
TE231 Capitulo 3 Sistemas de Equações Lineares; · Teoria dos grafos: fluxo factível (caixeiro...
80
TE231 Capitulo 3 – Sistemas de Equações Lineares; Prof. Mateus Duarte Teixeira
-
Upload
dangkhuong -
Category
Documents
-
view
215 -
download
0
Transcript of TE231 Capitulo 3 Sistemas de Equações Lineares; · Teoria dos grafos: fluxo factível (caixeiro...
TE231
Capitulo 3 –
Sistemas de
Equações Lineares;
Prof. Mateus Duarte
Teixeira

Sumário 1. Introdução
2. História
3. Matrizes
4. Sistemas de Equações Lineares
5. Normas Vetoriais e Matriciais
6. Métodos Diretos
1. Instabilidades
2. Condicionamento da Matriz
7. Métodos Iterativos

1. Introdução
Resolvem vários problemas teóricos e práticos:
Inteligência artificial: resolução das equações de
Bellman;
Teoria dos grafos: fluxo factível (caixeiro viajante: simétrico ou assimétrico (trechos percorridos
diferentes));
Circuitos elétricos: análise de sistemas lineares (forma
real e complexa);
Teoria de controle: sistemas lineares e a linearização
de sistemas não lineares;
Transferência de Calor e Mecânica dos Fluidos;

APLICAÇÃO DAS EQUAÇÕES LINEARES
A aplicação de equações e sistemas lineares é fundamental na
resolução de problemas que envolvem equações com muitas incógnitas.
Problemas desse tipo se apresentam por exemplo, na distribuição de
energia elétrica, no gerenciamento das linhas de telecomunicações e na
logística para transporte de mercadorias em uma região.

Em que situações devemos resolver um
sistema de equações?
Resolver sistemas de equações é
necessário em qualquer estudo
onde se pesquise a interação de
variáveis em determinado fenômeno
ou experimento.
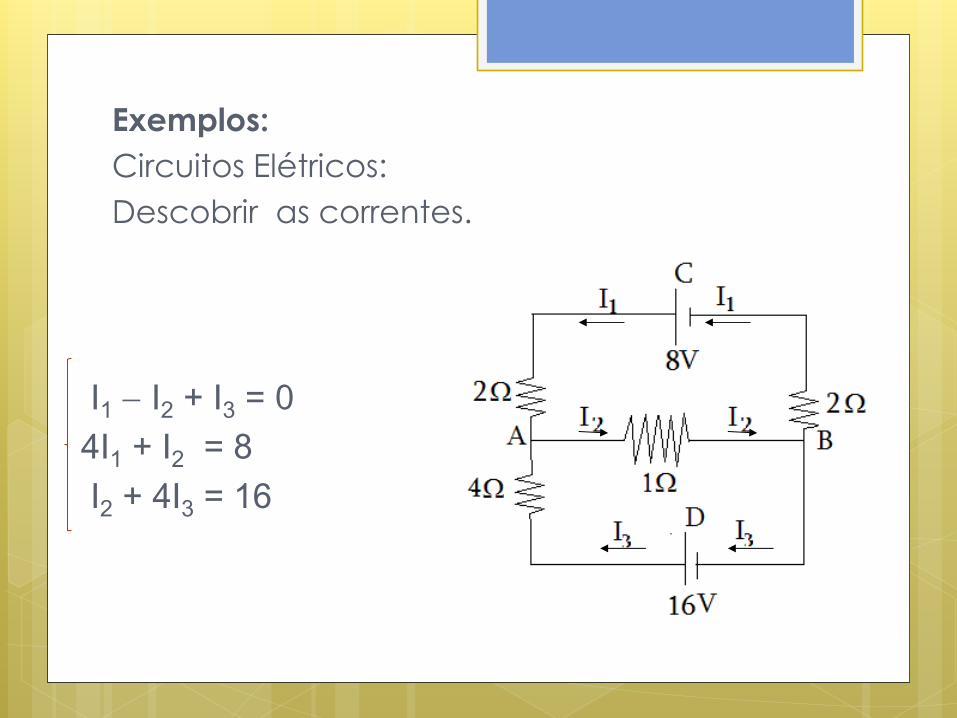
Exemplos:
Circuitos Elétricos:
Descobrir as correntes.
I1 I2 + I3 = 0
4I1 + I2 = 8
I2 + 4I3 = 16
Exemplos:
Balanceamento de equações químicas
wNH3 + x O2 yN2 + zH2O
w = 2y
3w = 2z
2x = z
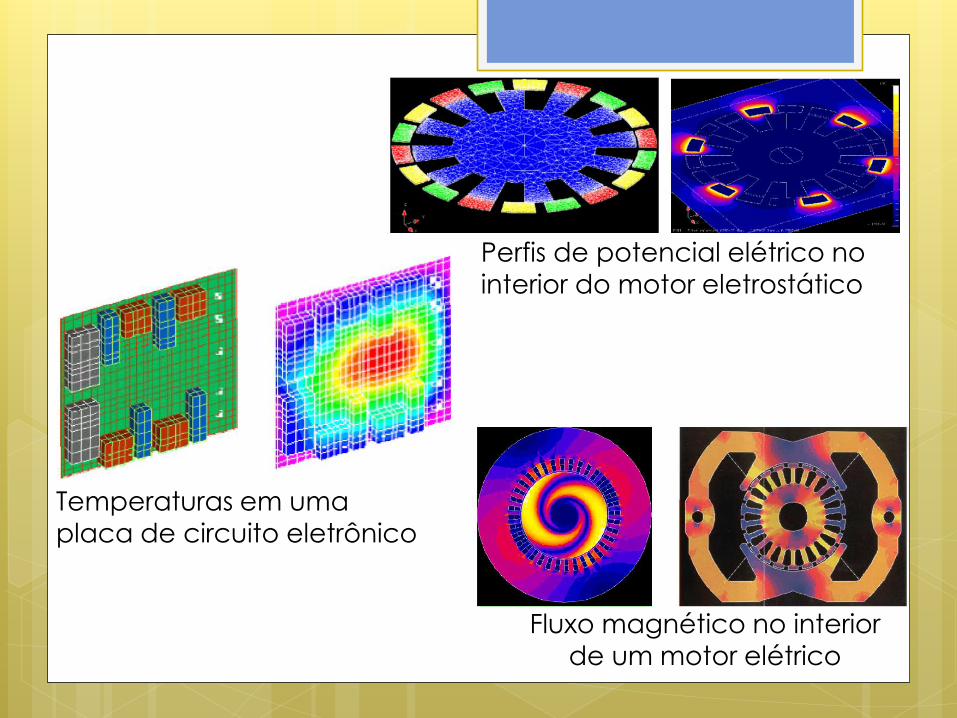
Temperaturas em uma
placa de circuito eletrônico
Perfis de potencial elétrico no
interior do motor eletrostático
Fluxo magnético no interior
de um motor elétrico

O que é uma equação linear?
Equação com certo número de variáveis onde
cada termo não pode ter grau diferente de 1.
Exemplo:
3x + πy – 6z + w = 2
3xy + 5z = 7
Produto de duas variáveis de grau 1 tem grau 2.
1
𝑥− 3𝑦 + 𝑧 = 10
Equivale x-1, o grau não é 1

Conjunto de equações lineares.
Exemplos:
x + y – z = 7 x + y – 3z + w = 0 x – 2y + z = 8
2x – 4y + z = 0 x – y + z + 2w = 5 3x + y – z = 1
x + y = 3 2x – y – z – w = 3 x + y + z = 2
x – y – 3z = 13
3 equações 3 equações 4 equações
3 incógnitas 4 incógnitas 3 incógnitas
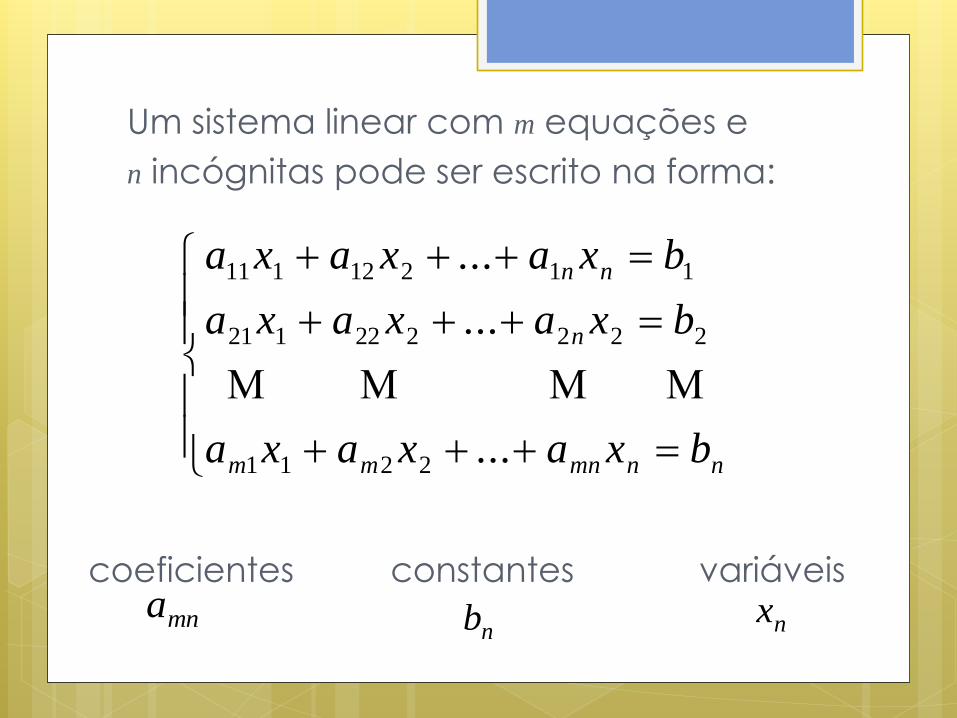
Um sistema linear com m equações e
n incógnitas pode ser escrito na forma:
coeficientes constantes variáveis
nnmnmm
n
nn
bxaxaxa
bxaxaxa
bxaxaxa
...
...
...
2211
222222121
11212111
nxnbmna

Resolver o sistema linear
Calcular os valores de , caso
existam, que satisfaçam as m equações.
)...,,2,1( njx j

Notação matricial:
onde
é a matriz dos coeficientes.
BXA
mnmm
n
n
aaa
aaa
aaa
A
21
22221
11211

É o vetor das variáveis
É o vetor dos termos independentes
nx
x
x
X
2
1
nb
b
b
B
2
1
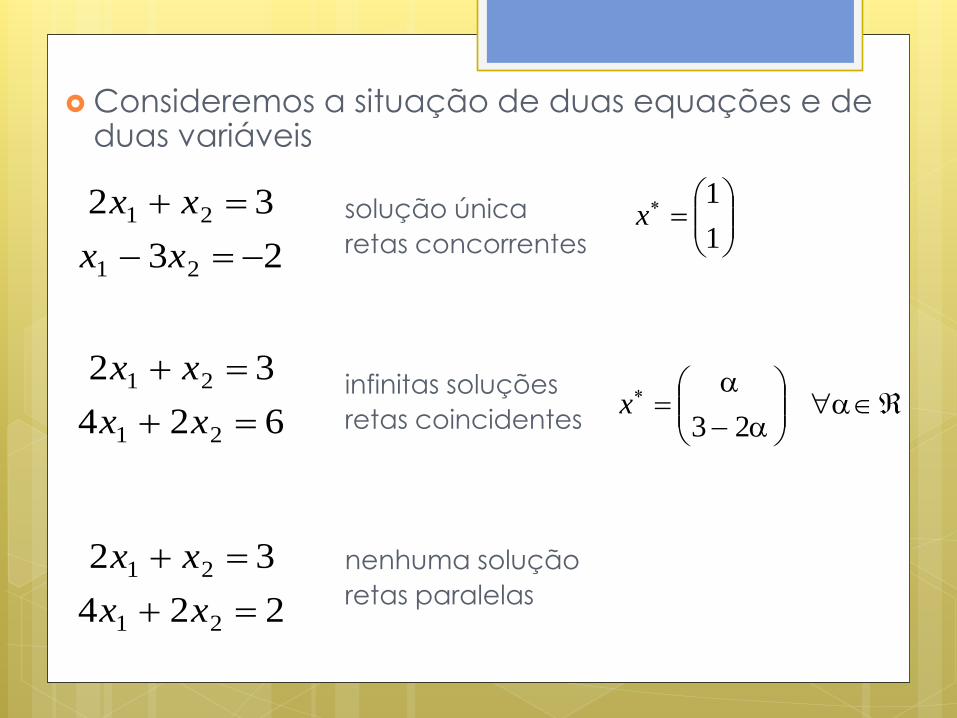
Consideremos a situação de duas equações e de duas variáveis
solução única
retas concorrentes
infinitas soluções
retas coincidentes
nenhuma solução
retas paralelas
23
32
21
21
xx
xx
624
32
21
21
xx
xx
224
32
21
21
xx
xx
1
1x
23x

2. Interpretação Geométrica
Cada equação linear de duas variáveis é a
equação de uma reta:
2x+y=3 → y = - 2x + 3 (forma da função afim)
coef. angular a = -2 coef. linear : b = 3
x – 2y = 4 →
coef. angular 𝑎 =1
2 coef. linear: b = -2;
y=x
2− 2

Gráficos:
2x+ y = 3
x – 2y = 4
S={(2,-1)}
A solução de um sistema de duas equações e duas incógnitas é o ponto de intersecção de duas retas representadas por essas equações.
2x+y=3
x-2y=4
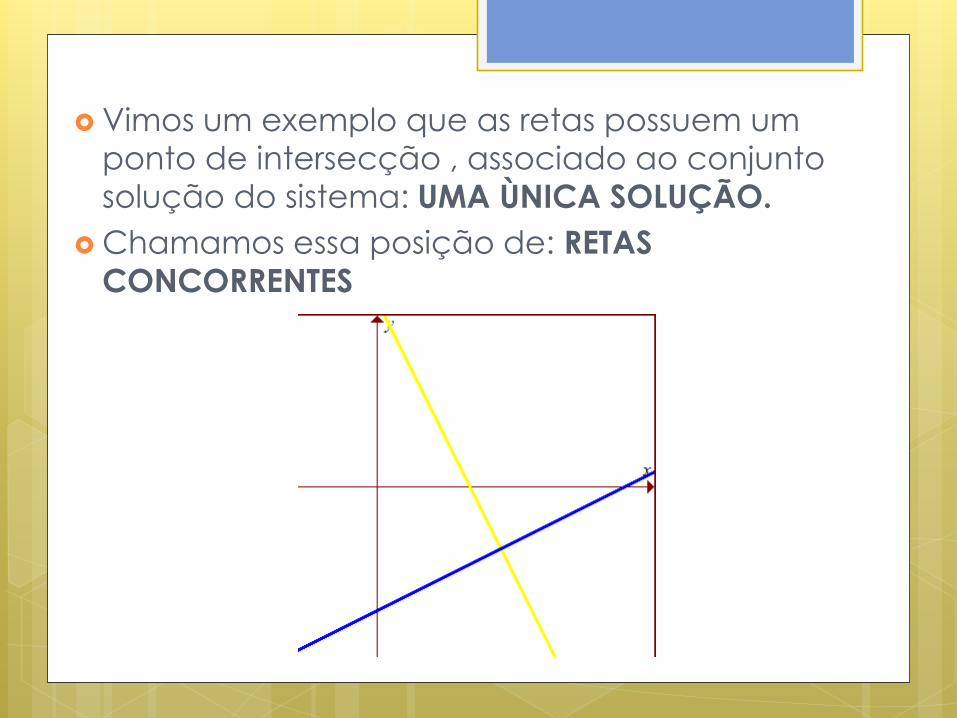
Vimos um exemplo que as retas possuem um
ponto de intersecção , associado ao conjunto
solução do sistema: UMA ÙNICA SOLUÇÃO.
Chamamos essa posição de: RETAS
CONCORRENTES

Exemplo:
6x – 3y = 1
2x – y = 3
Sistema Impossível.
Como são as retas associadas às equações?
Não possuindo intersecção, as retas são: PARALELAS.
6x-3y=1
2x-y=3

Exemplo:
2x + 2y = 8
x + y = 4
Infinitas soluções.
Duas maneiras diferentes de
apresentar a mesma equação.
Nessa situação dizemos que as retas são COINCIDENTES.
2x+2y=8
x+y=4

No caso geral de m equações e n variáveis
também temos estas três situações: solução
única, infinitas soluções e nenhuma solução.
Notação:
solução exata
solução aproximada
xx

3. Tipos de Métodos
Existem dois tipos de métodos para
resolver sistemas de equações lineares:
Métodos Diretos: Utilizam um número finito de
passos para obter a solução do sistema. Para
minimizar erros de arredondamento adota-se
o pivoteamento.
Métodos Iterativos: Podem ser mais rápidos,
fornecendo sequências que convergem para
a solução sob certas condições.

Métodos Diretos
Eliminação de Gauss: Pivotamento
Gauss Jordan (Inversa)
Decomposição LU: A = LU (L é matriz triangular inferior e U matriz
triangular superior); LUx=b; logo Ly=b (obtém y) em seguida Ux = y (obtém-se x)
Choleski: Se A = AT e A é positiva definida então A = LLT,
onde L é matriz triangular inferior.
Observações:
Um sistema é considerado de pequeno
porte se contém até 30 variáveis
Um sistema é considerado de médio porte
se contém até 50 variáveis
Um sistema é de grande porte se contém mais de 50 variáveis.
Para escolher um algoritmo eficiente para
calcular a solução de um sistema deve-se levar em consideração a estrutura da matriz
A, seu tamanho, esparsidade e simetria.

4. Eliminação de Gauss
Neste método direto operações
elementares da Álgebra Linear são
aplicadas:
Troca de linhas
Multiplicação de uma linha por uma
constante não nula;
Adição (subtração) de uma linha com um
múltiplo de outra linha, para substituir uma
das linhas envolvidas na operação.

O método consiste de dois passos básicos:
Triangularização: transforma a matriz A numa matriz triangular superior, mediante operações elementares nas linhas, pois este tipo de sistema é de fácil resolução.
Retrosubstituição: consiste no cálculo dos componentes do vetor solução, a partir da solução imediata do último componente e então substituímos regressivamente nas equações anteriores.

Teorema 1: Seja um sistema linear.
Aplicando sobre as equações deste uma
sequência de operações elementares
escolhidas entre:
trocar a ordem das equações,
multiplicar uma equação por constante,
adicionar um multiplo de uma equação a outra;
Obtemos um novo sistema
equivalente. bxA~~
bAx
Suponha . A eliminação e
efetuada por colunas.
O elemento é denominado pivô na
primeira etapa. O elemento é o pivô
da segunda etapa. O processo repete-se
até termos um sistema linear triangular.
Os elementos são os
multiplicadores da primeira etapa.
Para gerar os zeros da coluna 1 linha i,
faça na linha i. Repita o
processo para a coluna 2.
0ADet
11a
22a
1111 aam ii
11 LmLL iii

Exemplo:
Seja o seguinte sistema linear
3234
22
1423
321
321
321
xxx
xxx
xxx
3/53/223/1
3/53/23/1
1423
32
32
321
xx
xx
xxx
03/24
3/53/23/1
1423
3
32
321
x
xx
xxx
0
5
3
x
12122 LmLL
3
4,
3
13121 mm
13133 LmLL
13/1
3/132 m
Problema: Pivô nulo ou próximo de zero!!!!
Estratégia de pivoteamento parcial: No início de cada eliminação de Gauss,
trocando as linhas, escolher para o pivô o maior da coluna j.
Estratégia de pivoteamento total No início de cada eliminação de Gauss,
escolher para o pivô o maior entre todos elementos que atuam no processo de eliminação.
Problema: Muitas operações de
comparação!!
ija
ija
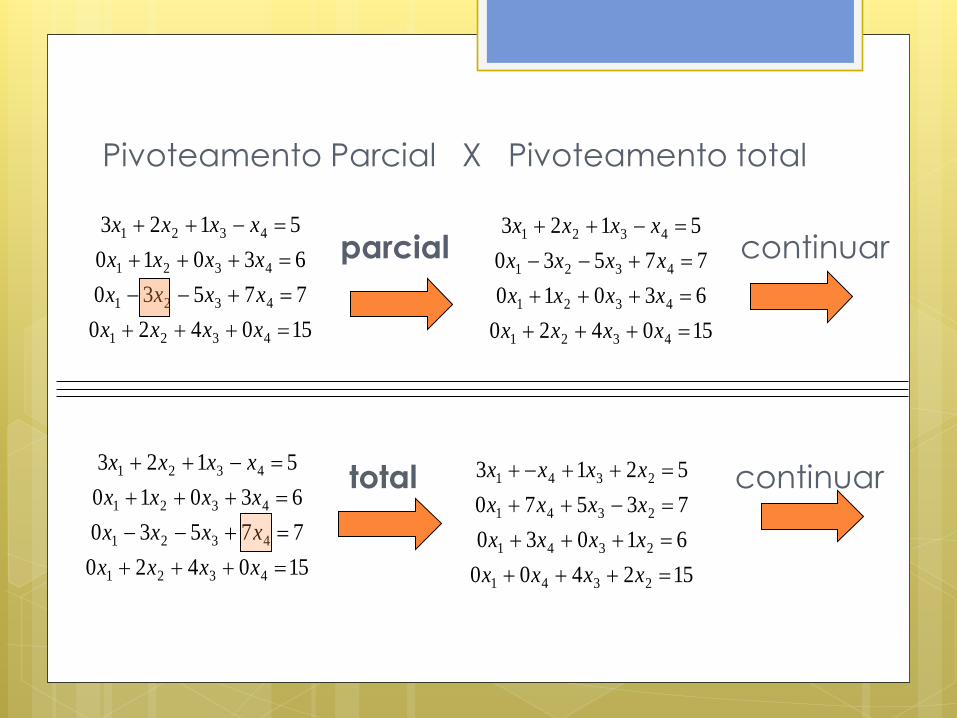
Pivoteamento Parcial X Pivoteamento total
parcial continuar
total continuar
150420
77530
63010
5123
4321
4321
4321
4321
xxxx
xxxx
xxxx
xxxx
150420
63010
77530
5123
4321
4321
4321
4321
xxxx
xxxx
xxxx
xxxx
150420
77530
63010
5123
4321
4321
4321
4321
xxxx
xxxx
xxxx
xxxx
152400
61030
73570
5213
2341
2341
2341
2341
xxxx
xxxx
xxxx
xxxx

5. Decomposição LU Dado um sistema de equações lineares, com A
não-singular:
Ax = b
A decomposição LU busca encontrar três matrizes nxn de maneira que
PA = LU A = P-1LU
Onde: P é uma matriz de permutação (de pivoteamento),
inicia-se com a matriz I (identidade) que é colocada ao lado da matriz A, tal matriz sofrerá mudanças nas linhas se ocorrerem trocas entre linhas.
L é uma matriz diagonal inferior (Lower)
U é uma matriz triangular superior (Upper)

Na decomposição A=LU a matriz L é
triangular inferior com diagonal unitária e
a matriz U é triangular superior.
Passos para a solução:
Resolver Ly=Pb por substituição direta.
Resolver Ux=y por retrosubstituição.

Substituição Direta
Retro substituição
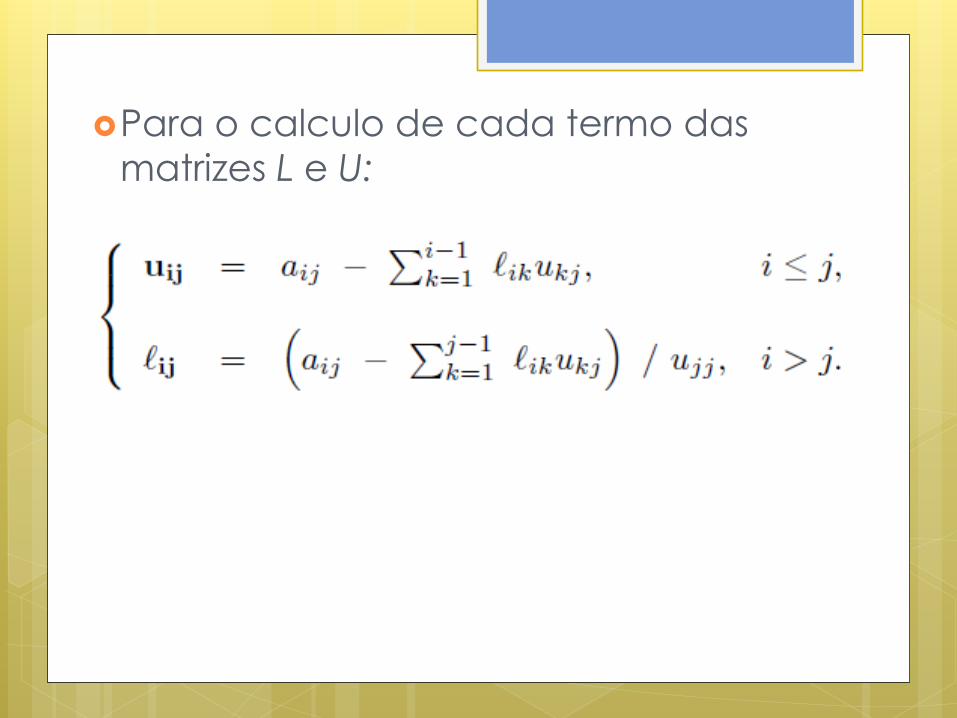
Para o calculo de cada termo das
matrizes L e U:

Exemplo da decomposição LU para uma
matriz A3x3 sem pivotamento.
33
2322
131211
3231
21
ˆ00
ˆˆ0
ˆˆˆ
1
01
001
a
aa
aaa
mm
mLUAjj
ij
a
amij
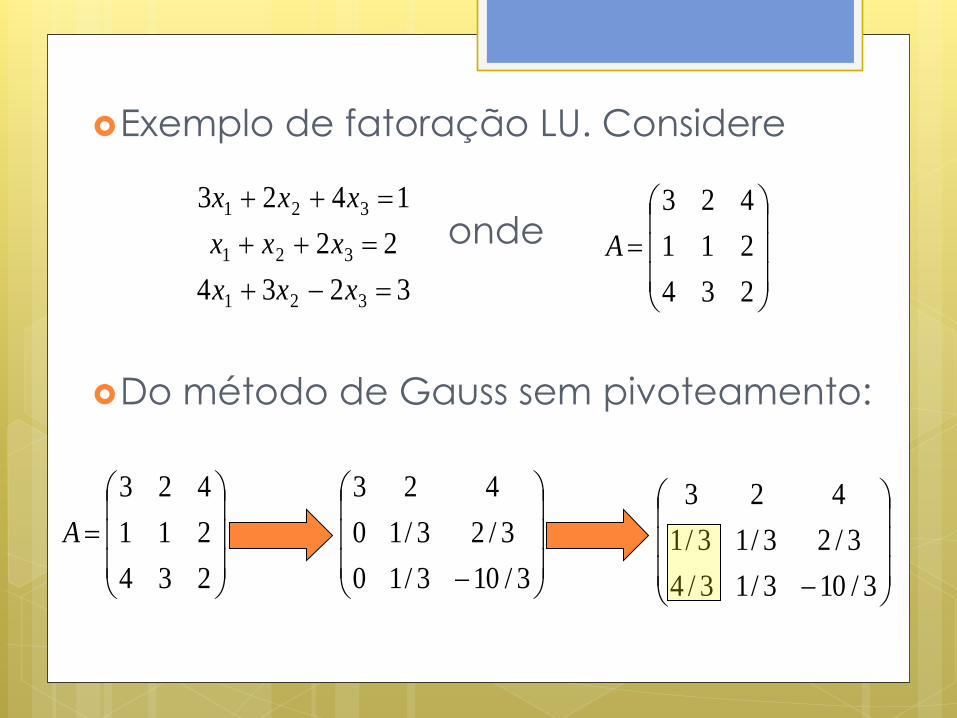
Exemplo de fatoração LU. Considere
onde
Do método de Gauss sem pivoteamento:
3234
22
1423
321
321
321
xxx
xxx
xxx
234
211
423
A
234
211
423
A
3/103/10
3/23/10
423
3/103/13/4
3/23/13/1
423
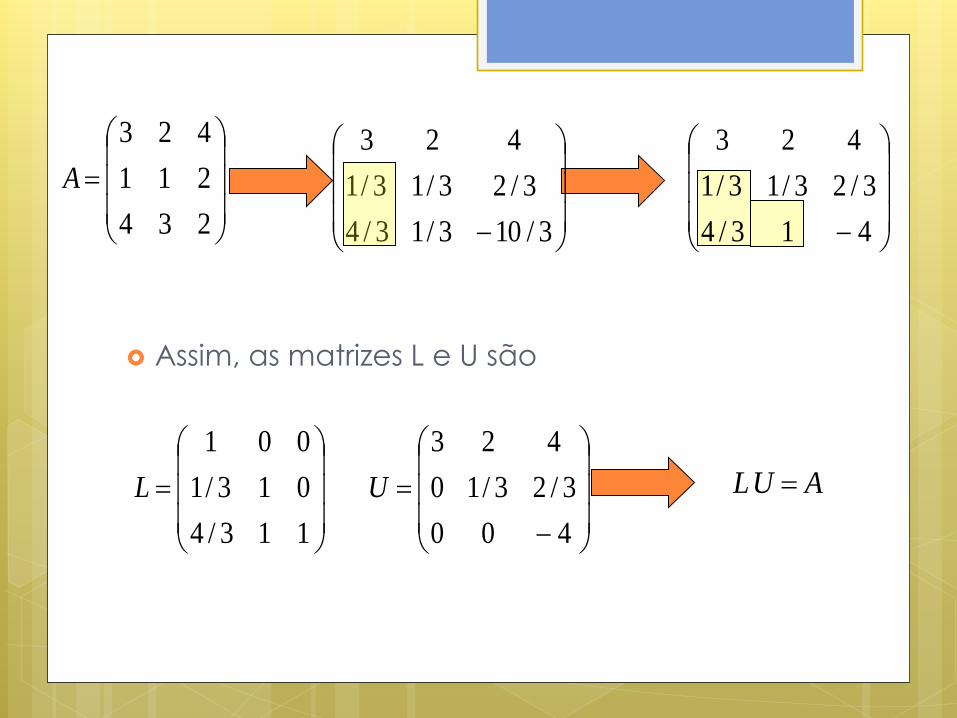
Assim, as matrizes L e U são
234
211
423
A
3/103/13/4
3/23/13/1
423
113/4
013/1
001
L
413/4
3/23/13/1
423
400
3/23/10
423
U AUL

Resolvendo o sistema por fatoração LU:
Continuando
0
5
3
x
3234
22
1423
321
321
321
xxx
xxx
xxx
bxA
byL
33/4
23/1
1
321
21
1
yyy
yy
y
yxU
04
3/53/23/1
1423
3
32
321
x
xx
xxx
0
3/5
1
y
6. Fatoração de Cholesky(i)
Se Anxn é uma matriz definida positiva (xT Ax > 0) e simétrica, então tal matriz pode ser fatorada na forma A = LU = LLT cujos elementos diagonais de L são estritamente positivos.
Fatoração de Cholesky: Primeiro verificar se uma matriz simétrica é definida positiva. Em caso positivo, continuar com o método de Cholesky.
O método de Cholesky requer aproximadamente a metade das operações necessárias para a fatoração LU, da ordem de n3/6 operações.

Como calcular os elementos de L
Obtida a matriz L
resolve-se o sistema:
Passo 1: Calcular Ly=b
Passo 2: Calcular LTx=y

Obtenha a solução do sistema de
equações lineares através de Cholesky.
𝑥 + 𝑦 = 2
𝑥 + 2𝑦 − 𝑧 = 1
−𝑦 + 3𝑧 = 5
Fatoração de Cholesky: Primeiro verificar
se uma matriz simétrica é definida positiva.
Em caso positivo, continuar com o método
de Cholesky.
O método de Cholesky requer
aproximadamente a metade das
operações necessárias para a fatoração
LU, da ordem de n3/6 operações.

7. Métodos Iterativos
É bastante comum encontrar sistemas lineares
que envolvem uma grande porcentagem de
coeficientes nulos.
Esses sistemas são chamados de sistemas
esparsos.
Para esses tipos de sistemas, o método de
Eliminação de Gauss não é o mais apropriado,
pois ele não preserva essa esparsidade, que
pode ser útil por facilitar a resolução do sistema.

Métodos Iterativos são indicados para resolver sistemas esparsos e de grande porte;
Partem de uma solução inicial e sistematicamente geram uma sequência de iterandos;
Métodos diretos: eliminação por Gauss, fatoração LU, fatoração de Cholesky, ... Fornecem solução de qualquer sistema. Para minimizar problemas de arredondamento, adota-se o pivoteamento.
Métodos iterativos: podem ser mais rápidos e necessitar de menos memória do computador. Fornecem seqüências que convergem para a solução sob certas condições.


Seja Ax=b um sistema linear de ordem n.
A ideia é generalizar o método do ponto
fixo, escrevendo o sistema linear na forma
x=Cx+g
onde C é uma matriz de ordem n e g é
um vetor coluna nx1.
Dado um vetor aproximação inicial x(0) ,
construímos iterativamente:
gxCx )1()2(
gxCx )0()1(

Se a sequência x(0) , x(1) ,....., x(k)
convergir
Então é a solução do sistema linear
gxCxLim kk
grandek
)1()(
xbxA com

Se a sequência x(k) estiver suficientemente
próximo de x(k+1) paramos o processo, segundo
uma precisão ,
então x(k) é a solução do sistema linear.
Computacionalmente, um número máximo de
iterações também é critério de parada.
1
1
)( ki
ki
ni
k xxMAXd

7.1. Método de Gauss-Jacobi
Seja o sistema linear:
Se podemos isolar
por separação da diagonal.
nnnnnnn
nn
nn
bxaxaxaxa
bxaxaxaxa
bxaxaxaxa
......
.........................................................
......
......
332211
22323222121
11313212111
niaii ...1para0
gxCx

Iterativamente, o sistema reescreve-se como:
)(
11,
)(
22
)(
11
)1(
)(
2
)(
323
)(
1212
22
)1(
2
)(
1
)(
313
)(
2121
11
)1(
1
......1
.........................................................
......1
......1
k
nnn
k
n
k
nn
nn
k
n
k
nn
kkk
k
nn
kkk
xaxaxaba
x
xaxaxaba
x
xaxaxaba
x

Desta forma temos , onde
Do método de Gauss-Jacobi, dado ,
Obtemos , ....., através da relação
recursiva
gxCx
0.......//
.................................
/.......0/
/....../0
21
2222221
1111112
nnnnnn
n
n
aaaa
aaaa
aaaa
C
nnn ab
ab
ab
g
/
.......
/
/
222
111
)0(x)1( kx)1(x
gxCx kk )()1(
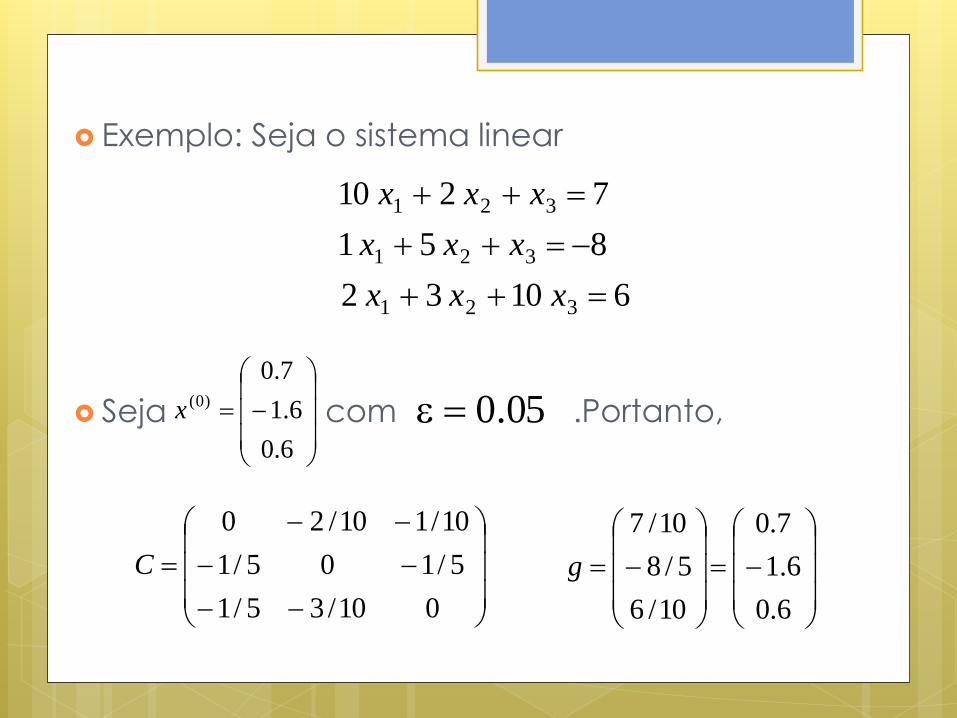
Exemplo: Seja o sistema linear
Seja com .Portanto,
61032
851
7210
321
321
321
xxx
xxx
xxx
6.0
6.1
7.0)0(x 05.0
010/35/1
5/105/1
10/110/20
C
6.0
6.1
7.0
10/6
5/8
10/7
g

Substituindo
Segue . Calculando
94.06.0)6.1(3.0)7.0(2.06.03.02.0
86.16.1)6.0(2.0)7.0(2.06.12.02.0
96.07.0)6.0(1.0)6.1(2.07.01.02.0
)0(
2
)0(
1
)1(
3
)0(
3
)0(
1
)1(
2
)0(
3
)0(
2
)1(
1
xxx
xxx
xxx
94.0
86.1
96.0)1(x
05.034.0
05.026.0
05.026.0
)0(3
)1(3
)1(3
)0(2
)1(2
)1(2
)0(1
)1(1
)1(1
xxd
xxd
xxd

Continuando com
Segue é a solução, pois
966.0
98.1
978.0)2(x
12.012
1
)2(ii
ni
xxMAXd
998.0
999.1
999.0)3(x
032.0)2()3(
1
)3(ii
ni
xxMAXd

Critérios de Convergência
Nos métodos iterativos são necessários critérios que garantam a convergência.
Um critério para a convergência do Método de Gauss-Jacobi é dado pelo Critério das linhas.
Dado o sistema Ax=b , seja
Se , então o método de Gauss-Jacobi
gera uma série convergente para a solução do
sistema independentemente da escolha de .
||/)||(1
kk
n
kjj
kjk aa
1max1
knk
)0(x
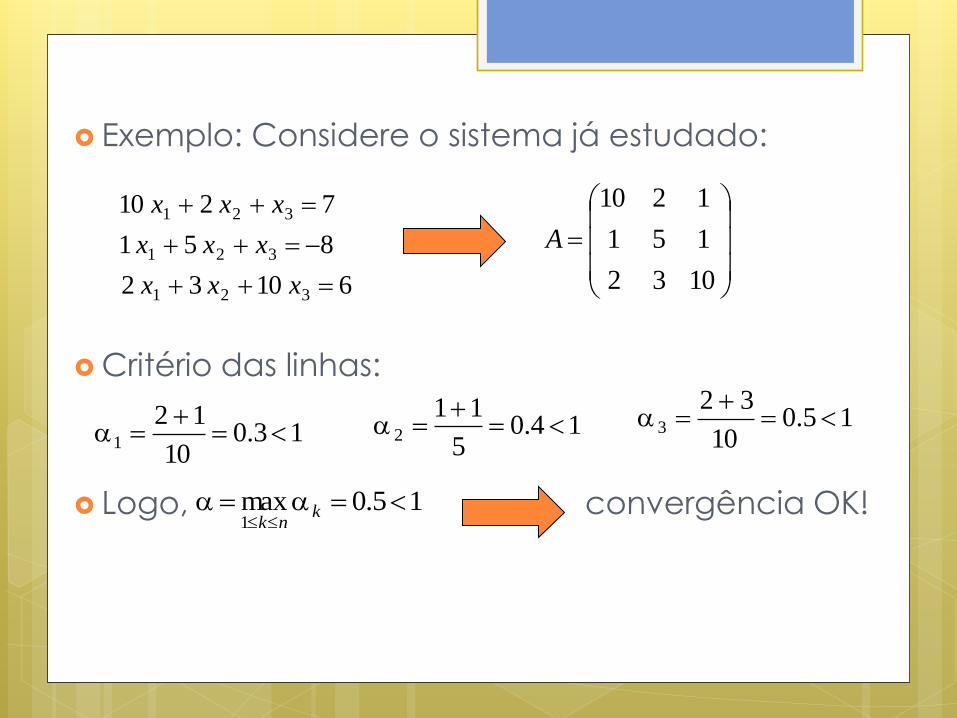
Exemplo: Considere o sistema já estudado:
Critério das linhas:
Logo, convergência OK!
1032
151
1210
A
61032
851
7210
321
321
321
xxx
xxx
xxx
13.010
121
15.010
323
14.0
5
112
15.0max1
knk
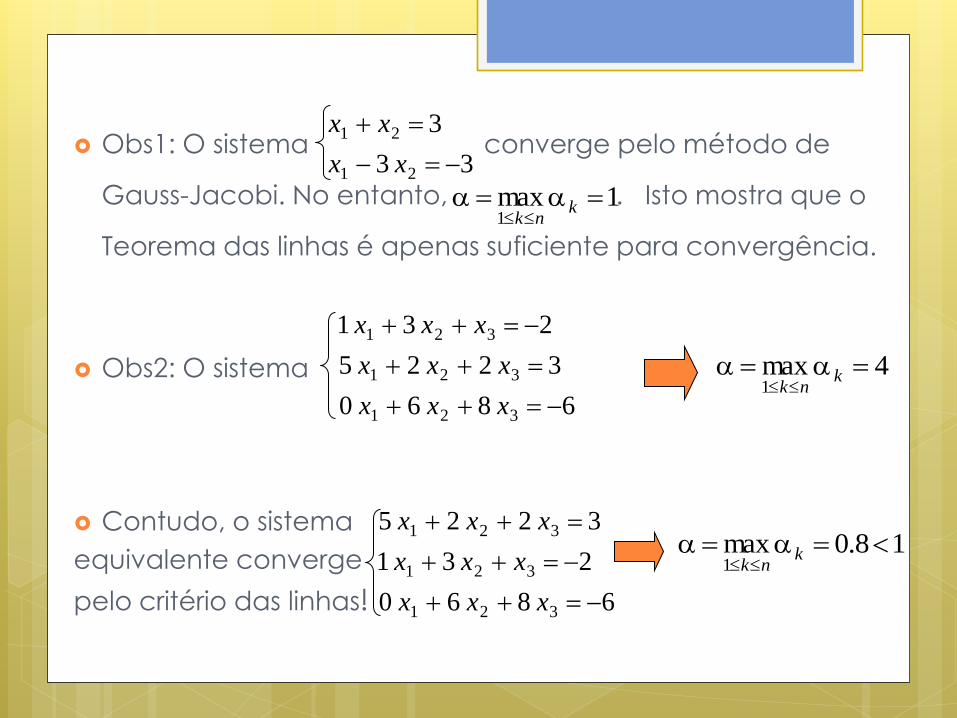
Obs1: O sistema converge pelo método de
Gauss-Jacobi. No entanto, . Isto mostra que o
Teorema das linhas é apenas suficiente para convergência.
Obs2: O sistema
Contudo, o sistema
equivalente converge
pelo critério das linhas!
33
3
21
21
xx
xx
1max1
knk
6860
3225
231
321
321
321
xxx
xxx
xxx
4max1
knk
6860
231
3225
321
321
321
xxx
xxx
xxx18.0max
1
k
nk

7.2. Método de Gauss-Seidel
Seja o sistema linear:
Se podemos isolar
por separação da diagonal.
nnnnnnn
nn
nn
bxaxaxaxa
bxaxaxaxa
bxaxaxaxa
......
.........................................................
......
......
332211
22323222121
11313212111
niaii ...1para0
gxCx

Iterativamente, o sistema reescreve-se como:
)1(
11,
)1(
22
)1(
11
)1(
)(
2
)(
323
)1(
1212
22
)1(
2
)(
1
)(
313
)(
2121
11
)1(
1
......1
.........................................................
......1
......1
k
nnn
k
n
k
nn
nn
k
n
k
nn
kkk
k
nn
kkk
xaxaxaba
x
xaxaxaba
x
xaxaxaba
x

O Método de Gauss-Seidel é uma
variação do Método de Gauss-Jacobi,
pois para calcular utilizamos os
valores
já calculados e os valores restantes
)1( k
jx
)1(
1
)1(
3
)1(
2
)1(
1 ,.....,,,
k
j
kkkxxxx
)1()1(
2
)1(
1 ,.....,,
k
n
k
j
k
j xxx

Exemplo:
Seja o sistema linear
Seja com . Portanto,
0
0
0)0(x 05.0
0633
6143
5115
321
321
321
xxx
xxx
xxx
)1(
2
)1(
1
)1(
3
)(
3
)1(
1
)1(
2
)(
3
)(
2
)1(
1
5.05.00
25.075.05.1
2.02.01
kkk
kkk
kkk
xxx
xxx
xxx

Logo, a primeira iteração fornece
88.075.05.015.05.05.00
75.0025.0175.05.125.075.05.1
10012.02.01
)1(
2
)1(
1
)1(
3
)0(
3
)1(
1
)1(
2
)0(
3
)0(
2
)1(
1
xxx
xxx
xxx
88.0
75.0
1)1(x
88.0088.0
75.0075.0
101
)0(
3
)1(
3
)0(
2
)1(
2
)0(
1
)1(
1
xx
xx
xx
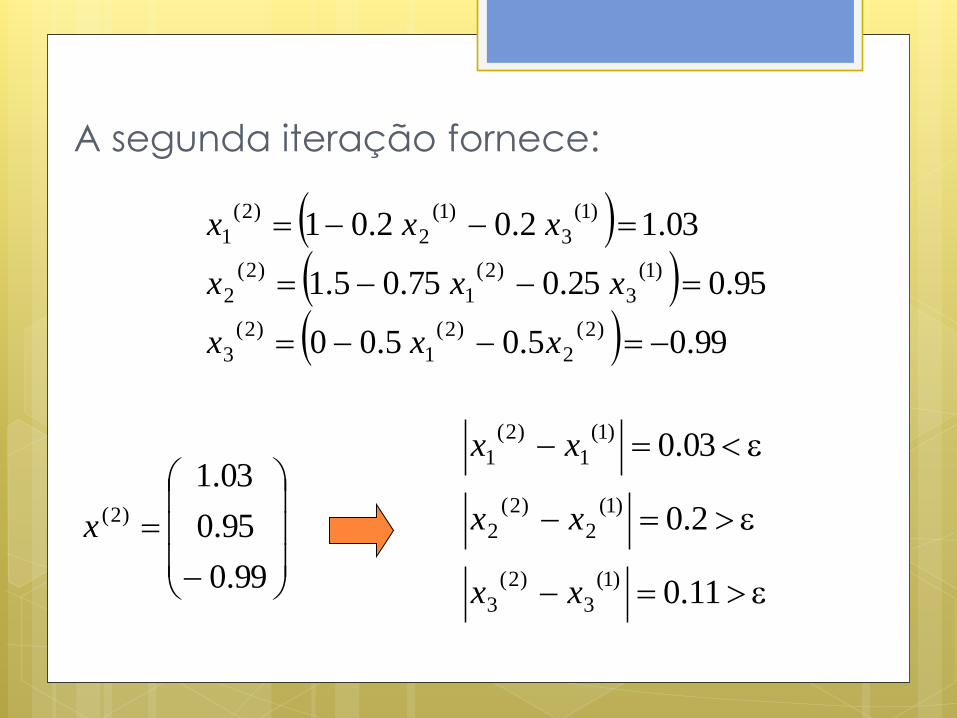
A segunda iteração fornece:
99.05.05.00
95.025.075.05.1
03.12.02.01
)2(
2
)2(
1
)2(
3
)1(
3
)2(
1
)2(
2
)1(
3
)1(
2
)2(
1
xxx
xxx
xxx
99.0
95.0
03.1)2(x
11.0
2.0
03.0
)1(
3
)2(
3
)1(
2
)2(
2
)1(
1
)2(
1
xx
xx
xx

A terceira iteração fornece:
00.15.05.00
99.025.075.05.1
01.12.02.01
)3(
2
)3(
1
)3(
3
)2(
3
)3(
1
)3(
2
)2(
3
)2(
2
)3(
1
xxx
xxx
xxx
00.1
99.0
01.1)3(x
01.0
04.0
02.0
)2(
3
)3(
3
)2(
2
)3(
2
)2(
1
)3(
1
xx
xx
xx

Logo, após a terceira iteração
é solução do sistema considerado com erro menor
do que .
00.1
99.0
01.1)3(xx
05.0
8. Critérios de Convergência
Nos métodos iterativos são necessários critérios
que garantam a convergência.
Convergência para o Método de Gauss-Seidel:
1) Critério das linhas (já visto)
2) Critério de Sassenfeld
Os critérios acima estabelecem condições
suficientes para a convergência.

Método de Gauss-Seidel
Convergência - Critério de Sassenfeld
Sejam
e
n
j
jn
a
a
a
aaa
2 11
1
11
113121
||
||
||
||||||
niaaa
a
aaaaa
ii
n
ij
ijj
i
j
ij
ii
iniiiiiiii
,3,2||/|]|||[
||
||||||||||
1
1
1
1112211

Critério de Sassenfeld
Seja
Se β < 1, o método de Gauss-Seidel gera uma
sequência convergente para qualquer .
Quanto menor β, mais rápida a convergência.
}{max1
ini
)0(x
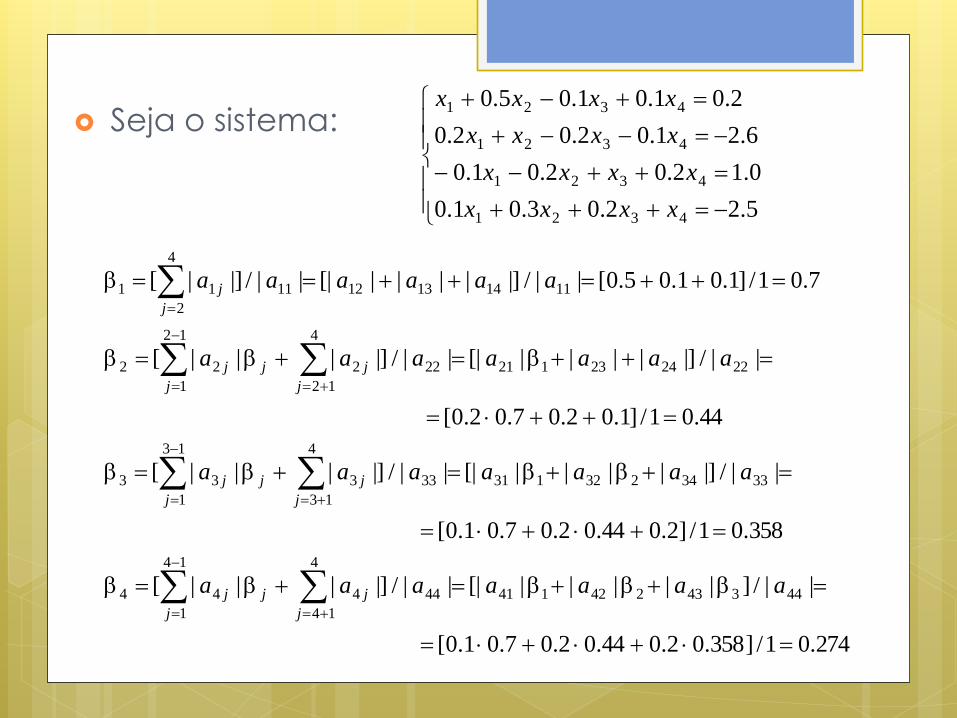
Seja o sistema:
5.22.03.01.0
0.12.02.01.0
6.21.02.02.0
2.01.01.05.0
4321
4321
4321
4321
xxxx
xxxx
xxxx
xxxx
274.01/]358.02.044.02.07.01.0[
||/]|||||[|||/|]|||[
358.01/]2.044.02.07.01.0[
||/|]||||[|||/|]|||[
44.01/]1.02.07.02.0[
||/|]||||[|||/|]|||[
7.01/]1.01.05.0[||/|]||||[|||/]||[
4434324214144
4
14
4
14
1
44
333423213133
4
13
3
13
1
33
22242312122
4
12
2
12
1
22
1114131211
4
2
11
aaaaaaa
aaaaaaa
aaaaaaa
aaaaaa
j
jj
j
j
j
jj
j
j
j
jj
j
j
j
j
Então,
de modo que o método de Gauss-Seidel converge.
17.0}{max1
ini
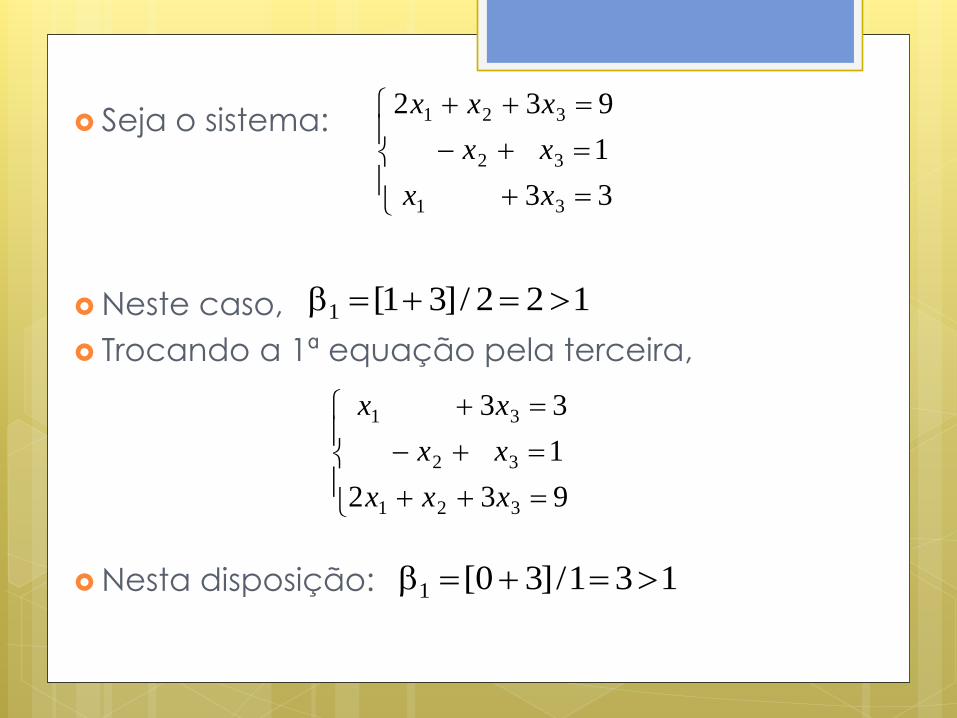
Seja o sistema:
Neste caso,
Trocando a 1ª equação pela terceira,
Nesta disposição:
33
1
932
31
32
321
xx
xx
xxx
122/]31[1
932
1
33
321
32
31
xxx
xx
xx
131/]30[1

Agora se trocarmos a 1ª coluna pela terceira,
Nesta disposição:
923
1
3 3
123
23
13
xxx
xx
xx
3/22//)3/1(1)3/1(3[
3/11/]0)3/1(1[
3/13/]11[
3
2
1
13/2}{max1
ini
Garantia de
convergência
33
1
932
31
32
321
xx
xx
xxx
Seja o sistema:
O método de Gauss-Seidel gera uma sequência
convergente, apesar do critério das linhas não ser
satisfeito.
Pelo critério de Sassenfeld
33
3
21
21
xx
xx
3/13/11
11/1
2
1
O critério de Sassenfeld
não é satisfeito.
O critério de Sassenfeld também é
suficiente, mas não necessário.

9. Metodos Iterativos - Comparação
Seja o sistema:
Método de Gauss-Jacobi:
Temos a sequência:
33
3
21
21
xx
xx
)(1
)1(2
)(2
)1(1
33
1
3
kk
kk
xx
xx
3/4
3/4,
3/5
1,
2
2,
1
3,
0
0 )4()3()2()1()0( xxxxx

Seja o sistema:
Método de Gauss-Seidel:
Temos a sequência:
33
3
21
21
xx
xx
)1(1
)1(2
)(2
)1(1
33
1
3
kk
kk
xx
xx
9/14
3/5,
3/4
1,
2
3,
0
0 )3()2()1()0( xxxx

Comentário1: As duas sequências convergem para a solução exata do sistema . Vejamos,
a) Gauss-Jacobi :
b) Gauss-Seidel:
Comentário 2: A convergência do Método de Gauss-Seidel é mais rápida, por construção do método.
Comentário 3: Embora a ordem das equações num sistema linear não mude a solução exata, as sequências geradas pelos Métodos de Gauss-Jacobi e Gauss-Seidel dependem fundamentalmente da disposição das equações.
5.15.1x
33.133.1)4(GJx
56.167.1)3(GSx

10. Metodos Diretos e Iterativos -
Comparação
1) Convergência:
Os Métodos Diretos são processos finitos portanto
fornecem solução para qualquer sistema linear
não-singular.
Os Métodos Iterativos têm convergência
assegurada sob certas condições.

2) Esparsidade da Matriz:
Em problemas reais, como a discretização de EDO’s
pelo Método de Elementos Finitos ou Diferenças Finitas,
as matrizes dos coeficientes tornam-se esparsas. A
forma de armazenamento destes dados tira proveito da
esparsidade.
Métodos diretos em sistemas esparsos provocam o
preenchimento da matriz e no processo de
Eliminação (escalonamento) geram elementos não-
nulos, onde originalmente tínhamos elementos nulos.
Técnicas especiais de pivoteamento reduzem este
preenchimento. Fatoramento LU dão bons resultados.
Algumas situações estes métodos não são possíveis.
Métodos iterativos não alteram a estrutura da matriz
dos coeficientes. Vantagem.
3) Erros de Arredondamento
Métodos Diretos têm problemas de
arredondamento. Técnicas de Pivoteamento
amenizam tais erros.
Métodos iterativos têm menos erros de
arredondamento, quando a convergência
estiver assegurada.


















