combined loading in three dimensions.
Additional experimental data from Cassidy & Cheong (2005) and Bienen et al. (2005)
has been used to validate the ISIS formulation for flat circular footings on sand in 3D
space.
Details on the development and formulation of the ISIS models can be found in Martin
(1994), Martin & Houlsby (1999, 2001) for clay, Cassidy (1999), Cassidy & Houlsby
(2002), and Houlsby & Cassidy (2002) for dense silica sand, Cassidy et al. (2002a) for
loose carbonate sand and Bienen et al. (2006) for loose silica sand. The main features of
the model as well as the parameter values used for the example analyses presented in
this paper are summarised in Table 4.1. These parameters represent loose silica sand
conditions and are based on the experiments by Bienen et al. (2005).
The integration of ISIS model footings into an SOS_3D analysis influences the response
through the system matrices. The stiffness matrix for each footing is evaluated and
incorporated into the system stiffness at every iteration, thereby changing the overall
stiffness. The spudcan mass is not specified separately but included in the mass of the

Chapter 4
4.16
Model Comp.
Main Equations Constant [dimension]
Explanation
Geometry R [m] Footing radius
G [kN/m2] Representative shear modulus
vk [-] Elastic stiffness factor (vertical)
hk [-] (horizontal)
ck [-] (horizontal/moment coupling)
qk [-] (torsion)
Elasticity
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
e
e
e
e
e
e
mc
mc
q
ch
ch
v
RdRdRddududw
kkkk
kkk
kkk
GR
RdMRdM
RdQdHdHdV
3
2
3
2
3
2
3
2
222
00000000000000000
000000000
2
2/2/
2/
θθω
mk [-] (moment)
0h [-] Dimension of yield surface (horizontal)
0m [-] (moment)
0q [-] (torsion)
a [-] Eccentricity of yield surface
1β [-] Curvature factor for yield surface (lowstress)
Yield surface 2
000
232
00
22
00
3 2220
VmhR/MaH
-Vm
R/MVh
Hf ⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛==
2
002
000
32
2
00
3
2
00
2 2/2/22/⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
VqRQ
VmhRMaH
VmRM
VhH
21
21
212
0
2
0
2
21
21 1ββ
ββ
) β (β
VV -
VV
ββ) β (β
- ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⎥
⎦
⎤⎢⎣
⎡ + +
2β [-] Curvature factor for yield surface (high stress)
3β [-] Curvature factor for plastic potential (low stress)
4β [-] Curvature factor for plastic potential (high stress)
hα , mα [-] Association factors
(horizontal, moment)
Flow rule 2
000
23
2
00
2
2
00
3 2220Vmh
RMaHVmRM
VhHg
mhmh ′−⎟⎟
⎠
⎞⎜⎜⎝
⎛′
+⎟⎟⎠
⎞⎜⎜⎝
⎛′
==αααα
2
002000
32
2
00
3
2
00
2
'2/
'2/2
'2/
' ⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
VqRQ
VmhRMaH
VmRM
VhH
qmhmh ααααα
( )( )
( ) ( )
43
43
432
0
2
0
2
43
43 1ββ
ββ
ββ
ββββ
⎟⎟⎠
⎞⎜⎜⎝
⎛′
−⎟⎟⎠
⎞⎜⎜⎝
⎛′⎟
⎟⎠
⎞⎜⎜⎝
⎛ +−
+
VV
VV
qα [-] Association factor (torsion)
1k [N/mm]
1w [mm]
Hardening law
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+=
2
110
1
1
wz
wz
zkVp
p
p
2w [mm]
Hardening law parameters
Table 4.1. ISIS features and parameters used in the example analyses of spudcans on loose silica

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.17
Values used loose silica sand
Notes
For partially embedded spudcans defined as the radius of a cone with equivalent embedded volume as outlined in Martin (1994).
5.0
⎟⎟⎠
⎞⎜⎜⎝
⎛=
aa ApVg
pG
(g = 400)
An appropriate shear modulus G is one of the most difficult parameters to establish. The estimate used here relates G to the atmospheric pressure pa, the vertical load V and the plan area of the footing in contact with the soil A through the coefficient g (Cassidy et al. 2004).
2.904
2.901
-0.208
0.918
0.548
These dimensionless elasticity coefficients may be derived using finite-element analysis of a footing. They depend on the geometry of the footing (e.g. depth of embedment and shape) as well as the Poisson’s ratio of the sand. These values used here were derived by Doherty & Deeks (2003) using the scaled boundary finite element method for a flat circular footing at the bottom of an open trench and a Poisson’s ratio of 0.2.
0.122
0.075
0.033
-0.112
0.76
0.76
The shape of the yield surface has been determined empirically and the yield surface parameters chosen to provide a best fit to the experimental data. The development of the yield surface in (V, H3, M2/2RV0) space is documented in Cassidy (1999). An extension of the expression to cater for all six degrees-of-freedom has been proposed in Cassidy & Bienen (2002). The yield surface parameters for loose silica sand used here are based on the experimental evidence by Bienen et al. (2005), which is discussed in detail in Bienen et al. (2006).
0.52
0.52
1.0… 3.3
1.0… 5.0
Due to non-association in the deviatoric plane a plastic potential (g) different to the yield surface is required. A similar expression to that of the yield surface is applied, but scaled in shape and size by the association factors (αh, αm and αq). The ‘best-fit’ values of αh and αm have shown variability to displacement path (Cassidy 1999), with the values here representing a compromise solution to the loose silica sand data. In fitting αq the same variation as for αh and αm was assumed (Bienen et al. 2006).
51.25
20.50
8.00
The total plastic displacemement zp is obtained from the summation of the incremental plastic displacement given by
ppppppp RcRRcuucwz ωθθ &&&&&&& 2)2()2( 32
32
2223
221 +++++=
with c1 = 1.07, c2 = 0.62 and c3 = 1.09 For more detailed information on the hardening law refer to Bienen et al. (2006).
sand in this paper.

Chapter 4
4.18
leg member it is attached to in the structural model. Since the damping matrix is
determined form a combination of the stiffness and mass matrices, it is influenced by
the footing stiffness. As the damping matrix is not altered during the analysis, it is
evaluated before the start of the time stepping procedure incorporating the initial footing
stiffness after preload.
4.2.4 The environmental loading model
Environmental loads on offshore structures are caused by waves, current and wind.
Waves occur at periods likely to excite dynamic response in a jack-up and therefore the
spectrum of frequency components of the wave loading must be modelled realistically.
On the other hand, current and wind vary slowly compared to the natural periods of
jack-up oscillations (Williams et al. 1998) and are therefore treated as steady
phenomena in SOS_3D.
In SOS_3D, hydrodynamic loading from waves and current is calculated for each time
step (using the module WAVE3D). Any other loads, wind for instance, may be applied
as point loads on the nodes of the system. These may or may not vary with time.
4.2.4.1 The wave loading model (WAVE3D)
The choice of wave theories in SOS_3D to evaluate the surface elevations and wave
kinematics include Airy and NewWave (Tromans et al. 1991), with the extended
Morison equation incorporating relative motions employed to calculate the
hydrodynamic loads on the jack-up legs. Further, using the extended Morison equation,
the added mass and hydrodynamic damping matrices are also evaluated and
incorporated into the respective system matrices.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.19
Horizontal particle kinematics are calculated at the undeflected beam position, with the
equivalent nodal loads found by integrating the distributed load with the corresponding
shape function (using Gaussian integration techniques). As part of the motivation for
developing SOS_3D was to investigate asymmetric loading conditions, a wave
approach direction can be specified with spatial variation taken into account.
For the example analyses detailed in this paper NewWave theory will be used. This
method accounts for the spectral composition of the sea, but is still deterministic
(Tromans et al. 1991). As such it was designed as an alternative to both regular wave
and full random time domain simulations of lengthy time histories. By assuming that
the surface elevation can be modelled as a Gaussian random process, the expected
elevation at an extreme event (for example a crest) can be derived theoretically as a
scaled autocorrelation function (Lindgren 1970; Boccotti 1983). The autocorrelation
function is proportional to the inverse Fourier Transform of the surface energy
spectrum, allowing the surface elevation to be determined efficiently. Using linear wave
theory the kinematics can also be easily derived.
A NewWave crest can be positioned in time and space, such that the maximum crest
height passes that point at the specified moment in SOS_3D time. The shape of a
NewWave is determined by the choice of spectrum. Currently, JONSWAP and Pierson-
Moskowitz are implemented. Stretching theories incorporated into WAVE3D include
Wheeler, Delta and Vertical stretching (Wheeler 1970; Rodenbusch & Forristall 1986).
Current can be superimposed on the wave loading. Its distribution is assumed constant
in WAVE3D. The current velocity is added to the wave kinematics velocity before the
Morison equation is employed.

Chapter 4
4.20
The presence of hydrodynamic loading influences the mass as well as the damping
matrix. The amount of hydrodynamic damping changes for every load increment.
4.3 APPLICATIONS OF SOS_3D
4.3.1 Overview of analyses
This section discusses example analyses of a generic model jack-up (shown in
Figure 4.4a) using SOS_3D.
H2 2
M2
V
2R
1
Q
H3 3
M3
a)
Spudcan 3,Leg 3
α
Hull reference point
Spudcan 1,Leg 1
Spudcan 2,Leg 2
Loadingdirection
7.75 10.0
1.8 2.9
2.25
Leg attachment point
b) c)
Figure 4.4. (a) Generic jack-up, idealised model jack-up and spudcan with ISIS footing model
sign convention; (b) hull plan and loading direction; and (c) spudcan dimensions.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.21
The model represents a typical jack-up operating in 100 m water depth. The rig’s
trusswork legs are idealised as equivalent beams as allowed for in SNAME (2002). The
hull is simplified and discretised as a grillage of beam elements. Note that although non-
linearity in the leg-hull connections is recognised, these joints are modelled as infinitely
stiff. The spudcan geometry chosen for the analyses is shown in Figure 4.4c. The jack-
up and soil model properties are provided in Table 4.2. The parameters for the ISIS
footing model are based on experimental evidence from single footing tests under six-
degree-of-freedom loading (Bienen et al. 2006) and are listed in Table 4.1.
Jack-up and spudcan properties
Leg length 130.0 [m] Mean water depth 100.0 [m]
Separation of fwd. leg to centerline of aft legs 64.95 [m] Separation aft legs 75.0 [m]
Young’s modulus (E) 200 [GPa] Shear modulus (G) 80 [GPa]
Iy, leg, Iz, leg 10.843 [m4] Iy, hull, Iz, hull 40.0 [m4]
Jleg 0.849 [m4] Jhull 9.0 [m4]
Aleg 0.6 [m2] Ahull 2.0 [m2]
Shear area As, leg 0.04 [m2] Shear area As, hull 0.2 [m2]
Equivalent diameterleg 8.44 [m] Equivalent diameterhull 8.44 [m]
Hydraulic area Ah, leg 3.94 [m] Hydraulic area Ah, hull 3.94 [m]
Massleg 2.0E6 [kg] Masshull 16.1E6 [kg]
Preload per spudcan 144.5 [MN] Self-weight per spudcan 72.3 [MN]
Soil properties
Submerged unit weight γ′ 10 [kN/m3] Friction angle φ 34.3 [°]
Table 4.2. Jack-up, spudcan and soil properties.
The example analyses discussed in this paper include:
1) Quasistatic push-over analyses to explain and visualise the 3D system
behaviour due to combined loading. Some interesting aspects are explored
and the benefits of the novel program options highlighted. Quasistatic

Chapter 4
4.22
simulation with point loading has been chosen to illustrate the main points of
the new analysis tools yet keep the complexity to a minimum.
2) A pure torsional push-over analysis, which is compared with the horizontal
push-over analyses. Although this example simulation is of academic nature
it is helpful to highlight and understand torsional effects that might occur in
an in situ loading condition where the storm direction does not coincide with
the ‘axis of symmetry’ of the jack-up.
3) Example analyses of a jack-up under storm loading conditions. These
simulations are performed using the dynamic solving option of SOS_3D.
Corresponding to field installation practise, all analyses begin with preloading of the
spudcan footings to twice the system’s self-weight in total. In exposing the footings to
greater vertical load than expected during operation, the footings are ‘proof-tested’.
Numerically, the vertical load is applied as point loads on the leg-hull connections.
Effectively in the ISIS models, this expands a yield surface to the size determined by the
magnitude of preload. The (plastic) penetration of the spudcan corresponding to the
preload level and soil conditions is determined through the hardening law. At the end of
the preloading phase the ballast water is shed, which brings the jack-up back to its self-
weight. In the numerical ISIS footing model, the load path retraces back along the
vertical axis, with the load point due to self-weight lying within the yield surface. If the
system now experiences combined loading, the footing load state will at least initially
be within this yield surface and the footing response will be elastic. However, once the
applied load exceeds the combined load capacity determined by the size of the yield
surface, the response will be elasto-plastic.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.23
4.3.2 Quasistatic push-over analyses
4.3.2.1 Horizontal push-over analyses
In the following, a set of push-over analyses is discussed, in which the horizontal push-
over load is applied as three discrete point loads (Figure 4.5a) acting on each respective
leg at the height of the mean water surface (100 m). The horizontal loading is
monotonically increased until the foundations of the jack-up fail. Subsequently, ‘applied
horizontal load’ refers to the total horizontal load (i.e. H3 , Figure 4.5a).
To compare the influence of loading direction, in a series of analysis the horizontal
loading is varied in 5°-increments (Figure 4.4b). Since the model rig is symmetric,
variation of the loading direction over 60° provides information on all possible
orientations to the jack-up hull.
H
H
H
H
H
H
a) α = 0° α = 60° b) Applied torsion Q = 3H
H
H
H Q
Figure 4.5. Load application for: (a) example loading directions in horizontal push-over; and (b)
torsional push-over.
In order to be able to compare horizontal loads and displacements as well as moments
and rotations for the various loading directions, the respective components are resolved
into resultants. This means that horizontal loads on the spudcans, for instance, are
expressed in resultant H rather than 2H and 3H (inset Figure 4.4a). All hull
displacements refer to the hull reference point shown in Figure 4.4b.
a) b)

Chapter 4
4.24
4.3.2.1.1 Hull displacements and failure loads
Figure 4.6 shows the hull displacements at failure. The failure load of the generic model
jack-up increases steadily as the loading direction is varied from the axis-symmetric
case of ‘one leg windward, two legs leeward’ (corresponding to α = 0°, Figures 4.4b and
4.5a) through asymmetric conditions to α = 60° (axis-symmetry, ‘two legs windward,
one leg leeward’). The resultant hull displacements increase with the failure load,
linearly in the case of the rotations and horizontal displacements, but in a slightly non-
linear fashion for the vertical displacements. Note that the hull rotation and horizontal
displacement indicate resultant magnitudes only, not directionality of the deformation.
Vertical movement into the seabed is negative in the SOS_3D sign convention
(Figure 4.1).
3.0
3.5
4.0
4.5
5.0
5.5
6.0
6.5
7.0
7.5
22.0 24.0 26.0 28.0 30.0 32.0 34.0 36.0Applied horizontal load [MN]
Hor
izon
tal h
ull d
ispl
acem
ent [
m]
Loading direction
0
60
-3.96
-3.94
-3.92
-3.90
-3.88
-3.86
-3.84
-3.82
-3.80
-3.78
-3.76
22.0 24.0 26.0 28.0 30.0 32.0 34.0 36.0Applied horizontal load [MN]
Vert
ical
hul
l dis
plac
emen
t [m
]
0
60
Loading direction
0.000
0.001
0.002
0.003
0.004
0.005
0.006
22.0 24.0 26.0 28.0 30.0 32.0 34.0 36.0
Applied horizontal load [MN]
Hul
l rot
atio
n [r
ad]
Loading direction
0
60
-0.003
-0.002
-0.002
-0.001
-0.001
0.000
0.001
22.0 24.0 26.0 28.0 30.0 32.0 34.0 36.0Applied horizontal load [MN]
Hul
l tor
sion
[rad
]
Loading direction
0 60
40
Figure 4.6. Hull displacements at the hull reference point at failure.
a) b)
c) d)

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.25
Hull torsion at failure is zero as expected for both axis-symmetric cases (α = 0° and
α = 60°) whilst at a loading direction of α = 40° the jack-up hull experiences the most
twist (Figure 4.6). Figure 4.7 illustrates the hull torsion with increasing push-over load
for all loading directions considered. It can be seen that in the early stage of push-over
the hull torsion increases with the applied load at the same rate for pairs of loading
directions, for example α = 0° and α = 60° or α = 15° and α = 45°. However, as the jack-
up approaches failure, the gradient increases implying additional deformation with only
a slight increase in load. The paths of hull torsion of the loading direction pairs diverge
as orientations of the jack-up to the push-over load of between α = 0° and α = 30° fail.
Although initially following the same paths in hull torsion with applied load as their
respective ‘counterparts’, the loading directions of α = 35-60° prove more stable and fail
at higher push-over loads. The reasons for this are explored further in Section 4.3.2.1.2.
-0.0025
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0
Applied horizontal load [MN]
Hul
l tor
sion
[rad
]
600
5
55
10
50
15
45
20
4035
30
25
Figure 4.7. Torsional hull displacements at the hull reference point during the horizontal push-
over.
The significantly larger horizontal hull displacement (Figure 4.6) in comparison to the
horizontal spudcan displacements (shown for spudcans 1 and 3 in Figure 4.11) is due to
the spudcan rotations as well as the differential settlement of the footings being

Chapter 4
4.26
projected over the large leg length. Another contributing factor is bending of the jack-up
legs. The vertical hull displacements in Figure 4.6 include spudcan settlement during
preload as well as during the subsequent push-over phase.
Figure 4.8 shows contour lines of horizontal hull displacement during push-over. This
plot contains directionality as well as magnitudes of the displacement components. The
lines connect the displacement components for all directions (varying over 360º) of
loading at a given applied push-over force. The values for any one loading direction
during the push-over, on the other hand, stretch radially outwards (as the displacements
increase with increasing load). Each test is carried out to failure. Therefore, the weakest
loading configurations are those for which the radial lines extend outwards the least.
-8.0
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
8.0-8.0 -6.0 -4.0 -2.0 0.0 2.0 4.0 6.0 8.0
Horizontal hull displacement (x component) [m]
Hor
izon
tal h
ull d
ispl
acem
ent (
z co
mpo
nent
) [m
]
0
60
Figure 4.8. Contour lines of horizontal hull displacement components for all loading directions.
The plot highlights how the failure load increases as the loading direction is varied from
α = 0° to 60°. However, even if the jack-up can sustain a large amount of push-over
load the displacements may become excessive. Note also that even if the critical loading
direction is identified here as ‘one leg windward, two legs leeward’ (α = 0°), this applies

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.27
only to the jack-up geometry and loading conditions considered here and may be very
different if the rig was not symmetric or the loading conditions varied.
4.3.2.1.2 Spudcan loads and displacements
In order to understand the jack-up behaviour more fully, the spudcan load and
displacement paths are explained in the following. The footing loads are shown in
Figure 4.9, normalised by the preload 0V . The push-over load applied at the jack-up legs
results in horizontal as well as moment load at the spudcans and, depending on the
loading direction, even torsion. Further, the overturning motion of the rig is reacted to
by a vertical push-pull mechanism between the individual spudcans, leaving the
windward footing(s) vertically more lightly loaded than the leeward one(s). Under the
loading conditions assumed for this set of analyses, this is most pronounced for the two
symmetrical orientations.
For α = 0°, the downward push is shared equally by the two leeward legs, resulting only
in minor changes in vertical load whereas the windward leg alone resists the full upward
force, reducing the vertical load on the leg significantly. For α = 60°, on the other hand,
the single leeward leg is most heavily loaded whilst the two windward legs shed their
vertical load slowly. The changes in vertical loading due to this push-pull mechanism
for the asymmetric orientations fall in between. This produces a different load path for
each of the footings and the ‘fan’-like appearance of the curves in Figure 4.9.
Initially, the response is elastic but each footing yields as its combined load point
reaches the yield surface set up during preload. The point of yield is clearly visible as a
kink in the curves in Figure 4.9. Although seemingly very similar in the plots, yield
occurs at different magnitudes of applied push-over loads for each of the footings.

Chapter 4
4.28
Moment loading clearly dominates at first as yield occurs at 072.02/ 0 ≈RVM
compared to the yield surface size in this plane of 075.00 =m . At the same time,
013.0/ 0 ≈VH and 50 106.32/ −×≈RVQ , which is well below the yield surface size in
those respective planes ( 122.00 =h , 033.00 =q ).
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
0.0 0.2 0.4 0.6 0.8 1.0 1.2V/V0 [-]
H/V
0 [-]
0
Spudcan 1 60
30
030
Spudcan 2
Spudcan 3
3060
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.0 0.2 0.4 0.6 0.8 1.0 1.2V/V0 [-]
M/2
RV 0
[-]
0
Spudcan 1
6030
0
Spudcan 2
Spudcan 3
30 60
30
-0.0001
0.0000
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0 0.2 0.4 0.6 0.8 1.0 1.2V/V0 [-]
Q/2
RV 0
[-]
Spudcan 1
60
40
0
-0.0001
0.0000
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0 0.2 0.4 0.6 0.8 1.0 1.2V/V0 [-]
Q/2
RV 0
[-]
060
Spudcan 2
3040
-0.0001
0.0000
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0 0.2 0.4 0.6 0.8 1.0 1.2V/V0 [-]
Q/2
RV 0
[-]
0
Spudcan 3
30
60
40
Figure 4.9. Spudcan reactions during horizontal push-over.
a) b)
c) d)
e)

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.29
As the footing yields, the load path tracks the expanding (or contracting) yield surface
such that the moment reduces non-linearly as the horizontal reaction continually
increases. The load paths in combined load space are different for each of the spudcans
and constantly change throughout the analysis. For the asymmetric orientations, torsion
load also influences the load paths and claims part of the combined capacity for the
individual spudcan. Further, the amount of yield is different for each footing. This
results in different combined load capacities through the different yield surface sizes for
the individual spudcans.
The aspects of load combination, location of the load point on the yield surface and
amount of yield do not only influence each other for each individual footing, the
spudcans also affect each other through system behaviour. Any load that is shed from
one spudcan must be accommodated by the others. Therefore, loss of capacity of one
footing does not necessarily imply failure of the whole system. Only if the applied load
cannot be sustained by the interaction of the three footings does the jack-up fail. This
could be due to sliding of a (usually windward) footing or plunging of a (usually
leeward) footing.
4.3.2.1.3 Example: spudcan reactions for the loading direction of α = 40°
Figure 4.10 shows the load-displacement paths for the spudcans at a loading direction of
α = 40°. The footings yield almost simultaneously. While the yield surface for footing 3
expands until failure, it contracts for spudcan 1. The yield surface size defining the load
capacity for spudcan 2 increases only slightly.
Although the horizontal and torsional loads on all three spudcans steadily increase,
albeit at different rates, the moment loads reduce from the point of yield. The
overturning motion redistributes vertical load from spudcan 1 to 3, whilst the changes

Chapter 4
4.30
on spudcan 2 are less pronounced. The load paths of the three spudcans in their
respective combined load space change throughout the push-over, most visibly between
footings 1 and 3. The jack-up fails as spudcan 1 slides horizontally while twisting under
torsion. At the same time, spudcan 3 can no longer sustain the moment load it carries.
0.0
2.0
4.0
6.0
8.0
10.0
12.0
0.00 0.05 0.10 0.15 0.20 0.25Resultant horizontal displacement [m]
Res
ulta
nt h
oriz
onta
l loa
d [M
N] Spudcan 1
Spudcan 2
Spudcan 3
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.0000 0.0002 0.0004 0.0006 0.0008 0.0010 0.0012 0.0014Resultant torsion [rad]
Res
ulta
nt to
rsio
nal m
omen
t [M
Nm
]
Spudcan 1
Spudcan 2
Spudcan 3
0.0
20.0
40.0
60.0
80.0
100.0
120.0
0.00 0.01 0.02 0.03 0.04 0.05 0.06Resultant rotation [rad]
Res
ulta
nt m
omen
t [M
Nm
]
Spudcan 1
Spudcan 2
Spudcan 3
Figure 4.10. Spudcan load-displacement paths during horizontal push-over for loading direction
α = 40°.
4.3.2.1.4 Mechanisms at failure for the different loading directions
Under the assumed loading conditions, failure of the model jack-up is triggered by
different mechanisms for each loading direction. If the push-over results in one
vertically very lightly loaded leg and little torsion such as for α = 0° or similar, the
windward leg fails in sliding. However, for loading directions between α = 15° and 25°,
torsion dominates failure on spudcan 1 over horizontal sliding. Figure 4.11a shows the
a) b)
c)

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.31
resultant horizontal displacement on spudcans 1 indicating sliding of the vertically
lightly loaded footing whereas Figure 4.11b illustrates no such failure is evident on
spudcans 3.
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0Applied horizontal load [MN]
Res
ulta
nt h
oriz
onta
l dis
plac
emen
t [m
]
Spudcan 1
0
30
60
0.00
0.05
0.10
0.15
0.20
0.25
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0Applied horizontal load [MN]
Res
ulta
nt h
oriz
onta
l dis
plac
emen
t [m
]
Spudcan 3
0
30
60
Figure 4.11. Resultant horizontal displacements during push-over on spudcans 1 and spudcans 3.
-0.0001
0.0001
0.0003
0.0005
0.0007
0.0009
0.0011
0.0013
0.0015
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0Applied horizontal load [MN]
Tors
ion
[rad
]
Spudcan 1
060
30
-0.0001
0.0001
0.0003
0.0005
0.0007
0.0009
0.0011
0.0013
0.0015
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0Applied horizontal load [MN]
Tors
ion
[rad
]
Spudcan 2
0 60
30
-0.0001
0.0001
0.0003
0.0005
0.0007
0.0009
0.0011
0.0013
0.0015
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0Applied horizontal load [MN]
Tors
ion
[rad
]
060
30
Spudcan 3
Figure 4.12. Torsional displacements on the spudcans during horizontal push-over.
a) b)
a) b)
c)

Chapter 4
4.32
The effect of torsional twist on the spudcans is depicted in Figure 4.12. Horizontal or
torsional sliding failure is observed as the spudcan displacement increases without any
further increase in load in that particular direction.
Increasing the angle of push-over load to the axis of symmetry of the jack-up exhausts
the combined load capacities of all three footings nearly simultaneously, rather than
failing one footing first. As torsion remains insignificant for α = 60°, all of the
combined load capacity is available for horizontal and moment loading. However, as the
moment capacities on the two windward footings reduce to almost zero shedding load
onto leg 3, this single leeward leg fails prompting failure of the whole system. In all
loading directions is the response of each individual spudcan affected by system
behaviour of the jack-up. Not only do the load paths change for a particular footing
throughout the push-over, but the loads are also re-distributed between the footings. It is
therefore paramount to model the footing behaviour accurately in order to obtain good
predictions of the jack-up’s response as a system.
4.3.2.2 Torsional push-over analysis
Most interesting is the development of torsion on the jack-up footings during the
horizontal push-over analyses. For some loading directions the spudcan attracting the
most torsional load (Figure 4.9) is not necessarily the footing with the most torsional
displacement (Figure 4.12). The reasons for this behaviour are complex, but mainly lie
in: (i) the varying elastic stiffness due to change in the shear modulus G with vertical
load (Table 4.1) as well as (ii) different magnitudes in the increase in plastic
displacement increments. The latter depends on the flow rule and the hardening law:
The location of the load point on the yield surface at the time of yield determines the
direction of the plastic displacement increment vector and thereby the ratios of the

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.33
plastic displacement components through the flow rule. The hardening law then
determines the magnitude of change in plastic displacements.
In order to explore the effect of torsion on the system behaviour further, a somewhat
hypothetical analysis is performed during which only torsion is applied (at the hull
reference point, in addition to the self-weight of the rig, Figure 4.5b). As before in the
horizontal push-over analyses, the load magnitude is constantly increased until failure.
The applied torsional moment is negative with respect to the SOS_3D sign convention.
The resulting hull displacements reveal that pure torsion only leads to torsional and
vertical hull displacements; the horizontal and rotational components remain zero
throughout. The system twists about the hull reference point. The hull displacements are
plotted in Figure 4.13 against equivalent applied horizontal load in order to be able to
compare the pure torsional analysis with the horizontal push-over simulations discussed
above. In the case of pure torsion, the vertical displacement of the hull increases at a
similar gradient when compared to the horizontal push-overs. The sustained torsional
twist just before failure, on the other hand, is about 50 times larger if the jack-up is
subjected to torsion only. The system’s capacity is similar to α = 30° in the horizontal
push-over.
-3.95
-3.90
-3.85
-3.80
-3.75
-3.70
-3.65
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0Applied horizontal load [MN]
Vert
ical
hul
l dis
plac
emen
t [m
]
0
60
Torsion
-0.14
-0.12
-0.10
-0.08
-0.06
-0.04
-0.02
0.00
0.02
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0Applied horizontal load [MN]
Hul
l tor
sion
[rad
]
060
Torsion
Figure 4.13. Hull displacements at the hull reference point during torsional and horizontal push-
overs.
a) b)

Chapter 4
4.34
The spudcan reactions, which are shown in Figure 4.14, reveal that under pure torsion
all three spudcans track along the same load path (if the horizontal and moment
components are combined into one resultant reaction, respectively). Although only
vertical load and torsion are applied at the jack-up’s hull, the footings are subjected to
loading in all six degrees-of-freedom.
The ISIS footing model features a radial hardening law, which implies that expansion of
the yield surface is not only a function of the plastic component of the vertical
displacement but a function of all six degrees-of-freedom. Therefore, the fact that the
applied torsion does not produce an overturning mechanism and therefore no significant
change in vertical displacement does not imply the yield surface to remain the same size
throughout the simulation as would be the case with a purely vertical hardening law.
The increase in vertical plastic displacement is due to the link between all six degrees-
of-freedom in the flow rule and the hardening law. Since all three spudcans experience
the same vertical displacement, the footings settle equally (albeit by only 14 mm) and
the jack-up penetrates into the ground as a rigid body.
The magnitude of horizontal and moment load induced onto the spudcans through the
torsional loading at the hull is of the same order of magnitude as the reactions in
horizontal push-overs. However, the response in horizontal-moment space during yield
is less non-linear. At failure, the footings still carry more than half the moment load
they were subjected to at yield. In contrast to the horizontal-moment plane, the footing
load paths in the torsional planes differ significantly between the horizontal and
torsional push-overs. Although the applied torsion is resisted to a larger degree by
horizontal and moment reactions than torsion, the torsional footing loads are orders or

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.35
magnitude greater if the jack-up is twisted directly rather than pushed over skew. This is
illustrated in Figure 4.14.
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
0.00 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08M/2RV0 [-]
H/V
0 [-]
30 S1
0 S130 S2
30 S3
60 S1, S2
Torsion S1, S2, S3
60 S3
0 S2, S3
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
0.000 0.005 0.010 0.015 0.020 0.025Q/2RV0 [-]
H/V
0 [-]
30 S1
60 S1, S2
30 S230 S3
60 S3Torsion S1, S2, S3
0 S1
0 S2, S3
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.000 0.005 0.010 0.015 0.020 0.025Q/2RV0 [-]
M/2
RV 0
[-]
30 S1
60 S1, S2, S3
30 S2
30 S3
Torsion S1, S2, S3
0 S1, S2, S3
Figure 4.14. Spudcan reactions during torsional and horizontal push-overs.
During yield, the envelope of the combined load capacity intersects the vertical axis at a
load only about 3.5% higher than the preload (compared to 32% for spudcan 3 in the
‘two legs windward, one leg leeward’ orientation of the horizontal push-overs) and as
0/VV remains at 0.5 until failure, the additional available load capacity is not very
large. Furthermore, all three footings are equally loaded and therefore cannot
compensate for any loss of capacity on any one footing. All spudcans and therefore the
system fail simultaneously, predominantly in torsion.
Note that the horizontal and rotational spudcan displacements are equal in resultant
magnitude only, not in direction. The translatory (and rotational) displacement of each
a) b)
c)

Chapter 4
4.36
of the footings cancel out in the system such that the jack-up itself does not experience
any translation (or rotation).
4.3.2.3 Summary
The above analyses make it clear that since any loading situation other than purely
horizontal load along the jack-up’s axis of symmetry is resisted by spudcan reactions in
all six degrees-of-freedom, it is crucial for the modelling of the overall system response
to predict the combined load-displacement behaviour of the footings accurately. Not
only does this include understanding of the size of the yield surface and the amount of
its expansion, but also the footing load path in combined load-displacement space. This
has particular application to systems where the individual footings are assumed to act
independently, but are linked by the structure. Two footings under the same deviator but
different vertical loads, for instance, will trace very different load paths and therefore
show different failure mechanisms and capacities. Torsional load on the structure is
resisted, to a large degree, by horizontal and moment response at the footing level. This
leaves significantly less capacity for any horizontal and/or moment loading (and vice
versa). For an accurate assessment it is therefore important not to oversimplify the
loading conditions and take into account any non-symmetric load acting on the rig. This
is only possible in 3D modelling. Further, the above discussion has highlighted that it is
paramount for the prediction of jack-up behaviour to employ a sophisticated model to
simulate the footing load paths. Since it is inappropriate to analyse the spudcan response
separately due to system behaviour, the footing model is required to be incorporated
into a numerical program together with the structural and environmental loading
models.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.37
4.3.3 Dynamic analyses with wind, wave and current loading
Complementing the previous quasistatic push-over analyses, this section discusses a
pair of dynamic numerical simulations subjecting the model jack-up to wind, wave and
current loading. As before, the rig is numerically ‘installed’ by preloading the spudcans
(with the preload on the three footings combined corresponding to twice the rig’s self-
weight) after which the vertical load is reduced to the jack-up’s self-weight.
From the initially calm conditions, wind, waves and current build up. The maximum
loading is applied on the jack-up as the largest wave crest travels past the legs. At this
time, the wind loading has reached 1.35 MN. It is simplified here to point loading on the
leg-hull connections (i.e. 0.45 MN on each corner of the hull) acting along the rig’s axis
of symmetry such that two legs are leeward. Wave loading is modelled by the
NewWave theory. The NewWave used in these analyses has an amplitude of 15 m, a
large wave within a storm represented by the Pierson-Moskowitz spectrum with a
significant wave height ( sH ) of 12 m and a mean-crossing period ( zT ) of 10.6 s. Delta
stretching was used to evaluate the kinematics close to the crest. The fluid drag and
inertia coefficients dC and mC are 1.1 and 2.0, respectively.
Two wave loading directions are analysed: α = 25° and 60° (with the wind loading
acting along the jack-up’s axis of symmetry in both cases). Although a change in wave
loading direction would vary the fluid drag and inertia coefficients on a typical
trusswork jack-up leg, for simplicity in these analyses dC and mC are held constant (as
are the hydrodynamic diameter and area). This helps to visualise the effect the same
wave loading has on the jack-up when the rig’s orientation is changed. The NewWave
crest is focused at the centre of gravity of the jack-up (hull reference point on

Chapter 4
4.38
Figure 4.4b) at a simulation time of 100 s. The current superimposed onto the wave
loading is assigned a constant velocity of 0.2 m/s and acts in the direction of the wave.
Structural damping has been set at 5% of critical for the lowest two modes.
Hydrodynamic damping is calculated using the extended Morison equation.
The crests and troughs of the NewWave pass each of the three legs at different times if
the rig is oriented at 25° to the waves. For α = 60°, however, legs 1 and 2 are hit
simultaneously by the wave due to symmetry. This is shown in Figure 4.15. It can also
be seen that due to spatial dispersion the wave amplitude differs on the individual legs,
reaching the full 15 m amplitude only on leg 1 (α = 25°) during the NewWave crest.
This implies different loading conditions on the jack-up legs, not only with time but also
for each of the legs at any given time.
85.0
90.0
95.0
100.0
105.0
110.0
115.0
0 20 40 60 80 100 120 140 160 180 200Time [s]
Free
wat
er s
urfa
ce [m
]
25: Leg 125: Leg 225: Leg 3
85.0
90.0
95.0
100.0
105.0
110.0
115.0
0 20 40 60 80 100 120 140 160 180 200Time [s]
Free
wat
er s
urfa
ce [m
]
60: Leg 160: Leg 260: Leg 3
Figure 4.15. Free water surface elevation on the jack-up legs with time: a) α = 25°, b) α = 60°.
The movement of the hull during the dynamic analysis is illustrated in Figure 4.16 in
terms of the resultant horizontal hull displacements. For both loading directions, the
displacement amplitudes increase with the waves. However, in the case of α = 25° the
displacements are significantly larger than for α = 60°. Furthermore, when the jack-up is
loaded asymmetrically, the effect of the wave loading passing the three legs at different
times excites the torsional mode. This is reflected in the torsional hull displacement as
a) b)

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.39
the jack-up is positively rotated around the vertical axis during wave crests and
negatively during troughs (with a natural period of around 5.4 s).
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
0 20 40 60 80 100 120 140 160 180 200Time [s]
Hor
izon
tal h
ull d
ispl
acem
ent [
m]
alpha = 25 degrees
alpha = 60 degrees
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
0.020
0 20 40 60 80 100 120 140 160 180 200Time [s]
Hul
l tor
sion
[rad
]
alpha = 25 degrees
alpha = 60 degrees
Figure 4.16. Hull displacements at hull reference point during dynamic storm analysis.
The response following the largest wave shows the natural frequency and damping of
the jack-up and soil system. In calm conditions after preload, the natural period of the
example jack-up in the surge and sway modes was 8.0 s. (These are equal as expected
since the leg stiffness is the same about orthogonal axes and the leg centres are arranged
on an equilateral plan.) However, as the NewWave passes, the yielding of the footings
and its accompanying reduction of footing stiffness causes an elongation of the jack-
up’s natural periods. The different amount of yield for the two loading conditions
considered here is visible both in the periods of hull sway and the magnitude of
permanent displacement after the wave has passed. (Note that with the time scale
selected for Figure 4.16, about 0.1 m of the horizontal hull displacement is due to wind
and current still acting on the system.) Footing yield and therefore permanent
displacements could not be predicted using more simplifying footing assumptions,
which highlights the benefits of the ISIS plasticity model.
These analyses highlight that even though the example jack-up’s least critical loading
direction defined by footing failure in horizontal push-over analyses was evaluated to be
symmetrical (α = 60° or ‘two legs windward, one leg leeward’), displacements may be
a) b)

Chapter 4
4.40
larger in other orientations. Therefore, assuming symmetrical conditions (enabling plane
frame analysis in two dimensions) to be always critical may prove unconservative.
Further, the jack-up’s system response may not be predicted correctly if the footing
behaviour is over-simplified. Modelling the footing load-displacement paths accurately
is crucial to the overall behaviour of the rig, especially with respect to permanent
displacements - and ultimately - failure of the spudcans. Performing dynamic analyses
rather than using dynamic amplification factors in quasistatic analyses ensures that
inertia effects are accounted for properly. The footings of the same system in an
amplified quasistatic analysis may track entirely different load paths yielding a different
response of the jack-up.
4.4 CONCLUSIONS
In this paper, the computer program SOS_3D has been introduced. It provides an
integrated and balanced approach to fluid-structure-soil analysis of offshore systems in
three dimensions. Although employed for jack-up analyses here, the program may also
be used to simulate other structures composed of beam-columns and shallow
foundations, for instance offshore wind turbines.
The program has been employed to investigate jack-up behaviour in three dimensions.
Push-over and storm loading analyses have been discussed, both for symmetric and
asymmetric load cases. The asymmetric loading cases have revealed some interesting
aspects of jack-up behaviour under general combined loading, which before could only
be modelled using simplified footing assumptions. Comparison between the symmetric
and asymmetric orientation highlights how the system’s response changes with loading
direction and stresses the importance of 3D dynamic analysis since, for instance, storm
loading in the field might not act along the jack-up’s axis of symmetry. Furthermore,

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.41
these example analyses underline the requirement of accurate foundation modelling as
the footing response significantly influences the system behaviour.
4.5 REFERENCES
Bienen, B., Byrne, B.W. & Houlsby, G.T. (2005). Six degree-of-freedom loading of a circular flat footing on loose sand: Experimental data. Report No OUEL 2289/05, Department of Engineering Science, University of Oxford.
Bienen, B., Byrne, B.W., Houlsby, G.T. & Cassidy MJ. (2006). Investigating six degree-of-freedom loading of shallow foundations on sand. Géotechnique, Vol. 56, No. 6, pp. 367-379.
Boccotti, P. (1983). Some new results on statistical properties of wind waves. Applied Ocean Research, Vol. 5, pp. 134-140.
Brekke, J.N., Murff, J.D., Campbell, R.B. & Lamb, W.C. (1989). Calibration of jackup leg foundation model using full-scale structural measurements. Offshore Technology Conference (OTC), Houston, Texas, OTC 6127.
Brekke, J.N., Campbell, R.B., Lamb, W.C. & Murff, J.D. (1990). Calibration of jackup structural analysis procedure using field measurements from a North Sea jack up. Offshore Technology Conference (OTC), Houston, Texas, OTC 6465.
Byrne, B.W. & Houlsby, G.T. (2001). Observations of footing behaviour on loose carbonate sands. Géotechnique, Vol. 51, No. 5, pp. 463-466.
Cassidy, M.J. (1999). Non-linear analysis of jack-up structures subjected to random waves. DPhil thesis, University of Oxford.
Cassidy, M.J. & Bienen, B. (2002). Three-dimensional numerical analysis of jack-up structures on sand. Proc. 12th International Offshore and Polar Engineering Conference, Kitakyushu, Japan.
Cassidy, M.J., Byrne, B.W. & Houlsby, G.T. (2002a). Modelling the behaviour of circular footings under combined loading on loose carbonate sand. Géotechnique, Vol. 52, No. 10, pp. 705-712.
Cassidy, M.J. & Cheong, J. (2005). The behaviour of circular footings on sand subjected to combined vertical-torsion loading. International Journal of Physical Modelling in Geotechnics, Vol. 5, No. 4, pp. 1-14.
Cassidy, M.J. & Houlsby, G.T. (2002). Vertical bearing capacity factors for conical footings on sand. Géotechnique, Vol. 52, No. 9, pp. 687-692.
Cassidy, M.J., Houlsby, G.T., Hoyle, M. & Marcom, M. (2002b). Determining appropriate stiffness levels for spudcan foundations using jack-up case records. Proc. 21st International Conference on Offshore Mechanics and Artic Engineering (OMAE), Oslo, Norway, OMAE2002-28085.
Cassidy, M.J., Martin, C.M. & Houlsby, G.T. (2004). Development and application of force resultant models describing jack-up foundation behaviour. Marine Structures, Vol. 17, pp. 165-193.
Chen, W.F. & Lui, E.M. (1991). Stability design of steel frames. CRC Press, Inc.
Clough, R.W. & Penzien, J. (1993). Dynamics of structures. McGraw-Hill, New York.
Doherty, J.P. & Deeks, A.J. (2003). Elastic response of circular footings embedded in a non-homogeneous half-space. Géotechnique, Vol. 53, No. 8, pp. 703-714.

Chapter 4
4.42
Gottardi, G., Houlsby, G.T. & Butterfield, R. (1999). Plastic response of circular footings on sand under general planar loading. Géotechnique, Vol. 49, No. 4, pp. 453-469.
Houlsby, G.T. (2003). Modelling of shallow foundations for offshore structures. Proc. International Conference on Foundations, Dundee, Scotland.
Houlsby, G.T. & Cassidy, M.J. (2002). A plasticity model for the behaviour of footings on sand under combined loading. Géotechnique, Vol. 52, No. 2, pp. 117-129.
Hunt, R.J. & Marsh, P.D. (2004). Opportunities to improve the operational and technical management of jack-up deployments. Marine Structures, Vol. 17, No. 3–4, pp. 261–73.
Kassimali, A. (1983). Large deformation analysis of elasto-plastic frames. Journal of Structural Engineering, ASCE, Vol. 109, No. 8, pp. 1869-1886.
Kassimali, A., Abbasnia, R. (1991). Large deformation analysis of elastic space frames. Journal of Structural Engineering, ASCE, Vol. 117, No. 7, pp. 2069-2087.
Lindgren, G. (1970). Some properties of a normal process near a local maximum. Annals of Mathematical Statistics, Vol. 41, pp. 1870-1883.
Lu, Y., Chen, Y., Tan, P. & Bai, Y. (2001). Prediction of jack-up dynamic response. Proc. 20th International Conference on Offshore Mechanics and Artic Engineering (OMAE), Rio de Janeiro, Brazil.
Martin, C.M. (1994). Physical and numerical modelling of offshore foundations under combined loads. DPhil thesis, University of Oxford.
Martin, C.M. & Houlsby, G.T. (1999). Jackup units on clay: structural analysis with realistic modelling of spudcan behaviour. Offshore Technology Conference (OTC), Houston, Texas, OTC 10996.
Martin, C.M. & Houlsby, G.T. (2001). Combined loading of spudcan foundations on clay: numerical modelling. Géotechnique, Vol. 51, No. 8, pp. 687-699.
Meyer, V.M., Hoyle, M.J.R. & Williams, J. (2004). The ability of site assessment foundation checks to safeguard against abnormal environmental events. Marine Structures, Vol. 17, pp. 195-217.
Morandi, A., Karunakaran, D., Dixon, A. & Baerheim, M. (1998). Comparison of full-scale measurements and time-domain irregular sea analysis for a large deepwater jack-up. Offshore Technology Conference (OTC), Houston, Texas, OTC 8828.
Nelson, K., Smith, P., Hoyle, M., Stoner, R. & Versavel, T. (2000). Jack-up response measurements and the underprediction of spud-can fixity by SNAME 5-5A. Offshore Technology Conference (OTC), Houston, Texas, OTC 12074.
Oran, C. (1973a). Tangent stiffness in plane frames. Journal of the Structural Division, ASCE, Vol. 99, No. 6, pp. 973-985.
Oran, C. (1973b). Tangent stiffness in space frames. Journal of the Structural Division, ASCE, Vol. 99, No. 6, pp. 987-1001.
Przemieniecki, J.S. (1968). Theory of matrix structural analysis. McGraw-Hill, New York.
Rodenbusch, G. & Forristall, G.Z. (1986). An empirical model for random directional wave kinematics near the free surface. Offshore Technology Conference (OTC), Houston, Texas, OTC 5097.
SNAME (Society of Naval Architects and Marine Engineers) (2002). Site specific assessment of mobile jack-up units. SNAME Technical and Research Bulletin 5-5A, 1st Ed., 2nd Revision.

Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures
4.43
Stock, D.J., Lewis, D.R., Baucke, T.C. & Hsu, H.Y. (2000). Hurricane Georges hindcast assessment of LeTourneau 116-C and 82-SD-C jackups. Offshore Technology Conference (OTC), Houston, Texas, OTC 12075.
Thompson, R.S.G. (1996). Development of non-linear numerical models appropriate for the analysis of jackup units. DPhil thesis, University of Oxford.
Timoshenko, S.P. & Gere, J.M. (1961). Theory of elastic stability. McGraw-Hill, New York.
Tromans, P.S., Anaturk, A.R. & Hagemeijer, P. (1991). A new model for the kinematics of large ocean waves - applications as a design wave. Proc. 1st International Offshore and Polar Engineering Conference, Edinburgh, UK, pp. 64-71.
Wheeler, J.D. (1970). Method for calculating forces produced by irregular waves. Journal of Petroleum Technology, pp. 359-367.
Williams, M.S., Thompson, R.S.G. & Houlsby, G.T. (1998). Non-linear dynamic analysis of offshore jack-up units. Computers and Structures, Vol. 69, pp. 171-180.

Chapter 4
4.44

CHAPTER 5
5.1
CENTRIFUGE TESTS OF SHALLOW FOOTING BEHAVIOUR ON SAND UNDER COMBINED VERTICAL-
TORSIONAL LOADING
ABSTRACT
Extensive laboratory model tests at earth’s gravity (1g) have been performed during the
last two decades to investigate the behaviour of shallow foundations under combined
loading. These results have been extremely useful to understand the mechanisms taking
place and to design a framework to predict the response of foundations under such
loading conditions. The potential scale effects associated with the 1g conditions and the
extrapolation of the small model results to large prototype foundations, particularly for
testing in sand, however, have only been partially investigated. This paper describes a
series of 1g tests and centrifuge tests performed on shallow circular foundations on sand
subjected to combined vertical and torsional loading. The results are discussed within
the framework of displacement-hardening elastic-plastic macroelement modelling, with
emphasis on the difference between the 1g results and the centrifuge results and its
consequences for the performance of the framework.

Chapter 5
5.2
5.1. INTRODUCTION
Combined loading on shallow foundations is an important aspect of geotechnical
engineering. Although vertical loading dominates especially in the case of many
onshore constructions, horizontal, moment and torsional loads can be substantial. This
is certainly true for offshore applications such as mobile jack-up drilling rigs or wind
turbines. Horizontal loads on the footings are caused by wind, waves and currents and
the significant height of the structure also induces large overturning moments. Further,
environmental loadings are unlikely to be co-planar and transverse loading introduces
torsion to multi-footing systems. The response of these shallow foundations therefore
has six degrees-of-freedom.
Following the proposition by Butterfield & Ticof (1979) of utilising ’interaction
diagrams’, a number of models allowing prediction of shallow footing load-
displacement response on both sand and clay have been formulated within the
framework of displacement-hardening plasticity (a sub-set of these include Nova &
Montrasio 1991; Gottardi et al. 1999; Martin & Houlsby 2000, 2001; Byrne & Houlsby
2001; Cassidy et al. 2002a; Houlsby & Cassidy 2002; Bienen et al. 2006). These
models consist of a yield surface (written directly as a function of the combined loads)
which expands according to a hardening law, a description of elastic behaviour within
the yield surface and a flow rule to describe the behaviour at yield. This framework has
the advantage that models can be directly implemented into finite element programs to
integrate the footing-soil response with the structural response. Notable examples of this
have been in predicting the response of entire jack-up platform systems under
environmental loading (Thompson 1996; Williams et al. 1998 and Cassidy et al. 2002b

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.3
for two-dimensional simulation and Cassidy & Bienen 2002; Bienen & Cassidy 2006
for three-dimensional simulation).
Most of the components of these macroelement plasticity models have been explored
using 1g (small stress) experimental results in which the soil stress field is dissimilar to
the prototype (Ovesen 1979). Although the models have been successfully used for
simulations, some adjustment may be required to account for the higher stress level
experienced by in-situ ‘prototype’ footings. For example, the spudcans of jack-up
platforms can be up to 20 m in diameter with vertical load on each of the spudcan
footings due to self-weight of the rig of the order of 50-100 MN and higher during the
preloading process.
This paper addresses the applicability of the plasticity models introduced by Houlsby &
Cassidy (2002), Cassidy et al. (2002a) and Bienen et al. (2006) to single footing tests
performed in the centrifuge. Previously these models were calibrated using 1g
experimental results of 100 to 150 mm diameter footings on sand (Gottardi et al. 1999;
Byrne & Houlsby 2001; Bienen et al. 2006). With the geotechnical centrifuge testing
technique, self-weight stresses are correctly reproduced and observations from small
scale models can be related to the full scale prototype situation through well established
scaling laws (Taylor 1995). Although some centrifuge testing of circular shallow
footings on sand has been undertaken by Tan (1990) and Cassidy (2007) to investigate
the shape and size of the yield surface for true scale conditions in vertical-horizontal-
moment space, further investigation is required. No centrifuge testing has been
performed to investigate the displacement-hardening elastic-plastic framework in load
planes involving torsion. The centrifuge experiments discussed here were performed in
the vertical-torsional plane on dry silica sand. The behaviour is discussed in terms of

Chapter 5
5.4
vertical (V ) and torsional (Q ) loads, and vertical displacement ( w ) as well as twist
(ω ).
5.2. FOOTING MODEL FORMULATION FOR THE VERTICAL-TORSIONAL PLANE
The displacement-hardening elastic-plastic model formulation considered here is fully
set out by Bienen et al. (2006), who describe the load-displacement behaviour of
circular footings on sand for all six degrees-of-freedom. A brief description of the
elements of the model relevant to the vertical-torsional plane only is given here. As an
elastic-plastic model it requires the usual elements: a description of elastic response; a
yield surface separating elastic and plastic states; a hardening law linking change in size
of the yield surface with plastic deformation; and a flow rule describing the nature of
the plastic deformation that occurs when the yield surface is reached.
5.2.1. Yield surface
In the vertical-torsional plane, the yield surface (Figure 5.1) formulates the interaction
between vertical and torsional loading as
( )( )012/ 21
21
212
0
2
0
2
21
21
2
00
=⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ +−⎟⎟
⎠
⎞⎜⎜⎝
⎛=
+ ββ
ββ
ββ
ββββ
VV
VV
VqRQf (5.1)
with 0q denoting the maximum normalised torsion, R the radius of the footing and 0V
the purely vertical capacity associated with the current yield surface. 1β and 2β are
curvature parameters. Experimental evidence obtained from small scale 1g tests on
rough flat circular footings suggests values of 0q up to 038.0 on loose silica sand
(Byrne & Houlsby 2005) but as low as 0234.0 on dense silica sand at low vertical
preload (Cheong 2002).

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.5
-0.06
-0.04
-0.02
0.00
0.02
0.04
0.06
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
V/V0 [-]
Q/2
RV 0
[-]
Frictional sliding line q0 = 0.038, β1 = 0.45, β2 = 0.55
q0 = 0.038, β1 = 0.76, β2 = 0.76
q0 = 0.0234, β1 = 0.45, β2 = 0.55
q0 = 0.0234, β1 = 0.76, β2 = 0.76
Figure 5.1. Yield surface for vertical-torsional load.
Considering the vertical-torsional plane alone, the best fit curvature parameters to the
experimental data are 45.01 =β and 55.02 =β (Cheong 2002; Cassidy & Cheong
2005), while values of 67.01 =β and 69.02 =β (Byrne & Houlsby 2005) and
76.021 == ββ (Bienen et al. 2006) were recommended to fit all six degrees-of-
freedom. Figure 5.1 illustrates the effects of a variation in 0q and the shaping
parameters 1β and 2β while Table 5.1 summarises the yield surface parameters derived
from previous experiments.
Reference Sand density )2
max(0
0 RVQq =
Cheong (2002), Cassidy & Cheong (2005)
Loose,
very dense
029.00 =q
)ln36.01(0
000
peakpeak V
Vqq −=
0234.00 =peakq
Byrne & Houlsby (2005) Loose 0.038
Bienen et al. (2006) Loose 0.033
Table 5.1. Yield surface parameters for circular footings derived from previous small scale
experiments at 1g.

Chapter 5
5.6
For values of 1.0/0 0 ≤≤ VV Cheong (2002) observed in small scale 1g tests the
mechanism to change to frictional sliding and hence suggested the yield surface to be
limited by a frictional sliding line given by
0tan412/
=−= φV
RQf (5.2)
where cvφφ = .
5.2.2. Elastic behaviour
Inside the yield surface, the load-displacement relation is elastic, with loads and
displacement increments related by:
⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡=⎟⎟
⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡=⎟⎟
⎠
⎞⎜⎜⎝
⎛e
e
q
ve
e
q
v
Rddw
kk
GRRddw
KK
RdQdV
ωω 200
220
02/ (5.3)
where G is a representative shear modulus (Cassidy et al. 2004). Elasticity coefficients
have been difficult to derive through experimental means and therefore the non-
dimensional elasticity coefficients vk and qk have been established numerically using
the finite element method (Doherty & Deeks 2003).
5.2.3. Hardening law
The evolution in size ( 0V ) of the yield surface is linked to the vertical load-plastic
displacement response. In loose silica sand Bienen et al. (2006) used the expression
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+=
2
110
1
1
ww
ww
wkVp
p
p (5.4)
to describe hardening. This formulation, however, represents a purely empirical fit to
the experimental data. None of the parameters 1k , 1w and 2w is dimensionless. A

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.7
similar expression, relating 0V to the plastic components of deformation in all six
degrees-of-freedom rather than the vertical plastic displacement alone, was suggested to
account for proportional hardening (or ‘radial hardening’ as referred to in some of the
previous literature) (Bienen et al. 2006).
For dense sands, Cassidy & Houlsby (1999) developed a hardening law linking the
plastic vertical displacement to the γN term of the traditional bearing capacity theory
modified by a dimensionless empirical factor with parameters values chosen to fit small
scale model tests.
It is important to note that these hardening laws have been fitted to data from small
scale model experiments at 1g, and their relevance for large footings under high stresses
has not been proven. As vertical bearing capacity of circular shallow foundations on
sand is an area of much interest to geotechnical engineers, it has received considerable
research attention (with recent publications including Perkins & Mason 2000; Zhu et al.
2001). However, a general formulation of (vertical) plastic displacement with vertical
load applicable to a wide range of footings sizes and stresses has not been established
yet.
5.2.4. Flow rule
The flow rule of the model in the vertical-torsional plane is given by
( )( )0
'1
''2/ 43
43
432
0
2
0
2
43
43
2
00
=⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ +−⎟
⎟⎠
⎞⎜⎜⎝
⎛=
+ ββ
ββ
ββ
ββββ
α VV
VV
VqRQg
q (5.5)
where qα adjusts the size and 3β and 4β the shape of the plastic potential when
compared with the yield surface. Note that associated behaviour is predicted for
0.1=qα , 13 ββ = and 24 ββ = , and non-associated for any other parameter values. The

Chapter 5
5.8
degree of non-association is most influenced by large changes in qα . 0V ′ is a dummy
parameter indicating the abscissa value on the vertical load axis such that the
intersection of the plastic potential with the yield surface coincides with the current load
point.
5.3. EXPERIMENTAL APPARATUS
The UWA geotechnical beam centrifuge (Randolph et al. 1991) was used to conduct the
single footing tests in the vertical-torsional plane. All centrifuge experiments were
performed at 200g.
The testing programme focussed on torsional behaviour as the least experimental data is
available for this area. An experimental apparatus already developed at UWA was
utilised. It allows independent control of the vertical and torsional loading directions.
This was deemed important as simultaneous influence of several loading directions
makes analysis and understanding of the results very difficult.
The loading arm (Figure 5.2) was originally designed by Cassidy & Cheong (2005) to
investigate shallow footing behaviour under planar vertical-horizontal-moment (VHM )
loading combined with torsion. The apparatus consists of two concentric shafts with the
outer shaft rigidly connected to a torsion actuator which was originally developed for
shear vane testing in the UWA beam centrifuge (Elkhatib 1997; Watson 1999). This
assembly is mounted on another actuator which allows for vertical as well as horizontal
movement. However, as the experiments here investigated vertical-torsional load
combinations only, the horizontal displacement option was not utilised and the outer
shaft was not strictly necessary for the set-up.

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.9
Torsional actuator Flat footing
Spudcan footing
Outer loading arm Inner loading arm with axial and torsional strain gauges
Torsional actuator
Footing Loading arm
Vertical actuator
Sand sample
Beam centrifuge
Figure 5.2. Experimental apparatus, a) loading arm, b) centrifuge set-up.
a)
b)

Chapter 5
5.10
The inner shaft, which is independently strain gauged for axial and torsional loads,
connects to the torsion actuator with grub screws, rotating inside the rigid shaft on a
frictionless bearing. Further details of the strain gauging are provided in Cheong (2002).
The footing was attached to the bottom of the inner shaft through grub screws.
Flat circular footings of 60 mm and 100 mm diameter, respectively, were used for the
majority of the experiments with a few tests carried out on a 50 mm diameter spudcan
footing. The base of the flat footings was roughened by gluing sand onto it whereas the
spudcan was left smooth (with δ of around 0.2 as evaluated by direct shear tests
performed at UWA).
5.4. SOIL CHARACTERISTICS AND SAMPLE PREPARATION
The tests were carried out on a commercially available superfine silica sand. It is
characterised by 50d = 0.190 mm and a critical state friction angle cvφ = 34.9°. The
maximum and minimum dry unit weights are 14.87 kN/m3 and 17.94 kN/m3,
respectively (Cheong 2002).
Samples were prepared dry at two different relative densities, calculated by weighing
the overall volume of sand. A medium density of %45≈rD was achieved by carefully
pouring the sand into the strongbox by hand. Dry pluviation was used to create samples
with relative densities of %100≈rD .
5.5. EXPERIMENTAL PROGRAMME
The testing programme aimed primarily at improving the understanding, under true
scale conditions, of
• the yield surface size and shape in vertical–torsion load space,

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.11
• surface expansion and flow behaviour during hardening (including the question
of proportional hardening),
• the influence of relative sand density on shallow foundation behaviour.
The experimental series included the following types of tests:
• Vertical load-penetration tests. These tests were performed displacement-
controlled to the full capacity of the loading arm to provide as much data as
possible about the vertical hardening.
• Swipe tests. These tests involved vertical preload to a target penetration
followed by twist at no additional vertical displacement. The resulting curve is a
trace of the yield surface once the experimental results are corrected for soil
elasticity and rig stiffness (as described in Gottardi et al. 1999). (These
corrections are negligible if the soil and rig stiffnesses are very high.) Here, the
swipe tests were performed from different vertical preload levels 0V . These
commenced in the range of 5.34.0 <<Rγσ , where σ is the vertical stress
applied on the foundation ( 20
RVπ
σ = ), R the radius of the foundation and γ the
dry unit weight of the sand. Although these were not as large as jack-up
prototype stresses during the preload phase ( 5.4≈Rγσ , assuming a preload of
140 MN, 20 m diameter footings and an effective soil unit weight of 10 kN/m3),
they are associated with the maximum achievable torsion using this testing
apparatus.

Chapter 5
5.12
• Constant vertical load tests. As a dual to the swipe tests these were first
displaced to a target preload, but were then twisted under constant vertical load
rather than constant vertical displacement. The twisting event provides
information about the flow behaviour as the combined load cannot be
accommodated within the initial yield surface corresponding to pure vertical
loading.
• Proportional displacement tests (also called ‘radial displacement tests’ in some
of the previous literature). The footing was driven displacement-controlled into
the soil under a constant ratio of vertical displacement and twist (Figure 5.3), i.e.
the footing penetrated into the soil in a ‘corkscrew’ motion. Each proportional
displacement test only provides information on one incremental plastic
displacement direction rather than sweeping a continuous curve of changing
ratios like the constant vertical load tests. Vertical load-displacement tests can be
regarded as a sub-set of proportional displacement tests.
w
2Rω
2Rdω/dw = 1.0
2Rdω/dw < 1.0
2Rdω/dw > 1.0
2Rdω/dwincreasing
Figure 5.3. Imposed displacement directions in proportional displacement tests in the vertical-
torsional plane (schematic).
The testing programme is summarised in Table 5.2. All centrifuge tests were performed
at 200g with some additional tests carried out at 1g for comparison.

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.13
Test Relative Gravity Footing Preloading PrototypeEvent type no. density level diameter level V0 [N] V0 [MN] σ/(γ*R) Figure(s)Vertical load 1 medium dense 200 100 - - 4.50 4, 7, 8-displacement 2 medium dense 200 100 - - 4.34 4, 7, 8
3 medium dense 200 100 - - 0.23 4, 7, 84 medium dense 200 100 - - 2.75 4, 7, 85 medium dense 200 100 - - 2.76 4, 7, 86 medium dense 200 100 - - 1.97 4, 7, 89 medium dense 200 60 - - 3.51 4, 7, 8, 18, 19
14 medium dense 200 60 - - 1.04 4, 7, 823 medium dense 200 60 - - 19.78 4, 7, 8, 18, 1937 medium dense 200 60 - - 1.66 4, 7, 8, 18, 1943 medium dense 200 100 - - 4.56 4, 7, 811 medium dense 1 60 - - 38.88 4, 8, 1915 medium dense 1 60 - - 28.32 4, 8, 197 very dense 200 100 - - 1.85 5, 6, 9, 17
16 very dense 200 60 - - 3.29 5, 6, 918 very dense 200 60 - - 3.32 5, 6, 921 very dense 200 60 - - 17.40 5, 6, 9, 16, 1744 very dense 200 100 - - 4.06 5, 6, 9, 178 very dense 1 100 - - 176.83 5, 9
17 very dense 1 60 - - 162.80 5, 920 very dense 1 60 - - 113.80 5, 922 very dense 1 60 - - 270.98 5, 9
Swipe 9 medium dense 200 60 348.5 13.9 1.27 10-139 medium dense 200 60 541.8 21.7 1.98 10-139 medium dense 200 60 718.9 28.8 2.63 10-13
14 medium dense 200 60 292.6 11.7 1.08 10-1326 medium dense 200 60 521.1 20.8 1.87 10, 12-1327 medium dense 200 60 298.0 11.9 1.07 10, 12-1327 medium dense 200 60 725.0 29.0 2.60 10-1331 medium dense 200 60 110.8 4.4 0.41 10-1332 medium dense 200 60 185.0 7.4 0.69 10-1334 medium dense 200 60 300.0 12.0 1.08 10-1336 medium dense 200 60 297.4 11.9 1.08 10-1338 medium dense 200 50 * 288.6 11.5 1.80 12-1318 very dense 200 60 413.3 16.5 1.35 10, 1324 very dense 200 60 410.6 16.4 1.34 10, 1325 very dense 200 60 341.1 13.6 1.11 10, 1325 very dense 200 60 731.8 29.3 2.39 10, 1328 very dense 200 60 530.9 21.2 1.75 10, 1329 very dense 200 60 529.5 21.2 1.75 10, 1330 very dense 200 60 114.4 4.6 0.38 10, 1340 very dense 200 60 135.6 5.4 0.45 10, 13
ConstantV 9 medium dense 200 60 959.8 38.4 3.51 14, 15, 1810 medium dense 200 60 1006.7 40.3 3.65 14, 1513 medium dense 200 60 504.0 20.2 1.85 14, 15, 1814 medium dense 200 60 1481.1 59.2 5.42 14, 1531 medium dense 200 60 218.9 8.8 0.81 14, 1533 medium dense 200 60 74.2 3.0 0.27 14, 15, 1833 medium dense 200 60 203.3 8.1 0.74 14, 15, 1835 medium dense 200 60 102.1 4.1 0.37 14, 15, 1838 medium dense 200 50 * 255.4 10.2 1.59 1439 medium dense 200 50 * 501.8 20.1 3.12 1411 medium dense 1 60 69.0 - 50.62 14, 17, 1916 very dense 200 60 1001.1 40.0 3.28 14, 15, 16, 1718 very dense 200 60 1011.2 40.4 3.31 14, 15, 16, 1719 very dense 200 60 516.5 20.7 1.69 14, 15, 16, 1728 very dense 200 60 895.5 35.8 2.96 -30 very dense 200 60 171.1 6.8 0.57 14, 15, 16, 1741 very dense 200 60 116.4 4.7 0.38 14, 15, 16, 1742 very dense 200 60 77.2 3.1 0.25 14, 15, 16, 1717 very dense 1 60 83.4 - 54.66 14, 1720 very dense 1 60 175.1 - 114.53 14, 1720 very dense 1 60 177.5 - 116.09 14, 17
Proportional 12 (1) medium dense 200 60 - - 4.43 15, 18displacement ** 19 (2) medium dense 200 60 - - 5.26 15, 18
19 (1) very dense 200 60 - - 4.12 15
Note: σ/(γ*R) applies at the maximum vertical load in the vertical load-displacement and the swipe events, and at the vertical load held during the constantV events.
* smooth spudcan** Imposed control 2Rdω/dw = 4.0 (1); 0.5 (2)
(Plus 2 (1) swipe, 2 (1) constantV and 3 (0) radial displacement events on medium dense (very dense) sand at 200g not in the Figures)
Total number of events = 75
Table 5.2. Testing programme.

Chapter 5
5.14
5.6. RESULTS AND DISCUSSION
5.6.1. Cone penetrometer tests (CPT)
Figure 5.4 shows the results of cone penetrometer tests. The results are normalised by
the cone diameter coned = 7 mm. One test per sand sample was carried out in order to
assess its uniformity with depth as well as comparability between samples. Results in
the medium dense sand samples are very consistent while results in the very dense
sample exhibit a limited amount of scatter.
0.0
5.0
10.0
15.0
20.0
25.0
0.0 50.0 100.0 150.0 200.0 250.0 300.0
Normalised cone tip resistance (qc-σv)/σv [-]
Nor
mal
ised
pen
etra
tion
w/d
cone
[-]
0.0
100.0
200.0
300.0
400.0
500.0
Vert
ical
effe
ctiv
e st
ress
σ' v
[kPa
]
Very dense sand
Medium dense sand
Figure 5.4. Cone penetrometer results.
Evaluation of the cone penetrometer tests with the method proposed by Lunne &
Christoffersen (1983)
cv
cr b
qaD)'(
lnσ
= (5.6)
using parameters a = 2.86, b = 50 and c = 0.71 yielded similar relative densities as
those calculated by weighing the overall volume of sand. The variation in relative
density is limited to 11%.

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.15
5.6.2. Vertical bearing capacity
Displacement controlled experiments were carried out in which the footing was
centrally loaded in the vertical direction. The results are presented in dimensionless
form ( 3RV
R γπγσ
= versus R
w2
) as recommended by Bolton & Lau (1989).
0.00
0.05
0.10
0.15
0.20
0.25
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0 45.0
V/(γπR3) [-]
w/2
R [-
]
1g, 60 mm diameter
200g, 60 mm diameter
200g, 100 mm diameter
Figure 5.5. Vertical load-displacement results on medium dense sand.
Figure 5.5 illustrates the footing behaviour on medium dense sand. It is clear that
although the gradient of the curves differs only slightly at larger penetration, the initial
response is much stiffer at 1g than in the centrifuge. This is attributed to both the
dilatancy, which is extremely high at 1g, and the stiffness of the sand which increases
with the stress level. The stress-dependent nature of the vertical load-displacement
response is further underlined by experimental results obtained with different footing
sizes (Figure 5.5). At any given normalised vertical penetration, the stress exerted on the
soil under a 100 mm diameter footing is higher than under a 60 mm diameter footing,
which manifests itself in a softer response. At 1g, experiments on similar relative
densities were only performed using the 60 mm diameter footing.

Chapter 5
5.16
The fact that this apparent ‘size effect’ is actually a stress level effect has been
suggested previously by Bolton & Lau (1989), Lee & Salgado (2005) and Yamamoto et
al. (2005). Further, the mobilised friction angle varies across the width of the footing, an
effect which is more significant as the footing width increases.
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 50.0 100.0 150.0 200.0 250.0 300.0
V/(γπR3) [-]
w/2
R [-
]
1g, 60 mm diameter
1g, 100 mm diameter
200g
Figure 5.6. Vertical load-displacement results on very dense sand.
The above applies even more to very dense silica sand (which dilates more than medium
dense sand) as shown in Figure 5.6. At 1g, the mobilised friction angle is highly
exaggerated at the low stress levels, overriding the difference in response between the
larger and smaller footings. The response at 200g is much softer. Figure 5.7 shows the
response at elevated gravity only, highlighting the stress-dependency due to different
footing size. (The initial bedding effect taking place in the first fractions of a mm of
vertical penetration is attributed to the soil surface not being perfectly level, which is
almost impossible to achieve.) In order not to exceed the capacity of the loading arm,
the centrifuge tests had to be terminated at rather small embedments. Thus, the location
and magnitude of the peak vertical load, if it exists at such high stresses, is unclear.

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.17
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
0.018
0.020
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
V/(γπR3) [-]
w/2
R [-
]
200g, 60 mm diameter
200g, 100 mm diameter
Figure 5.7. Vertical load-displacement results on very dense sand (200g only).
The vertical load-displacement curves in Figures 5.6 and 5.7 have been presented in
terms of normalised total vertical displacement. As discussed when introducing the
model of Bienen et al. (2006), in the macroelement approach the hardening law has the
incremental vertical plastic displacement as its hardening term. There is always
uncertainty in deriving this plastic component of the vertical displacement from
experimental data, as an elastic displacement component must be removed from the
total displacement measured. The elastic vertical displacement is evaluated as the
vertical load divided by the elastic vertical stiffness, which in turn is best derived from
experimental unload-reload loops. In the experiments here, the vertical elastic stiffness
was determined to be similar for the medium dense silica sand and the very dense silica
sand ( 800≈vK MN/m prototype). As in any physical model of a shallow footing
estimating this value is extremely difficult, with minute displacements required to be
measured. (Although it is acknowledged that the elastic vertical stiffness will increase
with the square root of the vertical stress imposed on the soil, this refinement is not
deemed justified in interpreting these experiments given the difficulty of deriving even a
constant elastic stiffness value.)

Chapter 5
5.18
At 1g, where the displacements are relatively large but the loads are small, the
significance of the derived vertical elastic stiffness and therefore the magnitude of
elastic displacement is not high. Contrastingly, at the very small displacements and high
loads measured at 200g, the influence is much more prominent. This is illustrated in
Figures 5.8a and b where for the medium dense silica sand data the normalised vertical
load is presented against the total and estimated plastic vertical displacements,
respectively. The swipe tests are also shown, with the increase in plastic vertical
displacement throughout the test shown to increase. This needs to be accounted for in
interpreting the swipes as only the total vertical displacement is imposed to be zero.
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.0 1.0 2.0 3.0 4.0 5.0V/(γπR3) [-]
w/2
R [-
]
60 mm diameter100 mm diameter
swipe test
swipe test
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.0 1.0 2.0 3.0 4.0 5.0V/(γπR3) [-]
wp/2
R [-
]
60 mm diameter100 mm diameter
swipe test
swipe test
Figure 5.8. Influence of uncertainty in elastic vertical stiffness.
In the preceding discussion, the experimental results have been normalised so as to give
an indication of γN , which is expected to be the dominant contributor to the bearing
resistance close to the soil surface. Especially on the medium dense sand, however, the
almost linear response from the origin in the case of the centrifuge tests suggests the
contribution from the γN term to be insignificant. To reinforce this observation, the
data were normalised slightly differently (i.e. wR
Vw 2γπγσ
= ), thus expressing the
response in terms of qN . Figures 5.9 and 5.10 highlight the difference in response for
experiments carried out at 1g versus correctly scaled stress levels in the centrifuge.
a) b)

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.19
Although the 1g curves tend towards a steady state, the highly dilative behaviour owing
to the low confining stress is clear, with a maximum normalised vertical stress nearly
seven times higher at 1g than in the centrifuge for medium dense sand and twelve times
higher in very dense sand. On the medium dense sand, the centrifuge results reach
almost constant qN values from normalised embedment depths of only about
02.02
=R
w for the flat footings considered here. This confirms a significant influence of
the ‘ qN term’ even for shallow footings.
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.18
0.20
0.0 100.0 200.0 300.0 400.0 500.0 600.0
V/(γπR2w) [-]
w/2
R [-
]
1g, 60 mm diameter200g, 60 mm diameter
200g, 100 mm diameter
Figure 5.9. Vertical response in terms of Nq for medium dense sand.
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.0 500.0 1000.0 1500.0 2000.0 2500.0 3000.0
V/(γπR2w) [-]
w/2
R [-
]
1g200g
Figure 5.10. Vertical response in terms of Nq for very dense sand.

Chapter 5
5.20
Again, the stress-dependent nature of the response is apparent as the centrifuge results
obtained using the 60 mm diameter footing indicate 51≈qN but only 44≈qN for the
100 mm diameter footing. Unfortunately, the available data for the very dense sand does
not allow any conclusions to be made concerning qN values for the centrifuge tests as
these had to be terminated at very shallow embedments.
Similar, a bearing response that is close to linear with depth was observed previously on
highly compressible calcareous sand by Finnie & Randolph (1994), who suggested the
use of a ‘bearing modulus’ instead of the standard bearing capacity theory for such
material. Although the bearing modulus factor, taken as the ratio of gradient of the
bearing pressure-displacement response to the effective weight of the soil, is rather
similar to qN , it aims at expressing the different failure mechanism of compressible
sands compared to a Prandtl style mechanism. Yamamoto et al. (2005) suggest this
approach to be more appropriate than the conventional bearing capacity equation even
on silica sand at high stresses as compressional failure tends to dominate.
Independent of whether qN or a bearing modulus factor is the correct approach,
however, the results of this study confirm previous research, which concluded that
bearing capacity determined from small-scale laboratory tests will generally be
unconservative when extrapolated to field-size footings (Perkins & Madson 2000). In
centrifuge tests, however, the dimensionless group Rγσ is modelled correctly and
therefore should reflect prototype conditions. It seems evident that a hardening law as
part of a plasticity footing model derived from small scale 1g vertical load-displacement
tests overestimates the bearing capacity with respect to prototype conditions, especially
for very dense sand. Such a model errs on the unsafe side. However, it is very difficult

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.21
to determine the appropriate friction angle for which to evaluate the bearing capacity
factors if the hardening law is to be expressed using the traditional bearing capacity
equation (Terzaghi 1943). Since the average response over the entire footing is of
concern, the correct average friction angle representative of the relative sand density,
footing size, load level and soil-footing interface roughness needs to be determined. The
choice of bearing capacity factors γN and qN , on the other hand, is less crucial. A
number of researchers have published sets of bearing capacity factors (Bolton & Lau
1993; Frydman & Burd 1997; Cassidy & Houlsby 2002; Erickson & Drescher 2002;
Kumar 2004; Smith 2005). However, the difference between those for a given friction
angle is less significant than the difference a slight uncertainty in the friction angle
introduces to the bearing capacity estimate.
5.6.3. Yield surface shape and size in the vertical-torsional plane
A number of swipe tests were performed to investigate the yield surface shape and size.
During the tests, upon halting the vertical displacement just before the swipe event, the
vertical load dropped immediately by up to 20%. This is due to relaxation of the soil
prior to commencement of the torsional movement. It is very difficult to prevent as
there will always be some transitional time between the vertical actuator slowing down
to a halt and the generation of torsional resistance due to movement of the torsional
actuator. This effect was also commented on by Tan (1990) as well as Martin (1994). It
seems larger and more difficult to control in the centrifuge than at 1g.
As discussed in the previous section, the experimental results were corrected for soil
elasticity. The shape of the derived surfaces is shown in Figure 5.11 (all results are
obtained with the 60 mm diameter rough flat footing). In general, the yield surface
shape in the torsional plane seems to be similar to what has been observed in 1g testing

Chapter 5
5.22
previously, consisting of a curved section at high vertical loads and a frictional sliding
line at low vertical loads. However, at the higher stress levels in the centrifuge, the yield
surface in the vertical-torsional plane was observed to be much larger than previously
seen in small scale 1g tests (cf. Table 5.1). Further, as the torsional capacity at high
vertical loads is greater in the centrifuge, the load path intersects the frictional sliding
line at higher loads (at 5.0/ 0 ≈VV at 200g, but at only 1.0/ 0 ≈VV at 1g (Cassidy &
Cheong 2005)). Due to this, the maximum torsional capacity occurs within the curved
section of the yield surface in 1g tests, but coincides with the transition to the sliding
line in centrifuge experiments. Dilatant behaviour is observed in the tests as the footing
load increases just prior to the load path joining the sliding line. This applies to both
relative densities, but is much more pronounced in the very dense sand.
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
V/V0 [-]
Q/2
RV 0
[-]
Very dense sand
Medium dense sand
Yield surface (Eq. 5.1)
Yield surface (Eq. 5.1)
Frictional sliding line
Frictional sliding line2R
V, w
Q, ω
Figure 5.11. Swipe test results in load space.
Parameter values of 06.00 =q and 51.021 == ββ provide a good fit of the yield
surface of Equation 5.1 to the centrifuge data (for 5.0/ 0 >VV ). Note that this curvature
applies to the torsional plane only. If an overall fit to the yield surface for all six

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.23
degrees-of-freedom is sought, 76.021 == ββ (Bienen et al. 2006, Figure 5.1) is still
recommended.
No systematic influence of the embedment or preload on the maximum torsional
capacity was found (Figure 5.12). Note that the experimental data have been corrected
for soil elasticity and uncertainty in the elastic stiffness may affect the best fit parameter
values slightly.
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0 400.0
V0 [N]
Max
. Q/2
RV 0
[-]
Figure 5.12. Yield surface size on medium dense sand.
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
Q/2
RV 0
[-]
Rough flat footing
Smooth spudcan
Figure 5.13. Swipe test results on medium dense sand.

Chapter 5
5.24
The frictional sliding line can be described as VR
Qcv ⎟⎠⎞
⎜⎝⎛= φtan
61
2, which is slightly
lower than the previous suggestion of VR
Qcv ⎟⎠⎞
⎜⎝⎛= φtan
41
2 by Cassidy & Cheong (2005).
For a smooth footing, the frictional sliding line expectedly has a much shallower
gradient ( VR
Qcv ⎟⎠⎞
⎜⎝⎛= φtan151
2) as illustrated in Figure 5.13. From this curve, 0q is
estimated to be 0.024 (for 5.0/ 0 >VV , Equation 5.1).
It is difficult to establish from the available data (Figure 5.11) if the very dense silica
sand swipe curves are larger than those recorded in the medium dense silica sand. On
the one hand, the complete swipe curves on very dense sand suggest there is no
systematic difference to the medium dense sand results. On the other hand however, the
incomplete swipe tests suggest that the capacity on very dense silica sand might be even
higher than the medium dense sand curves. Further centrifuge testing is required to
clarify this question.
5.6.3.1 Explanation of change of yield surface size and shape
It was observed visually during the experiments that at 1g a large heave zone developed
around the footing. As the vertical and horizontal stresses in the sand were very low,
dilation of the sand was not suppressed enabling soil to flow sideways and up from
underneath the footing and significant heave to occur around the footing perimeter. This
explains the relatively low torsional resistance and simultaneous large drop in vertical
load under the imposed constant vertical displacement. In the centrifuge, however, the
stresses in the soil are much larger, posing significantly more resistance to soil dilation
and flow. Thus, only a minor amount of heave was observed, which was confined to
close proximity to the footing perimeter. The heave associated with dilation in the sand

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.25
due to torsional shearing therefore developed mainly underneath the footing, such that
relatively more vertical load was sustained during the swipe. This confined dilation also
produced larger normalised torsional resistance than at 1g. This holds until the frictional
sliding line is reached. The slightly lower gradient of this line as measured in the
centrifuge experiments implies that the stress distribution underneath the footing differs
slightly from that developed at 1g. This comparison of experimentally measured
response emphasises the way in which the stress level significantly influences the
failure mechanism.
Both vertical and torsional loads are seen to reduce to zero in the swipe test results
shown in Figures 5.11, 5.13 and 5.14. This total loss of capacity can be explained by
grain re-arrangement. On transition of the sand from dilatant to contractive behaviour,
the underlying sand will loosen contact with the footing base as its penetration is held
constant, enabling less torsional and vertical loads to be transferred. There is also the
possibility of an additional contribution from particle crushing, as the smaller grains
will fall into voids underneath, thereby retracting the sand further.
5.6.3.2 Swipe experiments in torsional load–displacement space
Figure 5.14 illustrates the response during the swipe event in torsional load-
displacement space. The initially soft response in a number of the curves is attributable
to flexibility in the torsional actuator assembly. The absolute values of twist should
therefore be treated with some caution. Apart from one test on the smooth spudcan,
which is labelled in the Figure, all curves shown were obtained with the 60 mm
diameter rough flat footing. The results suggest that the amount of twist required to
mobilise the maximum torsional capacity depends on the vertical preload level.

Chapter 5
5.26
Furthermore, the higher the preload level, the shallower is the post-peak gradient and
the more ductile the behaviour. This applies to both medium and very dense sand tests.
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8
ω [rad]
Q/2
RV 0
[-]
Very dense sand
Medium dense sand
Smooth spudcan,medium dense sand
Initially soft response due to actuator flexibility
Small preload (V0 = 4.4 MN), peak at low twist, sharp drop in load post-peak
Larger preload (V0 = 11.9 MN), peak at larger twist, more ductile behaviour post-peak
Increasing preload
Figure 5.14. Swipe test results in load-displacement space.
5.6.4. Flow in the vertical-torsional plane
To investigate what shape of plastic potential is required in the vertical-torsion plane,
plastic flow vectors during expansion of the yield surface are discussed in this section.
If the plastic displacement mechanism were linked with the yield surface through the
principal of associated flow, then the incremental displacement direction for plastic
flow, theoryp
theoryp
dwRd
,
,2 ω, would be perpendicular to the yield surface and therefore could be
obtained through differentiation of the yield surface equation. This yields
200
, 222RVqQRd theoryp λω = (5.7)
( ) ( ) ( ) ( )
0
12
0
2
01
212
0
2
0
12
02
212
,
1212
1212
VVV
VV
VVV
VV
dw theoryp
−−
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−
−⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−
=
ββββ
ββββλ (5.8)

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.27
for the curved section (where the yield surface can be described by Equation 5.1), where
( )( )
21
21
21
2112 ββ
ββ
βββββ
++= . (λ is a multiplier defining the magnitude of plastic displacement
obtained through the consistency condition, which ensures that during yield the load
point lies on the yield surface. This multiplier cancels out when considering the ratio of
theoryp
theoryp
dwRd
,
,2 ω.) Q and V are the measured loads in the test. 0V is derived from the yield
surface equation (Equation 5.1) for each of the experimental load combinations.
The experimental incremental direction of plastic flow testp
testp
dwRd
,
,2 ω is obtained by
isolating the plastic displacement components in the vertical and torsional directions,
respectively, according to Equations 5.9 and 5.10. The vertical elastic stiffness vK is
determined from unload-reload loops in vertical load-displacement tests, while the
elastic stiffness coefficients ( vk and qk ), used to evaluate the stiffness ratio between the
vertical and torsional directions, have been established through finite element analysis
(Doherty & Deeks 2003).
vtestp K
Vdwdw −=, (5.9)
qv
vtestp kRK
QkRdRd2
22 , −= ωω (5.10)
If the theoretical and experimental incremental directions of plastic flow agree, plastic
flow can be assumed to be associated. However, the experimental flow behaviour was
not associated as comparison of the experimental and theoretical (associated) plastic
displacement directions, indicated by arrows in Figure 5.15a, illustrates. The Figure
shows the results of a constant vertical load test on medium dense sand in the context of

Chapter 5
5.28
the yield surface formulation of Equation 5.1 and the frictional sliding line introduced
earlier. The incremental plastic displacement direction as deduced from the
experimental data increased throughout the testing event (including the later stage when
the torsional load is near constant, Figure 5.15b), approaching 90º.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 50.0 100.0 150.0 200.0 250.0 300.0
V [N]
Q [N
m]
theor.
exp.
exp.
exp.,theor.
exp.
exp.
exp.
theor.
theor.
The direction of the plastic displacement increments as deduced from the experimental data increases from about 31 degrees to about 83 degrees at almost constant load.
2Rdω
dwp
Incr. displ.direction
theor. (frictional sliding)
Frictional sliding line
Yield surface (Eq. 1)
exp.: As measured in the experimenttheor.: Theoretical associated flow vectors
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
ω [degrees]
Q [N
m]
Figure 5.15. Plastic flow behaviour during constant vertical load test, medium dense sand (model
dimensions).
Figure 5.16 compares the theoretical and experimental curves of constant vertical load
tests before frictional sliding occurs. 1g tests at similar relative densities to the
centrifuge tests have also been included. Values of 06.00 =q and 033.00 =q (Bienen et
al. 2006) were assumed for the centrifuge and 1g tests, respectively, while
51.021 == ββ was assumed for all tests. Note that the assumed yield surface shape and
size influences both the theoretical and the experimental curves, albeit in a different
manner.
Non-association of the measured response is evident in Figure 5.16 in all of the tests.
However, it is clear that again different behaviour is observed depending on the stress
field exerted on the soil (1g compared to 200g tests). With increasing stresses, the rate
of dilation and therefore the degree of non-association decreases. Further, as the self-
weight of the soil is scaled correctly in the centrifuge, in contrast to the 1g tests the
footing does not require to penetrate much during the testing event in order to maintain
a) b)

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.29
the vertical load constant. Accordingly, the ratio of the plastic twist to plastic vertical
displacement is higher because the vertical penetration does not dominate the response
as it does at 1g (for the same change in pω the increment of vertical plastic
displacement is about a factor of 154 higher at 1g than at 200g). This contributes to the
softer gradient of the curves in Figure 5.16. The scatter at the beginning of the
centrifuge curves is due to the flexibility in the torsional actuator and slight heave in
some of the tests (such that the vertical load is held constant while the sand underneath
the footing dilates).
0
10
20
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70
tan-1(2Rdωp/dwp) [°]
tan-1
(2Q
/(q02
RV)
) [°]
Medium dense sand
Very dense sand
αq = 1.0, β3 = β4 = β1 = β2 = 0.51, associated flow
αq = 1.7, β3 = β4 = 0.51αq = 5.0, β3 = β4 = 0.51
αq = 6.0, β3 = β4 = 0.51
1g200g
Figure 5.16. Non-association in plastic flow behaviour.
A value of 7.1=qα fits the centrifuge data well while higher values are applicable to
the 1g data. (The smooth spudcan data generally follow the same trend.) For modelling
purposes it is therefore critical to understand the stress dependent behaviour under the
footings and choose the model parameters accordingly.
Another type of experiments to investigate plastic flow behaviour is the proportional
displacement test, in which the torsional to vertical displacement ratio is held constant

Chapter 5
5.30
(Figure 5.3). Usually, these tests are carried out from the soil surface. A number of tests
are required to build information about the flow behaviour, contrasting with the
continuous curves obtained from constant vertical load tests. The results from
proportional displacement tests in this series of experiments are compared with the
constant vertical load test data in Figure 5.17. The reason why the proportional
displacement tests plot lower than the constant vertical load tests again lies in the soil
stress levels. Here, the stresses seem to be so high that dilation is suppressed. Further, it
appears to also affect the curvature of the plastic potential (with 3β and 4β values
possibly of around 0.8). However, it is not appropriate to fit parameter values to the
proportional displacement tests as not enough experimental data are available.
0
10
20
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70
tan-1(2Rdωp/dwp) [°]
tan-1
(2Q
/(q02
RV)
) [°]
Medium dense sand
Very dense sandProportional displacement tests
Constant vertical load tests
Figure 5.17. Constant vertical load tests versus proportional displacement tests.
5.6.5. Proportional hardening in the vertical-torsional plane
In the displacement-hardening plasticity model the expansion of the yield surface with
further penetration into the sand is defined by the hardening law. Whether this should be

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.31
purely a function of vertical plastic penetration or a combination of plastic vertical
displacement and twist (proportional hardening) has been investigated here.
As the mechanism of footing failure depends on the loading direction, the response to
purely vertical load differs from the behaviour under combined vertical-torsion loading
(or any other loading direction). The stresses in the soil are different and so are the
dilative (contractive) zones as well as the rate of dilation (contraction). Consequently,
also the vertical part of the response changes compared with purely vertical loading.
The magnitude of this difference is influenced by the loading direction and the
magnitude of the non-vertical load.
Knowing the yield surface size and shape, the 0V value corresponding to a particular
combination of load components can be evaluated from Equation 5.1. If this procedure
is applied to a series of load combinations measured in the experiment and the
respective 0V values plotted against vertical plastic penetration match the vertical
hardening law, proportional hardening is not relevant.
0
0.002
0.004
0.006
0.008
0.01
0.012
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
V0/(γπR3) [-]
wp/
2R [-
]
Vertical load-displacement test
200g, 60 mm diameter
Proportionaldispl. test2Rdωp/dwp = 0.25
Constant vertical load event
Scatter of vertical load-displacement tests
Figure 5.18. Proportional hardening on very dense sand at 200g.

Chapter 5
5.32
Figure 5.18 shows the results of constant vertical load tests, a proportional displacement
test and pure vertical load-displacement tests for comparison. Until the commencement
of the constant vertical loading event, the curves represent pure vertical load-
displacement behaviour. Thereafter, however, the vertical penetration increases only
very slightly (i.e. w is close to constant) while the yield surface (represented by 0V ) is
expanding to accommodate the increasing torsional load. This continues as the sand
dilates. Although the experimental results suggest that hardening based on the vertical
plastic penetration alone may underestimate 0V , this influence is not seen as significant
against the scatter of the pure vertical load-displacement curves.
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0 20 40 60 80 100 120 140 160 180 200
V0/(γπR3) [-]
wp/
2R [-
]
Vertical load-displacement test
1g
200g
Constant vertical load test
Figure 5.19. Proportional hardening on very dense sand.
Contrastingly, the response measured in 1g tests is illustrated in Figure 5.19. Upon
application of torsion the vertical capacity 0V deduced from the yield surface equation
increases. However, since soil under such low confining stress does not pose great
resistance to heave around the footing, the sand can re-arrange rather freely and thus the
footing requires to penetrate constantly in order to maintain the vertical load level. The
entire test event is accompanied by large vertical displacements, which override the

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.33
influence of the torsional contribution such that the curves resemble rather closely that
of a pure vertical load-displacement test. Similar behaviour is evident for planar VHM
loading in the 1g data published by Gottardi et al. (1999).
Therefore, although the curves of the 1g and 200g constant vertical load tests show
similar features, the response at low confining stresses is not representative of prototype
behaviour.
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5V0/(γπR3) [-]
wp/2
R [-
]
Vertical load-displacement test
200g, 60 mm diameter
Proportionaldispl. test2Rdωp/dwp = 0.022
Proportionaldispl. test2Rdωp/dwp = 0.239
Constant vertical load test
Figure 5.20. Proportional hardening on medium dense sand at 200g.
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 50 100 150 200 250
V0/(γπR3) [-]
wp/2
R [-
]
Vertical load-displacement test1g
1g
200g
Constant vertical load test
Figure 5.21. Proportional hardening on medium dense sand.

Chapter 5
5.34
Figures 5.20 and 5.21 document similar behaviour on medium dense sand. Expectedly,
the medium dense sand exhibits lower rates of dilation than the very dense sand.
Further, compared to the very dense sand, larger vertical displacements are required to
hold the vertical load.
The added dilation due to the twist in combination with the vertical movement in the
proportional displacement tests is evident in Figure 5.20 when comparing the response
of the test 239.02
=p
p
dwRdω
with the vertical load-displacement curves. In retrospective
modelling of the two proportional displacement tests (Figure 5.20) within the plasticity
framework, the high twist test ( 239.02
=p
p
dwRdω
) would require a yield surface
expanding with both plastic twist and vertical displacement. However, the low twist test
( 022.02
=p
p
dwRdω
) would be adequately modelled with only vertical hardening. For most
applications, only small amounts of twist would be expected and the footing load path
will resemble constant vertical load tests more closely than proportional displacement
tests. Therefore, in summary, a hardening law based on vertical plastic displacement is
expected to be sufficient for most practical purposes.
However, if proportional hardening is to be included in a plasticity model, similar
considerations to purely vertical hardening apply. The same expression should still be
capable of modelling the response albeit with a different friction angle. As for pure
vertical hardening, the friction angle representative of the entire soil-footing system is
sought. Since the friction angle implicitly accounts for dilation, the difficulty lies in
quantifying the amount of additional dilation due to non-vertical load, such that at the

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.35
same embedment a footing under combined load results in a higher average friction
angle and thus enhanced bearing capacity.
5.6.6. Recommendation of parameter values for the footing model
Although the experimental results discussed in this paper have highlighted the
importance of the stress field on the load-displacement response, the overall
displacement-hardening plasticity framework presented at the beginning of the paper
was shown to still be an adequate representation of prototype footing behaviour.
Parameter Eq. Bienen et al. (2006)
( 25≈′Rγσ )
Cassidy & Cheong (2005)
( 13020 <′< Rγσ )
This paper
( 4.54.0 <′< Rγσ )
Comments
0q
5.1 0.033 0.029 to 0.040 0.06 For rough flat footings.
1β
5.1 0.76 0.45 0.51
Yield Surface
2β
5.1 0.76 0.55 0.51
For use in combined six degree-of-freedom modelling,
76.021 == ββ is recommended.
qα
5.5 5.0 2.0a 1.7b For the 1g tests presented in this paper ( 110≈′Rγσ ), a higher value between 5.0 and 6.0 would be recommended.
3β
5.5 0.52 0.45 0.51
Flow Rule
4β
5.5 0.52 0.55 0.51
Notes: a Flow rule parameters of Cassidy & Cheong (2005) were as assumed for the horizontal and moment load combinations of Houlsby & Cassidy (2002) and do not represent further testing.
b These values are based on the constant V tests.
Table 5.3. Recommended values of strain-hardening plasticity model parameters for the vertical-
torsional space.

Chapter 5
5.36
However, for accurate predictions to be achieved, model parameters need to reflect the
stress conditions under the footing. Table 5.3 details recommended parameter values for
the use of the displacement-hardening plasticity model of Bienen et al. (2006). The new
values are more appropriate for the stress levels associated with jack-up spudcan
footings.
For the vertical-torsional plane, shaping parameters 51.021 == ββ were found to
provide a good fit of the yield surface of Equation 5.1 to the centrifuge data. However,
when applying the yield surface to data in all six degrees-of-freedom, a compromise
best fit of 76.021 == ββ is still recommended (Bienen et al. 2006).
5.7. CONCLUSION
The data from centrifuge experiments presented in this paper highlight the dependence
of all aspects of shallow footing behaviour on the soil stress state. The displacement-
hardening plasticity framework outlined for circular footings on sand by Bienen et al.
(2006) was shown to still be applicable in the prediction of the load-displacement
response for large highly stressed footings. However, the following points should be
noted.
• The yield surface in the normalised vertical-torsional plane was shown to be
larger for highly stressed large footings than previous small scale model tests at
1g suggested. Further, torsional sliding was observed to occur at higher
normalised vertical load levels.
• However, prediction of the yield surface size is more sensitive to the vertical
capacity at a given embedment ( 0V ) than to the normalised shape ( 0q ). A
hardening law that is accurate and appropriate for the soil stress level under the

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.37
footing is therefore crucial for modelling of applications where the vertical
penetration is known and 0V is evaluated from the hardening law. Further, this is
important for the yield surface expansion during yield.
• Although plastic deformation in other degrees-of-freedom influences the
response, for cases of similar or constant vertical load a hardening law based on
vertical plastic displacement appears sufficient to model the behaviour.
• Contrasting to the extremely dilative response at very low confining stresses,
plastic flow behaviour at prototype stresses showed a much lower degree of non-
association.
Following these observations new model parameter values have been recommended for
the vertical-torsional space of the macroelement plasticity model described by Bienen et
al. (2006), applicable to the normalised stress levels tested in these experiments. For
cases outside this range further consideration should be given to model applicability and
parameter selection.
The centrifuge experiments presented in this paper have been performed in the vertical-
torsional plane. The results encourage further centrifuge testing involving VHM
loading combinations to clarify the stress-dependency of the behaviour in those planes.
It is recommended to use an experimental set-up that enables individual control of
horizontal and moment load to facilitate the data analysis. Moreover, all tests reported
here were performed on dry sand. Prototype footings will almost certainly rest on water-
saturated sand so that drainage conditions during loading may be important. This is an
area worthy of investigation.

Chapter 5
5.38
5.8. REFERENCES
Bienen, B., Byrne, B.,W. Houlsby, G.T. & Cassidy, M.J. (2006). Investigating six degree-of-freedom loading of shallow foundations on sand. Géotechnique, Vol. 56, No. 6, pp. 367-379.
Bienen, B. & Cassidy, M.J. (2006). Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures. Marine Structures, Vol. 19, No. 2-3, pp. 110-140.
Bolton, M.D. & Lau, C.K. (1989). Scale effects in the bearing capacity of granular soils. Proc. 12th International Conference on Soil Mechanics and Foundation Engineering, Balkema, Rio de Janeiro, Brasil.
Bolton, M.D. & Lau, C.K. (1993). Vertical bearing capacity for circular and strip footings on Mohr-Coulomb soil. Canadian Geotechnical Journal, Vol. 30, pp. 1024-1033.
Butterfield, R. & Ticof, J. (1979). Design parameters for granular soils. Proc. 7th ECSMFE, Brighton, UK, pp. 259-261.
Byrne, B.W. & Houlsby, G.T. (2001). Observations of footing behaviour on loose carbonate sands. Géotechnique, Vol. 51, No. 5, pp 463-466.
Byrne, B.W. & Houlsby, G.T. (2005). Investigating 6 degree-of-freedom loading on shallow foundations, Proc. International Symposium on Frontiers in Offshore Geotechnics (ISFOG), Perth, Australia.
Cassidy, M.J. (2007). Experimental observations of the combined loading behaviour of circular footings on loose silica sand. Géotechnique, in press.
Cassidy, M.J. & Bienen, B. (2002). Three-dimensional numerical analysis of jack-up structures on sand, Proc. 12th International Offshore and Polar Engineering Conference, Kitakyushu, Japan, pp. 807-814.
Cassidy, M.J., Byrne, B.W. & Houlsby, G.T. (2002a). Modelling the behaviour of circular footings under combined loading on loose carbonate sand. Géotechnique, Vol. 52, No. 10, pp. 705-712.
Cassidy, M.J. & Cheong, J. (2005). The behaviour of circular footings on sand subjected to combined vertical-torsion loading. International Journal of Physical Modelling in Geotechnics, Vol. 5, No. 4, pp. 1–14.
Cassidy, M.J. & Houlsby, G.T. (1999). On the modelling of foundations for jack-up units on sand. Offshore Technology Conference, Houston, Texas, OTC 10995.
Cassidy, M.J. & Houlsby, G.T. (2002). Vertical bearing capacity factors for conical footings on sand. Géotechnique, Vol. 52, No. 9, pp. 687-692.
Cassidy, M.J., Houlsby, G.T., Hoyle, M. & Marcom, M. (2002b). Determining appropriate stiffness levels for spudcan foundations using jack-up case records. Proc. 21st International Conference on Offshore Mechanics and Arctic Engineering (OMAE), Oslo, Norway, OMAE2002-28085.
Cassidy, M.J., Martin, C.M. & Houlsby, G.T. (2004). Development and application of force resultant models describing jack-up foundation behaviour. Marine Structures, Vol. 17, pp. 165-193.
Cheong, J. (2002). Physical testing of jack-up footings on sand subjected to torsion. Honours thesis, Centre for Offshore Foundation Systems, University of Western Australia.
Doherty, J.P. & Deeks, A.J. (2003). Elastic response of circular footings embedded in a non-homogeneous half-space. Géotechnique, Vol. 53, No. 8, pp. 703-714.

Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading
5.39
Elkhatib, S. (1997). In situ assessment of the shear strength of soils. Honours thesis, University of Western Australia.
Erickson, H.L. & Drescher, A. (2002). Bearing capacity of circular footings. Journal of Geotechnical and Geoenvironmental Engineering, ASCE, Vol. 128, No. 1, pp. 38-43.
Finnie, I.M.S. & Randolph, M.F. (1994). Bearing response of shallow foundations in uncemented calcareous soil. In Centrifuge 94 (Eds. Leung, C.F., Lee, F.H. & Tan, T.S.), Balkema, Rotterdam.
Frydman, S. & Burd, H.J. (1997). Numerical studies of bearing-capacity factor Nγ. Journal of Geotechnical and Geoenvironmental Engineering, ASCE, Vol. 123, No. 1, pp. 20-29.
Gottardi, G., Houlsby, G.T. & Butterfield, R. (1999). Plastic response of circular footings on sand under general planar loading. Géotechnique, Vol. 49, No. 4, pp. 453-469.
Houlsby, G.T. & Cassidy, M.J. (2002). A plasticity model for the behaviour of footings on sand under combined loading. Géotechnique, 52, No. 2, pp. 117-129.
Kumar, J. (2004). Effect of footing-soil interface friction on bearing capacity factor Nγ. Géotechnique, Vol. 54, No. 10, pp. 677-680.
Lee, J. & Salgado, R. (2005). Estimation of bearing capacity of circular footings on sands based on cone penetration test. Journal of Geotechnical and Geoenvironmental Engineering, ASCE, Vol. 131, No. 4, pp. 442-452.
Lunne, T. & Christoffersen, H.P. (1983). Interpretation of cone penetrometer data for offshore sands. Offshore Technology Conference, Houston, Texas, OTC 4464.
Martin, C.M. (1994). Physical and numerical modelling of offshore foundations under combined loads. DPhil. thesis, University of Oxford.
Martin, C.M. & Houlsby, G.T. (2000). Combined loading of spudcan foundations on clay: Laboratory tests. Géotechnique, Vol. 50, No. 4, pp. 325-338.
Martin, C.M. & Houlsby, G.T. (2001). Combined loading of spudcan foundations on clay: Numerical modelling. Géotechnique, Vol. 51, No. 8, pp. 687-699.
Nova, R. & Montrasio, L. (1991). Settlements of shallow foundations on sand. Géotechnique, 41, No. 2, pp. 243-256.
Ovesen, N.K. (1979). The use of physical models in design (panel discussion). Proc. 7th ECSMFE, Brighton, UK.
Perkins, S.W. & Madson, C.R. (2000). Bearing capacity of shallow foundations on sand: A relative density approach. Journal of Geotechnical and Geoenvironmental Engineering, ASCE, Vol. 126, No. 6, pp. 521-530.
Randolph, M.F., Jewell, R.J., Stone, K.J.L. & Brown, T.A. (1991). Establishing a new centrifuge facility. In Centrifuge 91 (Eds. Ko, H.Y. & McLean, F.), Balkema, Rotterdam, pp. 2-9.
Smith, C.C. (2005). Complete limiting stress solutions for the bearing capacity of strip footings on a Mohr-Coulomb soil. Géotechnique, Vol. 55, No. 8, pp. 607-612.
Tan, F.S.C. (1990). Centrifuge and theoretical modelling of conical footings on sand. PhD thesis, Cambridge University.
Taylor, R.N. (1995). Geotechnical centrifuge technology. Chapman and Hall, London.
Terzaghi, K. (1943). Theoretical soil mechanics. John Wiley & Sons, New York.

Chapter 5
5.40
Thompson, R.S.G. (1996). Development of non-linear numerical models appropriate for the analysis of jackup units. DPhil. thesis, University of Oxford.
Watson, P.G. (1999). Performance of skirted foundations for offshore structures. PhD thesis, University of Western Australia.
Williams, M.S., Thompson, R.S.G. & Houlsby, G.T. (1998). Non-linear dynamic analysis of offshore jack-up units. Computers and Structures, Vol. 69, pp. 171-180.
Yamamoto, N., Randolph, M.F. & Einav, I. (2005). Numerical study of shallow foundations on calcareous sand. Proc. International Symposium on Frontiers in Offshore Geotechnics (ISFOG), Perth, Australia.
Zhu, F., Clark, J.I. & Phillips, R. (2001). Scale effect of strip and circular footings resting on dense sand. Journal of Geotechnical and Geoenvironmental Engineering, ASCE, Vol. 127, No. 7, pp. 613-621.

CHAPTER 6
6.1
PHYSICAL MODELLING OF THE PUSH-OVER CAPACITY OF A JACK-UP STRUCTURE ON SAND IN
THE GEOTECHNICAL CENTRIFUGE
ABSTRACT
Offshore jack-up drilling rigs are subject to loading from wind, waves and current in
addition to their self-weight. This applies combined loading in all six degrees-of-
freedom in space on the footings. Although the foundation-soil interaction is crucial to
the overall response of a jack-up structure, current state-of-the-art models to predict
jack-up footing behaviour, developed using data from single footing experiments, have
not been validated for such multi-footing systems under general combined loading. This
paper introduces the experimental development of a three-legged model jack-up and
loading apparatus designed to investigate the rig’s response – in particular the footing
load paths - under combined loading in three dimensions. Push-over experiments were
performed in a geotechnical beam centrifuge on silica sand. Experimental results of two
tests on dense sand are discussed, highlighting differences in response and mode of
failure depending on the loading direction of the jack-up. The importance of three-
dimensional modelling is also stressed by experimentally demonstrating that the
symmetric load case is not necessarily conservative.

Chapter 6
6.2
6.1 INTRODUCTION
Jack-up drilling rigs are mobile offshore structures resting on typically three shallow
foundations called spudcans (Figure 6.1). Although the trend continues to utilise these
rigs in deeper waters and thus harsher environmental loading conditions, understanding
of the rig’s response and in particular the foundation behaviour remains unsatisfactory.
This is reflected in reported statistics, as the accident rate for this type of offshore
structure remains higher than for fixed platforms (Hunt & Marsh 2004, for instance).
Over 160m
Over 20m All dimensions approximate
Figure 6.1. Typical jack-up and spudcan (modified after Reardon 1986).
Force-resultant models based on hardening plasticity theory, representing state-of-the-
art foundation modelling for cases such as jack-ups have been developed (Schotman
1989; Nova & Montrasio 1991; Byrne & Houlsby 2001; Martin & Houlsby 2001;
Houlsby & Cassidy 2002; Cassidy et al. 2002, 2004; Bienen et al. 2006), where the
prediction of displacements of the footing under combined loading is important in order
to predict the overall system response. Results from single footing test, performed on
the laboratory floor (Martin 1994; Gottardi et al. 1999; Byrne & Houlsby 2001; Cassidy
& Cheong 2005; Bienen et al. 2006) and in geotechnical centrifuges (Tan 1990; Murff
et al. 1992; Bienen et al. 2007; Cassidy 2007) have been used to validate the footing

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.3
model features and calibrate its parameters. However, the load paths applied in these
experiments were designed to aid model development and were not representative of
actual jack-up spudcan load paths.
Experiments on model jack-up have been reported previously. For instance, Vlahos
(2004) and Vlahos et al. (2005) describe 1g physical modelling of a 1:250 scale three-
legged jack-up resting on clay. The experiments explored the footing load paths, load
redistribution among the footings, hull and footing displacements at failure, and
ultimate system capacity. A series of centrifuge tests of a model jack-up has also been
carried out at Cambridge University on clay (Dean et al. 1996) and sand (Murff et al.
1991; Tsukamoto 1994; Dean et al. 1995; and Hsu 1998). These studies focussed on
footing stiffness (rotational stiffness in particular) under working loads. However, the
model rig was relatively small and stocky in size, its dimensions not representative of
present day field jack-ups, which are rather flexible structures with long relatively
slender legs.
In all of these jack-up model experiments, the line of action of the horizontal load
applied at the hull representing environmental loading coincided with the system’s axis
of symmetry (that is, only planar vertical-horizontal-moment (VHM ) loading was
accounted for). These ‘symmetrical’ loading conditions enable simplified two-
dimensional analysis of jack-ups. However, environmental loading from wind, waves
and current will neither always act along the system’s ‘axis of symmetry’, nor
necessarily be collinear. This implies combined loading on the jack-up structure, which
introduces loading in all six degrees-of-freedom in space on the shallow footings
(Figure 6.2). The ‘symmetrical’ case may not always be the critical loading direction.
Therefore, better understanding of the behaviour of jack-up rigs under general combined

Chapter 6
6.4
loading is required to improve models for the prediction of jack-up response in three
dimensions. To the authors’ knowledge, no experiment on a model jack-up has been
performed where the rig experienced general combined loading in space.
Hull reference point,hull centre of gravity
Leg A
Leg B
V, w
1
Q, ω
Leg C
H2, u22
M2, θ2
H3, u3
3
M3, θ3
Horizontal loading direction
αTest 1, α = 0 degrees
Test 2, α = 22 degrees
V, w
2R
1
Q, ω
H2, u22
M2, θ2
H3, u3
3M3, θ3
Axis of symmetry
Figure 6.2. Sign convention (after Butterfield et al. 1997) and loading directions.
This paper introduces the development of a model jack-up rig and loading apparatus.
The experiments were performed under true scale stresses in a geotechnical beam
centrifuge. The aims of the experiments were to show the footing load paths of a jack-
up on sand for general combined loading in space, including load redistribution between
the three footings. This plays an important role as - contrary to a single-footing system -
failure of one spudcan in a multi-footing structure does not necessarily imply failure of
the system. Further aims include investigation of differences in the load-displacement
response and eventually the failure modes of the jack-up for different orientations to the

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.5
applied load (Figure 6.2). The experimental results are intended for evaluation of the
performance of a force-resultant plasticity footing model for six degrees-of-freedom
(Bienen et al. 2006) when used in predicting the response of a three-legged prototype
jack-up. Unless otherwise stated all dimensions, loads and displacements are presented
in prototype scale.
6.2 DESIGN OF A MODEL JACK-UP FOR EXPERIMENTAL INVESTIGATION IN THE BEAM CENTRIFUGE
There are numerous different jack-up designs being used in the field. As the aim of the
tests here was not to focus on one particular rig design but to investigate jack-up
behaviour in general, a generic prototype was modelled.
Table 6.1 summarises key dimensions of several jack-ups currently operating in the
world’s offshore fields. These formed the basic considerations for the choice of an
average prototype. However, a number of other design considerations also significantly
influenced the development.
6.2.1 Design considerations for the model jack-up
Design considerations for the development of the model jack-up included:
• Creation of a 1:N model scale generic jack-up representative of an average
current field jack-up for testing at an acceleration of multiple (N) times that of
Earth’s gravity in the centrifuge (known as Ng). The experiments were
performed at an acceleration of 200g in the UWA beam centrifuge. The model
jack-up was therefore designed as a 1:200 scale version of the prototype. Correct
scaling of the prototype geometry is important in order to obtain load paths
similar those in field jack-ups. This is crucial to the relevance of the

Chapter 6
6.6
Spud
can
diam
eter
[m]
12.2
-15.
2
17.0
-18.
3
12-1
4.0
11.5
-14.
0
1.00
Ø
Leg
leng
th
[m]
109.
7-11
3.7
140.
5-16
6.9
106.
7-12
6.8
76.3
-127
.1
8.74
Ø
Aft
legs
(C
entr
e to
ce
ntre
) [m
]
35.1
-37.
1
43.3
-54.
6
Not
kno
wn
Not
kno
wn
2.71
Ø
Fwd.
leg
to o
f aft
legs
(c
entr
e to
cen
trel
ine)
[m
]
36.6
-37.
8
39.6
-47.
2
Not
kno
wn
Not
kno
wn
2.61
Ø
Hul
l de
pth
[m]
6.1-
7.6
8.2-
9.5
6.1-
7.6
5.5-
7.6
0.52
Ø
Hul
l w
idth
[m]
53.0
-53.
6
71.8
-76.
2
51.2
-53.
6
49.4
-53.
6
4.18
Ø
Hul
l le
ngth
[m]
54.9
-63.
2
67.1
-70.
4
54.9
-63.
1
53.0
-63.
1
4.51
Ø
Rig
ENSC
O (5
7, 8
6, 9
4) (1
)
F&G
(Alp
ha 3
50, J
U-2
000,
U
nive
rsal
M c
lass
) (2)
GSF
(Hig
h Is
land
I, M
ain
Pass
I, R
ig 1
03, R
ig 1
27) (3
)
Nob
le (C
arl N
orbe
rg,
Cha
rles C
opel
and,
Dic
k Fa
vor,
Ed N
oble
, Geo
rge
McL
eod)
(4)
Ave
rage
, as a
pro
port
ion
of th
e sp
udca
n di
amet
er
(1) h
ttp://
ww
w.e
nsco
us.c
om/
(2) h
ttp://
ww
w.fn
g.co
m/
(3) h
ttp://
ww
w.g
loba
lsan
tafe
.com
/ (4
) http
://w
ww
.nob
leco
rp.c
om/
Tab
le 6
.1.
Typ
ical
fiel
d ja
ck-u
p di
men
sion
s.

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.7
experiments. As the model jack-up had to be accommodated within the space
limitations of the UWA beam centrifuge (Randolph et al. 1991, Figure 6.3), the
maximum possible model spudcan diameter was 50 mm. This was to allow leg
spacings as described in Table 6.1 as well as sufficient clearance to the testing
container boundary. The remaining model dimensions (Table 6.2) were then
determined using the average field jack-up ratios (Table 6.1) as guidance. The
built design is equivalent to a medium size prototype with a leg length of 89 m
and 10 m diameter spudcans (Table 6.2). The design allows two testing sites on
the same soil sample, which ensures consistency between experiments.
• Correct scaling of the structural properties ( EA , EI ) between model and
prototype (Table 6.3), which is equally important to obtaining load paths
relevant to field jack-ups. As the overall system behaviour was of interest in
these experiments rather than stresses in individual members of the trusswork
legs, for instance, the model jack-up is built of equivalent structural members.
Cost and time constraints also supported this design.
• Correct scaling of the mass to apply the correct self-weight. This required to be
taken into consideration due to the chosen experimental set-up (detailed in
Sections 6.3.1 and 6.4.1) for the installation and preloading phase as well as the
horizontal loading phase and became the deciding factor in selecting fabrication
from aluminium.
The gravitational field in the centrifuge changes with respect to the rotational centre of
the centrifuge and thus it varies over the model’s height. The experimental priority was
to scale the soil stress field correctly and therefore the acceleration level was set at 200g
at the soil surface. It is argued that the measured response of the 1:200 model jack-up is

Chapter 6
6.8
due to the footing reactions at an elevated gravity level of 200g, and therefore the
scaling factor of N = 200 is applied when converting the experimental results to
prototype units according to Table 6.4. However, scaling by N = 200 throughout does
not apply to the self-weight. Here, the scaling factor varies indeed between N = 145 at
the hull to N = 200 at the spudcans. However, the vertical load acting on the footings is
measured throughout the test by strain gauges at the bottom of each of the three legs and
therefore the loads applied to the spudcan footings are known accurately.
Strongbox Sand
Verticalactuator
Modeljack-up
Centrifugeconstrains
Verticalloadingarm
Frame
Centrifugeconstraints
Pulleymotor
Pulleywire
Wire becomes horizontal afterpreloading of the jack-up
Figure 6.3. Centrifuge constraints, model jack-up and loading apparatus (schematic, modified
after Byron-Brown 2004).
Instrumentation of the model jack-up is detailed in Section 6.2.2, whereas the design of
the loading apparatus is discussed in Section 6.3.

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.9
Spud
can
diam
eter
1.0Ø
1.0Ø
50 m
m
10 m
1.0Ø
72 m
m
18 m
1.0Ø
57.8
mm
6.5
m
13 m
Leg
leng
th
8.74
Ø
8.90
Ø
445
mm
89 m
8.33
Ø
600
mm
150
m
4.28
Ø
246.
4-25
0.4
mm
31.5
-32.
1 m
63.1
63.3
3 m
Fwd.
leg
to o
f aft
legs
(c
entr
e to
cen
trel
ine)
2.71
Ø
2.50
Ø
125
mm
25 m
2.5Ø
187
mm
46.8
m
3.22
Ø
186
mm
23.8
m
47.6
m
Aft
legs
(C
entr
e to
cen
tre)
2.61
Ø
2.70
Ø
135
mm
27 m
2.83
Ø
216
mm
54 m
3.72
Ø
215
mm
27.5
m
55.0
Hul
l dep
th
0.52
Ø
0.64
Ø
32 m
m
6.4
m
0.56
Ø
40 m
m
10 m
1.73
Ø
106.
6 m
m
13.6
m
27.3
m
Hul
l wid
th
4.18
Ø
3.90
Ø
195
mm
39 m
3.89
Ø
280
mm
70 m
3.29
Ø
190
mm
24.3
m
48.6
m
Hul
l len
gth
4.51
Ø
4.20
Ø
210
mm
42 m
4.33
Ø
324
mm
81 m
3.98
Ø
230
mm
29.5
m
58.9
m
Com
men
t
Rat
io re
latin
g to
spud
can
diam
eter
Des
ign
dim
ensi
on re
latin
g to
spud
can
diam
eter
=> B
uilt
mod
el b
ased
on
50 m
m
diam
eter
spud
can
Cor
resp
ondi
ng p
roto
type
(N =
200
)
Rat
io re
latin
g to
spud
can
diam
eter
Bui
lt m
odel
(1: 2
50 sc
ale)
Cor
resp
ondi
ng p
roto
type
Rat
io re
latin
g to
spud
can
diam
eter
Bui
lt m
odel
Cor
resp
ondi
ng p
roto
type
(N =
128
)
Cor
resp
ondi
ng p
roto
type
(N =
256
)
Jack
-up
rig
Ave
rage
fiel
d ja
ck-u
p
Mod
el ja
ck-u
p in
this
pap
er
Vla
hos (
2004
)
Cam
brid
ge
mod
el
(Mur
ff e
t al.
1991
; Ts
ukam
oto
1994
; Dea
n et
al
. 199
5, 1
996;
an
d H
su 1
998)
Not
e:
For c
onsi
sten
t mod
ellin
g of
a p
roto
type
a 1
:N m
odel
is te
sted
at N
g in
the
cent
rifug
e. B
etw
een
the
mod
el a
nd th
e pr
otot
ype,
leng
th is
scal
ed b
y 1:
N.
Tab
le 6
.2.
Dim
ensi
ons o
f bui
lt U
WA
scal
ed ja
ck-u
p, w
ith c
ompa
riso
n to
Vla
hos (
1994
) and
the
Cam
brid
ge c
entr
ifuge
mod
el.

Chapter 6
6.10
Com
men
t
The
mod
el ja
ck-u
p w
as
built
from
alu
min
ium
w
here
as fi
eld
jack
-ups
ar
e us
ually
bui
lt fr
om
stee
l. D
ue to
the
diff
eren
t m
ater
ial a
nd h
ence
di
ffer
ent Y
oung
’s
mod
ulus
, the
gro
ups o
f EA
and
EI h
ave
to b
e sc
aled
cor
rect
ly, r
athe
r th
an th
e pr
oper
ties o
f E,
A an
d I i
ndiv
idua
lly.
Typ
ical
pro
toty
pe
(Vla
hos e
t al.
2005
)
2.0x
108 [k
N/m
2 ]
1.0
[m2 ]
7.2
[m4 ]
2.0x
108 [k
N]
1.4x
109 [k
Nm
2 ]
Prot
otyp
e
(not
scal
ed
dire
ctly
)
(not
scal
ed
dire
ctly
)
(not
scal
ed
dire
ctly
)
5.7x
108
[kN
] (*)
1.4x
109 [k
Nm
2 ]
Bui
lt
Mod
el
6900
0 [N
/mm
2 ]
207.
3 [m
m2 ]
1277
7.6
[mm
4 ]
14.3
x106 [N
] (*)
8.8x
108 [N
mm
2 ]
Prot
otyp
e
(not
scal
ed
dire
ctly
)
(not
scal
ed
dire
ctly
)
(not
scal
ed
dire
ctly
)
N2
N4
Rel
atio
nshi
p
Mod
el
- - - 1 1
Prop
erty
E leg
A leg
I leg
EAle
g
EIle
g
Not
e:
(*) P
riorit
y w
as p
lace
d on
scal
ing
the
flexu
ral s
tiffn
ess c
orre
ctly
(Sec
tion
2.1.
2).
Tab
le 6
.3.
Stru
ctur
al p
rope
rtie
s of t
he ja
ck-u
p m
odel
legs
and
cor
resp
ondi
ng p
roto
type
.

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.11
Entity Model Prototype
Length, displacement 1 N
Angle, rotation 1 1
Vertical load V 1 2N
Horizontal load H 1 2N
Moment M 1 3N
Table 6.4. Scaling laws.
6.2.1.1 The hull
The hull of the jack-up, shown in Figure 6.4a, takes the shape of an equilateral triangle
of 42 m side length. Similar to the appearance of field jack-ups, the ‘triangle corners’
were truncated.
The hull was required to be significantly stiffer than the legs. However, accurate
modelling of the second moment of area and area was sacrificed in order to correctly
scale the prototype hull mass, which was regarded paramount. Details such as ballast
tanks or drilling equipment were not modelled. The model hull was machined from a
solid aluminium block. A hole was cut at the centre of gravity in order to accommodate
the preloading arrangement (Section 6.3.1).
6.2.1.2 The legs
The model jack-up legs were made of aluminium pipe sections representing equivalent
structural properties (Table 6.3). Priority was placed on the accurate modelling of the
flexural stiffness and self-weight. The chosen cross-section has an outer diameter of
25 mm and 3 mm wall thickness, equating to a 5 m diameter and 0.6 m wall thickness in
prototype dimensions. The prototype leg length is 89 m. The legs are rigidly attached to
the hull, although finite stiffness and non-linearity of the leg-hull connection (see
Spidsøe & Karunakaran 1996, for example) is recognised.

Chapter 6
6.12
Jack-up hull
LDT2
LDT1
LDT3LDT4
Tilt sensor 1 Tilt sensor 2
Pulley load cell
Leg ALeg BLeg C
Top bending gauges
LDT2
LDT4
Tilt2
Tilt1
LDT1LDT1
(LDTs connected to frame or cross-beams)
Hull
Leg A
Leg B
Leg C
Legs B, C Leg A
Tilt1LDT1,2
LDT4
Tilt2
LDT3
Hull
Load cell
Pulley system
Figure 6.4. Model jack-up and instrumentation: a) 1g trial test, b) schematic).
6.2.1.3 The spudcan footings
10 m diameter spudcans were chosen for the model jack-up as outlined in Section 6.2.1.
As the spudcan spacing is replicated correctly from a prototype rig, the footing
interaction will be similar to that in the prototype. The footing elevation and spudcan
a)
b)

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.13
dimensions are shown in Figure 6.5. The footing plan is circular. The spudcans are
threaded at the top to screw into the legs. This makes the spudcans interchangeable
should it be decided to test the rig with different diameter or different shaped footings at
a later date. No specific treatment was applied to the aluminum, leading to a smooth
spudcan-soil interface.
5.0 (25.0)
0.9 (4.5) 1.45 (7.25)
3.9 (19.5)
1.1 (5.5)
Load reference point
Prototype dimensions [m] (Model dimensions [mm])
Figure 6.5. Prototype spudcan elevation and dimensions, load reference point.
6.2.2 Instrumentation of the model jack-up
Although it was desirable to record spudcan loads as well as displacements at the hull
and at the spudcans in all six degrees-of-freedom (Figure 6.2), it was decided not to
track footing displacements individually to limit instrumentation.
6.2.2.1 Load measurement
All three legs are strain-gauged for axial load, as well as bending in both orthogonal
axes (Figure 6.2). The axial strain gauges (EA-13-062UT-350) are located 40 mm above
the footings. Two sets of bending gauges (EA-13-125MK-120) are used, positioned
perpendicular to each other at 43 mm from the top and 23 mm from the bottom of the
legs, respectively.

Chapter 6
6.14
Assuming simple beam theory, the shear forces ( 2H , 3H ) and bending moments ( 2M ,
3M ) in both orthogonal axes can be derived from the bending gauges. As the vertical
load (V ) is measured directly, this leaves only the leg torsion Q unknown. This,
however, is not considered a major drawback in tracking the footing load paths during
the experiment.
6.2.2.2 Displacement measurement
Displacements in all six degrees-of-freedom are measured at the hull (hull reference
point HRP, Figure 6.2). A set of four linear displacement transducers (LDT, two
SLS095/20/0.8/R/50, one SLS095/40/1.6/R/50 and one SLS095/100/4.0/R/50, all
Penny + Giles) is used to record the vertical ( w ) as well as horizontal displacement
along both axes ( 2u , 3u ). These devices offer very precise displacement measurement
whilst being compact in size (to enable mounting within the space limitations of the
centrifuge set-up) and very lightweight (approximately 13 g at 1g for the smallest, and
25.5 g for the largest LDT), so as to affect the model response as little as possible. The
arrangement is shown in Figure 6.4b. In addition to the three orthogonal displacement
components in space ( w , 2u , 3u ) measured directly, twist ω can be derived from the
pair of LDTs mounted horizontally at the rear of the hull (LDT1 and LDT2, Figure 6.4).
Rotations in both orthogonal directions ( 2θ , 3θ ) are measured using tilt sensors (EZ-
VIB-3000-005 Analog Linear Tilt System by Advanced Orientation Systems Inc.).
These sensors were found to have a slightly reduced range at elevated g levels, which
alters the calibration factor. Linearity and sensitivity, however, did not seem to be
affected. One tilt sensor was mounted on top of the hull along its centreline, the other
one perpendicular to this at the back of the platform (Figure 6.4).

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.15
6.3 DESIGN OF THE LOADING APPARATUS
The purpose of these experiments was to obtain information on the footing load paths
and the system behaviour of the rig during a monotonic push-over. The data is intended
to be used further to validate an existing six degree-of-freedom force-resultant plasticity
footing model (Bienen et al. 2006; Bienen et al. 2007) at prototype system scale.
Therefore, a realistic yet not too complex loading situation was sought to be applied to
the system. Further, this loading needed to be completely automated as the experimental
set-up is inaccessible during the test. The loading distinguishes between an installation
and preloading phase and a horizontal loading (operational) phase.
6.3.1 Installation and preloading
In order to produce load paths representative of field jack-ups, it was important to
perform the installation phase of the experiments at correctly scaled soil stress levels.
Therefore, installation of the model jack-up was to take place in flight. Further, similar
to field procedure, the unit was to be preloaded vertically before being unloaded to its
self-weight. After the preloading stage, the model jack-up should be free to move in any
direction.
These requirements necessitate the rig to be
1. suspended above the soil surface during centrifuge spin-up,
2. lowered onto the soil in flight at a controlled rate,
3. penetrated into the soil beyond its self-weight to a target vertical preload,
applied through the system’s centre of gravity, and
4. free to sit under its self-weight after the preloading stage, i.e. with no
additional vertical loading and free to move in any direction.

Chapter 6
6.16
For the experimental set-up to meet these requirements, a rod with top and bottom
loading platens was employed for the installation and preloading phase. This
arrangement is rigidly connected to an actuator controlling vertical movement as shown
in Figures 6.3 and 6.6. The 10 mm diameter rod runs through a 50 mm diameter hole in
the hull. The distance between the two platens is 70 mm, whereas the hull thickness is
32 mm, allowing for significant freedom of movement of the model jack-up during the
operational phase.
Suspension platen
Preloading platen
Figure 6.6. Suspension/preloading arrangement.
Before installation, the model jack-up rests on the bottom platen, suspended above the
soil surface. The actuator then lowers the structure onto the soil. In the experiments
discussed in this paper, the spudcans were installed at 0.02 m/s. However, this is not
believed to be critical as the tests were performed on dry sand. The bottom platen is

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.17
chamfered where facing the hull to ensure the jack-up spudcans ‘land’ on the sand at
their target positions. Assuming a perfectly level soil surface, identical density and soil
stress fields, each of the three spudcans should penetrate evenly under the rig’s self-
weight as the loading rod travels through the hull. Vertical preload is then applied by the
top loading platen through the jack-up’s centre of gravity. After reaching the target
preload, the rod is retracted such that the model jack-up sits freely on the soil sample
under its self-weight.
6.3.2 Horizontal loading
Environmental loading on a jack-up due to wind, waves and current is complex in
nature. As a first step, for this series of tests it was decided to simplify the loading
regime to a quasistatic monotonically increasing horizontal load applied at the hull. In
order to study the influence of a variation in loading direction, the line of action of this
load to the model jack-up’s axis of symmetry was required to vary.
A pulley system as shown in Figures 6.3 and 6.7 was used to apply the horizontal load.
The motor is mounted directly onto the strongbox. The pulley system can be mounted
along the centreline of the strongbox, which achieves loading of the jack-up along its
axis of symmetry. For another loading direction discussed in this paper, the pulley was
bolted off-centre, which loaded the jack-up along the horizontal plane, at an angle of
about 22º to its axis of symmetry. The height of the pulley system is adjustable such that
it can be secured in line with the estimated position of the wire attachment point at the
hull after preload (to ensure horizontal loading).
In the experiments, the horizontal load was applied at the hull at a velocity of 0.02 m/s.
With the tests performed on dry sand this rate is not believed to be critical.

Chapter 6
6.18
Legs B, C Leg A
Hull
Frame
PulleyWire
Pulleymotor
Strongbox
Load cell
Frame
Strongbox
Pulleymotor
Pulleymotor
α = 22º
α = 0º
HullWire
Wireα = 22º
α = 0º
Pulley
Pulleyα = 22º
α = 0ºLeg A
Leg B
Leg C
Load cell
Figure 6.7. Pulley system (schematic).
6.3.3 Instrumentation of the loading apparatus
6.3.3.1 Load measurement
The vertical loading rod contains a 10 kN axial load cell, which monitors the applied
preload. It further serves as a back-up measurement, since its reading should coincide
with the sum of the axial leg strain gauges. This was found to be the case for both
experiments.

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.19
The horizontal load applied to the hull is measured by a 1 kN axial load cell inserted
into the pulley wire just before its attachment point at the hull (Figure 6.4a and b). This
mounting position was chosen so that no deductions have to be made due to (minor)
frictional losses at the pulleys. A pin joint is located between the bolt that screws into
the jack-up hull and the load cell, allowing it to swivel depending on the vertical
position of the rig to the pulley system.
However, the wire load cell measurements were found to be influenced by out-of-plane
bending. Therefore, in this paper the applied horizontal load is taken as the sum of the
horizontal footing loads. When corrected for bending, the wire load was in good
agreement with the sum of the horizontal footing loads. For future applications it is
recommended to modify the load cell attachment point such that no bending can be
introduced during the experiment.
6.3.3.2 Displacement measurement
The vertical displacement of the rod as well as the wire movement as measured through
the motor encoders were recorded in the experimental data files. The vertical actuator
displacement can also be used as a check of the platform’s vertical displacement during
the installation and preloading phase.
6.4 CENTRIFUGE TESTING
The experiments were performed at 200g in the UWA beam centrifuge, details of which
can be found in Randolph et al. (1991). It is a 1.8 m radius centrifuge with a maximum
payload of 200 kg at 200g. Details of Tests 1 and 2 are provided in Table 6.5. Although
not discussed here, experiments in both loading directions were repeated on medium

Chapter 6
6.20
dense sand, and an equivalent set of tests was performed at 1g prior to the centrifuge
experiments.
6.4.1 Test set-up
The test set-up is shown in Figures 6.3 and 6.8. A 385 mm tall and 300 mm wide frame
bolted onto the strongbox provides the mounting for the vertical actuator, from which
the model jack-up is suspended, as well as the fixed ends of all LDTs and the pulley.
The tilt sensors are mounted directly on the jack-up hull. The pulley motor is bolted
onto the strongbox outside the frame. The model jack-up legs are labelled A, B and C as
indicated in Figures 6.2, 6.4 and 6.7.
Frame
Strongbox
Vertical actuator
Model jack-up
Figure 6.8. Test set-up (in progress).
Further, as the experimental set-up extends considerably above the top of the strongbox
the frame is clad with perspex and aluminium sheets serving as a windshield against the
drag forces exerted by the air in-flight. The aluminium sheets also add stiffness to the
frame.

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.21
Ope
ratio
nal
phas
e
max
Hap
plie
d (to
tal a
t hul
l) [M
N]
20.9
5
16.7
8
σ sel
f-w
eigh
t/γR
[-]
7.29
-8.5
8
6.98
-8.3
3
V sel
f-w
eigh
t/Vpr
eloa
d [-
]
0.40
-0.5
1
0.36
-0.4
9
V pre
load
pe
r spu
dcan
[M
N]
106.
4-14
5.5
116.
9-15
8.4
Inst
alla
tion
/ pre
-load
ing
phas
e
V sel
f-w
eigh
t pe
r spu
dcan
[M
N]
49.7
-58.
5
47.6
-56.
8
Sand
rela
tive
dens
ity (D
r)
dens
e (8
4%)
dens
e (8
4%)
Hor
izon
tal
load
ing
dire
ctio
n α
(Fig
.6.2
)
0º
22º
Gra
vity
le
vel
200g
200g
Test
Pro
perti
es
Test
nam
e
Test
1
Test
2
Tab
le 6
.5.
Det
ails
of e
xper
imen
ts.

Chapter 6
6.22
The test is confined to one half of the strongbox, enabling two tests to be performed on
the same soil sample. (The two tests discussed in this paper were performed on the same
sample.) To avoid boundary effects a minimum clearance of two footing diameters
between the edge of the footings and the strongbox walls was maintained. This is
consistent with the minimum values to eliminate boundary effects proposed by
Tsukamoto (1994).
6.4.2 Soil characteristics
The tests were carried out on commercially available superfine silica sand, characterised
by 50d = 0.190 mm and a critical state friction angle cvφ = 34.9º. The maximum and
minimum dry densities are 14.88 kN/m3 and 17.95 kN/m3, respectively (Cheong 2002).
It was prepared and vibrated dry to achieve a relative density %84≈rD . The
calculation of relative density was based on the overall weight of the soil sample and its
measured volume.
A sample height of 150 mm (= 3 spudcan Ø) was chosen in order to avoid boundary
effects but also minimise the overall set-up height. The expected penetration was
limited to approximately 0.3Ø.
6.4.3 Discussion of results
The response is discussed in terms of displacements at the hull reference point { w , 2u ,
3u , ω , 2θ , 3θ } as well as footing loads {V , 2H , 3H , Q , 2M , 3M } and the load
applied through the pulley system. The sign convention adopted here is shown in
Figure 6.2. Zero vertical displacements are assumed when the spudcan tips are just
touching the soil surface. The footing loads are inferred from the leg strain gauges for
the footing load reference point (LRP, Figure 6.5).

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.23
Where resultant displacements, rotations, horizontal loads or moments are shown, the
components in the 2 and 3 directions, respectively, have been resolved to one resultant
value. That means, the resultant horizontal displacement 23
22 uuu += , for instance,
indicates the displacement magnitude in the horizontal plane but not the directionality.
The term ‘failure’ in this paper is defined as foundation failure. The jack-up cannot
resist any additional external load and displacements become excessive. Eventually, this
will lead to the rig overturning and thus losing load capacity.
6.4.3.1 Installation and preloading phase
The model jack-up, suspended above the soil surface during spin-up of the centrifuge,
was lowered onto the soil after the centrifuge had reached the target acceleration
(N = 200g). In all centrifuge tests, spudcan A touched down first, followed by spudcan
C and then B (Figures 6.9a and 6.10a). This is due to
1) minimal differences in weight distribution on the model jack-up (due to
cable routing etc.), which resulted in slight positive rotation in the 2θ
direction (by about 0.5º to 0.63º, measured by tilt sensor 1) and about 0.61º
to 0.75º in the negative 3θ direction (measured by tilt sensor 2), and
2) LDT2 exhibiting slightly more frictional resistance than LDT1 before the
sensor moved due to rotation of the jack-up in the 2θ and 3θ directions,
which caused about 0.34º to 0.36º of twist.
Further, the suspension platen that the model jack-up is resting on (until the spudcans
begin to carry the self-weight) may not be perfectly parallel to the soil surface. This may
have contributed to the rotations in the 2θ and 3θ directions.

Chapter 6
6.24
H2, u22
M2, θ2
V, w
1
Q, ωH3, u3
3
M3, θ3
Directionof pull
-20
0
20
40
60
80
100
120
140
160
-1000 -800 -600 -400 -200 0 200
Test time [s]
Vert
ical
spu
dcan
load
s V
[MN
] Spudcan A
Spudcan C
Spudcan B
Self-weight penetration
Preloading
Horizontal load application
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
-1000 -800 -600 -400 -200 0 200Test time [s]
Dis
plac
emen
ts a
t the
HR
P [m
]
Vertical displacement w
Self-weightpenetration
Platen retracting, self-righting
Preloading
Horizontal load application
Horizontal displacement u2
Horizontal displacement u3
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
-1000 -800 -600 -400 -200 0 200Test time [s]
Rot
atio
ns a
t the
HR
P [d
egre
es]
Rotation θ2
Rotation θ3
Self-weightpenetration
Platen retracting, self-righting
Preloading
Horizontal load application
Twist ω
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
0 50 100 150 200Test time [s]
Hor
izon
tal s
pudc
an lo
ad
com
pone
nts
H2,
H3 [
MN
]
Spudcan A, H2
Spudcan A, H3
Spudcan B, H2
Spudcan C, H2
Spudcan B, H3
Spudcan C, H3
-40.0
-20.0
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
0 50 100 150 200 250 300Test time [s]
Spud
can
mom
ent c
ompo
nent
sM
2, M
3 [M
Nm
]
Spudcan A, M2
Spudcan B, M2
Spudcan C, M2
Spudcan A, M3
Spudcan B, M3
Spudcan C, M3
Figures 6.9. Time history Test 1: a) vertical load, b) displacement, c) rotation and d) horizontal
load components, e) moment components during the horizontal loading phase.
After the self-weight penetration of the spudcans (Figure 6.9a, Test 1; Figure 6.10a,
Test 2), spudcans A and C experience some loss of vertical load whereas spudcan B
gradually gains some vertical load. This can be explained by self-righting of the jack-up
as the tapered suspension platen withdraws from the inside of the hull, leaving the jack-
up free to move, which results in all rotations as well as the movements measured in the
2u and 3u directions during spin-up to be released.
a)
b) c)
d) e)

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.25
-20
0
20
40
60
80
100
120
140
160
180
-1000 -800 -600 -400 -200 0 200Test time [s]
Vert
ical
spu
dcan
load
s V
[MN
] Spudcan A
Spudcan BSpudcan C
Horizontal load application
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
-1000 -800 -600 -400 -200 0 200Test time [s]
Dis
plac
emen
ts a
t the
HR
P [m
] Vertical displacement w
Horizontal displacement u2
Horizontal displacement u3
Horizontal load application
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
-1000 -800 -600 -400 -200 0 200Test time [s]
Rot
atio
ns a
t the
HR
P [d
egre
es]
Twist ω
Rotation θ2
Rotation θ3
Horizontalload application
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
0 50 100 150 200Test time [s]
Hor
izon
tal s
pudc
an lo
ad
com
pone
nts
H2,
H3 [
MN
]
Spudcan A, H2
Spudcan A, H3
Spudcan B, H2
Spudcan C, H2
Spudcan B, H3
Spudcan C, H3
-120.0-100.0-80.0-60.0-40.0-20.0
0.020.040.060.080.0
100.0120.0140.0
0 50 100 150 200Test time [s]
Spud
can
mom
ent c
ompo
nent
sM
2, M
3 [M
Nm
]
Spudcan A, M2
Spudcan A, M3
Spudcan B, M2
Spudcan B, M3
Spudcan C, M2
Spudcan C, M3
Figure 6.10. Time history Test 2: a) vertical load, b) displacement, c) rotation and d) horizontal
load components, e) moment components during the horizontal loading phase.
Upon contact of the preloading platen with the top of the hull, the vertical load on all
three footings rapidly increases. After reaching the target preload (the load loss upon
halting the preloading process is due to relaxation of the sand), the platen is withdrawn
such that once again the jack-up sits freely under its self-weight. Table 6.6 summarises
the vertical spudcan loads after the preloading phase.
a)
b) c)
d) e)
H2, u22
M2, θ2
V, w
1
Q, ωH3, u3
3
M3, θ3
Directionof pullα = 22 degs

Chapter 6
6.26
Spudcan A Spudcan B Spudcan C
Preload [MN] 145.5 106.4 123.5
Self-weight [MN] 58.5 54.5 49.7
Test 1, α = 0º
Self-weight / Preload
0.402 0.512 0.402
Preload [MN] 158.4 116.9 129.2
Self-weight [MN] 56.8 56.7 47.6
Test 2, α = 22º
Self-weight / Preload
0.359 0.485 0.368
Table 6.6. Vertical load on spudcans.
When plotted as vertical load versus penetration (Figure 6.11), the curves of Test 1 and
Test 2 are almost identical. This indicates not only a very high degree of uniformity
throughout the sand sample, but it also proves that the test set-up and procedure are
reliable and provide very good repeatability of the experiments.
0
0.5
1
1.5
2
2.5
3
0 20 40 60 80 100 120 140 160 180
Vertical spudcan load V [MN]
Vert
ical
dis
plac
emen
t w a
t the
HR
P [m
]
Spudcan A (Test 1)Spudcan A (Test 2)
Spudcan C (Test 1)
Spudcan B (Tests 1, 2)
Spudcan C (Test 2)
P1
P2
P3
Full spudcan embedment(i.e. to footing load reference point)if penetration refersto the footing
Figure 6.11. Vertical spudcan load vs penetration.
As the spudcan tips penetrate (0-1.45 m, Figure 6.11), very little axial load is picked up
due to the small bearing area. However, as the spudcans penetrate further, the shallower
angled part of the footing underside (1.45 m – 2.35 m, Figure 6.11) proceeds to make
contact with the soil, which creates a much more rapid increase in bearing area and thus

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.27
in vertical load as well. At Point P1 the spudcans bear the entire self-weight of the jack-
up. Also visible is the relaxation and the load re-distribution between the footings due to
the self-righting of the rig as discussed above. The response upon reloading (on
commencement of preloading) is very stiff with the curves re-joining the virgin
penetration line once the footings carry more than their previous highest vertical load.
Full spudcan penetration (i.e. maximum bearing area) is achieved at w = 2.35 m and
the entire footing undersides are in contact with the soil (as marked in Figure 6.11).
However, it needs to be borne in mind that the displacement recorded in the
experiments was measured at the hull reference point, not at the individual spudcans.
Visual information at this point indicated that spudcan A was indeed fully penetrated,
but spudcans B and C were seated slightly higher in the soil. This was observed in both
experiments.
After the target preload (Point P2) has been applied, the jack-up was unloaded to its
self-weight. The vertical load on the footings dropped accordingly. The horizontal
loading phase commenced at Point P3. During this stage, which is discussed in the
following sections, the forward footing A is more heavily loaded vertically then
footings B and C.
6.4.3.2 Horizontal loading (operational) phase
Results for the horizontal loading phase of the experiments are shown in Figures 6.9 and
6.10 as well as 6.14 to 6.16. The experiments were terminated when the displacements
increased significantly with virtually no increase in external load, which indicates
imminent failure.

Chapter 6
6.28
Test 1: Horizontal loading along the axis of symmetry
In Test 1, the horizontal load was applied along the axis of symmetry (along the 3 axis,
Figure 6.2). The maximum applied load measured in the experiments was 20.95 MN, at
which stage the jack-up horizontal hull displacement was 2.39 m (see also Figure 6.14
with further discussion following). When the experiment was terminated, 3.63 m of
horizontal displacement in the 3u direction, 0.68º of rotation in this plane ( 2θ ) and
0.028 m of additional vertical penetration (0.0028 spudcan diameters) were recorded, all
measured at the hull reference point (Figures 6.9b and c). The horizontal displacement
at hull level is due to horizontal spudcan displacement as well as rotation at spudcan
level being projected over the large leg length. (Figure 6.12 shows rotation but only a
minimal amount of horizontal displacement of the forward spudcan A, while the aft
spudcans B and C experienced larger horizontal displacement as well as rotation.)
C
B A
θ2
u3
Uplift
C
B
A
Greater penetration
Pull direction
a) after preload b) at maximum applied horizontal loading
Figure 6.12. Photographs of the spudcans taken in-flight during Test 1.
Displacements and rotations out of plane were negligible as expected in this symmetric
loading case: A change of 0.13 m in the 2u direction was measured while the rotation

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.29
out of plane (in the 3θ direction) remained approximately zero until shortly before the
test was terminated (Figures 6.9b and c).
The path of platform twist with applied load evolved differently (Figure 6.9c). On load
application, the platform twisted positively, with the maximum twist ω being 0.29º.
This may be influenced by the wire picking up slack, but mostly the LDTs overcoming
slight initial friction (which will be slightly different for each LDT, LDT2 being slightly
stiffer than LDT1). However, the twist reduces to about zero twist as the applied load
increases, as would be expected during a symmetrical pull. Only shortly before the test
was terminated, when 3θ picked up, does ω increase again slightly.
The horizontal pull at hull level changes the vertical loading on the footings as the
overturning motion results in a push-pull mechanism between the forward and the aft
legs, respectively, whilst also introducing 3H and 2M loading on the spudcans
(Figure 6.9). 2M moment loading is large in magnitude due to the large leg length (i.e.
lever arm with respect to the footings). The 2H and 3M reaction components are small
in comparison due to the symmetric nature of the loading. Generally speaking, the two
aft spudcans B and C behave very similarly, as would be expected under these
symmetrical loading conditions. The minor differences result from slightly different
embedment (Figure 6.12a photographic evidence, not measured) and slight splaying of
the legs.
The reason for the curves of spudcan A terminating earlier than those for spudcans B
and C in all plots of Test 1 (see Figure 6.9a and d for instance) is that Leg A
experienced significantly higher bending moments than expected, exceeding the
capacity of the bending gauges. However, as the bending moments remained well below

Chapter 6
6.30
the structural capacity of the model jack-up legs, the test proceeded. The applied
horizontal load after the strain gauges on Leg A reached their limit was estimated by
correcting the measured wire load for out-of-plane bending (Section 6.3.3.1).
Figure 6.9e shows that initially Moment ( 2M ) loading is similar on all three spudcans.
However, from as early as ≈2M 20 MNm, the response exhibited by spudcan A is
slightly stiffer than that of the other two footings. Further, it is very interesting that the
forward spudcan A continues to attract overturning moment throughout the entire test
(albeit with softening stiffness) whilst the moment load on the two aft spudcans reduces
to residual values of about 23 MNm (spudcan B) and 16 MNm (spudcan C),
respectively, after peaking at ≈2M 53-55 MNm. Experimental evidence of a single
footing on dense sand under increasing rotation at constant vertical penetration
(Gottardi et al. 1999, for instance) showed peak resistance after small rotation. This
appears to hold for spudcans B and C. However, in contrast to the single footing tests
the aft spudcans here were not forced to remain at a constant vertical penetration.
Photographs taken in-flight (Figure 6.12) showed upward movement, which will have
contributed to the loss of moment reaction due to the reduction in bearing area. At the
same time, the forward leg penetrated further under increased combined loading, which
appears to be the reason why the moment capacity kept increasing. Note that this does
not contradict the recorded vertical displacement remaining almost constant as this
measurement refers to the hull reference point where the vertical displacements of the
forward and aft legs appear to have cancelled out.
The loss of load on the aft spudcans B and C and the consequential shedding of load
onto spudcan A have brought the combined load capacity of the footing system to
exhaustion. The jack-up is unable to withstand any higher applied load but

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.31
displacements become excessive (see also Figure 6.14), indicating the system has failed.
The jack-up in this loading direction is expected to eventually overturn through lift-off
of the aft spudcans B and C. Note that a single-footing system would have failed much
earlier as loads cannot be redistributed to other footings in the system.
Test 2: Horizontal loading at α = 22º to the axis of symmetry
Test 2 was terminated at an applied resultant load of 16.74 MN, with the components in
the 3 and 2 directions calculated as being 14.84 MN and 7.74 MN, respectively. At this
point, the measured displacement components at the hull reference point were
3u = 1.90 m and 2u = 0.75 m (Figures 6.10b and 6.14), respectively, yielding a
resultant horizontal displacement of 2.04 m. In comparison, the resultant horizontal
displacement recorded for the symmetrical loading case at the same applied load was
significantly less, only 1.52 m (Figure 6.14).
Horizontal loading applied at an angle to the jack-up’s axis of symmetry introduces
combined loading in all six degrees-of-freedom in space on the spudcan footings. That
is, although the general system and footing behaviour may be similar to the symmetrical
loading case, 2H , 3M and Q (though not measured here) reaction components now
claim part of the combined load capacity. Further, the responses on spudcans B and C
are different now. However, the majority of the out-of-plane loading is carried by the
forward spudcan A (Figures 6.10d and e). While 2H increases to 4.6 MN, loading in
this degree-of-freedom on spudcan B remains negligible and spudcan C only registered
loading of up to about 1.5 MN in magnitude. Similarly, spudcan A carries more than
660% of 3M moment load compared to either footings B or C.

Chapter 6
6.32
In this loading direction, only spudcan B shows a peaked response in the 2M direction.
The magnitude of about 54 MNm is very similar to the same footing in the symmetrical
loading case. Also, the forward footing A attracts increasing moment load. However,
spudcan C exhibits different behaviour than under symmetrical load. It, too, carries
increasingly more moment loading. However, this response is much softer than on
spudcan A.
The peak and subsequent loss of 3H on spudcan B coincides with a marked change in
response visible in all curves. This coincides with heave measured at the hull reference
point (which was not observed in the symmetrical loading direction) and sudden
increase in rotation 3θ , which was approximately 0º until then.
C
B A
α = 0º
Uplift
C
B
A
Greater penetration
Pull direction α = 22º
a) after preload b) at maximum applied horizontal loading
Figure 6.13. Photographs of the spudcans taken in-flight during Test 2.
It was visually observed that during the horizontal pull phase of the experiment, the
jack-up pivoted around spudcan C while tilting in the direction of the pull. This resulted
in the forward footing A penetrating further while spudcan B showed upward
displacement (Figure 6.13). This is also indicated in the vertical load on spudcan B

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.33
tending towards 0 MN. Further, the horizontal displacement as well as the rotations
increased at an increasing rate (Figure 6.14), with the curves tending towards
asymptotic behaviour (i.e. increasing displacements at no additional applied load). This
is indicative of imminent failure. Therefore, the jack-up is not expected to be able to
withstand significantly higher external load before overturning through lift-off of
spudcan B.
Comparison of the results obtained from the two different loading directions
The experimental results can best be compared by plotting load and displacement
response against the applied horizontal load (Figures 6.14 and 6.15) or by plotting the
reactions of the respective spudcans against each other (Figure 6.16). Note that the
applied horizontal load is taken as the sum of the horizontal loads on the footings.
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
0.0 5.0 10.0 15.0 20.0 25.0Applied load [MN]
Hor
izon
tal d
ispl
acem
ent
at th
e H
RP
[m]
u2 Test 2
Resultant u Test 2
Hmax, Test 1 = 20.95 MNHmax, Test 2 = 16.74 MN
Loss ofload
u3 Test 2
u2 Test 1
u3, resultant u Test 1
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
0.0 5.0 10.0 15.0 20.0 25.0Applied load [MN]
Rot
atio
n at
the
HR
P [d
egre
es] Twist ω Test 1
Twist ω Test 2
θ2, resultant θ Test 2
θ3 Test 2
Hmax, Test 1 = 20.95 MNHmax, Test 2 = 16.74 MN
θ3 Test 1
θ2, res. θTest 1
Figure 6.14. Comparison of hull displacement response between tests.
Interestingly, the jack-up showed very similar resultant displacement magnitudes for
both loading directions until approaching failure (Figure 6.14a). However, the response
of the jack-up loaded at an angle to its axis of symmetry softened significantly at an
applied load of about 15.5 MN (Figure 6.14a). Eventually, the rig incurred a large
increase in displacement with little additional applied load. The symmetrical load case
showed similar response, indicative of imminent failure, only at about 33% higher
applied load. Hull rotation was also nearly identical for both loading directions until
a) b)

Chapter 6
6.34
approaching failure (Figure 6.14b). As expected, twist was much larger in the
unsymmetrical loading case. Its magnitude far outstripped both other rotational
directions. Again, a further, more rapid increase at little additional applied load was
observed immediately before the test was stopped.
The results of the symmetrical load case show a sudden loss of some applied load,
which is only partially regained, towards the end of the test. This is most visible in
Figure 6.14a (where it is circled). The cause of this was sand rupture at the heavily
loaded spudcan A. This was visually observed.
An important result is that a lower applied load can be withstood before the jack-up
approaches failure in the unsymmetrical loading case.
Comparison of spudcan load paths
Although the jack-up showed seemingly very similar overall behaviour in both loading
configurations (apart from the obvious difference in twist), the load histories of the
respective spudcans are different (Figure 6.15).
The vertical load history on the forward leg A was similar in both tests until
approaching failure (Figure 6.15a). The relatively small change in vertical load on
spudcan C (Test 2) indicates that this footing did not play a significant part in the push-
pull mechanism to withstand the overturning moment, but rather acted as a pivot point.
Further, the fact that spudcan B shed vertical load at a faster rate in Test 2 than in Test 1
hints that this footing experienced more negative vertical movement (heave), which is
also evident in the photos taken in-flight. The corresponding larger reduction in bearing
area accelerates the moment loss at larger applied loads (Figure 6.15c). Spudcan C (Test
2) is able to accommodate additional moment load even if its vertical reaction drops

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.35
slightly (Figures 6.10, 6.15). Since the overall vertical displacement at the hull reference
point remains virtually unchanged and is very similar to the symmetrical loading case
(Figures 6.9 and 6.10), it is assumed that spudcan A penetrates more in Test 2 than in
Test 1 to compensate for the larger heave on spudcan B.
-60.0
-40.0
-20.0
0.0
20.0
40.0
60.0
80.0
0.0 5.0 10.0 15.0 20.0 25.0Applied load [MN]
Cha
nge
in v
ertic
al s
pudc
an lo
ads
ΔV [M
N]
Spudcan A (Test 1)
Spudcan B (Test 2)
Hmax, Test 1 = 20.95 MNHmax, Test 2 = 16.74 MN
Spudcan A (Test 2)
Spudcan C (Test 2)
Spudcan C (Test 1)
Spudcan B (Test 1)0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
0.0 5.0 10.0 15.0 20.0 25.0Applied load [MN]
Res
ulta
nt h
oriz
onta
l spu
dcan
load
s H
[MN
]
Spudcan A (Test 2)
Spudcan B (Test 2)
Spudcan C(Test 1)
Hmax, Test 1 = 20.95 MNHmax, Test 2 = 16.74 MN
Spudcan C (Test 2)
Spudcan B (Test 1)
Spudcan A (Test 1)
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
180.0
0.0 5.0 10.0 15.0 20.0 25.0Applied load [MN]
Res
ulta
nt s
pudc
an m
omen
tsM
[MN
m]
Spudcan A (Test 2)
Spudcan B (Test 2)
Spudcan C (Test 2)
Hmax, Test 1 = 20.95 MNHmax, Test 2 = 16.74 MN
Spudcan A (Test 1)
Spudcan B (Test 1)
Spudcan C (Test 1)
Figure 6.15. Comparison of response: a) change of vertical load, b) resultant horizontal load, c)
resultant moment.
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
0.0 2.0 4.0 6.0 8.0Resultant horizontal spudcan loads H on B, C [MN]
Res
ulta
nt h
oriz
onta
l spu
dcan
load
s H
on
A [M
N]
Spudcan A vs Spudcan BTest 1
Spudcan A vs Spudcan C Test 1
Spudcan A vs Spudcan C Test 2
Spudcan A vs Spudcan B Test 2
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
180.0
0.0 50.0 100.0 150.0
Resultant spudcan moments M on B, C [MNm]
Res
ulta
nt s
pudc
an m
omen
tsM
on
A [M
Nm
]
Spudcan A vs Spudcan C Test 2
Spudcan A vs Spudcan B Test 2
Spudcan A vs Spudcan CTest 1
Spudcan A vs Spudcan B Test 1
Figure 6.16. Load distribution between the spudcans: a) resultant horizontal load, b) resultant
moment.
a) b)
c)
a) b)

Chapter 6
6.36
Further clues as to how the loads are shared between the spudcans are contained in
Figure 6.16. Initially, all three spudcans share horizontal and moment load evenly (with
the black dotted line indicating even load distribution). However, already very early in
the horizontal load phase moment load is shed from spudcans B and C onto A
(Figure 6.16c). In the symmetric loading case this load transferral is very similar on
both aft footings, as expected. This process accelerates as the bearing area on footings B
and C reduces due to decreasing vertical penetration (i.e. heaving). When loading the
jack-up at an angle to its axis of symmetry, however, in the later stage of the push-over
slightly more moment is attracted by spudcan C (but not as much as on spudcan A),
while spudcan B sheds moment load at an increasing rate. During the entire experiment,
in the symmetric loading configuration all three spudcans carry even horizontal loads
(Figure 6.16b). In Test 2, on the other hand, only spudcans A and B share the horizontal
load evenly. Spudcan C deviates from equal load distribution very early on. Its
horizontal reaction increases at only about half the rate of spudcan A. Increasingly rapid
re-distribution of horizontal and moment loads between the three spudcans is evident
especially in Test 2 as the rig approaches failure (Figures 6.15b, c and 6.16).
Therefore, although the behaviour of the jack-up when expressed as overall
displacements and rotations seemed rather similar until the rig neared failure (apart from
the hull twist), the individual footing load histories differed significantly. This led to the
jack-up approaching failure at significantly less external load when the load acted at an
angle to its axis of symmetry. This highlights that the symmetric loading direction may
not always be critical, and analysing a jack-up’s capacity in this loading direction alone,
which allows for simplification to plane frame analysis, may not be conservative.

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.37
6.5 CONCLUSION
This paper has detailed the development of a generic jack-up model and loading
apparatus for experimentation in a geotechnical centrifuge, such that the unit can be
tested at stress levels corresponding to those experienced by the prototype. This is
particularly important for experiments on sand due to its stress-dependent behaviour.
Emphasis was placed on detailing the scaling law considerations arising through the size
of the model. The experimental set-up allows horizontal loading to be applied not only
along the rig’s axis of symmetry’ but also at an angle to it, enabling studies of jack-up
behaviour under general combined loading in space. The results will be used to validate
a force-resultant plasticity footing model for load paths relevant to jack-up footings.
The experimental results show very good repeatability. In this paper, the results of two
tests of different orientations of the model jack-up to the applied horizontal load were
discussed. In one of the experiments the jack-up was horizontally loaded along its axis
of symmetry (Test 1), whereas in the other the load was applied at an angle to it (Test
2). Although the overall vertical displacements as well as the resultant horizontal
displacements and rotations were very similar for both loading direction until the jack-
up approached foundation failure, the load paths of the individual footings were shown
to differ significantly, eventually leading to different modes of failure. This highlights
the importance of a footing model capable of predicting the load-displacement path of
each of the footings for the prediction of the overall system response.
The different footing load paths led to the jack-up failing at lower external load in the
orientation of Test 2 than when loaded symmetrically. This suggests that the symmetric
orientation does not always represent the critical case and plane frame (2D) analysis

Chapter 6
6.38
may not be conservative. This emphasises the importance of three-dimensional
modelling.
6.6 REFERENCES
Bienen, B., Byrne, B., Houlsby, G.T. & Cassidy, M.J. (2006). Investigating six degree-of-freedom loading of shallow foundations on sand. Géotechnique, Vol. 56, No. 6, pp. 367-379.
Bienen, B., Gaudin, C. & Cassidy, M.J. (2007). Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading. International Journal of Physical Modelling in Geotechnics, accepted April 2007.
Butterfield, R., Houlsby, G.T. & Gottardi, G. (1997). Standardized sign conventions and notation for generally loaded foundations. Géotechnique, Vol. 47, No. 4, pp. 1051-1054; corrigendum Vol. 48, No. 1, p. 157.
Byron-Brown, J. (2004). Development of a scaled three legged jack-up model. Honours thesis, University of Western Australia.
Byrne, B.W. & Houlsby, G.T. (2001). Observations of footing behaviour on loose carbonate sands. Géotechnique, Vol. 51, No. 5, pp. 463-466.
Cassidy, M.J. (2007). Experimental observations of the combined loading behaviour of circular footings on loose silica sand. Géotechnique, in press.
Cassidy, M.J. & Cheong, J. (2005). The behaviour of circular footings on sand subjected to combined vertical-torsion loading. International Journal of Physical Modelling in Geotechnics, Vol. 5, No. 4, pp. 1–14.
Cassidy, M.J., Byrne, B.W. & Houlsby, G.T. (2002). Modelling the behaviour of circular footings under combined loading on loose carbonate sand. Géotechnique, Vol. 52, No. 10, pp. 705-712.
Cassidy, M.J., Martin, C.M. & Houlsby, G.T. (2004). Development and application of force resultant models describing jack-up foundation behaviour. Marine Structures, Vol. 17, pp. 165-193.
Cheong, J. (2002). Physical testing of jack-up footings on sand subjected to torsion. Honours thesis, University of Western Australia.
Dean, E.T.R., Hsu, Y., Schofield, A.N., Murff, J.D. & Wong, P.C. (1995). Centrifuge modelling of 3-leg jackups with non-skirted and skirted spudcans on partially drained sand. Offshore Technology Conference (OTC), Houston, Texas, OTC 7839.
Dean, E.T.R., James, R.G., Schofield, A.N. & Tsukamoto, Y. (1996). Drum centrifuge study of three-leg jackup models on clay. CEUD/D-Soils/TR289.
ENSCO (2006). Available from http://www.enscous.com/. [Accessed July 2006].
Friede and Goldman (2006). Available from http://www.fng.com/. [Accessed July 2006].
GolbalSantaFe (2006). Available from http://www.globalsantafe.com/. [Accessed July 2006].
Gottardi, G., Houlsby, G.T. & Butterfield, R. (1999). Plastic response of circular footings on sand under general planar loading. Géotechnique, Vol. 49, No. 4, pp. 453-469.

Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge
6.39
Houlsby, G.T. & Cassidy, M.J. (2002). A plasticity model for the behaviour of footings on sand under combined loading. Géotechnique, Vol. 52, No. 2, pp. 117-129.
Hsu, Y.S. (1998). Excess pore pressure under cyclically loaded model jack-up foundations. PhD thesis, Cambridge University.
Hunt, R.J. & Marsh, P.D. (2004). Opportunities to improve the operational and technical management of jack-up deployments. Marine Structures, Vol. 17, No. 3-4, pp. 261-273.
Martin, C.M. (1994). Physical and numerical modelling of offshore foundations under combined loads. DPhil. thesis, University of Oxford.
Martin, C.M. & Houlsby, G.T. (2001). Combined loading of spudcan foundations on clay: Numerical modelling. Géotechnique, Vol. 51, No. 8, pp. 687-699.
Murff, J.D., Hamilton, J.M., Dean, E.T.R., James, R.G., Kusakabe, O. & Schofield, A.N. (1991). Centrifuge testing of foundation behaviour using full jack-up rig models. Offshore Technology Conference (OTC), Houston, Texas, OTC 6516.
Murff, J.D., Prins, M.D., Dean, E.T.R., James, R.G. & Schofield, A.N. (1992). Jackup rig foundation modelling. Offshore Technology Conference (OTC), Houston, Texas, OTC 6807.
NOBLE (2006). Available from http://www.noblecorp.com/. [Accessed July 2006].
Nova, R. & Montrasio, L. (1991). Settlements of shallow foundations on sand. Géotechnique, Vol. 41, No. 2, pp. 243-256.
Randolph, M.F., Jewell, R.J., Stone, K.J.L. & Brown, T.A. (1991). Establishing a new centrifuge facility. In Centrifuge 91 (Eds. Ko, H.Y. & McLean, F.), Balkema, Rotterdam, pp. 2-9.
Reardon, M.J. (1986). Review of the geotechnical aspects of jack-up unit operations. Ground Engineering, Vol. 19, No. 7, pp. 21-26.
Schotman, G.J.M. (1989). The effects of displacements on the stability of jackup spudcan foundations. Offshore Technology Conference (OTC), Houston, Texas, OTC 6026.
Spidsøe, N. & Karunakaran, D. (1996). Nonlinear behaviour of jack-up platforms. Marine Structures, Vol. 9, No. 1, pp. 71-100.
Tan, F.S.C. (1990). Centrifuge and theoretical modelling of conical footings on sand. PhD thesis, Cambridge University.
Tsukamoto, Y. (1994). Drum centrifuge tests of three-leg jack-ups on sand. PhD thesis, Cambridge University.
Vlahos, G. (2004). Physical and numerical modelling of a three-legged jack-up structure on clay soil. PhD Thesis, University of Western Australia.
Vlahos, G., Martin, C.M., Prior, M.S. & Cassidy, M.J. (2005). Development of a model jack-up unit for the study of soil-structure interaction on clay. International Journal of Physical Modelling in Geotechnics, Vol. 5, No. 2, pp. 31-48.

Chapter 6
6.40

CHAPTER 7
7.1
THREE-DIMENSIONAL NUMERICAL ANALYSIS OF CENTRIFUGE EXPERIMENTS ON A MODEL JACK-UP
DRILLING RIG ON SAND
ABSTRACT
Jack-up drilling rigs are founded on usually three shallow footings. Under wind, wave
and current loading offshore, the footings of these tall multi-footing systems transfer
large moment loads in addition to self-weight, horizontal load and even torsion to the
underlying soil. In order to be able to deploy a jack-up safely at a particular site
offshore, the unit’s capacity to withstand a 50-year return period storm is required to be
checked (SNAME 2002). As the overall system behaviour is influenced significantly by
the footing restraint, models that account correctly for the complex non-linear
foundation-soil interaction behaviour are required to be integrated with the structural
and loading models. Displacement-hardening plasticity theory has been suggested as an
appropriate framework to formulate force–resultant models to predict shallow
foundation behaviour. Recent research has extended such a model to account for six
degree-of-freedom loading of circular footings on sand (Bienen et al. 2006, 2007b).
This model has been integrated within a three-dimensional fluid-structure-soil analysis
program (Bienen & Cassidy 2006). This paper uses the results of experiments on a
model jack-up in a geotechnical centrifuge to critically evaluate the performance of (i)
this footing model and (ii) the integrated modelling technique. The numerical
simulations are shown to provide reasonably good, but slightly conservative predictions

Chapter 7
7.2
of the experimentally measured behaviour. Although first yield occurred earlier, the
combined load capacity at failure was shown to be larger than predicted using the
currently recommended footing model parameters.
7.1 INTRODUCTION
Due to their comparatively simple and economic installation, the majority of offshore
drilling in water depths up to 130 m is performed by jack-up platforms. These self-
elevating mobile units (Figure 7.1) typically consist of a buoyant triangular hull and
three trusswork legs with shallow foundations known as spudcans (Figure 7.1). These
footings are usually roughly circular in plan and conical in elevation. They can be as
large as 20 m in diameter.
Over 160m
Over 20m All dimensions approximate
Figure 7.1. Typical jack-up and spudcan (modified after Reardon 1986).
Before a jack-up is installed at a new location offshore, a site-specific assessment of its
suitability is required to be performed. For the operational phase of deployment, this
involves stability checks of the unit under 50-year storm conditions (SNAME 2002),
where in addition to its self-weight environmental loads (wind, wave and current) act on
the structure. Traditionally, these site-specific assessments have been carried out as two-

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.3
dimensional plane frame analyses assuming loading along the ‘axis of symmetry’.
However, under any of the following conditions it is important to perform these
numerical predictions in three-dimensional space:
• The environmental loading not being collinear with the ‘axis of symmetry’,
• wind and wave loading acting in different directions, and
• the rig not being symmetric (for instance when facilities on the topside like
drilling equipment, quarters and the helipad are not evenly distributed with
respect to the rig’s ‘axis of symmetry’).
Simplification to two-dimensional analysis has been employed within the offshore
industry due to computational ease, but also because of a lack of appropriate models to
predict spudcan footing behaviour in six degree-of-freedom space. Recently, a
numerical program called SOS_3D has been introduced that enables the prediction of
jack-up behaviour in three dimensions using integrated fluid-structure-soil modelling
techniques (Bienen & Cassidy 2006). Importantly, it includes a force-resultant
displacement-hardening plasticity model to simulate foundation-soil interaction (Bienen
et al. 2006, 2007b). Representing a macroscopic approach, force-resultant models
express the behaviour of the entire foundation in terms of reaction forces and conjugate
displacements at a footing reference point. In a numerical analysis these models,
encapsulating the foundation-soil interaction in a point element, can be attached to a
structural node to achieve an integrated simulation of the system.
This paper provides a critical evaluation of the performance of the foundation-soil
interaction model in the prediction of jack-up behaviour. SOS_3D is used to perform
retrospective analyses of experimental data obtained from tests of a scaled model jack-

Chapter 7
7.4
up on sand using a geotechnical centrifuge. In these experiments the model jack-up was
monotonically pushed over until failure of the jack-up structure-soil system. Two
loading directions were investigated on a symmetric jack-up, (i) along its axis of
symmetry with one leg leeward and two legs windward (Test 1, Bienen et al. 2007a),
and (ii) at an angle of 22º from that position (Test 2, Bienen et al. 2007a). In this paper,
the experimental apparatus and procedure will only be briefly touched upon with full
details given in Bienen et al. (2007a).
Initially a class A prediction has been performed on both tests. That is, the
recommended force-resultant model parameters from previous publications were used
with a best estimate of the experimental soil friction angle. No attempt to adjust the
force-resultant model (or parameters) to the experimental conditions was made. By
doing this, the model’s performance against the experimental results could be evaluated
critically, and a thorough comparison is given in this paper.
Based on these results some suggestions for improvements in the force-resultant model
are developed. These are followed with revised retrospective numerical simulations of
the experiments. The results highlight some of the perceived advantages of the
suggested modifications.
7.2 THE ANALYSIS PROGRAM SOS_3D
The finite element program SOS_3D (Simulation of Offshore Structures in
3 Dimensions, Bienen & Cassidy 2006) integrates structural, environmental loading as
well as footing models to enable fluid–structure–soil analysis to be performed in three
dimensions. Although applicable to any offshore structure with shallow foundations it
has primarily been developed as an advanced analysis tool for the prediction of the

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.5
behaviour of mobile jack-up drilling rigs. Other applications include offshore wind
turbines.
In SOS_3D, dynamic or quasistatic simulation of a system can be performed. The
solution algorithm chosen is Newton–Raphson. The integration method implemented
for dynamic analyses is the implicit and unconditionally stable ‘Newmark constant
average acceleration’ (or Newmark 4/1=β ).
7.2.1 The structural and environmental loading models
The structural model is based on the beam-column formulation (Kassimali & Abbasnia
1991) and can be chosen to behave linearly or geometrically non-linear. The
formulation has been extended to allow for shear deformation effects to be taken into
account.
Although not used in the analyses presented in this paper, wave loading can be applied
numerically to the structure through Airy linear wave or NewWave theory (Tromans et
al. 1991) in conjunction with the extended Morison equation. Current can be
superimposed on the wave kinematics. Any other loading may be applied through point
loading on the nodes of the structural model.
7.2.2 The foundation-soil interaction model
Foundation-soil interaction plays a key role in the prediction of the overall response of
the jack-up for serviceability as well as ultimate capacity. This is because the footing
stiffness influences the system stiffness significantly and thereby the load and
displacement paths. The footing capacity and mode of failure on the other hand depend
on the path of combined loads transferred to the foundation. Therefore, accurate
modelling of the load-displacement behaviour of the footings is paramount in the

Chapter 7
7.6
simulation of jack-up response. SOS_3D incorporates force-resultant footing models
based on the displacement-hardening plasticity theory framework. This suite of models
is now known as the ISIS footing models (Houlsby 2003; Cassidy et al. 2004; Bienen et
al. 2006). The particular model used here represents six degree-of-freedom load-
displacement behaviour for flat, conical or spudcan footings on sand and has its
parameters derived from small scale laboratory and centrifuge modelling experiments
(including Bienen et al. 2006 and Bienen et al. 2007b).
Table 7.1 provides a brief overview of the footing model as understanding of its features
and parameters is crucial to the following discussion of numerical prediction of jack-up
behaviour. Being based in displacement-hardening plasticity theory it comprises a yield
surface which expands according to a hardening law, elastic behaviour within the yield
surface and a flow rule to describe the behaviour at yield. The yield surface for three
degrees-of-freedom is shown in Figure 7.2 with the sign convention for the load vector
in six degrees-of-freedom },,,,,{ 3232 MMQHHV shown in Figure 7.3. Selected sets of
previously published parameter values are provided in Table 7.2.
V
H
M/2R
Figure 7.2. Yield surface (depicted for planar loading only, after Houlsby & Cassidy 2002).

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.7
Hull reference point,hull centre of gravity
Leg A
Leg B
V, w
1
Q, ω
Leg C
H2, u22
M2, θ2
H3, u3
3
M3, θ3
Horizontal loading direction
αTest 1, α = 0 degrees
Test 2, α = 22 degrees
V, w
2R
1
Q, ω
H2, u22
M2, θ2
H3, u3
3M3, θ3
Axis of symmetry
Figure 7.3. Sign convention (after Butterfield et al. 1997) and loading directions.
7.3 JACK-UP MODEL CENTRIFUGE TESTS
7.3.1 The need for model jack-up centrifuge tests
The development and validation of the force-resultant model for shallow foundations on
sand has been supported by single footing tests (Gottardi et al. 1999; Byrne & Houlsby
1999, 2001; Cheong 2002; Byrne & Houlsby 2005; Cassidy & Cheong 2005; Bienen et
al. 2006; Bienen et al. 2007b). The load paths the footings were subjected to were
designed to obtain information on the model features, for instance swipe tests to
investigate the shape and size of the yield surface or constant vertical load tests to
determine the behaviour during yield. However, when a jack-up is subjected to
overturning loading (wind and waves) the footings follow significantly different load

Chapter 7
7.8
Model Comp.
Main Equations Constant [dimension]
Geometry R [L]
0V [F]
0h , 0m , 0q [-]
a [-]
Yield surface 2
000
232
00
22
00
3 2220
VmhR/MaH
-Vm
R/MVh
Hf ⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛==
2
002
000
32
2
00
3
2
00
2 2/2/22/⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
VqRQ
VmhRMaH
VmRM
VhH
21
21
212
0
2
0
2
21
21 1ββ
ββ
) β (β
VV -
VV
ββ) β (β
- ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⎥
⎦
⎤⎢⎣
⎡ + +
1β , 2β [-]
G [F/L2] Elasticity
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
e
e
e
e
e
e
mc
mc
q
ch
ch
v
RdRdRddududw
kkkk
kkk
kkk
GR
RdMRdM
RdQdHdHdV
3
2
3
2
3
2
3
2
222
00000000000000000
000000000
2
2/2/
2/
θθω
vk , hk , ck , qk , mk [-]
k [-]
pf
=pmw pmRδ2 [L]
( )
( ) ( )m
pm
pp
pm
p
pm
pp
pm
pp
V
Rw
fRw
k
Rw
fRkw
fV 02
2
0
21
221
221
⎟⎟⎠
⎞⎜⎜⎝
⎛+−⎟
⎟⎠
⎞⎜⎜⎝
⎛−+
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛−
=
δδ
δδ
30 RNV m πγ γ= [F]
1k [F/L]
1w [L]
Hardening law
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+=
2
110
1
1
ww
ww
wkVp
p
p
2w [L]
3β , 4β [-]
Flow rule 2
000
23
2
00
2
2
00
3 2220Vmh
RMaHVmRM
VhHg
mhmh ′−⎟⎟
⎠
⎞⎜⎜⎝
⎛′
+⎟⎟⎠
⎞⎜⎜⎝
⎛′
==αααα
2
002000
32
2
00
3
2
00
2
'2/
'2/2
'2/
' ⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
VqRQ
VmhRMaH
VmRM
VhH
qmhmh ααααα
( )( )
( ) ( )
43
43
432
0
2
0
2
43
43 1ββ
ββ
ββ
ββββ
⎟⎟⎠
⎞⎜⎜⎝
⎛′
−⎟⎟⎠
⎞⎜⎜⎝
⎛′⎟
⎟⎠
⎞⎜⎜⎝
⎛ +−
+
VV
VV hα ,
mα , qα [-]
Table 7.1. Footing model features and parameters.

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.9
Explanation Notes
Footing radius For partially embedded spudcans R is defined as the radius of a cone with equivalent embedded volume as outlined in Martin (1994), Martin & Houlsby (2001).
Preload
Dimension of yield surface (horizontal, moment, torsion)
Eccentricity of yield surface
Curvature factor for yield surface (low, high stress)
The shape of the yield surface is shown in Figure 7.2. In the horizontal-moment plane it takes the shape of a rotated ellipse (Butterfield & Ticof 1979; Nova & Montrasio 1991; Gottardi & Butterfield 1993; Gottardi et al. 1999; Byrne & Houlsby 1999, 2001, 2005; Cheong 2002; Cassidy & Cheong 2005; Bienen et al. 2006).
Shear modulus
Elasticity coefficient (vertical, horizontal, horizontal/moment coupling, torsion, moment)
Within the yield surface the behaviour is modelled as entirely elastic. The representative shear modulus is evaluated as )/(/ aa ApVgpG = where pa is the atmospheric pressure and A the projected area of the spudcan underside in contact with the soil. The dimensionless constant g is called shear modulus parameter (Cassidy et al. 2004). Elasticity coefficients have been established mainly through finite element analysis (Bell 1991 and Ngo Tran 1996 for three degrees-of-freedom, Doherty & Deeks 2003 for six degrees-of-freedom).
Initial tangent stiffness
Limit factor for softening
Vertical displacement at peak vertical bearing capacity
Peak pure vertical bearing capacity
This hardening law defines the evolution of the yield surface for circular shallow footings on dense silica sand. It has been slightly modified from the formulation in Cassidy (1999). Note that the initial tangent stiffness is now non-dimensional. It was developed using the vertical load-displacement data from 1g model tests (Gottardi et al. 1999). The semi-empirical formulation takes into account the spudcan geometry and roughness as well as the sand characteristics (unit weight and friction angle).
Curve-fitting parameters
Based on small scale experiments on loose silica sand, a different hardening law was proposed (Bienen et al. 2006), as the curve at low densities does not exhibit a peak and generally follows a gentler gradient.
Curvature factor for plastic potential (low, high stress)
Association factors (horizontal, moment, torsion)
Data of small scale 1g experiments suggested flow behaviour to be non-associated, with the exception of the horizontal-moment plane (Gottardi & Butterfield 1995; Gottardi et al. 1999; Byrne & Houlsby 2001; Cassidy et al. 2002; Cassidy & Cheong 2005 and Bienen et al. 2006). However, tests at higher stress levels (vertical-torsion only) performed in a geotechnical centrifuge suggested the behaviour during yield to be far less non-associated (Bienen et al. 2007b).

Chapter 7
7.10
Cur
rent
ly re
com
men
ded
valu
es
for j
ack-
up a
naly
sis i
n 3D
0.12
2 0.
075
(1) 0
.06,
(2) 0
.024
-0
.112
0.
76
0.76
- - - - - -
0.52
0.
52
3.3
3.3
1.7
Bie
nen
et a
l. (2
007b
)
(1),
60 m
m Ø
, (2)
, 50
mm
Ø,
med
ium
den
se a
nd v
ery
dens
e si
lica
sand
, 0.
4 <
σ/γ
’R ≈
< 5
.4
- - (1
) 0.0
6, (2
) 0.0
24
- 0.
51 **
* 0.
51 **
* - - - - - -
0.51
0.
51
- - 1.7
Bie
nen
et a
l. (2
006)
(1),
150
mm
Ø,
dens
e si
lica
sand
, σ/γ’
R ≈
25
0.12
2 0.
075
0.03
3 -0
.112
0.
76 **
0.
76 **
- - -
51.2
5 [N
/mm
] 20
.5 [m
m]
8.0
[mm
] 0.
52
0.52
3.
3.
3.3
5.0
Cas
sidy
(199
9)
(1),
100
mm
Ø,
dens
e si
lica
sand
, σ/γ’
R ≈
235
0.11
6 0.
086
- (de
faul
t val
ue 0
.1)
-0.2
0.
9 *
0.99
* 0.
0316
3.
3 0.
8 (0
.999
) - - -
0.55
0.
65
2.15
2.
0 2.
0
Foot
ing
/ Pa
ram
eter
h 0
m0 q 0
a β 1
β 2
δ pm
k
****
f p k 1
w
1 w
2 β 3
β 4
αh
αm
α
q
Mod
el c
ompo
nent
Yie
ld su
rfac
e
Har
deni
ng la
w (d
ense
si
lica
sand
)
Har
deni
ng la
w (l
oose
si
lica
sand
)
Flo
w ru
le
Not
e:
σ =
V 0/(π
R2 )
(1) r
ough
flat
circ
ular
foot
ing;
(2) s
moo
th sp
udca
n
* for o
vera
ll be
st-f
it in
thre
e de
gree
-of-
free
dom
VH
M sp
ace
** fo
r ove
rall
best
-fit
in si
x de
gree
s-of
-fre
edom
**
* bes
t-fit
in V
Q sp
ace
****
this
initi
al st
iffne
ss is
dim
ensi
onle
ss a
nd n
ot th
e sa
me
as in
Cas
sidy
(199
9)
Tab
le 7
.2.
Foot
ing
mod
el p
aram
eter
val
ues.

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.11
paths than those applied in the single footing experiments. This is illustrated in
Figure 7.4.
V
H3,M2/2R
Leewardleg
Windwardlegs
V0, preloadVself-weight
Swipe test
Constant verticalload test
Yield surface created throughpreloading to V0, preload
Single footing tests
Jack-up legs
Figure 7.4. Load paths of single footing tests and jack-up legs (schematic).
As the spudcan footings are part of the jack-up structure, their response is influenced by
the rig acting as a system. With the footings attached to individual legs, each spudcan of
a jack-up system follows a different load path. Influences on the footing load paths
include the system’s geometry (leg length and spacing), the loading conditions as well
as the soil properties and footing penetration. Non-linear foundation behaviour (during
yield) can cause significant load redistribution to take place between the spudcans.
Importantly, failure as indicated in a single footing test does not necessarily imply
failure of a jack-up system with multiple spudcans. It is therefore necessary to validate
the footing model for realistic jack-up footing load paths.
For this purpose, physical experiments at a model scale are most suitable. They allow
careful control of structural, soil and loading conditions and accurate measurement of
the response (particularly when compared to the high level of uncertainty in the other
option of monitored field data). Further, model experiments allow the response of the
jack-up system to be measured to failure, obviously a situation not preferred in the field.

Chapter 7
7.12
7.3.2 Overview of the model jack-up tests retrospectively analysed
The jack-up tests used in this paper for the evaluation of model performance were
carried out on dense silica sand ( ≈rD 84%) in the University of Western Australia
beam centrifuge (Bienen et al. 2007a). The use of a geotechnical centrifuge allows the
correct scaling of stress levels experienced by the prototype, which is particularly
important for the investigation of geotechnical problems concerning sand due to its
stress-dependent dilatant nature. The model jack-up was a 1:200 scale version of a
generic medium sized prototype jack-up. Accordingly the jack-up was tested in the
centrifuge at an acceleration 200 times that of Earth’s gravity (200g). The centrifuge
technique provides confidence in the applicability and scalability of the experimental
response to the prototype jack-up condition. Further detailed explanation of the
experiments and scaling laws can be found in Bienen et al. (2007a).
7.3.2.1 Testing procedure
In these experiments, the model jack-up (Figure 7.5) was installed and vertically
preloaded to about twice its self-weight. This follows typical field practice. The
installation and preloading took place ‘in flight’ (i.e. at 200g).
Monotonically increasing quasi-static horizontal load was then applied at the hull via a
pulley mechanism (Figure 7.5). The experimental set-up allows this horizontal load to
be applied along the model rig’s axis of symmetry or at an angle to it (the two loading
directions discussed in this paper as indicated in Figure 7.3). Of course, a monotonically
increasing quasi-static horizontal point load does not exactly reflect environmental
loading that is distributed along the legs (and hull) of a field jack-up. However, it does
introduce loading in all six degrees-of-freedom to the jack-up system whilst minimising
the complexity of load application control and interpretation of the resulting data. The

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.13
use of a monotonically increasing pushover is important, as this is the typical procedure
followed numerically during a site-specific investigation (though with distributed
environmental loads, SNAME 2002). This allows the foundation model and integrated
analysis technique to be evaluated for the type of analysis it would usually be used for
in the offshore industry.
Jack-up hull
Pulley, horizontal load
Leg ALeg BLeg C
Vertical preload
Figure 7.5. Model jack-up and instrumentation.
7.3.2.2 Measured loads and displacements
From the strain gauges on each of the jack-up’s legs, load components in the V , 2H ,
3H , 2M and 3M directions could be inferred for the spudcan load reference point
(Figure 7.6), leaving torsion the only unknown. However, in order to limit
instrumentation, only system displacements and rotations relating to the hull reference
point (Figure 7.3) were measured. For more details on the instrumentation refer to

Chapter 7
7.14
Bienen et al. (2007a). It is noted here that in Test 1 the loads on spudcan A could not be
measured until the end of the test (Bienen et al. 2007a).
7.4 RETROSPECTIVE ANALYSIS OF THE JACK-UP CENTRIFUGE TESTS
The retrospective analyses of the model jack-up centrifuge experiments include the
prediction of both the installation phase and the horizontal push-over phase. In the
latter, two horizontal loading directions are considered: Loading along the axis of
symmetry (Test 1, α = 0º) and loading at an angle of 22º to it (Test 2, α = 22º). These
are depicted in Figures 7.3 and 7.6. The former is the loading situation which may be
approximated through two-dimensional analysis (if the jack-up was truly symmetric),
whereas the latter gives an indication of a more realistic loading scenario in the sense
that it involves loading in all six degrees-of-freedom on the footings.
3.9
5.0
0.91.45
1.1
Leg attachment point, load reference point
[m]
H (α = 0 degrees)H (α = 22 degrees)
27.0
25.0
V/3
V/3
V/3
H (α = 0 degrees)
H (α = 22 degrees)
67.0
22.0
89.0
Spudcan A
Spudcan B
Spudcan C
Figure 7.6. Numerical jack-up model.

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.15
The numerical discretisation of the jack-up and loading is shown in Figure 7.6 while the
properties are provided in Table 7.3.
Property Value
Leg length [m] 89.0
Centre of forward leg to centreline of aft legs [m] 25.0
Centre to centre of aft legs [m] 27.0
Maximum spudcan diameter [m] 10.0
Young’s modulus E [GPa] 200.0
Shear modulus G [GPa] 81.0
Cross-sectional area legA [m2] 2.86
Cross-sectional area hullA [m2] 30.0
Second moment of area legI [m4] 7.05
Second moment of area hullI [m4] 70.0
Table 7.3. Structural properties of jack-up.
7.4.1 Prediction with currently recommended footing model parameters
The following sections discuss the numerical results as predicted by SOS_3D when
using the currently recommended footing parameter values. This is considered to be a
class A prediction with no adjustment of model parameters from those published
previously. The footing model parameters are detailed in Table 7.2. Only the friction
angle representing the experimental condition and the soil’s unit weight have been
measured (and are discussed below).
7.4.1.1 Installation and preloading phase
Figure 7.7 shows the numerical prediction for the jack-up’s installation and preloading
phase. The vertical load measured at each of the three footings and the experimental
vertical displacement at the hull reference point are included for comparison. (The
experimental results are shown for Test 1 only for clarity, the curves for Test 2 were

Chapter 7
7.16
almost identical, Bienen et al. 2007a) The numerically predicted vertical load-
penetration curve was obtained using the hardening law for dense silica sand
(Table 7.1). The input parameters are summarised in Table 7.4. The critical state friction
angle cvφ was chosen for input here as a conservative estimate of the operative friction
angle. The unit weight of the soil was measured as part of the experimental program.
Parameter Value
Friction angle φ [º] 34.9
Soil unit weight γ [kN/m3] 17.36
Initial tangent stiffness k [-] 3.3
Factor for vertical plastic penetration at peak vertical bearing capacity pmδ [-]
0.0316
Limit factor for displacement softening pf [-] 0.999
Footing roughness φδα
tantan
= [-] 0.29
Table 7.4. Hardening law input parameters.
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.0 20.0 40.0 60.0 80.0 100.0 120.0 140.0 160.0
Vertical spudcan load V [MN]
Vert
ical
dis
plac
emen
t w a
t the
HR
P [m
]
Numerical prediction withφ = 34.9 degrees
Spudcan A (exp.)
Spudcan C (exp.)
Spudcan B (exp.)
P1
P2
P3
Spudcans B, C (SOS_3D) Spudcan A (SOS_3D)
1 2
Figure 7.7. Vertical load-penetration response and dense sand hardening law.
As soon as the spudcan tips start penetrating the soil surface, a yield surface is set up in
the force-resultant footing model. Its size corresponds to the vertical plastic penetration

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.17
and therefore expands with embedment. Initially, very little axial load was recorded or
is predicted numerically. This is due to the small bearing area of the spudcan tips (0-
1.45 m, Figure 7.7). However, the bearing area and thus the vertical load on the footing
increases rapidly when the shallower angled part of the spudcan underside proceeds to
make contact with the soil.
In the experiments there was some transitional time between self-weight penetration and
application of the preload, which led to relaxation of the soil (Point P1 in Figure 7.7).
This is not modelled numerically. Instead, the spudcans are taken directly to their target
preload (Point P2). In the footing model, the preloading process has expanded the yield
surface such that in load space (Figure 7.1) it now intersects the vertical load axis at the
preload magnitude ( 0V ). After pre-loading, the vertical load on the footings is reduced
to the jack-up’s self-weight. This is shown as Point P3. It is at this stage that horizontal
loading is applied at the hull. Its increase in magnitude alters the vertical load on the
three footings as discussed in section 7.4.1.2.
The maximum bearing area of the footings is reached on full penetration of the spudcan
underside, i.e. at w = 2.35 m footing penetration. The vertical displacement recorded in
the experiments indeed suggests full embedment. However, this measurement refers to
the hull reference point, not the individual spudcans (Bienen et al. 2007a). It was
visually observed that although spudcan A had reached full embedment, footings B and
C had penetrated slightly less (Bienen et al. 2007a). Further, in the experiments the
jack-up spudcans recorded different magnitudes of preload (reasons for which are
discussed in Bienen et al. 2007a). However, in the numerical predictions presented here
the same input parameters were assumed for all three spudcans. This includes soil
parameters and preloading level as well as footing geometry, roughness and model

Chapter 7
7.18
parameters. The vertical load magnitudes measured in the experiments as well as those
applied in the SOS_3D numerical prediction are provided in Table 7.5.
Spudcan A Spudcan B Spudcan C
Test 1, α = 0º Measured 0V [MN] 145.5 106.4 123.5
0V (SOS_3D) [MN] 123.6 123.6 123.6
Measured swV [MN] 58.5 54.5 49.7
swV (SOS_3D) [MN] 54.1 54.1 54.1
Test 2, α = 22º Measured 0V [MN] 158.4 116.9 129.2
0V (SOS_3D) [MN] 134.8 134.8 134.8
Measured swV [MN] 56.8 56.7 47.6
swV (SOS_3D) [MN] 53.7 53.7 53.7 Note: V0: preload, Vsw: vertical load just prior to application of horizontal load at the hull.
Table 7.5. Vertical spudcan loads.
Note that the numerically predicted vertical load-penetration curve is slightly stiffer
than that measured experimentally (Figure 7.7). This leads to the vertical spudcan
penetration after preload (and thus the embedded spudcan diameter) to be
underestimated. Importantly, the spudcan underside is not in full contact with the soil.
This has significant implications for the numerical predictions of the horizontal loading
phase and is discussed in the following sections.
7.4.1.2 Horizontal loading phase (operational)
7.4.1.2.1 Discussion on expected numerical response
Figure 7.8 shows schematically the load paths expected for jack-up footings if the line
of action of the horizontal load applied at the hull coincides with the axis of symmetry.
The size of the yield surface predicted by the numerical model immediately prior to the
horizontal loading phase corresponds to the applied vertical preload at the footing. The

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.19
overturning motion is resisted by a vertical push-pull mechanism between the heavily
loaded forward spudcan A and the lightly loaded aft footings B and C, in addition to
moment reactions at the footings. The applied horizontal force is equated by the sum of
the horizontal reactions of the footings. Initially, the combined load point on each of the
footings lies inside the respective yield surface and is modelled as elastic behaviour.
However, when the load magnitudes increase such that the combined load point touches
the current yield surface, it expands (or contracts) according to the hardening law. The
relative magnitudes of the load and displacement components are determined through
consistency conditions between the yield surface, hardening law and flow rule.
V
H3,M2/2R
AB, C
M2/2R
H3
B, C
M2/2R
H3
A
V0, preloadV0, yieldVself-weight
Figure 7.8. Expected load paths for loading direction of α = 0º (schematic).
One of the significant advantages of the force-resultant models is that footing yield does
not necessarily imply failure, particularly not in a multi-footing system where load can

Chapter 7
7.20
be redistributed. An increase in yield surface size, however, does not necessarily mean
larger available horizontal and/or moment load capacity. If the load combination on a
footing contains a large amount of vertical load compared to the previously applied
preload, for instance, the load path moves towards the yield surface apex, where the
cross-section in MH : space is significantly smaller than at about 0/VV = 0.5.
In a jack-up analysis, the initial predicted elastic stiffness affects the predicted load path
for the entire test. Not only does it determine the relation of the load components on a
footing while the load point lies inside the yield surface, but importantly it determines
the location of the load point when the load path touches the yield surface. This in turn
has significant influence on the magnitude of available combined load capacity in the
direction of the footing load path during yield as indicated in Figure 7.9.
V
H3,M2/2R
AB, CLower G Lower G
Figure 7.9. Influence of initial elastic assumption on the load paths (schematic).
The following sections discuss briefly the response predicted with the currently
recommended footing model parameters for dense sand for both horizontal loading
directions (Table 7.2).

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.21
7.4.1.2.2 Global response for both loading directions
Figure 7.10 shows the global response of the jack-up (expressed as horizontal hull
displacement) to the applied horizontal load (here taken as the sum of the horizontal
footing loads, Bienen et al. 2007a).
0.0
5.0
10.0
15.0
20.0
25.0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Resultant horizontal displacement at the HRP [m]
App
lied
load
[MN
]
Exp., Test 1
Exp., Test 2
SOS_3D, Test 1
SOS_3D, Test 2
Failure load Test 1
Figure 7.10. Global response during the push-over stage.
The experimental response to the applied horizontal load softens gradually rather than
suddenly as predicted by the single yield surface footing model. Further, this change
(first yield) occurred earlier in the experiments than predicted numerically, which is
why the horizontal hull displacement is underpredicted. However, the system stiffness
during yield is predicted well numerically. For both loading directions the numerical
simulation yields a conservative estimate of the failure load.
7.4.1.2.3 Test 1: Axis-symmetrical case, α = 0º
The push-over predictions of the axis-symmetric case using SOS_3D are shown against
the experimental results of Test 1 in Figures 7.11 and 7.12. As expected, the
numerically predicted curves show two distinct phases: 1) linear elastic behaviour as

Chapter 7
7.22
long as the combined load point lies within the yield surface established during preload
and 2) non-linear behaviour during yield. The numerical results confirm that the
assumed elastic stiffness provides a good, if slightly stiff, fit to the experimental curves.
It is further observed in the experimental results (Figures 7.12b and c) that the response
shows gradually decreasing stiffness, whereas the numerical curves predict a sharp,
sudden change in stiffness upon yield. This is due to the single yield surface nature of
the footing model, and could be improved if a multi-surface formulation was used.
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0Horizontal displacement u3 at the HRP [m]
Hor
izon
tal s
pudc
an lo
ad H
3 [M
N] Exp., Spudcan A
Exp. Spudcan B
Exp. Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcans B, C
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
160.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7Rotation θ2 at the HRP [degrees]
Spud
can
mom
ent M
2 [M
Nm
]
SOS_3D, Spudcans B, C
SOS_3D, Spudcan A
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
Figure 7.11. Load-displacement response Test 1, measured and predicted.
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.0 0.2 0.4 0.6 0.8 1.0V/V0 [-]
H3/V
0 [-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
SOS_3D, Spudcans B, C
SOS_3D, Spudcan A
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
0.0 0.2 0.4 0.6 0.8 1.0V/V0 [-]
M2/2
RV 0
[-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
SOS_3D, Spudcans B, C
SOS_3D, Spudcan A
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.00 0.02 0.04 0.06 0.08 0.10M2/2RV0 [-]
H3/V
0 [-]
SOS_3D, Spudcans B, C
SOS_3D, Spudcan A
Exp., Spudcan AExp., Spudcan B
Exp., Spudcan C
Figure 7.12. Normalised response Test 1, measured and predicted.
a) b)
a) b)
c)

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.23
The monotonic increase in horizontal load during yield is predicted reasonably well on
spudcans B and C, but the numerical results show softening in the horizontal plane for
spudcan A, contrary to the experimental measurements (Figures 7.11a and 7.12a).
Throughout the entire test, but particularly in the early stages of the horizontal loading
phase ( 01.0/ 03 <VH ), the experimental response in the horizontal plane is non-linear
(Figure 7.12a), which is not reflected in the initially linear elastic predicted behaviour in
the numerical footing model.
A very significant difference between the experimental and numerical results is the
moment behaviour during yield. In the physical test, the moment load on the forward
footing A kept increasing with increasing applied horizontal load at the hull
(Figures 7.11b, 7.12b and c). In the numerical prediction, however, moment load is shed
on all three spudcans from the point of first yield. Due to the magnitude of vertical load
during yield (increased since preloading on spudcan A, decreased on B and C), the
respective current footing load point lies in a smaller cross-sectional area ( MH :
plane) of the yield surface. The yield surface does not expand enough to create
additional capacity in the moment direction (cf. Figure 7.8).
Further, the underestimated vertical penetration after preload implied a smaller
embedded footing diameter (than the full spudcan diameter). This results in an
underprediction of the footing resistance, particularly during yield when spudcans B and
C experience upward vertical movement (heave) leading to the moment load on those
footings being shed even faster.
The class A numerical results provide a reasonably good prediction of the experimental
results. The numerical response is conservative as it predicts lower system capacity
(failing at 11.2 MN of applied horizontal load at the hull) than measured experimentally

Chapter 7
7.24
(20.95 MN). The performance of the footing model is analysed in more detail and
possible improvements are explored in Section 7.4.2.
7.4.1.2.4 Test 2: Unsymmetrical case, loading direction α = 22º
In Test 2, the model jack-up was loaded horizontally at an angle of α = 22º to the axis
of symmetry (Figures 7.3 and 7.6). The results of the numerical simulation are provided
in Figures 7.13 and 7.14. The footing model parameters as assumed for this prediction
are again as outlined in Table 7.2.
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
-0.5 0.0 0.5 1.0 1.5 2.0 2.5Horizontal displacement u2 at the HRP [m]
Hor
izon
tal s
pudc
an lo
ad H
2 [M
N]
Exp., Spudcan A
Exp., Spudcan BExp., Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan BSOS_3D, Spudcan C
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
-0.5 0.0 0.5 1.0 1.5 2.0 2.5Horizontal displacement u3 at the HRP [m]
Hor
izon
tal s
pudc
an lo
ad H
3 [M
N] Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
-0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4Rotation θ2 at the HRP [degrees]
Spud
can
mom
ent M
2 [M
Nm
]
SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
-120.0
-100.0
-80.0
-60.0
-40.0
-20.0
0.0
20.0
40.0
-0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4Rotation θ3 at the HRP [degrees]
Spud
can
mom
ent M
3 [M
Nm
]
Spudcan A
Spudcan B
Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
Figure 7.13. Load-displacement response Test 2, measured and predicted.
As observed in the experiment, footing C of the jack-up in this loading direction is
predicted to act predominantly as a pivot point rather than taking part in a push-pull
mechanism to resist the overturning load (Bienen et al. 2007a). Apart from the increase
in moment load ( 2M component) on spudcan A measured in the experiment, the
a) b)
c) d)

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.25
numerical model proves capable of predicting the general trends of the footing load
paths, distinguishing between the individual footings. This gives confidence that
reasonable predictions of jack-up response can be achieved with SOS_3D and the
currently recommended values for the footing model, not only for the symmetrical
loading case but for general combined loading in space. However, as discussed the
comparison of the numerically predicted and experimentally measured results
(Figures 7.11 to 7.14) shows room for improvement. This is analysed in detail and
suggestions are made in the following section.
-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H2/V
0 [-] Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H3/V
0 [-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan C
SOS_3D, Spudcan B
-0.07
-0.05
-0.03
-0.01
0.01
0.03
0.05
0.07
0.09
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
M2/2
RV 0
[-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
-0.07
-0.05
-0.03
-0.01
0.01
0.03
0.05
0.07
0.09
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
M3/2
RV 0
[-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.06
-0.07 -0.05 -0.03 -0.01 0.01 0.03 0.05 0.07 0.09M3/2RV0 [-]
H2/V
0 [-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.06
-0.07 -0.05 -0.03 -0.01 0.01 0.03 0.05 0.07 0.09M2/2RV0 [-]
H3/V
0 [-]
Exp., Spudcan A
Exp., Spudcan B Exp., Spudcan C
SOS_3D, Spudcan A
SOS_3D, Spudcan B
SOS_3D, Spudcan C
Figure 7.14. Normalised response Test 2, measured and predicted.
a) b)
c) d)
e) f)

Chapter 7
7.26
The numerical predictions of the failure load have shown to be conservative for both
horizontal loading directions discussed in this paper. The predicted external horizontal
load at the end of Test 2 is 6.54 MN, significantly less than the 16.74 MN measured in
the experiment.
7.4.2 Analysis of footing model performance
An analysis of the numerical predictions in light of the displacement-hardening footing
model is given in order to consider recommendations for improved simulations. It
concentrates on two areas, (i) the hardening law, and (ii) yield surface size, shape and
expansion properties.
(i) Hardening Law
The numerical predictions discussed above assume a friction angle of φ = 34.9º, the
critical state friction angle established by Cheong (2002). The operative friction angle as
back-calculated from the model jack-up experiments was considerably lower, ranging
between 28.4º and 33.0º (with 30º to 31º providing a good average). As the friction
angle has a large influence on γN , this affects the predicted bearing capacity
significantly. This is shown in Figure 7.15 where a series of numerical predictions for
different friction angles is given.
The hardening law for dense sand as in Table 7.1 exhibits a peaked response. However,
the post-peak softening cannot be traced by the numerical program since SOS_3D is
load-controlled, resulting in the analysis breaking down. Further, the vertical load-
penetration curve at such high stresses in the soil is not expected to have a peaked
shape. The hardening law as proposed initially for loose carbonate (Byrne & Houlsby
2001) and later in a similar form for loose silica sand (Table 7.1, Bienen et al. 2006)

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.27
does not predict a peak in vertical bearing capacity and is used here for revised (though
no longer class A) analyses. The parameters values chosen to fit the curve to the
experimental load-penetration measurements are given in Section 7.4.3.
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.0 50.0 100.0 150.0 200.0 250.0
Vertical spudcan load V [MN]
Vert
ical
dis
plac
emen
t w a
t the
HR
P [m
]
Hardening law withφ = 34.9 degrees
Spudcan A (exp.)
Spudcan C (exp.)
Spudcan B (exp.)
Hardening law withφ = 30.0 degrees
Hardening law withφ = 32.5 degrees
Hardening law withφ = 40.0 degrees
Empirical hardening law fit
Spudcans A, B, C(Revised prediction SOS_3D)
Figure 7.15. Vertical load-penetration response and hardening laws.
If the spudcan load-penetration curve at a certain site was actually known it could be
used directly as the hardening law in the pushover assessment. However, this will rarely
be the case. A hardening law that takes into account the soil stress level as well as the
initial sand density without requiring specific curve-fitting is therefore needed.
(ii) Yield Surface
The size and shape of the yield surface is determined by the parameters 0h , 0m and 0q
in combination with 1β , 2β and a . Figures 7.11 to 7.14 suggest first yield to have
occurred earlier in the experiments than predicted with the assumed elastic and yield
surface parameters (Table 7.2). Figures 7.12c and 7.14f highlight how dominant the
moment response was compared to the horizontal load in the early stages of the
experiment for all footings. Therefore, the yield surface size in the moment plane 0m

Chapter 7
7.28
will be more decisive for prediction of footing yield than that in the horizontal plane 0h .
The yield surface eccentricity a , another factor influencing the available capacity in the
horizontal and moment planes, will play a slightly less significant role than 0m . In the
case of spudcan A this moment dominance only weakened slightly towards the end of
the test. On footings B and C in Test 1 and spudcan B in Test 2, however, the balance
tilted towards more dominant horizontal loading at or shortly after yield, increasing the
importance of 0h in modelling these footing load paths.
Figures 7.16 and 7.17 show the experimental results in the light of the displacement-
hardening footing model, illustrating the combined load capacity predicted with the
yield surface parameters as assumed in Table 7.2. The resultant non-vertical load has
been expressed as
)2/2/(2)2/()2/()()(00
32232
0
32
0
22
0
32
0
2
mhRMHRMHa
hRM
hRM
hH
hHX −
−+++= (7.1)
Figures 7.16a and 7.17a compare the experimental results of Tests 1 and 2, respectively,
with the yield surface assuming the parameter values outlined in Table 7.2. If the yield
surface as described by those parameters was correct for the highly stressed spudcan
shaped smooth footings on dense silica sand, spudcans B and C (Test 1, Figure 7.16a)
only yielded very shortly before the jack-up reached failure in Test 1. More importantly,
however, the experimental results paths show increasing normalised load 0/VX ,
especially on spudcan A (Test 1, Figure 7.16a), beyond the normalised yield surface
established during preload. Such load combinations require significant amounts of yield
surface expansion. The experimental results for Test 2 show similar trends. The load
path of Spudcan C stopped just inside the yield surface, suggesting the entire behaviour

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.29
to be elastic, whereas spudcans B and especially A exceeded the combined load
capacity predicted by the yield surface. The latter two load paths intersect the yield
surface rather late in the horizontal loading phase of the experiment.
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
V/V0 [-]
X/V 0
[-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
Initial yield surface developed by preloadingh0 = 0.122, m0 = 0.075,β1 = β2 = 0.76, a = -0.112
V/V0 = 0.122
V/V0 = 0.3
V/V0 = 0.6
V/V0 = 0.84
V/V0 = 0.105
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.00 0.02 0.04 0.06 0.08 0.10 0.12M2/2RV0 [-]
H3/V
0 [-]
Slice of yield surfaceat V/V0 = 0.84
Slice of yield surfaceat V/V0 = 0.122
Slice of yield surfaceat V/V0 = 0.3
h0 = 0.122, m0 = 0.075β1 = β2 = 0.76,a = -0.112
V/V0 = 0.84
Exp., Spudcan A
V/V0 = 0.3
Slice of yield surfaceat V/V0 = 0.6
V/V0 = 0.6Slice of yield surfaceat V/V0 = 0.105
V/V0 = 0.105
V/V0 = 0.122Spudcan B
Exp., Spudcan C
Figure 7.16. Analysis of yield surface parameters, Test 1, α = 0º.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
X/V 0
[-]
V/V0 = 0.3V/V0 = 0.064V/V0 = 0.29 V/V0 = 0.6
V/V0 = 0.73Initial yield surface developed by preloadingh0 = 0.122, m0 = 0.075,β1 = β2 = 0.76, a = -0.112 Exp., Spudcan A
Exp., Spudcan BExp., Spudcan C
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.00 0.02 0.04 0.06 0.08 0.10 0.12M/2RV0 [-]
H/V
0 [-]
h0 = 0.122, m0 = 0.075β1 = β2 = 0.76,a = -0.112
Slice of yield surfaceat V/V0 = 0.29
V/V0 = 0.73
Exp., Spudcan A
Exp., Spudcan BV/V0 = 0.29
Slice of yield surfaceat V/V0 = 0.3
V/V0 = 0.064
V/V0 = 0.3
Slice of yield surfaceat V/V0 = 0.6
V/V0 = 0.6
Exp., Spudcan C
Slice of yield surfaceat V/V0 = 0.73
Slice of yield surfaceat V/V0 = 0.064
Figure 7.17. Analysis of yield surface parameters, Test 2, α = 22º.
Figures 7.16b and 7.17b show the experimental results and the yield surface ellipse in
the horizontal-moment plane for the end points of the three footing load paths as well as
at one arbitrarily selected point for each footing. The comparison with the yield surface
ellipses, representing slices through the yield surface at a constant 0/VV ratio, suggests
that the yield surface as defined by the selected parameters (Table 7.2) is too large
and/or not correctly shaped for 3.0/ 0 =VV compared to the load points on spudcans B
and C (for both Tests 1 and 2) as well as the load path end point of 29.0/ 0 =VV on
spudcan C (Test 2), but too small and/or not correctly shaped for all end points of the
a) b)
a) b)

Chapter 7
7.30
spudcan load paths ( 84.0/ 0 =VV ; 122.0 ; 105.0 for spudcans A; B; C of Test 1 and
73.0/ 0 =VV ; 064.0 for spudcans A; B of Test 2). For the arbitrarily selected
6.0/ 0 =VV the comparison is inconclusive as the load point of spudcan A lies inside
the yield surface in Test 1 but outside in Test 2.
In summary, this analysis suggests that the yield surface as determined by the
parameters values in Table 7.2 tends to overpredict the load capacity before first yield
occurs but to underpredict the combined load capacity (with relatively high horizontal
and moment load components, respectively) towards the apex of the yield surface. The
former influences the footing load paths as well as the points of yield. The latter,
however, has far more significant implications for the predicted overall capacity of the
jack-up system and is the reason why the previously discussed numerical simulations
indicated foundation failure well before it occurred in the experiments. Unfortunately, it
is not possible to determine from the experimental results what causes the enlarged
yield surface at high deviator loads,
• an increase in yield surface size ( 0h , 0m , 0q ), and/or
• a change in yield surface shape ( 1β , 2β , a ) and/or
• proportional hardening (i.e. plastic displacement components in all degrees-of-
freedom contributing to the hardening (increasing 0V ), not only vertical plastic
displacement).
The data base to date is inconclusive with respect to changes in yield surface size with
Tan (1990) as well as Byrne & Houlsby (2001) reporting increasing size with
overburden (i.e. increasing penetration) for medium dense silica sand and loose

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.31
carbonate sand, respectively, whilst Byrne (2000) observed decreasing size with
increasing peakVV /0 (assuming a peaked response of the vertical load-displacement
curve for the dense silica sand). No systematic change in yield surface size was seen in
the experiments by Bienen et al. (2006, 2007b) for silica sand.
Different bias of the yield surface shape in the horizontal, moment and torsional planes,
respectively, was observed by Bienen et al. (2006, 2007b) and is also visible in the
experimental results shown in Byrne & Houlsby (2005). These results suggest
1β < 2β for horizontal loading, increasing the yield surface size towards lower 0/VV ,
but 1β > 2β for moment loading, shaping the yield surface size towards higher 0/VV .
No particular bias ( 1β = 2β ) was seen in the torsional plane. However, in order to limit
footing model complexity, to date only overall best fit values have been recommended.
No attempt has been made to relate the shaping parameters 1β and 2β to the dominant
loading direction (or even more precisely, to the footing load combination).
Proportional hardening was suggested by Byrne & Houlsby (2001) based on small scale
experiments under low stresses in planar VHM space. Care should therefore be taken in
extrapolating these recommendations to large highly stressed footings. Although the
results of centrifuge experiments in the vertical-torsional plane also suggested that
hardening based on the vertical plastic penetration alone may underestimate 0V , this
influence was not seen as significant and no hardening law fit to this experimental series
was attempted (Bienen et al. 2007b).
Further experiments are therefore required to shed light on these questions, either using
the model jack-up including all footing displacements in the measurements or single

Chapter 7
7.32
footing tests prescribing load paths similar to those experienced by the jack-up
spudcans.
Without knowing the plastic displacement increments at each of the footings it is
unfortunately not possible to provide recommendations on the flow rule parameters.
However, a small sensitivity study showed that the non-association parameters hα , mα
and qα have a far less significant influence than initially thought.
7.4.3 Numerical predictions with revised footing model parameters
As a qualitative indication of what the predicted response could look like assuming a
monotonically increasing hardening law and large combined load capacity for high non-
vertical loads the following analyses were performed.
The hardening law of Table 7.1 suggested for small scale experiments on loose sand
was employed with the curve-fitting parameters chosen as
1k = -715 MN/m, 1w = -1.88 m, 2w = 1.0 m.
The parameters describing elastic behaviour were retained from the previous analyses.
The revised yield surface parameters are outlined in Table 7.6. The analysis of the class
A numerical predictions in light of the displacement-hardening footing model suggested
different parameters for each of the spudcans depending on the combination of the load
components and their respective magnitudes. However, different input for the footings
is not currently allowed for in SOS_3D. Here, the parameter values were chosen to
predominantly improve the prediction of the spudcan A load path as this was perceived
to be most influential in improving the quality of the overall prediction.

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.33
Model component Parameter Value
0h 0.07
0m 0.05 (increasing at ))/(14.0( 0VV on spudcan A)
0q 0.024
a -0.34 (Test 1), -0.44 (Test 2)
1β 0.85 (Test 1), 0.82 (Test 2)
Yield surface
2β 0.55 (Test 1), 0.58 (Test 2)
1k -715 MN/m
1w -1.88 m
Hardening law
2w 1.00 m
3β 0.52
4β 0.52
hα 3.3
mα 3.3
Flow rule
qα 1.7
Table 7.6. Footing model parameters used in revised analyses.
Figure 7.15 illustrates the improved fit of the numerically predicted vertical response to
the experimental curves of Test 7.1. The numerical results for the horizontal loading
phase obtained with the footing model parameters as summarised in Table 7.6 are
shown in Figures 7.18 (Test 1) and 7.19 (Test 2).
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
H3/V
0 [-]
Exp., Spudcan A
Spudcan B
Spudcan C
Revised predictionSOS_3D, Spudcan A
Class A predictionSOS_3D, Spudcan A
Class A predictionSOS_3D, Spudcans B, C
Revised predictionSOS_3D, Spudcans B, C
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
M2/2
RV 0
[-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
Revised predictionSOS_3D, Spudcan A
Class A predictionSOS_3D, Spudcan A
Class A predictionSOS_3D, Spudcans B, C
Revised predictionSOS_3D, Spudcans B, C
Figure 7.18. Normalised response Test 1, measured and revised predicted.
a) b)

Chapter 7
7.34
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0V/V0 [-]
Res
ulta
nt H
/V0 [
-]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
Revised predictionSOS_3D, Spudcan A
Revised predictionSOS_3D, Spudcan C
Class A predictionSOS_3D, Spudcan A
Class A predictionSOS_3D, Spudcan B
Class A predictionSOS_3D, Spudcan C
Revised predictionSOS_3D, Spudcan B
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8V/V0 [-]
Res
ulta
nt M
/2R
V 0 [-
]
Exp., Spudcan A
Exp., Spudcan B
Exp., Spudcan C
Revised predictionSOS_3D, Spudcan A
Class A predictionSOS_3D, Spudcan A
Class A predictionSOS_3D, Spudcan C
Revised predictionSOS_3D, Spudcan C
Revised predictionSOS_3D, Spudcan B
Class A predictionSOS_3D, Spudcan B
Figure 7.19. Normalised response Test 2, measured and revised predicted.
The curves show a significantly improved match with the experimental results. In
particular the increase in moment load on spudcan A upon yield is reflected now.
Importantly, the revised parameters result in the ultimate capacity (9.6 MN compared to
6.5 MN previously) to be predicted closer to the experimentally measured value
(16.7 MN, Test 2). The increased capacity in the moment direction is created not only
by a larger value of 0m , but also through the changed yield surface shape ( 1β , 2β and
a ). The yield surface shaping parameters ( 1β , 2β and a ) further altered the curvature
of the response on all three spudcans. However, the Figures illustrate that as expected
the revision of the model parameters mainly affected the moment plane while the
response in the horizontal plane remained largely unchanged.
As the parameters were selected primarily to fit the load path of spudcan A, the
predictions are expected to improve significantly if different parameter values were
chosen for the different spudcans. Applying the preload and self-weight magnitudes as
measured in the experiments is expected to further improve the predictions. However,
this is not attempted here.
a) b)

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.35
7.4.4 Discussion on suggestions to improve the footing model predictions
Although the initial class A numerical simulations showed reasonable agreement with
the experimental results, it has been shown qualitatively that improved prediction of the
footing load paths can be easily achieved. However, this should only be taken as
indicative for potential changes and a discussion of implications is given here.
The revised simulation used a hardening law that was fit to follow precisely the load-
penetration measured experimentally. This luxury is not usually available in site-
specific assessment, and therefore any improvement in bearing capacity prediction for
circular footings on sand would be beneficial.
Analysis of the experimental results in the light of the plasticity footing model
suggested the available combined load capacity to be larger than currently predicted by
the footing model. Further, improved retrospective simulations were observed with
slightly modified parameter values. However, revision of the recommended parameter
values could not be justified based only on the experimental evidence provided in these
two jack-up tests. Further experimental evidence is required to establish the link
between the many single footing experiments carried out to date to investigate the shape
and size of the yield surface and the load paths expected on jack-up spudcans.
Experimental data for this purpose could be gathered through
• single footing tests, if load paths similar to those experienced by jack-up
footings are prescribed,
• further model jack-up tests to cover more loading directions (and scenarios) if
additionally spudcan displacements and rotations are measured directly, or
• a combination of both.

Chapter 7
7.36
The experimental results could further be used to clarify if plastic displacement
components in degrees-of-freedom other than vertical play a significant role in the
increase in 0V (proportional hardening) for loading conditions experienced by jack-ups,
and improve understanding of flow behaviour for highly stressed large shallow footings
such as spudcans (see Bienen et al. 2007b for a discussion). For application on sand
these experiments should be performed in a geotechnical centrifuge to ensure similitude
of the soil stress field with the prototype.
Other suggested improvements in the force-resultant model include:
• The yield surface in the horizontal plane can be expected to be capped by
frictional sliding at low vertical load. This was also observed to apply in the
torsional plane (Cassidy & Cheong 2005; Bienen et al. 2007b). However, to date
frictional sliding at low vertical loads has not been incorporated into the
numerical footing model.
• Footing models with multiple yield surfaces (Vlahos et al. 2006, for instance)
have been shown capable of capturing the gradual change in footing stiffness
during yield. Such a model can be implemented into SOS_3D with only minor
changes to the interface and is expected to improve the prediction, especially in
the non-linear H plane.
7.5 CONCLUSION
This paper evaluated the performance of an integrated fluid-structure-soil analysis
program in predicting the load-displacement behaviour of mobile jack-up drilling rigs.
Numerical predictions were compared to experimental pushover response as measured
in beam centrifuge experiments. Particular emphasis was placed on the discussion of the

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.37
numerical results in the light of the displacement-hardening plasticity model employed
for the soil-foundation interaction component of the numerical package.
The numerical program package was shown to represent a useful tool for the prediction
of jack-up behaviour under general combined loading in three dimensions. Simulations
using the currently recommended footing model parameter values provided a reasonable
prediction of the experimental results. The numerical models were somewhat
conservative, with an underprediction of the ultimate combined load capacity of the
jack-up system. The footing model performance was analysed in detail and suggestions
for possible further improvement were made. These include limiting the yield surface at
low vertical loads in the horizontal and torsional planes by a frictional sliding line,
relating the yield surface shape to the combination of the load components and their
respective magnitudes, and introducing multiple yield surfaces. A hardening law that is
appropriate for jack-up prototype conditions but does not require specific curve-fitting
would be very beneficial to numerical simulations of such systems.
7.6 REFERENCES
Bell, R.W. (1991). The analysis of offshore foundations subjected to combined loading. M.Sc. thesis, University of Oxford.
Bienen, B., Byrne, B., Houlsby, G.T. & Cassidy, M.J. (2006). Investigating six degree-of-freedom loading of shallow foundations on sand. Géotechnique, Vol. 56, No. 6, pp. 367-379.
Bienen, B. & Cassidy, M.J. (2006). Advances in the three-dimensional fluid-structure-soil interaction analysis of offshore jack-up structures. Marine Structures, Vol. 19, No. 2-3, pp. 110-140.
Bienen, B., Cassidy, M.J. & Gaudin, C. (2007a). Physical modelling of the push-over capacity of a jack-up structure on sand in the geotechnical centrifuge. Canadian Geotechnical Journal, submitted May 2007.
Bienen, B., Gaudin, C. & Cassidy, M.J. (2007b). Centrifuge tests of shallow footing behaviour on sand under combined vertical-torsional loading. International Journal of Physical Modelling in Geotechnics, accepted April 2007.
Butterfield, R., Houlsby, G.T. & Gottardi, G. (1997). Standardized sign conventions and notation for generally loaded foundations. Géotechnique, Vol. 47, No. 4, pp. 1051-1054; corrigendum Vol. 48, No. 1, p. 157.

Chapter 7
7.38
Butterfield, R. & Ticof, J. (1979). Design parameters for granular soils. Proc. 7th ECSMFE, Brighton, UK, pp. 259-261.
Byrne, B.W. (2000). Investigations of suction caissons in dense sand. DPhil. thesis, University of Oxford.
Byrne, B.W. & Houlsby, G.T. (1999). Drained behaviour of suction caisson foundations on very dense sand. Offshore Technology Conference (OTC), Houston, Texas, OTC 10994.
Byrne, B.W. & Houlsby, G.T. (2001). Observations of footing behaviour on loose carbonate sands. Géotechnique, Vol. 51, No. 5, pp 463-466.
Byrne, B.W. & Houlsby, G.T. (2005). Investigating 6 degree-of-freedom loading on shallow foundations. Proc. International Symposium on Frontiers in Offshore Geotechnics (ISFOG), Perth, pp. 477-482.
Cassidy, M.J. (1999). Non-linear analysis of jack-up structures subjected to random waves. DPhil. thesis, University of Oxford.
Cassidy, M.J., Byrne, B.W. & Houlsby, G.T. (2002). Modelling the behaviour of circular footings under combined loading on loose carbonate sand. Géotechnique, Vol. 52, No. 10, pp. 705-712.
Cassidy, M.J. & Cheong, J. (2005). The behaviour of circular footings on sand subjected to combined vertical-torsion loading. International Journal of Physical Modelling in Geotechnics, Vol. 5, No. 4, pp. 1–14.
Cassidy, M.J., Martin, C.M. & Houlsby, G.T. (2004). Development and application of force resultant models describing jack-up foundation behaviour. Marine Structures, Vol. 17, pp. 165-193.
Cheong, J. (2002). Physical testing of jack-up footings on sand subjected to torsion. Honours thesis, Centre for Offshore Foundation Systems, University of Western Australia.
Doherty, J.P. & Deeks, A.J. (2003). Elastic response of circular footings embedded in a non-homogeneous half-space. Géotechnique, Vol. 53, No. 8, pp. 703-714.
Gottardi, G. & Butterfield, R. (1993). On the bearing capacity of surface footings on sand under general planar loads. Soils and Foundations, Vol. 33, No. 3, pp. 68-79.
Gottardi, G. & Butterfield, R. (1995). The displacement of a model rigid surface on dense sand under general planar loading. Soils and Foundations, Vol. 35, No. 3, pp. 71-82.
Gottardi, G., Houlsby, G.T. & Butterfield, R. (1999). Plastic response of circular footings on sand under general planar loading. Géotechnique, Vol. 49, No. 4, pp. 453-469.
Houlsby, G.T. (2003). Modelling of shallow foundations for offshore structures. Proc. International Conference on Foundations, Dundee, Scotland.
Houlsby, G.T. & Cassidy, M.J. (2002). A plasticity model for the behaviour of footings on sand under combined loading. Géotechnique, Vol. 52, No. 2, pp. 117-129.
Kassimali, A., Abbasnia, R. (1991). Large deformation analysis of elastic space frames. Journal of Structural Engineering, ASCE, Vol. 117, No. 7, pp. 2069-2087.
Martin, C.M. (1994). Physical and numerical modelling of offshore foundations under combined loads. DPhil. thesis, University of Oxford.
Martin, C.M. & Houlsby, G.T. (2001). Combined loading of spudcan foundations on clay: Numerical modelling. Géotechnique, Vol. 51, No. 8, pp. 687-699.

Three-dimensional numerical analysis of centrifuge experiments on a model jack-up drilling rig on sand
7.39
Ngo Tran, C.L. (1996). The analysis of offshore foundations subjected to combined loading. DPhil. thesis, University of Oxford.
Nova, R. & Montrasio, L. (1991). Settlements of shallow foundations on sand. Géotechnique, Vol. 41, No. 2, pp. 243-256.
Reardon, M.J. (1986). Review of the geotechnical aspects of jack-up unit operations. Ground Engineering, Vol. 19, No. 7, pp. 21-26.
SNAME (Society of Naval Architects and Marine Engineers) (2002). Site specific assessment of mobile jack-up units, SNAME Technical and Research Bulletin 5-5A. 1st Ed., 2nd Revision, New Jersey.
Tan, F.S.C. (1990). Centrifuge and theoretical modelling of conical footings on sand. PhD thesis, Cambridge University.
Tromans, P.S., Anaturk, A.R. & Hagemeijer, P. (1991). A new model for the kinematics of large ocean waves - applications as a design wave. Proc. 1st International Offshore and Polar Engineering Conference, Edinburgh, UK, pp. 64-71.
Vlahos, G., Cassidy, M.J. & Byrne, B.W. (2006). The behaviour of spudcan footings on clay subjected to combined cyclic loading. Applied Ocean Research, Vol. 28, pp. 209–221.

Chapter 7
7.40

CHAPTER 8
8.1
CONCLUDING REMARKS
8.1 INTRODUCTION
This thesis is concerned with understanding the behaviour of jack-up drilling rigs on
sand in order to significantly advance the analysis options available for the simulation
of jack-up platforms in three dimensions. The work combines extensive experimental
work with numerical techniques to arrive at a modelling package that has been shown to
achieve good quality prediction of jack-up behaviour as measured in true scale tests of a
model rig.
This final chapter summarises the major contributions that have been made, including
the technological developments, and the main findings arising from the research. It
further provides recommendations for future research.
8.2 ORIGINAL CONTRIBUTIONS AND MAIN FINDINGS
8.2.1 Validation of force-resultant model for shallow circular foundations on
sand for six degrees-of-freedom
Force-resultant models based on displacement-hardening plasticity theory represent the
state-of-the-art for shallow foundation applications such as jack-up spudcans. Although
theoretically extended to cater for all six degrees-of-freedom in space previously, this
formulation was first experimentally validated in this thesis. The data presented in
Chapter 3 represents a comprehensive set of experimental evidence of the load-
displacement behaviour of a shallow foundation under six-degree-of-freedom loading.
The rough circular flat foundation used in the experimental work was tested on loose

Chapter 8
8.2
silica sand. The experimental data proved that as theoretically postulated, the loading
direction within the horizontal plane (and the moment plane, respectively) did not
influence the response. That is, the same maximum normalised yield surface size 0h
( 0m ) applies to both load components corresponding to the orthogonal coordinate axes
in the horizontal (moment) plane. In line with previous data obtained from experiments
investigating sub-sets of the six degree-of-freedom loading (VHM planar loading and
VQ loading, respectively), the normalised yield surface size was found to be smaller in
the moment ( 0m ) than in the horizontal plane ( 0h ) and smaller still in the torsional
plane ( 0q ). Further, the yield surface shape ( 1β and 2β ) was seen to vary slightly for
the different loading planes. In order to limit complexity of the footing model, however,
the recommended parameter values represent an overall best-fit to the experimental data
in all six degrees-of-freedom. On the loose silica sand, hardening was observed to
depend on the plastic deformation components in all six degrees-of-freedom. An
accordant hardening law was suggested and implemented into the numerical model.
Plastic flow in the torsional plane was shown to be non-associated, with the degree of
non-association qα higher than in the horizontal and moment planes, respectively.
Retrospective numerical simulation showed good agreement with the experimental
results.
8.2.2 Development of integrated three-dimensional fluid-structure-soil
analysis program
In Chapter 4 this force-resultant footing model, as well as appropriate structural and
environmental loading models, were coded to become the fluid-structure-soil interaction
analysis program SOS_3D. This FORTRAN 90 program performs integrated numerical

Concluding remarks
8.3
simulations of jack-up response in three-dimensional space. Example analyses of a
generic jack-up included quasistatic push-over analyses as well as dynamic storm
loading analyses and highlighted differences in response due to the loading direction.
Footing yield was shown to not necessarily imply failure of the whole system - only if
the applied load cannot be sustained by the interaction of the three footings does the
jack-up fail. For the example jack-up and loading conditions chosen for these analyses,
the push-over failure load was lowest for axis-symmetric loading of ‘one leg windward,
two legs leeward’ and highest for the axis-symmetric case of ‘one leg leeward, two legs
windward’, with unsymmetric loading cases falling in between. Similar trends applied
for the resultant horizontal hull displacement, resultant hull rotation and vertical hull
displacement while hull torsion was highest for intermediate unsymmetric loading
situations. Torsional load on the structure was found to be resisted, to a large degree, by
horizontal and moment response at the footing level leaving significantly less capacity
for any horizontal and / or moment loading (and vice versa). The analyses highlighted
accurate modelling of the footing load paths in all six degrees-of-freedom to be essential
for the modelling of overall system response, including permanent deformations,
ultimate capacity and mode of failure. Further, quasistatic simulations with dynamic
amplification factors might result in entirely different load paths than those tracked in
dynamic analyses, therefore the latter should be given preference.
8.2.3 Validation of force-resultant model for large highly stressed shallow
circular foundations on sand through centrifuge experiments
The development and calibration of the displacement-hardening plasticity footing model
had been predominantly based on 1g small scale low stress experiments. Hence,
applicability of the model and its parameters to highly stressed large footings such as

Chapter 8
8.4
jack-up spudcans was investigated in Chapter 5 through experiments on a circular flat
rough footing and a smooth spudcan in the centrifuge, where self-weight stresses are
correctly reproduced. These experimental results were related to the full scale prototype
situation through well established scaling laws. The tests were performed on medium
dense and very dense silica sand. No centrifuge testing had been performed previously
to investigate the displacement-hardening framework in load planes involving torsion.
Further, the majority of the information in the data base concerned the yield surface size
and shape. Therefore, the experiments performed here investigated hardening and
plastic flow as well as the yield surface in the torsional plane for true scale conditions.
The displacement-hardening framework was found to apply to highly stressed large
foundations. However, the experimental evidence highlighted the dependence of all
aspects of shallow footing behaviour on the soil stress state. Although the curves of the
1g and 200g tests showed similar features, the response at low confining stresses was
not representative of prototype behaviour. The choice of an appropriate hardening law
that accurately reflects the vertical load-displacement relation for the particular footing,
relative sand density and stress level was shown to be paramount in the prediction of
shallow footing behaviour. Although a hardening law based on plastic vertical
displacement only may slightly underpredict 0V , based on the available data the
influence of plastic deformation components in other degrees-of-freedom (here twist)
was not deemed significant enough to recommend a proportional hardening law for the
plasticity model. Contrasting to the extremely dilative response at very low confining
stresses, plastic flow behaviour at prototype stresses showed a much lower degree of
non-association. The yield surface shape was seen to consist of a curved section at high
vertical loads and a frictional sliding line at low vertical loads, which occurred at higher
normalised vertical load levels than observed in small scale 1g tests. The normalised

Concluding remarks
8.5
size of the yield surface was shown to be larger for highly stressed large footings than
previous small scale tests at 1g suggested. No systematic influence of the embedment or
preload on the maximum torsional capacity was found. Based on the experimental
evidence, new model parameter values were recommended for the application of the
footing model to highly stressed large foundations such as spudcans.
8.2.4 Investigation of spudcan load paths and jack-up system behaviour in
three dimensions through centrifuge experiments
In the single footing tests, load paths were applied that investigated the footing model
features and provided data for the model calibration. However, the model had not been
validated for the load paths relevant to multi-footing systems such as jack-ups.
Chapter 6 introduced the experimental development of a three-legged model jack-up
and loading apparatus designed to investigate a generic rig’s response. Of particular
interest were the footing load paths - under combined loading in three dimensions,
including load redistribution between the three footings. Further aims included
investigation of differences in the load-displacement response and eventually the failure
modes of the jack-up for different orientations to the applied load. The experiments
were performed on dense silica sand in a beam centrifuge at 200g. This allowed a 1:200
scale jack-up to represent true scale conditions. The model jack-up was instrumented to
measure the load components on all three legs and the overall system displacements and
rotations at the hull. The loading apparatus allowed for installation, preloading and then
horizontal load application (at the hull via a pulley system) in-flight. The set-up allowed
the applied horizontal loading direction to vary, enabling studies of jack-up behaviour
under general combined loading in space. The results of experiments in two different
loading directions were analysed. Although the overall vertical displacements as well as

Chapter 8
8.6
the resultant horizontal displacements and rotations were very similar for both loading
directions until the jack-up approached foundation failure, the load paths of the
individual footings were shown to differ significantly. The experimental results showed
that initially all three spudcans shared horizontal and moment load evenly for both
loading directions. With increasing external load, however, the heavily loaded forward
spudcan attracted more moment load than the other two spudcans. Further, this moment
load was observed to increase until failure for both loading directions discussed. During
the entire experiment, in the symmetric loading configuration all three spudcans carry
even horizontal loads. In the unsymmetric test, on the other hand, the forward and only
one of the aft spudcans shared the horizontal load evenly, with the other aft spudcan
attracting less horizontal load. This footing acted as a pivot point for the system and did
not contribute significantly to the vertical push-pull mechanism to resist overturning.
The majority of the out-of-plane loading in the unsymmetric load case was carried by
the forward spudcan. Excessive displacements with little increase in applied load
signalled imminent failure, with the jack-up expected to eventually overturn through
lift-off of the most lightly loaded aft spudcan in the unsymmetric case and both aft
spudcans in the symmetric case. The different footing load paths lead to the jack-up
failing at significantly less external load when acting at an angle to its axis of symmetry
rather than along it. (However, a single-footing system would have failed much earlier
as loads cannot be redistributed to other footings in the system.) These findings further
emphasised the importance of three-dimensional modelling as the symmetric load case
was shown to not always be critical, and analysing a jack-up’s capacity in this loading
direction alone, which allows for simplification to plane frame analysis, may not be
conservative.

Concluding remarks
8.7
8.2.5 Evaluation of performance of modelling techniques for the prediction of
jack-up behaviour
Chapter 7 evaluated the performance of the numerical analysis program SOS_3D
introduced in Chapter 4 by simulating the load-displacement behaviour of the jack-up
prototype and loading as physically modelled in Chapter 6. Particular emphasis was
placed on the discussion of the numerical results in the light of the displacement-
hardening plasticity model employed for the soil-foundation interaction component of
the numerical package. The numerically predicted curves showed initial elastic
behaviour followed by non-linear behaviour during yield. However, the experimental
response showed gradually decreasing stiffness, whereas the numerical curves predicted
a sharp, sudden change in stiffness upon yield due to the single yield surface nature of
the footing model. Contrary to the experimental observation, in the numerical
predictions moment load was shed on all three spudcans from the point of initial yield.
This was because no additional combined capacity was provided at the location of the
respective footing load point even though the yield surface was increasing in size (due
to hardening). However, apart from this difference in the development of moment load
during yield, the numerical model proved capable of predicting the general trends of the
footing load paths for both loading directions discussed, distinguishing between the
individual footings. Although the predicted jack-up response depends on all footing
model features and parameters, the non-association parameters of the flow rule were
observed to be relatively less important. The choice of a hardening law appropriate for
the footing, stresses and soil relative density, however, was reiterated to be crucial for
accurate prediction of jack-up response, as was the elastic stiffness since it determines
the location of the combined load point on the yield surface at first yield. The

Chapter 8
8.8
normalised yield surface size and shape was seen to be less influential at first yield but
very important during yield and especially towards ultimate capacity. Overall, the
numerical program package was shown to represent a useful tool for the prediction of
jack-up behaviour under general combined loading in three dimensions. The numerical
results obtained with the currently recommended values for the footing model provided
reasonably good, conservative predictions of the experimental results for both loading
conditions (especially bearing in mind that only the minority of footing model
parameter values had been shown to apply for such highly stressed large footings with
the majority being recommended on the basis of small scale model tests at 1g).
Although the combined load at first yield was found to be overpredicted with the current
model parameters, underprediction of the available load capacity during yield has far
more significant implications for the predicted ultimate capacity of the jack-up system.
8.3 RECOMMENDATIONS FOR FURTHER RESEARCH
8.3.1 Force-resultant footing model
One of the main suggestions in making the footing model more versatile, robust and
user-friendly is to develop a hardening law that does not require curve-fitting as it is not
very likely the vertical load-plastic displacement curve is available for the soil
encountered on site offshore and the spudcan used. It is desirable that the input
parameters for this hardening law are limited to soil characteristics (critical state friction
angle, soil unit weight) and initial relative density in addition to footing size and shape.
The main difficulty lies in determining the operational friction angle appropriate for the
current soil stress state (i.e. quantifying the dilatancy that adds to the critical state
friction angle). This may necessitate a series of experiments of different footing sizes on
different density sands.

Concluding remarks
8.9
The jack-up centrifuge experimental results suggested the available combined load
capacity during yield to be larger than that currently predicted by the footing model.
However, revision of the recommended parameter values could not be justified based on
the available experimental evidence. Further experimental work in this area is therefore
recommended, with detailed suggestions developed in Chapter 7.
8.3.2 Cyclic loading and partial drainage
The loading on jack-up drilling rigs in the ocean environment is cyclic in nature.
Footing models with multiple yield surfaces have been shown to be capable of capturing
hysteresis introduced by cyclic loading (Houlsby & Mortara 2004; Vlahos et al. 2006,
for instance) as well as gradual degradation of footing stiffness during yield as observed
in the jack-up centrifuge tests. Implementation of such models into SOS_3D would only
require minor changes to the interface but is expected to improve the predictive
capabilities significantly.
Although the majority of the experimental work and model development to date refers
to drained conditions, spudcan response in the field due to cyclic loading is unlikely to
be fully drained. Dean (2004) suggested an approach to incorporate these phenomena
into force-resultant footing models. However, to date no complete model applicable to
jack-up spudcans has been introduced that features these ideas or accounts for partial
drainage in any other way. This area therefore requires further research.
Results from centrifuge tests using the model jack-up developed here (with appropriate
modifications to the loading apparatus) can be used for validation of such a footing
model.

Chapter 8
8.10
8.3.3 Investigation of alternative foundation options
This thesis was concerned with jack-up rigs founded on spudcans. Alternative
foundation options that might be worth investigating include suction caissons. Although
this type of shallow foundations has recently received research attention, in particular
regarding foundation concepts for offshore wind farms, suction caissons have not been
explored as a foundation alternative for jack-ups on sand. However, a test series
performed at 1g on clay showed promising results (Vlahos et al. 2005).
8.3.4 Investigation of jack-up behaviour on clay in three dimensions
Since this thesis concentrated on jack-up behaviour on sand, investigation of jack-up
behaviour in three dimensions should be extended to clay. The model jack-up and
loading apparatus developed here can be used with minor adaptations (to cater for larger
vertical penetration) to perform equivalent experiments on clay soil. Similar to the
force-resultant model for sand described herein, a footing model for clay (of the ISIS
suite) is already implemented in the numerical package SOS_3D.
8.3.5 Increased flexibility of numerical package
It is desirable to allow for individual footing input, which at present is not catered for in
SOS_3D. The same footing geometry and roughness and, importantly, soil
characteristics, model parameters and preloading magnitudes are applied to all footings
in the system. Further preload on individual footings could be applied at their
corresponding structural nodes through SOS_3D. However, it is numerically very
challenging to apply vertical load of different magnitudes on a three-dimensional
structure which causes the footings to yield and the structure to undergo differential
settlement (and thus tilt) at every load increment. Individual footing input would allow

Concluding remarks
8.11
the jack-up spudcans to be preloaded to different target values without representing
numerical challenges. Further, different soil characteristics could be input for the
respective footings, for instance, which might be helpful in modelling field conditions.
8.4 CONCLUSION
Modelling the behaviour of offshore jack-up drilling rigs poses a variety of complex
challenges. In this thesis, complementary physical and numerical modelling has been
utilised in the development of a novel three-dimensional analysis package, providing
confidence in the predictions to be realistic for jack-up behaviour in the field.
8.5 REFERENCES
Dean, E.T.R. (2004). A spudcan foundation model with excess pore pressures. Part 1. A principle of effective loads. Marine Structures, Vol. 17, pp. 219-243.
Houlsby, G.T. & Mortara, G. (2004). A continuous hyperplasticity model for sands under cyclic loading, Proc. International Conference on Cyclic Behaviour of Soils and Liquefaction Phenomena, Bochum, Germany.
Vlahos, G., Cassidy, M.J. & Byrne, B.W. (2006). The behaviour of spudcan footings on clay subjected to combined cyclic loading. Applied Ocean Research, Vol. 28, pp. 209–221.
Vlahos, G., Cassidy, M.J. & Knowles, B. (2005). A comparative assessment of the use of spudcans and caissons as the foundations of jack-up structures. Proc. 24st International Conference on Offshore Mechanics and Arctic Engineering (OMAE), Halkidiki, Greece, OMAE2005-67090.

Chapter 8
8.12