Stable and Robust Fuzzy Control for Uncertain Nonlinear ... · Stable and Robust Fuzzy Control for...
16
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 825 Stable and Robust Fuzzy Control for Uncertain Nonlinear Systems H. K. Lam, F. H. F. Leung, and P. K. S. Tam Abstract—This paper presents the stability and robustness analysis for multivariable fuzzy control systems subject to parameter uncertainties based on a single-grid-point (SGP) approach. To perform the analysis, we represent a multivariable nonlinear system using a TS-fuzzy plant model. Three design approaches of fuzzy controllers are introduced to close the feedback loop. By estimating the matrix measures of the system parame- ters and parameter uncertainties, stability and robustness conditions for different cases are derived. Application examples will be given to show the design procedures and the merits of the proposed fuzzy controller. Index Terms—fuzzy control, nonlinear system robustness, parameter un- certainty, stability. I. INTRODUCTION Control of nonlinear systems is a difficult problem because we do not have systematic ways to find a necessary and sufficient stability condi- tion, and to guarantee good robustness and performance. The problem becomes more complex when some parameters of the plant are uncer- tain. Fuzzy control is one of the techniques to deal with this class of systems. Many successful applications of fuzzy control in industrial processes [1]–[3] and domestic products have been reported. We can classify the studies on fuzzy control systems into three approaches, namely, model-free, mathematical model, and fuzzy model approaches. The model-free approach, as its name tells, does not require a model for the plant. A fuzzy controller for the complex plant is obtained by incorporating human experience or expert knowl- edge into a fuzzy controller through some linguistic rules [1]–[3]. This process makes the design simple and the linguistic rules make the control process to be understood easily. However, the heuristic design comes without considering the system stability, robustness and performance. To realize a systematic design process, neural and neural-fuzzy networks were employed to construct the fuzzy controllers. By using some training algorithms [16], [17], [20], [21] [56], parameters of the fuzzy controller can be obtained automatically. Although this design process is systematic, the global closed-loop system stability may not be guaranteed and the training process is quite time consuming. Stability conditions of the neural-network and neural-fuzzy control systems can be found in [29], [30], and [57]. A fuzzy PID controller was also proposed to control a plant based on the model-free approach. This fuzzy PID controller takes the output error, derivative of the output error and the integral of the output error as the inputs. Prior knowledge of the plant is not required. Under a particular design of the membership functions, a fuzzy PID controller is proved to be equivalent to a conventional PID controller [18], [19], [26], or a nonlinear PID controller [7]. Some methodologies on tuning adaptive fuzzy PI, PD, and PID controllers can be found in [9], [27], [31], [77], and [78]. Based on the model-free approach, most of the studies were Manuscript received April 19, 1997; revised July 11, 2000. This work was supported by a research grant from The Hong Kong Polytechnic University (Project G-V264). This paper was recommended by Associate Editor T. Sud- kamp. The authors are with Department of Electronic and Information Engineering, The Hong Kong Polytechnic University, Hung Hom, Kowloon, Hong Kong (e-mail: [email protected]). Publisher Item Identifier S 1083-4427(00)09031-7. on obtaining the fuzzy controllers, while the stability and robustness of the closed-loop system are seldom considered. For the mathematical model approach, the closed-loop system is an- alyzed based on a mathematical model of the plant. The closed-loop system stability of Fuzzy PI, PD, and PID control systems were ana- lyzed by using the small gain theorem [11], [28], [59]. Adaptive tech- niques were applied in the design of fuzzy controllers [10], [12], [32], [40], [63], [79], [80], [83]. The shapes of the membership functions of the fuzzy controller were adjusted according to the adaptive rule de- rived based on the mathematical model of the plant. Model-reference adaptive [22], [60], [81] and self-organizing adaptive [33] fuzzy control approach were also reported. By applying adaptive fuzzy controllers, the stability of the closed-loop system is usually guaranteed, and the system is robust to the parameter uncertainties. However, the computa- tional demand and the complexity of the adaptive fuzzy controller are always high. The robust sliding mode control technique was also ap- plied in designing the fuzzy controllers. Based on sliding mode control theory [5], the stability can be guaranteed and the system is robust to parameter uncertainties within given bounds. The fuzzy sliding mode controller behaves like a conventional sliding mode controller with a boundary layer about the sliding plane [13], [23], [41], [61], when the discontinuous control signal is replaced by a fuzzy gain. The chattering problem of the control signal is reduced under this case. However, this fuzzy sliding mode controller suffers from a finite steady state error due to the boundary layer. To alleviate the chattering problem and eliminate the finite steady state error, some fuzzy tuning algorithms [35], [42], and adaptive techniques [14], [34] were introduced to the fuzzy sliding mode controller. Other stability analyses can be found in [43], [62], and [91]. It can be seen that the studies of the fuzzy control system based on the mathematical model approach were mainly on the system sta- bility and other system characteristics through combining conventional control theories with fuzzy logic. Under the fuzzy-model based approach, system analysis is carried out via a fuzzy plant model. One well-known fuzzy plant model is the TS-fuzzy plant model [4]. There are two ways to obtain the TS-fuzzy plant model of a nonlinear system. First, we can convert the mathematical model of the nonlinear system into a TS-fuzzy plant model directly using, for example, the method in [36]. Second, we can obtain TS-fuzzy plant model using some system identification or modeling techniques [4], [6], [24], [44], [45], [82]. The TS-fuzzy plant model expresses the nonlinear system as a weighted sum of some simple sub-systems. This special structure of the TS-fuzzy plant model facilitates the analysis of the systems. Because the TS-fuzzy plant model gives a standard form for general nonlinear systems, the analysis can be carried out systematically. Moreover, as the sub-systems of the TS-fuzzy plant model are usually linear systems, some linear design techniques can be applied for the fuzzy controller, which is a weighted sum of many sub-controllers. PID controller is used as the sub-controller in [58], [64]–[66]. It can be shown that this kind of fuzzy controller is a nonlinear PID controller. Sufficient stability conditions were derived by using the Lyapunov’s method [58]. Fuzzy controllers using linear state feedback controllers as sub-controllers were also reported. A sufficient stability condition was derived based on the Lyapunov direct method [37], [67], [86]. Stability analysis of discrete-time fuzzy state feedback controller can be found in [8], [25], [38], [46]–[48], [72], [73], and [85]. Linear matrix inequality (LMI) techniques were also employed to analyze the system numerically [74]–[76], [87]. Adaptive [39], [53], [68], [84], [90] and sliding mode [69] techniques were applied to design this kind of fuzzy controller. As mentioned early, these two techniques will inevitably increase the computational demand and complexity of the controller. Robustness analysis results for fuzzy control systems based on the fuzzy model based 1083–4427/00$10.00 © 2000 IEEE Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.
Transcript of Stable and Robust Fuzzy Control for Uncertain Nonlinear ... · Stable and Robust Fuzzy Control for...

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 825
Stable and Robust Fuzzy Control for UncertainNonlinear Systems
H. K. Lam, F. H. F. Leung, and P. K. S. Tam
Abstract—This paper presents the stability and robustness analysis formultivariable fuzzy control systems subject to parameter uncertaintiesbased on a single-grid-point (SGP) approach. To perform the analysis, werepresent a multivariable nonlinear system using a TS-fuzzy plant model.Three design approaches of fuzzy controllers are introduced to close thefeedback loop. By estimating the matrix measures of the system parame-ters and parameter uncertainties, stability and robustness conditions fordifferent cases are derived. Application examples will be given to show thedesign procedures and the merits of the proposed fuzzy controller.
Index Terms—fuzzy control, nonlinear system robustness, parameter un-certainty, stability.
I. INTRODUCTION
Control of nonlinear systems is a difficult problem because we do nothave systematic ways to find a necessary and sufficient stability condi-tion, and to guarantee good robustness and performance. The problembecomes more complex when some parameters of the plant are uncer-tain. Fuzzy control is one of the techniques to deal with this class ofsystems. Many successful applications of fuzzy control in industrialprocesses [1]–[3] and domestic products have been reported.
We can classify the studies on fuzzy control systems into threeapproaches, namely, model-free, mathematical model, and fuzzymodel approaches. The model-free approach, as its name tells, doesnot require a model for the plant. A fuzzy controller for the complexplant is obtained by incorporating human experience or expert knowl-edge into a fuzzy controller through some linguistic rules [1]–[3].This process makes the design simple and the linguistic rules makethe control process to be understood easily. However, the heuristicdesign comes without considering the system stability, robustnessand performance. To realize a systematic design process, neuraland neural-fuzzy networks were employed to construct the fuzzycontrollers. By using some training algorithms [16], [17], [20], [21][56], parameters of the fuzzy controller can be obtained automatically.Although this design process is systematic, the global closed-loopsystem stability may not be guaranteed and the training process isquite time consuming. Stability conditions of the neural-network andneural-fuzzy control systems can be found in [29], [30], and [57]. Afuzzy PID controller was also proposed to control a plant based on themodel-free approach. This fuzzy PID controller takes the output error,derivative of the output error and the integral of the output error as theinputs. Prior knowledge of the plant is not required. Under a particulardesign of the membership functions, a fuzzy PID controller is provedto be equivalent to a conventional PID controller [18], [19], [26], or anonlinear PID controller [7]. Some methodologies on tuning adaptivefuzzy PI, PD, and PID controllers can be found in [9], [27], [31], [77],and [78]. Based on the model-free approach, most of the studies were
Manuscript received April 19, 1997; revised July 11, 2000. This work wassupported by a research grant from The Hong Kong Polytechnic University(Project G-V264). This paper was recommended by Associate Editor T. Sud-kamp.
The authors are with Department of Electronic and Information Engineering,The Hong Kong Polytechnic University, Hung Hom, Kowloon, Hong Kong(e-mail: [email protected]).
Publisher Item Identifier S 1083-4427(00)09031-7.
on obtaining the fuzzy controllers, while the stability and robustnessof the closed-loop system are seldom considered.
For the mathematical model approach, the closed-loop system is an-alyzed based on a mathematical model of the plant. The closed-loopsystem stability of Fuzzy PI, PD, and PID control systems were ana-lyzed by using the small gain theorem [11], [28], [59]. Adaptive tech-niques were applied in the design of fuzzy controllers [10], [12], [32],[40], [63], [79], [80], [83]. The shapes of the membership functions ofthe fuzzy controller were adjusted according to the adaptive rule de-rived based on the mathematical model of the plant. Model-referenceadaptive [22], [60], [81] and self-organizing adaptive [33] fuzzy controlapproach were also reported. By applying adaptive fuzzy controllers,the stability of the closed-loop system is usually guaranteed, and thesystem is robust to the parameter uncertainties. However, the computa-tional demand and the complexity of the adaptive fuzzy controller arealways high. The robust sliding mode control technique was also ap-plied in designing the fuzzy controllers. Based on sliding mode controltheory [5], the stability can be guaranteed and the system is robust toparameter uncertainties within given bounds. The fuzzy sliding modecontroller behaves like a conventional sliding mode controller with aboundary layer about the sliding plane [13], [23], [41], [61], when thediscontinuous control signal is replaced by a fuzzy gain. The chatteringproblem of the control signal is reduced under this case. However, thisfuzzy sliding mode controller suffers from a finite steady state error dueto the boundary layer. To alleviate the chattering problem and eliminatethe finite steady state error, some fuzzy tuning algorithms [35], [42],and adaptive techniques [14], [34] were introduced to the fuzzy slidingmode controller. Other stability analyses can be found in [43], [62], and[91]. It can be seen that the studies of the fuzzy control system basedon the mathematical model approach were mainly on the system sta-bility and other system characteristics through combining conventionalcontrol theories with fuzzy logic.
Under the fuzzy-model based approach, system analysis is carriedout via a fuzzy plant model. One well-known fuzzy plant model is theTS-fuzzy plant model [4]. There are two ways to obtain the TS-fuzzyplantmodelofanonlinearsystem.First,wecanconvert themathematicalmodel of the nonlinear system into a TS-fuzzy plant model directlyusing, for example, the method in [36]. Second, we can obtain TS-fuzzyplant model using some system identification or modeling techniques[4], [6], [24], [44], [45], [82]. The TS-fuzzy plant model expresses thenonlinear system as a weighted sum of some simple sub-systems. Thisspecial structure of the TS-fuzzy plant model facilitates the analysis ofthesystems.Because the TS-fuzzy plantmodelgivesastandard form forgeneralnonlinearsystems, theanalysiscanbecarriedoutsystematically.Moreover, as the sub-systems of the TS-fuzzy plant model are usuallylinear systems, some linear design techniques can be applied for thefuzzy controller, which is a weighted sum of many sub-controllers.PID controller is used as the sub-controller in [58], [64]–[66]. It can beshown that this kind of fuzzy controller is a nonlinear PID controller.Sufficient stability conditions were derived by using the Lyapunov’smethod [58]. Fuzzy controllers using linear state feedback controllers assub-controllers were also reported. A sufficient stability condition wasderived based on the Lyapunov direct method [37], [67], [86]. Stabilityanalysis of discrete-time fuzzy state feedback controller can be found in[8], [25], [38], [46]–[48], [72], [73], and [85]. Linear matrix inequality(LMI) techniqueswerealsoemployed toanalyze thesystemnumerically[74]–[76], [87]. Adaptive [39], [53], [68], [84], [90] and sliding mode[69] techniques were applied to design this kind of fuzzy controller.As mentioned early, these two techniques will inevitably increase thecomputational demand and complexity of the controller. Robustnessanalysisresults for fuzzycontrolsystemsbasedonthefuzzymodelbased
1083–4427/00$10.00 © 2000 IEEE
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

826 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
approach were relatively hard to find in the literature. We derived therobustness conditions based on the Lyapunovstability theory reported in[49]–[52], and by estimating the matrix measures of the system parame-ters and the parameter uncertainties reported in [54], [55], [71], and [89].control theory [36], and sliding mode control theory [70] wereemployedtoanalyze therobustnessof thefuzzycontrolsystem.
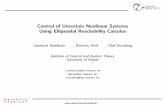
In this paper, we concentrate on the fuzzy model based approach, andreport a general analysis for fuzzy model based control systems subjectto parameter uncertainties. A stable and robust single-grid-point (SGP)fuzzy controller is proposed. The idea of this SGP approach is shownin Fig. 1 which shows a system with two uncertain parametersa andb.The dot at the center of the circle denotes the nominal plant parameters(the SGP) of the fuzzy control system of which the plant is representedby a TS-fuzzy plant model. According to the nominal parameters, astable and robust SGP fuzzy controller will be designed based on theTS-fuzzy plant model to close the feedback loop. The system stabilityis guaranteed by this SGP fuzzy controller if the uncertain parametersare inside a robust area denoted by the circle. We shall derive the sta-bility conditions of the fuzzy control system, and the robustness condi-tions that define the robust area. Through a general and systematic sta-bility and robustness analysis, a procedure for finding SGP fuzzy con-trollers can be obtained. Compare with other works on robust controlsuch as the fuzzy sliding mode control technique [13], [32], adaptiveH1, fuzzy control technique [32], self-tuning fuzzy control technique[77], our approach is simpler and easier to understand, and the struc-ture of the fuzzy controller is not so complicated.
This paper is organized as follows. In Section II, the TS-fuzzy plantmodel and the fuzzy controller will be introduced. In Section III, threedesign approaches, namely, general design approach, parallel designapproach and simplified design approach will be proposed to close thefeedback loop. Stability and robustness analyses will then be carriedout for the fuzzy control system, and the results for different approacheswill be presented. The stability and robustness conditions will be de-rived by estimating the matrix measures of the system matrices of thelinear sub-systems in the consequent parts of the fuzzy rules, and thenorms of the parameter uncertainties. In Section IV, the finding of thestability and robustness conditions under different design approacheswill be formulated into a nonlinear matrix inequality (NMI) (generalcase) and LMI (special case) [15] problems. Section V summarizes theprocedures for fnding the SGP fuzzy controller. In Section VI, applica-tion examples will be given to illustrate the stabilizability and robust-ness property of the proposed SGP fuzzy controller. In Section VII, aconclusion will be drawn.
II. TS-FUZZY PLANT MODEL AND FUZZY CONTROLLER
Consider an uncertain multivariable nonlinear fuzzy control systemcomprising a TS-fuzzy plant model with parameter uncertainties, anda fuzzy controller closing the feedback loop.
Fig. 1. Idea of the SGP approach.
A. TS-Fuzzy Plant Model with Parameter Uncertainties
Letp be the number of fuzzy rules describing the uncertain nonlinearplant. Theith rule is of the following format:
Rulei: IF f1(x(t)) is Mi1 AND � � �AND f(x(t)) is Mi
THEN _x(t) = (Ai +�Ai)x(t) + (Bi +�Bi)u(t)
(1)
where Mi� is a fuzzy term of rulei corresponding to the function,f�(x(t)), � = 1; 2; � � � ;, i = 1; 2; � � � ; p, is a positive integer;�Ai 2 <
n�n and�Bi 2 <n�m are the uncertainties of the con-
stant system matricesAi 2 <n�n andBi 2 <
n�m, respectively;x(t) 2 <
n�1 is the system state vector andu(t) 2 <m�1 is the input
vector. The plant dynamics is then described by
_x(t) =
p
i=1
wi(x(t)) [(Ai +�Ai)x(t) + (Bi +�Bi)u(t)] (2)
where (see (3) and (4) at the bottom of the page) is a nonlinear functionof x(t) and�M (f�(x(t))) is the membership function correspondingto Mi
�.
B. Fuzzy Controller
A fuzzy controller withc fuzzy rules is to be designed for the plant.Thejth rule of the fuzzy controller is of the following format:
Rulej: IF g1(x(t)) is Nj1
AND � � � ANDg(x(t)) is Nj
THENu(t) = Gjx(t) + r (5)
where Nj� is a fuzzy term of rulej corresponding to the functiong�(x(t)), � = 1; 2; � � � ;, j = 1; 2; � � � ; c, is a positive integer;
p
i=1
wi(x(t)) = 1; wi(x(t)) 2 [0; 1] for all i (3)
wi(x(t)) =�M
(f1(x(t)))� �M
(f2(x(t)))� � � � � �M
(f(x(t)))p
k=1
(�M
(f1(x(t)))� �M
(f2(x(t)))� � � � � �M
(f(x(t)))
(4)
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 827
Gj 2 <m�n is the feedback gain of rulej, r 2 <
n�1 is the referenceinput vector (set-point). The inferred output of the fuzzy controller isgiven by
u(t) =
c
j=1
mj(x(t)) (Gjx(t) + r) (6)
where (see (7) and (8) at the bottom of the page) is a nonlinear functionof x(t)and�
N(g�(x(t))) is the membership function corresponding
to Nj
� .Substituting (6) into (2), a closed-loop fuzzy control system with
uncertain plant parameters can be formed. In this section, we shall an-alyze the stability and robustness of such an uncertain fuzzy controlsystem. Three design approaches of the fuzzy controller, namely, gen-eral design approach [50], parallel design approach [37], and simplifieddesign approach [50], can be used to close the feedback loop.
C. General Design Approach (GDA)
General design approach (GDA) allows differences in the numberof rules and the rule antecedents between the TS-fuzzy plant modeland the fuzzy controller. This approach gives the largest freedom onfinding the fuzzy controller. More importantly, as the fuzzy controller(which depends onmj(x(t))) is not affected by the membership func-tion values of the TS-fuzzy plant model (wi(x(t))), the TS-fuzzy plantmodel membership functions can be unknown or uncertain, as long asthey satisfy the condition (3). This is an inherent robustness propertiesof GDA. In order to carry out the analysis, the closed-loop fuzzy systemshould be obtained first. From (2) and (6), the fuzzy control system isgiven by
_x(t) =
p
i=1
c
j=1
wi(x(t))mj(x(t))
� [(Hij +�Hij)x(t) + (Bi +�Bi)r] (9)
where
Hij = Ai +BiGj (10)
�Hij = �Ai +�BiGj : (11)
D. Parallel Design Approach (PDA)
Parallel design approach (PDA) uses the same number of rules (p)and rule antecedents of the TS-fuzzy plant model to design the fuzzycontroller. Hence, some of the terms in (9) can be grouped together.The number of terms of the closed-loop system isp(p+ 1)=2 insteadof p�c for GDA. This makes the stability criterion to be satisfied moreeasily. The fuzzy control system is given by
_x(t) =
p
i=1
wi(x(t)) [wi(x(t)) (Hii +�Hii)x(t)
+ (Bi +�Bi)r] + 2
p
i<j
wi(x(t))wj(x(t))
� (Jij +�Jij)x(t) (12)
whereJij =
Hij +Hji
2; �Jij =
�Hij +�Hji
2(13)
Hij = Ai +BiGj �Hij = �Ai +�BiGj : (14)
E. Simplified Design Approach (SDA)
Simplified design approach (SDA) requires that the sub-system in-side the fuzzy control system has a common input matrixB, and thefuzzy controller has the same number of rules and rule antecedents asthose of the TS-fuzzy plant model. The number of summation termsof the fuzzy control system is further reduced top. The fuzzy controlsystem is given by
_x(t) =
p
j=1
wj(x(t)) [(Hj +�Hj)x(t) + (B+�B)r] (15)
whereHj = Aj +BGj (16)
�Hj = �Aj +�BGj : (17)It should be noted that in order to simplify (9) to (15), either one of thefollowing conditions should hold:
Bj = B; �Bj = �B (18)or
p
j=1
wj(x(t))Bj = B;
p
j=1
wj(x))�Bj = �B: (19)
In (18),B is a constant matrix. In (19),B = B(x(t)) and�B =�B(x(t)) vary during the operation aswj(x(t)) in each rule varies.Still, in both cases, whenGj is designed such thatHj = Aj+BGj =Hwhich is a constant matrix for allj, and the system has no parameteruncertainty (i.e.,�Aj = �Bj = �Hj = 0 for all j), a linearclosed-loop system can be obtained. If (18) holds, the linear systemis obtained by feedback compensation (i.e., pole placement technique);otherwise, it is obtained by feedback linearization with respect to linearsub-systems satisfying (19). The structure of the fuzzy controller for thelatter case is more complicated than that of the former case.
In summary, every design approach has its own advantages. GDA isapplicable to those TS-fuzzy plant models with unknown membershipfunctions and/or the number of rules of the fuzzy controller is differentfrom that of the TS-fuzzy plant model. When the membership func-tions are known and the same rule antecedents of the TS-fuzzy plantmodel are used in the fuzzy controller, PDA allows the stability cri-terion to be satisfied more easily as compared with GDA. When eachsubsystem of the plant model can be compensated to become a commonlinear system using a suitable control law, SDA is recommended. Theresulting closed-loop system will then become a linear system whenthe plant has no parameter uncertainty.
III. STABILITY AND ROBUSTNESSANALYSES OFUNCERTAIN FUZZY
CONTROL SYSTEMS
In the following paragraph, we proceed to the stability and robust-ness analyses with reference to an uncertain fuzzy control system
c
j=1
mj(x(t)) = 1; mj(x(t)) 2 [0; 1] for all j (7)
mj(x(t)) =�N
(g1(x(t)))� �N
(g2(x(t)))� � � � � �N
(g(x(t)))
c
k=1
(�N
(g1(x(t)))� �N
(g2(x(t)))� � � � � �N
(g(x(t))))
(8)
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

828 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
under GDA. The analysis procedures for uncertain fuzzy controlsystems under PDA and SDA are similar to those under GDA, and theresults will be given without proof. Consider the Taylor series
x(t+�t) = x(t) + _x(t)�t+ o(�t) (20)whereo(�t) = �x(t) � _x(t)�t + x(t + �t) is the error term and�t > 0
lim�t!0
ko(�t)k
�t= 0: (21)
From (9) and (20), writingwi(x(t)) aswi andmj(x(t)) asmj , andmultiplying a transformation matrixT 2 <n�n of rankn to both sides,we have
Tx(t+�t) = Tx(t) +
p
i=1
c
j=1
wimj [T(Hij +�Hij)x(t)
+T(Bi +�Bi)r]�t+To(�t)
= I+
p
i=1
c
j=1
wimjTHijT�1�t Tx(t)
+
p
i=1
c
j=1
wimj[T�Hijx(t)
+T(Bi +�Bi)r]�t+To(�t):
The reason for introducingT will be given at the end of this section.Taking norm on both sides of the above equation, we have
kTx(t+�t)k �
p
i=1
c
j=1
wimj(I+THijT�1�t)
� kTx(t)k+
p
i=1
c
j=1
wimj
� [T�Hijx(t) +T(Bi +�Bi)r]�t
+ kTo(�t)k (22)
wherek � k denotes thel2 norm for vectors andl2 induced norm formatrices. From (22),
kTx(t+�t)k
�
p
i=1
c
j=1
wimjkI+THijT�1�tk kTx(t)k
+
p
i=1
c
j=1
wimj [T�Hijx(t) +T(Bi +�Bi)r]�t
+ kTo(�t)k
) kTx(t+�t)k � kTx(t)k
�
p
i=1
c
j=1
wimj(kI+THijT�1�tk � 1)
� kTx(t)k+
p
i=1
c
j=1
wimj[T�Hijx(t)
+T(Bi +�Bi)r]�t + kTo(�t)k
) lim�t!0
kTx(t+�t)k � kTx(t)k
�t
� lim�t!0
p
i=1
c
j=1
wimj
� (kI+THijT�1�tk � 1)kTx(t)k
+
p
i=1
c
j=1
wimj[T�Hijx(t)
+T(Bi +�Bi)r]�t + kTo(�t)k �t: (23)
From (21) and (23),
dkTx(t)k
dt� lim
�t!0
p
i=1
c
j=1
wimj(kI+THijT�1�tk � 1)
�t
� kTx(t)k+
p
i=1
c
j=1
wimj
+ [T�Hijx(t) +T(Bi +�Bi)r]
�
p
i=1
c
j=1
wimj�[THijT�1] kTx(t)k
+
p
i=1
c
j=1
wimj [T�Hijx(t)
+ T(Bi +�Bi)r] (24)
where
�[THijT�1] = lim
�t!0
kI+THijT�1�tk � 1
�t
= �maxTHijT
�1 + (THijT�1)�
2(25)
is the corresponding matrix measure [88] of the induced matrix norm ofkTHijT
�1k (or the logarithmic derivative ofkTHijT�1k); �max(�)
denotes the largest eigenvalue,� denotes the conjugate transpose. From(24),
dkTx(t)k
dt�
p
i=1
c
j=1
wimj�[THijT�1] kTx(t)k
+
p
i=1
c
j=1
wimjkT�HijT�1k kTx(t)k
+
p
i=1
wiT(Bi +�Bi)r
�
p
i=1
c
j=1
wimj(�[THijT�1]
+ kT�HijT�1k ) kTx(t)k
+
p
i=1
wiT(Bi +�Bi)r) : (26)
Let �[THijT�1] be designed such that
�[THijT�1] � �kT�HijT
�1kmax � " for all i andj (27)
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 829
wherekT�HijT�1kmax is the maximum value ofkT�HijT
�1k,and" is a designed nonzero positive constant. Increasing the value of"
will usually result in a system with improved performance but degradedrobustness. In the next section, we shall show that the finding ofT canbe formulated into a NMI or a LMI problem. From (26) and (27),
dkTx(t)k
dt� �
p
i=1
c
j=1
wimj"kTx(t)k
+
p
i=1
wjkT(Bi +�Bi)rk
= �"kTx(t)k+
p
i=1
wikT(Bi +�Bi)rk
)dkTx(t)k
dt+ "kTx(t)k e
"(t�t )
�
p
i=1
wikT(Bi +�Bi)rke"(t�t )
)d
dt( kTx(t)ke"(t�t ))
�
p
i=1
wijT(Bi +�Bi)rke"(t�t ) (28)
whereto < t is an arbitrary initial time. Based on (28), there are twocases to investigate the system behavior: 1)r = 0 and 2)r 6= 0. Forthe former case, it can be shown that if the condition (27) is satisfied,the closed-loop system (9) is stable, andkx(t)k ! 0 ast!1.
Proof: For r = 0, from (28),
d
dtkTx(t)ke"(t�t ) � 0
) kTx(t)ke"(t�t ) � kTx(to)k
) kTx(t)k � kTx(to)ke�"(t�t )
: (29)
Since" is a positive value,kTx(t)k ! 0 ast ! 1, and
�min(TTT) kx(t)k2 � kTx(t)k2 = x(t)TTT
Tx(t)
� �max(TTT) kx(t)k2 (30)
where�max(TTT) and�min(T
TT) denote the maximum and min-imum singular values ofTTT, respectively. AsTTT is symmetricpositive definite (T has rankn), from (30), we havekTx(t)k ! 0only whenkx(t)k ! 0. QED
For the latter case ofr 6= 0, the system states are bounded if thecondition (27) is satisfied andr is bounded.
Proof: For r 6= 0, from (28)
kTx(t)ke"(t�t ) � kTx(to)k+t
t
p
i=1
wi
� kT(Bi +�Bi)rke"(��t )
d�
) kTx(t)ke"(t�t ) � kTx(to)k+ kT(B̂+�B̂)rk
�t
t
e"(��t )
d�
where
kT(B̂+�B̂)rk � maxikT(Bi +�Bi)rkmax
� kT(Bi +�Bi)rk:
Then
kTx(t)ke"(t�t ) � kTx(to)k+kT(B̂+�B̂)rk
"(e"(t�t ) � 1)
) kTx(t)k � kTx(to)ke�"(t�t ) +
kT(B̂+�B̂)rk
"
� (1� e�"(t�t )): (31)
Since the right-hand side of (31) is finite ifr is bounded, the systemstates are also bounded. QED.
The above analysis gives an upper bound ofkTx(t)k under differentcases ((29) and (31)). Similarly, a lower bound ofkx(t)k can be ob-tained by following the same analysis procedure withx(t � �t) =x(t)� _x(t)�t+#(�t) and#(�t) = �x(t)+ _x(t)�t+x(t��t).Hence, from (30),kx(t)k satisfies the following conditions:
kTx(to)ke��(t�t )
j �max(TTT) j� kx(t)k �
kTx(to)ke�"(t�t )
j �min(TTT) j
for r = 0 (32)
or
max
kTx(to)ke��(t�t ) �
kT(B̂+�B̂)rk
�(1� e��(t�t )
j �max(TTT) j; 0
� kx(t)k for r 6= 0
�kTx(to) ke
�"(t�t ) +kT(B̂+�B̂)rk
"(1� e�"(t�t ))
j �min(TTT) j
(33)
where
�[�THijT�1] � � kT�HijT
�1kmax + � for all i andj
(34)
and� is a designed positive constant. Equation (34) is a condition gov-erning� under GDA. For PDA,� is governed by
�[�THiiT�1] � �kT�HiiT
�1kmax + � for all i�[�TJijT
�1] � �kT�JijT�1kmax + � for all i < j
:
(35)
For SDA,� is governed by
�[�THjT�1] � �kT�HjT
�1kmax + � for all j: (36)
From (32) or (33),1 the dynamic performance of the closed-loopsystem can be predicted. Also, the condition (27) is a sufficient criterionof stability for the system (9). In conclusion, the stability criterion andthe robustness of the closed-loop fuzzy system under the three designapproaches can be summarized by the following lemmas.
Lemma 1: Under GDA, the fuzzy control system as given by (9)without parameter uncertainty, i.e.,kT�HijT
�1k = 0, is stable ifTHijT
�1 is designed such that
�[THijT�1] � �" for all i andj:
1It should be noted that (32) or (33) is applicable to the three design ap-proaches, but the conditions governing" and� as given by (27) and (34), re-spectively, for GDA have to be modified for PDA and SDA accordingly.
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

830 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
Under PDA, the fuzzy control system as given by (12) without pa-rameter uncertainty, i.e.,kT�HiiT
�1k = 0 andkT�JijT�1k = 0,is stable ifTHiiT
�1 andTJijT�1 are designed such that
�[THiiT�1] � �" for all i
�[TJijT�1] � �" for all i < j:
Under SDA, the fuzzy control system (15) without parameter uncer-tainty, i.e.,kT�HjT
�1k = 0, is stable ifTHjT�1 is designed such
that
�[THjT�1] � �" for all j:
Definition 1: The robust area of a fuzzy control system is defined asthe area in the parameter space inside which uncertainties are allowedto exist without affecting the system stability.
Lemma 2: Under GDA, with the uncertain fuzzy control systemgiven by (9), the robust area is governed by the following conditions:
kT�HijT�1kmax � ��[THijT
�1]� " for all i andj
where kT�HijT�1kmax is the maximum possible value of
kT�HijT�1k.
Under PDA, with the uncertain fuzzy control system given by (12),the robust area is governed by the following conditions:
kT�HiiT�1kmax � ��[THiiT
�1] � " for all ikT�JijT
�1kmax � ��[TJijT�1]� " for all i < j
wherekT�HiiT�1kmax andkT�JijT�1kmax are the maximum
possible values ofkT�HiiT�1k andkT�JijT�1k, respectively.
Under SDA, with the uncertain fuzzy control system given by (15),the robust area is governed by the following conditions:
kT�HjT�1kmax � ��[THjT
�1]� " for all j
where kT�HjT�1kmax is the maximum possible value of
kT�HjT�1k:.
Both Lemmas 1 and 2 can be proved easily using condition (27) forGDA. Also, from (32) or (33), we can see thatkx(t)k will go to itssteady state faster if we have a larger". Hence, the system performanceunder a larger" is expected to be better than that with a smaller". Onthe other hand, Lemma 2 implies that the robust area has to be smallerif we have a larger". Thus, we can conclude that a system with a larger" is less robust than that with a smaller".
Finially, one should note that with the use of a suitable transforma-tion matrixT, we can transform any Hurwitz matrix having a positiveor zero matrix measure into another matrix having a negative matrixmeasure. The stability and robustness conditions derived can then beapplied. The problem left is how to find such a matrixT for a givensystem. This will be given in the next section.
IV. THE FINDING OF MATRIX T
In this section, we formulate the task of findingT in Lemmas 1and 2 into a NMI problem. The transformation matrixT should befound such that the uncertainty free system is stable (due to Lemma 1).Moreover, on minimizing the matrix measure of the system matrices,the transformation matrix should give us the maximum robust area. Inview of these properties and Lemma 2, the NMI problem can be statedas follows.
For GDA, find T that minimizes�[THijT
�1] + kT�HijT�1kmax for all i and j
subject to
THijT�1 +T
�1HT
ijTT < 0 for all i andj: (37)
For PDA, findT that minimizes
�[THiiT�1] + kT�HiiT
�1kmax for all i�[TJijT
�1] + kT�JijT�1kmax for al i < j
subject to
THiiT�1 +T
�1HT
iiTT < 0 for all i
TJijT�1 +T
�1JT
ijTT < 0 for all i < j
: (38)
For SDA, findT that minimizes�[THjT�1] + kT�HjT
�1kmaxfor all j subject to
THjT�1 +T
�1HT
j TT < 0 for all j: (39)
The proof of condition (37) under GDA can be obtained by consid-ering that�[THijT
�1] is negative only when, from (25), the max-imum eigenvalue of(THijT
�1 + T�1
HT
ijTT)=2 is negative, i.e.,
when(THijT�1 +T
�1HT
ijTT)=2 is negative definite. This is be-
cause theHij of the control problem we consider are real, hence,HT
ij = H�
ij . Similarly, (38) and (39) can be obtained for PDA andSDA, respectively. In particular, ifHij +H
T
ij are negative definite forall i andj, the identity matrixI 2 <n�n is the transformation matrix.For an uncertain fuzzy control system, the stability can be guaranteedif the conditions in Lemma 2 are satisfied.T is needed to determinethe norm of the transformed parameter uncertainties.
The above NMI problem can be reduced to a LMI problem ifT =TT. In this case, Lemma 1 will be reduced to the stability condition in
[37] when an uncertainty free fuzzy control system is considered.Proof: Under GDA,
�[THijT�1] < 0) (THijT
�1+T�1 HT
ijTT)=2 is negative definite.
Then, ifT = TT
T� (THijT�1 +T
�1HT
ijTT)�T is negative definite:
) TTHij +HT
ijTT is negative definite for alli andj:
(40)
LetTT = P (P is symmetric positive definite), the problem of findingthe stability condition for GDA can be formulated as follows:
FindT that minimizes�[THijT�1] + kT�HijT
�1kmax
for all i andj subject toPHij +HT
ijP < 0
for all i andj: (41)
Similarly, the problem of finding the stability conditions for PDA andSDA can be formulated as follows:
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 831
For PDA, findT that minimizes
�[THiiT�1] + kT�HiiT
�1kmax for all i�[TJijT
�1] + kT�JijT�1kmax for all i < j
subject to
PHii +HT
iiP < 0 for all iPJij + J
T
ijP < 0 for all i < j: (42)
For SDA, findT that minimizes�[THjT�1] + kT�HjT
�1kmaxfor all j subject to
PHj +HT
j P < 0 for all j (43)
QED
In particular, we can also formulate the finding ofGi’s of the fuzzycontroller that satisfy the stability and robustness conditions as an LMIproblem. This is done by letting the feedback gains of the fuzzy con-troller beGi = �RBT
i P, whereR 2 <m�m is a symmetric positivedefinite matrix. Condition (41) can then be restated as follows:
P(Ai �BiRBT
i P) + (Ai �BiRBT
j P)TP
is negative definite for alli andj
) PAi +AT
i P� 2PBiRBT
j P is negative
definite for alli andj: (44)
Multiplying P�1 to the left and the right sides, condition (44) becomes
P�1(PAi +A
T
i P� 2PBiRBT
j P)P�1 is negative
definite for alli andj
) AiP�1 +P�1AT
i � 2BiRBT
j is negative definite
for all i andj: (45)
Hence, the problem of findingT underGi = �RBT
i P for the threedesign approaches can be summarized as follows.
For GDA andGi = �RBT
i P.FindT andR that minimizes�[THijT
�1] + kT�HijT�1kmax
for all i andj such that
AiP�1 +P�1AT
i � 2BiRBT
j < 0 for all i andj: (46)
For PDA andGi = �RBT
i P.FindT andR that minimizes
�[THiiT�1] + kT�HiiT
�1kmax for all i�[TJijT
�1] + kT�JijT�1kmax for all i < j
such that
AiP�1 +P�1AT
i � 2BiRBT
i < 0;
for all i(Ai +Aj)P
�1 +P�1(Ai +Aj)T � 2BiRB
T
j
� 2BjRBT
j < 0; for all i < j
: (47)
For SDA andGi = �RBT
i P
FindT andR that minimizes�[THjT�1]+kT�HjT
�1kmax forall j such that
AjP�1 +P�1AT
j � 2BjRBT
j < 0 for all j: (48)
V. PROCEDURE FORFINDING SINGLE-GRID-POINT FUZZY
CONTROLLERS
The procedure for developing SGP fuzzy controllers is summarizedas follows.
1) Obtain the mathematical model for the uncertain multivariablenonlinear system. (Skip this step if a TS-fuzzy plant model isalready at hand or obtainable by other ways.)
2) Obtain the TS-fuzzy plant model.3) Determine the ranges of the parameter uncertainties,�Ai and
�Bi.4) Decide the number of rules and membership functions of the
SGP fuzzy controller. Then, choose one of the three design ap-proaches to design the state feedback control law in each rule ofthe SGP fuzzy controller.
5) Apply Lemma 1 to check the stability of the uncertainty freefuzzy control system. If the fuzzy control system is stable, applyLemma 2 to check the stability and robustness of the fuzzy con-trol system after the defined ranges of parameter uncertaintieshave been introduced. The finding of the transformation matrixT in Lemmas 1 and 2 can be formulated as an NMI or an LMIproblem.
6) If the stability and robustness tests are failed, redesign the fuzzycontroller by going back to Step 4).
VI. A PPLICATION EXAMPLES
Application examples on stabilizing a ball-and-beam system [61],an uncertain nonlinear mass-spring-damper system [37] and a two-in-verted pendulum system [40] are given in this section. We shall findSGP fuzzy controllers under different design approaches by followingthe design procedures given in the previous section. Simulation resultswill be given.
A. Ball-and-Beam System
A ball-and-beam system with uncertain system parameters will beconsidered in this example by following the procedure in the previoussection. GDA will be employed to design the SGP fuzzy controller.
1) A ball-and-beam system is shown in Fig. 2 [61]. Its dynamicsequations are described by the following:
_x1(t) = x2(t)
_x2(t) = B(x1(t)x4(t)2 + g sin(x3(t)))
_x3(t) = x4(t)
_x4(t) = u(t) (49)
wherex1(t) is the position of the ball measured from the centreof the beam,x2(t) is the velocity of the ball,x3(t) is the angle ofthe beam with respect to the horizontal axis,x4(t) is the angularvelocity of the beam,u(t) is the input torque;M 2 [0.05 0.5] kgis the mass of the ball,R = 0.01 m is the radius of the ball,g =9.8 ms�2 is the acceleration due to gravity,B � (MR2=Jb +MR2) � 1, Jb (in kgm2) is the moment of inertia of the ballabout the centre of the ball and is not necessary to be knownin this example. The objective of this application example is todrive the ball to the centre of the beam such thatx1(t) = 0.
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

832 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
Fig. 2. Ball-and-beam system.
Fig. 3. Membership functions of the fuzzy controller for the ball-and-beamsystem: Solid line:� (x (t)) = (�x (t) + x )=(x � x ),Dotted line:� (x (t)) = 1� � (x (t)).
2) The ball-and-beam system can be represented by a TS-fuzzyplant model having four rules. Theith rule can be written asfollow:
Rulei: IF f1(x(t)) is Mi1 AND f2(x(t)) is Mi
2
THEN _x(t) = Aix(t) +Biu(t);
i = 1; 2; 3; 4 (50)
so that the system dynamics is described by
_x(t) =
4
i=1
wi(Aix(t) +Biu(t)) (51)
where
x(t) = [x1(t) x2(t) x3(t) x4(t)]T;
x1(t) 2 [x1 x1 ] = [�0:35 0:35];
x2(t) 2 [x2 x2 ] = [�1 1];
f1(x(t)) = Bx4(t)2 and f2(x(t)) = �B
sin(x3(t))
x3(t);
A1 =
0 1 0 0
f1 0 �gf2 0
0 0 0 1
0 0 0 0
;
A2 =
0 1 0 0
f1 0 �gf2 0
0 0 0 1
0 0 0 0
A3 =
0 1 0 0
f1 0 �gf2 0
0 0 0 1
0 0 0 0
and
A4 =
0 1 0 0
f1 0 �gf2 0
0 0 0 1
0 0 0 0
;
B1 = B2 = B3 = B4 =
0
0
0
1
;
we choosef1 = �1 andf1 = �f1 , f2 = 0:6 andf2 = 1;
wi =�M
(f1(x(t)))� �M
(f2(x(t)))
4
l=1
(�M
(f1(x(t)))� �M
(f2(x(t)))
;
�M
(f1(x(t))) =�f1(x(t)) + f1
f1 � f1for � = 1; 2 and
�M
(f1(x(t))) = 1� �M
(f1(x(t))) for � = 3; 4;
�M (f2(x(t))) =�f2(x(t)) + f2
f2 � f2for " = 1; 3 and
�M
(f2(x(t))) = 1� �M
(f2(x(t))) for � = 2; 4
are the membership functions related to the uncertain system pa-rameters.
3) We can see that the uncertain parameters are inside the member-ship functions. Hence, the parameter uncertainties of�Ai and�Bi, i = 1, 2, 3, 4, are all zero in this example.
4) A two-rule fuzzy controller is designed for the nonlinear plant(49) under GDA. The rules are listed as follows:
Rulej: IF x1(t) is Nj1
THEN u(t) = Gjx(t)
= �RBTj Px(t); j = 1; 2: (52)
We choose the membership functions ofNj1, j = 1, 2, as follows:
�N
(x1(t)) =�x1(t) + x1
x1 � x1
�N
(x1(t)) = 1� �N
(x1(t)): (53)
The membership functions are shown in Fig. 3.5) By solving the LMI problem as described in (46), we have
P =
29:5656 �21:3312 3:4445 �11:0125
�21:3312 55:1292 7:4880 11:1344
3:4445 7:4880 4:4989 �7:3562
�11:0125 11:1344 �7:3562 36:2820
and
R = 87:4582:
AsP = TT, we have
T =
0:3461 0:2003 �0:5841 �0:0967
0:2003 0:3311 �0:6914 �0:1572
�0:5841 �0:6914 2:7532 0:5618
�0:0967 �0:1572 0:5618 0:2926
:
Table I summarizes the stability and robustness analysis results.By Lemma 1, we can conclude that the closed-loop system isasymptotically stable.
Figs. 4–7 show the responses of the system states under the initialcondition ofx(0) = [0:35 0 0 0]T. From (32), the system perfor-mance should lie inside the range
0:35e��t � kx(t)k � 0:35e�"t (54)
where " and � are chosen as 0.1272 (the smallest absolute valueamong�[THijT
�1] in Table I) and 34.8506 (the largest value among�[�THijT
�1] in Table I), respectively.
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 833
Fig. 4. Responses ofx (t) of the ball-and-beam system underM = 0.05 kg(solid line) andM = 0.5 kg (dotted line).
Fig. 5. Responses ofx (t) of the ball-and-beam system underM = 0.05 kg(solid line) andM = 0.5 kg (dotted line).
Fig. 6. Responses ofx (t) of the ball-and-beam system underM = 0.05 kg(solid line) andM = 0.5 kg (dotted line).
Fig. 7. Responses ofx (t) of the ball-and-beam system underM = 0.05 kg(solid line) andM = 0.5 kg (dotted line).
TABLE ISTABILITY AND ROBUSTNESSRESULTS OF
THE BALL -AND-BEAM SYSTEM
Fig. 8. Mass-spring-damper system.
B. Mass-Spring-Damper System
We shall follow the deign procedure in the previous section to obtaina fuzzy controller under PDA for a mass-spring-damper system subjectto parameter uncertainties.
1) Fig. 8 shows a diagram of the mass-spring-damper system. Itsdynamic equation is given by
M �x(t) + g(x(t); _x(t)) + f(x(t)) = �( _x(t))u(t) (55)
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

834 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
whereM is the mass andu is the force,f(x(t)) depicts thespring nonlinearity and uncertainty,g(x(t), _x(t))depicts thedamper nonlinearity, and�( _x(t)) uncertainty, and depicts theinput nonlinearity and uncertainty
g(x(t); _x(t)) = D(c1x(t) + c2 _x(t)3 + c3(t) _x(t))
f(x(t)) = K(c4x(t) + c5x(t)3 + c6(t)x(t))
�( _x(t)) = 1:4387 + c7 _x(t)2 + c8(t) cos(5 _x(t)): (56)
The operating range of the states is assumed to be within�1.5and 1.5. The parameters are chosen as follows:
M = D = K = 1:0; c1 = 0; c2 = 1;
c3(t) =cU3 + cL3
2+ c
L
3 �cU3 + cL3
2sin(10t)
so that
c3(t) 2 [cL3 ; cU
3 ]; c4 = 0:01; c5 = 0:1;
c6(t) =cU6 + cL6
2+ c
L
6 �cU6 + cL6
2cos(5t)
so that
c6(t) 2 [cL6 ; cU
6 ]; c7 = �0:03;
c8(t) =cU8 + cL8
2+ c
L
8 �cU8 + cL8
2cos(5t)
so that
c8(t) 2 [cL8 ; cU
8 ]; cL
3 = cL
6 = �0:3;
cU
3 = cU
6 = 0:3; cL
8 = �0:2; cU
8 = 0:2:
It can be seen that the uncertain parametersc3, c6 andc8 aremodeled as known functions of timet. Practically, they can besome uncertain parameters within the specified ranges. The non-linear system then becomes
�x(t) = � _x(t)3 � 0:01x(t)� 0:1x(t)3 � c3(t) _x(t)� c6(t)x(t)
+ (1:4387� 0:13 _x(t)2 + c8(t) cos(5 _x(t)))u(t):
(57)
2) The mass-spring-damper system (57) can exactly be representedby a TS-fuzzy plant model with the following fuzzy rules:
Rulei: IF x(t) is Mi
1 AND _x(t) is Mi
2
THEN _x(t) = (Ai +�Ai)x(t) + (Bi +�Bi)u(t)
i = 1; 2; 3; 4 (58)
where the membership functions ofMi
�, i = 1, 2,� = 1, 2, 3, 4,are given by
�M
(x(t)) = �M
(x(t)) = 1�x(t)2
2:25
�M
(x(t)) = �M
(x(t)) =x(t)2
2:25
�M
( _x(t)) = �M
( _x(t)) = 1�_x(t)2
6:75
�M
( _x(t)) = �M
( _x(t)) =_x(t)2
6:75(59)
which are shown in Fig. 9. Also,
x(t) =x1(t)
x2(t); x1(t) = x(t)
Fig. 9. Membership functions of the TS-fuzzy plant model of the uncertainnonlinear mass-spring-damper system: Upper:� (x(t)) = � (x(t)) =
1 � (x(t) =2:25) (solid line),� (x(t)) = � (x(t)) = (x(t) =2:25)
(dotted line). Lower:� ( _x(t)) = � ( _x(t)) = 1 � ( _x(t) =6:75) (solidline),� ( _x(t)) = � ( _x(t)) = ( _x(t) =6:75) (dotted line).
TABLE IISTABILITY ANALYSIS RESULT OF THE MASS-SPRING-DAMPER
SYSTEM FOR i = j
TABLE IIISTABILITY ANALYSIS RESULT OF THE MASS-SPRING-DAMPER
SYSTEM FOR i 6= j
x2(t) = _x(t) + 2x1(t); A1 = A2 =�2 0
�2:01 1
A3 = A4 =�2 0
�2:235 1; B1 = B3 =
0
1:4387
B2 = B4 =0
0:5613
�A1 = �A2 = �A3 = �A4 =0 0
2c3(t)� c6(t) �c3(t)
�B1 = �B2 = �B3 = �B4 =0
c8(t) cos(5 _x(t)):
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 835
3) The ranges of the parameter uncertainties are
�A1 = �A2 = �A3 = �A4 2 0 0
�0:9 �0:3;
0 0
0:9 0:3
�B1 = �B2 = �B3 = �B4 � 0
�0:2;
0
0:2:
4) PDA is employed to design the SGP fuzzy controller. We usefour fuzzy rules to implement the SGP fuzzy controller and themembership functions of the fuzzy controller are chosen to be thesame as those of the TS-fuzzy plant model (58), i.e., the mem-bership functions (59). The rules of the SGP fuzzy controller areas follows:
Rulej: IF x(t) is Mj1
AND _x(t) is Mj2
THEN
u(t) = Gjx(t); j = 1; 2; 3; 4: (60)
The feedback gains are then designed as
G1 = [1:3971 � 2:0852]; G2 = [3:5810 � 5:3447]
G3 = [1:5535 � 2:0852]; G4 = [3:9818 � 5:3447]
so that
H11 = H22 = H33 = H44 =�2 0
0 �2:
5) Tables II and III summarize the stability and robustness analysisresults. From the numerical values listed in the tables, and byLemmas 1 and 2 withT = I 2 <2�2, the stability of the uncer-tain fuzzy control system is guaranteed. This is because both thesecond and the fifth columns of these two tables all contain onlynegative values.
The zero-input responses of the system under the initial conditionsx(0) = [�1 � 1]T with parameter uncertainties (solid lines) andwithout parameter uncertainties (dotted lines) are shown in Fig. 10.From (32), the system performance should lie inside the range
p2e��t � kx(t)k �
p2e�"t (61)
where" and� are chosen as 0.0794 (the smallest absolute value among�[Hii]+k�Hiikmax and�[Jij ]+k�Jijkmax in Tables II and III) and5.1702 (the largest value among�[Hii] +k�Hiikmax and�[�Jij ] +k�Jijkmax in Tables II and III), respectively. The simulation resultsverify the condition (61). It should be noted that the stability and ro-bust conditions shown in Lemmas 1 and 2 are sufficient conditions. Asystem not satisfying these conditions may still be a stable system. Thiscan be shown by increasing the ranges of the parameter uncertaintiesto
�A1 = �A2 = �A3 = �A4 2 0 0
�2 �1;
0 0
2 1
and
�B1 = �B2 = �B3 = �B4 2 0
�0:5;
0
0:5:
In this case, the stability and robustness conditions in Lemmas 1 and 2cannot be satisfied. However, the simulation results as shown in Fig. 11display stable responses.
C. Two-Inverted Pendulum System
An SGP fuzzy controller will be designed to stabilize a two-invertedpendulum system under SDA by following the procedure in the pre-vious section.
(a) A two-inverted pendulum system is shown in Fig. 12. It consistsof two cart-pole inverted pendulums. The inverted pendulumsare linked by a spring in the middle. The carts will move to andfro during the operation. The control objective is to balance theinverted pendulums vertically despite the movings of the springand carts by applying forces to the tips of the pendulums. Re-ferring to Fig. 12,M andm are the masses of the carts and thependulums, respectively,m = 10 kg andM = 100 kg.L = 1 m isthe length of the pendulums. The spring has a stiffness constantk = 1 N/m.y1(t) = sin(2t) andy2(t) = L + sin(3t) are thetrajectories of the moving carts.u1(t) andu2(t) are the forcesapplied to the pendulums.�1(t) and�2(t) are the angular dis-placements of the pendulums measured from the vertical. Thedynamic equation of the two-inverted pendulum system can bewritten as follows:
_x(t) = A(x(t))x(t) +Bu(t) (62)
where
x(t) =
x1(t)
x2(t)
x3(t)
x4(t)
=
�1(t)_�1(t)
�2(t)_�2(t)
x1 2 [x1 x1 ] = ��
2
�
2
x3 2 [x3 x3 ] = ��
2
�
2
A(x(t)) =
0 1 0 0
f1(x1(t)) 0 0 0
0 0 0 1
0 0 f2(x3(t)) 0
B =
0 0
� 0
0 0
0 �
; and u(t) =u1(t)
u2(t)
f1(t) =2
L� m
Msin(x1(t))x1(t)
f2(t) =2
L� m
Msin(x3(t))x3(t); � =
2
mL2:
(b) A four-rule TS-fuzzy plant model is used to represent the two-inverted pendulum system. Theith rule of the TS-fuzzy plantmodel is given by
Rulei: IF f1(x1(t)) is Mi1AND f2(x3(t)) is Mi
2
THEN _x(t) = Aix(t) +Bu(t);
i = 1; 2; 3; 4 (63)
where Mi� is a fuzzy term of rulei, i = 1, 2, 3, 4,� = 1, 2. Then,
the system dynamics is described by
_x(t) =
4
i=1
wi[Aix(t) +Bu(t)] (64)
where
A1 =
0 1 0 0
f1 0 0 0
0 0 0 1
0 0 f2 0
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

836 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
Fig. 10. System responses of the nonlinear mass-spring-damper system withparameter uncertainties (solid lines) and without parameter uncertainties (dottedlines).
Fig. 11. System responses of the nonlinear mass-spring-damper system underlarger ranges of parameter uncertainties.
Fig. 12. Two-inverted pendulum system.
Fig. 13. Membership functions of the TS-fuzzy plant model ofthe two-inverted pendulum system: Upper:� (f (x(t))) =
� (f (x(t))) = (�f (x(t)) + f )=(f � f ) (solidline), � (f (x(t))) = � (f (x(t))) = 1 � � (f (x(t)))
(dotted line); Lower: � (f (x (t))) = � (f (x (t))) =
(�f (x (t)) + f )=(f � f ) (solid line),� (f (x (t))) = � (f (x (t))) = 1� � (f (x (t))) (dotted line).
A2 =
0 1 0 0
f1 0 0 0
0 0 0 1
0 0 f2 0
A3 =
0 1 0 0
f1 0 0 0
0 0 0 1
0 0 f2 0
A4 =
0 1 0 0
f1 0 0 0
0 0 0 1
0 0 f2 0
wi =�M
(f1(x1(t)))� �M
(f2(x3(t)))
4
i=1
(�M
(f1(x1(t)))� �M
(f2(x3(t))))
�M
(f1(x1(t))) =�f1(x1(t)) + f1
f1 � f1for � = 1; 2 and
�M
(f1(x1(t))) = 1� �M
(f1(x1(t))) for � = 3; 4
�M (f2(x3(t))) =�f2(x3(t)) + f2
f2 � f2for " = 1; 3; and
�M
(f2(x3(t))) = 1� �M
(f2(x3(t))) for � = 2; 4
f1 =2
L+ x1 ; f1 =
2
L� x1
f2 = f1 and f2 = f1 :
The membership functions are shown in Fig. 13.(c) �Ai = 0 and�Bi = 0, i = 1, 2, 3, 4.(d) A four-rule SGP fuzzy controller is designed under SDA.
Rulej: IF f1(x1(t)) is Mi1 andf2(x3(t)) is Mi
2
THEN u(t) = Gjx(t); j = 1; 2; 3; 4: (65)
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 837
The feedback gains are then chosen as
G1 =�116:6410 �119:7827 �95:0589 �39:6463
�97:0293 �40:0240 �260:5216 �180:2173
G2 =�116:6410 �119:7827 �95:0589 �39:6463
�97:0293 �40:0240 �323:3534 �180:2173
G3 =�179:4729 �119:7827 �95:0589 �39:6463
�97:0293 �40:0240 �260:5216 �180:2173
and
G4 =�179:4729 �119:7827 �95:0589 �39:6463
�97:0293 �40:0240 �323:3534 �180:2173
so that
H1 = H2 = H3 = H4
=
0 1 0 0
�6:4028 �5:9891 �4:7529 �1:9823
0 0 0 1:0000
�4:8515 �2:0012 �13:5969 �9:0109
:
(e) It can be seen that the closed-loop system is a linear system. Theclosed-loop system matrix is stable and has the eigenvalues of�1, �2, �3, and�4. Thus, we can conclude the closed-loopsystem is asymptotically stable.
The zero-input responses of the system under the initial conditions
x(0) =22�
450 �
22�
450
T
are shown in Figs. 14 and 15, respectively. In this example, it can beseen that an uncertainty free nonlinear system will become a linearsystem under SDA. We now consider thatM � m is an unknownvalue. GDA is employed to design a fuzzy controller with four rulesdescribed as follows:
Rulej: IF x1(t) is Nj1
AND x3(t) is Nj2
THEN u(t) = Gjx(t); i = 1; 2; 3; 4: (66)
The membership functions are designed as
�N
(x1(t)) =�x1(t) + x1
x1 � x1for � = 1; 2 and
�N
(x1(t)) = 1� �N
(x1(t)) for � = 3; 4;
�N (x3(t)) =�x3(t) + x3
x3 � x3for " = 1; 3; and
�N
(x3(t)) = 1� �N
(x3(t)) for � = 2; 4:
Table IV lists the stability analysis results with
T =
1:0159 0:0669 0:0431 �0:0210
0:0669 0:3157 �0:0226 �0:0395
0:0431 �0:0226 1:0833 0:0358
�0:0210 �0:0395 0:0358 0:2546
:
By Lemma 1, as the values in the second column are all negative, it canbe concluded that the closed-loop system is stable. Under the GDA, thezero-input responses of the system withM = 10 kg under the initialconditions
x(0) =2�
450 �
22�
450
T
are shown in Figs. 16 and 17, respectively.
Fig. 14. Responses ofx (t) (solid line) andx (t) (dotted line) of thetwo-inverted pendulum system under SDA withM = 100 kg.
Fig. 15. Responses ofx (t) (solid line) andx (t) (dotted line) of thetwo-inverted pendulum system under SDA withM = 100 kg.
Fig. 16. Responses ofx (t) (solid line) andx (t) (dotted line) of thetwo-inverted pendulum system under GDA withM = 10 kg.
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

838 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
Fig. 17. Responses ofx (t) (solid line) andx (t) (dotted line) of thetwo-inverted pendulum system under GDA withM = 10 kg.
TABLE IVSTABILITY ANALYSIS RESULT OF THETWO-INVERTED PENDULUM SYSTEM
UNDER GDA
VII. CONCLUSION
The stability and robustness of an uncertain multivariable fuzzy con-trol system that is designed based on a SGP approach have been inves-tigated. The analyses are general and systematic. Stability and robust-ness conditions under three design approaches of the fuzzy controllerhave been derived. The resulting fuzzy controller is capable of tackling
multivariable nonlinear systems subject to small parameter uncertain-ties. Application examples on stabilizing various uncertain nonlinearsystems have been given to illustrate the stabilizability and robustnessproperty of the proposed SGP fuzzy controllers. As a note here, the re-sults of the SGP approach is the basis for the development of a moregeneral multiple-grid-point (MGP) fuzzy controller [50], [52], that cantackle nonlinear plants subject to large parameter uncertainties.
REFERENCES
[1] E. H. Mamdani and S. Assilian, “An experiment in linguistic synthesiswith a fuzzy controller,”Int. J. Man-Mach. Stud., vol. 7, pp. 1–13, 1975.
[2] R. M. Tong, M. Beck, and A. Latten, “Fuzzy control of the activatedsludge wastewater treatment process,”Automatica, vol. 16, pp. 695–697,1980.
[3] L. P. Holmblad and J. J. Ostergaard, “Control of a cement klin by fuzzylogic techniques,” inProc. 8th IFAC Conf., Kyoto, Japan, 1981, pp.809–814.
[4] T. Takagi and M. Sugeno, “Fuzzy identification of systems and its ap-plications to modeling and control,”IEEE Trans. Syst., Man, Cybern.,vol. SMC-15, no. 1, pp. 116–132, 1985.
[5] R. A. Decarlo, S. H. Zak, and G. P. Matthews, “Variable structure controlof nonlinear multivariable systems: A tutorial,”Proc. IEEE, vol. 76, no.3, pp. 212–232, 1988.
[6] M. Sugeno and G. T. Kang, “Structure identification of fuzzy model,”Fuzzy Sets Syst., vol. 28, pp. 15–33, 1988.
[7] H. Ying, W. Siler, and J. J. Buckley, “Fuzzy control theory: A nonlinearcase,”Automatica, vol. 26, no. 3, pp. 513–520, 1990.
[8] K. Tanaka and M. Sugeno, “Stability analysis and design of fuzzy controlsystems,”Fuzzy Sets Syst., vol. 45, pp. 135–156, 1992.
[9] Z. Y. Zhao, M. Tomizuka, and S. Isaka, “Fuzzy gain scheduling ofPID controllers,”IEEE Trans. Syst., Man, Cybern., vol. 23, no. 5, pp.1392–1398, 1993.
[10] L. X. Wang, “Stable adaptive fuzzy control of nonlinear systems,”IEEETrans. Fuzzy Syst., vol. 1, no. 2, pp. 146–155, 1993.
[11] H. A. Malki, H. Li, and G. Chen, “New design and stability analysis offuzzy proportional-derivative control systems,”IEEE Trans. Fuzzy Syst.,vol. 2, no. 4, pp. 245–253, 1994.
[12] C. Y. Yu and Y. Stepanenko, “Adaptive of nonlinear systems with fuzzylogic,” IEEE Trans. Fuzzy Syst., vol. 2, no. 4, pp. 285–294, 1994.
[13] R. Palm, “Robust control by fuzzy sliding mode,”Automatica, vol. 30,no. 9, pp. 1429–1437, 1994.
[14] S. C. Lin and Y. Y. Chen, “Design of adaptive fuzzy sliding mode fornonlinear systems control,” inProc. 3rd IEEE Conf. Fuzzy Syst., 1994,pp. 35–39.
[15] S. Boyd, L. El. Ghaoui, E. Feron, and V. Balakrishnan,Linear MatrixInequalities in System and Control Theory. Philadelphia, PA: SIAM,1994.
[16] A. Blanco, M. Delgado, and I. Requena, “A learning procedure to iden-tify weighted rules by neural networks,”Fuzzy Sets Syst., no. 69, pp.29–36, 1995.
[17] Y. C. Chen and C. C. Teng, “A model reference control structure usinga fuzzy neural network,”Fuzzy Sets Syst., vol. 73, pp. 29–36, 1995.
[18] S. Galichet and L. Foulloy, “Fuzzy controllers: Synthesis and equiva-lence,”IEEE Trans. Fuzzy Syst., vol. 3, pp. 140–148, May 1995.
[19] A. E. Hajjaji and A. Rachid, “Analytic formulation of linguistic rules forfuzzy controller,”Fuzzy Sets Syst., vol. 73, pp. 219–225, 1995.
[20] C. T. Lin and Y. C. Lu, “A neural fuzzy system with linguistic teachingsignals,”IEEE Trans. Fuzzy Syst., vol. 3, no. 2, pp. 169–189, 1995.
[21] J. J. Shann and H. C. Fu, “A fuzzy neural network for rule acquiring onfuzzy control systems,”Fuzzy Sets Syst., vol. 71, pp. 345–357, 1995.
[22] T. K. Yin and C. S. G. Lee, “Fuzzy model-reference adaptive control,”IEEE Trans. Syst., Man, Cybern., vol. 25, no. 12, pp. 1606–1615, 1995.
[23] S. W. Kim and J. J. Lee, “Design of a fuzzy controller with fuzzy slidingplane,”Fuzzy Sets Syst., vol. 71, pp. 359–367, 1995.
[24] S. G. Cao and N. W. Ree, “Identification of dynamic fuzzy model,”Fuzzy Sets Syst., vol. 74, pp. 307–320, 1995.
[25] W. C. Kim, S. C. Ahn, and W. H. Kwon, “Stability analysis and stabiliza-tion of fuzzy state space models,”Fuzzy Sets Syst., vol. 71, pp. 131–142,1995.
[26] B. S. Moon, “Equivalence between fuzzy logic controllers and PI con-trollers for signal input systems,”Fuzzy Sets Syst., vol. 69, pp. 105–113,1995.
[27] W. Z. Qiaoa and M. Mizumoto, “PID type fuzzy controller and parame-ters adaptive method,”Fuzzy Sets Syst., vol. 78, pp. 23–35, 1996.
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 839
[28] D. Misir, H. A. Malki, and G. Chen, “Design and analysis of a fuzzyproportional-integral-derivative controller,”Fuzzy Sets Syst., vol. 79, pp.297–314, 1996.
[29] S. Kuntanapreeda and R. R. Fullmer, “A training rule which guaran-tees finite-region stability for a class of closed-loop neural-network con-trol systems,”IEEE Trans. Neural Networks, vol. 7, no. 3, pp. 745–751,1996.
[30] K. Tanaka, “An approach to stability criteria of neural-network controlsystems,”IEEE Trans. Neural Networks, vol. 7, no. 3, pp. 629–642,1996.
[31] H. X. Li and H. B. Gatland, “Conventional fuzzy control and its enhance-ment,” IEEE Trans. Syst., Man, Cybern. B, vol. 26, no. 5, pp. 791–797,1996.
[32] B. S. Chen, C. H. Lee, and Y. C. Chang, “H tracking design of uncer-tain nonlinear SISO systems: Adaptive fuzzy approach,”IEEE Trans.Fuzzy Syst., vol. 4, no. 1, pp. 32–43, 1996.
[33] C. H. Lee and S. D. Wang, “A self-organizing fuzzy controller,”FuzzySets Syst., vol. 80, pp. 295–313, 1996.
[34] C. S. Ting, T. H. S. Li, and F. C. Kung, “An approach to systematic de-sign of the fuzzy control system,”Fuzzy Sets Syst., vol. 77, pp. 151–166,1996.
[35] Q. P. Ha, “Robust sliding mode controller with fuzzy turning,”Electron.Lett., vol. 32, no. 17, pp. 1626–1628, 1996.
[36] K. Tanaka, T. Ikeda, and H. O. Wang, “Robust stabilization of a class ofuncertain nonlinear systems via fuzzy control: Quadratic stability,H
control theory, and linear matrix inequalities,”IEEE Trans. Fuzzy Syst.,vol. 4, no. 1, pp. 1–13, 1996.
[37] H. O. Wang, K. Tanaka, and M. F. Griffin, “An approach to fuzzy controlof nonlinear systems: Stability and design issues,”IEEE Trans. FuzzySyst., vol. 4, no. 1, pp. 14–23, 1996.
[38] S. G. Cao, N. W. Rees, and G. Feng, “Stability analysis of fuzzy con-trol systems,”IEEE Trans. Syst., Man, Cybern. B, vol. 26, no. 1, pp.201–204, 1996.
[39] J. T. Sponner and K. M. Passion, “Stable adaptive control using fuzzysystems and neural networks,”IEEE Trans. Fuzzy Syst., vol. 4, no. 3, pp.339–359, 1996.
[40] Z. M. Yen, “Adaptive multivariable fuzzy logic controller,”Fuzzy SetsSyst., vol. 86, pp. 43–60, 1997.
[41] J. S. Glower and J. Munighan, “Designing fuzzy controllers from a vari-able structures standing point,”IEEE Trans. Fuzzy Syst., vol. 5, no. 1,pp. 138–144, 1997.
[42] Q. P. Ha, “Sliding performance enhancement with fuzzy turning,”Elec-tron. Lett., vol. 33, no. 16, pp. 1421–1423, 1997.
[43] L. K. Wong, F. H. F. Leung, and P. K. S. Tam, “Lyapunov function baseddesign of heuristic fuzzy logic controllers,” inProc. 6th IEEE Int. Conf.Fuzzy Syst., vol. 1, 1997, pp. 281–285.
[44] E. Kim, M. Park, S. Ji, and M. Park, “A new approach to fuzzy mod-eling,” IEEE Trans. Fuzzy Syst., vol. 5, pp. 328–337, 1997.
[45] S. G. Cao, N. W. Rees, and G. Feng, “Analysis and design for a classof complex control systems, Part I: Fuzzy modeling and identification,”Automatica, vol. 33, no. 6, pp. 1017–1039, 1997.
[46] , “Analysis and design for a class of complex control system—PartII: Fuzzy controller design,”Automatica, vol. 33, no. 6, pp. 1029–1039,1997.
[47] M. A. L. Thathachar and P. Viswanath, “On the stability of fuzzy sys-tems,”IEEE Trans. Fuzzy Syst., vol. 5, no. 1, pp. 145–151, 1997.
[48] C. M. Cheng and N. W. Rees, “Stability analysis of fuzzy multivari-able systems: Vector Lyapunov function approach,”IEE Proc.—ControlTheory Appl., vol. 144, no. 5, pp. 403–411, 1997.
[49] H. K. Lam, F. H. F. Leung, and P. K. S. Tam, “On fuzzy control of non-linear systems with large parameter uncertainties: Fuzzy scheduler ap-proach,” inProc. 23rd Int. Conf. Industrial Electronics, Control and In-strumentation, IECON’97, vol. 1, 1997, pp. 364–369.
[50] , “Stable and robust fuzzy controller for uncertain nonlinear sys-tems based on a multiple-grid-point approach,” inProc. 23rd Int. Conf.Industrial Electronics, Control and Instrumentation, IECON’97, vol. 1,1997, pp. 354–359.
[51] , “Design of stable and robust fuzzy controller for uncertain non-linear systems: Lyapunov’s function approach,” inProc. 23rd Int. Conf.Industrial Electronics, Control and Instrumentation, IECON’97, vol. 3,1997, pp. 1046–1051.
[52] , “Stable and robust fuzzy control for uncertain nonlinear systemsbased on a grid-point approach,”Proc. Conf. 6th IEEE Int. Fuzzy Syst.,IEEE/FUZZ’97, vol. 1, pp. 87–92, 1997.
[53] F. H. F. Leung, H. K. Lam, and P. K. S. Tam, “On fuzzy model referenceadaptive control systems: Full-state feedback and output feedback,” inProc. IEEE Int. Symp. Circuits and Syst., ISCAS ’97, vol. 1, 1997, pp.665–668.
[54] H. K. Lam, F. H. F. Leung, and P. K. S. Tam, “Design of stable androbust fuzzy controllers for uncertain nonlinear systems: Three cases,”in Pre-Prints Int. Symp. Artificial Intelligence in Real-Time Control,IFAC/AIRTC’97, 1997, pp. 28–33.
[55] , “Fuzzy control of nonlinear systems with large parameter uncer-tainties based on a fuzzy scheduler,” inPre-Prints Int. Symp. ArtificialIntelligence in Real-Time Control IFAC/AIRTC’97, 1997, pp. 34–37.
[56] S. K. Halgamuge, “A trainable transparent universal approximator fordefuzzication in mamdani-type neuro-fuzzy controllers,”IEEE Trans.Fuzzy Syst., vol. 6, no. 2, pp. 304–313, 1998.
[57] M. French and E. Rogers, “Input/output stability theory for direct neuro-fuzzy controllers,”IEEE Trans. Fuzzy Syst., vol. 6, no. 3, pp. 331–345,1998.
[58] K. C. Sio and C. K. Lee, “Stability of fuzzy PID controllers,”IEEETrans. Syst., Man, Cybern. A, vol. 28, no. 4, pp. 490–495, 1998.
[59] W. Li, “Design of a hybrid fuzzy logic proportional plus conventionalintegral-derivative controller,”IEEE Trans. Fuzzy Syst., vol. 6, no. 4,pp. 449–463, 1998.
[60] C. H. Chou, “Model reference adaptive fuzzy control: A linguistic spaceapproach,”Fuzzy Sets Syst., vol. 96, pp. 1–20, 1998.
[61] J. C. Lo and Y. H. Kuo, “Decoupled fuzzy sliding-mode control,”IEEETrans. Fuzzy Syst., vol. 6, no. 3, pp. 426–435, 1998.
[62] L. K. Wong, F. H. F. Leung, and P. K. S. Tam, “Lyapunov-function-based design of fuzzy logic controllers and its application on combiningcontrollers,”IEEE Trans. Indust. Electron., vol. 45, no. 3, pp. 502–509,1998.
[63] B. Yoo and W. Ham, “Adaptive fuzzy sliding mode control of nonlinearsystem,”IEEE Trans. Fuzzy Syst., vol. 6, no. 2, pp. 315–321, 1998.
[64] H. Ying, “Constructing nonlinear variable gain controllers via thetakagi-sugeno fuzzy control,”IEEE Trans. Fuzzy Syst., vol. 6, no. 2,pp. 226–234, 1998.
[65] , “The takagi-sugeno fuzzy controllers using the simplified linearcontrol rules are nonlinear variable gain controllers,”Automatica, vol.34, no. 2, pp. 157–167, 1998.
[66] , “An analytical study on structure, stability and design of generalnonlinear takagi-sugeno fuzzy control systems,”Automatica, vol. 34,no. 12, pp. 1617–1623, 1998.
[67] X. J. Ma, Z. Q. Sun, and Y. Y. He, “Analysis and design of fuzzy con-troller and fuzzy observer,”IEEE Trans. Fuzzy Syst., vol. 6, no. 1, pp.41–51, 1998.
[68] F. H. F. Leung, H. K. Lam, and P. K. S. Tam, “Adaptive control of mul-tivariable fuzzy systems with unknown parameters,” inProc. IndustrialElectronics Society, IECON ’98, vol. 3, 1998, pp. 1758–1761.
[69] X. Yu, Z. Man, and B. Wu, “Design of fuzzy sliding-mode control sys-tems,”Fuzzy Sets Syst., vol. 95, pp. 295–306, 1998.
[70] S. Y. Yi and M. J. Chung, “Robustness of fuzzy logic control for anuncertain dynamic system,”IEEE Trans. Fuzzy Syst., vol. 6, no. 2, pp.216–225, 1998.
[71] F. H. F. Leung, H. K. Lam, and P. K. S. Tam, “Design of fuzzy controllersfor uncertain nonlinear systems stability and robustness analyzes,”Syst.Control. Lett., vol. 35, pp. 237–243, 1998.
[72] , “Stability and robustness analysis of uncertain multivariable fuzzydigital control systems,” inProc. 1998 IEEE Int. Conf. Fuzzy Syst., 1998.IEEE World Congress on Computational Intelligence, vol. 1, 1998, pp.372–377.
[73] H. K. Lam, F. H. F. Leung, and P. K. S. Tam, “Stability and robust-ness analysis of uncertain multivariable continuous-time nonlinear sys-tems with digital fuzzy controller,” inProc. 1998 IEEE Int. Conf. FuzzySyst., 1998. IEEE World Congress on Computational Intelligence, vol.1, 1998, pp. 498–503.
[74] K. Tanaka, T. Ikeda, and H. O. Wang, “Fuzzy regulators and fuzzyobservers: Relaxed stability conditions and LMI-based designs,”IEEETrans. Fuzzy Syst., vol. 6, no. 2, pp. 250–265, 1998.
[75] K. Tanaka, T. Ikeda, and H. O. Wang, “Backing control problem of amobile robot with multiple trailers: Fuzzy modeling and LMI-based de-sign,” IEEE Trans. Syst. Man, Cybern. C, vol. 28, no. 3, pp. 329–337,1998.
[76] , “A unified approach to controlling chaos via an LMI-based fuzzycontrol system design,”IEEE Trans. Circuit Syst. I, vol. 45, no. 10, pp.1021–1040, 1998.
[77] R. K. Mudi and N. R. Pal, “A robust self-turning scheme for PI- andPD-type fuzzy controllers,”IEEE Trans. Fuzzy Syst., vol. 7, no. 1, pp.2–16, 1999.
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.

840 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000
[78] G. K. I. Mann, B. G. Hu, and R. G. Gosine, “Analysis of direct actionfuzzy PID controller structures,”IEEE Trans. Syst., Man, Cybern., vol.29, no. 3, pp. 371–388, 1999.
[79] Y. Tang, N. Zhang, and Y. Li, “Stable fuzzy adaptive control for a classof nonlinear systems,”Fuzzy Sets Syst., vol. 104, pp. 279–288, 1999.
[80] K. Fischle and D. Schroder, “An improved stable adaptive fuzzy controlmethod,”IEEE Trans. Fuzzy Syst., vol. 7, no. 1, pp. 27–40, 1999.
[81] H. X. Li, “Approximate model reference adaptive mechanism for nom-inal gain design of fuzzy control system,”IEEE Trans. Syst., Man, Cy-bern., vol. 29, no. 1, pp. 41–46, 1999.
[82] S. D. Wang and C. H. Lee, “Fuzzy system modeling using linear distancerules,”Fuzzy Sets Syst., vol. 108, pp. 179–191, 1999.
[83] L. X. Wang, “Automatic design of fuzzy controllers,”Automatica, vol.35, pp. 1471–1475, 1999.
[84] R. Ordonez and K. M. Passino, “Stable multi-inout multi-output adap-tive fuzzy/neural control,”IEEE Trans. Fuzzy Syst., vol. 7, no. 3, pp.345–353, 1999.
[85] S. G. Cao, N. W. Rees, and G. Feng, “Analysis and design of fuzzycontrol systems using dynamic fuzzy state space models,”IEEE Trans.Fuzzy Syst., vol. 7, no. 2, pp. 192–200, 1999.
[86] S. H. Zak, “Stabilizing fuzzy system models using linear controllers,”IEEE Trans. Fuzzy Syst., vol. 7, no. 2, pp. 236–240, 1999.
[87] E. Kim, H. J. Kang, and M. Park, “Numerical stability analysis of fuzzycontrol systems via quadratic programming and linear matrix inequali-ties,” IEEE Trans. Syst., Man, Cybern. A, vol. 29, no. 4, pp. 333–346,1999.
[88] M. Vidyasagar,Nonlinear Systems Analysis. Englewood Cliffs, NJ:Prentice-Hall, 1993.
[89] H. K. Lam, F. H. F. Leung, and P. K. S. Tam, “Design of stable androbust fuzzy controllers for uncertain multivariable nonlinear systems,”in Stability Issues in Fuzzy Control, J. Aracil, Ed. New York: Springer-Verlag, pp. 125–164.
[90] T. A. Johansen, “Fuzzy model based control: Stability, robustness andperformance issues,”IEEE Trans. Fuzzy Syst., vol. 2, no. 3, pp. 221–234,1994.
[91] T. A. Ray, T. A. Ananda, and T. A. Majunder, “L_2 stability and therelated design concept for SISO linear systems associated with fuzzylogic controllers,”IEEE Trans. Syst., Man, Cybern., vol. SMC-14, no.6, pp. 932–939, 1984.
Neighborhood Detection and Rule Selection from CellularAutomata Patterns
Yingxu Yang and S. A. Billings
Abstract—Using Genetic Algorithms (GAs) to search for cellular au-tomation (CA) rules from spatio-temporal patterns produced in CA evo-lution is usually complicated and time-consuming when both the neighbor-hood structure and the local rule are searched simultaneously. The com-plexity of this problem motivates the development of a new search whichseparates the neighborhood detection from the GA search. In this paper,the neighborhood is determined by independently selecting terms from alarge term set on the basis of the contribution each term makes to the nextstate of the cell to be updated. The GA search is then started with a consid-erably smaller set of candidate rules pre-defined by the detected neighbor-hood. This approach is tested over a large set of one-dimensional (1-D) andtwo-dimensional (2-D) CA rules. Simulation results illustrate the efficiencyof the new algorithm.
Index Terms—Cellular automata, genetic algorithms, identification,spatio-temporal systems.
I. INTRODUCTION
A cellular automaton (CA) is a discrete system which evolves in dis-crete time over a lattice structure composed of a large quantity of cells.The states of the cells are discrete and are updated synchronously ac-cording to a local rule operating on a given neighborhood. The studyof low-dimensional CAs has been the focus of attention from a widerange of researchers [1]–[6]. One of the most important topics in CAstudies is the identification of the CA, that is, to extract the neighbor-hood and the governing local rule from a given set of spatio-temporalpatterns produced by the CA evolution.
Ideally, the identification technique should be designed to producean optimal CA expression which consists of a clear, minimal neighbor-hood structure and a correct local rule. In [7], although correct ruleswere generated by applying a set of sequential and parallel algorithms,the associated neighborhood was not clearly presented and the identi-fication process was complicated and time-consuming. Genetic Algo-rithms (GAs) were employed in [8] in search for a matching rule from alarge rule set of all possible rules. Again, no satisfactory neighborhoodstructure was obtained. In [9], the minimal neighborhood problem wasaddressed by introducing a second search objective to the GAs on thebasis of reformulating the CA rules into a uniform Boolean expression.Because the assumed neighborhood which determines the run time isusually much larger than the actual neighborhood, the search processcan be very long, sometimes taking several hours for a single run, evenfor a very simple one-dimensional (1-D) CA rule (see [9, Table VI]).However it might be possible to substantially reduce the run time if theassumed neighborhood for the GA search was correct and minimal.One way to achieve this would be to determine the neighborhood be-fore starting the rule search and this is the main objective of the presentstudy.
In this paper, a new neighborhood detection technique is introducedwhich is capable of extracting the correct and minimal neighborhoodfrom a large set of candidate neighborhoods without having to define
Manuscript received April 30, 1999; revised July 14, 2000. This work wassupported by the University of Sheffield and UK EPSRC. This paper was rec-ommended by Associate Editor W. Pedrycz.
The authors are with the Department of Automatic Control and Systems En-gineering, University of Sheffield, Sheffield S1 3JD, U.K.
Publisher Item Identifier S 1083-4427(00)09030-5.
1083–4427/00$10.00 © 2000 IEEE
Authorized licensed use limited to: Hong Kong Polytechnic University. Downloaded on July 7, 2009 at 03:38 from IEEE Xplore. Restrictions apply.