
The Unknotting Problem and Fixed-Parameter...
14
The Unknotting Problem and Fixed-Parameter Tractability Adele Jackson Supervised by Dr Benjamin Burton Australian National University Vacation Research Scholarships are funded jointly by the Department of Education and Training and the Australian Mathematical Sciences Institute.
Transcript of The Unknotting Problem and Fixed-Parameter...

The Unknotting Problem and Fixed-Parameter Tractability
Adele Jackson
Supervised by Dr Benjamin Burton
Australian National University
Vacation Research Scholarships are funded jointly by the Department of Education and Training and the Australian Mathematical Sciences Institute.

1 Introduction
Informally, the unknot recognition problem is to, given a knot, recognise whether ornot it can be untangled. A substantial open question in computational topology iswhether or not there exists a polynomial time algorithm to answer this question. Weinvestigated the question of whether unknot recognition is fixed-parameter tractable(FPT) in the cutwidth of a triangulation of the knot complement manifold, whichwould be trivially implied by unknot recognition being in P. In this report, we givean exposition of unknot recognition being in NP, and describe the approaches weexplored in trying to show unknot recognition is FPT.
2 The unknot recognition problem
Definition 2.1. A knot K is a smooth embedding fK : S1 → S3. We can write thisknot as an injective continuous map K : S1 → S3.
We say that two knots, K1 and K2, are equivalent if there exists some continuousmap f : S3 × [0, 1] → S3 such that f(s, 0) = s, f(s, t0) : S3 → S3 for fixed t0 ands ∈ So3 is a homeomorphism on S3, and f ◦K1 = K2. Then f is an ambient isotopytaking K1 to K2.
Then the unknot recognition problem is, given a knot, to check whether it isequivalent to the circle. To answer this with a computation, we give another criterionfor a knot being unknottable.
3 A criterion for unknot recognition
Theorem 3.1 ([3]). A knot K can be unknotted if and only if there exists a disk Dwith smooth boundary embedded in S3, such that its boundary, ∂D, is K traversedonce.
Alternately, we can view this disk as living in the complement of the knot, bysetting up a criteria for this disk that does not directly reference traversing the knot’sboundary.
Definition 3.2. The knot complement manifold of a knot K, MK, is S3 −{a solid torus neighbourhood of K}.
Definition 3.3. An essential disk in a manifold M is a disk D embedded in M suchthat the boundary of D lies in the boundary of M , and D cannot be homotoped into∂M while holding ∂D fixed.
2

Figure 1: A solid torus with (a) a non-essential disk, and (b) an essential disk.
For example, disk A in Figure 1 is not essential, as it can be homotoped onto thesection of the boundary of the manifold cut out by ∂A, while B is essential.
Theorem 3.4 ([3]). A knot K can be unknotted if and only if MK, the knot com-plement manifold, contains an essential disk.
So now we can express the unknot recognition problem as, given a knot comple-ment manifold, checking whether or not that manifold contains an essential disk. Wewish to describe how one would do this, and assess how effective that algorithm is.
4 Computational complexity
When given an algorithm for a problem, we can describe how fast it is by how itsrunning time grows as the size of the input n grows. This is effective as it doesnot vary with the hardware, language or details of implementation used to run thealgorithm. Let the maximum number of steps taken for the algorithm to run for aninput size n be M(n). We write that an algorithm is O(f(n)), for f a function of
the input size, if lim supn→∞M(n)f(n)
<∞.Complexity classes let us classify how difficult problems are. A decision problem
is in class P if there is some algorithm to solve the problem that is O(P (n)) forP (n) a polynomial function. A decision problem is in NP if, if for some input theanswer is ‘yes’, we can give a certificate to prove this is correct that can be verifiedin polynomial time.
For example, consider the decision problem of checking whether there exists atimetable with no clashes for some set of rooms, students, lecturers and classes. This
3

Figure 2: A one tetrahedron triangulation of the solid torus.
is a difficult problem to solve. However, if such a timetable does exist, the certificatethat consists of that timetable can be checked in polynomial time to indeed have noclashes.
Unknot recognition is known to be in NP, as we will show in Section 5.
5 Normal surfaces
To check whether or not a given knot complement manifold contains an essentialdisk, we need a way of concisely describing surfaces in a manifold. Normal surfacesare one method of doing this.
Note that we can triangulate the knot complement manifold – that is, we candivide it into tetrahedra. For example, the knot complement manifold of S1 in S3 isagain a solid torus. We can triangulate this using one tetrahedron by Figure 2, withface (023) joined to face (312).
Definition 5.1. A normal surface in a triangulated 3-manifold M is a surface Sembedded in M , with boundary on the boundary of M , such that the intersectionof S with any tetrahedron in the triangulation is a finite union of triangles andquadrilaterals.
For example, Figure 3 shows a normal surface within the triangulated torus, andhow it looks in a drawing of the solid torus. The normal surface caps off the onevertex on the boundary of the torus.
Given a normal surface S in a triangulation of M , we can describe this surfaceby listing how many of the four triangle types and three types of quadrilaterals it
4

Figure 3: A normal surface, (a) presented as triangles in the triangulated solid torus,and (b) drawn in the solid torus.
5

forms in each tetrahedron. For example, the surface in Figure 3 consists of one ofeach of the types of triangles in the one tetrahedron.
For a surface S in a triangulation consisting of t tetrahedron, this defines afunction v : normal surfaces → Z7t giving a vector describing each surface. Forexample, the surface in Figure 3 can be described by the vector (1, 1, 1, 1, 0, 0, 0), asit has one of each triangle and no quadrilaterals. This description is defined for afixed ordering of tetrahedron and ordering of types of triangle and quadrilateral.
Theorem 5.2 ([3]). Any vector v ∈ Z7t describes a valid (possibly disconnected)normal surface S so long as:
1) all entries in v are non-negative,
2) each tetrahedron contains only one type of quadrilateral (as different typesof quadrilateral must intersect), and
3) if two faces are connected in the triangulation, the edges intersecting thesefaces must match up.
The non-negativity and matching conditions define a cone of potential surfacesin Z7t, while the quadrilateral condition picks out a certain lattice of points withinthis cone. Then we can define an integer basis for this lattice.
Definition 5.3. We call a normal surface S fundamental if it cannot be written asthe sum of two other normal surfaces. That is, if there exist no other surfaces S ′,S ′′ such that v(S) = v(S ′) + v(S ′′).
Now, it remains to show that normal surfaces are a useful way of detecting anessential disk in a knot complement manifold.
Theorem 5.4 ([5], strengthening [3]). If MK is a knot complement manifold, withan associated triangulation, which contains an essential disk, then it contains anessential disk that is a fundamental normal surface.
So if we can check all normal surfaces for an essential disk, we can solve theunknot recognition problem.
6 Unknot recognition is in NP
Hass, Lagarias and Pippenger used this approach to show that unknot recognitionis in NP, by a bound on the size of the fundamental normal surfaces.
6
Theorem 6.1 ([4]). Let M be a triangulated compact 3-manifold, that contains ttetrahedra in the triangulation. Then the entries of the vector describing any funda-mental normal surface in M are bounded by t27t+2 − 1.
This then gives the following algorithm for checking whether a given knot K isunknottable, with input size n the number of crossings in K:
1) Produce a triangulation of the knot complement manifold MK . This can bedone in polynomial time in n to have a number of tetrahedra t that is boundedby a polynomial function of n.
2) Generate all possible descriptions of fundamental normal surfaces in MK –that is, all vectors in Z7t with entries between 0 and t27t+2 − 1.
3) For each of these vectors, check if:
a) the vector satisfies the quadrilateral and matching conditions, so is avalid normal surface,
b) the vector is a disk, for which it is sufficient to check the surface has onepuncture and Euler characteristic 1 as all fundamental normal surfacesare connected, and
c) the vector describes an essential disk, which is a condition on the ho-mology class of the boundary of the surface.
4) If one of these vectors did describe an essential disk, the knot is the unknot;otherwise, it is not.
All of these steps, aside from looking at every possible fundamental normal sur-face, take polynomial time in the crossing number of the original knot. Now, if theknot is equivalent to the unknot, we can give a polynomial time certificate for this:describe the triangulation and give the vector describing the essential disk. The sizeof the vector is bounded by the product of the number of entries and the logarithmof the maximum entry size, which is 7t log2(t2
7t+2−1) which is O(t2). Then checkingthe triangulation is correct and that the vector does indeed describe an essential diskare both polynomial time in t which is itself a polynomial function of n. This gives:
Theorem 6.2 ([4]). Unknot recognition is in NP.
7
This simple algorithm can be substantially improved on. The approach of con-sidering all vectors with entries up to t27t+2 − 1, of which there are O(t7t249t2+14t),is unneccessary. The number of candidates for the essential disk was reduced in thesame paper to O(128t) [4], and has more recently been reduced to O(15t) [1].
We also have another result on the complexity of unknot recognition, that
Theorem 6.3 ([7]). Knot recognition is in NP. Equivalently, unknot recognition isin co-NP.
As unknot recognition is in both NP and co-NP, it is a good candidate to be inP. An intermediate step to showing unknot recognition to be in P is to show that itis fixed-parameter tractable.
Definition 6.4. A problem is fixed-parameter tractable (FPT) in a variable (thatis not the input size) if, letting the input size be n and the variable be k, the problemcan be solved in O(P (n)f(k)) for P (n) a polynomial function.
For example, the vertex cover problem – answering whether, for a given graphwith n vertices, there exists a subset of vertices of size at most k such that everyedge has at least one end in the subset – is FPT in k. (There is an algorithm thatis O(2kn).)
Trivially, if a decision problem is in P it is FPT in any variable k, as its complexitycan be written as O(P (n)k0). So finding that unknot recognition is FPT would befurther encouragement that it is potentially in P.
7 Approaches to showing unknot recognition is
fixed-parameter tractable
We primarily explored showing that unknot recognition is fixed-parameter tractablein the cutwidth of the dual graph of the triangulation.
Definition 7.1. For some ordering o in the set of orderings O of the vertices V ofa graph, and some fixed vertex v, let c(o, v) be the number of edges that pass fromvertices after v in the ordering to v and the vertices before it. Then the cutwidth ofa graph is mino∈O maxv∈V c(o, v).
For example, the cutwidth of the dual graph of any layered solid torus is 2. (See[6] Section 4.2 for a discussion of layered solid tori, and Regina for easily generatingtriangulations of them.)
8

The idea was to build surfaces as we built the triangulation, extending them eachtime a new tetrahedron was added, such that the size of the set of surfaces we werekeeping track of at any point was FPT. Additionally, all that is required is a FPTdescription of the surfaces, rather than a FPT set of surfaces themselves, so longas this description gives enough information to be able to check if anything in thedescribed set is the essential disk.
We focused on finding a way of describing all normal surfaces that are puncturedspheres. Note that a disk is a sphere with one puncture. A surface is a puncturedsphere if it has no genus and is orientable. Equivalently, a surface is a puncturedsphere if it has p disconnected boundary components, and Euler characteristic 2− p.
Note that we can always build punctured spheres out of pieces that all have nogenus and orientable, so a description of all the punctured spheres in a triangulatedmanifold should be enough information to allow us to generate a description of allthe punctured spheres in that manifold with one tetrahedron added without havingto examine all of the original manifold.
Describing punctured spheres as sums of normal surfaces
We looked at describing punctured spheres as sums of the fundamental normal sur-faces.
For example, consider the 1,2,3-layered torus, depicted in Figure 2 and triangu-lated by one tetrahedron with face (023) joined to face (312). This manifold hasfour fundamental normal surfaces: α, a Moebius band that caps an edge with Eulercharacteristic χ = 0, β, an orientable surface that caps another edge with χ = 0, γ,the essential disk with χ = 1, and δ, the vertex link with χ = 1. Now, there are twotypes of surfaces that have p punctures and χ = 2− p. These are aα+ bβ such thatgcd(2a, b) = 2 and aα + γ with a even.
However, this description has a substantial problem: the number of fundamentalnormal surfaces grows exponentially with t, the number of tetrahedra. We considereddescribing the fundamental surfaces by their Euler characteristic and the number oftimes they cross each edge on the boundary, which is sufficient to determine whethera sum of surfaces is a punctured sphere. However, the number of crossings can alsogrow exponentially with t, so while this reduces the number of surface descriptions,it does not make it FPT.
This approach also has another issue: though we can guarantee that sums offundamental normal surfaces satisfy the non-negative and matching conditions, theymay have intersecting quadrilaterals (violating condition 2 in Theorem 5.2) so notbe valid normal surfaces. This can happen in two ways, producing either immersed
9
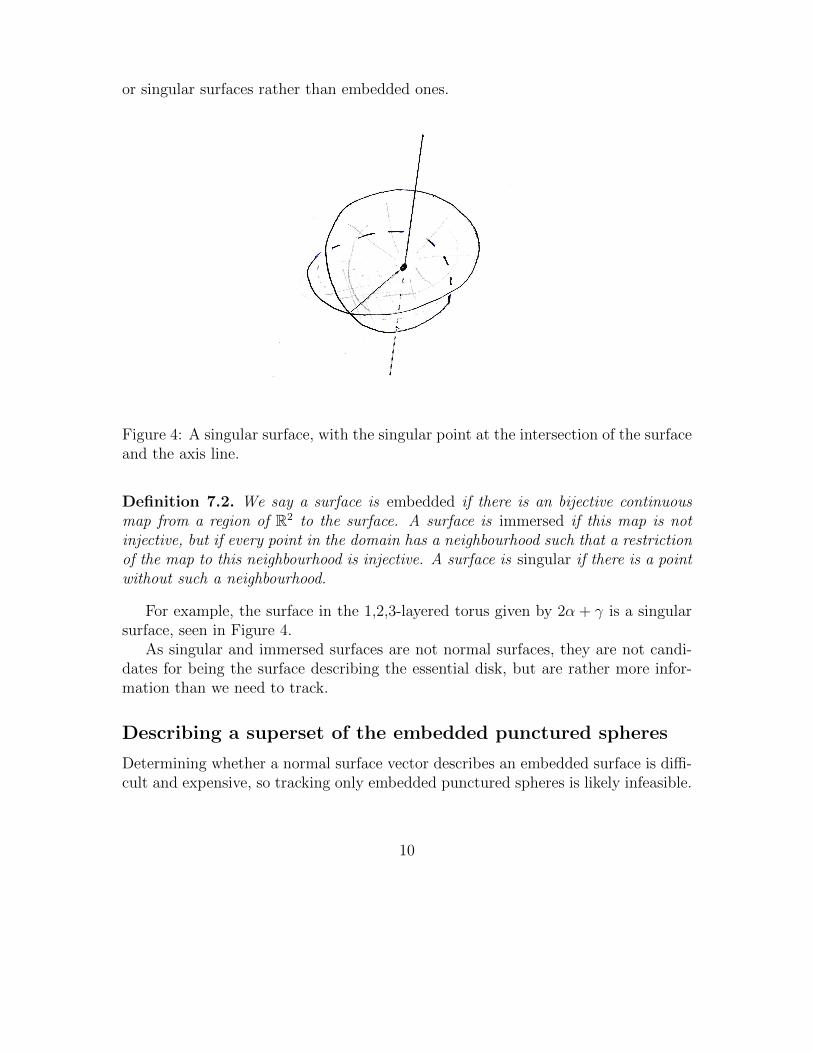
or singular surfaces rather than embedded ones.
Figure 4: A singular surface, with the singular point at the intersection of the surfaceand the axis line.
Definition 7.2. We say a surface is embedded if there is an bijective continuousmap from a region of R2 to the surface. A surface is immersed if this map is notinjective, but if every point in the domain has a neighbourhood such that a restrictionof the map to this neighbourhood is injective. A surface is singular if there is a pointwithout such a neighbourhood.
For example, the surface in the 1,2,3-layered torus given by 2α + γ is a singularsurface, seen in Figure 4.
As singular and immersed surfaces are not normal surfaces, they are not candi-dates for being the surface describing the essential disk, but are rather more infor-mation than we need to track.
Describing a superset of the embedded punctured spheres
Determining whether a normal surface vector describes an embedded surface is diffi-cult and expensive, so tracking only embedded punctured spheres is likely infeasible.
10

Instead, we attempted to describe a set of punctured spheres containing the set of em-bedded punctured spheres. Having some singular and immersed punctured spheresin this set is not an issue, by Dehn’s Lemma.
Theorem 7.3 (Conjectured by Dehn, 1910; proved Papakyriakopoulos, 1957). LetM be a 3-manifold, with f : S1 → M a continuous map taking ∂D to ∂M , andwith f restricted to a neighbourhood of ∂D injective. Then there exists f ′ : S1 →Man injective continuous map, such that f ′ and f are identical on a neighbourhoodof the boundary of the disk. (That is, suppose we have a disk in a 3-manifold withsingularity on the interior of the disk. Then there exists a properly embedded disk inthe 3-manifold with the same boundary.)
So if, looking at a description of punctured spheres in a manifold, the essential diskcandidate we pick out is actually self-intersecting, we still have proof that there existsa properly embedded essential disk, as the singularity will occur in the intersectionof quadrilaterals which occurs in the interior of tetrahedra.
Unfortunately, even describing this smaller set of punctured spheres can be diffi-cult. Adding on a new tetrahedron that connects to the existing manifold at only oneface and extending a set of punctured spheres through this tetrahedron is straightfor-ward. For each punctured sphere, we can take all non-intersecting ways of continuingits edges that hit the face that is connected to the new tetrahedron. The interest-ing cases, then, are adding on a new tetrahedron that connects on multiple faces,which is equivalent to adding a new tetrahedron on one face, then connecting pairsof unmatched faces of the manifold.
However, when this operation creates a ‘bridge’ in the manifold, it can allow alarge, difficult to describe family of punctured spheres to appear. For example, inthe torus, all torus knots can be thickened to an annulus, and there is a distincttorus knot for every pair of coprime integers. Additionally, in some cases, joiningeven two faces of disconnected manifolds (so not producing this bridge) can producean infinite number of punctured spheres from a finite number in each manifold. Sothis approach, too, does not look useful.
Future directions
Given that these direct approaches to describing punctured spheres have been un-successful, a promising future direction for research would be to look at the algebraicstructure given by punctured spheres. We can consider punctured spheres as sur-faces determined by the boundaries of their punctures p1, . . . , pn, with a puncturedsphere satisfying p±11 p±12 · · · p±1n = 1. This structure is simpler than the fundamental
11

group, as the puncture boundaries are always disjoint. However, not all such listsof boundaries describe a punctured sphere (for example, consider a manifold madeof two disconnected pieces, and a boundary in each of them). Using combinatorialgroup theory to study this structure would bring a new set of tools to the problem.
12

Acknowledgements
I would like to thank my supervisor, Dr Ben Burton, for his continual support andencouragement, and for taking the time from his summer to supervise a studentfrom another university. I would also like to thank AMSI for funding the project,the organisers of the MATRIX introductory workshop on topology in December 2016for allowing me to attend, and the participants in the MATRIX workshop and theMSI workshop on low-dimensional topology at ANU in November for the opportunityto learn about current research in the field.
13

References
[1] Burton, B.A. 2011. Maximal admissable faces and asymptotic bounds for thenormal surface solution space. J. Combin. Theory Ser. A 118(4), pp. 1410-1435.
[2] Burton, B.A., Budney, R., and Pettersson, W., et al., 1999-2016. Regina: Soft-ware for low-dimensional topology, http://regina-normal.github.io/.
[3] Haken, W. 1961. Theorie der Normalflachen, ein Isotopiekriterium fur denKreisknoten. Acta Math 105, pp. 245-375.
[4] Hass, J., Lagarias, J.C., and Pippenger, N. 1999. The computational complexityof knot and link problems. J. ACM 46(2), pp. 185-211.
[5] Jaco, W., and Tollefson, J. L. 1995. Algorithms for the complete decompositionof a closed 3-manifold. Illinois J. Math. 39, pp. 358-406.
[6] Jaco, W., and Rubinstein, J.H. 2006. Layered-triangulations of 3-manifolds.Preprint at https://arxiv.org/abs/math/0603601.
[7] Lackenby, M. 2016. The efficient certification of knottedness and Thurston norm.Preprint at http://people.maths.ox.ac.uk/lackenby/knp30316.pdf.
14


















