Stability of fishing vessels in waves and wind - ULisboa · Stability of fishing vessels in waves...
12
Stability of fishing vessels in waves and wind J. L. Mantari Centre for Marine Technology and Engineering (CENTEC), Technical University of Lisbon, Instituto Superior Técnico, Lisboa, PORTUGAL ABSTRACT: The The stability characteristics of 27 fishing vessels, mainly from the Portuguese and Peruvian fishing fleet, are studied. Calculations of ship’s stability for longitudinal and beam waves were made. The variations of dynamic transverse intact stability of the fishing vessels under 3 operational loading conditions are calculated and analyzed for 2 representative sinusoidal longitudinal waves. The wave parameters considered were the following: s=1/20 and (a) /Lpp=1, (b) /Lpp=1.6, with wave crest position along the wave or vessel’s length. Potential for the occurrence of stability failure due to pure loss of stability and parametric resonance were found. For beam waves, fishing gear and gusty wind loads were included to evaluate the energy balance between the heeling and righting moments. Based on these calculations, size, hull form and others particularities of the fishing vessels, some light on the occurrence of partial or total stability failure were found. An overview of the International Code on Intact Stability (2008 IS Code) related to fishing vessels, is made. Finally, conclusions are drawn about 2008 IS Code, and the loss of fishing vessel’s intact stability in longitudinal and beam waves. Keywords Stability failure, fishing vessel, stability variations in longitudinal waves, GZ curves, design criteria, fishing gear forces 1 INTRODUCTION The safety management systems applied at the international level in merchant ships do not have their equivalent in the vessels dedicated to fishing, and much less to the most numerous sub-sector, the so called-artisan fishing (Piniella et al. 2009, Kuo 2003). The safety of fishing vessels remains a key concern given the high rates of accidents occurring worldwide. The IMO, FAO and some Classification Societies have some records or data of the world fishing vessels, but no representative and trusted database about casualties of fishing vessels is available. It is important to distinguish between casualties (Antão and Soares 2004) and work accidents onboard (Antão et al. 2008). The casualties can occur because of the stability failure of the vessel, for many reasons well described by (Umeda et al. 1999, Umeda 2002, Francescutto 2007), mostly including additional factors suggested by Kobylinski (2003) and others authors. On the other hand, the accidents onboard occur mainly because the work environment is affected by: the dynamic stability of the vessels (Piniella et al. 2008), weather condition, vessel location, time of the year, vessel characteristics (Di Jin et al. 2005). Most of the accidents aboard happen on deck or in holds (Havold 2009) during the trips to and from the fishing grounds and many authors believe that the main reason of accidents on the fishing industry is human error, which account for between 75% and 96% of all accidents in the industry (Rothblum et al. 2000, Umberti et al 2001), which is maybe higher but not too different from what is found in commercial vessels (Guedes Soares et al. 2001, Antão and Guedes Soares 2008). These ideas are supported by Kobylinski (2003), in the sense that not only the “environment” basic element should be considered in the ship stability analysis in general, it should consider the four basis elements: ship, environment, cargo and operations. The present studies represent an initial effort in that project by studying a set of 27 fishing vessels mainly from the Portuguese and Peruvian fleets,
Transcript of Stability of fishing vessels in waves and wind - ULisboa · Stability of fishing vessels in waves...

Stability of fishing vessels in waves and wind
J. L. Mantari Centre for Marine Technology and Engineering (CENTEC), Technical University of Lisbon,
Instituto Superior Técnico, Lisboa, PORTUGAL
ABSTRACT: The The stability characteristics of 27 fishing vessels, mainly from the Portuguese and
Peruvian fishing fleet, are studied. Calculations of ship’s stability for longitudinal and beam waves were
made. The variations of dynamic transverse intact stability of the fishing vessels under 3 operational loading
conditions are calculated and analyzed for 2 representative sinusoidal longitudinal waves. The wave
parameters considered were the following: s=1/20 and (a) /Lpp=1, (b) /Lpp=1.6, with wave crest position
along the wave or vessel’s length. Potential for the occurrence of stability failure due to pure loss of stability
and parametric resonance were found. For beam waves, fishing gear and gusty wind loads were included to
evaluate the energy balance between the heeling and righting moments. Based on these calculations, size,
hull form and others particularities of the fishing vessels, some light on the occurrence of partial or total
stability failure were found. An overview of the International Code on Intact Stability (2008 IS Code) related
to fishing vessels, is made. Finally, conclusions are drawn about 2008 IS Code, and the loss of fishing
vessel’s intact stability in longitudinal and beam waves.
Keywords Stability failure, fishing vessel, stability variations in longitudinal waves, GZ curves, design
criteria, fishing gear forces
1 INTRODUCTION
The safety management systems applied at the
international level in merchant ships do not have
their equivalent in the vessels dedicated to fishing,
and much less to the most numerous sub-sector, the
so called-artisan fishing (Piniella et al. 2009, Kuo
2003).
The safety of fishing vessels remains a key
concern given the high rates of accidents occurring
worldwide. The IMO, FAO and some Classification
Societies have some records or data of the world
fishing vessels, but no representative and trusted
database about casualties of fishing vessels is
available.
It is important to distinguish between casualties
(Antão and Soares 2004) and work accidents
onboard (Antão et al. 2008). The casualties can
occur because of the stability failure of the vessel,
for many reasons well described by (Umeda et al.
1999, Umeda 2002, Francescutto 2007), mostly
including additional factors suggested by Kobylinski
(2003) and others authors. On the other hand, the
accidents onboard occur mainly because the work
environment is affected by: the dynamic stability of
the vessels (Piniella et al. 2008), weather condition,
vessel location, time of the year, vessel
characteristics (Di Jin et al. 2005).
Most of the accidents aboard happen on deck or
in holds (Havold 2009) during the trips to and from
the fishing grounds and many authors believe that
the main reason of accidents on the fishing industry
is human error, which account for between 75% and
96% of all accidents in the industry (Rothblum et al.
2000, Umberti et al 2001), which is maybe higher
but not too different from what is found in
commercial vessels (Guedes Soares et al. 2001,
Antão and Guedes Soares 2008). These ideas are
supported by Kobylinski (2003), in the sense that not
only the “environment” basic element should be
considered in the ship stability analysis in general, it
should consider the four basis elements: ship,
environment, cargo and operations.
The present studies represent an initial effort in
that project by studying a set of 27 fishing vessels
mainly from the Portuguese and Peruvian fleets,
with different configurations and modes of operation
in order to have a better understanding of:
The range of variation that can be expected
in the intact stability characteristics in
longitudinal waves and in this way to guide
the design of the decision support system to
cope with pure loss of stability on a crest
wave and with the likelihood of parametric
roll.
The action of fishing gear forces, wind and
combinations of some fishing vessels in a
fishing trip scenario, and their influence in
the stability failure.
The Subcommittee on Stability and Load Lines
and on Fishing Vessels is also analyzing some of
these problems and their results have been taken into
account in this paper.
This study shows that in occasions the IMO
rough weather criteria may be unconservative.
2 INTACT STABILITY OF FISHING VESSELS
The sea waves are irregular, and despite the regular
wave approximation being unconservative (Umeda
et al. 1999), for reasons of simplicity this paper uses
the well known crest, trough and own sinusoidal
wave to study their effect in the stability of fishing
vessels. In order to reach large variation in the
righting arms, it is common practice to use the wave
length to ship length ratio around 1 and wave
steepness equal to 1/10, as pointed by several
authors and also recommended by the (IMO-
MSC.1/Circ.1200 2006).
The current IMO weather criterion, utilizes the
energy balance method adopted in Japan without
major modifications. This paper assumes that a
fishing vessel with a steady heel angle due to steady
wind has a resonant roll motion in beam waves.
Then, as a worst case, the fishing vessel is assumed
to suffer gusty wind and fishing gear loads (if they
exist) when she rolls toward windward. In the case
of the resonant roll, roll damping moment and wave
exciting moment cancel out. Thus, the energy
balance between restoring and wind heeling energy
can be validated around the equilibrium point.
Furthermore, at the final stage of capsizing the effect
of wave exciting moment can be considered to be
small, since no resonance mechanism exists near the
angle of vanishing stability.
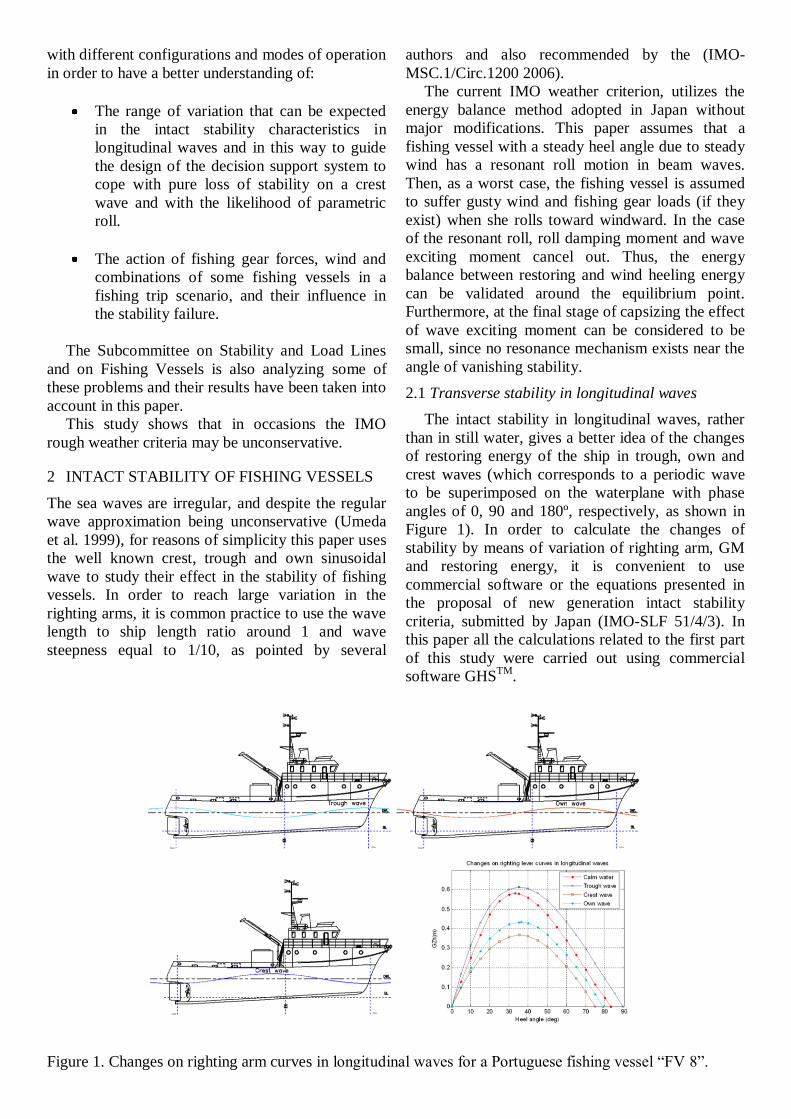
2.1 Transverse stability in longitudinal waves
The intact stability in longitudinal waves, rather
than in still water, gives a better idea of the changes
of restoring energy of the ship in trough, own and
crest waves (which corresponds to a periodic wave
to be superimposed on the waterplane with phase
angles of 0, 90 and 180º, respectively, as shown in
Figure 1). In order to calculate the changes of
stability by means of variation of righting arm, GM
and restoring energy, it is convenient to use
commercial software or the equations presented in
the proposal of new generation intact stability
criteria, submitted by Japan (IMO-SLF 51/4/3). In
this paper all the calculations related to the first part
of this study were carried out using commercial
software GHSTM
.
Figure 1. Changes on righting arm curves in longitudinal waves for a Portuguese fishing vessel “FV 8”.

The longitudinal and quartering seas are some of
the most critical conditions that should be analyzed
and are applicable to all kind of ships. There are
interesting studies about fishing vessels considering
longitudinal and quartering seas. The changes of
stability in longitudinal waves that induces
parametric resonance were studied experimentally
and numerically by Hamamoto and Panjaitan (1996),
Umeda et al. (1999), Neves et al. (1999), Pérez-
Rojas et al. (2003), Ribeiro e Silva et al. (2004) and
several authors. Umeda et al. (1999) studied
experimentally two fishing vessels and came to the
conclusion that quartering seas are more dangerous
than head seas and can lead to more capsizing.
As example of the changes of stability due to the
hull forms, the experimental studies done by Neves
et al. (1999) concluded that a stern deep transom is
more sensitive than a round stern trawler. This is
corroborated in a simple way in this paper, as
mentioned hereafter, and it was used as comparison
parameter to evaluate if the hard chinned hull with a
characteristic classical purse seiner transom is
sensitive or not to the parametric roll resonance
phenomena.
In this simple way of analysis it is not possible to
reach conclusions about parametric rolling
phenomena. However, what this paper is trying to
point out is that stability software can be used for a
preliminary analysis of such changes of stability
based on the righting arm curve obtained for the
most severe wave conditions. This will give some
indications about the susceptibility to parametric
rolling, despite not providing a complete answer
which only specific software like the one of Ribeiro
e Silva et al. (2005) can provide.
2.2 Transverse stability in beam wind and rolling
(weather criterion)
The basic principle of the IMO rough weather
criteria is the balance between restoring and
inclining energy in beam waves and wind, assuming
certain roll amplitude that takes into account the
excitation moment due to waves. The criteria are
used to determine fishing vessel performance in
beam seas and strong winds. These criteria assume
that a fishing vessel has taken a large roll to
windward from a passing beam wave. After the
wave crest passes the vessel quickly rolls to the
upright position due to both the wind pressure on the
lateral plane and the backside of the passing wave.
In Figure 2, the Area “A” represents the amount of
energy associated with the inclining moment that
acts to snap roll the fishing vessel back upright, after
the beam wave passes. Area “B” is the restoring
energy available to counter the fishing vessel
rollback. 1 is the angle of roll to windward due to
wave action, and 2 is the downflooding angle or the
angle of second intersect between steady wind lever
l1 and righting arms curve c or 50 deg, whichever is
less.
2.3 Transverse stability due to fishing gear loads.
Pelagic trawling and purse seining requires
considerable skill to precisely control a fishing
vessel and her gear. It is important to note that it is
very rare, except in special cases, that the heel
caused by wind only would endanger a fishing
vessel (Gefaell, 2005). Usually what happens is that
stability is lost when there is an unusual combination
of wind, waves and fishing loads. An interesting
research even highlighted that there are more fishing
vessels accidents during the fishing and recovery of
gear operation (Wang et al. 2005) than in heavy
weather. These two arguments and those criteria
developed by IMO Subcommittee on safety of
fishing vessels (IMO 1979) motivated this work.
The following analysis are based on a procedure
reported by the IMO after a proposal submitted by
the Soviet Union in 1979 (IMO 1979), but here they
are applied to a traditional pelagic pure seiner, see
Figure 3.
The current purse seiners, for example, have
fishing gears that put in danger a fishing vessel quite
easily, mainly for these which still use the power
block in a high position. As reported before (IMO
1979) the increase of power of the machinery, in
general, increases the heeling moment until a point
that weather criterion is not the only way to guaranty
the stability of the fishing vessel in operation.
However, nowadays in some countries, for example
Peru, there is still a tendency to increase the power
of the machinery like the main engine, winch and
power block.
-10 0 10 20 30 40 50 60 70 80 90-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Balance of energy of the intact stability at fishing operation
Heel Angle (deg)
Arm
(m
)
Righting arm in still water condition
Heeling arm due to wind and fishing gear loads
O
A
B
Figure 2. Balance of energy for the weather criteria.

WLf
WLo
WLf
WLo
Figure 3. Gear loads on a traditional pelagic purse seiner.
A classical purse seiner has two devices for
fishing. The winch has the function of collecting the
bottom of the net, rings and weights; the winch
produces a load that is represented as P2 in Figure 3.
The power block has the function of fish leaning
toward the side of the vessels, collect the buoys and
the rest of the upper net; the power block produces a
load that is represented as P1 in Figure 3.
The simplified scenario for the calculation of the
heeling moment due to fishing loads is shown in
Figure 3. This uses a coordinate system xyz fixed in
space, and a coordinate system attached to the vessel
x’y’z’.
As illustrated in Figure 3, after an angular
displacement the following orthogonal coordinate
transformation matrix [T] is applied to describe the
position of points A’, B’ and Q’ fixed to a FV:
AZ
AY
T
AZ
AY
'
' ,B
ZB
YT
BZ
BY
'
' ,Q
Z
QY
T
QZ
QY
'
'
where: cossin
sincosT (1)
The moment due to fishing net load P1 at the power
block is given by:
cos)''
(1
sin)''
(11 Q
YA
YPQ
ZA
ZPM (2)
)]cos()sin()[(11 A
YA
QA
ZPM (3)
)1
cos(111
DPM (4)
The moment due to the pull of winch P2 is given by:
)''
(sin2
)''
(22 Q
YB
YPQ
ZB
ZCosPM (5)
)2
cos(222
DPM (6)
where:
1 = P1 angle as shown in Fig. 3;
2 = P2 angle as shown in Fig. 3; D1 = distance from point Q to point A (Power Block);
D2 = distance from point Q to point B (Purse Gallows).
The total heeling moment due to both fishing gear
loads is therefore given by:
)2
cos(22
)1
cos(11
DPDPt
M (7)
The maximum heeling moment, with “ =0” and
“ ” variable, can also be found using a basic
trigonometric theory:
2211maxDPDP
tM cos( 2) (8)
Despite the simplifications used in this static
analysis, both methods are still conservative because
it considers the maximum pull of the fishing gear as
static and therefore dynamic effects due to waves
and current acting on the ship and fishing gear are
ignored.
3 CALCULATION RESULTS
3.1 Fishing vessels studied
In this section a set of 2 sinusoidal longitudinal
waves, which include a subset of 34 waves profiles
for each fishing vessel and each operational loading
condition, with crest wave position along Lpp or ,
were studied. Additionally, a number more
significant of fishing vessels were considered, and
the following calculations were done:
a) Change of draft and displacement at still water,
and at different loading conditions;
b) Calculation of the intact stability of fishing
vessels in waves for vessels larger than 24m, these
calculations were done using the International Code
on Intact Stability (2008 IS Code) (IMO-
MSC.267(85) 2008);

c) Calculation of the intact stability of fishing
vessels in waves for vessels smaller than 24m, these
calculations were done using FAO/ILO/IMO2005
intact stability criteria (FAO/ILO/IMO 2005);
d) Considering the items b and c, variations of
GM, variations of righting lever at 30º, and
variations of restoring energy from 0º to 30º and 0º
to 40º are presented. These calculations were
performed for all the fishing vessels studied in this
Thesis and considering different loading conditions,
when full data were available.
From the 27 vessel studied, see Table 1, 16
fishing vessels present full data, see more details in
the full thesis, and they were studied at different
loading conditions: (C1) 0% cargo, 100%
consumables; (C2) 100% cargo, 35 – 50%
consumables; (C3) 100% cargo, 10 – 20%
consumables.
Some of the fishing vessels studied in this paper
are shown in Figures 4 , see Table 1. They were
classified by hull forms and hull size for their
analysis, as shown in Tables 1. The majority of the
fishing vessels, as mentioned above, were analyzed
at three different operational loading conditions.
However, some of the vessels were studied as they
were analyzed by the corresponding authors in their
respective papers. For example, FV2-FV5, FV9
presented in Table 1 were taken from Pérez-Rojas et
al. (2003, 2006) and they were also studied by
Santos et al. (2008). FV 7 which came from Amagai
et al. (2000). The fishing vessel FV 27 is a modern
Chilean tuna purse seiner. The fishing vessels FV 12
and FV 13 were extensively published by Neves et
al. (1999). The Portuguese fishing vessels are
studied in here for the first time (FV1, FV6, FV8,
FV10, FV11, FV14 and FV15). The rest of fishing
vessels are Peruvian pelagic purse seiners (FV18-
FV26).
3.2 Variation of transverse stability in longitudinal
waves
Figures 5-6 show the roll-restoring energy
variation, from 0 to 30º (left side), at different
operational loading conditions for the 27 fishing
vessels considered in this Thesis. Notice that some
of these fishing vessels present only one operational
loading condition, because they were presented as
they were studied previously. Figure 5 shows the
roll-restoring energy variation of the fishing vessels
“FV3” and “FV5” at operational loading condition
C3, which, in addition to the fishing vessel “FV4”,
(Figure 6) capsized due to stability problems (Pérez-
Rojas et al. 2006). Figure 6 also shows that they
have larger roll-restoring variations compared with
other small fishing vessels of similar size and hull
form. These large variations, in addition to some
other particularities of stability changes, have
influence on the total or partial failure of a vessel.
The causes of partial or total stability failure
according to the IMO criteria are several. This work
aims to provide some preliminary guidance to ship
designers on the possibility of occurrence of
parametric resonance and pure loss of stability in
longitudinal waves.
Table 1. Fishing vessels main characteristics, hull size

Figure 4. Body view of 15 fishing vessels. “FV1”, “FV6”, “FV8”, “FV10”, “FV11”, “FV14” and “FV15” are from the Portuguese fleet and the rest are from Spain and Japan.
Roll restoring energy variation (%), from 0 to 30 deg., with
respect to still water (H/ =0.05, /Lpp=1 )
-75
-50
-25
0
25
50
75
100
125
FV
1
FV
3
FV
5
FV
6
FV
8
FV
10
FV
14
FV
15
FV
16
FV
18
FV
19
FV
20
FV
21
FV
22
FV
23
FV
24
FV
25
FV
26
Ch
ang
es o
f re
sto
rin
g e
ner
gy
(%
)
.
Positive variation
Negative variation
Maximum variation
Figure 5. Changes of righting arm with respect to calm water
(normalized by 100/B), B/T and Lpp/B.
Roll restoring energy variation (%), from 0 to 30 deg., with
respect to still water (H/ =0.05, /Lpp=1 )
-50
-25
0
25
50
75
100
125
150
175
FV
1
FV
2
FV
4
FV
6
FV
7
FV
8
FV
9
FV
10
FV
12
FV
13
FV
14
FV
15
FV
16
FV
17
FV
18
FV
19
FV
20
FV
21
FV
22
FV
23
FV
24
FV
25
FV
26
FV
27
Ch
an
ges
of
rest
ori
ng
en
erg
y (
%)
.
Positive variation
Negative variation
Maximum variation
Figure 6. Changes of restoring energy (%) from 0 to 30
degrees, respect to still water.

Table 2. Change of roll-restoring energy variation in waves (respect to still water) at critical operational loading condition. Wave
parameters: Upper (H/ =0.05, /Lpp=1.6), lower (H/ =0.05, /Lpp=1).
The most rapid increase of roll in a parametric
resonance scenario could be observed when the
vessel experiences an internal roll disturbance
combined with a condition of increasing energy in a
particular sailing condition. This combination of
restoring with a larger-than-calm-water and resisting
the roll with less-than-calm-water can cause the roll
angle to progressively increase to a large and
possibly dangerous level. However, all the fishing
vessels have this combination of roll-restoring
energy. But some of them has the gain of roll-
restoring energy larger than the loss of roll-restoring
energy, i.e. At is larger than |Ac|, see Figure 7, in
such cases the restoring moment tends to accelerate
the vessel back to equilibrium with a excitation
which is even larger than other situation (At < |Ac|),
and potential for resonance phenomena can be shed,
see Table 2.
Figure 7. Fishing vessel model (FV10)
Figure 7 show the model of the FV10 (left side)
and the percentage of gain and loss of roll-restoring
energy up to 30º (right side).
In Table 2, it can be seem that some specific
fishing vessels have particular restoring energy
variations which, combined with low GMsw and
large GM variations in waves could lead to the

occurrence of partial or total stability failure. The
ratios between the absolute value of the percentage
gain and loss of roll-restoring energy up to 30º and
40º, which are less than 1, give us potential for the
occurrence of parametric resonance; see fishing
vessels FV10, FV14, FV15, FV25 and FV26.
Attention is called to these particular fishing vessels
marked in bold in Table 2.
Similar analyses were performed to the vessels
mentioned above (FV12, FV13, FV17), and not only
for the ones which are included in Table 2. As
expected, they showed potential for the occurrence
of parametric resonance, as confirmed by other
authors which have studied these same fishing
vessels Neves et al. (1999, 2002), Ribeiro e Silva et
al. (2004) and De Juana Gamo et al. (2005).
In another hand, it is possible to notice than even
when differences of length are not significant (see
Table 1) it is not possible to reach a general
conclusion about susceptibility to resonance
phenomena, but what is remarkable is that
considering also the hull from (see Table 1) it
becomes possible to reach some conclusions about
the changes of the stability in fishing vessels.
For example, the ITPS (Inclined Transom Purse
Seiner) (see Table 1 and Figures 4 and 8), have
direct relation with the loss of restoring energy in
trough waves for the fishing vessels less than 40m in
length, as shown in Figures 5 and 6, and despite this
kind of waves are the most favourable.
However, according to Ribeiro e Silva et al.
(2005), parametric rolling can occur only when large
transverse stability changes (driven by wave
characteristics, coupled heave and pitch responses,
and hull form parameters such as hull flare, end
sections shape, and main deck position) are
combined with low damping (reduced speed).
Hence, hard chinned hulls may also have larger roll
damping forces due to viscous effects at the hard
chinned, and turn to be less sensitive to parametric
rolling than soft type hull forms.
Figure 9 shows the Ince-Strutt diagram for /Lpp
[0.84, 1.6] and wave steepness of 1/20. Table 3
presents the susceptibility analysis of parametric
rolling of the 16 fishing vessels studied in this paper.
This Table presents results for /Lpp [0.84, 1.6]
and wave steepness of 1/20. Similarly to Table 3, the
threshold values were calculated by using Hayashi
(1953) and ABS (Shin et al. 2004) method. From
Table 3 it can be inferred that FV1 (Portuguese),
FV16 and FV20 (Peruvian), do not present
vulnerability to parametric resonance in head seas
for the defined wave parameters and its determined
forward speed for susceptibility criteria (Vpr).
Moreover, FV1 and FV20 do pass the check of 2008
IS Code adapted to longitudinal wave scenarios
(Mantari et al. 2011a). Opposite occur to the rest of
fishing vessels at COLC and sailing condition
(vessel speed and wave parameters), because they do
not pass the frequency and/or damping threshold
condition for parametric resonance, i.e. they have
vulnerability to parametric resonance in head seas.
Therefore, their severity should be also determined.
Figure 8. Transom of different kinds of fishing vessels, DT,
ITPS, without transom.
The FV18, FV22 and FV23 do not pass: (a) the
frequency and damping threshold condition; (b) the
check of 2008 IS Code adapted to longitudinal wave
scenarios (Mantari et al. 2011a), for the same
abovementioned wave parameters, and for these
reasons her severity should be also determined.
However, the results that came up from this
study, related to these vessles, should be treated
carefully, because: (a) the present method used to
calculate parametric resonance of this particular
vessel is not suitable (the GM variation can no be
modeled as a sinusoidal function); (b) The ITPS
fishing vessels less than approximately 40m in
length, which have chinned hull, seem to be
beneficial to the avoidance of parametric resonance
(Mantari et al. 2011a). Then further studies are
needed.
FV25 and FV26 do not pass: (a) the frequency
and damping threshold condition; (b) the check of
2008 IS Code adapted to longitudinal wave
scenarios; and (c) present potential for stability
failure. Therefore, for more reason, their severity
should be determined as well.
Finally, it is important to point out that the
analysis of the changes in stability in waves gives
indications about the susceptibility to parametric roll
but it is still necessary to consider the dynamic effect
of waves on fishing vessels.

Table 3. Susceptibility analysis of parametric rolling.
Ince-Strutt diagram ( =0.03)
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.1
0
0.1
5
0.2
0
0.2
5
0.3
0
0.3
5
0.4
0
0.4
5
p
q
q1 q2 FV1 FV6 FV8FV10 FV14 FV15 FV16 FV18FV19 FV20 FV21 FV22 FV23FV24 FV25 FV26 q1h q2h
Figure 9. Linear and high order approximation for the
boundary of the first instability zone (Ince-Strutt diagram).
/Lpp [0.84, 1.6], wave steepness of 1/20.
3.3 Stability under operational loading condition in
beam waves
Peruvian and Portuguese purse seiners as the ones
presented in Figure 10 are studied in this thesis.
The fishing vessel “FV6”, when the fishing gear
loads, as presented in Table 4, are considered,
comply successfully with the energy balance
analysis, but they become dangerous and lead to
total failure when the gusty wind is also included,
see Figure 11.
The fishing vessel “FV8”, when only the fishing
gear loads are considered, comply successfully with
the energy balance analysis, except by fastened
condition, but they become dangerous and lead to
the total failure when the gusty wind is also
included, see Figure 12. It is important to remark
that only partial winch pull were used for this fishing
vessel, which is not the case for the fishing vessel
“FV6”, see Table 4. The unfavorable hydrostatics
and her low displacement play against her intact
stability, in a critical fishing trip scenario.
Additionally, due to the difference between the
Atlantic and Pacific Ocean, for this Portuguese
fishing vessels is reasonable use wind speed of 26
m/s, as mentioned above. Then it is even more
unfavorable when this wind is considered.
After the several calculations made on the fishing
vessels “FV8”, with different fishing gear forces and
scenarios of fishing trip scenarios (not include in this
Thesis for lack of space), it can be concluded that
this particular fishing vessel has over dimensioned
machinery on deck. Then, preventive action should
be taken to asses her intact stability during a critical
fishing trip scenario. Fortunately, the Portuguese
fishing fleet, particularly this fishing vessel (as
fishing vessel “FV8”), fish around 13.5 tons of fish
(Mantari et al. 2011a). Then it seems that is very
difficult to reach such tension on the cables or net as
presented in Table 4. This is maybe why there is not
casualties reported due to fishing gears forces
(Antão and Guedes Soares 2004). However, in each
of the fishing trip scenarios, for example pursing, the
cable can get fastened and then the tension on this
cable can reaches these values (see Table 4), then
special attention need to be taken to such situations.
In the Peruvian fleet, for a fishing vessel of
similar size as “FV8”, she normally could fish more
than 100 tons (Mantari et al. 2011a). Then, fish
recovering (fishing trip) is dangerous, and it is
possible to reach these tension values or forces as
presented in the Table 4. Moreover, it is believed
that casualties due to fishing gear forces are
frequently (Mantari et al. 2009a).
This study also shows that in particular fishing
trip scenario the IMO rough weather criterion is
unconservative.
Figures 11-12, show that the combined effect of
the fishing gear and moderate to whole gale wind
description can be larger than the requirements of
the weather criterion as pointed out also in IMO
(1979), Tadanobu Machii et al. (1989), Gefaell
(2005), Mantari et al. (2009, 2009a, 2011b).
Finally, with respect to the fishing gear heeling
moment, it can be said that few or limited number of
research articles are available in the literature. A
literature survey shows few articles dealing with
fishing gear forces, and any article dealing with

fishing gear forces combined with waves or winds. It
is perhaps due to the fact that nowadays there is not
abundance of natural resources (fish), which may
cause danger in a fishing trip scenario. However,
exist the possibility that the net may be fastened at
the bottom and generate a stability failure.
Moreover, some countries have still abundance of
fish and the tendency to increase machinery onboard
still exist, as mentioned above. Therefore, the
fishing gear forces acting individually of in
combined action with waves and winds should be
considerer for further research.
Table 4. Fishing gear forces (Tons) acting on the 7 fishing vessels.
4 CONCLUSIONS
In this paper the changes of restoring energy
with waves were studied for several fishing
vessels, identifying the effect of fishing vessels
size and hull form. These calculations indicate
how the stability is sensitive to the changes from
one wave profile to another in longitudinal waves,
which can be related with the susceptibility of the
vessel to parametric roll. Potentials for stability
failure are given.
With respect to the fishing gear heeling
moment, the calculations presented in this paper,
show that fishing gear heeling moments are more
important than the heeling moments produced by
the weather criterion, and, effectively, a
combination of them leads to capsizing even when
the operational load condition is normal.
For general understanding and acceptance, the
new IMO intact stability criterion should be
completed, i.e. it should consider all the aspects
related to the stability and cover all the variants
that can exist.
At the moment the IMO stability criterion does
not assure safety, neither, in longitudinal and
beam waves, making a decision support system
very useful for the safety of certain fishing
vessels.
201918171615141311 12109876543210
COZINHA
PORÃO (104.8 m^3)
MESSE ALOJAMENTOS
CASA
DE
BANHO
PAIOL
DA
AMARRARUFO
PA
IOL
DO
PR
OP
UL
SO
R D
E
PR
OA
E D
O S
ON
AR
CASA DAS
MÁQUINASCOMBUSTÍVEL
(7.1 M^3)
COMBUSTÍVEL
(2.6 M^3)
COMBUSTÍVEL
(1.2 M^3)
COMBUSTÍVEL
(2.0 M^3)
ÁGUAS NEGRAS
(2.4 M^3)
COMBUSTÍVEL
(0.5 M^3) COMBUSTÍVEL
(1.6 M^3)
ÁGUA
DOCE
(2.5 M^3)
CO
MB
US
TÍV
EL
(3.5
M^3
)
Figure 10. General arrangement of two purse seiners fishing vessels, Portuguese (smaller) and Peruvian (bigger).

-10 0 10 20 30 40 50 60-0.1
0
0.1
0.2
0.3Intact stability at fishing operation, U=15m/s
Heel angle (deg)R
igh
tin
g a
rm (
m)
-10 0 10 20 30 40 50 60-0.1
0
0.1
0.2
0.3Intact stability at fishing operation, U=19m/s
Heel angle (deg)
Rig
hti
ng
arm
(m
)
-10 0 10 20 30 40 50 60-0.1
0
0.1
0.2
0.3Intact stability at fishing operation, U=26m/s
Heel angle (deg)
Rig
hti
ng
arm
(m
)
GZ
C1, hauling
C2, pursing
C3, hauling
C4, pursing
C5, fastened
H.WindUm/s Arm
H.W.Um/s + C1, hauling
H.W.Um/s + C2, pursing
H.W.Um/s + C3, hauling
H.W.Um/s + C4, pursing
H.W.Um/s + C5, fastened
Figure 11. Inclining arms due to external forces (wind and fishing gear loads) and restoring arms of the fishing vessel FV6.
-10 0 10 20 30 40 50 60-0.1
0
0.1
0.2
0.3
0.4Intact stability at fishing operation, U=15m/s
Heel angle (deg)
Rig
hti
ng
arm
(m
)
-10 0 10 20 30 40 50 60-0.1
0
0.1
0.2
0.3
0.4Intact stability at fishing operation, U=19m/s
Heel angle (deg)
Rig
hti
ng
arm
(m
)
-10 0 10 20 30 40 50 60-0.1
0
0.1
0.2
0.3
0.4Intact stability at fishing operation, U=26m/s
Heel angle (deg)
Rig
hti
ng
arm
(m
)
GZ
C1, hauling
C2, pursing
C3, hauling
C4, pursing
C5, fastened
H.WindUm/s Arm
H.W.Um/s + C1, hauling
H.W.Um/s + C2, pursing
H.W.Um/s + C3, hauling
H.W.Um/s + C4, pursing
H.W.Um/s + C5, fastened
Figure 12. Inclining arms due to external forces (wind and fishing gear loads) and restoring arms of the fishing vessel FV8.
ACKNOWLEDGMENT
This work has been performed within the project
“SADEP-Decision support system for the safety of
fishing vessels subjected to waves”. The project has
been financed by the Foundation for Science and
Technology (“Fundação para a Ciência e a
Tecnologia”), from the Portuguese Ministry of
Science and Technology, under contract
PTDC/EME-MFE/75233/2006. REFERENCES Amagai K., Ueno K. and Kimura N. 2000. Characteristics of
roll motion for small fishing boats, Contemporary Ideas on
ship stability, Vassalos D. et al. (Editors), Elsevier Science, 137-148
Antão P., Guedes Soares C. 2004. Analysis of Fishing Vessel Accidents (in Portuguese), in: As Actividades Marítimas e a Engenharia. C. Guedes Soares and V. Gonçalves de Brito (Eds.), Lisbon: Salamandra. pp. 627-643
Antão, P.; Almeida, T.; Jacinto, C., and Guedes Soares, C., 2008. Causes of Occupational Accidents in the Fishing Sector in Portugal. Safety Science. 46:885-899.
Bulian, G., Francescutto, A., 2006. Safety and operability of fishing vessels in beam and longitudinal waves. International Journal of Small Craft Technology, London, UK: RINA.
Di Jin, Eric Thunberg, 2005. An analysis of fishing vessel accidents in fishing areas off the northeastern United States. Safety Science 43 (2005) 523-540.
De Juana Gamo, J., Arias Rodrigo, C., Pérez Rojas, L., 2005. On the Parametric Rolling of Fishing Vessels. International

Conference on Marine Research and Transportation, ICMRT'05, Ischia (Italy), September.
Dickey D. H., 2008. Analysis of fishing Vessels Casualties (A Review of Lost Fishing Vessels and Crew Fatalities, 1992-2007) United States Cost Guards; Compliance Analysis Division (CG-5452); 2100 Second Street, S.W.; Washington, DC 20593-0001.
Francescutto, A., 2007. The intact ship stability code: Present status and future developments. Proceedings of the 2nd International Conference on Marine Research and Transportation, Naples, Italy, Session A, pp. 199-208.
Francescutto, A., 2002. Intact ship stability-the way ahead. Proceedings of the 6th International Ship Stability Workshop, Webb Institute.
Fonseca, N., Perez, L., Rojas, L. and Guedes Soares, C. 1996. Theoretical and Experimental Study of the Seakeeping of a Tuna Fishing Vessel (in Portuguese). Ingenieria Naval, 1996, Issue 733, pp. 44-55.
FAO/ILO/IMO, 2005. Voluntary Guidelines for the Design, Construction and Equipment of Small Fishing Vessels.
Guedes Soares, C. and Teixeira, A. P., 2001. Risk Assessment in Maritime Transportation. Reliability Engineering and System Safety. 2001; 74:299-309.
Havold, J.I., 2009. Safety culture aboard fishing vessels. Safety Sci. (2009), doi:10.1016/j.ssci.2009.11.004.
Hashimoto, H., Umeda, N., Ogawa, Y., Taguchi, H., Iseki, T., Bulian, G., Toki, N., Ishida, S., Matsuda, A., 2008. Prediction methods for parametric rolling with forward velocity and their validation.
Hamamoto, M. and Panjaitan J., 1996. A Critical Situation Leading to Capsize of Ships in Astern Seas. Journal of the Society of Naval Architects of Japan, 180: 215-221.
Gefaell G. 2005. Some consideration about the stability and safety of fishing vessels less than 24m of length Naval Engineering, April, 46-58
IMO Subcommittee on safety of fishing vessels 1979. Effect of fishing gear on the stability of fishing vessels interaction International Maritime Organization, London.
IMO-FSI 15/14 2006. Illegal unregulated and unreported (IUU) fishing and implementation of resolution A. 925(22) International Maritime Organization, London.
IMO-MSC.1/Circ.1200 2006. Interim guidelines for alternative assessment of the weather criterion International Maritime Organization, London.
IMO-SLF 51/4/3 2008. Revision of the intact stability code, A proposal of new generation stability criteria as an example, submitted by Japan International Maritime Organization, London.
Kose E., Gosine R.G., Dunwoody A.B., Calisal S.M. 1995. An expert system for monitoring dynamic stability of small craft, Ocean Engineering, Vol. 20, pp: 13-22
Machii T., Nose Y., 1989. Safety of a Peruvian small wooden purse seiner during fishing operation. Nippon Suisan Gakkaishi 55 (11):1921-1925.
Mantari, J.L., Ribeiro e Silva, S., Guedes Soares, C., 2009a. Intact stability of fishing vessels under operational loading conditions. Proceedings 13th Congress of International Maritime Association of the Mediterranean (IMAM 2009); Istanbul Technical University, Turkey, pp: 185-193.
Mantari, J.L., Ribeiro e Silva, S., Guedes Soares, C., 2009b. Variations on Transverse Stability of Fishing Vessels due to Fishing Gear Pull and Waves. XXI Pan American Congress of Naval Engineering, Montevideo, Uruguay, October.
Mantari, J.L., Ribeiro e Silva, S., Guedes Soares, C., 2011a. Loss of fishing vessel’s intact stability in longitudinal waves. Int. J. Small Craft Tech. Trans. RINA, 153 Part B1 (2011), pp. 23–37.
Mantari, J.L., Ribeiro e Silva, S., Guedes Soares, C., 2011b. Intact stability of fishing vessels under combined action of
fishing gear, beam waves and wind. Ocean Engineering 38 (2011):1989-1999.
Maron, A., Carrillo, E., Valle, J., Prieto, M.E., Gutierrez, C., Taboada, M., 2006. Investigation on the capsize of a small fishing vessel in following seas. Proceedings of the 9th International Conference on Stability of Ships and Ocean Vehicles.
Neves, M.A.S., Perez, N.A., Lorca, O.M. 2002. Experimental analysis on parametric resonance for two fishing vessels in head seas. Proceedings of the 6th International Ship Stability Workshop, Webb Institute.
Neves, M.A.S., Perez, N.A., Valerio, L., 1999. Stability of small fishing vessels in longitudinal waves. Ocean Engineering, 26: 1389-1419.
Neves, M.A.S., Rodriguez, C.A., 2006. On unstable ship motion resulting from strong non-linear coupling. Ocean Engineering 33: 921-935.
Neves, M.A.S., Rodriguez, C.A., 2007. Influence of non-linearities on the limits of stability of ships rolling in head seas. Ocean Engineering 34: 1618-1630.
Nowacki, H., Ferreiro L.D., 2003. Historical roots of the theory of hydrostatic stability of ships. Proceedings STAB2003, Pérez-Rojas L. (ed.), Madrid, Spain, pp. 643-653.
Nuñez J.F., José de Lara R., Muñoz F. 2007. Technical study of the modification and implementation in the Spain fishing vessel fleet to develop the activities of Tourist fishing in Spain, (in Spanish) Fundacion General de la Universidad Politécnica de Madrid
Pérez-Rojas L., Abad R., Pérez-Arribas F., Arias C. 2003. Some Experimental Results on the Stability of Fishing Vessels Proceedings STAB2003, Pérez-Rojas L. (ed.), Madrid, Spain, pp. 643-653.
Pérez-Rojas L., Arribas F.P., Rodríguez R.Z., Pacheco A.G. 2006. On the accidents of small fishing vessels, Proceedings STAB2006. M. Neves (Ed.), COPPE, UFRJ, Rio de Janeiro, Brasil, pp. 669-676.
Petursdottir G., Hannibalsson O., Turner J. 2001. Safety at sea as part management of fisheries, FAO Fishing Circular No. 966. Roma: 1-43.
Piniella, F., Soriguer, M.C., Walliser, J., 2008. Analysis of the specific risks in the different artisanal fishing methods in Andalusia, Spain. Safety Science 46 (2008) 1184-1195.
Ribeiro e Silva, S., Pérez-Rojas, L. and Guedes Soares, C., 2004. Experimental study of parametric rolling of a fishing vessel (in Portuguese). in: As Actividades Marítimas e a Engenharia. Guedes Soares, C., Gonçalves de Brito, V. (Eds), Edições Salamandra, Lda., Lisboa, pp. 645-663.
Ribeiro e Silva, S., Santos, T. and Guedes Soares, C., 2005. Parametrically Excited Roll in Regular and Irregular Head Seas. International Shipbuilding Progress, 52(1):29-56.
Rothblum, A.R., 2000. Human Error and Marine Safety. National Safety Council Congress and Expo, 13–20 October, Orlando, FL.
Santos T., Villavicencio R., Guedes Soares C. 2008. Safety and stability of fishing vessels on waves (in Portuguese), in: O Sector Maritimo Português Guedes Soares, C., Costa Monteiro, C. (Eds), Edições Salamandra, Lda., Lisboa,
Townsend, P.R., 2005. Increase of hydraulic oil flow in the fishing equipment of a fishing vessel of 210 tons. XVIII Pan American Congress of Naval Engineering, Guayaquil, Ecuador.
Umeda. N., Matsuda. A., Hamamoto M. and Suzuki S. 1999. Stability assessment for intact ship in the light of model experiments J Mar Sci Technol, 4 : 45-57.
Wang J., Pillar A., Kwon Y.S., Wall A.D., Loughran Rodríguez C.G. 2005. An analysis of fishing vessel accidents, Accident Analysis and Prevention, 37: 1019-1024.


















