Spatially Selective Antenna For Very Close Proximity
18
18 High Frequency Electronics High Frequency Design HF RFID Spatially Selective Antenna for Very Close Proximity HF RFID Applications—Part 1 By Boris Y. Tsirline, PhD Zebra Technologies Corporation T his article intro- duces a novel HF antenna with high spatial selectivity—its performance and func- tional characteristics are analyzed for two orthogo- nal alignments of the antenna and the trans- ponder using a simplified mathematical model. This model describes the relationship between the transponder interro- gation zone and the Reader RF power, anten- na and transponder geometries, and their electrical components. In order to describe the properties of a transponder in a non-uniform magnetic field an integral parameter is introduced in place of the commonly used transponder activation magnetic field strength. A set of new measur- able parameters for characterization of the antenna-transponder combination are intro- duced. The interaction of a conventional reso- nant loop antenna with nearby transponders is examined and the antenna’s inability to dif- ferentiate the targeted transponder from the adjacent transponders is demonstrated. Introduction RFID (Radio Frequency Identification) technology, originally developed for automated identification of aircraft and ships as a sec- ondary radar application, has today become a powerful tool in business process automation in many industries. HF RFID (High Frequency RFID) is based on magnetic cou- pling between the transponder and the anten- na and is highly immune to the interferences typical for industrial environments. A great variety of HF RFID applications exist today. By 2006, most of the manufacturing and ser- vice industries had adopted this technology, including medication authentication in the pharmaceutical industry, patient identifica- tion in the health care industry, product iden- tification and inventory tracking in the retail industry, access restriction for security sys- tems and tickets processing in transportation service. A wide application spectrum spreads from commercial and military to home and entertainment sectors. Recently introduced Near Field Communication (NFC) technology is also based on the magnetic coupling tech- nology [1] and is similar to Contactless Smart Card protocol. This technology opens new applications for the RFID technology, such as automatic payment using cellular phones in close proximity communication as a transac- tion vehicle. Three key elements comprise every RFID system: a transceiver (Reader), a transponder, and an antenna. In order to satisfy the grow- ing demands for HF RFID equipment, many vendors offer two of the three—the HF Readers and the transponders [2]. The third element of the system, the antenna, is not often readily available. Although HF magnet- ic antennas are widely offered for radio broad- casting, transmission sources location finders, and for EMI/RFI measurements, HF RFID antenna selection is limited. While RFID and non-RFID magnetic antennas share common features such as sensitivity to the magnetic component of RF wave and the ability to gen- erate one (in the near field), two principal dif- ferences exist. First, HF RFID antennas activate battery- less transponders by transferring the magnet- This multi-part article provides background on RFID antenna-transponder interactions, and presents an antenna technique that achieves greater discrimi- nation when reading multiple transponders From February 2007 High Frequency Electronics Copyright © 2007 Summit Technical Media, LLC
description
This multi-part article provides background on RFID antenna-transponder interactions, and presents an antenna technique that achieves greater discrimination when reading multiple transponders
Transcript of Spatially Selective Antenna For Very Close Proximity

18 High Frequency Electronics
High Frequency Design
HF RFID
Spatially Selective Antenna forVery Close Proximity HF RFIDApplications—Part 1
By Boris Y. Tsirline, PhDZebra Technologies Corporation
This article intro-duces a novel HFantenna with high
spatial selectivity—itsperformance and func-tional characteristics areanalyzed for two orthogo-nal alignments of theantenna and the trans-ponder using a simplified
mathematical model. This model describes therelationship between the transponder interro-gation zone and the Reader RF power, anten-na and transponder geometries, and theirelectrical components.
In order to describe the properties of atransponder in a non-uniform magnetic fieldan integral parameter is introduced in place ofthe commonly used transponder activationmagnetic field strength. A set of new measur-able parameters for characterization of theantenna-transponder combination are intro-duced. The interaction of a conventional reso-nant loop antenna with nearby transpondersis examined and the antenna’s inability to dif-ferentiate the targeted transponder from theadjacent transponders is demonstrated.
IntroductionRFID (Radio Frequency Identification)
technology, originally developed for automatedidentification of aircraft and ships as a sec-ondary radar application, has today become apowerful tool in business process automationin many industries. HF RFID (HighFrequency RFID) is based on magnetic cou-pling between the transponder and the anten-na and is highly immune to the interferencestypical for industrial environments. A great
variety of HF RFID applications exist today.By 2006, most of the manufacturing and ser-vice industries had adopted this technology,including medication authentication in thepharmaceutical industry, patient identifica-tion in the health care industry, product iden-tification and inventory tracking in the retailindustry, access restriction for security sys-tems and tickets processing in transportationservice. A wide application spectrum spreadsfrom commercial and military to home andentertainment sectors. Recently introducedNear Field Communication (NFC) technologyis also based on the magnetic coupling tech-nology [1] and is similar to Contactless SmartCard protocol. This technology opens newapplications for the RFID technology, such asautomatic payment using cellular phones inclose proximity communication as a transac-tion vehicle.
Three key elements comprise every RFIDsystem: a transceiver (Reader), a transponder,and an antenna. In order to satisfy the grow-ing demands for HF RFID equipment, manyvendors offer two of the three—the HFReaders and the transponders [2]. The thirdelement of the system, the antenna, is notoften readily available. Although HF magnet-ic antennas are widely offered for radio broad-casting, transmission sources location finders,and for EMI/RFI measurements, HF RFIDantenna selection is limited. While RFID andnon-RFID magnetic antennas share commonfeatures such as sensitivity to the magneticcomponent of RF wave and the ability to gen-erate one (in the near field), two principal dif-ferences exist.
First, HF RFID antennas activate battery-less transponders by transferring the magnet-
This multi-part article provides background on
RFID antenna-transponderinteractions, and presents
an antenna technique thatachieves greater discrimi-
nation when reading multiple transponders
From February 2007 High Frequency ElectronicsCopyright © 2007 Summit Technical Media, LLC

20 High Frequency Electronics
High Frequency Design
HF RFID
ic field energy to them. Second, antennas maintain the bi-directional data transfer between a Reader and transpon-ders. The transponder data transmission is based on the“Load” modulation technique [3], which enables theReader to detect an antenna impedance modulationcaused by a transponder. Further discussions will assumethat a Reader is sensitive enough to assure a reliabletransponder interrogation as soon as it gets energized.
RFID magnetic antennas for conventional applica-tions are aimed at activation and identification of multi-ple transponders at the longest possible range. The goal ofthe antenna design for such applications is to detecttransponders’ presence and provide a wide coverage area.Transponders are activated by uniform magnetic fieldsand the antenna interaction within the interrogationzone is largely independent of their parameters.
Antenna design methodology considerably changes forRFID applications that demand encoding a single, target-ed transponder surrounded by others. For these applica-tions the targeted transponder is positioned in very closeproximity to the antenna and a specified interrogationregion turns out to be comparable with the transponderdimensions. In this situation the antenna-transponderdistance is only a small fraction of their sizes—transpon-ders operate in a principally heterogeneous magneticfield and their interaction with an antenna is heavilydependent as much on the distance between them as ontheir dimensions and mutual alignment.
To be successful in performing an interrogation of onlyone transponder an antenna should have a feature we cancall spatial selectivity (SS). Spatial selectivity is anantenna’s ability to communicate with a single transpon-der, staying within the maximum available RF powerfrom a Reader, and not communicating with neighboringtransponders.
Previously proposed solutions to increase an antenna’sSS were based on shielding and suppression of magneticfield in adjacent areas. The disadvantage of such anapproach is that dimensions of shielding components aregreatly dependent on transponder geometry and must beadjusted for every new transponder type. The shielding ofadjacent areas is only suitable for RFID applicationswhich use one, exclusive form-factor transponder. ForRFID applications working with a variety of transpon-ders, the shielding method inevitably complicates anRFID system, including antenna design.
The scope of this article is to demonstrate anotherstrategy for achieving high SS. This approach is based onan antenna magnetic flux forming technique and a spe-cific antenna-transponder alignment.
The considerations will include:
• Classification of RFID applications and parametricanalysis of HF transponders—“RFID Applications
Utilizing HF Transponders”• Implementation of Transponder Activation
Magnetic Flux parameter for a transponder in anon-uniform magnetic field, and its association withgeometry and electrical properties—“HF Transpon-ders”
• Justification of new characterization parameters foran antenna-transponder structure and qualitativeanalysis of the interaction between a closely spacedconventional HF resonant loop antenna andtransponder—“Antenna-Transponder Characteri-zation”
• New SS antenna development and its mathematicalmodel correlating system performance parameterswith a transponder and antenna geometry and theirmutual orientation—“Magnetic Flux throughTransponder”
• Quantitative analysis of spatially selective antenna-transponder interaction for their two orthogonalalignments—“Antenna-Transponder Interaction”
• Antenna circuit components justification based onthe specified activation magnetic field, availableReader RF power and transponder coupledimpedance—“Antenna Circuit.”
RFID Applications Utilizing HF TranspondersHF RFID applications and their relevant antennas,
magnetically coupled with the transponders working at13.56 MHz, can be at least divided into two industry inde-pendent groups. The first group, as mentioned before, rep-resents the “spatially distributed items” application type.Antenna design for this group is aimed at achieving max-imum operational range with the transponders, which arein the uniform magnetic field and located relatively farfrom an antenna or, in any case, weakly coupled with it.This group can be simply characterized by an inequality
SMAX << D (1)
where SMAX = maximum size of an antenna or transpon-der, and D = distance between an antenna and transpon-der.
Although the numerous wide-ranging technicalpapers, articles and surveys analyzing an antenna opti-mization for this group have been written [3, 4, 5] thereare no works known to the author that are devoted todevelopment of antennas working in very close proximityto transponders.
The distance-dimensions relation (1), meaning ahomogeneous magnetic field for transponders, signifi-cantly simplifies calculations of antenna parameters.Under condition (1) an antenna magnetic flux density dis-tribution is calculated for a point in place of a transpon-der. An antenna can be designed almost independently of

22 High Frequency Electronics
High Frequency Design
HF RFID
a transponder’s position because their presence does notpractically influence antenna electrical properties.
Among the huge variety of RFID applications, a sec-ond group can be distinguished. This group represents a“conveyor” type, or item-level RFID. The demand for anitem-level identification can be encountered, for example,in PCB fabrication, automotive parts manufacturing andassembly, IC manufacturing, book sorting in libraries,ticket processing in transportation service, monetaryvalue certificate handling, enhancement in gaming indus-try, home automation, pharmaceutical manufacturing,implantable medical devices, walking and reading assis-tance for visually impaired people, and smart packaging.
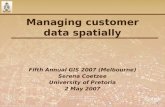
The conveyor type of application is a scenario wheretransponders (attached to the items) are arranged oneafter another and prepared for a sequential interrogationin a short distance to an antenna (Fig. 1). A Reader has toidentify only one targeted object that is surrounded byadjacent items (transponders). This group can be charac-terized by the inequality:
D << SMIN (2)
where SMIN = the minimum size of an antenna ortransponder.
A few divisions of the second group of RFID applica-tions can further include “static-object” and “dynamic-object” sub-groups. A “static-object” is the item (atransponder) that is always positioned for an interroga-tion in close, but fixed distance to an antenna. The degreeof antenna-transponder coupling and their mutual align-ment remain unchanged for every conveyor stop-cycle. A“dynamic-object” sub-group is the one where an aimedtransponder is also surrounded by other adjacenttransponders. In difference from the “static-object” case alonger interrogation range should be made available for atransponder as it travelings on a continuously movingconveyor. And again, a Reader should selectively interro-gate only one predefined transponder among others.
Under the conditions of eq. (2), antenna-transpondercoupling in relation to their mutual alignment changessignificantly. An antenna with low SS will activate thetargeted transponder and two (or more) closely-spacedadjacent transponders. Although a Reader’s anti-collisionfunction can manage an identification of many simulta-neously activated transponders, it is unable to confine atargeted transponder. To discriminate a targetedtransponder at a predefined location using such an anten-na, all transponders (items) must be appropriately spacedalong their traveling path. Unfortunately, the extension ofthe separation interval substantially increases totalinterrogation time. In case of smart label encoding inRFID printers. an increase of the transponder’s pitchcauses noticeable carrier material waste.
In close proximity to an antenna, the 3D magnetic fluxdensity is non-uniform, and the magnetic flux through atransponder depends on its location and orientation with-regard to the antenna. Thus, for RFID applicationsdescribed by eq. (2), an antenna should be developed withconsideration for transponder geometry and its electricalcharacteristics.
HF TranspondersThe dimensions of typical transponders (commonly
called tags) used for HF item-level RFID and other appli-cations vary from approximately 20 by 35 mm, for adevice made by Texas Instruments [6], up to 85 by 135mm for one made by UPM Rafsec [7]. A transponder spec-ification usually includes the IC types, a resonant fre-quency with its tolerance, and the most important param-eter for an antenna design—maximum required activa-tion magnetic field strength HA in the uniform field. Thefield strength ranges approximately from 98 to 120[dBµA/m] depending on ICs used, transponder inductorsand their dimensions and also on how well a transponderis tuned to an operational frequency. In practical design itis more convenient to use H value expressed in [A/m]units. The conversion [dBµA/m] to [A/m] unit gives
Consequently, the transponder activation magneticflux density BA [Vs/m2] for the uniform field can beobtained using
(3)
where µ0 = 4π*1E–07 [Vs/Am] (the free-space magneticpermeability).
The parameter HA is specified for the uniform mag-netic field and can be directly used in calculations of theantennas satisfying the inequality in (1). For applications
B H Vs mA A= ⎡⎣ ⎤⎦µ02/
H A m H dB A m[ / ] {( [ / ] ) / }= −10 120 20µ
Figure 1 · HF antenna for item-level RFID on conveyor.

24 High Frequency Electronics
High Frequency Design
HF RFID
compliant with the inequality of (2) the transponders arein the heterogeneous magnetic field with the spatiallydepended flux density. Antenna calculations for such acase cannot utilize eq. (3) and a Transponder ActivationMagnetic Flux (TAMF) ΦA should be engaged instead.TAMF for the transponder, which is perfectly tuned to anoperational frequency, can be found as
(4)
where A = a transponder loop area (m2).The value A in (4) is the geometry mean dimensions
(GMDm) must be used instead of the transponder coilphysical dimensions [8].
The time varying magnetic flux induces the voltage VCin the transponder coil tuned at resonance equal to theoperational frequency f0 [Hz], thus
or using magnetic flux it gives
(5)
where Q is the transponder quality factor and NT = num-ber of turns of transponder coil.
If the transponder resonant frequency is fR and differ-ent than the frequency f0 then the transponder voltageamplification will depend on a degree of frequency devia-tion (fR – f0) from the operational frequency. Linking thevoltage VC (5) of the parallel resonant circuit, which istypical for HF transponders, with the IC’s specified sup-ply voltage VA, gives
(6)
Equation (6) concludes the more the transponder isdetuned the higher voltage VC is required to achieve thevoltage VA. Then the transponder activation flux ΦA canbe derived equating (6) and (5) and is given by
(7)
From the formula (7) it follows that a detunedtransponder with low Q-factor will have a higher activationmagnetic flux compared with a tuned, high Q transponder.
In general case a quality factor of the parallel reso-nance circuit can be found by considering a transponderequivalent schematic (Fig. 2), which includes a resonant
tuning capacitor C (comprising an imaginary part of anIC’s impedance), a coil inductance L, a resistor RL pre-senting an inductor losses and a resistor RP, which simu-lates a real part of an IC’s impedance. The Q-factor for theLCR parallel circuit is determined as
(8)
Considering (7) and (8) the ΦA value given by (7) ishigher than the activation flux calculated in (4) for thetuned transponder.
In the non-uniform magnetic field a transponder getsactivated when Magnetic Flux through Transponder(MFT) ΦT exceeds ΦA value. Then the activation flux ΦAcan be used in an antenna-transponder evaluation andanalysis as a threshold that defines the boundary condi-tions for a transponder activation interval. The integralparameter MFT characterizing an antenna-transponderstructure is given by
(9)
where BX,Y,Z is the 3D distribution of the magnetic fluxdensity (normal to a surface of a transponder coil) and lin-ear function of the current I circulating in antenna coil.
This current is defined by Reader RF power andantenna equivalent impedance. The impedance of the loopantenna tuned to resonance can be presented by few com-ponents. It consists of a radiation resistance, a resistancethat is equivalent to resistive losses of the coil, includingtuning and matching elements, and an impedance that isinduced by a transponder via magnetic coupling.Considering the fact that a total circumference of anantenna coil is much shorter than an operational wave-
ΦT X Y ZA
B dA Vs= ∗ [ ]∫∫ , ,
QRf L
f LR
L
R
R
P
=+
1
22
ππ
ΦΝA
AR O
R
O T
Vf f
fQ
f Q=
+−( )⎛
⎝⎜
⎞
⎠⎟
⎡
⎣⎢
⎤
⎦⎥1
2
2
2
π
V Vf f
fQC A
R O
R
= +−( )⎛
⎝⎜
⎞
⎠⎟
⎡
⎣⎢⎢
⎤
⎦⎥⎥
12
2
V f QC O T= 2π Ν Φ
V f QC O T= 2π ΒΑΝ
ΦA AB A Vs= [ ]
Figure 2 · Transponder equivalent circuit.

length, the radiation resistance canbe neglected. To simplify further aninitial analysis of an antenna-transponder interaction it is assumedthat the magnetic flux in an antennacoil that is produced by the current ina transponder is insignificant com-pared with the magnetic flux pro-duced by an antenna itself. Thisassumption therefore implies thatthe impedance induced by a tunedtransponder is much smaller thanthe tuned antenna resistive losses.
Antenna-TransponderCharacterization
An HF antenna and a transponderworking in immediate proximity toeach other form a virtual device withone bi-directional RF port. Propertiesof this device are defined by both ele-ments—an antenna and a transpon-der, and the traditional antenna char-acteristics such as directivity orantenna gain become inappropriatefor a description of such a combinedstructure. Being a one-port RF devicefurther complicates its performanceassessment. Only two characteristicsof an antenna-transponder conglom-erate are practically available fortesting. They are antenna impedanceand an RF power level for which aReader indicates whether a transpon-der interrogation process (including acompletion of Write and Read com-mands) has been successful or not.With the aim of finding a proper wayfor characterizating an antenna-transponder combination, a set of newparameters was established andimplemented. Among them areSpatial Selectivity (SS) introducedearlier, RF Power Margin, RelativeActivation Power and transponderactivation interval. These parametersare measurable and capable ofdescribing the antenna-transponderproperties and performance such asthe transponder activation intervaland the system robustness.
Spatial Selectivity (as much asother parameters) is not an attributeof an antenna itself but rather a char-
acteristic of an antenna-transpondercombined structure. By definition, ahigh SS implies that for an activationof a targeted transponder, located inan encoding interval, an antennarequires much less power than maxi-mum power available from theReader. Upon assigning PTAT for min-imum RF power to activate atransponder in a targeted area andPTAA for power required for transpon-
der activation in adjacent areas, theSS parameter is obtained as
(10)
SS can also be defined by the mag-netic flux ratio using the value ΦA (4)and the flux through an adjacenttransponder ΦΤAD
SS LogPP
TAA
TAT
= [ ]10 dB

26 High Frequency Electronics
High Frequency Design
HF RFID
(11)
RF power margin Ψ is another important parameterdirectly related to a transponder activation interval or anoperational range. As was mentioned above, a one-portdevice allows a practical measurement of antenna mini-mum RF power when the Reader indicates it’s establish-ing a communication with the transponder for its differ-ent positions inside an activation interval. Obviously, aslower power is applied to an antenna, the shorter thisinterval is. By attenuating the maximum availableReader RF power P0 to the level PMIN when a specifiedactivation interval is achieved, the power margin Ψ canbe defined as
(12)
Applying the same power suppression method as wasused for (12), a Relative Activation Power Ξ can bedefined as the ratio between the Reader RF power P0 andthe power PA applied to an antenna that changes atransponder status from non-activated to activated (andvice versa) for any position inside an activation interval
(13)
The RF power margin (12) and the Relative ActivationPower (13) are two versatile parameters describing anantenna-transponder energy transfer regardless of theimpact their individual characteristics might have onenvironmental conditions.
High SS might be achieved by changing antenna prop-erties to decrease the magnetic field strength for adjacentareas and shrink an activation interval for a targetedtransponder. A properly designed antenna with high SSdoes not activate adjacent transponders even at maxi-mum available RF power. For applications working withmulti-dimensional transponders, a short activation inter-val is the most preferable. Ideally, this interval should beequal or less than the length of the shortest transpondertype engaged.
Likewise (13) the Relative Activation Flux Θ can beacquired as
Thus boundary points of an interaction interval can be
found using (13) when Ξ = 0. Practically, an interactioninterval is measured by registering two transponder posi-tions where the Reader starts and stops its communica-tions while supplying an antenna with maximum RFpower. The parameter Ξ inside an interaction interval forany transponder position is measured by attenuatingmaximum available RF power from the Reader up to thepoint where its communication with a transponder fails.An attenuation value expressed in dB corresponds to Ξ .
A collection of test results allows reconstruction of atransponder performance map for its activation interval.This map assures a detection of any inconsistencies aninterrogation region might have. Together with the mea-surement of RF power margin Ψ (12), Ξ test data enablesystem robustness analysis and antenna design verifica-tion. These actions are necessary because antennas andtransponders parameters have natural deviations fromtheir nominal values. Transponder activation flux, as anintegral characteristic of antenna-transponder coupling,is sensitive to these deviations and so is RelativeActivation Power. An antenna tuning frequency shift, RFport impedance mismatch, transponder resonant frequen-cy detuning and its excessive losses, and IC impedancevariations, just to name few, can occur in the manufac-turing process or be caused by the influence of operationalenvironmental conditions. High power margin compen-sates for an increase of TAMF in RFID systems and thusmakes an interrogation process more reliable.
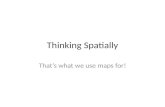
Introducing characterization parameters is instru-mental in an analysis of an antenna-transponder interac-tion and will be demonstrated first on an example of aconventional electrically small HF resonant rectangularloop antenna. This antenna for the conveyor scenario islocated in a parallel plane apart from a transponder butin very close proximity to it. The total magnetic fluxthrough transponder, which is contributed by a few spa-tially distributed antenna elements, changes along atransponder traveling above an antenna (Fig. 3) depend-ing on an antenna-transponder’s alignments at a giveninstant. When the transponder approaches the antenna itmakes use of the flux primarily from the element 3 (Fig.3a). The elements 1, 2, and 4 make an insignificant fluxcontribution. The flux via transponder attains first maxi-mum value when the transponder leading edge is rightabove the element 3 (Fig. 3b). While the center of thetransponder is approximately above the element 3 (Fig.3c), the antenna element 1 also supplies the transponderwith magnetic flux, which has a direction in opposition toflux from element 3, thus dropping the total magnetic fluxthrough the transponder to zero. As soon as the transpon-der becomes co-centered with the antenna coil (Fig. 3d) all4 elements supply the transponder with the unidirection-al magnetic flux. A further transponder movement caus-es the same interaction (Fig. 3e and 3f) as was described
Θ ΦΦ
= [ ]20Log T
A
dB
Ξ = [ ]10 0LogPPA
dB
Ψ = [ ]10 0LogP
PMIN
dB
SS Log A
TAD
= [ ]20ΦΦ
dB

28 High Frequency Electronics
High Frequency Design
HF RFID
above. It can be concluded that, during its travel, thetransponder encounters three distinct intervals 1, 2, and3 where its flux ΦT1 exceeds a Transponder ActivationMagnetic Flux ΦA (Fig. 3g). For the conveyor type of RFIDapplications these three intervals exactly cover the posi-tions of the targeted and two adjacent transponders. Inaccordance with eq. (11) the antenna is not spatiallyselective and it creates a collision situation. Analyzing thetotal flux through the transponder at different positions(Fig. 3g) one can suggest to attenuate RF power from theReader in order to reduce the magnetic flux (ΦT2) andachieve a single interrogation interval thus improving theantenna SS. While this suggestion is valid it works onlyunder one condition—an RFID system always using sin-gle form-factor transponders with zero parameter toler-ances. In reality an RFID system must be capable ofworking with different transponder dimensions.Moreover, the transponders from the same group havenormally distributed parameters around their specifiedvalues and the flux ΦA becomes a zone (Fig. 3g). Theexpansion of the line ΦA is related, for example, to thetransponder’s resonance frequency (7) and Q-factor (8)deviation effects. Decreasing an antenna’s magnetic fluxworsens flux margin and could cause a low encoding yieldof transponders because of a low RF power margin (12).
By following a good design rule of “3 dB” it can be con-cluded that in order to achieve high antenna perfor-mance, the SS for the intervals 1 and 2, and the powermargin Ψ for the interval 1 (Fig. 3g), should be equal to orexceed 3 dB.
Coming in Part 2Part 2 will continue the discussion with the topic
“Magnetic Flux Through the Transponder,” and will be
published in the next issue (March 2007).
References1. P. Albert, D. Ruffieux, O. Zhuk, “Understanding the
Role of NFC-Based RFID Devices in the Consumer/Mobile Market,” Emerging Wireless Technology/ASupplement to RF Design, pp. 2-4, August, 2005.
2. “Find a Vendor,” RFID Journal, 2006. www.rfidjour-nal.com/article/findvendor.
3. K. Finkenzeller, RFID Handbook–Fundamentalsand Applications in Contactless Smart Cards andIdentification, Second Edition, John Wiley & Sons, 2003.ISBN: 0-470-84402-7.
4. Y. Lee, “Antenna Circuit Design for RFIDApplications,” AN710, Microchip Technology Inc., 2003.ww1.microchip.com/downloads/en/appnotes/00710c.pdf.
5. “Tutorial Overview of Inductively Coupled RFIDSystems,” UPM Rafsec, May 2003. www.rafsec.com/rfidsystems.pdf.
6. “Tag-it HF-I Standard Transponder Inlays,”Reference Guide. Lit number: 11-09-21-062, TexasInstruments Incorporated, December 2005. www.ti.com/rfid/docs/manuals/refmanuals/HF-IStandardInlays-RefGuide.pdf.
7. “HF tags and inlays, standard products,” UPMRaflatac, 2006. www.rafsec.com/hf_availability.htm.
8. G. Zhong, C-K. Koh, “Exact Closed Form Formula forPartial Mutual Inductances of On-Chip Interconnects,”IEEE 20th International Conference on ComputerDesign, Freiburg, Germany, 2002. www.iccd-conference.org/proceedings/2002/17000428.pdf.
Author InformationBoris Y. Tsirline is the senior RFID research engineer
at Zebra Technologies Corporation in Vernon Hills, IL. Hereceived a BS and MS degrees in RF & MicrowaveEngineering from Moscow Aviation University, Russia in1973 and a PhD in EE from Moscow State University in1986. Before moving to the US in 1992, he served as aDirector of R&D at Automotive Electronics andEquipment Corp., Russia, developing military andaerospace electronic systems. He has been in theAutomatic Identification and Data Capture industrysince 1995; first as an RF Engineer involved in LF RFIDdesign of automotive immobilizers at TRW (AutomotiveElectronic Group) and then at Zebra TechnologiesCorporation since 1998. He managed the development ofZebra’s first HF RFID printer-encoder and establishedthe design methodology for HF and UHF spatially selec-tive antenna-transponder structures used throughout thecorporation divisions for RFID labels and cards printers.Dr. Tsirline holds three non-classified Russian and twoUS patents and has numerous pending patents for RFIDenhancements.
Figure 3 · Transponder interaction with a conventionalantenna.

16 High Frequency Electronics
High Frequency Design
HF RFID
Spatially Selective Antenna forVery Close Proximity HF RFIDApplications—Part 2
By Boris Y. Tsirline, PhDZebra Technologies Corporation
This article contin-ues the descriptionand analysis of a
novel HF antenna withhigh spatial selectivity.Its performance andfunctional characteristicsare analyzed for twoorthogonal alignments ofthe antenna and the
trans-ponder using a simplified mathematicalmodel.
Part 1 provided background on RFID tech-nology, identified the problem to be solved, andbegan a discussion of the interaction of theantenna and the transponder. Part 2 contin-ues the discussion, presenting an analysis ofcoupling mechanism between antenna andtransponder with respect to their orientationand relative movement.
Magnetic Flux through TransponderOne possible way to overcome multi-inter-
val interaction of an antenna-transponder andimprove antenna performance is to use afinite conductive element (or elementsgrouped together) for the magnetic flux gener-ation. The element can be a short straightwire carrying the time varying current. Withthe aim of achieving high spatial selectivity(SS), a straight short wire type HF antennawas proposed and implemented [9] for thesmart label encoding process in RFID Printer-Encoders. This antenna is based on the con-ventional resonant rectangular loop antennafabricated on PCB, where the traces providethe antenna conductors. Three sides of anantenna are covered by a flexible ferrite patchand one side is left open (Fig. 1). The ferrite
patch amplifies the magnetic flux generatedby the antenna and also concentrates themagnetic flux, increasing the coil inductanceand it’s Q-factor.
To analyze the performance of this originalantenna design and estimate its SS, a mathe-matical model was developed. This model, byestablishing a relationship between mechani-cal and electrical characteristics of an anten-na-transponder structure, enables a compari-son of the parameters for two orthogonalalignments.
As was declared above, Magnetic Fluxthrough Transponder ΦT is the most powerfulparameter used for an antenna-transponderquality and performance characterization. Itcan be found using Equation (9). In the gener-al case, this formula includes a spatial distri-bution of the non-uniform magnetic flux densi-ty generated by a current through a finitelength rod, with a diameter much smaller thenan antenna-transponder separation distance.
Part 2 of this article concludes the author’s
description and analysis ofRFID antennas that are
capable of communicatingwith a single transponder
(tags) while in close proximity to other tags
Figure 1 (detail) · HF antenna for item-levelRFID on conveyer.
From March 2007 High Frequency ElectronicsCopyright © 2007 Summit Technical Media, LLC

18 High Frequency Electronics
High Frequency Design
HF RFID
The the magnetic flux density at any field point nor-mal to a transponder plane is produced by a short wire oflength 2L carrying a current I along the (-x) direction(Fig. 4) in accordance with Biot-Savart Law, which is writ-ten for a general case [10] as
(14)
The equation (14) includes a normalization of a vectorB to the transponder plane by accepting an angle θ
Integration area of the transponder (Fig. 4) is limitedby its width ∆W and length ∆R. The total MFT ΦT (9) forthe interval Y ≥ 0 can be obtained then by summing overthe contributions from all transponder area differentialelements dA = dxdy. This is eq. (15)
Carrying out the integration (see Appendix) gives eq.(16), shown below:
Φ∆ ∆
TR
R R
W
W WNI rdry z
x L dx
x L y z
rdr
=+( )
+( )+( ) + +( )
−
+ +
∫ ∫µ
π0
20
2 2 20
24
yy z
x L dx
x L y zR
R R
W
W W
20
2 2 20
2+( )+( )
−( ) + +( )+ +
∫ ∫∆ ∆
Cosy
y zθ =
+20
2
Cosy
y zθ =
+20
2
Eq. (16)

20 High Frequency Electronics
High Frequency Design
HF RFID
Equation (16) was derived under an assumption thatthe magnetic flux created by a transponder itself has lit-tle effect on the magnetic field of the antenna.
The transponder magnetic flux for the interval where
(17)
was reconstructed from (16) representing the transpon-der by two parts (Fig. 5) having a total length ∆R with thelimits for the first one Yi–∆R by ∆W and the second one Yiby ∆W. By setting R=0 and making ∆Ri the variable in(16) the sum of the magnetic flux Φ1 and Φ2 on the inter-val (17) can be calculated considering their opposite direc-tions.
Equation (16) for the magnetic flux through atransponder includes and relates the antenna length, dis-tance to a transponder, its coil dimensions and the num-ber of turns, and also indirectly considers an RF poweravailable from the Reader by including the current I.
Antenna-Transponder InteractionThe proposed new antenna allows two alignments
regarding transponder movement direction. These twomovements named “Crosswise” and “Lateral” describe atransponder orientation in regards to an antenna plane.To facilitate an antenna-transponder interaction analysisand a performance comparison, the simple, but quite ade-quate for both cases, mathematical model described in(16) will be used.
To estimate an antenna SS for the transponderCrosswise movement (Fig. 4 and Fig. 6) the totaltransponder flux from an antenna carrying 80 mA cur-rent with 3 turns coil was calculated and plotted (Fig. 7)for the antenna location at Y = 0. There are four antennashaving a length that ranges from 10 to 40 mm analyzed.The distance (the geometry mean distance) between anantenna wire and a transponder plane is Z0 = 5 mm. Themagnetic flux was calculated for the transponder 40 by 40mm, which has 1 nWb the activation flux. For a 40 mmlength antenna, the flux curve changes sharply, and forthe second adjacent transponder the antenna has SS ofapproximately 8 dB, the interaction interval has two sep-
≤ ≤∆RY
20
Figure 6 · Transponder crosswise movement.Figure 7 · Total magnetic flux through transponder forcrosswise movement.
Figure 5 · Transponder crosswise movement—inter-section.
Figure 4 · Diagram showing the transponder magnet-ic flux integration setup.

22 High Frequency Electronics
High Frequency Design
HF RFID
arated parts. For the Second Adjacent Transponder (Fig.7) that is ~40 mm apart from the targeted transponder,SS of this antenna is negative (–8.5 dB). The total mag-netic flux trough the transponder exceeds its activationlevel thus presenting a collision situation. While the acti-vation interval for the targeted transponder is only 30mm, the antenna for such alignment can be used success-fully for a small item-level RFID only if the First AdjacentTransponder (Fig. 6 and 7) is moving out from a conveyorbelt after being encoded.
For a transponder Lateral movement and correspond-ing alignment shown in Fig. 4 and Fig. 8, the curve of thetotal flux trough the transponder is not as sharp as forthe previously considered alignment but instead there isthe single, relatively wide, interaction interval (Fig. 9).The same four antennas with the length ranging from 10to 40 mm were analyzed for the position co-centered at X= 0. The distance between the antenna wires and thetransponder edge (the geometry mean distance) is R = 5mm and the separation is Z0 = 0. The magnetic flux wascalculated for the similar transponder. For 40 mm anten-na length, its SS is ~4.5 dB for both adjacent transpon-ders and the activation interval for the targetedtransponder is ~65 mm. The flux or power margin exceeds9 dB, which makes an interrogation process very reliable.For the antennas centered at X = 0 with length decreas-ing from 40 to 30 and 20 mm the activation intervalsshrink from 65 mm to 55 and 38 mm accordingly, and therelative activation flux or power changes proportionallyfrom 9 dB to 7 and 4 dB. The antenna with 10 mm lengthis unable to activate the transponder. The biggest advan-tages of such alignment are the wide activation interval,high spatial selectivity and RF power margin.
Figure 10 depicts the total magnetic flux curves forfour transponders (Lateral movement) spaced 5 mmapart from the antenna having 3 wires, 200 mA currentand 30 mm length and centered at X = 0. With averagetransponder activation flux of approximately 2 nWb, the
antenna demonstrates high spatial selectivity for alltransponders in wide dimensional range (see Table 1).Maximum Relative Activation Flux was calculated forevery transponder co-centered with the antenna.
Antenna CircuitThe magnetic flux produced by an antenna will inter-
sect the wires in the transponder coil and create currentflow. The induced current flow in the transponder willhave its own magnetic flux, which will interact with themagnetic flux of an antenna. At some point, currentinduced in an antenna circuit by transponder flux canbecome comparable with an antenna current and, conse-quently, change its impedance and magnetic flux. Thus acurrent flowing in the antenna coil is defined by RF powerfrom the Reader and an impedance that depends on prop-erties of both magnetically coupled resonant circuits.
Figure 8 · Transponder lateral movement.
Figure 9 · Total magnetic flux through transponder forlateral movement.
Figure 10 · Total magnetic flux through four transpon-ders for lateral movement.

24 High Frequency Electronics
High Frequency Design
HF RFID
To find a complete description of the current in anantenna coil it is necessary to know the parameters thatcharacterize a relationship between the geometric struc-ture of an antenna-transponder and their electrical com-ponents. The first parameter called the mutual induc-tance M relates two nearby coils of magnetically coupleddevices. The mutual inductance depends on the geometri-cal arrangement of both circuits. The parameter M can beobtained from (16) and expressed as
(18)
Then impedance ZAT induced in the antenna circuitby the transponder circuit [11] can be written as
(19)
where RTS is equivalent resistive component of transpon-der impedance, and XT is equivalent reactive componentof transponder impedance.
If both antenna and transponder circuits are tuned atresonance with XT = 0, Equation (19) becomes
(20)
where RAT is a resistive component induced in an anten-na by a transponder.
Thus antenna impedance at the resonance consists ofits equivalent resistance RAL associated with circuit loss-es in series with resistance RAT (20).
The second parameter called the coupling coefficient Kis the ratio showing a grade of coupling between twodevices and defined as
(21)
where LA is the apparent inductance of an antenna coil,
and LT is the inductance of a transponder coil.The magnetic flux through a transponder coil is
increasing when it comes close to an antenna and so doesthe coupling coefficient. At some separation distance anantenna-transponder coupling attains critical level atwhich power transfer efficiency from antenna totransponder achieves its maximum and RAL becomesequal to RAT. Then the third parameter called the criticalcoupling coefficient Kc linking Q-factors of both circuitsfor this case
(22)
As required for the critical coupling, an apparentinductance LA of an antenna coil can be obtained by com-bining (18), (21) and (22)
In order to maintain the same transponder magneticflux for the critical coupling as for the loosely coupledcase, RF power from a Reader must be doubled andantenna impedance matched to 2RAL.
Matching an antenna combined impedance when thecritical coupling takes place for a transponder positionedat the center of an activation interval further increasesan antenna SS. Improved SS is achieved because thetransponder movement to any of two positions corre-sponding to the edges of the activation interval causes anantenna impedance mismatch. The impedance mismatchin turn decreases the power transfer efficiency and as aresult lowers the magnetic flux available for two adjacenttransponders. If a design goal is to enlarge an activationinterval then an adaptive impedance matching might beimplemented. The antenna impedance adaptive matchinguses adjustable matching components, which parameterschanges depending on an antenna coupling grade with atransponder to keep antenna port impedance equal to animpedance of RF power source.
L
IL
Q Q
AT
T
A T
= Φ2
KQ Qc
A T
= 1
KL LA T
= Μ
RfRAT
T
= ( ) [ ]2 2π Μohm
Zf R
R Xj
f XR XAT
TS
TS T
T
TS T
= ( )+
− ( )+
2 22
2 2
2
2 2
π πΜ Μ
Μ Φ= [ ]T
IH
Transponder SS for an “encoded” SS for a “following” Maximum Relative dimensions (mm) transponder (dB) transponder (dB) Activation Flux (dB)
23 × 38 15.4 12 6.3
45 × 45 14.2 8.9 8.4
34 × 65 17.4 15 9.7
45 × 76 16.8 14.7 10.6
Table 1 · Summary of SS and magnetic activation flux for four different transponder sizes.

The antenna coil practical designpresented here is a multi-interactiveprocess, but regardless of the type ofa fabrication technology, an apparentinductance can be measured and con-firmed after covering three sides of arectangular coil by the flexible ferritewith permeability in the range of 20to 40 [12, 13]. Utilization of ferritematerials with higher permeability islimited by the minimum value ofantenna resonating capacitive ele-ments, which should be no less than50 pF to prevent circuit detuning inthe operating environment.
ConclusionsA single element antenna allows
for precise identification of closelyspaced miniature objects with a widerange of transponder geometries.This spatially selective antenna, andthe mathematical model developedfor its analysis, are not restricted insize and may be successfully appliedto widespread RFID applicationsinvolving large-scale structures.
One limitation of a highly spatial-ly selective antenna is that, despiteits proximity to the transponder, theantenna requires the same RF poweras a conventional antenna for longrange RFID applications. This limita-tion applies only to HF transpondersactivated by the antenna’s magneticfield, whereas battery poweredtransponders require significantlyless power for the antenna. For con-veyor-type RFID applications incrowded environments with sur-rounding metal and plastic parts, themagnetic field becomes distorted.Such environments can increasepower losses, detune both the anten-na and the transponder, and requirehigher power for transponder activa-tion compared to open environments.Nonetheless, the antenna-transpon-der coupling was analyzed and aworking system implemented for theHF RFID printer-encoders using themathematical model described in thisarticle. Empirically obtained correc-tive coefficients for transponder acti-
vation power, power margin and rela-tive activation power have shownencouraging results.
A complete analytical model formagnetic flux analysis in crowdedenvironments, and antenna-transponder coupling may be furtherexplored using HF structure simula-tor software. This model should also
take into consideration the currentincrease in a transponder coil whenthe magnetic field exceeds transpon-der activation flux and the IC voltageregulator is engaged.
AcknowledgementsThe author would like to thank
Dr. Hohberger, C.P., Torchalski, K.,

26 High Frequency Electronics
High Frequency Design
HF RFID
and Schwan, M., at Zebra Technologies Corporation forhelpful and productive discussions regarding HF RFIDspatially selective antennas development and Gawelczyk,R., for his assistance in antennas fabrication and testing.
AppendixAn Appendix that includes the derivation of Equation
16 is included with the online version of this article atwww.highfrequencyelectronics.com.
References1. P. Albert, D. Ruffieux, O. Zhuk, “Understanding the
Role of NFC-Based RFID Devices in the Consumer/MobileMarket,” Emerging Wireless Technology/A Supplement toRF Design, pp. 2-4, August, 2005.
2. “Find a Vendor,” RFID Journal, 2006. http://www.rfidjournal.com/article/findvendor.
3. K. Finkenzeller, RFID Handbook-Fundamentalsand Applications in Contactless Smart Cards andIdentification, Second Edition, John Wiley & Sons, 2003.ISBN: 0-470-84402-7.
4. Y. Lee, “Antenna Circuit Design for RFIDApplications,” AN710, Microchip Technology Inc., 2003.http://ww1.microchip.com/downloads/en/appnotes/00710c.pdf.
5. “Tutorial Overview of Inductively Coupled RFIDSystems,” UPM Rafsec, May 2003. http://www.rafsec.com/rfidsystems.pdf.
6. “Tag-it HF-I Standard Transponder Inlays,”Reference Guide. Lit number: 11-09-21-062, TexasInstruments Incorporated, Dec. 2005. http://www.ti.com/rfid/docs/manuals/refmanuals/HF-IStandardInlays-RefGuide.pdf.
7. “HF tags and inlays, standard products,” UPMRaflatac, 2006. http://www.rafsec.com/hf_availability.htm.
8. G. Zhong, C-K. Koh, “Exact Closed Form Formula forPartial Mutual Inductances of On-Chip Interconnects,”IEEE 20th International Conference on Computer Design,Freiburg, Germany, 2002. http://www.iccd-conference.org/proceedings/2002/17000428.pdf.
9. B.Y. Tsirline, C.P. Hohberger, R. Gawelczyk, “System
and Method for Selective Communication with RFIDTransponders,” U.S. Patent 6,848,616, B2, February 2005.
10. M.I. Grivich, D.P. Jackson, “The magnetic field ofcurrent-carrying polygons: An application of vector fieldrotations,” American Association of Physics Teachers,American Journal of Physics, Vol. 68, No. 5, pp. 469-474,May 2000. http://physics.dickinson.edu/~dept_web/activi-ties/papers/polygonarticle.pdf.
11. D.A. Bell, Fundamentals of Electric Circuits/WithComputer Program Manual, 4th Edition, Prentice Hall,1988. ISBN: 0-13-336645-6.
12. “RFID Absorber Shielding,” FerriShield, Inc., 2006.http://www.ferrishield.com.13. “Flex-Suppressor,” NEC TOKIN America Inc.,
Vol.08, 2006. http://www.nec-tokin.com/english/product/pdf_dl/FLEX.pdf.
14. K. Gieck, R. Gieck, Engineering Formulas, 6th edi-tion, McGraw-Hill Inc., 1990. ISBN: 0-07-023455-8.
Author InformationBoris Y. Tsirline is the senior RFID research engineer
at Zebra Technologies Corporation in Vernon Hills, IL. Hereceived a BS and MS degrees in RF & MicrowaveEngineering from Moscow Aviation University, Russia in1973 and a PhD in EE from Moscow State University in1986. Before moving to the US in 1992, he served as aDirector of R&D at Automotive Electronics andEquipment Corp., Russia, developing military andaerospace electronic systems. He has been in theAutomatic Identification and Data Capture industrysince 1995; first as an RF Engineer involved in LF RFIDdesign of automotive immobilizers at TRW (AutomotiveElectronic Group) and then at Zebra TechnologiesCorporation since 1998. He managed the development ofZebra’s first HF RFID printer-encoder and establishedthe design methodology for HF and UHF spatially selec-tive antenna-transponder structures used throughout thecorporation divisions for RFID labels and cards printers.Dr. Tsirline holds three non-classified Russian and twoUS patents and has numerous pending patents for RFIDenhancements.
Information on the new High Frequency Electronics online edition:Each issue of High Frequency Electronics is now available online, appearing just like it does in printed form.
The online edition is in PDF format, with a typical 7 to 10MB file size that is readily downloadable via any high-speed Internet connection. Although the online edition is currently available to anyone, we will soon implementa subscription policy that allows online subscribers to obtain the issue well in advance of its public release.
We will maintain our technical article archives in the same manner we have done since the founding of themagazine. You can download, read and save interesting articles from the online edition, and you can also obtainpast articles individually from the archives. The individual articles from each online edition will appear in thearchives after the following month’s online edition has been published.
The new online edition can be found at: www.highfrequencyelectronics.com

2 High Frequency Electronics
High Frequency Design
HF RFID
Appendix
(1)
(2)
To do this integral we’ll use the following substitution: x + L = ρ and y2 + z02 = ε2
then dρ = dx and an integral from formula “i88” [14]
(3)
Integral (2) can be written as:
(4)
or equation (4) can be presented in a form of
(5)
substituting first component in (1)
(6)
To do integral (6) we’ll use the following substitution for the first component:
then
and
y z W W L2 20
2= − + + +( )⎡⎣λ ∆
λ2 20
2 2= + + + +( )⎡⎣
⎤⎦y z W W L∆
λ = + + + +( )⎡⎣
⎤⎦y z W W L2
02 2∆
y y z W W L
y z
y y z W L
y z
20
2 2
20
2
20
2 2
20
2
+ + + +( )⎡⎣
⎤⎦
+( ) −+ + +( )⎡⎣
⎤⎦
+( )⎛
⎝
∆⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟
+
∫ dyR
R R∆
= + + + +( )⎡⎣
⎤⎦ − + + +( )⎡
⎣⎤⎦y z W W L y z W L2
02 2 2
02 2∆
y z x L y z W W L y z W LW
W W2
02 2 2
02 2 2
02 2+( ) + +( ) = +( ) + + +( ) − +( ) + +( )
+∆∆
ρ
ρ ερ ρ ε
2 2
2 2
+( )= +∫ d
x L dx
x L y zW
W W +( )+( ) + +( )
+
∫ 2 20
2
∆
Φ∆ ∆
TR
R R
W
W WNI ydyy z
x L dx
x L y z
ydy=+( )
+( )+( ) + +( )
−+ +
∫ ∫µ
π0
20
2 2 20
24 yy z
x L dx
x L y zR
R R
W
W W
20
2 2 20
2+( )+( )
−( ) + +( )+ +
∫ ∫∆ ∆

March 2007 1
then
and use the following substitution for the second component:
then
and
then
Integral (6) can be written as:
substituting (W + ∆W + L)2 = ξ2 and (W + L)2 = a2
and
[formula “i61” 14, ]
Then two components of integral (6) can be rewritten as
(7)
and
(8)y z W LW L
LnW L y z W L
W L yR
R R2
02 2
20
2 2
22+ + +( )⎡⎣
⎤⎦ −
+( ) +( ) + + + +( )+( ) −
+∆
++ + +( )+
z W L R
R R
02 2
∆
y z W W LW W L
LnW W L y z W W
R
R R2
02 2
20
2
2+ + + +( )⎡⎣
⎤⎦ −
+ +( ) + +( ) + + + + ++∆
∆ ∆ ∆∆ LL
W W L y z W W L R
R R( )+ +( ) − + + + +( )
+2
20
2 2∆ ∆
∆
σσ
σ σ σσ
2
2 2 2−= − +
−∫ ad
aLn
aa
λλ ξ
λ λ λ ξ λξ λ
2
2 2 2−= − +
−∫ d Ln
λλ
λ σσ
σ2
2 2
2
2 2− + +( )−
− +( )
+ +
∫ ∫W W Ld
W Ld
R
R R
R
R R
∆
∆ ∆
dyz W L
d=− + +( )⎡⎣
⎤⎦
σ
σσ
20
2 2
y z W L= − + +( )⎡⎣
⎤⎦σ2
02 2
y z W L2 20
2 2= − + +( )⎡⎣
⎤⎦σ
σ2 20
2 2= + + +( )⎡⎣
⎤⎦y z W L
σ = + + +( )⎡⎣
⎤⎦y z W L2
02 2
dyz W W L
d=− + + +( )⎡⎣
⎤⎦
λ
λλ
20
2 2∆
y z W W L= − + + +( )⎡⎣
⎤⎦λ2
02 2∆

2 High Frequency Electronics
High Frequency Design
HF RFID
using (7) and (8) integral (6) is then
(9)
By repeating procedure above for:
and substituting a second component in (1)
where
and
we can compute
ν = + + −( )⎡⎣
⎤⎦y z W L2
02 2
γ = + + −( )⎡⎣
⎤⎦y z W L2
02 2
−− + −( )
+− −( )
+ +
∫ ∫γ
γγ ν
νν
2
2 2
2
2 2W W Ld
W Ld
R
R R
R
R R
∆
∆ ∆
−−( )
−( ) + +( )+
∫x L dx
x L y zW
W W
2 20
2
∆

March 2007 1
(10)
Adding (9) and (10), we will obtain a final result (Equation 16).