
STROMS - maulana.lecture.ub.ac.idmaulana.lecture.ub.ac.id/files/2012/12/STORMS-Tri-Wahyu.pdfberbagai...
22
STROMS (Smart Underwater Robot for Mapping Sea) ROBOT BAWAH AIR UNTUK PEMETAAN DASAR LAUT BERBASIS PLC OMRON Disusun Untuk Memenuhi Tugas Mata Kuliah Teknik Otomasi Dosen Pengampu : E ka Maulana, S.T., M.T., M.Eng. OLEH: Tri Wahyu O.Putri NIM. 105060300111036 Email : [email protected] KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN UNIVERSITAS BRAWIJAYA MALANG DESEMBER 2012
-
Upload
truongdung -
Category
Documents
-
view
230 -
download
1
Transcript of STROMS - maulana.lecture.ub.ac.idmaulana.lecture.ub.ac.id/files/2012/12/STORMS-Tri-Wahyu.pdfberbagai...

STROMS (Smart Underwater Robot for Mapping Sea)
ROBOT BAWAH AIR UNTUK PEMETAAN DASAR LAUT
BERBASIS PLC OMRON
Disusun Untuk Memenuhi Tugas Mata Kuliah
Teknik Otomasi
Dosen Pengampu : Eka Maulana, S.T., M.T., M.Eng.
OLEH:
Tri Wahyu O.Putri
NIM. 105060300111036
Email : [email protected]
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN
UNIVERSITAS BRAWIJAYA MALANG
DESEMBER 2012

KATA PENGANTAR
Puji syukur kami panjatkan kehadirat Allah SWT, Tuhan Yang Maha Esa yang
telah memberikan rahmat serta hidayah-Nya sehingga penyusunan tugas ini dapat
diselesaikan dengan baik tanpa kendala apapun. Tugas ini disusun untuk memenuhi
Tugas Mata Kuliah Teknik Otomasi berjudul “STROMS (Smart Underwater Robot
for Mapping Sea) ROBOT BAWAH AIR UNTUK PEMETAAN DASAR LAUT
BERBASIS PLC OMRON”. Terima kasih kami haturkan kepada semua pihak yang
membantu kelancaran penyusunan tugas akhir ini.
Demikianlah tugas ini disusun semoga bermanfaat, agar dapat memenuhi tugas
mata kuliah Teknik Otomasi.
Malang, Desember 2012
Penyusun
DAFTAR ISI
Halaman muka ………………………………………………………i
Kata Pengantar………………………………………………………..ii
Daftar Isi……………………………………………………………...iii
1. Deskripsi………………………………………………………….1
2. Sistem Kerja……………………………………………………...5
3. Inisialisasi I/O…………………………………………………….9
4. Ladder Diagram………………………………………………….10
5. Simulasi…………………………………………………………...13
6. Kesimpulan ………………………………………………………18
7. Saran……………………………………………………………...19
STROMS (Smart Underwater Robot for Mapping Sea) | 1
STROMS (Smart Underwater Robot for Mapping Sea)
ROBOT BAWAH AIR UNTUK PEMETAAN
DASAR LAUT BERBASIS PLC OMRON
1. DESKRIPSI a. Pengertian
Robot bawah air seperti robot pada umumnya, hanya saja robot ini
memiliki keistimewaan khusus yaitu mampu beroperasi di dalam air. Robot
ini dirancang untuk mampu bergerak di dalam air dan mampu melaksanakan
tugasnya. Robot bawah air jauh lebih kompleks daripada robot darat karena
dalam perancangannya robot bawah air harus meninjau masalah tekanan air,
arus air, dan kinematika gerak robot di bawah air, disamping masalah elektris
robot itu sendiri. Akan tetapi, permasalahan-permasalahan tersebut tidak
menyurutkan niat peneliti untuk merancang dan membuat robot bawah air
dengan berbagai kegunaan.
Robot bawah air bukanlah hal yang baru dalam dunia sains dan
teknologi. Tercatat setiap tahunnya banyak digelar berbagai lomba robot
bawah air baik yang berskala nasional maupun internasional. Hal ini
membuktikan bahwa perkembangan robot bawah air sangat pesat dan
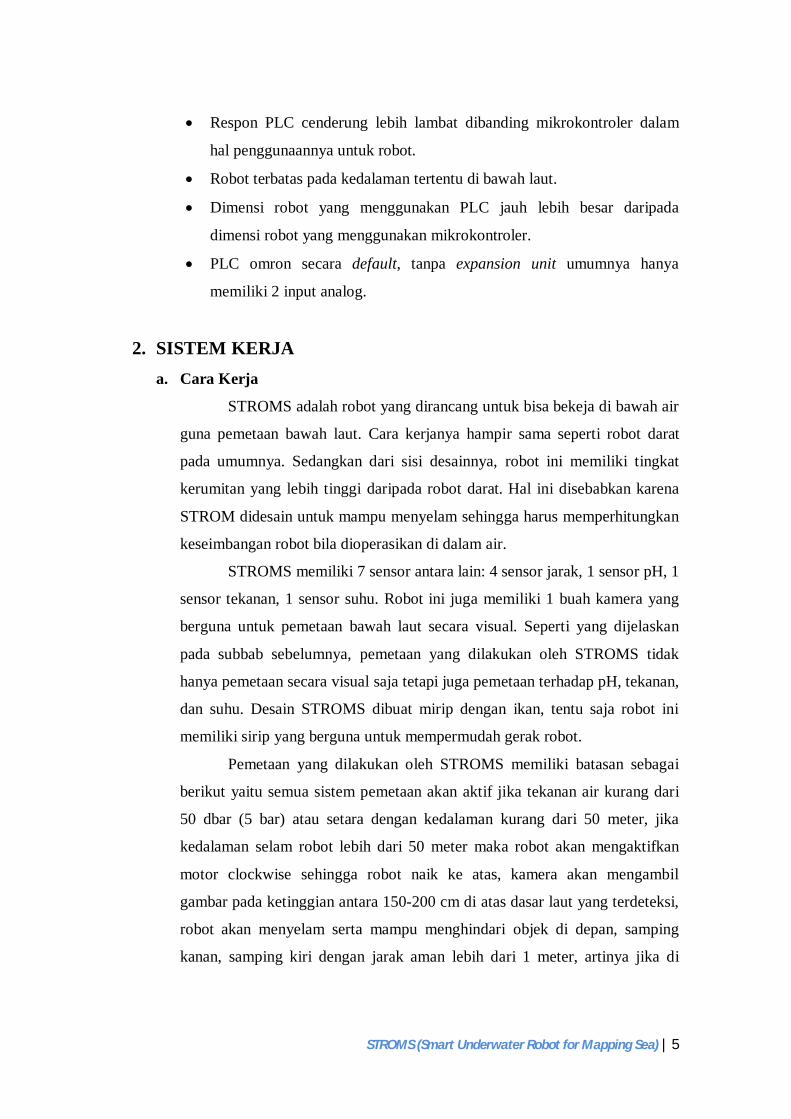
mendapat perhatian khusus dari masyarakat.
Gambar 1: Lomba Robot Bawah Air yang Digelar ITS
Sumber: its.ac.id

STROMS (Smart Underwater Robot for Mapping Sea) | 2
Robot bawah air dikembangkan untuk menggantikan posisi manusia
dalam mengeksplorasi bawah laut. Eksplorasi dalam hal ini memiliki makna
luas, mulai dari eksplorasi sederhana semacam pengamatan ekosistem bawah
laut, hingga eksplorasi berisiko tinggi seperti pengambilan sampel dasar laut
untuk mendeteksi logam tambang pada kedalaman lebih dari 1000m.
Eksplorasi seperti itu tetap dapat dilakukan tanpa perlu campur tangan
manusia langsung dalam mengeksplorasi. Dengan menggunakan robot bawah
air, manusia hanya menunggu di daratan untuk selanjutnya tugas menjelajah
bawah air dilakukan oleh robot.
Robot bawah air yang paling canggih saat ini adalah robot bawah air
yang mampu mengambil sampel bahan tambang dasar laut. Robot tersebut
dikatakan canggih karena dalam perancangan bodi robot tersebut perlu
dipertimbangkan kekuatan bodi pelindungnya, mengingat bahan tambang
dasar laut yang dikenal dengan nama deposit sulfide, terletak pada kedalaman
minimal 1000m di bawah air laut. Bisa dibayangkan bagaimana tekanan air
pada kedalam tersebut. Selan itu diperlukan aktuator yang tangguh untuk
dapat menggerakkan robot tersebut.
Robot bawah air yang paling sederhana adalah robot ikan. Dikatakan
sederhana karena robot memiliki kemampuan seperti ikan pada umumnya,
mampu berenang tidak menabrak dinding akuarium.
Gambar 2: Robot Ikan
Sumber : science.howstuffworks.com
Selanjutnya dari robot ikan yang sederhana tersebut, ditambahkan
berbagai komponen dan sensor yang bisa menambah nilai robot tersebut.

STROMS (Smart Underwater Robot for Mapping Sea) | 3
Pengembangan robot tersebut adalah diciptakannya robot bawah air yang
mampu mendeteksi polutan dalam air dengan menambahkan sensor tertentu.
Pada makalah ini robot bawah air yang dirancang adalah robot bawah
air untuk pemetaan bawah laut yang disebut dengan STROMS. STROMS
merupakan singkatan dari Smart Underwater Robot for Mapping Sea. Sesuai
dengan namanya, robot ini tergolong robot cerdas karena pemetaan yang
dilakukan oleh STROMS dalam hal ini tidak hanya pemetaan secara visual
saja tetapi juga pemetaan derajat keasamaan, suhu, dan tekanan dengan
batasan kedalam laut tertentu serta luas pemetaan tertentu. Robot dirancang
untuk dapat bermanuver dalam air, sama halnya seperti ikan yang mampu
berenang ke segala arah.
b. Jenis
Secara umum, berdasarkan sistem pengendaliannya robot bawah air
dibagi menjadi menjadi dua jenis yaitu Autonomous Underwater Vehicles
(AUV) dan Remoted Operated Vehicles (ROV). AUV adalah kendaraan
bawah air yang mampu bergerak di dalam air secara otomatis tanpa adanya
kontrol langsung dari manusia. Sedangkan ROV adalah kendaraan bawah air
yang gerakannya dikendalikan secara langsung oleh manusia melalui remote
kontrol dari atas permukaan air.
Gambar 3: ROV dikhususkan bagi proyek minyak dan gas bumi lepas pantai.
Sumber : gunadarma.ac.id

STROMS (Smart Underwater Robot for Mapping Sea) | 4
Gambar 4: AUV Pendeteksi Polutan Air
Sumber : spacewar.com
Pada makalah ini, jenis robot yang akan dirancang adalah AUV,
dimana robot tersebut dapat bergerak secara otomatis tanpa perlu
pengendalian langsung dari manusia.
c. Kelebihan dan Kekurangan
Kelebihan robot bawah air untuk pemetaan bawah laut berbasis PLC
adalah:
Pengkabelan antara PLC dengan unit input dan output mudah dan
sederhana
Pemrograman PLC lebih mudah daripada mikrokontroler.
Mampu memetakan secara visual dasar laut dalam interval tertentu.
Mampu berenang seperti ikan; ke atas, kiri, kanan, dan bawah.
Mampu menghindari objek di depan yang menghalanginya.
Mampu mendeteksi temperature, tekanan, dan derajat keasaman secara
real time.
Kekurangan robot bawah air untuk pemetaan bawah laut berbasis
PLC adalah:
Harga PLC cenderung lebih mahal daripada mikrokontroler biasa.
Input dan ouput terbatas pada jumlah port yang terdapat dalam PLC
tersebut.
STROMS (Smart Underwater Robot for Mapping Sea) | 5
Respon PLC cenderung lebih lambat dibanding mikrokontroler dalam
hal penggunaannya untuk robot.
Robot terbatas pada kedalaman tertentu di bawah laut.
Dimensi robot yang menggunakan PLC jauh lebih besar daripada
dimensi robot yang menggunakan mikrokontroler.
PLC omron secara default, tanpa expansion unit umumnya hanya
memiliki 2 input analog.
2. SISTEM KERJA a. Cara Kerja
STROMS adalah robot yang dirancang untuk bisa bekeja di bawah air
guna pemetaan bawah laut. Cara kerjanya hampir sama seperti robot darat
pada umumnya. Sedangkan dari sisi desainnya, robot ini memiliki tingkat
kerumitan yang lebih tinggi daripada robot darat. Hal ini disebabkan karena
STROM didesain untuk mampu menyelam sehingga harus memperhitungkan
keseimbangan robot bila dioperasikan di dalam air.
STROMS memiliki 7 sensor antara lain: 4 sensor jarak, 1 sensor pH, 1
sensor tekanan, 1 sensor suhu. Robot ini juga memiliki 1 buah kamera yang
berguna untuk pemetaan bawah laut secara visual. Seperti yang dijelaskan
pada subbab sebelumnya, pemetaan yang dilakukan oleh STROMS tidak
hanya pemetaan secara visual saja tetapi juga pemetaan terhadap pH, tekanan,
dan suhu. Desain STROMS dibuat mirip dengan ikan, tentu saja robot ini
memiliki sirip yang berguna untuk mempermudah gerak robot.
Pemetaan yang dilakukan oleh STROMS memiliki batasan sebagai
berikut yaitu semua sistem pemetaan akan aktif jika tekanan air kurang dari
50 dbar (5 bar) atau setara dengan kedalaman kurang dari 50 meter, jika
kedalaman selam robot lebih dari 50 meter maka robot akan mengaktifkan
motor clockwise sehingga robot naik ke atas, kamera akan mengambil
gambar pada ketinggian antara 150-200 cm di atas dasar laut yang terdeteksi,
robot akan menyelam serta mampu menghindari objek di depan, samping
kanan, samping kiri dengan jarak aman lebih dari 1 meter, artinya jika di
STROMS (Smart Underwater Robot for Mapping Sea) | 6
depan robot ada suatu objek dengan jarak kurang dari 1 meter dari robot
maka robot akan berenang menghindarinya, jika semua keadaan memenuhi
maka pemetaan akan dilakukan tiap 5 detik, tiap 5 detik juga LED di sekitar
kamera akan aktif. Pemetaan di sini berarti kamera mengambil gambar,
sensor tekanan, sensor suhu, sensor pH mengambil data.
Untuk cara kerja yang lebih jelas pada tiap-tiap komponen, akan dijelaskan
dalam subbab Gambar dan Penjelasan di bawah ini.
b. Gambar dan Penjelasan
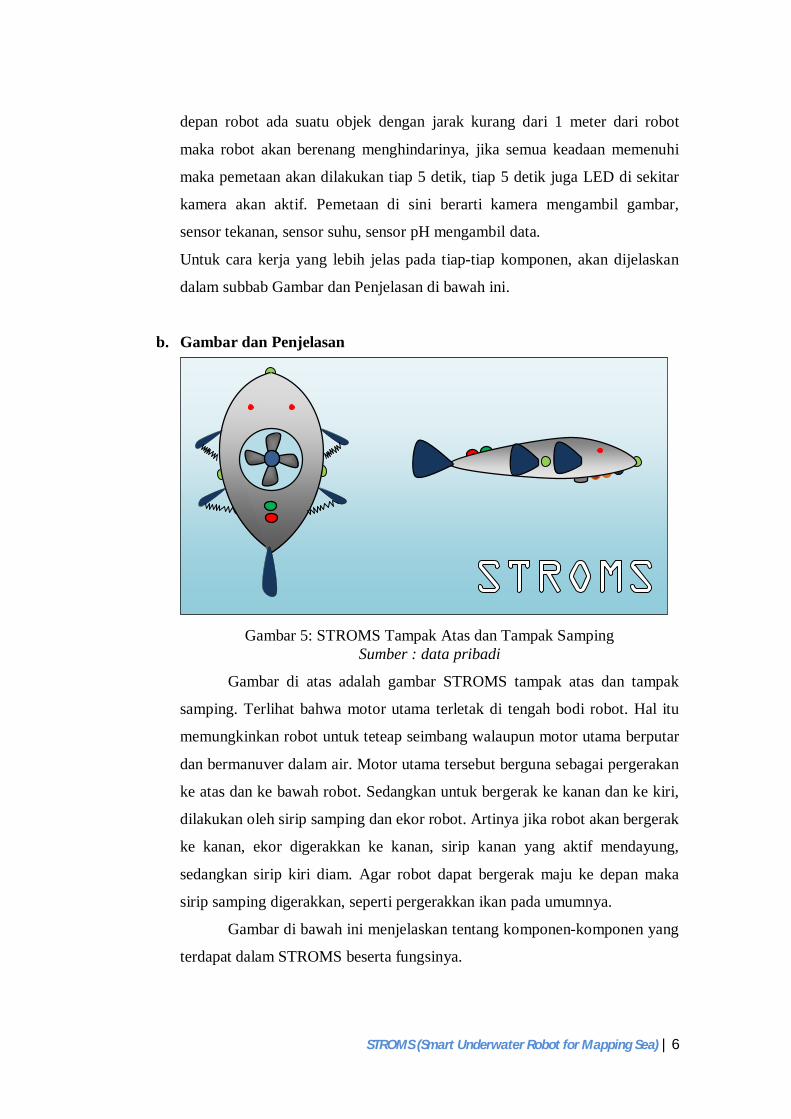
Gambar 5: STROMS Tampak Atas dan Tampak Samping
Sumber : data pribadi
Gambar di atas adalah gambar STROMS tampak atas dan tampak
samping. Terlihat bahwa motor utama terletak di tengah bodi robot. Hal itu
memungkinkan robot untuk teteap seimbang walaupun motor utama berputar
dan bermanuver dalam air. Motor utama tersebut berguna sebagai pergerakan
ke atas dan ke bawah robot. Sedangkan untuk bergerak ke kanan dan ke kiri,
dilakukan oleh sirip samping dan ekor robot. Artinya jika robot akan bergerak
ke kanan, ekor digerakkan ke kanan, sirip kanan yang aktif mendayung,
sedangkan sirip kiri diam. Agar robot dapat bergerak maju ke depan maka
sirip samping digerakkan, seperti pergerakkan ikan pada umumnya.
Gambar di bawah ini menjelaskan tentang komponen-komponen yang
terdapat dalam STROMS beserta fungsinya.

STROMS (Smart Underwater Robot for Mapping Sea) | 7
Gambar 6: STROMS tampak atas
Sumber : data pribadi
Gambar 7: STROMS tampak bawah
Sumber : data pribadi
Masing-masing komponen memiliki fungsi yang berbeda-beda. LED
indicator memiliki fungsi sebagai indicator bahwa STROMS diaktifkan.
Tombol ON OFF berfungsi untuk menghidupkan dan mematikan robot.
Sensor jarak berguna untuk mengetahui jarak robot dari objek terdekat. Sirip
digerakkan oleh pegas, dimana dalam keadaan default, sirip akan membuka.
Pegas tersebut digerakkan oleh solenoid, jadi saat solenoid dialiri arus, pegas
akan tertarik sehingga sirip bergerak menutup. Ekor digerakkan oleh motor
DC dengan sistem H-Bridge, dimana saat port direction pada motor tersebut
LED indicator
ON OFF
Sensor jarak kanan Sensor jarak depan
Sensor Tekanan air Sensor pH Sensor Suhu Kamera LED kamera Motor utama Sensor Jarak kiri
Sirip Pegas
Solenoid Motor ekor Ekor
Sensor jarak bawah

STROMS (Smart Underwater Robot for Mapping Sea) | 8
aktif, maka motor akan bergerak ke kanan brgitu juga sebaliknya. Motor
utama juga menggunakan motor DC biasa yang dapat bergerak searah jarum
jam (CW) maupun berlawanan arah dengan jarum jam (CCW). Prinsipnya
juga sama seperti motor ekor, yaitu menggunakan H-Bridge.
Gambar 8: H-Bridge 4 FET pada Motor DC
Sumber : wiki.mech.uwa.edu.au
Pada STROMS, arah motor DC dikendalikan oleh 2 kontrl, yaitu
direction dan enable. Motor DC dapat bergerak searah jarum jam jika
direction dan enable kedua-duanya berlogika 1 (aktif), sedangkan motor akan
bergerak CCW (berlawanan arah dengan jarum jam) jika direction berlogika
0 dan enable berlogika 1.
c. Urutan Langkah
Berikut ini adalah urutan langkah STROMS:
Saat tombol ON ditekan maka sistem akan aktif, led indicator aktiF
kedip-kedip dalam interval waktu 1 detik.
Saat dimasukkan ke dalam air, jika sensor jarak bawah tidak aktif maka
motor utama akan bergerak CCW sampai sensor jarak bawah aktif
(mendeteksi jarak antara robot dengan dasar laut antara 150-200 cm) dan
sensor tekanan kurang dari 50dbar.
Motor utama CW aktif saat sensor tekanan mendeteksi tekanan lebih dari
atau sama dengan 50dbar atau saat terdapat objek di depan robot yang
menghalangi robot bergerak maju (sensor jarak depan aktif mendeteksi
objek dalam jarak kurang dari 100 cm), dan atau saat sensor suhu
mendeteksi suhu di atas 70 derajat celcius.

STROMS (Smart Underwater Robot for Mapping Sea) | 9
Solenoid kanan dan kiri aktif saat sensor jarak depan tidak aktif (tidak
mendeteksi objek dalam jarak 100 cm), sensor jarak bawah aktif
(mendeteksi jarak antara robot dengan dasar laut antara 150-200 cm), dan
sensor tekanan tidak aktif.
Solenoid kanan aktif, motor ekor CW, sedangkan solenoid kiri tidak aktif
saat robot akan berbelok ke kanan, yaitu saat sensor samping kiri aktif
(mendeteksi objek dalam jarak kurang dari 100 cm) dan sensor jarak
depan tidak aktif.
Solenoid kiri aktif, motor ekor CCW, sedangkan solenoid kanan tidak
aktif saat robot akan berbelok ke kiri, yaitu saat sensor samping kanan
aktif (mendeteksi objek dalam jarak kurang dari 100 cm) dan sensor jarak
depan tidak aktif.
Kamera dan LED kamera aktif dan mengambil gambar setiap 5 detik
ketika sensor tekanan mendeteksi tekanan kurang dari 50 dbar, sensor
jarak kanan dan kiri tidak aktif, sensor jarak depan tidak aktif, sensor
bawah mendeteksi jarak antar 150-200 cm.
Ketika pengambilan gambar mencapai 100 kali maka otomatis STROMS
akan bergerak ke permukaan (Motor CW aktif).
3. INISIALISASI I/O INPUT OUTPUT
000.00 ON 100.00 M_UTAMAEN
000.01 OFF 100.01 M_UTAMADIR
A448 S_JARAKDE 100.02 M_EKOREN
A449 S_JARAKKA 100.03 M_EKORDIR
A959 S_JARAKKI 100.04 SOLE_KA
A958 S_JARAKBA 100.05 SOLE_KI
A957 S_TEKANAN 100.06 LED_IND
A956 S_PH 100.07 LED_CAM
A955 S_SUHU 100.10 CAMERA
STROMS (Smart Underwater Robot for Mapping Sea) | 10
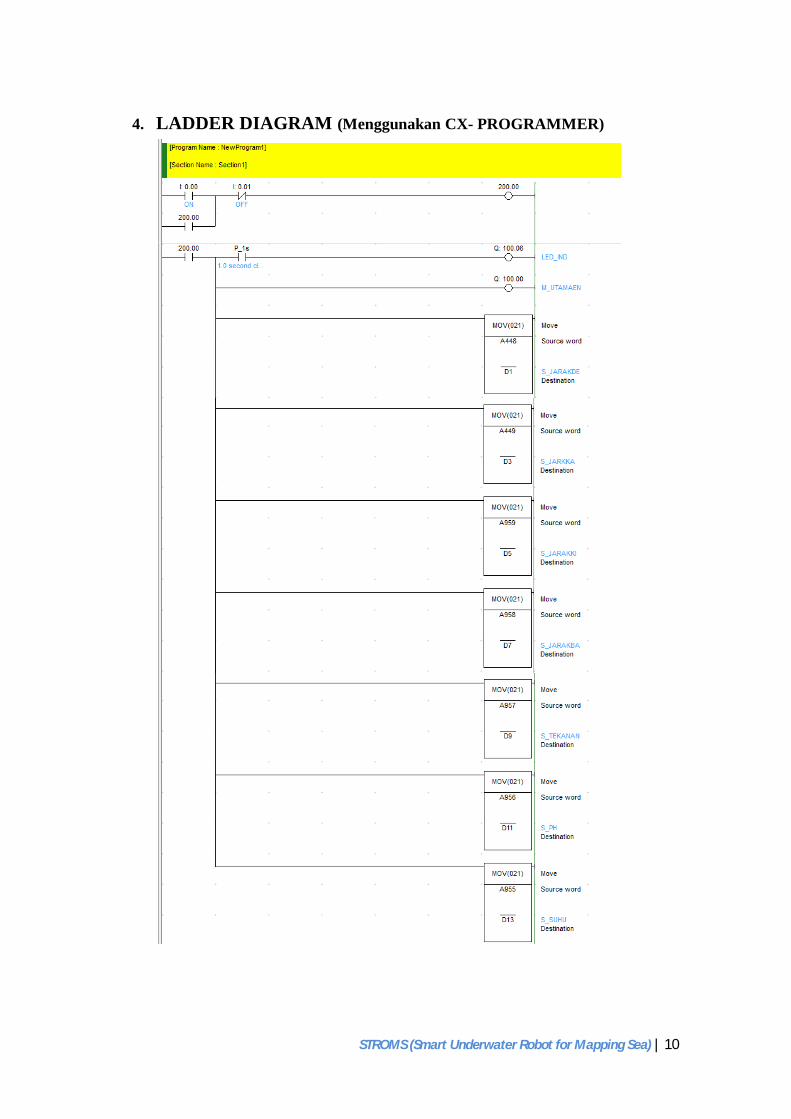
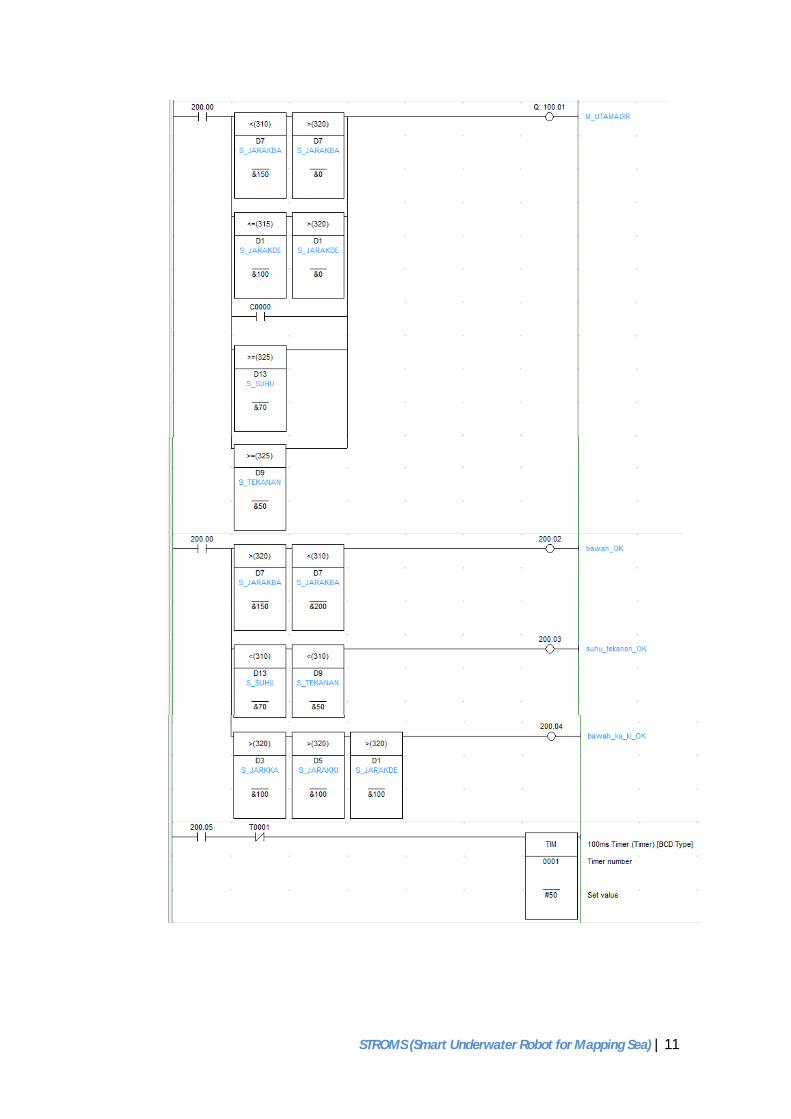
4. LADDER DIAGRAM (Menggunakan CX- PROGRAMMER)
STROMS (Smart Underwater Robot for Mapping Sea) | 11

STROMS (Smart Underwater Robot for Mapping Sea) | 12

STROMS (Smart Underwater Robot for Mapping Sea) | 13
5. SIMULASI Saat tombol ON ditekan
Led Indikator nyala 1 detik, mati 1 detik, dst.
Motor utama enable aktif motor utama
berputar ke kiri

STROMS (Smart Underwater Robot for Mapping Sea) | 14
Mengganti isi yang terdapat pada address yang memmuat masing-masing
sensor sehingga STROMS berada pada keadaan siap melakukan pemetaan
Sensor jarak bawah diatur agar jarak antar 150-200cm
Kemudian semua memori indicator OK berlogika 1.
STROMS (Smart Underwater Robot for Mapping Sea) | 15
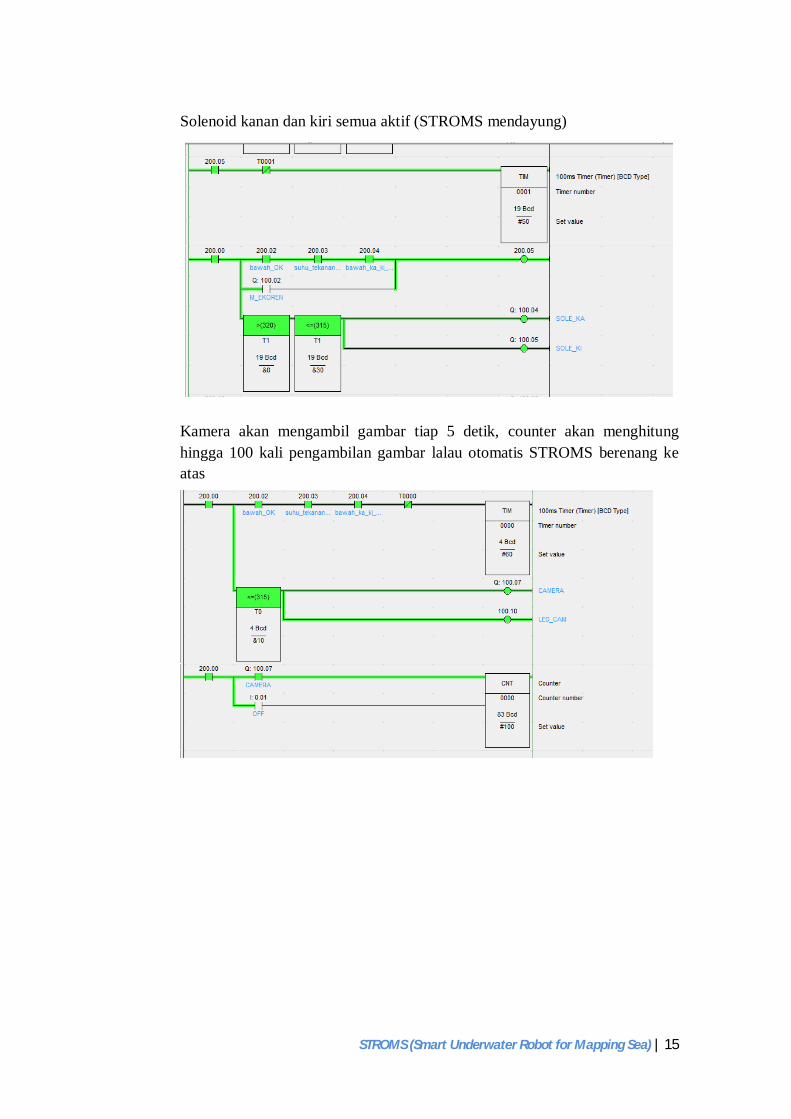
Solenoid kanan dan kiri semua aktif (STROMS mendayung)
Kamera akan mengambil gambar tiap 5 detik, counter akan menghitung hingga 100 kali pengambilan gambar lalau otomatis STROMS berenang ke atas
STROMS (Smart Underwater Robot for Mapping Sea) | 16
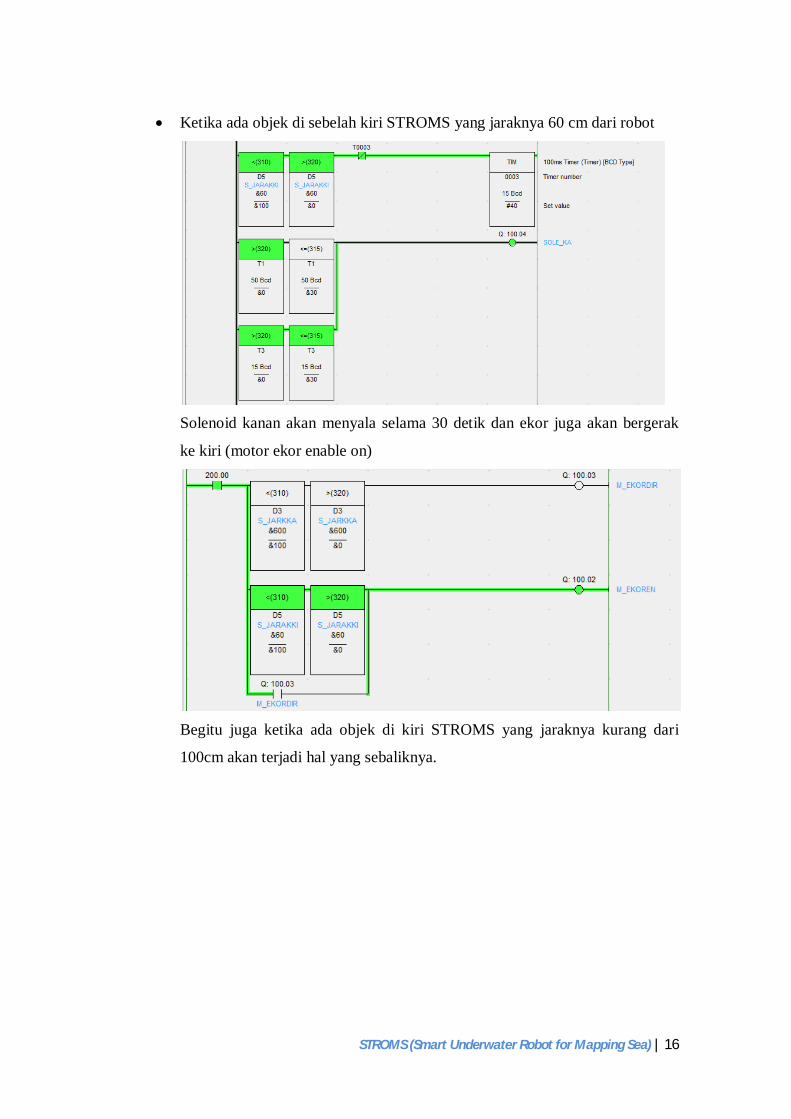
Ketika ada objek di sebelah kiri STROMS yang jaraknya 60 cm dari robot
Solenoid kanan akan menyala selama 30 detik dan ekor juga akan bergerak
ke kiri (motor ekor enable on)
Begitu juga ketika ada objek di kiri STROMS yang jaraknya kurang dari
100cm akan terjadi hal yang sebaliknya.

STROMS (Smart Underwater Robot for Mapping Sea) | 17
Ketika tekanan lebih dari 50dbar, atau keadaan lain yang tidak sesuai dengan
keadaan robot saat siap melakukan pemetaan.
Motor utama akan bergerak ke kanan (naik).

STROMS (Smart Underwater Robot for Mapping Sea) | 18
6. KESIMPULAN Berdasarkan simulasiyang telah dilakukan pada software CX-Programmer
maka dapat disimpulkan bahwa:
STROMS termasuk robot bawah air jenis AUV
Dalam pembuatan ladder programnya, STROMS terdiri atas 9 input dan 9
output.
Ladder program yang dibuat dapat disimulasikan dengan baik.
7. SARAN Robot bawah air adalah robot yang masih belum banyak dikembangkan di
Indonesia padahal kegunaan robot ini begitu luas jika mampu dikembangkan
dengan baik. Indonesia termasuk Negara maritime yang luas perairannya lebih
besar daripada luas daratan, karena itu pengembangan robot bawah air sangat
perlu diadakan di Indonesia guna pemantauan dasar laut.
Dalam implementasinya sendiri, STROMS masih memiliki banyak
kekurangan terutama kemampuan untuk kembali ke titik awal dimana robot
tersebut dinyalakan.

STROMS (Smart Underwater Robot for Mapping Sea) | 19
Daftar Pustaka
Feby, Fattah. 2009. Robot Bawah Air Lebih Efisien. (Online :
http://robotika.blog.gunadarma.ac.id/?cat=7, diakses tanggal 4 Desember 2012).
Lamb, Robert. 2012. Can Robot Fish Find Pollution? (Online:
http://science.howstuffworks.com/environmental/green-tech/remediation/robot-
fish.htm, diakses tanggal 4 Desember 2012)
Maryati. 2012. Ilmuwan Uji Coba Robot Ikan Pemantau Polusi. (Online:
http://www.antaranews.com/berita/312044/ilmuwan-uji-coba-robot-ikan-pemantau-
polusi, diakses tanggal 4 Desember 2012).
No name. 2010. Drive a Motor Using a Pulse Width Modulated Signal (Online:
http://wiki.mech.uwa.edu.au/index.php/Micro_crash_course/pwm, diakses tanggal 19
Desember 2012).
No name. Robot Jelajah Bawah Air. (Online: http://robotjelajah.innov.ipb.ac.id/,
diakses tanggal 4 Desember 2012).
Staff Writer. 2007. Biologically Inspired Sensors Can Augment Sonar, Vision System
In Submarines. (Online: http://www.spacewar.com/reports/
Biologically_Inspired_Sensors_Can_Augment_Sonar_Vision_System_In_Submarin
es_999.html, diakses tanggal 4 Desember 2012)


















