Tesis de marco julio bareño
91
-
Upload
marco-bareno -
Category
Documents
-
view
237 -
download
4
description
Tesis de grado para optar al titulo de Ingeniero electrónico en computación. El tema es la obtención de señales ECG o electrocardiograma en roedores de forma no invasiva
Transcript of Tesis de marco julio bareño

i

ii
UNIVERSIDAD YACAMBÚ
VICERECTORADO ACADÉMICO
FACULTAD DE INGENIERÍA
SISTEMA DE CAPTURA Y ALMACENAMIENTO DE LAS SEÑALES ECG
DE ROEDORES PARA SER UTILIZADOS EN LA INVESTIGACIÓN
MÉDICA.
Autor(a): Br. Bareño Angulo, Marco Julio
Tutor(a): Ing. María Alejandra Mora
Cabudare, Abril 2011.

iii
UNIVERSIDAD YACAMBÚ
VICERECTORADO ACADÉMICO
FACULTAD DE INGENIERÍA
SISTEMA DE CAPTURA Y ALMACENAMIENTO DE LAS SEÑALES ECG
DE ROEDORES PARA SER UTILIZADOS EN LA INVESTIGACIÓN
MÉDICA.
Trabajo presentado como requisito parcial para optar al grado de ingeniero
electrónico en computación.
Autor(a): Br. Bareño Angulo, Marco Julio
Tutor(a): Ing. María Alejandra Mora
Cabudare, Abril 2011.

iv
ACTA DE APROBACIÓN DEL TUTOR
En mi carácter de Tutor del Trabajo de Grado titulado SISTEMA DE
CAPTURA Y ANÁLISIS DE LAS SEÑALES ECG DE ROEDORES PARA
SER UTILIZADOS EN INVESTIGACIÓN MÉDICA presentado por el bachiller
Marco Julio Bareño Angulo, titular de la Cédula de Identidad N° V-16.531.664, para
optar al título de Ingeniero Electrónico en Computación, considero que dicho trabajo
reúne los requisitos y méritos suficientes para ser sometido a la presentación pública
y evaluación par parte del Jurado Examinador que se designe.
En la ciudad de Cabudare, ______ de abril de 2011.
Ing. María Alejandra Mora
C.I. V- 13.965.692

v
DECLARACION DE AUTORIA
Quien suscribe, Marco julio Bareño Angulo, titular de la cedula de Identidad No.
16531664, hace constar que es el autor del trabajo de grado, titulado: SISTEMA DE
CAPTURA Y ALMACENAMIENTO DE LAS SEÑALES ECG DE
ROEDORES PARA SER UTILIZADOS EN INVESTIGACIÓN MÉDICA, el
cual constituye una elaboración personal realizada únicamente con la dirección del
tutor de dicho trabajo, Ing. María Alejandra Mora, En tal sentido, manifiesto la
originalidad de la conceptualización del trabajo, interpretación de los datos y la
elaboración de las conclusiones, dejando establecido que aquellos aportes
intelectuales de otros autores se han referenciado debidamente en el texto del mismo.
En la ciudad de Cabudare, ______ de abril del año dos mil once (2011)
Marco Julio Bareño Angulo
C.I. 16531664

vi
DEDICATORIA
Primero que todo a Dios todo poderosos por permitirme venir a este mundo y
llenarme de todas las personas que me rodean. Mi Dios eres como el sol para un
ciego, que aunque no pueda verlo puede sentir su calor y toda su fuerza.
Quisiera dedicar este trabajo de grado especialmente a mi sobrino Carlito sin
“s” como es él, que me enseño que la palabra adiós en realidad es un hasta luego
camuflajeado y de tiempo indefinido, que la carne la marchita el tiempo pero que los
recuerdos son eternos en nuestros corazones, que una persona puede mover al mundo
180 grados aun teniendo 4 años y que definitivamente cuando un niño toma tu
meñique por primera vez para que lo pasees un rato mientras se duerme en verdad
está tomando tu mano para toda la vida. Eres el súper héroe de todos nosotros y como
tal sé que me cuidaste y ayudaste a completar esta meta. Gracias súper héroe bojo.
A mis padres Tito Julio Bareño y Mirna Angulo que siempre me brindaron
todo su apoyo y dedicación incondicional me enseñaron que ser padres es para toda la
vida además para toda la vida también su amistad confianza y amor.
A mi tía Mariela por depositar en mi tantas cosas buenas y por cuidarme
siempre como si aun tibiera un año, tía madrina eres mi segunda mama aquí en este
mundo sin ninguna discusión.
A mis hermanos la Nena, Irene y Alejandro que siempre estuvieron brindado
su apoyo y recibiendo los tropiezos que se reciben a lo largo de la carrera.
A mi pana Amado Castro le dedico este logro, a él y a su familia, este título es
para los dos mi pana, lo comparto contigo así como tu compartiste algo tan
importante conmigo, parte de tu vida.
Y por último a todos los profesores que me permitieron tener el honor de
compartir con ellos durante este ciclo de aprendizaje y que estoy seguro es un
felicidad para ellos cada vez que uno de sus alumnos lo completa.

vii
AGRADECIMIENTOS
Primero que todo a Dios sobre todas las cosas por brindarme las herramientas
necesarias para lograr este reto, sobre todo las herramientas espirituales, por
fortalecerme con cada una de las pruebas que puso en mi camino y por las que sigue
poniendo. A la divina pastora ya que cada vez que la veo me llena de cosas buenas y
de energía como a una copa vacía.
Una vez alcance a leer en un libro y un pensador muy importante dijo “Si he
logrado ver más allá que otros hombres es porque he estado parado sobre los hombros
de dos gigantes”. Para mi estos gigantes son mis familiares y amigos muchas gracias
por todas las cosas buenas que me han brindado.
A mis padres Tito Julio Bareño Marín y a Mirna Coromoto Angulo de Bareño
por darme el don de la vida y permitirme vivirla de la mejor manera posible
llenándome de sus enseñanzas y experiencias.
A mis hermanos Mirla, Alejandro e Irene por compartir conmigo la vida junto
a mis padres, también a mi prima Mariela Ines que es como otra hermana para todos
nosotros y a todos mis familiares que siempre estuvieron aportando su granito de
arena de forma desinteresada, simplemente apoyo de familia.
A todos mis amigos los de la universidad y los de la vida, en especial a mi
amiga Yanmari Cardinale que siempre fue la luz de emergencia cuando todo quedaba
a obscuras y el combustible de reserva cuando a mi motor no le quedaba más, muchas
gracias por ayudarme tanto, por tanto tiempo que me dedicaste y tanto apoyo que me
brindaste y que a pesar de todos mis tropiezos siempre fuiste la que me dijo “no
importa levántate y sigue intentando por arriba por debajo por la izquierda o por la
derecha”. A mis amigos de la infancia Juan Antonio Cubero, Alba Bailoni, Juan Jose
Cubero, Hernan Ran, Gabriel Bravo, Juan Carlo Gimenez, Armando Cheng, Manuel
Bernal, Armando “El Father” Martinez y Joeli Suares. Si mis hermanos son los
amigos que Dios escogió para mi, mis amigos son los hermanos que escogí por mí
mismo, no muchas personas pueden contar a sus amigos en una sola mano, gracias
por permitirme ser uno de esos pocos.

viii
A mis amigos de la universidad que me ayudaron a completar mi carrera con
su apoyo, explicaciones, comidas, colas, copiar clases entre otras cosas, porque el que
diga que hizo su carrera universitaria solo y sin ayuda de nadie, simplemente estudio
para político, no hay otra explicación. Quiero agradecerle a Fernando Gutierrez,
Rafael Caldera, Fabiola Alcala, Fernando Vera, Albis Nieves, Alvenis Nieves, Victor
Guillen, Edixon Vargas, Froilan Rivero, David Gintoli “El papa”, Nestor Bracale,
Omar Rincon, Manuel Gonzalo y todos aquellos que conocí a lo largo de la carrera y
me disculpan si omití alguno pero tengo la dicha de decir que eran muchos y no me
llegan todos en este momento, muchas gracias.

ix
INDICE GENERAL
Pág.
ACTA DE APROBACION DEL TUTOR……………………….. III
DECLARACION DE AUTORIA………………………..………..
DEDICATORIA……………………………………………………
AGRADECIMIENTOS....................................................................
IV
V
VI
ÍNDICE GENERAL………………….……………………………. VII
LISTA DE GRÁFICO……………………………………………... VIII
LISTA DE CUADROS……………………………………….……. IX
RESUMEN…………………………………………………………. X
INTRODUCCIÓN…………………………………………………. 1
OBJETIVOS………………………………………………………... 4
ESTUDIOS PREVIOS……………………………………………... 5
REVISIÓN DOCUMENTAL Y ELECTRÓNICA………………. 8
Electrodo……………………………………………………… 8
Animales de laboratorio………………………………………. 8
Roedor……………………………………………………… 8
Ratas Sprague Dawley……………………………………… 9
Electrocardiograma………………………………………….. 10
Ondas ECG……………………………………………..….. 11
Onda P…………………………..………………………….. 12
Onda Q………………………..……………………………. 13
Onda R………………………………………….………….. 14
Onda S…………………………..………………………….. 15
Intervalo PR…………………………………..……………. 18
Intervalo QT……………………………………………….. 18
Segmento ST……………………………………………….. 19
Derivaciones…………………………………………………. 20
Amplificador de instrumentación…………………………….. 21
Filtro pasa banda…………………………………………….. 22

x
Filtro notch………………………………………………….. 23
Microcontrolador……………………………………………. 25
Reloj de tiempo real DS1307……………………………………. 25
Lenguaje de programación……………………............................ 26
Protocolo I2C………………………………………………… 27
Transmisión serial………………………………………………. 28
Transmisión asíncrona………….................................................. 29
Transmisión síncrona…………….............................................. 29
Puerto serial……………..…………………………………… 31
TL-082……………………………………………………….. 33
TL-084……….……………………………………………….. 34
LF-353 y LF-347……………………………………………….. 34
Fotoplestimografia………………………………………………. 35
Frecuencia cardiaca………………….......................................... 35
DESARROLLO DEL TRABAJO DE GRADO……………………. 36
Diagrama modular……………………………………………… 37
Módulo de adquisición no invasivo……………………………… 37
Módulo selector de derivaciones……………………………….. 38
Módulo de adquisición de la señal……….…………………….. 41
Módulo de fotopletismografía…………………………………. 47
Módulo I2C…………………….……………………………… 49
Módulo de Memoria………………...…………………………. 51
Módulo de tiempo……………………………………………… 52
Módulo de control…………………………………………… 54
Módulo de la comunicación…………………………………… 56
Módulo de la programación…………………………………… 58
Módulo de alimentación………………………………………. 62
CONCLUSIÓN……………………………………………………… 65
RECOMENDACIONES…………………………………………. 66
REFERENCIAS………………………………………………….. 67

xi
ANEXO………………….…………………………………………… 70
LISTA DE GRÁFICOS
GRÁFICO Pág.
1 Ratas Sprague Dawley………………………………………… 10
2 Ondas del ECG, y las distintas formas………………………… 12
3 Onda P…………………………………………………………… 13
4 Onda Q………………………………………………………….. 14
5 Onda R………………………………………………………….. 14
6 Ondas S………………………………………………………….. 15
7 Onda T………………………………………………………….. 16
8 Intervalo PR……………………………………………………. 17
9 Intervalo QRS…………………………………………………… 18
10 Intervalo PP…………………………………………………………… 18
11 Intervalo QT……………………………………………………. 19
12 Taquicardia Sinusal……………………………………………. 19
13 INA-126………………………………………………………… 22
14 Filtro pasa banda………………………………………………… 23
15 Filtro pasa banda………………………………………………… 24
16 DS1307 …………………………………………………………... 26
17 Diagrama de bus I2C ………………………………………… 28
18 iFT232………………………………………………………… 32
19 Esquemático del iFT232……………………………………… 33
20 Integrado TL-082………………………………………………. 33
21 Integrado TL-084……………………………………………….. 34
22 Integrado LF-353 y LF-347……………………………………. 35
23 Diagrama modular ………………………………………………. 37
24 Multiplexor 4052……………………………………………. 39
25 Multiplexor 4052……………………………………………… 40

xii
26 Multiplexor 4052………………………………………………... 40
27 Etapa amplificador de instrumentación……………………… 43
28 Etapa filtro pasa banda ………………………………………… 44
29 Etapa filtro notch ………………………………………………. 45
30 Etapa amplificador……………………………………………….. 46
31 Esquema AT24C512……………………………………..……… 51
32 Esquema DS1307…………………………………………………. 53
33 Esquema Modulo de control ……………………………………. 55
34 Esquema IFT232……………………………………………….. 57
35 Diagrama de flujo de bajo nivel ………………………………… 59
36 Diagrama de flujo de alto nivel ………………………………… 61
37 Esquema Alimentación..……...………………………………… 62
38 Integración de los módulos………………..…………………… 63
xiii
LISTA DE CUADROS
CUADRO Pág.,
1 Pruebas y resultado del módulo de adquisición no invasivo………………. 38
2 Pruebas y resultado del módulo selector de derivaciones…………………. 41
3 Pruebas y resultado del módulo de adquisición de la señal……………….. 47
4 Pruebas y resultado del módulo I2C……………………………………… 50
5 Pruebas y resultado del módulo de memoria………………………………. 52
6 Pruebas y resultado del módulo reloj……….……………………………… 53
7 Pruebas y resultado del módulo de control & modulo de interfaz usuario… 56
8 Pruebas y resultado del módulo de Comunicación………………………… 57

xiv
UNIVERSIDAD YACAMBÚ
VICERRECTORADO ACADÉMICO
FACULTAD DE INGENIERÍA
Línea de investigación: Tecnologías en el área de la salud.
SISTEMA DE CAPTURA Y ALMACENAMIENTO DE LAS SEÑALES ECG
DE ROEDORES PARA SER UTILIZADOS EN LA INVESTIGACIÓN
MÉDICA
Autor: Marco julio Bareño Angulo.
Tutor: Ing. María Alejandra Mora.
Año: Abril de 2011.
RESUMEN
Este trabajo tiene como propósito la construcción y diseño de un dispositivo
capaz de tomar las señales electrocardiográficas de ratas de la cepa Sprague Dawley
utilizadas en la investigación médica y graficarlas. El prototipo es un sistema portátil
que puede operar sin estar conectado al PC, los datos se almacenaran en una memoria
a la espera de ser descargados y graficados por el PC. De igual forma se puede
adquirir la señal al estar conectado al PC y se graficara de igual forma.
La conexión con el PC es vía USB, lo que hace la conexión posible con casi
cualquier computador sin la necesidad de utilizar otro tipo de periféricos más
especializados y que necesitan de una configuración mas especifica, solo hace falta
instalar los controladores.
Para la captura de la señal de los animales, se construyó una jaula especializada
que gracias a su diseño acomoda al roedor de tal forma que sus patas mantendrán
siempre contacto con los sensores a pesar de los posibles movimientos del animal.
Descriptores: Rata Sprague Dawley, electrocardiograma no invasivo,
graficacion de señales ECG, derivaciones bipolares.

1
INTRODUCCIÓN
El desarrollo de una sociedad está íntimamente relacionado con la calidad de
vida que esta les pueda proveer a sus miembros. Esta calidad de vida está
condicionada por varios factores como lo son: las fuentes de alimentos, las fuentes de
trabajo, espacios de recreación, pero sin duda, el más importante de todos es el sector
de la salud.
En la actualidad los avances que se obtienen en la salud, han dado pie al
desarrollo de vacunas, de tratamientos preventivos y curas para enfermedades que
antes eran una sentencia de muerte, de hecho hoy en día hay muchas enfermedades
que están extintas y cepas de virus que solo viven en laboratorios para experimentar
con ellas y que hace 100 años eran la principal causa de muerte. Todo esto se traduce
en que la expectativa de vida es superior a la de hace algunos años y que a medida
que estos avances persisten, esta expectativa seguirá avanzando.
Todas estas mejoras se deben a la investigación biomédica, la misma se basa en
animales como sujetos de prueba para el desarrollo de drogas, fármacos y
tratamientos que se encuentran en etapa de prueba antes de probar su efectividad en
humanos, el problema y dilema con el que se enfrenta esta importante rama de la
medicina es que al momento de realizar sus experimentos en animales, estos corren el
riesgo de resultar lastimados o incluso perecer en el experimento, lo que ha dado pie a
que surjan grupos de activistas por los derechos de los animales que proponen
abiertamente eliminar o en su defecto reducir drásticamente la experimentación con
animales.
En el estado Lara también se cuenta con un departamento dedicado a la
investigación biomédica, este se encuentra a cargo de La Universidad Centro
Occidental Lisandro Alvarado (UCLA), bajo el nombre de Departamento de
Bioquímica. En este departamento constantemente se están desarrollando
experimentos para probar nuevas drogas y fármacos y como sujetos de prueba se usan
animales.

2
Casi de forma exclusiva los animales usados por el departamento de bioquímica
para sus experimentos son las ratas de tipo “Sprague Dawley”, las que comúnmente
son llamadas, ratas de laboratorio. Estas son usadas debido a la ventaja que presentan
sobre otros especímenes, su fácil manipulación, fácil mantenimiento, inteligencia y
estados de ánimo estable son algunas de estas características, además todos estos
especímenes son proporcionados por el Instituto Venezolano de Investigaciones
Científicas (IVIC), es ahí donde los roedores son criados bajo las más estrictas
normas, haciéndolos ideales para cualquier experimento dentro del campo de la
investigación médica.
Uno de los experimentos más comunes y de mayor importancia para el
desarrollo de nuevos medicamentos, consiste en probar fármacos en las ratas y luego
monitorear su señal cardiaca para ver el efecto y las reacciones de dichos fármacos en
los animales. El monitoreo de la señal cardiaca se realiza mediante el uso de un
electrocardiógrafo de uso veterinario, usando una técnica de tipo invasiva, la
efectividad de este proceso no se cuestiona; sin embargo, presenta problemas, uno de
estos es que la vida del animal no tiene ninguna garantía, esto supone no solo la
pérdida del espécimen y su necesaria reposición sino también una acumulación de
desechos orgánicos ya que por ser considerado material de riesgo biológico, no se
puede desechar fácilmente sino que debe pasar por ciertos protocolos de higiene y
seguridad. Otro inconveniente seria que los electrodos usados son de tipo aguja, estos
son insertados directamente en el corazón del animal para obtener la señal, lo que
condiciona el experimento a que se debe anestesiar a el animal antes de tomar su
señal cardiaca, a pesar de que se usa una tabla para anestesiarlo dependiendo de su
peso y edad, no desaparece por completo el riesgo de que los resultados obtenidos se
vean afectados por la anestesia usada para tranquilizar a el animal.
Los resultados arrojados tendrán un grado de confiablidad mucho mayor ya
que se garantiza que se está analizando la señal que emite el roedor bajo los únicos
efectos de la sustancia que se está probando y no de alguna otra como podrían ser
tranquilizantes y anestésicos.

3
También reducirá el tiempo empleado para la captura y análisis de la señal de
los animales debido a que solo seria inyectar la sustancia a analizar y colocar el
roedor en la plataforma, sin necesidad de anestesiarlo para luego hacer las incisiones
necesarias para poder colocar los electrodos tipo aguja en el corazón del animal, lo
que permitirá que se analicen y tomen una mayor cantidad de muestras, lo que es muy
útil en los experimentos controlados.
El prototipo está orientado a capturar las señales de ratones de laboratorio
solamente, no contempla otros animales a pesar de que hay una gran variedad de
especies que se usan en la investigación médica.

4
OBJETIVOS
General
Desarrollar un sistema de captura y almacenamiento de las señales ECG de
roedores para ser utilizados en investigación médica.
Específicos
Diseñar una jaula adaptada especialmente para el roedor y que permita tomar la
señal cardiaca del animal de forma no invasiva.
Diseñar un circuito capaz de alternar entre las distintas señales emitidas por las
extremidades del roedor con el fin de obtener las tres derivaciones bipolares.
Implementar una etapa de acondicionamiento capaz de adecuar y depurar la
señal proveniente de los electrodos para obtener la señal cardiaca del roedor.
Desarrollar un dispositivo para que el usuario interactúe con el sistema cuando
el mismo no esté conectado al PC.
Implementar una etapa de comunicación y control entre el sistema de captura de
las señales y entre el Software de alto nivel contenido en el PC.
Elaborar un software de alto nivel que pueda controlar el dispositivo desde el
computador y graficar las señales obtenidas.
Implementar un sistema de alimentación que satisfaga las necesidades
energéticas del sistema.
Diseñar un módulo para fotopletismografía capaz de mostrar las pulsaciones
por minuto del roedor de forma no invasiva.

5
ESTUDIOS PREVIOS
A continuación se presentan trabajos desarrollados con anterioridad que
guardan relación con este proyecto, que permiten obtener una visión más amplia de la
investigación.
Díaz (2007), en su trabajo de grado titulado Sistema De Monitoreo Cardiaco
Por Telemetría diseñó y construyó módulos portátiles que permitían monitorear las
funciones cardíacas de pacientes, utilizando para la transmisión de los datos la
telemetría. Cada módulo permitía mostrar en el monitor de un computador la señal
del electrocardiograma de cada paciente conectado, con el fin de monitorear su
corazón mientras se ejercita. Para ello utilizó el módulo ECG CSN 601, con sus
respectivos electrodos que fueron conectados al paciente, con el objeto de obtener las
señales del corazón. La transmisión de los datos la realizó vía Bluetooth. De este
trabajo resulta interesante la trasmisión de los datos que posteriormente serían usados
por el software de alto nivel, además del uso de las tarjetas ECG CSN 601 que
mandan dentro de su protocolo los datos de frecuencia cardiaca y el ST el cual indica
el estado del paciente en cuanto al estado de su arritmia cardiaca.
Por otro lado, Castaño (2008) realizó un estudio utilizando ratas, que luego
pudo ser dirigido para la creación de fármacos en seres humanos. Su titulo es: Caja
de Motilidad para el Estudio de Ansiedad en Ratas Sprague Dawley, y se basa en
poder contar el número de movimientos que realiza el animal de un cuadro a otro y el
número de veces que éste se alza con la finalidad de estudiar el comportamiento de la
rata producto del suministro de una enfermedad o droga. Está dirigido a todos
aquellos centros de investigación como universidades dedicados al descubrimiento de
nuevos fármacos, los cuales han sido probados anteriormente en ratas, para luego ser
procesados y aplicados en seres humanos. Es un equipo de bajo costo económico ya
que sus componentes son nacionales y el material de la caja es madera, la cual es de
fácil acceso; además, logra resultados óptimos reduciendo los niveles de error en el
experimento. Las variables objeto de estudio fueron: posición de la rata en la caja,
número total de movimientos realizado por la rata y número total de alzadas realizado

6
por la rata. De aquí resulta útil la caja de motilidad, la cual contiene al roedor,
también de éste trabajo se pueden obtener importantes aportes en la parte de
monitoreo del animal y de los sensores que se usaron para tal fin.
En el mismo orden de ideas Moreno crea un sistema de monitoreo de la presión
arterial de varias personas a través de la mensajería de texto, utilizando un sensor de
presión arterial (ASIC), que posee la propiedad de que por cada medición puede
censar tanto la presión sistólica, diastólica y presión media. Cabe destacar que hizo
uso del PIC16F877, además de otros componentes para realizar las operaciones de
medición y envío de los datos. A simple vista se observa que este antecedente es de
gran aporte para el trabajo a plantear ya que se realiza la transmisión de una variable
médica. La investigación presentada contribuirá al trabajo de grado a realizar por
cuanto crea un sistema de monitoreo de la presión arterial donde cada medición puede
censar tanto la presión sistólica, diastólica y presión media. Su trabajo se tituló:
Sistema de Monitoreo de Presión Arterial por Medio de Mensajes de Textos.
Finalmente, otro estudio relacionado con el monitoreo de señales en el cuerpo
humano es el de Giménez (2007), cuyo trabajo de grado se titulo Dispositivo
Electrónico Inteligente para la Medición de la Fuerza Cardiaca a Través del
Computador. Tal estudio estaba conformado por dos partes, la primera por el
microcontrolador PIC16F877; así como circuitos encargados de tomar la señal
proveniente de tres electrodos instalados en el pecho del paciente, que luego la
amplificaban y la llevaban a los niveles de trabajo del microcontrolador; una vez
obtenida la señal el microcontrolador se encargaba de procesarla y enviarla al
computador; igualmente se encargaba de aumentar o disminuir la velocidad de una
trotadora de acuerdo a los datos que recibía desde la maquina. Para la obtención de la
señal se implementó un bioamplificador con amplificadores operacionales TL082. Y
la segunda consistía en un software de alto nivel elaborado en DELPHI, debido a que
tiene la característica de procesar señales en tiempo real, se tomaban los datos
provenientes del PIC16F8777 desde el puerto serial, los graficaba y almacenaba junto
a los datos del paciente en una base de datos, una vez finalizada la prueba se procedía
a analizar los datos obtenidos para determinar un posible diagnostico. De este estudio

7
es un importante aporte la parte del bioamplificador ya que las señales que se tomarán
de los roedores son muy débiles y tienen mucho ruido, también resulta muy útil el
módulo donde se regula la velocidad de una trotadora externa de acuerdo a lo que
diga el módulo de control así como también el software que usa debido a que es
capaz de procesar datos en tiempo real, además del modo que maneja el
microcontrolador PIC16F877 que es el mismo utilizado en el prototipo.
Todos los trabajos nombrados anteriormente, aportan importantes bases
teóricas para así, llevar un desarrollo ordenado y sustentado del prototipo. A su vez
sirven de guía para la utilización de diferentes componentes electrónicos.

8
REVISIÓN DOCUMENTAL Y ELECTRÓNICA
Para llevar a cabo el estudio, es necesario tener claros los conceptos y toda la
terminología manejada en esta investigación, así como es necesario revisar las teorías
y explicaciones que sirven como fundamento, para experimentar con cada uno de los
elementos que hace posible el logro de los objetivos.
Electrodos
Existen muchos tipos de electrodos y por ende muchas definiciones para estos
dependiendo de su utilización y uso, pero de una forma muy general y según el
contenido de naturaleza educativa (2011), un electrodo es, un conductor eléctrico a
través del cual puede entrar o salir una corriente eléctrica en un medio, ya sea una
disolución electrolítica, un sólido, un gas, un cuerpo o el vacío. Otra definición
orientada más hacia la parte médica es la que nos ofrece página de HHMI (Howard
Hughes Medical Institute), Fino conductor aislado, excepto en su extremo, que está
ubicado ya sea cerca o dentro de una célula nerviosa. Puede registrar las señales
generadas por la actividad eléctrica de las células o puede ser usado para estimular la
actividad de las células.
Animales de laboratorio
Según Nomura, del Instituto Central de Animales de Laboratorio en Kawasaki
(Japón): "El animal de laboratorio definido es aquel que, primero; es engendrado y
producido en condiciones controladas, segundo; mantenido en un entorno controlado,
tercero; que posee claros antecedentes genéticos y microbiológicos y cuarto; que
existe una comprobación sistemática de estos antecedentes".
Roedor
El orden Rodentia ha sido el más exitoso de todas las ramas de mamíferos.
Actualmente hay entre 2000 y 3000 especies de roedores. Se reconocen fácilmente
por la presencia de un único par de incisivos superiores de crecimiento continuo con

9
una gruesa capa de esmalte en la parte delantera. Los machos poseen un hueso
peneano y las hembras útero doble. Incluye familias tan conocidas como ardillas,
ardillas voladoras, marmotas, castores, ratones con abazones, hamsters, lemmings,
ratones, ratas.
Ratas Sprague Dawley
Entre los animales utilizados para experimentos de laboratorios los roedores
son los más usados por las particulares características que estos ofrecen. Dentro de
los roedores existe una cepa en particular que es especial para el tipo de experimentos
desarrollados dentro de las instalaciones del departamento de bioquímica de la UCLA
y estas son las conocidas como ratas Sprague Dawley. Según la pagina web de la
universidad de costa rica en la división de laboratorio biológico, La rata Sprague
Dawley, es de usos múltiples, utilizada ampliamente en la investigación médica. Su
principal ventaja es su tranquilidad y facilidad de manejo. Esta cepa de rata fue la
primera producida por las Granjas Sprague Dawley (más tarde para convertirse en
Compañía de Animales Sprague Dawley) en Madison, Wisconsin. Las instalaciones
de cría de los especímenes se adquirieron por primera vez por Gibco y luego por
Harlan (ahora Harlan Sprague Dawley) en enero de 1980.
El tamaño promedio de la camada de la rata Sprague Dawley es de 10,5. El peso
corporal de adultos es de 250-300g para las hembras, y 450-520g para los machos. La
vida útil típica es 2,5-3,5 años. Estas ratas suelen tener mayor relación de cola para la
longitud del cuerpo en comparación con otras cepas de rata.

10
Grafico 01, Ratas Sprague Dawley
http://lebi.ucr.ac.cr/images/stories/gal7/ib_p010_0_13.jpg
Electrocardiograma
La Electrocardiografía o electrocardiograma, no es más que un procedimiento
diagnóstico con el que se obtiene un registro de la actividad eléctrica del corazón. Los
primeros estudios sobre la corriente eléctrica que se origina en el corazón datan de
finales del siglo XIX, y se basaban en la utilización de un electrómetro capilar. Pero
no fue hasta principios del siglo XX cuando el médico holandés Willem Windhoven
desarrolló el galvanómetro de cuerda o alambre, impulsando, de esta manera, el
desarrollo de la electrocardiografía. El electrocardiógrafo consta de un galvanómetro,
un sistema de amplificación y otro de registro. Las contracciones rítmicas del corazón
están controladas por una serie ordenada de descargas eléctricas que se originan en el
nodo sinusal de la aurícula derecha y se propagan a los ventrículos a través del nodo
aurícula ventricular y del haz de His (un haz de fibras neuromusculares). Mediante
electrodos aplicados en varias regiones del cuerpo se puede obtener, tras
amplificarlas, un registro de estas descargas eléctricas (transmitidas por los tejidos
corporales desde el corazón hasta la piel). Este registro se llama electrocardiograma
(ECG). La aguja del galvanómetro sólo se desplaza hacia arriba o hacia abajo.

11
Cuando la corriente eléctrica que está registrando un electrodo va en la
dirección del mismo, lo que se registra en el electrocardiograma es una onda positiva,
es decir un desplazamiento de la aguja del galvanómetro hacia arriba; por el
contrario, si lo que está registrando el electrodo es una corriente eléctrica que se aleja
de él, lo que se obtendrá en el registro es una onda negativa, por el trazado que
origina la aguja del galvanómetro al desplazarse hacia abajo.
El electrocardiograma es el registro gráfico de las variaciones de potencial
eléctrico de la actividad del corazón (fibras miocárdicas), en un tiempo determinado.
Estas variaciones se captan con los electrodos a nivel de la superficie de la piel, y a
través de los conductores llega al electrocardiógrafo que mide las potenciales de
acción del corazón y lo registra.
Afirma Magdalena (2006), que un electrocardiograma es un procedimiento
sencillo y rápido que registra la actividad eléctrica del corazón. Se utiliza para medir
el ritmo y la regularidad de los latidos, así como el tamaño y posición de las aurículas
y ventrículos, cualquier daño al corazón y los efectos que sobre él tienen las drogas.
El ECG es frecuentemente usado en el diagnóstico de las enfermedades
cardiacas congénitas de los niños. El electrocardiograma normal del neonato presenta
algunas diferencias respecto al del adulto.
Ondas ECG
Es una señal de respuesta a una técnica no invasiva con el propósito de realizar
exploraciones en el sistema cardiovascular humano. Está compuesto de un conjunto
de formas de onda que resultan de la despolarización y re polarización auricular y
ventricular e indica la conducción de impulsos eléctricos a través del corazón, con el
tiempo en abscisas y la tensión eléctrica en ordenadas, mediadas en milisegundos y
milivoltios, respectivamente. La amplitud (mV) de una señal ECG, está entre 0.02-
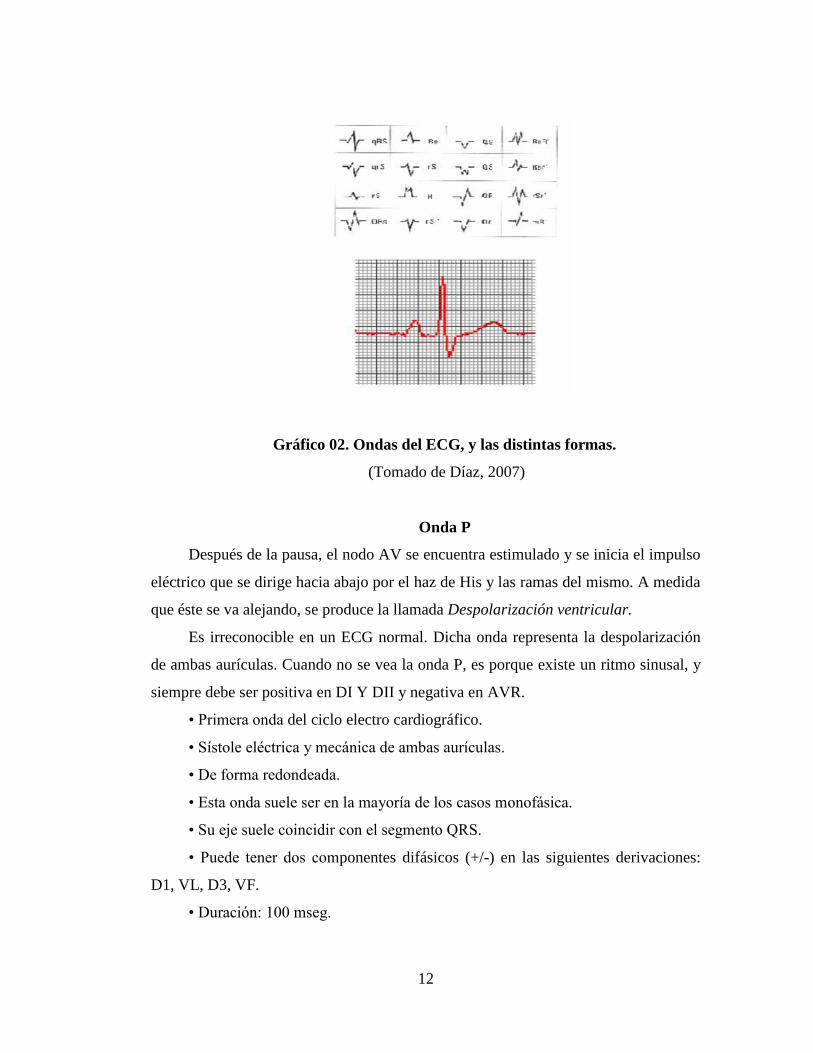
5.0, y su rango de frecuencia (Hz) debe estar entre 0.05-100. Específicamente, en un
ECG se reconocen tres componentes elementales: las ondas P, QRS y T, como se
muestra en la Grafico 2.
12
Gráfico 02. Ondas del ECG, y las distintas formas.
(Tomado de Díaz, 2007)
Onda P
Después de la pausa, el nodo AV se encuentra estimulado y se inicia el impulso
eléctrico que se dirige hacia abajo por el haz de His y las ramas del mismo. A medida
que éste se va alejando, se produce la llamada Despolarización ventricular.
Es irreconocible en un ECG normal. Dicha onda representa la despolarización
de ambas aurículas. Cuando no se vea la onda P, es porque existe un ritmo sinusal, y
siempre debe ser positiva en DI Y DII y negativa en AVR.
• Primera onda del ciclo electro cardiográfico.
• Sístole eléctrica y mecánica de ambas aurículas.
• De forma redondeada.
• Esta onda suele ser en la mayoría de los casos monofásica.
• Su eje suele coincidir con el segmento QRS.
• Puede tener dos componentes difásicos (+/-) en las siguientes derivaciones:
D1, VL, D3, VF.
• Duración: 100 mseg.

13
• Voltaje: 2,5 mV.
• Al crecer una cavidad Aumenta el voltaje y su duración varía en función de su
eje. Ver grafico 3.
Grafico 03. Onda P.
(Tomado de Díaz, 2007)
Onda Q
Es la deflexión negativa inicial resultante de la despolarización ventricular, que
precede una onda R.
• Anchura en las derivaciones D1, aVL, V5 y V6 no superior a 40 mseg.
• Está vinculada a la necrosis miocárdica.
• A menudo esta onda suele no visualizarse en el ECG, cuando existe siempre
es la primera en el complejo QRS. Ver gráfico 3.

14
Gráfico 04. Onda Q.
Departamento de Ciencias Fisiológicas (Tomado de Díaz, 2007)
Onda R
Es la primera deflexión positiva durante la despolarización ventricular. Voltaje
entre 6-8mmV, como máximo 25mmV (casos excepcionales). TDI: Tiempo de
medición intrínseco de este tiempo es el resultado que se encuentra entre Zenir
(principio de R) y Nadir (final de R). - En la derivación V5 el TDI ≤ 45mseg. Ver
gráfico 5.
Gráfico 05. Onda R.
(Tomado de Díaz, 2007)

15
Onda S
Es la segunda deflexión negativa durante la despolarización ventricular.
Características de esta onda:
• No siempre presente.
• En las precordiales derechas: se detecta la onda S cuando se produce el
alejamiento del gran vector del ventrículo izquierdo. En V5, y V6: el resultado de los
terceros vectores de las porciones cardíacas pósterobasales. Ver gráfico 06.
Grafico 06. Ondas S.
(Tomado de Díaz, 2007)
Onda T
Es la deflexión lenta producida por la repolarización ventricular.
• Deflexión positiva o negativa, se dibuja suavemente tras el segmento ST.
• Repolarización ventricular, de modo que se le pueda volver a estimular.
• Inscripción más lenta y asimétrica.
• Es positiva en las derivaciones D1, D2, VL, a VF, V3, V6. 15
• Negativa en las derivaciones de V1 a V4.
• Esta onda aparece al final del segmento ST.
• Posee una polaridad positiva en todas las derivaciones. Aunque surgen
excepciones en las derivaciones VR, V1 y D3. Ver gráfico 7.

16
Grafico 07. Onda T.
(Tomado de Díaz, 2007)
Onda U
Pequeña deflexión positiva obtenida tras la onda T.
• Inscripción de pequeño voltaje.
• Deflexión de muy bajo voltaje.
• Misma polaridad que onda T, pero sólo en las derivaciones de D4 y D5.
• La amplitud de dicha onda suele ser de 0.3.2mm
Intervalo PR
Características relevantes:
• Isoeléctria entre el final de P e inicio de QRS.
• El trazado de este segmento debe superponerse a la línea isoléctrica.
• Inicio de la actividad auricular hasta la despolarización ventricular.
• Al final de la Onda P existe un período de inactividad eléctrica, este período
representa el retraso fisiológico sufrido por el estimulo hasta que llega al nodo AV.
• Duración: entre 120 y 220mseg. Ver gráfico 8.

17
Grafico 08. Intervalo PR.
(Tomado de Díaz, 2007)
Intervalos QRS
Contracción ventricular. Características relevantes.
• Despolarización ventricular, es decir, Sístole eléctrica.
• Se pueden añadir dos conceptos más:
Corazón vertical: AQRS está situado a 90 C.
Corazón horizontal: AQRS a más de 0 C.
• Impulso eléctrico que se aleja del nodo AV y pasa a fibras de Purkinje y a las
células del miocardio. Éstas fibras, transmite el impulso eléctrico a las células del
miocardio, produciendo la contracción simultánea de los ventrículos.
• Se produce la actividad eléctrica que conlleva a la estimulación de los
ventrículos.
• En este intervalo se produce una inflexión de mayor voltaje.
• La duración de este intervalo es de 60 y 100 mseg.
• El eje AQRS varía ampliándose con la edad.
• Recién nacido: Duración menor. Oscilación +120 C.
• Ancianos: Duración mayor. Oscilación -10 C.
• Adulto-joven: Oscilación entre +40 C y 60 C. Ver gráfico 9

18
Grafico 09. Intervalo QRS.
(Tomado de Díaz, 2007)
Intervalos PP
Distancias entre dos ondas P sucesivas, si el ritmo es regular debe medir los
mismos que el intervalo RR. Ver gráfico 10.
Grafico #10. Intervalo PP.
(Tomado de Díaz, 2007)
Intervalo QT
Distancias desde el inicio de la onda Q hasta el final de la onda T, mide la
actividad eléctrica ventricular. El QT varia con la frecuencia cardíaca y por eso debe
ser corregido, valor normal de 350 – 400msg. Ver gráfico 11.

19
Grafico 11. Intervalo QT.
(Tomado de Díaz, 2007)
Segmento ST
Pausa producida después de QRS.
• Deflexión positiva, negativa e isoeléctrica que une QRS con la onda.
Se muestran cambios en la repolarización de la taquicardia. Para saber cómo
podemos medir el segmento ST. Ver grafico 12.
Gráfico 12. Taquicardia Sinusal.
Tomadas del Departamento de Ciencias Fisiológicas (Díaz, 2007)
.
• Nivelado de la línea isoeléctrica:
- Suele supradesnivelarse con la bradicardia y la vagotonía.
- Sufre un declive en el nivel, es decir, se infradesnivela con la
taquicardia.

20
• Aumentos de 2mm ó inferiores a 1mm en relación a la isoeléctrica, esto suele
darse por trastornos isoquémicos miocárdicos.
• Desde el final del complejo QRS (punto J) hasta el inicio e onda T.
• Medida del ST, según el desplazamiento de J con respecto a la línea
isoeléctrica.
Derivaciones
La curva electrocardiográfica presenta distintas morfologías dependiendo del
lugar dónde se coloque el electrodo explorador; estos lugares corresponden a las
distintas derivaciones. Las ondas ECG son la expresión de la despolarización y
repolarización del corazón y pueden ser tanto como positivas o negativas
dependiendo de si el electrodo explorador (situado en las distintas derivaciones) está
en la cabeza o la cola del vector de despolarización o repolarización.
Como el corazón es un órgano tridimensional, es necesario conocer la
proyección de los vectores representativos de la actividad eléctrica en dos planos,
frontal y horizontal, para asegurarse del camino que siguen, es por ello que se deben
obtener distintos ángulos, los cuales permiten conocer los detalles y la orientación de
las fuerzas eléctricas generadas por el corazón; estos diferentes ángulos corresponden
a las diferentes derivaciones.
Así, en el ECG convencional se utilizan derivaciones del plano frontal que son
tres bipolares, las cuales recogen la actividad eléctrica entre dos puntos del cuerpo
humano (D1, D2, D3 o I, II y III), tres monopolares, que recogen la actividad
eléctrica entre un punto del cuerpo humano y un punto llamado cero que está en el
centro del corazón (VR, VL y VF), y derivaciones del plano horizontal, que son seis
derivaciones monopolares (V1 a V6). Todas las derivaciones tienen una parte
positiva, que es donde está ubicado el electrodo explorador, y una negativa. En otras
palabras, se puede considerar que a cada derivación le corresponde una línea de
derivación, que va desde el lugar donde está ubicada la derivación hasta la zona
opuesta, pasando por el centro del corazón.
Cada una de las líneas de derivación se divide en dos mitades: la positiva, que
es la próxima al polo positivo (lugar desde donde se registran las fuerzas eléctricas) y

21
la negativa, que es la próxima al polo negativo (lugar opuesto al polo positivo). Se
puede considerar que el límite de las dos mitades es el centro del corazón.
Amplificador de instrumentación
Un amplificador de instrumentación es un dispositivo creado a partir de
amplificadores operacionales. Está diseñado para tener una alta impedancia de
entrada y un alto rechazo al modo común (CMRR). La operación que realiza es la
resta de sus dos entradas multiplicada por un factor. Su utilización es común en
aparatos que trabajan con señales muy débiles, tales como equipos médicos (por
ejemplo, el electrocardiograma), para minimizar el error de medida.
El INA126 es un amplificador de instrumentación de precisión para la
adquisición precisa, tiene un bajo nivel de ruido en el diferencial de la señal de
adquisición. El diseño de sus dos amplificadores operacionales proporciona un
excelente desempeño con muy bajas corrientes parasitas (175μA/channel). Esto,
combinado con un amplio rango de voltaje de funcionamiento de ± 1.35V a ± 18V,
los hace ideal para sistemas de instrumentación de adquisición de datos. La ganancia
se puede ajustar desde 5 V / V para 10000V / V con una sola resistencia externa. Sus
circuitos de entrada proporcionan una baja tensión de offset (250μV max) y un
excelente rechazo de modo común. La ganancia viene dada por la siguiente fórmula,
𝐺 = 5 +80kΩ
Rg

22
Grafico 13. INA-126
(Tomada del manual del fabricante 2011)
Filtro pasa banda
Un filtro pasa banda es un filtro que posee dos frecuencias de corte, llámense f1 y
f2, este tipo de filtro solo dejara pasar las frecuencias que estén comprendidas en este
rango, y las demás las rechazara, en la grafico 14 puede apreciarse el grafico muestra
el comportamiento de este tipo de filtros. Al principio, los filtros estaban compuestos
únicamente por elementos pasivos, es decir, resistencias, condensadores e
inductancias. Sin embargo, la aparición del amplificador operacional ha traído
consigo una mejora notable en la fabricación de los filtros, ya que se ha podido
prescindir de las inductancias. La mejora conseguida con el cambio de inductancias
por amplificadores operacionales es apreciable en lo que se refiere a respuesta,
aprovechamiento de la energía (menor disipación), tamaño y peso, ya que las
inductancias no se pueden integrar en un circuito y, por tanto, son elementos discretos
con un tamaño considerable.

23
Grafico 14. Filtro pasa banda
Filtro Notch
Un filtro notch, o filtro rechaza banda, o filtro elimina banda, es un tipo de filtro
cuya función es eliminar las señales que estén comprendidas entre sus frecuencias de
corte. Pueden implementarse de diversas formas. Una de ellas consistirá en dos filtros,
uno paso bajo cuya frecuencia de corte sea la inferior del filtro elimina banda y otro
paso alto cuya frecuencia de corte sea la superior del filtro elimina banda. Como
ambos son sistemas lineales e invariantes, la respuesta en frecuencia de un filtro banda
eliminada se puede obtener como la suma de la respuesta paso bajo y la respuesta paso
alto (hay que tener en cuenta que ambas respuestas no deben estar solapadas para que
el filtro elimine la banda que interese suprimir), ello se implementará mediante un
sumador analógico, hecho habitualmente con un amplificador operacional.
Ver gráfico 15.

24
Grafico 15. Filtro pasa banda
Filtro pasa bajo
Un filtro pasa bajo corresponde a un filtro caracterizado por permitir el paso de
las frecuencias más bajas y atenuar las frecuencias más altas. El filtro requiere de dos
terminales de entrada y dos de salida, de una caja negra, también denominada
cuadripolo o bipuerto, así todas las frecuencias se pueden presentar a la entrada, pero a
la salida solo estarán presentes las que permita pasar el filtro. De la teoría se obtiene
que los filtros están caracterizados por sus funciones de transferencia, así cualquier
configuración de elementos activos o pasivos que consigan cierta función de
transferencia serán considerados un filtro de cierto tipo.

25
Microcontrolador
Según Microchip Technology Incorporated (2011), se denomina
microcontrolador a un dispositivo programable capaz de realizar diferentes
actividades que requieran del procesamiento de datos digitales y del control y
comunicación digital de diferentes dispositivos.
Los microcontroladores poseen una memoria interna que almacena dos tipos de
datos; las instrucciones, que corresponden al programa que se ejecuta, y los registros,
es decir, los datos que el usuario maneja, así como registros especiales para el control
de las diferentes funciones del microcontrolador.
Los microcontroladores se programan en Assembler y cada microcontrolador
varía su conjunto de instrucciones de acuerdo a su fabricante y modelo. De acuerdo al
número de instrucciones que el microcontrolador maneja se le denomina de
arquitectura RISC (reducido) o CISC (complejo).
Los microcontroladores poseen principalmente una ALU (Unidad Lógico
Aritmética), memoria del programa, memoria de registros, y pines I/O (entrada y/0
salida). La ALU es la encargada de procesar los datos dependiendo de las
instrucciones que se ejecuten (ADD, OR, AND), mientras que los pines son los que
se encargan de comunicar al microcontrolador con el medio externo; la función de los
pines puede ser de transmisión de datos, alimentación de corriente para el
funcionamiento de este o pines de control específico.
Reloj de tiempo real DS1307
Es un reloj de tiempo real exacto, el cual automáticamente, mantiene el tiempo
y la fecha actual, incluyendo compensación para meses con menos de 31 días y saltos
de año. El DS1307 es un dispositivo de 8 pines al que se le conecta un cristal de
cuarzo estándar, de bajo costo, a 32.768kHz entre los pines 1 y 2 para proveer tiempo
base exacto. Opcionalmente se le puede conectar al pin3, baterías de respaldo de 3
voltios, asegurando que se mantendrá el tiempo a la fecha aunque esté desconectada
la fuente de tensión del circuito principal. El circuito integrado automáticamente

26
detecta que se ha removido la energía en el circuito principal y se conectan las
baterías de respaldo cuando es requerido.
Posee un muy bajo consumo de energía, cuando el circuito trabaja en modo
batería, en condiciones normales de temperatura y humedad, esta podría durar hasta
10 años. Ver grafico 17
Grafico 16 DS1307
Lenguaje de programación
Un lenguaje de programación es un lenguaje que puede ser utilizado para
controlar el comportamiento de una máquina, particularmente una computadora.
Consiste en un conjunto de símbolos y reglas sintácticas y semánticas que definen su
estructura y el significado de sus elementos y expresiones.
Un lenguaje de programación permite a uno o más programadores especificar
de manera precisa sobre qué datos una computadora debe operar, cómo deben ser
estos almacenados y transmitidos y qué acciones debe tomar bajo una variada gama
de circunstancias. Todo esto, a través de un lenguaje que intenta estar relativamente
próximo al lenguaje humano o natural, tal como sucede con el lenguaje léxico. Una
característica relevante de los lenguajes de programación es precisamente que más de
un programador puedan tener un conjunto común de instrucciones que puedan ser
comprendidas entre ellos para realizar la construcción del programa de forma
colaborativa.

27
Los procesadores usados en las computadoras son capaces de entender y actuar
según lo indican programas escritos en un lenguaje fijo llamado lenguaje de máquina.
Todo programa escrito en otro lenguaje puede ser ejecutado de dos maneras:
• Mediante un programa que va adaptando las instrucciones conforme son
encontradas. A este proceso se lo llama interpretar y a los programas que lo hacen se
los conoce como intérpretes.
• Traduciendo este programa al programa equivalente escrito en lenguaje de
máquina. A ese proceso se lo llama compilar y al traductor se lo conoce como
compilador.
Protocolo I2C
Es un estándar que facilita la comunicación entre microcontroladores, memorias
y otros dispositivos con cierto nivel de "inteligencia", sólo requiere de dos líneas de
señal y un común o masa. Fue diseñado por Philips y permite el intercambio de
información entre muchos dispositivos a una velocidad aceptable, de unos 100 Kbits
por segundo, aunque hay casos especiales en los que el reloj llega hasta los 3,4 MHz.
La metodología de comunicación de datos del bus I2C es en serie y
sincrónica. Una de las señales del bus marca el tiempo (pulsos de reloj) y la otra se
utiliza para intercambiar datos.
SCL es la línea de los pulsos de reloj que sincronizan el sistema.
SDA es la línea por la que se mueven los datos entre los dispositivos.
GND común de la interconexión entre todos los dispositivos
"enganchados" al bus.
Las líneas SDA y SCL son del tipo drenaje abierto, es decir, un estado similar
al de colector abierto, pero asociadas a un transistor de efecto de campo (o FET). Se
deben polarizar en estado alto (conectando a la alimentación por medio de resistores
"pull-up") lo que define una estructura de bus que permite conectar en paralelo
múltiples entradas y salidas.
Las dos líneas del bus están en un nivel lógico alto cuando están inactivas. En

28
principio, el número de dispositivos que se puede conectar al bus no tiene límites,
aunque hay que observar que la capacidad máxima sumada de todos los dispositivos
no supere los 400 pF. El valor de los resistores de polarización no es muy crítico, y
puede ir desde 1K8 (1.800 ohms) a 47K (47.000 ohms). Un valor menor de
resistencia incrementa el consumo de los integrados pero disminuye la sensibilidad al
ruido y mejora el tiempo de los flancos de subida y bajada de las señales. Los valores
más comunes en uso son entre 1K8 y 10K.
Grafico #17 Diagrama de bus I2C
Transmisión serial
El concepto de transmisión serial es sencillo. El puerto serial envía y recibe
bytes de información, un bit a la vez. Aún y cuando esto es más lento que la
comunicación en paralelo, que permite la transmisión de un byte completo por vez,
este método de comunicación es más sencillo y puede alcanzar mayores distancias.
Por ejemplo, la especificación IEEE 488 para la comunicación en paralelo
determina que el largo del cable para el equipo no puede ser mayor a 20 metros, con
no más de 2 metros entre cualesquier dos dispositivos; por el otro lado, utilizando
comunicación serial el largo del cable puede llegar a los 1200 metros. Esto se afirma
en http://redesvelez.tripod.com/tserial.htm. En este caso, los n bits que componen un
mensaje se transmiten uno detrás de otro por la misma línea.
A la salida de una máquina, los datos en paralelo se convierten los datos en
serie, los mismos se transmiten y luego en el receptor tiene lugar el proceso inverso,

29
volviéndose a obtener los datos en paralelo. La secuencia de bits transmitidos es por
orden de peso creciente y generalmente el último bit es de paridad.
En aspecto fundamental de la transmisión serie es el sincronismo,
entendiéndose como tal al procedimiento mediante el cual, transmisor y receptor
reconocen los ceros y unos de los bits de igual forma.
El sincronismo puede tenerse a nivel de bit, de byte o de bloque, donde en cada
caso se identifica el inicio y finalización de los mismos. Dentro de la transmisión
serial existen dos formas:
Transmisión asíncrona
Es también conocida como Star/stop. Requiere de una señal que identifique el
inicio del carácter y a la misma se la denomina bit de arranque. También se requiere
de otra señal denominada señal de parada que indica la finalización del carácter o
bloque.
Generalmente cuando no hay transmisión, una línea se encuentra en un nivel
alto. Tanto el transmisor como el receptor, saben cuál es la cantidad de bits que
componen el carácter. Los bits de parada son una manera de fijar qué delimita la
cantidad de bits del carácter y cuando se transmite un conjunto de caracteres, luego de
los bits de parada, existe un bit de arranque entre los distintos caracteres.
A pesar de ser una forma comúnmente utilizada, la desventaja de la transmisión
asincrónica es su bajo rendimiento, como en los casos en que el carácter tenga 7 bits
ya que para efectuar la transmisión se requieren 10. O sea que del total de bits
transmitidos sólo el 70% pertenecen a datos.
Transmisión síncrona
En este tipo de transmisión es necesario que el transmisor y el receptor utilicen
la misma frecuencia de clock (reloj interno de los dispositivos con esta
características) en ese caso la transmisión se efectúa en Bloques, debiéndose definir
dos grupos de bits denominados delimitadores, mediante los cuales se indica el inicio
y el fin de cada bloque.

30
Este método es más efectivo por que el flujo de información ocurre en forma
uniforme, con lo cual es posible lograr velocidades de transmisión más altas. Para
lograr el sincronismo, el transmisor envía una señal de inicio de transmisión mediante
la cual se activa el clock del receptor. A partir de dicho instante, transmisor y receptor
se encuentran sincronizados.
Otra forma de lograr el sincronismo es mediante la utilización de códigos auto
sincronizantes, los cuales permiten identificar el inicio y el fin de cada bit. En los
canales de comunicación existen tres tipos de transmisión.
Simples
En este caso el transmisor y el receptor están perfectamente definidos y la
comunicación es unidireccional. Este tipo de comunicaciones se emplean usualmente
en redes de radiodifusión, donde los receptores no necesitan enviar ningún tipo de
dato al transmisor.
Dúplex o Semi-duplex
En este caso, ambos extremos del sistema de comunicación cumplen funciones
de transmisor y receptor y los datos se desplazan en ambos sentidos pero no
simultáneamente. Este tipo de comunicación se utiliza habitualmente en la interacción
entre terminales y un computador central.
Full Dúplex
El sistema es similar al dúplex, pero los datos se desplazan en ambos sentidos
simultáneamente. Para ello, ambos transmisores poseen diferentes frecuencias de
transmisión o dos caminos de comunicación separados, mientras que la comunicación
semi-duplex necesita normalmente uno solo. Para el intercambio de datos entre
computadores este tipo de comunicaciones son más eficientes que las transmisiones
semi-duplex.

31
Puerto serial
Un puerto serie es una interfaz de comunicaciones entre ordenadores y
periféricos en donde la información es transmitida bit a bit enviando un sólo bit a la
vez, en contraste con el puerto paralelo que envía varios bits a la vez entre el puerto
serie y el puerto paralelo.
En los PC hay conectivos DB9 macho, de 9 pines, por el que se conectan los
dispositivos al puerto serie. Los conectores hembra que se enchufan tienen una
colocación de pines diferente, de manera que se conectan el pin 1 del macho con el
pin 1 del hembra, el pin2 con el 2, etc.
IFT232
El convertidor iFT232 es un convertidor de bus USB a puerto SERIAL RS232
con niveles de tensión TTL, el cual, puede ser utilizado en una gran cantidad de
aplicaciones junto a los microcontroladores PIC®, Atmel®, motorola®, Parallax™ y
cualquier otro fabricante de microcontroladores existentes en el mercado actual. Es
excelente a la hora de disponer de una conexión a puerto serial, sobre todo en la
actualidad que los computadores personales tipo portátiles no la tienen disponible.
Con el iFT232 se soluciona este problema, ya que, usted puede utilizar un puerto del
tipo USB desde su PC ya sea portátil y/o de escritorio y conectarlo directamente a
UART de su microcontrolador. La tarjeta iFT232 se comportará como un puerto
serial virtual RS232 tipo COM y usted podrá utilizar todos los recursos de
programación para puerto serial de los cuales usted dispone.
El convertidor iFT232 tiene dimensiones de 4.0 cm de longitud x 1.6 cm de
ancho, del tamaño de un PENDrive®, es una herramienta poderosa, sólida y bien
construida, pensada para resistir un trato duro y aún así brindar un acabado
profesional. En el grafico 12 podemos apreciar la vista frontal así como también la
vista posterior del iFT232, a continuación se da la descripción de dicho grafico.
1. Conector para puerto USB del iFT232 tipo B mini 5P.
2. LED indicador de Alimentación / TX de UART.
3. Conector estándar de 6 Polos 0.1” separación para conexión con protoboard.

32
Grafico #18. iFT232.
Características del iFT232
Se puede conecta de forma sencilla a cualquier protoboard para
trabajar con los PIC™.
Capacidad de generar un puerto virtual serial COM para
conexión al microcontrolador.
Interfaz serial estándar lista para conectar directamente al PC
No requiere fuente de poder externa, ya que, se alimenta de
propio puerto USB, puede suministrar hasta 300 ma máximos al PIC™
y a su circuitería externa.
Totalmente compatible con los compiladores de Microchip™,
MPLAB®, Mikroelectronika®, Proton®, MBASIC®, CCS® y
PBASIC® entre otros.

33
Grafico #19. Esquemático del iFT232.
Tomado de la documentación del fabricante (© ROSO Electric Supply)
TL-082
El TL-082 es un integrado que en su interior posee dos amplificadores
operacionales, los integrados pertenecientes a esta familia (TL-08) poseen entradas de
tipo JFET, esta es su principal característica pero las que destacan a esta familia de
integrados de otras con entradas JFET son las siguientes, posee un bajo consumo de
corriente, también cuenta con un amplio modo de rechazo común, también puede
trabajar con un amplio rango de voltajes diferenciales, tienen una alta impedancia de
entrada y una compensación interna de frecuencia, baja polarización de entrada y un
bajo nivel de corrientes de offset. Ver grafico #22
Grafico 20. Integrado TL-082
Autor: Marco Bareño 2011
34
TL-084
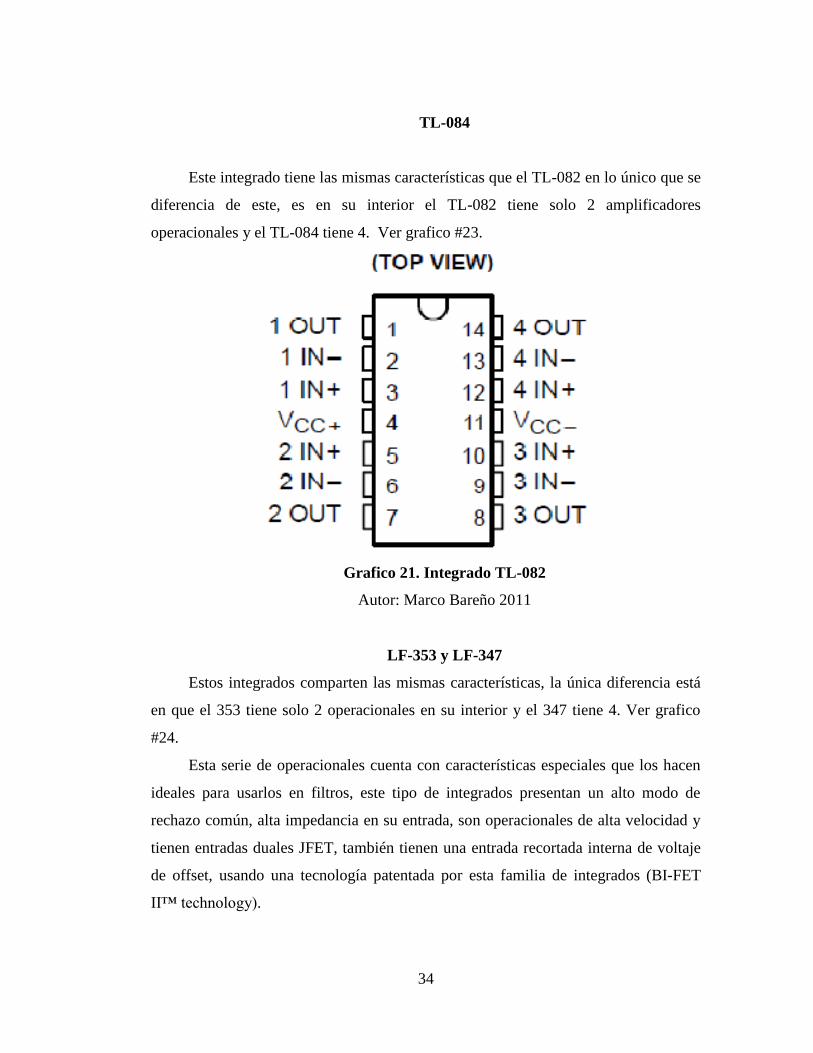
Este integrado tiene las mismas características que el TL-082 en lo único que se
diferencia de este, es en su interior el TL-082 tiene solo 2 amplificadores
operacionales y el TL-084 tiene 4. Ver grafico #23.
Grafico 21. Integrado TL-082
Autor: Marco Bareño 2011
LF-353 y LF-347
Estos integrados comparten las mismas características, la única diferencia está
en que el 353 tiene solo 2 operacionales en su interior y el 347 tiene 4. Ver grafico
#24.
Esta serie de operacionales cuenta con características especiales que los hacen
ideales para usarlos en filtros, este tipo de integrados presentan un alto modo de
rechazo común, alta impedancia en su entrada, son operacionales de alta velocidad y
tienen entradas duales JFET, también tienen una entrada recortada interna de voltaje
de offset, usando una tecnología patentada por esta familia de integrados (BI-FET
II™ technology).

35
Grafico #22. Integrado LF-353 y LF-347
Tomado del manual del fabricante.
Fotopletismografía
El fotopletismógrafo consta de un diodo que emite haces de luz infrarroja y
un foto-sensor. Como la sangre total es más obscura que el color rojo y cercana a la
luz infrarroja que rodea los tejidos, el grado en el cual el haz de luz se atenúa, es
proporcional a la cantidad de sangre presente.
Frecuencia Cardiaca
La frecuencia cardiaca se define como las veces que se late corazón por
unidad de tiempo. Normalmente se expresa en pulsaciones por minuto. Es un valor
muy importante en el deporte y la medicina ya que nos dice numéricamente,
objetivamente y rápidamente las adaptaciones al ejercicio o a la administración de
drogas y medicamentos que se están produciendo en el deportista o paciente.

36
Desarrollo del trabajo de grado
Debido a que investigaciones realizadas anteriormente han desarrollado
sistemas similares de captura y procesamiento de la señal ECG, también se han
desarrollado sistemas de monitoreo de de valores en animales de laboratorio tanto de
forma invasiva, como no invasiva.
Para llevar a cabo la realización de esta investigación se apoyo en un estudio
previo y de esta manera obtener las bases fundamentales para el diseño y
construcción del prototipo, esta se realizó a través de las siguientes búsquedas:
tutoriales en internet, investigaciones de estudios previos donde se extraen la
información más substancial para el progreso del trabajo; una vez recolectada toda la
información necesaria para el diseño del prototipo se pone en camino el plan de
desarrollo del proyecto.
Para el diseño del prototipo se realizó en módulos, donde cada uno de ellos
depende necesariamente uno del otro.

37
Diagrama modular
Grafico 23. Diagrama modular
Autor: Marco Bareño (2011)
Módulo de adquisición no invasivo
Esta etapa está conformada principalmente por el diseño de una caja especial
que contiene los sensores que tomarán las señales necesarias de cada una de las
extremidades del animal para después ser enviada a los módulos restantes y poder al
final de proceso armar la señal ECG. La jaula se diseñó de forma tal que el roedor al
entrar en la caja quedara inmóvil, dejándole como única opción posicionar sus patas
en cada uno de los sensores correspondiente para cada extremidad, así mismo la caja
cuenta con paneles móviles que en caso de ser necesarios se pueden ajustar alrededor
de la cola y del cuello del animal para inmovilizarlo por completo. Otra ventaja que
presenta la caja es que los sensores se pueden mover de arriba hacia abajo, esto con el
objetivo de ajustarse mejor a el punto donde el animal tenga más apoyadas sus
Amplificador de Instrumentación
Filtro pasa banda
Filtro Notch de 60Hz
Sumador de offset
TECLADO LCD
RELOJ MEMORIA
Software de alto nivel
Modulo de multiplexado

38
extremidades además de facilitar su manipulación para el mantenimiento que estos
puedan necesitar. Este sistema móvil también se hace muy útil a la hora de que el
tamaño de los especímenes varié mucho y sea necesario un ajuste para la correcta
toma de la señal del nuevo ejemplar.
Cuadro 1: Pruebas y resultado del módulo de adquisición no invasivo
Módulo de multiplexado
Las señales con las que se trabajara en este prototipo son las llamadas bipolares,
estas señales son tres, formadas cuando se combinan tres extremidades distintas al
momento de pasar por el amplificador de instrumentación. La primera derivación o
derivación I se forma con la pata izquierda delantera y pata derecha delantera, la
segunda derivación o derivación II la forman la pata derecha delantera y la pata
izquierda trasera y por último, la tercera derivación o derivación III la forma la
combinación de la pata izquierda delantera y la pata izquierda trasera, para todos los

39
casos, la pata derecha trasera es usada como referencia o tierra. Es esta etapa del
prototipo, la encargada de darle continuidad a la señal proveniente de cualquiera de
las extremidades del animal, para así obtener la derivación que este solicitando el
módulo de control.
Este módulo está formado principalmente por un multiplexor 4052, este tipo de
multiplexor es idóneo para esta tarea ya que posee varias entradas, ocho divididas en
2 grupos, por donde se introducirán las señales de las extremidades del animal y dos
salidas que irán después de ser seleccionadas por el módulo de control a la entrada del
amplificador de instrumentación, una a la entrada positiva y la otra a la negativa, este
es el comienzo de la etapa de adquisición de la señal. Otra de las razones para el uso
de este integrado es que posee 2 selectores para seleccionar la señal y que se pueden
controlar de forma digital escogiendo entre 4 posibles opciones. Ver grafico 26.
Además las entradas de este integrado procesan tanto señales analógicas como
digitales, al no poseer elementos como las bobinas que tiene un relé, generan menos
ruido, además de ser mas económica la implementación de estos ya que con solo un
integrado de pueden obtener las tres derivaciones.
Grafico 24. Multiplexor 4052 Autor: Marco Bareño 2011

40
Grafico 25. Multiplexor 4052
Autor: Marco Bareño 2011
Grafico 26. Multiplexor 4052
Autor: Marco Bareño 2011

41
Cuadro 2: Pruebas y resultado del módulo selector de derivaciones
Módulo de adquisición de la señal
Este es uno de los módulos más críticos e importantes del prototipo, si bien se
puede decir que el módulo de control es el cerebro, el mismo puede ser considerado
el corazón del proyecto. Es este módulo el encargado de finalmente recibir la señal
del roedor, ya que hasta este punto no se le ha dado ningún tipo de tratamiento,
adecuarla y acondicionarla para que pueda ser procesada por el modulo de control, la
calidad y exactitud de la señal depende casi por completo del mismo. Básicamente
consta de cuatro etapas, en la primera se encuentra el amplificador de
instrumentación, un amplificador especialmente diseñado para aplicaciones médicas,
en el irán conectadas por sus entradas positiva y negativa la señal previamente
seleccionada de las extremidades para obtener la derivación que se necesite. Luego le
sigue la segunda etapa formada por el filtro pasa banda, es este filtro el que dejará
PRUEBAS RESULTADOS
MÓDULO SELECTOR DE MULTIPLEXADO
•Se hizo un arreglo de distintos voltajes y señales y se colocaron en las entradas del 4052, luego se probaron las combinaciones de la tabla de la verdad, se alimentó el integrado con Vcc y tierra.
•Se repitió la prueba alimentando con Vcc, tierra y Vee mucho menor a tierra
•El cambio de los voltajes era el esperado según la tabla de la verdad sin embargo las señales que tenían una parte negativa se veían afectadas, distintas a sus correspondientes en las entradas.
•Las señales de las salidas fueron las esperadas.

42
pasar la banda de frecuencia en la que se encuentra la señal cardiaca de los roedores,
estudios y pruebas previas demuestran que estas señales se encuentran entre las
frecuencias de 0,05 Hz a 150Hz. Posteriormente se encuentra la tercera etapa,
formada por un filtro notch, este es un tipo de filtro rechaza banda pero que rechaza
de forma exclusiva los 60 Hz, esto con la intención de evitar el ruido proveniente de
todos los aparatos conectados a la red eléctrica y que pueden afectar a el diseño,
como por ejemplo las lámparas fluorescentes. Y por último se tiene la cuarta etapa,
formada por un último amplificador hecho a base de amplificadores operacionales,
este amplificador de encargará de amplificar una vez más la señal para hacerla más
adecuada para su posterior procesamiento por parte del microcontrolador, y además le
sumará un nivel DC a la señal para eliminar las componentes negativas que esta
pueda tener antes de entrar al módulo de control.
El amplificador de instrumentación lo forma un integrado llamado INA-126,
este cumple muy bien su función ya que posee una gran impedancia de entrada y una
pequeña corriente de polarización, también ofrece un amplio rango de voltajes
diferenciales así como un elevado modo de rechazo común lo que hace que el ruido
en las señales se atenúe aun más, pude amplificar hasta mil veces la señal con solo
variar una resistencia entre las patas 1 y 8.
Las señales provenientes de los multiplexores entrarán en los pines positivos y
negativos respectivamente, las veces que se amplificara la señal viene determinada
por la siguiente formula 𝐺 = 5 +80kΩ
Rg, por los pines 7 y 4 entraran los voltajes de
alimentación diferenciales, de 9v y -9v, el pin 5 es la referencia que para este caso irá
a tierra y el 6 la salida que será el inicio de la siguiente etapa.

43
Grafico #27. Etapa amplificador de instrumentación
Autor: Marco Bareño (2011)
Luego en la segunda etapa se tiene el filtro pasa banda, La señal obtenida se
ingresa al filtro pasa banda, lo que asegura que esté dentro de la banda especificada
por las normas médicas, que está entre los 0.05 Hz y 150 Hz. Estudios realizados
demuestran que señales arriba de 150 Hz, en el caso de los roedores, no son
cardiológicas y además, filtrando frecuencias menores de 0.05 Hz se elimina una
diferencia de potencial entre los electrodos y la superficie de la piel del animal que
alcanzan niveles de hasta 300mV y que pueden llegar a saturar los circuitos del
amplificador. Eliminando estas frecuencias se asegura una alta ganancia de la señal y
no del ruido.
En este circuito la resistencia R1 y el capacitor C1 actúan como filtro pasa altos
y el valor de estos elementos define la frecuencia de corte inferior (FL), de 0.05 Hz.
La expresión empleada para calcular estos valores es la siguiente: 𝐹𝐿 =1
2𝜋∗𝑅1∗𝐶1

44
La resistencia R2 y el capacitor C2 por el contrario, forman el filtro pasa bajo
requerido, definiendo la frecuencia de corte superior (FH) de 150Hz. Los valores de
R2 y C2 se encuentran a partir de la siguiente expresión: 𝐹𝐻 =1
2𝜋∗𝑅2∗𝐶2
La amplificación que obtiene la señal en esta etapa de filtrado, se la puede
calcular anulando los capacitores involucrados. Se puede realizar esta acción debido a
que en las frecuencias de operación el capacitor C2 es equivalente a un cortocircuito
y el capacitor C1 es equivalente a un circuito abierto. Entonces el circuito se reduce a
un amplificador no inversor cuya señal de salida se expresa de la siguiente manera:
𝑉𝑜𝑢𝑡 = 1 +𝑅2
𝑅1 ∗ 𝑉𝑖𝑛 Con este circuito además de restringir la banda de frecuencia
se amplifica aun más la señal.
Grafico #28. Etapa filtro pasa banda
Autor: Marco Bareño (2011)
En esta tercera etapa el filtro Notch. Se determina el rango de frecuencias para
la señal, lo que queda es ingresar esta señal a un filtro Notch, debido a que la

45
presencia del ruido en el registro de biopotenciales es prácticamente inevitable. Este
tipo de filtro se caracteriza por eliminar señales de una frecuencia específica. En este
proyecto se trata de eliminar el ruido inducido por la red eléctrica y demás aparatos
como luces, computadores, y otros dispositivos que funcionan con la red eléctrica
doméstica de 60Hz. Entonces se implementa el filtro Notch para una frecuencia de
60Hz, eliminando de esta manera las señales de ruido producidas por esta frecuencia
que distorsionan la señal electrocardiográfica.
En la grafico 4 se muestra el filtro Notch utilizado, en el cual el valor de R1 es
igual a R2; y el valor de RV1 es la mitad de estos. De la misma forma el valor de los
capacitores C1 y C2 es el mismo y el valor del capacitor C3 es la suma de C1 y C2.
La siguiente expresión determina el valor de la frecuencia que se desea eliminar:
𝐹𝑂 =1
2𝜋∗𝑅1∗𝐶2
Grafico 29. Etapa filtro notch
Autor: Marco Bareño (2011)
Por último la cuarta etapa, la señal obtenida hasta ahora necesita ser manipulada
para que alcance una amplitud comprendida entre 0v y 5v, para poder digitalizarla

46
con el ADC que posee el microcontrolador, que acepta como entrada sólo señales que
estén comprendidas entre esos valores. Esto se logra con un amplificador sumador
que se muestra en la figura #29. Se suma un voltaje DC se obtiene una señal positiva
con ganancia para asegurar que esté entre 0v y 5v.
Grafico #30. Etapa amplificador
Autor: Marco Bareño (2011)

47
Cuadro 3: Pruebas y resultado del módulo de adquisición de la señal.
Módulo de Fotopletismografía
Este módulo tiene como objetivo capturar de forma no invasiva la frecuencia
cardiaca del animal, definida en pulsaciones por minuto o PPM y mandarlas al
módulo de control para poder ser visualizadas en la pantalla LCD.
La justificación de esto es que hay veces en que los expertos quieren saber
las variaciones que ha tenido el animal en su frecuencia cardiaca después de que se
les suministró cierto fármaco
Este módulo se elaborará basándose en el principio de que la sangre al ser
atravesada por un haz de luz roja de alta intensidad, dependiendo del volumen de
esta, obscurece su color, estos cambios pueden ser entonces detectados por una foto
resistencia. El volumen de la sangre que pasa a través de una extremidad o de alguna
parte del cuerpo aumenta y disminuye en función del ritmo cardiaco. El módulo de
adquisición no invasiva cuenta con un led rojo de alta intensidad y de una foto
resistencia en el lado opuesto de este, estos dispositivos serán ubicados en un

48
mecanismo tipo pinza que rodee la pata del roedor. Las variaciones que detecte la
fotoresistencia irán a un comparador que tendrá un voltaje de referencia para
comparar las variaciones en la fotoresistencia, estas variaciones después pasarán por
una etapa de adecuación para ser llevadas a pulsos de 5 voltios en su estado alto y 0
voltios en su estado bajo para que puedan ser interpretados por el microcontrolador.

49
Módulo I2C
Este módulo está formado por todos aquellos integrados que trabajen con el
protocolo I2C que es un protocolo síncrono que trabaja con 2 hilos para varios
componentes, cada dispositivo que trabaje con este protocolo posee una dirección que
lo diferencia de los demás, es de esta forma como ellos por decirlo de una manera
escuchan la orden del maestro y en caso de que la orden coincida con alguno, será
este el que procesará y ejecutará la instrucción, algunos dispositivos tienen una
dirección determinada como el DS1307 pero en el caso de memorias en las cuales
pueden haber varias conectadas, vienen con un selector de direcciones que
llevándolos a tierra o Vcc pueden ser escogidos a conveniencia para diferenciarse
unas con otras. Con la implementación de este protocolo se pueden tener varios
componentes a dos líneas, estos componentes serán los esclavos y serán controlados
por un maestro que en este caso será el módulo de control. Algunas definiciones a
tener en cuenta son las siguientes:
SDA (System Data): Por la cual viajan los datos entre los dispositivos.
SCL (System Clock): Por la cual transitan los pulsos de reloj que
sincronizan el sistema.
GND (Masa): Interconectada entre todos los dispositivos "enganchados"
al bus.
Maestro (Master): Dispositivo que determina la temporización y la
dirección del tráfico de datos en el bus. Es el único que aplica los pulsos
de reloj en la línea SCL. Cuando se conectan varios dispositivos
maestros a un mismo bus la configuración obtenida se denomina "multi-
maestro".
Esclavo (Slave): Cualquier dispositivo conectado al bus incapaz de
generar pulsos de reloj. Reciben señales de comando y de reloj
proveniente del dispositivo maestro. Se pueden conectar hasta 128
dispositivos, que son los dispositivos seleccionados por el maestro
mediante 7 bits (dirección del esclavo)
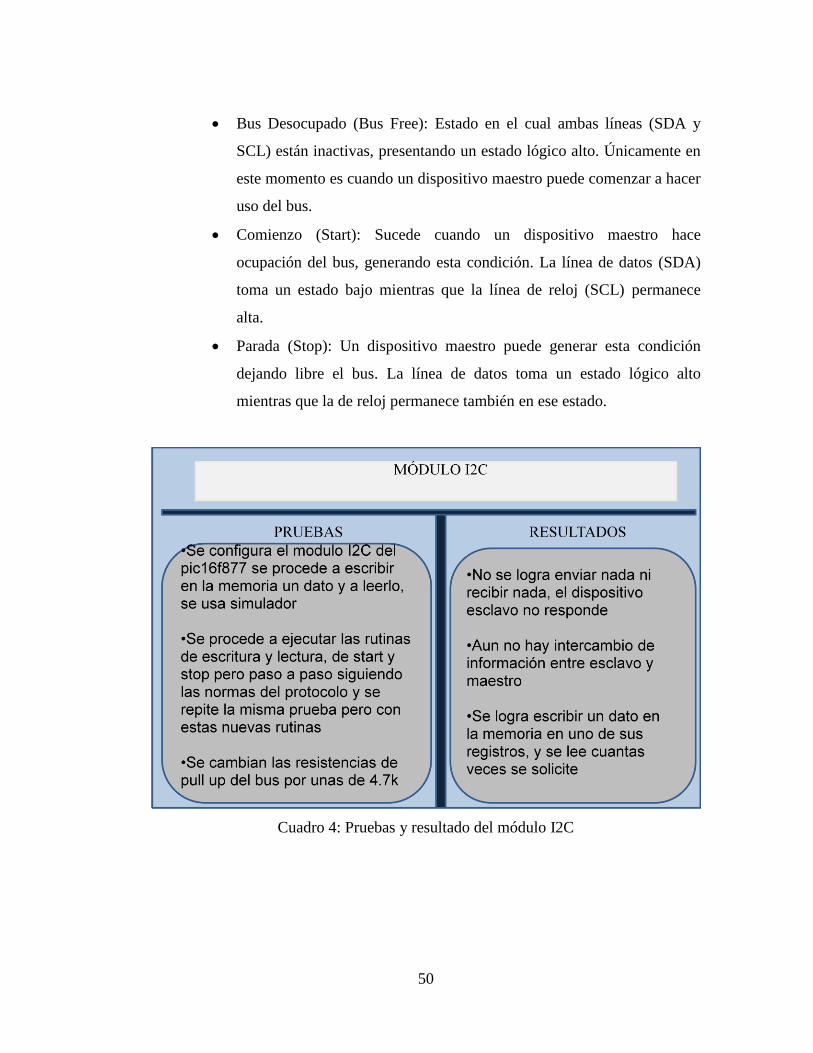
50
Bus Desocupado (Bus Free): Estado en el cual ambas líneas (SDA y
SCL) están inactivas, presentando un estado lógico alto. Únicamente en
este momento es cuando un dispositivo maestro puede comenzar a hacer
uso del bus.
Comienzo (Start): Sucede cuando un dispositivo maestro hace
ocupación del bus, generando esta condición. La línea de datos (SDA)
toma un estado bajo mientras que la línea de reloj (SCL) permanece
alta.
Parada (Stop): Un dispositivo maestro puede generar esta condición
dejando libre el bus. La línea de datos toma un estado lógico alto
mientras que la de reloj permanece también en ese estado.
Cuadro 4: Pruebas y resultado del módulo I2C

51
Módulo de memoria
Este módulo está conformado por una memoria serial de 512 bytes, el integrado
utilizado fue el AT24C512, la función de esta memoria es ir almacenado los datos
provenientes del roedor y que ya han sido tratados por el módulo de adquisición y
digitalizados y procesados por el módulo de control. El aporte de este modulo al
proyecto es que gracias a él para recibir los datos no sea necesario que el prototipo
esté conectado a la PC ya que en caso de no estar conectado este igual tomara los
datos de la señal pero los almacenara en la memoria para que posteriormente cuando
se conecte a la PC estos datos puedan ser descargados y graficados. Otra ventaja es
que en la ausencia de electricidad el sistema puede seguir trabajando con todos sus
componentes ya que tiene el uso baterías.
Grafico 31. Esquema AT24C512
Autor: Marco Bareño

52
Cuadro 5: Pruebas y resultado del módulo de memoria
Módulo de tiempo
Este módulo está formado por el integrado DS1307, que es un reloj en tiempo
real, este al igual que la memoria está conectado al bus I2C y es el encargado de
proporcionar la hora exacta a la que fue tomada la señal del roedor, este dispositivo
cuenta con una batería de 3.2V que en condiciones de temperatura y humedad
normales podría mantener funcionando al reloj hasta por 10 años consecutivos una
vez que se detecte la ausencia de alimentación, de igual manera para que la hora no
pierda exactitud el usuario mediante el alto nivel podrá sincronizar la hora de el reloj
de tiempo real con la hora del PC. La obtención de los datos de este integrado se hace
mediante el módulo de control, estos datos como la hora, minutos, segundos, mes, día
de la semana, año entre otros; se encuentran almacenados en registros del integrado y
que son solicitados mediante el módulo de control para posteriormente ser procesados
por este y enviados en la trama correspondiente junto con los datos de la señal tomada
del animal a la memoria o a el PC dependiendo del caso.

53
Grafico 32. Esquema DS1307
Cuadro 6: Pruebas y resultado del módulo reloj

54
Módulo de control
Este módulo está conformado principalmente por el microcontrolador
PIC18F4550, este módulo se encarga de digitalizar la señal proveniente del módulo
de adquisición, también este modulo es el encargado de enviar las ordenes necesarias
para que le modulo de selección de derivación haga los cambios necesarios para
obtener la derivación que se desea. También este módulo hace la función de maestro
para el control de los dispositivos que trabajan con el protocolo I2C, como lo son la
memoria y el reloj de tiempo real. De igual manera es el que hace el intercambio de
información entre el PC de forma síncrona mediante el estándar RS232 que usa el
dispositivo IFT232. Por otra parte en este modulo es donde se arman las tramas de
comunicación necesarias para enviar la información almacenada en la memoria,
cuando se trabaja desconectado de la PC, o la que se obtiene en tiempo real que es
cuando se cuenta con la PC y el software de alto nivel encargado de graficar y de
llevar un registro de la señal y del animal con el que se esté experimentando. De igual
forma controla la información que se visualiza en la LCD que es la comunicación con
el usuario en modo portátil y recibe del teclado la información que el usuario quiera
transmitirle al sistema en este mismo modo.

55
Grafico 33. Esquema Módulo de control

56
Cuadro 7: Pruebas y resultado del módulo de control & modulo de interfaz usuario
Módulo de comunicación
El módulo de comunicación es el que se encarga de establecer una interfaz
entre el módulo de control y la PC, para esto utiliza una comunicación síncrona
usando el estándar RS232 que es con el que trabaja el integrado IFT232, este
integrado se conecta mediante USB a cualquier puerto del PC y seguidamente
mediante un software que este trae incluido la PC lo reconoce como un puerto serial
virtual, por ejemplo el comm1. La comunicación con el microcontrolador del módulo
de control se lleva a cabo conectando los pines RX al TX del microcontrolador y el
TX al RX del microcontrolador.

57
Grafico 34. Esquema IFT232
Cuadro 8: Pruebas y resultado del módulo de Comunicación.

58
Módulo de programación
Diseño de software de bajo nivel
El software en bajo nivel está dividido en varios módulos diferentes los cuales
realizan el trabajo en forma descentralizada y así obtener mejor rendimiento de
procesamiento. La interfaz de usuario el programa se inicia cargando las variables y
registros y configurando los diferentes módulos periféricos del microcontrolador
como el USART y el convertidor analógico digital (ADC). Una vez cargado el
programa se verifica el modo de trabajo, el cual puede ser modo PC o modo teclado,
en el caso de ser el primer el microcontrolador se pone en modo recepción en su
puerto de comunicación serial síncrono y espera las instrucciones que el PC le envíe
por medio del software de alto nivel y usado tramas ajustadas a un protocolo de
comunicaciones previamente establecido. En este punto hay varias opciones y puede
ser que el usuario quera ajustar la hora del DS1307, en este caso con un botón de
envío se manda la hora que este cargada en el sistema, el microcontrolador procesa
esta trama y la carga en los registros correspondientes del DS1307. En caso de que se
quiera descargar la información almacenada en la memoria, luego de recibir la trama
se leen los datos escritos en la memoria serial y se envían a través del modulo de
comunicación a el PC. Otro caso sería que se reciba la trama de graficación, en este
caso se revisa la información contenida en la trama y en base a esto se selecciona la
derivación configurando el integrado 4052, se activa el ADC del microcontrolador y
se siguen enviando datos respetando la solicitud del usuario. El microcontrolador
estará escuchando hasta que se salga del modo PC que lo hará automáticamente al
cerrar el software de alto nivel o al presionar una de las teclas del teclado programada
para tal fin.
Por otra parte si se selecciona el modo teclado, aparecerán una serie de menús
en la LCD del sistema que guiarán al usuario a través de todas las funciones del
dispositivo, luego de que el usuario haya aceptado las opciones del menú se activara
el ADC del microcontrolador y se enviará esta información a la memoria acompañada
de la hora que se haya extraído del DS1307, luego el sistema regresará al inicio del
menú donde nuevamente se pregunta por el modo de trabajo.

59
Grafico # 35. Diagrama de flujo de bajo nivel

60
Diseño de software de alto nivel
Está compuesto por una interfaz, por medio del cual el usuario controla el
prototipo, esta interfaz se desarrolló en Visual Basic, que es el ambiente de desarrollo
de interfaz de usuario, el cual contiene herramientas para crear interfaces gráficas
para aplicaciones. Con este software se puede graficar en tiempo real así como
también graficar la información que este almacenada en la memoria serial del
sistema, además de mostrar las coordenadas de la gráfica en los ejes X y Y
respectivamente.
De una manera general este programa consta de un cuerpo principal, (la interfaz
antes mencionada) en donde se espera que ocurra un evento (acción por parte del
usuario) y de procedimientos que ejecutan las distintas acciones seleccionadas. Cabe
destacar que el cuerpo principal del programa está implícito dentro del lenguaje, ya
que, ésta es una de sus principales características, es un lenguaje orientado a eventos,
es decir, cuando no se está ejecutando ninguna acción, el programa está
aparentemente detenido, sin embargo, siempre está chequeando la ocurrencia de
cualquier evento, una vez que este ocurre, se enlaza con la rutina que ejecuta dicha
solicitud.
Inicialmente el programa inicia en su modo presentación, este despliega una
imagen para el usuario y dentro de esta dos frames que contienen las opciones
principales del programa donde el usuario podrá escoger de una forma más minuciosa
y presentable el modo en el que desea trabajar y adquirir la señal. En la opción
información, el usuario escogerá que derivación desea tomar, y el tiempo que desea
tomarla, así como también la opción de visualizar en tiempo real, en la parte de
configuración se encuentran las opciones de descargar y borrar memoria, así como
también sincronizar el reloj de tiempo real DS307 con la hora del equipo, esto debido
a el pequeño error que este presenta y que hace que cada cierto tiempo de atrase, cabe
destacar que todos los relojes se atrasan, la diferencia está en la frecuencia con la que
lo hacen.

61
Grafico 36. Diagrama de flujo de alto nivel

62
Módulo de Alimentación
El módulo de alimentación se construirá en base a una estructura la cual
soportará los elementos a ensamblar y los alimentará mediante el uso de baterías de 9
Voltios, estas estarán conectadas a un integrado llamado Regulador de Voltaje
LM7805 el cual tiene la función de regular el nivel de voltaje a 5 Voltios, en la salida
del LM7805 se conecta un condensador de 100nF que cumple la función de eliminar
ruidos indeseables lo cual es ideal para alimentar el microcontrolador y el resto de los
elementos electrónicos de este proyecto.
Grafico 37. Esquema Alimentación

63
Integración de los módulos
Grafico 38.
Autor: Marco Bareño (2011)
Este esquemático, que es el modelo final, es el resultado de varias pruebas
basadas en su mayoría en ensayo y error, en pruebas y resultados y la respectiva
corrección para obtener algún valor deseado, algunas de las pruebas y modificaciones
se describen a continuación.
La primera prueba que se efectúo fue la de conectar a la rata al sistema, el
resultado fue una señal muy pequeña en amplitud y con cierta componente de ruido,
para corregir esto se decidió amplificar aun más modificando la resistencia del
amplificador de instrumentación, el resultado de esto fue que la señal se amplificaba
junto con el ruido, esto es algo crítico y determinante en este tipo de sistemas. Luego
con la ayuda de un osciloscopio digital, el cual posee una función muy útil para este
tipo de pruebas y es la de mostrar mediante un grafico las componentes de frecuencia
que se encuentran presentes en la medición, y estas eran las de 60 Hz junto cónsul
armónicos, la solución para esto fue la de usar otro filtro notch para producir un notch
de segundo orden, luego de visualizar nuevamente la gráfica se aprecio que aun había
una fuerte componente de 60 Hz sin embargo luego de poner un tercer notch se pudo
X1
CRYSTAL
D7
14
D6
13
D5
12
D4
11
D3
10
D2
9D
18
D0
7
E6
RW
5R
S4
VS
S1
VD
D2
VE
E3
LCD1LM016L
R1
1k
1 2 3
4 5 6
7 8 9
0 #
1 2 3
A
B
C
D
KP1
MODDLL=KEYPAD
X2FREQ=32768Hz
D1R6
330
RA0/AN02
RA1/AN13
RA2/AN2/VREF-/CVREF4
RA3/AN3/VREF+5
RA4/T0CKI/C1OUT/RCV6
RA5/AN4/SS/LVDIN/C2OUT7
RA6/OSC2/CLKO14
OSC1/CLKI13
RB0/AN12/INT0/FLT0/SDI/SDA33
RB1/AN10/INT1/SCK/SCL34
RB2/AN8/INT2/VMO35
RB3/AN9/CCP2/VPO36
RB4/AN11/KBI0/CSSPP37
RB5/KBI1/PGM38
RB6/KBI2/PGC39
RB7/KBI3/PGD40
RC0/T1OSO/T1CKI15
RC1/T1OSI/CCP2/UOE16
RC2/CCP1/P1A17
VUSB18
RC4/D-/VM23
RC5/D+/VP24
RC6/TX/CK25
RC7/RX/DT/SDO26
RD0/SPP019
RD1/SPP120
RD2/SPP221
RD3/SPP322
RD4/SPP427
RD5/SPP5/P1B28
RD6/SPP6/P1C29
RD7/SPP7/P1D30
RE0/AN5/CK1SPP8
RE1/AN6/CK2SPP9
RE2/AN7/OESPP10
RE3/MCLR/VPP1
U10
PIC18F4550
VBAT3
X11
X22
SCL6
SDA5
SOUT7
U12
DS1307
BAT13V R5R7
SCL6
SDA5
WP7
A12
A01
U2
AT24C512
3
2
1
84
U4:A
LM358N
5
6
7
84
U4:B
LM358N
3
2
1
84
U5:A
LM358N
5
6
7
84
U5:B
LM358N
R8
100k
R1010k
C1220nF
1.0 LDR1LDR
C2
470nF
R1110k
R91k
C3
33uF
R12510k
R13
160k
C4470nF
R14
100k
R1510k
R16
22k
C51uF
R1747k
C61nF
R18
22k
R19
220k
R20
10k
D21N4733A
R21
1k
3
2
1
411
U1:A
LF347
5
6
7
411
U1:B
LF347
10
9
8
411
U1:C
LF347
U1:A(V+)
U1:C(V-)
PATA DELANERA IZQUIERDA
PATA TRASERA IZQUIERDA
PATA DELANTERA DERECHA
PATA TRASERA DERECHA
X012
X114
X215
X311
Y01
Y15
Y22
Y34
A10
B9
INH6
X13
Y3
U11
4052
3
2
RG18
RG21
4
7
6
REF5
U3
INA122
C7
470nF
C8
470nF
R225.6M
R235.6M
50%
RV110k
R24
5.1k
R25
10k
3
2
1
411
U6:A
LF347
C9
220nF
C10100nF
R26
12k
5
6
7
411
U6:B
LF347C11
470nF
R27
12k
C12
220nF
C13
220nF
R286.2k
R29
6.2k
10
9
8
411
U6:C
LF347C14
470nF
R30
6.2k
C15
220nF
C16
220nF
R313k
12
13
14
411
U6:D
LF347
R32
10k
R33
10k
R34
1k
R351k
D31N4148
D41N4148
D51N4148
R3610k
VI1
VO3
GN
D2
U77805
C173.3unF
C18100uF
D6
1N4148
D71N4148
R37
1.8k
Vdd
J1
J2
J3
J4
J5
R38
470
R3910k
C191nF
Vdd
Vdd
J6Tx
J7Rx
C20100nF

64
ver que se estaba sobre filtrando la señal ya que la redondeaba en sus picos, la posible
explicación a esto es que la superficie de contacto de las patas del roedor es
aproximadamente del 10% de la superficie total del sensor lo que produce que el resto
del sensor capte las señales electromagnéticas presentes en el ambiente, además de
esto juega en papel importante la baja intensidad de la señal del roedor en
comparación con otros mamíferos así como también el hecho que los sensores con los
que se contó tenían bastante tiempo de uso por lo que el materia conductivo que los
envolvía, un baño de plata, estaba prácticamente desprendido de estos, la solución
final fue implementar una caja de Faraday y conectar la superficie conductiva que la
envolvía a masa, esto bajo tanto la incidencia del ruido que se opto por eliminar el
último filtro notch y así se evitaba también el exceso de filtrado que modificaba la
señal.

65
Conclusiones
El desarrollo de este sistema permitió demostrar como la electrónica día a día se
va fusionando con otras ciencias y ramas de estudio para facilitar el trabajo de estas.
Cada vez se puede ver como la optimización y automatización de equipos y procesos
por parte de la electrónica, más que una comodidad se convierte en una necesidad
debido a las mejoras en cuanto precisión, manejo, disminución de costos,
disminución de tiempo para llevar a cabo una tarea e implementación de soluciones
que sin el aporte de la electrónica sería difícil por no decir imposible ejecutarlas.
Con un buen estudio sobre el comportamiento de los roedores en espacios
estrechos y un buen aprovechamiento, configuración y uso de los componentes que se
vieron en este trabajo de grado, es posible capturar una señal cardiaca muy precisa sin
necesidad de anestesiar a el animal o usar métodos que ponen la vida del animal en
riesgo.
Con el uso de métodos de adquisición no invasivos se evita la acumulación y
posible contaminación biológica producto de la muerte de los roedores, además se
evita la crítica y posible sanción por parte de grupos simpatizantes de los derechos de
los animales, que cada vez son más y más escuchados por la sociedad civil.
Con el uso del sistema implementado se logra capturar una señal cardiaca sin la
presencia de sustancias anestésicas como el pentobarbital que son capaces de viciar la
señal que se esté estudiando.
Se ha podido demostrar que la implementación de este sistema se puede
trabajar mejor con el animal, causando menos traumas como es la alteración de la
conducta que hace que el sistema nervioso trabaje de forma inadecuada, así como
también la recopilación de buena información sin incluir el error humano presente en
el experimento, debido a que ya no se necesita tener contacto directo con el animal.

66
Recomendaciones
Con el propósito de mejorar las funciones y las capacidades del prototipo, se
hacen las siguientes recomendaciones:
Rediseñar el la caja de adquisición no invasiva de tal forma que pueda ser
adaptada a otras especies que son usadas también para la experimentación medica.
Invertir en sensores nuevos sin desgaste y si es posible que esten hecho con
materiales mas conductivos como el oro, ya que la señal de este tipo de animales es
muy baja.
Se recomienda conectar sensores de presión, temperatura, de frecuencia
respiratoria para obtener unos resultados y reportes más completos sobre la
experimentación a realizar.
También se recomienda la utilización de un DSPIC para la implementación de
filtros auto regulables mediante el uso de transformadas de furrier.
Migrar el alto nivel a otro lenguaje de programación más robusto como Java,
para así aumentar sus funciones y capacidades, como podría ser que después de
capturar la señal se envíe a un servidor para ser revisada en cualquier momento por el
usuario vía internet.
Siguiendo la línea anterior se podría implementar un sistema experto para que
emita un diagnostico en base a la señal obtenida.

67
Referencias bibliográficas y electrónicas
Naturaleza educativa, portal educativo de ciencias naturales y aplicadas.
(2010). [Pagina web en línea]. Disponible:
http://www.natureduca.com/tecno_gloselec_e01.php
HHMI, portal glosario sentidos. (2010). [Pagina web en línea]. Disponible:
http://www.hhmi.org/senses-esp/popups/120.html
Nomura, T. (1987). Defined Laboratory Animals. Advances in Pharmacology
and Therapeutics II, 5, 325-333. Pergamon Press, Oxford and New York.
Universidad de Costa Rica, laboratorio de ensayos biológicos. (2010). [Pagina
web en línea]. Disponible:
http://lebi.ucr.ac.cr/index.php?option=com_content&view=article&id=43&Itemid=44
FIE, laboratorio de computación, facultad de ingeniería eléctrica. (2010).
[Pagina web en línea]. Disponible en:
http://lc.fie.umich.mx/~jrincon/apuntes%20intro%20PIC.pdf
Wikipedia la Enciclopedia Libre. (2008). [Pagina Web en Línea]. Disponible:
http://es.wikipedia.org/ [Consulta: 2008, Octubre]
UPEL (2006) Manual de trabajo de grado de especialización y maestría y tesis
doctorales. Vicerrectorado de investigación y postgrado. Caracas: FEDUPEL.
Díaz Chang, C. (2007). Sistema de monitoreo cardiaco por telemetría. Trabajo
de tesis de pregrado no publicado. Universidad Yacambú, Cabudare.
Castaño Barillas, F. (2008). Caja de motilidad para el estudio de ansiedad en
ratas Sprague Dawley. Trabajo de tesis de pregrado no publicado. Universidad
Yacambú, Cabudare
Giménez, A. (2007). Dispositivo electrónico inteligente para medición de
fuerza cardiaca a través del computador. Trabajo de tesis de pregrado no publicado.
Universidad Yacambú, Cabudare.
Guerrero, S. (2005). Sistema para estudio científico en roedores “Rota-Rod0”
con registro de datos en PC a través de interfaz RS_232. Trabajo de tesis de pregrado
no publicado. Universidad Yacambú, Cabudare.

68
Escuela politécnica superior de Alcoy, ingeniería técnica telecomunicación,
especialidad telemática (2005). Memoria 24LC512 con interfaz I2C
Coughlin, R. y Driscoll, F. (1999). Amplificadores operacionales y circuitos
lineales. Editorial Prentice May. México
Jose M. Angulo Uzcategui (2003). Microcontroladores PIC, diseño práctico de
aplicaciones.
Maritza Barrios Yaselli (2006). Manual de trabajos de grado de especialización
y maestría y tesis doctorales. Editorial FEDUPEL. Caracas, Venezuela
Medicina Deportiva (2001). Curso de Electrocardiograma. [Documento en
línea]. Disponible: http://www.galeon.com/medicinadeportiva/CURSOECG4.htm.
[Consulta: 2009, Julio 09].

69

70

71
Introducción
El propósito de este manual es dar al usuario los conocimientos necesarios para la
buena manipulación del prototipo, para evitar un mal funcionamiento en el futuro.
Objetivos
Suministrar al usuario toda la información necesaria para el manejo del
sistema.
Mostrar las posibles fallas técnicas al usuario si se llegase a presentarse por
una mala manipulación.
Tutelar al usuario durante la instalación del sistema.
Indicar las especificaciones técnicas del equipo.
Descripción el sistema
El sistema de captura y almacenamiento de la señal ECG de roedores para ser
utilizados en la investigación médica, es una estación de trabajo portátil cuyo objetivo
es capturar las señales ECG de ratas Sprague Dawley utilizadas en la investigación
médica, de forma no invasiva y sin requerir de anestésicos. El sistema está dividido
en dos unidades principales, una móvil y una local, la primera es la que el usuario
puede trasladar con facilidad de un lugar a otro y que tiene una jaula especializada
para inmovilizar a el roedor y ajustar los sensores a la posición de sus patas, anexo a
esta estructura se encuentra un modulo que brinda una interacción con el usuario a
través de una pantalla LCD y que le permite seleccionar la forma en que desea
capturar la señal que este necesite, asignándole un código a el roedor, escogiendo el
tiempo de captura y derivación de la señal, estos datos serán almacenados en una
memoria y después cuando se conecten a la unidad local serán descargados a esa para
su visualización. La unidad local es un software de alto nivel desarrollado de Visual
Basic versión, es un lenguaje muy amigable, con este software se podrá poseer total
control del sistema de adquisición de la señal, así como también llevar un registro en
una base de datos de los experimentos realizados y los resultados obtenidos a modo
de comentario por parte del especialista, así mismo se podrá visualizar la grafica en

72
modo continuo o modo discreto, esto como requerimiento de los especialistas para un
mejor estudio de las señales obtenidas de los sujetos de experimentación. La conexión
entre el sistema y el equipo donde esté instalado el alto nivel será vía cable USB, lo
que lo hace totalmente adaptable y universal.
Especificaciones Técnicas
Alimentación:
Dos baterías de 9V DC para la estación de trabajo portátil.
Fuente de alimentación AC 110V 60Hz para la PC donde esté instalado el alto
nivel
Manejo de la estación de trabajo portátil
El sistema cuando trabaja en modo portátil es capaz de adquirir las señales con
las mismas especificaciones que se le podrían asignar mediante el software de alto
nivel. Una vez que el roedor es introducido en la jaula que contiene los electrodos, se
enciende el sistema y de aquí en adelante bastara con seguir las instrucciones que se
proyectan en la pantalla de la LCD. El primer mensaje en aparecer será “Seleccione
el modo de trabajo”, seguidamente aparecerá un segundo mensaje que dirá “1_modo
PC 2_Modo teclado”, para trabajar en el modo portátil se deberá presionar la tecla
que tiene impreso el número 1 del teclado, luego un nuevo mensaje solicitara el
código del roedor, en este punto el usuario ingresara el numero que este le asigne al
código de la rata en dos dígitos es decir que si se desea marcar el numero 1, se deberá
escribir 01, después de este mensaje el sistema solicitara la confirmación del numero
seleccionado, en caso de que no aparezca el numero que usuario quiso ingresar, puede
presionar la tecla correspondiente a la palabra “NO” para que se regrese nuevamente
al menú donde se pregunta por el código de la rata. Los mensajes siguientes siguen la
misma filosofía, numero de dos dígitos y después de ingresar el número se solicitara
la confirmación por parte del usuario con acepción del último mensaje donde se pide
se introduzca la derivación a obtener, en este caso basta con presionar un solo digito,

73
pero de igual forma se solicitara la confirmación. Luego de confirmar ese último
mensaje, el sistema tomara la señal seleccionando le derivación correspondiente y el
tiempo asignado por el usuario, esta información será almacenada en la memoria y a
la espera de que se descargue para ser visualizada por el software de alto nivel. Luego
el menú se posicionara nuevamente en selección de modo de trabajo.
Manejo de la estación de trabajo fija (Software de alto nivel)
Para entrar a esta función el procedimiento es muy similar al anterior, se
enciende la estación portátil, pero la diferencia está en que una vez hecho esto, se
conecta mediante el cable USB a cualquier puerto de la PC. Ya en este punto deberá
aparecer en el menú de la LCD la opción para seleccionar el modo de trabajo, en vez
de entrar a la opción modo teclado, se ingresa a la opción modo PC, a partir de este
punto todo el control será por el software de alto nivel. Se ingresa al programa de alto
nivel.
El programa presenta una pantalla muy amigable en la cual aparece un menú de
opciones desplegadas en la parte superior del programa por el cual el usuario se podrá
desplazar por todas las opciones que tiene a disposición. Ver figura 35

74
Imagen principal alto nivel
En la barra de menú, esta la opción información, donde el usuario escogerá
que derivación desea tomar, y el tiempo que desea tomarla, así como también el
código de la rata y la fecha de la muestra.
La parte de configuración es la encargada de establecer los parámetros necesarios
para una toma exitosa de los valores o una descarga efectiva de los datos
almacenados en la memoria del sistema portátil, algunas de estas opciones son, los
puertos a los cuales se estará conectando con la PC, sincronización, borrar memoria y
modo tiempo real

75

76
Introducción
Usualmente los dispositivitos electrónicos no requieren características
especiales, es por ello que el mantenimiento preventivo del sistema no implica un
gran trabajo, por el contrario es relativamente sencillo pero cabe destacar que de igual
forma es recomendable hacerle un mantenimiento en forma periódica, aunque el
sistema no lo necesite en este momento.
Este manual tiene como plan brindarle con fáciles consejos diferentes formas
de mantener su equipo en perfecto estado además de capacitarlo para detectar
pequeños errores capaces de resolver por cuenta propia.
Mantenimiento Preventivo
El objeto de este mantenimiento es llevar por una serie de pasos al
usuario para que se mantenga en óptimas condiciones el prototipo y evitar
fallas o daños en un futuro y alargar la vida útil del mismo
Llevar y mantenerlo mientras no se use, el prototipo a un sitio limpio,
sin polvo.
Verificar que la alimentación este desconectada.
Después de realizar las pruebas necesarias siempre se debe limpiar las
láminas de contacto para prolongar su utilidad.
Limpiar preferiblemente con papel higiénico el prototipo.
Mantenimiento Correctivo
En esta sección se refiere a resolver fallas comunes que pueden surgir en el prototipo.
El sistema no enciende
Verificar la carga de la batería.
Verificar la continuidad de los cables de la batería.
El sistema enciende pero no muestra la señal
Verificar el voltaje.
Verificar el voltaje en los módulos de control.
Verificar la correcta conexión del cable USB.

77
No recibe la imagen en la Laptop
Verificar la carga en la batería.
Verificar el voltaje en los módulos de control.
Cierre y abra de nuevo el software.
Verificar que las patas del roedor estén haciendo contacto con
los electrodos.
Instrucciones de Seguridad
Estas instrucciones están hechas para que el usuario no manipule de una
manera inadecuada el sistema y le ocasione algún daño irreparable.
Siempre que el prototipo no se esté utilizando guardarlo en un lugar limpio y
taparlo, para que evite la acumulación de polvo.
Si el sistema posee una falla que no se encuentra en el manual correctivo,
llamar a servicio técnico.