
Symmetric Mahler’s conjecture for the volume product in ... · Symmetric Mahler’s conjecture...
60
arXiv:1706.01749v3 [math.MG] 10 Jul 2019 Symmetric Mahler’s conjecture for the volume product in the three dimensional case Hiroshi Iriyeh ∗ and Masataka Shibata † July 11, 2019 Abstract In this paper, we prove Mahler’s conjecture concerning the volume product of centrally symmetric convex bodies in R n in the case where n = 3. More precisely, we show that for every three dimensional centrally symmetric convex body K ⊂ R 3 , the volume product |K||K ◦ | is greater than or equal to 32/3 with equality if and only if K or K ◦ is a parallelepiped (r1-1). 1 Introduction 1.1 Mahler’s conjecture for the volume product A convex body in R n is a compact convex set in R n with nonempty interior. Denote by K n the set of all convex bodies in R n . A convex body K ∈K n is said to be centrally symmetric if it satisfies K = −K . We denote by K n 0 the set of all K ∈K n which are centrally symmetric. Let K ∈K n be a convex body. The interior of K is denoted by int K . For z ∈ int K , the polar body of K with respect to z is defined by K z = {y ∈ R n ;(y − z) · (x − z) ≤ 1 for any x ∈ K } , where · denotes the standard inner product on R n . Denote by |K | the n-dimensional volume of K in R n . Then the volume product of K is defined by P (K ) := min z∈int K |K ||K z |. (1) Note that this quantity is an affine invariant, i.e., P (AK )= P (K ) for any invertible affine map A : R n → R n . It is well-known that for each K ∈K n the minimum of * College of Science, Ibaraki University, 2-1-1, Bunkyo, Mito, 310-8512, JAPAN e-mail: [email protected] † Department of Mathematics, Tokyo Institute of Technology, 2-12-1 Oh-okayama, Meguro-ku, Tokyo 152-8551, JAPAN e-mail: [email protected] The first author was partly supported by the Grant-in-Aid for Science Research (C) (No. 16K05120), JSPS. The second author was partly supported by the Grant-in-Aid for Science Research (C) (No. 18K03356), JSPS. 1
Transcript of Symmetric Mahler’s conjecture for the volume product in ... · Symmetric Mahler’s conjecture...

arX
iv:1
706.
0174
9v3
[m
ath.
MG
] 1
0 Ju
l 201
9
Symmetric Mahler’s conjecture for the volume
product in the three dimensional case
Hiroshi Iriyeh∗ and Masataka Shibata†
July 11, 2019
Abstract
In this paper, we prove Mahler’s conjecture concerning the volume productof centrally symmetric convex bodies in R
n in the case where n = 3. Moreprecisely, we show that for every three dimensional centrally symmetric convexbody K ⊂ R
3, the volume product |K| |K◦| is greater than or equal to 32/3with equality if and only if K or K◦ is a parallelepiped (r1-1).
1 Introduction
1.1 Mahler’s conjecture for the volume product
A convex body in Rn is a compact convex set in R
n with nonempty interior. Denoteby Kn the set of all convex bodies in R
n. A convex body K ∈ Kn is said to becentrally symmetric if it satisfies K = −K. We denote by Kn
0 the set of all K ∈ Kn
which are centrally symmetric.Let K ∈ Kn be a convex body. The interior of K is denoted by intK. For
z ∈ intK, the polar body of K with respect to z is defined by
Kz = {y ∈ Rn; (y − z) · (x− z) ≤ 1 for any x ∈ K} ,
where · denotes the standard inner product on Rn. Denote by |K| the n-dimensional
volume of K in Rn. Then the volume product of K is defined by
P(K) := minz∈intK
|K| |Kz|. (1)
Note that this quantity is an affine invariant, i.e., P(AK) = P(K) for any invertibleaffine map A : Rn → R
n. It is well-known that for each K ∈ Kn the minimum of
∗College of Science, Ibaraki University, 2-1-1, Bunkyo, Mito, 310-8512, JAPANe-mail: [email protected]
†Department of Mathematics, Tokyo Institute of Technology, 2-12-1 Oh-okayama, Meguro-ku,Tokyo 152-8551, JAPANe-mail: [email protected]
The first author was partly supported by the Grant-in-Aid for Science Research (C)(No. 16K05120), JSPS. The second author was partly supported by the Grant-in-Aid for ScienceResearch (C) (No. 18K03356), JSPS.
1

Mahler’s conjecture in the three dimensional case
(1) is attained at the unique point z on K, which is called Santaló point of K (see[Sc1]). For a centrally symmetric convex body K ∈ Kn
0 , the Santaló point of Kis nothing but the origin O. In the following, the polar of K with respect to O isdenoted by K◦.
The upper bound for P(K) is well-known as Blaschke-Santaló inequality (see[Sa]) and the bound is attained only for ellipsoids (see [MP]). In contrast, the sharplower bound estimate is fairly difficult and it remains as a longstanding open problemsince 1939 as follows.
Conjecture (Symmetric Mahler’s conjecture; [Ma2]). Any K ∈ Kn0 satisfies that
P(K) = |K| |K◦| ≥ 4n
n!. (2)
This is trivial for n = 1 and was proved by Mahler himself for n = 2 [Ma1].There are many alternative proofs and the characterization of the equality case forn = 2 (see, e.g., [Me], [Sc1, Section 10.7], and references therein). However, thecase where n ≥ 3 is still widely open. We solve affirmatively symmetric Mahler’sconjecture in the three dimensional case.
Theorem 1.1. For any three dimensional centrally symmetric convex body K ∈ K30,
we have
|K| |K◦| ≥ 32
3,
with equality if and only if either K or K◦ is a parallelepiped.
Further, we exhibit known partial results about the conjecture. An asymptoticlower bound of the volume product was first given by Bourgain and Milman [BM]and the best known constant is due to Kuperberg [K]. Meanwhile, the conjectureitself has been proved for very restricted cases; for zonoids by Reisner [R, R2] (seealso [GMR]) and for unconditional bodies by Saint-Raymond [SR] (see [Me2] for ashort proof). Note that the equality of (2) is attained by an n-cube, for instance. In[NPRZ], the estimate (2) was confirmed for K ∈ Kn
0 sufficiently close to the unit n-cube in the Banach-Mazur distance. For other partial results, see e.g., [BF], [FMZ],[LR], [RSW].
There is another question when K ∈ Kn is not necessarily assumed to be centrallysymmetric.
Conjecture (Non-symmetric Mahler’s conjecture). Any K ∈ Kn satisfies that
P(K) = minz∈intK
|K| |Kz| ≥ (n+ 1)n+1
(n!)2.
This was proved by Mahler for n = 2 (see [Ma1]). The alternative proof ofMahler’s result by Meyer [Me] is notable. Indeed, we were able to extract an impor-tant idea for attacking to the three dimensional symmetric case from [Me]. The idea,which is sketched in Section 1.3, improves the method of [Me2] for unconditionalbodies. Note that non-symmetric Mahler’s conjecture remains open for n ≥ 3, seee.g., [BF], [FMZ], [KR], [RSW].
2

Mahler’s conjecture in the three dimensional case
1.2 An application to Viterbo’s conjecture
Recently, a surprising connection between symmetric Mahler’s conjecture and aconjecture in the field of symplectic geometry was discovered. In 2000, Viterboposed in [V] an isoperimetric-type conjecture for symplectic capacities of convexbodies in R
2n with the standard symplectic structure ω0. A symplectic capacityc is a symplectic invariant which assigns a non-negative real number to each ofsymplectic manifolds of dimension 2n. The Hofer-Zehnder capacity cHZ is one ofthe important symplectic capacities, which is related to Hamiltonian dynamics onsymplectic manifolds. For details, see [AKO] or a foundational book [HZ].
Conjecture (Viterbo [V]). For any symplectic capacity c and any convex bodyΣ ∈ K2n,
c(Σ)
c(B2n)≤(
vol(Σ)
vol(B2n)
)1/n
(3)
holds, where B2n denotes the 2n-dimensional unit ball and vol(Σ) denotes the sym-plectic volume of Σ.
This conjecture is unsolved even in the case of n = 2. Note that c(B2n) = π.In [AKO], Artstein-Avidan, Karasev, and Ostrover calculated the Hofer-Zehndercapacity of a convex domain K ×K◦ ⊂ R
2n (K ∈ Kn0 ) as follows.
Theorem 1.2 ([AKO], Theorem 1.7). For any centrally symmetric convex bodyK ∈ Kn
0 , we havecHZ(K ×K◦) = 4.
Using it, they gave the following remarkable observation that Viterbo’s conjectureimplies symmetric Mahler’s conjecture (see [AKO, Section 1]).
4n
πn=cHZ(K ×K◦)n
πn≤ vol(K ×K◦)
πn/n!=
|K||K◦|πn/n!
.
Conversely, if we assume that symmetric Mahler’s conjecture holds, then The-orem 1.2 implies the inequality (3) for the case that c = cHZ and Σ = K × K◦.Therefore, Theorem 1.1 immediately yields
Corollary 1.3. Let K ⊂ R3 be a centrally symmetric convex body. Then the in-
equality (3) holds for Σ = K × K◦ ⊂ (R6, ω0) with respect to the Hofer-Zehndercapacity cHZ.
Of course, due to the result of [Ma1], the inequality (3) also holds for Σ =K ×K◦ ⊂ (R4, ω0), where K ∈ K2
0, with respect to cHZ.
1.3 Organization of the paper and our method
In Section 2, we review the two dimensional case based on the argument in [Me2]with a slight modification. Let K ∈ K2
0. Let B (resp.C) be the intersection of∂K and the positive part of x (resp. y) axis. First, by using coordinate axises,we divide K into four parts ±K++,±K−+. In [Me2], K is supposed to be an
3

Mahler’s conjecture in the three dimensional case
unconditional body, which means that the four parts are all congruent and hence itsuffices to consider K++ in the first quadrant, and K◦ is also unconditional. Then,for any point P ∈ K++, the area |K++| is estimated from below by the area of aquadrilateral OBPC, which gives a test point in K◦
++. The same observation onK◦ yields another test point in K++. By paring these two points, we easily getP(K) ≥ 8. In the general case, we may assume that |K++| = |K−+|. Although K◦
is not any longer unconditional, we can find an appropriate division of K◦ by usingthe points B◦, C◦ ∈ ∂K◦ with B◦ ·B = 1, C◦ ·C = 1 (see e.g., [BMMR, Section 4]).Including the equality case we sketch a proof in Section 2.
From Section 3, we begin the proof of the three dimensional case. We first divideK into eight parts K±±± as in the two dimensional case. However, compare to thetwo dimensional case, to make the corresponding decomposition of K◦ is not sosimple. The first ingredient of our proof of Theorem 1.1 is to concentrate only onthe class of convex bodies K ∈ K3
0 which are strongly convex and C∞ boundary. Asmoothing approximation procedure (Proposition 5.4) guarantees that the problemis reduced to considering only this class. For a convex body K in the class, we candefine a diffeomorphism ∂K → ∂K◦, which yields the corresponding eight piecesdecomposition K◦
±±± of K◦ from that of K. The precise setting is explained inSection 3.2.
The second ingredient is that only a few test points give a sharp estimate ofP(K), provided K has an additional symmetry. When n = 2, the symmetry weneed is |K++| = |K−+|, although this is not an essential assumption. When n = 3,we have to control not only the volume of K±±± but also the areas of boundary facesof K±±± in the three coordinate planes. In Section 3.4, we give a sharp estimate ofP(K) from below under the condition that K has “good” symmetries. The conditionis (10). Under this condition, the process of estimating P(K) is regarded as a directgeneralization of the two dimensional case. A (signed) volume comparison inequality(Lemma 3.1) which yields test points on K and K◦ is given in Section 3.3.
How can we release K from the very strong condition (10)? Note that P(K)is invariant under linear transformations of R
3. The third ingredient is to makethe most of the freedom of the action of linear transformations. As a test case, inAppendix B, we prove Theorem 1.1 for K ∈ K3
0 equipped with an extra symmetrywith respect to a hyperplane through O (Proposition B.1). In this case, by a lineartransformation A, we can deform K into AK which satisfies the condition (10)by means of the intermediate value theorem. However, for a general K ∈ K3
0 tofind a linear transformation A such that AK satisfies the condition (10) is highlynontrivial.
Sections 4 and 5, which are the technical part of the present paper, are de-voted to find an appropriate linear transformation A for each K ∈ K3
0 which isstrongly convex with smooth boundary ∂K. We proceed as follows. First, we defineK(θ, φ, ψ) ∈ K3
0 as the image of the initial K under the action of SO(3). (Here,θ, φ, ψ mean rotation angles with x, y, z-axises, respectively.) Next, in Section 4.1we define a linear transform A such that AK(θ, φ, ψ) satisfies the condition (11)(Proposition 4.2), which is a partial condition of (10). Finally, to get the full con-dition (10) for AK(θ, φ, ψ), we introduce in Section 4.2 three smooth functionsF (K), G(K), H(K) on a contractible region D ⊂ R
3 with the coordinates θ, φ, ψ.
4

Mahler’s conjecture in the three dimensional case
These functions are defined by the volume of pieces of the eight part decompositionof AK(θ, φ, ψ) and the resulting two dimensional quantities. Then the problem tofind AK which satisfies the desired condition (10) is reduced to the existence of azero (θ, φ, ψ) of the map (F,G,H) : D → R
3. Here, if (F,G,H) has no zero on ∂D,then we can define a map
F =(F,G,H)√F 2 +G2 +H2
: ∂D → S2.
From Section 4.3 to 4.7, we discuss properties of the map (F,G,H) in order to cal-culate the degree of the map F . The centrally symmetric convex body AK(θ, φ, ψ)equips with additional symmetries under rotations by specific angles around x, y, z-axises. These induces certain symmetries of the functions F,G, and H (Lemmas 4.6,4.7, 4.9, and 4.11). The results are summarized in Proposition 4.13 and essential forthe degree calculation in the next section.
In Section 5, we actually prove that deg F 6= 0 after a suitable perturbation ofthis map F . This immediately implies the existence of a zero of the map (F,G,H).Note that the smoothness of ∂K also has enough merit to the calculation of deg F .The construction of the above perturbation of F is technical, so it is discussedin Appendix A. Anyway the perturbed F equips with (±1, 0, 0) as regular values.This fact is crucial for the calculation of deg F . Indeed, it enables us to reduce thecalculation of deg F to the calculation of the winding number of a map G : S1 → S1
(Proposition 5.2), which is fairly accessible. We see that the winding number of G
is odd. This reduction process is explained in Section 5.3 and the calculation ofthe winding number of the map G is carried out in Section 5.4. Consequently, theexistence of a zero of the map (F,G,H) ensures that P(K) ≥ 32/3 for any convexbody K ∈ K3
0 which is strongly convex with C∞ boundary. Finally, a smoothingapproximation theorem implies that the inequality holds for all K ∈ K3
0.In Section 6, we determine the equality condition (Propositions 6.3 and 6.4).
First, for a general K ∈ K30 with P(K) = 32/3, we find a linear transformation A
such that AK satisfies the condition (10). Indeed, there exists a sequence {Kn}n∈N
such that limn→∞Kn = K, each Kn ∈ K30 is strongly convex with smooth boundary.
By the results in Sections 4 and 5, there exists {An}n∈N such that each AnKn satisfiesthe condition (10). As the limit of a subsequence, we get the required A. Moreover,from P(K) = 32/3, we can show that Pi(K
◦) = (Qi(K))◦ and |Qi(K)||Pi(K◦)| = 8where Qi is the cross section with a coordinate plane and Pi is the projection to thecoordinate plane (i = 1, 2, 3). Thus, the result of the two dimensional case ([Me2],[R2]) implies that Qi(K) and Pi(K
◦) are parallelograms. Next, we extend the sharpestimate in Section 3.4. Then we see K is polyhedron with at most 20 vertices.Finally, by case analysis and calculating the dual faces of the vertices, we prove thateither K or K◦ is a parallelepiped.
2 The two dimensional case
In this section, we sketch the proof of Mahler’s theorem for the two dimensionalcase based on the argument in [Me2] (see also [BF, Section 2], [BMMR, Section4]), because the equality case of Proposition 2.2 below will be used in Section 6.
5

Mahler’s conjecture in the three dimensional case
Although [Me2] treats only unconditional bodies, its slight modification yields thefollowing
Theorem 2.1 ([Ma1], [R2]). Let K ∈ K20. Then P(K) ≥ 8 with equality if and only
if K is a parallelogram.
To prove it, for K ∈ K20, we divide K into the following four pieces:
K++ := K ∩{(x, y) ∈ R
2; x ≥ 0, y ≥ 0}, K−− := −K++,
K−+ := K ∩{(x, y) ∈ R
2; x ≤ 0, y ≥ 0}, K+− := −K−+.
Theorem 2.1 is an easy consequence of the following
Proposition 2.2. Let K ∈ K20. Suppose that |K++| = |K−+| = |K|/4, (1, 0), (0, 1) ∈
∂K. Then P(K) ≥ 8 holds. In addition, when P(K) = 8, there exists a constanta ∈ (−1, 1] such that
K = conv{ ±1
1 + a2(1 − a, 1 + a),
±1
1 + a2(−1 − a, 1 − a)
},
K◦ = conv {±(1, a),±(−a, 1)} .(4)
Especially, K and K◦ are squares, |K| = 4/(1 + a2), and |K◦| = 2(1 + a2).
Proof of Theorem 2.1. Since the volume product P(K) is invariant under rotationsof K around the origin O = (0, 0), we may assume that |K++| = |K−+| owing tothe intermediate value theorem. By the assumption that K is centrally symmetric,this means that
|K++| = |K−+| =|K|4. (5)
The condition (5) is preserved under scaling by a diagonal matrix. Therefore, forany K ∈ K2
0, there exists a linear transformation A such that AK ∈ K20 satisfies the
assumptions of Proposition 2.2. Hence, P(K) = P(AK) ≥ 8. If P(K) = 8, thenAK is a square. That is, K is a parallelogram.
Proof of Proposition 2.2. We put B := (1, 0), C := (0, 1). By the definition of thepolar K◦, we have ±u = ±B · (u, v) ≤ 1,±v = ±C · (u, v) ≤ 1 for any (u, v) ∈ K◦.Hence, K◦ ⊂ [−1, 1] × [−1, 1]. If (1, 1) ∈ K◦, then we have x + y ≤ 1 for any(x, y) ∈ K. The convexity of K++, K−+ and their area estimates easily yield K =conv {±(1, 0),±(0, 1)}. This means (4) holds with a = 1. Similarly, if (−1, 1) ∈ K◦,then we get the same conclusion. Thus, since K is centrally symmetric, it is sufficientto consider the case where
K◦ ⊂ [−1, 1] × [−1, 1] \ {±(1, 1),±(−1, 1)}. (6)
Since B,C ∈ ∂K, by (6) and the definition ofK◦, there exist pointsB◦ = (1, b), C◦ =(c, 1) ∈ K◦ with b, c ∈ (−1, 1) satisfying that B ·B◦ = 1 and C ·C◦ = 1. (Note thatthese points are not necessarily unique in general.) The points B◦ and C◦ enable usto divide K◦ into the following:
K◦++ := K◦ ∩
{(u, v) ∈ R
2; v ≥ bu, cv ≤ u}, K◦
−− := −K◦++,
K◦−+ := K◦ ∩
{(u, v) ∈ R
2; v ≥ bu, cv ≥ u}, K◦
+− := −K◦−+.
6

Mahler’s conjecture in the three dimensional case
Now we shall find test points to estimate P(K). For any P = (u, v) ∈ K◦, thesum of the signed area of the triangle OB◦P and that of the triangle OPC◦ is lessthan or equal to |K◦
++|, that is,
1
2
∣∣∣∣∣1 bu v
∣∣∣∣∣+1
2
∣∣∣∣∣u vc 1
∣∣∣∣∣ ≤ |K◦++|.
This inequality with b, c ∈ (−1, 1) implies S1 := (1 − b, 1 − c)/(2|K◦++|) ∈ K++. A
similar argument for the piece K◦−+ yields S2 := (−1 − b, 1 + c)/(2|K◦
−+|) ∈ K−+.Repeating the same arguments for K++ and K−+, we have two test points in K◦:R1 := 2(1, 1)/|K|, R2 := 2(−1, 1)/|K|. Since R1 · S1 ≤ 1, R2 · S2 ≤ 1, that is,
(1, 1) · (1 − b, 1 − c) ≤ |K||K◦++|, (−1, 1) · (−1 − b, 1 + c) ≤ |K||K◦
−+|,
we obtain P(K) = |K||K◦| = 2|K|(|K◦++| + |K◦
−+|) ≥ 8.Hereafter, let us determine the equality condition. Now suppose that P(K) = 8.
Since K ⊃ conv{±(1, 0),±(0, 1)}, we have |K| ≥ 2. If |K| = 2, then we getK◦ = [−1, 1] × [−1, 1], which contradicts to (6). Thus |K| > 2 holds. We consider
polygon {O,B, S1, C} ⊂ K++, polygon {O,C, S2,−B} ⊂ K−+,
where polygon {P1, . . . , Pm} denotes the star-shaped polygon in R2 consists of suc-
cessive vertices P1, . . . , Pm (m ≥ 3) in the counterclockwise order and the edgesP1P2, . . . , Pm−1Pm, PmP1. Taking the volume of these polygons into account, we seethat they coincide with K++, K−+, respectively, and
|K◦++| =
2 − b− c
|K| , |K◦−+| =
2 + b+ c
|K| . (7)
Consequently, we have K = polygon {B, S1, C, S2,−B,−S1,−C,−S2}. Similarly,K◦ = polygon {B◦, R1, C
◦, R2,−B◦,−R1,−C◦,−R2}.Next, we consider the dual faces of the edges of K. Since the line segment BS1
is a part of an edge of K, its dual face is a vertex of K◦, which is calculated as
(1,
2|K◦++| − 1 + b
1 − c
).
This point must be one of the elements of {±B◦,±R1,±C◦,±R2}. Since c ∈ (−1, 1)
and |K| > 2, we have(1, (2|K◦
++| − 1 + b)/(1 − c))
= B◦ = (1, b). Hence |K◦++| =
(1−bc)/2. From the same argument for CS2, we have |K◦−+| = (1−bc)/2. Moreover,
c = −b holds by (7). Then, we have |K◦++| = |K◦
−+| = 2/|K| = (1 + b2)/2 andS1 = (1 − b, 1 + b)/(1 + b2), S2 = (−1 − b, 1 − b)/(1 + b2). Consequently, we obtain
K = conv{±S1,±S2} = conv{
± 1
1 + b2(1 − b, 1 + b) ,± 1
1 + b2(−1 − b, 1 − b)
}
with |K| = 4/(1+b2). Then K◦ = conv {±(1, b),±(−b, 1)} and |K◦| = 2(1+b2).
7

Mahler’s conjecture in the three dimensional case
3 A sharp estimate for the three dimensional vol-
ume product
3.1 Preliminaries
Let K ∈ Kn with O ∈ intK and denote by µK its Minkowski gauge. Assume ∂K is aC∞-hypersurface in R
n. K is called strongly convex if a C∞-function µ2K(x)/2 on R
n
is strongly convex, i.e., the Hessian matrix D2(µ2K/2)(x) is positive definite for each
x with |x| = 1. Then Λ := ∇(µ2K/2) = ∇µK : ∂K → ∂K◦ is a C∞-diffeomorphism.
If K is C∞ strongly convex, then K◦ is C∞ strongly convex (see [Sc1, Section 1.7.2]).
3.2 Convex bodies in R3
From now on, we focus on centrally symmetric convex bodies in R3. Denote by K
the set of all centrally symmetric convex bodies K ∈ K30 which are strongly convex
with smooth boundary ∂K. Throughout this paper, for a convex body K ∈ K3 wefix the orientation on K induced from the natural orientation of R3. From it theorientation of the boundary ∂K, that of any domain S on ∂K and that of ∂S (thatis, a closed curve on ∂K) are induced, respectively. For a point P = (p1, p2, p3) inR
3 we write −P = (−p1,−p2,−p3). If K ∈ K and P ∈ K, then −P ∈ K. Note thatρK(P )P ∈ ∂K for any P ∈ R
3 \ {O}, where ρK := 1/µK is the radial function of K.For K ∈ K and any distinct two points P,Q ∈ ∂K with P 6= −Q, let us introducean oriented curve from P to Q on the boundary ∂K defined by
CK(P,Q) := {ρK((1 − t)P + tQ)((1 − t)P + tQ); 0 ≤ t ≤ 1} .
We call it an oriented segment on ∂K. The polar body of K ∈ K is given by
K◦ ={
(u, v, w) ∈ R3; (u, v, w) · (x, y, z) ≤ 1 for all (x, y, z) ∈ K
},
which is also an element of K. Note that O ∈ intK◦ and (K◦)◦ = K.Let K ∈ K. First, we decompose the convex body K into eight pieces. We
choose an orthonormal basis (e1, e2, e3) of R3 and take six points
A± := ±R+e1 ∩ ∂K, B± := ±R+e2 ∩ ∂K, C± := ±R+e3 ∩ ∂K
on the boundary ∂K, and consider six oriented segments on ∂K as follows:
α := α(K) = CK(B+, C+), a := a(K) = CK(C+, B−),
β := β(K) = CK(C+, A+), b := b(K) = CK(A+, C−),
γ := γ(K) = CK(A+, B+), c := c(K) = CK(B+, A−).
Then another six segments −α,−β,−γ,−a,−b, and −c on ∂K are automaticallydefined. We denote by Qi(K) (i = 1, 2, 3) the sections of K by the yz-plane, zx-plane, and xy-plane, respectively. Note that, for instance, in the yz-plane Q1(K) is astrongly convex set whose boundary consists of the successive arcs α, a,−α,−a. Forsmooth curves c(t), d(t) (0 ≤ t ≤ 1) in R
3 such that the terminal point of c coincideswith the initial point of d, denote by c ∪ d the piecewise smooth curve which starts
8

Mahler’s conjecture in the three dimensional case
OB+B−
C+
C−
A−
A+
α
−α
a
−a
c
−c
−γ
γ
β
−β
b
−b
y
z
x
K+++
K−++K−−+
K+−+
K++−
K−+−K−−−
K+−−
at c(0) and ends at d(1). Then closed curves α∪ a∪ −α∪ −a, β ∪ b∪ −β ∪ −b, andγ ∪ c ∪ −γ ∪ −c mutually do not intersect except for A±, B±, C±.
For an oriented simple closed curve c on ∂K denote by SK(c) ⊂ ∂K the piece ofsurface enclosed by c with the orientation compatible with that of c. In this paper,we always equip SK(c) with this orientation. We denote by O ∗ SK(c) the truncatedcone over SK(c):
O ∗ SK(c) = {λu; u ∈ SK(c) and 0 ≤ λ ≤ 1}.
Using this notation, we divide K into the following eight pieces:
K+++ := O ∗ SK(α ∪ β ∪ γ), K−++ := O ∗ SK(α ∪ c ∪ −b),K−−+ := O ∗ SK(a ∪ −b ∪ −γ), K+−+ := O ∗ SK(a ∪ −c ∪ β),
K++− := O ∗ SK(−a ∪ γ ∪ b), K−+− := O ∗ SK(−a ∪ −β ∪ c),
K−−− := O ∗ SK(−α ∪ −γ ∪ −β), K+−− := O ∗ SK(−α ∪ b ∪ −c),
where for a curve c ⊂ R3, denote by c the curve which has the same image as c with
the reverse orientation, that is, c(t) = c(1 − t) (0 ≤ t ≤ 1).Next, we decompose the polar body K◦ into eight pieces associated to the above
decomposition of K. Using the map Λ : ∂K → ∂K◦ defined in Section 3.1, we putsix points and six curves on ∂K◦ as follows:
A◦± := Λ(A±), B◦
± := Λ(B±), C◦± := Λ(C±);
α◦ := Λ(α), a◦ := Λ(a), β◦ := Λ(β), b◦ := Λ(b), γ◦ := Λ(γ), c◦ := Λ(c).
From the definition of the polar body and the strong convexity of K◦, the pointA◦
+ (resp. B◦+, C
◦+) is the unique point with the maximal u-coordinate (resp. v-
coordinate, w-coordinate) among all the points in K◦.Since Λ : ∂K → ∂K◦ is a C∞-diffeomorphism, smooth closed curves α◦ ∪ a◦ ∪
−α◦ ∪ −a◦, β◦ ∪ b◦ ∪ −β◦ ∪ −b◦, and γ◦ ∪ c◦ ∪ −γ◦ ∪ −c◦ on ∂K◦ are mutually do
9

Mahler’s conjecture in the three dimensional case
B◦
+
C◦
+
A◦
+
α◦
γ◦
β◦
v
w
u
O
K◦
+++
not intersect except for A◦±, B
◦±, C
◦±. Thus we can define a decomposition of K◦ into
the following eight pieces
K◦+++ := O ∗ SK◦(α◦ ∪ β◦ ∪ γ◦), K◦
−++ := O ∗ SK◦(α◦ ∪ c◦ ∪ −b◦),
K◦−−+ := O ∗ SK◦(a◦ ∪ −b◦ ∪ −γ◦), K◦
+−+ := O ∗ SK◦(a◦ ∪ −c◦ ∪ β◦),
K◦++− := O ∗ SK◦(−a◦ ∪ γ◦ ∪ b◦), K◦
−+− := O ∗ SK◦(−a◦ ∪ −β◦ ∪ c◦),
K◦−−− := O ∗ SK◦(−α◦ ∪ −γ◦ ∪ −β◦), K◦
+−− := O ∗ SK◦(−α◦ ∪ b◦ ∪ −c◦),
which corresponds to the decomposition of K described before.Denote by Pi (i = 1, 2, 3) the orthogonal projections to the vw-plane, wu-plane
and uv-plane, respectively. Since K◦ ⊂ R3 is strongly convex, the projections
Pi(K◦) (i = 1, 2, 3) of K◦ are compact strongly convex domains in each plane.
Claim. The boundaries ∂(Pi(K◦)) (i = 1, 2, 3) coincide with smooth simple closed
curves P1(α◦ ∪a◦ ∪−α◦ ∪−a◦), P2(β
◦ ∪ b◦ ∪−β◦ ∪−b◦), and P3(γ◦ ∪c◦ ∪−γ◦ ∪−c◦),
respectively.
Proof. Fix a point Q ∈ ∂(Q1(K)). Since Q lies on the set
Q1(α ∪ a ∪ (−α) ∪ (−a)) = α ∪ a ∪ (−α) ∪ (−a),
Q is on one of the four segments in the right-hand side. If Q ∈ α, then thereexists t ∈ [0, 1] such that Q = α(t). By the definitions of α(t) and α◦(t), wehave α(t) = Q1(α(t)) = (0, α2(t), α3(t)), α◦(t) = (α◦
1(t), α◦2(t), α◦
3(t)), P1(α◦(t)) =
(0, α◦2(t), α
◦3(t)), and
1 = α(t) · α◦(t) = α2(t)α◦2(t) + α3(t)α◦
3(t) = Q1(α(t)) · P1(α◦(t)).
Combining it with the conditions α(t) = Q1(α(t)) ∈ ∂(Q1(K)) and P1(α◦(t)) ∈
P1(K◦), we find that P1(α
◦(t)) ∈ ∂P1(K◦). Considering other cases similarly, wehave
P1(α◦ ∪ a◦ ∪ (−α◦) ∪ (−a◦)) ⊂ ∂(P1(K◦)).
10

Mahler’s conjecture in the three dimensional case
On the other hand, for P ∈ ∂(P1(K◦)), there exists a point Q in ∂(Q1(K)) =Q1(α ∪ a ∪ (−α) ∪ (−a)) such that Q · P = 1. The point Q is represented, forinstance, by α(t) for some t ∈ [0, 1). By the definition, P := α◦(t) = Λ(α(t)) is theunique point on ∂K such that Q · P = 1. Moreover, by the strict convexity of K◦,we have P1(P ) = P . Hence,
∂(P1(K◦)) ⊂ P1(α◦ ∪ a◦ ∪ (−α◦) ∪ (−a◦))
also holds.
3.3 A volume estimate of a piece of K◦ from below
The next task is to estimate |K◦+++|, |K◦
−++|, . . . , |K◦+−−| from below. Consider
K◦+++ = O ∗ SK◦(α◦ ∪ β◦ ∪ γ◦), for instance. The boundary ∂K◦
+++ is the union ofthe cone
O ∗ (α◦ ∪ β◦ ∪ γ◦)
and K◦+++ ∩ ∂K◦. For any point P = (u, v, w) ∈ R
3, the signed volume of the cone
P ∗ (O ∗ (α◦ ∪ β◦ ∪ γ◦)) = {(1 − λ)P + λξ ∈ R3; ξ ∈ O ∗ (α◦ ∪ β◦ ∪ γ◦), 0 ≤ λ ≤ 1}
is defined by
1
6
∫ 1
0
∣∣∣∣∣∣∣
Pα◦(t)α◦′(t)
∣∣∣∣∣∣∣+
∣∣∣∣∣∣∣
Pβ◦(t)β◦′(t)
∣∣∣∣∣∣∣+
∣∣∣∣∣∣∣
Pγ◦(t)γ◦′(t)
∣∣∣∣∣∣∣
dt, (8)
where α◦(t) = (α◦1(t), α◦
2(t), α◦3(t)) and | · | denotes the determinant for a square
matrix. Here we put
α◦1 :=
∫ 1
0
∣∣∣∣∣α◦
2(t) α◦3(t)
α◦2
′(t) α◦3
′(t)
∣∣∣∣∣ dt, α◦2 :=
∫ 1
0
∣∣∣∣∣α◦
3(t) α◦1(t)
α◦3
′(t) α◦1
′(t)
∣∣∣∣∣ dt, α◦3 :=
∫ 1
0
∣∣∣∣∣α◦
1(t) α◦2(t)
α◦1
′(t) α◦2
′(t)
∣∣∣∣∣ dt,
then we have∫ 1
0
∣∣∣∣∣∣∣
Pα◦(t)α◦′(t)
∣∣∣∣∣∣∣dt = (α◦
1, α◦2, α
◦3) · (u, v, w).
For simplicity, we put α◦ := (α◦1, α
◦2, α
◦3). Similarly, we define a◦, β◦, b◦, γ◦, and c◦.
Then the signed volume (8) of the cone P ∗ (O ∗ (α◦ ∪ β◦ ∪ γ◦)) is represented as(α◦ + β◦ + γ◦) · (u, v, w)/6.
If the cone K◦+++ is convex in R
3 and P ∈ K◦+++, then the quantity (8) coincides
with the volume |P ∗ (O ∗ (α◦ ∪ β◦ ∪ γ◦))| and it is less than |K◦+++|, which is the
fact actually used in [Me2] and [BF]. In case K◦+++ ⊂ R
3 is not convex or P ∈ K◦ isnot in K◦
+++, the comparison of the signed volume (8) with |K◦+++| is a nontrivial
problem. However, under the condition that P lies in the convex set K◦ the followingholds, which is a key lemma to estimate P(K).
Lemma 3.1. Let K◦ ∈ K. For any point P = (u, v, w) ∈ K◦, we have
(α◦ + β◦ + γ◦) · (u, v, w) ≤ 6|K◦+++|.
11

Mahler’s conjecture in the three dimensional case
By the definition of polar, we obtain
1
6|K◦+++|
(α◦ + β◦ + γ◦
)∈ K.
For the other seven parts similar estimates hold (see the table below).
Lemma 3.1 is a direct consequence of the following
Proposition 3.2. Let K ∈ K. Let c be a piecewise smooth, oriented, simple closedcurve on ∂K. Let SK(c) ⊂ ∂K be a piece of surface enclosed by the curve c. Thenfor any point P ∈ K, the inequality
1
6
∫
c(P × r) · dr ≤ |O ∗ SK(c)|
holds.
Proof. Let S be the boundary of the truncated cone O ∗ SK(c) and S0 := S \ SK(c).Then S is a piecewise smooth surface. Let r be the position vector on S and n theoutward unit normal vector of S at r.
Since the vector r on S0 is perpendicular to the normal vector n at the point,we have r · n = 0 on S0. Hence, by the divergence theorem,
∫SK(c) r · n dA =∫
O∗SK(c) div r dxdydz = 3|O ∗ SK(c)| holds, where dA denotes the area element.On the other hand, on SK(c) we have P · n ≤ r · n for any P ∈ K, because the
support function hK(n) := maxP∈K P · n attains the maximum at r. Integratingon SK(c), we have
∫
SK(c)P · n dA ≤
∫
SK(c)r · n dA = 3|O ∗ SK(c)|.
Since the rotation of P × r is calculated as 2P , by Stokes’ formula, the left-handside is equal to (1/2)
∫c(P × r) · dr, which yields the result.
To discuss the other seven parts of K◦ we need further preparations. For thecurve α◦ on ∂K◦ defined by α◦(t) = α◦(1 − t) (0 ≤ t ≤ 1), we have
(α◦) · (u, v, w) =∫ 1
0
∣∣∣∣∣∣∣
Pα◦(1 − t)
(α◦(1 − t))′
∣∣∣∣∣∣∣dt = −
∫ 1
0
∣∣∣∣∣∣∣
Pα◦(1 − t)α◦′(1 − t)
∣∣∣∣∣∣∣dt = −α◦ · (u, v, w)
for any P = (u, v, w) ∈ R3. Moreover, since
(−α◦) · (u, v, w) =∫ 1
0
∣∣∣∣∣∣∣
P−α◦(t)−α◦′(t)
∣∣∣∣∣∣∣dt = α◦ · (u, v, w),
we obtain(α◦) = −α◦, (−α◦) = α◦, (−α◦) = (−α◦) = −α◦.
We can do the same observation for K◦−++, K◦
−−+, and K◦+−+. Since K◦ is
centrally symmetric, the volume of K◦++−, K◦
−+−, K◦−−−, and K◦
+−− equals that ofK◦
−−+, K◦+−+, K◦
+++, and K◦−++, respectively.
Summarizing the above arguments, we obtain
12

Mahler’s conjecture in the three dimensional case
point contained in K
K◦+++ = O ∗ SK◦(α◦ ∪ β◦ ∪ γ◦) S1 := 1
6|K◦
+++|
(α◦ + β◦ + γ◦
)
K◦−++ = O ∗ SK◦(α◦ ∪ c◦ ∪ −b◦) S2 := 1
6|K◦
−++|
(−α◦ + b◦ + c◦
)
K◦−−+ = O ∗ SK◦(a◦ ∪ −b◦ ∪ −γ◦) S3 := 1
6|K◦
−−+|
(−a◦ − b◦ + γ◦
)
K◦+−+ = O ∗ SK◦(a◦ ∪ −c◦ ∪ β◦) S4 := 1
6|K◦
+−+|
(a◦ − β◦ + c◦
)
Furthermore, similar arguments for the convex body K give the following results.Note that the calculation is easier than the case of the polar K◦, because the eightparts of K are convex.
point contained in K◦
K+++ = O ∗ SK(α ∪ β ∪ γ) R1 := 16|K+++|
(α + β + γ
)
K−++ = O ∗ SK(α ∪ c ∪ −b) R2 := 16|K−++|
(−α + b+ c
)
K−−+ = O ∗ SK(a ∪ −b ∪ −γ) R3 := 16|K−−+|
(−a− b+ γ
)
K+−+ = O ∗ SK(a ∪ −c ∪ β) R4 := 16|K+−+|
(a− β + c
)
In Section 3.4, these eight points Ri, Si (i = 1, 2, 3, 4) will be effectively used astest points to estimate P(K) from below.
3.4 A sharp estimate
In this subsection, we give a sufficient condition of deducing inequality (2) (see thecondition (10) below). In the following sections, for any K ∈ K we carefully selecta linear transformation A such that AK ∈ K satisfies this condition.
From the arguments in Section 3.3, we know that Ri ∈ K◦ and Si ∈ K (i =1, 2, 3, 4). By the definition of polar, we obtain Ri · Si ≤ 1. In other words,
(α + β + γ
)·(α◦ + β◦ + γ◦
)≤ 36|K+++||K◦
+++|,(−α + b+ c
)·(−α◦ + b◦ + c◦
)≤ 36|K−++||K◦
−++|,(−a− b+ γ
)·(−a◦ − b◦ + γ◦
)≤ 36|K−−+||K◦
−−+|,(a− β + c
)·(a◦ − β◦ + c◦
)≤ 36|K+−+||K◦
+−+|.
(9)
Here, assume that
|K+++| = |K−++| = |K−−+| = |K+−+|, α = a, β = b, γ = c. (10)
We now check that this condition implies symmetric Mahler’s conjecture for thethree dimensional case. Indeed, the condition (10) yields the volume of each eightpart equals |K|/8, and hence equations (9) and (10) implies that
(α + β + γ
)·(α◦ + β◦ + γ◦
)≤ 9
2|K||K◦
+++|,(−α + β + γ
)·(−α◦ + b◦ + c◦
)≤ 9
2|K||K◦
−++|,(−α − β + γ
)·(−a◦ − b◦ + γ◦
)≤ 9
2|K||K◦
−−+|,(α − β + γ
)·(a◦ − β◦ + c◦
)≤ 9
2|K||K◦
+−+|.
13

Mahler’s conjecture in the three dimensional case
It then follows from these inequalities that
9
4|K||K◦| =
9
2|K|(|K◦
+++| + |K◦−++| + |K◦
−−+| + |K◦+−+|)
≥ α ·((α◦ + β◦ + γ◦
)−(−α◦ + b◦ + c◦
)−(−a◦ − b◦ + γ◦
)+(a◦ − β◦ + c◦
))
+ β ·((α◦ + β◦ + γ◦
)+(−α◦ + b◦ + c◦
)−(−a◦ − b◦ + γ◦
)−(a◦ − β◦ + c◦
))
+ γ ·((α◦ + β◦ + γ◦
)+(−α◦ + b◦ + c◦
)+(−a◦ − b◦ + γ◦
)+(a◦ − β◦ + c◦
))
= 2α · (α◦ + a◦) + 2β ·(β◦ + b◦
)+ 2γ · (γ◦ + c◦) .
Let us examine the first term in the last line. Recalling the definition of α◦ =(α◦
1, α◦2, α
◦3), its u-component α◦
1 is twice the area of the convex region O ∗ P1(α◦) in
the vw-plane. Similarly, a◦1 is twice |O ∗ P1(a
◦)|. Since K◦ ∈ K, the convex domainP1(K
◦) in the vw-plane is also centrally symmetric, and hence
α◦1 + a◦
1 = 2(|O ∗ P1(α◦)| + |O ∗ P1(a
◦)|) = |P1(K◦)|.
Again, since the curve α ⊂ K lies in the yz-plane, we have α = (α1, 0, 0), where
α1 =∫ 1
0
∣∣∣∣∣α2(t) α3(t)α′
2(t) α′3(t)
∣∣∣∣∣ dt.
Here α1 is nothing but twice the area of the convex region O ∗ α in the yz-plane.From the assumption that α = a in the condition (10), we have α1 = |Q1(K)|/2.Therefore, the first term 2α · (α◦ + a◦) is equal to |Q1(K)| |P1(K
◦)|. Applying thesame argument to the second and the third terms, we have
β◦2 + b◦
2 = |P2(K◦)|, γ◦
3 + c◦3 = |P3(K
◦)|and
2β = (0, |Q2(K)|, 0), 2γ = (0, 0, |Q3(K)|).Consequently, we obtain
9
4|K||K◦| ≥ |Q1(K)| |P1(K
◦)| + |Q2(K)| |P2(K◦)| + |Q3(K)| |P3(K
◦)|.
It is well-known that convex domains Qi(K) and Pi(K◦) are polar bodies of each
other (e.g. [GMR, p. 274]). By Mahler’s theorem [Ma1] (see also [R], [GMR], [MR],and Section 2), we have |Qi(K)| |Pi(K◦)| ≥ 42/2! = 8 (i = 1, 2, 3). Thus
|K| |K◦| ≥ 4
9× 8 × 3 =
32
3=
43
3!
holds. Hence we obtain
Proposition 3.3. If K ∈ K satisfies the condition (10), then P(K) ≥ 32/3.
4 The general case
The purpose of this and the next sections is to find a suitable linear transformationA for any centrally symmetric convex body K in K such that AK satisfies thecondition (10). In other words, we will find a basis of R3 such that the hypothesis(10) is satisfied.
14

Mahler’s conjecture in the three dimensional case
4.1 Linear transforms
In order to prove (2) for general K ∈ K30, we first consider some linear transform
of K ∈ K. For this purpose, we introduce some notations. For θ, φ, ψ ∈ R, X(θ),Y (φ), Z(ψ) denote rotations in R
3 as follows:
X(θ) =
1 0 00 cos θ − sin θ0 sin θ cos θ
, Y (φ) =
cosφ 0 sin φ0 1 0
− sin φ 0 cosφ
,
Z(ψ) =
cosψ − sinψ 0sinψ cosψ 0
0 0 1
.
Hereafter, we put K(θ, φ, ψ) := X(θ)Y (φ)Z(ψ)K.In this section, we choose a linear transform A = A(K) (depends on K) which
satisfies
|O ∗ β(AK)| = |O ∗ b(AK)|, |O ∗ γ(AK)| = |O ∗ c(AK)|,|(AK)+++| + |(AK)−++| = |(AK)−−+| + |(AK)+−+|, (11)
where AK = A(K)K. We use the following spherical coordinates:
P (ξ, η) = (cos ξ, sin ξ cos η, sin ξ sin η) ∈ S2.
First, we choose the angle Θ(K) ∈ (0, π) which satisfies that
∫ Θ(K)
0dη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ =
∫ π
Θ(K)dη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ. (12)
Since the left-hand side is increasing and the right-hand side is decreasing withrespect to Θ(K), we see that Θ(K) is uniquely determined. Actually, we have thefollowing
Lemma 4.1. For each K ∈ K, there exists the unique Θ(K) ∈ (0, π) satisfyingthe relation (12). Moreover, Θ(θ, φ, ψ) := Θ(K(θ, φ, ψ)) is smooth with respect to(θ, φ, ψ) ∈ R
3.
Proof. We put
I(Θ, θ, φ, ψ) :=∫ Θ
0dη∫ π
0ρ3K(θ,φ,ψ)(P (ξ, η)) sin ξ dξ
−∫ π
Θdη∫ π
0ρ3K(θ,φ,ψ)(P (ξ, η)) sin ξ dξ.
Since K ∈ K, by the definition of K(θ, φ, ψ), we see that I is smooth in R4. On the
other hand, since ρK(P (ξ, η)) > 0, we have
I(0, θ, φ, ψ) = −∫ π
0dη∫ π
0ρ3K(θ,φ,ψ)(P (ξ, η)) sin ξ dξ < 0,
I(π, θ, φ, ψ) =∫ π
0dη∫ π
0ρ3K(θ,φ,ψ)(P (ξ, η)) sin ξ dξ > 0,
∂I
∂Θ(Θ, θ, φ, ψ) = 2
∫ π
0ρ3K(θ,φ,ψ)(P (ξ,Θ)) sin ξ dξ > 0.
15

Mahler’s conjecture in the three dimensional case
By the intermediate value theorem, there exists the unique Θ(θ, φ, ψ) = Θ(K(θ, φ, ψ))such that I(Θ(θ, φ, ψ), θ, φ, ψ) = 0. Moreover, by the implicit function theorem, wesee that Θ(θ, φ, ψ) is smooth in R
3.
Next, we introduce the quantities Φ(K) ∈ (0, π) and Ψ(K) ∈ (0, π) defined by
∫ Φ(K)
0ρ2K(P (ξ, 0)) dξ =
∫ π
Φ(K)ρ2K(P (ξ, 0)) dξ,
∫ Ψ(K)
0ρ2K(P (ξ,Θ(K))) dξ =
∫ π
Ψ(K)ρ2K(P (ξ,Θ(K))) dξ.
Similarly as Θ(K), the above Φ(K) and Ψ(K) are uniquely determined for eachK ∈ K, and Φ(θ, φ, ψ) := Φ(K(θ, φ, ψ)) and Ψ(θ, φ, ψ) := Ψ(K(θ, φ, ψ)) are smoothfunctions on R
3. Now, we define A = A(K) as
A(K) :=
1 1tan(Φ(K))
1sin(Θ(K)) tan(Ψ(K))
0 1 1tan(Θ(K))
0 0 1
−1
.
Proposition 4.2. For every K ∈ K, the condition (11) holds for AK which is theimage of K by the above linear transform.
Proof. Denote by χA the characteristic function:
χA(P ) =
1 if P ∈ A,
0 if P 6∈ A.
Then we have
|(AK)+++| + |(AK)−++| − |(AK)−−+| − |(AK)+−+|=∫
{y>0,z>0}χAK(P ) dxdydz −
∫
{y<0,z>0}χAK(P ) dxdydz
=∫
{y>0,z>0}χK(A−1P ) dxdydz −
∫
{y<0,z>0}χK(A−1P ) dxdydz
=∫
{y−z/ tan(Θ(K))>0,z>0}χK(P ) dxdydz −
∫
{y−z/ tan(Θ(K))<0,z>0}χK(P ) dxdydz,
where we used the substitution P = A−1P , that is
xyz
= AP =
x− ytan(Φ(K))
− zsin(Θ(K)) tan(Ψ(K))
+ ztan(Φ(K)) tan(Θ(K))
y − ztan(Θ(K))
z
.
By using the polar coordinates x = r cos ξ, y = r sin ξ cos η, z = r sin ξ sin η, we have
y − z
tan(Θ(K))= r sin ξ cos η − r sin ξ sin η
tan(Θ(K))= z
(1
tan η− 1
tan(Θ(K))
).
16

Mahler’s conjecture in the three dimensional case
Under the condition r > 0 and sin ξ > 0, z > 0 if and only if 0 < η < π. Thus wehave
y − z
tan(Θ(K))> 0, z > 0 if and only if 0 < η < Θ(K),
y − z
tan(Θ(K))< 0, z > 0 if and only if Θ(K) < η < π.
Therefore, by Lemma 4.1, we have
|(AK)+++| + |(AK)−++| − |(AK)−−+| − |(AK)+−+|
=1
3
∫ Θ(K)
0dη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ − 1
3
∫ π
Θ(K)dη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ = 0.
Next, since
|O ∗ β(AK)| =∫
{x>0,y=0,z>0}χAK(P ) dxdz,
|O ∗ b(AK)| =∫
{x>0,y=0,z<0}χAK(P ) dxdz =
∫
{x<0,y=0,z>0}χAK(P ) dxdz,
by the substitution P = A−1P , we have
|O ∗ β(AK)| − |O ∗ b(AK)|=∫
{x>0,y=0,z>0}χK(A−1P ) dxdz −
∫
{x<0,y=0,z>0}χK(A−1P ) dxdz
=∫
{x−z/(sin(Θ(K)) tan(Ψ(K)))>0,y=z/ tan(Θ(K)),z>0}χK(P ) dxdz
−∫
{x−z/(sin(Θ(K)) tan(Ψ(K)))<0,y=z/ tan(Θ(K)),z>0}χK(P ) dxdz.
By using the above polar coordinates, if y = z/ tan(Θ(K)) and z > 0, then η =Θ(K) ∈ (0, π). Since
x− z
sin(Θ(K)) tan(Ψ(K))= r sin ξ
(1
tan ξ− 1
tan(Ψ(K))
),
we see that x − z/(sin(Θ(K)) tan(Ψ(K))) > 0 if and only if 0 < ξ < Ψ(K), andx − z/(sin(Θ(K)) tan(Ψ(K))) < 0 if and only if Ψ(K) < ξ < π. Thus, by thedefinition of Ψ(K), we obtain
|O ∗ β(AK)| − |O ∗ b(AK)|
= sin(Θ(K))
(∫
{r>0,0<ξ<Ψ(K)}χK(P (ξ,Θ(K)))r drdξ
−∫
{r>0,Ψ(K)<ξ<π}χK(P (ξ,Θ(K)))r drdξ
)
= sin(Θ(K))
(1
2
∫ Ψ(K)
0ρ2K(P (ξ,Θ(K))) dξ − 1
2
∫ π
Ψ(K)ρ2K(P (ξ,Θ(K))) dξ
)= 0.
17

Mahler’s conjecture in the three dimensional case
Finally, we show |O ∗ γ(AK)| = |O ∗ c(AK)| similarly. Since
|O ∗ γ(AK)| =∫
{x>0,y>0,z=0}χAK(P ) dxdy,
|O ∗ c(AK)| =∫
{x<0,y>0,z=0}χAK(P ) dxdy,
by the substitution P = A−1P , we have
|O ∗ γ(AK)| − |O ∗ c(AK)|=∫
{x>0,y>0,z=0}χK(A−1P ) dxdy −
∫
{x<0,y>0,z=0}χK(A−1P ) dxdy
=∫
{x−y/ tan(Φ(K))>0,y>0,z=0}χK(P ) dxdy −
∫
{x−y/ tan(Φ(K))<0,y>0,z=0}χK(P ) dxdy.
By using the same polar coordinates, for the case y > 0, z = 0, we have η = 0 and
x− y
tan(Φ(K))= r sin ξ
(1
tan ξ− 1
tan(Φ(K))
).
Hence, x−y/ tan(Φ(K)) > 0 if and only if 0 < ξ < Φ(K), and x−y/ tan(Φ(K)) < 0if and only if Φ(K) < ξ < π. Thus, by the definition of Φ(K), we obtain
|O ∗ γ(AK)| − |O ∗ c(AK)|=∫
{r>0,0<ξ<Φ(K)}χK(P (ξ, 0))r drdξ −
∫
{r>0,Φ(K)<ξ<π}χK(P (ξ, 0))r drdξ
=1
2
∫ Φ(K)
0ρ2K(P (ξ, 0)) dξ − 1
2
∫ π
Φ(K)ρ2K(P (ξ, 0)) dξ = 0.
4.2 Definition of a smooth map (F,G,H)
For simplicity, we denote AK := A(K)K and
AK(θ, φ, ψ) := A(K(θ, φ, ψ))K(θ, φ, ψ) = A(X(θ)Y (φ)Z(ψ)K)X(θ)Y (φ)Z(ψ)K.
For every K ∈ K, we define real numbers F,G,H by
F (K) := |O ∗ α(AK)| − |O ∗ a(AK)|,G(K) := |(AK)+++| + |(AK)−−+| − |(AK)−++| − |(AK)+−+|,H(K) := |(AK)+++| + |(AK)+−+| − |(AK)−++| − |(AK)−−+|,
and introduce the following functions on R3:
F (θ, φ, ψ) := F (AK(θ, φ, ψ)),
G(θ, φ, ψ) := G(AK(θ, φ, ψ)),
H(θ, φ, ψ) := H(AK(θ, φ, ψ)).
18

Mahler’s conjecture in the three dimensional case
If we can find a zero (θ, φ, ψ) of (F,G,H), then AK(θ, φ, ψ) satisfies the condition(10) by Proposition 4.2. To show the existence of such a zero, we consider thefollowing region in R
3:
D ={(θ, φ, ψ) ∈ R
3; 0 ≤ φ ≤ π, 0 ≤ ψ ≤ π, 0 ≤ θ ≤ π − Θ(0, φ, ψ)}.
Note that Θ is a smooth function introduced in the previous subsection and 0 <Θ(0, φ, ψ) < π. We divide the boundary ∂D into the following six parts:
M1 :={(0, φ, ψ) ∈ R
3; 0 ≤ φ ≤ π, 0 ≤ ψ ≤ π},
M2 :={(π − Θ(0, φ, ψ), φ, ψ) ∈ R
3; 0 ≤ φ ≤ π, 0 ≤ ψ ≤ π},
M3 :={(θ, 0, ψ) ∈ R
3; 0 ≤ ψ ≤ π, 0 ≤ θ ≤ π − Θ(0, 0, ψ)},
M4 :={(θ, π, ψ) ∈ R
3; 0 ≤ ψ ≤ π, 0 ≤ θ ≤ π − Θ(0, π, ψ)},
M5 :={(θ, φ, 0) ∈ R
3; 0 ≤ φ ≤ π, 0 ≤ θ ≤ π − Θ(0, φ, 0)},
M6 :={(θ, φ, π) ∈ R
3; 0 ≤ φ ≤ π, 0 ≤ θ ≤ π − Θ(0, φ, π)}.
Then, we have∂D = M1 ∪ · · · ∪M6
and Mi ∩Mj is empty or a curve for each i 6= j. In the case where (F,G,H) has nozeros on ∂D, we can use the degree of a map
F :=(F,G,H)√F 2 +G2 +H2
: ∂D → S2
to find a zero in the interior of D. In order to calculate the degree of F , in the restof this section, we show the identities (17), (18), and (19) in Proposition 4.13 below.
4.3 Some formulas
We prepare some formulas.
Lemma 4.3. For K ∈ K and ξ, η, ζ ∈ R,
ρ(X(ζ)K)(P (ξ, η)) = ρK(P (ξ, η − ζ)), ρK(P (ξ, η ± π)) = ρK(P (π − ξ, η)).
Proof. By the definition of µK , we have
µ(X(ζ)K)(P ) = min{t ≥ 0;P ∈ tX(ζ)K}= min{t ≥ 0;X(−ζ)P ∈ tK} = µK(X(−ζ)P ).
By the definition of ρK , we get
ρ(X(ζ)K)(P ) = ρK(X(−ζ)P ).
Moreover, for P = P (ξ, η) ∈ S2, X(−ζ)P (ξ, η) = P (ξ, η− ζ), which proves the firstequation.
Next, by a direct calculation, we have P (ξ, η ± π) = −P (π − ξ, η). Since K iscentrally symmetric, we obtain
ρK(P (ξ, η ± π)) = ρK(−P (π − ξ, η)) = ρK(P (π − ξ, η)).
19

Mahler’s conjecture in the three dimensional case
Lemma 4.4. Θ(K) + Θ(X(π − Θ(K))K) = π.
Proof. For η0, η1 ∈ R, by Lemma 4.3, we have
∫ η1
η0
dη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ
=∫ η1
η0
dη∫ π
0ρ3
(X(π−Θ(K))K)(P (ξ, η + π − Θ(K))) sin ξ dξ
=∫ η1+π−Θ(K)
η0+π−Θ(K)dη∫ π
0ρ3
(X(π−Θ(K))K)(P (ξ, η)) sin ξ dξ, (13)
where we used the substitution η = η + π − Θ(K). Applying (13) with (η0, η1) =(0,Θ(K)), (Θ(K), π) to the definition (12) of Θ(K), we obtain
∫ π
π−Θ(K)dη∫ π
0ρ3
(X(π−Θ(K))K)(P (ξ, η)) sin ξ dξ
=∫ 2π−Θ(K)
πdη∫ π
0ρ3
(X(π−Θ(K))K)(P (ξ, η)) sin ξ dξ
=∫ π−Θ(K)
0dη∫ π
0ρ3
(X(π−Θ(K))K)(P (ξ, η + π)) sin ξ dξ
=∫ π−Θ(K)
0dη∫ π
0ρ3
(X(π−Θ(K))K)(P (π − ξ, η)) sin ξ dξ
=∫ π−Θ(K)
0dη∫ π
0ρ3
(X(π−Θ(K))K)(P (ξ, η)) sin ξ dξ,
where we used Lemma 4.3 and the substitution ξ = π− ξ. Since π− Θ(K) ∈ (0, π),the uniqueness of Θ(X(π−Θ(K))K)) implies Θ(X(π−Θ(K))K)) = π−Θ(K) from(12).
4.4 Identities relating to the rotation X(π− Θ(K)) and X(π)
Here we examine the behavior of the functions F , G, and H under the rotation Xof K.
Lemma 4.5. Put L = X(π − Θ(K))K. Then
Θ(L) = π − Θ(K), Φ(L) = π − Ψ(K), Ψ(L) = Φ(K).
Proof. For simplicity, we put Θ = Θ(L), Θ = Θ(K), Φ = Φ(L), Φ = Φ(K),Ψ = Ψ(L), Ψ = Ψ(K). Note that Θ = π − Θ by Lemma 4.4, which means the firstformula.
By the definition of Φ, we have
∫ Φ
0ρ2L(P (ξ, 0)) dξ =
∫ π
Φρ2L(P (ξ, 0)) dξ.
By Lemma 4.3, we get
ρ2L(P (ξ, 0)) = ρ2
X(π−Θ)K(P (ξ, 0)) = ρ2K(P (ξ,Θ − π)) = ρ2
K(P (π − ξ,Θ))
20

Mahler’s conjecture in the three dimensional case
and ∫ Φ
0ρ2L(P (ξ, 0)) dξ =
∫ Φ
0ρ2K(P (π − ξ,Θ)) dξ =
∫ π
π−Φρ2K(P (ξ,Θ)) dξ,
where we used the substitution ξ = π − ξ. Similarly,
∫ π
Φρ2L(P (ξ, 0)) dξ =
∫ π
Φρ2K(P (π − ξ,Θ)) dξ =
∫ π−Φ
0ρ2K(P (ξ,Θ)) dξ.
Consequently, we have
∫ π
π−Φρ2K(P (ξ,Θ)) dξ =
∫ π−Φ
0ρ2K(P (ξ,Θ)) dξ.
By the uniqueness of Ψ = Ψ(K), we see Ψ = π − Φ.Similarly, by the definition of Ψ,
∫ Ψ
0ρ2L(P (ξ, Θ)) dξ =
∫ π
Ψρ2L(P (ξ, Θ)) dξ
holds. By Lemma 4.3, we have
ρ2L(P (ξ, Θ)) = ρ2
X(π−Θ)K(P (ξ, π − Θ)) = ρ2K(P (ξ, 0)).
Thus we get ∫ Ψ
0ρ2K(P (ξ, 0)) dξ =
∫ π
Ψρ2K(P (ξ, 0)) dξ.
By the uniqueness of Φ = Φ(K), we obtain Ψ = Φ.
Lemma 4.6.F (X(π − Θ(K))K) = −F (K),
G(X(π − Θ(K))K) = −H(K),
H(X(π − Θ(K))K) = G(K).
Proof. We use the same notations as in Lemma 4.5. Putting A = A(L), A = A(K),we have
AL = AX(π − Θ)K =(AX(π − Θ)A−1
)AK.
By a direct calculation using Lemma 4.5,
(AX(π − Θ)A−1)−1 = AX(Θ − π)A−1 =
1 0 00 0 1/ sin Θ0 − sin Θ 0
.
Thus, for any P = (x, y, z) ∈ R3, we have
χAL(P ) = χ(AX(π−Θ)A−1AK)(P )
= χAK((AX(π − Θ)A−1)−1P )
= χAK
1 0 00 0 1/ sin Θ0 − sin Θ 0
xyz
= χAK
xz/ sin Θ−y sin Θ
.
21

Mahler’s conjecture in the three dimensional case
By the substitution x = x, y = z/ sin Θ, z = −y sin Θ,
|(AL)+++| =∫
{x>0,y>0,z>0}χAL(P ) dxdydz
=∫
{x>0,y>0,z>0}χAK
xz/ sin Θ−y sin Θ
dxdydz
=∫
{x>0,y>0,z<0}χAK(P ) dxdydz = |(AK)++−| = |(AK)−−+|,
where the last equality comes from the fact that AK is centrally symmetric. Simi-larly, we obtain
|(AL)−++| =∫
{x<0,y>0,z>0}χAL(P ) dxdydz
=∫
{x<0,y>0,z<0}χAK(P ) dxdydz = |(AK)−+−| = |(AK)+−+|,
|(AL)−−+| =∫
{x<0,y<0,z>0}χAL(P ) dxdydz
=∫
{x<0,y>0,z>0}χAK(P ) dxdydz = |(AK)−++|,
|(AL)+−+| =∫
{x>0,y<0,z>0}χAL(P ) dxdydz
=∫
{x>0,y>0,z>0}χAK(P ) dxdydz = |(AK)+++|.
Since dydz = dydz, we also obtain
|O ∗ α(AL)| =∫
{x=0,y>0,z>0}χAL(P ) dydz
=∫
{x=0,y>0,z<0}χAK(P ) dydz = |O ∗ −a(AK)| = |O ∗ a(AK)|,
|O ∗ a(AL)| =∫
{x=0,y<0,z>0}χAL(P ) dydz
=∫
{x=0,y>0,z>0}χAK(P ) dydz = |O ∗ α(AK)|.
Therefore,
F (L) = |O ∗ α(AL)| − |O ∗ a(AL)|= |O ∗ a(AK)| − |O ∗ α(AK)| = −F (K),
G(L) = |(AL)+++| + |(AL)−−+| − |(AL)−++| − |(AL)+−+|= |(AK)−−+| + |(AK)−++| − |(AK)+−+| − |(AK)+++| = −H(K),
H(L) = |(AL)+++| + |(AL)+−+| − |(AL)−++| − |(AL)−−+|= |(AK)−−+| + |(AK)+++| − |(AK)+−+| − |(AK)−++| = G(K).
Using the above lemmas, we get identities relating to the rotation X(π).
22

Mahler’s conjecture in the three dimensional case
Lemma 4.7.
Θ(X(π)K) = Θ(K), Φ(X(π)K) = π − Φ(K), Ψ(X(π)K) = π − Ψ(K),
F (X(π)K) = F (K), G(X(π)K) = −G(K), H(X(π)K) = −H(K).
Proof. Put L = X(π− Θ(K))K. By Lemma 4.5, we have Θ(L) + Θ(K) = π. Thus,
X(π)K = X(2π − Θ(L) − Θ(K))K
= X(π − Θ(L))X(π − Θ(K))K
= X(π − Θ(L))L,
and so we can apply Lemmas 4.5 and 4.6 to X(π)K = X(π − Θ(L))L. By Lemma4.5, we have
Θ(X(π)K) = π − Θ(L) = π − (π − Θ(K)) = Θ(K),
Φ(X(π)K) = π − Ψ(L) = π − Φ(K),
Ψ(X(π)K) = Φ(L) = π − Ψ(K).
It follows from Lemma 4.6 that
F (X(π)K) = F (X(π − Θ(L))L) = −F (L) = F (K),
G(X(π)K) = G(X(π − Θ(L))L) = −H(L) = −G(K),
H(X(π)K) = H(X(π − Θ(L))L) = G(L) = −H(K).
4.5 Identities relating to the rotation Y (π)
Lemma 4.8. Put L = Y (π)K. Then
Θ(L) = π − Θ(K), Φ(L) = π − Φ(K), Ψ(L) = Ψ(K).
Proof. For simplicity, we put Θ = Θ(L), Θ = Θ(K), Φ = Φ(L), Φ = Φ(K),Ψ = Ψ(L), Ψ = Ψ(K). We first claim that
ρL(P (ξ, η)) = ρK(P (ξ, π − η)). (14)
Actually, Y (−π)P (ξ, η) = −P (ξ, π− η) holds by a direct calculation. Thus we have
ρL(P (ξ, η)) = ρY (π)K(P (ξ, η)) = ρK(Y (−π)P (ξ, η)) = ρK(−P (ξ, π − η)).
Since K is centrally symmetric, the claim (14) holds.By (14) and the definition of Θ,
∫ Θ
0dη∫ π
0ρ3K(P (ξ, π − η)) sin ξ dξ =
∫ π
Θdη∫ π
0ρ3K(P (ξ, π − η)) sin ξ dξ.
By the substitution η = π − η,
∫ π
π−Θdη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ =
∫ π−Θ
0dη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ
23

Mahler’s conjecture in the three dimensional case
By the definition and uniqueness of Θ, we get Θ = π − Θ. By the definition of Φ,
∫ Φ
0ρ2L(P (ξ, 0)) dξ =
∫ π
Φρ2L(P (ξ, 0)) dξ.
By Lemma 4.3, ρK(P (ξ, π−η)) = ρK(P (π−ξ,−η)) holds. It then follows from (14)that
∫ Φ
0ρ2L(P (ξ, 0)) dξ =
∫ Φ
0ρ2K(P (π − ξ, 0)) dξ =
∫ π
π−Φρ2K(P (ξ, 0)) dξ,
∫ π
Φρ2L(P (ξ, 0)) dξ =
∫ π
Φρ2K(P (π − ξ, 0)) dξ =
∫ π−Φ
0ρ2K(P (ξ, 0)) dξ,
where we used the substitution ξ = π − ξ. Therefore, by the definition of Φ,Φ = π − Φ. Similarly, by the definition of Ψ,
∫ Ψ
0ρ2L(P (ξ, Θ)) dξ =
∫ π
Ψρ2L(P (ξ, Θ)) dξ.
By (14) and Θ = π − Θ, we have ρ2L(P (ξ, Θ)) = ρ2
K(P (ξ, π − Θ)) = ρ2K(P (ξ,Θ)).
Thus ∫ Ψ
0ρ2K(P (ξ,Θ)) dξ =
∫ π
Ψρ2K(P (ξ,Θ)) dξ,
which means that Ψ = Ψ.
Lemma 4.9.
F (Y (π)K) = −F (K), G(Y (π)K) = −G(K), H(Y (π)K) = H(K).
Proof. We use the same notations as in Lemma 4.8. Putting A = A(L), A = A(K),we have
AL = AY (π)K = (AY (π)A−1)AK.Thus
χAL(P ) = χAK((AY (π)A−1)−1P ) = χAK(AY (−π)A−1P ).
By Lemma 4.8 and a direct calculation,
AY (−π)A−1 =
−1 0 00 1 00 0 −1
.
Thus, for any P = (x, y, z) ∈ R3, we have
|(AL)+++| =∫
{x>0,y>0,z>0}χAL(P ) dxdydz
=∫
{x>0,y>0,z>0}χAK
−1 0 00 1 00 0 −1
xyz
dxdydz
=∫
{x>0,y>0,z>0}χAK
−xy
−z
dxdydz
=∫
{x<0,y>0,z<0}χAK(P ) dxdydz = |(AK)−+−| = |(AK)+−+|,
24

Mahler’s conjecture in the three dimensional case
where we used the substitution x = −x, y = y, z = −z. Similarly, we have
|(AL)−++| =∫
{x<0,y>0,z>0}χAL(P ) dxdydz
=∫
{x>0,y>0,z<0}χAK(P ) dxdydz = |(AK)++−| = |(AK)−−+|,
|(AL)−−+| =∫
{x<0,y<0,z>0}χAL(P ) dxdydz
=∫
{x>0,y<0,z<0}χAK(P ) dxdydz = |(AK)+−−| = |(AK)−++|,
|(AL)+−+| =∫
{x>0,y<0,z>0}χAL(P ) dxdydz
=∫
{x<0,y<0,z<0}χAK(P ) dxdydz = |(AK)−−−| = |(AK)+++|.
Moreover, we get
|O ∗ α(AL)| =∫
{x=0,y>0,z>0}χAL(P ) dydz
=∫
{x=0,y>0,z<0}χAK(P ) dydz = |O ∗ −a(AK)| = |O ∗ a(AK)|,
|O ∗ a(AL)| =∫
{x=0,y<0,z>0}χAL(P ) dydz
=∫
{x=0,y<0,z<0}χAK(P ) dydz = |O ∗ −α(AK)| = |O ∗ α(AK)|.
Therefore,
F (L) = |O ∗ α(AL)| − |O ∗ a(AL)|= |O ∗ a(AK)| − |O ∗ α(AK)| = −F (K),
G(L) = |(AL)+++| + |(AL)−−+| − |(AL)−++| − |(AL)+−+|= |(AK)+−+| + |(AK)−++| − |(AK)−−+| − |(AK)+++| = −G(K),
H(L) = |(AL)+++| + |(AL)+−+| − |(AL)−++| − |(AL)−−+|= |(AK)+−+| + |(AK)+++| − |(AK)−−+| − |(AK)−++| = H(K).
4.6 Identities relating to the rotation Z(π)
Lemma 4.10. Put L = Z(π)K. Then
Θ(L) = π − Θ(K), Φ(L) = Φ(K), Ψ(L) = π − Ψ(K).
Proof. We put Θ = Θ(L), Θ = Θ(K), Φ = Φ(L), Φ = Φ(K), Ψ = Ψ(L), Ψ = Ψ(K).Since Z(−π)P (ξ, η) = P (π − ξ, π − η), we have
ρL(P (ξ, η)) = ρZ(π)K(P (ξ, η)) = ρK(Z(−π)P (ξ, η)) = ρK(P (π − ξ, π − η)).
It follows from Lemma 4.3 that
ρL(P (ξ, η)) = ρK(P (π − ξ, π − η)) = ρK(P (ξ,−η)). (15)
25

Mahler’s conjecture in the three dimensional case
By (15) and the definition of Θ, we have
∫ Θ
0dη∫ π
0ρ3K(P (π − ξ, π − η)) sin ξ dξ =
∫ π
Θdη∫ π
0ρ3K(P (π − ξ, π − η)) sin ξ dξ.
By the substitution ξ = π − ξ, η = π − η,
∫ π
π−Θdη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ =
∫ π−Θ
0dη∫ π
0ρ3K(P (ξ, η)) sin ξ dξ.
By the definition of Θ, we get Θ = π − Θ. Furthermore, we have
∫ Φ
0ρ2K(P (ξ, 0)) dξ =
∫ Φ
0ρ2L(P (ξ, 0)) dξ =
∫ π
Φρ2L(P (ξ, 0)) dξ =
∫ π
Φρ2K(P (ξ, 0)) dξ.
By the definition of Φ, we obtain Φ = Φ. Finally, the definition of Ψ means
∫ Ψ
0ρ2L(P (ξ, Θ)) dξ =
∫ π
Ψρ2L(P (ξ, Θ)) dξ.
By (15) and Θ = π − Θ, we obtain
ρ2L(P (ξ, Θ)) = ρ2
K(P (π − ξ, π − Θ)) = ρ2K(P (π − ξ,Θ)).
Thus
∫ Ψ
0ρ2L(P (ξ, Θ)) dξ =
∫ Ψ
0ρ2K(P (π − ξ,Θ)) dξ =
∫ π
π−Ψρ2K(P (ξ,Θ)) dξ,
∫ π
Ψρ2L(P (ξ, Θ)) dξ =
∫ π
Ψρ2K(P (π − ξ,Θ)) dξ =
∫ π−Ψ
0ρ2K(P (ξ,Θ)) dξ.
Therefore, π − Ψ = Ψ.
Lemma 4.11.
F (Z(π)K) = −F (K), G(Z(π)K) = G(K), H(Z(π)K) = −H(K).
Proof. We use the same notations as in Lemma 4.10. Putting A = A(L), A = A(K),we have
AL = AZ(π)K = (AZ(π)A−1)AK.Then
χAL(P ) = χAK((AZ(π)A−1)−1P ) = χAK(AZ(−π)A−1P ).
By Lemma 4.10 and a direct calculation,
AZ(−π)A−1 =
−1 0 00 −1 00 0 1
.
26

Mahler’s conjecture in the three dimensional case
Thus, for any P = (x, y, z) ∈ R3, we see
|(AL)+++| =∫
{x>0,y>0,z>0}χAL(P ) dxdydz
=∫
{x>0,y>0,z>0}χAK
−1 0 00 −1 00 0 1
xyz
dxdydz
=∫
{x>0,y>0,z>0}χAK
−x−yz
dxdydz
=∫
{x<0,y<0,z>0}χAK(P ) dxdydz = |(AK)−−+|,
where we used the substitution x = −x, y = −y, z = z. Similarly, we obtain
|(AL)−++| =∫
{x<0,y>0,z>0}χAL(P ) dxdydz
=∫
{x>0,y<0,z>0}χAK(P ) dxdydz = |(AK)+−+|,
|(AL)−−+| =∫
{x<0,y<0,z>0}χAL(P ) dxdydz
=∫
{x>0,y>0,z>0}χAK(P ) dxdydz = |(AK)+++|,
|(AL)+−+| =∫
{x>0,y<0,z>0}χAL(P ) dxdydz
=∫
{x<0,y>0,z>0}χAK(P ) dxdydz = |(AK)−++|.
Moreover, we have
|O ∗ α(AL)| =∫
{x=0,y>0,z>0}χAL(P ) dydz
=∫
{x=0,y<0,z>0}χAK(P ) dydz = |O ∗ a(AK)|,
|O ∗ a(AL)| =∫
{x=0,y<0,z>0}χAL(P ) dydz
=∫
{x=0,y>0,z>0}χAK(P ) dydz = |O ∗ α(AK)|
Therefore,
F (L) = |O ∗ α(AL)| − |O ∗ a(AL)|= |O ∗ a(AK)| − |O ∗ α(AK)| = −F (K),
G(L) = |(AL)+++| + |(AL)−−+| − |(AL)−++| − |(AL)+−+|= |(AK)−−+| + |(AK)+++| − |(AK)+−+| − |(AK)−++| = G(K),
H(L) = |(AL)+++| + |(AL)+−+| − |(AL)−++| − |(AL)−−+|= |(AK)−−+| + |(AK)−++| − |(AK)+−+| − |(AK)+++| = −H(K).
27

Mahler’s conjecture in the three dimensional case
4.7 Key identities on ∂D
By using the lemmas prepared in the above subsections, we show Proposition 4.13below, which states key identities on ∂D for the degree calculation in the nextsection. To begin with, we introduce the map Γ defined by
Γψ(θ) := π − Θ(θ, 0, ψ) + θ.
Lemma 4.12. Γ satisfies the following properties:
(i). θ 7→ Γψ(θ) is increasing.
(ii). Γψ ([0, π − Θ(0, 0, ψ)]) = [π − Θ(0, 0, ψ), π].
(iii). Γψ, (Γψ)−1 is smooth with respect to θ and ψ.
Proof. By Lemma 4.1, Γψ(θ) is smooth with respect to θ and ψ. We claim that
∂Γψ∂θ
(θ) = −∂Θ
∂θ(θ, 0, ψ) + 1 > 0. (16)
If the inequality (16) holds, then the properties (i), (ii), and (iii) are easily verified.Indeed, (i) follows immediately. Note that Γψ(0) = π − Θ(0, 0, ψ). By Lemma 4.4,we have
Γψ(π − Θ(0, 0, ψ)) = π − Θ(π − Θ(0, 0, ψ), 0, ψ) + π − Θ(0, 0, ψ)
= π − Θ(X(π − Θ(0, 0, ψ))K(0, 0, ψ)) + π − Θ(0, 0, ψ) = π,
which proves (ii), because Γψ is increasing by (i). Moreover, Γ−1ψ is smooth by the
implicit function theorem.Therefore, it suffices to prove (16). By the definition of Θ,
0 =∫ Θ(θ,0,ψ)
0dη∫ π
0ρ3K(θ,0,ψ)(P (ξ, η)) sin ξ dξ−
∫ π
Θ(θ,0,ψ)dη∫ π
0ρ3K(θ,0,ψ)(P (ξ, η)) sin ξ dξ.
By Lemma 4.3, we have
ρK(θ,0,ψ)(P (ξ, η)) = ρX(θ)K(0,0,ψ)(P (ξ, η)) = ρK(0,0,ψ)(P (ξ, η − θ)).
Thus, by the substitution η = η − θ, we obtain
0 =∫ Θ(θ,0,ψ)−θ
−θdη∫ π
0ρ3K(0,0,ψ)(P (ξ, η)) sin ξ dξ
−∫ π−θ
Θ(θ,0,ψ)−θdη∫ π
0ρ3K(0,0,ψ)(P (ξ, η)) sin ξ dξ.
By differentiating it with respect to θ,
0 = 2
(∂Θ
∂θ(θ, 0, ψ) − 1
)∫ π
0ρ3K(0,0,ψ)(P (ξ,Θ(θ, 0, ψ) − θ)) sin ξ dξ
+∫ π
0ρ3K(0,0,ψ)(P (ξ,−θ)) sin ξ dξ +
∫ π
0ρ3K(0,0,ψ)(P (ξ, π − θ)) sin ξ dξ,
which yields the inequality (16).
28

Mahler’s conjecture in the three dimensional case
Proposition 4.13. Between (0, φ, ψ) ∈ M1 and (π − Θ(0, φ, ψ), φ, ψ) ∈ M2, thefollowing formulas hold:
F (π − Θ(0, φ, ψ), φ, ψ) = −F (0, φ, ψ),
G(π − Θ(0, φ, ψ), φ, ψ) = −H(0, φ, ψ),
H(π − Θ(0, φ, ψ), φ, ψ) = G(0, φ, ψ).
(17)
Between (θ, 0, ψ) ∈ M3 and (θ, π, ψ) ∈ M4, the following formulas hold:
F (θ, π, ψ) = F (θ, 0, ψ),
G(θ, π, ψ) = −H(θ, 0, ψ),
H(θ, π, ψ) = −G(θ, 0, ψ),
(18)
where θ = (Γψ)−1(π − θ) ∈ [0, π − Θ(0, 0, ψ)]. Between (θ, π − φ, 0) ∈ M5 and(θ, φ, π) ∈ M6, the following formulas hold:
F (θ, φ, π) = −F (−θ,−φ, 0) = F (θ, π − φ, 0),
G(θ, φ, π) = G(−θ,−φ, 0) = −G(θ, π − φ, 0),
H(θ, φ, π) = −H(−θ,−φ, 0) = −H(θ, π − φ, 0).
(19)
Proof. First, we show (17). We have
K(π − Θ(θ, φ, ψ) + θ, φ, ψ) = X(π − Θ(θ, φ, ψ))X(θ)Y (φ)Z(ψ)K
= X(π − Θ(θ, φ, ψ))K(θ, φ, ψ).
Noting Θ(θ, φ, ψ) = Θ(K(θ, φ, ψ)), Lemma 4.6 implies
F (π − Θ(θ, φ, ψ) + θ, φ, ψ) = −F (θ, φ, ψ),
G(π − Θ(θ, φ, ψ) + θ, φ, ψ) = −H(θ, φ, ψ),
H(π − Θ(θ, φ, ψ) + θ, φ, ψ) = G(θ, φ, ψ).
(20)
Putting θ = 0, we get (17).Next, let us consider the case (θ, π, ψ) ∈ M4. Since X(θ)Y (π) = Y (π)X(−θ),
Y (φ)Z(π) = Z(π)Y (−φ), and X(θ)Z(π) = Z(π)X(−θ), we have
K(θ, π, ψ) = X(θ)Y (π)Z(ψ)K = Y (π)X(−θ)Y (0)Z(ψ)K = Y (π)K(−θ, 0, ψ).
By Lemma 4.9, we have
F (θ, π, ψ) = −F (−θ, 0, ψ), G(θ, π, ψ) = −G(−θ, 0, ψ), H(θ, π, ψ) = H(−θ, 0, ψ).
Since F,G,H are 2π-periodic with respect to θ, we use Lemma 4.7 to obtain
−F (−θ, 0, ψ) = −F (π + π − θ, 0, ψ) = −F (π − θ, 0, ψ),
−G(−θ, 0, ψ) = −G(π + π − θ, 0, ψ) = G(π − θ, 0, ψ),
H(−θ, 0, ψ) = H(π + π − θ, 0, ψ) = −H(π − θ, 0, ψ).
29

Mahler’s conjecture in the three dimensional case
Here, by the definition of M4, 0 ≤ θ ≤ π − Θ(0, π, ψ) holds, and hence Θ(0, π, ψ) ≤π − θ ≤ π. On the other hand, by Lemma 4.8, we have
Θ(0, π, ψ) = π − Θ(0, 0, ψ). (21)
Thus π − Θ(0, 0, ψ) ≤ π − θ ≤ π. For each π − θ ∈ [π − Θ(0, 0, ψ), π], puttingθ = (Γψ)−1(π − θ) ∈ [0, π − Θ(0, 0, ψ)] (see Lemma 4.12), by using (20), we get
−F (π − θ, 0, ψ) = −F (Γψ(θ), 0, ψ) = −F (π − Θ(θ, 0, ψ) + θ, 0, ψ) = F (θ, 0, ψ),
G(π − θ, 0, ψ) = G(Γψ(θ), 0, ψ) = G(π − Θ(θ, 0, ψ) + θ, 0, ψ) = −H(θ, 0, ψ),
−H(π − θ, 0, ψ) = −H(Γψ(θ), 0, ψ) = −H(π − Θ(θ, 0, ψ) + θ, 0, ψ) = −G(θ, 0, ψ),
which imply (18).Finally, we consider the case (θ, φ, π) ∈ M6. Note that
K(θ, φ, π) = X(θ)Y (φ)Z(π)K = X(θ)Z(π)Y (−φ)K
= Z(π)X(−θ)Y (−φ)Z(0)K = Z(π)K(−θ,−φ, 0),
K(−θ,−φ, 0) = X(−θ)Y (2π − φ)Z(0)K = Y (π)X(θ)Y (π − φ)Z(0)K
= Y (π)K(θ, π − φ, 0).
Thus, by Lemmas 4.11 and 4.9, we obtain
F (θ, φ, π) = −F (−θ,−φ, 0) = F (θ, π − φ, 0),
G(θ, φ, π) = G(−θ,−φ, 0) = −G(θ, π − φ, 0),
H(θ, φ, π) = −H(−θ,−φ, 0) = −H(θ, π − φ, 0).
Since K(0, φ, π) = Z(π)Y (π)K(0, π − φ, 0), by the definition of Θ, we have
Θ(0, φ, π) = Θ(0, π − φ, 0). (22)
It means that (θ, φ, π) ∈ M6 (θ ∈ [0, π− Θ(0, φ, π)]) if and only if (θ, π− φ, 0) ∈ M5
(θ ∈ [0, π − Θ(0, π − φ, 0)]). Hence (19) is verified.
5 Calculation of degree
5.1 Setting
We use new coordinates (s, φ, ψ) instead of (θ, φ, ψ), where
s =θ
π − Θ(0, φ, ψ).
For the new coordinates (s, φ, ψ), we see that
M1 = {0} × [0, π] × [0, π], M3 = [0, 1] × {0} × [0, π], M5 = [0, 1] × [0, π] × {0},M2 = {1} × [0, π] × [0, π], M4 = [0, 1] × {π} × [0, π], M6 = [0, 1] × [0, π] × {π}.
30

Mahler’s conjecture in the three dimensional case
We defineF (s, φ, ψ) := F ((π − Θ(0, φ, ψ))s, φ, ψ),
G(s, φ, ψ) := G((π − Θ(0, φ, ψ))s, φ, ψ),
H(s, φ, ψ) := H((π − Θ(0, φ, ψ))s, φ, ψ).
Note thatD =
{(s, φ, ψ) ∈ R
3; 0 ≤ s ≤ 1, 0 ≤ φ ≤ π, 0 ≤ ψ ≤ π}
and (F , G, H) ∈ C∞(D,R3).Then (F , G, H)|∂D is a triplet of continuous functions on ∂D = M1 ∪ · · · ∪ M6,
of class C∞ in the interior of each Mi for i = 1, . . . , 6. Hence, (F , G, H)|∂D can beregarded as a piecewise smooth vector field on ∂D. It follows from Proposition 4.13,(21), and (22) that (F , G, H) satisfies the identities:
F (1, φ, ψ) = −F (0, φ, ψ),
G(1, φ, ψ) = −H(0, φ, ψ),
H(1, φ, ψ) = G(0, φ, ψ)
(23)
for φ, ψ ∈ [0, π] and
F (s, π, ψ) = F (Tψ(s), 0, ψ),
G(s, π, ψ) = −H(Tψ(s), 0, ψ),
H(s, π, ψ) = −G(Tψ(s), 0, ψ)
(24)
for s ∈ [0, 1], ψ ∈ [0, π] and
F (s, φ, π) = F (s, π − φ, 0),
G(s, φ, π) = −G(s, π − φ, 0),
H(s, φ, π) = −H(s, π − φ, 0)
(25)
for s ∈ [0, 1], φ ∈ [0, π], where Tψ : [0, 1] → [0, 1] is defined by
Tψ(s) :=Γ−1ψ (π − Θ(0, 0, ψ)s)
π − Θ(0, 0, ψ).
By Lemma 4.12, Tψ(s) is smooth with respect to ψ and s, decreasing with respectto s, Tψ(0) = 1, and Tψ(1) = 0.
As we mentioned in Section 4.2, if we can find a zero (θ, φ, ψ) in D of the vectorfield (F,G,H), then the equations (10) in Section 3.4 are satisfied and the proof of3-dimensional symmetric Mahler conjecture is completed. In Sections 5.3 and 5.4,we consider the case that (F,G,H) has no zeros on the boundary ∂D. Now, assumethat (F,G,H) 6= 0 on ∂D, that is, (F , G, H) 6= 0 on ∂D. Then we shall calculatethe degree of
F :=(F , G, H)√F 2 + G2 + H2
: ∂D → S2.
31

Mahler’s conjecture in the three dimensional case
5.2 Degree of a map
The degree of a map is one of the basic tools to find a zero of a vector field. Herewe briefly review the necessary facts about the degree of maps (see e.g., [OR]).
Let M,N be connected oriented smooth manifolds of dimension n. For a smoothmap f : M → N , the integer
∑
x∈f−1(a)
sgn det(df)x (26)
does not depend on the choice of the regular value a ∈ N , which is called theBrouwer-Kronecker degree of f and denoted by deg(f). Since deg(f) has the prop-erty of the homotopy invariance, the notion can be defined for continuous maps.Note that since deg(f) can be described in terms of integration of differential forms[OR, Corollary 2.4], we can also use it when M is piecewise smooth and f : M → Nis continuous and smooth on the smooth part of M as long as f−1(a) is containedin the smooth part of M . In our setting, M = ∂D ⊂ R
3 and f = F : ∂D → S2 iscontinuous, and smooth on the interior of Mi (i = 1, . . . , 6).
Another notion of degree we will need below is the Euclidean degree. Let D0 ⊂Rm+1 be a bounded open set. Let g : D0 ∪ ∂D0 → R
m+1 be a smooth map. Ifa ∈ R
m+1 \ g(∂D0) is a regular value of g|D0, then g−1(a) is a finite set and
d(g,D0, a) :=∑
x∈g−1(a)
sgn det
(∂gi∂xj
(x)
)(27)
is called the Euclidean degree of f . This is constant for all regular values containedin the same connected component of Rm+1 \ g(∂D0).
In our setting, the key idea for proving that deg(F ) 6= 0 is to reduce the calcu-lation to the case of the Euclidean degree of g = (G, H) : M1 → R
2 (see Proposition5.2). And the latter is reduced to the calculation of the winding number of it (seeProposition 5.3).
5.3 Reduction
For notational convenience, in Sections 5.3, 5.4, and Appendix A, we denote theabove F , G, and H by F , G, and H , respectively, and consider
F =(F,G,H)√F 2 +G2 +H2
: ∂D → S2.
In order to calculate deg F by using (26), we first need to modify the map F
so as to satisfy the property that (±1, 0, 0) are its regular values.
Proposition 5.1. There exists a map F : ∂D → S2 ⊂ R3 satisfying the following
properties (i)–(iv):
(i). F is homotopic to F . Especially, deg F = deg F holds.
(ii). F (∂Mi) 6∋ (±1, 0, 0) for i = 1, . . . , 6.
32

Mahler’s conjecture in the three dimensional case
(iii). (±1, 0, 0) are regular values of F .
(iv). F satisfies (23), (24), and (25).
We give a proof of Proposition 5.1 in Appendix A. Owing to Proposition 5.1, inwhat follows we may assume that
F (∂Mi) 6∋ (±1, 0, 0) for i = 1, . . . , 6, (28)
and (±1, 0, 0) are regular values of F . Note that F (s, φ, ψ) = (±1, 0, 0) if and onlyif G(s, φ, ψ) = H(s, φ, ψ) = 0 and sgnF (s, φ, ψ) = ±1. Hence, the inverse image of(±1, 0, 0) by F |M1
corresponds to the zeros of the vector field (G,H) on M1. Bythe condition (28), (G,H) 6= (0, 0) on ∂M1 and the map
G :=(G,H)√G2 +H2
: ∂M1 → S1
is well-defined.
Proposition 5.2. For the above maps F : ∂D → S2 and G : ∂M1 → S1 ⊂ R2, we
havedeg F = w(G , (0, 0)) (mod 2),
where w(G , (0, 0)) is the winding number.
Proof. Since (1, 0, 0) is a regular value of F , by (26) we have
deg F =∑
P∈F−1(1,0,0)
sgn det (dF )P .
Since the inverse image F −1(1, 0, 0) is a finite set, we find out the parity of deg F
by counting the elements. For each i = 1, . . . , 6, denote by ki the cardinality ofF −1(1, 0, 0) ∩ intMi, that is
ki := # {(s, φ, ψ) ∈ intMi; F (s, φ, ψ) = (1, 0, 0)} . (29)
Similarly k− denotes the cardinality of F −1(−1, 0, 0) ∩ intM1, that is
k− := # {(s, φ, ψ) ∈ intM1; F (s, φ, ψ) = (−1, 0, 0)} . (30)
By (28), we have deg F = k1 + · · · + k6 (mod 2).If P ∈ F −1(1, 0, 0) ∩M4, that is P = (s, π, ψ) ∈ F −1(1, 0, 0) for some s ∈ [0, 1]
and ψ ∈ [0, π], then for P = (Tψ(s), 0, ψ) ∈ M3 we have P ∈ F −1(1, 0, 0) by (24).Since (s, π, ψ) 7→ (Tψ(s), 0, ψ) is a C∞-diffeomorphism from intM4 to intM3, we seek4 ≤ k3. Using the same argument for P ∈ M3 ∩ F −1(1, 0, 0), we obtain k3 ≤ k4,and hence k3 = k4. Similarly, using the correspondence between M5 and M6 by (25),we get k5 = k6. Furthermore, by (23) the set F −1(1, 0, 0) ∩M2 exactly correspondsto F −1(−1, 0, 0) ∩M1, which yields k2 = k−. Consequently, we obtain
k1 + · · · + k6 = k1 + k− + 2(k3 + k5)
33

Mahler’s conjecture in the three dimensional case
anddeg F = k1 + k− (mod 2).
By (29) and (30), k1 + k− can be viewed as the number of zeros of the vector field(G,H) on M1. Note that P ∈ intM1 is a regular point of (G,H) with (G,H)(P ) =(0, 0) if and only if P ∈ intM1 is a regular point of F with F (P ) = (±1, 0, 0).Since (G,H) 6= (0, 0) on ∂M1, (0, 0) is a regular value of (G,H) because (±1, 0, 0)are regular values of F . Thus, by (27) we have
d((G,H), intM1, (0, 0)) =∑
(G,H)(P )=(0,0)
sgn det(d(G,H))P = k1 + k− (mod 2).
Moreover, it is known that
d((G,H), intM1, (0, 0)) = w((G,H), (0, 0)),
where the right-hand side is the winding number of (G,H) : ∂M1 → R2 \ {(0, 0)}
around (0, 0). Since (G,H) : ∂M1 → R2 \ {(0, 0)} is homotopic to
G =(G,H)√G2 +H2
: ∂M1 → S1 ⊂ R2 \ {(0, 0)},
we have w((G,H), (0, 0)) = w(G , (0, 0)), which completes the proof.
5.4 Calculation of w(G , (0, 0))
Proposition 5.2 reduces the problem to the following
Proposition 5.3. w(G , (0, 0)) is odd.
Proof. To calculate the winding number, we represent each point Pt on ∂M1 as
Pt =
(0, t, 0) if 0 ≤ t ≤ π,
(0, π, t− π) if π ≤ t ≤ 2π,
(0, 3π − t, π) if 2π ≤ t ≤ 3π,
(0, 0, 4π − t) if 3π ≤ t ≤ 4π,
which parametrizes ∂M1. Put
G (Pt) = (G(Pt), H(Pt)) :=(G(Pt), H(Pt))√G2(Pt) +H2(Pt)
= (cos s, sin s).
Then s is a piecewise smooth function of t. We have
w(G , (0, 0)) =1
2π
∫ 4π
0W (t) dt,
where W (t) := G(Pt)H′(Pt) − G′(Pt)H(Pt). First, by (23) and (24), we have
G(0, π, ψ) = −H(1, 0, ψ) = −G(0, 0, ψ),
H(0, π, ψ) = −G(1, 0, ψ) = H(0, 0, ψ),
(G2 +H2)(0, π, ψ) = (G2 +H2)(0, 0, ψ).
34

Mahler’s conjecture in the three dimensional case
ThusG(0, π, ψ) = −G(0, 0, ψ), H(0, π, ψ) = H(0, 0, ψ),
which yield that, for 3π ≤ t ≤ 4π,
G(Pt) = G(0, 0, 4π − t) = −G(0, π, 4π − t),
H(Pt) = H(0, 0, 4π − t) = H(0, π, 4π − t).
So, we obtain
∫ 4π
3πW (t) dt
=∫ 4π
3πG(0, π, 4π − t)Hψ(0, π, 4π − t) − Gψ(0, π, 4π − t)H(0, π, 4π − t) dt
= −∫ π
2πG(0, π, τ − π)Hψ(0, π, τ − π) − Gψ(0, π, τ − π)H(0, π, τ − π) dτ,
where we used the substitution 4π − t = τ − π. On the other hand, for π ≤ t ≤ 2π,we have G(t) = G(0, π, t− π), H(t) = H(0, π, t− π). So, we obtain
∫ 2π
πW (t) dt
=∫ 2π
πG(0, π, t− π)Hψ(0, π, t− π) − Gψ(0, π, t− π)H(0, π, t− π) dt.
Hence ∫ 4π
3πW (t) dt =
∫ 2π
πW (t) dt.
Next, by (25), we have
G(0, φ, π) = −G(0, π − φ, 0),
H(0, φ, π) = −H(0, π − φ, 0),
(G2 +H2)(0, φ, π) = (G2 +H2)(0, π − φ, 0).
ThusG(0, φ, π) = −G(0, π − φ, 0), H(0, φ, π) = −H(0, π − φ, 0), (31)
which yield that, for 2π ≤ t ≤ 3π,
G(Pt) = G(0, 3π − t, π) = −G(0, t− 2π, 0),
H(Pt) = H(0, 3π − t, π) = −H(0, t− 2π, 0).
Therefore,
∫ 3π
2πW (t) dt
=∫ 3π
2πG(0, t− 2π, 0)Hφ(0, t− 2π, 0) − Gφ(0, t− 2π, 0)H(0, t− 2π, 0) dt
=∫ π
0G(0, τ, 0)Hφ(0, τ, 0) − Gφ(0, τ, 0)H(0, τ, 0) dτ,
35

Mahler’s conjecture in the three dimensional case
where we used the substitution τ = t − 2π. On the other hand, for 0 ≤ t ≤ π,G(Pt) = G(0, t, 0), H(Pt) = H(0, t, 0). Thus,
∫ π
0W (t) dt =
∫ π
0G(0, t, 0)Hφ(0, t, 0) − Gφ(0, t, 0)H(0, t, 0) dt.
Hence, ∫ 3π
2πW (t) dt =
∫ π
0W (t) dt.
Consequently, we get ∫ 4π
0W (t) dt = 2
∫ 2π
0W (t) dt.
Since G(Pt) = cos s, H(Pt) = sin s, and W (t) = dsdt
, we have
2∫ 2π
0W (t) dt = 2
∫ s1
s0
ds = 2(s1 − s0),
where s0 and s1 are determined by(
cos s0
sin s0
)=
(G(P0)H(P0)
),
(cos s1
sin s1
)=
(G(P2π)H(P2π)
),
respectively. By (31), we see
(G(P2π)H(P2π)
)=
(G(0, π, π)H(0, π, π)
)= −
(G(0, 0, 0)H(0, 0, 0)
)= −
(G(P0)H(P0)
).
This means that there exists m ∈ Z such that s1 = s0 + (2m+ 1)π. Hence
∫ 4π
0W (t) dt = 2(2m+ 1)π,
which yields w(G , (0, 0)) = 2m+ 1.
5.5 Proof of the main theorem (inequality part)
Let us prove the inequality part of Theorem 1.1. A convex body K ∈ K30 can be
approximated by an element of K as follows (see e.g., [Mi, pp. 38], [Sc2, pp. 438]).
Proposition 5.4. For any centrally symmetric convex body K ∈ K30 and any ε > 0,
there exists a convex body L ∈ K3 with the following properties:
(a) δ(K,L) < ε,
(b) L has C∞ support function and is strongly convex,
(c) L is also centrally symmetric,
where δ denotes the Hausdorff distance on K3. In particular, L ∈ K.
Since the volume is continuous with respect to the Hausdorff distance, it sufficesto show the inequality (2) for K ∈ K. Fix K ∈ K. We show the following
36

Mahler’s conjecture in the three dimensional case
Claim. (F , G, H) has a zero on D.
Proof. In the case where (F , G, H) has a zero on ∂D, the claim trivially holds. Ifnot,
F =(F , G, H)√F 2 + G2 + H2
: ∂D → S2
is well-defined and deg F is odd by Propositions 5.2 and 5.3. By, for example,[OR, pp. 157–158, Propositions 4.4 and 4.6], (F , G, H) has a zero in D.
We denote the zero of (F , G, H) by (s0, φ0, ψ0). Putting θ0 = (π−Θ(0, φ0, ψ0))s0,it means that (F,G,H) = (0, 0, 0) at (θ0, φ0, ψ0). Thus the convex body
AK(θ0, φ0, ψ0) = A(X(θ0)Y (φ0)Z(ψ0)K)X(θ0)Y (φ0)Z(ψ0)K
satisfies the key equality (10). Since A(X(θ0)Y (φ0)Z(ψ0)K)X(θ0)Y (φ0)Z(ψ0) is alinear transformation, by Proposition 3.3 we obtain
P(K) = P (AK(θ0, φ0, ψ0)) ≥ 32
3.
Consequently, every K ∈ K satisfies (2). Thus we complete the proof of the Mahlerconjecture for any centrally symmetric convex body K ∈ K3
0.
6 The equality case
In this section, we show the equality part of Theorem 1.1. That is,
Theorem 6.1. Let K be a centrally symmetric convex body in R3 with P(K) = 32/3.
Then, K or K◦ is a parallelepiped.
6.1 Dual face
Let K ∈ Kn0 be a centrally symmetric convex polytope in R
n. Then K◦ is also acentrally symmetric convex polytope. For a face F of K, its dual face F ◦ ⊂ K◦ isdefined by
F ◦ := {Q ∈ K◦;P ·Q = 1 for any P ∈ F} .For a k-dimensional face F , the dimension of F ◦ is n− k − 1.
Assume K ∈ K20 is a polygon. If a face F ⊂ K is a line segment which contains
two points (a, b) and (c, d), then its dual face F ◦ is a vertex of K◦. Putting F ◦ ={(α, β)}, by the definition of F ◦, we obtain that
(a bc d
)(αβ
)=
(11
).
Hence, (αβ
)=
(a bc d
)−1 (11
)=
1
ad− bc
(d− ba− c
).
37

Mahler’s conjecture in the three dimensional case
Assume K ∈ K30 is a polytope. If a 2-dimensional face F of K contains three
points (xi, yi, zi) (i = 1, 2, 3) which do not on the same straight line, then its dualface F ◦ is a vertex of K◦. Putting F ◦ = {(u, v, w)}, we similarly obtain
x1 y1 z1
x2 y2 z2
x3 y3 z3
uvw
=
111
.
Hence, uvw
=
x1 y1 z1
x2 y2 z2
x3 y3 z3
−1
111
.
6.2 Inequality
For a general convex body K, we need the inequality similarly as Proposition 3.2.Let Ai (i = 1, 2, 3) be points with A1 · (A2 ×A3) > 0, and consider Ci,j = CK(Ai, Aj)for (i, j) = (1, 2), (2, 3), (3, 1).
Lemma 6.2. Assume K ∈ K30. Let SK(C1,2 ∪C2,3 ∪C3,1) be a triangle on ∂K. For
any P ∈ K, we have
1
3
(P · C1,2 + P · C2,3 + P · C3,1
)≤ |O ∗ SK(C1,2 ∪ C2,3 ∪ C3,1)|, (32)
where Ci,j = (Ci,j,1, Ci,j,2, Ci,j,3) and Ci,j,k = sgn((Ai ×Aj)k)|O ∗ Pk(Ci,j)|.
Proof. Since (32) depends on K continuously, by the Hausdorff approximation, wemay assume K ∈ K. By Proposition 3.2, it is sufficient to show that
∫
C1,2
(P × r) · dr = 2P · C1,2. (33)
The curve C1,2 is parametrized by l(t) := ρK((1 − t)A1 + tA2)((1 − t)A1 + tA2)(t ∈ [0, 1]). By a direct calculation,
l(t) × l′(t)
= ρK((1 − t)A1 + tA2)((1 − t)A+ tA2)
× ((∇ρK((1 − t)A1 + tA2) · (A2 − A1)) ((1 − t)A1 + tA2) + ρK((1 − t)A1 + tA2)(A2 − A1))
= ρ2K((1 − t)A1 + tA2)(A1 ×A2).
Thus, we have
∫
C1,2
(P × r) · dr = P ·∫ 1
0(l(t) × l′(t)) dt = P · (A1 × A2)
∫ 1
0ρ2K((1 − t)A1 + tA2) dt
Since the absolute value of(∫ 1
0 l × l′ dt)k
is equal to 2|O ∗ Pk(C1,2)| and ρK((1 −t)A1 + tA2) > 0, we obtain (33).
38

Mahler’s conjecture in the three dimensional case
6.3 Linear transformation of K ∈ K30
To prove Theorem 6.1, for a general centrally symmetric convex body K, we needto find a transformation A such that AK satisfies (10).
Proposition 6.3. Let K ∈ K30 be a convex body which satisfies P(K) = 32/3.
Then there exists a linear transformation B ∈ GL(3) such that L = BK satisfiesP(L) = 32/3, the condition (10), and ±(1, 0, 0),±(0, 1, 0),±(0, 0, 1) ∈ ∂L.
Proof. Fix K ∈ K30. By Proposition 5.4, there exists (Km)∞
m=1 ⊂ K such thatKm → K as m → ∞. By the results in Sections 4 and 5, for each m ∈ N, thereexists a linear transformation Bm = A(Km(θm, φm, ψm))X(θm)Y (φm)Z(ψm) suchthat BmKm satisfies the condition (10). Hence,
|(BmKm)±±±| =|BmKm|
8,
α(BmKm) = a(BmKm), β(BmKm) = b(BmKm), γ(BmKm) = c(BmKm).(34)
Note that (θm)∞m=1, (φm)∞
m=1, (ψm)∞m=1 ⊂ [0, π] are bounded sequences.
Claim. (A(Km))∞m=1 and (A(Km)−1)∞
m=1 are bounded sequences.
Proof. By the definition of A in Section 4.1, it is sufficient to show that
(1
tan Θm
)∞
m=1
,(
1
tan Φm
)∞
m=1
,(
1
sin Θm tan Ψm
)∞
m=1
are bounded, where Θm = Θ(θm, φm, ψm), Φm = Φ(θm, φm, ψm), Ψm = Ψ(θm, φm, ψm).For simplicity, we put Km := Km(θm, φm, ψm). Since (Km)∞
m=1 converges to K,there exists r > 1 independent of m such that
B(
0,1
r
)⊂ Km ⊂ B(0, r),
where B(0, r) is the open ball with center 0 and radius r. Since each Km is theimage of Km by a rotation, the same inequality holds for Km. Hence,
1
r≤ ρKm(P ) ≤ r if P ∈ S2 ⊂ R
3.
Thus, by the definition (12) of Θ, we have
2Θm1
r3≤ 2(π − Θm)r3, 2Θmr
3 ≥ 2(π − Θm)1
r3.
Hence,1/r3
r3 + 1/r3π ≤ Θm ≤ r3
r3 + 1/r3π.
Since
0 <1/r3
r3 + 1/r3<
r3
r3 + 1/r3< 1,
39

Mahler’s conjecture in the three dimensional case
we obtain that (1/ tan Θm)∞m=1 and (1/ sin Θm)∞
m=1 are bounded. Similarly, by thedefinitions of Φ and Ψ, we have
1/r2
r2 + 1/r2π ≤ Φm ≤ r2
r2 + 1/r2π,
1/r2
r2 + 1/r2π ≤ Ψm ≤ r2
r2 + 1/r2π.
Hence, the claim holds.
Thus, taking subsequence if necessary, there exists a linear transformation B ∈GL(3) such that limm→∞Bm = B in GL(3), and limm→∞BmKm = BK in theHausdorff distance. Thus limm→∞ ρBmKm
= ρBK uniformly in S2 ⊂ R3. Since
(BmKm)+++ and α(BmKm), etc. are expressed by the integral of ρBmKmon closed
subsets on S2, taking as m → ∞ in (34), we obtain that
|(BK)±±±| =|BK|
8,
α(BK) = a(BK), β(BK) = b(BK), γ(BK) = c(BK).
Moreover, since each BmKm satisfies (10), we obtain
9
4|BmKm||(BmKm)◦|
≥ |Q1(BmKm)| |P1((BmKm)◦)|+ |Q2(BmKm)| |P2((BmKm)◦)| + |Q3(BmKm)| |P3((BmKm)◦)|
as in Section 3.4. Since limm→∞(BmKm)◦ = (BK)◦ in the Hausdorff distance,
9
4P(BK) =
9
4|BK||(BK)◦|
≥ |Q1(BK)| |P1((BK)◦)| + |Q2(BK)| |P2((BK)◦)| + |Q3(BK)| |P3((BK)◦)|
holds. By Theorem 2.1, |Qi(BK)| |Pi((BK)◦)| ≥ 8 (i = 1, 2, 3). Since P(BK) =P(K) = 32/3, we obtain |Qi(BK)| |Pi((BK)◦)| = 8 (i = 1, 2, 3). If necessary, wechoose a diagonal matrix C to satisfy that ±(1, 0, 0),±(0, 1, 0),±(0, 0, 1) ∈ ∂(CBK).Then, B = CB satisfies the required conditions.
6.4 The equality case
Proposition 6.4. Let L ∈ K30 with P(L) = 32/3. Assume that L satisfies the
condition (10), ±(1, 0, 0),±(0, 1, 0),±(0, 0, 1) ∈ ∂L, and |Qi(L)||Pi(L◦)| = 8 (i =1, 2, 3). Then, L or L◦ is a parallelepiped.
Proof. For each i = 1, 2, 3, we have (Qi(L))◦ = Pi(L◦) and |Qi(L)||Pi(L◦)| = 8.
Moreover, (10) holds. Thus, we can apply Proposition 2.2 to each Qi(L). As a
40

Mahler’s conjecture in the three dimensional case
result, there exist α, β, γ ∈ (−1, 1] such that
Q1(L) = conv{ ±1
1 + α2(0, 1 − α, 1 + α),
±1
1 + α2(0,−1 − α, 1 − α)
},
P1(L◦) = conv {±(0, 1, α),±(0,−α, 1)} ,
Q2(L) = conv
{±1
1 + β2(1 + β, 0, 1 − β),
±1
1 + β2(1 − β, 0,−1 − β)
},
P2(L◦) = conv {±(β, 0, 1),±(1, 0,−β)} ,
Q3(L) = conv
{±1
1 + γ2(1 − γ, 1 + γ, 0),
±1
1 + γ2(−1 − γ, 1 − γ, 0)
},
P3(L◦) = conv {±(1, γ, 0),±(−γ, 1, 0)} .
(35)
Hence,
|Q1(L)| =4
1 + α2, |Q2(L)| =
4
1 + β2, |Q3(L)| =
4
1 + γ2.
Then
|L+++∩{x = 0}| =1
1 + α2, |L+++∩{y = 0}| =
1
1 + β2, |L+++∩{z = 0}| =
1
1 + γ2.
It follows from Lemma 6.2 that
|L|8
= |L+++| ≥ 1
3
(1
1 + α2,
1
1 + β2,
1
1 + γ2
)· (x, y, z) (36)
for any (x, y, z) ∈ L. Hence, (8/3|L|)(1/(1 + α2), 1/(1 + β2), 1/(1 + γ2)) ∈ L◦ holds.Similarly, we obtain that
8
3|L|
(±1
1 + α2,
±1
1 + β2,
±1
1 + γ2
)∈ L◦. (37)
On the other hand, since (±1, 0, 0), (0,±1, 0), (0, 0,±1) ∈ L,
(±1, 0, 0) · (u, v, w) = ±u ≤ 1,
(0,±1, 0) · (u, v, w) = ±v ≤ 1,
(0, 0,±1) · (u, v, w) = ±w ≤ 1
hold for any (u, v, w) ∈ L◦. Hence,
L◦ ⊂ [−1, 1] × [−1, 1] × [−1, 1]. (38)
Now we determine the shapes of L and L◦. Without loss of generalities, it sufficesto consider the following four cases: (i) α, β, γ ∈ (−1, 1), (ii) α, β ∈ (−1, 1), γ = 1,(iii) α = β = 1, γ ∈ (−1, 1), (iv) α = β = γ = 1.
41

Mahler’s conjecture in the three dimensional case
Case (i) α, β, γ ∈ (−1, 1); By the assumption (0, 0, 1) ∈ ∂L, we have L◦ ∩ {w =1} 6= ∅. By (35),
P1(L◦ ∩ {w = 1}) = P1(L
◦) ∩ {w = 1} = {(0,−α, 1)},P2(L
◦ ∩ {w = 1}) = P2(L◦) ∩ {w = 1} = {(β, 0, 1)}
hold. Thus, L◦ ∩ {w = 1} = {(β,−α, 1)}. Similarly, we have
L◦ ∩ {u = ±1} = {±(1, γ,−β)},L◦ ∩ {v = ±1} = {±(−γ, 1, α)},L◦ ∩ {w = ±1} = {±(β,−α, 1)}. (39)
By (38), we obtain
A◦± := ±(1, γ,−β), B◦
± := ±(−γ, 1, α), C◦± := ±(β,−α, 1) ∈ ∂L◦. (40)
Note that the points in (40) are mutually distinct, because α, β, γ ∈ (−1, 1). More-over, these six points are in different faces of the cube [−1, 1]3. We use these pointsto divide L◦.
The line segment connecting from A◦+ to B◦
+ is on ∂L◦. Indeed, if Q = τA◦+ +
(1 − τ)B◦+ is an interior point of L◦ for some τ ∈ (0, 1), then there exists a open
ball B(Q, ǫ) with the center Q and radius ǫ > 0 such that B(Q, ǫ) ⊂ L◦. ThusP3(B(Q, ǫ)) ⊂ P3(L
◦), and P3(Q) is an interior point of P3(L◦). On the other hand,
by (35), the line segment connecting from (1, γ, 0) to (−γ, 1, 0) is a part of ∂P3(L◦).It is a contradiction. Therefore, CL(A◦
+, B◦+) is the line segment connecting from A◦
+
to B◦+. Similarly, we see that the segments connecting C◦
+, A◦+, B◦
+ cyclically is atriangle on ∂L◦, because (C◦
+ × A◦+) · B◦
+ = 1 + α2 + β2 + γ2 > 0. We denote thetriangle by T (C◦
+, A◦+, B
◦+). Put
L◦+++ :=O ∗ T (C◦
+, A◦+, B
◦+), L◦
−++ :=O ∗ T (C◦+, B
◦+, A
◦−),
L◦−−+ :=O ∗ T (C◦
+, A◦−, B
◦−), L◦
+−+ :=O ∗ T (C◦+, B
◦−, A
◦+).
Then, by the symmetry of L◦, we have |L◦| = 2(|L◦+++|+ |L◦
−++|+ |L◦−−+|+ |L◦
+−+|).Applying Lemma 6.2 to L◦
+++, we have
|L◦+++| ≥ 1
6
∣∣∣∣∣∣∣
u v wβ −α 11 γ −β
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v w1 γ −β
−γ 1 α
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v w−γ 1 αβ −α 1
∣∣∣∣∣∣∣
=1
6
1 + α2 + αβ + αγ + β − γ1 + β2 + αβ + βγ + γ − α1 + γ2 + αγ + βγ + α − β
⊤
· (u, v, w)
42

Mahler’s conjecture in the three dimensional case
for any (u, v, w) ∈ L◦. Similarly, we obtain
|L◦−++| ≥ 1
6
∣∣∣∣∣∣∣
u v wβ −α 1
−γ 1 α
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v w−γ 1 α−1 −γ β
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v w−1 −γ ββ −α 1
∣∣∣∣∣∣∣
=1
6
−1 − α2 + αβ + αγ + β − γ1 + β2 − αβ + βγ − γ − α1 + γ2 − αγ + βγ + α + β
⊤
· (u, v, w),
|L◦−−+| ≥ 1
6
∣∣∣∣∣∣∣
u v wβ −α 1
−1 −γ β
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v w−1 −γ βγ −1 −α
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v wγ −1 −αβ −α 1
∣∣∣∣∣∣∣
=1
6
−1 − α2 − αβ + αγ + β + γ−1 − β2 − αβ + βγ − γ − α1 + γ2 − αγ − βγ − α + β
⊤
· (u, v, w),
|L◦+−+| ≥ 1
6
∣∣∣∣∣∣∣
u v wβ −α 1γ −1 −α
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v wγ −1 −α1 γ −β
∣∣∣∣∣∣∣+
1
6
∣∣∣∣∣∣∣
u v w1 γ −ββ −α 1
∣∣∣∣∣∣∣
=1
6
1 + α2 − αβ + αγ + β + γ−1 − β2 + αβ + βγ + γ − α1 + γ2 + αγ − βγ − α− β
⊤
· (u, v, w)
for any (u, v, w) ∈ L◦. Therefore, the four points
S+++ :=1
6|L◦+++|
1 + α2 + αβ + αγ + β − γ1 + β2 + αβ + βγ + γ − α1 + γ2 + αγ + βγ + α − β
⊤
,
S−++ :=1
6|L◦−++|
−1 − α2 + αβ + αγ + β − γ1 + β2 − αβ + βγ − γ − α1 + γ2 − αγ + βγ + α + β
⊤
,
S−−+ :=1
6|L◦−−+|
−1 − α2 − αβ + αγ + β + γ−1 − β2 − αβ + βγ − γ − α1 + γ2 − αγ − βγ − α+ β
⊤
,
S+−+ :=1
6|L◦+−+|
1 + α2 − αβ + αγ + β + γ−1 − β2 + αβ + βγ + γ − α1 + γ2 + αγ − βγ − α − β
⊤
are contained in L. Combining the fact that S+++ ∈ L with (36), we have
|L+++| ≥ 1
18|L◦+++|
(3 +
αβ + αγ + β − γ
1 + α2+αβ + βγ + γ − α
1 + β2+αγ + βγ + α − β
1 + γ2
).
(41)
43

Mahler’s conjecture in the three dimensional case
Similarly, we obtain
|L−++|
≥ 1
18|L◦−++|
(3 − αβ + αγ + β − γ
1 + α2+
−αβ + βγ − γ − α
1 + β2+
−αγ + βγ + α+ β
1 + γ2
),
|L−−+|
≥ 1
18|L◦−−+|
(3 − −αβ + αγ + β + γ
1 + α2− −αβ + βγ − γ − α
1 + β2+
−αγ − βγ − α + β
1 + γ2
),
|L+−+|
≥ 1
18|L◦+−+|
(3 +
−αβ + αγ + β + γ
1 + α2− αβ + βγ + γ − α
1 + β2+αγ − βγ − α − β
1 + γ2
).
Thus,
|L+++||L◦+++| + |L−++||L◦
−++| + |L−−+||L◦−−+| + |L+−+||L◦
+−+| ≥ 12
18=
2
3.
On the other hand, since the assumption (10) for L means |L±±±| = |L|/8, we have
|L+++||L◦+++| + · · · + |L+−+||L◦
+−+| =|L|8
(|L◦
+++| + |L◦−++| + |L◦
−−+| + |L◦+−+|
)
=|L||L◦|
16=
32
3
1
16=
2
3.
Thus, the above inequality holds with equality. Hence (41) holds with equality.That is, (36) for S+++ holds with equality. Taking the proof of Proposition 3.2 intoaccount, we have
S+++ ∈ {(x, y, z); x ≥ 0, y ≥ 0, z ≥ 0},L+++ = conv {L+++ ∩ {x = 0}, L+++ ∩ {y = 0}, L+++ ∩ {z = 0}, S+++} .
Hence S+++ ∈ ∂L. We put S+++ = (s1, s2, s3) for simplicity.Now, we consider the case S+++ 6∈ {x = 0}. Then
conv
{(0, 1 − α, 1 + α)
1 + α2,(0,−1 − α, 1 − α)
1 + α2, S+++
}
is a part of a face of L. Its dual face is a vertex of L◦. Then the dual face is
0 (1 − α)/(1 + α2) (1 + α)/(1 + α2)0 −(1 + α)/(1 + α2) (1 − α)/(1 + α2)s1 s2 s3
−1
111
=
−s3+αs2+1s1
−α1
.
Comparing it with (39), we obtain
(−s3 + αs2 + 1
s1,−α, 1
)= C◦
+.
44

Mahler’s conjecture in the three dimensional case
Hence −s3 + αs2 + 1 = βs1. Then,
6|L◦+++| = 6|L◦
+++|(βs1 − αs2 + s3)
= β(1 + α2 + αβ + αγ + β − γ) − α(1 + β2 + αβ + βγ + γ − α)
+ 1 + γ2 + αγ + βγ + α − β
= 1 + α2 + β2 + γ2. (42)
On the other hand, the volume of conv{O,A◦
+, B◦+, C
◦+
}⊂ L◦
+++ is
1
6
∣∣∣∣∣∣∣
1 γ −β−γ 1 αβ −α 1
∣∣∣∣∣∣∣=
1
6(1 + α2 + β2 + γ2).
Hence,L◦
+++ = conv{O,A◦
+, B◦+, C
◦+
}. (43)
Next, we consider the case S+++ ∈ {x = 0}. Since S+++ ∈ ∂L, we obtainS+++ ∈ ∂Q1(L). Since S+++ is in the first octant, S+++ is on the line segmentconnecting from (0, 1−α, 1+α)/(1+α2) to (0, 0, 1), or on the line segment connectingfrom (0, 1, 0) to (0, 1 − α, 1 + α)/(1 + α2). For the former case, we have
S+++ · C◦+ = (1 − τ)
(0, 1 − α, 1 + α)
1 + α2· C◦
+ + τ(0, 0, 1) · C◦+ = 1,
which yields βs1 −αs2 +s3 = 1, and 6|L◦+++| = 1+α2 +β2 +γ2 holds as (42). Thus,
we obtain (43) as well. For the latter case, we have
S+++ · B◦+ = (1 − τ)(0, 1, 0) · B◦
+ + τ(0, 1 − α, 1 + α)
1 + α2· B◦
+ = 1.
Since s1 = 0, we obtain s2 + αs3 = 1. Thus
6|L◦+++| = 6|L◦
+++|(s2 + αs3)
= 1 + β2 + αβ + βγ + γ − α + α(1 + γ2 + αγ + βγ + α − β)
= 1 + α2 + β2 + γ2 + γ(1 + α2 + αβ + αγ + β − γ)
= 1 + α2 + β2 + γ2 + 6γ|L◦+++|s1
= 1 + α2 + β2 + γ2,
which yields (43) as well.By repeating the above arguments for L◦
−++, L◦−−+, L
◦+−+, we obtain
L◦ = conv{±A◦
+,±B◦+,±C◦
+
}.
Thus, L◦ is a centrally symmetric octahedron. Then,
L = conv {±S+++,±S−++,±S−−+,±S+−+}
is a parallelepiped.
45

Mahler’s conjecture in the three dimensional case
Case (ii) α, β ∈ (−1, 1), γ = 1; By (35), we have
Q3(L) = conv {±(1, 0, 0),±(0, 1, 0)} , P3(L◦) = [−1, 1] × [−1, 1] × {0}.
Thus, we obtain
P3(L◦ ∩ {u = 1}) = P3(L
◦) ∩ {u = 1} = {1} × [−1, 1] × {0}.
Hence, for any v ∈ [−1, 1], there exists w(v) ∈ [−1, 1] such that (1, v, w(v)) ∈ L◦
and(1, v, w(v)) ∈ L◦ ∩ {u = 1}.
On the other hand, combining (35) with β ∈ (−1, 1), we have
P2(L◦ ∩ {u = 1}) = {(1, 0,−β)}.
Consequently, we obtain w(v) = −β (v ∈ [−1, 1]) and
{1} × [−1, 1] × {−β} ⊂ L◦. (44)
Especially, we have (1,−1,−β), (1, 1,−β) ∈ L◦. Combining (35) with α ∈ (−1, 1),
P1((1, 1,−β)) = (0, 1,−β) ∈ P1(L◦) ∩ {v = 1} = {(0, 1, α)},
P1((1,−1,−β)) = (0,−1,−β) ∈ P1(L◦) ∩ {v = −1} = {(0,−1,−α)}.
Hence −β = α = −α. Thus, α = β = 0. Especially, by (44), we obtain
{1} × [−1, 1] × {0} ⊂ L◦.
By the symmetry and convexity of L◦, we obtain
[−1, 1] × [−1, 1] × {0} ⊂ L◦.
Since α = β = 0, similarly as the above,
P1(L◦ ∩ {w = 1}) = P1(L◦) ∩ {w = 1} = {(0, 0, 1)},
P2(L◦ ∩ {w = 1}) = P2(L◦) ∩ {w = 1} = {(0, 0, 1)},
which implies that (0, 0, 1) ∈ L◦. In summary,
conv {[−1, 1] × [−1, 1] × {0},±(0, 0, 1)} ⊂ L◦. (45)
Now, since α = β = 0, by (37), we have
8
3|L|(
1, 1,1
2
)∈ L◦.
Since
P2
(8
3|L|(
1, 1,1
2
))=
8
3|L|(
1, 0,1
2
)∈ P2(L
◦) = conv{±(1, 0, 0),±(0, 0, 1)},
46

Mahler’s conjecture in the three dimensional case
we obtain8
3|L|(
1 +1
2
)=
4
|L| ≤ 1.
Since P(L) = 32/3, we have
|L◦| =32
3|L| ≤ 8
3. (46)
On the other hand, by (45),
|L◦| ≥ |conv {[−1, 1] × [−1, 1] × {0},±(0, 0, 1)}| =8
3
holds. Therefore, |L◦| = 8/3 and
L◦ = conv {[−1, 1] × [−1, 1] × {0},±(0, 0, 1)} .
Hence, L◦ is a centrally symmetric octahedron and
L = conv {(±1, 0,±1), (0,±1,±1)}
is a parallelepiped.
Case (iii) α = β = 1, γ ∈ (−1, 1); By (35), we have
P1(L◦) = {0} × [−1, 1] × [−1, 1], P2(L◦) = [−1, 1] × {0} × [−1, 1],
P3(L◦) = conv {±(1, γ, 0),±(−γ, 1, 0)} .
Since γ ∈ (−1, 1), we see
P2(L◦ ∩ {u = 1}) = {1} × {0} × [−1, 1],
P3(L◦ ∩ {u = 1}) = {(1, γ, 0)}.
Hence{1} × {γ} × [−1, 1] ⊂ L◦.
By the symmetry of L◦, we obtain
{−1} × {−γ} × [−1, 1] ⊂ L◦.
Similarly,P1(L
◦ ∩ {v = 1}) = {0} × {1} × [−1, 1],
P3(L◦ ∩ {v = 1}) = {(−γ, 1, 0)}.
Thus{−γ} × {1} × [−1, 1] ⊂ L◦.
By the symmetry of L◦, we get
{γ} × {−1} × [−1, 1] ⊂ L◦.
By the convexity of L◦,
conv {±(1, γ, 1),±(−γ, 1, 1),±(1, γ,−1),±(−γ, 1,−1)} ⊂ L◦.
47

Mahler’s conjecture in the three dimensional case
On the other hand, we have L◦ ⊂ [−1, 1] × [−1, 1] × [−1, 1] by (38). Combining itwith P3(L
◦) = conv {±(1, γ, 0),±(−γ, 1, 0)}, we obtain
L◦ ⊂ conv {±(1, γ, 1),±(−γ, 1, 1),±(1, γ,−1),±(−γ, 1,−1)} .
Thus,L◦ = conv {±(1, γ, 1),±(−γ, 1, 1),±(1, γ,−1),±(−γ, 1,−1)}
is a parallelepiped.
Case (iv) α = β = γ = 1; By (35), we have
Q1(L) = conv {±(0, 1, 0),±(0, 0, 1)} , P1(L◦) = {0} × [−1, 1] × [−1, 1],
Q2(L) = conv {±(1, 0, 0),±(0, 0, 1)} , P2(L◦) = [−1, 1] × {0} × [−1, 1],
Q3(L) = conv {±(1, 0, 0),±(0, 1, 0)} , P3(L◦) = [−1, 1] × [−1, 1] × {0}.
Recall that L◦ ⊂ [−1, 1] × [−1, 1] × [−1, 1]. If (1, 1, 1) ∈ L◦, then we have
(1, 1, 1) · (x, y, z) = x+ y + z ≤ 1
for any (x, y, z) ∈ L. On the other hand, (1, 0, 0), (0, 1, 0), (0, 0, 1) ∈ L. By thedefinition of L+++, we obtain
L+++ = conv {(1, 0, 0), (0, 1, 0), (0, 0, 1)} .
Moreover, since
|L−++| =|L|8
= |L+++| =1
6,
(−1, 0, 0), (0, 1, 0), (0, 0, 1) ∈ L, and the definition of L−++, we have
L−++ = conv {(−1, 0, 0), (0, 1, 0), (0, 0, 1)} .
By similar arguments for L−−+ and L+−+, we obtain
L = conv {±(1, 0, 0),±(0, 1, 0),±(0, 0, 1)} .
ThusL◦ = [−1, 1] × [−1, 1] × [−1, 1]
is a parallelepiped. Similarly, if one of the eight points (±1,±1,±1) is in L◦, thenL is an octahedron and L◦ is a parallelepiped.
Thus, from now on we may assume that (±1,±1,±1) 6∈ L◦. Using the charac-terization of Qi(L) (i = 1, 2, 3), by Lemma 6.2, we have
|L|8
= |L+++| ≥ 1
6(1, 1, 1) · (x, y, z)
for any (x, y, z) ∈ L. Similar arguments about the other seven parts imply
4
3|L|(±1,±1,±1) ∈ L◦.
48

Mahler’s conjecture in the three dimensional case
Next, by the characterization of Pi(L◦) (i = 1, 2, 3), there exists ai, bi, ci ∈ (−1, 1)
(i = 1, 2) such that
A◦1 := (a1, 1, 1), A◦
2 := (a2,−1, 1), B◦1 := (1, b1, 1), B◦
2 := (1, b2,−1),
C◦1 := (1, 1, c1), C◦
2 := (−1, 1, c2)
are in L◦. We consider three planes HOA◦
1A◦
2, HOB◦
1B◦
2, and HOC◦
1C◦
2determined by
O,A◦1, A
◦2; O,B
◦1, B
◦2 ; and O,C◦
1 , C◦2 , respectively. We divide L◦ by these planes into
8 pieces L◦±±±. By the convexity of L◦, each line segment connecting any two points
in {±A◦1,±A◦
2,±B◦1 ,±B◦
2 ,±C◦1 ,±C◦
2 } is in L◦. Thus HOA◦
1A◦
2, HOB◦
1B◦
2, and HOC◦
1C◦
2
contain conv {±A◦1,±A◦
2}, conv {±B◦1 ,±B◦
2}, and conv {±C◦1 ,±C◦
2 }, respectively.We put
D◦ = (1, d2, d3) := B◦1B
◦2 ∩ C◦
1 (−C◦2 ),
E◦ = (e1, 1, e3) := C◦1C
◦2 ∩A◦
1(−A◦2),
F ◦ = (f1, f2, 1) := A◦1A
◦2 ∩B◦
1(−B◦2).
Then D◦, E◦, and F ◦ are in L◦. Applying Lemma 6.2 to L◦ with C1,2 = CL◦(F ◦, D◦),C2,3 = CL◦(D◦, E◦), C3,1 = CL◦(E◦, F ◦), and P = 4(1, 1, 1)/3|L| ∈ L◦, we have
|L◦+++| ≥ 2
9|L|
∣∣∣∣∣∣∣
1 1 1f1 f2 11 b1 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 1 11 b1 11 d2 d3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 1 11 d2 d3
1 1 c1
∣∣∣∣∣∣∣
+2
9|L|
∣∣∣∣∣∣∣
1 1 11 1 c1
e1 1 e3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 1 1e1 1 e3
a1 1 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 1 1a1 1 1f1 f2 1
∣∣∣∣∣∣∣
=2
9|L|(6 − 2a1 − 2b1 − 2c1 − d2 − d3 − e1 − e3 − f1 − f2
+ c1d2 + b1d3 + c1e1 + a1e3 + b1f1 + a1f2).
(47)
Similarly, we obtain that
|L◦−++| ≥ 2
9|L|
∣∣∣∣∣∣∣
−1 1 1f1 f2 1a1 1 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 1 1a1 1 1e1 1 e3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 1 1e1 1 e3
−1 1 c2
∣∣∣∣∣∣∣
+2
9|L|
∣∣∣∣∣∣∣
−1 1 1−1 1 c2
−1 −d2 −d3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 1 1−1 −d2 −d3
−1 −b2 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 1 1−1 −b2 1f1 f2 1
∣∣∣∣∣∣∣
=2
9|L|(6 + 2a1 + 2b2 − 2c2 + d2 + d3 + e1 − e3 + f1 − f2
+ b2d3 − a1e3 + b2f1 − a1f2 − c2d2 − c2e1),
49

Mahler’s conjecture in the three dimensional case
|L◦−−+| ≥ 2
9|L|
∣∣∣∣∣∣∣
−1 −1 1f1 f2 1−1 −b2 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 −1 1−1 −b2 1−1 −d2 −d3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 −1 1−1 −d2 −d3
−1 −1 −c1
∣∣∣∣∣∣∣
+2
9|L|
∣∣∣∣∣∣∣
−1 −1 1−1 −1 −c1
−e1 −1 −e3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 −1 1−e1 −1 −e3
a2 −1 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
−1 −1 1a2 −1 1f1 f2 1
∣∣∣∣∣∣∣
=2
9|L|(6 + 2a2 − 2b2 + 2c1 − d2 + d3 − e1 + e3 + f1 + f2
− b2d3 + a2e3 − b2f1 + a2f2 − c1d2 − c1e1),
|L◦+−+| ≥ 2
9|L|
∣∣∣∣∣∣∣
1 −1 1f1 f2 1a2 −1 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 −1 1a2 −1 1
−e1 −1 −e3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 −1 1−e1 −1 −e3
1 −1 −c2
∣∣∣∣∣∣∣
+2
9|L|
∣∣∣∣∣∣∣
1 −1 11 −1 −c2
1 d2 d3
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 −1 11 d2 d3
1 b1 1
∣∣∣∣∣∣∣+
2
9|L|
∣∣∣∣∣∣∣
1 −1 11 b1 1f1 f2 1
∣∣∣∣∣∣∣
=2
9|L|(6 − 2a2 + 2b1 + 2c2 + d2 − d3 + e1 + e3 − f1 + f2
− b1d3 − a2e3 − b1f1 − a2f2 + c2d2 + c2e1).
Taking these sums, we obtain
|L◦|2
= |L◦+++| + |L◦
−++| + |L◦−−+| + |L◦
+−+| ≥ 16
3|L| .
On the other hand, by the assumption, |L||L◦| = 32/3. Thus (47) holds withequality. Especially, L◦
+++ is the cone with the vertex 4(1, 1, 1)/3|L| over O ∗(F ◦B◦
1D◦C◦
1E◦A◦
1F◦). It is not convex if 4/3|L| < 1. Thus 4/3|L| ≥ 1. It means that
(1, 1, 1) ∈ L◦, which is a contradiction. Consequently, in the case α = β = γ = 1,(±1,±1,±1) 6∈ L◦ does not occur, and L◦ = [−1, 1] × [−1, 1] × [−1, 1]. Hence L◦ isa parallelepiped.
Proof of Theorem 6.1. Combining Proposition 6.3 and Proposition 6.4, the conclu-sion follows immediately.
A Proof of Proposition 5.1
To prove Proposition 5.1, we have to modify the map F defined on ∂D. We consider∂D as a hexahedron, and deform F near each vertices of ∂D and deform near eachedges of ∂D. We introduce some auxiliary functions satisfy (23), (24), and (25). Wefirst check that G2 +H2 has same value at vertices.
Lemma A.1. (G2 +H2) takes same value at eight vertices on ∂D; (0, 0, 0), (0, π, 0),(0, π, π), (0, 0, π), (1, 0, 0), (1, π, 0), (1, π, π), (1, 0, π).
Remark A.2. More generally, if a vector field (0, G, H) satisfies (23), (24), and(25), then G2 + H2 takes same value at the eight vertices.
50

Mahler’s conjecture in the three dimensional case
Proof of Lemma A.1. By (23), we have
(G2 +H2)(1, 0, 0) = (G2 +H2)(0, 0, 0),
(G2 +H2)(1, π, 0) = (G2 +H2)(0, π, 0),
(G2 +H2)(1, π, π) = (G2 +H2)(0, π, π),
(G2 +H2)(1, 0, π) = (G2 +H2)(0, 0, π).
By (24), we also obtain
(G2 +H2)(0, π, 0) = (G2 +H2)(1, 0, 0),
(G2 +H2)(0, π, π) = (G2 +H2)(1, 0, π).
By (25),(G2 +H2)(0, 0, π) = (G2 +H2)(0, π, 0).
Thus we see the conclusion.
To modify the vector field (F,G,H) on D ⊂ R3, we introduce a cut-off function
ζ(s, φ, ψ). Let ζ : D → R be a smooth function such that, radially symmetric withrespect to the origin, 0 ≤ ζ ≤ 1, ζ(0, 0, 0) = 1, and supp ζ is a small neighborhoodof the origin. We put
G0(s, φ, ψ) := ζ(s, φ, ψ) − ζ(s, π − φ, ψ)
− ζ(s, π − φ, π − ψ) + ζ(s, φ, π − ψ),
H0(s, φ, ψ) := ζ(T−1ψ (s), φ, ψ) − ζ(Tψ(s), π − φ, ψ)
− ζ(Tψ(s), π − φ, π − ψ) + ζ(T−1ψ (s), φ, π − ψ).
Lemma A.3. (0, G0, H0) satisfies (23), (24), and (25).
Proof. Since supp ζ is a small neighborhood of the origin (0, 0, 0), we see ζ(1, φ, ψ) =ζ(s, π, ψ) = ζ(s, φ, π) = 0. Combining them with the formulas of Lemma A.5 below,we can check that (0, G0, H0) satisfies (23), (24), and (25) directly as follows:
G0(0, φ, ψ) = ζ(0, φ, ψ) − ζ(0, π − φ, ψ)
− ζ(0, π − φ, π − ψ) + ζ(0, φ, π − ψ),
H0(0, φ, ψ) = ζ(T−1ψ (0), φ, ψ) − ζ(Tψ(0), π − φ, ψ)
− ζ(Tψ(0), π − φ, π − ψ) + ζ(T−1ψ (0), φ, π − ψ)
= 0,
G0(1, φ, ψ) = ζ(1, φ, ψ) − ζ(1, π − φ, ψ)
− ζ(1, π − φ, π − ψ) + ζ(1, φ, π − ψ)
= 0,
H0(1, φ, ψ) = ζ(T−1ψ (1), φ, ψ) − ζ(Tψ(1), π − φ, ψ)
− ζ(Tψ(1), π − φ, π − ψ) + ζ(T−1ψ (1), φ, π − ψ)
= ζ(0, φ, ψ) − ζ(0, π − φ, ψ)
− ζ(0, π − φ, π − ψ) + ζ(0, φ, π − ψ),
51

Mahler’s conjecture in the three dimensional case
G0(Tψ(s), 0, ψ) = ζ(Tψ(s), 0, ψ) − ζ(Tψ(s), π − 0, ψ)
− ζ(Tψ(s), π − 0, π − ψ) + ζ(Tψ(s), 0, π − ψ)
= ζ(Tψ(s), 0, ψ) + ζ(Tψ(s), 0, π − ψ),
H0(Tψ(s), 0, ψ) = ζ(T−1ψ (Tψ(s)), 0, ψ) − ζ(Tψ(Tψ(s)), π − 0, ψ)
− ζ(Tψ(Tψ(s)), π − 0, π − ψ) + ζ(T−1ψ (Tψ(s)), 0, π − ψ)
= ζ(s, 0, ψ) + ζ(s, 0, π − ψ),
G0(s, π, ψ) = ζ(s, π, ψ) − ζ(s, π − π, ψ)
− ζ(s, π − π, π − ψ) + ζ(s, π, π − ψ)
= −ζ(s, 0, ψ) − ζ(s, 0, π − ψ),
H0(s, π, ψ) = ζ(T−1ψ (s), π, ψ) − ζ(Tψ(s), π − π, ψ)
− ζ(Tψ(s), π − π, π − ψ) + ζ(T−1ψ (s), π, π − ψ)
= −ζ(Tψ(s), 0, ψ) − ζ(Tψ(s), 0, π − ψ),
G0(s, π − φ, 0) = ζ(s, π − φ, 0) − ζ(s, π − (π − φ), 0)
− ζ(s, π − (π − φ), π − 0) + ζ(s, π − φ, π − 0)
= ζ(s, π − φ, 0) − ζ(s, φ, 0),
H0(s, π − φ, 0) = ζ(T−10 (s), π − φ, 0) − ζ(T0(s), π − (π − φ), 0)
− ζ(T0(s), π − (π − φ), π − 0) + ζ(T−10 (s), π − φ, π − 0)
= ζ(T−10 (s), π − φ, 0) − ζ(T0(s), φ, 0),
G0(s, φ, π) = ζ(s, φ, π) − ζ(s, π − φ, π)
− ζ(s, π − φ, π − π) + ζ(s, φ, π − π)
= −ζ(s, π − φ, 0) + ζ(s, φ, 0),
H0(s, φ, π) = ζ(T−1π (s), φ, π) − ζ(Tπ(s), π − φ, π)
− ζ(Tπ(s), π − φ, π − π) + ζ(T−1π (s), φ, π − π)
= −ζ(Tπ(s), π − φ, 0) + ζ(T−1π (s), φ, 0).
Fix ǫ > 0. We also introduce cut-off functions ζ1(s, φ, ψ), ζ2(s, φ, ψ), andζ3(s, φ, ψ) such that
ζ1 = 1 on [ǫ, 1 − ǫ] × {0} × {0},ζ2 = 1 on {0} × [ǫ, π − ǫ] × {0},ζ3 = 1 on {0} × {0} × [ǫ, π − ǫ],
each supp ζi (i = 1, 2, 3) is contained in ǫ/2-neighborhood of [ǫ, 1 − ǫ] × {0} × {0},{0}×[ǫ, π−ǫ]×{0}, and {0}×{0}×[ǫ, π−ǫ] respectively, and 0 ≤ ζi ≤ 1 (i = 1, 2, 3).
52

Mahler’s conjecture in the three dimensional case
We put
(G1
H1
)(s, φ, ψ) :=
(α1
β1
)ζ1(s, φ, ψ) +
(−β1
−α1
)ζ1(Tψ(s), π − φ, ψ)
+
(β1
α1
)ζ1(T
−1ψ (s), φ, π − ψ) +
(−α1
−β1
)ζ1(s, π − φ, π − ψ),
(G2
H2
)(s, φ, ψ) :=
(α2
β2
)ζ2(s, φ, ψ) +
(−α2
−β2
)ζ2(s, π − φ, π − ψ)
+
(−β2
α2
)ζ2(T
−1ψ (s), φ, ψ) +
(β2
−α2
)ζ2(Tψ(s), π − φ, π − ψ),
(G3
H3
)(s, φ, ψ) :=
(α3
β3
)ζ3(s, φ, ψ) +
(−β3
−α3
)ζ3(Tψ(s), π − φ, ψ)
+
(−α3
β3
)ζ3(s, π − φ, ψ) +
(−β3
α3
)ζ3(T
−1ψ (s), φ, ψ),
where we choose the ǫ sufficiently small with 0 < ǫ < 1/2, and αi, βi (i = 1, 2, 3)are positive real numbers. Then, we can assume that suppGi ∩ suppGj = ∅ andsuppHi ∩ suppHj = ∅ for i 6= j.
Lemma A.4. For each i = 1, 2, 3, the vector field (0, Gi, Hi) on D satisfies (23),(24), and (25).
Proof. By the definition of ζi, we have
ζi(1, ·, ·) = ζi(·, π, ·) = ζi(·, ·, π) = 0 (i = 1, 2, 3),
ζ1(0, ·, ·) = ζ2(·, 0, ·) = ζ3(·, ·, 0) = 0.
Combining them with the formulas of Lemma A.5 below, we can check that (0, G1, H1)satisfies (23), (24), and (25) directly as follows:
(G1
H1
)(0, φ, ψ) =
(α1
β1
)ζ1(0, φ, ψ) +
(−β1
−α1
)ζ1(Tψ(0), π − φ, ψ)
+
(β1
α1
)ζ1(T
−1ψ (0), φ, π − ψ) +
(−α1
−β1
)ζ1(0, π − φ, π − ψ) =
(00
),
(G1
H1
)(1, φ, ψ) =
(α1
β1
)ζ1(1, φ, ψ) +
(−β1
−α1
)ζ1(Tψ(1), π − φ, ψ)
+
(β1
α1
)ζ1(T
−1ψ (1), φ, π − ψ) +
(−α1
−β1
)ζ1(1, π − φ, π − ψ) =
(00
),
(G1
H1
)(Tψ(s), 0, ψ) =
(α1
β1
)ζ1(Tψ(s), 0, ψ) +
(−β1
−α1
)ζ1(Tψ(Tψ(s)), π, ψ)
+
(β1
α1
)ζ1(T
−1ψ (Tψ(s)), 0, π − ψ) +
(−α1
−β1
)ζ1(Tψ(s), π, π − ψ)
=
(α1
β1
)ζ1(Tψ(s), 0, ψ) +
(β1
α1
)ζ1(s, 0, π − ψ),
53

Mahler’s conjecture in the three dimensional case
(G1
H1
)(s, π, ψ) =
(α1
β1
)ζ1(s, π, ψ) +
(−β1
−α1
)ζ1(Tψ(s), 0, ψ)
+
(β1
α1
)ζ1(T
−1ψ (s), π, π − ψ) +
(−α1
−β1
)ζ1(s, 0, π − ψ)
=
(−β1
−α1
)ζ1(Tψ(s), 0, ψ) +
(−α1
−β1
)ζ1(s, 0, π − ψ),
(G1
H1
)(s, π − φ, 0) =
(α1
β1
)ζ1(s, π − φ, 0) +
(−β1
−α1
)ζ1(T0(s), φ, 0)
+
(β1
α1
)ζ1(T
−10 (s), π − φ, π) +
(−α1
−β1
)ζ1(s, φ, π)
=
(α1
β1
)ζ1(s, π − φ, 0) +
(−β1
−α1
)ζ1(T0(s), φ, 0),
(G1
H1
)(s, φ, π) =
(α1
β1
)ζ1(s, φ, π) +
(−β1
−α1
)ζ1(Tπ(s), π − φ, π)
+
(β1
α1
)ζ1(T
−1π (s), φ, 0) +
(−α1
−β1
)ζ1(s, π − φ, 0)
=
(β1
α1
)ζ1(T
−1π (s), φ, 0) +
(−α1
−β1
)ζ1(s, π − φ, 0).
Similarly, (0, Gi, Hi) (i = 2, 3) also satisfy (23), (24), and (25).
Here, we show the lemma used in the above lemmas.
Lemma A.5. T−10 (s) = Tπ(s), T−1
π (s) = T0(s).
Proof. Applying Lemma 4.5 to K = K(θ, φ, ψ), we see that
Θ(π − Θ(θ, φ, ψ) + θ, φ, ψ) + Θ(θ, φ, ψ) = π. (48)
Combining (21) with the definition of Tψ, we have
Γψ (Θ(0, π, ψ)Tψ(s)) = π − Θ(0, 0, ψ)s.
By the definition of Γψ,
π − Θ(Θ(0, π, ψ)Tψ(s), 0, ψ) + Θ(0, π, ψ)Tψ(s) = π − Θ(0, 0, ψ)s.
Put Θ0 := Θ(0, 0, 0) and Θ1 := Θ(0, π, 0). Then, by (22) and (21),
Θ0 = Θ(0, π, π), Θ1 = Θ(0, 0, π) = π − Θ0.
Thus, we obtain
π − Θ(Θ1T0(s), 0, 0) + Θ1T0(s) = π − Θ0s, (49)
π − Θ(Θ0Tπ(t), 0, π) + Θ0Tπ(t) = π − Θ1t, (50)
for s, t ∈ [0, 1], and such T0(s), Tπ(t) ∈ [0, 1] is uniquely determined, since Γψ :[0,Θ(0, π, ψ)] → [π − Θ(0, 0, ψ), π] is bijective by Lemma 4.12.
54

Mahler’s conjecture in the three dimensional case
On substituting (θ, φ, ψ) = (Θ0Tπ(t), 0, π) into (48), we have
Θ(π − Θ(Θ0Tπ(t), 0, π) + Θ0Tπ(t), 0, π
)+ Θ(Θ0Tπ(t), 0, π) = π.
By (50) and Lemmas 4.7 and 4.10, the first term of the left-hand side is
Θ(π − Θ(Θ0Tπ(t), 0, π) + Θ0Tπ(t), 0, π
)= Θ(π − Θ1t, 0, π)
= Θ(X(π)X(−Θ1t)Z(π)K)
= Θ(X(−Θ1t)Z(π)K)
= Θ(Z(π)X(Θ1t)K)
= π − Θ(X(Θ1t)K)
= π − Θ(Θ1t, 0, 0).
By (50),Θ(Θ0Tπ(t), 0, π) = Θ0Tπ(t) + Θ1t.
Consequently, we get
π − Θ(Θ1t, 0, 0) + Θ1t = π − Θ0Tπ(t).
By (49) with s = Tπ(t), the uniqueness asserts that t = T0(Tπ(t)).
Proof of Proposition 5.1. For
F =(F , G, H)√F 2 + G2 + H2
: ∂D → S2,
we consider the following conditions:
(C1) F is homotopic to F .
(C2) F 2 + G2 + H2 6= 0 on ∂D.
(C3) (F , G, H) satisfies the identities (23), (24), and (25).
(C4) G2 + H2 6= 0 at the vertices of ∂D.
(C5) G2 + H2 6= 0 on ∂Mi (i = 1, . . . , 6).
We shall construct F such that the conditions (C1)–(C5) hold and (±1, 0, 0) ∈ S2
are regular values of F .First, we put
F0 :=(F, G0, H0)√F 2 + G2
0 + H20
:=(F,G+ α0G0, H + α0H0)√
F 2 + (G+ α0G0)2 + (H + α0H0)2: ∂D → S2,
where we take sufficiently small α0 > 0 if (G2 + H2)(0, 0, 0) = 0, take α0 = 0 if(G2 +H2)(0, 0, 0) 6= 0. Then
(G20 + H2
0 )(0, 0, 0) = (G(0, 0, 0) + α0)2 + (H(0, 0, 0))2 6= 0. (51)
55

Mahler’s conjecture in the three dimensional case
By Lemma A.3, (0, G0, H0) satisfies (23), (24), and (25). By (51) and Remark A.2,(C4) holds for (F, G0, H0).
Since F 2 + G2 + H2 6= 0 on ∂D by the assumption, for sufficiently small α0,F 2 + (G+α0G0)2 + (H +α0H0)
2 6= 0 on ∂D. Thus, F0 satisfies the conditions (C1)
and (C2). By Lemma A.3, F0 satisfies the condition (C3). Consequently, (C1)–(C4)
hold for F0.
Second, by continuity, there exist δ0 > 0 and δ1 > 0 such that√G2
0 + H20 ≥ δ1
on δ0-neighborhood of the vertices of D. For αi and βi above with√α2i + β2
i ≤ δ1/4,
on δ0-neighborhood of the vertices, we see |(Gi, Hi)| ≤√α2i + β2
i ≤ δ1/4. Thus
|(G0 +G1 +G2 +G3, H0 +H1 +H2 +H3)| ≥ |(G0, H0)| −3∑
i=1
|(Gi, Hi)| ≥ δ1/4 > 0
on δ0-neighborhood of the vertices.Thus, the points on ∂Mi with (G0 +G1 +G2 +G3, H0 +H1 +H2 +H3) = (0, 0)
are contained in the following 12 lines: [δ0/2, 1 − δ0/2] × {0, π} × {0, π}, {0, 1} ×[δ0/2, π− δ0/2] × {0, π}, {0, 1} × {0, π} × [δ0/2, π− δ0/2]. Moreover, on the 12 lines,(Gi, Hi) (i = 1, 2, 3) are constants. Consider the image U of (G+ α0G0, H + α0H0)on the 12 lines. Since U is the union of 12 curves of class C∞, the 2-dimensionalLebesgue measure of U is 0. Therefore, there exists αi, βi such that |αi| and |βi| aresmall, and
(±αi,±βi) ∩ U = ∅, (±βi,±αi) ∩ U = ∅for i = 1, 2, 3. In this setting, on the 12 lines, we obtain
(G0 +G1 +G2 +G3, H0 +H1 +H2 +H3) 6= (0, 0).
Thus, we put G1 := G0 +G1 +G2 +G3, H1 := H0 +H1 +H2 +H3, and
F1 :=(F, G1, H1)√F 2 + G2
1 + H21
: ∂D → S2
for sufficiently small |αi| and |βi|. Then F1 satisfies (C1)–(C5).
Next, we will construct a deformation of F1 which satisfies that (±1, 0, 0) areits regular values on M1 ∪M2.
Since (G1, H1) 6= (0, 0) on ∂M1, there exists δ2 > 0 such that√G2
1 + H21 ≥ δ2 on V,
where V ⊂ M1 is some small neighborhood of ∂M1. By Sard’s theorem, there exist
positive real numbers α4, β4 with√α2
4 + β24 ≤ δ2/2 such that (α4, β4) is a regular
value of (G1, H1) on M1, and (−β4, α4) is a regular value of (G1, H1) on M2. We notethat, since |α4| and |β4| are small, F 6= 0 at the regular points (G1, H1)
−1(α4, β4) onM1 and (G1, H1)
−1(−β4, α4) on M2. Let ζ4(φ, ψ) ∈ C∞0 (intM1, [0, 1]) be a cut-off
function such that ζ4 = 1 on M1 \ V . We put
(G4, H4)(s, φ, ψ) :=
(α4ζ4(φ, ψ), β4ζ4(φ, ψ)) if (s, φ, ψ) ∈ M1,
(−β4ζ4(φ, ψ), α4ζ4(φ, ψ)) if (s, φ, ψ) ∈ M2,
(0, 0) if (s, φ, ψ) ∈ M3 ∪ · · · ∪M6.
56

Mahler’s conjecture in the three dimensional case
Then (0, G4, H4) satisfies (23), (24), and (25). Thus, we define G2 := G1 − G4,H2 := H1 −H4, and
F2 :=(F, G2, H2)√F 2 + G2
2 + H22
: ∂D → S2.
Then, F2 satisfies (C1)–(C5). On V (⊂ M1), we obtain
|(G2, H2)| ≥ |(G1, H1)| − |(G4, H4)| ≥ δ2
2> 0.
So, there exist no zeros of (G2, H2) on V . On M1 \ V , we have
(G2, H2) = (0, 0) if and only if (G1, H1) = (α4, β4).
Thus, by the definition of (α4, β4), (0, 0) is a regular value of (G2, H2) on M1 \ V ,
and F 6= 0 at the regular values. Therefore, (±1, 0, 0) are regular values of F2 on
M1. Similarly, we obtain that (±1, 0, 0) are regular values of F2 on M2.
Moreover, we can modify F2 similarly with respect to M3, . . . ,M6. Then themodified F satisfies the conditions (i)–(iv) in Proposition 5.1.
B The case with a hyperplane symmetry
Although, for a general K ∈ K, it is very hard to find a suitable linear transformationA such that AK satisfies the condition (10), it is not so difficult to do so if K hasadditional symmetries. In this appendix, let us consider the case where K ∈ K issymmetric with respect to a plane. We start with the following simple observation.
Example. Consider the case that K is symmetric with respect to the yz-plane,zx-plane, and xy-plane (more generally, its image AK by a linear transformationA is symmetric with respect to these three planes). In this case, the condition(10) automatically holds, and hence we have P(K) ≥ 32/3. This fact is the threedimensional case of the result by Saint-Raymond [SR].
From now on, suppose that K ∈ K is symmetric with respect to a plane. Sincethe volume product is invariant under linear transformations of K, we may assumethat the hyperplane of symmetry is the yz-plane. In this case, the area of O ∗ βand that of O ∗ (−b) coincide. Taking the signs into consideration, β = b holds.Similarly, γ = c holds. Concerning the volume of the eight parts of K, we have
|K+++| = |K−++| = |K+−−|, |K+−+| = |K−−+| = |K++−|.Consequently, the condition (10) holds, provided K satisfies
α = a, |K+++| = |K+−+|. (52)
For a given convex body K ∈ K, we consider the image of K by the following lineartransformation:
A(ϕ)X(θ)
xyz
=
1 0 00 1 ϕ0 0 1
1 0 00 cos θ − sin θ0 sin θ cos θ
xyz
.
57

Mahler’s conjecture in the three dimensional case
For K ∈ K, we introduced vectors α = (α1, α2, α3), etc., in Section 3.3. Fromnow on, to clarify the dependence on the convex body, we denote the vector α forA(ϕ)X(θ)K ∈ K by α(A(ϕ)X(θ)K), etc. Similarly, for the image A(ϕ)X(θ)K ∈ Kof a convex body K, we denote by (A(ϕ)X(θ)K)+++, . . . the decomposition inSection 3.2.
First, since A(ϕ) and X(θ) keep the symmetry of K with respect to the yz-plane,we have
β(A(ϕ)X(θ)K) = b(A(ϕ)X(θ)K),
γ(A(ϕ)X(θ)K) = c(A(ϕ)X(θ)K),
|(A(ϕ)X(θ)K)+++| = |(A(ϕ)X(θ)K)−++| = |(A(ϕ)X(θ)K)+−−|,|(A(ϕ)X(θ)K)+−+| = |(A(ϕ)X(θ)K)−−+| = |(A(ϕ)X(θ)K)++−|
for any ϕ, θ ∈ R. Next, for a given θ ∈ R we can choose ϕ = ϕ(θ) ∈ R to satisfy
|(A(ϕ)X(θ)K)+++| = |(A(ϕ)X(θ)K)+−+|,
see Proposition 4.2 in the special case that Φ(A(ϕ)X(θ)K) = Ψ(A(ϕ)X(θ)K) = π/2,|(A(ϕ)X(θ)K)+++| = |(A(ϕ)X(θ)K)−++|, |(A(ϕ)X(θ)K)−−+| = |(A(ϕ)X(θ)K)+−+|for X(θ)K. Note that such ϕ is uniquely determined for each θ, and ϕ depends onθ continuously. Moreover, we can easily see that there exists some θ0 such thatϕ(θ0) = 0. In this setting, we obtain ϕ(θ0 + π/2) = 0 and
α(A(ϕ(θ0 + π/2))X(θ0 + π/2)K) = α(X(θ0 + π/2)K) = a(A(ϕ(θ0))X(θ0)K),
a(A(ϕ(θ0 + π/2))X(θ0 + π/2)K) = a(X(θ0 + π/2)K) = α(A(ϕ(θ0))X(θ0)K).(53)
Next, we put
F (θ) := α(A(ϕ(θ))X(θ)K) − a(A(ϕ(θ))X(θ)K).
Since ϕ is continuous with respect to θ, F is continuous on R. By (53), we haveF (θ0 + π/2) = −F (θ0). By using the intermediate value theorem, there existsθ1 ∈ [θ0, θ0 + π/2] such that F (θ1) = 0, which yields
α(A(ϕ(θ1))X(θ1)K) = a(A(ϕ(θ1))X(θ1)K).
Consequently, A(ϕ(θ1))X(θ1)K ∈ K satisfies the condition (52), and hence (10).Since A(ϕ(θ1))X(θ1) is a linear transformation of R3, we obtain
P(K) = P(A(ϕ(θ1))X(θ1)K) ≥ 32
3.
Thus, we have proved the following
Proposition B.1. Let K ∈ K be a three dimensional centrally symmetric convexbody which is symmetric with respect to a plane. Then P(K) ≥ 32/3 holds.
58

Mahler’s conjecture in the three dimensional case
Acknowledgements
The authors would like to thank the anonymous referees for their careful reading andvaluable comments, especially, for pointing out references [Me2] and [BMMR], forpointing out a simplification of the proof of Proposition 3.2, and for their suggestionsabout the notations of the eight parts decomposition of convex bodies K,K◦ andthe curves on their boundaries. Including them their valuable feedback has resultedin considerable improvements of exposition of the paper.
References
[AKO] S. Artstein-Avidan, R. Karasev, and Y. Ostrover, From symplectic measurements to theMahler conjecture, Duke Math. J. 163 (2014), no. 11, 2003–2022, DOI 10.1215/00127094-2794999.
[BF] F. Barthe and M. Fradelizi, The volume product of convex bodies with many hyperplanesymmetries, Amer. J. Math. 135 (2013), no. 2, 311–347, DOI 10.1353/ajm.2013.0018.
[BM] J. Bourgain and V. D. Milman, New volume ratio properties for convex symmetric bodiesin R
n, Invent. Math. 88 (1987), no. 2, 319–340, DOI 10.1007/BF01388911.
[BMMR] K. J. Böröczky, E. Makai Jr., M. Meyer, and S. Reisner, On the volume product of planarpolar convex bodies—lower estimates with stability, Studia Sci. Math. Hungar. 50 (2013),no. 2, 159–198, DOI 10.1556/SScMath.50.2013.2.1235.
[FMZ] M. Fradelizi, M. Meyer, and A. Zvavitch, An application of shadow systems to Mahler’sconjecture, Discrete Comput. Geom. 48 (2012), no. 3, 721–734, DOI 10.1007/s00454-012-9435-3.
[GMR] Y. Gordon, M. Meyer, and S. Reisner, Zonoids with minimal volume-product—a newproof, Proc. Amer. Math. Soc. 104 (1988), no. 1, 273–276, DOI 10.2307/2047501.
[HZ] H. Hofer and E. Zehnder, Symplectic invariants and Hamiltonian dynamics, BirkhäuserAdvanced Texts: Basler Lehrbücher. [Birkhäuser Advanced Texts: Basel Textbooks],Birkhäuser Verlag, Basel, 1994.
[K] G. Kuperberg, From the Mahler conjecture to Gauss linking integrals, Geom. Funct. Anal.18 (2008), no. 3, 870–892, DOI 10.1007/s00039-008-0669-4.
[KR] J. Kim and S. Reisner, Local minimality of the volume-product at the simplex, Mathe-matika 57 (2011), no. 1, 121–134, DOI 10.1112/S0025579310001555.
[LR] M. A. Lopez and S. Reisner, A special case of Mahler’s conjecture, Discrete Comput.Geom. 20 (1998), no. 2, 163–177, DOI 10.1007/PL00000076.
[Ma1] K. Mahler, Ein Minimalproblem für konvexe Polygone, Mathematica (Zutphen) B 7
(1939), 118–127 (German).
[Ma2] , Ein Übertragungsprinzip für konvexe Körper, Časopis Pěst. Mat. Fys. 68 (1939),93–102 (German).
[Me] M. Meyer, Convex bodies with minimal volume product in R2, Monatsh. Math. 112
(1991), no. 4, 297–301, DOI 10.1007/BF01351770.
[Me2] , Une caractérisation volumique de certains espaces normés de dimension finie, Is-rael J. Math. 55 (1986), no. 3, 317–326, DOI 10.1007/BF02765029 (French, with Englishsummary).
[Mi] H. Minkowski, Volumen und Oberfläche, Math. Ann. 57 (1903), no. 4, 447–495, DOI10.1007/BF01445180 (German).
59

Mahler’s conjecture in the three dimensional case
[MP] M. Meyer and A. Pajor, On the Blaschke-Santaló inequality, Arch. Math. (Basel) 55
(1990), no. 1, 82–93, DOI 10.1007/BF01199119.
[MR] M. Meyer and S. Reisner, On the volume product of polygons, Abh. Math. Semin. Univ.Hambg. 81 (2011), no. 1, 93–100, DOI 10.1007/s12188-011-0054-3.
[NPRZ] F. Nazarov, F. Petrov, D. Ryabogin, and A. Zvavitch, A remark on the Mahler conjec-ture: local minimality of the unit cube, Duke Math. J. 154 (2010), no. 3, 419–430, DOI10.1215/00127094-2010-042.
[OR] E. Outerelo and J. M. Ruiz, Mapping degree theory, Graduate Studies in Mathematics,vol. 108, American Mathematical Society, Providence, RI; Real Sociedad MatemáticaEspañola, Madrid, 2009.
[R1] S. Reisner, Random polytopes and the volume-product of symmetric convex bodies, Math.Scand. 57 (1985), no. 2, 386–392, DOI 10.7146/math.scand.a-12124.
[R2] , Zonoids with minimal volume-product, Math. Z. 192 (1986), no. 3, 339–346,DOI 10.1007/BF01164009.
[RSW] S. Reisner, C. Schütt, and E. M. Werner, Mahler’s conjecture and curvature, Int. Math.Res. Not. IMRN 1 (2012), 1–16, DOI 10.1093/imrn/rnr003.
[Sa] L. A. Santaló, An affine invariant for convex bodies of n-dimensional space, PortugaliaeMath. 8 (1949), 155–161 (Spanish).
[Sc1] R. Schneider, Convex bodies: the Brunn-Minkowski theory, Second expanded edition,Encyclopedia of Mathematics and its Applications, vol. 151, Cambridge University Press,Cambridge, 2014.
[Sc2] , Smooth approximation of convex bodies, Rend. Circ. Mat. Palermo (2) 33 (1984),no. 3, 436–440, DOI 10.1007/BF02844505.
[SR] J. Saint-Raymond, Sur le volume des corps convexes symétriques, Initiation Seminar onAnalysis: G. Choquet-M. Rogalski-J. Saint-Raymond, 20th Year: 1980/1981, Publ. Math.Univ. Pierre et Marie Curie, vol. 46, Univ. Paris VI, Paris, 1981, pp. Exp. No. 11, 25(French).
[V] C. Viterbo, Metric and isoperimetric problems in symplectic geometry, J. Amer. Math.Soc. 13 (2000), no. 2, 411–431 (electronic), DOI 10.1090/S0894-0347-00-00328-3.
60












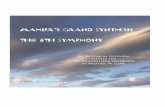





![PARITY SHEAVES AND THE HECKE CATEGORY · tions of reductive algebraic groups and the James conjecture [Jam90] on simple representations of symmetric groups) which would imply that](https://static.fdocuments.net/doc/165x107/5f113eb310b51271ce4699e8/parity-sheaves-and-the-hecke-tions-of-reductive-algebraic-groups-and-the-james-conjecture.jpg)