the least squares spectrum, its inverse transform and - T-Space
183
THE LEAST SQUARES SPECTRUM, ITS INVERSE TRANSFORM AND AUTQCORRELATION FUNCTION: THEORY AND SOm APPLICATIONS IN GEODESY Michael Ruthven Craymer A thesis subrniûed in conformity with the requirements for the degree of Doctor of Philosophy, Graduate Depattment of Civil Engineering, University of Toronto @ Copyright by Michad Ruthven Craymer 1998
Transcript of the least squares spectrum, its inverse transform and - T-Space

THE LEAST SQUARES SPECTRUM, ITS INVERSE TRANSFORM AND AUTQCORRELATION FUNCTION: THEORY AND S O m
APPLICATIONS IN GEODESY
Michael Ruthven Craymer
A thesis subrniûed in conformity with the requirements for the degree of Doctor of Philosophy, Graduate Depattment of Civil Engineering, University of Toronto
@ Copyright by Michad Ruthven Craymer 1998

National Library Bibliothèque nationale du Canada
Acquisitions and Acquisitions et Bibliogaphic Services services bibliographiques
395 W d i Street 395, nie Weuitn* OFEawaON K t A W ûttawaON K I A W Canada Canada
The author has granted a non- exclusive Licence allowing the National Library of Canada to reproduce, loaq distribute or sell copies of this thesis in microform, paper or electronic formats.
The author retains ownership of the copyright in this thesis. Neither the thesis nor substantial extracts fiom it may be printed or otherwise reproduced without the author's permission.
L'auteur a accordé une licence non exclusive pemettant à la Bibliothèque nationale du Canada de reproduire, prêter, districbuer ou vendre des copies de cette thèse sous la forme de microfiche/nlm, de reproduction sur papier ou sur format électronique.
L'auteur conserve la propriété du droit d'auteur qui protège cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement reproduits sans son autorisation,

THE LEAST SQUARES SPECïRUM, ITS INVERSE TRANSFORM AND
AUTOCORRELATION FUNCTION:
THEORY AND SOME APPLICATIONS IN GEODESY
Doctor of Phiiosophy 1998
Michael Ruthven Craymer
Deparmient of Civil Engineering, University of Toronto
To redize the fuil potential of increasingly more accurate measurements,
scientists are now faced with the ta& of modelling ever smaller effects on their
observations to improve their resuits. The problem, however, is that there is often little
understanding of the cause and effect relation between these so-caiied systematic effects
and the measurements. Spectra and autocorrelation functions can be used to help
diagnose and improve the modelling of these systematic effects in measurements.
However, standard techniques for computing spectra and autocorrelation functions
requixe the data to be evenly spaced, which is often not satisfied in practice.
The approach taken here is to develop a general technique for determining
autocorrelation functions for data which are unevenly spaced. This is an indirect method
whereby the systematic effects, represented by the residuals nom an incomplete a priori
deterministic model, are transformed into a power specrrum and then into an
autocorrelation function. To accommodate unevenly spaced data, a general least squares
transfomi and its inverse are developed. The inverse transfonn is used to obtain the
autocorrelation function from the least squares spemrn onginally developed by Vaniik
[1971]. This formulation can accommodate unequaily spaced data, random observation
emrs, arbitrary fî-equency selec tion, arbi trarily weigh ted and coxrelated observations, as

well as the presence of any a priori detemiinistic modeL The conventionai Fourier
transform and spectrum are shown to be just special cases of this more general least
squares formulation. It is also shown how the individual spectrai components in the least
squares spectmm and inverse transfomi can be estimated either independently of or
simuitaneously with each other.
The advanrages and limitations of the least squares transforms and spectra are
illustrated through tests with simuiated data. The technique of using autocorrelation
funceions to mode1 systematic effects is also iiiustrated with two r d applications; one
based on the precise measurement of the extension of a baseline spanning the San
Andreas fault in California, and another based on the measurernent of ellipsoidal heigha
using a GPS receiver under the infiuence of the effects of Selective Availability. These
tests show that the use of hlly populaied weight maaices generally results in an increase
in the value of the standard deviations of the estimated model parameters, thereby
providing more realistic estimates of the uncednties. On the other hand the effect of
comlations among the observations on the least squares estimates of model parameters
was found not to be very significant.

ACKNOWLEDGMENTS
Ta Maty , Sarah, Lisa and Scu~u(eI.
This work is dedicated to my f d y , Mary. Sarah, Lisa and Samuel. It simply
would not have been possible without their saaifice and unfailing support and
understanding for so many years. I owe them a huge debt of gratitude.
I am also deepIy indebted to my supenrisor, Rofessor Petr Vaniîek for a i i his
guidance, advice, generosity and persevering suppoh His tircless and meticdous efforts
in reviewing my manuscripts and patience in dealing with my stubbonuiess are! gratefully
appreciated. He is truiy the quintessentiai supervisor. I codd not have been more
fortunate to have him as my mentor.
1 also thank the members of rny Examination Committee, especiaiiy my Intemal
Appraiser, Rofessor Ferko Csiilag (Geography), and my Extemal Examiner, Rofessor
Douglas E. Smylie ( E h and Atmospheric Science, York University). Their constructive
comments and recornrnendations, together with those £hm the other members of my
Examination Comrnittee, are greatly appreciated
The GPS data used in my tests were kindy provided by William Rescott of the
U.S. Geologicai Survey in Menlo Park. 1 especiaily thank John Langbein, also of the
U.S. Geological Survey in Menlo Park, for supplying the EDM &ta and for generously
taking the t h e to discuss some of the results of my analyses.
1 express my sincere gratitude to my employer, the Geodetic S m e y Division of
Geomatics Canada, and in particular Nomian Beck and Lloyd Nabe for giving me time and
support to complete this work.

Portions of this research were also hinded by various Na@ Sciences and
Engineering Research Council of Canada Operating Grants held by Rof. Petr VanRSek
during the years 1986 to 1990.
Finally, 1 thank the Department of Civil Engineering for giving me the opportunity
to finish rny dissertation after so many years. 1 especiaüy thank Professor Robert Gunn for
his help in this regard

TABLE OF CONTENTS
.. Abstract ............................................................ ,. ,. ............................. A Acknowledgments ............................................................................... iv List of Tables ..................................................................................... k
List of Figures ..................................................................................... x
Chapter 1 . Introduction .................................................................. 1
Chap ter 2 . Basic Concepts of Stochastic Rocesses ................................. 6 2.1 Types of Processes ................................................................ -6
2.2 Determïnistic and Random Processes ........................................... -7 2.3 S tationarity and Ergodicity ........ ..... ....... ... ............................. 7
2.4 Statistical Moments ............................................................... 10
2.5 Covariance and Correlation Functions ......................................... 1 1
2.6 Decomposition of the Observable ............................................... 15
Chapter 3 . The Fourier Transform and Spectmm ............... .. ........... 17 ..................................................... 3.1 FourierSeIiesandIntegrals 17
3 . 2 Fourier Transform ................................................................ 21
3.3 Fourier Spectmm ................................................................. 25
3.4 Convolu tion and Correlation .................................................... 33
3.5 Fast Fourier Transfomi ......................................................... -36
3.6 OtherTransforms ................................................................. 38

............................................ . Chapter 4 The Least Squares Transform 40
........................................................................ 4.1 Introduction 40
............................................. 4.2 MatrixFormofFourierTransfonn 41
........................................................ 4.3 Least Squares Transform 46
........................................... 4.4 Weighted Least Squares Transform -49
................................................... 4.5 EfTm of Deteminhic Mode1 53
...................................................... 4.6 Vector Space Interpretation 57
4.7 Applications ...................................................................... -61
. Chapter 5 The Leas t Squares Spectrum .............................................. 63
........................................................................ 5.1 Introduction 63
5.2 Manix Fom of Fourier Spectrum .............................................. 64
............. 5.3 Least Squares S pectrum ... ...................................... 6 5
................... ..................... 5.4 Weighted Least Squares Spectrum .. 67
5.5 Effect of Deterministic Mode1 ................................................... 71
.................................................................... 5.6 StatisticalTests 74
5.7 Estimation Algorithms ............................................................ 79
.... Chapter 6 . Stochastic Modeiiing of Observation Errors ............... .. 81
6.1 Introduction ........................................................................ 81
..................... 6.2 Direct Autocovariance Function Estimation ............ .,, 82
....................... 6.3 Autocovariance Function Estimation via the Spectrum 83
............................. 6.4 Iteratively Reweighted Least Squares Estimation 84
. Chapter 7 Numerical Tests ............................................................... 86
........................................................................ 7.1 Introduction 86
7.2 Effect of Random Observation Errurs ......................................... -87

........................... Chapter 8 . Some Applications in Geodes y .... ... -125 8.1 Introduction ....... ... ...... -., .................................................... -125
8.2 EDM Deformation Measurements ............................................. -126
8.3 GPS Point Positioning .......................................................... 142
Chapter 9 . Conclusions and Recommendations .................................. 156
References ........................................................................................ 159

LIST OF TABLES
..................... Table8.1 Leastsquaresestunatesoflinear~dmd&tumoffs~ 129
Table 8.2 Least squares estimates of lineâr trend and datum offsets, including
additional d a m ofkt (#5a). ................................................... 134
Table 8.3 Least squares estimates of linear trend and dahm offsets, includùig
additional offset (ma) and usuig estimated N1 observation covariance
matrix based on cornputexi ACF.. ............................................... .140
Table 8.4 Su- of estimated linear trends with and without extra offset and
correlations .......................................................................... 141
Table 8.5 Unweighted and weighted hourly means and their standard deviations
................. (Std) of GPS height measurements over a 24 hou. period.. .148
..... Table 8.6 Twenty of the largest peaks in least squares spectrum in Figure 8.16. .152
Table 8.7 Weighted hourly means of GPS height measurements and their
standard deviations (Sui) over a 24 hour period using correlations
h m ACF based on 24 hours of data ............................................ 153

LIST OF FIGURES
Figure 2.1:
Figure 3.1:
Figure 4.1:
Figure 6.1 :
Figure 7.1
Figure 7 2
Figure 7 3
Figure 7.4
Figure 7 5
A single random process consisting of an ensemble of 4 sample
records (A, B , C, D) ............................................................. -8
Autocomlation functions (ACF) and power spectral density functions
............................................ (SDF) for some special functions.. -27
Commutative diagram for the direct and inverse least squares transfomi,
..... where F denotes the direct transform and F-1 the inverse transform -60
..................... Iteratively reweighted Ieast squares estimation process -85
Periodic tirne series of 100 e q d y spaced points and period 10
(fiequency 0.1 hz) with no observation emrs and with normaily
distributeci randorn errors (standard deviations 1/3 and 2/3) ................. 89
Least squares spectra of time series of 1 0 equdy spaced points and
p e n d 10 (hquency 0 .l) with no observation emrs and with normally
................ disûibuted random emors (standard deviations 1/3 and 2/3) .90
Direct estimation of unbiased autocor~e1ation functions of tirne series of
100 equaily spaced points and pend 10 (fhquency 0.1) with no
observation errors and with nomally dis~buted random errors (standard
deviations l/3 and 2M) .......................................................... .9 1
Comparison of direct and indirect (via LS spectrum) estimation of biased
autoconelation functions of time series of 100 e q d y spaced points and
........................ penod 10 (frequency 0.1) with no observation errors 92
Cornparison of direct and indirect (via LS spectrum) estimation of biased
autoforrelation functions of time series of 100 equaily spaced points and
p e n d 10 (fÎequency 0.1) with mdom obsemation errors (standand

.................................................................... deviation 1/3). -93
Figure 7.6 Cornparison of direct and indirect (via LS qxxtmm) estimation of biased
autocorrelation functions of the series of 100 equaiiy spaced points and
@od 10 (fhquency 0.1) with random observation amrs (standard
...........*....... ............................................... deviation 2/3). ,. -94
Figure 7.7 Periodic time senes of 100 equdy spaced points with period 10
(fkquency 0.1) and comlated random observation enors (standard
deviation 2/3). .................................................................... .97
Figure 7.8 Unweighted and weighted LS spectra (both independent and simuluu~ous
estimation) for periodic time &es of 100 e q d y spaced points with period
10 (fkquency O. 1) and comlated randorn observation mrs (standard
............*.........*..... ............................... deviation 2/3) ., ..... ... .98
Figure 7.9 Direct and unweighted indirect (via unweighted inverse ûansform of
unweighted LS spectrum) estimates of biased autocorrelation fimction
for periodic time saies of 100 equally spaced points with period 10
(frequency O. 1) and conelated random observation emrs (standard
.................................................................... deviation 2/3). -99
Figure 7.10 Weighted indirect estimates of biased autocorreIation function via
weighted inverse LS msform of both independent and simuitaneoudy
estimated LS spectra for peridc time senes of 100 equaily spaced points
with period 10 (frequency 0.1) and correlated random observation emrs
........................................................ (standard deviation 2/3) .100
Figure 7.1 1 Direct and unweighted indirect (via unweighted inverse transfm of
unweighted LS spectrum) estirnates of biased autocorrelation function
for tirne series of 100 equally spaced points with cme1ated random
obsewation m r s only (standard deviation 2/3). ........................... .lot
Fisue 7.12 Weighted indirect estimates of biased autmmlation function via

weightcd inverse LS transfomi of both independent and simultaneously
estMated LS specaa for time series of 100 equally spaced points widi
..... correlated mndom observation errors ody (standard deviation 2/3). -102
Figure 7.13 Periodic t h e series of different lengths of randornly spaced points
(unifody distibuted) with period 10 (muency 0.1) and no random
observation errors.. ............................................................. .IO5 Figure 7.14a LS spectra (independently estimated fr-equency mmponents) up to
different maximum 6requencies for periodic data series of unequally
spaced points with period 10 (kquency 0.1) and no random
observation errors ................................................................ 106
Figure 7. I4b LS spectra (independently estirnateci hquency components) for
different lengths of periodic data series of unequally spaced points
..... with period 10 (fkquency O. 1) and no random observation enors.. .IO7
Figure 7.15 Indirect estimates (via unweighted inverse LS nansform of unweighted
LS spectrum) of biased autocorrelation functions for different lengths of
periodic data series of unequally spaced points with period 10
...................... (frequency 0.1) and no randorn observation enors.. .IO8
Figure 7.16 Direct estirnates (via interval averaging) of biased autocorrelation
functions for different lengths of periodic data series of unequally
spaced points with period 10 (frequency 0.1) and no random
observation errors. ................ ., ............................................. 1 0
Figure 7.17 LS spectra for different sets of simultaneously estimateci fkquencies
for periodic data series of 100 unequally spaced points with period 10
......................... (frequency 0.1) and no random observation errors -113
Figure 7.1 8 Indirectiy estimated LS autocoirelation fûnctions via the LS spectrum
using different sets of simultaneously estimated wuencies f a
periodic data series of 100 unequally spaced points with period 10

Figure 7.19
Figure 7.20
Figure 7.21
Figure 7.22
Figure 7.23
Figure 7.24
Figure 7.25
Figure 8.1
Figure 8.2
(frequency O. 1) and no random observation emns.. ........................ 1 14
Periodic thne series of randomly spaced points with fiequencies 0.1
and 0.25 25 and no random observation ermrs (top), and independent
...................................... estimation of the LS specfiim (bottom). 115
Indirectly estimated ACF via the inverse LS transform of the
independent LS specmim using aU frequencies (top) and of the
sirnultaneous LS spectrum using only the two signifiant specaal
........................................... peaks at 0.1 and 0.25 hz (bottum). .116
Quadratic trend time series with periodic component (kquency
0.01 hz) and no random emm (top); LS spectrum of residuals h m
quadratic trend mode1 (miiddle); LS specuum accoun~g for effects
................................................... of quadratic mode1 (bottom) . I l 8
Evedy sampled 100 point random walk time s& (standard
deviation 1) (top) and its conesponding LS specmun ............ ...... 121
Direct (top) and indirect (bottom) autocorrelation functions for 100
............................................... point random walk data series.. .122
Unevenly sampled 100 point random walk tirne series (top) and its
corresponding LS spectrum ................................................... .123
Indirect estimate of autocorrelation via the independently estimated
LS spectrum for the unevenly sarnpled 100 point random w a k time
............................................................................. series -124
Location of the Pearblossom network in California used to
measure crusta1 deformation with a two-cofour EDM instrument
and location of the HolcombLepage baseline spanning the San
Andreas fault nuuiing through this network [after Langbein and
Johnson, 1997, Figure 11 ....................................................... 128
Changes in length of HolcombLepage baseline. Different

Figure 8.3
Figure 8.4
Figure 8.5
Figure 8.6
Figure 8.7
Figure 8.8
Figure 8.9
Figure 8.10
Figure 8.1 1
Figure 8.12
obsenration groups are denoted by different symbol colomhype
combinations ..................................................................... 128
Cornparison of residuai baseline length changes after rem0va.i of
estimated distance offsets for each o h a t i o n group and a cornmon
linear trend. DBerent observation groups are denotecl by different
symbol colour&p combinations. ............................................ -130
Histograms of lengths of point mplea (''Nyquist pniods'")
comsponding to possible Nyquia fkequencies. Botrom plot gives
................... a more detailed histogram at 1 &y.. ................... ... 13 1
Weighted least squares spectra (independently estimated) of
...... baseline length residuals fiam the deterministic model in Table 8.1 .132
Changes in length of Holcomb to Lepage baseline with additionai
................. datum offset in observation group fkom 1984 to mid- 1992 133
Cornparison of residual baseline length changes after ~emoval of
estimated datum offsets, including additional offset, for each
............ observation group and a comrnon hear trend for ail groups.. ,134
Weighted lest squares spcctra of baseline length residuals h m
................... the detemiinistic mode1 with additional distance offset.. -135
Semi-log (top) and log (bottom) plots of weighted Ieast squares
spectra of baseiine length residuals h m the detemiinistic mode1
with additional datum offset ................................................... .137
Indirect ACF, and enlargement at short lags. estimated h m
zero-padded time series of Holcomb-Lepage length changes with
additional d a t u . offset.. .......................................-............... .139
Variations in deived horizontal (top) and vertical (bottom) GPS
..... ........................... positions over 24 hours at station Chabot .. 144
Variations in recordecl horizontal (top) and vertical (bottom) GPS

................................. positions for the f k t hour at station Chabot. 145
Figure 8.13 hdependently eshmated least squares specaum of 8 s height
........................ measurcments for the first hour (data zempadded) -147
Figure 8-14 Indirect estimate of the biased autocorrelation function Ma the
inverse least squares transform of the least squares specaum for
the first hour.. ................................................................... ,147
Figure 8.15 Unweighted (top) and weighted (bottom) hourly means of GPS
height measiirements over a 24 hou pend.. ............................... -149
Figure 8.16 Least squares specaum (independently esémated) for entire 24
hour data set ..................................................................... -1 5 1
Figure 8.17 Autocorrelation function for en tire 24 hour dam set ........................ -1 52
Figure 8.18 Weighted (top) hourly means of GPS height measurements over
a 24 hour period using correlations obtained h m ACF based on
24 hours of data, and difference with equaüy weighted means without
........................ .................................. correlations (bottom) ,., 154

Chapter 1 Introduction
Recent advances in technology have produced exmmely precise and accurate
meesuring systems that are affected by even the srnallest effects that were once much too
s m d to be noticed. In the past these eEects were considerd to be mndom noise to be
average6 out To realize the fidl potential of their measurements, scientists are now faced
with the ta& of modelling these s d effects in order to improve their predictions. The
problem, however, is that there is ofien little understanding of the cause and effect relation
between these so-cailed systematic effects and the measured observables.
There are basicaily two approaches to d d b u i g or modelling the measured
observations. Detarnuiistic models are used to explicitly describe the behaviour of the
observations in temis of a mathematical mode1 of the physical process. These detemiinistic
models con& of constants and parameters to be estimami. Ofien, however, there is littie
understanding of the physical processes underiying the behaviour of the measurements. In
the other approach, stochastic models mat the measurements, or what remains afier
removing a detemiinistic part, as unpreciictable random (Le., stochastic) quantities.
Stochastic models describe the dependencies between the data and the incomplete
deterministic model in terms of mathematical correlations. These correlations c m be
represented by Nters, polynomiais, correlation functions and spectral density functions.
Because detaministic modehg is usually the preferred approach. correlations are ofien
used to help diagnose and improve the d e t d t i c modeL In cases where this is not
possible, the correlations, if carefully consmcted, can be used to help describe the residuai
systematic effects within the deterministic model.

The least squares estimation technique is primarily used f a fitting deterministic
models to the measurements. However, it is also able to accommodace stochastic modeis
diIough the use of a N l y populated covariance ma& for the observations. There are
different meuiods of deteminhg the variances and covariances that f m the observation
covariance ma&. The most direct method involves determinhg an autocovariance
function that describes the behaviour of various systematic effecrs. The problem with this,
and the main motivation for tbis work, is t h t traditional techniques for cornputing
autocorrelation functions require the data to be evenly spaced. This may not be the case,
especialiy when looking for correlations with some (physicaily meaningful) parameters
given as numerical functions. In practice such functions are often known only for values
of the argument that are unevenly spaced
The usual way of handling unevenly spaced data is to interpolate or approximate the
original series to get an evedy spaced one. Because this approach tends to mode1 the lower
frequency content in the data, the low fkquency behaviour of the measmemenits must be
known. Moreover, the high fkequency components can be lost by the srnoothing effcct of
the in teplation or approximation.
The approach taken here is to develop a more general technique for detemiining
autocorrelation functions for data which are unevenly spaced with respect to quantities
describing the systematic effects. As will be seen later, there are two basic approaches to
estimating autocorrelation functions. The most direct is to compute the autocorrelation
function directly h m the data. In this case, however, there is no satisfactory method of
handüng unevenly spaced points. There are methods based on averaging over larger,
evenly spaced intervals or bins, but using these results in a loss of resolution.
The aitemative approach is to estimate the autocorrelation function indiRctly by fmt
representing the systematic effects in tenns of a power spectrum and then transfomiing this
into an autocorrelation function. This is the approach taken here. Again the problem is that
most techniques for cornputing the power spectrum require evenly spaced &ta as do those

for trandomiirig the power spectrum to the autocorrelation function. The aim hcrc is to
find a more general technique that does not quire evenly spaced data To this en& a
general least squares aansform is developed.
Other methods are also available for determining the variances and covariances of
the observations. The most popular of these are the methods of analysis of variance and
variance-covariance component esDimatia The "analysis of variance" (ANOVA) mthod
(also called factor analysis in statistics) can be found in most standard texts on statistics.
Geodetic applications of the technique are desmibed in detaü by Keiiy [1991] and in a
series of articles by Wassef [1959; 1974; 19761. Essentially the aim of the method is to
divide the measuremena into separate groups (factors which connibute to the overall
variation in the data) and to estimate the variance components for each. The niff;culty in
applying the method is defining a scheme of dividing the observations into separate groups
which characterize some behaviour of the systematic effect king modeiled. m n , the
factors describing the systematic effect c m o t be so discretely defined, rather they are often
of a CO~MUOUS nature that precludes lumping them together into separate and distinct
groups.
Varianceîovariance component estimation, on the other hanci, is based on
modelling detamuiistically the residual variation in the measurements. The variances and
covariances are expressed in tems of linear models relating these components to various
factors describing the systematic effsct. The coefficients (variance and covariance
components) in the variance-covariance mode1 are estimateci together with the parameters in
a least squares solution. The technique is described in detail in Rao and Kleffe [1988] and
has ken applied :O many geodetic problems ( s e , e.g., Grafarend et al. [1980], Grafarend
[1984], Chen et al. [1990]). It can be shown that the analysis of variance method is just a
special case of this more generai approach [Chnanowski et al., 19941 The problem with
applying the mediod is ihat the estimation of the variance-covariance mode1 coefficients
usually needs to be iterated which can result in biased estimates of the variances and

covariances mao and Kleffe, 19881. This can lead to negative variances, which is
unaccep table.
The approach taken here is to model any residual systematic effects remaining after
removing a determinisec model, using autocorrelation functions derived from a power
spectcai density function of the residuals This idea was first proposai by VanîZek and
Craymer [1983a; 1983b] and furtherdeveloped by Craymer [1984]. To accommodate
uneveniy spaced data, the least squares spectrum. developed by VarilEek [1969a], was used
and converted to an autocorrelation fundon using the inverse Fourier transfonn.
However, the inverse Fourier transfomi is not completely compatible with the more general
lest squares specmim. Consequently, a more general leas squares transform and ia
inverse are developed here which are completely compatible with the lest squares specmim
and cm provide coma autocorrelation functions for data that are unevedy spaced
Although applied only to geodetic problems here, this technique should have wide
application in many areas of science where one needs to model or analyze measured data.
Before desaibing the technique, a review of the basic concepts of stochastic
processes and the conventional Fourier transform and spectrum are given. This is followed
by the development of a new "least squares" transform and its inverse, and the
reformulation of the least squares spectrum, originally developed by VaniZek [1969a;
19711, in tems of this new transform. It is then shown how an autocorrelation function
can be derived h m the least squares specmm using the inverse least squares transform,
and how this can be used in a procedure for stochasticaily modeiiing residual systematic
effects. These developmenu are followed by tests with simulateù data to examine
numerically sûme of the limitations of the technique. It is also applied to a couple of
examples in geodesy; the modelling of residual systematic effects in elecmnic distance
measurement (EDM) data and point positionhg data from the Global Positioning System
(GPS). FinaUy, conclusions and recommendations for M e r investigations are given.

Throughout the sequel the following notation is used:
variables/observables italic
vectors lower case, boldface letters
matrice dope rat^^^ upper c m bolciface l e m
functions upper or lower case le-, no boldface

Chapter 2 Basic Concepts of Stochastic Processes
2.1 Types of Processes
A process can be considered to be any kind of physical phewmenon that varies in
some way. We examine such processes by talang measurements of them; Le., by
describhg their physicai behaviour in tams of numencd quantities that cm then be
andysed mathematicdy. These processes are most commody represented as series of
measurements (obse~ations), often raken with respect to t h e (tirne series) or space (spatial
processes). When regardeci more generally as series with respect to any other argument,
these processes are referred to here as simply data series.
Rocesses Nt) are usudy thought of as one-dimensional; that is, varyhg with
respect to a one dimensional argument (t) such as time. However, a process may also be
multidimensional; Le., a function Nt) of a vector of arguments (t) - e-g., processes Nt)
which are functions of three-dimensiond position (x) in space or four-dimensional position
in space-the. One may ais0 encounter multiple processes Nt) of multiple arguments (t).
Rocesses can be classified as either CO~MUOUS or discrete. Examples of
CO~MUOUS processes are the cmstal motions of land masses due to tectonic deformations or
the motions of satellites in orbit about the Earth. On the other han& the accumulated errors
fiom point to point in a geodetic netwmk would be classined as a dimete pmess (in
space). Generaily, one is only able to obtain discrete samples of continuous processes,
primarily due to the na= of data acquisition systems.

2.2 Deterministic and Random Processes
Processes can also be classifiai as d e t e d s t i c and random. What is random?
"Everything and nothing" according to I k 11983, pp. 4054MJ. There is no one test for
detemiining whether a m e s s is either random or detaniinistic. The definitions most
often used are ody subjective or heuristic and a mana of philosophical debate. One person
may consida a process to be randorn noise to be fïitered out while another may consider
the same random process to be a deteministic signal to be modelled.
The most straightfbrward definition is that deterministic irnplies predictability while
random i m p k unpredîctability. Thus what is considered deterministic and what is
considered random depends on what one wishes to mode1 . The deteminïstic part is what
is king predicted or estimated exactiy while the random or stochastic part is that which one
can only predict or estimate with some degree of uncertainty. In the last century,
instruments had rather Liniited precision and much of the variability in a process was
considered to be random or stochastic, so that one could only predict with a great deal of
uncertainty. More recently, however, new measuring techniques have becorne more
precise so that it is now possible to attempt to mode1 ever smaller variations in the data in an
effort to improve the prediction power of the deterministic modei.
2.3 Stationarity and Egodicity
Different realizations of a random process will, in general, not be identical. A
single realization of a process is calleci a sample record. The collection or ensemble of al1
sample records is cdied a random or stochastic pmcess (see Figure 2.1). In a random
process, di sample records are different while in a deterministic pmcess ali samples are
identical.

Figure 2.1: A single random process consisting of an ensemble of 4 sample records (A,
B, C, D). There are 100 values of the argument ranging nom 1 to 100. Ensemble or
sample averages are taken over the four different sample records for each value (e.g., t or
t+@ of the argument; i.e., there are 100 sample averages. Argument averages are taken
over the arguments for each sample record; i.e., there are 4 argument averages.

Random or stochastic processes can be classified as king either stationary or non-
stationary. A pnness is stationary if the statistical propaàes of the process, defied over
the ensemble, are independent of the argument(s) (usuaily time or space). That is, the
statistical moments over alî realizations (e.g., ensemble or sample averages) are the same
for all values of the argument. A non-stationary process is one for which this property is
not sabsfied. Such processes require special techniques to mode1 dieir behaviour (see,
e.g., Bendat and Piersol [IW 11 and Priestley 1198 11).
In practice, different degrees of stationarity exist If the complete statistical
description of the process (Le., all possible statistical moments) is independent of the
argument, the process is said to be completely stationary. If only the f h t few moments are
independent of the argument, the process is considered to be weakly stationary. Rocesses
with a Gaussian probability distribution are completely describeci by only the fint two
moments. In this case, stationarity in only the first two moments infers complete
stationarity . Stationarity can be further classifieci on the basis of ergodicity. A process is
ergodic if the statistical properties taken over the argument (e.g., tirne averages) are
identical to the statistical properties taken over different realizations (e.g., ensemble or
sample averages). The assumption of ergodicity ailows for a considerable reduction in the
number of observations and computations required to determine the statistical pmperties of
a random process. For the sake of simplicity, convenience and, most importantly, costs,
most random processes are assumed to be ergodic in practice, even though there may be
evidence to the contrary.
When dealing with multidimensional (i.e., mdti-argument) spatial processes Nx)
whose arguments (x) define Location and orientation in space, stationarity is ofien
considered in remis of homogeneity and isotxupy. A process is homogeneous if it is
invariant with respect to its location in space and isotropie if it is invariant with respect to its
orientation [Grafarend, 19761.

Throughout this work a i l processes are assumed to be stationary and ergodic. Any
nonstationarity and nonergdcity is assumed to be explicitly modelled detaministically and
is assumcd to disappear when the mode1 is selected properly.
2.4 Statistical Moments
The properties of a random processes can be described by the statistical moments of
their probability density functions. For a single CO~MUOUS random process (or variable)
Nt), at a parti& argument t (hereafter d e d t h e for convenience), the kth-order moment
is given by
where Ep] is the mathemasical expectation operator and P(&t)) is the probabiüty ciensity
function of the randorn variable at time t. The integration is performed over all samp1e
records at time t. This implies that $(t)C E (--,-) n s t be integrable.
Generally, only the f h t two moments are useful in practice. The firt moment or
mean value is the simplest and most conmion measure of a random process. It provides a
measure of the cenaal tendency in the data series. For random processes with discrete
sample records &(t) , i= 1 ,.. .,n, the mean Mt) at argument t is defined by
where n is the total number of sample recoràs (infinie in the limit).

The second-order moment is a measme of the variation in the random process and
is defined by
The second-order central moment is a measure of the variation about the mean and is also
cded the variance @t)? The discrete fomi of the variance can be written as
2.5 Covariance and Correlation Functions
Covariance and correlation functions are generic tem for the more general second-
order moments which provide a measure of the linear dependence between observations at
different values of the argument t. Autocovariance and autocorrelation functions represent
the linear dependence within a single random process. Cross-covariance and cross-
correlation functions represent the linear dependence between a pair of different random
processes.
The autocovariance function C(t,t') is deked by

When the times are the same (i-e., t=t'), qn. (2.5) reduces to the variance ait)? The
cross-covariance function CO^ between two random processes Nt) and Ht) is defined
simihrly as
The autococorrelation function R(t,t') is defked as the normalized autocovariance
function; Le.,
SimilarIyl the cross-correlation function R d t , t 8 ) is the normalized autocorrelation
function:
The autocomlation function is limited to the range
for all t and t'. When the times t and t' are the same, the autocorrelation bction is equal to
one. The same holds for the crossi=orrelation function.

If the mdom pmcess is stationary, the moments are independent of the value of the
argument, 'Zhus, in the above definitions, the expressions are dependent oniy on the time
difference or lag. F-ZX The moments then Rduce to the foIlow fomis:
Simila- expressions to eqns. (2.1 2 ) and (2.12) can be wrinen for the crosscovariance and
cross-correlation functions.
The following wo propemes of these functions are consequences of the
assumption of stationari ty :
1 . The auto/cross-covariance and auto/cross-correlation functions are even functions
of 2; Le.,
2. At lag d the autocovariance hinction is positive and the autocorrelation function is
equal to one; Le..

Ergodicity is probably the most imponant and 0fte.n used assumption in practical
data analysis applications, even when the process is known to be non-ergodic or even non-
stationary. This is done to simpliSr the data acquisition and hanmg procedures.
Stochastic processes are ergodic if their sample moments (e.g., mean, autocovariance, etc.)
can be det&ed from averaging over the argument (e.g., tirne) instead of averaging over
the sample records (see Fi- 2.1). For the meaa and autacovariance function,
The discret- f m of these expressions (for discrete random processes) are given by:
. n-k
where lag q = k AI and Az is the sampling interval. This expression gives an unbiased
estimte of the autocovariance function. Although unbiasedness is desirable, this function
is not positive definite. Constructing covariance matrices h m this leads to singuiar
maaices. It also exhibits so-caiied "wild" behaviour at large lags. For these reasons, the
biased estimate is recommended by Bendat and Piersol[197 1, pp. 3 12-3141 and Priestley

[1981, pp. 323-3241. whae the denominator n-k in eqn. (2.20) is replaced by the constant
n. This resdts in a iùnction that tapers off as the Iag increases. An example of this is
given in the numerical simulations in Chapter 7.
Sirniiar expressions can also be written for the cross-covariance functions. Note
that the inregrations and summations are wormed over the argument t rather than over the
sample records; i.e., unda the assumption of ergodicity the moments c m be computed
fÎom a single sample.
2.6 Decomposition of the Observable
In the reai world, processes cannot be rnodeiled as purely deterministic or
stochastic. Instead, one is faced with a mixture of both. CIearly, there are many factors
which prevent us to mode1 in a detexministic way. Most are due to either masurement
errors or systems that are simply too complex to be modeiled entirely deterministicaiiy.
According to Priestley 11981, p. 141 6'almost aU quantitative phenomena occirrring in
science shodd be treated as random processes as opposed to detenninistic functions."
The expected value of a random process may be computed h m some deterministic
model describing the expected behaviour of the series. However, this model wil l pmbably
not describe the series exactly as mentioned above. A stochastic mode1 may then be used to
account for the resulting lack of f i t It is thmefore convenient to decompose the observable
Nt) into a detemiinistic or trend cornponent &t) and a random or stochastic component e(t);
i.e.,
~ t ) = &t) + e(t) , V t e (a,-).
The mndom component e(t) may also be decomposed into two components:

whae s(t) is a statistically dependent (correlated) component and q't) is a statistically
independent (uncorrelateci) component The observable may then be represented in the
form
The statisticaily dependent component is often due to effects neglected or incompletely
accounted for in the deterministic mode1 defineci by @ Both random cornponents art
assurned to have a zero mean. This is enforced when the trend component is estjmated by
lest squares. However, due to the statistical dependence, there is a correlation among the
s(t) components. This statistically dependent component can be thought of as the residual
determïnistic part remainùig after removing the postulateci detedstic d e l . Thus, this
component is ofren referred to as a systematic emn or systematic effect.

Chapter 3 The Fourier Transform and Spectrum
3.1 Fourier Series and Integrals
It is weU known in matkmatics that any continuous, periodic bction can be
represented by an infulte series of trigonometric functions, called a Fourier series. If Nt)
is a function of period T, it can then be expressed in the form
where ai and bi are the Fourier coefficients comesponding to frequencyf;:. The frequencyfi
can also be expressed in terms of the namal or fundamentai fbquency f, asfi=&, where
fo=lB: Note that if angular frequencies (cu) are to be used, q (in radians per unit of t )
should be substituted for 2Mi.
Using the fact that the cosine and sine functions form an orthogonal basis over the
intervai (-272, T/2), the Fourier coefficients for di i = 0, ...,- are given by [Priestley,
1981, p. 1941

If Nt) is an even funçtion, i.e., Nt) = #-t), the bi coefficients are zero. When Nt) is an
odd function. Le., Nt) = -#-t), the ai coefficients are zao. Note that writing the constant
t e m in eqn. (3.1) as rather than as og d e s the expressions (eqns. (3.2) and (3.3)) for
the coefficients valid even for i=O.
For non-periodic functions, there is no such Fourier series representation.
However, accmding to Priestley [ 1981, pp. 198-2001, a new perïodic function may be
defined which is the same as the non-periodic one over a finite interval, Say, (-T/2, TL?)
but repeats itself and is thus per idc outside this interval. This new fûnction will have a
p e n d T and can now be represented as a Fourier series. By letting T-, the dimete set
of frequencies in the Fourier series becornes a continuous set of fkequencies; Le., an
integral. The non-periodic funceion can then be represented by the scwalled Fourier
integral which has the fonn [Riestley, 1981, pp. 198-1991
where the Fourier coefficients over the continuous range of frequencies are defïned by
2 oy) = T ~ @ ( t ) c o s Z R f t d t , Q f ,
This representation of a non-periodic funchon in terms of a continuous set of frequencies
holds only when the function is absolutely integrable over the infinite interval (-O, -)
[Riestley, 198 1, p. 2001; i.e.,

This happens when Nt) decays to zero as t goes to infimty.
So far only periodic and non-periodic determimstic functions have been considered
However, in practice one usuaily deds with random or stochastic functions (processes)
where the appIication of the above representations is not so apparent. Ciearly, stochastic
functions may not necessarïiy be periodic and thus they cannot be represented by Fourier
series. Furthmore, stochastic functions are not absolutely integrable since, by the
definition of stationarity, they do not decay to zero at infinity. It would then appear that we
cannot represent them as Fourier integrals either. Nevertheles, accordhg to Priestley
1198 1, p. 2071 it is possible to circumvent this problern by sirnply mcating the stochastic
process at, Say, -Tl2 and TE as done for non-periodic functions. ûutside this interval the
function is defuied to be zero, thereby satisfying the abwlutely integrable condition. As
long as the stochastic function is con~uous, it can be represented by the Fourier integral as
in eqn. (3.4) but with coefficients defïned by finite Fourier integrals using integration limits
(Ti2,-TI2) instead of (--,-); i.e.[Priestley, 198 1, p. 2071,
Unfominately, we cannot take the lirnit T+ as before since, by the pmperty of
stationarity, the above integrals would not be finite.

Although aU of the expressions for the Fourier series and integrais were given in
texms of trigonometric huictions, it is more cornmon to use complex notation for a more
compact representation of the series and integials. Assigning the cosine t a n to the real
component and the sine temi to the imaginary component, each trigonometric term can be
replaced by a complex exponential funetion using Euler's i o d a wronshteki and
Semendyayev, 1985, p. 4741
where j=d-1 is the irnaginary unit.
Using this notation, the Fourier series in eqn. (3.1) can be re-written as mestley ,
1981, p. 1991
where
Substituthg for ak and bk, using eqns. (3.2). (3.3) and (3.10).
T/2 1 a

Putting rhis in the Fourier series in the continuous form of eqn. (3.1 1) and letting T+
gives the s0i:aiied Fourier integrai over a continuous range of observations; Le.,
( [@(r) e - ~ z d dr for non-penodic functions
@(t) e--2?ft dt for stochastic functions -d 3.2 Fourier Transform
Given the Fourier integral representation of a non-periodic or stochastic funetion,
the transformation fbm Nt) to F(fJ in eqn. (3.15) is called the (direct) Fourier aansfom,
or the finite Fourier transfomi if deahg with stochastic functions. The transformation
fkom FV) to Nt) in eqn. (3.14) is cailed the inverse Fotuier transfom. Nt) and F m are
referred to as a Fourier &orm pair, denoted by Nt) o Fm. Note that the complex
conjugate fom is used in the direct aansfom and not in the inverse transform. In some
texts (e.g., Press et al. [198q), the conjugate form is used in the inverse ûmsform and not
in the direct transfom.
In practice one rarely deals with CO~MUOUS stochastic processes of infinite length
but d e r with actual discrete processes or discretely sampled data h m continuous
processes of finite length. Although such discrete samples are o h evenly spaceà in time
(or any other arpen t ) , this may not always be die case. Nevertheles, the application of

traditional Fourier nansfarm techniques requires the procases to be discretely and evenly
samp1ed This is because the trigonomeaic functions are not orthogonal over an unevedy
spaced domain.
For a discretely and evenly sarnpled stochastic process or data senes {Ntd,
i=0,1, ..., e l } , the discrete Fourier transform is obtained by approxima~g the Folmer
integral in eqn. (3.15) with a summation; Le.,
where n is the number of 'observations" (samples), & is the sarnphg interval and fk is one
of the frequencies belonging to the set of fkequencies estimable h m the discrete pmcess
(see below). Note a h that the summation index extends fîom O to n-1 (instead of 1 to n)
following the usual convention. If T = d t is the length of the data series, the discrete set of
frequencies are given by
where fo=l/T=l/(ndt) is the fundamental frequency. To make maners simpler, n is
assumed to be even (the data mies is truncated to an even number of points). This set of
integer multiples of the fundamental fiequency will be simply caiied cTourier" fraluencies
here because they are always used in the Fourier transfm and Fourier specmm.
By convention, it is only the b a l summation in eqn. (3.16) (widiout the At in
fiont) that is commoniy refmed to as the discrete Fourier transfomi, denoted by Fk for
frequency fk. The discrete Fourier transfomi OFï) is then defined by

The inverse discrete Fourier transfomi is obtained simiiarly by appruxima~g the integrai in
eqn. (3.14) with a summarion and substini~g for the d isæte Fourier naosform. This
gives
The discrete sampling of a stochastic process has an important consequence hown
as the aliasing effect, whereby some high frequency information will be lost or, more
precisely, hidden (aliased) in the lower fkquencies. This can be seen by examining the
exponen tial term in eqns. (3.17) and (3.1 8) as a func tion of the discretely sampleâ process
#(rd, i = -,...,O, where ti = i At and At is the sampling interval. Re-wrïting the
exponential function as
the effect of discrete sampling on each sine and cosine texm can be seen. For example,
substituting iAt for ti in the cosine term gives
The same cm be written for a new kquency f+M,
COS 21@f+Af)ti = cos(2IRfdf + Zia'&&) .

These two msine tums are quivalent only if2îrigfdt is an integer rndtiple of z This
, d e d the Nyquist or critical fkquency. occurs when At is an inîeger multiple offnr = 2dt
have fkquencyf. The same holds for the sine tanis. All frequencies outside of the
Nyquist frequency range ( - f ~ f ~ ) wiU "11 beased to (i-e., moved to and superimposed on)
kpencies in this range. If possible, At should be chosen srnaLi enough to avoid aliasing.
However, this requires a knowledge of the upper frequency limit of the information
contained in the process being sampled or, at lest, knowledge that only negligible
information exists beyond the Nyquist frequency and our willingness to neglect this
information.
There are some speciai properties of Fourier transf' that are of partïcular
importance. niese are summarized as follows (* indicates the complex conjugate
operator):
Nt) is red
Nt) is Maginary
Nt) is even
Nt) is odd
F(-- = FM* ,
F(-j) = -Fm* ,
F(-- = Fu) (i-e., F m is even) ,
F(-fj = -Fm (Le., Flf) is odd) .
Note that when de al functions, the senes of trigonometric t e m of cosines and
suies d u c e to a series of only cosine terms; Le., by eqn. (3.19) the sine terms are all zero.
In this case the Fourier sansform reduces to the so-called cosine transform
The foIIowing are some other properties of the Fourier transfm (fkom Press et al.
11992, p. 4911). Recall that #j(t)oFm indicates that Nt) and F(B are a Fourier transfomi
pair.

3.3 Fourier Spectrum
The representation of functions in temis of Fourier senes has a special physical
interpretation in terms of power (cf. Priestley [1981, p. 194-1951 and Ress et ai. [1992, p.
4921). Consider an absolutely integrable non-penodic function f(t). The total "power" of
Nt) is customarily defined by
00
Total power = #(t )2 dt . a
Substituang the inverse Fourier transfom in eqn. (3.14) for one of the M t ) gives
Interchanging the order of the integrals and substituting for the direct Fourier transforms

where F*V) denotes the complex conjugate of Fm. The total power can therefore be
e x p d eitha in temis of the integral of the original function or its Fourier transfomi;
1-e.,
w QO
Total power = 1 ( ~ ( r ) 2 dt = 1 i ~ ( f 112 df . a -0
This is known as Parseval's relation [Jenkins and Watts, 1969, p. 25; Priestley, 1981, p.
2011 or Parseval's theorem b s s et al., 1992, p. 4921. Note that the total power is qua1
to n tirnes the variance S.
It can be seen h m q. (3.34) that the total power is divided among a continuous
set of muencies in the representative Fourier inte@ Each term F(BI*@ represents the
contribution to the total power in Nt) produced by the components with frequencies in the
intend (f. f+a. The so-cailed power specnal density sO) for frequency f is thus defined
by
The plot of s(f) versus fiequency f is also called the power specmun, or simply the
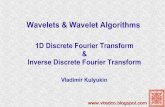
spectrum. Theoretical power spectral density functions for some specid functions are
illusnated in Figure 3.1.

Constant - ACF Constant - SDF I l
Sine Wave - ACF
Exponenhd - Aff Exponential - SDF
-1 -0.5 O 0.5 1 O 0.5
1 Sine Waye - SDF
Figure 3.1: Autocorrelation functions (ACF) and power spectral density functions (SDF)
for some special functions.
0.5
(I*
- -

For periodic fimctions, the total power over the entire interval (-o., -) is infinite
mestley, 1981, pp. 195,205j. Aithough it is only needed to describe the power over the
fînite interval (-T/2, T12) in d e r to characteriz it for the entire infinite intemal, it is
usuaüy mon convenient to use the totai powa per unit of the over the finite interval. This
is obrained by dividing the total power by the period T; Le.,
Total power per unit of tirne -2 , 2 - r T I - ~ o t a i power (4,
The total power over (-T/2,T/2) is divided among the infinite set of discrete frequencies in
the representative Fourier series. The contribution s(fk) to the total power per unit of time k
of each T0wiei7 fkquency f k = ~ is calIed the spectral value for frequency fk and is
Similarl y, for stationary stochastic functions (random processes), the total power is
aiso infinite by the definition of stationarity (i.e., a steady state process h m t = -.. to =
requires infinite energy or power). Using again the truncation approach, stochastic
processes can a h be represented by finite Fourier integrals in the nnite interval(-272, TIZ).
The total power in this finite interval WU then be finite.

For bot. non-periodic and stochastic fuactions over a finite intaval (-Ta, T/2), it
is g e n d y more convenient to aiso use the pown per unit of time. As for penodic
functiom, the power pes unit time is obtained by dividing the total powa over the f i t e
interval by the length of the interval; Le.,
Total power (-5- , ) T T ~otaipowerpaunitoftime[-2 , 2 ) = T
Here s(B represents the power spectral density function. For a process of finite length T it
is defined by
The s p e c m denned above is a function of both positive and negative frequencies
and is cailed a "two-sided" s p e c d density function. However, one does not usually
distinguish between positive and negative frequencies. Moreover, when Nt) is Ral, the
Fourier transform is an even function; i.e., Ffl=F(-B. It is therefore customary to express
the specmim as a fiinction of only positive fkquencies. Such a spectnim is called a "one-
sided" spectral density function. Because the total power in the pmess must remain the
same, the spectrai values for the one-sided spectxum are defined as

For real Nt), FV) = F(-jj and
Hereafter, the one-side spectral density fhction wil l be used since only real Nt) will be
considerd
It is also convenient to nomialize the spectral values so that they express the
percentage of the total power or variation in the process contributed by each fhquency.
The normaiized spectral values 5*m are given by
A couple of important properties foi power specaa are obtained h m the properties
of Fourier transfomis. One of the most important is the invariance of the specaum to time
shifang. Given a pmcess Nt) shified by t,, the new Fourier aansform is
The spectrum s'(B for this process is then given by

which is identical to the specmim of the original series- Note that the constant exponential
term in eqn. (3.43) cancek with its complex conjugate.
The specrmm is not invariant with respect to time scaling, however. Intuitively,
expanding tirne effdvely resuits in s w g frequencies, and vice versa The relation
between two spectra with different time seales cm be obtained from eqn. (3.28). a v e n a
function Nat) which is scaled in time by a faftor a, the new Fourier aansform F'f) is, by
eqn. (3.28)-
This resuits in both a d n g of the frequencies as weU as the Fourier transfomi and
spectnim.
For discretely sampled, infinite length processes, the Fourier transform and spectrai k values are defined ody for the discrete set of ''Fourier" fkequencies fk = a k =
-n/2,...,n/2 (see discussion of discrete Fourier transform). The discrete fonn of Parseval's
relation for the total power in a process is obtained in the same way as for the Fourier
integrai except that the discrete Fourier transform is used instead. Foilowing the same
substitution and reordering of summations in eqn. (3.33) gives [Press et al., 1986, p. 3901

The individual spectral values s(fC) for the power spectral density hction are then given
by
The normaiized spectrai values are obrained by dividing by the total power as in eqn.
(3.42). For the diçcrete case. this gives
ln-l RealiEng that the variance d is the total power divided by n ($ = n ç ~ t i ) 2 ) , the
a n o d z e d specaal values can also be written as
Sample estimates of the spectrum c m be obtained by e v a l u a ~ g the discrete Fourier 1
transfomi for frequencies fk = O, ...,= and cornputhg the spectral values sud using
eqns. (3.48) or (3.49). It is important to note for later that this is equivalent to (i)
e v d u a ~ g the Folnirr coefficients ak and bk for the dimete hquencies fk using l e s t
squares estimation and (ü) computuig the (amplitude) specmun h m (ak* + bk2). For real-
valued functions, only positive frequencies need be considered because the negative

fiequency part of the specmim is the minor image of the positive part. Howeva, the
negative m e n c i e s will be aiiased as positive ones an& combined with the (identical)
positive ones. will result in spectral values twice those computed using eqn. (3.48), except
for the zero frequency. This gives the one-side specmim ratha than a two-sided spectrum.
The spectnnn computed in this marner is g e n d y referred a as the periodogram
[Priestley. 1981, p. 394; Ress et ai, 1986, p. 4211 and foms the basis of the least squares
spec-
3.4 Convolution and Correlation
Another application of Fourier transforms is in the concept of convolution and
correlation. Given two functions Nt) and Xt) and the5 Fourier aansforms F m and G(B,
we can combine these two functions together in what is calleci a convolution. For the
continuous case the convolution of Nt) and Nt), denoted @(t)*xt), is defineci by
[Bronshtein and Semendyayev, 1985, p. 5821
where ris thought of as an argument (time) difference or lag. The wnvolution theorem
then States that the Fourier transform of the convolution of two hinctions is equal to the
product of the Fourier transforms of the individual functions [ibid, p. 5821; Le.,

where the syrnbol o again signifies that the functions on either side are Foinier transform
pairs. The Fourier transfomi is used to go h m left to right while the inverse nansform is
used h m right to left
For discretely and evenly sarnpled processes Nt) and gti) , i = -n/2,.. .,n/2, the
discrete convolution is defied by
where the lags t i t i 4 are eveniy spaccd. The discrete version of the convolution theorem is
then
for fiequencies fk, k = O,...,n- 1.
Closely related to the convolution theorem in eqn. (3.51) is the correlation theorem
It cm be s h o w that the product of a Fourier transform with the complex wnjugate of
another Fourier tmnsfom can be reduced to the form [Priestley, 198 1, p. 2 1 11
where K is caîled the kemel:

In the conten of spectral analysis, the kernel K(r) represents the cross-covariance fiinction.
Multiplying the Foiiner transfonn by in own cornplex conjugate gives the autocovariance
funCaon C(r) (cf. Section 2.5) as the kernel; Le.,
Realizing that this multiplication gives the spectral value for fresuencyf, the covariance and
the spcctmm hinction can be expressed as a Fouriex transform pair; i.e.,
This is known as the Wiener-Khinchin theorem. Furthermore, the nmalized s p e c m
r(B is the aansfm pair of the autocorrelation funcbon R(t) (cf. Section 2.5) so that
When computing the convolution of two iùnctions care must be exercised to avoid
socaiied "end effects" or "wrap around effects" caused by assuming the fimctions to be
periodic. For example, when convolving a function wi th itself (Le., autocorrelation), data
h m the end of the series are effectively wrapped around to the beginning of the series
thereby fomiing a penodic function with period T. This can have adverse e k t s but can
be prevented by simply "padding" the data series with enough zeros to avoid any overlap of
original data. To estimate ail possible frequenties up to the Nyquist hquency (defïned in
Section 3.2), a data series of n points must be padded with n zeros to completely avoid any
wrap around affect. There is a nade off when dohg this, however; the more zeros

appended to the series, the pa te r the aors in the sample eshates of the Fourier
aansforms. See Press et al. [1992, pp. 5331 for more information on end effects.
These indirect expressions in temis of the spectnun are often used as the basis for
the efficient computation of autocovariance and autocomiation fundons using the FFI: It
will also be used as the basis for developing autocovariance fiinctions for unevenly spaced
data to provide objective a priori estimates of covariances and weights that account for
residual systematic effects in lem squares modelling. However, it must be adkd that
this indirea procedure gives the biased estimate of the autocovariance and autocorrelation
functions [Bendat and PiersoI, 197 1, pp. 3 12-3 14; Priestley, 198 1, pp. 323-3241.
3.5 Fast Fourier Transform
Any discussion of the Fourier transform would not be complete without mentionhg
the secalled Fast Fourier Transform (FFT). Although the term is often used
synonymously with the Fourier transfomi itself, it is reaiiy only a numerical algorithm used
to compute the discrete Fourier transfixm (Dm in an exmely efficient manner. The
algorithm, popdarized by Cooley and Tukey [1965], revolutionized the way in which the
DFT had been used. Up to that tirne the DFT was restricted to only srnall data sets. W i h
the advent of the FFT aigorithm. however, it was quickly employed in a multitude of
applications.
nie basic idea behind the FFT is a bisection and recombination process. F i t the
data is repeatedly bisected into pairs of points by recursively dividing the data into odd and
even numbered points. The Fourier transfoms are then computed for each of these pairs
of points and subsequently recombined to foxm the Fourier transform of the entire data
series. Because the Fourier transform of a pair of data points is a trivial and very fast
computation (no multiplications are needed), the algorithm results in a dramatic increase in
computational efficiency, especially for large data sets. The number of (cornplex)

multiplications involvd in the direct evaluation of the disate Foinier trandorm is of the
order of 9 whereas the number of such operations in the FFT aigorithm (in the
recombination of the individual transforms) is only of the Ofder of n log2n [Press et ai.,
19921. This general strategy was fîrst used by Gauss to d u c e the computationai effort in
determinhg planetary orbits and also derived by as many as a dozen others since (see
Brigham [1974] and Bracewell[1989] for more information).
The main limitation of b t h the discrete Fourier transform and its FlT algorithm is
that the data must be equaiiy spaced. The expression for the Fourier coefficients, and thus
the Fourier transfomi, are vaiid only for equdy spaced data. Moreover, the FFT algorithm
uses certain properties of the sine and cosine functions for eveniy spaced data to reduce the
number of temis that ne& to be evaluated For the investigation of systematic effects
which can be functions of many different kinds of arguments that are usually very
irreguiarly spaced, this precludes the use of the FFT, at least in the computation of the
discrete Fourier transfm A similar problem also arises when there are large gaps in an
othenvise equaily spaced data series.
To circumvent the problem of unevenly spaced or "gappy" data, interpolation
schemes are someeimes used where the original data are interpolami to give an evenly
spaced series. This then ailows one to use naditional techniques such as the FFï.
However, the accuracy of the interpolating function to represent the original data series
depends on the form of the interpoia~g function, the smoothness of the original data Senes
and the presence of large gaps in the data. This presents a dilemma since in order to
properly interpolate the &ta we must have a good howledge of their behaviour, but the
lack of this knowledge is usually the reason for computing FFTs in the £kt place. Another
problem with interpolation is that in the presence of large gaps, they often result in
disastrous results.
A second limitation of the FFï' is that the number of data points to be transformed
must be a power of 2 for the FFT to be most efficient Altemate and mixeci mdu<

formulations of the FFî aiso exin but they are much less efficient. The conventional
method of deaüng with a number of points that are not a power of two is to again ''pi" the
data series with enough oeros to obtain the required number of points for the FFT. This
clearly infiates the number of points to process thereby increasing not only processing time
but also storage requirernena. It is most inefficient when dealing with large data sets. In
these cases. one usudy only takes the fnst power of two number of points and omits the
rest More importantly, zero paddllig also increases the ermr in the FFI' with respect to the
continuous Fourier transform,
One more limitation of the FFT is that it is restricted to only the set of 'Fouriei'
fre-quencies. If fkquencies other than these standard ones are present, a phenornenon
lmown as spectrai leakage can degrade the resuits . To compensate for this, so-called
window functions are employai to reduce this leakage by convolving a tapered Gaussian-
like function with the data senes in the Fourier transform. For more on window functions
see, e.g., Riestiey [l98 1. Chapter 71 and Press et al. [1992, Chapter 13-41,
3.6 Other Transforms
The preceding developrnents have been based on the use of Fourier (trigonomeaic)
series to approximate functions and stochastic processes. The advantage of using Fourier
series is that the periodic ternis are usually easier to interpret physicaliy. Nevertheless,
other approximation or basis functions can be used.
One popuiar alternative approximation hinction is the socaiied "cas" hinction
which forms the basis of the Hartley transfm m e y , 1942; BraceweU, 19861. This
function is defined as

and is used in place of d2@t = cos2@ - j sin2m in the usual Foimer expressions. Note
that the difference between the two is that the Fourier expressions separate the cosine and
sine ternis while the Hartiey expressions combine them.
In spie of the different functions used in the Fourier and Hartiey transforms, they
are simila, in shape. In fact, the Fourier transform can be deduced b m the Haniey
tramform. aithough this is wnsidered unnecessary because either transfona provides a pair
of numbers at each fiquency that represents the oscillation of the series in amplitude and
phase @3raceweU, 19891. Moreover, the amplitude and phase spcctra obtained from either
nansfonn are identical, although they are derived in a slighdy different manna [ibid.,
19891.
As for the Fourier aansforrn, Braceweil[1986] has also developed a fast Hartley
transfomi in much the same way as the FFT. The advantage is that the fast Hadey
transform has k e n shown to be nvice as fast as the FFï and uses haIf as rnuch cornputer
memory [O'Neill, 19891.

Chapter 4 The Least Squares Transform
4.1 Introduction
A significant limitation of the traditional techniques for the estimation of
autocorrelation fwictions, either directly or indirectly via the inverse of the Fourier
spectrum, is that they always require the data to be equdy spaced in the argument.
Although the data might be evenly spaced with respect to some basic sampling parameter
such as time, it will generally not be evenly spaced with respect to other parametas that
may better characterize the behaviour of any systematic effeca tu be modelled by
correlation functions. Som typical parameters that might be used to mode1 such systematic
effects in geodetic problems include spatial distance, satciiite elevation angle, atmospheric
temperature, temperature gradient, pressure, etc.; cf. Vanilk and Craymer [1983a,b],
Craymer [1984; 19851, VmZek et al. [1985], and Craymer and Vaniiek [1986] Clearly it
would be very diffcult to obtain a data senes evenly spaced in even some of these
randody fluctuating parameters.
Other reasons for seeking altemative techniques are conmed with the limitations
of the discrete Fourier transfomi and FFI' describeci in the preceding chapter. These
include the use of ody the set of standard 'Fourier" muencies (infeger multiples of the
fundamental fkequency), and the requirement of 2n data points for the FFI' algorithm. Ui
addition, a detenninistic mode1 is often es- and rernoved h m the data prior to any
spectral analysis. Traditional spectral techniques do not consider any interaction or linear
dependence (correlation) between the a priori determinisec mode1 and the implied periodic

components modelled in the spectrum and in the comlation hinction. M m v e r , the data
cannot be weighted in the Foinier d o m computation in accordance with their assumed
probabiiity density fiuiction. Thus, some observations with relatively large random errurs
will be treated the same as other observations that may be many times more precise.
The aim here is to fornidate a more general aansform that is capable of handling
such unevenly spaced arguments. The transform is based on the least squares specaum
computation developed by VaniRIek [1%9a; 197 11 and is r e f d to here as the least
squares rransform and its inverse. Note that this l e m squares approach is developed here
for real-valueci data and, consequently, positive frequencies. It cannot cope with complex
data or negative frequencies, which are useful in distinguishing between prograde and
retrograde motions.
4.2 Matrix Form of Fourier Transform
The basic fom of the least squares transfomi can be derived by fifit expressing the
dismete Fourier transform (Dm in terms of matrices of complex exponentiai fumions.
Rewriting eqn. (3.18) in manix fomi gives (the superscript "c" denotes a complex matrix)
w here

Note that the transpose in eqn. (4.1) is the complex conjugate transpose for cornplex
matrices (see Golub and Van Loan [1983, p. 9 1); i.e.,
This matrix fonn of the discrete Fornier transform can be written for each of the discrete
''Fourier" frequencies in eqn. (3.17).
Combining ail fhquencies together gives the simdtaneous transform for a i l the
standard Fourier frequencies; i.e.,
w here
The transpose in eqn. (4.5) again indicates the complex conjugate transpose where

Note that AVk in eqn. (4.1) is the k-th columa of AC coftesponding to the specinc
frequenc~ fk-
The inverse discrete Fourier transform expresses each observation Nti) in tnms of
the Fourier traasforms Fk for ali of the discrete T0uriei7 frequencies fc = k/(ndt),
H l , ..., el. This a n also be written in ma& form as for the direct transfomi. Rewriting
eqn. (3.19) in rnatrïx notation gives
where
Combining a l i observations together gives the sirnultanmus inverse uansfonn; i.e.,
where AC is defined as in eqn. (4.7) and @ is denned by eqn. (4.3). Note that the design
matrix is not transposed in the inverse transfom and a factor of Iln is included as in the
cornplex form. Expanding this in ternis of the Fourier msfonns for the individual
Totrrier" fiquencies gives

Befare developing a more generaï least squares fom of the a b e transfm, it is
necessary to replace these complex expressions with their reaI-value- nigonomenic forms.
It will be show later that this i s because, for unequally spaced data, the real and imaginary
components can, in general, no longer be treated independently of each other. Using
Edex's formula (eqn. (3. IO)), the discrete Fourier transfonn in eqn. (3.18) becomes
and the inverse discrete Fourier transform is
Note that the sine term is zero for the zem frequency component ( H l ) in the above
expressions. Realizing that the red (cosine) and irnaginary (sine) temis are two separate
quantities that are independent of each other, the complex expression can be rewritten as
two separate real expressions for each tem. That is, for the reai term,
and for the irnaginary tam,

The discrete Foinier msform in eqn, (4.1) can now be expressed in real matrix
notation using eqn. (4.1). with separate columns in the design matrix A for the r d
(cosine) and imaginary (sine) temis. The transform is then aven by eqn. (4.1). where FCk
and AYk are replaced with Fk and Afp respectively, which are defined as
Note that for zero frequency (ka), Im(F,)=O and ai l the sine temis in Af, are also zero, so
that
The sirnultaneous direct and inverse Fourier tnnsforms for a i l the "Fouriei' frequencies are
then given by eqns. (4.5) and (4.1 l), respectively, with F and AC replaced by,
respectively,

Note that there are n observations and ody n-1 coefficients to solve for.
4.3 Least Squares Transform
A more general least squares transfomi (LST) cm be obtained h m the above
ma& form of the discrete Fourier msform (DFT) by reaiizing that the DFT and its
inverse are equivalent to least squares interpolation or approximation using aigonometric
functions (Le., Fourier series) as the basis functions (see, e-g., Vmiek and Krakiwsky
[ 1986, Chapter 121 for a detailed exposition of least squares theory). Specifîcaiiy. a vector
of observations 4 can be approximated in tems of a Fourier series by eqn. (3.1). which
can be written in matrix notation as
where

is the vector of Foinier coefficients to be estimaestimated and A represents the basis
(trigonometric) functions as de- in eqn. (422). Note that for fo=O, there is no
imaginary tem and thus no bo coefficient The Fourier coefficients x can be estimated by
solvhg for them using the least squares mInimization criterion (cf. Vaniiek and Krakiwsky
[1986, pp. 204-2071). The solution is given by
where N =A* A is the nomai equation coefficient rnatrix.
Note that in the above equation AT# is the manix fonn of the (Smultaneous)
discrete Fourier tmsfonn in eqn. (4.5). T'us, the l e s t squares transfomi for aIi
frequencies simultaneously is given by eqn. (4.5) and the transform for each frequency fk
by
where Ak that part of A corresponding to only frequency fk.
The estimated Fourier coefficients in eqn. (4.25) can then be written as
Substituting this in eqn. (4.23) gives the estima& observations
a = A N - I F ,

which represents the simuitaneous inverse least squares aan~fom for a l l Frequenties. The
individual observations Rti) are then given by
where Ap represents the i-th row of A corresponding to time ti.
The conventionai Fourier aansforms are just a s p e d case of these more gewral
Ieast squares definitions for equally weighted and equally spaced data. Although the direct
least squares and Fourier transfomis are equivalent by definition, the quivalence of the
inverse aansfoms is not easy to see h m the ma& expressions. This quivalence can be
shown by examining the elements of Pl. Realizing that the Fourier expressions are valid
only for equally spaced data and the discrete set of "Fourier" fiequencies, it can be shown
that the columns of A form an orthogonal basis under these assumptions. The elements of
N (summations of trigonomemc products) reduce to
n-1 O for k=I=0 or n /2 z ( s i n 2 ~ ~ t ~ sin2 lcfitii) n/t for ~ = I * o or n/2 , id O for k d
Substituting these in N-1 in eqn. (4.28) and expanding in tems of the Fourier transfom
for the individual frequencies gives

The difference between this and the inverse Fourier transform in eqn. (4.1 1) is the use of
n/Z in place of n for non-zero fkquencies (n is assumeci to be even, 0th- n/2 is
nuncated down to the nearest integer). This is because for real data the transforrn for
negative fiquencies is identical to that for positive frequencies. The wIumns of A
comsponding to these fiequencies wii i be identical thus making N singular when
simuitaneously estimating a i l fkquencis. Including only the positive frequencies wiLi
irnpiicitly account for the identical response for both negative and positive frequencies,
thereby effectively doubling the lest squares transform with respect to the Fourier
transform (i.e., it gives a transfonn which resdts in a one-sided specnum as derived in the
next chapter) . Note that the Nyquist fi-equency (at k = a ) is also excluded h m the
summation since this is aliased with the zero frequency.
It is important to realize that for unequally spaced data the inverse lem squares
transfomi in eqn. (4.28) cannot in general be expresseci as a summation of independent
contributions h m individual fkquencies. This is because N in general contains off-
diagonal elernents between frequencies and even beween the sine and cosine components
for the same fkquency; Le., these Fourier components are mathematicaîiy comiated with
each other (Le., they are no longer orthogonal or linearly independent).
4.4 Weighted Least Squares Transform
The above developmenn have irnplicitly assumed the observations to be equally
weighred A more general form of the least squares tmnsforms cm be derived by
w e i g h ~ g the observations using their associateci covariance ma& C+ This also dows
one to mode1 any known correlations among the obse~ations. The generai expressions for

a weighted least squares interpolation or approximation are given by (cf. Va&& and
Krakiwsky [1986, pp. 204-2073)
where N = AT P A is the normal equation coefficient maaix, u = AT P #, is the normal
equation constant vector and P = C+-1 is the weight matrix of the observations.
Foiiowing the same development as for the unweighted (i.e., equaiiy weighted)
Ieast squares transfonns, the more general weighted Ieast squares transf~~lll for all
frequencies sirnultaneously is given by (cf. eqn. (4.26))
and the transfom for each individual frequency fk by (cf. eqn. (4.1))
Using this in the least squares estimation of the Fourier coefficient in eqn. (4.34) and then
substitu~g into eqn. (4.35) gives the inverse kast squares aansfom (cf. eqn. (4.28))
The individual observations Mti) are then

Although the symbolic fomi of these expressions are identical to those for the unweighted
inverse transfm in eqns. (4.26) and (4.271, N and F are de- differently (they include
the weight rnaaix P). Note that the inverse transfm is essentially just a least squares
approximation of @ in terms of a Fourier series.
As stated at the end of Section 4.3. it is not possible in g e n d to separately
esàmate the individuai Fourier transfom values for different £requencies because of the
possible existence of mathematical correlations (non-onhogonality) among the Fourier
components (hg functions) due to unequal data spacing or correIations among the
observations. If, however, the observations are equaily spaced, equally weighted and
uncorrelated (Le., P = 4, and the set of "Fourier" frequencies are used, the normal
quarion ma& becomes a diagonal (Le., N = diag(n, n/2. fi,. . .) and the direct and
inverse least squares transfomis become identicai to eqns. (4.26) and (4.33). respectively,
and are thus equivalent to the standard Fourier ones. The Fourier transfonn is thus just a
special case of the least squares transfona
An attractive feature of the lest squares tmsform is that the covariance ma& for
the Fourier coefficients and the inverse least squares transfonn are pmvided by the lest
squares theory as by-products of inverthg the normal equation manix N (cf. Vani.ek and
Krakiwsky [1986, pp. 209-2101). The covariance matrix for the estimated F o e
coefficients 9 is given by
while that for the inverse transfm (mterpolated/approximated obsewations) is
cg = A Q A T .

It is recalled that oniy frequencies up to, but not including, the Nyquist fkquency
should be included in the Fourier series in order to avoid singularities in N due to the
aliasing effect In addition, if the data are e q d y spaced, only the set of standard
T0urief7 fiequencies should be used (see Section 3.2). Moreover, if the data are reai,
only the positive Fourier fhquencies shouid be included (see pmperty in eqn. (3.23)).
This then allows fm a total of n-1 terms (a-1 cosines and n/2 sines) to be estimated fiom
n observations, which gives a nearly unique solution for the Fourier coefficients and
enables the observations to be repmiuced exactly using the inverse transform.
In addition to a ~ ~ e p ~ g uneqdy spaced data, another advantage of the least
squares transforms are that they are not restricted to only the set of standard Fouria
fiequencies fc = Rl(n At) = k/T for ka, ..., *1. Any set of frequencies in the range (O, f ~ )
can be used in the expressions. However, only a m;ucimum of n/2 fiequencies (n Fourier
coefficients) can be estirnatecl sirnultaneously fkom only n observations. Moreover, some
serious repercussions can aiso arise if the selected fkquencies result in some of the Fourier
components (hg functions) becoming nearly linearly dependent with each other, thereby
producing an ilkonditioned or near singular N. To avoid such ill-conditioning it becornes
necessary to either select a different set of hquencies to be estimated (e.g., equdy spaced
frequencies) or simply neglect the correlations in N (i.e., the off-diagonal blocks) and
esthate the inverse least squares transform separately for the individual frequencies using
eqn. (4.39).
Another problem in dealing with uneqdy spaced data is that the Nyquist
fiequency is not weil defined, if at ail. It was thought that, because a single cycle of a
periodic function can be defined with only 3 points, the smaiiest time interval of a mplet of
adjacent points would represent the smaliest pend which can be estimateci. Care would
also be need to ensure that no pair of points in the triplet are so close together that the niplet
is essentialIy only a pair of points for ali practical purposes. In practice, however, this
triplet interval does not appear to defhe a Nyquist fiequency. As WU be shown in the

numericd tests of Chapter 7, spectra wmputed to frequencies well beyond this implied
Nyquist fresuency do not exhibit the expected mirror image about any Nyquist frequency.
4.5 Effect of Deterministic Mode1
So far it has been assurneci that the original data is stationary and can be modeiied
completely by a Fourier series. In general this is hardly ever the case. It is more common
to first remove the non-stationarity by modebg some hown a priori deterministic trends
using, e.g., least squares fitting and to analyse the residual (stochastic) series using the
above techniques. The problem, however, is that there may be linear dependence beh~een
the deterministic d e l and the periodic components in the Fourier series (the stochastic
mode1) which may significantIy affact the Fomier transfbrm and spechum.
To account for such effects, it is necessary to refomiulate the preceding
developments to accommcxiate both the detenninistic mode1 as weil as the stochastic mode1
(periodic Fourier senes components) in the esthnation of a least squares fransfom
Partitionhg A and x,
the data series (observation) vector 0 is modelled in ternis of both deterministic and
stoc has tic (Fourier series) & components as

For the de temiinistic d e l , AD is the design ma& and XD is the parameter vector to be
estimated, and for the stochastic (Fourier series) d e l , As is the ma& of cusine and sine
basis functions as defined in eqn. (4.22) and xs is the vector of Fourier coefficients to be
estimated as defined in eqn. (424). The aim is to account for the effect of estirnating XD in
the estimation of xs.
The weighted lest squares estimates of the combined parameter vector î. and the
appmximated observation vecmr ) are given by eqns. (4.34) and (4.33, where the
matrices are defined as above. Substitu~g the above partitioned forms of A and x into
these expressions gives
w here
Although, for stochastic modeIIing, we are ~ a U y only interested in k it is
necessary to account for any effect of the d e t e d s t i c mode1 on the estimation of & by
PD. This is obtained by making use of some well-known matrix identities in the evaluation

of Ifs. Specificaiiy. the inversion of the n o d equation maaix N can be written as
Wamiek and Krakiwsky. 1986, p. 281
w here
Substituting into eqn. (4.45) and gives for%
where the so-called "reduced" normal equation and constant vectur are

Defining the "reduced" weight matru< P., whicnch accounts for the effect of the
deterministic d e l , by
the normal equations in cqn. (4.58) can be wristen in the same general fomi as that without
the deterministic model; i.e.,
where
The simultaneous least squares transforrn F* (for aii fquencies simultaneously)
which accounts for the deterrninistic mode1 is then defined in the sarne manner as in eqn.
(4.36):
F* = A$ P* q .
The tmnsform for each individual fiequency fk is then (cf. eqn. (4.37))

Similady, the inverse transform for a l l observations is defined by eqn. (4.38), using the
reduced f o m of N and F, as
and for individuai observations &ti) by
The expressions for independently estirnated frequency components are simply obtained by
ignoring the offdiagond ternis between different frequencies in N* and P*
When there is no deterministic model, AD = O, P* = P and the above expressions
reduce to the same forrn as in the previous section. Note that the weighted inverse
transfomi is essentially just a weighted least squares approximation of # in temis of the a
priori deterministic mode1 and the individual periodic (Fourier series) components.
4.6 Vector Space Interpretation
The least squares aansform can be more elegantly interpreted using the concept of
Hilbert spaces and commutative diagrams using the language of functional analysis. The
fundamental component of functiond anaiysis is the space, in which we want to work.
The elements in a space c m be real numbers, complex numbers, vectas, matrices as well
as huictions of these. Here we consider the more restrictive case of vector spaces
consishg of sets of vectors which can be visualized as positions in the space. A brief

review of functional analysis as it applies to the geomeaical interpretation of the least
squares rransform is given. For more on functional analysis see, e.g., Kreyszig [1978].
There are various classifications of spaces. The most generai type of space is the
rnetric space in which the concept of a distance (or menic) p(*y) between two eiernents x
and y in the space is defined. A nonoed space is a memc space in which a nom II*II may be
induced as the distance h m the ndï element. The norm IMl of a single element x is just its
length p(x,O). A Hilbert space is a normed space in which a scalar (or inner) product
ap for a pair of elements x and y rnay be induced by the relations
There are many ways of defining a scalar product For vector spaces of f i t e
dimension the most common is the simple linear combination of vector elements; Le., for
vectors x and y ,
For compact vector spaces the analogous form of the scalar product is
A more general definition of the discrete scalar p d u c t , and the one used here. is the norm
defineci by

where P. the weight maaix for the v e c ~ space, is g e n d y the inverse of the covariance
ma& of the vector elements. This curresponds to a generalization of Euclidean space with
metric tensor I, into a Riananian space with metric tensor P. Note that for compact
manices, the vectm and manices wiil also be compact, and contain con~uous functions.
An interpretation of basic least squares theory in terms of functional analysis is
aven by VaniEek [1986]. The theory is interpreted using commutative diagrams which
desmïbe the various transformations between probabilistic (Hilbert) spaces. The same
diagram can be used to interpret the least squares transfom In this diagram @ is the
observation vector belonging to the observation space @, C4 is the observation covariance
matrix (not necessarily diagonal) defining the scalar product (and nom and distance) in this
space. x is the parameter vector of Fourier coefficients to be estimated belonging to the
parameter space X and A is the design ma& tmnsforming the observations to the
parameters, which contains the sines and cosines functions (basis functions).
The commutative diagram is set up by first defining the transfomation (i.e., the
observation equations) #=Ax from the parameter space P[ to the observation space @. The
weight matrices Px and P@ define the nansfonnations to the dual parameter space and
dual observation space @*. respectively. The transfomation h m the dual observation
space @* to the dual parameter space P[*. is defined by A ~ . Asslmiuig the design matrix
A and covariance ma& Ce are known, the rernaining transformations can be obtained
h m the commutative diagram using the following steps.
1. Pq, = C#-'
2. pX = A T P ~ A cX = P E I
3. A- = C,AT P# = (ATP* A)-' AT Pf
4. F = AT P#

These steps are Uustrated in Figure 4.1. Here, F is defineci sIightly differently ththan in the
pRceding developments. It repmsents the transfomi operator that acts on the observations,
and wt the entire transform itself as dehed in Section 43. Sindarly, F-1 is the inverse
operator.
It can be seen h m ihe commutative diagram that the Ieast squares Fourier
~ s f o m F is a trausfbrmation h m the observation space 8 to the dual parameter space
via the dual observation space 9'. The inverse least squares Fourier transform F-z is
then deriveci by proceeding fkom the dual parameter space to the observation space
via the parmeter space X.
Observation Space
Observation Space
Figure 4.1: Commutative diagram for the direct and inverse least squares ~ s f o r m ,
where F denotes the direct transform and F-l the inverse transfom.

The design matrix A contains the trigonometnc functions definiog the Fourier saies
representation of the observations. The individual sine and coshe terms (columns of A)
fom a basis for the obmaaon space. For the standard Fourier transfonn, the data are
equally spaced, equaily weighted and uncmlated so that the columns of A form an
orthogonal basis. The norrnai equation ma& N =AT P A then becornes a diagonal
ma& a s does the covariance rnatrix of the parameters. In the more generai least squares
aansfomi, the base functions are not necessarily orthogonal, although, in practice, this is
usually the case even with unequally spaced data.
4.7 Applications
The above least squares transfomi can be applied in the same mariner as the
traditional Foinier one, with the added advantage that they can be used not only for e q d y
spaced data senes, but also for unequaiiy spaced senes and for any arbitrary set of
fkequencies. One of the most important applications (to be discussed in the next chapter) is
the detdnat ion of the power specaal density fa unequaliy spaced data that also accounts
for a detemiinistic model. In this case there is no need to determine a frequency response
function for the detenninistic model in order to remove its effect f h m the specaum of the
model residuds. The correct spectnim is obtained directty when the detenninistic model is
acwunted for in the formulation of the spectrua
Another important application of the lest squares transfomi is the indirect
estimation of autocovariance/aut~~ofielation functions using the correlation theorem (see
Chapter 6). Instead of transforming the effect of al l the spectral values, a s m o o t k
autocovariance function cm be obtained by uskg only the significant specaal values.
Because these significant spectrai components are not likely to be evenly spaced, it is
necessary to use the inverse least squares transform to convert hem into an autocorrelation
function.

The inverse least squares tram$ann can also be used in data series approximation
and interpolation problem. In these applications the direct Fourier transform is used to
estimate FourÏer series coefficients, which are then used in the inverse t rans fm to
approxirnate or interpolate the original Senes. The degree of smoothing of the Onginai
series can be increased by induding only fiequencies corresponding to highiy significant
Fourier coefficients (or specaal peaks).

Chapter 5 The Least Squares Spectrum
5.1 Introduction
As dimissed in the previous chapters, traditionai mtthods of detemiining power
spectral density and autocorrelation functions are significantiy limited in their application
because they always require the &ta to be equally spaced in the argument. Other reasons
for seeking alternative techniques are concénied with the limitations of the discrete Fouier
transfomi and FFI' commoniy used to generate spectra as weli as autocorrelation functions
(ûansfomied from the spectrum). These include the use of only the set of "Fouriei'
fkquencies (integer multiples of the fundamental fresuency), and the requkment of 2n
data points (for the FFT algorithm). In addition, the aaditional techniques do not consider
any interaction (correlation) benveen the determinisac mode1 and the implied periodic
components modelled in the s p e c m . Moreover, the data cannot be weighted in the
transform computation in accordance with their assumai probability density hinction.
Thus, some observations with relatively large random errors will be weighted the same as
other observations that may be many times more precise.
Traditional methods of cornputhg power spectral density functions h m unequally
spaced data have often been based on interpolation or approximation. That is, the original
unequaily spaced data series was interpolated or approximated to an equally spaced series
for which the standard Fourier techniques could then be applied The problem, however,
is that this approach really mates a new data series that depends on the smoothness of the
original series, the presence of data gaps and the subjective choice of the interpola~g or

appmximating fiinction. The interpoIation also tends to smooth out any high frequency
components of the original data Senes.
To overcome these limitations and difficulties, VanRIek [1969a] developed a method
of spezûum computation based on least squares estimation. This method was M e r
developed in V a e k 1197 11, Steeves [ 198 11 and Wells et al. [1985] and forms the basis
of other Simüar techniques in slightly different f m promoted by various authors since
(e.g., Rochester et ai. [1974], Lomb [1976], Ferraz-Meilo [1981], Scargle [1982], Home
and Baüunas [1986]). In this Chapter, the same basic lest squares spectnim is
reformulated in ternis of the newly developed least squares transform. A new
"simdtaneous" spectrai estimation procedure, somewhat simila. to that used by Rochester
et al. [1974], is also developed.
5.2 Matrix Form of Fourier Spectrum
Before giving the expressions for the least squares spectrum, the Fourier spectrum
is first expresseci in matrix fom. This is done by simply using the matrix expressions for
the Fourier transfomi (eqns. (4.9) and (4.21)) in the definition of total power (eqn. (3.47))
and the individual Fourier spectral estimates (eqn. (3.48)). Parseval's relation in eqn.
(3.47) can then be written in mabtix notation as
1 Total power = eT# = n F=F .
where

The individual spead components for the twesided power spectral density function (eqn.
(3.48)) are then given by
The one-sided spectral density function is twice the two-side function and is defined by
1 1 - F ~ T F R = $~(f~)12 for k = O n
~0%) = (5.3 L F k T ~ t = ; I F ( ~ ~ ) I ~ f o r k = l ... n12-1 n
5.3 Least Squares Spectrum
The Least squares specmim was originally developed by V m i e k [1969a; 19721 (see
also Steeves [1981] and Wells et al. [198q). The expressions for this form of the least
squares specaum (referred to here as the '%onventional" form) can be developed in terms of
the (unweighted) least squares tiransform. First, the total power is given by
Total power = #T @ .
Substituting for the inverse least squares transform in eqn. (4.28) results in
Total power = @T # = FT N-1 F .

Note that, g e n d y , the total power cm not be expressed as a sum of individual
contributions h m the different fkquency mmponents. As with the inverse least squares
nansform, the problem is that with unequally spaced data, N is not a diagonal matrix
because the Fourier components (hg fwictions) are not orthogonal to (lineariy independent
of) each other. As explallied above, this problem is avoiâed by simply examining one
fhquency at a time, independently (out of context) of the othm. This is quivalent to
ignoring the iinear dependence between different fiequency components in N and amomts
to d e m g the spectnun as the independent contribution of each fkquency component to
the total power.
FoIlowing this approach, the s p e c d component sud (for the one-sideci l w t
squares power spectral density function) is defineci by
where Nk is the k-th diagonal block of N correspondhg to frequency fk. The normalized
spectral values T V , are then
The nomialized specmim represents the percentage of variation in the original data Smes
independently expiaineci by each s p e d component. In its basic phüosophy, this
corresponds to the ~2 statis tic in regression analysis m p e r and Smith, 198 1, p. 331.
One of the most signifiant advantages of the l e s t squares spectnun, other than
handhg unequaiiy spaced data, is the ability to estimate spectrai components for any real
(arbitrary) fnquency, not just the set of 'Fourier" fiequencies. The expressions in eqns.
(5.8) and (5.9) essentiaiiy provide continuous estimates for any set of fkpencies. The

usual procedm is to take a set of equally spaced frequencies between zero and the
e s tk t ed Nyquïst or maximum frequency (note that the Nyquist frequency is undefirred for
unevenly spaceà &ta as discussed Section 4.4). The pnxise fkquency location of
signifiant peaks cm then be detennùied by "mrning" in on that frequency area of the
specaum. This allows one to locate mencies for significant peaks to any resolution,
within the Iimits of the &ta sampling.
5.4 Weighted Least Squares Spectrum
The more general weighted least squares power specmun is obtained in a similar
way except that the general (weighted) least squares transfom are used in the above
developrnents. In this more general situation of an observation weight marrix, the total
power is defined by the weighted sum of squares as
Total power = #T P # , (5.10)
where P is the inverse of the observation covariance ma&. Substituthg for @ using the
weighted least squares inverse transfomi in eqn. (4.38) and n o ~ g that A= P A = N gives
Total power = #TP # = FTN-1 F. (5.1 1)
Vmiek [1969a] defines the spectrum as the independent fiequency contributions to
this total power (cf. eqns. (5.8) and (5.9)). That is, each frequency component is
estimated independently, or out of context, of the others. Steeves [1981] extends this
approach by incorporating the weight matrix (P) of the observations. The independent
estimate of each spectraI component is then obtained using the weighted lest squares

transfomi h m eqn. (4.36) in the specaal estimates given by eqns. (5.8) and (5.9). whae
the weighted normal equation matrix Nk for the k-th specaal component is defined by
This type of spectrai estimation is referzed to here as "independent" or "out-of-context"
spectral estimation.
An alternative approgch to least squares spectral estimation ain be deweloped in
which aii spectral components are estimated sirndtaneously; Le.. in the context of the
others king present This appmach takes into account the non-onhogooality (mathematical
correlations) between the specuai components. It is effectively equivalent to the
geometrical projection of the total multidimensional quadratic fomi representing the total
power, ont0 the subspace for each individual spectral component This is analogous to the
way in which quadratic fonns and confidence regions are dehed fm station coordinates in
geodetic networks. This estimation method is developed by first realizing that in eqn.
(5.1 1) for the total power the inverse of the normal quation matrix N-1 is equivalent to the
covariance matrix for the simuitaneously estimated Fourier coefficients (cf. eqn.
(4.40)). The total power can then be wrinen as
Total power = FT Cp F . (5.13)
Substituting for the weighted least squares transform in eqn. (4.36). the total power can be
expressed in te- of the estirnated Fourier coefficients:
Total power = $T Ccf-l/: .

The weighted edeast squares spectruru is defined as the contribution sud of the
individual fkquency componena (Fourier coefficients) a> the total power. That is, the
quadratic fomi of the estirnateci Fourier coefficients for individual frequencies is
where Cpk is the k-th diagonal block of covariance matrk C*. Substitu~g back in the
weighted least squares transform in eqn. (4.37) fot individual £kquencies, gives the
weighted least squares specaal values
which account for any non-orthogonality (mathematical correlations) among the different
specuai components. Note that Cgk is not the same as Nk-l in the expression for the
independently estimateci (out-of-contutt) l e s t squares specaum. Using the k-th diagonal
block from Cgk is the same as extracting the k-th diagonal block £kom N-1 instead of from
N as in the conventional expressions (cf. Steeves [1981]). Thus, eqn. (5.16) may also be
written as
The nonnalized spectral value S(&J for frequency fk is obtained by dividing by the total
power, i.e.,

This type of spectral estimation is xferred to hcre as "simdtaneous" or "in-context"
spectcai estimation.
AU linear dependence (mathematicai correlation) among the fkquency wrnponena
are accounted for in this simuitaneous estimate of the weighted least squares spect~m,
When the correlations between the frequency components are ignoreci, N homes a
diagonal manu of normal equation matrices Nk fm each individual frequencyfi and C& =
~ ~ - 1 . The expressions aven here are then equivalent to those in Sreeves [l98l], for the
independent estimation of spectral components where no decerministic mode1 is considered.
When the data are also equaily weighted, these expressions are identical to those in Vmiek
[1969a; 19721. When the data are equally spaced and the set of Touriei' frequencies are
used, N-1 = diag(2/n), and the weighted Ieast squares specnal values are then equivalent to
the standard one-side Fourier ones given by eqn. (3.4 1).
Vaniiek [1969a; 19721 also includes some simplifjhg trigonomerric identities that
make the evaluation of the elements in N-1 more efficient for equaliy spaced data (see ais0
Wells et al. [1983). These have been omitted h m the developments here for the sake of
simplicity, although any routine application of these shodd include these optimhations to
d u c e the required computationai effort
This approach is also similar to that used by Rochester et al. Cl9741 in that
correlations between different muencies are accounted for. However, the correlations
among the coefficients for same frequency are implicitly ignoreci in their expressions
because of the use of complex notation. The real (cosine) and imaginary (sine) tems for
the same kquency are treated independently. Only when the data are equaliy spaced is
theV approach equivalent to the preceding ones.
The same comments on the Fourier rransform regarding frequencies greater than the
Nyquist frequency also apply here for the sirnuitaneous estimate of the N l y weighted least
squares spectrum. Singularities in K.' should be avoided by using only frequencies up to

the Nyquist fkequency. Frequencies that are too closely spaced cm also cause ill-
conditionhg problems in the simuitaneous estimation of different spectral values.
Finally, it should be emphasized that these definitions of the least squares specmun
do not satisfy Parseval's relation. That is, the surn of the these spectraX values does not
equal the total power in eqn (5.7). Because of the correlation among the frequencies, there
is no equivalent to Parseval's relation for unequdiy spaced data.
5.5 Effect of Deterministic Mode1
In the developments thus far, the mathematical comlations mear dependence)
between the specnal components and any detemiùiistic mode1 have been ignored, as they
are in the traditional Fourier method. One of the most signincant contributions of VaniEek
[1969a; 1972 ] was the incorporation of the effect of any a priori deterministic mode1 in the
determination of the spectrai values. An important consequence (advantage) of this is that it
alleviates the need to deterrnine frequency response functions for the determùiistic d e l .
In the context of specmim estimation, fkquency response functions are used to account for
the effect of the detemiinistic model on the spectrum. Here, the determinisistic effects are
modeiled explicitly in the formation of the expressions for the estimation of the spectral
components.
The effect of the detemiinistic model on the spectrum is obtained in the same way as
for the inverse least squares trmsforrn in the previous chapter. The spectnun is defined as
the coniribution of each frequency component to the total power. This can be expressed in
terms of the quadratic fonn of the estimated Fourier ooefficients 2 as in eqn. (5.15).
However, to account for the effects of the deterministic model, the quadratic form must be
based on estirnates h m the combined detenninistic and "specaal" model as explained in
Section 4.5. That is, the spectral component sud for fiequencyfk is given by

where the ma& components for fkequency fk are, fkom eqn. (4.62).
Pk = N*-1 ** = N C I A ~ T p* @ ,
N*-1 and P* are dehed in eqns. (4.64) and (4.6 l), respectively. Note that these
expressions are formaily identical to those without a deterministic model. except that the
"reduced" weight ma& P* in eqn. (4.61) is used in place of P. The effect of the
deterministic model is thenfore completely containeci within p.
Foliowing the same substitution procedure as in the previous section, the Ieast
squares estimates of the spectral values cm be wrinen in terms of the weighted Ieast
squares msfotn FE in eqn. (4.67) as (cf. Vaniiek (1 97 1, eqn. (2.4)])
The normaiized spectrum is defined as before to be the percentage of the variation in
the data explaineci by the each spectral component. In the presence of an a priori
detenninistic model, this repments the variance explained by each spectraI component
which is not accounted for by the deterministic modeI. The part that is not explained by the
deterministic mode1 is just the residuals r~ finnom the deterrainistic mode1 alone. That is,
using the notation of Section 4.5,

where
and N m and UD are defined by eqns. (4.47) and (4.51), respectively. Expanding r D and
rearranging gives
a = ( z - A ~ N ~ ~ - ~ A ~ ~ P ) #.
Substituting this in the quadratic form of r~ and simpWyhg resuits in
rDTPrD = # T ( P - P A ~ N ~ ~ - ~ A ~ ~ P ) # = @'P*#, (5-26)
where P* is the "reduced" weight matrix accounting for the deterministic model. Dividing
the spectral values eqns. (5.22) by (5.26)- the n o d z e d spectnim that accounts for the
deterministic mode1 is
The consideration of which frequencies to include in the weighted least squares
spectmn must be done very carefully when accounting for the effects of a determuiistic
mode1 (it is effectively undefined in the spectruxn estimation). This is especidy important
if penodic trends are present in the d e t e d s t i c modeI. In that case, the spectral value for
the same frequency is undefined because it has effectively been accounted for in the
deterministic model and is therefore undefined in the least squares specmim; ie., the
periodic component in the detenninistic model and the same component in the spectrai

mode1 will be pesfectly lineariy dependent. Evaluating spectrai components for the same
fkequencies as the periodic mnds wiU mul t in a singular nomial equation manix p.
Present algorithms for the least squares spectrum (e.g., Wells et al. [1983) check for this
situation by inspecting the detemiiaant of Nk*; a zcro or near zero value indicates a
singdarity and thus an undefineci specnal value.
Ignoring oorrelations between spectrai components is @ d y acceptable within the
context of improvhg the deterministic modeL In this case the objective is to iteratively
search for only the largest spectral component in a residual &ta series h m a deterministic
modeL Any significant spectral values can then be incorporated into the deterniinistic
mode4 either explicitly as a periodic trend or irnplicitly as part of a more complex mudel of
the underlying physicai processes. In this way the rnethod effectively accounn for the
correlations among only the most sipnincant spectral cornponents that are iterativeiy
included in the dete-stic model.
5.6 Statistical Tests
Another p t advantage of the Ieast squares spectrum is that the signifïcance of the
least squares spccaal values can be tested statisticaiiy in a rigorous mamer. The following
statistical tests are based on S teeves [ 198 11.
It is weIl known in statistics that a quadratic fom has chi-square distribution with
degrees of W o m q u a i to the rank of the weight matrix. Expressing the estimated
spectral values in terms of the quadratic fom of the estimated Fourier coefficient& in
eqn. (5.15), this quantity then has a Chi-square distribution x ~ ( u ; 1-a) with u=2 degrees
of fkeedom (represen~g the rank of the covariance ma& C& for the two Fourier
coefficients for frequency fC) WaniZlek and Krakiwsky, 19863. A statistical test of the nuil
hypothesis %: SUR) = O can then be made using the decision function

S ~ 2 ( 2 ; L a ) ; accept Ho: su',) = O > ~ 2 ( 2 ; 1-a); reject Ho
where a is the signincance level of the test (usually 5%).
If the scale (Le., a priori variance factor 002) of Cg is unlaiown. the estimaM
value can be obtained fkom
where v = te2 is the degrees of freedom (two degrees of needom lost to the estimation of
the two Fourier coefficients). This estimateci variance factor is used to scale the covariance
ma& Ceb which then has a Fisher distribution F(v.u; 1-a) with -12-2 and u=2 degrees
of freedom. A statistical test of the null hypothesis I&: slfk) = O can then be made using
the decision function
{ I F(v ,2; 1-a); accept Ho: s(fk) = O > F(v.2; 1-a); reject Ho
The distribution of the normalized spectral values is obtained by h t rewriting the
quadratic foxm #T TP @ in temis of the residuals 3 and estimateci observations @hm the
spectral model. RealiPng that
the quadratic foxm of the residuals can be expressed as
r V r = # T ( P - P A N - ~ A T P ) ~ = $Tp*$.

Noting that P = Cg and rearranging,
Thus, the quadratic form of the observations is
which represent the total power. The quadratic f m on the right si& of eqn. (5.34) are
weLi known ( s e , e.g., Vaniiek and Krakiwsky 119861). The quadratic f m 9$' Cpk-I
Pk of the estimated Fourier coefficient has a Chi-square distribution with 2 degrees of
fkeedom (the number of Fourier coefficients for frequency fd. The quadratic form rT P r
of the residuals has a Chi-square distribution with w n - u degrees of freedom, whae u is
the total number of Fourier coefficients being simultaneously estimated (if the spectrai
values are king estirnateci independently, then u=2).
Using eqns. (5.15) and (5.34) in the expression for the nomalized spectrai value in
eqn. (5.1 8) and rearranging gives
where the ratio of ovo quadratic forms in the denorninator has the following Fisher
distribution

where "-4' means '7s distributed as", and v and 2 are the degrees of fieedorn of the
numerator and denominator, respectively. Note the use of the a probabilin/ level instead of
1-or This is because of the inverse relation between this F statistic and the spectral value
(for which we want the 1-a probabiiity level). Given the distribution of the ratio of the
quadratic fomis in eqh (5.35). the disaibution of the nomialized spectral value is then (cf.
S teeves 1 198 1, eqn. (3.19) 1)
A statistical test of the null hypothesis &,: = O c m then be made using the decision
fimction
The above Fisher disaibution can be simplifieci M e r using the inverse relation for
the Fisher distribution [Freund, 197 11,
When the first degree of hedom is NO, this can be approximated by [Steeves, 198 11,

This results in a statisticai test of the nuii hypothesis %: Svd = O using the decision
function
The statistid tests for specaal values that account for the presence of any
detemiùiistic mode1 are exactIy the same as above, except that the "reduced" observation
weight manix P* is used in place of the a d weight math P in the computation of the
quadratic forms.
The above tests are the so-cdied "out-of-context" tests, which test the individual
spectral components out of context of the others king escimated (see VaniZek and
Krakiwsky [1986, p. 229-23 11). They are identicai to those in Steeves [1981] and apply to
the independent estimation of the spectral cornponents, but not to the estimation of a i l the
specaal values simultaneously. In that case the "incontext" test should be used which
takes into consideration the estimation of the other spectral cornponents. Two approaches
can be used in this regard. The simplest one is to use the simultaneous confidence region
for all m fiequency components being estimatecl. This gives the same test as in eqn. (5.41)
except that 2m degrees of freedom is used in place of 2. However, this approach usuaily
results in tw pessimistic (large) a b i t to be any real value. A better approach is to use the
relation between the simultaneous probability a for the joint test of all spectrai components
together and the "local" probability a;, for the test of each spectral component separately.
Foilowing Miller 1 19661, the relation is given to first-order approximation by a, = dm.
The in-context test is then obtained by using in place of a in the above tests. NOIE that
Press and Rybicki [1989], Press et al. 11992, p. 5701 also use the in-context test based on

simultaneous probability. However. they incorrectly apply it to the testing of the
independently estiniated specnai components, where the correlations among the different
fkquency cornponents is ignoreci. The in-context test should only be used for the
simultanews estimates of the spectral values, where the correlations among al l the
frequencies used is accounted for.
5.7 Estimation Algorithms
As stated at the begidng of this chapter, th- have been a variety of papers since
Vaniiek, [1%9a, 19711 describing the same least squares spectrum (independently
estimated spectral components) in slightly different fom; e.g., Lomb 119751, Fenaz-
Mello 119811, Scargle [1982], Home and Baliunas [1986]. It can be shown, however, that
under the same assumptions ail of these are identical to Vaniiek's more general approach.
The ciifferences are only the use of slightly different nomiatization methods and different
numencal methods for solving the normal equations.
In Vaniiek [1969a], the direct inversion of the 2x2 normal equation matrix is
optimized by using an analytical expression. in addition to king the fastest algorithm, it
also accounts for the presence of a priori deterministic models and includes various
trigonometric identities for greater efficiency, especially for equally spaced data Compared
to the FFT, however, the least squares aansfom and specmun are cornputationaiiy much
slower. Unfortunately, a diioct comparison of computational speed could not be made
because of the software useci. AU tests were perfofmed using the MATLAB software,
which has a built-in (compiled) FlT function optimisai for speed whereas the least squares
specmun algorithm was implemented as an extemal (interpreted) function. Because
extemal fûnctions execute much more slowly than built-in functions, no fair comparison
between the FiT and least squares algorithms couid be made in M A T M . Nevertheless,

when confionteci with unevenly spaced data, the least squares method is the only axrect
approach to use.
Lomb [1975] and Scargie, 19821 solve the n o d equations using an
orthogonalization (diagonakation) procedure based on tirne shifnng (a different time shift
is needed for each frequency). This approach is slower than the dgecl analytical solution of
Vmiek. It &O does not account for the prtsence of any a priori models, except for a
mean. Ferraz-Mello [1981] uses Gram-Schmidt orthogonalization to diagonalize the
normal equarions. Again, this procedures is slower than direct anaiytical inversion and
does not account for the presence of any a priori deterministic modek.
Recently, Ress and Rybicki [1989] have developed a novel approach to the fast
computation of a least squares spectnim. It is based on the concept of "'extirpolation" and
the use of the FFî. Basicdy, exthplation gives an equally spaced data series bat, when
interpolateci to the original times, gives back exactly the original data series. This is also
called reverse interpolation. The FFT is used to evaluate the evenly spaced (extirpolated)
sine and cosine sununations in the tirne-shifting algorithm of Lomb [1975]. The original
extirpolation algorithm used two complex FFïs. The more efficient algorithm uses the
same trïgonornetric identities us& by Vaniiek [1969a] to reduce the computations to only
one FFT. The biggest disadvantage of this method is that it's lirnited to only the set of
ccFourier" frequenties due to the use of the FFT. It is thus not possible to " m m in" on
significant peaks to better resolve the frequency. The FFI' also requires 2" data points,
which necessitates zero-padding the data senes. As for the other algorithms, the presence
of a priori detenninistic models cannot be accounted for. Finally, the extirpolation accuracy
depends on the "oversampling factor" used in the extirpolation to genaate many more data
points than the original data senes. Gream oversampling of the extirpolated series
provides better accuracy but results in more computations. In spite of the above
limitations, this algorithms works very weU and very fast (on the order of n logn, ins&
of n2).

Chapter 6 Stochastic Modelling of Observation Errors
6.1 Introduction
The weighted least squares estimation model aliows for the stochastic modehg of
residual errors through the use of a M y popdated covariance manix. This can be used to
account for those systematic effects that have not been modelIed explicitly
(detefministically) in the design rnatrix fa the least squares model. The problem with
using f d y popuiated covariance maaices in this rnanner is the diaculty in detamining the
covariance or correlations among the observations in an objective way.
There are a few rnethods that cari be used to d e m e the variance and covariance
each with their own advantages and drawbacks. One of the most popular of these are the
rnethods of analysis of variance and variance-covariance component estimation. The
"anaiysis of variance" (ANOVA) method (also called factur analysis in statistics) cm be
found in most standard texts on statistics. Geodetic applications of the technique are
describeci in detail by Kelly [1991] and in a series of articles by Wassef 11959; 1974;
19'761. Essentiaily the aim of the method is to divide the measurements into separate
groups (factors which contribute to the overall variation in the data) and to estimate the
variance cornponents for each. The difficulty in applying the method is in dennuig a
scheme of dividing the observations into separate groups which charactcrize some
behaviour of the systematic eEect king modeiied. Often, the factors describing the
systematic effect cannot be so discretely defined, rather they are often of a continuous
nature that precludes lumping them together into separate and distinct groups.

Variance-covariance component estimation, on the other hand, is based on
modelling deteminktically the residual variation in the measurernents. The variances and
covariances are expressed in ~ ~ T K U S of iinear modek relating these components to various
factors describing the systematic effect The coefficients (variance and covariance
components) in the variance-covariance model are estimate- together with the paramettas in
a least squares solution. The technique is describai in detail in Rao and Kleffe [1988] and
has been appiied to many geodetic problems (see, e.g., Grafârend et al. [1980], Grafarend
[1984], Chen et al. [1990]). It can be shown that the analysis of variance method is just a
special case of this more general approach [Chnanowski et al., 19941. The problem with
applying the methad is that the estimation of the variance-covariance mode1 coefficients
usually needs to be iterated which can result in biased estirnates of the variances and
covariances [Rao and Kleffe, 19881. This c m lead to negative variances, which is
unaccep table.
The approach taken here is m mode1 any residual systematic effects remaining after
accounting for a detemiinistic model, usuig autocorrelation (ACF) or autocovariance
(ACVF) functions derived h m a power spectral density function of the residuals. This
idea was first proposed for geodetic applications by Vaniiek and Craymer [1983a; 1983b1
and M e r developed by Craymer [ 19841. To accommodate unevenly spaced dam, a
general least squares transfm is developed to determine the nomialized power spectrurn.
The inverse transforrn is then used to convert this to an ACF which is converted to an
ACvF.
6.2 Direct Autocovariance Function Estimation
The autocovariance function of an equaily spaced data &es i(td can be estimateci
directly using the expressions given in Chapter 2. This gives the sample autocovariance
func tion

1 C(z,) = - n-m
where rn = zm/& is the so-called lag number and dr is the data series spacing. No= that, as
in eqn. (2.20), the summation is divided by twn rather than by n, in order to provide an
unbiased estimate of C(rJ. The biased estimate is obtained by dividing by n.
For uneqdy spaced data which are relatively homogeneously disaibuteci, an
averaging procedure cm be used. In this approach the unevenly spaced lags are àivided
into equaily spaced lag intervals or bins, similar to the way in which histograms are
constnicted. Ail lags within the lag inmal are summed together in (6.1) to give an
average autocovariance for the lag interval. This method gives a smthed estimate of the
autocovariance function. The problem is that if the data have large gaps, the lag intervals
may need to be relatively large, resulting in degraded resolution See VaniZek and Craymer
[1983a;b] and Craymer (19841 for more details of this technique.
6.3 Autocovariance Function Estimation via the Spectrum
The autocovariance function for an evenly spaced data senes can be most
conveniently derived fiom the power spectrai density function using the Fourier transfom.
As discussed in Section 3.4, the autocovariance function c m be expresseci as the Fourier
transform pair with the spec- and the autocomlation function R(t) as the transfomi pair
with the nomialized spectrum. These expressions in terrns of the spectnun are ofien used
as the basis for the efficient computation of autocovariance and autocomlation functions of
evenly spaced data using the FFï. It wiU also be used as the basis for deveioping
autocovariance functions for unevenly spaced data to provide objective a priori estirnates of

covariances and weights that account for residual systematic effects in least squares
modellhg.
As mentioned in Section 3.4, care must be exercisad to avoid any "wrap amund" or
"end" effects when compu~g the autocovariance or autocomlation function b m the
s p e m This is most easily achieved by simply paddîng the data series with zeros out to
double the length of the original Senes. Furthemore, this indirect estimation via the
spectrum pmvides the biased estimate of the autocovariance/autocorrelation function. As
recommended by Bendat and Pierso1[1971, pp. 3 12-3141 and Pnestiey [1981, pp. 323-
3241, this should be used in preference to the unbiased estimate because the biased one is a
positive definite function which generates a positive definite covariance matrix. The
unbiased ACF and ACvF are not positive definite and result in suigular covariance marrices
that are not suitable for generating weight matrices for least squares models.
6.4 Iteratively Reweighted Least Squares Estimation
The covariance ma& generated h m the autocovariance function is used to
smchastically model the residual enas in the detaministic least squares d e l . The basic
idea is to begin with some a priori estimate of the covariance ma&, usudy a diagonal
maaix of known variances. A les t squares solution is obtained for the deterministic mode1
and the observation residuals provide an estimate of the random observation emrs. The
autocorrelation funaion is determine. for these residuals in order to obtain a more realistic
estimate of the correlations among the random obsewations e m . This autocordation
function is then used together with the a priori variances to generate a new covariance
function for the observations which is included in a new lest squares solution for the
dete-stic model and new estimate of the residual observation enws. Anorher
autocorrelation function is then computed and the whole estimation process is repeated
(iterated) until the solution for the detemiinistic mode1 and covariance matrix converge to a

stable form This is referred to an iteratively reweighted least squares estimation and is
identical to the iterated MINQUE technique exœpt that a dekministic mode1 is used tfiere
to rnodel the variances and covariances (see Ra0 and Klcffe [1988]). The procedure is
illustrated schematicaily in Figure 6.1.
from A Prion Variances
Weighted Least Squares 1 Solution for Deterministic Model
1 611 ~ovariansmatrix using ( ACF and A Priori Variances
I
Figure 6.1: Iteratively reweighted least squares estimation process.

Chapter 7 Numerical Tests
7.1 Introduction
In this chapter, various n d c a l tests of the least squares transfm and spectnim
are given under a variety of d.erent situations. Throughou~ the following terminology
and notation is used:
'Tourier" frequencies
LST
ILST
LSS
Independent LSS/ILST
Simultaneous LSS/ILST
Unweighted LSS/ILST
ACF
Indirect ACF
Set of integer multiples of the fundamental fkequency
Least squares transfonn
Inverse least squares transfm
Least squares spectnim
Independent estimation of the LSS or EST £i-equency
components
Simultaneous estimation of the LSS or ILST fhquency
components
Estimation of U S or ILST using equally weighted
obsexvations (no weight ma& P used)
Estimation of LSS or LST using weighted observations
(weight matrix P used)
Autocorrelation function
Indirect estimation of the autocomlation function via the
EST or the LSS

The tests presented here are based on simulateci data using a pseudo-random
number generator for n o d y distributed obmation e r r ~ r s and unif'ormiy distributed,
unequally spaced times. Udess otherwise stated, these tests use a deterministic mode1
consisting of a periodic trend with @od 10 (frequency 0.1 Hz). AU computations were
performed using the MAT- numerical and graphical software system.
Tests were perfonned to ascertain the effects of the following on the LSS and
indirect estimation of the ACF:
random observation emrs
correlations among observations
random sampling (unequally spaced data)
fkequency selection
deterministic modd
non-stationary random emrs (random walk)
The effects on the LSS and ACF were determined by comparing the results to the known
theoretical form for both functions.
7.2 Effect of Random Observation Errors
To study the effect of random observation mors, three data series of 100 equally
spaced points were used Each was composed of a penodic trend of amplitude 1 and
p e n d 10, Le., frequency O. 1 Hz. The first series contained no observation mrs. The
second series contained normally distributed random emrs with a standard deviation of
1B. The third data series contained nomaliy distributed random emrs with a standard
deviation of 2/3. The three data series are ploaed in Figure 7.1.
The least squares spectra (for "Fouxïer" frequencies) of the three data stxies are
given in Figure 7.2. &th the independently and simdtaneously estimatecf spectral values

wiU be identical in these tests because the data are equally spaced, equdy weighted and the
set of "Fourier" frequencies is used. The effect of random observation erm on the LS
specmmi is to reduœ the magnitude of the kgest spectral peak, which in ai l cases is
correctly located at the kquency of the periodic trend The iarper the random errer, the
greater the reduction in the spectrai value for the significant peak. The magnitude of the
reduction in the peaks is equivalent to the inverse of the square of the signal to noise ratio
(ratio of amplitude of periodic signai to standard deviation of noise).
The direct estimates of the autocorrelation hinctions for the three &ta series are
given in Figure 7.3. These are unbiased estimates and were estimateci using eqns. (2.20)
and (2.12). The ACFs al l exhibit the expected coslie form. However, the functions all
display correlations larger than one at large lags, typicai of the unbiased form. As
explained in Section 3.4, this s o - d e d "wild" behaviour is the main reason the unbiased
estimate is not used.
The biased estimates of the autocorrelation functions are aven in Figures 7.4 to 7.6
for the three data senes, respectively. Both the direct estimate and the indirect estimate via
the invme LS transfomi of the LS specmim are given as weiï as the difference between the
nvo. The indirect estimates were denved following the procedure described in Section 6.3,
where zero-padding is used to avoid any "wrap arounb' effem (see Section 3.4). As
expected, a l l three ACFs exhibit the correct sinusoicial shape and tapeMg characteristic of
the biased estimate. However, there is a reduction in the mgninide of the wrrelation as the
random error increases. AIthough the differences between the direct and indyect estirnates
get larger in direct proportion to the magnitude of the random error, they are negligible for
ail three data series.

Periadic Trend (14.1) + Random Enor (&)
Periodic Trend (f=0.1) + Random Emr (s=0.66ô7)
Figure 7.1: Periodic time series of 100 equaily spaced points and period 10 (ftequency
0.1 hz) with no obsewation errors and with nonnally disaibuteci random e m (standard
deviations 1/3 and 2/3).

Nonnalized LS Spectnim - Random Enor = 0.3333 1 , l I I ! I 1 1 I l 1
Frequency (Hz)
Nomlized LS Spectnim - Random Error = 0.6667
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 Frequency (Hz)
Figure 73: Least squares spectra of time series of 100 equaiiy spaced points and period
10 (frequency 0.1) with no observation emrs and with nomaily dismbuted random emrs
(standard deviations 1/3 and Z). The horizontal line indicates the 95% confidence limit
for statisticdy signiFicant specaal peaks.

Direct ACF (Unbiased) - Random Error = O
-2 1 1 I 1 1 I 1 1 I 1 I O 10 20 30 40 50 60 70 80 90 100
Time h g
Figure 7.3: Direct estimation of unbiased autocorrelation functions of tïme series of 100
equaIly spaced points and period 10 (fiequency 0.1) with no observation mors and with
n o d y distributed mdom emrs (standard deviations ID and 2B).

Direct ACF (Biased) - Random Enor = O
t O - C, m - 2 8 O
O 10 20 30 40 50 60 70 80 90 100 Time Lag
Indirect ACF (E3iased) - Random Enor = O
O 10 20 30 40 50 60 70 80 90 100 Time Lag
x IO-'^ Indirect-Direct ACF (Biased) - Random Enor = O 6 I I t 1 I I I I 1
O 10 20 30 40 50 60 70 80 90 100 Tirne Lag
Figure 7.4: Cornparison of direct and indirect (via LS spectrum) estimation of biased
autocorrelation functions of tirne senes of 100 equally spaced points and p e n d 10
(frequency O. 1) with no observation mors.

Direct ACF (Biased) - Random Emr = 0.3333 1 I I 1 I I 1 1 1 1 L
Indirect ACF (Biased) - Random Enor = 0.3333 1 4 I ! ! I ! I I 1 1
i 1 1 I f I 1 I 1 I O 10 20 30 40 50 60 70 80 90 100
Time Lag
x lo4 Indirect-Direct ACF (Eased) - Random Error = 0.3333 OQ I I I I I I I I
-8 1 I 1 1 1 I I 1 I I 1 O 10 20 30 40 50 60 70 80 90 100
Time Lag
Figure 7.5: Cornparison of direct and i n k t (via LS spectrum) estimation of biased
autocorrelation bctions of time series of 100 equally spaced points and pend 10
(frequency 0.1) with random observation emns (standard deviation ID).

Direct ACF (Biased) - Random Error = 0.6667
1 -
O 10 20 30 40 50 60 7 0 80 90 100 Time Lag
Indirect ACF (Biased) - Randorn Enor = 0.6667
c O - C
cTI - $ O
- 1 i i i i i t i i 1
O 10 20 30 40 50 60 70 80 90 100 lime Lag
Indirect-Direct ACF (ûiaçed) - Random Error = 0.6667
O 10 20 30 40 50 60 70 80 90 100 Time Lag
Figure 7.6: Cornparison of direct and indirect (via LS spectnim) estimation of biased
autocorrelation functions of tirne series of 100 equaily spaced points and period 10
(frequency O. 1) with random observation enors (standard deviation 2B).

7.3 Effect of Correlated Random Errors
To test the effect of correlations among the random observation erras, it is
necessary to generate a comlated set of em>rs E This can be accomplished by finding a
nansfomtion L of a set of uncorrelated random errors with diagomi covariance matrix
Cq, which, by the law of propagation of ermrs, gives a set of correlated random errors E
with the desired covariance manix CE, Le., for identically nomially distributeci random
errors (C4=Z),
The above decomposition (factorization) of a manix into another ma& times the transpose
of itself is known as Cholesky decomposition, where L is a lower triangular ma& called
the Cholesky niangle or square root pahlquist and Bjorck, 1974, p. 158; Golub and Van
Loan, 1983, pp. 88; Ress et al., 1992, pp. 891. Using the Cholesky aiangle, the
t r a n s f o d set of correlated random errors can then be obtained from
In the following tests, the periodic data from the previous section is used with a
standard deviation of 2/3. A M y popdated covariance rnatrix for the observations was
constructed k m the autocorrelation fiinction
where At = 9 - ti = 1. A plot of the the series and correlation function are given in Figure
7.7 using a standard deviation of 2/3.

Three different types of least squares spectrum were cornputeci for this data series:
(1) the unweighted independent estimste, (2) the weighted independent estimate:, and (3)
the wcighted simuitaneous estimate. The different spectra a i l provide good results, each
clearly identifying the periodic component correctiy at kquency 0.1 (see Figure 7.8).
AIthough the unweighted independent LS spectrum displays slightly iarger noise at the
lower frequencies than the other spectra, the noise is weii within the 95% confidence
interval. The weighted LS specaa pvide almost identical resula, although the peak at
fiequency O. 1 is slightly larger. These resula verQ the daim by Steeves LI98 11 that
correlations among the obsmations have iittle effect on the resulting spectra.
The direct and indirect (via the unweighted inverse LS transform of the unweighted
LS spectrum) estimates of the autocorrelation function are given in Fi- 7.9. The two
ACFs are identical and agree well with the expected form for the perïodic data set (see
Figure 7.6), although those here display slightly larger correlations at lower fiquencies
duc to the a priori correlation function. The weighted indirect ACFs are shown in Figure
7.10. Both exhibit the correct shape for the periodic signal, but that based on the
independently esthateci spectnim gives larger correlations than for the unweighted
estimates. On the other hand, the ACF based on the simultaneously estimated specaum
displays much smaller correlations and thus gives the poorest estimate of the ACF.
Another check on the estimation of the autocorrelation functions was perfonned by
compu~g the ACFs only for the correlated ermrs (the periodic signal was not included).
The ACFs should agree closely with the a priori one used in C O ~ S ~ ~ U C M ~ the comlated
emrs (see bonom plot of Figure 7.7). Figure 7.1 1 shows both the direct and indirect (via
the unweighted inverse LS transfonn of the unweighted LS specmim) estimates of the
biased autocorrelation function. Both are identical and agree well with the theoreticai
correlation fùnction in Figure 7.1. The departures b r n the mie ACF are due to the
limitations of the random number generatm. The indirect weighted estimates via the
inverse weighted LS transfomi of both the independently and simultaneously estimated LS

specna are given in Figure 7.12. Ali these ACFs display the same shape, except for the
weighted simuitaneous estimate which has slightly larger currelations.
O 10 20 30 40 50 60 70 80 90 100 Time
Conelated Random Ems
O 10 20 30 40 50 60 70 80 90 100 Time
Autocorrelation Fundion of Random Errors
01 i i I i i 1 i I I O 10 20 30 40 50 60 70 80 90 100
Time Lag
Figure 7.7: Periodic time senes of 100 equally spaced points with period 10 (hquency
0.1) and correlated random observation emrs (standard deviation 2/3).

Unweighted lndependent LS Spectrum (Nomalized)
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 Frequew (Hz)
Weighted lndependent LS Spectrum (Nomalized)
Weighted Simuitaneous LS Spectrum (Nomalized)
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 Frequency (Hz)
Figure 7.8: Unweighted and weighted LS spectra (both independent and simultaneous
estimation) for periodic rime series of 100 e q d y spaced points with period 10 (fîquency
0.1) and correlated random observation emrs (standard deviation 2/3).

Direct UnweigMed ACF (Biased)
O 10 20 30 40 50 60 70 80 90 100 Time Lag
Indirect ACF (Biased) via UnweigMed Independent LSS 1 I I ! 1 ! ! I 1 I I
-1 1 i i i i 1 i 1 1 1 O 10 20 30 40 50 60 70 80 90 100
Time Lag
Figure 7.9: Direct and unweighted indirect (via unweighted inverse transform of
unweighted LS spectrum) estimates of biased autocorrelation function for periodic M i e
senes of 100 equally spaced points with period 10 (fkquency 0.1) and conelated random
observation mors (standard deviation 2D).

Indirect ACF (Biased) via Weighted Independent LSS
C 9 C m - 2 8 O
O 10 20 30 40 50 60 70 80 90 100 lime Lag
Indirect ACF (Biased) via Weighted Simuitaneous LSS
-0.5 1 i I i i i I 1 I i ! O 10 20 30 40 50 60 70 80 90 100
lime Lag
Figure 7.10: Weighted indirect estimates of biased autocorrelation function via weighted
inverse LS msform of both independent and simultaneously estimated LS spectra for
periodic time series of 100 equaily spaced points with period 10 (fkquency 0.1) and
correlated random observation emrs (standard deviation 2/3).

Direct Unweighted ACF (Biased)
-0.5 1 1 I I 1 1 1 1 I 1 I O 10 20 30 40 50 60 70 80 90 100
lime Lag
Indirect ACF (Biased) via Unweighted l ndependent LSS
Figure 7.11: Direct and unweighted indirect (via unweighted inverse transfoxm of
unweighted LS specmim) estimates of biased autocorrelation function for time series of
100 equaliy spaced points with correlateci random observation emrs only (standard

Indirect ACF (Biased) via Weig hted f ndependent LSS
lime Lag
Indirect ACF (Biased) via Weig hted Simukaneous LSS -
b
i - -- O 10 20 30 40 50 60 70 80 90 100
Time Lag
Figure 7.12: Weighted indirect estimates of biased autocorrelation function via weighted
inverse LS transfomi of both independent and simultaneously esthated LS spec~a for time
series of 100 equally spaced points with correlateci mndom observation emrs only
(standard deviation 2/3).

7.4 Effect of Random Sampling
Random observation sampling d t s in an unqually spaced data series in which
case the conventional Fourier expressions are no longer valid This is the primary reason
for using the least squares transfomi and spectrê To test the effect of random sampiing on
the LS aansform and spectm, unequdy spaced periodic data series were constructed.
Different lengths of data series were used to examine the effect of the finiteness and
sparseness of the data. The unequaüy spaced tirne arguments were created using a pseude
random number generator with a distribution (see Press et al. [1991] for an
explanation of the unifonn distribution). Thnx uaequally spaced (emrless) data sets with
a peridc trend of period 10 (fkequency 0.1 Hz) were generated with 100.60 and 20
points (see Figure 7.13).
The spectra were computed independently for integer multiples of the fundamental
frequency (0.01 h a , up a, fkquency 0.5 hz. Because the Nyquist fiequency is undefined
for randody data spacing, the spectra were wmputed only up to an arbitrarily selected
frequency of 0.5 hz. The absence of a Nyquist nequency is iilustrated in Figure 7.14a,
which gives the spectra of the data series up to maximum fi-equencies of 0.5,6 and 25 hz.
There is no evidence of a minor image in these spectra that would indicate the presence of a
possible Nyquist frequency. Also, because of the large correlations between the fiquency
components, it is not possible to estimate the simultaneous inverse LS transfm due to ill-
conditioning. This will be investigated M e r in the next section.
The spectra for the three data series are given in Figure 7.14b. The effect of
unequal samphg on the independent LS specmim is negligible. The specnal component at
fkquency O. 1 is correctly Iocared with a norrdked spectrai value of 1. The correct
location of the spectral peak is also unaffectai by the finiteness or sparseness of the data
series. Even with only 20 points the LS spectrum is practically unchanged, except foi
greater noise in the s p e m m and a larger 95% confidence leveL

The indirect (biased) esthates of the autocorre1ation function via the independent
LS specmun are given in Figure 7.15 for the three data series Zenpadding was used
prior to cornputhg the spectmm to which the inv- LS transform was applied. Ail ACFs
display the cmect shape and tapering for the periodic signal in the data series. The effect
of the random sampling is to reduce the magnitude of maximum correlation for non-zero
lags (compare top plot in Figure 7.15 with Figure 7.4). The maximum correlation is about
half of the theoretical f 1 value for all plots; i.e., the magnitude does not change as a
function of the finiteness or sparseness of the &ta. The correct shape of the theoretical
ACF is dso preserved even with ody 20 points.
For cornparison, Figure 7.16 gives direct estimates of the autown-elation functions
computed for the same unequally spaced data series using the intexval averaging method
describecl by Vaniiek and Craymer [1983a; 1983bJ and Craymer [1984]. AU ACFs display
the same periodic component as the indirect estimates (overlay Figure 7.16 with Figure
7.15). However, the direct ACF for the 100 point series clearly does not follow the
expected tapered shape (compare with Figure 7.4). Instead, the correlations at both smaU
and large time lags are significantly aaenuated, whüe correlations at the middle lags are
equal to one. It appears more like a modulateci unbiased A C The other ACFs agree weil
with both the indirect estimates; they are closer in magnitude to the theoretical ACF
(compare with Figure 7.4).

Unequally Spaced (Unifomly Distd) Series - 100 Points
Unequaliy Spaced (Unifomdy Distd) Senes - 60 Points
O 10 20 30 40 50 60 70 80 90 100 Time
Unequally Spaced (Unifonnly Distd) Series - 20 Points
O 1 O 20 30 40 50 60 70 80 90 Time
Figure 7.13: Periodic time series of different lengths of randody spaced points
(uniformly distributeci) with period 10 (£kquency 0.1) and no random observation ermrs.

Unweighted lndpendent LS Spectnim (NomaCzed) - 100 Points
O 1 2 3 4 5 6 7 Frequency (Hz)
Unweighted lndpendent LS Spectrum (Normaiïzed) - 100 Points a
O O 5 10 15 20 25
Frequency (Hz)
Figure 7.14a: LS spectra (independentiy estimated fkquency components) up to
diEerent maximum hqueencies for periodic data series of unequally spaced points with
period 10 (frequency O. 1) and no random observation mors.

Unweighted lndpendent LS Spednim (Nomalized) - 100 Points
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 F r m J e w (Hz)
Unweighted lndpendent LS Spectnim (Normalized) - 60 Points
Unweighted lndpendent LS Spectrurn (Normalized) - 20 Points 1 , I 7 n 1 1 l I I 1 I 1
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 Frequency (Hz)
Figure 7.14b: LS spectra (independently estimated frequency components) for different
lengths of periodic data series of unequdy spaced points with period 10 (fiequency 0.1)
and no random observation emrs.

Indirect ACF (Biased) via Unweighted lndependent LSS - 100 Points 1Q 1 I I 1 I I 1 1 I 1
-1 1 I I I 1 1 I 1 I I 1 O 10 20 30 40 50 60 70 80 90 100
Tirne Lag
Indirect ACF (Biasecl) via UnweigMed lndependent LSS - 60 Points 1q I ! I r 1 I 1 r 1 1
-- . O 10 20 30 40 50 60 70 80 9 0 100
Time Lag
Indirect ACF (Biased) via Unweighted lndependent LSS - 20 Points
C O - C Ca - L O O
O 10 20 30 40 50 60 70 80 90 100 Tirne Lag
Figure 7.15: Indirect estimates (via unweighted inverse LS transform of unweighted LS
spectnun) of biased autocorrelation functions for different lengdis of periodic data series of
unequally spaced points with perîod 10 (fkequency 0.1) and no random observation errors.

Direct ACF (Biased) - 1 O0 Points
Direct ACF (Biased) - 60 Points
O 10 20 30 40 50 60 70 80 90 100 Tirne Lag
Direct ACF (Biased) - 20 Points
Figure 7.16: Direct estimates (via intmal averaging) of biased autocomlation functions
for different lengths of periodic data series of unequally spaced points with period 10
(fiequency 0.1) and no random observation enors.

7.5 Effect of Frequency Selection
The effect of different selections of fiequencies for the simdtaneous LS specmmi
was dso examined. Note that frequency selection only affects the simuitmeous estirnation
of the spectral components. It has no &ect on the independently estimated LS spectxum
where each spectral component is treated out-of-context of the ohen (no correlations arise)
and any set of frequencies may be used to correctly locate the significant spectral peaks in a
data series, within the limitations of the sampling theareni (see Section 5.3). This
effectively provides a continuous specaum, although spectral leakage may &ect the resdt
The significant spectrai components can then be used in the indirect estimation of the ACF
via the simuitaneously estirnateci LS transfurm or in an improved detenrnnistic d e l .
On the other hanci, the selection of hquencies is of critical importance for the
sirnultaneously esrimateci LS s p e m In this case the correlations among the spectd
components must be carefdly considered, othawise ill-conditioning in the normal
equations for the simultaneous solution of al l specaal components can produce completely
wrong resuits. For example, consider the same data series used in the previous section
(top plot in Figure 7.13), containhg 100 unequaiiy spaced ( u n i f d y distributed) points
with a periodic trend of period 10 (fkquency 0.1 Hz) and no random errors. Using the
entire set of 50 'Fourier" frequencies in the simultaneous LS specmun, results in an ill-
conditioned solution. The resulting spectrum fails to detect the penodic trend at fiequency
0.1 hz even with no random emns present (see top plot in Figure 7.17).
The correiations among the frequencies can be reduced and the ill-mnditioning in
the spectrai transfimn removed by decreasing the fnquency sampling to only every other
kequency; i.e., 25 of the original set of 50 frequencies. Although the periodic component
is now visible in the simultaneous LS specûum, it is still relatively small and only just
statistically significant (see middle plot in Figure 7.17). This is improved M e r by iaking

every 5th fiequency so that only 10 of the original 50 fÎequencies are u s e d The spectral
peak at 0.1 is now highly signikant.
The same behaviour is aiso dispiayed by the indirect estimate of the autocorrelation
function. Note, however, that the original data series needs to be zero-padded to avoid
"wrap mund" eEects in the ACF. This doubiing of the series length results in a
fundamental hquency that is haIf of that for the original series and twice as many
muencies. This results in even more severe ill-conditionhg and a completely emneous
ACF where correlations are much m e r than 1 (see top plot in Figure 7.18). Decreasing
the hquency sampling to only 50 hquencies irnproves the ACF but there are still some
correlations greater than 1 (see middle plot of Figure 7.18). The situation is improved
when only 10 frequencies are used. The ACF has the correct cosine fom and the
umùmum correlations are oniy slightiy la~ger than 1 (they couici be truncated to 1 in
pradce).
The problem with decreasing the fkquency sampling is that some peaks rnay be
missed. Clearly, great care must be exercwd when selecting the frequencies to use with
the simultaneous estimation of the LS spectmm and the inverse LS transfom. Note that by
reducing the number of simdtaneously estimated fhquencies, one is approaching the
method of independent estimation of the spectrai components (the extrerne or limiting case
of reducing the number of frequencies).
A better approach may be to instead search for and use only statistically signincant
spectrai components h m the uidependent estimation of the LS specnum. These
fkquencies can then be used in a simultaneous estimation of the LS spectrum and in the
simultaneous inverse LS transform for the indirect ACF. The results foilowing this
procedure are illusirated in Figures 7.19 and 7.20 for a randomly sampled data series with
two periodic components (fiequencies 0.1 and 0.25 hz) and no random mors. The
independent estimation of the LS specmim correctly identifies the two periodic cornponents
as shown in Figrire 7.19. Using only these significant periodic components in the

simultaneous estimation of the spectrum and the subsequent simuitaneous inverse
aansform gives an indirect ACF that agrees with the theoretical form of the unbiased. rather
than the biased, ACF, rathm than the biased as shown in Figure 7.20. On the other hanci,
the ACF deriveci b m the inverse ~ansform of the entire independently estimiited LS
spectnun provides the expected biased fomi Am. It appears that reducing the numbn of
fkquencies in the inverse transf' gives an ACF that more closely agrees with the
unbiased estimate. The biased ACF c m be obtained by simply using n in place of the
divisor (n-k) in the expression for the unbiased ACF in eqn. (2.20).

Weighted Simuttaneous LS Spednrm (Normaiized) - 50 Frequencies a
Weighted Simîtaneous LS Spedrum (Norrnafized) - 25 Frequencies
Frequency (Hz)
Weighted Simuitaneous LS Spectnim (Normalized) - 10 F r e q ~ e ~ e s 1 , 1 1 1 I I I 1 I I i
.................................................................. ;.................-
........ : ......... : ........ i i i i i i i i i i i i i i i i i i iJJJJJJJJJJ: --.....-
........ z ......... t . . . . . . . . : . . . . . r . . . . . . . . . . . . . . . . . . . . ,
.......... ........:......... I......... II..........................-
A r* A r* A b A. - v w V w Y
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 O S Frequency (Hz)
Figure 7.17: LS spectra for different sets of sirnulüuieously estimateci fnquencies for
periodic data senes of 100 unequally spaced points with period 10 (frequency O. 1) and no
random observation mrs.

Indirect ACF (Biased) via Unweighted Sirnuttaneous LSS - 100 Frequencies
O 10 20 30 40 50 60 70 80 90 100 Time Lag
-1.5 1 l I I I 1 I 1 I I I O 10 20 30 40 50 60 70 80 90 100
Tirne Lag
Figure 7.18: Indirectly estimated LS autocorrelation hctions via the LS spectrum using
different sets of simultaneously estkmted muencies for periodic data series of 100
unequaiiy spaced points with period 10 (frequency 0.1) and no random observation mors.

Unequaliy Spaced (Ultifomly Distd) Senes - 100 Points
O 10 20 30 40 50 60 70 80 90 100 Tirne
Independent LS Spectrum (Nonnalized) - 50 Frequencies 1 I I I I 1 I I I I I
Frequency (Hz)
Figure 7.19: Penodic time senes of randorniy spaced points with frequencies 0.1 and
0.25 hz and no random observation enors (top), and independent estimation of the LS

Indirect ACF via Independent LSS - 1 00 Frequencies
O 10 20 30 40 50 60 70 80 90 100 Tirne Lag
Indirect ACF via Sirnuitanmus LSS - 2 Frequencies
I .- - -- - - - -- -
O 10 20 30 40 50 6 0 70 80 90 100 Time h g
Figure 7.20: Indirecdy estimated ACF via the inverse LS transfomi of the independent
LS specmim using all frequencies (top) and of the simultaneous LS specaum using only
the two significant spectral peaks at 0.1 and 0.25 hz (bottom).

7.6 Effect of Deterministic Mode1
The ef fm of the determinisuc mode1 on the IS specmim and indirectly estimated
autocorrelation fiinction is to absorb any spectral components that are bighly correlatai with
the deterministic model. These spectral components are usually at the Iower fkquencies,
unless some high nequency periodic trends are included in the determimstic modeL The
deterzninistic mode1 is accomnrodated by accounting for its effect within the estimation of
the LS specrmm and inverse LS transfonn foilowing the appach described in Chapters 4
and 5,
To test the effect of a deterministic linear trend model, a 100 point equally spaced
data series consisting of a quadratic trend (1 + 0.02 t + 0.00005 t2) and a periodic residual
trend of frequency 0.01 hz was generated with no random enors (see top plot in Figure
7.21). The quadratic trend will tend to alias as a long period trend which may resdt in
erroneous estimates of the spectmm of the residuais if the correlations with the quacùatic
mode1 are not accounted for. This is evident in the rniddle plot of Figure 7-21, where the
LS spectcum displays a peak at 0.02 hz while the actual periodic signal should be at 0.01
h z There is also some spectral leakage into the neighbouring frequencies at 0.01 and 0.03
hz. Accounting for the correlations with the detemllnistic model results in a spectrum that
correctly identifies the 0.01 hz peak and eluninates the specaal leakage (bottom plot in
Figure 7.21).

lndependent LS Spectrum (Nomüzed) - Quadratic Trend Residuais
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 Frequency (Hz)
lndependent LS Spectnim (Nomlized) w/ Quadratic Trend
O 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 Frequency (Hz)
Figure 7.21: Quadratic trend t h e series with penodic component (fhquency 0.01 hz)
and no random enors (top); LS spectnmi of residuals from quachtic trend mode1 (middle);
LS spectmm accounting for effects of quadratic mode1 (bottom).

7.7 Effect of Non-Stationary Random Errors (Random Walk)
Another kind of correlateci error are non-stationary random enors. One example of
this is the simple random wak mode1 where the ermr 4 at tirne ri is the accumulation of a
white noise process [Papoulis, 19651; Le.,
where the Q are norrnally distributed random variables with zero mean. One such equaiiy
spaced random walk data sexies with a unit standard deviation is dispIayed in Figure 7.22
(top plot). This 100 point data series is actualiy a evenly sampled subset (every fifth point)
of a much larger 500 point random walk data series using a white noise process with unit
standard deviation. The theoretical spectnim for such a process is hversely proportional to
the square of the fkequency [Zhang et al., 1997. The computed LS spectrum is given in
the middle and bottom plots of Figure 7.22. The bottom plot uses a log scale for both axes
and exhibits a linear aend with a slope of about -2 correspondhg to the expectedf2
relation for a random walk rnodel. The direct and indirect autocorrelation functions are
aven in Figure 7.23. The indirect estimate via the LS spectnim (zero-padding is used)
agrees well with the direct estirnate. The differences between them shown in the bottom
plot of Figure 7.23 increase in direct proportion to the hg. The indirect ACF departs fimm
the direct ACF to about 0.5 at the highest lag.
To test the effect of the data sampling, an unevenly spaced mndom wak data series
was generated by randornly sampling the same 500 point random waik series used above
(see Figure 7.24). (A uniform random number genemor was again used to generate the
random selection of 100 points; see Section 7.4.) The LS spectruxn is given in the bomm
two plots. The effect of the random samphg is to 5tten out the specmun at the higher

mencies. The inverse square frequency relation only h01ds at the lower hquencies.
This behaviour was ais0 found by Zhang et al. [1997J. The indirect estimate of the
autocmlation function via the independent LS spectrum (with zempanriing) is also
si@cantly affected by the random samphg (see Figure 7.25). It now drops off much
more rapidly in cornparison to the direct estirnate in Figure 7.23).

Randorn Walk (Equaliy Spaced Times) - 1 0 Points 2 r 1 l I I I k I I
Independent LS Spectnirn (Normalized) - Random Walk
Frequency (Hz)
. . . . . - - . . . . S .
. . Y . . . . . . . .
Independent LS Spectrum (Norrnalized) - Randorn Walk
Log Frequency (Hz)
Figure 7.22: Evenly sampled 100 point random walk time series (standard deviation 1)
(top) and its corresponding LS specmm.

Direct ACF (Bi- - Random Walk
O 50 100 150 200 250 300 350 400 450 TÏme Lag
I&red ACF (Biased) via LS Spectrum - Random WaJk
Indirect-Direct ACF (Biased) - Random Walk 1 , I I I I I r I I I 1
O 50 100 150 200 250 300 350 400 450 Time Lag
Figure 7.23: Direct (top) and indirect (bottom) autocomlahon functions for 100 point
random walk data series.

Randam Walk (Unequally, Uniformfy Sampled Times) - 100 Points 2 , I I I I I I I 1 I I
lndependent LS Spectnirn (Normalized) - Random Walk
O 0.01 0.02 0.03 0.04 0-05 0.06 0.07 0.08 0.09 Frequency (Hz)
independent LS Spectmm (Nonnalized) - Randorn Walk .................................................. ........................... * . . . - . + . . - . . S . . * . * ........................................ -*..-*-...--...-~.--.-.-*.------..-- ....*...-.-.*.*.-. .............................................................................................. ......... .... r r ~ . . . - . * i . r r * . . r % r r b - i S - a r . I - r . t - - - r - - - - - a . . a... . . - 8 ...... .......... b . - . % . . b . - ~ . ....... ..........................................-.....--.......................... * * * . * * . . * * -
1 O-* Log Frequency (Hz)
Figure 724: Unevedy sampled 100 point random walk time series (top) and ia
corresponding LS spectrum.

Figure 7.25: Indirect estimate of autocomlation Ma the independentiy estimated LS
specsum for the uneveniy sampled 100 point random walk time series.

Chapter 8 Some Applications in Geodesy
8.1 Introduction
There have ken many applications of time series analysis in geodesy to the saidy
of tide gauge data, gravity data and geodynamics. In particular, the method of least squares
spectral analysis has been applied to studies of the Earth-pole wobble by Vanilek [1969b]
and Rochester et al. [1974]. However, there have been few applications of time series
anaiysis techniques to other h d s of geodetic data. The few studies employing these
techniques have been mostiy applied to levebg data (see, e.g., VanîEek and Craymer
[1983a, 1983b], Craymer [1984]. Vaniiek et al. [1985], Craymer [1985], Craymer and
VaniZek [1985, 1986,19901). More recently timc series analysis techniques have also
k e n applied to electronic distance measurement (EDM) data by Langbein et al. [1990] and
Langbein and Johnson [1997], and to Global Positioning S ystem (GPS) data by El-
Rabbany [1994], King et al. [1995] and Zhang et al. [lggq. In El-Rabbany [1994], only
standard Foinier (and FFT) methods in the equally spaced Mie dimension are considered.
The study by King et al. [1995] also assumed equally spaced time arguments. Only the
ment work of Langbein and Johnson [1997] and Zhang et al. [1997 have considered
unequally spaced dam in particuiar, Zhang et ai. [1997] have used the periodogram as
dehed by Scargle [1982], which can be shown to be a special case of Vmik ' s original
method (see Section 5.7). Estimation of covariance and correlation functions for stochastic
modelling of e m , however, was still based on traditional methods assuming equally
spaced data.

The sndies by Craymer et aL have applied time series techiques more generally to
arguments that are not necessarily equalîy spaccd in order to search for systematic e m ~ s
that depend on these quantities. Ail these studies have used the unweighted f m of the
independently estimated least squares spectrum to search for systematic errors in precise
levelling. Here, the weighted fonn of the least squares approach to specûum and
autocovariance function estimation are applied to the stochastic modehg of errors using
two mal examples: estimation of the defonnation of an EDM basehe across the San
Andreas fault using the same data as in Langbein and Johnson [1997J, and GPS single
point positioning using pseudo-range observations (the typical positioning data used by
most handheld GPS receivers).
8.2 EDM Deformation Measurements
Electronic distance measurements @DM') is the most precise distance measuring
technique at close to moderate ranges (about 1 km). The most accurate EDM instruments,
such as the Kem ME5000, cm routinely obtain submillimeter repeatability. The most
accurate EDM insrrument is based on dual kequency ("two-colour") lasers (see Slater and
Huggea [197q). The two measuring muencies d o w one to more directly detemine and
correct for the refraction effect (which is a function of the frequency of the laser). For this
reason, two-colour EDM insrruments are often used in southern California by Earth
Scientists to monitor the cnistal deformation mund the San Andreas fault (see. e-g.,
Savage and Lisowski [1995]).
Here the least squares specaal analysis technique is applied to the same data used
by Langbein and Johnson [1997] to search for possible systematic signals in their two-
colour EDM data. Traditional spectral techniques were used by Langbein and Johnson for
this purpose. Because the observations are at irregular time intervals, some necessary
approximations, specificaliy interpolation, had to be made to estimate their spectm. No

such approximations are needed for the least squares technique which is an ideal application
of this metfiod.
The &ta used in this analysis are part of the Pearblossom network. near Palmdale
in southern Cal i fha and were provideci by J. Langbein (personal communication, 21
February 1997) of the U.S. Geological Siirvey, Menlo Park, CA. The network is fadial in
design. whae aii distances (baseLines) are measured h m Holcomb to twelve smunding
monuments at distances h m 3 to 8 lan (see Figure 8.1). Ody the Holcomb-Lepage
baseline with a nominal distance of 6130 m was used in this andysis. Initially the baseline
measurements at Pearblossom were made s e v d times per week for 4 years (1980- 1984).
Since about 1987 they have been reduced to about once every 3 or 4 months, although each
baseline is measined twice during each network re-observation. In addition, different
instruments and monuments have been used over the years and thae have k e n a number
of earthquakes. Consequently, the data have been reduced to changes in basehe length
h m the nominai value and grouped into sets sharing common EDM instrumentation and
monuments between earthquakes. The time series of the Lepage baseline measmrnents is
given in Figure 8.2. Note the different offsets between each data group and the consistent
linear trend (expansion of the basehe) for a i l groups. The different danim offsets
represent biases in the measured differences due to the different instnment/monument
combinations or the occurrence of earthquakes. It was also noted that several observations
were repeated within a couple of hours of each other (two within 15 minutes!). To avoid
excessively large temporal correlations under these circumstances. only the second ( r e p t )
observations were used.
The *nt biases between measurement groups necessitate accounting for a
sepmate danim offset for each. Likewise, the consistent trend for aU groups necessitates
m o d e b g a common linear trend for a i l groups. Least squares estimates of these model
parametexs are given in Table 8.1, where the datum offsets are all refaenced to the b t
measurement epoch. The 1.72 i 0.07 mm&ear linea. trend (extension of the baseline)

Pearblossom network
F i 8.1: Location of the Pearblossom network in California used to rneasure crustai
deformation with a two-colour EDM instnunent and location of the Holcomb-Lepage
baseline spanning the San Andreas fault ninning through this network [after Langbein and
Johnson, 1997, Figure 11.
Holcomb-Lepage Baseline Length Changes 10, 1 I 1 I 1 I i l w h t
1 1 I I 1 1 1 I I 1980 1982 1984 1986 1988 1990 1992 1994 1996 1998
Tirne (days)
Figure 8.2: Changes in length of Holcomb-Lepage baseline. Dinerent observation
groups are denoted by different symbol colowftype combinations.

Table 8.1: Least squares estimates of linear trend and d a m
offsets.
Estimate Std t Statistic
Offset #1 (mm) -2.3 O. 1 22.4
Offset #2 (mm) -3.2 0.2 17.0
Offset #3 (mm) -4.2 0.2 17.5
Offset #4 (mm) -4.8 0.5 9 .5
Offset #5 (mm) -15.4 0.4 35.0
Offset #6 (mm) -20.1 0.7 27.6
Offset #7 (mm) -7.1 0.4 20.3
offset #8 (mm) -10.5 0.5 19.5
Linear Trend (mm&) 1.72 0.05 34.4
agrees well with the 1.67 value determineci by Langbein and Johnson [1997]. In the l e s t
squares solution, the data were weighted using standard deviations provided by J.
Langbein (personal communication, 2 1 February 1997). AU estirnateci mode1 parameters
were statistically signifcant at any masonable significance level and were removed h m the
data leaving the residual series in Figure 8.3. It is this data mies that is used in the
following spectral analysis.
Before performing a spectral analy sis, appropriate frequencies (i.e., frequency
spacing and range) must be chosen. The total length of the data senes defines the smallest
frwluency spacing that cm be resolved without spectral "leakage" f h n adjacent peaks.
The freguency interval (4 is def'ined by

I I I I I 1 I I I 1980 1982 1984 1986 1988 1990 1992 1994 1996 1998
Tirne (days)
Figure 83: Cornparison of residual baseline length changes after removal of estimated
distance offsets for each observation group and a common linear trend- Different
observation groups are denoted by different symbol colou~Itype combinations.
where T, = (?-min) is the fùndamental period andf, is the fundamental frequency (see
Section 3 .2 eqn. (3.17)). The largest frequency that can be detennined by the data series
is defined by the Nyquist frequency f ~ - It corresponds to the time interval over a triplet of
adjacent points, the minimum number of points for the unambiguous determination of a
periodic component
The Nyquist fkquency is not clearly defïned for unevenly spaced data. For evenly
spaced data, it is simply twice the time interval between any pair of adjacent points (Le.,
twice the sampling interval t). The Nyquist freq~ency is then defined as f~ = 2 /(2 t)
(cf. Section 3.2). This represents the largest fkquency (smdest period) the data series is
capable of reliably estimaihg without aliasing effects. For unevenly spaced data series, the
distribution of possible triplets of points can Vary si-cantly and thus there is no weU
d e f i Nyquist frequency present. In theory, the highest frequency (that can be estima&
h m a data series) will correspond to the srnaIlest point triplet interval. This intemil
corresponds to the srnailest pend (maximum fkquency) that can possibly be determined

£tom the data series. However, in practice, the specaa generally exhibit no mirror image
about this or any other frequency when the data are unevenly and r a n d d y spacd. The
exception is when deaüng with data that are reguiarly spaced as multip1es of some conmion
interval or evenly spaced except for gaps.
For the baseiine length residuais in Figure 8.3, the variation in possible Nyquist
frequencies is illustrami in Figure 8.4 in temis of histograms of the lengths (time intrrvds)
of all possible point triplets ("Nyquist periods")). The srnaIIest mplet interval is about 1 day
corresponding to a Nyquist frequency of 1 cylday. This is because the measurements were
collecteci on a regu1a.r daily basis in the beginning. In the following analyses, spectra are
therefore estimated at integer multiples of the fundamental fkquency up to a Nyquist
fiequency of 1 cy/day.
Histogram of Possible Nyquist Periods 40 I I I I I I I I I 1
O 2 4 6 8 1 O 12 14 16 18 20 Period of Point Triplets (days)
Histogram of Possible Nyquist Penods I 1 I I
O 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 Period of Point Triplets (days)
Figure 8.4: Histograms of lengths of point mplets ("Nyquist periods") corresponding to
possible Nyquist muencies. Bottom plot gives a more detailed histogram at 1 day.

in the estimation of the weighted Ieast squares specaimi of the baseline lengrh
residuals, any linear dependence (mathematical correlation) with the estimateci detenninistic
mode1 (distances offsets and linear trend) are taken into account as described in Sections
4.5 and 5.5. The specmrm is plotteci in Figure 8.5 with respect to period instead of
frequency for d e r interpretation There are clear significant spectral components at
periods of 2 and 8 years, in addition to several peaks at perîods shorter than a year. The
lower plot in Figure 8.5 enlarges the short period range and shows significant spectrai
components at periods of about 1,100,150 and 200 days.
2 4 6 8 10 12 14 16 Period (years)
Weighted LS Spectrum of Residuals 1 I I I
.... : ......... : ................... : .......,
.... ;..................,.................,
....................... I.................,
y- -fl t
O 50 100 150 200 250 300 350 400 450 500 Period (days)
Figure 8.5 Weighted l e s t squares spectra (independently estimated) of baseline length
residuals h m the deterministic mdel in Table 8.1. The horizontal iine is the 95%
confidence interval for detecoing signincant spectral values.

The 8 year pexiod is interes~g because it is &O visible in the residuals between
about 1984 and 1996 (see Figure 8.3). It was thought that this might be due to a possible
additional datum offset at about 1988.7 in the data group between 1984.2 and 1992.5 (see
figure 8.2). Apparently, the instrumentation had been taken down and set up again at this
Mie but it was thought that this was done accurately so as not to produce any additional
bias in the distance measurements (J. Langbein, personal communication, 2 1 Mar& 1997).
To check for the significance of such a b i s , an additionai d a m offset was estimated at
l988.7. This resulted in replacing the 1984.2- l99Z.S group (with d a m offset #5) with
two oew groups; l984.2- 1988.7 with dahm offset #5 and 1988.7- 1992.5 with new datum
offset #5a Figure 8.6 shows these two new groups together with the time series of length
changes. The les t squares estimates of the mode1 with the additional offset (##a) are given
in Table 8.2 and the residual series after removing the mode1 is given in Figure 8.7. It was
found that the datum offsets #k5 and #a for the two new groups were statisticaily different
from each other at any reasonable significance level (t statistic = 7.0) and both biases were
therefore modelied in the foilowing analyses.
Holcomb-Lepage Basdine Length Changes 10, I I I 1 I I I 1 A l
Figure 8.6: Changes in length of Holcomb to Lepage basehe with additional d a m
offset in observation group from 1984 to mid-1992. Different observation groups are
indicated by different symbol colour/type combinations.

Table 8.2: Least squares estimates of Linear trend and datum
offsets, including additional datum offset (##a).
Estimate Std t Statistic
Offset #l (mm) -2-0 O. 1 19.3
Offset #2 (mm) -2.8 0.2 15.1
Offset #3 (mm) -3.6 0.2 15.5
Off't #4 (~nm) -4.2 0.5 8.7
Offset #5 (mm) -15.3 0.4 36-9
Offset H a (mm) -12.6 0.6 21.9
ûfF~et #6 (IMI) - 17.1 0.8 21.3
offset #7 (m~n) -6.2 0.4 17.4
offset #8 (mm) -9 -2 0.5 17 .O
Linear Trend (mmlyr) 1.51 0.06 26.9
Baseline Length Residuais (Weighted Sotn) 4 r 1 1 I I I I 1
Figure 8.7: Cornparison of residual baseline length changes after removd of estimateci
datum offsets, including additional offset, for each observation group and a common linear
trend for a i i groups. Different observation groups are denoted by different symbol
colodtype corn binations.

The weighted lest squares specmim for the rsiduals after removing the estimsted
detemnaistic mode1 with the additional damm offset is given in Figure 8.8. The most
obvious difference fiom the previous specmmi is that the peak at 8 years has now been
signincantly reduced by the introduction of the additional d a m offset in the model.
However, there still remains a large peak at about 1000 days (2.5 years) that accounts for
15% of the noise in the residual data series. One possible explanation for such an
interannual behaviour may be an El Nino wamiing efkct, wbich has hquencies of
between 2 and 4 years during tbïs time p a i o d The warming effect is generally
Weighted LS Spectrum of Residuals
O 2 4 6 8 10 12 14 16 Pe riod (years)
Figure 8.8 Weighted least squares spectra of basehe length residuals from the
detenninistic model with adnitional distance offset- The horizontal line is the 95%
confidence interval for d e t e c ~ g significant specfral values.

accompanied by more muen t and severe wet weather which couid cause monument
motion due to higher levels of ground water. In addition, the "piling up" of warmer waters
in the eastern Pacific could also possibly led to additional crusta1 loading on the westeni
seaboard of North America, The o h significant peaks are at short @ods and are more
clearly identifieci in the Iowa plot of Figure 8.8. The largest peaks in this fiequency range
a~ at about 150 and 210 days. Ciniously, these peaks are symmetrical (Hl days) about
small central peak widi a semi-annuai period (180 days). According to Vaniek [1969b],
this conesponds to a possible modulation of a semi-annual perïod by a 30 day period. The
semi-annual period may be related to weather. For example. it is well knom that southem
California generally has wet spring and fall and a dry summer and winter which could
conceivably cause a semi-annual period in the presence of gruund water, thus possibly
conaibuting to a semi-annual behaviour of the motions of the geodetic monuments. The 30
day p e n d may be related to lunar tidal effects. Other peaks evident in the spectrum are at
penod of about 110 days and 1 day. The diumal period is believed to be a consequence of
the usual diunial behaviour of many systematic effects related to atmospheric conditions,
such as atmospheric refraction and heating (expansion) of the ground and monuments. The
other notable feature of the s p e c m is the absence of an annuai period. In fact, the
spectral value for this pexiod is almost exactly zero, indicating that such a period had
already been removed h m the data. This was denied by Langbein (personal
communication, 2 1 March 2 997), however.
Langbein and Johnson [1997] also argue for the presence of a random wak signal
in the residual data series. Their specmim for the Holwmb-Lepage baseline was cornputeci
by first interpolaring the unevedy spaced measurement series to an evenly spaced one by
averaging the data spanning 15-35 days either side of the missing point White noise was
also added to their interpolateci value. The power s p e c m was then mmputed using the
FFT technique and plotted against the log of the frequency (see Langbein and Johnson
[1997, Figure 31). Their plots display a clear trend proportionai to 1/f2 as expecrad for a

Weighted LS Spectnim of Residuals 0 -2 . . . . , , , . . . . m . , 1 I ...
Weighted LS Spectnim of Residuais 1 oO I i I I
Figure 8.9 Semi-log (top) and log (bottom) plots of weighted least squares spectra of
basehe length residuals h m the detenninistic mode1 with additional datum offset. The
straight line represents a 4.60 linear trend at low frequencies (fc4x10-2).
random walk process (see Section 7.7). For cornparison, the weighted least squares
spectra is displayed in Figure 8.9 (top plot) using the same semi-log fkquency plor No
clear l/f* trend is apparent in this spectrum. The specmirn is also displayed in Figure 8.9
(bottom plot) using a fuii log plot, where the presence of random walk noise should
produce a negative hear mnd at low fi=equencies, as discussed in Section 7.7. A srnail
negative trend (-0.60 f 0.08) is visible in the Ieast squares spectnun at muencies below 4

x IO-* cy/day, which grows even smaller for higher frequencies. Howeva, this linear
trend is pmp0rtiona.I to l/fl-6, rather than 1 ~ 2 as characteristic of a random waik process.
The autocomlation fûnction for the observations was indirectly estimateâ nOm the
inverse Ieast squares transfomi of the independently estimateci, weighted least squares
spectrum following the iterative procedure outiined in Section 6.4. The a priori standard
deviations of the dam were used to generate a pria5 observation weights.. nie data series
was also zem-padded prior to computing the specûum to avoid any wrap around effects in
the autocorreIation function as described in Section 3.4. The main difliculty encountered
was with the large number of possible time lags for which the a u ~ m l a t i o n needed to be
computed. For uneveniy and randody spaced data, th= are in general as many different
lags as there are combinations of observation pairs. For the Holcomb-Lepage distance
measurements, there are 361 observations for which there are 65,341 unique possible time
lags (number of off-diagonal elements in the observation covariance matrix). It was
therefore impractical to compute the autocorrelation function for all lags at once. instead,
the ACF was computed separately for the lags corresponding to each row of the
observation covariance matrix. Oniy the autocorrelations for the upper triangular part of
each row needed to be computed. The entire correlation ma& R for the observations was
assembled in this way and the N1 covariance rnatrix C was obtained using the a prion
standard deviations of the observations (which were also used in the computation of the
weighted spectmm); i.e.,
C = S R S ,
where S is a diagonal matrix of the a priori standard deviations. The autocorrelation
function for is ploaed in Figure 8.10 together with an enlargement at short lags. Although
there is a periodic behaviour in the enlarged plot, the magnitude of the corre1ations are small
even for short lags. No explanarion was found for smaU correlation "spikes".

Autocorrelation Function
Figure 8.10: Indirect ACF, and enlargement at short lags, estimated from zero-padded
time senes of Holcomb-Lepage length changes with additional dam offset.
The detenninistic mode1 of the damm offsets and linear trend were re-solved using
the new full covariance matrix. The solution is given in Table 8.3 with the additional
datum offset (Ha) at 1988.7 included. Because of the smaU codations, there is little
difference in the estimated offsets and trend berneen this solution and that based on only a
diagonal covariance matrix (Table 8.2); ail are statisticaüy compatible. However, in most
cases the estimated standard deviations of the offsets and trend are larger when the full
covariance matrix is used, indicating greater uncertainty in the estimated parameters.

Table 8.3: h t squares estimates of linear trend and d a m
ofEseu, including additional offset (##a) and using estimated fidl
observation covariance matRx based on computed ACF.
Estimae Std t Sraastic
Offiet #1 O LI^) -1.7 0.2 7.8
offset #2 (mm) -3.6 0.2 16.2
Offset #3 (mm) -4.6 0.2 20.8
Off't #4 (III.~) -4.1 1.0 3.9
Offset #5 (mm) - 14.0 0.3 51.3
offset #a (mm) -11.9 1 .O 12.3
Offset #6 (mm) - 16.2 1.3 12.4
Offset #7 (mm) -5.8 0.6 9.3
offset #8 (mm) -8.9 1.2 7.4
Linear Trend (mm/yr) 1.44 0.09 16.3
Specifically, the standard deviation for the linear trend is increased h m 0.06 to 0.09
d y r . This is thought to be caused by a slight reduction in the overall redundancy due to
the linear dependence (mathematical corrdations) among the obsewations. There were also
some significant differences in the correlations between the estimated parameters. For
example, the codation between offsets #5 and #5a was reduced from 0.75 to 0.44. This
caused the difference between the two offsets to becorne Iess statisticaily significant (t
statistic reduced h m 7.0 to 2.4). Nevertheless, the difference is sall statisticaiiy
significant at the 95% confidence level, leading us to still consider the possibility that the
addition daturn offset is reai.

Table 8.4: Summary of estirnated linear trends with and without
extra offset and correIations.
Linear Trend k Standard Deviation
Without Corr. With Con-.
Without extra offset 1.72 k 0.05 1.61 k 0.07
1.67 m g b e i n & Johnson]
With extra offset 1.51 f 0.06 1.44 f 0-09
Fioaly, the estimateci hear trends (baseline expansion) are sunnnaiized in Table
8.4. The main ciifference with the estimate h m Langbein and Johnson [19m is due to
the use of the snnitional danun offset Ma. When the offset is not used, the estimiited trend
with or without the observation correlations is not signincantly different h m Langbein and
Johnson's. The Merences are weil within the 95% confidence intervals. When the extra
offset is used, the linear trends are reduced by about 0.2 mm/y with or without the use of
cmelations. These are sisnificantly different at the 95% confidence level The standard
deviation of the iinear trend is only slightiy increased by the additional offset
The use of observation correlations derived h m the esthateci autocorrelation
fùnction dso reduces the magnitude of the hear trends both with and without the extra
offset. However, the reduction is only about 0.1 in both cases and is not
statistically signincant at the 9596 conMence level. The correlations also increase! the
estimated formal standard deviations of the linear trends by about 5046, even though the
magnitude of the autocorrelation is relatively small. This increase is thought to be due to a
implied reduction in the total redundancy (the existence of wrrelations means the= are
effectively fewa truly independent observations).
Finally, it is noted that the estirriiited linear trend (1.44 f 0.09 mm&) with the extra
offset and correlations agrees beaer with the linear trend (1.46 mm/yr) estimated by

Langbein and Johnson for the basehe from station Holcumb to station Bird, which is in
the same generai vicinity and direction as station Lepage (see Figure 8.1). The baselines to
these two station shouid thedore behave similar1y in t e m of its motion relative to
Holwmb. The apparent agreement therefore suppom the existence of an extra d a m
offset in the measurements m Lepage.
8.3 GPS Point Positioning
The use of the Global Position S ystem (GPS) has grown greatly in recent years,
largely owing to the wide availability of d, low cost receivers. For an in depth
expianation of the concepts involved in GPS, see Wells et al. [198Q or Dana [1997]. In its
most basic mode of operation, referred to as the Standard Position Service, users can
obtain their position to an accuracy of only about 100 metres horizontally and about 150
metres venically. in this mode, GPS receivers make use of the secalled U A code pseudo-
range (measured satellite-to-receiver distance), which is obtained by timing the satellite-to-
receiver travel t h e of the basic U A (coarse acquisition) code that is superimposed on the
L1 carrier frequency. The satellite-to-receiver ranges are used to solve for the receiver's
position in what is essentially known as a 3-dimensional resection problem in siateying.
This mode of positioning is called "point positioning" to distinguish it b m other, more
accurate, methods based on relative or differentiai positioning between receiven.
Although the pseudo-range observable is capable of providing point positioning
accuracies of about 10 to 30 meaes, the US Depanment of Defense intentionaüy degrades
the observable to the 100 m level for seclaity reasons. This degradation is cded Selective
Availability (S/A) and involves the introduction of systematic enas in the fom of a
mathematical aigorithm (caUed cc~thering") into the hadcast satellite ephemais and clock.
To date only clock dithering has apparently k e n applied. This error propagates dVectly
into the signal travel time from which the pseudo-range observable is de-rived. However,

because the S/A error is fairiy systematic, there exist very large autocorrelations in the
pseudo-range data and thus also in the estimated positions derived h m them Hem, only
the vertical position is examined with the aim of investigating the degree of autocorrelation
in the &ta and the effect of using the autocdation fwiction to weight the point positions
when using tirne averaging to reduce the effects of S/A and improve the accuracy. The
malysis of the two horizontal componenu can be done in an analogous fashion.
The data used in this study were provided by W. Rescott of the US Geological
Siwey @asonal communication, 19 May 1994). They were obtained h m a geodetic
quality Ashtech L-XII GPS receiver and uicluded, for each masurement epoch, the receive
time, computed WGS-84 Cartesian coordinates of the receiver's antenna and computed
receiver clock b i s . The tirne series of instantaneous point positions refers to station
Chabot in the south part of Oakland, Ciùifoxnia. The point positions were recmded every
30 seconds for a total of 24 hours on April6, 1994. Plots of the variation in the horizontal
and vertical position estimates over this 24 hour period are given in Figure 8.1 1, and for
only the first hour in Figure 8.12. The high degree of autocomlation at short time intervais
is rcadily apparent h m the very systematic way in which the positions slowly Vary.
As already stated, the most cornmon method of reducing the effects of S/A is to
average the point positions over time. Generally, users average their positions over
intervals as short as 5 minutes and at most about an hour. Here, one hour averaging is
used to examine the effectiveness of this in reducing the effects of SIA. This provides for
24 independent hourly means.
For each hou, the least squares spectrum is computed. Any linear dependence
between the estimated mean and the specaal components is accounted for as describeci in
Section 5.5. The hour long subsets are also zero-padded to avoid any wrap around effects
in the derived autocomlation functions (see Section 3.4). The systematic nature of S/A is
revealed as statistically signifiant peaks in the spectra, mainly at lower frequencies. The
independently estimated least squares specaum for first hour of the height series is given in

Van'ation in Horizontal GPS Positions about Mean I
I I
-50 O 50 Change in East (m)
Variation in Vertical GPS Positions about Mean
O 5 1 O 15 20 25 Tirne (hr)
Figure 8.11: Variations in derived horizontal (top) and vertical (bottom) GPS positions
over 24 hours at station Chabot. Variation is with respect to mean position.

Variation in Horizontal GPS Positions about 24 hr Mean (Hour 1)
Variation in Vertical GPS Positions about 24 hr Mean (Hour 1)
1 O 20 30 40 50 60 Time (min)
Figure 8.12: Variations in recorded horizontal (top) and vertical (bottom) GPS positions
for the fim hou. at station Chabot Variations are with respect to 24 hour mean position.

Figrrre 8.13, where the SIA effects are ckarly evident. The peak around O. 1 c y / d (period
= 10 min) is typical also of the other hourly data sets. The spectra are sufficiently dinerent
h m hour to hour, however, so that it is not possibie to predict the S/A algorithm with ody
one hour of data.
The inverse least squares transform of the zero-padded spectrum was used to obtain
the (biased) autocorrelation function (ACF) for each hour. The biased estimate of the ACF
for the first horn is given Figure 8.14. There are smng, periodic corre1ations present
which are typical &O of the other hourly subsets. For each hourly subset the estimated
autocomlation function is used to populate a fidl wrrelation rnah fm the observations.
These are then used as the a priori weight matrix in the re-estimation of the hourly means;
referred to here as the "weighted" rneans. Note, however, that the ACF used in the
weighted mean was computed by k t removing the unweighted mean (using the identity
matrix for the a priori weight matrix). Consequently, the weighted mean was re-estimateci
by iterating the computation of the ACF using the weighted mean h m the previous
iteration as describeci in Section 6.4 and illustrated in Figure 6.1. The standard deviations
of the means were also scaled by the square mot of the estirnated variance factor of the
height residuais h m each hourly mean solution.
The un weigh ted means (equail y weighted observations with no comlations) and
weighted means (with comlations b a s d on the estirnated ACF) were obtained in the above
manner for each hourly subset of data. The results are s b z e d in Table 8.5 and plotted
in Figure 8.15. It is evident from these resuits that there is a systernatic vanation in the
hourly means. The average of the formal standard deviations is only about 4 rn whereas
the RMS of the hourly means is about 13 a This clearly indicates that the foxmal standard
deviations of the estirnated means are too optimistic. The use of observation correlations
derived h m the ACFs estimated fhm each hour of data does not -ove the results. The
average formai standard deviation is stU much smaller than the RMS.

Least Squares Spectrum w/ Zero-Padding (Hour 1)
Figure 8.13: Independently estirnated lem squares spectrum of GPS height
measurements for the first hour (data zen>-padded).
Biased Autocorrelation Function (Hour 1 ) I I I I 1 1
-0.5 I I I 1 I l O 1 O 20 30 40 50 60
Time Lag (min)
Figure 8.14: Indirect estimate of the biased autocorrelation function via the inverse least
squares transfm of the least squares spectnim for the first hour.

Table 8.5: Unweighted and weighted hourly means and their sondard deviations (Std) of
GPS height m«isurements over a 24 hour period. "A~erage"~ 'Xange" and "RMS" denote
the arithrnetic average (unweighted). range (max - min) and roo< mean square (about the
"Average"), respectively, of these hourly values and are provide for ülusaation only. - -
Unweighted Weighted Mean Std Mean Std
Hour 1
Hour 2 Hour 3 Hour 4
Hour 5 Hom 6
Hour 7
Hour 8 Hour 9
Hour 10
Hom I l Hour 12 Hour 13
Hour 14
Hour 15
Hour 16 H o u 17
Hour 18
Hour 19
Hour 20 Hour 21
Hour 22 Hour 23 Hour 24 - .-- - 244.776 - - - 241.927 9.138
Average 225.173 4.186 226,861 5.152
Range 47.519 3.874 52.466 8.455 RMS 12.576 13.691

1801 1 t I r 1 O 5 1 O 15 20 25
Hour
Unweighted Means
Figure 8.15: Unweighted (top) and weighted (bottom) hourly means of GPS height
280
g-260 Y
9 2 4 0 - H r 220 s = 200
180
measurements over a 24 hour period The ACF-weighted means are based on iterative
1 I I 1
- - - -
- -
- -
I I I 1
estimation of the ACF. Enor bars represent 95% confidence intervals.
O 5 10 15 20 25 Hour

h m these results it is clear that the one hour averaging does not eIiminate di the
effects of S/A. To gain a better understanding of the nature of S/A for this data set, the
least squares specaum was computed for the entire 24 hour data ser The specmun is
plotted in Figure 8.16 and the largest peaks are tabulated in Table 8.6. It is clear from these
results that there are many significant periodic components at periods longer than one hour.
in fact, the largest peak has a pend of about 1.5 hrs. There is also a peak at 24 hrs. which
is the fwidamental period of the &ta Senes. This wuld indicate a 24 hour mod (possibly
diunial atmospheric effects) or spectrai leakage h m periodic components beyond 24
hours. Without a longer data sexies, it is not possible to distinguish between these two
possibilities. Regafdless, it is evident that the hourly means are not capable of "averaghg
out" all of the systematic effects. Longer averaging is clearly needed
The hourly means were recomputed using the autoc0rreIation funaion h m the
entire 24 hour data set The autocorrelation function is plotted in Figure 8.17 and the new
weighted hourly means tabulated in Table 8.7 and plotted in Figure 8.18. The lower plot in
Figure 8.18 shows the Merences between these means and the unweighted ones. All
ciifferences are within the 95% confidence interval. Although the esrirnated means stili
exhibit the same systematic trend as for the unweighted ones, the foxmai standard
deviations are much larger. The average of these fornial standard deviations (12 m) is very
nearly the same as the RMS of the means (13 m). This indicates that the foxmal standard
deviations are now much more redistic, accounting for the uncertainty due to the systematic
effects still present in the resulrs.
As stated in the previous section, this increase in the formal standard deviations is
thought to be caused by a reduction in the o v d redundancy due to correlations m n g the
individual position estimates. The observations can no longer be considerd independent
of each other. The degrees of fieedom is thus somewhat less than the number of
observations minus the number of unknowns. The larger standard deviations represent a

Least Squares Spedrum
O 500 1000 Period (min)
Least Squares Spednim
O Period (min)
Figure 8.16: Least squares spectnim (independently estimated) for entire 24 hour data
set. The lower plot is an enlargement of the short period range. The horizontal line is the
95% confidence interval for d e t e c ~ g significant spectral values.

Table 8.6: Twenty of the largest peaks in Ieast squares spectnim in Figure 8.16.
Period (min) Specb.al Value
84.7 0.046
62.6 0.020
160.0 0.0 16
27.7 0.016
12.3 0.0 16 1440.0 0.016
41.1 0.015
36.0 0.0 14 72.0 0.0 13 16.0 0.0 13
13.7 0.0 13
32.0 0.01 1
15.2 0.01 f
144.0 0.01 1
19.2 0.0 1 1
22.9 0.01 1
25.3 0.01 1
17.3 0.01 1 16.2 0.0 1 1
28.8 0.0 10
Biased Autocorrelation Function (24 hrs) 1 I I
500 1 O00 rime Lag (dn)
Figure 8.17: Autocorrelation function for entire 24 hour data set

Table 8.7: Weighted hoinly means of GPS height measurernents and rheir standard
deviations (Std) over a 24 hour period using comlations from ACF base- on 24 hours of
data "Average", "Range" and "RMS" denote the arithmetic average (unweighted), range
(max - min) and root mean square (about the "Average"), respectively, of these hourly
values and are provide for illustration only.
Hour 1 Hour 2 Hour 3 Hour 4 Hour 5 Hour 6 Hour 7 Hour 8 Hour 9 Hour 10 Hour 11 Hour 12 Hour 13 Hour 14 Hour 15 Hom 16 Hour 17 Hour 18 Hour 19 Hour 20 Hour 21 Hour 22 Hour 23 Hour 24 249.42 1 21.283
Average 228.094 1 1.877 Range 45-9 17 15.769 RMS 13 ,289

ACF-Weig hted Means
O 5 1 O 15 20 25 Subset
Figure 8.18: Weighted (top) hourly means of GPS height measuremena over a 24 hour
period using correlations obtained h m ACF based on 24 hours of data, and clifference
with equaliy weighted means without comlations (bottom). Ermr bars represent 95%
confidence intervals. Note different vertical scale in top plot from that used in Figure 8.15.

more realistic estimate of precision than that deaived h m the unweighted m a n s without
any correlations among the individual height observations.
It should be r d h d that the S/A algorithm is very complex and a closely guarded
secret It cannot be assumed the effet would repeat f h n &y to &y to enable its
prediction. Furthemore, the systematic signals evident in the spectrum and autocorrelation
function may also be due to other effects, such as aopospheric and ionospheric delays and
signal multipath. Consequently, the systematic positionhg efzors can be expected to Vary
spatidy so that, ui general, an autocorrelation function computed for one point would not
be applicable for any other point Further investigations of qxctra for longer time periods,
at different times of the year and at diffant locations wouid be needed to make more
general conclusions about these effects.

Chapter 9 Conclusions and Recommendations
A general least squares (LS) transform and its inverse have been developed which
c m accommodate unequally spaced data, rancbm observation tl~uz?i, arbiuary fiequencies,
arbitrarily weighted and comlated observations, as well as the effect of any a priori
deterministic mode1 on the spectrai components. The L!3 specaum has aiso been
reformulated in terms of this LS tranSfm and its inverse. The conventional Fourier
transfom and derived spectrum have been shown to be just a special case of the more
general LS transform and spectrtun.
The LS transfomi avoids rnany of the limitations associated with the traditional FFT
algorithms. These inciude the requiremena that the &ta be equally spaced and have 2" data
points (some FFT algurithms exist for handling other than 2" data points, but these begin to
lose the computational efficiency of the m. It is also not limited to providing
information only about the 'Fourier" frequencies (Le., the integer multiples of the
fundamentai fkquency). On the other hanci, the LS transfom is much more
computationally demanding than the FFT.
The spectral cornponents in the LS spectrum and inverse LS tmnsform can be
estimated either independently (out of context) of each other or sïmuitaneously (in-wntext)
with each other. However, the simultaneous estimation is very sensitive, in tenns of U-
conditioning, to the choice of muencies while the independent estimation is not.
Independent estimation is thus a more robust estirnatm in general and was also found to
provide a more reliable estimate of the autocorrelation function. Nevertheless, it would be
possible to use the independent estimation for the identification of signifiant spectral

components, and to model only these components in the simulmeous estimatioa of the
inverse LS tfansfomi (for LS approximation) or in the LS specaum and the indirectly
derived a u m l a t i o n function. This would result in a more optimal estimation of the
inverse wnsform and the specmmi, where the wmlations among the estimated specnal
components are taken hto account Care must be taken, however, when selecting these
components to avoid any iuconditioning in the sirnultanaus estimation due to
multicollinearity among the components (see Draper and Smith [l98 1, p. 2581 for a
discussion of multicollinearity). In such cases, o d y the independently estirnated specaal
components can be used. It is recommended to fiirther investigate the advantages and
disadvantages of SimultaneouIy estimating the spectral components.
The most signiFicant application of the LS transfm is in the rigomus determination
of autocomlation functions for unevenly s p d data series. Autocorrelation functions c m
be indirectly denved h m the inverse LS transform of the LS spectrum. These c m then be
used to construct M y populared a priori weight manices for more complete rnodelling of
systematic effects in least squares estimation problems. The tests with real data show that
the use of fully populated weight matrices generally results in an increase in the magnitude
of the standard deviations of the estimateci model parameters. This provides more realistic
estimates of the uncertainties and is thought to be caused by an implicit reduction in
redundancy due to the correlations arnong the observations.
The efiect of correlations among the observations on the estimation of the LS
spectnun was found not to be very significant, as claimed by Steeves [Mi 11, even when
the correlations are relatively large. This is an important consideration because ~ C C O U ~ M ~
for the correlations requires the use of a fuily populated observation covariance ma& in
the weighted f o m of the LS expressions derived here. which imposes a great
computational burden. Ignoring the comlations was found to have littie effect on the
results (estimated specrra and model patameters) but it significantly increases the
computational efficiency. On the other han& as stated above, the use of a priori

correlations among the observations generally gives more realistic
uncertainties associateci with the estGnated mode1 parameters
generally resuits in overly optimistic estimates of the standard deviatons.
Although the algorithm for the LS transform and specmim is relatively slow
compared to the FFI; the computationai efficiency can be greatly impved by using the
trigonometnc identities employed by VaniEek [1971]. It is strongly recommended to use
these in any practical use of the LS tmnsform and specaum. It is also recommended to
investigate the use of "windowing" techniques widely used in traditional Fourier spectra to
reduce the effecn of aliasing (see, e.g.. Press et al. [1992, pp.545-55 11).
Finally, the direct and inverse LS transfomis have been developed here oniy for
one-dimensional problems. Thus, it is srrongly reconmiended to investigate the possibility
of extending the LS transform to multiple dimensions in order to dow for the estimation of
multidimensional spectra and autocorrelation functions. This is especially impairtant in
geodesy, where most problems are of a two- or three-dimensionai name and where
observations are affected by a wide variety of (multidimensional) systematic emrs. In
these cases, a multidimensional form of the LS transforms should ideaily be used.

References
Bendat, J.S. and A.G. Piersoi (197 1). Radom Duta: Anolysis and Measwernem
Procedues. John Wiley and Sons, Inc., New York.
Bracewell, R.N. (1989). The Fourier transform. Scientific Amencan, Vol. 262, No. 6,
June, pp. 86-95.
Bracewell, RN. (1986). The Hartley Traifonn. Oxford University Press, London.
Castle, RO., T.D. Gilmore, R.K. Mark, B.W. Brown, Jr. and R.C. Wilson (1983). An
examination of the southern Calrfomia field test for the systematic accumulation of
the optical refhciion e m r in geodetic leveling. Geophysicd Resemch Letters, Vol.
10, NO. 11, pp. 1081-1084.
Chen, Y.C. (1983). Analysis of deformation srirveys - A generaiized approach. Technical
Report No. 94, Depamnent of Geodesy and Gwmatics Engineering, University of
New Brunswick, Fredericton, N.B.
Chen, Y.C., A. Chrzanowski and M. Kavouras (1990). Assessrnent of observations
using unbiased minimum nom quadratic unbiased estimation (MINQUE). CISM
Journal, Vol. 44, No. 4, pp. 39-46.
Chrzanowski, A., M. Caissy, J. Grodecki, J. Secord (1994). Software development and
naining for geomeaical defornation analysis. Contract Report 95-00 1, Geodetic
Slwey Division, Geomatics Canada, Ottawa.
Cooley, J.W. and J. W. Tukey (1965). An algorithm for the machine calculahon of
complex Fourier series. Mathematical Computing, Vol. 19, pp. 297-30 1.
Craymer, M.R. (1984). Data senes analysis and systematic effects in levelling. M.A.Sc.
Thesis, Dept. of Civil Engineering (Survey Science), University of Toronto,

Toronto; Technïcai Report No. 6, Survey Science, University of Tmnto (Erindale
Campus), Mississauga, Ontario.
Craymer, MM. and P. Van%ek (1985). An investigation of systematic ermrs in Canadian
levebg lines. Roc. Third International Symposium on the North American
Vertical D a m , Rockville, MD, A p d 21-26, pp. 441-447.
Crayrner, MM. and P. VaniCek (1986). FuRher analysis of the 1981 Southern California
field test for levelling refi-action J o d of Geophyscul Research, Vol. 9 1, No.
B9, pp. 9045-9055.
Craymer, MR and P. Vaniiek (1990). A cornparison of various dgorithms for the
spectral analysis of unevenly spaced data series. Presented at the Joint Annual
Meeting of the Canadian Inshtute of Sweying and Mapping and Canadian
Geophysical Union, Ottawa, May 22-25.
Craymer, M.R., P. VanEek and R.O. Castle (1995). Estimation of rod scale enors in
geodetic leveling. Journal of Geophysical Research, Vol. 100, No. B8, pp.
15129- 15145.
Dahlquist, G. and A. Bjorck ( 1 974). Nwnerical Methoh. Pren tice-Hall, Inc., Englewood
Cliffs, NJ.
Dana, PH. (1997). Global Positioning System Overview. The Geographer's M t
Project, Department of Geography, University of Texas at Austin. World Wide
Web address <h ttp://www.utexas.ed~depts/grg!gcraft/notes/gps/gps.h tmb
Deeming, T.J. (1975). Fourier analysis with unequally-spaced data Astrophysics and
Space Science, Vol. 36, pp. 137- 158.
Draper, N.R. and H. Smith (198 1). Applied Regression Analysis. Second Edition. John
Wiley & Sons, New York.
El-Rabbany, A. and A. Kleusberg (1992). Physical correlations in GPS differential
positioning. Ebc. Sixth International Symposium on Satellite Positioning,
Columbus, OH, March 17-20.

El-Rabbany, AE-S. (1994). The Effkct of Physical Comlations on the Ambiguity
ResoIution and Acciiracy Estimation in GPS Differential Positioning. Technical
Rtport No. 170, Department of Geodesy and Geomatics Engineering, University
of New Brunswick, Fredericton, N.B.
Fesraz-Mello, S. (1981). Estimation of paiods from unequdy spaced observations. The
Asnommicul JournclZ, Vol. 86, No. 4, pp. 619-624.
Freund, J E (1 97 1). MuthematicaZ Statistics. Second Edition. Prentice-Hall, Inc .,
Englewood W s , NJ.
Golub, G.H. and C.F. Van Loan (1983). M d Cmpuratiom. The John Hopkins
University Press, Baltimore, MD.
Grafarend, E.W. (1976). Geodetic applications of stochastic processes. Physics of the
Earth und PImerary Interiors, Vol. 12, pp. 15 1 - 179.
Grafarend, E.W. (1984). Variance-mvariancecomponent estimation of Heimert type in
the Gauss-Helmert model. ZfV, Vol. 109, pp. 34-44.
Grafarend, E.W., A. Kleusberg and B. Sch& (1980). An introduction to the variance-
covariance component estimation of Helmert type. ZfV, Vol. 105, pp. 16 1- 180.
Hartiey, R.VL. (1942). A more symmetricd Fourier analysis applied to transmission
problems. Roceedings of the IRE, Vol. 30, p. 144.
Holdahl, S.R. (1981). A rnodel of temperature stratification for the correction of levehg
refraction. Bulletin Geodesique, Vol. 55, No. 3, pp. 231-249.
Home, J.H. and SL. Baliunas (1986). A prescription of p e n d aoalysis of unevenly
sampled time series. The Astrophysicol Journal9 Vol. 302, pp. 757-763.
Kac, M. (1983). What is random? American Scientist, Vol. 7 1, pp. 405-406.
Kelly, K.M. (1991). Weight estimation in geodetic leveiiing uskg variance components
derived from analysis of variance. M.A.Sc. Thesis, Dept of Civil Engineering
(Survey Science), University of Toronto, Toronto.

Kreyszig (1978). Introduciory F~uu:tioruaI Andysis with Applications. John Wiley and
Sons, New York,
Langbein, J. and H. Johnson (1997). Conelated emns in geodetic t h e series:
hglications for time-dependent deformation. Joumal of Geophysical Resemch,
Vol. 102, NO. B 1, pp. 59 1-603.
Langbein, J.O., R.O. Burford and L.E. Slater (1990). Variations in Fault Slip and Snain
Accumulation at PaMield, California.. Initial Results Using TweColor GeOdimeter
Measurements, 1984-1988. J o m l ~Ge~physica l Research, Vol. 95, No. B3,
pp. 2533-2552.
Lomb, N.R. (1976). Least-squares frequency analysis of unequally spaced data.
Asrophysics and Space Science, Vol. 39, pp. 447-462.
Lucht, H. (1972). Korrelation in prazisionsniveiiement 'Wissenschafliche Arbeiten der
Lehrstule fur Geodasïe, P hotogrammetrie und Kmograp hie, Nr. 48, Technisc he
Universitat Hannover.
Lucht, H. (1 983). Neighbourhood-conelarion among observations in levelling networks.
In H. Pelzer and W. Niemeier (Editors), Precise belLing : Con~butions to the
Workrhop on Precise k e l l h g , Dümmler Verlag, Bonn, pp. 315-326.
Maul, G.A. and A. Yanaway (1978). Deep sea tides determination h m GEOS-3. NASA
Contract Repon 141435, National Aeronautics and Space Administration, Waiiops
Flight Center, Wallops Island, VA.
m e r , R.G. (1966). Simultaneolcs Statistical inference. McGraw-Hill, New York.
Moritz, H. Covariance functions in least-squares coilocation. Report No. 240,
Department of Geodetic Science, The Ohio State University, Columbus, OH.
ONeiU, M.A. (1988). Faster than fast Fourier. Byte, Vol. 13, No. 4, pp. 293-300.
Papoulis, A. (1965). Probabiliry, R a n h Vanobles. and Stz~chastic Processes. 2nd
Edition. McGraw-Hill Book Company, New York.

Ress, WH. and G.B. Rybicki (1989). Fast aïgorithm for spectral analysis of unevenly
sampled data. The Amophysicul Jozunai, Vol. 338, pp. 277-280.
Press, WH. and S.A. Teukolsky (1988). Search algorithm for weak periodic signais in
uneveniy spaced data. Conputers in Physàcs, Vol. 2, No. 6, pp. 77-82.
Press, WH., BP. Flannery, S.A. Teukolslq and W.T. Venerling (1986). Numerical
Recipes: The Art of Scienrific Computing. Cambridge University Press,
Camùxidge.
Press, WH., S.A. Teukolsky, W.T. Vetterling and B.P. Flannery (1992). Numerical
Recipes in FORTRAN: The Art of Scienrifc Computing, Second Edition.
Cambridge University Press, Cambridge.
Priestley, M.B. (198 1). Spectral Anaiysis and Tàme Series. Academic Press, London.
Rao, C.R. and I. Kleffe (1988). Estimation of Vuriance Components and Applications.
North-Holland, New York.
Rochester, M.R., O.G. Jensen and D.E. Smylie (1974). A Search for the Earth's 'Nearly
Diurnai Free Wobble'. Geophysicd J o m l of the Royal Astronomkal Society,
Vol. 38, pp. 349-363.
Savage, J-C. and M. Lisowski (1995). Geodetic monitoring of the southern San Ancireas
fa* California, 1980- 199 1. Journal of Geophysicul Research, Vol. 100, pp.
81 85-8192.
Scargle, JD. (1982). Studies in astmnornical time series analysis II: Statistical aspects of
spectrai analysis of unevenly spaced data. The Asrrophysical Journal, Vol. 263,
pp. 835-853.
Schwarz, K.P., M. Sideris, E.G. Anderson, P. Stoliker and S.M. Nakiboglu (1986). A
weight estimation scheme for the NAVD 88 readjusment. Conaact Report 86-02,
Geodetic S urvey Division, Geomatics Canada, Ottawa.

Seeber, G. (1973). Data evaluation by covariance analysis, exercised on photographie
satellite observations. Proc. Symposium on Eanh's Gravitational Field and Secular
Variations in Position, pp. 454-462.
Sjoberg, LE. (1983). Unbiased estimation of variancecovariance components in
condition adjusmients with unknowns - A MINQUE approach. SfV. Vol. 108,
pp. 382-387.
Slater, LE. and G.R Huggett (1976). A multiwavelength distance-measuring insrnunent
for geophysical experiments. Journal of Geophysical Research, Vol. 8 1, pp.6299-
6304.
Steeves, R.R. (1981). A statistical test for significant peaks in the least squares specmun.
In Collected Papers, Geodetic Survey, Sweys and Mapping Branch, Energy,
Mines and Resources Canada, Ottawa, Ontario.
Stein, R.S. and W. Thatcher (1 982). Field test for refraction in leveling. Eos
Transactions, American GeophysicaZ Union, Vol. 63, No. 45, p. 1106.
Stein, R.S., C.T. Whalen, S.R. Holdahl, W.E. Strange and W. Thatcher. Saugus-
Palrndale, California, field test for reection in historical levelling surveys. Journal
of Geophysicai Research, Vol. 9 1, No. B9, pp. 9056-go??.
Taylor, J. and S. Hamilton (1972). Some tests of the Vmiek method of spectral analysis.
Astrophysics and Space Science, Vol. 17, pp. 357-367.
VaniEek, P. (1969a). Approdate specnal analysis by least-squares fit. Asnophysics and
Space Science, Vol. 4, pp. 387-391.
Vmiek, P. (1 969b). New Analysis of the Earth-Pole Wobble. Studia Geophysica et
Geodaetica, Vol. 13, pp. 225-230.
Vantiek, P. (1 97 1). Further developrnent and properties of the spectral analysis by least-
squares. Asnophysics and Space Science, Vol. 12, pp. 10-33.
Vaniiek, P. (1979). Tensor structure and the lest squares. Bulletin Geodesique, Vol. 53,
pp. 22 1-225.

Vaniiek, P. (1986). Diagpmmatic approach to adjusmient calculus. Geodezja, Vol. 86,
No. 999, pp. 29-39.
Vaniiek, P. and M.R. Craymer (1983a). Autocorrelation functions as a diagnostic tool in
leveihg. In H. P e k r and W. Niemeier (Editon), Precire LeveIIing:
Conaibutions ro the Workrhop on Precke Levelling, Diimniler Verlag, Bonn, pp.
327-341.
Vaniiek, P. and M.R. Craymer (1983 b). Autocorrelation hinctions in the search for
systematic errors in levelling. Mm~(scripfa Geodaercu, Vol. 8, pp. 32 1-341.
VamZek, P., GH. Carrera and UR Craymer (1985). Corrections for systematic emrs in
the Canadian levelling network. Technical Report No. 10, Survey Science,
University of Toronto (Exindale Campus), Mississauga, Ontario.
VaoiZek, P. and E.W. Grafarend (1980). On the weight estimation in levelhg. NOAA
Technical Report NOS 86 NGS 17, U.S. Department of C o m c e , National
Oceanic and Amspheric Administration, National Ocean Survey, Rockville, MD.
Wassef, A.M. (1959). Nore on the application of mathematical statistics to the analysis of
levelling errors. Bulletin Geodesique, Vol. 52, pp. 19-25.
Wassef, A.M. (1 974). On the searc h for reliable criteria of the accuracy of precise levefig
based on statis tical considerations of the discre pancies. Builetin Geodesiqw , Vol.
112, pp. 149-163.
Wassef, A.M. (1976). Propagation of enors in precise leveiiing and its bearing on the
assessrnent of ment crustal movements. Bulletin Geodesique, Vol. 53, pp. 53-60.
Weiis, D.E., N. Beck, D. Delikaraoglou, A. Kleusberg, E.J. Krakiwsky, G. Lachapelle,
R.B. Lmgley, M. Nakiboglu, K.-P. Schwarz, J.M. Tranquilla and P. VaniEek
( 1987). Guide to GPS Positioning. Canadian GPS Associates, Fredericton, N.B.
Wells, D.E., P. Vmiek and S. Pagiatakis (1985). Least squares spectral andysis
revisited. Technical Report No. 84, Department of Geodesy and Geomatics
Engineering, University of New Brunswick. Fredericton, N.B.

Whalen. C.T. and W.E. Strange (198 1). The 1981 Saugus to Palmdale, California
leveling refiaction test NOAA Technical Report NOS 98 NGS 27, National
Geodetic Information Center, Rockville, Md.
Zhang, J., Y. Bock, H. Johnson, P. Fang, J. Genrich, S. Williams. S. Wdowinski and J.
Behr (1997). Southen California Pemianent GPS Geodetic Anay: Emn Analysis
of Daily Position Estirnates and Site Velocities. Jownal of Geophysical Resemch.
in press.

l MAGE EVALUATION TEST TARGET (QA-3)