
Computing Persistent Homology Afra Zomorodian and Gunnar Carlsson.
The future shape of neuroimaging with Persistent Homology
Taking Connectivity to a Skeptical Future: Challenges, Tools and TechniquesOHBM 2017, Educational Course
Ben Cassidy
BIOSTATISTICS
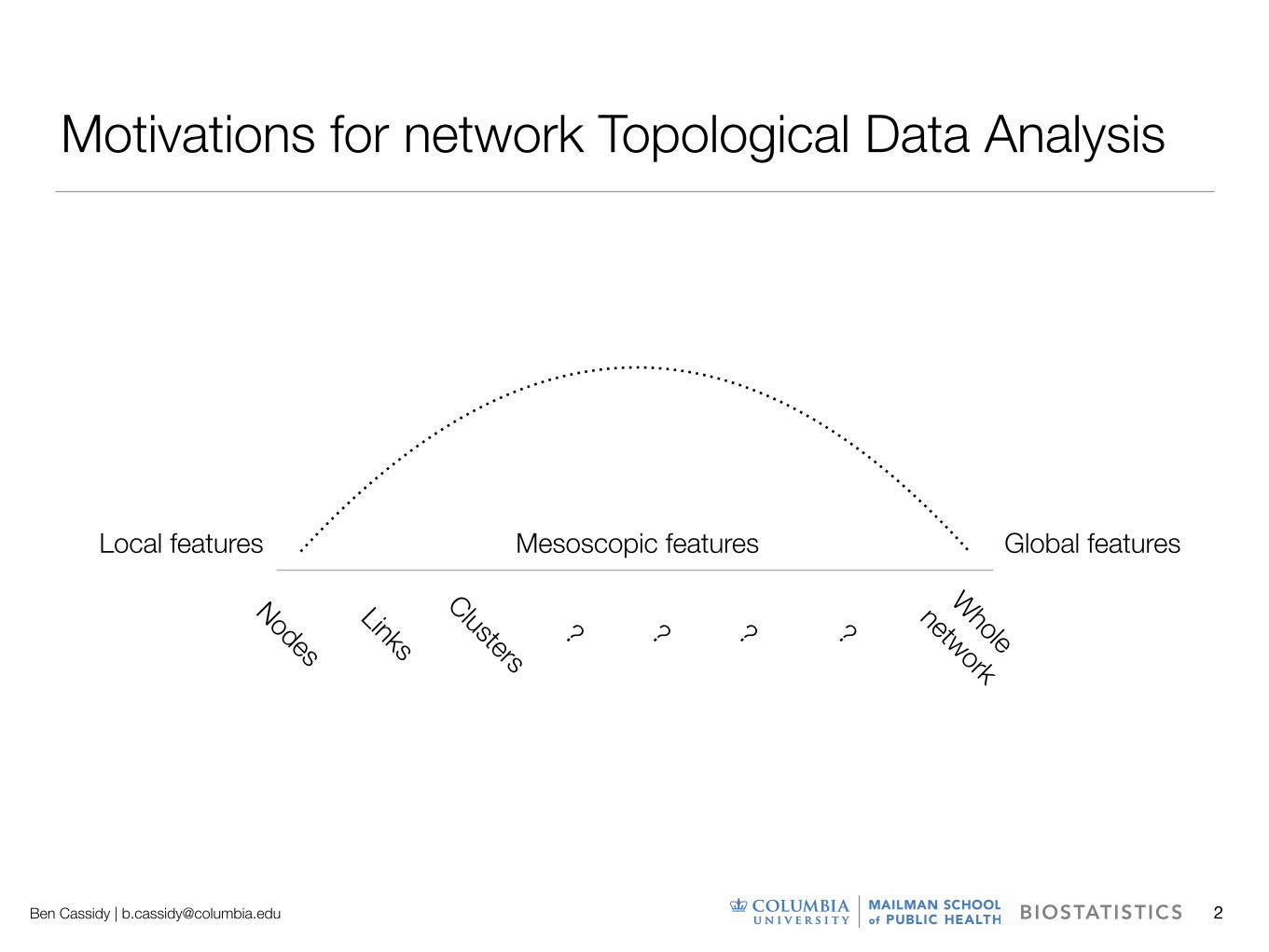
Motivations for network Topological Data Analysis
Local features Global featuresMesoscopic features
NodesLinks
Whole network
Clusters? ? ? ?
2BIOSTATISTICSBen Cassidy | [email protected]
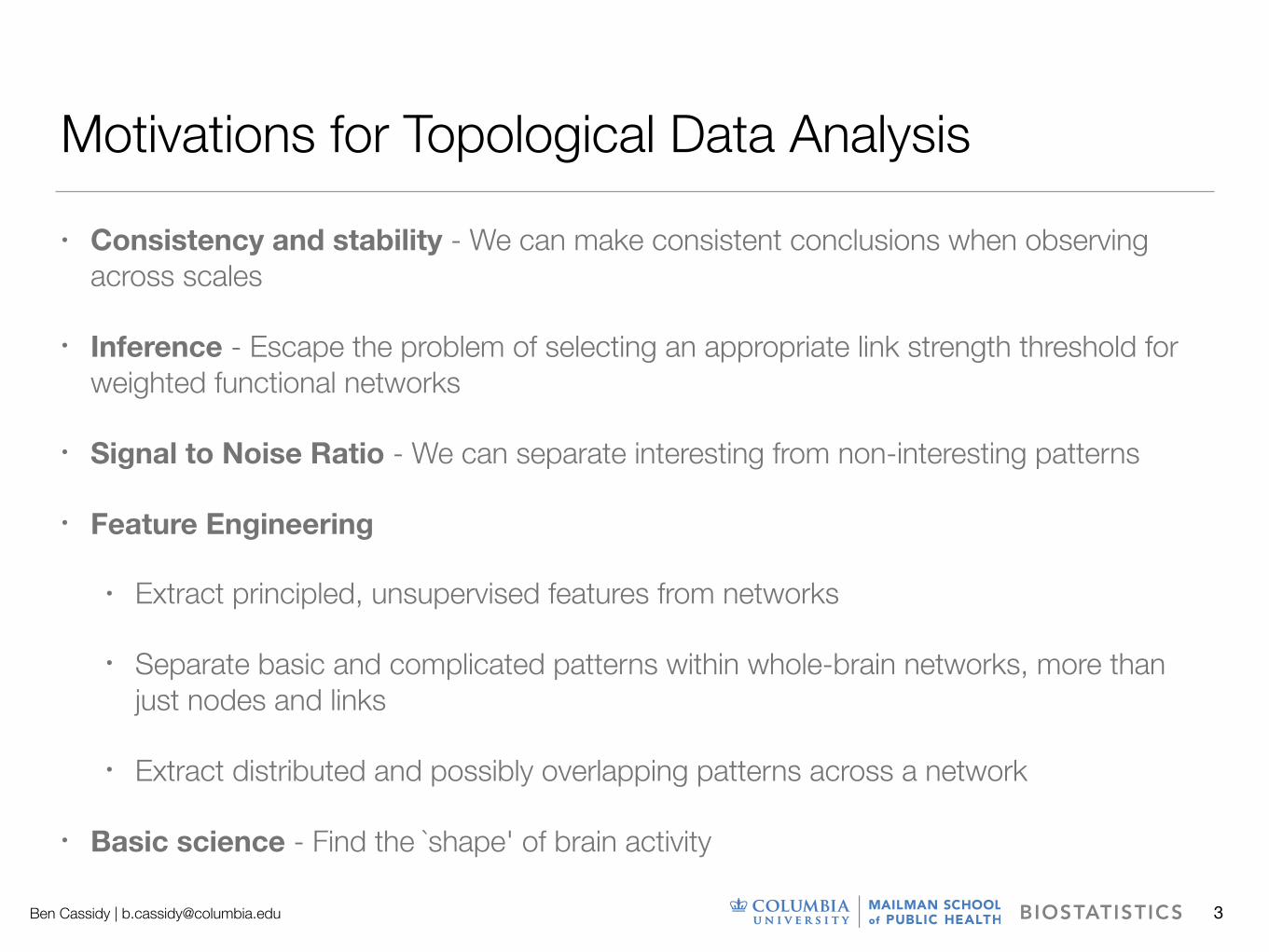
Motivations for Topological Data Analysis
• Consistency and stability - We can make consistent conclusions when observing across scales
• Inference - Escape the problem of selecting an appropriate link strength threshold for weighted functional networks
• Signal to Noise Ratio - We can separate interesting from non-interesting patterns
• Feature Engineering
• Extract principled, unsupervised features from networks
• Separate basic and complicated patterns within whole-brain networks, more than just nodes and links
• Extract distributed and possibly overlapping patterns across a network
• Basic science - Find the `shape' of brain activity
3BIOSTATISTICSBen Cassidy | [email protected]
TDA
• Persistent Homology
• Mapper algorithm
• Other related areas
• Graph Signal Processing
• Clustering
• Geometry
• Manifold learning
• Morphological Signal Processing
• …
4BIOSTATISTICSBen Cassidy | [email protected]
Topology basics
5
• Topology is the study of
• shape properties that are preserved under continuous deformations
• qualitative features, e.g. Homology describes the holes at each dimension: 0 = connected components, 1 = loops, 2 = voids, …
• donuts and coffee mugs
BIOSTATISTICSBen Cassidy | [email protected]
Topology basics
• Topology is the study of
• shape properties that are preserved under continuous deformations
• qualitative features, e.g. Homology describes the holes at each dimension: 0 = connected components, 1 = loops, 2 = voids, …
• donuts and coffee mugs
6BIOSTATISTICSBen Cassidy | [email protected]
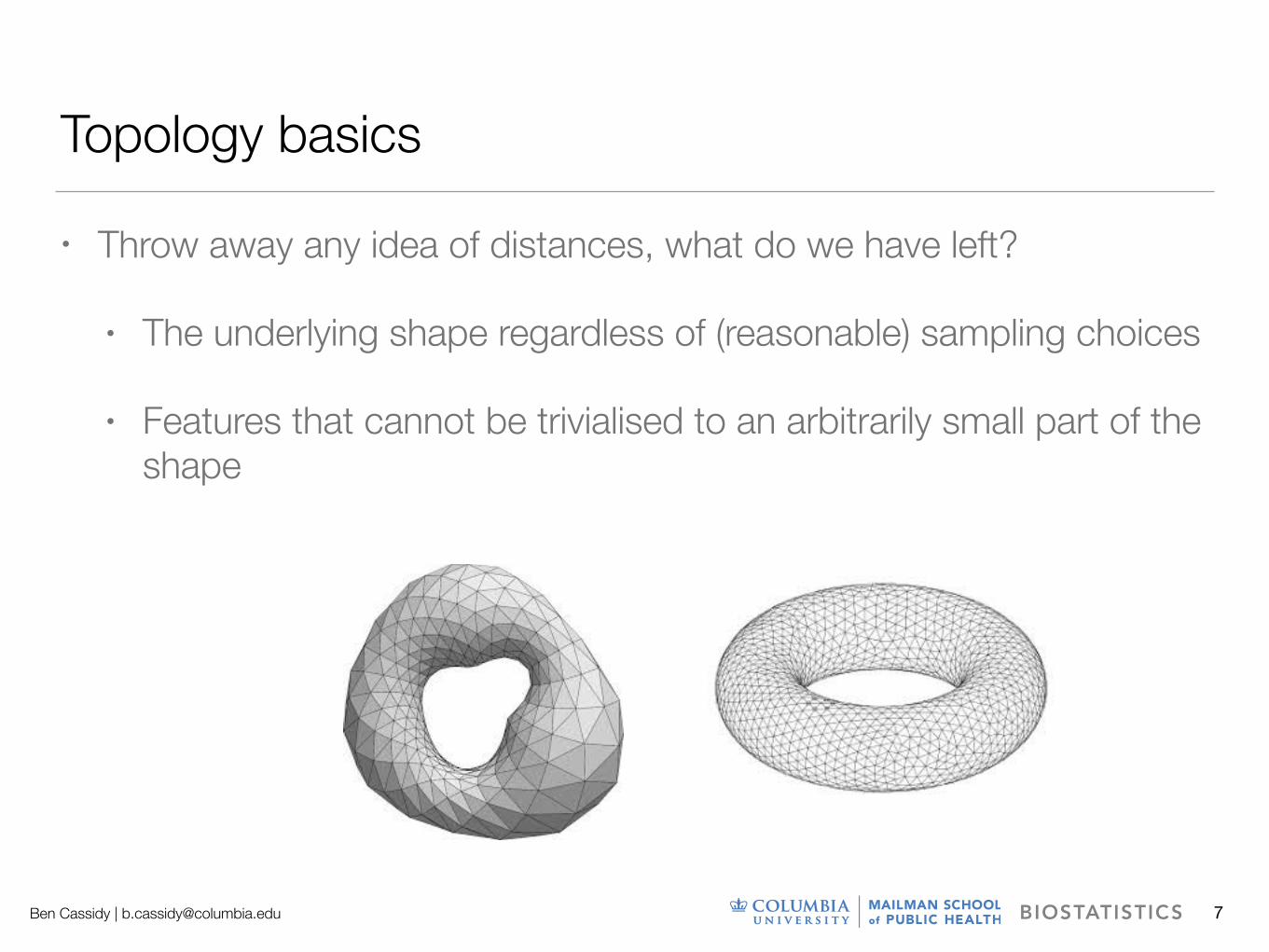
• Throw away any idea of distances, what do we have left?
• The underlying shape regardless of (reasonable) sampling choices
• Features that cannot be trivialised to an arbitrarily small part of the shape
Topology basics
7BIOSTATISTICSBen Cassidy | [email protected]
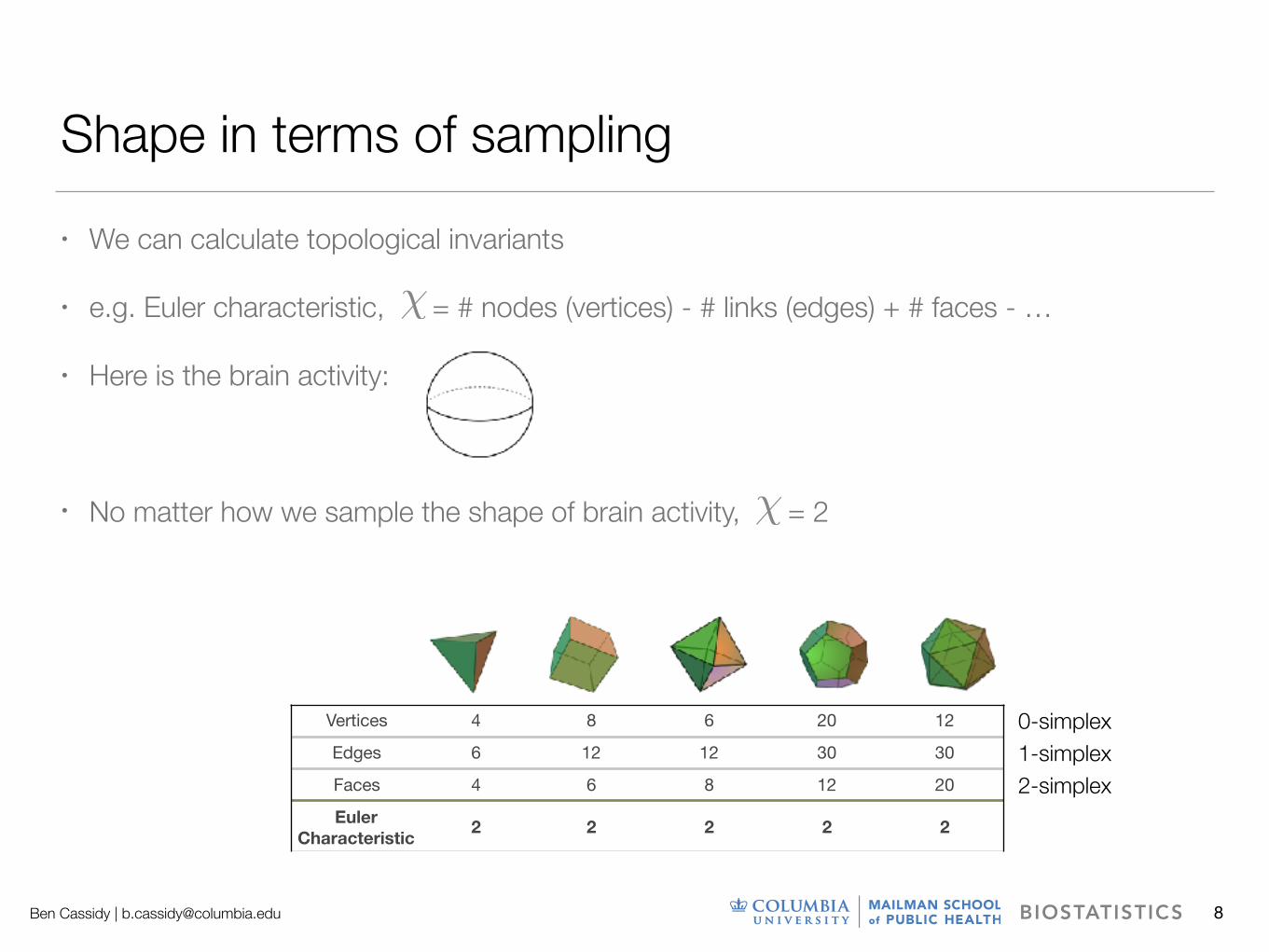
Shape in terms of sampling• We can calculate topological invariants
• e.g. Euler characteristic, = # nodes (vertices) - # links (edges) + # faces - …
• Here is the brain activity:
• No matter how we sample the shape of brain activity, = 2
�
�
0-simplex1-simplex2-simplex
8
Vertices 4 8 6 20 12
Edges 6 12 12 30 30
Faces 4 6 8 12 20
Euler Characteristic 2 2 2 2 2
BIOSTATISTICSBen Cassidy | [email protected]
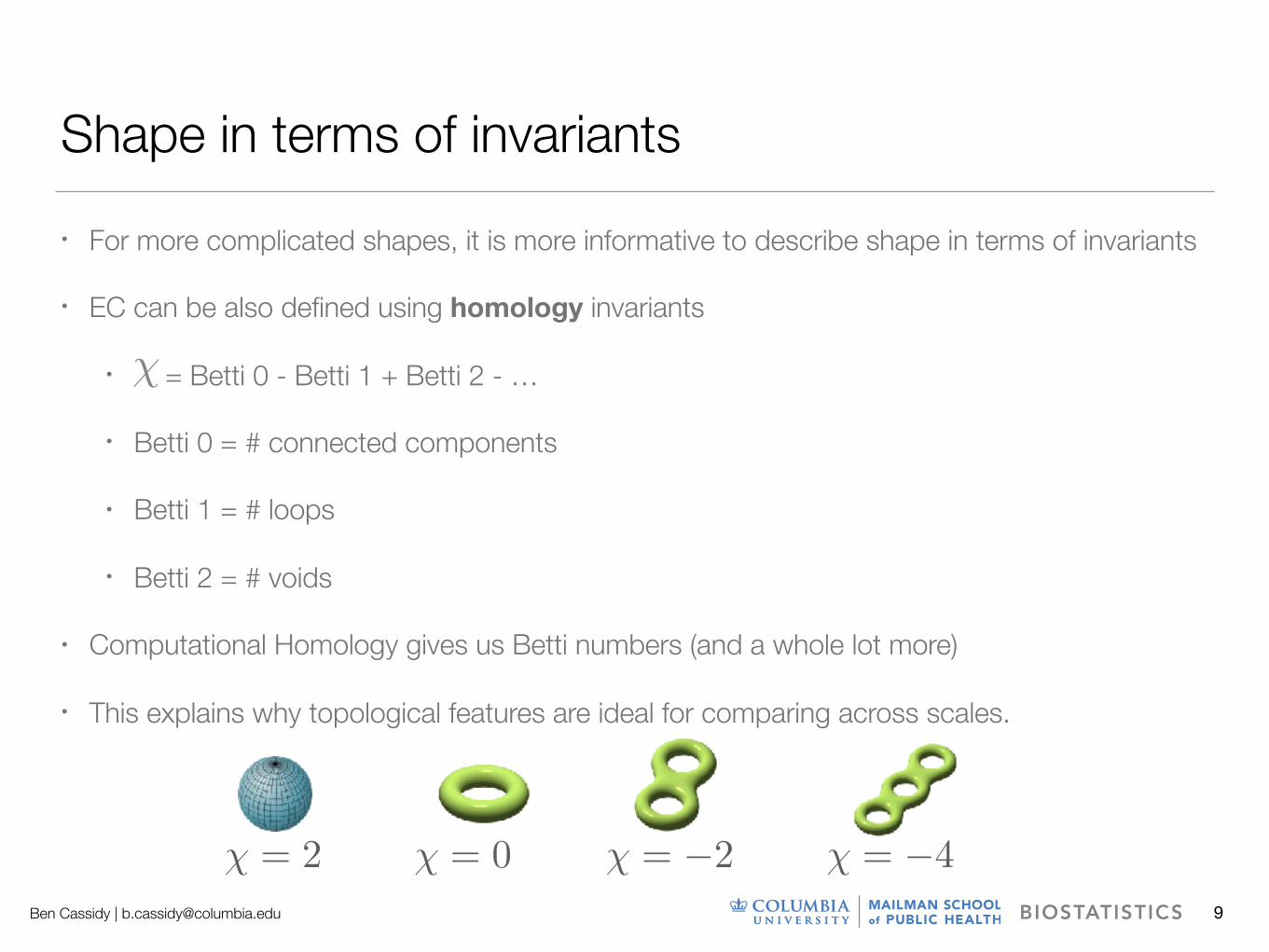
• For more complicated shapes, it is more informative to describe shape in terms of invariants
• EC can be also defined using homology invariants
• = Betti 0 - Betti 1 + Betti 2 - …
• Betti 0 = # connected components
• Betti 1 = # loops
• Betti 2 = # voids
• Computational Homology gives us Betti numbers (and a whole lot more)
• This explains why topological features are ideal for comparing across scales.
Shape in terms of invariants
�
9
� = 2 � = 0 � = �2 � = �4BIOSTATISTICSBen Cassidy | [email protected]
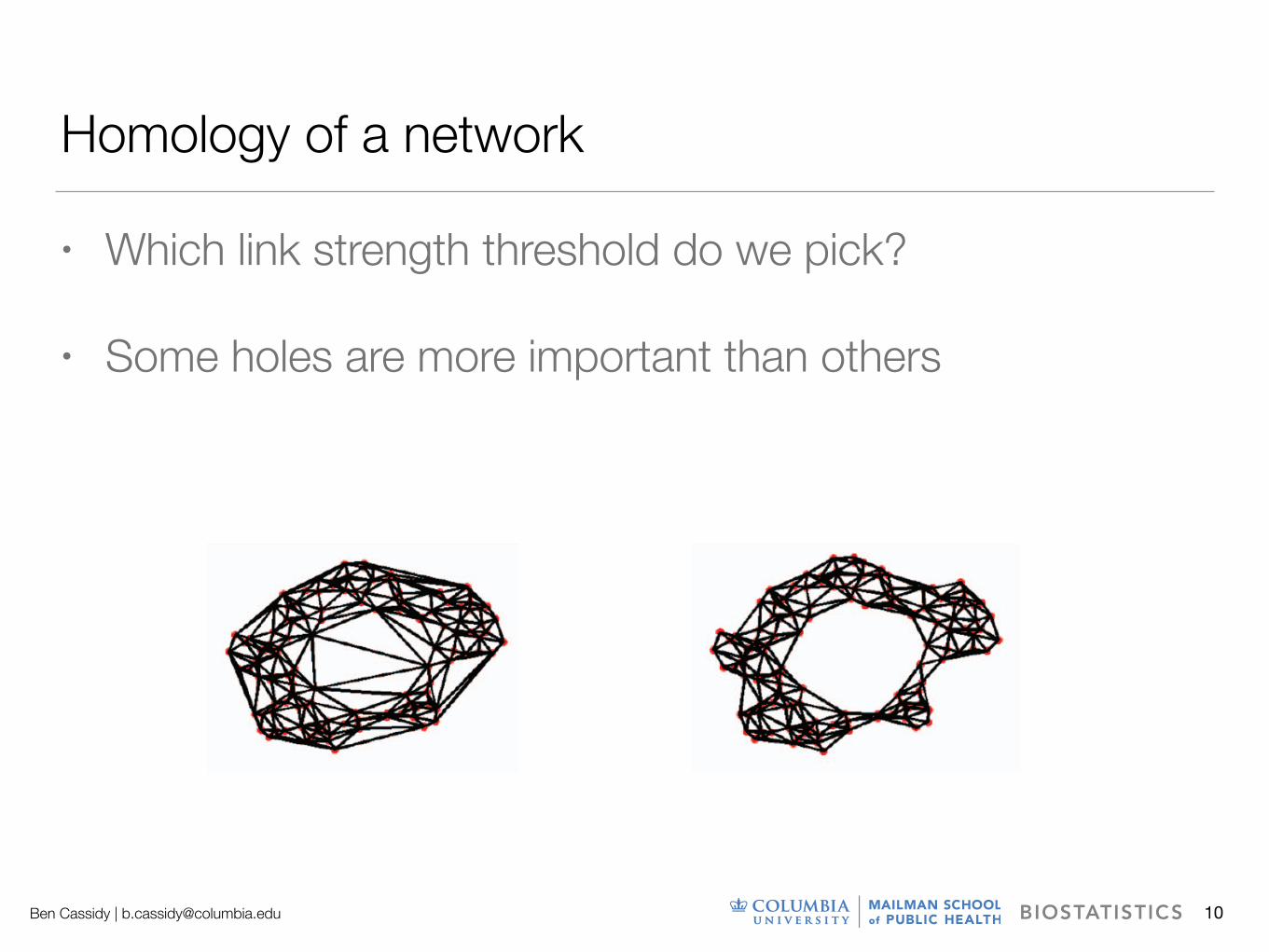
Homology of a network
• Which link strength threshold do we pick?
• Some holes are more important than others
101IEEE SIGNAL PROCESSING MAGAZINE | March 2016 |
nonwheeze signal appears as chaotic, and its topology is also nicely captured at a minimal computational cost.
Sensor networksThe application of algebraic topology in sensor networks is very illustrative of its utility. Owing to the difficulties of obtaining location information of the sensors in the field and to the need for additional hardware to compute precise dis-tances between pairs of sensors, it may be prohibitively expensive to obtain geometric information. Interestingly,
problems like verifying coverage are purely topological in nature, and, as discussed previously, computational topology provides a coordinate-free solution to quantifying the cover-age status as topological information.
Consider a set of sensors randomly deployed in a region to be monitored. Two problems are often of interest:
■ verifying if the region being monitored is actually fully covered and accounted for
■ discovering uncovered regions and identifying their sur-rounding nodes.
FIGURE 10. A way to approximate the coverage area, shown in (b), in sensor networks using a complex constructed from the communication graph. If the communication radius is twice the individual sensor coverage radius, the Rips shadow is a good topological approximation to the coverage area, as shown in (d). (a) Sensors in a plane. (b) Sensor coverage. (c) The Cech complex. (d) The Rips shadow.
(a) (b) (c) (d)
FIGURE 9. The wheeze-detection process. In (a), the top row corresponds to normal signals, while the bottom two rows correspond to wheeze signals. (a) Delay embeddings. (b) Various samplings of a wheeze. (c) A triangulation of a wheeze. (d) A triangulation with large edges removed.
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8–0.5 0 0.5
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8–0.5 0 0.5
X(t+τ)
X (t ) X (t )
X(t+τ)
(a) (b)
(c) (d)
101IEEE SIGNAL PROCESSING MAGAZINE | March 2016 |
nonwheeze signal appears as chaotic, and its topology is also nicely captured at a minimal computational cost.
Sensor networksThe application of algebraic topology in sensor networks is very illustrative of its utility. Owing to the difficulties of obtaining location information of the sensors in the field and to the need for additional hardware to compute precise dis-tances between pairs of sensors, it may be prohibitively expensive to obtain geometric information. Interestingly,
problems like verifying coverage are purely topological in nature, and, as discussed previously, computational topology provides a coordinate-free solution to quantifying the cover-age status as topological information.
Consider a set of sensors randomly deployed in a region to be monitored. Two problems are often of interest:
■ verifying if the region being monitored is actually fully covered and accounted for
■ discovering uncovered regions and identifying their sur-rounding nodes.
FIGURE 10. A way to approximate the coverage area, shown in (b), in sensor networks using a complex constructed from the communication graph. If the communication radius is twice the individual sensor coverage radius, the Rips shadow is a good topological approximation to the coverage area, as shown in (d). (a) Sensors in a plane. (b) Sensor coverage. (c) The Cech complex. (d) The Rips shadow.
(a) (b) (c) (d)
FIGURE 9. The wheeze-detection process. In (a), the top row corresponds to normal signals, while the bottom two rows correspond to wheeze signals. (a) Delay embeddings. (b) Various samplings of a wheeze. (c) A triangulation of a wheeze. (d) A triangulation with large edges removed.
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8–0.5 0 0.5
0.6
0.4
0.2
0
–0.2
–0.4
–0.6
–0.8–0.5 0 0.5
X(t+τ)
X (t ) X (t )
X(t+τ)
(a) (b)
(c) (d)
10BIOSTATISTICSBen Cassidy | [email protected]
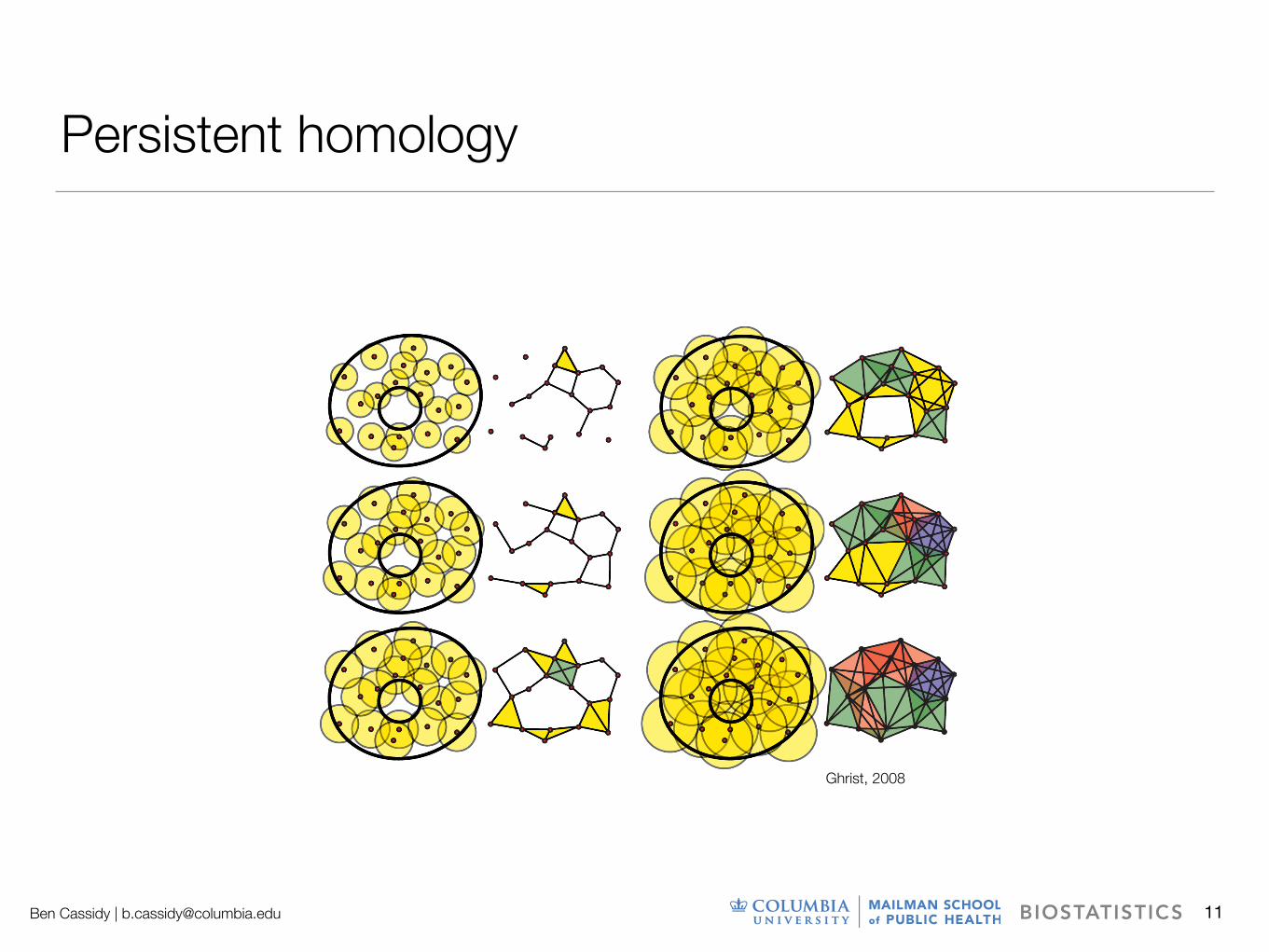
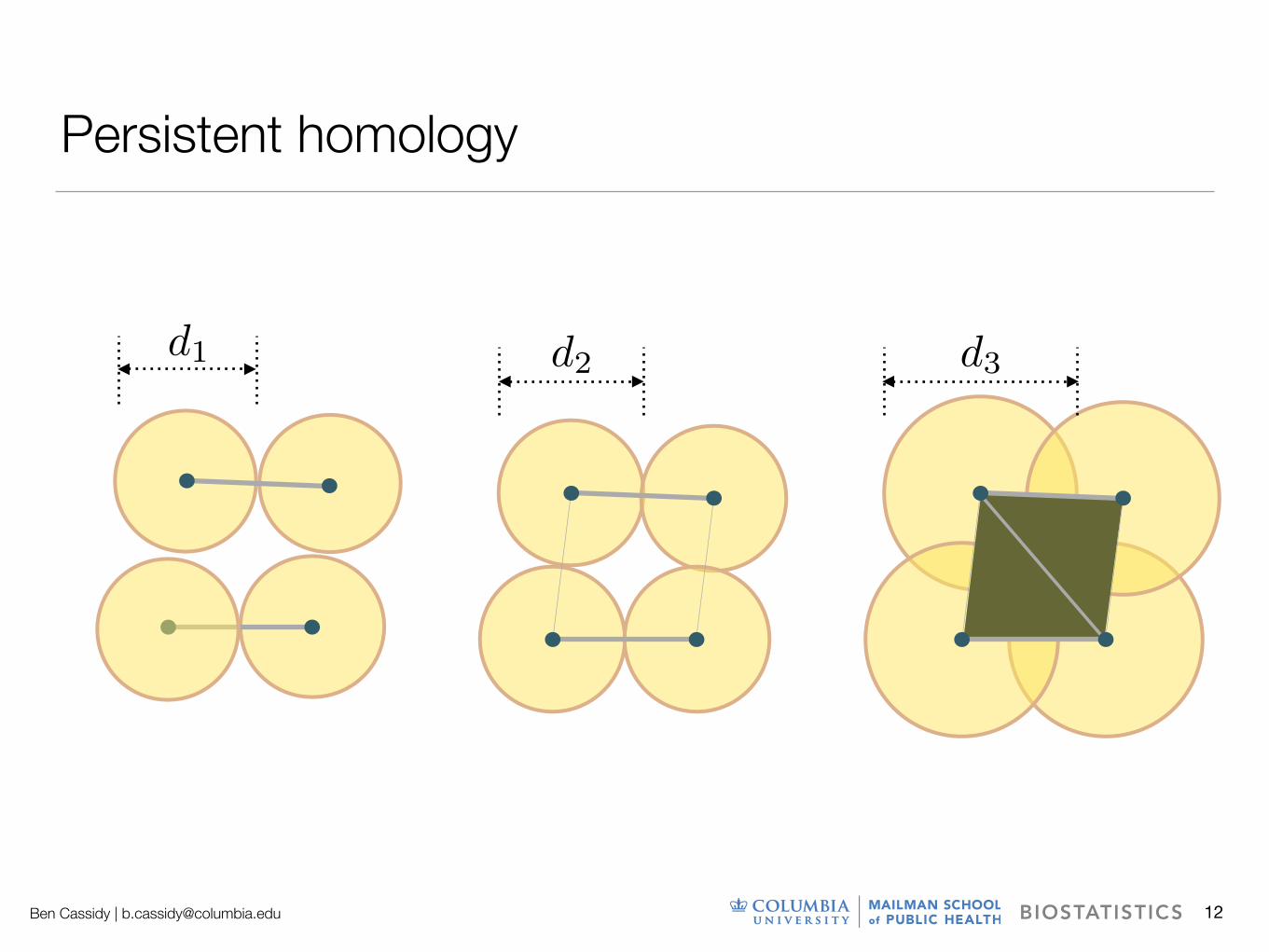
Persistent homology
11BIOSTATISTICSBen Cassidy | [email protected]
PERSISTENT TOPOLOGY OF DATA 65
Figure 3. A sequence of Rips complexes for a point cloud dataset representing an annulus. Upon increasing ϵ, holes appear anddisappear. Which holes are real and which are noise?
assume a rudimentary knowledge of homology, as is to be found in, say, Chapter 2of [15].
Despite being both computable and insightful, the homology of a complex asso-ciated to a point cloud at a particular ϵ is insufficient: it is a mistake to ask whichvalue of ϵ is optimal. Nor does it suffice to know a simple ‘count’ of the number andtypes of holes appearing at each parameter value ϵ. Betti numbers are not enough.One requires a means of declaring which holes are essential and which can be safelyignored. The standard topological constructs of homology and homotopy offer nosuch slack in their strident rigidity: a hole is a hole no matter how fragile or fine.
2.1. Persistence. Persistence, as introduced by Edelsbrunner, Letscher, andZomorodian [12] and refined by Carlsson and Zomorodian [22], is a rigorous re-sponse to this problem. Given a parameterized family of spaces, those topologicalfeatures which persist over a significant parameter range are to be considered assignal with short-lived features as noise. For a concrete example, assume thatR = (Ri)N
1 is a sequence of Rips complexes associated to a fixed point cloud for anincreasing sequence of parameter values (ϵi)N
1 . There are natural inclusion maps
(2.1) R1ι
↪→ R2ι
↪→ · · · ι↪→ RN−1
ι↪→ RN .
Instead of examining the homology of the individual terms Ri, one examines thehomology of the iterated inclusions ι : H∗Ri → H∗Rj for all i < j. These mapsreveal which features persist.
As a simple example, persistence explains why Rips complexes are an acceptableapproximation to Cech complexes. Although no single Rips complex is an especiallyfaithful approximation to a single Cech complex, pairs of Rips complexes ‘squeeze’the appropriate Cech complex into a manageable hole.
Ghrist, 2008
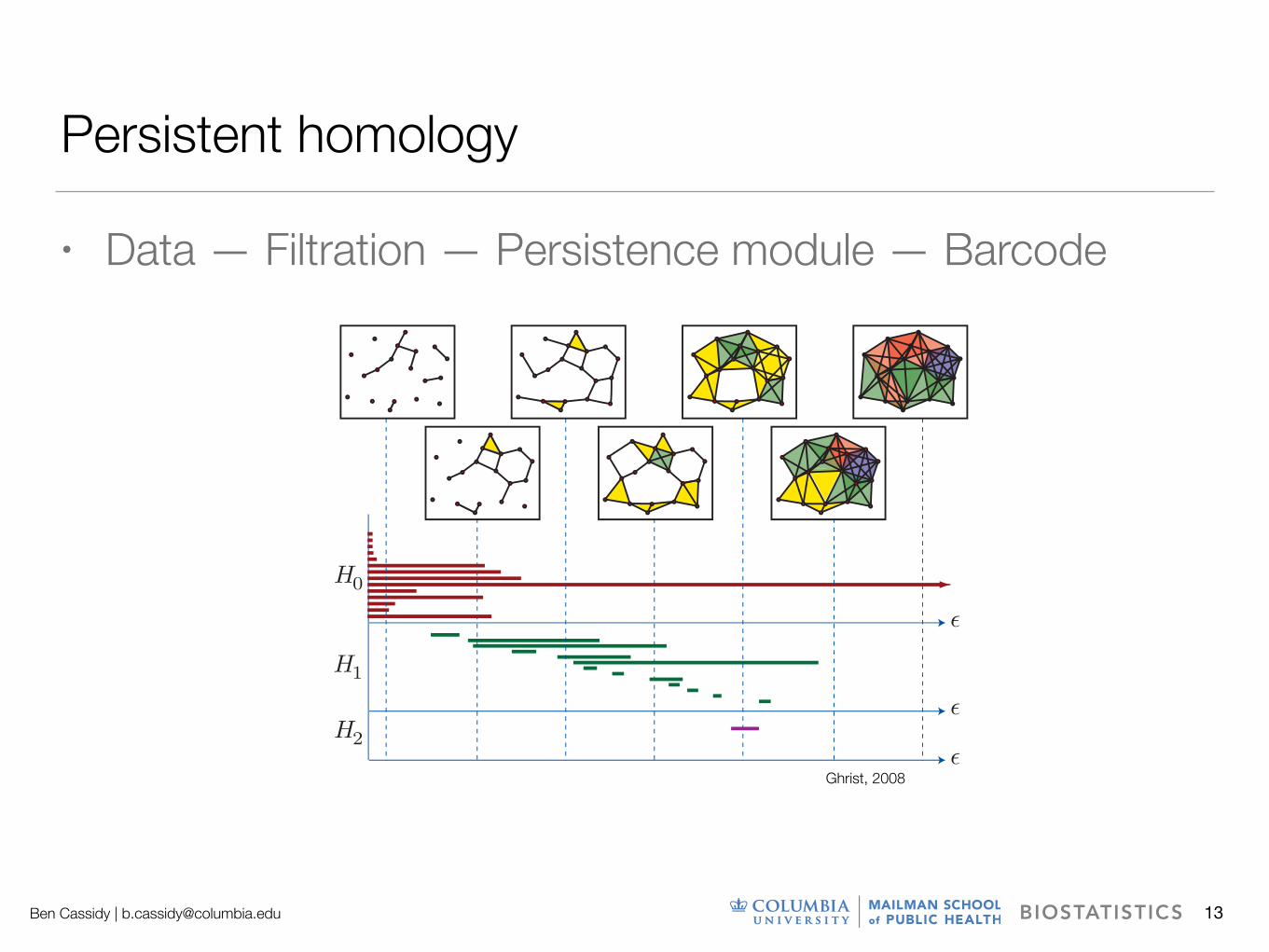
Persistent homology
• Data — Filtration — Persistence module — Barcode
BIOSTATISTICSBen Cassidy | [email protected]
Ghrist, 2008
PERSISTENT TOPOLOGY OF DATA 67
which come into existence at parameter ti and which persist for all future parame-ter values. The torsional elements correspond to those homology generators whichappear at parameter rj and disappear at parameter rj + sj . At the chain level,the Structure Theorem provides a birth-death pairing of generators of C (exceptingthose that persist to infinity).
2.3. Barcodes. The parameter intervals arising from the basis for H∗(C; F ) inEquation (2.3) inspire a visual snapshot of Hk(C; F ) in the form of a barcode. Abarcode is a graphical representation of Hk(C; F ) as a collection of horizontal linesegments in a plane whose horizontal axis corresponds to the parameter and whosevertical axis represents an (arbitrary) ordering of homology generators. Figure 4gives an example of barcode representations of the homology of the sampling ofpoints in an annulus from Figure 3 (illustrated in the case of a large number ofparameter values ϵi).
H0
H1
H2ϵ
ϵ
ϵ
Figure 4. [bottom] An example of the barcodes for H∗(R) in theexample of Figure 3. [top] The rank of Hk(Rϵi) equals the numberof intervals in the barcode for Hk(R) intersecting the (dashed) lineϵ = ϵi.
Theorem 2.3 yields the fundamental characterization of barcodes.
Theorem 2.4 ([22]). The rank of the persistent homology group Hi→jk (C; F ) is
equal to the number of intervals in the barcode of Hk(C; F ) spanning the parameterinterval [i, j]. In particular, H∗(Ci
∗; F ) is equal to the number of intervals whichcontain i.
A barcode is best thought of as the persistence analogue of a Betti number.Recall that the kth Betti number of a complex, βk := rank(Hk), acts as a coarsenumerical measure of Hk. As with βk, the barcode for Hk does not give any in-formation about the finer structure of the homology, but merely a continuously
13
Examples
• Human Connectome Project resting state data
• Three examples
★ Architecture (presence of links) vs dynamics (link strength)
★ Consistency between parcellations
★ Persistent homology of sparse networks
BIOSTATISTICSBen Cassidy | [email protected] 14
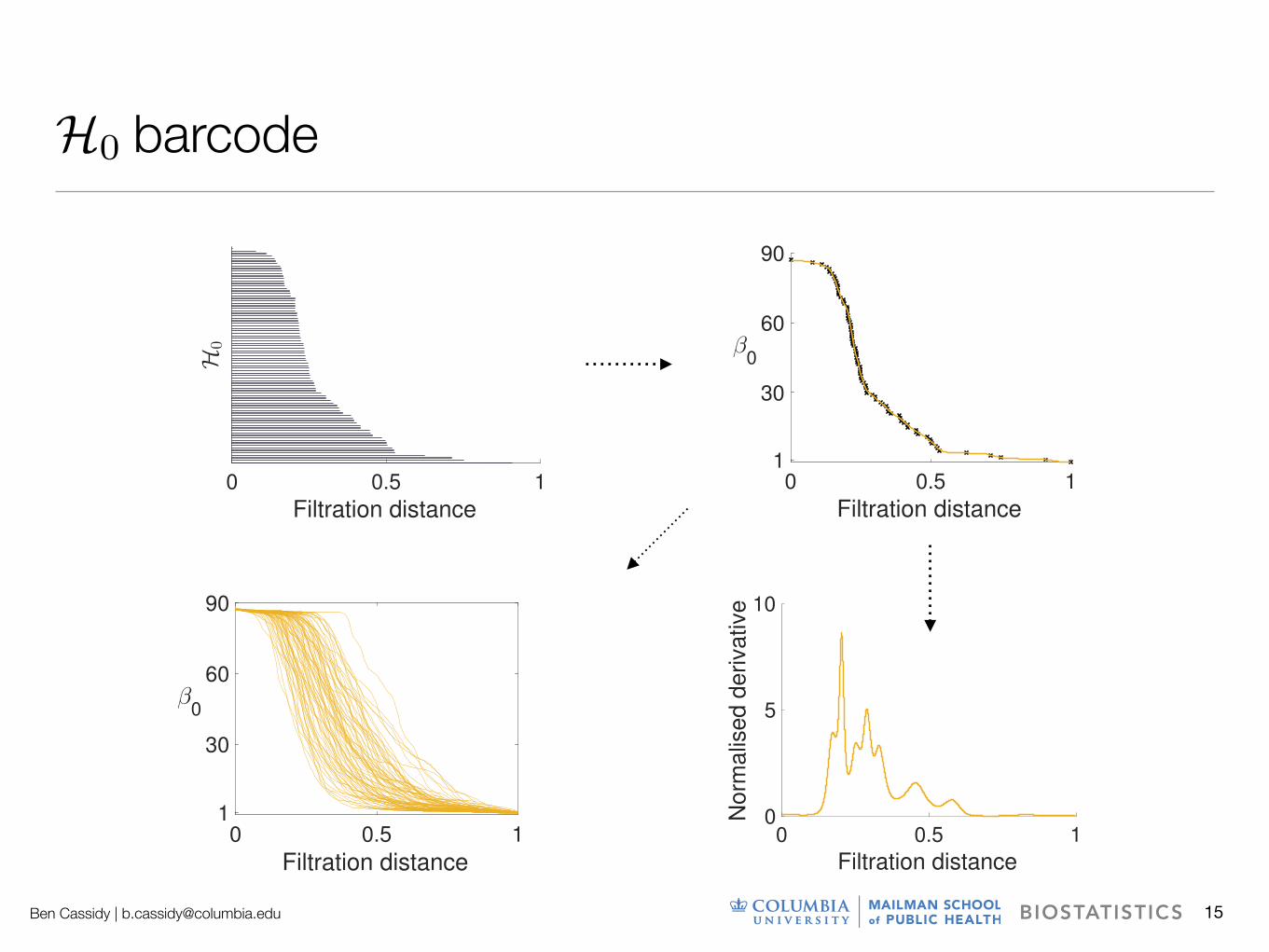
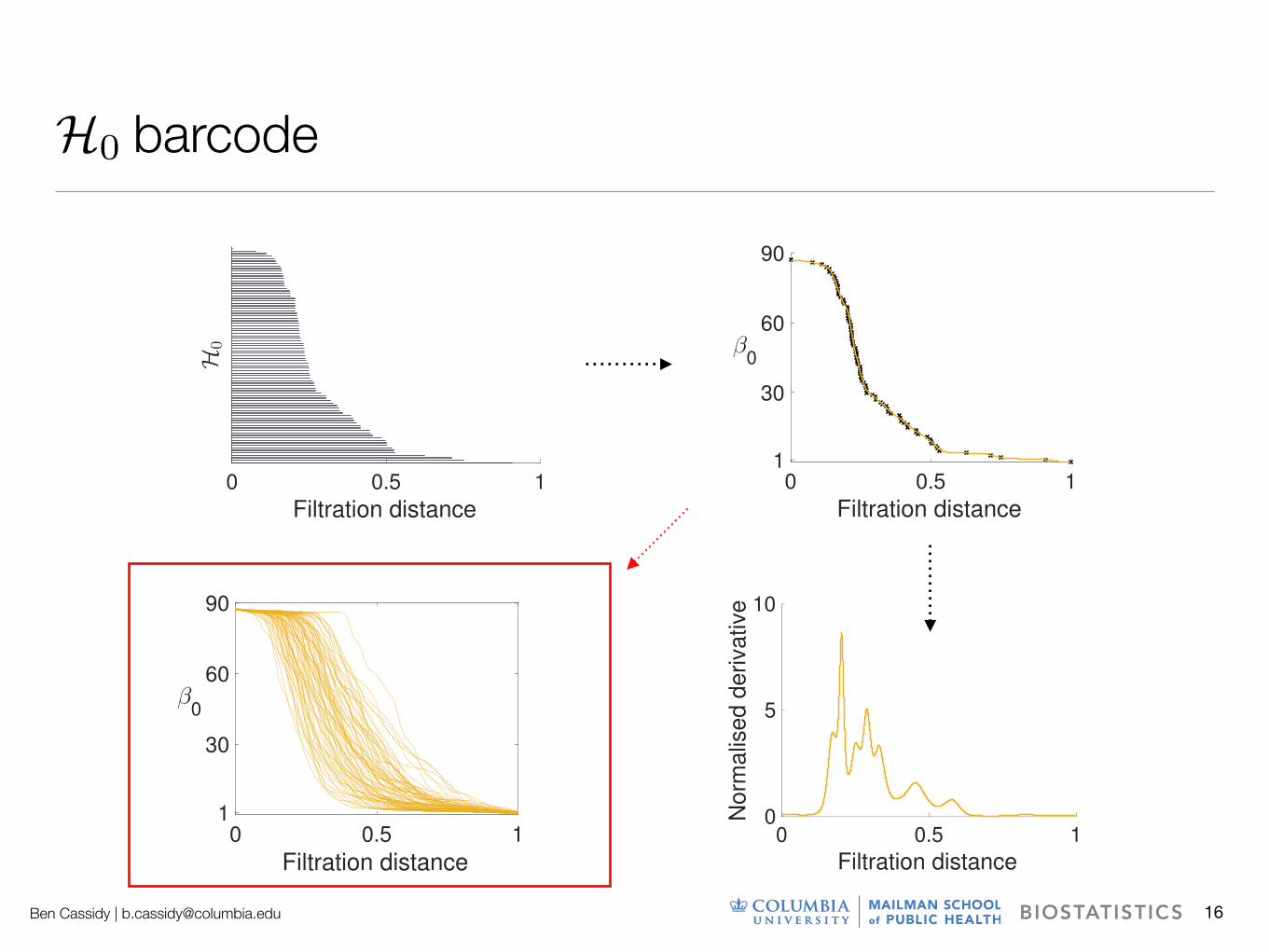
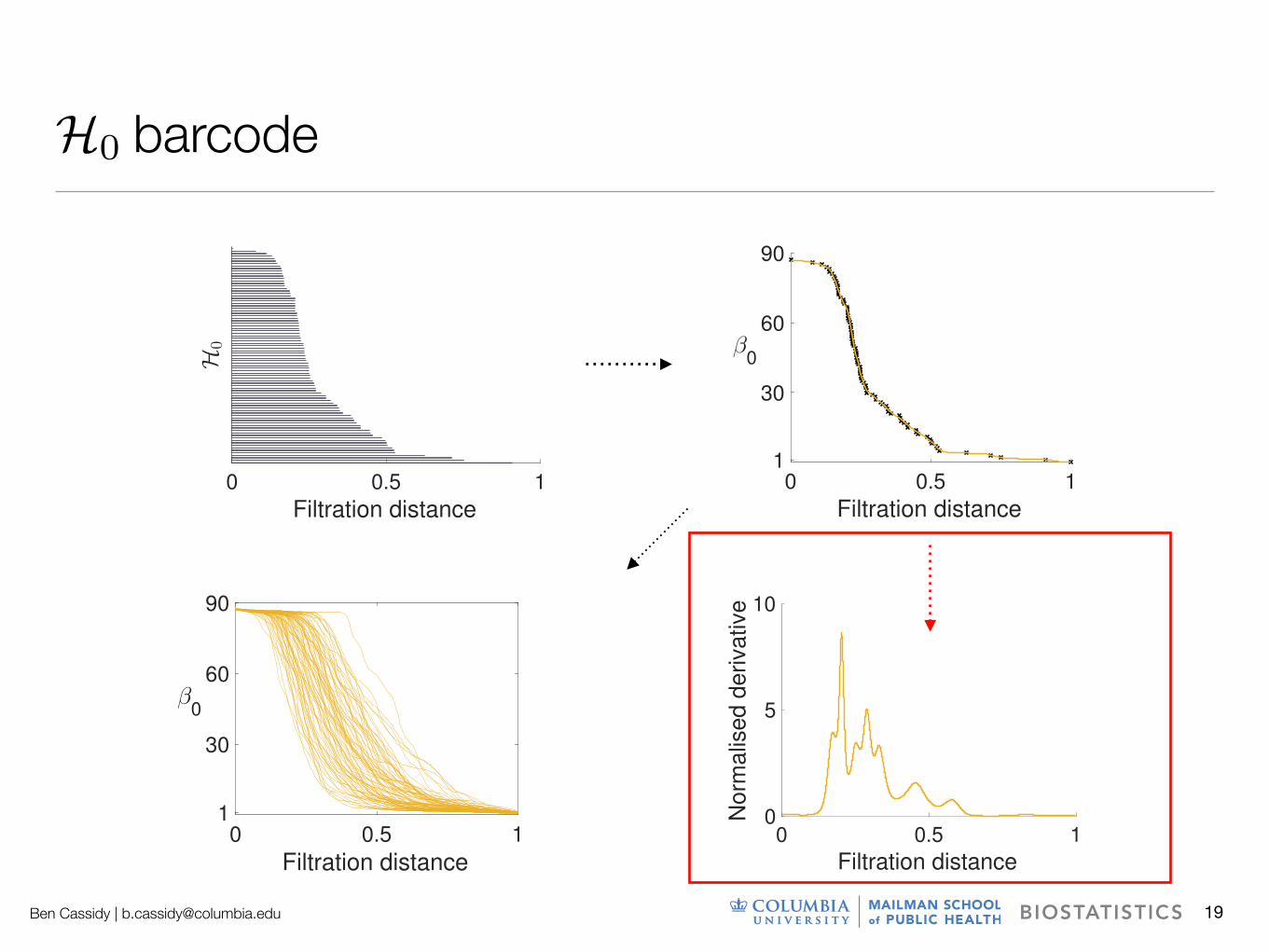
barcode
15
0 0.5 1
Filtration distance
H0
BIOSTATISTICSBen Cassidy | [email protected]
0 0.5 1
Filtration distance
0
5
10
No
rma
lise
d d
eriva
tive
0 0.5 1
Filtration distance
1
30
60
90
β0
0 0.5 1
Filtration distance
1
30
60
90
β0
H0
16
0 0.5 1
Filtration distance
H0
BIOSTATISTICSBen Cassidy | [email protected]
0 0.5 1
Filtration distance
0
5
10
No
rma
lise
d d
eriva
tive
0 0.5 1
Filtration distance
1
30
60
90
β0
0 0.5 1
Filtration distance
1
30
60
90
β0
barcodeH0
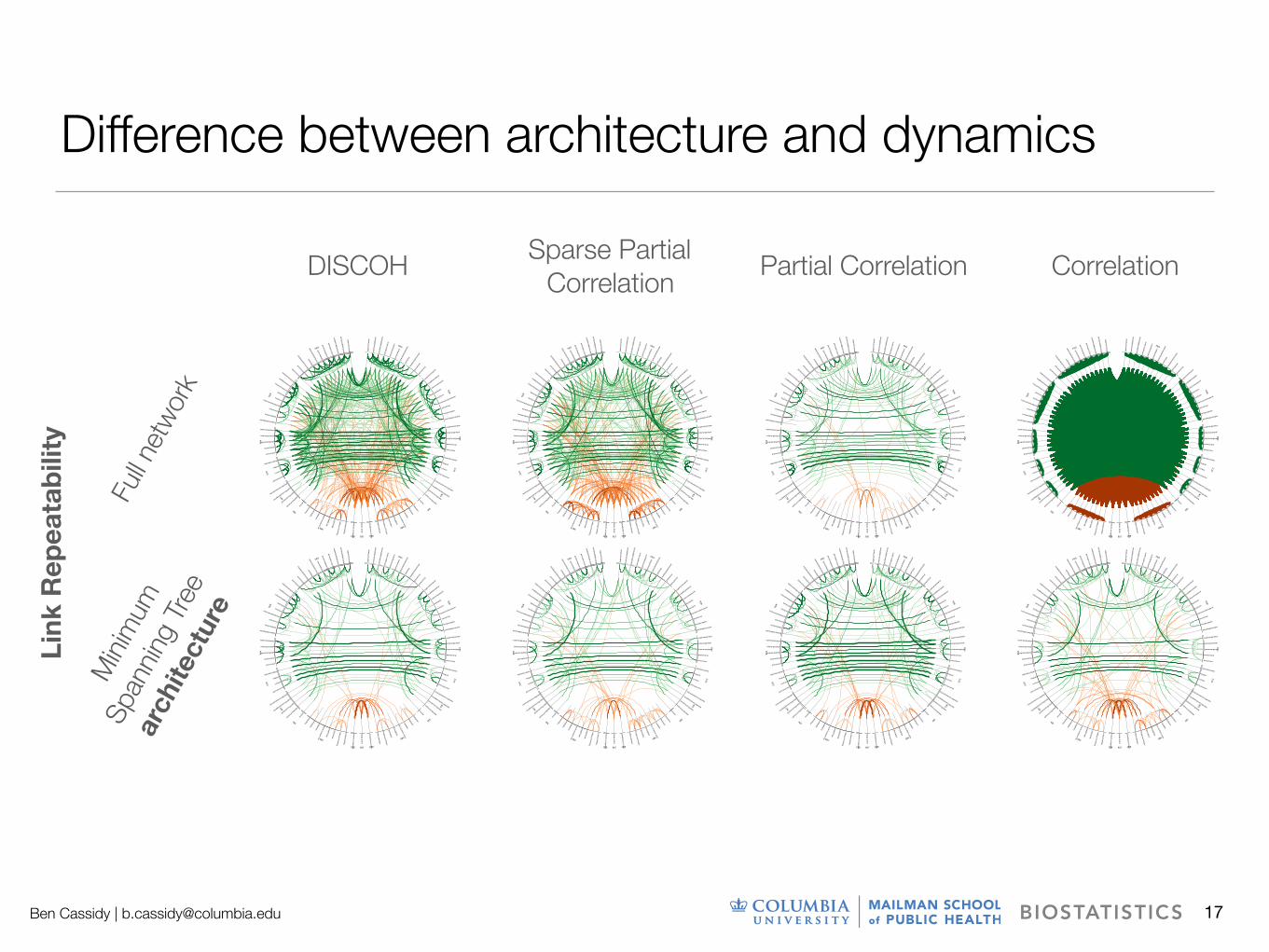
Difference between architecture and dynamics
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
Full n
etwor
k
Minim
um
Span
ning T
ree
arch
itect
ure
DISCOH Sparse Partial Correlation Partial Correlation Correlation
17BIOSTATISTICSBen Cassidy | [email protected]
Link
Rep
eata
bilit
y

Difference between architecture and dynamics
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostralan
teriorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercu
laris parsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
Full n
etwor
k
MST
arch
itect
ure
18BIOSTATISTICSBen Cassidy | [email protected]
DISCOH Sparse Partial Correlation Partial Correlation Correlation
0 0.5 1
Filtration distance
1
87
fβ0(d)
0 0.5 1
Filtration distance
1
87
fβ0(d)
0 0.5 1
Filtration distance
1
87
fβ0(d)
0 0.5 1
Filtration distance
1
87
fβ0(d)
MST
dyna
mic
s
19
0 0.5 1
Filtration distance
H0
BIOSTATISTICSBen Cassidy | [email protected]
0 0.5 1
Filtration distance
0
5
10
No
rma
lise
d d
eriva
tive
0 0.5 1
Filtration distance
1
30
60
90
β0
0 0.5 1
Filtration distance
1
30
60
90
β0
barcodeH0
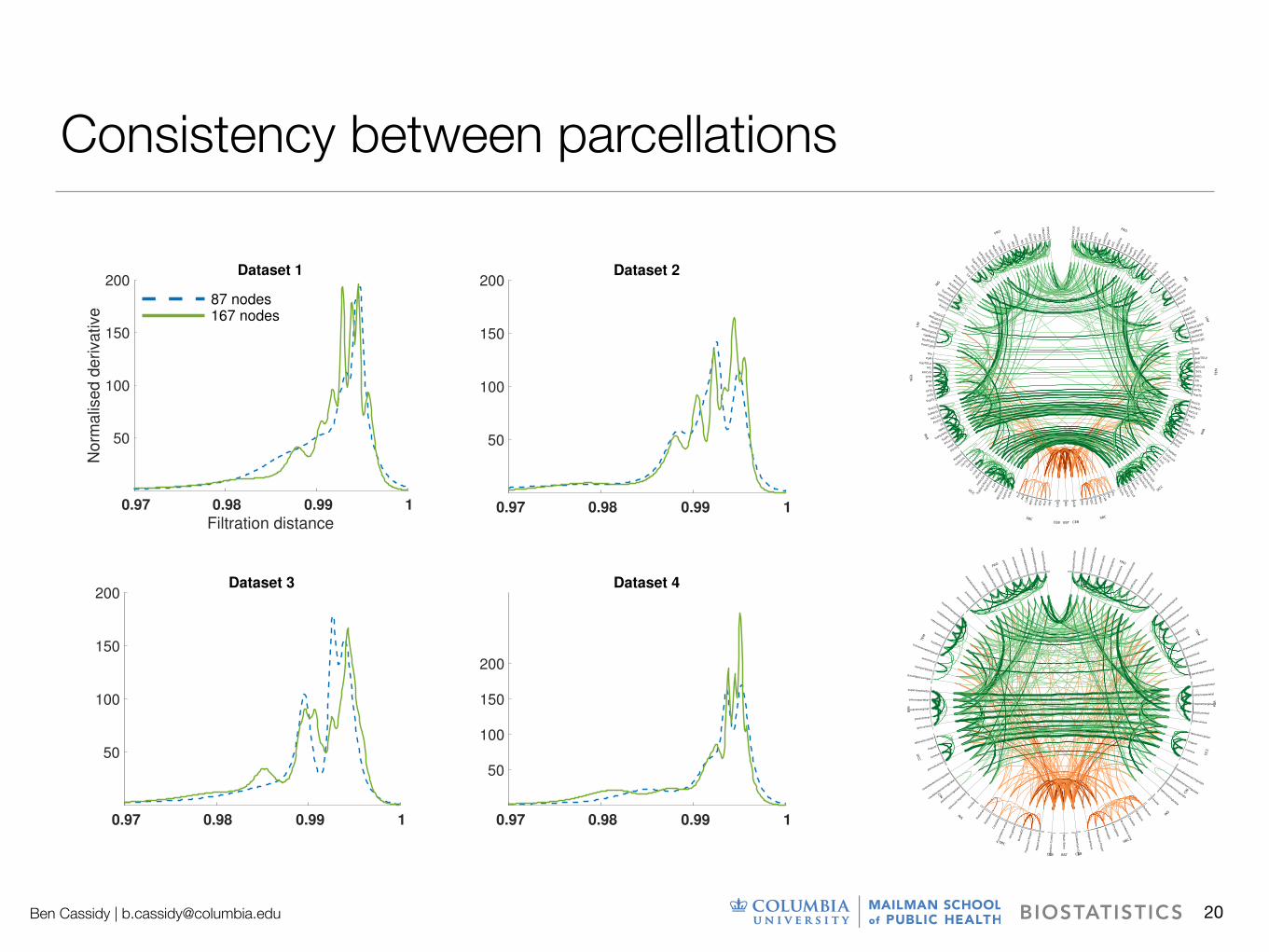
Consistency between parcellationsFRO
INS
LIM
TEM
PAR
OCC
SBC
CEBBSTCEBSBC
OCC
PAR
TEM
LIM
INS
FRO
SupOcS/TrOcS
SupOcS/TrO
cS
MPosCgG/S
MPosCg
G/S
IntPS/
TrPS
IntPS/TrPS
LoInG/CInSLoInG
/CInS
MOcS/LuS
MOcS/LuS
TrFPoG/S Tr
FPoG/S
MACgG/S
MACgG
/S
PosTrCoS
PosTrCoS
SupCirInSSupCirIn
S
CoS/LinS
CoS/LinS
InfFGTrip
InfFGOpp
PosDCgG
InfFGTrip
InfFGOpp
PosDCgG
SupTGLp
InfOcG/S
SupTGLp
InfOcG/S
FMarG/S
PosVCgG
FMarG/S
PosVCgG
InfFG
Orp
CgSMarp
InfFGOrp
CgSMarp
ALSHorpALSHorp
SupPrCS
SupPrCS
ALSVerpALSVerp
InfCirInS
ACgG/S
InfCirInS
ACgG
/S
SbCG/S
SupO
cG
SbCG/S
SupOcG
MedO
rS
SuMarG
MedOrS
SuMarG
ATrCoS
ATrCoS
PaCL/S
PaCL/S
InfPrCS
InfPrCS
ACirInSACirInS
PaHipG
PaHipG
PerCaS
PerCaS
ShoInGShoIn
G
LOcTS
LOcTS
SbCaG
SbCaG
SupTS
SupTS
SupFG
PosCG
SupFG
PosCG
SupPL
SupPL
SbOrS
SupFS
SbOrS
SupFS
PosCS
MOcG
PosCS
MOcG
PosLSPosLS
PrCun
PrCun
AOcS
AOcS
InfTG
InfTG
POcS
POcSAngG
OcPo
AngG
OcPo
TrTS
InfTS
TrTS
InfTS
PrCG
SbPS
PrCG
SbPS
NAcc
NAcc
LOrS
InfFS
MTG
LOrS
InfFS
MTG
MFG M
FG
VDC
VDC
MFS M
FS
PoPl
Amg
PoPl
Amg
LinG
LinG
TPo
CaN
TPo
CaN
OrG O
rG
CeB
CeB
FuG
FuG
OrS
CcS
Tha
OrS
CcS
Tha
Cun
Cun
TPl
BSt
TPl
Hip
Hip
HG
HG
RG
Pal
RG
Pal
CS
CS
Pu
Pu
JS
JS
FRO
TEM
PAR
OCC
CIN
INS
SBC
CEBBSTCEB
SBC
INS
CIN
OCC
PAR
TEM
FRO
rostra
lanter
iorcin
gulate
rostralanteriorcingulate
caudala
nteriorcingulate
caudalanteriorcingulate
ostra
lmiddlefro
ntal
caudalm
iddlefro
ntal
rostralm
iddlefront
caudalm
iddlefronta
medialorbitofrontal
medialorbitofrontal
transversetemporal
transve
rsetem
poral
lateralorbitofrontal
lateralorbitofrontal
erebellum-Cortex
Cerebellum-Corte
posteriorcingulate
posteriorcingulate
Thalamus-Proper
Thalamus-Pro
per
parahippocampal
parahippoca
mpal
isthmuscingulate
superiortemporal
isthmuscingulate
superiortemporal
Accum
bens-area
Accum
bens-area
inferiortemporalinferiortem
poral
middletemporalmidd
letem
poral
superiorparietal
superiorparietal
parstrian
gularis p
arstriangularis
parsop
ercularis p
arsopercularis
superio
rfrontal
lateralocc
ipital
superiorfrontal
lateraloccipital
inferiorparietal
inferiorparietal
supramarginal
supramarginal
Hippocampus
Hippocampus
temporalpole
temporalpole
perica
lcarine
pericalcarine
parsorbitalis parsorbitalis
Brain-Stem
paracentral
postcentral
paracentral
postcentral
VentralDC
VentralD
C
precentral
entorhinal
precuneus
Amygdala
precentral
entorhin
al
precuneus
Amygdala
InfFGOrp In
fFGOrp
Putamen
Putamen
bankssts
Pallidum
banksst
s
Pallidum
Caudate
Caudate
fusiformfus
iform
cuneus
cuneus
insular
lingual
insular
lingual
BIOSTATISTICSBen Cassidy | [email protected] 20
0.97 0.98 0.99 1
50
100
150
200
Dataset 4
0.97 0.98 0.99 1
50
100
150
200Dataset 3
0.97 0.98 0.99 1
Filtration distance
50
100
150
200
No
rma
lise
d d
eriva
tive
Dataset 1
87 nodes
167 nodes
0.97 0.98 0.99 1
50
100
150
200Dataset 2
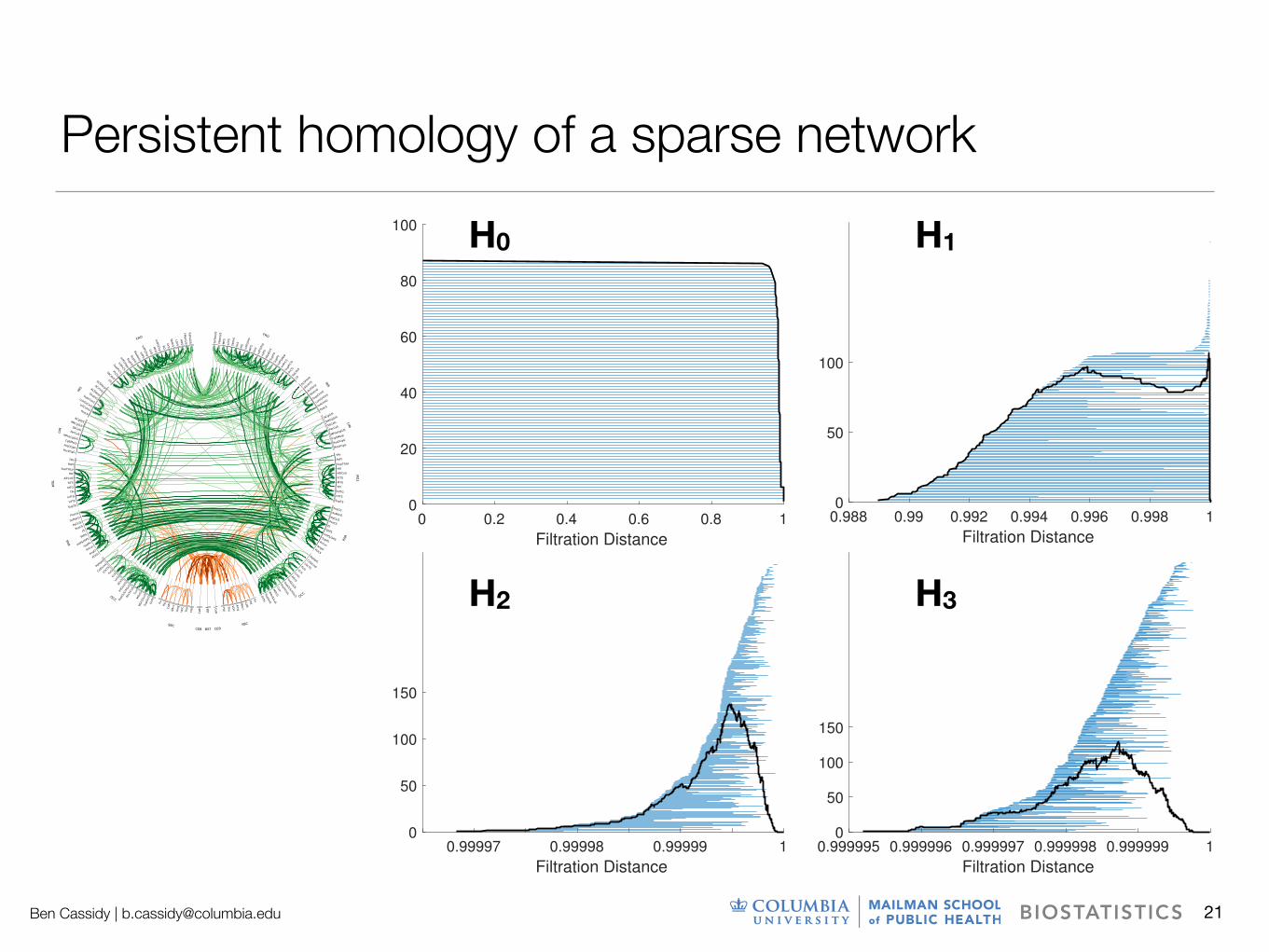
Persistent homology of a sparse network
0.988 0.99 0.992 0.994 0.996 0.998 1
Filtration Distance
0
50
100
Be
tti 1
0.99997 0.99998 0.99999 1
Filtration Distance
0
50
100
150
Be
tti 2
0.999995 0.999996 0.999997 0.999998 0.999999 1
Filtration Distance
0
50
100
150
Be
tti 3
BIOSTATISTICSBen Cassidy | [email protected] 21
H1
H2 H3
FRO
INS
LIM
TEM
PAR
OCC
SBC
CEBBSTCEBSBC
OCC
PAR
TEM
LIM
INS
FRO
SupOcS/TrOcS
SupOcS/TrO
cS
MPosCgG/S
MPosCg
G/S
IntPS/
TrPS
IntPS/TrPS
LoInG/CInSLoInG
/CInS
MOcS/LuS
MOcS/LuS
TrFPoG/S Tr
FPoG/S
MACgG/S
MACgG
/S
PosTrCoS
PosTrCoS
SupCirInSSupCirIn
S
CoS/LinS
CoS/LinS
InfFGTrip
InfFGOpp
PosDCgG
InfFGTrip
InfFGOpp
PosDCgG
SupTGLp
InfOcG/S
SupTGLp
InfOcG/S
FMarG/S
PosVCgG
FMarG/S
PosVCgG
InfFG
Orp
CgSMarp
InfFGOrp
CgSMarp
ALSHorpALSHorp
SupPrCS
SupPrCS
ALSVerpALSVerp
InfCirInS
ACgG/S
InfCirInS
ACgG
/S
SbCG/S
SupO
cG
SbCG/S
SupOcG
MedO
rS
SuMarG
MedOrS
SuMarG
ATrCoS
ATrCoS
PaCL/S
PaCL/S
InfPrCS
InfPrCS
ACirInSACirInS
PaHipG
PaHipG
PerCaS
PerCaS
ShoInGShoIn
G
LOcTS
LOcTS
SbCaG
SbCaG
SupTS
SupTS
SupFG
PosCG
SupFG
PosCG
SupPL
SupPL
SbOrS
SupFS
SbOrS
SupFS
PosCS
MOcG
PosCS
MOcG
PosLSPosLS
PrCun
PrCun
AOcS
AOcS
InfTG
InfTG
POcS
POcSAngG
OcPo
AngG
OcPo
TrTS
InfTS
TrTS
InfTS
PrCG
SbPS
PrCG
SbPS
NAcc
NAcc
LOrS
InfFS
MTG
LOrS
InfFS
MTG
MFG M
FG
VDC
VDC
MFS M
FS
PoPl
Amg
PoPl
Amg
LinG
LinG
TPo
CaN
TPo
CaN
OrG O
rG
CeB
CeB
FuG
FuG
OrS
CcS
Tha
OrS
CcS
Tha
Cun
Cun
TPl
BSt
TPl
Hip
Hip
HG
HG
RG
Pal
RG
Pal
CS
CS
Pu
Pu
JS
JS0 0.2 0.4 0.6 0.8 1
Filtration Distance
0
20
40
60
80
100
Be
tti 0
H0

Persistent homology of a sparse network
0.988 0.99 0.992 0.994 0.996 0.998 1
Filtration Distance
0
50
100
Be
tti 1
H1
x400 networks
Ben Cassidy | [email protected] 22
Reading list• Chad Giusti’s website for TDA in neuroscience
• http://www.chadgiusti.com/bib.html
• Introductions to TDA:
• Ghrist, 2008, “Barcodes: the persistent topology of data”
• Carlsson, 2009, “Topology and data”
• Krim et al., 2016, “Discovering the Whole by the Coarse: A topological paradigm for data analysis”
• A few recent neuroimaging/neuroscience applications:
• Memory gating Hahm et al. 2017, “Gating of memory encoding of time-delayed cross-frequency MEG networks revealed by graph filtration based on persistent homology”
• Brain arteries Bendich et al., 2016, “Persistent homology analysis of brain artery trees”
• Time varying connectivity Yoo et al., 2016, “Topological Persistence Vineyard for Dynamic Functional Brain Connectivity during Resting and Gaming Stages”
• Multimodal networks Lee et al., 2016, “Integrated multimodal network approach to PET and MRI based on multidimensional persistent homology”
• Anatomical networks Chung et al., 2015, “Persistent homology in sparse regression and its application to brain morphometry”
• TDA for Neuroscience Curto, 2015, “What can topology tell us about the neural code?”
23BIOSTATISTICSBen Cassidy | [email protected]
Posters at OHBM
• 1855, Tuesday Lee et al., “Homological changes of metabolic connectivity during the transition to Alzheimer's disease”
• 4182, Wednesday Suryadevara et al., “Topological data analysis of fMRI signals in the hippocampus during learning: Function to structure”
• 4176, Wednesday Riaño et al., “TDA barcodes to identify topological features of resting state fMRI time courses in healthy subjects”
• 4189, Thursday Garg et al., “Persistence homology of brain geometry: a marker for preterm birth”
• 4174, Wednesday BC et al., “Exploratory Multidimensional Persistent Homology of Functional Connectivity Networks”
• 4061, Thursday, BC et al., “Sparse Functional Connectivity”
BIOSTATISTICSBen Cassidy | [email protected] 24


















