
Stability, Stabilizability and Control of certain classes ...
137
Positive Systems and Compartmental Systems Feedback stabilization of Compartmental Systems Stability, Stabilizability and Control of certain classes of Positive Systems Irene Zorzan Ph.D. Advisor: Prof. Maria Elena Valcher Ph.D. School in Information Engineering - University of Padova February 22, 2018 Irene Zorzan Stability, stabilizability and control of Positive Systems 1/31
Transcript of Stability, Stabilizability and Control of certain classes ...
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Stability, Stabilizability andControl of certain classes of
Positive Systems
Irene Zorzan
Ph.D. Advisor: Prof. Maria Elena Valcher
Ph.D. School in Information Engineering - University of Padova
February 22, 2018
Irene Zorzan Stability, stabilizability and control of Positive Systems 1/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Outline of the talk
Positive Systems: definition and motivations
Control of Positive Multi-Agent SystemsOptimal control of Positive Bilinear SystemsStability and stabilizability of Compartmental Switched Systems
Feedback stabilization of Compartmental Systems
Irene Zorzan Stability, stabilizability and control of Positive Systems 2/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Outline of the talk
Positive Systems: definition and motivations
Control of Positive Multi-Agent SystemsOptimal control of Positive Bilinear SystemsStability and stabilizability of Compartmental Switched Systems
Feedback stabilization of Compartmental Systems
Irene Zorzan Stability, stabilizability and control of Positive Systems 2/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Outline of the talk
Positive Systems: definition and motivations
Control of Positive Multi-Agent SystemsOptimal control of Positive Bilinear SystemsStability and stabilizability of Compartmental Switched Systems
Feedback stabilization of Compartmental Systems
Irene Zorzan Stability, stabilizability and control of Positive Systems 2/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems
Positive Systemsnonnegative state and output variablesfor every nonnegative initial condition
and every nonnegative input
Irene Zorzan Stability, stabilizability and control of Positive Systems 3/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems
Positive Systemsnonnegative state and output variablesfor every nonnegative initial condition
and every nonnegative input
pressuresabsolute temperaturesconcentrations of substancespopulation levelsprobabilities
Irene Zorzan Stability, stabilizability and control of Positive Systems 3/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems
Positive Systemsnonnegative state and output variablesfor every nonnegative initial condition
and every nonnegative input
pressuresabsolute temperaturesconcentrations of substancespopulation levelsprobabilities
economicssystem biologycongestion controlpharmacokineticspower networks
Irene Zorzan Stability, stabilizability and control of Positive Systems 3/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems: state-space representation
Consider a continuous-time linear system described by
x(t) = Ax(t) +Bu(t) (1)
Irene Zorzan Stability, stabilizability and control of Positive Systems 4/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems: state-space representation
Consider a continuous-time linear system described by
x(t) = Ax(t) +Bu(t) (1)
wherex is the n-dimensional state vector
u is the m-dimensional input vectorA, B are matrices of consistent dimensions
Irene Zorzan Stability, stabilizability and control of Positive Systems 4/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems: state-space representation
Consider a continuous-time linear system described by
x(t) = Ax(t) +Bu(t) (1)
wherex is the n-dimensional state vectoru is the m-dimensional input vector
A, B are matrices of consistent dimensions
Irene Zorzan Stability, stabilizability and control of Positive Systems 4/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems: state-space representation
Consider a continuous-time linear system described by
x(t) = Ax(t) +Bu(t) (1)
wherex is the n-dimensional state vectoru is the m-dimensional input vectorA, B are matrices of consistent dimensions
Irene Zorzan Stability, stabilizability and control of Positive Systems 4/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems: state-space representation
Consider a continuous-time linear system described by
x(t) = Ax(t) +Bu(t) (1)
wherex is the n-dimensional state vectoru is the m-dimensional input vectorA, B are matrices of consistent dimensions
System (1) is a Positive System if and only if
A is a Metzler matrixA square matrix is Metzler if all its off-diagonal entries are nonnegative.
B is a positive matrixA matrix is positive if all its entries are nonnegative.
Irene Zorzan Stability, stabilizability and control of Positive Systems 4/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems: state-space representation
Consider a continuous-time linear system described by
x(t) = Ax(t) +Bu(t) (1)
wherex is the n-dimensional state vectoru is the m-dimensional input vectorA, B are matrices of consistent dimensions
System (1) is a Positive System if and only ifA is a Metzler matrixA square matrix is Metzler if all its off-diagonal entries are nonnegative.
B is a positive matrixA matrix is positive if all its entries are nonnegative.
Irene Zorzan Stability, stabilizability and control of Positive Systems 4/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Systems: state-space representation
Consider a continuous-time linear system described by
x(t) = Ax(t) +Bu(t) (1)
wherex is the n-dimensional state vectoru is the m-dimensional input vectorA, B are matrices of consistent dimensions
System (1) is a Positive System if and only ifA is a Metzler matrixA square matrix is Metzler if all its off-diagonal entries are nonnegative.
B is a positive matrixA matrix is positive if all its entries are nonnegative.
Irene Zorzan Stability, stabilizability and control of Positive Systems 4/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: set-up
Irene Zorzan Stability, stabilizability and control of Positive Systems 5/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: set-up
1 2
i
...
... N
N identical Positive Single-Input Systems:
xi(t) = Axi(t) +Bui(t), i ∈ [1, N ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 5/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: set-up
1 2
i
...
... N
N identical Positive Single-Input Systems:
xi(t) = Axi(t) +Bui(t), i ∈ [1, N ]
Undirected, weighted and connected com-munication graph:
G = (V, E ,A)
Irene Zorzan Stability, stabilizability and control of Positive Systems 5/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: set-up
1 2
i
...
... N
N identical Positive Single-Input Systems:
xi(t) = Axi(t) +Bui(t), i ∈ [1, N ]
Undirected, weighted and connected com-munication graph:
G = (V, E ,A)
Assume that A is non-Hurwitz and that (A,B) is stabilizable.
Irene Zorzan Stability, stabilizability and control of Positive Systems 5/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus: problem formulation
1 2
i
...
... N
Each agent adopts the state-feedback con-trol law
ui(t) = K
N∑j=1
Aij [xj(t)− xi(t)]
Irene Zorzan Stability, stabilizability and control of Positive Systems 6/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus: problem formulation
1 2
i
...
... N
Each agent adopts the state-feedback con-trol law
ui(t) = K
N∑j=1
Aij [xj(t)− xi(t)]
where K ∈ R1×n is a matrix to be designed.
Irene Zorzan Stability, stabilizability and control of Positive Systems 6/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus: problem formulation
1 2
i
...
... N
Each agent adopts the state-feedback con-trol law
ui(t) = K
N∑j=1
Aij [xj(t)− xi(t)]
where K ∈ R1×n is a matrix to be designed.
Positive consensus problem:determine a feedback matrix K ∈ R1×n such that:
i) positivity of the overall dynamics is preservedii) all the agents achieve consensus, namely for every i, j ∈ [1, N ]
it holds limt→+∞ xi(t)− xj(t) = 0
Irene Zorzan Stability, stabilizability and control of Positive Systems 6/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus: problem formulation
1 2
i
...
... N
Each agent adopts the state-feedback con-trol law
ui(t) = K
N∑j=1
Aij [xj(t)− xi(t)]
where K ∈ R1×n is a matrix to be designed.
Positive consensus problem:determine a feedback matrix K ∈ R1×n such that:
i) positivity of the overall dynamics is preserved
ii) all the agents achieve consensus, namely for every i, j ∈ [1, N ]it holds limt→+∞ xi(t)− xj(t) = 0
Irene Zorzan Stability, stabilizability and control of Positive Systems 6/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus: problem formulation
1 2
i
...
... N
Each agent adopts the state-feedback con-trol law
ui(t) = K
N∑j=1
Aij [xj(t)− xi(t)]
where K ∈ R1×n is a matrix to be designed.
Positive consensus problem:determine a feedback matrix K ∈ R1×n such that:
i) positivity of the overall dynamics is preservedii) all the agents achieve consensus, namely for every i, j ∈ [1, N ]
it holds limt→+∞ xi(t)− xj(t) = 0
Irene Zorzan Stability, stabilizability and control of Positive Systems 6/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: motivations
In several contexts where consensus problems arise, the positivityof the overall controlled system is an intrinsic feature that should betaken into consideration when formalizing the problem.
Irene Zorzan Stability, stabilizability and control of Positive Systems 7/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: motivations
In several contexts where consensus problems arise, the positivityof the overall controlled system is an intrinsic feature that should betaken into consideration when formalizing the problem.This is the case, for instance, when dealing with
sensor networks for greenhouse monitoring
CO2 concentrationhumidity levellight intensity
fleet of cooperating hybrid vehicles
CO2 emission levelelectric/combustion based propulsion
Irene Zorzan Stability, stabilizability and control of Positive Systems 7/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: motivations
In several contexts where consensus problems arise, the positivityof the overall controlled system is an intrinsic feature that should betaken into consideration when formalizing the problem.This is the case, for instance, when dealing with
sensor networks for greenhouse monitoringCO2 concentrationhumidity levellight intensity
fleet of cooperating hybrid vehicles
CO2 emission levelelectric/combustion based propulsion
Irene Zorzan Stability, stabilizability and control of Positive Systems 7/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: motivations
In several contexts where consensus problems arise, the positivityof the overall controlled system is an intrinsic feature that should betaken into consideration when formalizing the problem.This is the case, for instance, when dealing with
sensor networks for greenhouse monitoringCO2 concentrationhumidity levellight intensity
fleet of cooperating hybrid vehicles
CO2 emission levelelectric/combustion based propulsion
Irene Zorzan Stability, stabilizability and control of Positive Systems 7/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive consensus problem: motivations
In several contexts where consensus problems arise, the positivityof the overall controlled system is an intrinsic feature that should betaken into consideration when formalizing the problem.This is the case, for instance, when dealing with
sensor networks for greenhouse monitoringCO2 concentrationhumidity levellight intensity
fleet of cooperating hybrid vehiclesCO2 emission levelelectric/combustion based propulsion
Irene Zorzan Stability, stabilizability and control of Positive Systems 7/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
wherex is the n-dimensional state vector
w is an arbitrary n-dimensional external disturbancey is the p-dimensional output vectorui, i ∈ [1,M ], are the scalar control inputsA is an n× n Metzler matrixDi, i ∈ [1,M ], are n× n diagonal matricesC is a p× n nonnegative matrix
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
wherex is the n-dimensional state vectorw is an arbitrary n-dimensional external disturbance
y is the p-dimensional output vectorui, i ∈ [1,M ], are the scalar control inputsA is an n× n Metzler matrixDi, i ∈ [1,M ], are n× n diagonal matricesC is a p× n nonnegative matrix
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
wherex is the n-dimensional state vectorw is an arbitrary n-dimensional external disturbancey is the p-dimensional output vector
ui, i ∈ [1,M ], are the scalar control inputsA is an n× n Metzler matrixDi, i ∈ [1,M ], are n× n diagonal matricesC is a p× n nonnegative matrix
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
wherex is the n-dimensional state vectorw is an arbitrary n-dimensional external disturbancey is the p-dimensional output vectorui, i ∈ [1,M ], are the scalar control inputs
A is an n× n Metzler matrixDi, i ∈ [1,M ], are n× n diagonal matricesC is a p× n nonnegative matrix
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
wherex is the n-dimensional state vectorw is an arbitrary n-dimensional external disturbancey is the p-dimensional output vectorui, i ∈ [1,M ], are the scalar control inputsA is an n× n Metzler matrix
Di, i ∈ [1,M ], are n× n diagonal matricesC is a p× n nonnegative matrix
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
wherex is the n-dimensional state vectorw is an arbitrary n-dimensional external disturbancey is the p-dimensional output vectorui, i ∈ [1,M ], are the scalar control inputsA is an n× n Metzler matrixDi, i ∈ [1,M ], are n× n diagonal matrices
C is a p× n nonnegative matrix
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
wherex is the n-dimensional state vectorw is an arbitrary n-dimensional external disturbancey is the p-dimensional output vectorui, i ∈ [1,M ], are the scalar control inputsA is an n× n Metzler matrixDi, i ∈ [1,M ], are n× n diagonal matricesC is a p× n nonnegative matrix
Irene Zorzan Stability, stabilizability and control of Positive Systems 8/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Optimal control of Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Irene Zorzan Stability, stabilizability and control of Positive Systems 9/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Optimal control of Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Assume that the Metzler matrix A is non-Hurwitz.
Irene Zorzan Stability, stabilizability and control of Positive Systems 9/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Optimal control of Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Assume that the Metzler matrix A is non-Hurwitz.
Optimal robust control problem:determine ui ∈ R+, i ∈ [1,M ], with the following characteristics:
i) satisfy the constraint∑M
i=1 ui < 1
ii) make the system asymptotically stableiii) maximize system robustness against the external disturbance
Irene Zorzan Stability, stabilizability and control of Positive Systems 9/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Optimal control of Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Assume that the Metzler matrix A is non-Hurwitz.
Optimal robust control problem:determine ui ∈ R+, i ∈ [1,M ], with the following characteristics:
i) satisfy the constraint∑M
i=1 ui < 1
ii) make the system asymptotically stableiii) maximize system robustness against the external disturbance
Irene Zorzan Stability, stabilizability and control of Positive Systems 9/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Optimal control of Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Assume that the Metzler matrix A is non-Hurwitz.
Optimal robust control problem:determine ui ∈ R+, i ∈ [1,M ], with the following characteristics:
i) satisfy the constraint∑M
i=1 ui < 1
ii) make the system asymptotically stable
iii) maximize system robustness against the external disturbance
Irene Zorzan Stability, stabilizability and control of Positive Systems 9/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Optimal control of Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Assume that the Metzler matrix A is non-Hurwitz.
Optimal robust control problem:determine ui ∈ R+, i ∈ [1,M ], with the following characteristics:
i) satisfy the constraint∑M
i=1 ui < 1
ii) make the system asymptotically stableiii) maximize system robustness against the external disturbance
Irene Zorzan Stability, stabilizability and control of Positive Systems 9/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Optimal control of Positive Bilinear Systems
Consider a Positive Bilinear System described by
x(t) =
(A+
M∑i=1
uiDi
)x(t) + w(t)
y(t) = Cx(t)
Assume that the Metzler matrix A is non-Hurwitz.
Optimal robust control problem:determine ui ∈ R+, i ∈ [1,M ], with the following characteristics:
i) satisfy the constraint∑M
i=1 ui < 1
ii) make the system asymptotically stableiii) minimize either the L1-norm or the H∞-norm of the system
Irene Zorzan Stability, stabilizability and control of Positive Systems 9/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems: application areas
Positive Bilinear Systems have been fruitfully employed in a variety ofapplication areas:
system biology
a Positive Bilinear System can be adopted to describe thebehaviour of a group of self-replicating genotypes⇒ determing the optimal control means determing the best drugsconcentration profilenetwork theoryoptimal control issues concern the proper selection of leaders in adirected graph
Irene Zorzan Stability, stabilizability and control of Positive Systems 10/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems: application areas
Positive Bilinear Systems have been fruitfully employed in a variety ofapplication areas:
system biologya Positive Bilinear System can be adopted to describe thebehaviour of a group of self-replicating genotypes⇒ determing the optimal control means determing the best drugsconcentration profile
network theoryoptimal control issues concern the proper selection of leaders in adirected graph
Irene Zorzan Stability, stabilizability and control of Positive Systems 10/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Positive Bilinear Systems: application areas
Positive Bilinear Systems have been fruitfully employed in a variety ofapplication areas:
system biologya Positive Bilinear System can be adopted to describe thebehaviour of a group of self-replicating genotypes⇒ determing the optimal control means determing the best drugsconcentration profilenetwork theoryoptimal control issues concern the proper selection of leaders in adirected graph
Irene Zorzan Stability, stabilizability and control of Positive Systems 10/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: definition
Compartmental Systems represent physical systems whose describ-ing variables are intrinsically nonnegative and obey some conserva-tion law (e.g., mass, energy, fluid).
Irene Zorzan Stability, stabilizability and control of Positive Systems 11/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: definition
Compartmental Systems represent physical systems whose describ-ing variables are intrinsically nonnegative and obey some conserva-tion law (e.g., mass, energy, fluid).
A Positive Systemx(t) = Ax(t) +Bu(t)
is a Compartmental System if the Metzler matrix A is such that the en-tries of each of its columns sum up to a nonpositive number
1>nA ≤ 0,
i.e., A is a compartmental matrix.
Irene Zorzan Stability, stabilizability and control of Positive Systems 11/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: motivations
Compartmental Systems arise in the description of a good number ofdynamical processes:
liquids flowing in a network of interconnected tankstime evolution of temperatures in adjacent roomskinetics of substances in tracer experimentscell proliferation through mitosisphysiological processes, e.g., insulin secretion, glucoseabsorption
Irene Zorzan Stability, stabilizability and control of Positive Systems 12/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: motivations
Compartmental Systems arise in the description of a good number ofdynamical processes:
liquids flowing in a network of interconnected tanks
time evolution of temperatures in adjacent roomskinetics of substances in tracer experimentscell proliferation through mitosisphysiological processes, e.g., insulin secretion, glucoseabsorption
Irene Zorzan Stability, stabilizability and control of Positive Systems 12/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: motivations
Compartmental Systems arise in the description of a good number ofdynamical processes:
liquids flowing in a network of interconnected tankstime evolution of temperatures in adjacent rooms
kinetics of substances in tracer experimentscell proliferation through mitosisphysiological processes, e.g., insulin secretion, glucoseabsorption
Irene Zorzan Stability, stabilizability and control of Positive Systems 12/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: motivations
Compartmental Systems arise in the description of a good number ofdynamical processes:
liquids flowing in a network of interconnected tankstime evolution of temperatures in adjacent roomskinetics of substances in tracer experiments
cell proliferation through mitosisphysiological processes, e.g., insulin secretion, glucoseabsorption
Irene Zorzan Stability, stabilizability and control of Positive Systems 12/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: motivations
Compartmental Systems arise in the description of a good number ofdynamical processes:
liquids flowing in a network of interconnected tankstime evolution of temperatures in adjacent roomskinetics of substances in tracer experimentscell proliferation through mitosis
physiological processes, e.g., insulin secretion, glucoseabsorption
Irene Zorzan Stability, stabilizability and control of Positive Systems 12/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Systems: motivations
Compartmental Systems arise in the description of a good number ofdynamical processes:
liquids flowing in a network of interconnected tankstime evolution of temperatures in adjacent roomskinetics of substances in tracer experimentscell proliferation through mitosisphysiological processes, e.g., insulin secretion, glucoseabsorption
Irene Zorzan Stability, stabilizability and control of Positive Systems 12/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems
Compartmental Switched Systems are adopted to describe the be-haviour, under different operating conditions, of systems modeling theexchange of material between different compartments.
Irene Zorzan Stability, stabilizability and control of Positive Systems 13/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems
Compartmental Switched Systems are adopted to describe the be-haviour, under different operating conditions, of systems modeling theexchange of material between different compartments.
A Compartmental Switched System is described by
x(t) = Aσ(t)x(t) +Bσ(t)u(t)
Irene Zorzan Stability, stabilizability and control of Positive Systems 13/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems
Compartmental Switched Systems are adopted to describe the be-haviour, under different operating conditions, of systems modeling theexchange of material between different compartments.
A Compartmental Switched System is described by
x(t) = Aσ(t)x(t) +Bσ(t)u(t)
and consists of:a family of compartmental models (the subsystems)(Ai, Bi), i ∈ [1,M ]
a switching function describing which of the subsystems is activeat every time instantσ : R+ → [1,M ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 13/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems
Compartmental Switched Systems are adopted to describe the be-haviour, under different operating conditions, of systems modeling theexchange of material between different compartments.
A Compartmental Switched System is described by
x(t) = Aσ(t)x(t) +Bσ(t)u(t)
and consists of:a family of compartmental models (the subsystems)(Ai, Bi), i ∈ [1,M ]
a switching function describing which of the subsystems is activeat every time instantσ : R+ → [1,M ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 13/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: motivations
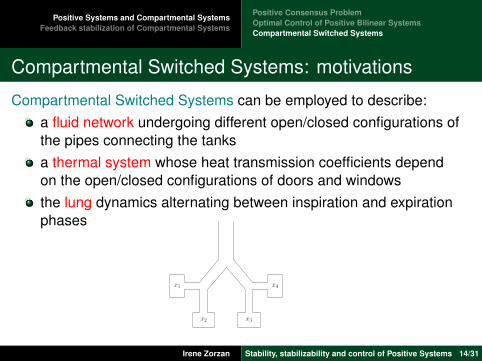
Compartmental Switched Systems can be employed to describe:
a fluid network undergoing different open/closed configurations ofthe pipes connecting the tanksa thermal system whose heat transmission coefficients dependon the open/closed configurations of doors and windowsthe lung dynamics alternating between inspiration and expirationphases
Irene Zorzan Stability, stabilizability and control of Positive Systems 14/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: motivations
Compartmental Switched Systems can be employed to describe:a fluid network undergoing different open/closed configurations ofthe pipes connecting the tanks
a thermal system whose heat transmission coefficients dependon the open/closed configurations of doors and windowsthe lung dynamics alternating between inspiration and expirationphases
Irene Zorzan Stability, stabilizability and control of Positive Systems 14/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: motivations
Compartmental Switched Systems can be employed to describe:a fluid network undergoing different open/closed configurations ofthe pipes connecting the tanksa thermal system whose heat transmission coefficients dependon the open/closed configurations of doors and windows
the lung dynamics alternating between inspiration and expirationphases
Room 1 Room 2
Room 3
u2
u1α
β δ
Irene Zorzan Stability, stabilizability and control of Positive Systems 14/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: motivations
Compartmental Switched Systems can be employed to describe:a fluid network undergoing different open/closed configurations ofthe pipes connecting the tanksa thermal system whose heat transmission coefficients dependon the open/closed configurations of doors and windowsthe lung dynamics alternating between inspiration and expirationphases
x1
x2 x3
x4
Irene Zorzan Stability, stabilizability and control of Positive Systems 14/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: stabilizability
Compartmental Switched System with autonomous subsystems
x(t) = Aσ(t)x(t), σ : R+ → [1,M ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 15/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: stabilizability
Compartmental Switched System with autonomous subsystems
x(t) = Aσ(t)x(t), σ : R+ → [1,M ]
Stabilizability:under what conditions on the matrices Ai, i ∈ [1,M ], for every pos-itive initial state x(0) > 0, there exists a switching function σ thatmakes x(t) asymptotically converge to zero?
Irene Zorzan Stability, stabilizability and control of Positive Systems 15/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: stabilizability
Compartmental Switched System with autonomous subsystems
x(t) = Aσ(t)x(t), σ : R+ → [1,M ]
Stabilizability:under what conditions on the matrices Ai, i ∈ [1,M ], for every pos-itive initial state x(0) > 0, there exists a switching function σ thatmakes x(t) asymptotically converge to zero?
IFF there exists a Hurwitz convex combination of Ai, i ∈ [1,M ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 15/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: stability
Compartmental Switched System with autonomous subsystems
x(t) = Aσ(t)x(t), σ : R+ → [1,M ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 16/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: stability
Compartmental Switched System with autonomous subsystems
x(t) = Aσ(t)x(t), σ : R+ → [1,M ]
Asymptotic stability under arbitrary switching:under what conditions on the matrices Ai, i ∈ [1,M ], the state tra-jectory x(t) asymptotically converges to zero for every positive ini-tial state x(0) > 0 and for every switching function σ?
Irene Zorzan Stability, stabilizability and control of Positive Systems 16/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
Compartmental Switched Systems: stability
Compartmental Switched System with autonomous subsystems
x(t) = Aσ(t)x(t), σ : R+ → [1,M ]
Asymptotic stability under arbitrary switching:under what conditions on the matrices Ai, i ∈ [1,M ], the state tra-jectory x(t) asymptotically converges to zero for every positive ini-tial state x(0) > 0 and for every switching function σ?
IFF all matrices Ai, i ∈ [1,M ], are Hurwitz
Irene Zorzan Stability, stabilizability and control of Positive Systems 16/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
The non-autonomous case
Autonomous case:x(t) = Aσ(t)x(t)
Non-autonomous case:x(t) = Aσ(t)x(t) +Bσ(t)u(t)
Asympt. stable under arbitrary switchingIFF Ai is Hurwitz for every i ∈ [1,M ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 17/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
The non-autonomous case
Autonomous case:x(t) = Aσ(t)x(t)
Non-autonomous case:x(t) = Aσ(t)x(t) +Bσ(t)u(t)
Asympt. stable under arbitrary switchingIFF Ai is Hurwitz for every i ∈ [1,M ]
Irene Zorzan Stability, stabilizability and control of Positive Systems 17/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
The non-autonomous case
Autonomous case:x(t) = Aσ(t)x(t)
Non-autonomous case:x(t) = Aσ(t)x(t) +Bσ(t)u(t)
Asympt. stable under arbitrary switchingIFF Ai is Hurwitz for every i ∈ [1,M ]
Feedback stabilization problem:under what conditions on the pairs (Ai, Bi), i ∈ [1,M ], thereexist feedback matrices Ki, i ∈ [1,M ], such that the control lawu(t) = Kix(t) makes the closed-loop system compartmental andasymptotically stable under arbitrary switching?
Irene Zorzan Stability, stabilizability and control of Positive Systems 17/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Positive Consensus ProblemOptimal Control of Positive Bilinear SystemsCompartmental Switched Systems
The non-autonomous case
Autonomous case:x(t) = Aσ(t)x(t)
Non-autonomous case:x(t) = Aσ(t)x(t) +Bσ(t)u(t)
Asympt. stable under arbitrary switchingIFF Ai is Hurwitz for every i ∈ [1,M ]
Feedback stabilization problem:under what conditions on the pairs (Ai, Bi), i ∈ [1,M ], thereexist feedback matrices Ki, i ∈ [1,M ], such that the control lawu(t) = Kix(t) makes the closed-loop system compartmental andasymptotically stable under arbitrary switching?
IFF ∃Ki, i ∈ [1,M ], s.t. Ai +BiKi is compartmental and Hurwitz
Irene Zorzan Stability, stabilizability and control of Positive Systems 17/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
State-feedback stabilization problem
Irene Zorzan Stability, stabilizability and control of Positive Systems 18/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
State-feedback stabilization problem
Consider a Compartmental System
x(t) = Ax(t) +Bu(t)
Irene Zorzan Stability, stabilizability and control of Positive Systems 18/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
State-feedback stabilization problem
Consider a Compartmental System
x(t) = Ax(t) +Bu(t)
and assume that the compartmental matrix A is non-Hurwitz.
Irene Zorzan Stability, stabilizability and control of Positive Systems 18/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
State-feedback stabilization problem
Consider a Compartmental System
x(t) = Ax(t) +Bu(t)
and assume that the compartmental matrix A is non-Hurwitz.
State-feedback stabilization problem:determine K ∈ Rm×n such that the state-feedback control lawu(t) = Kx(t) makes the closed-loop system
x(t) = (A+BK)x(t)compartmental and asymptotically stable.
Irene Zorzan Stability, stabilizability and control of Positive Systems 18/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Example: room temperature regulation
Room 1 Room 2
Room 3
Irene Zorzan Stability, stabilizability and control of Positive Systems 19/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Example: room temperature regulation
Room 1 Room 2
Room 3
u2
u1
Irene Zorzan Stability, stabilizability and control of Positive Systems 19/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Example: room temperature regulation
Room 1 Room 2
Room 3
u2
u1α
β γ
Irene Zorzan Stability, stabilizability and control of Positive Systems 19/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Example: room temperature regulation
Room 1 Room 2
Room 3
u2
u1α
β γ
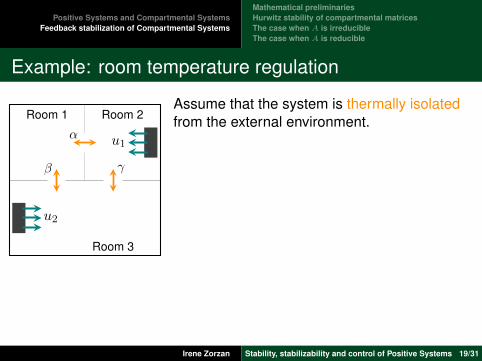
Assume that the system is thermally isolatedfrom the external environment.
Irene Zorzan Stability, stabilizability and control of Positive Systems 19/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Example: room temperature regulation
Room 1 Room 2
Room 3
u2
u1α
β γ
Assume that the system is thermally isolatedfrom the external environment.
xi = (ith room temp− desired temp) ≥ 0
Irene Zorzan Stability, stabilizability and control of Positive Systems 19/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Example: room temperature regulation
Room 1 Room 2
Room 3
u2
u1α
β γ
Assume that the system is thermally isolatedfrom the external environment.
xi = (ith room temp− desired temp) ≥ 0
Compartmental model describing tempera-tures evolution:x(t) =Ax(t) +Bu(t)
=
−(α+β) α βα −(α+γ) γβ γ −(γ+β)
x(t)+0 01 00 1
u(t)
Irene Zorzan Stability, stabilizability and control of Positive Systems 19/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Example: room temperature regulation
Room 1 Room 2
Room 3
u2
u1α
β γ
Assume that the system is thermally isolatedfrom the external environment.
xi = (ith room temp− desired temp) ≥ 0
Compartmental model describing tempera-tures evolution:x(t) =Ax(t) +Bu(t)
=
−(α+β) α βα −(α+γ) γβ γ −(γ+β)
x(t)+0 01 00 1
u(t)Room temperaturte regulation problem:determine a state-feedback control law that regulates all temperaturesby making use only of the temperature in Room 1.
Irene Zorzan Stability, stabilizability and control of Positive Systems 19/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Preliminary definitions
In the following we will denote by:
ei the ith canonical vector1n the n-dimensional vector with all entries equal to 1
Si ∈ R(n−1)×n the selection matrix obtained by removing the ithrow in the identity matrix In, i.e.,
Si =
[Ii−1 0 0
0 0 In−i
]
For any vector v ∈ Rn, Siv is the vector obtained from v byremoving the ith entry.For any matrix A ∈ Rn×m, SiA denotes the matrix obtained fromA by removing the ith row.
Irene Zorzan Stability, stabilizability and control of Positive Systems 20/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Preliminary definitions
In the following we will denote by:ei the ith canonical vector
1n the n-dimensional vector with all entries equal to 1
Si ∈ R(n−1)×n the selection matrix obtained by removing the ithrow in the identity matrix In, i.e.,
Si =
[Ii−1 0 0
0 0 In−i
]
For any vector v ∈ Rn, Siv is the vector obtained from v byremoving the ith entry.For any matrix A ∈ Rn×m, SiA denotes the matrix obtained fromA by removing the ith row.
Irene Zorzan Stability, stabilizability and control of Positive Systems 20/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Preliminary definitions
In the following we will denote by:ei the ith canonical vector1n the n-dimensional vector with all entries equal to 1
Si ∈ R(n−1)×n the selection matrix obtained by removing the ithrow in the identity matrix In, i.e.,
Si =
[Ii−1 0 0
0 0 In−i
]
For any vector v ∈ Rn, Siv is the vector obtained from v byremoving the ith entry.For any matrix A ∈ Rn×m, SiA denotes the matrix obtained fromA by removing the ith row.
Irene Zorzan Stability, stabilizability and control of Positive Systems 20/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Preliminary definitions
In the following we will denote by:ei the ith canonical vector1n the n-dimensional vector with all entries equal to 1
Si ∈ R(n−1)×n the selection matrix obtained by removing the ithrow in the identity matrix In, i.e.,
Si =
[Ii−1 0 0
0 0 In−i
]
For any vector v ∈ Rn, Siv is the vector obtained from v byremoving the ith entry.For any matrix A ∈ Rn×m, SiA denotes the matrix obtained fromA by removing the ith row.
Irene Zorzan Stability, stabilizability and control of Positive Systems 20/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Preliminary definitions
In the following we will denote by:ei the ith canonical vector1n the n-dimensional vector with all entries equal to 1
Si ∈ R(n−1)×n the selection matrix obtained by removing the ithrow in the identity matrix In, i.e.,
Si =
[Ii−1 0 0
0 0 In−i
]For any vector v ∈ Rn, Siv is the vector obtained from v byremoving the ith entry.
For any matrix A ∈ Rn×m, SiA denotes the matrix obtained fromA by removing the ith row.
Irene Zorzan Stability, stabilizability and control of Positive Systems 20/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Preliminary definitions
In the following we will denote by:ei the ith canonical vector1n the n-dimensional vector with all entries equal to 1
Si ∈ R(n−1)×n the selection matrix obtained by removing the ithrow in the identity matrix In, i.e.,
Si =
[Ii−1 0 0
0 0 In−i
]For any vector v ∈ Rn, Siv is the vector obtained from v byremoving the ith entry.For any matrix A ∈ Rn×m, SiA denotes the matrix obtained fromA by removing the ith row.
Irene Zorzan Stability, stabilizability and control of Positive Systems 20/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Preliminary definitions (cont’d)
A Metzler matrix A is reducible if there exists a permutation matrixΠ such that
Π>AΠ =
[A11 A12
0 A22
]where A11 and A22 are square nonvacuous matrices, otherwise itis irreducible.
Irene Zorzan Stability, stabilizability and control of Positive Systems 21/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Frobenius normal form
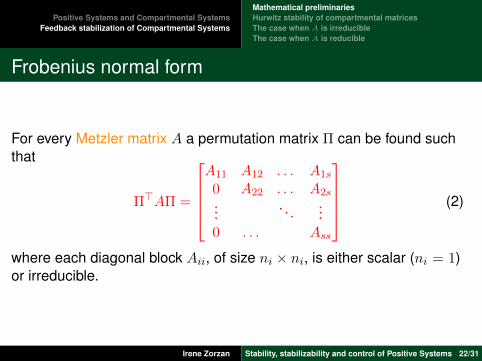
For every Metzler matrix A a permutation matrix Π can be found suchthat
Π>AΠ =
A11 A12 . . . A1s
0 A22 . . . A2s...
. . ....
0 . . . Ass
(2)
where each diagonal block Aii, of size ni × ni, is either scalar (ni = 1)or irreducible.
Irene Zorzan Stability, stabilizability and control of Positive Systems 22/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Frobenius normal form
For every Metzler matrix A a permutation matrix Π can be found suchthat
Π>AΠ =
A11 A12 . . . A1s
0 A22 . . . A2s...
. . ....
0 . . . Ass
(2)
where each diagonal block Aii, of size ni × ni, is either scalar (ni = 1)or irreducible. The block form (2) is usually known as Frobenius nor-mal form of A.
Irene Zorzan Stability, stabilizability and control of Positive Systems 22/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
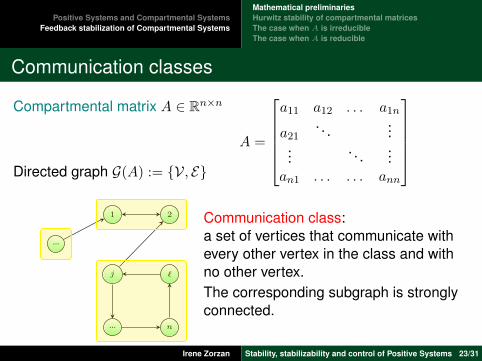
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
set of vertices
1 2
...
j `
... n
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
set of edges
1 2
...
j `
... n
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . . aj`
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
set of edges
1 2
...
j `
... n
aj` > 0
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
1 2
...
j `
... n
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
1 2
...
j `
... n
Vertex j and vertex ` can communicate
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
1 2
...
j `
... n
Vertex j and vertex ` can communicate
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
1 2
...
j `
... n
Communication class:a set of vertices that communicate withevery other vertex in the class and withno other vertex.The corresponding subgraph is stronglyconnected.
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
Directed graph G(A) := V, E
1 2
...
j `
... n
Frobenius normal form of A
A =
A11 A12 . . . A1s
0 A22 . . . A2s...
. . ....
0 . . . . . . Ass
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Communication classes
Compartmental matrix A ∈ Rn×n
Directed graph G(A) := V, E
1 2
...
j `
... n
Frobenius normal form of A
A =
A11 A12 . . . A1s
0 A22 . . . A2s...
. . ....
0 . . . . . . Ass
C1
C2
Cs
Irene Zorzan Stability, stabilizability and control of Positive Systems 23/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Hurwitz stability
Compartmental matrix A ∈ Rn×n
A =
a11 a12 . . . a1n
a21. . .
......
. . ....
an1 . . . . . . ann
Directed graph G(A) := V, E
1 2
...
j `
... n
Irene Zorzan Stability, stabilizability and control of Positive Systems 24/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Hurwitz stability
Compartmental matrix A ∈ Rn×n
A =
a11 a12 a1j a1n
a21. . .
......
. . ....
an1 . . . anj ann
Directed graph G(A) := V, E
1 2
...
j `
... n
1>nAej < 0
Vertex j has outflow to the environment
Irene Zorzan Stability, stabilizability and control of Positive Systems 24/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Hurwitz stability
Compartmental matrix A ∈ Rn×n
A =
a11 a12 a1j a1n
a21. . .
......
. . ....
an1 . . . anj ann
Directed graph G(A) := V, E
1 2
...
j `
... n
1>nAej < 0
Vertex j has outflow to the environment
Vertex ` is outflow connected
Irene Zorzan Stability, stabilizability and control of Positive Systems 24/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Hurwitz stability
Compartmental matrix A ∈ Rn×n
A =
a11 a12 a1j a1n
a21. . .
......
. . ....
an1 . . . anj ann
Directed graph G(A) := V, E
1 2
...
j `
... n
1>nAej < 0
Lemma 1:A compartmental matrix A is Hurwitz ifand only if all compartments are outflowconnected.
Irene Zorzan Stability, stabilizability and control of Positive Systems 24/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is irreducible
Proposition 1:
Consider a Compartmental System and assume that the state-spacematrix A is irreducible and non-Hurwitz.
Irene Zorzan Stability, stabilizability and control of Positive Systems 25/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is irreducible
Proposition 1:
Consider a Compartmental System and assume that the state-spacematrix A is irreducible and non-Hurwitz.The state-feedback stabilization problem is solvable if and only if thereexist h ∈ [1, n] and v ∈ Rm such that
Sh (Aeh +Bv) ≥ 0 (3)
1>nBv < 0 (4)
Irene Zorzan Stability, stabilizability and control of Positive Systems 25/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is irreducible
Proposition 1:
Consider a Compartmental System and assume that the state-spacematrix A is irreducible and non-Hurwitz.The state-feedback stabilization problem is solvable if and only if thereexist h ∈ [1, n] and v ∈ Rm such that
Sh (Aeh +Bv) ≥ 0 (3)
1>nBv < 0 (4)
When so, any matrix K = εve>h with ε ∈ (0, 1) is a possible solution.
Irene Zorzan Stability, stabilizability and control of Positive Systems 25/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is irreducible
Proposition 1:
Consider a Compartmental System and assume that the state-spacematrix A is irreducible and non-Hurwitz.The state-feedback stabilization problem is solvable if and only if thereexist h ∈ [1, n] and v ∈ Rm such that
Sh (Aeh +Bv) ≥ 0 (3)
1>nBv < 0 (4)
When so, any matrix K = εve>h with ε ∈ (0, 1) is a possible solution.
compartmental property
Irene Zorzan Stability, stabilizability and control of Positive Systems 25/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is irreducible
Proposition 1:
Consider a Compartmental System and assume that the state-spacematrix A is irreducible and non-Hurwitz.The state-feedback stabilization problem is solvable if and only if thereexist h ∈ [1, n] and v ∈ Rm such that
Sh (Aeh +Bv) ≥ 0 (3)
1>nBv < 0 (4)
When so, any matrix K = εve>h with ε ∈ (0, 1) is a possible solution.
compartmental property
outflow to environment
Irene Zorzan Stability, stabilizability and control of Positive Systems 25/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is irreducible
Proposition 1:
Consider a Compartmental System and assume that the state-spacematrix A is irreducible and non-Hurwitz.The state-feedback stabilization problem is solvable if and only if thereexist h ∈ [1, n] and v ∈ Rm such that
Sh (Aeh +Bv) ≥ 0 (3)
1>nBv < 0 (4)
When so, any matrix K = εve>h with ε ∈ (0, 1) is a possible solution.
compartmental property
graph (strong) connectedness
outflow to environment
Irene Zorzan Stability, stabilizability and control of Positive Systems 25/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is irreducible
Proposition 1:
Consider a Compartmental System and assume that the state-spacematrix A is irreducible and non-Hurwitz.The state-feedback stabilization problem is solvable if and only if thereexist h ∈ [1, n] and v ∈ Rm such that
Sh (Aeh +Bv) ≥ 0 (3)
1>nBv < 0 (4)
When so, any matrix K = εve>h with ε ∈ (0, 1) is a possible solution.
Every compartment is outflow connected!
Irene Zorzan Stability, stabilizability and control of Positive Systems 25/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
When A is irreducible and the state-feedback stabilizationproblem is solvable, there always exists a solution K with aunique nonzero column.
However, not all columns (i.e., not allindices h ∈ [1, n]) play an equivalent role.
In the Single-Input case (m = 1), problem solvability does notdepend on the specific values of the entries of A and B but onlyon their nonzero pattern.
The nonzero pattern of a matrix A ∈ Rn×m is the setZP(A) := (i, j) ∈ [1, n]× [1,m] : [Aij ] 6= 0.
Irene Zorzan Stability, stabilizability and control of Positive Systems 26/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
When A is irreducible and the state-feedback stabilizationproblem is solvable, there always exists a solution K with aunique nonzero column. However, not all columns (i.e., not allindices h ∈ [1, n]) play an equivalent role.
In the Single-Input case (m = 1), problem solvability does notdepend on the specific values of the entries of A and B but onlyon their nonzero pattern.
The nonzero pattern of a matrix A ∈ Rn×m is the setZP(A) := (i, j) ∈ [1, n]× [1,m] : [Aij ] 6= 0.
Irene Zorzan Stability, stabilizability and control of Positive Systems 26/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
When A is irreducible and the state-feedback stabilizationproblem is solvable, there always exists a solution K with aunique nonzero column. However, not all columns (i.e., not allindices h ∈ [1, n]) play an equivalent role.
In the Single-Input case (m = 1), problem solvability does notdepend on the specific values of the entries of A and B but onlyon their nonzero pattern.The nonzero pattern of a matrix A ∈ Rn×m is the setZP(A) := (i, j) ∈ [1, n]× [1,m] : [Aij ] 6= 0.
Irene Zorzan Stability, stabilizability and control of Positive Systems 26/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible
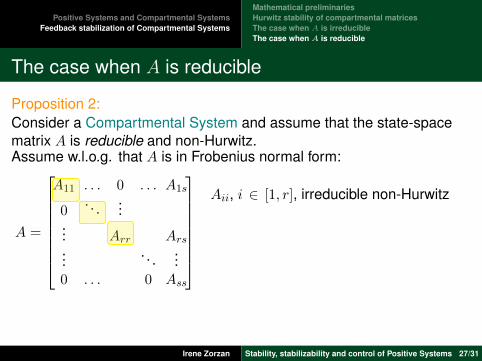
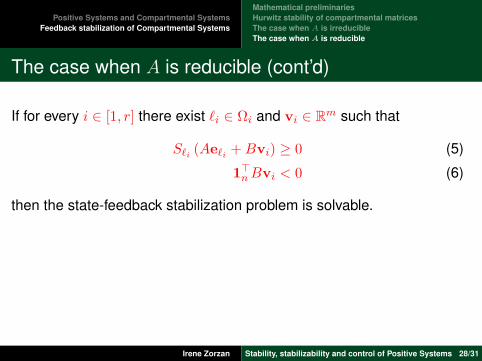
Proposition 2:Consider a Compartmental System and assume that the state-spacematrix A is reducible and non-Hurwitz.
Irene Zorzan Stability, stabilizability and control of Positive Systems 27/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible
Proposition 2:Consider a Compartmental System and assume that the state-spacematrix A is reducible and non-Hurwitz.Assume w.l.o.g. that A is in Frobenius normal form:
A =
A11 . . . 0 . . . A1s
0. . .
...... Arr Ars...
. . ....
0 . . . 0 Ass
Irene Zorzan Stability, stabilizability and control of Positive Systems 27/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible
Proposition 2:Consider a Compartmental System and assume that the state-spacematrix A is reducible and non-Hurwitz.Assume w.l.o.g. that A is in Frobenius normal form:
A =
A11 . . . 0 . . . A1s
0. . .
...... Arr Ars...
. . ....
0 . . . 0 Ass
Aii, i ∈ [1, r], irreducible non-Hurwitz
Irene Zorzan Stability, stabilizability and control of Positive Systems 27/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible
Proposition 2:Consider a Compartmental System and assume that the state-spacematrix A is reducible and non-Hurwitz.Assume w.l.o.g. that A is in Frobenius normal form:
A =
A11 . . . 0 . . . A1s
0. . .
...... Arr Ars...
. . ....
0 . . . 0 Ass
Aii, i ∈ [1, r], irreducible non-Hurwitz
Aii, i ∈ [r + 1, s], irreducible Hurwitz
Irene Zorzan Stability, stabilizability and control of Positive Systems 27/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible
Proposition 2:Consider a Compartmental System and assume that the state-spacematrix A is reducible and non-Hurwitz.Assume w.l.o.g. that A is in Frobenius normal form:
A =
A11 . . . 0 . . . A1s
0. . .
...... Arr Ars...
. . ....
0 . . . 0 Ass
Aii, i ∈ [1, r], irreducible non-Hurwitz
Aii, i ∈ [r + 1, s], irreducible Hurwitz
Let Ωi, i ∈ [1, s], be the set of all column indices corresponding to Aii.
Irene Zorzan Stability, stabilizability and control of Positive Systems 27/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible (cont’d)
If for every i ∈ [1, r] there exist `i ∈ Ωi and vi ∈ Rm such that
S`i (Ae`i +Bvi) ≥ 0 (5)
1>nBvi < 0 (6)
then the state-feedback stabilization problem is solvable.
Irene Zorzan Stability, stabilizability and control of Positive Systems 28/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible (cont’d)
If for every i ∈ [1, r] there exist `i ∈ Ωi and vi ∈ Rm such that
S`i (Ae`i +Bvi) ≥ 0 (5)
1>nBvi < 0 (6)
then the state-feedback stabilization problem is solvable.Moreover, any matrix
K := ε∑r
i=1 vie>`i, ε ∈ (0, 1)
is a possible solution.
Irene Zorzan Stability, stabilizability and control of Positive Systems 28/31
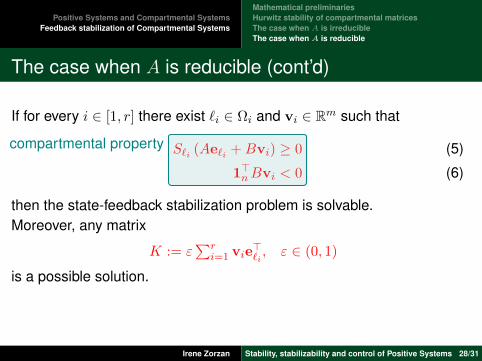
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible (cont’d)
If for every i ∈ [1, r] there exist `i ∈ Ωi and vi ∈ Rm such that
S`i (Ae`i +Bvi) ≥ 0 (5)
1>nBvi < 0 (6)
then the state-feedback stabilization problem is solvable.Moreover, any matrix
K := ε∑r
i=1 vie>`i, ε ∈ (0, 1)
is a possible solution.
compartmental property
Irene Zorzan Stability, stabilizability and control of Positive Systems 28/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible (cont’d)
If for every i ∈ [1, r] there exist `i ∈ Ωi and vi ∈ Rm such that
S`i (Ae`i +Bvi) ≥ 0 (5)
1>nBvi < 0 (6)
then the state-feedback stabilization problem is solvable.Moreover, any matrix
K := ε∑r
i=1 vie>`i, ε ∈ (0, 1)
is a possible solution.
compartmental property
outflow to environment
Irene Zorzan Stability, stabilizability and control of Positive Systems 28/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible (cont’d)
If for every i ∈ [1, r] there exist `i ∈ Ωi and vi ∈ Rm such that
S`i (Ae`i +Bvi) ≥ 0 (5)
1>nBvi < 0 (6)
then the state-feedback stabilization problem is solvable.Moreover, any matrix
K := ε∑r
i=1 vie>`i, ε ∈ (0, 1)
is a possible solution.
compartmental property
subgraph (strong) connectedness
outflow to environment
Irene Zorzan Stability, stabilizability and control of Positive Systems 28/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
The case when A is reducible (cont’d)
If for every i ∈ [1, r] there exist `i ∈ Ωi and vi ∈ Rm such that
S`i (Ae`i +Bvi) ≥ 0 (5)
1>nBvi < 0 (6)
then the state-feedback stabilization problem is solvable.Moreover, any matrix
K := ε∑r
i=1 vie>`i, ε ∈ (0, 1)
is a possible solution.
Every compartment is outflow connected!
Irene Zorzan Stability, stabilizability and control of Positive Systems 28/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
Let r be the number of non-Hurwitz communication classes.
The previous proposition provides only a sufficient (but notnecessary) condition for the problem solvability.
If the feedbackstabilization problem is solvable, the minimum number of nonzerocolumns of any solution K is at least r but it might be greater.
Algorithm that allows to assess problem solvability andprovides a solution whenever it exists.
In the Single-Input case (m = 1) a necessary condition for theproblem solvability is that r = 1.
Irene Zorzan Stability, stabilizability and control of Positive Systems 29/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
Let r be the number of non-Hurwitz communication classes.
The previous proposition provides only a sufficient (but notnecessary) condition for the problem solvability.
If the feedbackstabilization problem is solvable, the minimum number of nonzerocolumns of any solution K is at least r but it might be greater.
Algorithm that allows to assess problem solvability andprovides a solution whenever it exists.
In the Single-Input case (m = 1) a necessary condition for theproblem solvability is that r = 1.
Irene Zorzan Stability, stabilizability and control of Positive Systems 29/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
Let r be the number of non-Hurwitz communication classes.
The previous proposition provides only a sufficient (but notnecessary) condition for the problem solvability. If the feedbackstabilization problem is solvable, the minimum number of nonzerocolumns of any solution K is at least r but it might be greater.
Algorithm that allows to assess problem solvability andprovides a solution whenever it exists.
In the Single-Input case (m = 1) a necessary condition for theproblem solvability is that r = 1.
Irene Zorzan Stability, stabilizability and control of Positive Systems 29/31
Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
Let r be the number of non-Hurwitz communication classes.
The previous proposition provides only a sufficient (but notnecessary) condition for the problem solvability. If the feedbackstabilization problem is solvable, the minimum number of nonzerocolumns of any solution K is at least r but it might be greater.
Algorithm that allows to assess problem solvability andprovides a solution whenever it exists.
In the Single-Input case (m = 1) a necessary condition for theproblem solvability is that r = 1.
Irene Zorzan Stability, stabilizability and control of Positive Systems 29/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Mathematical preliminariesHurwitz stability of compartmental matricesThe case when A is irreducibleThe case when A is reducible
Remarks
Let r be the number of non-Hurwitz communication classes.
The previous proposition provides only a sufficient (but notnecessary) condition for the problem solvability. If the feedbackstabilization problem is solvable, the minimum number of nonzerocolumns of any solution K is at least r but it might be greater.
Algorithm that allows to assess problem solvability andprovides a solution whenever it exists.
In the Single-Input case (m = 1) a necessary condition for theproblem solvability is that r = 1.
Irene Zorzan Stability, stabilizability and control of Positive Systems 29/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Conclusions
Positive Systems provide an effective mathematical description ofa variety of real phenomena/processes.
Positivity constraint makes it possible to tackle many controlissues by resorting to ad hoc tools and techniques that in thegeneral case cannot be employed.
Think positive, be positive!
Irene Zorzan Stability, stabilizability and control of Positive Systems 30/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Conclusions
Positive Systems provide an effective mathematical description ofa variety of real phenomena/processes.
Positivity constraint makes it possible to tackle many controlissues by resorting to ad hoc tools and techniques that in thegeneral case cannot be employed.
Think positive, be positive!
Irene Zorzan Stability, stabilizability and control of Positive Systems 30/31

Positive Systems and Compartmental SystemsFeedback stabilization of Compartmental Systems
Thank you!
Prof. Maria Elena Valcher
Prof. Anders Rantzer
Irene Zorzan Stability, stabilizability and control of Positive Systems 31/31



![1880.] On the Stability, or Instability, of certain Fluid ...gibbs.if.usp.br/~marchett/fluidos/instability_rayleigh-1.pdf · On the Stability, or Instability, of certain Fluid Motions.](https://static.fdocuments.net/doc/165x107/5b43259c7f8b9a26268bbb3f/1880-on-the-stability-or-instability-of-certain-fluid-gibbsifuspbrmarchettfluidosinstabilityrayleigh-1pdf.jpg)
![1 Stabilizability and Norm-Optimal Control Design …1209.1123v1 [cs.SY] 5 Sep 2012 1 Stabilizability and Norm-Optimal Control Design subject to Sparsity Constraints S¸erban Sabau](https://static.fdocuments.net/doc/165x107/5afd31637f8b9a68498c8475/1-stabilizability-and-norm-optimal-control-design-12091123v1-cssy-5-sep.jpg)











