
Thiết kế mạch giám sát đồng hồ điện công nghiệp
54
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHI ỆP i LỜI CẢM ƠN Trước tiên, chúng tôi xin gởi lời cảm ơn sâu sắc đến thầy Ths Đỗ Bình Nguyên đã tận tình hướng dẫn, góp ý và động viên tôi trong quá trình thực hiện đồ án nghiên cứu khoa học. Xin chân thành cảm ơn các quý thầy cô khoa Điện-Điện tử trường đại học Lạc Hồng cùng các bạn l ớp 08DV112 đã giúp đỡ tôi trong thời gian khóa học vừa qua. Đặc bi ệt là bạn Nguyễn Bá Cường đã giúp đỡ tôi hoàn thành việc thực hi ện đề tài này. Kế đó chúng tôi xin chân thành cảm ơn đến ban giám đốc của công ty TNHH Điện - Điện tử Nguyên Thịnh đã giúp đỡ tôi trong quá trình thực tập và thực hi ện đề tài này. Những l ời cảm ơn sau cùng xin gởi đến ba mẹ đã quan tâm, tạo điều ki ện để tôi hoàn thành tốt đồ án nghiên cứu này. Xin chân thành cảm ơn !
-
Upload
traigalang1991 -
Category
Career
-
view
206 -
download
5
Transcript of Thiết kế mạch giám sát đồng hồ điện công nghiệp

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
i
LỜI CẢM ƠN
Trước tiên, chúng tôi xin gởi lời cảm ơn sâu sắc đến thầy Ths Đỗ Bình Nguyên đã
tận tình hướng dẫn, góp ý và động viên tôi trong quá trình thực hiện đồ án nghiên cứu
khoa học.
Xin chân thành cảm ơn các quý thầy cô khoa Điện-Điện tử trường đại học Lạc Hồng
cùng các bạn lớp 08DV112 đã giúp đỡ tôi trong thời gian khóa học vừa qua. Đặc biệt là
bạn Nguyễn Bá Cường đã giúp đỡ tôi hoàn thành việc thực hiện đề tài này.
Kế đó chúng tôi xin chân thành cảm ơn đến ban giám đốc của công ty TNHH Điện -
Điện tử Nguyên Thịnh đã giúp đỡ tôi trong quá trình thực tập và thực hiện đề tài này.
Những lời cảm ơn sau cùng xin gởi đến ba mẹ đã quan tâm, tạo điều kiện để tôi hoàn
thành tốt đồ án nghiên cứu này.
Xin chân thành cảm ơn !
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
ii
Mục Lục
LỜI CẢM ƠN ...................................................................................................................... i
Mục Lục ............................................................................................................................... ii
LIỆT KÊ HÌNH VẼ ........................................................................................................... iv
LIỆT KÊ BẢNG ................................................................................................................ vi
LỜI NÓI ĐẦU ................................................................................................................... vii
CHƢƠNG 1: GIỚI THIỆU .............................................................................................. 1
1.1. Đặt vấn đề. ................................................................................................................. 1
1.2. Mục tiêu đề tài. .......................................................................................................... 2
1.3. Nội dung nghiên cứu. ................................................................................................. 3
1.4. Giới hạn đề tài. ........................................................................................................... 3
1.5. Ý nghĩa thực tiễn. ....................................................................................................... 3
CHƢƠNG 2: CƠ SỞ LÝ THUYẾT ................................................................................. 4
2.1. Giao thức MODBUS – RTU...................................................................................... 4
2.1.1, MODBUS là gì? .................................................................................................. 4
2.1.2, Nguyên tắc hoạt động của MODBUS RTU. ....................................................... 5
2.1.3, Bản đồ bộ nhớ MODBUS. .................................................................................. 6
2.1.4, Đọc và viết dữ liệu. ............................................................................................. 7
2.1.5, MODBUS chế độ RTU. ...................................................................................... 7
2.2. Chuẩn RS232. ............................................................................................................ 9
2.2.2, Những đặc điểm cần lưu ý trong chuẩn RS232. ................................................. 9
2.2.3, Các mức điện áp thường truyền. ....................................................................... 10
2.2.4, Cổng RS232 trên PC. ........................................................................................ 11
2.2.5, Truyền dữ liệu. .................................................................................................. 12
2.2.6, Mạch chuẩn giao tiếp RS232 dùng IC max232. ............................................... 13
2.3. Chuẩn RS485. .......................................................................................................... 13
2.3.1, Một số vấn đề liên quan đến chuẩn RS485. ...................................................... 14
2.3.2, Các kiểu mẫu truyền nhận trong RS485. .......................................................... 19
2.4. Kỹ thuật CRC. .......................................................................................................... 22
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
iii
2.4.1, Lý thuyết CRC. ................................................................................................. 23
2.4.2, Thuật toán CRC................................................................................................. 23
2.5. Chuẩn truyền I2C. .................................................................................................... 24
2.5.1, Các hàm thiết lập I2C. ...................................................................................... 25
2.5.2, Định dạng dữ liệu truyền.................................................................................. 26
2.5.3, Định dạng địa chỉ thiết bị. ................................................................................ 27
2.5.4, Phương thức truyền dữ liệu tới Slave................................................................ 27
2.6. Đồng hồ Selec MFM – 383. ..................................................................................... 28
2.6.1, Giới thiệu đồng hồ tủ điện đa năng Selec MFM 383. ....................................... 28
2.6.2, Thông số kỹ thuật. ............................................................................................. 29
CHƢƠNG 3 CÁC LINH KIỆN SỬ DỤNG.................................................................... 31
3.1. PIC 24FJ128GB206. ................................................................................................ 31
3.2. Reatime DS1302. ..................................................................................................... 32
3.3. MAX485. ................................................................................................................. 33
3.4. EEPROM 24LC256. ................................................................................................ 34
3.5. 74LVC1T45. ............................................................................................................ 35
3.6. Graphic LCD 128x64. .............................................................................................. 36
3.7. 74ALVC164245/SO. ............................................................................................... 38
CHƢƠNG 4 : THIẾT KẾ HỆ THỐNG ........................................................................ 40
4.1.1, Sơ đồ nguyên lý khối hiển thị. .......................................................................... 40
4.1.2, Sơ đồ nguyên lý khối lưu trữ và đồng hồ thời gian thực. ................................. 41
4.1.3, Sơ đồ nguyên lý khối giao tiếp RS485.............................................................. 42
4.1.4, Sơ đồ nguyên lý khối nguồn. ............................................................................ 43
4.2. Sơ đồ nguyên lý . ..................................................................................................... 43
4.3. Lưu đồ giải thuật. ..................................................................................................... 45
Chƣơng 5: KẾT LUẬN ................................................................................................... 46
5.1. Các điểm đạt và chưa đạt được. ............................................................................... 46
5.1.1, Các điểm đạt được............................................................................................. 46
5.1.2, Các điểm chưa đạt. ............................................................................................ 46
5.2. Hướng phát triển đề tài. ........................................................................................... 46

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
iv
LIỆT KÊ HÌNH VẼ
Hình Trang
Hình 1.1: Mạch và phần mềm đi kèm đồng hồ MFM-383 của hãng SELEC. .................. 1
Hình 1.2: Phần mềm EN-VIEW ....................................................................................... .1
Hình 1.3: Các số liệu hiển thị trên máy tính ..................................................................... .2
Hình 2.1: Khung tryền MODBUS ..................................................................................... 8
Hình 2.2: Định dạng khung truyền .................................................................................... 8
Hình 2.3: Mức giới hạn điện áp trong chuẩn RS232 ....................................................... 10
Hình 2.4: Cổng RS232 trên PC ....................................................................................... 11
Hình 2.5: Mạch chuẩn giao tiếp RS232 dùng IC Max232 .............................................. 13
Hình 2.6: Kiểu truyền cân bằng 2 dây ............................................................................ 15
Hình 2.7: Tín hiệu trên 2 dây của hệ thống cân bằng ..................................................... .15
Hình 2.8: Cặp dây xoắn trong RS485 ............................................................................. .16
Hình 2.9: Cách xác định áp kiểu chung .......................................................................... .16
Hình 2.10: Truyền RS485 khi tham chiếu với đất .......................................................... .17
Hình 2.11: Cách đặt điện trở đầu cuối RT trong RS485 ................................................ .18
Hình 2.12: Tín hiệu RS485 thu được tương ứng với 2 giá trị điện trở RT..................... .18
Hình 2.13: Phân cực cho đường truyền RS485 .............................................................. .19
Hình 2.14: Sơ đồ một phát, một nhận trong RS485 ....................................................... .19
Hình 2.15: Sơ đồ một phát, nhiều nhận trong RS485..................................................... .20
Hình 2.16: Sơ đồ sử dụng 2 bộ truyền nhận trong RS485.............................................. .20
Hình 2.17: Sơ đồ sử dụng nhiều bộ truyền nhận trong RS485 ....................................... .21
Hình 2.18: Đoạn dây rẽ nhánh trong RS485 .................................................................. .21
Hình 2.19: Một dạng kết nối đường truyền RS485 hợp lí .............................................. .22
Hình 2.20: Biểu đồ truyền một mã ASCII theo chuẩn RS485 ....................................... .22
Hình 2.21: START và STOP ........................................................................................... 26
Hình 2.22: Gửi bit định địa chỉ Slave .............................................................................. 27
Hình 2.23: Khung truyền I2C .......................................................................................... 28
Hình 2.24: Đồng hồ tủ điện đo đa năng SELEC MFM-383. ........................................... 28

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
v
Hình 2.25: Sơ đồ kết nối đồng hồ với điện áp 3 pha ...................................................... .30
Hình 2.26: Sơ đồ kết nối đồng hồ với điện áp 1 pha ....................................................... 30
Hình 3.1: PIC24FJ28GB206............................................................................................ 31
Hình 3.2: Reatime DS1302 .............................................................................................. 32
Hình 3.3: Max485 ............................................................................................................ 33
Hình 3.4: EEPROM 24LC256 ......................................................................................... 34
Hình 3.5: 74LV1T45 ...................................................................................................... .35
Hình 3.6: Graphic LCD 128x64 ...................................................................................... 36
Hình 3.7: 74LVC164245/SO ........................................................................................... 37
Hình 4.1: Sơ đồ khối mạch thiết kế ................................................................................. 39
Hình 4.2: Khối hiển thị .................................................................................................... 39
Hình 4.3: Khối lưu dữ liệu và Reatime ........................................................................... 40
Hình 4.4: Khối RS485 ..................................................................................................... 41
Hình 4.5: Khối nguồn ...................................................................................................... 42
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
vi
LIỆT KÊ BẢNG
Bảng Trang
Bảng 2.1: Bảng mã chức năng .......................................................................................... .6
Bảng 2.2: Địa chỉ bộ nhớ ................................................................................................... 6
Bảng 2.3: Bảng tóm tắt thông số của RS485 ................................................................... 14
Bảng 3.1: Chân và chức năng chân của DS1302 ............................................................. 33
Bảng 3.2: Chân và chức năng các chân của MAX485 .................................................... 33
Bảng 3.3: Chân và chức năng các chân của EEPROM 24LC256 ................................... 34
Bảng 3.4: Điều kiện để xác định input/output 74LV1T45 ............................................. .35
Bảng 3.5: Chân và chức năng các chân của 74LV1T45.................................................. 35
Bảng 3.6: Chân và chức năng các chân của GRAPHIC LCD ......................................... 36
Bảng 3.7: Chân và chức năng các chân của 74LV164245/SO ........................................ 37
Bảng 3.8: Điều kiện để xác định input/output 74LV164245/SO .................................... 37
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
vii
LỜI NÓI ĐẦU
Các công ty, xí nghiệp lớn và trung bình dù sản xuất mặt hàng nào cũng đều sử dụng
các đồng hồ điện công nghiệp để kiểm soát lượng điện sử dụng. Các đồng hồ điện sẽ được
đặt tại các phân xưởng và giá trị điện của đồng hồ sẽ được đưa về phòng giám sát để dễ
dàng cho việc kiểm tra. Ngày nay, hãng Selec đã sản xuất ra Đồng hồ tủ điện đa năng
MFM-383, đi kèm đồng hồ là module giao tiếp giữa đồng hồ và máy tính. Module này có
giá thành cao nên tôi đã quyết định nghiên cứu và thiết kế ra mạch điện thay thế có giá
thành rẻ hơn mà vẫn đáp ứng được các ứng dụng như của Selec đưa ra. Đề tài của tôi đã
được công ty TNHH Điện - Điện tử Nguyên Thịnh chấp thuận và cho tiến hành nghiên
cứu thử nghiệm tại công ty.
Trong quá trình thực hiện đề tài, do trình độ hiểu biết còn nhiều hạn chế nên đề tài còn
nhiều thiếu sót mong được sự góp ý của các thầy trong khoa. Tôi xin gửi lời cám ơn đến
các thầy trong khoa đã luôn giúp đỡ tôi trong suốt quá trình học tập tại trường đặc biệt là
thầy Th.s Đỗ Bình Nguyên đã giúp đỡ tôi trong suốt thời gian thực hiện đề tài, tôi xin
chân thành cảm ơn.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 1
CHƢƠNG 1:
GIỚI THIỆU
1.1. Đặt vấn đề.
Ngày nay đồng hồ đo điện năng cơ đã được thay thế bằng đồng hồ đo điện năng số.
Đồng hồ MFM-383 là đồng hồ đo điện số do hãng Selec sản xuất.
Hình 1.1: Mạch và phần mềm đi kèm đồng hồ MFM-383 của hãng SELEC.
Đi kèm đồng hồ là mạch giao tiếp đồng hồ và máy tính, phần mềm chuyên dụng EN-
VIEW giúp người sử dụng kiểm tra và điều khiển trực tiếp ngay trên máy tính.
Hình 1.2 : Phần mềm EN-VIEW.
Phần mềm EN-VIEW là phần mềm hỗ trợ trên máy tính để thiết lập cho đồng hồ cũng
như lấy số liệu từ đồng hồ về máy tính để giám sát. Phần mềm có các tính năng: hiển thị

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 2
số liệu từ đồng hồ về máy tính và cập nhật số liệu liên tục, mô phỏng giao diện đồng hồ
đồng hồ trên máy tính, hỗ trợ vẽ biểu đồ dạng sóng, số liệu cũ được lưu dưới dạng file
excel.
Hình 1.3: Các số liệu hiển thị trên máy tính.
Tuy có nhiều tính năng nhưng nhà sử dụng phải mất một khoản vốn đầu tư khá lớn
ban đầu. Vì vậy cần phải thiết kế một mạch điện tử sao cho vẫn đảm bảo được các tính
năng như cũ nhưng giảm chi phí đầu tư.
1.2. Mục tiêu đề tài.
Dựa trên những tìm hiểu về sản phẩm đồng hồ của hãng Selec, tôi đã quyết định thiết
kế một mạch điện có thể thay thế được máy tính và mạch giao tiếp giữa đồng hồ với máy
tính. Tôi đặt ra các mục tiêu khi nghiên cứu thiết kế mạch điện thay thế như sau:
Giao tiếp được với đồng hồ MFM-383 của hãng Selec.
Chạy ổn định, độ trễ thấp.
Số liệu nhận được hiển thị ngay trên mạch.
Mạch lưu trữ được dữ liệu trong thời gian dài và cập nhập dữ liệu mới chính xác,
nhanh chóng.
Giá thành rẻ.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 3
1.3. Nội dung nghiên cứu.
Đề tài nghiên cứu những vấn đề sau:
Giao thức Modbus – RTU.
Chuẩn giao tiếp RS485.
Chuẩn giao tiếp RS232.
Kỹ thuật CRC.
Giao thức TCP/IP, Enthernet.
Đồng hồ SELEC MFM-383.
Vi điều khiển PIC24FJ128GB206 và các module tích hợp sẵn trong vi điều khiển
PIC24FJ128GB206.
GRAPHIC LCD.
1.4. Giới hạn đề tài.
Do thời gian nghiên cứu hạn chế nên chúng tôi chỉ giới hạn đề tài trong phạm vi thu
thập và kiểm soát số liệu lấy từ đồng hồ điện. Chưa triển khai được phần lưu số liệu đồng
hồ trên mạch và truyền lên máy tính theo chuẩn Ethernet.
1.5. Ý nghĩa thực tiễn.
Đề tài giải quyết được yêu cầu thực tiễn đặt ra là giao tiếp được với đồng hồ MFM-
383 của hãng Selec và hiển thị các số liệu ngay trên mạch nên có thể thay thế được máy
tính. Mạch đạt được các ưu điểm khi ứng dụng vào thực tế là chạy ổn định trong môi
trường công nghiệp, độ trễ thấp, giá thành rẻ.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 4
CHƢƠNG 2:
CƠ SỞ LÝ THUYẾT
2.1. Giao thức MODBUS – RTU.
2.1.1, MODBUS là gì?
MODBUS do Modicon (hiện nay thuộc Schneider Electric) phát triển năm 1979, là
một phương tiện truyền thông với nhiều thiết bị thông qua một cặp dây xoắn đơn. Ban
đầu, nó hoạt động trên RS232, nhưng sau đó nó sử dụng cho cả RS485 để đạt tốc độ cao
hơn, khoảng cách dài hơn và nhiều slave trên một bus truyền. MODBUS đã nhanh chóng
trở thành tiêu chuẩn thông dụng trong ngành tự động hóa.
MODBUS là một hệ thống “Master - Slave”, Master được kết nối với một hay nhiều
Slave. Master thường là một PLC, PC, DCS, hay RTU. Slave MODBUS RTU thường là
các thiết bị hiện trường. Khi một Master MODBUS RTU muốn có thông tin từ thiết bị
Slave, Master sẽ gửi một thông điệp về dữ liệu cần, tóm tắt dò lỗi tới địa chỉ thiết bị Slave.
Mọi thiết bị khác trên mạng sẽ nhận thông điệp này nhưng chỉ có thiết bị nào được chỉ
định mới có phản ứng. Các thiết bị Slave trên mạng MODBUS không thể tạo ra kết nối,
chúng chỉ có thể phản ứng. Nói cách khác, Slave sẽ gửi data về cho Master chỉ khi Master
có yêu cầu.
Ba phiên bản MODBUS phổ biến nhất được sử dụng ngày nay là:
MODBUS ASCII.
MODBUS RTU.
MODBUS/TCP.
Tất cả thông điệp được gửi dưới cùng một format. Sự khác nhau duy nhất giữa 3 loại
MODBUS là cách thức thông điệp được mã hóa. Với MODBUS ASCII, mọi thông điệp
được mã hóa bằng hexadecimal, sử dụng đặc tính ASCII 4 bit. Đối với mỗi một byte
thông tin, cần có 2 byte truyền thông, gấp đôi so với MODBUS RTU hay MODBUS/TCP.
MODBUS ASCII chậm nhất trong 3 giao thức trên, nhưng lại thích hợp với modem điện
thoại hay kết nối sử dụng sóng radio do ASCII sử dụng các tính năng phân định thông
điệp. Do tính năng phân định này, mọi rắc rối trong phương tiện truyền dẫn sẽ không làm
thiết bị nhận dịch sai thông tin. Điều này quan trọng khi đề cập đến các modem chậm,

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 5
điện thoại di động, kết nối ồn hay các phương tiện truyền thông khó tính khác. Đối với
MODBUS-RTU, dữ liệu được mã hóa theo hệ nhị phân và chỉ cần một byte truyền thông
cho một byte dữ liệu. Đây là thiết bị lí tưởng đối với RS232 hay mạng RS485 đa điểm,
tốc độ baud từ 1200 đến 115.200. Tốc độ baud phổ biến nhất là 9600 đến 19200.
MODBUS-RTU là giao thức công nghiệp được sử dụng rộng rãi nhất. MODBUS/TCP
đơn giản là MODBUS qua Ethernet. Thiết bị Master không kết nối trực tiếp với các thiết
bị Slave, thay vào đó các địa chỉ IP được sử dụng. Với MODBUS/TCP, dữ liệu
MODBUS được tóm lược đơn giản trong một gói TCP/IP. Do đó, bất cứ mạng Ethernet
hỗ trợ MODBUS/IP sẽ có hỗ trợ MODBUS/TCP.
2.1.2, Nguyên tắc hoạt động của MODBUS RTU.
Để kết nối với Slave, Master sẽ gửi một thông điệp bao gồm các trường dữ liệu sau:
Địa chỉ thiết bị: là một con số từ 0 đến 247. Thông điệp được gửi tới địa chỉ 0
(truyền thông điệp) có thể được tất cả các thiết bị Slave chấp nhận, nhưng các
con số từ 1-247 là các địa chỉ của các thiết bị cụ thể. Một Slave luôn phản
ứng với một thông điệp MODBUS do đó Master sẽ biết rằng thông điệp đã
được nhận.
Mã chức năng: dùng để xác định yêu cầu mà Master yêu cầu Slave thực hiện
như đọc dữ liệu, chấp nhận dữ liệu, thông báo trạng thái .v.v… Mã chức năng
là từ 1 – 255. Một số mã chức năng còn có các mã chức năng phụ.
Dữ liệu: để xác định địa chỉ trong bộ nhớ thiết bị hay chứa các giá trị dữ liệu
được viết trong bộ nhớ thiết bị hay chứa các thông tin cần thiết khác mang
chức năng như yêu cầu.
Giá trị kiểm tra lỗi (CRC): là giá trị 16 bit dùng để kiểm tra lỗi trong quá trình
truyền nhận. CRC được Master tạo ra và thiết bị tiếp nhận kiểm tra. Nếu giá
trị CRC không thỏa mãn, thiết bị đòi hỏi truyền lại thông điệp này.
Khi Slave thực hiện các chức năng theo yêu cầu, nó sẽ gửi thông điệp cho Master.
Thông điệp chứa địa chỉ của Slave và mã chức năng, dữ liệu theo yêu cầu, và một giá trị
kiểm tra lỗi.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 6
Bảng 2.1: Bảng mã chức năng
Yêu cầu Mã chức năng
01 Đọc cuộn cảm
02 Đọc đầu ra rời rạc
03 Đọc bộ ghi phần
04 Đọc bộ ghi đầu vào
05 Viết cuộn cảm đơn
06 Viết bộ ghi đơn
07 Đọc trạng thái ngoại lệ
08 Chẩn đoán
…
Xx 255 mã chức năng, phụ
thuộc vào thiết bị
2.1.3, Bản đồ bộ nhớ MODBUS.
Mỗi thiết bị MODBUS có bộ nhớ chứa dữ liệu quá trình. Thông số kỹ thuật của
MODBUS chỉ ra cách dữ liệu được gọi ra như thế nào?, loại dữ liệu nào có thể được gọi
ra?. Tuy nhiên, không đặt ra giới hạn về cách thức và vị trí mà nhà cung cấp đặt dữ liệu
trong bộ nhớ.
Các đầu vào và cuộn cảm rời rạc có giá trị 1 bit, mỗi một thiết bị lại có một địa chỉ
cụ thể. Các đầu vào analog (bộ ghi đầu vào) được lưu trong bộ ghi 16 bit. Bằng cách sử
dụng hai bộ ghi này, MODBUS có thể hỗ trợ format điểm floating (nổi) IEEE 32 bit. Bộ
ghi Holding cũng sử dụng các bộ ghi bên trong 16 bit hỗ trợ điểm floating.
Dữ liệu trong bộ nhớ được xác định trong thông số kỹ thuật MODBUS. Giả sử rằng
nhà cung cấp tuân theo tiêu chuẩn kỹ thuật MODBUS (không phải tất cả), mọi dữ liệu có
thể được truy cập dễ dàng bởi Master, thiết bị Slave tuân theo các thông số kỹ thuật.
Trong nhiều trường hợp, nhà cung cấp thiết bị công bố vị trí của bộ nhớ, tạo điều kiện cho
nhân viên lập trình dễ dàng để kết nối với thiết bị tớ.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 7
Bảng 2.2 : Địa chỉ bộ nhớ
Địa chỉ Loại Tên
1 – 9999 Đọc hoặc viết Cuộn cảm
10001 – 19999 Chỉ đọc Đầu vào rời rạc
30001 – 39999 Chỉ đọc Bộ ghi đầu vào
40001 - 49999 Đọc hoặc viết Bộ ghi Holding
2.1.4, Đọc và viết dữ liệu.
MODBUS có tới 255 mã chức năng, nhưng 1 (cuộn cảm đọc), 2 (đầu vào rời rạc
đọc), 3 (bộ ghi Holding đọc), và 4 (bộ ghi đầu vào đọc) là các chức năng đọc được sử
dụng phổ biến nhất để thu thập dữ liệu từ các thiết bị Slave. Thí dụ, để đọc 3 giá trị 16 bit
dữ liệu analog từ bản đồ bộ nhớ của thiết bị 5, Master sẽ gửi một yêu cầu như sau:
Địa chỉ Mã hàm Địa chỉ khởi đầu Số lượng giá trị cần đọc Giá trị Kiểm tra lỗi
5 04 2 3 CRC
Trong đó, 5 là địa chỉ thiết bị Slave, 4 đọc bộ ghi đầu vào, 2 là địa chỉ khởi đầu (địa
chỉ 30002). 3 có nghĩa là để đọc 3 giá trị dữ liệu kề nhau xuất phát từ địa chỉ 30002, và
CRC là giá trị kiểm tra lỗi thông điệp này.
Thiết bị tớ, sau khi nhận dữ liệu này, sẽ gửi lại một trả lời như sau:
Địa chỉ Mã hàm 3 giá trị yêu cầu đọc về Giá trị Kiểm tra lỗi
5 04 aa, bb, cc CRC
Tại vị trí 5 là địa chỉ của thiết bị, 04 là yêu cầu đọc lặp, aa, bb, cc là 3 giá trị 16 bit,
CRC là giá trị kiểm tra lỗi thông điệp.
Trong hầu hết các nhà máy, các thiết bị đo hiện trường kết nối với hệ thống điều
khiển với từng cặp dây xoắn “home run”.
2.1.5, MODBUS chế độ RTU.
2.1.5.1, Chu trình yêu cầu – đáp ứng giữa Master và Slave của giao thức
Modbus.
Địa chỉ ở đây là của Slave đã thực hiện yêu cầu và gửi lại đáp ứng. Mã hàm
được giữ nguyên như trong thông báo yêu cầu và dữ liệu chứa kết quả thực hiện yêu cầu
của Master. Nếu xảy ra lỗi, mã hàm quay lại được sửa để chỉ thị đáp ứng là một thông báo

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 8
lỗi, còn dữ liệu mô tả chi tiết lỗi xảy ra. Phần kiểm lỗi giúp Master xác định độ chính xác
của nội dung thông báo nhận được.
Mã hàm
Dữ liệu
Kiểm soát lỗi
Địa chỉ thiết bị
Mã hàm
Dữ liệu
Kiểm soát lỗi
Địa chỉ thiết bị
Thông báo yêu
cầu từ trạm chủ
Thông báo yêu
cầu từ trạm tớ
Hình 2.1 : Khung tryền MODBUS
2.1.5.2, Khung thông báo modbus chế độ RTU.
Hình 2.2 : Định dạng khung truyền

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 9
Khi các thiết bị một mạng MODBUS chuẩn được đặt chế độ RTU (Remote
Terminal Unit - Khối thiết bị đầu cuối ở xa), mỗi byte trong thông báo được gửi thành
một kí tự 8 bit. Mỗi thông báo phải truyền kí tự thành dòng liên tục. Sự thuận lợi chính
của chế độ này là nó có mật độ kí tự lớn nhất, năng suất dữ liệu lớn hơn chế độ ASCII
trong cùng tốc độ baud.
2.2. Chuẩn RS232.
Chuẩn giao tiếp RS232 là một trong những kỹ thuật được sử dụng rộng rãi hiện nay để
nối ghép các thiết bị ngoại vi với máy tính. Nó là một chuẩn giao tiếp nối tiếp dùng định
dạng không đồng bộ, kết nối nhiều nhất là hai thiết bị, chiều dài kết nối lớn nhất cho phép
để đảm bảo dữ liệu là 12.5m đến 25.4m, tốc độ 20kbit/s đôi khi là tốc độ 115kbit/s với
một số thiết bị đặc biệt.
Chuẩn RS232 được nối ra một dắc cắm (gọi là cổng COM). Khi sử dụng có thể dùng
hai hay toàn bộ chân của dắc cắm này, nếu mục đích chỉ truyền hoặc nhận tín hiệu giữa
hai thiết bị thì ta chỉ cần sử dụng hai dây (một dây truyền hoặc nhận và một dây nối đất).
Ý nghĩa của chuẩn truyền thông nối tiếp là trong một thời điểm chỉ có một bít được gửi đi
dọc theo đường truyền. Các máy tính thường có một hoặc hai cổng nối tiếp theo chuẩn
RS232 được gọi là cổng COM. Chúng được dùng để ghép nối cho chuột, modem, thiết bị
đo lường…Trên main máy tính có loại 9 chân hoặc loại 25 chân tùy vào đời máy và main
của máy tính. Việc thiết kế giao tiếp với cổng RS232 cũng tương đối dễ dàng, đặc biệt khi
chọn chế độ hoạt động là không đồng bộ và tốc độ truyền dữ liệu thấp.
2.2.1, Ƣu điểm của giao diện nối tiếp RS232.
Khả năng chống nhiễu của các cổng nối tiếp cao.
Thiết bị ngoại vi có thể tháo lắp ngay cả khi máy tính đang được cấp điện.
Các mạch điện đơn giản có thể nhận được điện áp nguồn nuôi qua cổng nối
tiếp.
2.2.2, Những đặc điểm cần lƣu ý trong chuẩn RS232.
Trong chuẩn RS232 có mức giới hạn trên và dưới( logic 0 và 1) là 12V.
Hiện nay đang được cố định trở kháng tải trong phạm vi từ 3000 -7000 .
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 10
Mức logic 1 có điện áp nằm trong khoảng -3V đến -12V, mức logic 0 từ 3V
đến 12V.
Tốc độ truyền nhận dữ liệu cực đại là 100kbps (ngày nay có thể lớn hơn).
Các lối vào phải có diện dung nhỏ hơn 2500pF.
Trở kháng tải phải lớn hơn 3000 nhưng phải nhỏ hơn 7000 .
Độ dài của cáp nối giữa máy tính và thiết bị ngoại vi ghép nối qua cổng nối
tiếp RS232 không vượt quá 15m nếu không sử dụng modem.
Các giá trị tốc độ truyền dữ liệu chuẩn: 50, 75, 110, 750, 300, 600, 1200,
2400, 4800, 9600, 19200, 28800, 38400, …, 56600, 115200bps.
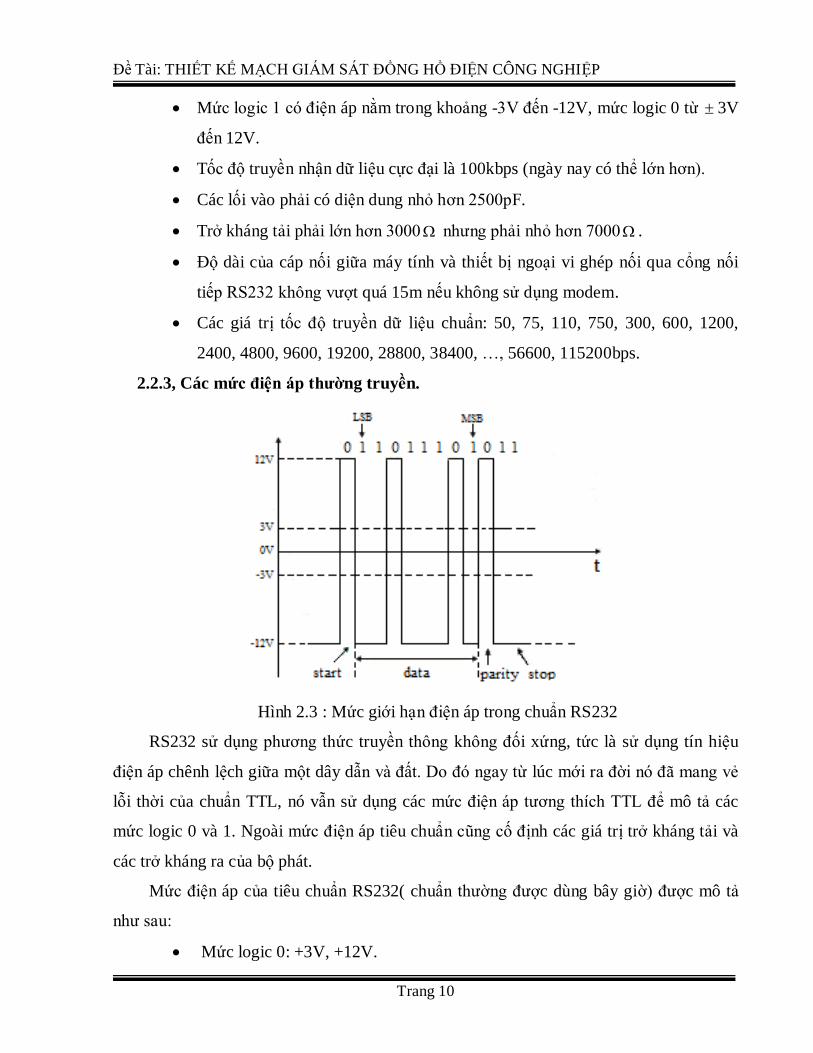
2.2.3, Các mức điện áp thƣờng truyền.
Hình 2.3 : Mức giới hạn điện áp trong chuẩn RS232
RS232 sử dụng phương thức truyền thông không đối xứng, tức là sử dụng tín hiệu
điện áp chênh lệch giữa một dây dẫn và đất. Do đó ngay từ lúc mới ra đời nó đã mang vẻ
lỗi thời của chuẩn TTL, nó vẫn sử dụng các mức điện áp tương thích TTL để mô tả các
mức logic 0 và 1. Ngoài mức điện áp tiêu chuẩn cũng cố định các giá trị trở kháng tải và
các trở kháng ra của bộ phát.
Mức điện áp của tiêu chuẩn RS232( chuẩn thường được dùng bây giờ) được mô tả
như sau:
Mức logic 0: +3V, +12V.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 11
Mức logic 1: -12V, -3V.
Các mức điện áp trong phạm vi từ -3V đến 3V là trạng thái chuyển tuyến. Chính vì
từ -3V tới 3V là phạm vi không được định nghĩa, trong trường hợp thay đổi giá trị logic
từ thấp lên cao hoặc từ cao xuống thấp, một tín hiệu phải vượt qua quãng quá độ trong
một thời gian ngắn hợp lý. Điều này dẫn tới việc phải hạn chế về điện dung của các thiết
bị tham gia và của cả đường truyền. Tốc độ truyền dẫn tối đa phụ thuộc vào chiều dài của
dây dẫn. Đa số các hệ thống hiện nay chỉ hỗ trợ với tốc độ 19,2kbit/s.
2.2.4, Cổng RS232 trên PC.
Hình 2.4 :Cổng RS232 trên PC
Chức năng của các chân :
Chân 1 : data carier detect (DCD) là chân phát tín hiệu mang dữ liệu.
Chân 2 : Receive data (RxD) là chân nhận dữ liệu.
Chân 3 : Transmit Data (TxD) là chân truyền dữ liệu.
Chân 4 : Data Termial Ready (DTR) là chân đầu cuối dữ liệu sẵn sàng được
kích hoạt bởi bộ phận khi muốn truyền dữ liệu.
Chân 5 : Signal Ground (SG) chân mass của tín hiệu
Chân 6: Data set ready (DSR) chân dữ liệu sẵn sàng, được kích hoạt bởi bộ
truyền khi nó sẵn sàng nhận dữ liệu.
Chân 7: Request to send chân yêu cầu gửi, bộ truyền đặt đường này lên mức
kích hoạt động để thông báo cho bộ truyền là nó sẵn sàng nhận tín hiệu.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 12
Chân 9: Ring Indicate (RI) báo chuông cho biết là bộ phận đang nhận tín hiệu
rung chuông.
2.2.5, Truyền dữ liệu.
2.2.5.1, Quá trình truyền dữ liệu.
Truyền dữ liệu qua cổng nối tiếp RS232 được thực hiện không đồng bộ. Do
vậy nên tại một thời điểm chỉ có một bit được truyền. Bộ truyền gửi một bit bắt đầu (bit
start) để thông báo cho bộ nhận biết một ký tự sẽ được gửi đến trong lần truyền bit tiếp
theo. Bit này luôn bắt đầu bằng mức 0. Tiếp theo đó là các bit dữ liệu (bit data) được gửi
dưới dạng mã ASCII (có thể là 5,6,7, hay 8 bit dữ liệu) sau đó là một Parity bit (kiểm tra
bit chẵn, lẻ hay không) và cuối cùng là bit dừng( bit stop) có thể là 1 hay 2 bit dừng.
2.2.5.2, Tốc độ baud.
Đây là một tham số đặc trưng của RS232. Tham số này chính là đặc trưng
cho quá trình truyền dữ liệu qua cổng nối tiếp RS232 là tốc độ truyền nhận dữ liệu hay
còn gọi là tốc độ bit. Tốc độ bit được định nghĩa là số bit truyền được trong thời gian 1
giây. Tốc độ bit này phải được thiết lập ở bên phát và bên nhận đều phải có tốc độ như
nhau ( tốc độ giữa vi điều khiển và máy tính phải chung nhau một tốc độ truyền bit).
Ngoài tốc độ bit còn một tham số để mô tả tốc độ truyền là tốc độ baud. Tốc
độ baud liên quan đến tốc độ mà phân tử mã hóa dữ liệu được sử dụng để diễn tả bit được
truyền còn tốc độ bit thì phản ánh tốc độ mà phân tử mã hóa dữ liệu được sử dụng để diễn
tả bit được truyền. Vì một phần tử báo hiệu sự mã hóa một bit nên khi đó hai tốc độ bit và
tốc độ baud là phải đồng nhất.
Một số tốc độ baud thường dùng: 50, 75, 110, 150, 300, 600, 1200, 2400,
4800, 9600, 19200, 28800, 38400, 56000, 115200. Trong thiết bị thường dùng tốc độ
baud là 19200.
Khi sử dụng chuẩn nối tiếp RS232 thì yêu cầu khi sử dụng chuẩn là thời gian
chuyển mức logic không vượt qua 4% thời gian truyền 1 bit. Do vậy, nếu tốc độ bit càng
cao thì thời gian truyền 1 bit càng nhỏ thì thời gian chuyển mức logic càng phải nhỏ. Điều
này làm giới hạn tốc độ baud và khoảng cách truyền.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 13
2.2.5.3, Bit chẵn lẻ hay Parity bit.
Đây là bit kiểm tra lỗi trên đường truyền. Thực chất của quá trình kiểm tra lỗi
khi truyền dữ liệu là bổ sung thêm dữ liệu được truyền để tìm ra hoặc sửa một số lỗi trong
quá trình truyền. Do đó trong chuẩn RS232 sử dụng một kỹ thuật kiểm tra chẵn lẻ. Một
bit chẵn lẻ được bổ sung vào dữ liệu được truyền để thấy số lượng các bit “1” được gửi
trong một khung truyền là chẵn hay lẻ.
Một Parity bit chỉ có thể tìm ra một số lẻ các lỗi như là 1, 3, 5, 7, 9… Nếu
như một bit mắc lỗi thì bit Parity bit sẽ trùng giá trị với trường hợp không mắc lỗi vì thế
không phát hiện ra lỗi. Do đó trong kỹ thuật mã hóa lỗi này không được sử dụng trong
trường hợp có khả năng một vài bit bị mắc lỗi.
2.2.6, Mạch chuẩn giao tiếp RS232 dùng IC max232.
Hình 2.5 : Mạch chuẩn giao tiếp RS232 dùng IC Max232
2.3. Chuẩn RS485.
Có thể coi chuẩn RS485 là một phát triển của RS232 trong việc truyền dữ liệu nối tiếp.
Những bộ chuyển đổi RS232/RS485 cho phép người dùng giao tiếp với bất kỳ thiết bị mà
sử dụng liên kết nối tiếp RS232 thông qua RS485. Liên kết RS485 được hình thành cho
việc thu nhận dữ liệu ở khoảng cách xa và điều khiển cho những ứng dụng. Những đặc
điểm nổi trội của RS485 là nó có thể hỗ trợ một mạng lên tới 32 trạm thu phát trên cùng
một đường truyền, tốc độ baud có thể lên tới 115.200 cho một khoảng cách là 4000feet
(1200m).

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 14
Với kiểu truyền cân bằng và các dây được xoắn lại với nhau nên khi nhiễu xảy ra ở
dây này thì cũng xảy ra ở dây kia, tức là hai dây cùng nhiễu giống nhau. Điều này làm
cho điện áp sai biệt giữa hai dây thay đổi không đáng kể nên tại nơi thu vẫn nhận được tín
hiệu đúng nhờ tính năng đặc biệt của bộ thu đã loại bỏ nhiễu.
Liên kết RS485 được sử dụng rất rộng rãi trong công nghiệp, nơi mà môi trường nhiễu
khá cao và sự tin tưởng vào tính ổn định của hệ thống là điều quan trọng. Bên cạnh đó
khả năng truyền thông qua khoảng cách xa ở tốc độ cao cũng rất được quan tâm, đặc biệt
là tại những nơi mà có nhiều trạm giao tiếp được trải ra trên diện rộng.
Bảng 2.3: Bảng tóm tắt thông số của RS485
Thông số Điều kiện Min Max Đơn vị
Áp ngõ ra điều khiển
khi hở mạch
1.5
-1.5
6
-6
V
V
Áp ngõ ra điều khiển
khi có tải
100LR
1.5
-1.5
5
-5
V
V
Dòng ngắn mạch ngõ ra
điều khiển
1 ngõ ra nối với
điểm chung
250 mA
Thời gian cạnh lên ngõ
ra điều khiển
54LR
50LC pF
30 % độ rộng
bit
Áp kiểu chung điều
khiển
54LR 3 V
Ngưỡng nhạy thu vào -7V CMV 12V 200 mV
Phạm vi áp kiểu chung
thu vào
-7 12 V
Tổng trở ngõ vào phía
thu
12 K
2.3.1, Một số vấn đề liên quan đến chuẩn RS485.
2.3.1.1, Truyền dẫn cân bằng.
Hệ thống truyền dẫn cân bằng gồm có hai dây tín hiệu A,B nhưng không có
dây mass. Sở dĩ được gọi là cân bằng là do tín hiệu trên dây này ngược với tín hiệu trên

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 15
dây kia. Nghĩa là dây này đang phát mức cao thì dây kia phải đang phát mức thấp và
ngược lại.
Hình 2.6: Kiểu truyền cân bằng 2 dây.
2.3.1.2, Mức tín hiệu.
Với hai dây A, B truyền dẫn cân bằng, tín hiệu mức cao TTL được quy định
khi áp của dây A lớn hơn dây B tối thiểu là 200mV, tín hiệu mức thấp TTL được quy định
khi áp của dây A nhỏ hơn dây B tối thiểu cũng là 200mV. Nếu điện áp ABV mà nằm trong
khoảng -200mV < ABV < 200mV thì tín hiệu lúc này được xem như là rơi vào vùng bất
định. Điện thế của mỗi dây tín hiệu so với mass bên phía thu phải nằm trong khoảng –7V
đến +12V.
Hình 2.7 : Tín hiệu trên 2 dây của hệ thống cân bằng.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 16
2.3.1.3, Cặp dây xoắn.
Như chính tên gọi của nó, cặp dây xoắn (Twisted-pair wire) đơn giản chỉ là
cặp dây có chiều dài bằng nhau và được xoắn lại với nhau. Sử dụng cặp dây xoắn sẽ giảm
thiểu được nhiễu, nhất là khi truyền ở khoảng cách xa và với tốc độ cao.
Hình 2.8 : Cặp dây xoắn trong RS485.
2.3.1.4, Trở kháng đặc tính cặp dây xoắn.
Phụ thuộc vào hình dáng và chất liệu cách điện của dây mà nó sẽ có một trở
kháng đặc tính (Characteristic impedence-Zo), điều này thường được chỉ rõ bởi nhà sản
xuất. Theo như khuyến cáo thì trở kháng đặc tính của đường dây vào khoảng từ 100 -
120Ω nhưng không phải lúc nào cũng đúng như vậy.
2.3.1.5, Điện áp kiểu chung.
Tín hiệu truyền dẫn gồm hai dây không có dây mass nên chúng cần được
tham chiếu đến một điểm chung, điểm chung lúc này có thể là mass hay bất kì một mức
điện áp cho phép nào đó. Điện áp kiểu chung (Common-mode voltage -VCM) về mặt
toán học được phát biểu như là giá trị trung bình của hai điện áp tín hiệu được tham chiếu
với mass hay một điểm chung.
Hình 2.9 : Cách xác định áp kiểu chung.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 17
2.3.1.6, Vấn đề nối đất.
Tín hiệu trên hai dây khi được tham chiếu đến điểm chung là đất (Ground) thì
khi đó nó cần được xem xét kỹ lưỡng. Lúc này bộ nhận sẽ xác định tín hiệu bằng cách
tham chiếu tín hiệu đó với đất của nơi nhận, nếu đất giữa nơi nhận và nơi phát có một sự
chênh lệch điện thế vượt qua ngưỡng cho phép thì tín hiệu thu được sẽ bị sai hoặc phá
hỏng thiết bị. Điều này cho thấy mạng RS485 gồm hai dây nhưng có tới ba mức điện áp
được xem xét. Do đất là một vật dẫn điện không hoàn hảo nên nó có một điện trở xác
định, gây ra chênh lệch điện thế từ điểm này tới điểm kia, đặc biệt là tại các vùng có
nhiều sấm sét, máy móc tiêu thụ dòng lớn, những bộ chuyển đổi được lắp đặt và có nối
đất.
Hình 2.10 : truyền RS485 khi tham chiếu với đất.
Chuẩn RS485 cho phép chênh lệch điện thế đất lên tới 7V, lớn hơn 7V là
không được. Như vậy đất là điểm tham chiếu không đáng tin tưởng và một cách tốt hơn
cho việc truyền tín hiệu lúc này là ta đi thêm một dây thứ ba, nó sẽ được nối mass tại
nguồn cung cấp để dùng làm điện áp tham chiếu.
2.3.1.7, Điện trở đầu cuối.
Điện trở đầu cuối (Terminating Resistor) đơn giản là điện trở được đặt tại hai
điểm tận cùng kết thúc của đường truyền. Giá trị của điện trở đầu cuối lí tưởng là bằng giá
trị trở kháng đặc tính của đường dây xoắn, thường thì vào khoảng 100 - 120Ω.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 18
Hình 2.11 : Cách đặt điện trở đầu cuối RT trong RS485.
Nếu điện trở đầu cuối không phù hợp với giá trị trở kháng đặc tính của đường
dây thì nhiễu có thể xảy ra do có sự phản xạ xuất hiện trên đường truyền, nhiễu ở mức độ
nhỏ thì không sao nhưng nếu ở mức độ lớn thì có thể làm tín hiệu bị sai lệch. Sau đây là
hình minh họa dạng tín hiệu thu được khi dùng hai điện trở đầu cuối khác nhau.
RT=54Ω RT=120Ω
Hình 2.12 : Tín hiệu RS485 thu được tương ứng với 2 giá trị điện trở RT.
2.3.1.8, Phân cực đƣờng truyền.
Khi mạng RS485 ở trạng thái rảnh thì tất cả các khối thu đều ở trạng thái lắng
nghe đường truyền và tất cả khối phát đều ở trạng thái tổng trở cao cách li với đường
truyền. Lúc này trạng thái của đường truyền được xem là bất định.
Nếu -200mV ≤ ABV ≤ 200mV thì trạng thái logic tại ngõ ra khối thu sẽ mang
giá trị của bit cuối cùng nhận được. Điều này không đảm bảo vì đường truyền rảnh trong
truyền dữ liệu nối tiếp đòi hỏi phải ở mức cao để khối thu không hiểu nhầm là có dữ liệu
xuất hiện trên đường truyền.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 19
Để duy trì trạng thái mức cao khi đường truyền rảnh thì việc phân cực đường
truyền (Biasing) phải được thực hiện. Một điện trở R kéo lên nguồn ở đường A và một
điện trở R kéo xuống mass ở đường B sao cho ABV ≥ 200mV sẽ ép đường truyền lên mức
cao.
Hình 2.13 : Phân cực cho đường truyền RS485.
2.3.2, Các kiểu mẫu truyền nhận trong RS485.
2.3.2.1, Một phát, một nhận.
Hình 2.14 : Sơ đồ một phát, một nhận trong RS485.
Trong kiểu mẫu có sử dụng cặp dây xoắn, hai điện trở đầu cuối RT.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 20
2.3.2.2, Một phát, nhiều nhận.
Hình 2.15 : Sơ đồ một phát, nhiều nhận trong RS485.
2.3.2.3, Hai bộ truyền nhận.
Ở đây việc truyền và nhận dữ liệu được thực hiện bởi một cặp dây xoắn nên
truyền nhận dữ liệu không thể diễn ra đồng thời mà phải theo hình thức bán song công
(half duplex), trong một thời điểm chỉ có một bộ truyền.
Hình 2.16 : Sơ đồ sử dụng 2 bộ truyền nhận trong RS485.
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 21
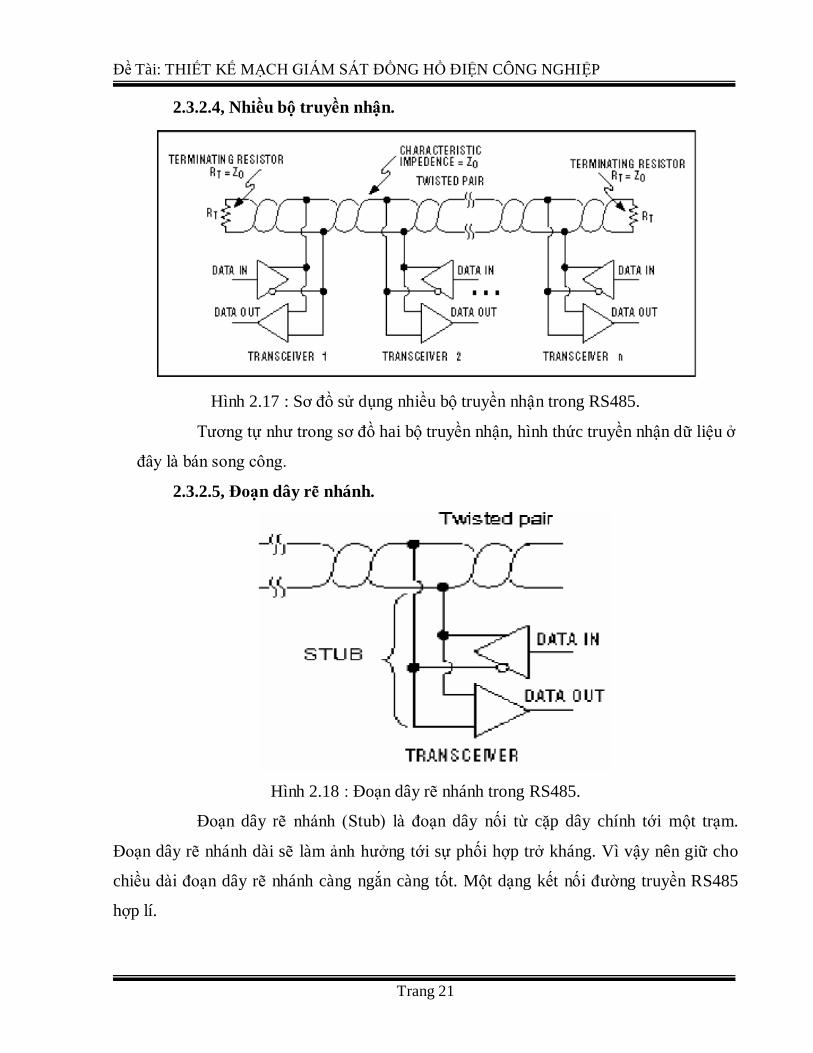
2.3.2.4, Nhiều bộ truyền nhận.
Hình 2.17 : Sơ đồ sử dụng nhiều bộ truyền nhận trong RS485.
Tương tự như trong sơ đồ hai bộ truyền nhận, hình thức truyền nhận dữ liệu ở
đây là bán song công.
2.3.2.5, Đoạn dây rẽ nhánh.
Hình 2.18 : Đoạn dây rẽ nhánh trong RS485.
Đoạn dây rẽ nhánh (Stub) là đoạn dây nối từ cặp dây chính tới một trạm.
Đoạn dây rẽ nhánh dài sẽ làm ảnh hưởng tới sự phối hợp trở kháng. Vì vậy nên giữ cho
chiều dài đoạn dây rẽ nhánh càng ngắn càng tốt. Một dạng kết nối đường truyền RS485
hợp lí.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 22
Hình 2.19 : Một dạng kết nối đường truyền RS485 hợp lí.
2.3.2.6, Cách thức truyền một mã ASCII theo chuẩn RS485.
Hình 2.20 : Biểu đồ truyền một mã ASCII theo chuẩn RS485.
Bình thường đường truyền rảnh (Idle line) sẽ ở mức cao, ABV > 200mV. Tín
hiệu TX Control cho phép phát tín hiệu đi. Mỗi bit tín hiệu TXD phát đi sẽ được biểu diễn
tương ứng dưới dạng tín hiệu VAB theo chuẩn RS485. Bit 1 tương ứng với ABV dương, bit
0 tương ứng với ABV âm. Sau khi phát đi đủ 10 bit thì đường truyền lại lên mức cao báo
hiệu trạng thái rãnh.
2.4. Kỹ thuật CRC.
CRC (Cyclic Redundancy Check) là một phương pháp để phát hiện lỗi bằng cách gắn
thêm một khối bit phía sau khối dữ liệu. CRC là một kỹ thuật mạnh để phát hiện lỗi, vì
vậy nó được dùng rộng rãi trong mọi hệ thống giao tiếp dữ liệu. Các bit bổ sung thêm vào

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 23
các bit thông tin được gọi là các bit CRC. Những bit này có thể là 16 hoặc 32. Nếu các bit
bổ sung là 16, CRC được biểu diễn như CRC-16. CRC-32 sử dụng 32 bit bổ sung. Đó là
những tiêu chuẩn quốc tế cho việc tính toán của CRC-16 và CRC-32.
Việc nhận lỗi sử dụng CRC là rất đơn giản. Ở bên truyền, CRC được thêm vào các bit
thông tin. Khi việc nhận kết thúc, bên nhận tính toán CRC từ những bit thông tin và nếu
CRC tích hợp CRC nhận, vậy thì bên nhận biết được những bit thông tin là đúng. CRC-16
và CRC-32 là hai thuật toán tiêu chuẩn được sử dụng để tính chu kỳ kiểm tra dư thừa. Các
bit CRC bổ sung (16 và 32) được nối thêm vào các bit thông tin ở bên phát. Tại phía thu,
các CRC nhận được so sánh với ước tính. Nếu kết hợp hai, các bit thông tin được coi là đã
nhận được một cách chính xác. Nếu hai không phù hợp, nó cho thấy rằng có những sai sót
trong các bit thông tin.
2.4.1, Lý thuyết CRC.
Một xâu bít bất kỳ được xem như một tập các hệ số (0 và 1) của một đa thức đại số.
Nếu xâu gồm k bít thì đa thức tương ứng sẽ có bậc là k-1 gồm các số hạng từ x0 đến xk-1.
Ví dụ: 110001 x5 + x4 + x0 = x5 + x4 + 1
Phương pháp CRC sẽ xây dựng một xâu các bít kiểm tra và ghép vào xâu bít cần
truyền, được gọi là dãy Checksum. Dãy Checksum được xây dựng như sau:
Chọn trước một đa thức gọi là đa thức sinh G(x) có hệ số cao nhất và thấp
nhất là 1.
Checksum được tìm thoả mãn điều kiện đa thức tương ứng với xâu ghép gồm
xâu gốc và checksum phải chia hết (Modulo 2) cho G(x).
Khi nhận được xâu bít, để kiểm soát lỗi lấy đa thức nhận được chia (Modulo
2) cho đa thức sinh G(x). Nếu không chia hết thì chắc chắn có lỗi, trường hợp
ngược lại chưa khẳng định là không có lỗi.
2.4.2, Thuật toán CRC.
Giả sử đa thức sinh được chọn là G(x) có bậc là r xâu bít cần truyền tương ứng với
đa thức M(x) có bậc m .
Các bước để xây dựng dãy Checksum như sau:

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 24
Thêm r bits 0 vào cuối xâu bits cần truyền xâu ghép sẽ gồm được tìm thoả
mãn điều kiện đa thức tương ứng với xâu ghép gồm (m + r) bits tương ứng
với đa thức xr M(x).
Chia Modulo 2 xâu bits tương ứng xr M(x) cho xâu bits tương ứng với G(x).
Lấy số bị chia ở bước trên trừ đi Modulo 2 cho số d.
Kết quả sẽ là xâu bít được truyền đi ( xâu gốc ghép với Checksum). Ký hiệu đa thức
tương ứng cho xâu đó là P(x). Rõ ràng P(x) chia hết cho G(x). Khi nhận, giả sử xâu bits
nhận được có đa thức tương ứng là Q(x) chia modulo 2 cho G(x). Giả thiết rằng Q(x) =
P(x) + E(x), trong đó E(x) được gọi là đa thức lỗi.
Ví dụ: Giả sử xâu gốc là 1101011011 suy ra M(x) = x9 + x8 + x6 + x4 + x3 + x + 1
có bậc m = 9; Chọn 10011 tương ứng G(x)= x4 + x + 1 (r=4).
Bước1. Xâu gốc ghép 4 bits 0 ta được 11010110110000.
Bước 2. Chia modulo 2
11010110110000 /(modulo2) 10011 ta được thương là 1100001010 và phần dư là
1110.
Bước 3. Xâu cần truyền là
11010110110000 - (modulo2) 1110 = 11010110111110 là P(x). Theo phương pháp này
việc lựa chọn đa thức sinh chuẩn G(x) sẽ giúp cho việc phát hiện lỗi rất hiệu quả.
Hiện nay người ta xây dựng 3 đa thức sinh chuẩn quốc tế:
CRC – 12 = x12 + x11 + x3 + x2 + x + 1
CRC – 16 = x16 + x15 + x2 + 1
CRC – CCITT = x16 + x12 + x5 + 1
2.5. Chuẩn truyền I2C.
I2C là viết tắt của cụm từ inter-intergrated circuit ( bus giao tiếp giữa các IC với nhau).
Một giao tiếp I2C gồm có hai dây Serial Data (SDA) và Serial Clock (SCL). SDA là
đường truyền dữ liệu hai hướng, còn SCL là đường truyền xung đồng hồ và chỉ theo một
hướng. Khi một thiết bị ngoại vi kết nối vào đường I2C thì chân SDA của nó sẽ nối với
dây SDA của bus, chân SCL sẽ nối với chân SCL của bus.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 25
Mỗi dây SDA và SCL đều được nối với điện áp dương của nguồn cấp thông qua một
điện trở kéo lên( pull-up resistor). Sự cần thiết của các điện trở kéo này là vì chân giao
tiếp của I2C của các thiết bị ngoại vi thường là dạng cực máng hở ( open-drain or open
collector ). Giá trị của các điện trở này khác nhau tùy vào từng thiết bị và chuẩn giao tiếp
thường giao động trong khoảng 1 đến 4.7 .
Một Bus I2C hoạt động được ở nhiều chế độ khác nhau:
Một Master một Slave.
Một Master nhiều Slave.
Nhiều Master nhiều Slave.
Tuy được kết nối trên cùng một bus nhưng sẽ không xảy ra trường hợp nhầm lẫn
giữa các thiết bị vì mỗi thiết bị sẽ được nhận ra bởi một địa chỉ duy nhất với mối quan hệ
Master/Slave tồn tại trong suốt thời gian kết nối. Mỗi thiết bị có thể hoạt động như là thiết
bị nhận dữ liệu hay có thể vừa truyền vừa nhận. Hoạt động truyền hay nhận còn tùy thuộc
vào việc thiết bị đó là master hay slave. Master nắm vai trò tạo xung đồng hồ cho toàn hệ
thống, khi giữa hai thiết bị Master/Slave giao tiếp thì thiết bị Master có nhiệm vụ tạo xung
đồng hồ và quản lý địa chỉ của thiết bị Slave trong suốt quá trình giao tiếp.
Giả thiết một thiết bị A muốn gửi dữ liệu đến thiết bị B, quá trình được thực hiện
như sau:
Thiết bị A(Master) xác định đúng địa chỉ của thiết bị B(Slave), cùng với việc
xác định địa chỉ thiết bị A sẽ quyết định việc đọc hay ghi vào thiết bị Slave.
Thiết bị A gửi dữ liệu tới thiết bị B.
Thiết bị A kết thúc quá trình truyền dữ liệu.
2.5.1, Các hàm thiết lập I2C.
START và STOP là những điều kiện bắt buộc phải có khi một thiết bị Master
muốn thiết lập giao tiếp với một thiết bị nào đó. START là điều kiện khởi đầu báo hiệu
bắt đầu của một giao tiếp, STOP báo hiệu kết thúc một giao tiếp.
Ban đầu khi chưa thực hiện quá trình giao tiếp, cả hai đường SDA và SCL
đều ở mức cao( SDA=SCL=HIGH), lúc này bus I2C được gọi là rỗi “bus free”, sẵn sàng
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 26
cho một giao tiếp. Hai điều kiện START và STOP là không thể thiếu trong việc giao tiếp
giữa các thiết bị I2C với nhau.
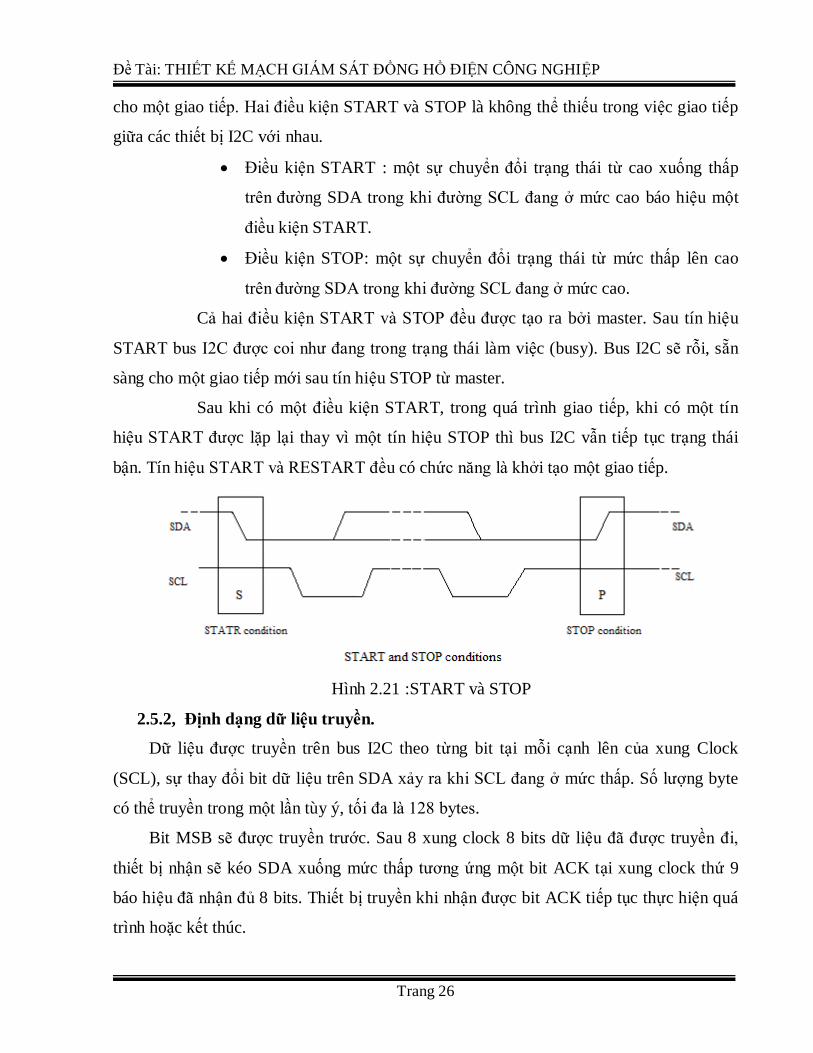
Điều kiện START : một sự chuyển đổi trạng thái từ cao xuống thấp
trên đường SDA trong khi đường SCL đang ở mức cao báo hiệu một
điều kiện START.
Điều kiện STOP: một sự chuyển đổi trạng thái từ mức thấp lên cao
trên đường SDA trong khi đường SCL đang ở mức cao.
Cả hai điều kiện START và STOP đều được tạo ra bởi master. Sau tín hiệu
START bus I2C được coi như đang trong trạng thái làm việc (busy). Bus I2C sẽ rỗi, sẵn
sàng cho một giao tiếp mới sau tín hiệu STOP từ master.
Sau khi có một điều kiện START, trong quá trình giao tiếp, khi có một tín
hiệu START được lặp lại thay vì một tín hiệu STOP thì bus I2C vẫn tiếp tục trạng thái
bận. Tín hiệu START và RESTART đều có chức năng là khởi tạo một giao tiếp.
Hình 2.21 :START và STOP
2.5.2, Định dạng dữ liệu truyền.
Dữ liệu được truyền trên bus I2C theo từng bit tại mỗi cạnh lên của xung Clock
(SCL), sự thay đổi bit dữ liệu trên SDA xảy ra khi SCL đang ở mức thấp. Số lượng byte
có thể truyền trong một lần tùy ý, tối đa là 128 bytes.
Bit MSB sẽ được truyền trước. Sau 8 xung clock 8 bits dữ liệu đã được truyền đi,
thiết bị nhận sẽ kéo SDA xuống mức thấp tương ứng một bit ACK tại xung clock thứ 9
báo hiệu đã nhận đủ 8 bits. Thiết bị truyền khi nhận được bit ACK tiếp tục thực hiện quá
trình hoặc kết thúc.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 27
2.5.3, Định dạng địa chỉ thiết bị.
Mỗi thiết bị ngoại vi tham gia vào bus I2C đều có một địa chỉ duy nhất, có độ dài 7
bits, như vậy trên một bus I2C ta có thể phân biệt tối đa 128 thiết bị. Byte đầu tiên được
gửi từ Master sẽ bao gồm 7 bits địa chỉ và bit thứ 8 gọi là bit R/W.
Bit R/W = 0 : Ghi dữ liệu từ Master vào Slave.
Bit R/W = 1 : Đọc dữ liệu từ Slave .
Hình 2.22 : Gửi bit định địa chỉ Slave
2.5.4, Phƣơng thức truyền dữ liệu tới Slave.
Các bước của quá trình truyền dữ liệu
Master tạo xung START
Master gửi 7 bits địa chỉ của Slave + bit R/W=0 (8 clock)
Tại thời điểm clock thứ 9, Master đọc xung ACK từ Slave. ACK=0 khi
Slave có địa chỉ tương ứng đã nhận dạng, Master bắt đầu gửi dữ liệu đến Slave theo từng
byte một, mất 9 clock do theo sau mỗi byte (8 clock) được gửi từ Master, Slave phải xác
nhận bằng một xung ACK=0.
Kết thúc quá trình truyền, Master sau khi truyền byte cuối cùng sẽ tạo xung
STOP báo hiệu kết thúc.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 28
Hình 2.23 : Khung truyền I2C
2.6. Đồng hồ Selec MFM – 383.
2.6.1, Giới thiệu đồng hồ tủ điện đa năng Selec MFM 383.
Hình 2.24 : Đồng hồ tủ điện đo đa năng Selec MFM-383.
Tích hợp hợp 8 tính năng trên một sản phẩm:
Đo điện áp 3 pha.
Đo dòng điện 3 pha.
Đo công suất tác dụng 3 pha.
Đo công suất phản kháng 3 pha.
Đo công suất biểu kiến 3 pha .
Đo điện năng.
Đo hệ số công suất 3 pha.
Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 29
Đo tần số.
Khi lắp ráp tủ điện hầu hết khách hàng cần trang bị những loại đồng hồ đo dòng điện
A và điện áp V của 3 pha, hiện nay do vấn đề rất cần thiết là tiết kiệm điện năng thì việc
kiểm soát điện năng tiêu thụ, công suất phản kháng Q, hệ số công suất, công suất hữu
công P để kiểm chứng các biện pháp tiết kiệm điện, phân bố tải tùy theo thời gian, điều
chỉnh độ lệch pha của tải... cao hơn là việc khoán số điện theo từng ca sản xuất được các
doanh nghiệp rất quan tâm.
Nắm bắt được điều này Selec đã nghiên cứu và cho ra đời dòng sản phẩm MFM383
đo được hầu hết tất cả các tham số của mạng 3P và 1P với chỉ một thiết bị. Khi lắp thiết
bị này khách hàng không cần mất nhiều thời gian để khoét thêm từ 2 đến 30 lỗ gá thiết bị,
tiết kiệm lượng lớn các dây điện đấu nối, tiết kiện thời gian đấu nối, tiết kiệm nhân công
lắp đặt chuyển mạch, và đấu nối... chỉ với chi phí rất nhỏ so với cách làm cũ thì khách
hàng có một tủ điện chuyên nghiệp hơn, giá thành rẻ hơn, vấn đề đo các tham số trở nên
quá rễ dàng.
2.6.2, Thông số kỹ thuật.
Các thông số kỹ thuật của đồng hồ MFM-383
Kích thước 96x96mm (mặt ngoài 99x99mm, khoét lỗ 92x92mm)
Hiển thị : LCD : 3 hàng x 3 số + 3 biểu đồ cột cho dòng điện + 8 số điện
năng KWH
Sử dụng cho mạng 3 pha 4 dây hoặc 1 pha 2 dây
Biến dòng chọn được từ 5 đến 5000/5A
Tiêu hao năng lượng ngõ vào : Max 0.5VA / phase
Cấp chính xác : cấp 1
Nguồn nuôi : 90 đến 270VAC
Khả năng nhớ : 10 năm cho chỉ số điện năng
Khả năng truyền thông qua MODBUS và qua phần mềm của hãng
(MFM383-c)

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 30
2.6.3, Sơ đồ kết nối.
Hình 2.25: Sơ đồ kết nối đồng hồ với điện áp 3 pha.
Hình 2.26: Sơ đồ kết nối đồng hồ với điện áp 1 pha

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 31
CHƢƠNG 3
CÁC LINH KIỆN SỬ DỤNG
3.1. PIC 24FJ128GB206.
Hình 3.1 : PIC24FJ28GB206
Thông số kỹ thuật
Điện áp hoạt động 3.3V.
64 chân.
I/O ports: Ports B, C, D, E, F, G.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 32
128Kbyte bộ nhớ chương trình ( program memory) dùng để chứa chương trình nạp.
Vì được chế tạo bằng công nghệ Flash nên bộ nhớ này có thể được lập trình hay
xóa nhiều lần. Ưu điểm này khiến PIC24FJ128GB206 thích hợp cho việc xây dựng
các ứng dụng điều khiển.
96Kbyte RAM. Bộ nhớ dữ liệu được sử dụng trong suốt quá trình thực thi chương
trình của vi điều khiển.
5 timer 16 bit.
4 Modul UAR.T
3 Modul SPI.
3 Module I2C.
16 kênh ADC 10-bit.
Xây dựng theo kiến trúc Havard có sửa đổi.
Thạch anh nội 8MHZ.
3.2. Reatime DS1302.
Hình 3.2 : Reatime DS1302
Điện áp nguồn 2.0V- 5V.
Cho phép đọc năm.tháng,ngày, tuần, thứ, giờ, phút, giây.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 33
Bảng 3.1 : Chân và chức năng chân của DS1302
Tên Chân Chức năng
VCC2 1 cấp nguồn từ 2.0V-5V
X1, X2 2, 3 2 chân nối thạch anh 32.768HZ
GND 4 Chân nối mass
RST 5 Chân cho phép DS1302 hoạt động
I/O 6 Chân DATA
SCLK 7 Chân xung Clock
VCC1 8 Nguồn cấp bằng pin
3.3. MAX485.
Hình 3.3 : Max485
Giao thức truyền là bán song công.
Tốc độ truyền lớn hơn 2.5Gb/s.
Thời gian truyền 30ns ,cộng trừ 5ns.
Điều khiển bằng nguồn đơn 5V.
Điện áp input tại các chân là 2V
Điện áp output tại các chân là 3.5V
Truyền được trên 32 slave trên đường truyền.
Bảng 3.2: Chân và chức năng các chân của MAX485
Tên Chân Chức năng
RO 1 Nhận ngõ ra:A>B khoảng 200mv thì chân RO ở mức

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 34
cao.A<B khoảng 200mV thì chân RO ở mức thấp
RE 2 Cho phép nhận. Nếu chân này ở mức 0 thì chân RO hoạt
động. RO ở mức cao khi chân này ở mức cao
DE 3 Cho phép chân ngõ ra điều khiển hoạt động. Chân ngõ ra
điều khiển hoạt động khi DE mức 1 và ngược lại.khi DI ở
mức 1 mà !RE ở mức 0 thì chức năng là nhận
DI 4 Bộ điều khiển ngõ vào. Khi DI mức 0 thì A mức 0, B mức
1 và ngược lại
GND 5 Mass
A 6 Điều khiển ra và nhận vào vi sai
B 7 Điều khiển ra và nhận vào vi sai
VCC 8 Nguồn: 4.75V ≤ Vcc ≤ 5.25V
3.4. EEPROM 24LC256.
Hình 3.4 : EEPROM 24LC256
Là EEPROM chuẩn I2C.
Điện áp 2.5V-5.5V.
Lưu data > 200 năm.
Bộ nhớ 256kbyte.
Khả năng đọc xóa được 1000000 lần.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 35
Bảng 3.3 : Chân và chức năng các chân của EEPROM 24LC256
Tên Chân Chức năng
A0, A1, A2 1, 2, 3 Chân định địa chỉ bằng phần cứng cho EEPROM
VSS 4 Chân nối mass
SDA 5 Chân DATA
SCL 6 Chân xung Clock
WP 7 write-protect input
VCC 8 Chân nối nguồn
3.5. 74LVC1T45.
Hình 3.5 : 74LV1T45
Độ rộng điện áp :
o Vcc(A) : 1.2V – 5.5V
o Vcc(B) : 1.2V – 5.5V
Bảng 3.4 : Điều kiện để xác định input/output 74LV1T45.
Supply voltage Input Input/output
( )CC AV, ( )CC BV
DIR A B
1.2V to 5.5V L A=B Input
1.2V to 5.5V H Input B=A
GND X Z Z

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 36
Bảng 3.5 : Chân và chức năng các chân của 74LV1T45
Tên Chân Miêu tả
( )CC AV 1 Nguồn port A và chân DIR
GND 2 Mass(0V)
A 3 Data input or output
B 4 Data input or output
DIR 5 Chân điều khiển hướng
( )CC BV 6 Nguồn port B
3.6. Graphic LCD 128x64.
Hình 3.6 : Graphic LCD 128x64
Bảng 3.6 : Chân và chức năng các chân của GRAPHIC LCD
Symbol Pin Discription Funtion
VSS 1 Ground 0V
VDD 2 Power supply logic circuit +5V
V0 3 LCD contrast adjustment
RS 4 Introduction/ data register selection RS=0 : introduction register
RS=1 : data register
R/W 5 Read/write selection R/W=0 : register write

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 37
R/W=1 : register read
E 6 Enable Signal
DB0 7 Data input/output lines 8 bit DB0-DB7
DB1 8
DB2 9
DB3 10
DB4 11
DB5 12
DB6 13
DB7 14
CS1 15 Chip selection CS1=1 : chip select signal
for IC1
CS2 16 Chip selection CS2=1 : chip select signal
for IC2
RST 17 Reset signal RSTB=0 : display
off,display from line 0
VEE 18 Negative Voltage for LCD driving -10V
LED+ 19 Supply voltage for LED+ +5V
LED- 20 Supply voltage for LED- 0V

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 38
3.7. 74ALVC164245/SO.
Hình 3.7: 74LVC164245/SO
Độ rộng điện áp nguồn :
o 3V port : (Vcc(A) ) : 1.5V -3.6V
o 5V port : (Vcc(B)) : 1.5V – 5.5V
Bảng 3.7 : Chân và chức năng các chân của 74LV164245/SO
symbol Pin Discription
SOT370-1 and SOT362-1 SOT1134-2
1DIR, 2DIR 1,24 A30,A13 Direction control input
1B0 to 1B7 2,3,5,6,8,9,11,12 B20,A31,D5,D1,
A2,B2,B3,A5
Data input/output
2B0 to 2B7 13,14,16,17,19,20,22,23 A6,B5,B6,A9,D2,
D6,A12,B8
Data input/output
GND 4,10,15,21,28,34,39,45 A32,A3,A8,A11,
A16,A19,A24,A27
Ground
( )CC BV 7,18 A1,A10 Supply voltage B(5V
bus)

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 39
1OE ,2OE 48,25 A29,A14 Output enable input
B(active low)
1A0 to 1A7 47,46,44,43,41,40,38,37 B18,A28,D8,D4,
A25,B16,B15,A22
Data input/output
2A0 to 2A7 36,35,33,32,30,29,27,26 A21,B13,B12,A18,
D3,D7,A15,B10
Data input/output
( )CC AV 31,42 A17,A26 Supply voltage A(3V
bus)
n.c - A4,A7,A20,A23,
B1,B4,B7,B9,B11,
B14,B17,B19
Not connected
Bảng 3.8 : Điều kiện để xác định input/output 74LVC164245/SO.
Inputs Output
NOE nDIR nAn nBn
L L nAn=nBn Inputs
L H Inputs nBn=nAn
H X Z Z

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 40
CHƢƠNG 4 :
THIẾT KẾ HỆ THỐNG
4.1. Sơ đồ khối hệ thống.
Hình 4.1 : Sơ đồ khối mạch thiết kế
4.1.1, Sơ đồ nguyên lý khối hiển thị.
D4
R2 4.7K
LCD_D5LCD_D6D6LCD_D7
R20
4.7K
D5
LCD_DIR
LCD_D0
U274ALVC16245/SO
2356891112
4746444341403837
4 10
15
21
28
34
39
45
3635333230292726
1314161719202223
124
4825
7 18
31
42
1B11B21B31B41B51B61B71B8
1A11A21A31A41A51A61A71A8
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
2A12A22A32A42A52A62A72A8
2B12B22B32B42B52B62B72B8
1DIR2DIR
1OE2OE
VC
C1
VC
C1
VC
C2
VC
C2
5V
LCD_DI
5V
D7
LCD_D1
LCD_RW
CS2
Q1MMBT2222A
J10BUZZER
12
LCD_D2
BUZZER
LCD_EN
DI
LCD_D3
5V
D2
R8 10k
3.3V
LCD_CS1CS1
Q2MMBT2222A
D3
5V
D0
R22
4.7K
RW
LCD_BRIGHT
D1
LCD_D4
5V
EN
J1
GRAPHIC LCD
1
2
3
456
789
1011121314
1516
17
18
19
20
LCD_CS2
Hình 4.2: khối hiển thị

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 41
Với mục đích thay thế máy tính, ta dùng Graphic LCD 128x64 để hiện thị số liệu
đồng hồ do Graphic LCD có thể hiển thị chữ, số, hình ảnh.
Graphic LCD giao tiếp với vi xử lý qua IC đệm 74LVC16245/SO do điện áp của vi
xử lý là 3,3V còn điện áp của Graphic LCD là 5V. IC đệm 74LVC16245/SO là IC cho
phép giao tiếp giữa linh kiện có điện áp từ 1.5V đến 3.6V và linh kiện có điện áp từ 1.5V
đến 5.5V.
Chân 7 và chân 18 là chân nguồn B và được cấp điện áp là 5V.
Chân 31 và chân 42 là chân nguồn A và được cấp điện áp là 3.3V.
Chân 1 và chân 24 là 2 chân điều khiển hướng ngõ vào. Khi chân nOE = 0 nếu
nDIR=1 thì các chân cổng A sẽ là các chân input, lúc này data từ vi xử lý sẽ
truyền ra các chân cổng A qua chân cổng B và đến Graphic LCD, còn nếu chân
nDIR=0 thì các chân cổng B sẽ là các chân input, data trên Graphic LCD được
truyền đến các chân cổng B rồi qua chân cổng A và vào vi điều khiển.
4.1.2, Sơ đồ nguyên lý khối lƣu trữ và đồng hồ thời gian thực.
BT1
BATTERY
R154.7K
3.3V3.3V
U7
DS1302
2
3
4
567
1
8
X1
X2
GN
D
RSTI/OSCLK
VC
C2
VCC1
Y332.768Hz
SCL
U1024LC256
123
4
56
7
8
A0A1A2
GN
D
SDASCL
WP
VC
C
SDA
C915p
C815p
3.3V
DS1302_RST
R144.7K
3.3V
Hình 4.3: Khối lưu dữ liệu và Reatime

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 42
Để thực hiện việc lưu số liệu tôi thiết kế trên mạch thêm EEPROM 24LC256.
EEPROM này là EEPROM chuẩn I2C giúp tiết kiệm chân vi điều khiển hơn nữa điện áp
hoạt động của nó là 3.3V bằng điện áp vi điều khiển mà ta sử dụng nên không cần dùng
IC đệm.
Thời gian thực được lấy từ Reatime DS1302. Mục đích của tôi khi sử dụng Reatime
DS1302 là do nó có điện áp hoạt động bằng với vi điều khiển ta đang dùng vì vậy sẽ tiết
kiệm được chi phí và diện tích mạch do không phải gắn thêm IC đệm.
Dữ liệu sau khi lấy từ đồng hồ về PIC24FJ128GB206 sẽ được lưu vào bộ nhớ
EEPROM ngoài là 24LC256 và thời gian lưu. Thời gian sẽ được lấy từ reatime DS1302.
4.1.3, Sơ đồ nguyên lý khối giao tiếp RS485.
5V
U8
RJ45
45
78
1236
VCCVCC
GNDGND
A1B1A2B2
D9
4001
12V
R19
1K
D4
4001
TxD2
12V
RxD2
U21
RJ45
45
78
1236
VCCVCC
GNDGND
A1B1A2B2
5V
U9MAX485
1
2
76
3
4
85
R
RE
BADE
D
VC
CG
ND
RTS2
R18
120
3.3V
R17
1K
U11
74LVC1T45
1 6
23 45
VCCA VCCB
GNDA BDIR
Hình 4.4: Khối RS485
RS485 kết nối với chân bộ Uart của vi điều khiển, sử dụng ngắt nhận của bộ Uart để
nhận số liệu chính xác và liên tục mà không ảnh hưởng tới công việc khác của vi điều
khiển.
IC 74LVC1T45 là IC đệm giao tiếp giữa 2 điện áp khác nhau. Tác dụng của nó giống
như IC74ALVC14245. Do Max485 có điệ áp input là 2V thì max485 đã hiểu là mức 1
trong khi vi điều khiển truyền ra là 3.3V nên trên dây TxD không cần IC đệm, còn điện áp
output của max485 là 3.5V nên khi trên dây RxD phải có IC đệm trước khi vào vi điều
khiển.

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 43
4.1.4, Sơ đồ nguyên lý khối nguồn.
Điều kiện điện áp: ta dùng trong mạch là các linh kiện có điện áp nguồn là 3.3V
và 5V vì vậy thiết kế Khối nguồn đưa ra điện áp là 5V và 3.3V để cung cấp cho
toàn mạch.
Điều kiện dòng:
o LT1117-3.3/SO dòng điện hoạt động 800mA
1 24 128 206 24 256 1302 74 1 452FJ GB LC DS LVC TI I I I xI
1 0.8 3 1.28 2 100 205.08I mA mA mA x mA mA < 800mA
o LM2576/TO chịu dòng 3A
LT1117 74 16245 AX4852GraphicLCD ALVC MI I I I xI
0.1 800 100 2 1 902.1I mA mA mA x mA mA < 3A
Như vậy với việc chọn 2 linh kiện là LM2576/TO và LT1117-3.3/SO sẽ đáp ứng
được về điện áp, dòng điện, công suất cung cấp cho toàn mạch.
12V
C14104
C17104
U20LM2576/TO
1
2
3
4
5
VIN
OUTGN
D
FB
ON
/OF
F
5V
+ C11680uF/16V
C15104
L2220uH
U13LT1117-3.3/SO
1
23
AD
J VOUTVIN
D3
1N4007
C23104
C19104
SW1
SW KEY-DPDT
C21104
+
C12680uF/16V
C20104
C13104
C16104
5V
C18104J4
DC JACK
123
3.3V
+
C10680uF/16V
D8SS34
Hình 4.5: khối nguồn
4.2. Sơ đồ nguyên lý .

D4
R2 4.7K
ENC_SCK
5V
LCD_D5
EEPROM_MOSI
U1
PIC24FJxxxGB206
123
456
7
8
910
111213141516
1718
19
20
21222324
25
26
27282930
3132
33
34
35
3637
38
39
40
41
42434445
46
4748
49505152535455
5657
5859
6061626364
PMD5/CN63/RE5SCL3/PMD6/CN64/RE6SDA3/PMD7/CN65/RE7
C1IND/RP21/PMA5/CN8/RG6C1INC/RP26/PMA4/CN9/RG7
C2IND/RP19/PMA3/CN10/RG8
MCLR
C2INC/RP27/PMA2/CN11/RG9
VS
SV
DD
PGEC3/AN5/C1INA/VBUSON/RP18/CN7/RB5PGED3/AN4/C1INB/USBOEN/ RP28/CN6/RB4AN3/C2INA/VPIO/CN5/RB3AN2/C2INB/VMIO/RP13/CN4/RB2PGEC1/AN1/VREF-/ RP1/CN3/RB1PGED1/AN0/VREF +/PMA6/RP0/CN2/RB0
PGEC2/AN6/RP6/CN24/RB6PGED2/AN7/RP7/RCV/CN25/RB7
AV
DD
AV
SS
AN8/RP8/CN26/RB8AN9/RP9/PMA7/CN27/RB9TMS/CV REF/AN10/PMA13/CN28/RB10TDO/AN11/PMA12/CN29/RB11
VS
S
VD
D
TCK/AN12/CTEDG2/PMA11/CN30/RB12TDI/AN13CTEDG1/PMA10/CN31/RB13AN14/CTPLS/RP14/PMA1/CN32/RB14AN15/ RP29/REFO/PMA0/CN12/RB15
SDA2/ RP10/PMA9/CN17/RF4SCL2/ RP17/PMA8/CN18/RF5
RP16/USBID/CN71/RF3
VBUS/RF7
VUSB
D-/CN84/RG3D+/CN83/RG2
VD
DO
SC
I/C
LK
I/C
N2
3/R
C1
2
OS
CO
/CL
KO
/CN
22
/RC
15
VS
S
RTCC/DMLN/RP2 /CN53/RD8DPLN/SDA1/RP4 /PMA14/PMCS1/CN54/RD9
SCL1/ RP3 /PMA15/PMCS2/CN55/RD10RP12/PMACK2/CN56/RD11
DMH/RP11/INT0/CN49/RD0
SOSCI/C3IND/CN1/RC13SOSCO/SCLKI/T1CK/C3INC/RPI37/CN0/RC14
VCPCON/RP24/V BUSCHG/CN50/RD1DPH/RP23/PMACK1/CN51/RD2
RP22/PMBE0/CN52/RD3RP25/PMWR/CN13/RD4RP20/PMRD/CN14/RD5
C3INB/CN15/RD6C3INA/SESSEND/CN16/RD7
VCAPENVREG
VBUSST/V CMPST1/VBUSVLD /CN68/RF0VCMPST2/SESSVLD/CN69/RF1
PMD0/CN58/RE0PMD1/CN59/RE1PMD2/CN60/RE2PMD3/CN61/RE3PMD4/CN62/RE4
U3ENC28J60
1
2
3456789
10
11
1213
14
15
1617
18
19
20
21
22
23
24
25
2627
28
VCAP
VS
S
CLKOUTINTWOLSOSISCKCSRESET
VS
SR
X
TPIN-TPIN+
RBIAS
VD
DT
X
TPOUT-TPOUT+
VS
ST
X
VD
DR
XV
DD
PL
L
VS
SP
LL
VS
SO
SC
OS
C1
OS
C2
VD
DO
SC
LEDBLEDAV
DD
ENC_CS
C722p
BTN2
R651
BT1
BATTERY
RTS2
DI
INT
R5 1K
LCD_D6
DS1302_RST
R154.7K
3.3V
CS1
C622p
BTN1
3.3V
TxD2
C3
103
R13
120
INT
U8
RJ45
45
78
1236
VCCVCC
GNDGND
A1B1A2B2
D9
4001
D6LCD_D7
D1
R1051
BTN0
R20
4.7K
RXD2
U4
RJ45
45
78
36
12
VCCVCC
GNDGND
A2B2
A1B1
D5
C522p
3.3V
LCD_DIR
R12
1K
LCD_D0
ENC_CS
U274ALVC16245/SO
2356891112
4746444341403837
4 10
15
21
28
34
39
45
3635333230292726
1314161719202223
124
4825
7 18
31
42
1B11B21B31B41B51B61B71B8
1A11A21A31A41A51A61A71A8
GN
DG
ND
GN
DG
ND
GN
DG
ND
GN
DG
ND
2A12A22A32A42A52A62A72A8
2B12B22B32B42B52B62B72B8
1DIR2DIR
1OE2OE
VC
C1
VC
C1
VC
C2
VC
C2
3.3V
BTN0
5V
5V
BTN1
Y24MHz
D2
ENC_SCK
12V
LCD_DI
U7
DS1302
2
3
4
567
1
8
X1
X2
GN
D
RSTI/OSCLK
VC
C2
VCC1
ENC_MOSI
3.3V
BTN5
C2
103
R351
5V
BTN2
RTS1
D7
LCD_D1
ENC_MOSI
BTN4
R19
1K
BTN3
Y332.768Hz
3.3V
TxD1
D5
LCD_RW
U2325LV512
1
25
4
7
6
38
CS
SDOSDI
GN
D
HO
LD
SCLK
WP
VC
C
CS2
BTN5
Q1MMBT2222A
J10BUZZER
12
3.3V
BTN4
LCD_BRIGHT
D4
LCD_D2
ENC_MISO
U6
74LVC1T45
1 6
23 45
VCCA VCCB
GNDA BDIR
BUZZER
J6
CON1
1
3.3V
SCL
D4
4001
PGC
RxD1
C1103
LCD_EN
U5MAX485
1
2
76
3
4
85
R
RE
BADE
D
VC
CG
ND
D0
3.3V
EEPROM_SCK
R11
1K
LCD_DIR
TxD2
12V
DI
LCD_D3
L1Ferrite Bead
RxD2
U21
RJ45
45
78
1236
VCCVCC
GNDGND
A1B1A2B2
5V
EEPROM_MISO
R751
SDA
U1024LC256
123
4
56
7
8
A0A1A2
GN
D
SDASCL
WP
VC
C
D2
CS2
LEDA
R8 10k
RTS1
3.3V
LCD_CS1
EEPROM_CS
Y125MHz
CS1
SCL
Q2MMBT2222A
PGD
ENC_MISO
5V
LEDB
J5
CON7
1234567
D3
R21
10K
123456789
5V
EEPROM_CS
D6
SDA
D0
C915p
MCLR
R22
4.7K
LEDA
RW
C422p
U9MAX485
1
2
76
3
4
85
R
RE
BADE
D
VC
CG
ND
EEPROM_MISO
C815p
5V
RTS2
LCD_BRIGHT
R16
1K
R91K
EN
J2
RJ-4
5 H
R9
11
02
A
1
23
45
67
8
910
11
12
MCLR
LEDB
R18
120
3.3V
D1
D1
4148
LCD_D4
EEPROM_MOSI
R17
1K
5V
D7
DS1302_RST
EN
R144.7K
3.3V
PGD
J3
ICSP
12345
J1
GRAPHIC LCD
1
2
3
456
789
1011121314
1516
17
18
19
20
3.3V
RxD1
RW
LCD_CS2
EEPROM_SCK
R4 1K
TxD1
BTN3
U11
74LVC1T45
1 6
23 45
VCCA VCCB
GNDA BDIR
D3
J7
CON1
1
PGC
R1
4.7K

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 45
4.3. Lƣu đồ giải thuật.
Button 1
nhấn ?
Button 2
nhấn ?
N
Gửi yêu cầu truyền dữ
liệu đến slave có địa chỉ
bằng ID
ID = ID + 1Y
ID = ID – 1Y
ID = 32 ?
ID = 0 ?
ID = 0Y
ID = 32
Y
N
N
Có dữ liệu từ
slave ?Timeout ?
N
N
Hiển thị dữ liệu
Hiển thị thông
báo mất kết nối
Y
Button 3
nhấn ?
N
Button 4
nhấn ?
N
Đang hiển thị
dòng thứ 0 ?
YCuộn màn hình lên
N
Đang hiển thị
dòng 50 ?
YCuộn màn hình xuống
N
Y
Y
CRC đúng ?
Y
Y
Start
Khởi tạo các module
phần cứng
END
N

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 46
Chƣơng 5:
KẾT LUẬN
5.1. Các điểm đạt và chƣa đạt đƣợc.
5.1.1, Các điểm đạt đƣợc.
Hiện nay đề tài của tôi đã hoàn thành phần cứng, giao tiếp được với LCD GRAPHIC,
giao tiếp được với đồng hồ MFM-383, lập trình giao diện hiển thị trên màn hình Graphic
LCD 128x64, kết hợp nút nhấn để chọn đồng hồ nào sẽ được hiện thị trên LCD và kéo
màn hình để tiện quan sát. Lấy được thời gian thực từ DS1302 hiển thị trên LCD.
5.1.2, Các điểm chƣa đạt.
Do thời gian thực hiện đề tài ngắn nên tôi chưa hoàn thành đề tài theo đúng dự tính
ban đầu. Tôi chưa thực hiện được bước truyền dữ liệu từ vi điều khiển về máy tính chủ
qua cổng mạng và lưu dữ liệu vào EEPROM
5.2. Hƣớng phát triển đề tài.
Tôi sẽ tiến hành thiết kế phần mềm để truyền dữ liệu về máy tính qua giao thức
Ethernet và lưu số liệu từ các đồng hồ gửi về vào EEPROM .

Đề Tài: THIẾT KẾ MẠCH GIÁM SÁT ĐỒNG HỒ ĐIỆN CÔNG NGHIỆP
Trang 47
TÀI LIỆU THAM KHẢO
Tiếng Việt :
[1] Hoàng Minh Sơn, “Mạng truyền thông công nghiệp”, NXB khoa học và kỹ thuật,
Hà Nội-2004.
[2] http://www.tailieu.vn
[3] http://www.picvietnam.com
[4] http://www.dientuvietnam.net
Tiếng Anh :
[5] http://www.microchip.com
[6] http://www.engscope.com/pic24-tutorial/
[7] http://www.youtube.com/watch?v=Jdp6owxHVl0&feature=player_embedded
[8] http://www.alldatasheet.com
[9] http://selectautomation.blogspot.com
[10] http://www.modbus.org/


















