Study on Jacobian, Singularity and Kinematics Sensitivity of The
24
Study on Jacobian, singularity and kinematics sensitivity of the FUM 3-PSP parallel manipulator Amir Rezaei ⁎, Alireza Akbarzadeh Mechanical Engineering Department, Center of Excellence on Soft Computing and Intelligent Information Processing, (SCIIP), Ferdowsi University of Mashhad, Mashhad, Iran article info abstract Article history: Received 19 April 2014 Received in revised form 10 November 2014 Accepted 12 November 2014 Available online 8 January 2015 The Jacobian matrices of a robot are commonly utilized in determining its dynamic behavior, workspace singular regions as well as manipulability and sensitivity analysis. This paper provides a new general perspective in analyzing workspace, singularity and sensitivity analyses. This per- spective can aid both end-users and robot designers to assess effect of desired end-effector accu- racy on required actuator accuracy as well as effect of selected actuator accuracy on the resulting end-effector accuracy. To do this, a 3-PSP parallel robot with specific architecture is considered. Two operational modes called non-pure translational and coupled mixed type modes are consid- ered and Jacobian matrices are obtained and the inverse and direct relations for velocity and accel- eration are derived. A methodology to select the most practical operational modes is represented. Next the three well-known singularities as well as the constraint singularity are investigated. Ad- ditionally, notion of inverse kinematics singularity (IKS) is defined and existing IKS loci in workspace for the two operational modes are determined. Finally, for the two operational modes, the direct and inverse sensitivity analyses are investigated by defining concept of direct and inverse squared Jacobian matrices. In the direct sensitivity analysis, influence of actuator er- rors on the position and orientation errors of the moving platform (MP) is determined. In the in- verse sensitivity analysis, the allowable actuator error boundaries are determined with respect to desired MP pose errors. © 2014 Elsevier Ltd. All rights reserved. Keywords: Sensitivity analysis Jacobian matrix Singularity Operational modes Actuator accuracy End-effector accuracy 1. Introduction Researches on applications of Parallel Kinematic Machines (PKMs) continue to attract the attention of many industrial companies, specifically, limited-degrees of freedom (DOFs) PKMs [1,2]. PKMs offer many advantages such as, high positioning accuracy, high static/dynamic inherent rigidity, low inertia, high nominal load-to-weight ratio and good dynamic performance. Additionally, the PKMs with the lower DOFs have most of the inherent capabilities of the parallel robots and can be made with lower manufacturing cost [1–3]. These advantages of PKMs give them the capability to be used in many high-speed precision industrial applications [4–6]. Examples of these applications are, machine tools, orienting devices, fine positioning devices, fast assembly, cutting and welding machines, flight simulators and medical devices [5–10]. As applications of robotics increase so do the need for their accuracy. Accuracy evaluation is one of the basic analyses used in robotics field. It is one of the key features to development of the machine tool and robotics industries. The servo actuator resolutions, inaccuracy in the assembly and manufacturing processes, joints clearance and compliance modules in the mechanism are the some of the more common sources of errors in robotics systems [8,11,12]. The sensitivity analysis is an important activity during the design process of robotics systems. The sensitivity analysis determines influence of variations in the geometric parameters and/or actuators of a robot on its performance [12]. This analysis can also be Mechanism and Machine Theory 86 (2015) 211–234 ⁎ Corresponding author. Tel.: +98 915 525 5471; fax: +98 511 876 3301. E-mail addresses: [email protected] (A. Rezaei), [email protected] (A. Akbarzadeh). http://dx.doi.org/10.1016/j.mechmachtheory.2014.11.009 0094-114X/© 2014 Elsevier Ltd. All rights reserved. Contents lists available at ScienceDirect Mechanism and Machine Theory journal homepage: www.elsevier.com/locate/mechmt
description
Jacobian
Transcript of Study on Jacobian, Singularity and Kinematics Sensitivity of The
-
Received 19 April 2014Received in revised form 10 November 2014Accepted 12 November 2014Available online 8 January 2015
Keywords:Sensitivity analysis
ndustrial applicationsassembly, cutting andeed for their accuracy.nt of themachine tool
Mechanism and Machine Theory 86 (2015) 211234
Contents lists available at ScienceDirect
Mechanism and Machine Theoryand robotics industries. The servo actuator resolutions, inaccuracy in the assembly andmanufacturing processes, joints clearance andcompliance modules in the mechanism are the some of the more common sources of errors in robotics systems [8,11,12].
The sensitivity analysis is an important activity during the design process of robotics systems. The sensitivity analysis determinescost [13]. These advantages of PKMs give them the capability to be used in many high-speed precision i[46]. Examples of these applications are, machine tools, orienting devices, ne positioning devices, fastweldingmachines, ight simulators andmedical devices [510]. As applications of robotics increase so do the nAccuracy evaluation is one of the basic analyses used in robotics eld. It is one of the key features to developmeResearches on applications of Parallel Kinematic Machines (PKMs) continue to attract the attention of many industrial companies,specically, limited-degrees of freedom (DOFs) PKMs [1,2]. PKMs offer many advantages such as, high positioning accuracy, highstatic/dynamic inherent rigidity, low inertia, high nominal load-to-weight ratio and good dynamic performance. Additionally, thePKMs with the lower DOFs have most of the inherent capabilities of the parallel robots and can be made with lower manufacturing1. Introductioninuence of variations in the geometric par
Corresponding author. Tel.: +98 915 525 5471; faxE-mail addresses: [email protected] (A. R
http://dx.doi.org/10.1016/j.mechmachtheory.2014.11.000094-114X/ 2014 Elsevier Ltd. All rights reserved.workspace singular regions as well as manipulability and sensitivity analysis. This paper providesa new general perspective in analyzing workspace, singularity and sensitivity analyses. This per-spective can aid both end-users and robot designers to assess effect of desired end-effector accu-racy on required actuator accuracy as well as effect of selected actuator accuracy on the resultingend-effector accuracy. To do this, a 3-PSP parallel robot with specic architecture is considered.Two operational modes called non-pure translational and coupled mixed type modes are consid-ered and Jacobianmatrices are obtained and the inverse and direct relations for velocity and accel-eration are derived. A methodology to select the most practical operational modes is represented.Next the three well-known singularities as well as the constraint singularity are investigated. Ad-ditionally, notion of inverse kinematics singularity (IKS) is dened and existing IKS loci inworkspace for the two operational modes are determined. Finally, for the two operationalmodes, the direct and inverse sensitivity analyses are investigated by dening concept of directand inverse squared Jacobian matrices. In the direct sensitivity analysis, inuence of actuator er-rors on the position and orientation errors of the moving platform (MP) is determined. In the in-verse sensitivity analysis, the allowable actuator error boundaries are determined with respect todesired MP pose errors.
2014 Elsevier Ltd. All rights reserved.Jacobian matrixSingularityOperational modesActuator accuracyEnd-effector accuracyStudy on Jacobian, singularity and kinematics sensitivity of theFUM 3-PSP parallel manipulator
Amir Rezaei, Alireza AkbarzadehMechanical Engineering Department, Center of Excellence on Soft Computing and Intelligent Information Processing, (SCIIP), Ferdowsi University of Mashhad, Mashhad, Iran
a r t i c l e i n f o a b s t r a c t
Article history: The Jacobian matrices of a robot are commonly utilized in determining its dynamic behavior,
j ourna l homepage: www.e lsev ie r .com/ locate /mechmtameters and/or actuators of a robot on its performance [12]. This analysis can also be
: +98 511 876 3301.ezaei), [email protected] (A. Akbarzadeh).
9
-
viewed as providing relation between geometrical and actuator errors on the pose accuracy of the robot. Having information on thesensitivity of a robot can aid the robot designers in design, component selection and construction of the robot [13]. To do this, the dex-terity and themanipulability indices can be used to evaluate the sensitivity of robot performance in terms of actuated joint variations[12,1417].
To evaluate the robot sensitivity in its entire workspace, rst the relations between actuators and end-effector variations must beobtained. Todo this, analyses such as the kinematics, Jacobianmatrices andworkspace analyses are used. The kinematics, Jacobian andsingularity analyses of PKMs have been studied by many researchers [7,8,1832]. Merlet [7] revisit the concepts of Jacobian matrix,manipulability and condition number for parallel robots as accuracy indices in view of optimal design. In [8], the sensitivity modelof a spindle platform subjected to structure parameters is analyzed and inuence of all parameters on the position and orientationof the spindle platform are analytically estimated. Jin and Chen [33] identied three basic types of constraint errors and suggestedan approach to evaluate the effects of constraint errors on decoupling characteristics of a 6-DOF parallel robot with decoupled trans-lation and rotation. In [34] the effects of joint clearance on the parallel robot accuracy are evaluated using an analytical form to predictpose errors for a 3-UPU parallel robot. Cardou et al. denedmaximum rotation andmaximumpoint-displacement sensitivities whichprovide upper bounds for the end-effector rotation and point-displacement sensitivity [35]. A comparison of the sensitivity for 3-DOFplanar parallel manipulators is investigated [13,36] and two aggregate sensitivity indices for position and orientation of the movingplatform are determined. Also, Saadatzi et al. [37] presented a robust geometric approach for computing the kinematic sensitivity per-formance index for the case of planar parallel mechanisms. They also explored the concept of the global kinematic sensitivity index.Wu et al. [38] developed a new error model with considerations of both conguration errors and joint clearances for a 3-PPR planar
tication of degrees of freedom and operational modes is investigated. In Section 5, vector description and inverse position analysis
212 A. Rezaei, A. Akbarzadeh / Mechanism and Machine Theory 86 (2015) 211234are completed. In Section 6, using auxiliary vectors, analytical expressions for direct and inverse velocity and acceleration relationsare derived as overall form. Additionally, these relations are obtained for two selected operational modes. In Section 7, using Jacobianmatrices, the three conventional types of singularities and constraint singularity are analyzed. Additionally, the concept of inverse ki-nematics singularity for each operational mode is investigated for the 3-PSP robot. Finally, in Section 8, the inverse and direct sensi-tivity analyses are investigated for two operational modes by dening concept of direct and inverse squared Jacobianmatrices of thetwo modes.
2. The 3-PSP parallel mechanism
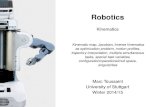
In the present paper, a specic architecture of a 3-PSP parallel manipulator which is constructed in FUM Robotics Research Center isconsidered. The 3-PSP robot is a fully parallel mechanismwith 3-DOFs in space. The robot consists of a moving platform shaped like asymmetric tripetalous star, two xed platforms and three identical legs. The moving star (MS) and the xed platforms are connectedusing three identical parallel legs. Each leg makes a serial kinematic chain as PrismaticSphericalPrismatic, PSP. The rst P-joint ineach leg is the active joint while the S-joint and the second P-joint are the passive joints [9,31]. See Fig. 1(a).
(a) (b)
a1 xz
y
{B}
u
w
v
{T}
b1
q1
t
T
P
s1
A1
S1
h
tp
x
z
y
{B}x yz
{B}
vuw
{T}
P
T
Fig. 1. (a) The physical model of a 3-PSP parallel robot and (b) Vectors and coordinate frames.parallel manipulator. Using the model, the pose error estimation problem is formulated as an optimization problem and the upperbounds and distributions of the pose errors are established.
In the present paper, the sensitivity analysis includes the inuence of actuator variations on pose accuracy of the robot. To do this, aspecic architecture of the 3-PSP parallel robot is selected and its Jacobian, singularity aswell as the direct and inverse sensitivity anal-yses are investigated. Additionally, the concepts of direct and inverse squared Jacobian matrices are introduced. The presented con-cept in this paper can aid both end-users and robot designers to assess effect of desired end-effector accuracy on required actuatoraccuracy as well as effect of selected actuators accuracy on the resulting end-effector precision.
This paper is organized as follows. In Sections 2 and 3, structure andmotion variables of the robot are addressed. In Section 4, iden-
-
3. Description of joints coordinates for the 3-PSP robot
The virtual prototype and physical models of a 3-PSP parallel manipulator are depicted in Fig. 1. In this gure, the general and localcoordinate frames for the 3-PSP robot are depicted. The general coordinate frames are dened as
Fixed coordinate frame B{x, y, z} is embedded at point O on top xed triangle A1A2A3 Moving coordinate frame T{u, v, w} is attached to center of the MS, at point T.
In this paper, a leading superscript represents the coordinate frame inwhich the vector is referenced. The essential vectors to solve
Earrequirmost o
213A. Rezaei, A. Akbarzadeh / Mechanism and Machine Theory 86 (2015) 211234spect to the type of DOFs used by their moving platform. These categories are: (a) pure translational, e.g. the 3-UPU and 3-PRCrobot, (b) pure rotational, e.g. spherical robots and the Agile Eyemechanism and (c) pure and non-pure coupledmixed-types motion(two translational and one rotational, T2R1-type, or two rotational and one translational, R2T1-type), e.g. the 3-PRS robot [31]. Thespatial 3-DOFs parallel robots with pure coupledmixed-typemotions, their moving platform have pure R2T1 or T2R1 DOFs.Whereas,themoving platform of spatial 3-DOFs parallel robotswith non-pure coupledmixed-typemotions have non-pure R2T1 or T2R1DOFs.Thismeans that, themoving platform of robots with non-pure coupledmixed-typeDOFs have parasitic or uncontrollablemotions e.g.the 3-PRS and 3-PSP robots. Also, Li et al. study a number of pure R2T1 type parallel robots [39].
In spatial non-pure coupled mixed-type, i.e., complex m-DOFs parallel robots (m b 6), the operational modes can be denedthrough selection of independent DOFs of the moving platform. For a spatial parallel robot withm degrees of freedom anym combi-nation from n=6motion variables of themoving platform can be selected asmode of operation for the robot. Consider a spatial com-plex 3-DOFs parallel robot with 3 translational and 3 rotational motion variables as XYZ. Then, each 3 combination from 6motionvariables of the moving platform can be selected and represent the corresponding operational mode. The selected 3-DOFs are inde-pendent and are controllable. The remaining 3-DOFs are not independent, are uncontrollable and are commonly referred to as causingparasitic motion. It is worth noting that for each operational mode a different method must be employed to evaluate the inverse ki-nematics, Jacobian matrices and reachable workspaces. The DOFs of the 3-PSP moving platform robot result in non-pure coupledmixed-type motions. To obtain all the 3-PSP operational modes,m=3 combination from n=6motion variables of themoving plat-form,XYZ, can be selected. Therefore, the number of conceivable operationalmodes for the 3-PSP robot can be expressed as
nm
n!
m! nm ! 6!
3! 63 ! 20: 1
The potential operational modes for the 3-PSP complex 3-DOFs parallel robot are manually selected and illustrated in Table 1.The Euler angle is the rotation angle of themoving platform about z-axis of themoving frame {T}. For many applications such as
welding, this rotation is not necessary and inmany other applications such as drilling, this rotation is commonly applied by the rotat-ing tool. Furthermore, the rotational variables and can be changed independent of the variable. Conversely, structure of the 3-PSPactuators does not allows theMS to independently rotate about z-axis, , without effecting the Euler angles and . Therefore, it canbe stated that the rotation angles of theMS about x and y-axes, i.e., and , are more desirable than the rotation angle . Finally, con-sider the non-pure rotational mode (R3), . If the orientation of the MS is given, the set of 9 non-linear algebraic kinematics equa-tions, 9 1(q)= 09 1, is a linear system of nine equations in nine unknowns. Then, the number of answers for this set of equation, tosolve the inverse kinematics (InvKin) is innite. Hence, the non-pure rotational mode cannot be considered as a feasible
Table 1The potential operational modes for the 3-PSP parallel robot.
Non-pure translationalmode (T3)
Non-pure rotationalmode (R3)
Non-pure coupled mixed-typemode (T1R2)
Non-pure coupled mixed-typemode (T2R1)
Operational mode XYZ X, Y, Z XY, XY, XYX, Y, Z XZ, XZ, XZX, Y, Z YZ, YZ, YZlier parallel robotswere designedmostlywith 6-DOFs. However, there aremanypractical applicationswhere 6-DOFs are not alled. Thereafter, interest remains for parallel robots with lower than 6-DOFs resulting in lowermanufacturing cost while keepingf the inherent capabilities of the parallel robots. The 3-DOFs spatial parallel robots can be classied into 3 categories with re-the kinematics modeling are dened as follows
Three position vectors Bai locate corners of the xed base, Ai, in {B} Three position vectors Bqiac specify length of linear rods (LR) Three position vectors Tbi each connects the end-effector, point T, to the ith S-joint, Si Position of the end-effector, point T, with respect to {B} is given by vectors Bt Position of the tool tip, point P, with respect to {B} is given by vectors Bp The position vector Th is a vector which connects point T to point P in {T}.
4. Identication of degrees of freedom and operational modes
-
ciple DThe
assumprincipthrougand is
tion anof theThe sy
whereand ar
where
214 A. Rezaei, A. Akbarzadeh / Mechanism and Machine Theory 86 (2015) 211234To transfer a vector dened in {T} to {B}, the rotation matrix, TBRmaybe used as
BTR Rz;Ry;Rx;
ux vx wxuy vy wyuz vz wz
24
35 c c s c c s s s s c s cs c c c s s s c s s s c
s c s c c
24
35 5
where, c and s stand for cosine and sine, respectively. Therefore, to obtain a vector in {B}, B, form a dened vector in {T}, T, we canuse, B= TBRT. Depending on the selected DOFs, three of the six MS variables are chosen and the remaining nine variables are calcu-lated using InvKin problem. For each selected operational mode, a different InvKin solution strategy is used to solve Eq. (2). The rela-tionship between inputs and outputs of the InvKin for the operational modes may be stated as
XYZ mode: Inputs: xp; yp; zp and qac1 ;q
ac2 ;q
ac3 ; ;;;b1;b2;b3
f 1 xp; yp; zpn o 6
Zmode: Inputs: ;; zp and qac1 ;q
ac2 ;q
ac3 ;xp; yp;;b1;b2;b3
n o f 2 zp; ;
n o: 7
Upon solving Eqs. (6) or (7), kinematic values of the robot necessary for Jacobian analysis are obtained. In [31] both analytical andnumerical methods to solve the InvKin for XYZ and Z operational modes are presented. To graphically show the dominance of theZ variables compared with the remaining variables, InvKin algorithm for the XYZ and Z operational modes are used for two dif-ferent trajectories of the end-effector. For both trajectories, it is assumed that tool length is set to h = 8 cm.Bt xT yT zTf gT; Bp xP yP zPf gT; Th 0 0 hf gT:used to describe the kinematic conguration of the 3-PSP parallel robot can be expressed by
Bai a cos i a sin i 0f gT; Tbi bi cos i bi sin i 0f gT; for i 2 i1 =3Bqaci 0 0 qaci
T for i 1; 2; 3 4q121 qac31 qunac91 fqac1 ;qac2 ;qac3|{z}
ac:
; xp; yp; zp; ;;;b1;b2;b3|{z}Unac:
gT 3q3 1ac and q9 1un ac are vectors of actuated and un-actuated variables, respectively. As shown in Fig. 1(b), the position vectorsing of the robot without considering the passive S-joints motion variables areBaiBqaci BTR TbiTh
Bp for i 1; 2; 3 2
TBR is a rotation matrix to transfer a vector dened in {T} to {B}. The constraint equations, Eq. (2), consist of 3 vector equationse equal to a set of 9 non-linear algebraic equations as9 1(q12 1)= 09 1. The general coordinates used for kinematicsmodel-vector-loop equations can be written as,two operational modes, non-pure translational XYZ and coupled mixed type Zmodes are considered for the inverse posi-d Jacobian analyses (See [31] for more details). Fig. 1(b) illustrates vectors and coordinate frames used for the InvKin problem3-PSP. Note that the vectors referenced in frame {B} are denoted by Bv, while vectors referenced in frame {T} are denoted by Tv.mmetrical structure of the 3-PSP helps arrive at three algebraically similar constraint equations. Consider Fig. 1(b). Three closedmodes. Therefore, when the phrases XYZ mode and Zmode are used, these mean non-pure translational XYZ mode and non-pure coupled mixed-type Zmode.
5. Vector description and inverse position analysis
TheOF of the MS.refore, referring to Table 1, excluding the XYZ and Z operationalmodes, all othermodes containing themotion variable z areed nonpractical and therefore eliminated. In the present paper, the non-pure coupled mixed-type mode Z is considered as ale operational mode for the 3-PSP robot. In this mode, all of the three MS motion variables, Z, and , have widely rangeshout the robot workspace. The non-pure translational XYZ operational mode may also nd practical positioning applicationstherefore selected as the second principle operational mode. Note that the 3-PSP robot does not have any pure operationaloperational mode. Consequently, the operational modes containing the Euler angle may be removed from the practical list of theoperational modes. This eliminates 9 choices from 20 possible operational modes, Table 1.
Next, consider workspace analysis of the 3-PSP robot presented in [31]. It is clear that the magnitude of variations in x and y aresignicantly smaller than the magnitude of variation in z. In other words, motion of MS along the z-axis can be considered as a prin-
-
5.1. Trajectory #1: planar trajectory in non-pure translational XYZ mode
In this trajectory, the tool tip traces a T-shape planar trajectory in Z= 10 cm plane. The end-effector trajectory, inverse kinematicresults and values for parasitic motion of the moving platform (,,) are depicted in Fig. 2.
5.2. Trajectory #2: trajectory in non-pure coupled mixed-type mode Z
In the second case study, trajectory of themoving platform is designed for Z operational mode. Consequently the values of X, Yand are the parasitic motion (see Fig. 3).
As can be seen from Figs. 2 and 3, themagnitude of overall changes in X, Y and are signicantly smaller than values of Z, and ,respectively.
6. Jacobian analysis
In this section, the two operationalmodes are considered and an analytical method is to obtain the Jacobianmatrices aswell as thevelocity and acceleration relations of the 3-PSP parallel robot.
6.1. Velocity analysis
For the velocity analysis, ith limb of the 3-PSP parallel robot is considered and both sides of the kinematics constraint equations,Eq. (2), is time differentiated to yield
qaci q^aci bib^i MS biMS hvp for i 1;2;3 8
whereq aci q^
aci andb
ib^i represent linear rods, LRs, and passive prismatic joints velocity vectors, respectively. Furthermore, vectorss andvp den
^
sides othree uform a
215A. Rezaei, A. Akbarzadeh / Mechanism and Machine Theory 86 (2015) 211234(c)
Fig. 2. (a) The end-effector trajectory, (b) the actuator values and (c) values for parasitic motions in XYZ mode.Jac q ac JMS tMS 9
(a) (b)ote angular velocity vector of theMS and Cartesian velocity vector of the tool tip, respectively. To eliminate the vectorsbibi, bothf Eq. (8) are dotmultipliedwith a specic unit vectorm^i b^i b^ j; for i 1; 2; 3 and j 2;3;1which is perpendicular to thenit vectors b^i. By dot multiplying unit vector m^i in Eq. (8) and then simplifying, this vector equation can be written in matrixs
-
wherevP
216 A. Rezaei, A. Akbarzadeh / Mechanism and Machine Theory 86 (2015) 211234equation in familiar form aswherepracticyet theof themaps t6 inveiliary vbetweb
ib^i teand bi
where
The36
q ac q ac1 q
ac2 q
ac3
T represents the LRs velocity vector and tMP vP MSf gT represents twist vector of the MS. Notevx vy vz
T and MS x y z T are dened in base coordinate frame {B}. In view of Eq. (9), we can rewrite thiswhere
Jac diag m^i q^aci
33 ; JMS m^iT bih m^i Th i
; for i 1;2;3 10Fig. 3. (a) The end-effector trajectory, (b) the actuator values and (c) values for parasitic motions in Zmode.(b) (c)(a)q ac JI JM tMP 11
JIJM= Jac1JMS is a 36 non-squarematrix called Inverse JacobianMatrix of the 3-PSPparallelmanipulator. Thismatrix hasmanyal applications such as calculating the robot stiffnessmatrix [9]. As stated earlier, although theMS of the 3-PSP robot has 3-DOF,MS is a 6-DOF rigid body in spacewhere its 3-DOF is dependent on the remaining 3-DOFs. Equation (11) relates all 6 velocitiesMS rigid body to 3 actuated joints velocities. Furthermore, it will be useful to obtain a 6 6 inverse square Jacobianmatrix thathe twist tMP of the end-effector to actuated and constraint joints velocities. In what follows, the Jacobian of constraints and 6 rse square Jacobianmatrix referred to as Full Inverse Jacobianmatrix are obtained. To obtain the Jacobian of constraints, the aux-ectors are introduced to eliminate passive velocity vectors (See [31] for more detailed explanations). To nd the relationshipenMS and vP, both sides of Eq. (8) are dot multiplied with unit vectors e^i b^i q^aci ; for i 1; 2; 3 to eliminate q
aci q^
aci and
rms. The unit vector i is along R-joint i in ith passive S-joint and is perpendicular to planes containing the two vectors, qiac
(see Fig. 4). Hence
Jvp vp Js MS 031 12
Jvp e^iTh i
33; Js bih e^i
Th i33
; for i 1;2;3: 13
refore, Eq. (12) can be re-written as
Jc tMP 031 14
-
to zeroCo
using Elier, JIJ
217A. Rezaei, A. Akbarzadeh / Mechanism and Machine Theory 86 (2015) 211234Themotivation for pursuing an Inverse Square JacobianMatrixwhichmaps the actuator velocities to only independent end effector
velocitand acthe Mindepeationawrite
wherevectoroperatn Matrix of the 3-PSP and is obtained by selecting the rst three columns of the JFIJM1 as
JDJM J1FIJM6 13 : 18Eq. (16) and rearranging yields
tMP JDJM q ac
: 17
This equation is called the direct velocity equation of the robot. Additionally, JDJM is a 6 3 non-square matrix called Overall DirectJacobiaibility of the matrix JFIJM. This matrix enables us to conveniently determine the direct velocity relation for the 3-PSP robotq. (16). Estimating actuator sensitivities is one of themainmotivations for obtaining the direct velocity relations. As stated ear-
M is not a square matrix. Therefore, the direct velocity relation cannot be obtained using Eq. (11). To remedy this, employingas
qac
031
JFIJM tMP JFIJM JI JMJc
66
16
where JFIJM is 6 6 square matrix called Full Inverse Jacobianmatrix. The primary advantage of Eq. (16) with respect to Eq. (11) isinvert[29]. Then, matrix Jc maps a virtual displacement vector of theMS, X, to constraints' virtual motion directions which are equal, 03 1.mbining Eqs. (11) and (14), yields the relationship between the linear actuated joints velocities, q
ac, and twist of the MS, tMP,The ith row in the Jacobian of constraintsmatrix, represents a unitwrench of constraints imposed by the joints of the ith limbof therobot, Jc is a 3 6 matrix called Jacobian of constraints for the 3-PSP parallel manipulator and is dened as
Jc Jvp Js
e^iT bih e^i Th i36; for i 1;2;3: 15where
Fig. 4. Denition of the ith unit vectors i.ies can be demonstrated in trajectory planning applications. In such applications, the independent MS velocities are speciedtuator speeds are obtained. As stated earlier, depending on the desired operational mode, three of the six motion variables ofS are selected. Then it is also desirable to determine a new 3 3 Inverse Square Jacobian Matrixwhich maps the three desirablendent MS speed components to the three actuators components. Using Eq. (17), the velocity relations for any arbitrary oper-l modes can be obtained. To obtain the 3 3 Direct Square Jacobian Matrix for any arbitrary operational modes, we can
vresmode JDJMmode q ac31 19
vres, called restricted twist vector, represents a velocity vector containing any arbitrary three of the six variables of theMS twist, tMP. The restricted twist vector, vres, can be dened as the restriction of tMP on the selected MS DOFs of the robot [7]. For anyional mode, we can write
JDJMmode JDJMrow#iJDJMrow# jJDJMrow#k
24
3533
20
-
mixed
obtain
where
genera3-PSPvelocit
where
theref
velocit
218 A. Rezaei, A. Akbarzadeh / Mechanism and Machine Theory 86 (2015) 21123416 3
By using Eq. (30), the direct and inverse velocity relations for any arbitrary operational mode can be obtained similar to the stepstaken in deriving Eqs. (19)(22) and (23)(24), respectively.y relation may be obtained as
tMP JDJM q ac JDJM J1OIJM Jac;overall
h i: 30where JODJM is a 9 3 matrix called the Overall Direct Jacobian Matrix. Additionally, similar to Eq. (17) and using Eq. (29), the directtMPb
91
JODJM q ac JODJM J1OIJM Jac;overall 29The JOIJM is a 9 9 square matrix and its inverse can be easily calculated. Using Eq. (25) the overall direct velocity relation may beobtained asMS bih bih I33 MS for i 1; 2; 3 27
ore
bih I33 bih 100
8