Synthesizing an Adjustable Lower-Limb Exoskeleton Device ...
52
Synthesizing an Adjustable Lower-Limb Exoskeleton Device For Clinical Rehabilitation A Major Qualifying Project Submitted to the Faculty of Worcester Polytechnic Institute in partial fulfillment of the requirements for the Degree in Bachelor of Science in Robotics Engineering by Brian Flynn June 2016 Professor Yiming Rong, Advisor Professor Pradeep Radhakrishnan, Co-Advisor Keywords: Exoskeleton, Synthesis, Dynamics
Transcript of Synthesizing an Adjustable Lower-Limb Exoskeleton Device ...

Synthesizing an Adjustable Lower-Limb Exoskeleton Device For
Clinical Rehabilitation
A Major Qualifying ProjectSubmitted to the Faculty of
Worcester Polytechnic Institutein partial fulfillment of the requirements for the
Degree in Bachelor of Sciencein
Robotics Engineeringby
Brian Flynn
June 2016
Professor Yiming Rong, Advisor
Professor Pradeep Radhakrishnan, Co-Advisor
Keywords: Exoskeleton, Synthesis, Dynamics

Abstract
More than 795,000 people in the United States have a stroke every year [1]. Neurological damageoften occurs as a result of having a stroke and can affect the individuals’ ability to walk without anassistive device or extensive rehabilitation. Rehabilitative overground gait training is performed by thepatients to assist in re-learning how to walk in a healthy manner. Mobile exoskeletons, such as theHybrid-Assistive Limb (HAL) [2][3] and ReWalk [4][5] can be utilized during rehabilitation to assist inwalking by offering body weight compensation support, additional torque at the joints when necessary,and programmed healthy gait movements.
Clinical studies to determine the ease of use and effectiveness of rehabilitative exoskeletons are oftenperformed, such as with the H2 [6], the HAL [2][3], and the ReWalk [4][5]. The results of such trials arequalified by the sample patients’ determination of how easy to use and comfortable the device was, aswell as whether the patients improved their walking speed or fluidity, or decreased compensation by poorgait posture over the span of the testing trials. Calculated and measured kinematic and dynamic data,however, are seldom the focus of viability reports or articles regarding the effectiveness of rehabilitativeexoskeletons.
A mechanical body with a number of links and joints can be analyzed with forward and inversekinematics and dynamics techniques, as well as by utilizing the bond graph method. These methods arecurrently being applied to the design of an adjustable; lower-limb exoskeleton for clinical gait rehabili-tation. It is particularly important to quantify the effects of a device under the influence of numerousinternal and external forces with the ability to have its dimensions altered. The benefits of these variousmethods are explored in this report.
i

Contents
1 Introduction 1
2 Literature Review 22.1 Exoskeletons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1.1 State of the Art . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2 Emulating Human Anatomy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2.1 Joints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2.2 Muscles & Tendons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Exoskeleton Design Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3.1 Anthropomorphic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3.2 Non-Anthropomorphic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3.3 Pseudo-Anthropomorphic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.4 Methods of Actuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.4.1 Motors & Servos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.4.2 Pneumatic Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.4.3 Air Muscles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.5 Testing & Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.5.1 Kinematic Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.5.2 Dynamic Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.5.3 Gait Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.5.4 Data Acquisition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.6 Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Project Strategy 133.1 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Conceptual Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.3 Preliminary design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.4 Prototyping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.5 Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4 Final Design & Validation 174.1 Final Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.1.1 Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5 Design Verification 195.1 Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.2 Computation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.3 Results of Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.4 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6 Alternative Designs 226.1 Needs Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226.2 Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226.3 Feasibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226.4 Design Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226.5 Decision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7 Cost Analysis 247.1 Exoskeleton Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247.2 Alternative Design Projected Cost Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.2.1 Motors & Servos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247.2.2 Pneumatics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257.2.3 Air Muscles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
ii

8 Discussion 26
9 Conclusions & Recommendations 279.1 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
9.1.1 Frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279.1.2 Joints & Degrees of Freedom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279.1.3 Actuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279.1.4 Bond Graph Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
10 Appendix 3310.1 Arduino Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
10.1.1 Simple Prototype Closed-loop Feedback Controller . . . . . . . . . . . . . . . . . . . . 3310.2 MATLAB Scripts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
10.2.1 Solve Forward and Inverse Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . . 3510.2.2 Solve Inverse Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
10.3 Results of Theoretical Dynamic Analysis of Exoskeleton During Operation . . . . . . . . . . . 4310.4 Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
iii

List of Figures
1 Anthropomorphic [7] (Left), Pseudo-Anthropomorphic [8] (Middle), and Non-Anthropomorphic[7] Exoskeleton Designs (Right) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Two-Dimensional Double Pendulum Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 Graphic Representation of Phases in a Healthy Gait Cycle [9] . . . . . . . . . . . . . . . . . . 84 Graphic Representation of Hip and Knee Angles over Percent of Phases in a Healthy Gait
Cycle [10] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85 Pencil Sharpener System Free Body Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 106 Pencil Sharpener System Word Bond Graph . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117 Pencil Sharpener System Causal Bond Graph . . . . . . . . . . . . . . . . . . . . . . . . . . . 118 Closed-Loop Feedback Controller Block Diagram Utilizing PID Controls [11] . . . . . . . . . 129 Conceptual Exoskeleton Design Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1410 Preliminary Exoskeleton Design Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1511 Initial Small-Scale Exoskeleton Prototype with VEX components (Left), First Small-Scale
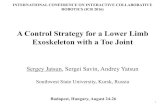
Prototype Model (Middle), Revised Small-Scale Prototype Model (Right) . . . . . . . . . . . 1612 Top Right Angled View of Aluminum 80/20 R© Exoskeleton Frame Model . . . . . . . . . . . . 1713 Full-Scale Exoskeleton Prototype Left Angled View with Knee Bent (Left), Left Angled View
with Knee straight (Middle), & Right Angled View with Knee Bent (Right) . . . . . . . . . . 1814 Angular Position vs. Time Data for Exoskeleton Model . . . . . . . . . . . . . . . . . . . . . 2015 Angular Velocity vs. Time Data for Exoskeleton Model . . . . . . . . . . . . . . . . . . . . . 2016 Required Actuator Torque vs. Time Data for Exoskeleton Model Under Load . . . . . . . . . 2117 Required Actuator Power vs. Time Data for Exoskeleton Model Under Load . . . . . . . . . 2118 Causal Bond Graph of an Exoskeleton System . . . . . . . . . . . . . . . . . . . . . . . . . . . 2919 Causal Multi Bond Graph of an Exoskeleton System . . . . . . . . . . . . . . . . . . . . . . . 30
iv

List of Tables
1 Approximate Percent of Stride Completion with Corresponding Joint Angle Positions DuringOne Cycle of a Healthy Gait . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Ziegler-Nichols PID Controller Tuning Method [12] . . . . . . . . . . . . . . . . . . . . . . . . 113 Cost of components purchased from 80/20 R© Inc. . . . . . . . . . . . . . . . . . . . . . . . . . 244 Time & Joint Position vs. Joint Angular Velocity . . . . . . . . . . . . . . . . . . . . . . . . . 445 Time & Joint Position vs. Joint Angular Acceleration . . . . . . . . . . . . . . . . . . . . . . 446 Time & Joint Position vs. Joint Torque Requirements . . . . . . . . . . . . . . . . . . . . . . 457 Time & Joint Position vs. Joint Power Requirements . . . . . . . . . . . . . . . . . . . . . . . 458 Nomenclature Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
v

1 Introduction
Locomotor training is an important step in the rehabilitation of patients who have suffered partial or completeparalysis due to a spinal cord injury or neurological damage. This is required in order to re-train thenervous system to perform certain tasks, as well as to reverse or reduce the amount of muscle atrophyand bone degeneration. Muscle atrophy and bone degeneration generally occur after extended periodsof physical inactivity or immobilization. Over time, when there is no load especially on the lower limb,the bones weaken and are unable to bear the weight of the upper body, a process referred to as bonedegeneration, or osteoporosis [13]. Similarly, the muscles around the region in consideration will beginto deteriorate in a process referred to as muscular atrophy [14]. In order to combat these on the humanstructure, physiotherapists use assistive tools such as treadmills [15] [16] to mobilize the patient, introduceloads on joints and bones, and exercise the muscles. These tools are used to retrain the body and the nervoussystem to practice walking, help minimize pain and swelling due to injury, and assist in improving the rangeof movement of joints. This process of training is usually referred to as gait training and involves having apatient walk, often on a bodyweight supporting treadmill device, while a physiotherapist will correct certainmotions until the patient can walk normally with a gait comparable to that of a healthy person [17].
Physiotherapists spend a lot of time with each patient and need to be strong enough to support themto provide assistance and prevent injury during rehabilitation. In order to aid physiotherapists and toimprove the speed and effectiveness of rehabilitation, robot-assisted therapy can be used that involves usinga mechanical or an electromechanical device during locomotor training. There are numerous forms of suchdevices such as the Pelvic Assist Manipulator (PAM) which resembles a static frame that supports thepatient as in the work by Ichinose et al. where the device can support the weight of the patient and promotea healthy walking gait [18]. Another type of device is the exoskeleton device, such as the ReWalk [19], whichis affixed to the user and is driven by muscle signal inputs. This device is usually customized to fit thepatient. Another design of interest is the Robot Suit Hybrid Assistive Limb (HAL) [20]. In a clinical setting,any one device is going to be used by many patients, so adjustability becomes a very important criterion.It is necessary that the device be able to accommodate a large number of patients with varying body types.Although the ReWalk exoskeleton [19] is custom made to fit each client, it is not necessarily practical to get adevice for each individual, which increases the related health costs. The Robot Suit HAL is more adjustablethan the ReWalk in that its three base sizes range for heights between 145 centimeter and 185 centimetertall individuals. Although the range is broad and the lower and the upper leg components are adjustableby 6 centimeters and 9 centimeters respectively, they may not meet the needs of very tall patients over 185centimeters, or children under 145 centimeters. Therefore, there is a need for an exoskeleton device that ishighly adjustable and can cover a broad range of height and body types for repeated use in a clinical setting.
This project focuses on designing a lower-limb exoskeleton device with adjustability and cost-effectivenessfor clinical rehabilitation as its main focus areas. The expectation is that this device will be transferablebetween patients, and will provide an effective and safer fit while the cost remains low enough such thethe device is not difficult for clinical rehabilitation centers to obtain. The resulting design will be analyzedusing kinematic and dynamic methods to predict its behavior during use in order to understand the differentrequirements that need to be met in order to effectively actuate the device and perform locomotion.
1

2 Literature Review
2.1 Exoskeletons
An exoskeleton is a wearable, robotic device that assists a user by providing additional power at the joints.A rehabilitative exoskeleton is a device whose primary goal is to assist in the rehabilitation of a patient witha disability. Another type of exoskeleton is one designed to augment the abilities of the individual wearingthe device. Exoskeletons designed to assist disabled individuals can be either purely rehabilitative devicesintended for use in a clinical setting, such as the LOPES [21] exoskeleton, or can be used for both clinicaland personal use such as the ReWalk [19] exoskeleton. Devices designed to augment fully-abled individualscan have use in medical, industrial and military fields depending on their design [22]. Depending on theirintended use, they may have control methods varying from force-feedback sensing, electromyography (EMG)based skeletal muscle signal sensing, or direct automated control with no physical input from the user or acombination of multiple techniques.
2.1.1 State of the Art
The MIT Exoskeleton [23] does not use any actuators, and instead relies on the energy stored in springs.Based on an analysis of the kinetics and kinematics of human walking, springs and dampers were chosen inorder to develop a system that would release energy stored in the springs at specific points in the phases ofthe walking gait. This model has a very low weight and power cost, as the quasi-passive device is controlledby sensory information from strain gauges on the shin, and a potentiometer on the knee. Unfortunately, itappeared that this device also put restrictions on the wearer that increased the metabolic cost of certainactions such as weighted travel [24].
The full-body hybrid assistive leg (HAL-5) exoskeleton [20] is an exoskeleton device that utilizes a com-bination of active and passive joints. The ankle is passively powered while the knee and the hip joints arepowered by a dc motor with harmonic drive located at the joint. The HAL-5 uses a multitude of sensingmechanisms including “skin-surface electromyographic (EMG) electrodes placed below the hip and above theknee on both the front, and the back sides of the wearer’s body, potentiometers for joint angle measurement,ground reaction force sensors, and a gyroscope and accelerometer mounted on the backpack for torso postureestimation [20][24].” The Robot Suit HAL has medical [25] and non-medical [26] use models. Each unit has3 available sizes which can be adjusted for hip width, leg length, and foot size. The upper leg lengths canbe adjusted in 4 – 1.5 centimeter increments and the lower leg length can be adjusted in 6 – 1.5 centimeterincrements.
The ReWalk [19] is a primarily rehabilitative lower-limb exoskeleton device similar in composition to thelower half of the HAL exoskeleton. The device focuses on actuating a knee and hip joint, and accomplishesthis goal with the use of multiple one degree of freedom (DOF) actuators. The ReWalk is a lightweightsystem equipped by wearing a harness around the waist, and a backpack where components such as themotors for actuation. EMG sensing components are located alongside the legs, and the signals from whichcontrol actuation. This is an appropriate method for a patient who does not have control of their own limbsbecause it does not require them to physically exert any force on the device [19] in order to generate aresponse. Each model is customized to fit the client, and the personal unit has a broad range of parametersthat can be changed by therapists as the rehabilitation progress progresses, reducing the input from theactuators to facilitate muscle regeneration in the user. This method of fitting the device to a single patient,however, is not ideal for use in a clinical setting with multiple patients who may benefit from rehabilitationwith the device.
Two additional rehabilitative exoskeleton devices, the Lower Extremity Powered Exoskeleton (LOPES)[21] and the Active Leg Exoskeleton (ALEX) [27], incorporate treadmill-walking into their design and prac-tice. The use of a treadmill during rehabilitation allows for a device which can be made stationary inconjunction with having the ability to fully control the walking speed of the patient on two levels. TheLOPES features full body-weight support which is beneficial for the patient as well as for the actuators onthe device. The ALEX also supports a portion of its own weight by use of a boom, and therefore does nothave to account for the weight of certain components in the dynamics of the gait emulation.
2

2.2 Emulating Human Anatomy
An exoskeleton device can only be practical if it is mechanically compatible with the human anatomy;specifically the lower extremities in this case. The user must not have restricted movement, and should beable to move safely. In order to satisfy this requirement, biomechanical properties of the body such as jointlocation, limb length, and the maximum range of motion for a particular joint on a patient must be takeninto account when designing an exoskeleton device [23].
2.2.1 Joints
The three joints to consider for a lower limb exoskeleton are the hip, knee and ankle joints. The hip jointhas three rotational DOF, and is a ball-and-socket type joint . The knee has two rotational DOF and isconsidered a condyloid joint, but is often reduced to a one DOF joint because the twisting rotation of thejoint is very limited and not necessarily vital in locomotion [28]. The ankle is often considered to be a oneDOF hinge joint, but is also capable of very limited rotations in two other planes since it is used to makecontact with the ground. In the case of the ankle joint, it is often driven to rotate along one plane, while thetwisting and bending motions are accounted for in another form, possibly springs or dampers, in order tomake proper contact with uneven surfaces [23]. To create a system that imitates these characteristics, oneor more types of actuators can be utilized within an exoskeleton system.
2.2.2 Muscles & Tendons
Tendons have a property referred to as slack length which is the length where the tendon begins to exhibitelastic properties when stretched, giving way to compliance in the musculoskeletal system [29]. The musclesthemselves generate force by shortening and pulling a bone towards the point of origin of the muscle bymeans of the tendon. The performance of a muscle is determined by its tension production and the speed atwhich it shortens [30]. Unlike mechanically actuated joints, many muscle fibers work together to actuate alimb and manipulate the limb to perform adduction, abduction, flexion, extension, and rotation, dependingon how many DOF the joint being manipulated has.
2.3 Exoskeleton Design Models
There are several different standard design approaches for creating an exoskeleton device. Anthropomorphicmodels imitate human anatomy most directly, Non-anthropomorphic models will attach to part of the bodybut not necessarily imitate the joint structure, limb lengths, or orientation of target anatomy, while a pseudo-anthropomorphic model shares attributes with both [28].
2.3.1 Anthropomorphic
An anthropomorphic exoskeleton, Figure 1 (Left), attempts to match the anatomical structure of the targetas accurately as possible. Both the ReWalk [19] and the Robot suit HAL [20] take on an anthropomorphicdesigns. This is evident in that the upper and lower leg linkages are affixed to the user’s limbs, and thedevice’s hip, ankle, and knee joints are in line with the corresponding human joints. The exoskeleton limblengths need to be the same as the wearer’s limb lengths, or be adjustable to accommodate for variations inuser height [28].
2.3.2 Non-Anthropomorphic
In a non-anthropomorphic exoskeleton, Figure 1 (Right), the architecture may end up not looking like thehuman shape at all. Due to the structure of the design, the exoskeleton may require more joints than arepresent in the human body in order to accomplish reaching necessary configurations. An issue with thistype of configuration is that significant efforts must be made to not direct the operator into a physicallyunreachable configuration. For exoskeletons that can reach an end point via multiple configurations, it isimportant that the components always extend outwards and away from the body and do not follow a paththat will overextend a limb or joint. This requirement adds more complexity to the controller [7].
3

Figure 1: Anthropomorphic [7] (Left), Pseudo-Anthropomorphic [8] (Middle), and Non-Anthropomorphic[7] Exoskeleton Designs (Right)
2.3.3 Pseudo-Anthropomorphic
A pseudo-anthropomorphic exoskeleton refers to a system whose function is kinematically similar to that ofthe target anatomy, but all joints on the device are not necessarily in line with those of the target system. Inthe case of the BLEEX [28] and the IHMC Mobility Assist Exoskeleton [8], flexion and extension of the legabout the hip are controlled by one actuator along the side of the body, while abduction and adduction arecontrolled via a second motor placed behind the body, as can be seen in Figure 1 (Middle). In both cases,the axes of rotation of the artificial joints are in line with the corresponding axes of rotation of the ball jointof the hip, facilitating the range of motion a ball joint might be able to achieve in a scenario where using anactual ball joint may be a complicated an inefficient endeavor. Since the exoskeleton is not connected to theleg, it is also easier to match the size of the unit to different individuals and allow for more free movementof the knee joint during different locomotive actions [28].
2.4 Methods of Actuation
When selecting a method for joint actuation, it is important to consider how well it can imitate the behavior ofthe target anatomy. Methods of joint actuation include motor or servo driven joints, pneumatic or hydraulicactuation, and utilization of artificial muscles, particularly air muscles. Passive actuation methods such asspring-based systems can also be used potentially in conjunction with aforementioned active methods. Theselected method for actuation is largely dependent on constraint factors such as minimum and maximumlinear and rotational force and velocity requirements, as well as space limitations.
The power relations regarding the following methods of actuation are explored within section 2.5.5 - DataAcquisition.
2.4.1 Motors & Servos
Motors and servos can be used to control rotation about one axis at a time. Multiple units can be usedin conjunction to simulate different types of joints, such as the three DOF ball-and-socket hip joint. Onestandard practice involves using multiple motors for hip joints, as seen in the ReWalk [19], in which tworotary actuators are utilized such that their axes of rotation facilitate flexion, extension, abduction andadduction of the leg about the hip joint.
4

2.4.2 Pneumatic Systems
Pneumatic actuators only output linear motion unless coupled with one or more partner mechanisms. Hy-draulic fluid is largely incompressible, and as a result hydraulic actuators have a high degree of control. Thepower output from a hydraulic system can be calculated by multiplying the flow rate by the supply pressure[28]. The Berkeley Lower Extremity Exoskeleton (BLEEX) [28] utilizes hydraulic actuators because of theirhigh power output and small size. Depending on the joint torque necessary within the system, hydraulicand pneumatic actuators are selected based on power and velocity requirements. Pneumatic actuators aresimilar to hydraulic actuators in function, however air has a higher compressibility factor than fluids suchas oil. Pneumatic systems have the advantage of being faster than hydraulic systems and do not require thestorage of fluids other than air. Accompanying fluid pumps and reservoir systems determine the maximumflow rate through the system, storage of fluid, and usage time of the device.
2.4.3 Air Muscles
Air muscles behave similarly to hydraulic and pneumatic systems by shortening in response to being filledand widened buy a fluid. When the fluid is removed from the artificial muscle, the muscle relaxes andreturns to its original length. Artificial muscles generally do not provide significant range of motion as anincrease in girth or circumference of the actuator translates into shortening of the actuator. Similarly to howmuscle groups function, numerous actuators can be used in conjunction with one another to more accuratelyemulate the musculoskeletal system within the human body [31].
2.5 Testing & Analysis
Evaluating the effectiveness of an exoskeleton device designed for use in the rehabilitation of a patient involvestracking the results of the patients’ progress over the course of rehabilitative treatment. It is also importantthat the resulting device is physically capable of the task for which it was designed. This involves performingdynamic and kinematic analyses on the device before it is put into use.
2.5.1 Kinematic Analysis
Preliminary testing involves performing kinematic and dynamic analyses on the proposed design, as wellas the resulting device that is constructed. Performing a kinematic analysis will determine the possiblelocations at which the end effector will end up based on the range of each individual joint. In the case ofan anthropomorphic design, an exoskeleton will have two or three joints. Often the ankle joint is omitted,resulting in a double pendulum problem.
Using equation 1, a forward kinematics analysis can be performed which will show the possible range ofmotion for the end effector, the foot or end joint of the device, which can be compared against actual data.[
xy
]=
[l1cos(θ1) + l2cos(θ1 + θ2)l2sin(θ1) + l2sin(θ1 + θ2)
](1)
Inverse kinematics can be used to take end effector data and determine the required joint position rangesthat the device must be able to reach in order to complete the task. Utilizing equations 2-7, it can bedetermined whether or not the design will meet the range of motion requirements based upon the positionalrequirements of the end effector.
lP =√x22 + y22 (2)
θP = atan2(y2, x2) (3)
θA = acos(l22 − l21 − l2P−2l1lP
) (4)
θB = asin(lP sin(θA)
l2) (5)
5

Figure 2: Two-Dimensional Double Pendulum Diagram
θ1 = θP − θA (6)
θ2 = θB (7)
2.5.2 Dynamic Analysis
Before deciding which actuators will be necessary to adequately actuate a device, the torque and powerrequirements for actuating the linkages within the system must be determined. Utilizing inverse dynamicsmethods, the amount of torque required to actuate a joint attached to linkages with known lengths andweights and physical properties can be calculated. Forward dynamics can also be used to solve kinetic valuesgiven a certain force. This technique is useful in determining whether or not a chosen actuator is appropriate,however it is more efficient to use known data to determine what actuator to choose for a device.
For the application of solving for the torque requirements at joint 1, the hip, and joint 2, the knee, theLagrange-Euler dynamic formulation can be utilized. This process is outlined in equations 8-17.
L(θi, θi) = K − P (8)
Where L is the Lagrangian, K is the Kinetic Energy, P is the Potential Energy, θi is the angular displace-ment of joint i, and θi is the angular velocity of joint i.
τi =d
dt
∂L
∂θi− ∂L
∂θi(9)
Where τi is the torque on joint i
K =
n∑i=1
1
2MiV
Tci Vci +
1
2ωTi Iiωi (10)
6

Where Mi is the mass of link i, Vci is the velocity at the center of link i, V Tci is the transpose of Vci, Ii isthe moment of inertia for link i, ωi is the angular velocity of link i, and ωTi is the transpose of ωi.
V Tci = Jci(θi)θi =
∂xci
∂θ1∂xci
∂θ2∂yci∂θ1
∂yci∂θ2
∂zci∂θ1
∂zci∂θ2
[ dθ1dtdθ2dt
]
(11)Where Jci is the jacobian for the center of link i, and Xci is the displacement of the center of link i.
P =
n∑i=1
MigTXci (12)
Where gT is the transpose of the gravity vector, and Xci is the position of the center of mass of link i.The matrices Xci can be written as follows:
Xc1 =
12 l1cos(θ1)12 l1sin(θ1)
0
=
xc1yc1zc1
(13)
Xc2 =
l1cos(θ1) + 12 l2cos(θ1 + θ2)
l1sin(θ1) + 12 l2sin(θ1 + θ2)0
=
xc2yc2zc2
(14)
The gravity matrix can be represented by:
g =
0gravity
0
(15)
The matrices ωi can be written as follows:
ω1 =
00
θ1
(16)
ω2 =
00
θ1 + θ2
(17)
The inertia matrices Ii can either be solved for, or obtained using a computational modeling softwaresuch as SOLIDWORKS R©.
2.5.3 Gait Analysis
Figure 3 [9] illustrates the stages of a healthy gait cycle. Sets of data obtained from previous studies, suchas those illustrated in Figure 4 [10] in graphical form, can be used to approximate the power and torquerequirements for a system capable of emulating the healthy walking gait.
Table 1 [10] represents a set of data points pertaining to the angular position of both the hip and kneejoints at different stages of the healthy gait cycle, denoted by the percent of completion of the cycle. Fora patient undergoing gait rehabilitation, the time taken to complete one full cycle may be longer than itwould for a healthy individual. The hip joint angle is measured in the counter-clockwise direction from thepositive, horizontal x-axis, while The knee joint angle is measure from the first linkage in the counterclockwisedirection to the second linkage. These angles correspond to θ1 and θ2 for the Hip and Knee joints, respectively,illustrated within Figure 2.
7

Figure 3: Graphic Representation of Phases in a Healthy Gait Cycle [9]
Figure 4: Graphic Representation of Hip and Knee Angles over Percent of Phases in a Healthy Gait Cycle[10]
2.5.4 Data Acquisition
Preliminary analyses can be performed using sets of data such as those contained within Table 1. A fullinverse dynamic gait analysis requires that the duration of one full cycle be known, and at each recordedtime step the angular position is also recorded. In addition to the physical properties of a device capable ofperforming these movements such as weight, dimensional and inertial characteristics, these data can be usedto solve for the required torque at each joint by following the steps within section 2.5.1.
When using a robotic system, gait performance of a patient is recorded both before and after gaitrehabilitation training occurs. Through the process of rehabilitation, the patient is expected to becomemore proficient at walking and more capable of physically performing the actions. By collecting joint angledata from the patient both before and after rehabilitative training, the patient’s ability to walk with ahealthy gait can be tracked and analyzed over time [32].
The strength of actuators can be physically measured using tools such as strain gauges to quantify theactual output forces produced within the system. Additionally, the actual input voltage and current flowingthrough the system can be measured and used to determine the actual actuator output power. Paired withthe measured actuation speed at any time step in the process, by using the relations found in equations18-28,
P (t) =Work
time= F
d
t(18)
That is to say when power is a function of time and is represented in Watts;
P (t) = IV tg = I2R =V tg2
R(19)
8

Table 1: Approximate Percent of Stride Completion with Corresponding Joint Angle Positions During OneCycle of a Healthy Gait
% of Stride Hip Angle (degrees) Knee Angle (degrees)0 256.5 45 257 1110 258.5 2215 260 21.520 263.5 2025 267 17.530 268.5 1435 273 1240 275.5 1045 279 1350 280 2155 278 3360 274 4465 267 5670 262 6175 258 5580 256.5 4185 256 2590 255.5 12.595 256 7100 257 5
For electrical power current (I ) is measured in amperes, resistance (R) in ohms, and voltage (Vtg) involts,
P (t) = Fv (20)
In linear systems force (F ) is measured in Newtons, and velocity (v) is in distance per unit time,
P (t) = τω (21)
In rotational systems torque (τ) is the moment of force, and angular velocity (ω) is measured in radiansper second,
P (t) = pQ (22)
And in fluid systems pressure (p) in pascals and the volumetric flow rate of a fluid through the system(Q) is in volume per unit of time.
In the special case of air muscles [31],
dWin = pdV ol (23)
dWout = Fdx (24)
dWout = dWin (25)
pdV ol = Fdx (26)
9

F = pdV ol
dx(27)
P (t) = pdV ol
dxv (28)
Where (Win) and (Wout) represent Work in and Work out of the air muscle, respectively, (p) is theabsolute internal air pressure, (Vol) is the volume of the air within the air muscle, (x ) is the length of thecontraction of the air muscle, and (v) is the rate of change of the contraction of the air muscle.
The mechanical power being produced from the actuator with a supply from a known electrical powersource can be calculated accurately with measured values. The torque or force output, depending on thetype of actuator, can be solved for and compared to the value measured with tools such as a strain gauge,as well as compared to the values calculated during preliminary testing and analysis. These methods can beused to test the accuracy of analysis methods, as well as to validate claims about whether or not a systemis likely to be efficient.
Additionally, use of the Bond Graph technique can provide additional insight into how much of animpact the different factors contained within the aforementioned relations have on an overall system. TheBond Graph is a graphical representation of the components within a system. In constructing a BondGraph, each component is connected by influences from other components or from sources of flow and effort.Transformations from one type of component, an electrical input, to another, mechanical input, are handledvia transformations and gyrators. These analytical mechanisms allow the analyzer to understand the effecteach component has on each other component by building a system of relations that govern the system [33].A free body diagram of the components within a pencil sharpener is presented in Figure 5. The diagram isgraphically represented by a word bond graph, Figure 6, and then into a fully causal Bond Graph, Figure 7,in which the different efforts, flows and constants can be modeled mathematically.
Figure 5: Pencil Sharpener System Free Body Diagram
In Figure 5, τi represents the torque, ωi is the rotational velocity, ri is the radius, and Ji is the inertiavalue for the rotational component i.
10

Figure 6: Pencil Sharpener System Word Bond Graph
Figure 7: Pencil Sharpener System Causal Bond Graph
2.6 Control
An autonomous or robotic rehabilitative exoskeleton device is controlled via a pre-programmed walking cyclewhere certain factors such as total time of stride can be manipulated. A proportional–integral–derivative(PID) controller is utilized in such cases by comparing the signal from a sensor, such as a potentiometerlocated on the joints being driven, to a target value. The separate proportional, integral and derivativeconstants that control the behavior of the output of the controller can be calculated based on methodsproven to be accurate, or tuned manually until the best behavior for a single device is attained.
Table 2: Ziegler-Nichols PID Controller Tuning Method [12]
Control Type Kp Ti TdP 0.5Ku - -PI 0.45Ku Tu/1.2 -PD 0.8Ku - Tu/8PID 0.6Ku Tu/2 Tu/8
The Ziegler-Nichols method [12] of tuning a PID controller provides a simple table where only certain
11

values need to be plugged in in order to get a fairly accurate controller model. The value Ku is determinedby setting the integral and derivative gain constants to zero, and increasing the proportional gain constantuntil the system reaches begins to oscillate at a constant rate and is in equilibrium. This proportional gainvalue is called the ultimate gain, and is then plugged in to the table to determine a starting point for anappropriate proportional gain value. Tu is then the oscillation period, and is used within the table to solvefor subsequent integral and derivative gain constant values.
A PID controller is a closed-loop feedback controller in which the difference between the current pointand an endpoint is calculated as an error, and fed into proportional, derivative and integral functions toreduce error as time progresses. This is particularly useful in controlling a system where a target position isthe goal. Depending on how the individual gain values are tuned, the speed and precision of the controllerwill vary, however with a properly tuned controller, the system will approach the desired position at a rateinversely proportional to the size of the error and reach a steady state value such that there will be littleoscillation within the system [34].
Figure 8: Closed-Loop Feedback Controller Block Diagram Utilizing PID Controls [11]
In Figure 8, the error value, et, is used to calculate a control signal that is fed to the process drivingthe mechanism. The new input value is read and the process continues until the error is zero, or within anacceptable range depending on desired results, accuracy and efficiency.
Practical usage of this type of controller within a robotic system is desirable as it will more closelyimitate the behavior of a natural human joint and reduce the possibility of injury due to too quick or sharpunnatural movements during the locomotive process especially involving individuals with a disability orphysical impairment.
An EMG sensing controller detects the intent of movement by means of sensing the electric potentialdifference between an activation point in a muscle, and a neutral spot [35]. This method also utilizes afeedback loop in which the current joint position is compared to the strength of the signal sensed frommultiple muscle groups. The larger the difference is between the strength of signals in opposing muscles,the faster the device will move. When the difference in signals returns to a baseline value, that is that thedifference between the neutral area signal and the activation point in the muscle is zero, the device willmaintain its position [35].
12

3 Project Strategy
3.1 Problem Statement
Use of exoskeletons during clinical rehabilitation are effective in assisting with the rehabilitative progress ofindividuals incapable of performing locomotive functions due to nerve, brain, or muscle damage. Utilizing amechanical device in conjunction with standard rehabilitative practices also assist rehabilitative specialistsin performing certain repetitive or simple tasks that do not necessarily require the expertise of a professional,allowing them to focus their efforts where they are most effective [36][17].
Exoskeleton devices such as the ReWalk [19] and HAL [20][24] have been developed for use in clinicalsettings as well as for personal use, while the LOPES [21] and ALEX [27] were developed primarily forclinical use. Locomotive rehabilitation and gait training facilities would benefit from having a low-cost,effective mechanical device that could be used by a broad spectrum of patients to increase consistency amongpatients, as well as reduce the workload of, or increase the effectiveness of professional rehabilitative workers.If certain tasks can be performed by an exoskeleton device, more patients can also be treated effectively overa period of time as the clinical workers will be required to spend less time will each individual patient, whilestill maintaining the same level of productiveness and efficiency.
The purpose of this project was to design an adjustable, robotic, lower-limb exoskeleton for performingclinical rehabilitative gait training for disabled individuals. The device will be adjustable along the lengthsof the linkages between each joint, such that it can be utilized as a major component of gait training for abroad spectrum of patients possessing varied body profiles. Heavy focus is placed upon efficient emulationof the actuation of the hip and knee joints, as well as movement of the patients’ thigh and shank withrespect to time in a manner that mimics a healthy gait during locomotion. It is important to ensure thatthe device is financially accessible to those who would benefit from its use, particularly clinical operations,although no specific limitations have been set at this stage. Any potential costs must be justified by theoverall effectiveness of the exoskeleton device.
In addition to constructing a device, a kinematic and dynamic analysis of the design under expectedconditions must take place. Using MATLAB R© software, an evaluation of the system simulating anticipatedbehavior can be performed to acquire expected power, velocity and torque requirements at any given stepin the actuation process. This information is utilized to determine the most effective actuation method, aswell as the actuator configuration, gearing or any modification that may be necessary. A script should bedeveloped to accept a predetermined table of position and time data for each joint, as well as the dimensionsand weights of linkages and other components to generate data pertaining to the dynamics of the systemunder load and during actuation.
3.2 Conceptual Design
The original conceptual design of the exoskeleton, Figure 9, consisted of a system with 3 links and 5 joints.Only two DOF would be actuated on the mechanism; the flexion and extension of the upper and lower legsabout the knee and the hip. Rotation, abduction and adduction of the leg about the hip would be passiveand restricted by springs, as would the flexion and extension of the foot about the ankle.
The device would be affixed to the back and waist user via an external backpack frame with straps tohold it to the user, as well as at the feet in order to drive the leg’s end effector to produce locomotion.In addition, the leg linkages could be strapped to the legs of the wearer to assist in guiding them duringlocomotion.
Since the actuation of the ankle does provide force that facilitates normal locomotion, a spring-latch typesystem was envisioned such that it would not be necessary to attach another motor within limited space toactuate the ankle joint. During certain portions of the gait cycle, the springs would provide a tensile force atthe heel on the device, pushing the toe down and subsequently the leg off of the ground. Due to the natureof the exoskeleton device as one assisting individuals with potentially very weak muscles or nerve damage, itis critical that the mechanism generates enough pushing force to support the user and prevent further injuryby allowing the foot to buckle under the weight of the individual and device. In general, the ankle joint onthe device must be restricted during certain phases of the gait cycle to provide support, and allow the footto flex or extend during other phases to produce force and push off of the ground.
13

Figure 9: Conceptual Exoskeleton Design Diagram
Allowing abduction and adduction of the leg about the hip joint is a compliance measure to facilitate thenatural side to side swing of an individual during locomotion. Springs would be used to direct the legs intoa fully vertical position, while allowing the individual to sway side to side slightly. Mechanical limitationswould be imposed to prevent the user from falling over or leaning dramatically to one side.
Additionally, rotation of the leg would be allowed about a rotary joint along the first link of the device.Rotation would also be restricted to within the normal range of the rotation of a leg about the hip. Springswould be utilized to direct the leg to remain centered, and would assist in facilitating turning while walking.
A large portion of focus was to be placed on adjustability such that a broad spectrum of individuals couldutilize the device. It is not sufficient that a device only be suitable for one individual in an environment wheremany patients require the same type of treatment. By making the upper and lower leg linkages adjustable inlength, individuals with varying heights could all utilize the same device after minor adjustment. Similarly,the distance between each of the devices legs would be adjustable to allow individuals with varying hipwidths.
3.3 Preliminary design
An early model designed in SOLIDWORKS R©, Figure 10, depicts the left half of a lower-limb exoskeletonwith 5 DOF; rotation, flexion, extension, adduction and adduction of the whole leg about the hip, and flexionand extension of the lower leg and foot about the knee and ankle, respectively. In addition, each of the leglinkages are able to extend vertically by means of a rack and pinion type mechanism. Not shown in thediagram are exact locations for spring systems that would restrict the rotation, adduction and abductionof the leg about the hip, as well as the flexion and extension of the foot about the ankle. Each DOF isrepresented by a dotted orange line showing the axes of rotation. The inner blocks and rods represent thelocation of an actual leg and its corresponding joints, and the back plate is represented by a thin rectangularblock which would also likely be the location where a battery or other power source would be supported.
14

Figure 10: Preliminary Exoskeleton Design Diagram
This design adopted the same pseudo-anthropomorphic style as the BLEEX [28] and the IHMC MobilityAssist Exoskeletons [8]. The hip maintains 3 DOF via 3 separate joints to emulate the behavior of the balland socket type hip joint.
The points of contact between the device and the user are via the back plate at the hip and lower back,as well as underneath the foot. The device would be worn like a backpack and the user would stand uponthe foot plates which strap to the users’ feet and carry them through locomotion.
3.4 Prototyping
The earliest prototype was constructed with wooden and metal frame components and actuated by VEXmotors using an Arduino microcontroller. The leftmost structure illustrated within Figure 11 depicts theprototype during testing. The prototype was sufficient to demonstrate a simple walking functionality. Po-tentiometers were attached to the ends of the axles driving the legs to record positional data which wasfed into a feedback controller. The feedback controller took in position data from the potentiometers, anddetermined which direction the motor needed to spin to reach a specified end point. A potentiometer canbe seen within Figure 11 with red, white and black wires extending from the back. Green gears, located onthe inside of each leg at the knee and hip, which are visible in the figure, were used to decrease the speed ofthe rotation of the legs, as well as to increase the torque output from the motors. The code used to operatethe device is located within the Appendix, Section 10.1.1.
Two small-scale prototypes were developed for 3D printing to test the lower-limb exoskeleton concept.The center image illustrated within Figure 11 depicts the initial prototype design which includes mountinglocations for small DC motors, as well as for a microcontroller and battery. The purpose of the prototypewas to demonstrate the walking functionality for a device in which the hip and knee joints are actuatedutilizing DC motors controlled by a closed feedback loop PID controller as with the initial prototype.
The rightmost diagram illustrated within Figure 11 depicts the revised small-scale prototype design. Therevised prototype had mounts for the same DC motors that would actuate the device, as well as sets ofgears to decrease the rotation speed and increase the torque generated for driving the leg movement. The
15

Figure 11: Initial Small-Scale Exoskeleton Prototype with VEX components (Left), First Small-Scale Pro-totype Model (Middle), Revised Small-Scale Prototype Model (Right)
gearing was based upon known input voltage values and RPM ratings for each DC motor that came witheach product. The design accommodates placement of a microcontroller and battery on the back plate ofthe device, as with the previous design. Although the parts were printed out, the printing tolerance was notlow enough for certain pieces which resulted in components not fitting in correctly with one another.
3.5 Analysis
The analysis is performed primarily with the use of computational software. Modeling software, such asSOLIDWORKS R©, is used to design the components that make up the device. The weight and dimensionalproperties of components is then used to perform kinematic and dynamic analyses on the device as a whole.Utilizing the relations within sections 2.5.1 and 2.5.2, a program such as MATLAB R© can be used to determinepower, torque and velocity requirements for the actuators within the system. The process can be madesimpler by creating a script that will take in a particular set of data and outputting the desired information.The results of these analyses can then be used to select an appropriate method of actuation for the device, andsubsequently the actuators performing joint movement under load. Further analysis can be completed afterconstruction by comparing actual values to the predicted values, allowing for improvement of the analyticalcomponents.
16

4 Final Design & Validation
The final prototype was designed using SOLIDWORKS R©, and analyzed using MATLAB R© software, beforebeing construected using primarily aluminum, 80/20 R© components.
4.1 Final Design
Several modifications were made in progressing from the initial design, Figure 10, to the final design illus-trated with Figure 12. The preliminary design included 3 DOF at the hip, 1 at the knee, and 1 at theankle. This design was modified to include 1 DOF at the hip, and 1 at the knee, both flexion and extension.Rotation, abduction and adduction of the leg about the hip were deemed unnecessary for gait training withthis device. To decrease overall complexity of the device, these DOF were omitted.
Figure 12: Top Right Angled View of Aluminum 80/20 R© Exoskeleton Frame Model
The ability of the device to adjust for the varying sizes of individuals was preserved. The distance betweenthe hip and knee joints, as well as the distance between the knee and end of the device, can be increased byroughly 6 inches for each section. The base height of the device is 2.5 feet and can be increased to a totalheight of 3.5 feet, allowing the device to fit individuals within the range of 5 to 7 feet tall, depending ontheir body structure. Additionally, the distance between each of the devices hip joints can be increased toaccommodate varying hip structures.
The entire foot is enclosed within an ankle brace, and the ankle joint was removed from the previousdesign. The ankle brace provides support to prevent injury to the ankle, as well as allows the device to carrythe user through locomotion. Velcro straps secure the foot in place while the brace itself is attached viabolts along the frame rails. Because of the method of attaching the brace to the frame, its height can beadjusted for different users. Instead of creating a spring-assisted passive ankle joint, the brace prevents thefoot from pivoting and decreases complexity.
17

Figure 13: Full-Scale Exoskeleton Prototype Left Angled View with Knee Bent (Left), Left Angled Viewwith Knee straight (Middle), & Right Angled View with Knee Bent (Right)
Figure 13 Illustrates the constructed aluminum 80/20 R© prototype framework. Within the illustration,the foot brace is visibly affixed to the frame. The use of 80/20 R© framework components allows for theeasy adjustment of the device and attachment of future components such as different types of actuators. Inaddition to what can be seen in the illustration is an external backpack type frame that would allow the userto secure themselves to the device at the hip.
4.1.1 Validation
The frame developed is capable of the desired adjustment and articulated as defined for the project. Thesimple rotary joints for the hip and knees accomplish all necessary movements with an increased range ofmovement over what is required of the device to perform locomotion. In addition to basic functionality, thecomponents that make up the frame are easily modifiable and allow for additional hardware to be added ifnecessary, and for existing hardware to be replaced, removed, or improved. In performing the dynamic andkinematic analysis, the form of the device allowed for simple analysis and lumping of masses due to the lackof abstract shapes and mechanisms requiring complex design. Analysis was further simplified by reducing alldynamic analysis to two planes after the removal of adduction and abduction functionality of the leg aboutthe hip which was omitted after being deemed unnecessary for basic locomotion.
18

5 Design Verification
5.1 Modeling
The model used while performing calculations for the exoskeleton device is the same as illustrated withinFigure 12. In addition to what is displayed in the figure, the weight of a leg of a 200lb male was added tothe weight of the exoskeleton components, using de Leva’s Segment approximation [37], in order to lumpmasses and perform calculations. The goal of the dynamic analysis was to understand the power and torquerequirements for the device while operating under load, given the set point data contained within Table 1.
While developing and testing the code, located within the Appendix section 10.2, it was determined thatlumping masses significantly reduced the size and complexity of the code while giving similar results.
The model that was constructed does not include the mass or configuration data of any actuators thatmay be placed upon the device, however incorporating another such component would only require theadditional lumping of the components with that of the existing framework and leg.All dynamic analyseswere carried out using this design as a model.
5.2 Computation
In Table 1, the position data is related to a percentage of stride completion. Figure 4 shows the entire cycleof movements contained within one gait cycle, from heelstrike on one leg to the deceleration segment, andpercent of stride completion is relative to one of these cycles. Timing the procedure, it was determined thatone cycle takes approximately 1.5 seconds. For the analysis, in order to decrease maximum torque and powerrequirements as well as working under the assumption that a disabled individual will likely be operating ata slower pace until further recovery is made, the full cycle is assumed to take place within 3.3 seconds, 2.2times the measured length of a full normal cycle.
Angular position data was taken from Table 1 and used in conjunction with the set of percent of stridecompletion values, which were subsequently turned into time values using the aformentioned strategy, tosolve for angular velocity and acceleration for each joint at each time step defined within the set of valueswithin Table 1.
Utilizing the values for the angular velocity and acceleration of each joint throughout the predefined setof points; the relations described in Section 2.5.2, particularly Equations 8-17, were used to determine thetheoretical torque requirements for the device to operate under load. Additionally, using the power relationswithin Section 2.5.4, Equations 18-19 & 21, theoretical power requirements for an actuator actuating thejoints to their positions according to the predetermined time values were determined. These values weredetermined using computational MATLAB R© software, where the sets of relations were applied to expeditethe process of solving for values. The use of such software significantly reduced the amount of time requiredto come up with solutions to the kinematic and dynamics problems. The kinematics script is presentedwithin the Appendix in Section 10.2.1, while the dynamics script follows in Section 10.2.2.
5.3 Results of Analysis
Full sets of data obtained from the kinematic and dynamic analyses are available within the Appendix,section 10.3, Tables 5-7. Figures 14-17 graphically represent kinematic and dynamic data. In each graph,the blue line represents change in value with respect to time for the hip joint, while the red line representsa change in value with respect to time for the knee joint.
Figures 14 & 15 illustrate the angular position of each joint with respect to time, and the angular velocityof each joint with respect to time, respectively. Figures 16 & 17 represent the actuator torque requirementswith respect to time, and the actuator power requirements with respect to time, respectively.
A negative slope in the graphical sets of data represents extension of the upper or lower leg about thehip or knee, respectively, while a positive slope represents flexion. As previously stated in section 2.5.3, withrespect to Figure 2, positive rotation about a joint is in the counter-clockwise direction.
Comparing the data, the knee joint follows a more exaggerated movement profile when compared to thehip joint, and thus requires more force to be carried through the locomotive procedure. With the increasedtorque requirements, the power requirements also rise in a predictable manner. It is also important to
19

consider the angular velocity of the joint when analyzing the power requirements, as the product of torqueand angular velocity give the solution to the power relation.
Figure 14: Angular Position vs. Time Data for Exoskeleton Model
Figure 15: Angular Velocity vs. Time Data for Exoskeleton Model
The maximum theoretical amount of power required for the hip joint actuator within the given conditionsis 43.2506 Horsepower (Hp), while the knee joint actuator requires 337.3151 Hp. Closer inspection revealsthat the highest power requirement for the knee joint actuator occurs during the midswing portion of thegait cycle. This power requirement is significantly higher at this stage than it is for any other portion ofthe gait cycle for the knee except for immediately after, where is still only reaches roughly two thirds of theprevious value. Beyond this last portion, the next highest requirement is less than a third of the highestvalue and occurs just before the midswing portion. In comparison, the hip joint has power need spikes, butthey are not as exaggerated as those for the knee joint. During the time period when the power requirementfor the knee joint actuator is at its highest, the forward swinging motion of the lower leg is compounded bythe forward swinging motion of the upper leg.
5.4 Applications
The data provided by the kinematic and dynamic analyses can be used to select an appropriate actuator,to alter the desired joint behavior for the device, or to make modifications to the design. In this particular
20

Figure 16: Required Actuator Torque vs. Time Data for Exoskeleton Model Under Load
Figure 17: Required Actuator Power vs. Time Data for Exoskeleton Model Under Load
case, the maximum power and torque output requirements for the knee and hip actuators are very large,and difficult to work with. Using the same MATLAB R© scripts, but increasing the overall time of one gaitcycle completion from 3.3 seconds to 9.9 seconds reduces the max power requirements for the hip actuator to1.0855 Hp, and 3.5231 for the knee actuator. Although in this case the power requirements are much morefavorable, 9.9 seconds for one cycle of walking is too long.
By analyzing the data in such a way, it is possible to modify either the design or behavior in such a waythat appropriate actuators can be selected and utilized to perform target actions within desired parameters.This particular set of data can be interpreted to suggest that the implication of a system to compensate forrotational forces during specific portions of the movement profile would provide the best results. Doing socould significantly reduce the maximum power requirements, while allowing the device to maintain realisticspeed and function.
Utilizing a flexible program to complete these analyses makes solutions to the problem potentially moreaccessible. The script can be modified to accommodate completely different structures whether the massesare lumped together or not. The next step in the process would be to finalize a design and select actuatorsand compare the predicted results with actual results, and then modify the program to produce more accuratepredictions.
21

6 Alternative Designs
6.1 Needs Analysis
An exoskeleton device intended for rehabilitative gait training should have enough DOF to emulate accuratelocomotion. Whether the joints are actively or passively actuated, the device should be able to simulate andassist the user in locomotion. The device is intended for individuals who may have spinal cord or neurologicaldamage along with other physical impairments that result in the inability to produce a healthy gait duringlocomotion. Due to this constraint, the device must have enough actuated joints to emulate locomotionwhile supporting and carrying the user through the process.
It is important that the device is accessible to rehabilitative specialists and clinicians who perform gaitrehabilitation. A low price for the exoskeleton can be maintained by reducing the complexity of the devicewherever possible so long as core functionality is not lost. An exception to the rule is that the devicemust maintain adjustability along the lengths of the leg linkages, and along the back support to ensure thatindividuals of varying height and body type are able to use the device such that it is interchangeable betweena broad spectrum of patients. This requirement ensures that the purchase of numerous units per facility isnot a necessity, and that significant time is not spent fitting the device to any specific individual.
The minimum required number of DOF for a rehabilitative lower-limb exoskeleton for gait rehabilitationis 1 at the hip, and 1 at the knee. While it is not necessary for each joint to be actively actuated, rotationof the lower leg about the knee, and of the whole leg about the hip must be assisted in some way such thatthe load is partially or completely off the user, and the device is able to support itself so as to not put anyadditional strain upon the user during operation.
6.2 Functions
The device is intended for individuals who may have lost all walking capabilities and must be capable ofguiding and supporting its user through entire gait cycles without input from the user. As the user developsthe ability to walk, they may be able to input some force while the device provides less where applicable,however it cannot be assumed that they will be able to do so in any step of the process.
The device should be fully programmable or structured such that it is capable of performing locomotionwithout any physical input from the user. Guiding the user through locomotion is the primary applicationof the device, and must remain the functional focus.
The next important functionality of the device is its adjustability. The device should be adjustablebetween a broad range of users to eliminate the need to fit a device to a single individual, or requireextensive swapping of components to allow for usage between different individuals. Adjustability betweenusers contributes to the accessibility of the device by reducing the number of units any one facility mayrequire to extend its usefulness to as many patients as possible.
6.3 Feasibility
Within the original span of the project, it was difficult to perform all of the desired analyses with the limitedtime and resources that were available. Due to the power requirements required for actuation with thecurrent model, the price of components was more than would be awarded for the project without a specificsponsor. The details regarding the price of components are explored within section 7 - Cost Analysis.
Being more familiar with which components of research and analysis will lead to the most beneficialdata and ability to construct a device sufficient to meet the project specifications, a schedule could bedesigned to meet more project goals within the time period generally allotted to an MQP project. If the costrequirements are met, it would be feasible to design and construct the primary or an alternate exoskeletondesign according to the original scope of the project.
6.4 Design Specifications
The primary design involves the sole usage of motors to actuate the device. This is not necessarily the mostefficient method. Other possible methods include coupling the motors with a spring-latch type mechanismthat would provide additional force to the leg link component at certain intervals in the gait cycle, such as
22

those explored in Section 5.3 - Results of Analysis. Utilization of a mechanism to assist in delivering force atpeak torque and power requirement locations would reduce the maximum power and torque requirements,allowing for the use of a significantly less powerful and less expensive motor. A modification to this designwould involve implementing a passive assistance mechanism, such as a spring-latch system that could deliverextra force at key intervals in the gait cycle to reduce maximum power and torque requirements.
A system composed of joints actuated by a pneumatic system is another option deserving of exploration.Speed of actuation can be increased via airflow rate increase to the actuators, however that would require theimplementation of a compressor motor that is capable of delivering a high flow rate, and faces some of thesame issues that motors face in cost and power rating. With these types of systems, multiple configurationsare presented and should be explored. One configuration involves one actuator at each joint providing forceat a point on the leg to generate the appropriate amount of torque at the joint. The actuator would have tobe powerful enough to deliver the necessary amount of force, while allowing a high airflow rate to maintain anappropriate rotational velocity of the leg segments about their joints, and it must have a long enough strokelength to deliver force as far from the joint as possible for maximum leverage. The point of contact betweenthe actuator and leg segment would need to be on the back of the leg segments in order to accomplish therequired degree of motion. Another possible configuration would be to use multiple actuators per joint. Thissetup has the benefit of multiple, smaller actuators that would each generate less force, but have less internalvolume, allowing for quicker actuation using the same system of fluid delivery.
The final alternative method relies on artificial muscles, generally custom devices that would requireadditional research and modeling. Artificial muscles contain an air bladder that expands as the volumeinside them increases, which causes them to contract along their lengths. They behave much like actualmuscles, and can be configured in groups much like pneumatic or hydraulic actuators to provide more forcewithout changing the size of the actuator. Unlike hydraulic or pneumatic actuators, air muscles do not exhibitlinear displacement behavior, and the amount of force they deliver depends on the maximum internal volumeof the air bladder. An increase in airflow will also increase the speed of actuation of air bladders, howeveractuation velocity can be improved further by using multiple smaller air muscles in tandem hooked up to asystem that can deliver uniform airflow to each individual muscle at the same time. This must be balancedout with the amount of force that each actuator can deliver. This particular method may be the most flexibleas the muscles can be affixed to the exoskeleton frame in numerous configurations, but requires more studyinto modeling the system so that its behavior can be more thoroughly understood.
6.5 Decision
The actuation method should be chosen depending on desired maximum power, torque and rotational ve-locity values. Assuming the frame design remains constant, how closely an actuation method matches theaforementioned requirements will influence whether or not they are the most practical solution. It may benecessary to make adjustments to the initial conditions such as increasing the amount of time taken for a stepcycle to reduce the maximum rotational velocity, torque, and force requirements to maintain cost efficiency.The best solution will be a compromise between best fit of maximum values and total device cost.
At this point in time, it appears that use of air muscles would be the best alternative design. Thedrawback to this actuation method is the additional amount of time required to understand the force anddisplacement relationships for the actuator to design the most effective configuration.
The process of optimization will consist of compromising cost and effectiveness, and a thorough dynamicanalysis of the device and actuators used. If time permits, revisions to the system can be made to increaseefficiency based on an understanding of practical versus theoretical analysis values of the system developedafter the prototype has been constructed and tested and its behavior measured.
23

7 Cost Analysis
Within this section, the cost of components are explored. The actual price of components used to con-struct the exoskeleton framework, as depicted within Table 3 are presented, and explores the estimatedcosts associated with the purchase of components for designs utilizing different actuation methods exploredwithin Section 6 - Alternative Designs based upon the power, torque and rotational velocity requirements asdetermined from the dynamic analysis and discussed within Section 5.3 - Results of Analysis.
7.1 Exoskeleton Framework
The cost of components purchased from 80/20.net for the framework of the exoskeleton device are listedwithin Table 3.
Table 3: Cost of components purchased from 80/20 R© Inc.
Product # Product Length Quantity Price (total)#40-4080 Slotted Frame 8” 1 $11.01#40-4040 Slotted Frame 24” 2 $20.49#40-4040 Slotted Frame 18” 1 $14.88#13025 T-Nut NA 24 $38.40#14018 Pivot Joint NA 2 $37.80#40-4040 Slotted Frame 6” 1 $11.46#40-4040 Slotted Frame 4.14” 2 $10.91#40-4040 Slotted Frame 7” 2 $16.34#40-4367 4-Hole Plate NA 4 $19.80#40-4040 Slotted Frame 11.14” 2 $33.09
7.2 Alternative Design Projected Cost Analysis
This section explores the potential costs of components within alternative designs as defined in Section 6 -Alternative Designs.
7.2.1 Motors & Servos
As discussed in section 5.3 - Results of Analysis, the power requirements for a motor to actuate the legabout the hip and knee are unrealistically high if based upon the maximum values when the stride cycletime is only 3.3 seconds long. A more realistic approach would include the use of a mechanism to reduce themaximum power needs as explored within section section 5.4 - Applications.
A motor with a more realistic 2 Hp power rating would cost about $1,500, such as the model 45H828from GRAINGER R©. This DC motor has an RPM rating of 1750 at 180 Volts DC. While this motor couldlikely be used to satisfy the requirements for the device, further research would be required to determinethe effectiveness of the motor, at least 2 motors of this strength would be necessary. In addition, the framewould likely have to be altered to provide more support to the motor as each unit weighs roughly 80 lbs.
The knee requires a much less powerful actuator, and a motor with a 1 Hp power rating could be utilized.A motor of this power, such as the model 6ML07 from GRAINGER R©, costing $850 per unit. Each motorwould also weigh roughly 36 lbs, and has an RPM rating of 1800 at 24 Volts DC. Because of the weight ofthese actuators, they would also require support and would need to be located somewhere other than theleg.
Assuming a mechanism were designed to provide additional force and assist in locomotion, significantlyless expensive actuators could be purchased. If the necessary modifications were made, and utilization ofa 1/35 Hp motor for the knee and a 1/6 Hp motor at the hip were practical, the cost of actuators per legwould be reduced to roughly $385. The 1/35 Hp motor, model 3LCH7, could turn at a rate of 2350 RPMat 12 Volts DC, and weigh only 2.7 lbs. The 1/6 Hp motor, model 4Z529, could turn at a rate of 1800 RPMat 12 Volts DC and would weigh about 10 lbs.
24

7.2.2 Pneumatics
A pneumatic system would require the use of an air compressor to supply air to the system. A portablecompressor would be the most beneficial so that the device can be relocated if necessary. A portable electricair compressor with a 6 gallon tank and a max pressure of 125 pounds per square inch (psi), model 1NNE7,would cost roughly $500. The compressor and tank would have a combined weight of roughly 70lbs, howeverit would not need to be affixed to the device as pneumatic air lines would deliver air to the actuators.
The device would require a minimum of 2 pneumatic actuators for each leg. Stroke length is dependenton the configuration designed for the exoskeleton device. An air cylinder with 1-1/2 inch bore diameter witha 12 inch stroke, such as model 5VKZ2 in the GRAINGER R© catalog, has a weight of roughly 3.65 lbs, andcosts $214.25 per unit. The range of motion at the hip is less than that of the knee, so a pneumatic actuatorwith a smaller stroke length would suffice. Model 5VKY0 also has a 1-1/2 inch bore diameter, but only hasa 6 inch stroke length. This model has a weight of 2.55 lbs and costs $185.50 per unit.
The units described above have a maximum pressure rating of 250 psi, twice as much as can be suppliedby the portable air compressor explored previously. It may be necessary to supply a pressure closer to 250psi, and an alternate portable unit such as model 40CF16 could be utilized. This electric compressor andair storage tank is portable and has a power rating of 1.7 Hp. It has a maximum pressure rating of 225 psiand a 15 gallon tank. The price of this unit is $584.50.
Depending on the number of actuators and implementation of the system, electronic valves and fittingsare also required to control airflow to an actuator to deliver force at a particular speed. Solenoid air controlvalves allow the opening and closing of valves electronically, but have a max pressure rating. Depending onthe pressure rating and number of access points for pneumatic air lines, the components can cost severalhundred dollars each. A more cost efficient option may be to use a normal flow control valve and actuate itwith small servos, utilizing a closed feedback loop.
7.2.3 Air Muscles
Air muscles use silicon or latex tubing as a bladder surrounded by a mesh netting to restrict maximumexpansion and facilitate contraction and extension about its length. They will support an internal pressureof roughly 60 psi. Air muscles require a compressor and air storage tank like pneumatic systems, but thegenerator only needs to supply a maximum air pressure of roughly 60 psi. Air compressor and tank model25F538 has a 2 gallon tank and max pressure rating of 100 psi. The 2 gallon tank might prove insufficient,however the power rating more than suffices, and its cost is $145.05.
Silicon tubing can be purchased through GRAINGER R© at a rate of $70.45 per 50 feet with 5/16 inchoutside and 1/4 inch inside diameters, model 2LRJ1. The bladder is housed within a braided mesh sleeve toallow, but restrict maximum expansion and contraction. 50 feet of braided mesh sleeving with a diameter of0.375 inches can be purchased for $27.95, model 1UXZ6. Barbed hose connectors are attached at each end toallow airflow control, 2 are needed for each muscle. The appropriate sized fitting for this configuration wouldcost $17.60 per unit, model 20YY92. As with pneumatic systems, multiple units can be used in tandem,and a method of controlling airflow would be necessary. Valves that allow the control of airflow via a closedfeedback loop would need to be designed or purchased if available unless solenoid valves are used.
25

8 Discussion
Most of the time was spent prototyping, designing the exoskeleton frame, and performing a kinematic anddynamic analysis on the exoskeleton frame in order to determine what actuators would be necessary to havethe device operate under desired conditions. The data collected from these ventures were valuable, even ifall of the intended goals were not met because they did not fit within the budget or projected schedule.
Table 1 lists a set of hip and knee positions along with the percentage of a stride in which those angularpositions occur. This set of data was used by determining a goal time for one stride within a gait cycleto take, and the dynamics calculations were performed along those guidelines. The design for the devicewas constructed in solidworks, and resulted in what is presented within Figure 10, and as a constructedunit in Figure11, and was largely successful in fulfilling its adjustability and joint range of motion and DOFrequirements. It was designed in such a way to allow for the implementation of motors and a gearing systemto increase torque and decrease angular velocity output, however during the building process, incorrectmotors were ordered and purchased and caused setbacks within the schedule.
More research should be conducted in the future regarding the actual practicality of different types ofactuators when compared in real world situations to each other on the same base exoskeleton frame, andeven in isolation. This data would be crucial in deciding the best fit for the device, and is useful on a moregeneral basis depending on what design requirements are put into place for the exoskeleton device by thecreator.
If the project were to be performed again, the schedule would be altered such that first a simple, generalframe could be constructed to meet the kinematic requirements. The next step would be modeling a motor orservo, hydraulic and pneumatic system, and an air muscle system as well as collecting physical data regardingthe actuation velocity and output force components. The same dynamic analysis on the exoskeleton frameconsidering the weight and height of a user, as it is currently set up, would be conducted to gather dynamicdata representing the required joint angular velocity and force input values. An actuator would be selectedbased on the data gathered in the previous steps, and then implemented onto the device. A following dynamicanalysis considering the added components such as actuators would be performed, and then compared toactual results gathered from testing the prototype device. After the tests are complete, the prediction datacould be compared to the actual data to determine its accuracy and identify errors within the process.Completion of these steps would likely result in a broader understanding of both exoskeleton devices aswell as the capabilities and limitations of certain actuators within a system, potentially leading to furtherimprovements in the field if the data were presented to the community as a whole.
26

9 Conclusions & Recommendations
Over the course of the project, useful dynamic data pertaining to the use and design of lower-limb rehabilita-tive gait training exoskeleton was obtained, and a prototype frame upon which a working exoskeleton couldbe developed was constructed. As there was no sponsor for the development of this device, the requirementswere broad and the funding limited, however the prototype device frame that was constructed met the de-sign specifications as defined in the project definition of this report. The results of the project were usefuleven though a the device was not fully operational at its completion, making comparison of theoretical andactual exoskeleton performance data impossible within the set timeline. The dynamics data collected shouldbe used to continue research on the subject of rehabilitative exoskeletons, and it is suggested that work asproposed below be completed moving forward.
9.1 Future Work
Due to time and financial constraints, completion of research into every facet of the design for, and completeconstruction of a lower-limb exoskeleton device for clinical gait rehabilitation training was not possible.Future projects regarding this device could fall under several useful categories including, but not limitedto, improvement or remodeling of the base exoskeleton frame, addition of more degrees of freedom withinthe device or implementation of different types of joints, and research regarding the effectiveness of differentactuators and study of their effectiveness with real world usage.
9.1.1 Frame
The exoskeleton frame was built with availability for modification and adjustment as a main focus. Withadditional funding, it may be prudent to design a device made from custom components to reduce weight orsimplify adjustment and actuation mechanisms. While it may not be efficient to create a completely custommanufactured prototype device, if it were to be produced and utilized with its intended setting, a devicewith custom machined parts may result in a lighter and overall more effective device. Research into thisendeavor would reveal the practicality of this option as well.
Aside from improving the design, reworking the design to be a best fit for a certain method of actuationmay be a worthwhile venture. Constructing a softer device, one without rigid metal frames that attachesmore closely to the user, may facilitate pneumatic, hydraulic, and air muscle assemblies much better. Such adesign could be analyzed using the same computational software and scripts as provided within this documentwith little modification.
9.1.2 Joints & Degrees of Freedom
The joints contained within the constructed device are simple rotary joints, and the exoskeleton is left with2 DOF at each leg. This degree of articulation suffices for a simple mechanism, but could be improved iftime and funds allowed. It would be important to conduct research as to whether an increase in articulationjustifies a likely increase in cost in addition to researching joint improvements and an increase in DOF perleg.
9.1.3 Actuation
In order to complete the device, it is necessary to assign actuators to each of the two powered joints perleg. These actuators may be active, passive, or a combination of both. The analyses performed within thisproject estimate the power, torque, and angular velocity requirements which are to be used in selecting anappropriate actuator. These data are intended to be used to select the most appropriate actuator to emulatea healthy human walking gait.
The device was originally intended to utilize motors for its method of actuation. Upon conducting researchand analyses of the required input forces, it became evident that motors alone may not be appropriatefor actuation for the device under the given velocity and component weight conditions. The results ofthe dynamic analysis, further explored within section 5.3 - Results of Analysis, and 5.4 - Applications,
27

suggest that a combination of passive and active actuator systems may be the most effective approach. Theexoskeleton device would benefit greatly from further research into this method of actuation.
Analysis into the response times and force outputs from hydraulic and pneumatic actuators would alsobe useful in developing the device. These results can be compared to the same qualities from motors andservos or spring-assisted passive systems.
Air muscles do not provide a linear force output, contraction rate or range, and would benefit greatlyfrom physical and theoretical analysis. Future work could involve the analysis of air muscle systems withregard to their force outputs, response times and degrees of contraction with varying factors such as airbladder component size, airflow into the actuator, or pressure within the system with respect to contractionand force output.
Generating mathematical models for each actuator type to make comparisons simpler would expedite thedesign process. Furthermore, outputs from the various models could be easily compared to desired results,providing information useful in making a quick, informed decision on the best type of actuation method fora device.
9.1.4 Bond Graph Analysis
A Bond Graph analysis can be used to more closely understand how an individual component influences thesystem dynamically, or how the system as a whole behaves based on the individual components. Furtheranalysis using the Bond Graph method could provide useful insight as to which parts of the device moreheavily influence the overall behavior of the device. One advantage of Bond Graphs over a standard dynamicanalysis is the consideration of elastic and damping coefficients of different types of components such as link-ages between joints and the joints themselves. Bond Graphs also more closely analyze the direct connectionbetween systems such as from electric to mechanical forces, electric to pneumatic, etc.
A Bond Graph was being developed for an earlier diagram of the exoskeleton device depicted in Figure10, but was not completed within the time frame of the project. Development and understanding of theexoskeleton and its behavior under load and actuation would be improved if the dynamic analysis and resultsof physical testing could also be compared to the results of a preliminary Bond Graph analysis.
Figure 18 shows a bond graph that demonstrates how the forces and behaviors of one link and jointeffect each of the following components in the standard causal Bond Graph technique. Figure 19 utilizesthe multibond method which represents connections between components in a more graphically concise way.Each junction is represented by either a ”1” or a ”0.” ”1” Junctions represent major components such aselectrical motors and joints. Electrical motors have sources of effort in the form of a supply voltage, resistanceand impedance that affect the mechanical components they exert a force upon. Electrical motors providean effort input to both of the powered joints 1 and 2, the hip and knee respectively, and their output istransformed via a gyrator (GY) unit. In bond Graphs, a gyrator is a mathematical operation allowing theconversion from an electrical output to a rotational input. Each joint has a rotational inertia component,torque, damping forces and sometimes spring forces. These forces directly effect the next joint, as well asthe links that they are attached to. The links have forces on the x, y and z plane, and these forces playan effect on the following linkages as well, as is displayed in the Bond Graph. ”0” Junctions are used asconnectors between components and often represent linkages, or components without their own inertia value.Transformers (TF) are used to convert units such as those between rotational and linear forces. Transformerscan be seen converting values from the rotational joints to the linear linkages between joints. They can alsobe used to denote rotation about a point, as is the case with each of the leg linkages.
The multibond method is a practice that allows the truncation of a bond graph by combining severalbonds into one bond when they represent forces from a single component. In Figure 19, multibonds are usedto combine the transformations made by and to the leg linkages, and the resulting calculations are performedwith a matrix operation, as opposed to compounding single values.
Although the practice can appear complicated, references such as ”Bond graph methodology: develop-ment and analysis of multidisciplinary dynamic system models [33]” provide an in-depth guide to constructingBond Graphs and utilizing them to gain understanding of the dynamic properties of a system.
Modification of the Bond Graphs illustrated within Figures 18 & 19 to more accurately describe thecurrent exoskeleton design, and to incorporate the type of actuation method chosen upon completion of thedevice would provide much needed insight into the behaviors of the device, as well as the key differences
28

between a standard dynamic analysis and a Bond Graph Analysis. This can be used to compare the twomethods to measured data and determine which method is most effective, or which method gives more insightinto the effectiveness of certain components or activities, allowing for a more thorough understanding of thedynamic qualities of exoskeleton systems undergoing design and analysis.
Figure 18: Causal Bond Graph of an Exoskeleton System
29

Figure 19: Causal Multi Bond Graph of an Exoskeleton System
References
[1] CDC, “Stroke Facts,” March 2015, http://www.cdc.gov/stroke/facts.htm.
[2] H. Sakakima, K. Ijiri, F. Matsuda, H. Tominaga, T. Biwa, K. Yone, and Y. Sankai, “A newly developedrobot suit hybrid assistive limb facilitated walking rehabilitation after spinal surgery for thoracic ossi-fication of the posterior longitudinal ligament: a case report,” Case reports in orthopedics, vol. 2013,2013.
[3] A. Nilsson, K. S. Vreede, V. Haglund, H. Kawamoto, Y. Sankai, and J. Borg, “Gait training early afterstroke with a new exoskeleton – the hybrid assistive limb: a study of safety and feasibility,” Journal ofNeuroengineering and Rehabilitation, vol. 11, no. 92, June 2014.
[4] I. Dıaz, J. J. Gil, and E. Sanchez, “Lower-limb robotic rehabilitation: literature review and challenges,”Journal of Robotics, vol. 2011, 2011.
[5] A. Esquenazi, M. Talaty, A. Packel, and M. Saulino, “The rewalk powered exoskeleton to restoreambulatory function to individuals with thoracic-level motor-complete spinal cord injury,” Americanjournal of physical medicine & rehabilitation, vol. 91, no. 11, pp. 911–921, 2012.
30

[6] M. Bortole, A. Venkatakrishnan, F. Zhu, J. Moreno, G. Francisco, J. Pons, and J. Contreras-Vidal,“The H2 robotic exoskeleton for gait rehabilitation after stroke: early findings from a clinical study,”Journal of Neuroengineering and Rehabilitation, vol. 12, no. 54, June 2015.
[7] F. Sergi, D. Accoto, N. L. Tagliamonte, G. Carpino, and E. Guglielmelli, “A systematic graph-basedmethod for the kinematic synthesis of non-anthropomorphic wearable robots for the lower limbs,” Fron-tiers of Mechanical Engineering, vol. 6, no. 1, pp. 61–70, 2011.
[8] H. K. Kwa, J. H. Noorden, M. Missel, T. Craig, J. E. Pratt, and P. D. Neuhaus, “Development of theihmc mobility assist exoskeleton,” in Robotics and Automation, 2009. ICRA’09. IEEE InternationalConference on. IEEE, 2009, pp. 2556–2562.
[9] “Graphical representation of phases in a healthy gait cycle,”http://www.chiro.org/ACAPress/BodyAlignmentFigure19.jpg, accessed: 2016-04-25.
[10] “Graphical representation of hip and knee angles over percent of phases in a healthy gait cycle,”http://www.sfu.ca/ leyland/Kin201%20Files/4%20Gait%20Analysis%20%20Angular%20Kinematics.pptx.pdf,accessed: 2016-04-25.
[11] “Pid feedback loop block diagram,” http://i2.wp.com/coder-tronics.com/wp-content/uploads/2014/05/PID-Block-dia1.png, accessed: 2016-04-22.
[12] J. G. Ziegler and N. B. Nichols, “Optimum settings for automatic controllers,” trans. ASME, vol. 64,no. 11, 1942.
[13] L. Maimoun, C. Fattal, J.-P. Micallef, E. Preuchon, and P. Rabischong, “Bone loss in spinal cord-injuredpatients: From physiopathology to therapy,” Spinal Cord, p. 203–210, September 2005.
[14] H. Appell, “Muscular atrophy following immobilisation,” Sports Medicine, vol. 10, Issue 1, pp. 42–58,July 1990.
[15] A. Behrman and S. Harkema, “Locomotor training after human spinal cord injury: A series of casestudies,” Physical Therapy, vol. 80 no. 7, pp. 688–700, July 2000.
[16] G. Colombo, M. Wirz, and V. Dietz, “Driven gait orthosis for improvement of locomotor training inparaplegic patients,” Spinal Cord, vol. 39, pp. 252–255, 2001.
[17] D. Ferris, G. Sawicki, and A. Domingo, “Powered lower limb orthoses for gait rehabilitation,” Topics inSpinal Cord Injury Rehabilitation, pp. 34–49, 2005.
[18] W. Ichinose, D. Reinkensmeyer, D. Aoyagi, J. Lin, K. Ngai, V. Reggie Edgerton, S. Harkema, and J. Bo-brow, “A robotic device for measuring and controlling pelvic motion during locomotor rehabilitation,”Proceedings of the 25th Annual International Conference of the IEEE EMBS.
[19] A. Esquenazi, M. Talaty, A. Packel, and M. Saulino, “The rewalk powered exoskeleton to restoreambulatory function to individuals with thoracic-level motor-complete spinal cord injury,” AmericanJournal of Physical Medicine Rehabilitation.
[20] Y. Sankai, “Leading edge of cybernics: Robot suit hal,” SICE-ICASE International Joint Conference.
[21] J. F. Veneman, R. Kruidhof, E. E. Hekman, R. Ekkelenkamp, E. H. Van Asseldonk, and H. VanDer Kooij, “Design and evaluation of the lopes exoskeleton robot for interactive gait rehabilitation,”Neural Systems and Rehabilitation Engineering, IEEE Transactions on, vol. 15, no. 3, pp. 379–386,2007.
[22] J. Pons, “Wearable robots: Biomechatronic exoskeletons,” in Oxford Handbook of Innovation, J. Pons,Ed. Madrid, Spain: Jones Bartlett Publishers, 2008.
[23] M. Cenciarini and A. Dollar, “Biomechanical considerations in the design of lower limb exoskeletons,”IEEE International Conference on Rehabilitation Robotics.
31

[24] A. Dollar and H. Herr, “Lower extremity exoskeletons and active orthoses: Challenges and state-of-the-art,” IEEE Transactions on Robotics, vol. 24, pp. 144–158, 2008.
[25] “Hal for medical use (lower limb type),” http://www.cyberdyne.jp/english/products/LowerLimbmedical.html,accessed: 2015-07-15.
[26] “Hal for living support (lower limb type),” http://www.cyberdyne.jp/english/products/LowerLimbnonmedical.html,accessed: 2015-07-15.
[27] S. K. Banala, S. K. Agrawal, and J. P. Scholz, “Active leg exoskeleton (alex) for gait rehabilitationof motor-impaired patients,” in Rehabilitation Robotics, 2007. ICORR 2007. IEEE 10th InternationalConference on. IEEE, 2007, pp. 401–407.
[28] A. Zoss, H. Kazerooni, and A. Chu, “On the mechanical design of the berkeley lower extremity exoskele-ton (bleex),” RJS International Conference on Intelligent Robots and Systems.
[29] M. G. Hoy, F. E. Zajac, and M. E. Gordon, “A musculoskeletal model of the human lower extremity:the effect of muscle, tendon, and moment arm on the moment-angle relationship of musculotendonactuators at the hip, knee, and ankle,” Journal of biomechanics, vol. 23, no. 2, pp. 157–169, 1990.
[30] T. L. Wickiewicz, R. R. Roy, P. L. Powell, and V. R. Edgerton, “Muscle architecture of the humanlower limb,” Clinical orthopaedics and related research, vol. 179, pp. 275–283, 1983.
[31] R. Ranjan, P. Upadhyay, A. Kumar, and P. Dhyani, “Theoretical and experimental modeling of airmuscle.”
[32] H. K. Kwa, J. H. Noorden, M. Missel, T. Craig, J. E. Pratt, and P. D. Neuhaus, “Development ofthe ihmc mobility assist exoskeleton,” in IEEE International Conference on Robotics and Automation,2009. ICRA’09. IEEE, 2009, pp. 2556–2562.
[33] W. Borutzky, Bond graph methodology: development and analysis of multidisciplinary dynamic systemmodels. Springer Science & Business Media, 2009.
[34] T. Wescott, “Pid without a phd,” Embedded Systems Programming, vol. 13, no. 11, pp. 1–7, 2000.
[35] E. Criswell, “Cram’s introduction to surface electromyography second edition,” in Oxford Handbook ofInnovation, M. Gartside and J. Waugaman, Eds. Canada: Jones Bartlett Publishers, 2010.
[36] I. Dıaz, J. J. Gil, and E. Sanchez, “Lower-limb robotic rehabilitation: literature review and challenges,”Journal of Robotics, vol. 2011, 2011.
[37] “Body segment data,” http://www.exrx.net/Kinesiology/Segments.html, accessed: 2016-05-15.
32

10 Appendix
10.1 Arduino Programs
10.1.1 Simple Prototype Closed-loop Feedback Controller
/*
* Simple P-only -ARDUINO- PID-type program for moving a joint
* For use with simple mini-prototypes
* Brian Flynn Nov 12, 2015
*
*/
#include <Servo.h> // servo library
//Define Variables we’ll be connecting to
double Input, Output;
// potentiometer attached to analog read pin A0
const int pot = A0;
// Timer variables
int count = 0;
int flag = 0;
// initialize motor
Servo righthip; // Servo object
// only need righthip for this simple program, but other motors have been initialized if wanted
// technically, timer is not used in this program
void setup() {
Serial.begin(9600);
initTimer0();
righthip.attach(2, 1000, 2000);
Input = analogRead(pot);
}
/* using a new potentiometer for better results
* resting (straight down) is 145 deg. -> (0 == 145) The values changed during another attempt,
which is
* why these are no longer applicable/used
* 25 (back) -> 250 (forward) deg.
* motors.write info:
* >90 forward, <90 backward
* cannot move with only 10 speed in either direction
*/
// simple program to alternate end positions to test movement responses in simple prototype
void loop() {
stopMotors(); // stop motors so they do not move until commanded to
int target;
int diff;
while (1) {
target = 400;
Input = analogRead(pot);
diff = abs(target - Input);
if (diff < 10) {
33

stopMotors();
break;
}
doPID(target);
}
while (1) {
target = 625;
Input = analogRead(pot);
diff = abs(target - Input);
if (diff < 10) {
stopMotors();
break;
}
doPID(target, target);
}
while (1) {
target = 500;
Input = analogRead(pot);
diff = abs(target - Input);
if (diff < 10) {
stopMotors();
break;
}
doPID(target);
}
}
/*
* Really only P, take in target and current location
* use current location for create a proportional control loop
* speed of approaching target is a ratio of distance from current location
* to target location
*/
void doPID(int target, minval) {
Input = analogRead(pot);
double diff = abs(target-Input); //distance away from setpoint
double maxdiff = abs(target-minval)
int output;
// change sign depending on direction to work with movehip() function
if (target < Input) {
output = -30*(diff/maxdiff);
}
else {
output = 30*(diff/maxdiff);
}
movehip(output);
if (flag == 1) { // print out angle and speed data to serial port
Serial.print("Target :");
Serial.print(target);
Serial.print(’\n’);
Serial.print("Actual :");
Serial.print(Input);
Serial.print(’\n’);
Serial.print("Speed :");
Serial.print(output);
Serial.print(’\n’);
Serial.print(’\n’);
34

Serial.print(’\n’);
flag = 0; // reset flag
}
}
// stops the motor(s) from moving (90 is stationary)
void stopMotors() {
righthip.write(90);
}
// rotates joint with variable for speed as input
// (normally use value between 0 and 180, this translates the base .write program for between 0
and 90)
void movehip(int hipSpeed) {
righthip.write(90 - hipSpeed); // 90 is stationary, <90 forward, >90 reverse
}
// Timer 0 setup registers
void initTimer0() {
// Timer0
TCCR0A = 0;
// set entire TCCR2A register to 0
TCCR0B = 0;
// same for TCCR2B
TCNT0 = 0;
//initialize counter value to 0
// set compare match register for 2khz increments
OCR0A = 124;
// = (16*10^6) / (2000*64) - 1 (must be <256)
// turn on CTC mode
TCCR0A |= (1 << WGM01);
// Set CS01 and CS00 bits for 64 prescaler
TCCR0B |= (1 << CS01) | (1 << CS00);
// enable timer compare interrupt
TIMSK0 |= (1 << OCIE0A);
sei(); //allow interrupts
}
// timer interrupt
ISR(TIMER0_COMPA_vect) {
count++;
if (count > 3000) {
flag ++;
count = 0;
}
}
10.2 MATLAB Scripts
10.2.1 Solve Forward and Inverse Kinematics
Input angular position and time to output velocity and acceleration data, then solve inverse kinematicsproblem to proof work.
35

%% Exoskeleton Kinematics Solving Script
% Brian Flynn
% 3/2/2016
%
% -Use joint angle and time data from input excel file containing data
% -Solve for forward position, velocity and acceleration kinematics,
% and inverse kinematics given these parameters
% -Create an excel document containing all variables for analysis
%% Define Known Values
% The base length of both the upper and lower leg is 13.5 inches
L1b = 13.5;
L2b = 13.5;
% The extensions for each of the leg components goes from 0 to 6 inches (L1e==L2e always)
L1e = 0;
L2e = 0;
% The combination of the base length plus the extension (if applicable)
L1 = L1b+L1e;
L2 = L2b+L2e;
%% Define Columns in Output Matrix/Excel Document
Sol = {};
Sol{1,1} = ’Theta1-(FK)’;
Sol{1,2} = ’Theta2-(FK)’;
Sol{1,3} = ’omega1-(FK)’;
Sol{1,4} = ’omega2-(FK)’;
Sol{1,5} = ’accel1-(FK)’;
Sol{1,6} = ’accel2-(FK)’;
Sol{1,7} = ’Px-(FK)’;
Sol{1,8} = ’Py-(FK)’;
Sol{1,9} = ’Vx-(FK)’;
Sol{1,10} = ’Vy-(FK)’;
Sol{1,11} = ’Ax-(FK)’;
Sol{1,12} = ’Ay-(FK)’;
Sol{1,13} = ’Theta1-(IK)’;
Sol{1,14} = ’Theta2-(IK)’;
%% Create Matrix for Input Data
filename = ’HipAndKneeData.xlsx’;
InputVals = xlsread(filename);
%% Solve Kinematics within a Loop for All Input Values
% Initialize vAariables for iteration and input table size
n = 22; % number of rows in input table
i = 1; % starting row
LastT = 0;
LastTh1 = 270 - InputVals(1,3);
LastTh2 = InputVals(1,4);
Lastw1 = 0;
Lastw2 = 0;
while i < n
% Collect theta and time values from input table
36

T = InputVals(i,2);
Th1 = 270 - InputVals(i,3);
Th2 = InputVals(i,4);
% Solve for additional variables
% (if statements to print out 0 correctly in spreadsheet)
if (Th1 == LastTh1)
w1 = 0;
else
w1 = (Th1 - LastTh1)/(T - LastT);
end
if (Th2 == LastTh2)
w2 = 0;
else
w2 = (Th2 - LastTh2)/(T - LastT);
end
if (w1 == Lastw1)
a1 = 0;
else
a1 = (w1 - Lastw1)/(T - LastT);
end
if (w2 == Lastw2)
a2 = 0;
else
a2 = (w2 - Lastw2)/(T - LastT);
end
% Store values in table
Sol{i+1,1} = Th1;
Sol{i+1,2} = Th2;
Sol{i+1,3} = w1;
Sol{i+1,4} = w2;
Sol{i+1,5} = a1;
Sol{i+1,6} = a2;
%% Solve Position, Velocity and Acceleration Forward Kinematics
% Position
Px = L1*cosd(Th1)+L2*cosd(Th1+Th2);
Py = L1*sind(Th1)+L2*sind(Th1+Th2);
% Velocity
Vx = -(w1*L1*sind(Th1))-(w1*L2*sind(Th1+Th2))-(w2*L2*sind(Th1+Th2));
Vy = (w1*L1*cosd(Th1))+(w1*L2*cosd(Th1+Th2))+(w2*L2*cosd(Th1+Th2));
% Acceleration
Ax =
-((a1*L1*sind(Th1))+((w1^2)*L1*cosd(Th1)))-((a1*L2*sind(Th1+Th2))+(w1*((w1+w2)*(L2*cosd(Th1+Th2))))-((a2*L2*sind(Th1+Th2))+(w2*((w1+w2)*(L2*cosd(Th1+Th2))))));
Ay =
((a1*L1*cosd(Th1))-((w1^2)*L1*sind(Th1)))+((a1*L2*cosd(Th1+Th2))-(w1*((w1+w2)*(L2*sind(Th1+Th2))))+((a2*L2*sind(Th1+Th2))-(w2*((w1+w2)*(L2*sind(Th1+Th2))))));
% Put position, velocity and acceleration data into table
Sol{i+1,7} = Px;
Sol{i+1,8} = Py;
Sol{i+1,9} = Vx;
Sol{i+1,10} = Vy;
Sol{i+1,11} = Ax;
Sol{i+1,12} = Ay;
%% Solve Inverse Kinematics Using Calculated ’P’ Values
% Solve for the configuration when the knee is bent backwards (down)
37

% Solve for the distance between the origin and point ’P’ (the end
% effector)
Lp = sqrt((Px^2)+(Py^2));
% Solve for the angle between the origin and point ’P’
ThP = (atan2(Py,Px))*(180/pi);
% Use cosine law to solve for Th1 <- (ThA to not mix up variables)
% (L2^2)=(L1^2)+(Lp^2)-2*L1*Lp*cos(ThA)
% Solve for ThA and compute
ThA = (acos(((L2^2)-(L1^2)-(Lp^2))/(-2*L1*Lp)))*(180/pi);
% Use sine law to compute ThB
% (Lp/sin(ThB))=(L2/sin(ThA))
% Solve for ThB and compute
ThB = (asin((Lp*sind(ThA))/(L2)))*(180/pi);
% Solve for Th1 (Th1InvK) and Th2 (Th2InvK) //// (InvK == Inverse Kinematics)
Th1InvK = ThP - ThA;
Th2InvK = ThB;
% Put solved Theta1 and Theta2 values into table
Sol{i+1,13} = 360 + Th1InvK;
Sol{i+1,14} = Th2InvK;
%% Increment ’i’ and Update Values
LastT = T;
LastTh1 = Th1;
LastTh2 = Th2;
Lastw1 = w1;
Lastw2 = w2;
i = i+1;
end
%% Create Excel File Out of Table Produced
xlswrite(’Exoskeleton_Kinematics_Data.xls’,Sol);
’Done’
10.2.2 Solve Inverse Dynamics
Input angular position and time data to output velocity and acceleration data, and torque and powerrequirement data.
%% Hold All Known Values and Matrices
% Input value of extension (0 if no extension) here
E = 0;
syms Th1(a) Th2(b) w1(c) w2(d)
%% Component Lengths (inches)
% key for naming convention (numbers) in files
38

L1 = 16.5;
L2 = 15.41;
% width of 80/20 frame pieces
W1 = 1.5748;
W2 = 1.5748;
%% Component Distance to Center of Mass (from previous joint)
L1CM = 8.25;
L2CM = 7.705;
%% Components’ Weights (lbs)
M1 = 18;
M2 = 8.05;
%% Inertia Matrices
% Treating components as 2D rectangles which rotate about one end because rotation is only on one
plane
I1 = [0,0,0;
0,0,0;
0,0,((M1/12)*((L1^2)+(W1^2)))];
I2 = [0,0,0;
0,0,0;
0,0,((M2/12)*((L2^2)+(W2^2)))];
%% Displacement of Center of Mass Matrices
XcL1 = [L1CM*cos(Th1(a));
L1CM*sin(Th1(a));
0];
XcL2 = [L2CM*cos(Th1(a))+L2CM*cos(Th1(a)+Th2(b));
L2CM*sin(Th1(a))+L2CM*sin(Th1(a)+Th2(b));
0];
%% Gravity Matrix
g = [0;
386.0886;
0];
%% Angular Acceleration Matrices
W1 = [0;0;w1(c)];
W2 = [0;0;w1(c) + w2(d)];
%% Velocity Matrices (from Hip)
syms A B C D
VL1CM = [C*L1CM*cos(A), 0;
C*L1CM*sin(A), 0;
0,0] * [C;D];
VL2CM = [C*L2CM*cos(A) + C*L2CM*cos(A+B), D*L2CM*cos(A+B);
C*L2CM*sin(A) + C*L2CM*sin(A+B), D*L2CM*sin(A+B);
0,0] * [C;D];
%% Substitute A B C D for Appropriate Variables
VL1CM = subs(VL1CM, A, Th1(a));
VL1CM = subs(VL1CM, C, w1(c));
VL2CM = subs(VL2CM, A, Th1(a));
VL2CM = subs(VL2CM, B, Th2(b));
VL2CM = subs(VL2CM, C, w1(c));
VL2CM = subs(VL2CM, D, w2(d));
39

%% Find L to Solve for Forward and Inverse Dynamics (Torque and Acceleration)
% Solve first for hip, and then knee
% L = K - P
% K = .5*Mi*VCiT*Vci + .5wiT*Ii*wi
% P = Mi*gT*Xci
%% Calculate all K values (for Hip)
KH1 = (0.5*M1*VL1CM.’)*VL1CM + (0.5*W1.’)*W1;
KH2 = (0.5*M2*VL2CM.’)*VL2CM + (0.5*W2.’)*W2;
%% Calculate all P values (for Hip)
PH1 = (M1*g.’)*XcL1;
PH2 = (M2*g.’)*XcL2;
%% Sum up K and P, and Solve for L (for Hip)
KH = KH1+KH2;
PH = PH1+PH2;
LH = KH - PH;
%% Solve for Torque Necessary at Hip and Knee
% ti = (d/dt)(pdL/pdThi’)-(pdL/pdThi)
% Torque1
LpartialTh1 = diff(LH, a);
Lpartialw1 = diff(LH, c);
diffLpartialw1 = (diff(Lpartialw1, a)) + (diff(Lpartialw1, b)) + (diff(Lpartialw1, c)) -
(diff(Lpartialw1, d));
Torque1 = diffLpartialw1 - LpartialTh1;
% Torque2
LpartialTh2 = diff(LH, b);
Lpartialw2 = diff(LH, d);
diffLpartialw2 = (diff(Lpartialw2, a)) + (diff(Lpartialw2, b)) + (diff(Lpartialw2, c)) -
(diff(Lpartialw2, d));
Torque2 = diffLpartialw2 - LpartialTh2;
%% Create Output Matrix
Sol = {};
Sol{1,1} = ’Time (s)’;
Sol{1,2} = ’Theta1 (deg)’;
Sol{1,3} = ’Theta2 (deg)’;
Sol{1,4} = ’omega1 (deg/s)’;
Sol{1,5} = ’omega2 (deg/s)’;
Sol{1,6} = ’alpha1 (deg/s^2)’;
Sol{1,7} = ’alpha2 (deg/s^2)’;
Sol{1,8} = ’jerk1 (deg/s^3)’;
Sol{1,9} = ’jerk2 (deg/s^3)’;
Sol{1,10} = ’torque1 (N*m)’;
Sol{1,11} = ’torque2 (N*m)’;
Sol{1,12} = ’power1 (Hp)’;
40

Sol{1,13} = ’power2 (Hp)’;
Sol{1,14} = ’delTh1 (deg)’;
Sol{1,15} = ’delTh2 (deg)’;
Sol{1,16} = ’omega1 (rpm)’;
Sol{1,17} = ’omega2 (rpm)’;
%% Input Values to Solve for Torque 1 and 2
% Create matrix to hold input values
rawData = ’HipAndKneeData.xlsx’;
rawDataVals = xlsread(rawData);
kinematicsSolutions = ’Exoskeleton_Kinematics_Data.xls’;
kinematicsVals = xlsread(kinematicsSolutions);
% Initialize vAariables for iteration and input table size
n = 22; % number of rows in input table
i = 1; % starting row
LastT = 0;
LastTh1 = (270-(rawDataVals(1,3)))*(pi/180);
LastTh2 = (rawDataVals(1,4)*pi/180);
Lasttw1 = 0;
Lasttw2 = 0;
Lasta1 = 0;
Lasta2 = 0;
maxpow1 = 0;
maxpow2 = 0;
while i < n
%% Collect time from rawData
T = rawDataVals(i,2)*2.2;
% t for temporary
tTh1 = (kinematicsVals(i,1)*pi/180);
tTh2 = (kinematicsVals(i,2)*pi/180);
% make sure that 0/0 does not happen (producing NaN in excel sheet)
if tTh1 == LastTh1
tw1 = 0;
else
tw1 = (tTh1 - LastTh1)/(T - LastT);
end
if tTh2 == LastTh2
tw2 = 0;
else
tw2 = (tTh2 - LastTh2)/(T - LastT);
end
%tw1 = kinematicsVals(i,3)*pi/180;
%tw2 = kinematicsVals(i,4)*pi/180;
if tw1 == Lasttw1
a1 = 0;
else
a1 = (tw1 - Lasttw1)/(T - LastT);
end
if tw2 == Lasttw2
a2 = 0;
else
a2 = (tw2 - Lasttw2)/(T - LastT);
end
41

%a1 = kinematicsVals(i,5)*pi/180;
%a2 = kinematicsVals(i,6)*pi/180;
if a1 == Lasta1
jerk1 = 0;
else
jerk1 = (a1 - Lasta1)/(T - LastT);
end
if a2 == Lasta2
jerk2 = 0;
else
jerk2 = (a2 - Lasta2)/(T - LastT);
end
%% Solve for Torque 1 and 2
syms Th1(a) Th2(b) w1(c) w2(d)
% Replace all variables with actual values
TorqueSol1 = subs(Torque1, diff(w1(c), c, c), jerk1);
TorqueSol1 = subs(TorqueSol1, diff(w2(d), d, d), jerk2);
TorqueSol1 = subs(TorqueSol1, diff(Th1(a), a, a), a1);
TorqueSol1 = subs(TorqueSol1, diff(Th2(b), b, b), a2);
TorqueSol1 = subs(TorqueSol1, diff(w1(c), c), a1);
TorqueSol1 = subs(TorqueSol1, diff(w2(d), d), a2);
TorqueSol1 = subs(TorqueSol1, diff(Th1(a), a), tw1);
TorqueSol1 = subs(TorqueSol1, diff(Th2(b), b), tw2);
TorqueSol1 = subs(TorqueSol1, w1(c), tw1);
TorqueSol1 = subs(TorqueSol1, w2(d), tw2);
TorqueSol1 = subs(TorqueSol1, Th1(a), tTh1);
TorqueSol1 = subs(TorqueSol1, Th2(b), tTh2);
TorqueSol2 = subs(Torque2, diff(w1(c), c, c), jerk1);
TorqueSol2 = subs(TorqueSol2, diff(w2(d), d, d), jerk2);
TorqueSol2 = subs(TorqueSol2, diff(Th1(a), a, a), a1);
TorqueSol2 = subs(TorqueSol2, diff(Th2(b), b, b), a2);
TorqueSol2 = subs(TorqueSol2, diff(w1(c), c), a1);
TorqueSol2 = subs(TorqueSol2, diff(w2(d), d), a2);
TorqueSol2 = subs(TorqueSol2, diff(Th1(a), a), tw1);
TorqueSol2 = subs(TorqueSol2, diff(Th2(b), b), tw2);
TorqueSol2 = subs(TorqueSol2, w1(c), tw1);
TorqueSol2 = subs(TorqueSol2, w2(d), tw2);
TorqueSol2 = subs(TorqueSol2, Th1(a), tTh1);
TorqueSol2 = subs(TorqueSol2, Th2(b), tTh2);
%% Update Output Table
Sol{i+1,1} = T;
Sol{i+1,2} = tTh1*180/pi;
Sol{i+1,3} = tTh2*180/pi;
Sol{i+1,4} = tw1*180/pi;
Sol{i+1,5} = tw2*180/pi;
Sol{i+1,6} = a1*180/pi;
Sol{i+1,7} = a2*180/pi;
Sol{i+1,8} = jerk1*180/pi;
Sol{i+1,9} = jerk2*180/pi;
TS1 = simplify(TorqueSol1, ’Criterion’,’preferReal’, ’Steps’, 500);
TS2 = simplify(TorqueSol2, ’Criterion’,’preferReal’, ’Steps’, 500);
Sol{i+1,10} = double(TS1/8.85074579);
Sol{i+1,11} = double(TS2/8.85074579);
42

pow1 = (((double(TS1)/12)*tw1)*(60/2*pi))/5252; % ft*lb*rpm
pow2 = (((double(TS2)/12)*tw2)*(60/2*pi))/5252;
Sol{i+1,12} = pow1;
Sol{i+1,13} = pow2;
Sol{i+1,14} = (tTh1 - LastTh1)*180/pi;
Sol{i+1,15} = (tTh2 - LastTh2)*180/pi;
Sol{i+1,16} = (tw1*(60/2*pi)); % rad/sec -> rpm
Sol{i+1,17} = (tw2*(60/2*pi));
%% Update Variables and Increment ’i’
LastT = T;
LastTh1 = tTh1;
LastTh2 = tTh2;
Lasttw1 = tw1;
Lasttw2 = tw2;
Lasta1 = a1;
Lasta2 = a2;
if abs(pow1) > maxpow1
maxpow1 = abs(pow1);
end
if abs(pow2) > maxpow2
maxpow2 = abs(pow2);
end
step = i
i = i + 1;
end
xlswrite(’Exoskeleton_Dynamics_Data_V3_Lumped.xls’,Sol);
’Done’
maxpow1
maxpow2
10.3 Results of Theoretical Dynamic Analysis of Exoskeleton During Operation
10.4 Nomenclature
43

Table 4: Time & Joint Position vs. Joint Angular Velocity
Time (s) Position Hip (deg) Position Knee (deg) Hip Angular Vel. (deg/s) Knee Angular Vel. (deg/s)
0 256.5 4 0 00.165 257 11 3.03030303 42.424242420.33 258.5 22 9.090909091 66.666666670.495 260 21.5 9.090909091 -3.030303030.66 263.5 20 21.21212121 -9.0909090910.825 267 17.5 21.21212121 -15.151515150.99 268.5 14 9.090909091 -21.212121211.155 273 12 27.27272727 -12.121212121.32 275.5 10 15.15151515 -12.121212121.485 279 13 21.21212121 18.181818181.65 280 21 6.060606061 48.484848481.815 278 33 -12.12121212 72.727272731.98 274 44 -24.24242424 66.666666672.145 267 56 -42.42424242 72.727272732.31 262 61 -30.3030303 30.30303032.475 258 55 -24.24242424 -36.363636362.64 256.5 41 -9.090909091 -84.848484852.805 256 25 -3.03030303 -96.969696972.97 255.5 12.5 -3.03030303 -75.757575763.135 256 7 3.03030303 -33.333333333.3 257 5 6.060606061 -12.12121212
Table 5: Time & Joint Position vs. Joint Angular Acceleration
Time (s) Position Hip (deg) Position Knee (deg) Hip Angular Acc. (deg/s2) Knee Angular Acc. (deg/s2)
0 256.5 4 0 00.165 257 11 18.36547291 257.11662080.33 258.5 22 36.73094582 146.92378330.495 260 21.5 -9.63804E-15 -422.4058770.66 263.5 20 73.46189164 -36.730945820.825 267 17.5 -3.85522E-14 -36.730945820.99 268.5 14 -73.46189164 -36.730945821.155 273 12 110.1928375 55.096418731.32 275.5 10 -73.46189164 -8.67424E-141.485 279 13 36.73094582 183.65472911.65 280 21 -91.82736455 183.65472911.815 278 33 -110.1928375 146.92378331.98 274 44 -73.46189164 -36.730945822.145 267 56 -110.1928375 36.730945822.31 262 61 73.46189164 -257.11662082.475 258 55 36.73094582 -404.0404042.64 256.5 41 91.82736455 -293.84756662.805 256 25 36.73094582 -73.461891642.97 255.5 12.5 4.81902E-14 128.55831043.135 256 7 36.73094582 257.11662083.3 257 5 18.36547291 128.5583104
44

Table 6: Time & Joint Position vs. Joint Torque Requirements
Time (s) Position Hip (deg) Position Knee (deg) Required Hip Torque (N*m) Required Knee Torque(N*m)
0 256.5 4 0 00.165 257 11 -113.5410457 -4843.8389830.33 258.5 22 -115.5478658 -166.19811190.495 260 21.5 -178.6808154 -386.11507720.66 263.5 20 599.0560127 107.20151230.825 267 17.5 -245.548401 -200.3112950.99 268.5 14 152.6683889 -257.72088041.155 273 12 4015.236412 -177.0397721.32 275.5 10 379.7504441 -177.38782821.485 279 13 1441.020049 -461.46067471.65 280 21 729.4564974 -1423.0433911.815 278 33 439.6211757 181.21921.98 274 44 -670.6546902 6076.8257512.145 267 56 4413.22274 269.76011242.31 262 61 -2234.829848 198.85455312.475 258 55 887.6530917 -10281.017432.64 256.5 41 1609.46556 -17209.541932.805 256 25 541.4132537 9800.8562072.97 255.5 12.5 204.3092897 2624.0792583.135 256 7 -49.45672263 -1773.8541823.3 257 5 -251.6439584 -33.92309582
Table 7: Time & Joint Position vs. Joint Power Requirements
Time (s) Position Hip (deg) Position Knee (deg) Required Hip Power (Hp) Required Knee Power (Hp)
0 256.5 4 0 00.165 257 11 -0.079480639 -47.470760860.33 258.5 22 -0.24265634 -2.5595123260.495 260 21.5 -0.375238714 0.2702870380.66 263.5 20 2.935444884 -0.2251285770.825 267 17.5 -1.20321603 0.7011063520.99 268.5 14 0.320611308 1.262862611.155 273 12 25.29659626 0.4957232541.32 275.5 10 1.329158441 0.4966978351.485 279 13 7.061167638 -1.9381813311.65 280 21 1.021263596 -15.938468341.815 278 33 -1.230968823 3.0445555981.98 274 44 3.755756366 93.585361672.145 267 56 -43.25062043 4.5320786132.31 262 61 15.64418424 1.3920152662.475 258 55 -4.970976567 86.362618232.64 256.5 41 -3.379958761 337.3151142.805 256 25 -0.37899837 -219.54444592.97 255.5 12.5 -0.143019934 -45.92248873.135 256 7 -0.034620536 13.659004883.3 257 5 -0.352309994 0.094986947
45

Table 8: Nomenclature Table
Variable Description Unitsli Length of component i inchesθi Angular position of joint i degreesL LagrangianK Kinetic EnergyP Potential Energyτi Torque at joint i inch * lbsMi Mass of component i lbsVi Velocity matrix of component i inches / secondvi Velocity of component i inches / secondIi Moment of inertia for link i inch * lbsωi Angular velocity matrix for joint i degrees / secondJi Jacobian of component iXi Position matrix for component i inchesg Gravity matrix inches / second2
θi Angular velocity of joint i degrees / secondP (t) Power as a function of time WattsW Work JouleF Force NewtonI Current AmpereV tg Voltage VoltR Resistance Ohmv Velocity inches / secondp Pressure pounds / square inchQ Volumetric flow rate feet3/secondV ol Volume feet3
Ku Ultimate gainTu Oscillation periodKp Proportional gainKi Integral gainKd Derivative gainTF TransformerGY Gyrator
46