Stabilization and Passivity-based Control
38
DISC Systems and Control Theory of Nonlinear Systems, 2010 1 Stabilization and Passivity-Based Control Lecture 8 Nonlinear Dynamical Control Systems, Chapter 10, plus handout from R. Sepulchre, Constructive Nonlinear Control (pp.25–70, pp.229–239) available at www.montefiore.ulg.ac.be/˜sepulch
-
Upload
sunoval2013 -
Category
Documents
-
view
21 -
download
3
description
tutorial on passivity-based control for dynamic systems.
Transcript of Stabilization and Passivity-based Control

DISC Systems and Control Theory of Nonlinear Systems, 2010 1
Stabilization and Passivity-Based Control
Lecture 8
Nonlinear Dynamical Control Systems, Chapter 10,
plus handout from
R. Sepulchre, Constructive Nonlinear Control (pp.25–70, pp.229–239)
available at www.montefiore.ulg.ac.be/˜sepulch

DISC Systems and Control Theory of Nonlinear Systems, 2010 2
Standard definitions on the stability of an autonomous system
x = f(x)
where x = (x1, . . . , xn) are local coordinates for X .
Let x0 be an equilibrium point, i.e.
f(x0) = 0 .
The equilibrium point x0 is stable if for any neighborhood V of x0
there exists a neighborhood V of x0 such that if x ∈ V , then the
solution x(t, 0, x) belongs to V for all t ≥ 0.
The equilibrium x0 is unstable if it is not stable.
The equilibrium x0 is (locally) asymptotically stable if x0 is stable
and there exists a neighborhood V0 of x0 such that all solutions
x(t, 0, x) with x ∈ V0, converge to x0 as t → ∞.
The equilibrium x0 is globally asymptotically stable if V0 = X

DISC Systems and Control Theory of Nonlinear Systems, 2010 3
In Lyapunov’s first method the local stability of x0 is related to
the stability of the linearization around the equilibrium point
˙x = Ax ,
with
A =∂f
∂x(x0) .
Theorem 1 (First method of Lyapunov) The equilibrium x0 is
asymptotically stable if the matrix A is asymptotically stable, i.e.,
the matrix A has all its eigenvalues in the open left half plane. The
equilibrium point x0 is unstable if at least one of the eigenvalues of
the matrix A has a positive real part.

DISC Systems and Control Theory of Nonlinear Systems, 2010 4
Consider the control system
x = f(x, u) ,
where x = (x1, . . . , xn) are local coordinates for a smooth manifold
X , u = (u1, . . . , um) ∈ U ⊂ Rm, the input space, and f(·, u) a smooth
vector field for each u ∈ U .
We assume U to be an open part of Rm and that f depends
smoothly on the controls u.
Let (x0, u0) an equilibrium point:
f(x0, u0) = 0 .
(N.B.: usually u0 = 0.)

DISC Systems and Control Theory of Nonlinear Systems, 2010 5
Problem 2 Under which conditions does there exist a smooth
strict static state feedback u = α(x), α : X → U , with α(x0) = u0,
such that the closed loop system
x = f(x, α(x))
has x0 as an asymptotically stable equilibrium?

DISC Systems and Control Theory of Nonlinear Systems, 2010 6
Consider the linearization of the system around the point (x0, u0)
˙x = Ax + Bu ,
where
A =∂f
∂x(x0, u0) , B =
∂f
∂u(x0, u0) .
Define R as the reachable subspace of the linearized system
R = im[
B AB · · · An−1B]
Clearly R is invariant under A, i.e., AR ⊂ R, so after a linear
change of coordinates
d
dt
x1
x2
=
A11 A12
0 A22
x1
x2
+
B1
0
u
where the vectors (x1, 0)T correspond to vectors in R.

DISC Systems and Control Theory of Nonlinear Systems, 2010 7
Theorem 3 The feedback stabilization problem admits a local
solution around x0 if all eigenvalues of the matrix A22 are in C−,
the open left half plane of C. Moreover if one of the eigenvalues of
A22 has a positive real part, then there does not exist a solution to
the local feedback stabilization problem.

DISC Systems and Control Theory of Nonlinear Systems, 2010 8
Consider the linearized dynamics around (x0, u0) and assume all
eigenvalues of A22 belong to C−. Then by linear control theory
there is a linear state feedback u = F x which asymptotically
stabilizes the linearized system. (We may actually take u = F1x1.)
Then the affine feedback u = u0 + F (x− x0) for the nonlinear system
yields the closed loop system
x = f(x, u0 + F (x − x0)) ,
of which the linearization around x0 equals
˙x = (A + BF )x .
By construction this linear dynamics is asymptotically stable and so
by Lyapunov’s first method x0 is an asymptotically stable
equilibrium point.

DISC Systems and Control Theory of Nonlinear Systems, 2010 9
Next suppose that at least one of the eigenvalues of the matrix A22
has a positive real part. Let u = α(x) be an arbitrary smooth
feedback with α(x0) = u0. Linearizing the dynamics around x0 yields
˙x = (A + B∂α
∂x(x0))x ,
which still has the same unstable eigenvalue of the matrix A22, and
thus x0 is an unstable equilibrium point of the closed loop system.

DISC Systems and Control Theory of Nonlinear Systems, 2010 10
One step further by using center manifold theory
Suppose the set of eigenvalues of A, σ(A), can be written as the
disjoint union
σ(A) = σ− ∪ σ0 ,
where the eigenvalues in σ− lie in the open left half plane and those
in σ0 lie on the imaginary axis. Let l be the number of eigenvalues
(counted with their multiplicity) contained in σ−, so that there are
n − l eigenvalues (counted with their multiplicity) in σ0 .
Then there exists a linear coordinate transformation T such that
TAT−1 =
A0 0
0 A−
where the (n − l, n − l)-matrix A0 and the (l, l)-matrix A− have as
eigenvalues σ(A0) = σ0, respectively σ(A−) = σ−.

DISC Systems and Control Theory of Nonlinear Systems, 2010 11
In the transformed coordinates z = Tx − x0 the nonlinear system
takes the form
z1 = A0z1 + f0(z1, z2)
z2 = A−z2 + f−(z1, z2)
where
f0(0, 0) = 0 ,
f−(0, 0) = 0 ,
df0(0, 0) = 0 ,
df−(0, 0) = 0 .

DISC Systems and Control Theory of Nonlinear Systems, 2010 12
Theorem 4 (Center Manifold Theorem) For each k = 2, 3, . . .
there exists a δk > 0 and a Ck-mapping
φ : {z1 ∈ Rn−l | ||z1|| < δk} → Rl with φ(0) = 0 and dφ(0) = 0, such that
the submanifold (the center manifold)
z2 = φ(z1) , ||z1|| < δk ,
is invariant under the nonlinear dynamics.
Remark 5 (i) In general the nonlinear dynamics does not possess
a unique center manifold, but may have an infinite number of such
invariant manifolds.
(ii) The smooth dynamics has a Ck center manifold for each
(finite) k = 2, 3, . . .. However the size of the center manifold (δk
depends on k and may shrink with increasing k. Even in case the
system is analytic, there does not necessarily exist an analytic
center manifold.

DISC Systems and Control Theory of Nonlinear Systems, 2010 13
Theorem 6 The dynamics on the center manifold are given as
z1 = A0z1 + f0(z1, φ(z1)) .
If z1 = 0 is asymptotically stable, stable, or unstable, respectively,
for this center manifold dynamics then (z1, z2) = 0 is asymptotically
stable, stable or unstable for the full-order system.
The linearized system resulting from applying the linear feedback
u = u0 + F1(x1 − x1
0) + F2(x2 − x2
0)
A11 + B1F1 A12 + B1F2
0 A22
Although the matrix F2 does not affect the eigenvalues, it does
affect the orientation of the imaginary eigenspace, and thus the
dynamics on the center manifold.

DISC Systems and Control Theory of Nonlinear Systems, 2010 14
Second or direct method of Lyapunov
A smooth function L defined on some neighborhood V of x0 is
positive definite if L(x0) = 0 and L(x) > 0 for all x 6= x0.
A set W in M is an invariant set if for all x ∈ W the solutions
x(t, 0, x) belong to W for all t.
Theorem 7 (Second method of Lyapunov) Consider the
dynamics x = f(x) around the equilibrium point x0. Let L be a
positive definite function on some neighborhood V0 of x0. Then x0
is stable if
LfL(x) ≤ 0 , ∀x ∈ V0
The function L is called a Lyapunov function.

DISC Systems and Control Theory of Nonlinear Systems, 2010 15
Furthermore, x0 is asymptotically stable if
LfL(x) < 0 , ∀x 6= x0
or more generally if the largest invariant set contained in the set
W = {x ∈ V0 |LfL(x) = 0}
equals {x0}; i.e. the only solution x(t, 0, x) starting in x ∈ W which
remains in W for all t ≥ 0, coincides with x0.
(This called LaSalle’s Invariance principle.)

DISC Systems and Control Theory of Nonlinear Systems, 2010 16
Consider the system
x = f(x) +
m∑
i=1
gi(x)ui
with
f(x0) = 0 .
Suppose there exists a Lyapunov function L for the dynamics with
u ≡ 0
LfL(x) ≤ 0 , ∀x ∈ V0 .
so x0 is already stable for the system with u = 0.

DISC Systems and Control Theory of Nonlinear Systems, 2010 17
Consider the smooth feedback u = α(x) defined as
αi(x) = −LgiL(x) , i = 1, . . . , m , x ∈ V0
yielding the closed loop behavior
x = f(x) +m
∑
i=1
gi(x)αi(x) .
satisfying
LfL(x) +m
∑
i=1
LαigiL(x) = LfL(x) −
m∑
i=1
(LgiL(x))2 ≤ 0 ,

DISC Systems and Control Theory of Nonlinear Systems, 2010 18
In order to study the asymptotic stability of x0 we introduce the set
W = {x ∈ V0 |LfL(x) −∑m
i=1(LgiL(x))2 = 0}
= {x ∈ V0 |LfL(x) = 0, LgiL(x) = 0, i ∈ m}.
Let W0 be the largest invariant subset of W under the dynamics.
Observe that any trajectory xα(t, 0, x) in W0 is a trajectory of the
original dynamics; this because the feedback u = α(x) is identically
zero for each point in W .

DISC Systems and Control Theory of Nonlinear Systems, 2010 19
Consider the distribution
D(x) = span{f(x), adkfgi(x), i ∈ m, k ≥ 0} , x ∈ V0 .
Lemma 8 Suppose there exists a Lyapunov-function L for x = f(x)
on a neighborhood V0 of the equilibrium point x0. Suppose that
dimD(x0) = n ,
which implies that on some neighborhood V0 ⊂ V0 of x0
dimD(x) = n .
Then x0 is asymptotically stable for the closed loop system. The
same holds if
dimD(x) = n , for all x ∈ V0 \ {x0}

DISC Systems and Control Theory of Nonlinear Systems, 2010 20
Example 9 Consider the equations for the angular velocities of a
rigid body with one external torque
Iω = S(ω)Iω + bu
with ω = (ω1, ω2, ω3),
S(ω) =
0 ω3 −ω2
−ω3 0 ω1
ω2 −ω1 0
I =
I1 0 0
0 I2 0
0 0 I3
I3 > I2 > I1 > 0 denote the principal moments of inertia. Let
I23 = (I2 − I3)/I1 ,
I31 = (I3 − I1)/I2 ,
I12 = (I1 − I2)/I3 .

DISC Systems and Control Theory of Nonlinear Systems, 2010 21
Then the dynamics may be written as
ω1 = I23ω2ω3 + c1u
ω2 = I31ω3ω1 + c2u
ω3 = I12ω1ω2 + c3u
with c = (c1, c2, c3)T = I−1b. An obvious choice for a Lyapunov
function for the drift vector field is the kinetic energy of the rigid
body, i.e.
L(ω) = 12 (I1ω
21 + I2ω
22 + I3ω
23) .
L is a smooth positive definite function having a unique minimum
at ω = 0. Computing LfL yields
LfL(ω) = I1I23ω1ω2ω3 + I2I31ω1ω2ω3 + I3I12ω1ω2ω3 = 0 ,
which shows that ω = 0 is a stable equilibrium point when u = 0.

DISC Systems and Control Theory of Nonlinear Systems, 2010 22
Define the smooth feedback
u = −LcL(ω) = −(c1I1ω1 + c2I2ω2 + c3I3ω3) .
Assume that
c1c2c3 6= 0 .
(So the control axis is not perpendicular to any of the principal
axes of the rigid body.)
Then the above feedback asymptotically stabilizes ω = 0.

DISC Systems and Control Theory of Nonlinear Systems, 2010 23
Passive systems theory
A system with outputs
x = f(x) + g(x)u
y = h(x)
is called passive if there exists a function S(x) with S(x) ≥ 0 for all
x if and only ifd
dtS ≤ yT u
In physical situations S is often the ’stored energy’ in the system,
while yT u is the supplied power. Formally, S(x) is called the
storage function and s(y, u) = yT u the supply rate.

DISC Systems and Control Theory of Nonlinear Systems, 2010 24
ddt
S ≤ yT u is equivalent to
∂T S
∂x(x)[f(x) + g(x)u] ≤ hT (x)u
for all x and u, or equivalently
LfS(x) = ∂T S∂x
(x)f(x) ≤ 0
h(x) = gT (x)∂S∂x
(x)
Hence, passivity can be regarded as an extension of the notion of
Lyapunov function.

DISC Systems and Control Theory of Nonlinear Systems, 2010 25
Furthermore, the above feedback u = α(x) can be seen to be equal
to
u = −gT (x)∂S
∂x(x) = −y
leading tod
dtS ≤ yT u = −||y||2
and asymptotic stability of a minimum of S is guaranteed if the
largest invariant subset contained in the set where the passive
output y is equal to zero is equal to this minimum.

DISC Systems and Control Theory of Nonlinear Systems, 2010 26
Two fundamental properties of passive systems
1) In general a passive system has uniform relative degree 1.
Indeed, since
yj = LgjS
the input-output decoupling matrix is generally given as
[LgiLgj
S]i,j=1,··· ,p
which has full rank if the Hessian matrix of the storage function S
has full rank.
2) The zero-dynamics of a passive system is stable. Indeed, by
substituting y = 0 in ddt
S ≤ yT u it follows that the zero-dynamics
satisfiesd
dtS ≤ 0

DISC Systems and Control Theory of Nonlinear Systems, 2010 27
Both properties are if and only if conditions for ’passifiability’.
Rewrite the system satisfying both conditions as
z = q(z, ξ)
ξ = a(z, ξ) + b(z, ξ)u
y = ξ
with b(z, ξ) full rank. Furthermore, factorize
q(z, ξ) = q(z, 0) + p(z, ξ)ξ
Since q(z, 0) is asymptotically stable there exists a Lyapunov
function W (z) for z = q(z, 0). Then
S(z, ξ) := W (z) +1
2ξT ξ
is a Lyapunov function for the system after applying the feedback
u = b−1(z, ξ)(−a(z, ξ) − Lp(z,ξ)W + v)

DISC Systems and Control Theory of Nonlinear Systems, 2010 28
Passivity interpretation of ’backstepping’ procedure for
stabilization
Suppose we want to stabilize the system
x1 = f1(x1, x2)
x2 = f2(x1, x2, x3)
x3 = f3(x1, x2, x3, u)
Construct a ’passive output’
y = x3 − α2(x1, x2)
such that the zero-dynamics
x1 = f1(x1, x2)
x2 = f2(x1, x2, α2(x1, x2))
is asymptotically stable.

DISC Systems and Control Theory of Nonlinear Systems, 2010 29
How to find α(x1, x2) ? This is a stabilization problem for a
reduced-order dynamics. Can be solved by constructing a ’passive’
output
y = x2 − α1(x1)
such that the zero dynamics
x1 = f1(x1, α1(x1))
is asymptotically stable.
This procedure can be generalized to arbitrary systems that are
feedback linearizable.

DISC Systems and Control Theory of Nonlinear Systems, 2010 30
Dual interpretation
Stabilize
x1 = f1(x1, x2)
x2 = f2(x1, x2, x3)
x3 = f3(x1, x2, x3, u)
by working ’top-down’: first consider the system
x1 = f1(x1, v)
and construct a stabilizing feedback v = β1(x1). Define a new
coordinate
z2 = x2 − β(x1)

DISC Systems and Control Theory of Nonlinear Systems, 2010 31
and rewrite the system as
x1 = f1(x1, β(x1) + z2)
z2 = f2(x1, z2, x3)
x3 = f3(x1, z2, x3, u)
and stabilize the first two lines by a feedback x3 = β2(x1, z2), etc.

DISC Systems and Control Theory of Nonlinear Systems, 2010 32
Passivity is a compositional property
Consider k passive subsystems with input-output pairs
ui, yi, i = 1, · · · , k and storage functions Si(xi), interconnected in
such a way that
yT1 u1 + yT
2 u2 + · · · + yTk uk = yT u
Then the overall system is again passive with storage function
S1(x1) + S2(x2) + · · · + Sk(xk)

DISC Systems and Control Theory of Nonlinear Systems, 2010 33
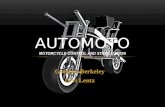
From a network modeling point of view, passive systems arise as
port-Hamiltonian systems:
Port-based network modeling leads to a representation of a
physical system as a graph, where each edge is decorated with a
(vector) pair of flow variables f ∈ Rm, and effort variables
e ∈ Rm, i.e., a bond graph
H1 fH1
eH1
0
R1
1
IC : f = 0
T H2
H3 0fR2
eR2
R2
Figure 1: Port-based network modeling

DISC Systems and Control Theory of Nonlinear Systems, 2010 34
and each vertex corresponds to one of the following ideal elements:
• Energy-storing elements H:
x = −fH
eH = ∂H∂x
(x), H(x1, · · · , xm) ∈ R energy
• Power-dissipating elements R:
R(fR, eR) = 0, eTRfR ≤ 0
• Power-conserving elements: transformers T, gyrators GY, ideal
constraints IC.
• 0- and 1-junctions:
e1 = e2 = · · · = ek, f1 + f2 + · · · + fk = 0
f1 = f2 = · · · = fk, e1 + e2 + · · · + ek = 0

DISC Systems and Control Theory of Nonlinear Systems, 2010 35
• 0- and 1-junctions are the basic conservation laws of the
system, and are also power-conserving:
e1f1 + e2f2 + · · · + ekfk = 0
• Transformers, gyrators are energy-routing devices, and may
correspond to exchange between different types of energy.
All power-conserving elements have the following properties in
common. They are described by linear equations:
Ff + Ee = 0, f, e ∈ Rl
whose solutions f, e satisfy
eT f = e1f1 + e2f2 + · · · + elfl = 0,
rank[
F E]
= l
All power-conserving elements taken together define a Dirac
structure.

DISC Systems and Control Theory of Nonlinear Systems, 2010 36
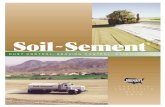
A geometric definition of port-based network models
Take all power-conserving elements
(T, G, IC, 0- and 1-junctions)
together in a single power-conserving interconnection structure:
H1fH1
eH1
0
R1
1
IC : f = 0
T H2
H3 0fR2
eR2
R2
D
Figure 2: Power-conserving interconnection structure

DISC Systems and Control Theory of Nonlinear Systems, 2010 37
Input-state-output port-Hamiltonian systems:
Particular case is a Dirac structure D(x) ⊂ TxX × T ∗
xX × F × F∗
given as the graph of the skew-symmetric map
fx
eP
=
−J(x) −g(x)
gT (x) 0
ex
fP
,
leading (fx = −x, ex = ∂H∂x
(x)) to a port-Hamiltonian system as
before
x = J(x)∂H∂x
(x) + g(x)fP , x ∈ X , fP ∈ Rm
eP = gT (x)∂H∂x
(x), eP ∈ Rm

DISC Systems and Control Theory of Nonlinear Systems, 2010 38
Power-dissipation is included by terminating some of the ports by
static resistive elements
fR = −F (eR), where eTRF (eR) ≥ 0, for all eR.
d
dtH ≤ eT
P fP
This leads, e.g. for linear damping, to input-state-output
port-Hamiltonian systems in the form
x = [J(x) − R(x)]∂H∂x
(x) + g(x)fP
eP = gT (x)∂H∂x
(x)
where J(x) = −JT (x), R(x) = RT (x) ≥ 0 are the interconnection and
damping matrices, respectively.