
The Twin Paradox Plus One
25
The Twin Paradox Plus One by Gabe Czobel Abstract: The so called “twin paradox” has been a fascinating and controversial aspect of Einstein's theory of Special Relativity ever since its inception and still generates much interest. There have been many varied explanations proposed along the way that vindicate Einstein's contention. One such qualitative explanation, exemplified by Lewis C. Epstein in his book, Relativity Visualized, adopts the position, also taken by Einstein, that symmetry between the twins is broken on account of the travelling twin undergoing acceleration not experienced by the Earthbound twin. While still working within Epstein's visual paradigm, I here take a more quantitative approach, limiting the clarification of the “paradox” to strictly SR, with no recourse at all to acceleration. Dedication: To my late friend Kip Rugger, who would have undoubtedly appreciated the spirit of this little exercise. Introduction Time dilation, the notion that the time kept by a clock moving at a uniform speed is seen by an observer O 1 at rest to proceed at a different rate than that observer's own clock, is a fundamental consequence of the theory of Special Relativity (SR). Specifically, the observer at rest will see the time on the moving clock to proceed at a slower rate than his own clock, and the decrease in the rate of time passage on the moving clock is a function of its speed relative to the observer at rest. But SR has it that there are no absolute frames of reference when it comes to uniform motion; that is, there is no absolute inertial frame of reference. Hence, the above scenario contains a symmetry such that, for an observer O 2 who is moving along with the clock, it is the aforementioned stationary observer O 1 that is in uniform motion in the opposite direction, and it is O 1 's clock that is slowed down by the same amount with respect to O 2 's clock! If the two observers go on their ever separating merry way forever, there is no problem since they will never compare clocks. But here's the rub! What if O 2 decides to turn around and come back to O 1 to compare clocks? On the return journey, there will again be a uniform motion of the two observers with respect to each other, and both again will claim that it's the other's clock that is running slow. The time of reckoning will come when the two observers compare clocks, since both cannot show an earlier or later time than the other. And this is the twin paradox in a nutshell, which is usually depicted as the thought experiment of one twin departing Earth in a rocket capable of travelling at a significant fraction of light speed, turning around at a nearby star, and returning to Earth to rejoin the twin that stayed behind. Einstein maintained that, according to SR, the travelling twin will return younger than the Earthbound sibling but the above scenario of the clocks seems to cast doubt on this and perhaps on the very contention that time dilation is real. As is often the case with seemingly contradictory conclusions, the devil is in the details. The simplified clock or twin scenario does turn a blind eye to the fact that the travelling twin needs to reverse his motion, requiring some form of acceleration, or at the very least, some sort of “jump” in his inertial frame of reference. The stay-at-home twin, meanwhile, needs perform no such relativistic acrobatics. This immediately breaks the symmetry of mutually contradictory time dilation suggested by the simple clock scenario. But this only suggests a qualitative explanation without providing a way to calculate, at least in SR, what age difference exists when the twins are reunited and without confirming that, according to SR, both twins would agree to the amount of age difference, each according to his own clock.
description
The so called “twin paradox” has been a fascinating and controversial aspect of Einstein's theory of Special Relativity ever since its inception and still generates much interest. There have been many varied explanations proposed along the way that vindicate Einstein's contention. One suchqualitative explanation, exemplified by Lewis C. Epstein in his book, Relativity Visualized, adopts the position, also taken by Einstein, that symmetry between the twins is broken on account of the travelling twin undergoing acceleration not experienced by the Earthbound twin. While still working within Epstein's visual paradigm, I here take a more quantitative approach, limiting the clarification of the “paradox” to strictly SR, with no recourse at all to acceleration.
Transcript of The Twin Paradox Plus One

The Twin Paradox Plus Oneby Gabe Czobel
Abstract:The so called “twin paradox” has been a fascinating and controversial aspect of Einstein's theoryof Special Relativity ever since its inception and still generates much interest. There have beenmany varied explanations proposed along the way that vindicate Einstein's contention. One suchqualitative explanation, exemplified by Lewis C. Epstein in his book, Relativity Visualized, adoptsthe position, also taken by Einstein, that symmetry between the twins is broken on account of thetravelling twin undergoing acceleration not experienced by the Earthbound twin. While stillworking within Epstein's visual paradigm, I here take a more quantitative approach, limiting theclarification of the “paradox” to strictly SR, with no recourse at all to acceleration.
Dedication: To my late friend Kip Rugger, who would have undoubtedly appreciated the spirit ofthis little exercise.
Introduction
Time dilation, the notion that the time kept by a clock moving at a uniform speed is seen by anobserver O1 at rest to proceed at a different rate than that observer's own clock, is a fundamentalconsequence of the theory of Special Relativity (SR). Specifically, the observer at rest will see thetime on the moving clock to proceed at a slower rate than his own clock, and the decrease in the rateof time passage on the moving clock is a function of its speed relative to the observer at rest. ButSR has it that there are no absolute frames of reference when it comes to uniform motion; that is,there is no absolute inertial frame of reference. Hence, the above scenario contains a symmetry suchthat, for an observer O2 who is moving along with the clock, it is the aforementioned stationaryobserver O1 that is in uniform motion in the opposite direction, and it is O1 's clock that is sloweddown by the same amount with respect to O2 's clock! If the two observers go on their everseparating merry way forever, there is no problem since they will never compare clocks.
But here's the rub! What if O2 decides to turn around and come back to O1 to compare clocks? Onthe return journey, there will again be a uniform motion of the two observers with respect to eachother, and both again will claim that it's the other's clock that is running slow. The time of reckoningwill come when the two observers compare clocks, since both cannot show an earlier or later timethan the other. And this is the twin paradox in a nutshell, which is usually depicted as the thoughtexperiment of one twin departing Earth in a rocket capable of travelling at a significant fraction oflight speed, turning around at a nearby star, and returning to Earth to rejoin the twin that stayedbehind. Einstein maintained that, according to SR, the travelling twin will return younger than theEarthbound sibling but the above scenario of the clocks seems to cast doubt on this and perhaps onthe very contention that time dilation is real.
As is often the case with seemingly contradictory conclusions, the devil is in the details. Thesimplified clock or twin scenario does turn a blind eye to the fact that the travelling twin needs toreverse his motion, requiring some form of acceleration, or at the very least, some sort of “jump” inhis inertial frame of reference. The stay-at-home twin, meanwhile, needs perform no suchrelativistic acrobatics. This immediately breaks the symmetry of mutually contradictory timedilation suggested by the simple clock scenario. But this only suggests a qualitative explanationwithout providing a way to calculate, at least in SR, what age difference exists when the twins arereunited and without confirming that, according to SR, both twins would agree to the amount of agedifference, each according to his own clock.
The SR paradigm devised by Lewis Carroll Epstein [1] provides an insightful perspective by whichwe can visually and geometrically demonstrate the resolution of the “twin paradox” and in aquantitatively satisfying manner to boot, yet without resorting to acceleration. As a preamble then,let's take a brief survey of the Epstein paradigm.
The Epstein Paradigm
Special Relativity is all about how observers in one frame of reference “see” the goings-on inanother frame of reference where the two frames are in uniform motion with respect to each other.Of paramount importance is how observers in each frame “see” the clocks and meter sticks in theother frame. The effects on these mutual “observations” due to SR do not become significant untilthe relative motion of the two frames is a substantial portion of light speed. But light itself is themedium of observation so it would significantly complicate matters for just one observer to try tosee what is happening in another moving frame at any location other than his immediate vicinity(i.e. right in front of his nose) where the signal delay of light from the observed to the observer canbe reduced to insignificance. One way of getting around this complication is for the observer todistribute “recording clocks” throughout his own frame where the recording clocks are allsynchronised and stationary with respect to each other and the observer. These clocks would be ableto record goings-on in their own vicinity with insignificant signal delay. This is made clear inSpacetime Physics [2], as the authors explain,
“In relativity we often speak about 'the observer.' Where is this observer? At one place or allover the place? The word 'observer' is a shorthand way of speaking about the wholecollection of recording clocks associated with one inertial frame of reference. No one realobserver could easily do what we ask of the 'ideal observer' in our analysis of relativity. So itis best to think of the observer as the man who goes around picking up the punched cardsturned out by all the recording clocks in his employ. This is the sophisticated sense in whichwe will hereafter be using the phrase 'the observer finds such and such.' “
And Epstein expresses the same notion thus:
“Everyone knows about and allows for all these signal transmission delay time effects.There is nothing new here. There are two ways to dispose of them: (1) Subtract the delaytime from the apparent time, or, easier yet, (2) get so close to the happening that you canforget about the delay. If you are close enough to the lightning, the thunder is not delayed.
Sometimes a happening involves two places, like a starting line and a finishing line. Howcan you be very close to both? You can't. So you must have a team of assistants called localobservers. Everyone watches what he is assigned to watch up close, thereby eliminatingdelay time. After the happening, all assistants mail in their notes and you work out exactlywhat happened. You make your measurements from the collection of notes.“
I cannot overemphasize how important this notion is to making sense of mutual observationsbetween moving frames of reference, without which one would get tied up in mental knots trying tounderstand how an observer can “see” undistorted what is going on even in his own frame ofreference but perhaps light-years distant. Instead of “recording clock” or “local observer”, I will usethe term “agent.” Each frame of reference is to be considered as spatially permeated with agentswho are stationary with respect to each other, know their positions in this frame of reference, andhave clocks that have been synchronised with each other. That is, when agent An near AlphaCentauri A sees that his clock reads noon, he knows that the clock of agent A0 on Earth also readsnoon and vice-versa.
With this understanding firmly in mind, let's examine Epstein's paradigm, or “myth” as he calls it,in his own words:

“Why can't you travel faster than light? THE REASON YOU CAN'T GO FASTER THANTHE SPEED OF LIGHT IS THAT YOU CAN'T GO SLOWER. THERE IS ONLY ONESPEED. EVERYTHING, INCLUDING YOU, IS ALWAYS MOVING AT THE SPEED OFLIGHT. How can you be moving if you are at rest in a chair? You are moving through time.“
The last sentence is a little perplexing because “motion” through time would imply that there couldbe a rate of motion through time; which then begs the question of a rate against what other variable,since rate of motion is typically a change in something per unit time itself! This quandary isresolved by examining the diagrammatic depiction of Epstein's “myth.” The diagram is a twodimensional co-ordinate system as shown below.
Fig. – 1: The basic Epstein co-ordinate system.
The vertical axis measures proper time and the horizontal axis measures a single dimension ofspace along which uniform motion may take place. For ease of use, the units of measurement aresuch that the speed of light comes out to 1. For instance, the proper time could be in seconds andspace could be in light-seconds, but the actual units are not important.
This co-ordinate system depicts what is measured by agents situated at rest along the single spaceaxis. That is, it depicts the rest frame of these agents lined up in a straight row, with agent A0 at theorigin and extending to infinity in both directions. Objects, other agents, or light itself, could bemoving with respect to the stationary agents along the same space direction as the row of agents.Such motion is depicted by an arrow from the origin terminating on a circle of a particular radius.The length of this arrow is also in units of time, as measured by the clocks of the agents at restalong the space axis.

Now we can see what Epstein means that everything moves at the speed of light. If the radius of thecircle is 1 unit of time, all objects, even light, will be depicted by some arrow that reaches thecircumference of the circle in that time, as measured by the clocks of the agents at rest along thespace axis; but the arrow is at different angles with respect to the axes. A beam of light is depictedby an arrow directly along the space axis, terminating its travel at 1 unit of space. It travels 1 unit ofspace in the time depicted by the 1 unit of the circle radius; hence its speed, entirely spatial, is 1 (thespeed of light). The “motion” of agent A0 , at rest at the origin, is depicted by an arrow, also 1 unitlong, that has “moved” through 1 unit of proper time in the span of the 1 unit of time depicted bythe length of the arrow. Hence, its “speed”, entirely through proper time, is also 1, the speed oflight. This now explains how we can have a rate of “motion” through time; it is really motionthrough proper time measured along the vertical axis per unit of time measured by the length of thearrow.
Other objects, moving along the row of agents at speeds less than the beam of light, are depicted asarrows 1 unit long somewhere between the two extremes. These objects move, during the 1 unit oftime depicted by the arrow length, a certain amount in the space direction, but also “move” acertain amount through the proper time direction, such that the vector sum of these two motionsover 1 unit of arrow time adds up to 1. Hence these objects also move at light speed.
The obvious question about this diagram is why there are two “types” of time depicted, one by thelength of arrows and the other by the vertical axis. This is because the notion of a universallypervasive absolute time has fallen by the wayside consequent to SR. Now there are two flavours oftime; there is co-ordinate time, which is used by agents, using multiple synchronised clocksstationary with respect to the agents, to deduce the time interval between two events observed bythem in their own frame of reference and represented by the length of arrows; and there is propertime, which measures the time that the stationary agents observe to pass on any single clock movingalong with other frames of reference. In one's own frame of reference, co-ordinate time equalsproper time, since all motion is through time and none through space.
It needs to be emphasized, as we will see further below, that the Epstein diagram is not your typicalspace-time diagram where the co-ordinate time is normally the vertical axis and points are space-time events! Viewing it this way is certain to lead to confusion. The Epstein diagram is a clever wayof visually depicting and calculating the observed time dilation (proper time) of frames of referencemoving with respect to the agents at rest on the space axis (see Appendix, under I - The Light Clockand Time Dilation). The speed of the moving frame of reference, considered as a fraction of thespeed of light, is represented by the sine of the angle that its arrow makes with the vertical axis. Ifthe angle is 0, the frame of reference is at rest with respect to the agents. If the angle is π/2 , thearrow represents a moving frame that travels at the speed of light with respect to the agents. Thevalue of sin π/2 being a maximum guarantees that nothing moves faster than light in any frame.
The length of the arrows depicting the moving frame represents the time measured by thestationary agents' clocks as objects in the moving frame cover some span of space betweenstationary agents, measured as the space component of the arrow along the space axis. This distanceis the length of the arrow times the sine of the above angle. To measure the proper time “moved” bythe clocks in the moving frame during the above spatial motion, one takes the length of the arrowtimes the cosine of the angle, the proper time component of the arrow. It's that simple.
But wait! It gets better. Not only can the diagram be used to visualise the change in proper time ofclocks in motion along the space axis, but it can also be used to visualise the concept of relativisticlength contraction, all in one fell swoop. To see this, we extend the Epstein diagram by twoadditional axes to represent the moving frame. The arrow of the moving frame is extended in bothdirections to form the proper time axis of the moving frame and a space axis is drawn perpendicularto this to represent the space dimension of the moving frame thus:

Fig. – 2: The extended Epstein co-ordinate system.
The moving frame B is thus represented by a co-ordinate system rotated with respect to thestationary co-ordinate system by the angle that represents the relative speed between them, asdescribed above. Agents in frame A are distributed along the spatial axis SA and agents (and theirclocks!) moving along with frame B are distributed along the spatial axis SB . The red arrow depicts

the motion of agent B0 as observed by the A agents, from the instant of being face-to-face withagent A0 at the origin, to the time that the A agents clocks read the value equal to the length of thearrow.
One needs to resist the impression that another spatial dimension has been introduced by thisrotation! The physical fact of the matter is that the two rows of agents along SA and SB are still linedup, nose to nose, along a single spatial dimension, where the two rows are moving past each other ata uniform rate.
Fig. – 3: The physical spatial configuration of two frames.
The superimposed bi-frame Epstein co-ordinate system of Fig. – 2 represents not a direct physicalconfiguration but a mathematical convenience. We represent the origins of the two co-ordinatesystems as intersecting. What this means in physical terms is that, as the two rows of agents movepast each other along a single spatial dimension as in Fig. - 3, there exists at some instant, aconfiguration where agent A0 is nose-to-nose with agent B0, and both of their clocks are set to 0 bysome pre-arranged agreement. I will henceforth represent such physical nose-to-nose encounters bythe notation Ai X Bj . At such coincidences, on account of their physical proximity, agent Ai
accurately observes and records the goings-on about agent Bj , and vice-versa, as remarked earlier.
To calculate the passage of proper time on a clock belonging to any agent Bj , moving to the right asobserved in frame A, one draws an arrow as in Fig. – 2 on a line through the Bj spatial co-ordinateposition measured by axis SB and parallel to the proper time axis τB . This arrow represents themotion of agent Bj as observed in frame A, with the length of the arrow being the time recorded byA agents on their own clocks as Bj moves the distance along SA given by the length of the arrow xsin α. Agents A also note the time elapsed on the clock carried by Bj (B proper time) during thismotion as the arrow length x cos α , that is, measured as the projection of the arrow onto the propertime axis τA . In addition, A agents also measure the length of a meter stick carried by Bj as beingcos α of a meter long, that is contracted. The meter stick is depicted to lie along SB but is measuredby A agents as its projection along SA to give the length as noted by the A agents. This is relativisticlength contraction and is explained below in the Appendix, under II - Length Contraction. In asymmetrical manner, the B co-ordinate system, taken as the rest frame, may be used to calculatehow B agents see the passage of time on the clocks carried by the A agents, moving to the left asobserved in frame B , and calculate how the B agents measure the meter sticks carried by A agents.Thus, the Epstein diagram embodies the perplexing mutual symmetry that observers measure aboutthe goings-on in frames of reference in uniform motion with respect to each other.
It was noted earlier that all the agents at rest with each other in a frame of reference have theirclocks synchronised. Thus, in frame A, all agents, no matter how great their separation, will alwaysagree what time it is throughout frame A just by looking at their own local clock. This also goes forall agents in frame B with respect to each other. But do all agents in both frames, as they coincidewith their counterparts in the other frame, agree with each other's clocks? Well, agents A0 and B0,

will agree that their local clocks both read 0 when nose-to-nose, by previous agreement. But noneof the other agents will agree as they come nose-to-nose with their counterparts in the other frame.This is clarified in the Appendix, under III - Simultaneity and Time De-synchronisation .Fortuitously, the superimposed bi-frame Epstein co-ordinate system represents this information aswell, and more!
Fig. – 4: Reading each other's clocks.
Let's assume that the spacing between corresponding agents in each frame, as determined by theirown meter sticks, is uniform and the same. That is, the distance between A0 and A1 as measured inA is the same as the distance between any Ai and Ai+1 and the same as the distance between any Bi
and Bi+1 as measured in B. I'll represent the distance between Am and An by the notation AmAn
From the observations of agents in frame A, at the physical configuration where A0 X B0 , all agentsin A will read their own clocks as 0. But the diagram shows that agent B1 is not observed by A1 tobe nose-to-nose with A1 when A1 's clock reads 0 on account of the contraction of distance betweenB agents as observed by A agents. In fact, A1 observes that he is opposite some spot B1+ betweenB1 and B2 . As the diagram shows, this spot ( A1 X B1+) is determined by dropping a line from A1 onSA parallel to τA and intersecting SB at B1+ . And what does agent A1 see on the clock of agent B1+
when nose-to-nose? This is determined by dropping a perpendicular line from the point A1 X B1+ toτA as shown. This clock reading t1 is clearly less than 0, the reading of agent A1's clock at thiscoincidence. In fact, this represents how A agents see the clocks of B agents as de-synchronisedwhen their own clocks show a simultaneous time and vice-versa!
And this now establishes the meaning of any individual point on such a bi-frame diagram. At thephysical coincidence A1 X B1+ , the reading of A1 's clock, which is 0, is read off axis τB and thereading of B1+ 's clock is read off τA ! We can see that this works for A0 X B0 as well, both theirclocks reading 0 since they are at the origin of the axes. And any individual point on this diagramrepresents a unique Ai X Bj encounter, as determined by dropping a perpendicular from the point toAi on the SA axis and to Bj on the SB axis respectively. The readings of their clocks at thiscoincidence are determined by dropping perpendiculars to τB and τA to show t3 and t2 ,respectively.No, that's not a misprint! The reading on Ai 's clock t3 , is read off the τB axis and the reading onBj 's clock t2 , is read off the τA axis!
Now, such cross-reading of axes is very counter-intuitive, especially if one is used to conventionalspace-time diagrams! Specifically, we measure the spatial location of the coincidence pointaccording to the space axis of one frame but the reading of the clock located at that point by theproper time axis of the other frame. But we can see that such coincidences are frame independent,unique, and absolute. They are real unique physical encounters and are of great value in using theEpstein diagram in understanding relativistic effects! Regardless of mutually opposite lengthcontraction and time dilation, any two agents, one from each frame, will encounter each other inonly one unique physical event of proximity and will observe and agree on the reading of eachother's clocks at the point of this encounter.
There is one more calculation that we need to glean quantitatively from the Epstein diagram. Howdo we add velocities correctly? We know from SR that no object or signal will travel faster thanlight. But if frame B travels, say, 3/4 light speed with respect to frame A, and frame C travels 3/4light speed with respect to frame B along the same direction, does frame C travel 1 1/2 light speedwith respect to frame A? Epstein explains qualitatively that, no, the speed of C with respect to A isstill less than light speed. But we need a quantitative answer to this question to explain the twinparadox, or more correctly, we need to know what the speed between B and C is, given that weknow the speed between A and B and between A and C. This is worked out using the Epsteinparadigm in the Appendix under IV – Relative Speeds .

Unravelling the Paradox
We now have enough ammunition to tackle the twin paradox. In order to do that without recourse tothe necessary acceleration as the rocketing twin turns around at the outermost part of his journey,we re-frame the scenario as one concerning zygotic triplets. Three genetically identical zygotes,obtained by cloning, are frozen and located in three environments; two are on rocket ships and oneremains on Earth.
One rocket labelled B remains close to Earth while the other, labelled C, is sent into a position indeep space, where all the while the zygotes remain frozen. The rockets and the Earth remain at restwith respect to each other for a while and their clocks are synchronised in a manner that anyspatially distributed agents, who are at rest with respect to the Earth, may employ. At a pre-arrangedtime, the two rockets start to speed directly towards each other, attaining equal uniform speeds, suchthat the Earth is positioned along their line of motion, while making allowances to avoid a head-oncollision and ignoring the effects of Earth's gravity. In this advanced technological environment, thezygotes are unfrozen and allowed to develop. For the sake of this thought experiment, let's envisagethe remarkable co-incidence that each zygote reaches birth maturity at one instant as measured bysynchronised clocks stationary with respect to the Earth, which we call frame A. At that veryinstant, rocket B zips past the Earth at full speed and rocket C zips at the same speed past agent An ,who is out in deep space but stationary with respect to Earth. Agent An notes that his clock reads 0and agent C0 on the rocket also sets his clock to 0 at the moment of this coincidence. Agent A0 backon Earth also notes that his clock reads 0 and agent B0 on the passing rocket also sets his clock to 0at the moment of their coincidence. Thus, all these agents' clocks read 0 at the birth of all three ofthe triplets.
Since both rockets are travelling towards each other at the same speed with respect to the Earth, butin opposite directions, they will meet and pass each other exactly halfway between Earth and agentAn , where, by another remarkable coincidence, we find another stationary agent Am ready to recordwhat he observes. We depict these goings-on in Fig. – 5 which is clearly not to scale.
Fig. – 5: Positions of the rockets and Earth.

Looking at this thought experiment of the triplets from a grand perspective stationary with respectto the Earth, it becomes clear that all the elements of the original twin scenario that is at the basis ofthe twin paradox can be exactly extracted but without any need to consider acceleration. Twosiblings are born at the instant that rocket B passes the Earth, one remaining on Earth and the otherspeeding along with the rocket destined for deep space. At the same instant by An's clock, a thirdsibling is born on rocket C. Both rocketing siblings will be exactly the same age, whatever that maybe, by the time they reach and pass each other at agent Am's position, having travelled the samedistance and length of time according to stationary clocks and measurement. Hence, the sibling onrocket C heading towards Earth, could be viewed as an exact stand-in for his sibling on rocket Bwhen both are at agent Am's position. This would be identical, with respect to the rate of ageing, tothe situation of the sibling on rocket B making an instantaneous frame “jump” at this point, withoutresorting to any physical acceleration, and returning to Earth at the same speed at which he washeading out. In other words, the rate of ageing of the travelling sibling would be unaltered andunbroken by this frame jump as seen by agents at rest. When the sibling on rocket C reaches Earthand compares his age with the stay-at-home sibling, it would be exactly as if the sibling on rocket Bhad returned after a kind of directional “reflection” at agent Am's position.
This in itself does not resolve the twin paradox. In order to do that, we need to quantitativelyconfirm that, regardless of which frame we use to make the age calculations, all will agree to thefinal results deduced from the data sent in by all the agents positioned at the various coincidences ofthe actors involved. Given that, there would be no paradox!
Using the Epstein visual paradigm, let's first examine what is observed by the agents in the framepairs A-B, and A-C.

Fig. – 6: Frame A-B and A-C observations.
Agent A0 is at rest on Earth. We see rocket B, represented by the B co-ordinates, heading to the rightat sin α of the speed of light with agent B0 on board. The origins of both co-ordinate pairs are atpoint I which is A0 X B0 , where both agents' clocks read 0 (read off τB and τA axes respectively)and two of the triplets are born.
Agent An , whose clock is synchronised with agent A0's clock, is at rest with respect to Earth and farout in deep space. We see rocket C, represented by the C co-ordinates, heading to the left at sin α ofthe speed of light with agent C0 on board. The origins of the C co-ordinate pair are at point Lwhich is An X C0 , where both agents' clocks read 0 (read off τC and τA axes respectively) and thethird of the triplets is born.

Agent Am is also at rest with respect to Earth, exactly halfway between agents A0 and An , and hisclock is synchronised with theirs. Since triangle IKL is isosceles, t3 = t4 , the time taken by bothrockets to meet at agent Am 's location by his clock. Thus, point K represents Am X B0 , where B0 'sclock reads t1 read off τA . Point K also represents Am X C0 , where C0 's clock reads t1 , also readoff τA . Hence, two of the triplets, one on rocket B and one on rocket C , are the same age, that is
(a) t1 = t3 (cos α)
at this mutual point of co-incidence with agent Am . They are also ageing at the same rate as far as Aagents are concerned since their speeds, represented by α, are observed as equal. Agent Am is thussatisfied that triplet B may figuratively pass the “age baton” to triplet C at this juncture.
We can now ignore triplet B and focus on what happens to triplet C afterwards. He continues on toa coincidence with agent A0 at point J after a time equal to KJ by the A agent clocks. But, KJ = t3
by virtue of the isosceles triangle IJK. Thus, the total travel time of rocket C from the position ofagent An to agent A0 , by their own clocks, is 2t3 = LJ. And this is the age of triplet A when hissibling on rocket C whizzes past Earth, since the Earth sibling was born when A0 's clock read 0and synchronised with An 's clock. By time dilation, A agents also agree that the age of triplet C is
(b) t2 = 2t3 (cos α).
How do the C agents observe these events? Point M represents the coincidence A0 X Cp whereA0 's clock reads 0, read off the τC axis and agent Cp 's clock reads t-1 read off the τA axis. WhenCp 's clock reads t-1 , C0 's clock also reads the same, since all agents in each frame have their clockssynchronised as they see it. This is important! As far as the C agents are concerned, the triplet bornon Earth, when A0 's clock reads 0, was born |t-1| units of time before the triplet born on rocket Cwhen C0 's clock reads 0! This is on account of time de-synchronisation.
Starting from the point of coincidence at A0 X Cp , the C agents, considered at rest in their ownframe, observe the Earth triplet to take time MJ , by their own clocks, in heading to the coincidenceat A0 X C0 at point J. By time dilation, the C agents observe that the Earth triplet ages MJ (cos α) =LJ = 2t3 during this trip, exactly as determined by the A agent clocks, as shown above. The Cagents observe that triplet C, born |t-1| units of time after the birth of the Earth triplet, by their ownclocks, would age by MJ - |t-1| = t2 = 2t3 (cos α) units of time up to the coincidence at point J.Again, this agrees with what the A agents observe above.
We further note from Fig. - 6 that,
(c) IL = 2t3 (sin α) and |t-1|/ IL = (sin α) / (cos α)
Hence, (d) |t-1| = 2t3 (sin2 α) / (cos α)
Also, (e) CpC0 = IL / (cos α) = 2t3 (sin α) / (cos α)
The important point to note is that although both the A agents and C agents do calculate mutualtime dilation, leading to the apparent basic quandary of the twin paradox, they still agree on adifference in the age of the triplets when they coincide at point J because they do not agree on thetime when the triplets were born! The A agents observe that both the Earth triplet and the one onrocket C are born simultaneously at time 0 but the C agents observe (as agent Cp reports) that theEarth triplet is born |t-1| units of time before the triplet born on rocket C at time 0!
Of course, these mutually agreed to results could simply be read off the coincidence at point Jrepresenting A0 X C0 , where the clock readings are read off τC and τA axes respectively. We seethat the clock of agent C0 read off τA is indeed t2 = 2t3 (cos α) and the clock of agent A0 is indeed t5
= LJ = 2t3 . Thus, the Earth triplet is older, agreed to by agents in both frames, than the rocket Ctriplet when they pass each other at Earth's location.

Now let's look at what is observed by the agents in the frame pairs B-C, given that we must adjustthe previous diagram to represent the correct speed angle between the co-ordinate axes of B and C.The angle γ that represents the speed between rockets B and C with respect to each other is suchthat
(f) sin γ = [2 sin α] / [1 + (sin2 α)] (see Appendix under IV – Relative Speeds )
where the angle α represents the speed of rockets B and C with respect to the Earth frame ofreference. The points M, K, and L represent the same points of coincidence as in Fig. - 6.
Fig. – 7: Frame B-C observations.
As noted above in Fig. - 6, point M represents the coincidence A0 X Cp where A0 's clock reads 0.And we also know from Fig. - 6 that point I represents the coincidence A0 X B0 , where both agents'clocks read 0. Now agent A0 's clock reads 0 at only one physical point and hence points M and Irepresent a single coincidence event A0 X B0 X Cp . We know from above that at A0 X Cp , Cp 'sclock reads t-1 and this is also what agent B0 will observe at point M in Fig. - 7, which is what willbe read off the τB axis.

We also note from Fig. - 7 that,
(g) CpC0 / LK = (sin γ) / (cos γ)
Hence, (h) LK = CpC0 (cos γ) / (sin γ) = 2t3 (sin α) (cos γ) / (cos α) (sin γ) using (e)
Now (i) cos γ = {1 - [sin2 γ]}1/2
= {1 - [4 (sin2 α) / [1 + (sin2 α)]2 ]}1/2 using (f)
= { [[1 + (sin2 α)]2 - 4 (sin2 α)] / [1 + (sin2 α)]2 }1/2
= { [1 + 2(sin2 α) + (sin2 α)2 - 4 (sin2 α)] / [1 + (sin2 α)]2 }1/2
= { [1 - 2(sin2 α) + (sin2 α)2] / [1 + (sin2 α)]2 }1/2
= { [1 - (sin2 α)]2 / [1 + (sin2 α)]2 }1/2
= [1 - (sin2 α)] / [1 + (sin2 α)]
= (cos2 α) / [1 + (sin2 α)]
Thus, using (f), (h), and (i) we have
(j) LK = 2t3 {(sin α) (cos2 α) / [1 + (sin2 α)]} / 2{(cos α) (sin α) / [1 + (sin2 α)]}
= t3 (cos α) = t8
Also, (k) MK = CpC0 / (sin γ)
= 2t3 (sin α)/ 2{(cos α) (sin α) / [1 + (sin2 α)]} using (e) and (f)
= t3 [1 + (sin2 α)] / (cos α)
Thus, (l) t7 = MK - |t-1|= t3 {[1 + (sin2 α)] / (cos α) - 2(sin2 α) / (cos α)} using (d) and (k)
= t3{[1 - (sin2 α)] / (cos α)}
= t3 (cos2 α) / (cos α)
= t3 (cos α)
Hence, (m) t7 = t8 = t1 using (a),(j), and (l)
We see at point K in Fig. - 7 the coincidence B0 X C0 where their clocks read t8 and t7 respectively.This again is in complete concordance with what was observed for this coincidence in Fig. - 6 bythe A agents. And B0 and C0 agree that their respective triplets are identical in age with value t1 atthis juncture, just as the A agents surmised. As we noted before for the case of the A-C co-ordinatepairs, both the B agents and C agents do calculate mutual time dilation but still agree on theequality of the age of their respective siblings when they coincide at point K because they do notagree on the time when their respective siblings were born! The C agents observe that the B siblingis born |t-1| units of time before the sibling born on rocket C at time 0 and the B agents observe theconverse by symmetry.
We thus see that there really is no paradox even without resorting to the relativistic effects ofacceleration and sticking simply to the consequences due to SR. Even though agents in each frameof reference mutually observe the slowdown of the clocks of the other frame, they still agree on thereading of the clocks at various coincidences. The reason for this is that events that are taken assimultaneous in one frame are not observed as simultaneous when observed from another frame.The paradox appears to arise only when one considers just mutual time dilation in isolation withoutalso considering the effects of time de-synchronisation.

Appendix
I - The Light Clock and Time Dilation
One postulate of SR asserts that the speed of light would be measured identically by all observersusing their own rulers and clocks, regardless of any relative uniform motion between observers. A “light clock”, as depicted in Fig – A1, consists of a vertical tube 1 unit in height with a source oflight at the bottom and mirrors at the top and bottom. A source of light (star) flashes once to “prime”the clock, and a packet of light travels up the tube to the mirror and is reflected back to the bottommirror, which reflects it back up again, and so on. Each such reflection is a “tick” of the clock, andthe time between each “tick” of the clock is the time needed for the light packet to travel the lengthof the tube. This is how the clock keeps time, by counting the number of ticks, each tick being 1unit of time. There are detectors along the tube (arrow) that show the location of the light packet inthe tube, for finer measurements of time between ticks. In this system of measurement, the speed oflight is 1 unit of length per 1 tick = 1 .
Fig – A1: Light Clocks in Relative Motion.
Fig – A1 shows two such light clocks. One is stationary with respect to agent A0 who is positionedat the origin of the x-y co-ordinates. The second light clock is travelling to the right at a uniformspeed, less than the speed of light, along the x axis. In the time that a flash of light, starting at theorigin and going in any direction, would cover 1 unit of length and reach the circle shown, themoving clock will cover a distance sin α along the x axis and reach agent A1 who is also stationaryon the x axis. Thus, the speed of the clock is represented by the angle α and is a fraction of lightspeed given by the value of sin α .

A single light source primes both clocks at the instant that they are both coincident with agent A0 .He observes the progress of the light packet travelling straight up his stationary clock by means ofthe detectors. When the moving clock reaches agent A1 , this agent records the position of the lightpacket along the tube by observing the detector arrow. Afterwards, both agents get together tocompare notes.
Agent A0 knows the speed of the moving clock in terms of the speed of light, and knows that theclock will reach agent A1 in the time that the detectors on his own stationary clock show the lightpacket right at the top (1 tick after the initial flash). He also knows that the light packet from thepriming flash that is travelling straight up the moving clock, will appear in his own rest frame totrace out the path from the origin to point b on the circle. This packet can only cover the same netdistance along this path as the packet moving straight up in his own stationary clock, that is, 1 unit,in the same time. This is a consequence of the SR postulate about the measurement of the speed oflight. From this information he can draw Fig – A1 and realise that the light packet in the movingclock must be at the intersection of the clock with the circle of radius 1, when his own stationaryclock reads 1 full tick. According to the diagram, this is at height cos α along the moving clocktube, which is confirmed by agent A1 from his direct observation of the detector arrow. But thisarrow actually shows the time elapsed according to the moving clock since the initial flash. Hence,the agents conclude that the moving clock is reading time slowed down by the factor cos α incomparison to their own stationary clock.
Now, if there was an agent, say B0 , moving along with the clock speeding to the right, and to theleft another agent, say B1 , keeping a constant distance sin α from B0 , then symmetrically, but withdirections of motion reversed, the B agents would observe A0 's clock speeding to the left. Theywould also measure a symmetric slowness in A0 's clock in comparison to their own clock by thesame observations, since, according to the B agents and the postulate of SR, the light packets alsotravel 1 unit of distance during 1 tick of their own clock. But the B agents would observe the lightpacket in their own clock to travel straight up and the light packet in the clock of agent A0 to angleoff to the left by angle α. Hence, A agents and B agents would symmetrically calculate eachother's clocks as slow by a factor of cos α in comparison to their own clocks.
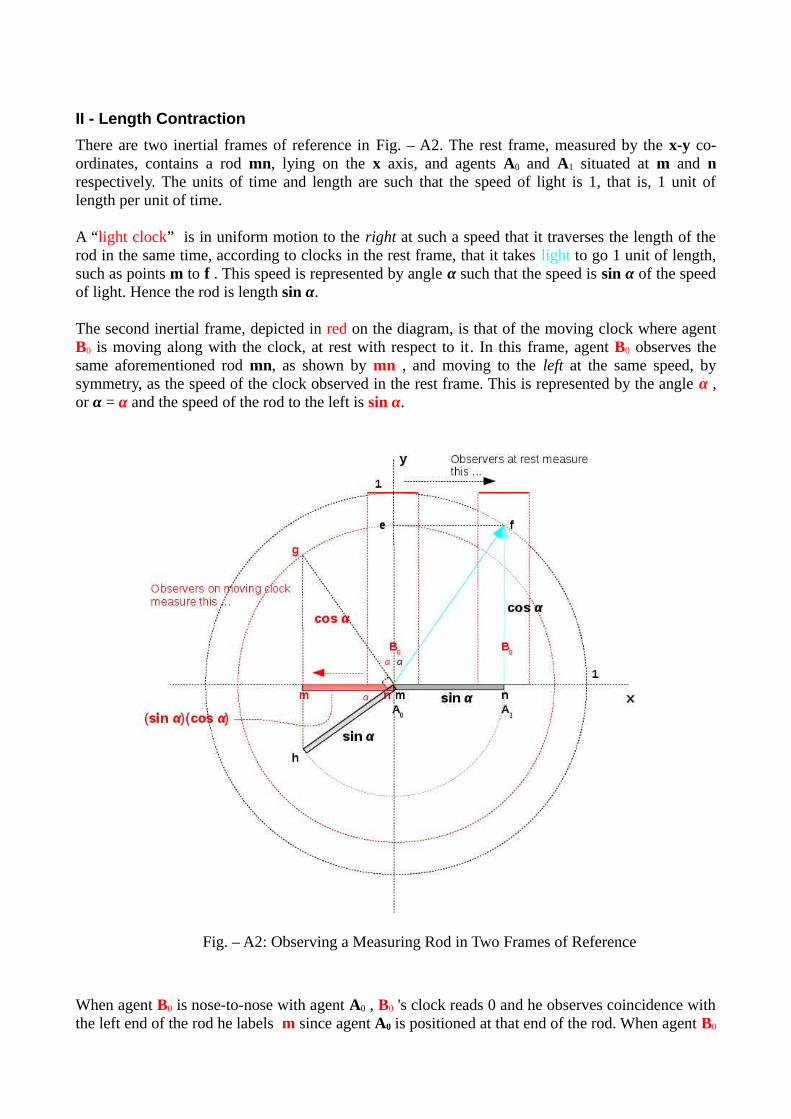
II - Length Contraction
There are two inertial frames of reference in Fig. – A2. The rest frame, measured by the x-y co-ordinates, contains a rod mn, lying on the x axis, and agents A0 and A1 situated at m and nrespectively. The units of time and length are such that the speed of light is 1, that is, 1 unit oflength per unit of time.
A “light clock” is in uniform motion to the right at such a speed that it traverses the length of therod in the same time, according to clocks in the rest frame, that it takes light to go 1 unit of length,such as points m to f . This speed is represented by angle α such that the speed is sin α of the speedof light. Hence the rod is length sin α.
The second inertial frame, depicted in red on the diagram, is that of the moving clock where agentB0 is moving along with the clock, at rest with respect to it. In this frame, agent B0 observes thesame aforementioned rod mn, as shown by mn , and moving to the left at the same speed, bysymmetry, as the speed of the clock observed in the rest frame. This is represented by the angle α ,or α = α and the speed of the rod to the left is sin α.
Fig. – A2: Observing a Measuring Rod in Two Frames of Reference
When agent B0 is nose-to-nose with agent A0 , B0 's clock reads 0 and he observes coincidence withthe left end of the rod he labels m since agent A0 is positioned at that end of the rod. When agent B0

is nose-to-nose with agent A1 , A1 reads the time on B0 's clock as cos α due to time dilation. B0
agrees with this since they are both looking at one and the same clock at this juncture! At the sameinstant, B0 observes coincidence with the right end of the rod he labels n , since agent A1 ispositioned at that end of the rod. Thus, B0 calculates that the entire length of the rod has passed himby at speed sin α in time cos α , thus giving the length of the rod as speed x time = (sin α)(cos α) =mn , given that α = α . Thus, as calculated by agent B0 , it appears that the moving rod has“contracted” by a factor cos α , along the direction of motion, in comparison to what is measuredby the A agents, who see the same rod as stationary.
Fig. – A2 summarises this result geometrically. The length contraction is identical to one calculatedby rotating the uncontracted rod mn to coincide with mh, perpendicular to ng. That is, thecontracted rod, as measured in the moving clock frame, may be viewed as the projection of theuncontracted rod onto the x axis , as determined by the angle α.

III - Simultaneity and Time De-synchronisation
Fig. – A3 depicts intersecting Epstein co-ordinate systems of two inertial frames of reference. As usual, the the units of time and space are such that the speed of light is 1. The single spatial axis of each co-ordinate system is labelled Si and the proper time axis is labelled τi . Physically, the spatial dimensions of the two frames of reference are really along the same direction.
Frame B is moving to the right with respect to frame A at a uniform speed represented by the angleα between the two co-ordinate systems, such that this speed, in terms of the speed of light, is sin α .When the spatial positions of agents A0 and B0 coincide along the single spatial dimension, a flashof light is emitted from this position of coincidence. Say that this event occurs at time 0 on agent B0
's clock and that agent A0 's clock is also set to 0 by agreement.
Fig. – A3: Simultaneity in the Rest Frame.
Taking frame B as the rest frame, where frame A is receding to the left along negative SB, the lightflash hits the positions of agents B1 and B-1 , who are at rest with respect to and equidistant fromagent B0 , at time t
0 as measured by their own clocks, which have been synchronised earlier. In
terms of the Epstein paradigm, the B agents have all “moved” through time by an equal amount as

represented by the red arrows. The blue arrows, representing the space covered by the light flash inthis frame in time t
0 , are the same length as the red arrows. This is consistent with the B agents
comparing notes and calculating the speed of light to be 1 by their own clocks and spatialseparation. Hence, B0B-1 = B0B1 = t
0 .
What the B agents can conclude is that their clocks remain synchronised over time and that lightfrom the flash at B0 's position reaches agents B1 and B-1 simultaneously at time t
0 as shown on their
own clocks.
Taking a view of the same events, but now as measured by observers at rest in frame A , we depictthe situation by Fig. – A4. We again see the configuration depicted before by Fig. – A3, but nowtilted clockwise by angle α. Again we see the same light flash emitted from the spatial position ofagents A0 and B0 as they coincide and the light packets proceeding along the SA axis in oppositedirections. These light packets will be observed by the A agents to also travel at speed 1 on accountof the postulate of SR. Due to length contraction and the synchronisation of the clocks of the Aagents, agent A-2 observes that he is nose-to-nose with agent B-1 and also agent A1 with agent B1 atthe same instant that agents A0 and B0 coincide, that is, at time 0 by both their clocks.
Fig. – A4: Clock De-synchronisation.
But as observed in the A frame, agent B-1 is speeding to the right and will be observed to interceptthe light packet going left and heading directly towards him at the position of agent A-1 . The lightpacket will travel the distance A0A-1 in the same time, by A's clocks, as agent B-1 travels the

distance A-2A-1 . Thus, A0A-1 = B-1K. Agent B1 , also speeding to the right, is heading away fromthe light packet going in the same direction, so the packet will take longer to catch agent B1 at theposition of agent A2 . Again, both the light packet proceeding to the right and agent B1 will havetravelled for the same length of time from the instant that A0 and B0 coincide. Thus, A0A2 = B1L. Itthen becomes clear, based on the geometric deductions outlined on the diagram, that the line KLintersects the τA axis at t
0 = t
0 .
On account of the difference in the travel times of the light flash, as observed by the A agents, it isclear that the flash of light heading left will strike agent B-1 earlier than the flash of light headingright will catch up to and strike agent B1 . Thus, as far as the A agents and their clocks areconcerned, the two event are not simultaneous, in contradiction to what is shown by the B clockswhen the light flashes strike both B-1 and B1 . Hence, simultaneity is frame dependent. Eventssimultaneous in frame B are not so in frame A and vice-versa. Agents in frame A see their ownclocks as synchronised but see the clocks of agents in frame B as de-synchronised, and vice-versa.
When agent A-1 is nose-to-nose with agent B-1 he will see the light strike B-1 and B-1 's clock read t0
as we deduced earlier in the B rest frame! This coincidence is represented by point K and thecorresponding value on the τA axis is t
0 = t
0 as should be expected. Thus, the proper time for agent
B-1 at this coincidence is read off the τA axis! But what does A-1's clock read when nose-to-nosewith agent B-1 ? We know that the clocks of the A agents are synchronised and remain so in frameA. Hence A-1 's clock will read the time required for light to travel from A0 at time 0 to A-1 , whichcorresponds to the length of the blue arrow from A0 to A-1 . This is the same length as the arrowfrom B-1 to K, as explained earlier, and geometrically corresponds to t1 on the τB axis. Thus, A-1 'sclock will show t1 as read off the τB axis. The same reasoning applies to the intersection of agentsB1 and A2 represented by point L. Thus, A2 's clock will read to t2 , again read off the τB axis.
We can now generalise the rule that on intersecting Epstein co-ordinate systems representing twoframes of reference in uniform motion with respect to each other, any point represents a spatialcoincidence of two agents Ai and Bj , one from each frame of reference, which we depict by thenotation Ai X Bj . The specific agents (and their spatial positions) are determined from the spaceaxis of the agent's own frame of reference in which the agent is at rest, and the time on that agent'sclock at the instant of coincidence is read off the proper time axis of the other frame of reference.Such is the confounding consequence of the Epstein paradigm!

IV – Relative Speeds
Fig. -A5 depicts the Epstein diagram for three frames of reference, A, B, and C, that are in uniform motion with respect to each other. Frame B is speeding to the right with respect to frame A such thatits speed is represented by the angle α and frame C is speeding even faster to the right with respect to frame A such that its speed is represented by the angle β. Agents A0, B0, and C0, coincide at the origin when all their clocks read 0. As usual, the units on the various axes are such that the speed of light is 1.
We want to determine what is the relative speed of frame C with respect to frame B by determiningthe angle γ between axes τB and τC . We can discount the simple solution that γ = β - α byconsidering the case where frame C represents a packet of light, in which case β = π /2 . But frameB should also measure the speed of that packet of light to be the same by the postulate of SR, thatis, γ must also be π /2 regardless of the size of α .
Fig. - A5: Relative Speed between Two Frames Heading in the Same Direction.

Let's look at the spatial coincidence of various agents in the various frames, which we depict by thenotation Mi X Nj for agents Mi and Nj .
Point L represents A2 X C0, when A2 's clock reads 1, as taken from the τC axis. Point K representsA2 X B1, also when A2 's clock reads 1, as taken from the τB axis. Thus, we know that agents A2, B1,and C0, all coincide spatially when A2 's clock reads 1. Now, B1's clock reads t0 at point K as readoff τA . This now gives us enough information to determine the location of point M representing B1
X C0, and thus the value of γ, since we know that B1's clock reads t0 at this coincidence read off theτC axis.
Since B0J = 1, then B0I = A0I = 1/cos α . Since C0L = 1, then C0A2 = A0A2 = sin β .Since tan α = sin α /cos α = HI/HK = HI/A0A2 = HI/ sin β , then HI = (sin α)(sin β) /cos α .Then t0 = A0I - HI = 1/cos α - (sin α)(sin β) /cos α = [1 - (sin α)(sin β)] /cos α
Since A0A1 = sin α, then A1A2 = A0A2 - A0A1 = sin β - sin α and JK = A1A2 /cos α = [sin β - sin α] /cos α = B0B1
But sin γ = B0B1 / C0M = B0B1 / t0 = [sin β - sin α] /[1 - (sin α)(sin β)] . And this gives us thespeed of frame C with respect to frame B in terms of the speed of light. In the case where frame Crepresents a packet of light and β = π /2, we have sin γ = [1 - sin α] /[1 - (sin α)] = 1 as expected.
We should note that Fig. - A5 depicts 3 pairs of superimposed co-ordinate systems, A-B, A-C, andB-C. Even though points K, L, and M represent the same physical spatial point of coincidence, theyare different points on the diagram since they are with respect to different pairs of co-ordinatesystems, A-B, A-C, and B-C respectively.
We now examine the case where frames B and C, are heading in opposite directions with respect toframe A, and hence towards or away from each other. This is depicted in Fig. -A6 below. Thereasoning is the same as above with some differences in sign.

Fig. - A6: Relative Speed between Two Separating Frames of Reference.
Since B0J = 1, then B0I = A0I = 1/cos α . Since C0L = 1, then C0A-2 = A0A-2 = sin β .Since tan α = sin α /cos α = HI/HK = HI/A0A-2 = HI/ sin β , then HI = (sin α)(sin β) /cos α .Then t0 = A0I + HI = 1/cos α + (sin α)(sin β) /cos α = [1 + (sin α)(sin β)] /cos α
Since A0A1 = sin α, then A1A-2 = A0A-2 + A0A1 = sin β + sin α and JK = A1A-2 /cos α = [sin β + sin α] /cos α = B0B1

But sin γ = B0B1 / C0M = B0B1 / t0 = [sin β + sin α] /[1 + (sin α)(sin β)] .
This is really the same formula as before except for differences in sign signifying the direction ofmotion. Again, where frame C represents a packet of light and β = π /2, we have sin γ = [1 + sinα] /[1 +(sin α)] = 1 regardless of the size of α . Thus, the speed of light is the speed limit with whichtwo frames approach or separate from each other even if each is travelling at light speed withrespect to a third frame of reference.
Notes
[1] Epstein, Lewis Carroll, Relativity Visualized, Insight Press, 1985.
[2] Taylor, Edwin F. and Wheeler, John Archibald, Spacetime Physics, W. H. Freeman and Company, 1966.
© 2013 by Gabe Czobel











![The Twin Paradox [several articles that discuss this … › Twin Paradox Explanations.pdfThe Twin Paradox [several articles that discuss this thought experiment about time] How does](https://static.fdocuments.net/doc/165x107/5f10b5be7e708231d44a7115/the-twin-paradox-several-articles-that-discuss-this-a-twin-paradox-explanationspdf.jpg)





