

Spline Interpretation ABC Introduction and outline Based mostly on Wikipedia.
39
Spline Interpretation ABC Introduction and outline Based mostly on Wikipedia
-
date post
20-Dec-2015 -
Category
Documents
-
view
229 -
download
1
Transcript of Spline Interpretation ABC Introduction and outline Based mostly on Wikipedia.
Spline Interpretation ABC
Introduction and outline
Based mostly on Wikipedia

Spline Interpretation
• Spline is a flat flexible strip of thin narrow piece of wood, metal, or plastic used in drawing curved.
• Mathematically, spline means curve fitting mostly using certain piecewise low degree polynomials.
• The main reason to use low degree polynomial is to avoid Runge’s phenomenon.

Runge’s Phenomenon
2
i n
1Given a function : f(x) = .
1 25 x
We want to intropolate at equal spaced points:
2x = 1 + i 1 , for i = 1, 2, ..., n+1 , with polynomial p (x).
n
For n = 1 ; we have only two points to define a str
aight line.
For n = 2 ; we have three point and a quadratic equation, ...

Runge’s PhenomenonRed: data; blue: 5th order; green: 9th order

Runge’s Phenomenon
nn 1 x 1
It can be shown that
f ( x ) p ( x ) .
One of the solutions to the Runge's phenomenon
is to use spline with piecewise low degree polynomials
and not try to fit the whole range. E
lim max
ven in the local
fitting, low degree should be preferred.

Definition of Spline
0 1 2 n 1 n
0 0 1
1 1 2
n 1
Given n+1 data points (known as knots), x, such that
x < x < x < .... < x < x ,
a pline function S(x) of degree k is
S ( x ) x x , x
S ( x ) x x , xS( x ) =
:
S ( x )
n 1 n
i
'
x x , x
where each function S (x) is a polynomial of degree k.

Linear Spline
i 1 ii i i
i 1 i
i 1 i
Linear spline is the simplest spline with data points
connected by straight lines:
y y S (x) = y + x x .
x x
As spline must be continuous at each data points, we must have
S (x) = S (x
i i 1i 1 i i 1 i i 1 i
i i 1
i 1 ii i i i i
i 1 i
) for all i = 1, 2, ....n-1.
Indeed, we have
y y S (x ) = y + x x = y
x x
y y S (x ) = y + x x
x x
i = y
Quadratic Spline
2
2i 1 ii i i i i
i 1 i
i
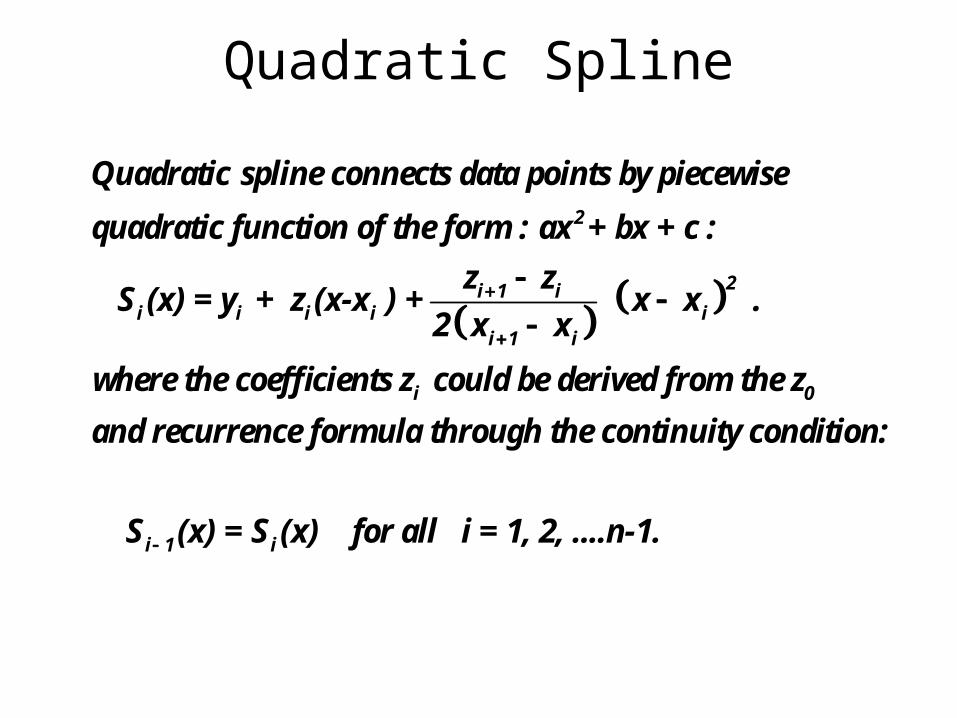
Quadratic spline connects data points by piecewise
quadratic function of the form : ax + bx + c :
z z S (x) = y + z (x-x ) + x x .
2 x x
where the coefficients z could be derived from the z
0
i 1 i
and recurrence formula through the continuity condition:
S (x) = S (x) for all i = 1, 2, ....n-1.

Quadratic Spline
2i i 1i 1 i i 1 i 1 i i 1 i i 1 i
i i 1
2i 1 ii i i i i i i i i
i 1 i
i i 1i i 1
i i 1
Indeed, we have
z z S (x ) = y + z (x x ) + x x = y
2 x x
z z S (x ) = y + z ( x x ) + x x = y
2 x x
This gives
y y z = z + 2 ,
x x
which is ap
proximately a running derivative.
Cubic Spline
3 2
i i
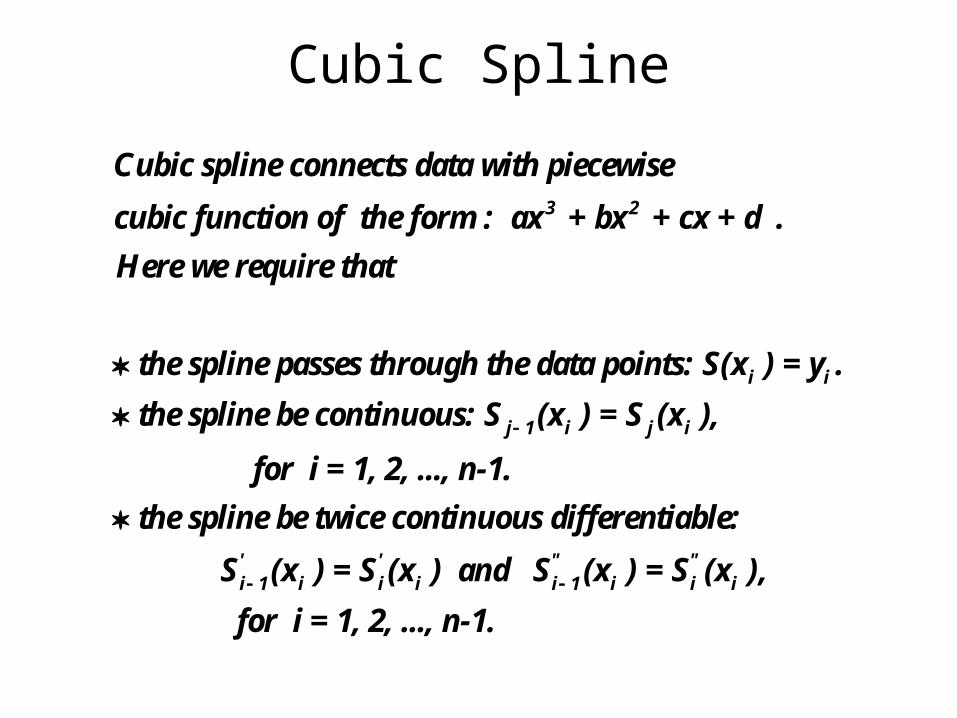
Cubic spline connects data with piecewise
cubic function of the form : ax + bx + cx + d .
Here we require that
the spline passes through the data points: S(x ) = y .
the spline be continuous:
j 1 i j i
' ' " "i 1 i i i i 1 i i i
S (x ) = S (x ),
for i = 1, 2, ..., n-1.
the spline be twice continuous differentiable:
S (x ) = S (x ) and S (x ) = S (x ),
for i = 1, 2,
..., n-1.

Cubic Splinei
i i
For n+1 points, we have n piecewise cubic functions S (x).
We need 4n conditions to determine the polynominals.
The conditions we have are these:
S(x ) = y at all points give
j 1 i j i
S (x ) = S (x ) at interior points
for i = 1, 2, ..., n-1only give
the twice continuous different
n+1condition
iable also a
s
n-1
t int
conditi
erior points
ons
' ' " "i 1 i i i i 1 i i i S (x ) = S (x ) and S (x ) = S (x ),
for i = 1, 2, ..., n-1, give
So we have a total of conditions
2n -2 c
only.
onditions
4n - 2 We are two rt sho
.

Cubic Spline
' '0 k
" "0 n
These give us freedom to choose:
1. Clamped cubic spline:
S (x ) = ; S (x ) = , with and given.
2. Natural spline:
S (x ) = S (x ) = 0.
3. Periodic
2 fre
cubi
e conditio
c spline:
ns
S(
' ' " "0 n 0 n 0 nx ) = S(x ); S (x ) = S (x ) ; S (x ) = S (x )

Hermite Spline
3 2 200
3 2 210
3 2 201
3 2 211
'00 10
The 4 hermite are these:
h (t) = 2t + 3t +1 = (1+2t)(1-t)
h (t) = t - 2t + t = t (1-t)
h (t) = - 2t +3t = t (3-2t)
h (t) = t - t = t (t-1)
Note: h (0) = 1; h
basis functi
(0) = 1
ons
; '01 11h (1) = 1; h (1) = 1.
As these values are unity, we can use them to control
values of any function with initial and end points values
and slopes.

Hermite spline
0 0 1 1
00 0 10 0 01 1 11 1
k 1 k
For given P , M and P , M values, at the initial and
end points, we can have a polynomial as,
p(t) = h (t) P + h (t) M + h (t) P + h (t) M
The interpolation in the interval (x x ) shold
00 0 10 0 01 1 11 1
kk 1 k
be
p(t) = h (t) P + h (t) M + h (t) P + h (t) M ,
x xwhere h = x x and t =
h h
.h

Hermite spline
k 1 k k k 1
kk 1 k k k 1
In Hermite spline, the choice of the slope could be selected
sensibly according to our need:
1. Finite difference spline is the simplest:
P P P P m = , for all internal poin
2 x x 2 x x
ts.

Hermite spline
k 1 k 1
kk 1 k 1
2. Cardinal Spline
P P m = 1 c , with 1 < c < 1 as tension parameter.
2 x x
The parameter,c, controls the length of the tangent.
The case, c = 0, is known as Catmull-Rom spline
Fritsch, F . N .; Carlson, R. E . 1980 " Monotone Piecewise Cubic Interpolation" .
SIAM Journal on Numerical Analysis
,
.
3. Monotonic spline
MatLab 'pchip' is monotonic spline based on Fritsch and Carlson.
17 2 : 238 – 246 .

Hermite spline
• In general, cubic spline does not guarantee monotonicity even for monotonic data.
• Hermite monotonic spline, however, guarantees monotonicity between data points.
• The advantage is the elimination of overshoots.• The prices to pay are these:
– we no longer have the smoothness of continuity in curvature and
– we have to inject another subjective idea of monotonic and/or variations.

Comparisons between Cubic Natural and Hermite Splines
An Example

Data
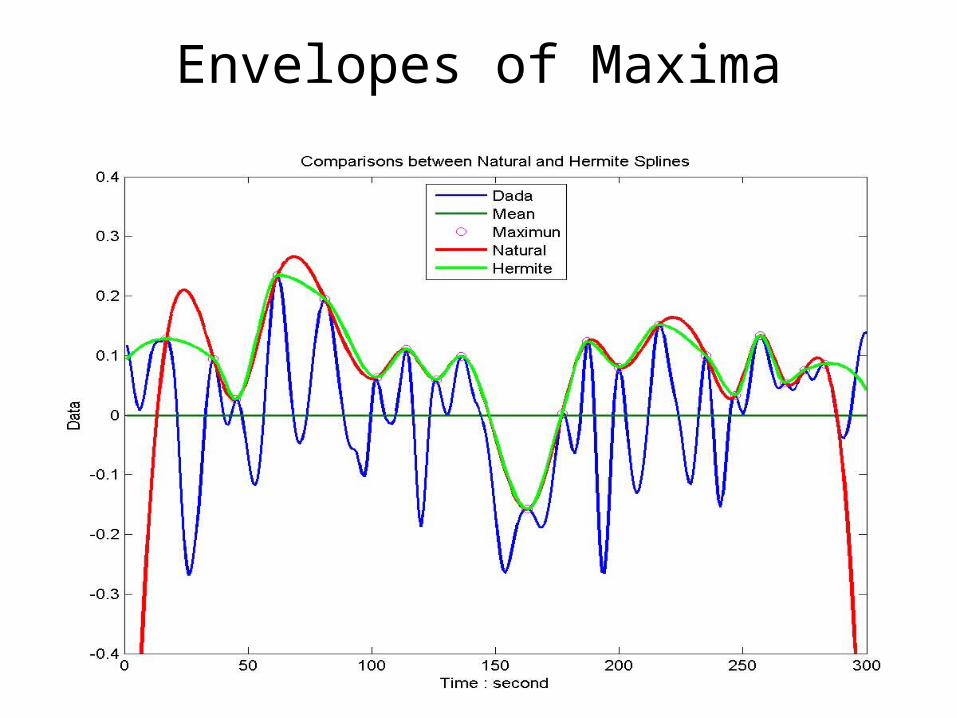
Envelopes of Maxima

Envelopes of Minima
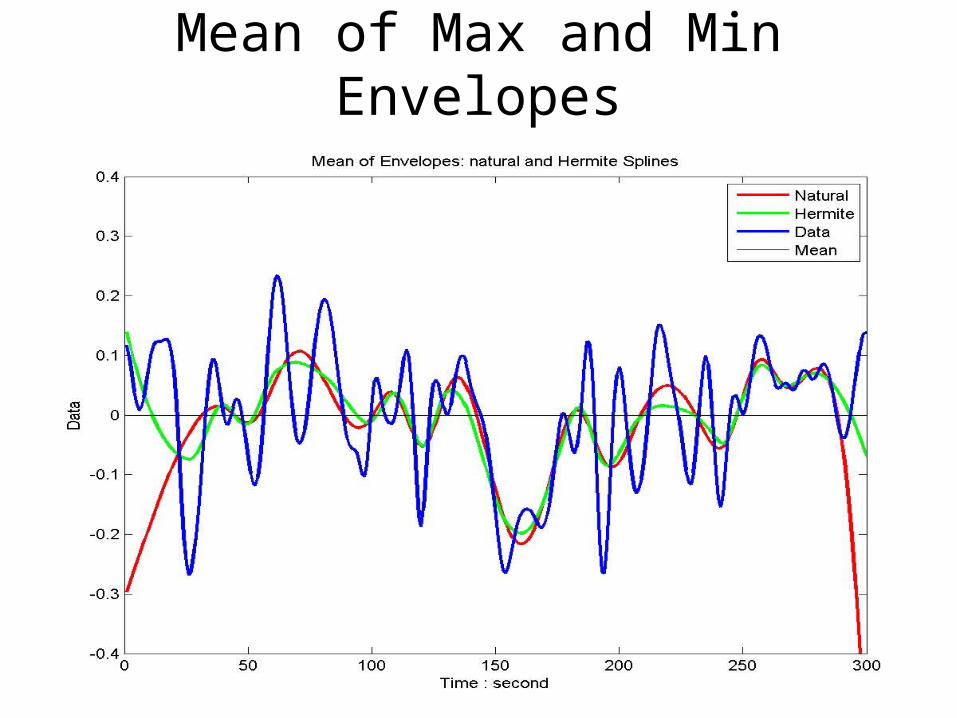
Mean of Max and Min Envelopes

Difference between Mean of Max and Min Envelopes

First Proto-IMF

B-Spline
Something used extensively by Computer Aided Design (CAD),
but we have found limited use of it.

Bézier CurveA Bezier curve is a basis function dependent parametric curve
determined by a a set of control points (or control polygon).
It has the following properties:
1. The basis functions are real
2. The degree of the polynomial is one less thanthe control points.
3. The first and last points of the curve and control points coincide.
4. The tangents at the beginning and end point coincide with the
control polygon.
5. The whole curve is contained in the convex hull.
6. The curve has the variation-diminishing property.
7. The curve is invariant under affine transformation.

Bézier Curve
0 1
0 0 1 0 1
0 1 2
1. Linear Bezier curves
Given points P and P , a linear Bezier curve is a straight line;
B( t ) P t( P P ) ( 1 t )P tP for t [0,1].
2. Quadratic Bezier curves
For given points P , P , and P ,
B(t
2 20 1 2
0 1 2 3
3 2 2 30 1 2 3
) = (1-t) P 2t( 1 t )P t P , for t [0,1].
3. Cubic Bezier curves: for Given P , P , P , and P ,
B(t) = (1-t) P 3t( 1 t ) P 3t ( 1 t )P +t P , for t [0,1].

Cubic Bezier Bases

Bézier Curve
0 1 2 n
nn n i ii i
i 0
n 0 1 2 n
n
The General Bezier curves : For Given P , P , P , ... P ,
B(t) = C (1-t) t P for t [0,1].
Therefore, the Recursive Formula:
If we have B (t) for P , P , P , ... P , we should have
B ( t ) (1
n 1 n'-t)B (t) tB ( t ), where n'=1, 2, ...n.
i.e. Degree n Bezier curve can be expressed as the cpmnination of 2
degree (n-1) Bezier curves.

An example

Rational Bézier Curve
0 1 2 n
nn n i ii i i
i 0n
n n i ii i
i 0
The Rational Bezier curves: for Given P , P , P , ... P ,
C (1-t) t P w B( t )
C (1-t) t w
The Rational Bezier curve is simply Bezier curve with
weighting function , w .

B-Spline• A B-spline is a generalization of the Bézier
Curve; A B-spline with no internal knots is a Bézier Curve.
• It is generated through Cox-de Boor recursion formula.
• A further generalization is NURBS: NonUniform Rational B-Spline.
• See for example, David F. Rogers: An Introduction to NURBS. Morgan Kaufmann, San Francisco, 2001

B-Splinei
i
m n 1
i i ,ni 0
For given m+1 monotonic values of t [0,1], known knots,
a B-spline of degree n for control points, P , is a paramtric
curve composed of basis B-Spline of degree n
S(t) = P b ( t ) , for t [
n m n
i ,n
j j 1
j ,0
j j n 1j ,n j ,n 1 j 1,n 1
j n j j n 1 j 1
t , t ] ,
where b ( t ) are generated by the Cox-de Boor recursion formula:
1 if t t < t b (t) =
0 otherwise
t t t t b (t) = b (t) + b (t) .
t t t t

Properties of B-Spline• A B-spline could have degree n; control points,
p; and knots, m, each independent to others, but m ≥ p. It is much more flexible.
• For n=3, p=10, and m=14, we have B-spline at left and Bezier curve at right.

Properties of B-Spline• In general, the lower the degree, the closer the
curve follows the control points.• For the same numbers of control points and
knots, but different degrees, the spline results are very different:
• left, n=7; center, n=5; right, n=3.
Properties of B-Spline• B-spline is a piecewise curve.• We must have m=n+p+1.• Clamped spline has to pass the beginning and end
points.• Strong convex hull property• Variation diminishing property• Affine invariance
But B-Spline does not pass through the control points!

Variation Diminishing Property:no straight line (resp., plane) intersects a B-spline
curve more times than it intersects the curve's
control polygon.

Summary
• The differences between different splines seems to be huge.
• Based on principles of least interferences and maximum smoothness, we selected natural spline as the base for EMD.
• Different splines (except B-spline) should not change the scales of the IMFs, but it would change the shape and energy levels.
• EMD is unique with respect to all parameters selected.



![Block Sparse Compressed Sensing of Electroencephalogram ... · derivative of Gaussian function), a linear spline, a cubic spline, and a linear B spline and cubic B-spline. In [7],](https://static.fdocuments.net/doc/165x107/5f870bc34c82e452c7534b24/block-sparse-compressed-sensing-of-electroencephalogram-derivative-of-gaussian.jpg)














