Systèmes à recirculation à quatre rangées de billes … Système de mesure incrémentale de la...
14
Informations MAI 59 NOUV E AU ! mesure absolue de la longueur Mesu re incrémentale o u Systèmes à recirculation à quatre rangées de billes avec système de mesure magnétique intégré Les systèmes à recirculation à quatre rangées de billes KUVE avec système de mesure magnétique intégré sont des ensembles prêts au montage. Ils sont composés d’un chariot de guidage KWVE avec un boîtier adapté dans lequel une tête de lecture est intégrée, ainsi que d’un rail de guidage TKVD avec une rainure longitudinale. Une bande magnétique SIKO est collée dans cette rainure. Cette bande magnétique est protégée contre la poussière, les impuretés et l’usure grâce à une tôle de protection. Le système digital de la mesure absolue (LMSD) est livré avec une électronique de conversion. Dans le système de mesure incrémentale (LMST), elle est déjà intégrée dans la tête de lecture. Le système est intégré entièrement au guidage et ne nécessite donc aucun encombrement supplémentaire. De ce fait, la construction adjacente peut être réalisée de façon plus compacte. Le système de mesure est utilisé pour mesurer les déplacements ; il mesure directement le déplacement effectué par balayage magnétique (mesure incrémentale ou absolue possible). Il fonctionne sans défaut de pas ni erreur de mesure. La bande magnétique comporte un marquage magnétique avec un pas polaire de 5 mm. La vitesse de déplacement maximale du chariot de guidage est de 5 m/s ; la longueur de mesure maximale est de 90 m. 173 532 La partie mécanique du guidage sur rail profilé correspond au système à recirculation de billes KUVE courant. Ces systèmes supportent des charges dans toutes les directions et des moments autour de tous les axes, sont préchargés et ont une précision, une capacité de charge et une rigidité élevées. La combinaison des systèmes de guidage à recirculation de billes éprouvés et du système de mesure électromagnétique donne une solution très compacte, économique pour des applications qui requièrent des déplacements particulièrement précis.
Transcript of Systèmes à recirculation à quatre rangées de billes … Système de mesure incrémentale de la...

Informations MAI 59
NOUVEAU !
mesure absolue de la lo
ngueur
Mesure incrémentale ou
Systèmes à recirculation à quatre rangées de billes avec système de mesure magnétique intégré
Les systèmes à recirculation à quatre rangées de billes KUVE avec système de mesure magnétique intégré sont des ensembles prêts au montage. Ils sont composés d’un chariot de guidage KWVE avec un boîtier adapté dans lequel une tête de lecture est intégrée, ainsi que d’un rail de guidage TKVD avec une rainure longitudinale. Une bande magnétique SIKO est collée dans cette rainure. Cette bande magnétique est protégée contre la poussière, les impuretés et l’usure grâce à une tôle de protection.
Le système digital de la mesure absolue (LMSD) est livré avec une électronique de conversion.
Dans le système de mesure incrémentale (LMST), elle est déjà intégrée dans la tête de lecture.
Le système est intégré entièrement au guidage et ne nécessite donc aucun encombrement supplémentaire. De ce fait, la construction adjacente peut être réalisée de façon plus compacte.
Le système de mesure est utilisé pour mesurer les déplacements ; il mesure directement le déplacement effectué par balayage magnétique (mesure incrémentale ou absolue possible). Il fonctionne sans défaut de pas ni erreur de mesure.
La bande magnétique comporte un marquage magnétique avec un pas polaire de 5 mm. La vitesse de déplacement maximale du chariot de guidage est de 5 m/s ; la longueur de mesure maximale est de 90 m.
173
532
La partie mécanique du guidage sur rail profilé correspond au système à recirculation de billes KUVE courant. Ces systèmes supportent des charges dans toutes les directions et des moments autour de tous les axes, sont préchargés et ont une précision, une capacité de charge et une rigidité élevées.
La combinaison des systèmes de guidage à recirculation de billes éprouvés et du système de mesure électromagnétique donne une solution très compacte, économique pour des applications qui requièrent des déplacements particulièrement précis.
2
Systèmes à recirculationà quatre rangées de billes avec système de mesure magnétique intégré
Page
Consignes de conception et de sécurité ................. 4
Exemple de désignation de commande .................. 8
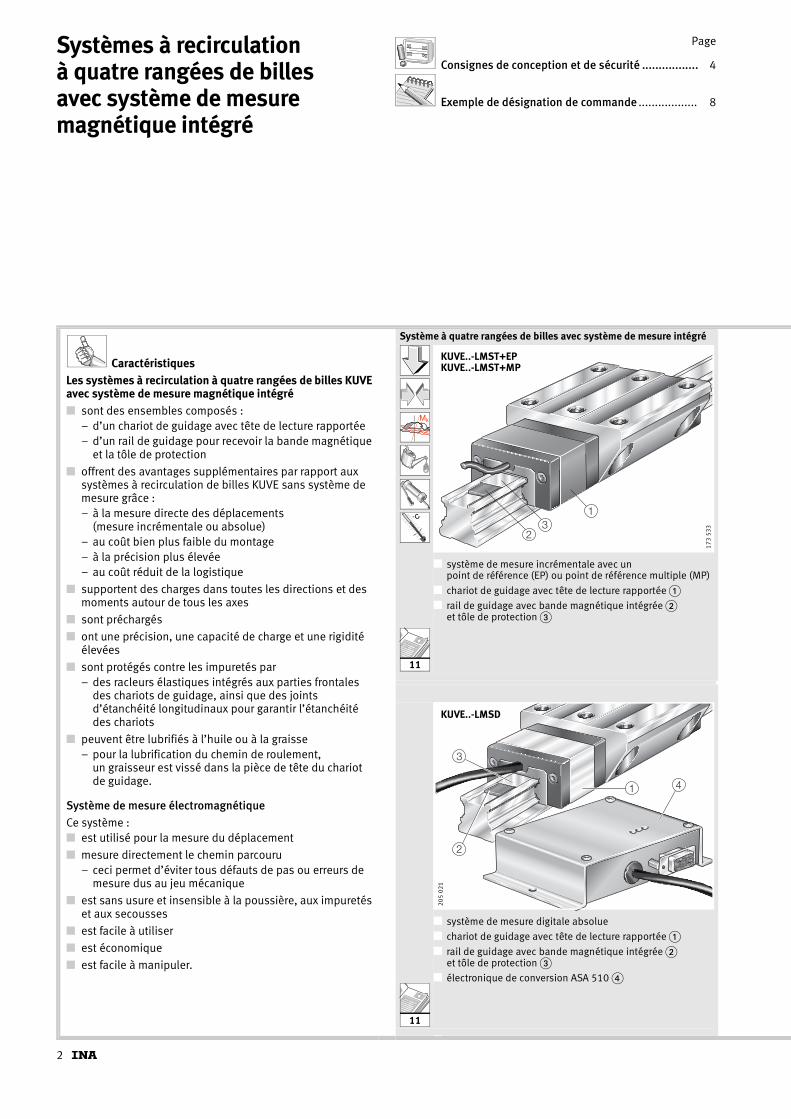
CaractéristiquesLes systèmes à recirculation à quatre rangées de billes KUVE avec système de mesure magnétique intégré■ sont des ensembles composés :
– d’un chariot de guidage avec tête de lecture rapportée– d’un rail de guidage pour recevoir la bande magnétique
et la tôle de protection
■ offrent des avantages supplémentaires par rapport aux systèmes à recirculation de billes KUVE sans système de mesure grâce :– à la mesure directe des déplacements
(mesure incrémentale ou absolue)– au coût bien plus faible du montage– à la précision plus élevée– au coût réduit de la logistique
■ supportent des charges dans toutes les directions et des moments autour de tous les axes
■ sont préchargés
■ ont une précision, une capacité de charge et une rigidité élevées
■ sont protégés contre les impuretés par– des racleurs élastiques intégrés aux parties frontales
des chariots de guidage, ainsi que des joints d’étanchéité longitudinaux pour garantir l’étanchéité des chariots
■ peuvent être lubrifiés à l’huile ou à la graisse– pour la lubrification du chemin de roulement,
un graisseur est vissé dans la pièce de tête du chariot de guidage.
Système de mesure électromagnétiqueCe système :■ est utilisé pour la mesure du déplacement
■ mesure directement le chemin parcouru– ceci permet d’éviter tous défauts de pas ou erreurs de
mesure dus au jeu mécanique
■ est sans usure et insensible à la poussière, aux impuretés et aux secousses
■ est facile à utiliser
■ est économique
■ est facile à manipuler.
Système à quatre rangées de billes avec système de mesure intégré
˚C
■ système de mesure incrémentale avec unpoint de référence (EP) ou point de référence multiple (MP)
■ chariot de guidage avec tête de lecture rapportée �
■ rail de guidage avec bande magnétique intégrée �et tôle de protection �
■ système de mesure digitale absolue
■ chariot de guidage avec tête de lecture rapportée �
■ rail de guidage avec bande magnétique intégrée �et tôle de protection �
■ électronique de conversion ASA 510 �
■
1
23
KUVE..-LMST+EPKUVE..-LMST+MP
173
533
4
2
3
1
KUVE..-LMSD
205
021
11
11

3
Electronique de conversion Affichage de la position – Accessoires spéciaux
■ reliée directement à la tête de lecture ■ appareil à 1 axe
■ affichage à 12 caractères et programmable individuellement
■ LCD avec grand contraste, matrice à points
■ interprétation de l’informationdes détecteurs magnétiques LMST/LMSD sur l’affichage
■■ ■ ■
■ ■
ASA 510
173
534
SiKO
MA 10/4
205
022
12 12
4
Systèmes à recirculation à quatre rangées de billes avec système de mesure magnétique intégré
Consignes de conception et de sécurité
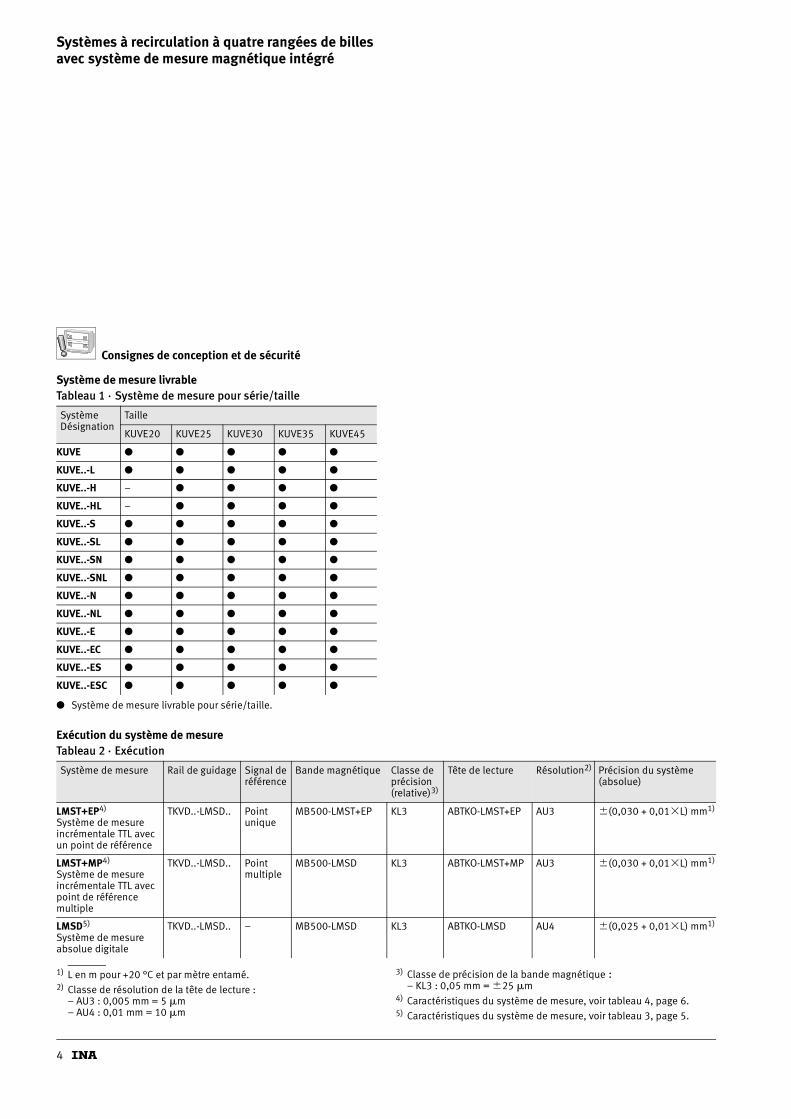
Système de mesure livrable
● Système de mesure livrable pour série/taille.
Exécution du système de mesure
1) L en m pour +20 °C et par mètre entamé.2) Classe de résolution de la tête de lecture :
– AU3 : 0,005 mm = 5 �m– AU4 : 0,01 mm = 10 �m
3) Classe de précision de la bande magnétique :– KL3 : 0,05 mm = �25 �m
4) Caractéristiques du système de mesure, voir tableau 4, page 6.5) Caractéristiques du système de mesure, voir tableau 3, page 5.
Tableau 1 · Système de mesure pour série/taille
SystèmeDésignation
Taille
KUVE20 KUVE25 KUVE30 KUVE35 KUVE45
KUVE ● ● ● ● ●
KUVE..-L ● ● ● ● ●
KUVE..-H – ● ● ● ●
KUVE..-HL – ● ● ● ●
KUVE..-S ● ● ● ● ●
KUVE..-SL ● ● ● ● ●
KUVE..-SN ● ● ● ● ●
KUVE..-SNL ● ● ● ● ●
KUVE..-N ● ● ● ● ●
KUVE..-NL ● ● ● ● ●
KUVE..-E ● ● ● ● ●
KUVE..-EC ● ● ● ● ●
KUVE..-ES ● ● ● ● ●
KUVE..-ESC ● ● ● ● ●
Tableau 2 · Exécution
Système de mesure Rail de guidage Signal de référence
Bande magnétique Classe de précision (relative)3)
Tête de lecture Résolution2) Précision du système (absolue)
LMST+EP4)
Système de mesureincrémentale TTL avec un point de référence
TKVD..-LMSD.. Point unique
MB500-LMST+EP KL3 ABTKO-LMST+EP AU3 �(0,030 + 0,01�L) mm1)
LMST+MP4)
Système de mesure incrémentale TTL avecpoint de référence multiple
TKVD..-LMSD.. Point multiple
MB500-LMSD KL3 ABTKO-LMST+MP AU3 �(0,030 + 0,01�L) mm1)
LMSD5)
Système de mesure absolue digitale
TKVD..-LMSD.. – MB500-LMSD KL3 ABTKO-LMSD AU4 �(0,025 + 0,01�L) mm1)

5
Système de mesure incrémentale de la distance parcourueCaractéristiques générales (figure 1 et tableau 3) :■ Mesure magnétique du déplacement linéaire (incrémentale)
■ KUVE..-LMST+EP avec un point de référence
■ KUVE..-LMST+MP avec un point de référence multiple
■ Capteur magnétique, type MSK 500/1.
Fig. 1 · Système de mesure incrémentale de la distance parcourue
173
53
3a
Tableau 3 · Mesure incrémentale de la distance parcourue
Caractéristiques Données techniques Informations complémentaires
Tension nominale 24 V DC �20% standard
Longueur du câble câble avec bouts dénudés, câble de 2 m(standard)
autres longueurs de câble sur demande
Gaine de câble PUR, résistant aux huiles standard
Couplage de sortie Line Driver (LD) en standard 5 V signal de sortie rectangulaire selon RS422
Signal de référence index périodique (LMST+MP)index fixe (LMST+EP)
–
Résolution 0,005 mm en standard –
Puissance absorbée max. 70 mA jusqu’à 24 V DC sans charge
Signaux de sortie A Quad B 5V TTL –
Vitesse de déplacement max. 6,9 m/s (du capteur magnétique) –
Distance entre bande et capteur max. 1,5 mm sur toute la distance de mesure
Précision du système �(0,030 + 0,01�L) mm [L en m] pour Tu = +20 °C ; [L = longueur par mètre entamé]
Précision de répétabilité �1 incrément = �0,005 mm –
Plage de températures température de fonctionnement –10 °C à +70 °C température de stockage –30 °C à +80 °C
Humidité de l’air 100% d’humidité relative condensation autorisée
Classe d’antiparasitage 3 selon IEC 801

6
Systèmes à recirculation à quatre rangées de billes avec système de mesure magnétique intégré
Système de mesure absolue de la distance parcourueCaractéristiques générales (figure 2 et tableau 4) :■ Mesure magnétique du déplacement linéaire (absolu)
■ KUVE..-LMSD �
■ Electronique de conversion ASA 510 �.
Fig. 2 · Système de mesure absolue de la distance parcourue
2120
5 0
21a
Tableau 4 · Mesure en absolu de la distance parcourue
Caractéristiques Données techniques Informations complémentaires
Tension nominale 24 V DC �20% standard
Longueur du câble 2 m en standard (fixe) entre la tête de lecture et l’électronique de conversion
Longueur de mesure max. 83 m –
Marquage magnétique 1 voie, pas polaire 5 mm –
Détection de la position sans courant, pile au lithium 3 V, durée de vie env. 7 à 10 ans selon la température ambiante
–
Gaine de câble PUR, résistant aux huiles standard
Couplage de sortie au choixou
SSIRS485
standard (selon RS422 A, 1 MHz max.)protocole ASCII
Résolution 0,010 mm, ajustable en interne –
Puissance absorbée �100 mA protection contre l’inversion de polarité
Type de connexion D-SUB 9 pôles –
Boîtier de l’électronique de conversion tôle d’acier galvanisé par électrolyse
Classe d’antiparasitage 3 selon IEC 801
Vitesse de déplacement 6 m/s max. –
Distance entre bande et capteur 2 mm max sur toute la distance de mesure
Précision du système �(0,025 + 0,01�L) mm [L en mm] pour Tu = +20 °C ; [L = longueur par mètre entamé]
Précision de répétabilité �1 incrément = �0,010 mm –
Plage de températures température de fonctionnement 0 °C à +60 °C température de stockage –30 °C à +70 °C
Humidité de l’air(électronique de conversion)
max. 95% d’humidité relative condensation non autorisée
Classe de protection(électronique de conversion)
IP 40 selon DIN VDE 0470 sigle de contrôle CE
Masse env. 550 g électronique de conversion + câble + tête de lecture

7
Système de mesure de la distance parcourueavec un point de référence KUVE..-LMST+EPLa bande magnétique avec un point de référence fixe n’est valable que pour LMST+EP (figure 3).
Système de mesure de la distance parcourueavec un point de référence multiple KUVE..-LMST+MPSystème de mesure de la distance parcourue, digitale absolue – KUVE..-LMSDLa bande magnétique avec un index périodique (tous les 5 mm) est utilisée pour le système de mesure LMST+MP et LMSD(figure 4).
Informations nécessaires pour la commandePour la commande, il faut indiquer :■ le type de système de mesure (tableau 2, page 4)
– incrémentale (LMST) avec point de référence unique ou multiple (EP ou MP)
– absolue digitale (LMSD)
■ la position de la tête de lecture à gauche (L) ou à droite (R), (figure 3 et figure 4) par rapport à la face de référence
■ le signal de référence pour la version LMST– point unique (EP)– point multiple (MP)
■ la position du point de référence (EP) en mm (figure 3)– EP = distance de l’extrémité du rail de guidage jusqu’au
centre du chariot– E = distance de l’extrémité du rail de guidage jusqu’au
point de référence (sera calculée par INA)
■ la résolution de la tête de lecture– AU3 = 5 �m pour LMST (EP et MP)– AU4 = 10 �m pour LMSD
■ la classe de précision de la bande magnétique– KL3 = 0,05 mm.
Fig. 3 · Position du point de référence pour KUVE..-LMST+EP
Fig. 4 · Position de la tête de lecture (R ou L) par rapport à la face de référence KUVE..-LMST+MP, KUVE..-LMSD
Point de référence (figure 3)Respecter la direction des flèches lors du montage. La flèche sur la bande magnétique et sur la tête de lecture doit pointer dans la même direction (figure 3).
●▼
R L
EP EP
E Eou
Face de référenceFace de référence
205
02
3
R Lou
Face de référenceFace de référence20
5 0
24
8
Systèmes à recirculation à quatre rangées de billes avec système de mesure magnétique intégré
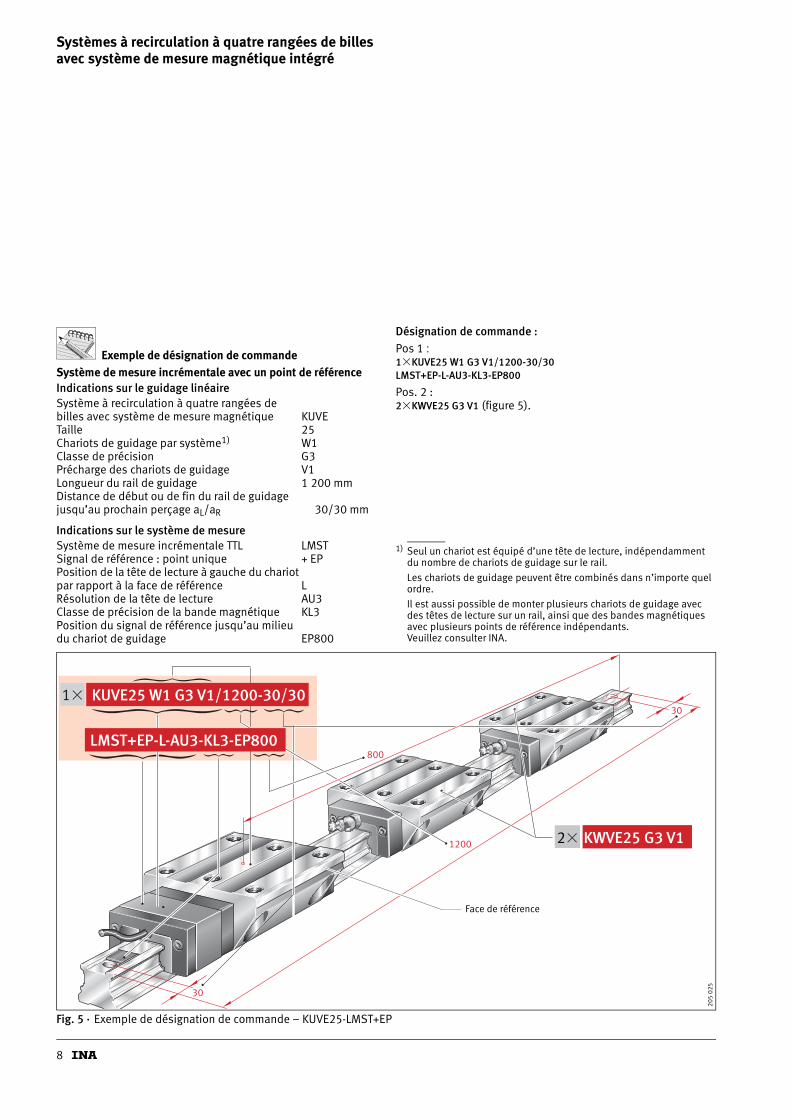
Exemple de désignation de commandeSystème de mesure incrémentale avec un point de référence
Désignation de commande :Pos 1 :1�KUVE25 W1 G3 V1/1200-30/30 LMST+EP-L-AU3-KL3-EP800
Pos. 2 :2�KWVE25 G3 V1 (figure 5).
1) Seul un chariot est équipé d’une tête de lecture, indépendamment du nombre de chariots de guidage sur le rail.
Les chariots de guidage peuvent être combinés dans n’importe quel ordre.
Il est aussi possible de monter plusieurs chariots de guidage avec des têtes de lecture sur un rail, ainsi que des bandes magnétiques avec plusieurs points de référence indépendants.Veuillez consulter INA.
Fig. 5 · Exemple de désignation de commande – KUVE25-LMST+EP
Indications sur le guidage linéaireSystème à recirculation à quatre rangées de billes avec système de mesure magnétique KUVETaille 25Chariots de guidage par système1) W1Classe de précision G3Précharge des chariots de guidage V1Longueur du rail de guidageDistance de début ou de fin du rail de guidage jusqu’au prochain perçage aL/aR
1 200 mm
30/30 mm
Indications sur le système de mesureSystème de mesure incrémentale TTL LMSTSignal de référence : point unique + EPPosition de la tête de lecture à gauche du chariot par rapport à la face de référence LRésolution de la tête de lecture AU3Classe de précision de la bande magnétique KL3Position du signal de référence jusqu’au milieu du chariot de guidage EP800
KUVE25 W1 G3 V1/1200-30/30
1200
30
30
800LMST+EP-L-AU3-KL3-EP800
1�
KWVE25 G3 V12�
Face de référence
205
025

9
Système de mesure incrémentale avec point de référence multiple
Désignation de commande :Pos 1 :1�KUVE25 W1 G3 V2/1200-30/30 LMST+MP-L-AU3-KL3
Pos. 2 :1�KWVE25 G3 V1 (figure 6).
1) Seul un chariot est équipé d’une tête de lecture,indépendamment du nombre de chariots de guidage sur le rail.
Les chariots de guidage peuvent être combinés dans n’importe quel ordre.
Fig. 6 · Exemple de désignation de commande – KUVE25-LMST+MP
Indications sur le guidage linéaireSystème à recirculation à quatre rangées de billes avec système de mesure magnétique KUVETaille 25Chariots de guidage par système1) W1Classe de précision G3Précharge des chariots de guidage V2Longueur du rail de guidageDistance de début ou de fin du rail de guidage jusqu’au prochain perçage aL/aR
1 200 mm
30/30 mm
Indications sur le système de mesureSystème de mesure incrémentale TTL LMSTSignal de référence : point multiple ;au moyen d’un commutateur externe,on peut définir une position de référence modifiable avec un pas polaire de 5 mm
+ MP
Position de la tête de lecture à gauche du chariot par rapport à la face de référence LRésolution de la tête de lecture AU3Classe de précision de la bande magnétique KL3
KUVE25 W1 G3 V2/1200-30/301�
1200
30
30
LMST+MP-L-AU3-KL3
KWVE25 G3 V11�
Face de référence
205
027
10
Systèmes à recirculation à quatre rangées de billes avec système de mesure magnétique intégré
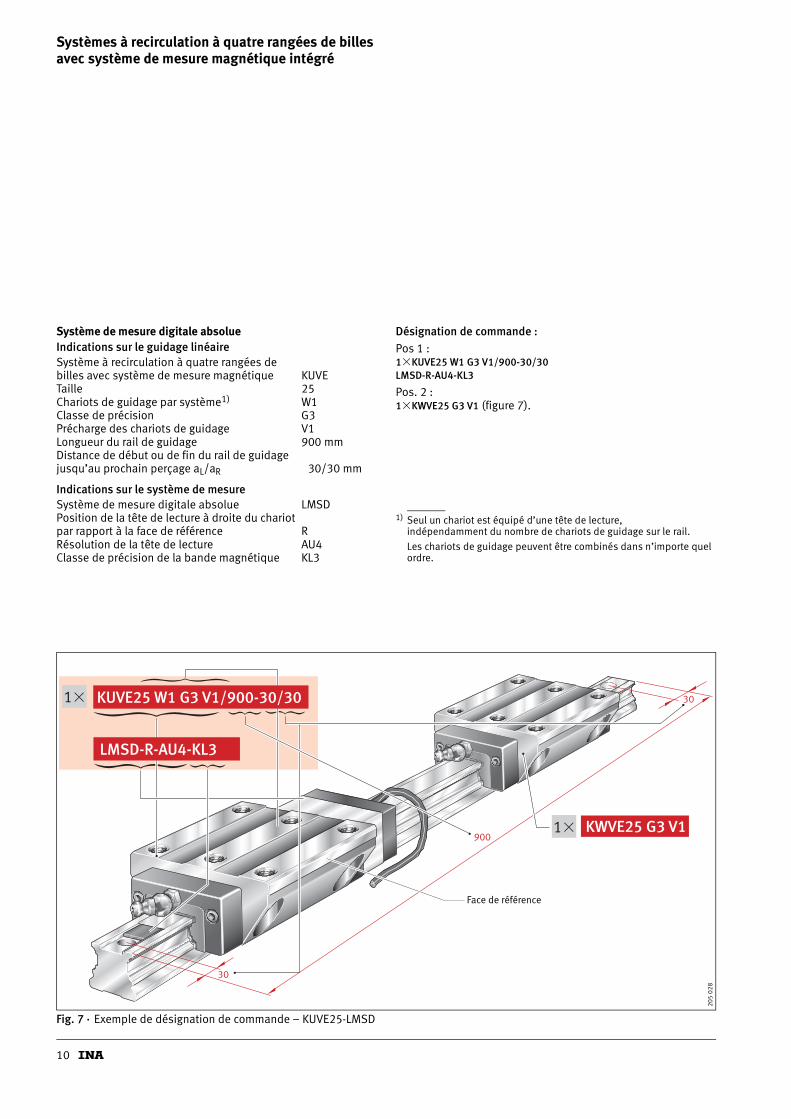
Système de mesure digitale absolue Désignation de commande :Pos 1 :1�KUVE25 W1 G3 V1/900-30/30 LMSD-R-AU4-KL3
Pos. 2 :1�KWVE25 G3 V1 (figure 7).
1) Seul un chariot est équipé d’une tête de lecture,indépendamment du nombre de chariots de guidage sur le rail.
Les chariots de guidage peuvent être combinés dans n’importe quel ordre.
Fig. 7 · Exemple de désignation de commande – KUVE25-LMSD
Indications sur le guidage linéaireSystème à recirculation à quatre rangées de billes avec système de mesure magnétique KUVETaille 25Chariots de guidage par système1) W1Classe de précision G3Précharge des chariots de guidage V1Longueur du rail de guidageDistance de début ou de fin du rail de guidage jusqu’au prochain perçage aL/aR
900 mm
30/30 mm
Indications sur le système de mesureSystème de mesure digitale absolue LMSDPosition de la tête de lecture à droite du chariot par rapport à la face de référence RRésolution de la tête de lecture AU4Classe de précision de la bande magnétique KL3
1�
900
30
30
KUVE25 W1 G3 V1/900-30/30
LMSD-R-AU4-KL3
KWVE25 G3 V11�
Face de référence
205
02
8

11
Systèmes à recirculation à quatre rangées de billes avec système de mesure magnétique intégréSéries KUVE..-LMST
KUVE..-LMSD
1) L = longueur standard du système à recirculation de billes (voir le catalogue INA Guidages sur rails profilés « 605 »).
Tableau de dimensions (en mm)
SystèmeDésignation
Taille
KUVE20 KUVE25 KUVE30 KUVE35 KUVE45
Dimensions
B Lm L H1 B Lm L H1 B Lm L H1 B Lm L H1 B Lm L H1
KUVE
40,6 45 1) 26,6 46 45 1) 30,5 58 48 1) 37,5 68 48,6 1) 43,5 84,6 49,7 1) 51,5
KUVE.-.L
KUVE..-H
KUVE..-S
KUVE..-SN
KUVE..-N
KUVE..-E
KUVE..-EC
KUVE..-ES
KUVE..-ESC
KUVE..-LMST, KUVE..-LMSD
L L1)
B
H1
m
173
54
0
12
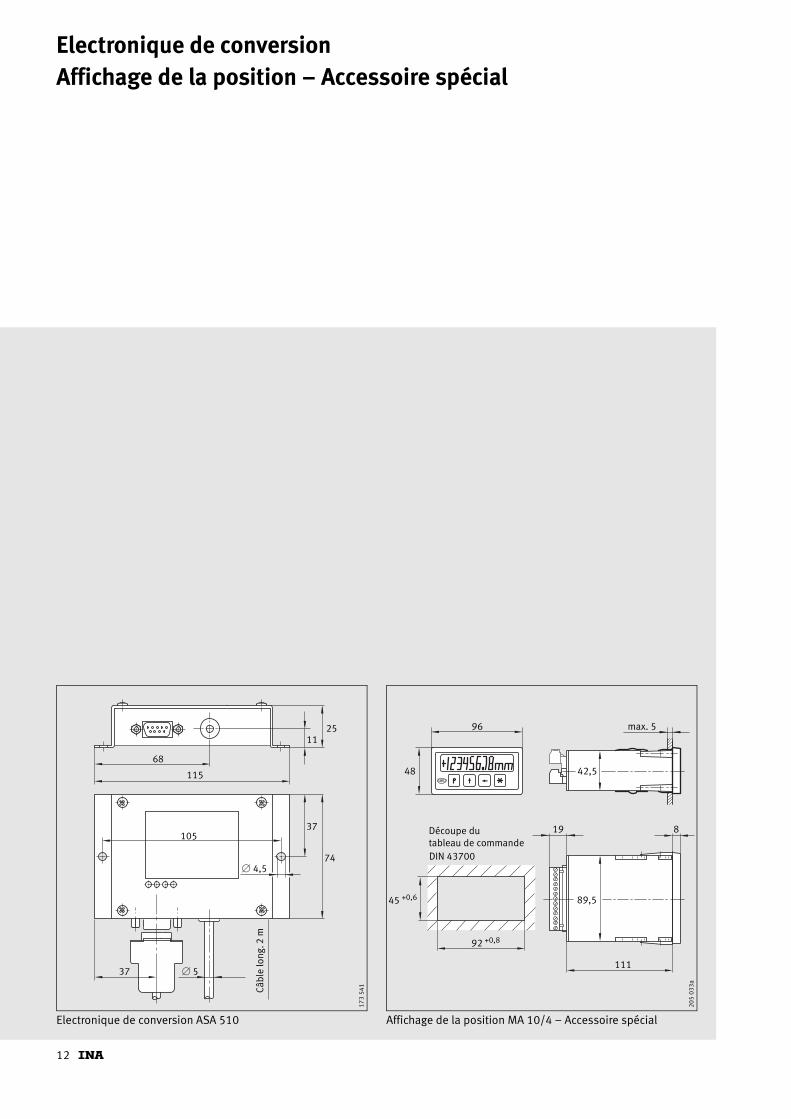
Electronique de conversionAffichage de la position – Accessoire spécial
Electronique de conversion ASA 510 Affichage de la position MA 10/4 – Accessoire spécial
25
68
115
11
37
74
� 537
� 4,5
2 m
105
Câbl
e lo
ng.
173
541
SiKO
96
45
max. 5
48 42,5
89,5
19 8
111
+0,6
92 +0,8
DIN 43700
Découpe dutableau de commande
205
033a

13
Tableau de dimensionsElectronique de conversionAffichage de la position – Accessoire spécial
▲

Schaeffler France
93 route de Bitche
BP 30186
67506 Haguenau Cedex
Téléphone +33 (0)3 88 63 40 50
Télécopie +33 (0)3 88 63 40 51
Internet www.fr.schaeffler.com
Ce document a été soigneusement
composé et toutes ses données vérifiées.
Toutefois, nous déclinons toute respon-
sabilité en cas d’erreurs ou d’omissions.
Nous nous réservons tout droit de
modification.
© Schaeffler KG · 2006, mars
Aucune reproduction, même partielle,
n’est autorisée sans notre accord
préalable.
MAI 59 F-FMA
TNR
0286
5252
5-00
00/M
AI 5
9 F-
F 03
063
· Im
prim
é en
Alle
mag
ne ·
Sch
aeff
ler F
ranc
e, s
.a.s
. au
capi
tal d
e 27
721
600
A, R
CS B
568
504
161









![Mesure et instruments de mesure (1960) [Dunod].pdf](https://static.fdocuments.net/doc/165x107/577cd1601a28ab9e789449c9/mesure-et-instruments-de-mesure-1960-dunodpdf.jpg)








