
Solucion Problemas v0409 Fuerza sobre el amortiguador Entradas: Fuerza ejercida entre ambas masas....
64
Capitulo 1 Nivel Básico 1.- (a) Tren de alta velocidad: Velocidad, consumo de combustible, eficiencia. (b) Pala Mecánica: Posición brazo, torque brazo, consumo de energía. (c) Estanques: Nivel estanques, flujo recirculación, flujo de salida. (d) Amortiguación automóvil: Posición vertical automóvil, fuerza sobre el resorte, fuerza sobre el amortiguador. (e) Generación solar: Angulo del panel respecto del sol, voltaje de salida, potencia de salida. (f) Estanque diluidor: Nivel estanque, concentración de fluido interno, flujo de salida. (g) Reductor de tensión: Voltaje de salida, corriente de entrada, potencia de salida. (h) Motor de cc de corriente continua: Torque eléctrico, velocidad carga, corriente de armadura. 2.- (a) Tren de alta velocidad: Velocidad, consumo de combustible, eficiencia, velocidad del viento, forma aerodinámica, cantidad de pasajeros, cantidad de combustible, pendiente del suelo, curva en la trayectoria, velocidad de giro eje del motor. (b) Pala Mecánica: Posición brazo, torque brazo, consumo de energía., velocidad del brazo, relieve del suelo, distancia, cantidad de mineral transportado, potencia máxima pala, voltaje de alimentación accionamientos, corriente entregada al sistema. (c) Estanques: Nivel estanques, flujo recirculación, flujo de salida, área estanques, área tubería, potencia bomba, velocidad bomba, aceleración de gravedad, presión atmosférica, flujo de entrada, volumen estanques. (d) Amortiguación automóvil: Posición vertical automóvil, fuerza sobre el resorte, fuerza sobre el amortiguador, posición del sistema de amortiguación, velocidad del sistema de amortiguación, velocidad vertical del automóvil, constante resorte, constante amortiguador, masa del automóvil, masa del sistema de amortiguación, distancia entre las masas en reposo, distancia entre las masas y el suelo en reposo, fuerza ejercida entre ambas masas, relieve del suelo. (e) Generación solar: Angulo del panel respecto del sol, voltaje de salida, potencia de salida, ángulo del sol, ángulo de los paneles auxiliares respecto del sol, tensión de entrada v c , tensiones paneles auxiliares, ángulo de los paneles auxiliares respecto al panel principal. (f) Estanque diluidor: Nivel estanque, concentración de fluido interno, flujo de salida, geometría del estanque, flujo de entrada, concentración flujo de entrada, flujo de agua, presión atmosférica, aceleración de gravedad, volumen estanque. (g) Reductor de tensión: Voltaje de salida, corriente de entrada, potencia de salida, valor resistencia, inductor y condensador, voltaje de entrada, tiempo de encendido-apagado del interruptor, corriente del inductor. (h) Motor de cc de corriente continua: Torque eléctrico, velocidad carga, corriente de armadura, constante elástica del eje mecánico, inercia de la carga mecánica, valor de las componentes eléctricas internas del motor, razón de vueltas caja de engranajes, velocidad eje del motor, torque eje del motor, voltaje de armadura, voltaje de campo, corriente de campo, toque de carga.
Transcript of Solucion Problemas v0409 Fuerza sobre el amortiguador Entradas: Fuerza ejercida entre ambas masas....

Capitulo 1 Nivel Básico
1.- (a) Tren de alta velocidad: Velocidad, consumo de combustible, eficiencia. (b) Pala Mecánica: Posición brazo, torque brazo, consumo de energía. (c) Estanques: Nivel estanques, flujo recirculación, flujo de salida. (d) Amortiguación automóvil: Posición vertical automóvil, fuerza sobre el resorte, fuerza sobre el amortiguador. (e) Generación solar: Angulo del panel respecto del sol, voltaje de salida, potencia de salida. (f) Estanque diluidor: Nivel estanque, concentración de fluido interno, flujo de salida. (g) Reductor de tensión: Voltaje de salida, corriente de entrada, potencia de salida. (h) Motor de cc de corriente continua: Torque eléctrico, velocidad carga, corriente de armadura. 2.- (a) Tren de alta velocidad: Velocidad, consumo de combustible, eficiencia, velocidad del viento, forma aerodinámica, cantidad de pasajeros, cantidad de combustible, pendiente del suelo, curva en la trayectoria, velocidad de giro eje del motor. (b) Pala Mecánica: Posición brazo, torque brazo, consumo de energía., velocidad del brazo, relieve del suelo, distancia, cantidad de mineral transportado, potencia máxima pala, voltaje de alimentación accionamientos, corriente entregada al sistema. (c) Estanques: Nivel estanques, flujo recirculación, flujo de salida, área estanques, área tubería, potencia bomba, velocidad bomba, aceleración de gravedad, presión atmosférica, flujo de entrada, volumen estanques. (d) Amortiguación automóvil: Posición vertical automóvil, fuerza sobre el resorte, fuerza sobre el amortiguador, posición del sistema de amortiguación, velocidad del sistema de amortiguación, velocidad vertical del automóvil, constante resorte, constante amortiguador, masa del automóvil, masa del sistema de amortiguación, distancia entre las masas en reposo, distancia entre las masas y el suelo en reposo, fuerza ejercida entre ambas masas, relieve del suelo. (e) Generación solar: Angulo del panel respecto del sol, voltaje de salida, potencia de salida, ángulo del sol, ángulo de los paneles auxiliares respecto del sol, tensión de entrada vc, tensiones paneles auxiliares, ángulo de los paneles auxiliares respecto al panel principal. (f) Estanque diluidor: Nivel estanque, concentración de fluido interno, flujo de salida, geometría del estanque, flujo de entrada, concentración flujo de entrada, flujo de agua, presión atmosférica, aceleración de gravedad, volumen estanque. (g) Reductor de tensión: Voltaje de salida, corriente de entrada, potencia de salida, valor resistencia, inductor y condensador, voltaje de entrada, tiempo de encendido-apagado del interruptor, corriente del inductor. (h) Motor de cc de corriente continua: Torque eléctrico, velocidad carga, corriente de armadura, constante elástica del eje mecánico, inercia de la carga mecánica, valor de las componentes eléctricas internas del motor, razón de vueltas caja de engranajes, velocidad eje del motor, torque eje del motor, voltaje de armadura, voltaje de campo, corriente de campo, toque de carga.

3.- (a) Tren de alta velocidad: - Velocidad Variables de estado: Consumo de combustible, eficiencia. Salidas: Velocidad. Entradas: Velocidad de giro eje del motor. Perturbaciones: Velocidad del viento, cantidad de pasajeros, cantidad de combustible, pendiente del suelo, curva en la trayectoria. Parámetros: Forma aerodinámica. - Consumo de combustible Variables de estado: Velocidad, eficiencia. Salidas: Consumo de combustible. Entradas: Velocidad de giro eje del motor. Perturbaciones: Velocidad del viento, cantidad de pasajeros, cantidad de combustible, pendiente del suelo, curva en la trayectoria. Parámetros: Forma aerodinámica. - Eficiencia Variables de estado: Velocidad, consumo de combustible. Salidas: Eficiencia. Entradas: Velocidad de giro eje del motor. Perturbaciones: Velocidad del viento, cantidad de pasajeros, cantidad de combustible, pendiente del suelo, curva en la trayectoria. Parámetros: Forma aerodinámica. (b) Pala mecánica: - Posición brazo Variables de estado: Torque brazo, consumo de energía, velocidad del brazo, corriente entregada al sistema. Salidas: Posición brazo. Entradas: Voltaje de alimentación accionamientos. Perturbaciones: Relieve del suelo, cantidad de mineral transportado. Parámetros: Potencia máxima pala. - Torque brazo Variables de estado: Posición brazo, consumo de energía, velocidad del brazo, corriente entregada al sistema. Salidas: Torque brazo. Entradas: Voltaje de alimentación accionamientos. Perturbaciones: Relieve del suelo, cantidad de mineral transportado. Parámetros: Potencia máxima pala. - Consumo de energía Variables de estado: Posición brazo, torque brazo, velocidad del brazo, corriente entregada al sistema. Salidas: Consumo de energía. Entradas: Voltaje de alimentación accionamientos. Perturbaciones: Relieve del suelo, cantidad de mineral transportado. Parámetros: Potencia máxima pala.

(c) Estanques: - Nivel estanques Variables de estado: Flujo recirculación, flujo de salida, volumen estanques. Salidas: Nivel estanques. Entradas: Velocidad bomba. Perturbaciones: Flujo de entrada. Parámetros: Área estanques, área tubería, potencia bomba, aceleración de gravedad, presión atmosférica. - Flujo recirculación Variables de estado: Nivel estanques, flujo de salida, volumen estanques. Salidas: Flujo recirculación. Entradas: Velocidad bomba. Perturbaciones: Flujo de entrada. Parámetros: Área estanques, área tubería, potencia bomba, aceleración de gravedad, presión atmosférica. - Flujo de salida. Variables de estado: Nivel estanques, flujo recirculación, volumen estanques. Salidas: Flujo de salida. Entradas: Velocidad bomba. Perturbaciones: Flujo de entrada. Parámetros: Área estanques, área tubería, potencia bomba, aceleración de gravedad, presión atmosférica. (d) Amortiguación automóvil: - Posición vertical automóvil Variables de estado: Fuerza sobre el resorte, fuerza sobre el amortiguador, posición del sistema de amortiguación, velocidad del sistema de amortiguación, velocidad vertical del automóvil. Salidas: Posición vertical automóvil. Entradas: Fuerza ejercida entre ambas masas. Perturbaciones: Relieve del suelo. Parámetros: Constante resorte, constante amortiguador, masa del automóvil, masa del sistema de amortiguación, distancia entre las masas en reposo, distancia entre las masas y el suelo en reposo. - Fuerza sobre el resorte Variables de estado: Posición vertical automóvil, fuerza sobre el amortiguador, posición del sistema de amortiguación, velocidad del sistema de amortiguación, velocidad vertical del automóvil. Salidas: Fuerza sobre el resorte. Entradas: Fuerza ejercida entre ambas masas. Perturbaciones: Relieve del suelo. Parámetros: Constante resorte, constante amortiguador, masa del automóvil, masa del sistema de amortiguación, distancia entre las masas en reposo, distancia entre las masas y el suelo en reposo. - Fuerza sobre el amortiguador Variables de estado: Posición vertical automóvil, fuerza sobre el resorte, posición del sistema de amortiguación, velocidad del sistema de amortiguación, velocidad vertical del automóvil.

Salidas: Fuerza sobre el amortiguador Entradas: Fuerza ejercida entre ambas masas. Perturbaciones: Relieve del suelo. Parámetros: Constante resorte, constante amortiguador, masa del automóvil, masa del sistema de amortiguación, distancia entre las masas en reposo, distancia entre las masas y el suelo en reposo. (e) Generación solar: - Angulo del panel respecto del sol Variables de estado: Voltaje de salida, potencia de salida, ángulo de los paneles auxiliares respecto del sol, tensiones paneles auxiliares. Salidas: Ángulo del panel respecto del sol. Entradas: Tensión de entrada vc. Perturbaciones: Ángulo del sol. Parámetros: Ángulo de los paneles auxiliares respecto al panel principal. - Voltaje de salida Variables de estado: Ángulo del panel respecto del sol, potencia de salida, ángulo de los paneles auxiliares respecto del sol, tensiones paneles auxiliares. Salidas: Voltaje de salida. Entradas: Tensión de entrada vc. Perturbaciones: Ángulo del sol. Parámetros: Ángulo de los paneles auxiliares respecto al panel principal. - Potencia de salida Variables de estado: Ángulo del panel respecto del sol, voltaje de salida, ángulo de los paneles auxiliares respecto del sol, tensiones paneles auxiliares. Salidas: Potencia de salida. Entradas: Tensión de entrada vc. Perturbaciones: Ángulo del sol. Parámetros: Ángulo de los paneles auxiliares respecto al panel principal. (f) Estanque diluidor: - Nivel estanque Variables de estado: Concentración de fluido interno, flujo de salida, volumen estanque. Salidas: Nivel estanque. Entradas: Flujo de entrada. Perturbaciones: Flujo de agua, concentración flujo de entrada Parámetros: Presión atmosférica, aceleración de gravedad, geometría del estanque. - Concentración de fluido interno Variables de estado: Nivel estanque, flujo de salida, volumen estanque. Salidas: Concentración de fluido interno. Entradas: Flujo de entrada. Perturbaciones: Flujo de agua, concentración flujo de entrada Parámetros: Presión atmosférica, aceleración de gravedad, geometría del estanque. - Flujo de salida Variables de estado: Nivel estanque, concentración de fluido interno, volumen estanque. Salidas: Flujo de salida. Entradas: Flujo de entrada.

Perturbaciones: Flujo de agua, concentración flujo de entrada Parámetros: Presión atmosférica, aceleración de gravedad, geometría del estanque. (g) Reductor de tensión: - Voltaje de salida Variables de estado: Corriente de entrada, potencia de salida, corriente del inductor. Salidas: Voltaje de salida. Entradas: Tiempo de encendido-apagado del interruptor. Perturbaciones: Voltaje de entrada. Parámetros: Valor resistencia, inductor y condensador. - Corriente de entrada Variables de estado: Voltaje de salida, potencia de salida, corriente del inductor. Salidas: Corriente de entrada. Entradas: Tiempo de encendido-apagado del interruptor. Perturbaciones: Voltaje de entrada. Parámetros: Valor resistencia, inductor y condensador. - Potencia de salida Variables de estado: Voltaje de salida, corriente de entrada, corriente del inductor. Salidas: Potencia de salida. Entradas: Tiempo de encendido-apagado del interruptor. Perturbaciones: Voltaje de entrada. Parámetros: Valor resistencia, inductor y condensador. (h) Motor de cc de corriente continua: - Torque eléctrico Variables de estado: Velocidad carga, corriente de armadura, corriente de campo, velocidad eje del motor, torque eje del motor. Salidas: Torque eléctrico. Entradas: Voltaje de armadura, voltaje de campo. Perturbaciones: Toque de carga. Parámetros: Constante elástica del eje mecánico, inercia de la carga mecánica, valor de las componentes eléctricas internas del motor, razón de vueltas caja de engranajes. - Velocidad carga Variables de estado: Torque eléctrico, corriente de armadura, corriente de campo, velocidad eje del motor, torque eje del motor. Salidas: Velocidad carga. Entradas: Voltaje de armadura, voltaje de campo. Perturbaciones: Toque de carga. Parámetros: Constante elástica del eje mecánico, inercia de la carga mecánica, valor de las componentes eléctricas internas del motor, razón de vueltas caja de engranajes. - Corriente de armadura Variables de estado: Torque eléctrico, velocidad carga, corriente de campo, velocidad eje del motor, torque eje del motor. Salidas: Corriente de armadura. Entradas: Voltaje de armadura, voltaje de campo. Perturbaciones: Toque de carga.

Parámetros: Constante elástica del eje mecánico, inercia de la carga mecánica, valor de las componentes eléctricas internas del motor, razón de vueltas caja de engranajes. 4.- (a) Tren de alta velocidad: no-lineal, continuo, dinámico, causal, variante, distribuido. (b) Pala Mecánica: no-lineal, continuo, dinámico, causal, variante, distribuido. (c) Estanques: no-lineal, continuo, dinámico, causal, invariante, concentrado. (d) Amortiguación automóvil: lineal, continuo, dinámico, causal, invariante, concentrado. (e) Generación solar: lineal, continuo, dinámico, causal, invariante, concentrado. (f) Estanque diluidor: no-lineal, continuo, dinámico, causal, invariante, concentrado. (g) Reductor de tensión: no-lineal, continuo, dinámico, causal, invariante, concentrado. (h) Motor de cc de corriente continua: lineal, continuo, dinámico, causal, invariante, concentrado.
Nivel Intermedio 1.- La derivada de los parámetros del sistema respecto del tiempo es distinta de cero. 2.- Las ecuaciones que modelan el sistema son ecuaciones diferenciales parciales. 3.- Cuando se realiza la misma prueba sobre un sistema en distintos instantes de tiempo y se obtienen los mismos resultados, se dice que el sistema es invariante. En caso contrario el sistema es variante. 4.- Cuando se realiza la misma prueba sobre un sistema en distintas posiciones espaciales y se obtienen los mismos resultados, se dice que el sistema es concentrado. En caso contrario el sistema es distribuido.
Nivel Avanzado 1.- - El flujo de calor en un cuerpo de material homogéneo está gobernado por la ecuación:
2 2 22
2 2 2
u u u uct x y z
⎛ ⎞∂ ∂ ∂ ∂= + +⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
- La ley de Faraday establece que el voltaje inducido en un circuito cerrado es directamente proporcional a la rapidez con que cambia en el tiempo el flujo magnético que atraviesa una superficie cualquiera con el circuito como borde:. Su forma diferencial es:
BEt
∂∇× = −
∂
- La ley de Ampere generalizada relaciona un campo magnético estático con la causa que la produce, es decir, una corriente eléctrica estacionaria. Su forma diferencial es:
DH Jt
∂∇× = +
∂
- La ecuación de la onda en tres dimensiones puede ser descrita por la siguiente ecuación:

( )2 2 2 2
22 2 2 2
u u u uc ut x y z
⎛ ⎞∂ ∂ ∂ ∂= + +⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
- En dinámica de fluidos, las ecuaciones de Euler son las que describen el movimiento de un fluido compresible no viscoso. La expresión diferencial de estas ecuaciones es la siguiente:
( )
( )
( )( )
0
0
0
t
pt
E E pt
ρ ρ
ρ ρ
∂+∇ ⋅ =
∂∂
+∇ ⋅ +∇ =∂∂
+∇ ⋅ + =∂
u
u u u
u
2.- - Considere el siguiente juego de azar: Cada vez se apuesta $1000; si se gana se recibe el doble y si se pierde no se recibe nada. La probabilidad de ganar $1000 es p. La probabilidad P(k) de perder todo el dinero al cabo de N juegos se puede modelar con la siguiente ecuación:
1 1( 2) ( 1) ( ) 0pP k P k P kp p
−+ − + + =
- La ecuación logística es un modelo simple de población para una especie que no tenga depredadores, pero sí un suministro de alimentos limitado. Viene dado por la siguiente ecuación:
( ) ( ) ( )( )1 1x k rx k x k+ = − donde r es un parámetro varía entre 0 y 4, que representa el suministro de alimento. El valor inicial de x tiene que encontrarse entre 0 y 1. - Un modelo clásico y simple en economía para el ingreso nacional y(k) para el año k, se describe en términos de los gastos de los consumidores c(k), de la inversión privada i(k) y los gastos del gobierno g(k) de acuerdo a la expresión:
( ) ( ) ( ) ( )y k c k i k g k= + + Estas cantidades se interrelacionan según las siguientes suposiciones. Primero, el gasto de los consumidores en el año k+1 es proporcional al ingreso nacional del año k.
( ) ( )1c k y kα+ = Segundo, la inversión privada en el año k +1 es proporcional al aumento en los gastos de los consumidores del año k al año k+1.
( ) ( ) ( )1 1i k c k c kβ+ = + −⎡ ⎤⎣ ⎦ De estas suposiciones se pueden escribir dos ecuaciones de diferencias:
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
1
1
c k c k i k g k
i k c k i k g k
α α α
βα β βα βα
+ = + +
+ = − + +
- La aproximación numérica del modelo de un sistema continuo lleva directamente a un modelo discreto. La forma de obtener el modelo equivalente depende de la complejidad de la aproximación escogida para las derivadas de las señales continuas y si la secuencia de

evaluación de los tiempos esta uniformemente espaciada. Considere el siguiente sistema continuo ( ) ( ) ( ) ( ) ( )z t F t z t G t v t= + y una secuencia de tiempos t0, t1, …. Asumiendo la
aproximación más simple de ( )z t en cada tk, se tiene:
( ) ( ) ( )1
1
k kk
k k
z t z tz t
t t+
+
−≈
−
Reemplazando esta aproximación en el sistema original se llega a: ( ) ( ) ( ) ( ) ( ) ( )1
1
k kk k k k
k k
z t z tF t z t G t v t
t t+
+
−≈ +
−
Reordenando esta última expresión se tiene: ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 11k k k k k k k k kz t t t F t z t t t G t v t+ + += + − + −⎡ ⎤⎣ ⎦
- En el procesamiento de señales, un filtro peineta se produce al sumarle a la señal original una versión retrasada en el tiempo de sí misma, causando así interferencia constructiva y destructiva. La estructura general de un filtro peineta se puede describir por la siguiente ecuación recurrente:
( ) ( ) ( )y k x k x k Nα= + − donde N es el tamaño del retraso (medido en muestras), y α es un factor de escalamiento aplicado a la señal retrasada. 3.- Sistema de parámetros distribuidos. 4.- Sistema variante en el tiempo.

Capitulo 2 Nivel Básico
1.- (a) (b) (c)
-5 0 5 100
2
4
6
-5 0 5 100
1
2
3
4
5
-5 0 50
0.5
1
1.5
2
(d) (e) (f)
-0.02 0 0.02 0.04-1
-0.5
0
0.5
1
-0.02 0 0.02 0.04-1
-0.5
0
0.5
1
-0.02 0 0.02 0.040
0.2
0.4
0.6
0.8
1
(g) (h) (i)
-2 -1 0 1 20
1
2
3
4
5
-2 0 20
0.2
0.4
0.6
0.8
1
-1 -0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
(j) (k) (l)
0 1 2 30
0.5
1
1.5
2
2.5x 10-9
0 1 2 30
0.2
0.4
0.6
0.8
1
-0.5 0 0.5 1-0.4
-0.3
-0.2
-0.1
0
0.1
(m) (n)

-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-0.02 0 0.02 0.04-0.04
-0.03
-0.02
-0.01
0
0.01
2.- (a) (b) (c)
-5 0 5 100
2
4
6
-5 0 5 100
0.2
0.4
0.6
0.8
1
-5 0 5 100
1
2
3
(d) (e) (f)
-0.02 0 0.02 0.040
0.5
1
1.5
2
-0.02 0 0.02 0.04-10
-5
0
5
10
-0.02 0 0.02 0.04-1
-0.5
0
0.5
1
(g) (h)
-5 0 5-1
-0.5
0
0.5
1
-5 0 50
0.2
0.4
0.6
0.8
1
3.- (a) Ninguna. (b) Ninguna. (c) Ninguna. (d) Par. (e) Ninguna. (f) Ninguna. (g) Ninguna. (h) Impar.

4.- (a)
( ) ( ) ( ) ( ) ( ) ( ) ( )5 5 5 52p
kT kT T kT T kT kT T kT Tf kT
+ − − + − + − + − +=
u u r u u r
( ) ( ) ( ) ( ) ( ) ( ) ( )5 5 5 52i
kT kT T kT T kT kT T kT Tf kT
+ − − − − − − + − +=
u u r u u r
(b)
( ) ( ) ( ) ( ) ( )5 52p
kT kT T kT kT Tf kT
− + − + + − +=
u u u u
( ) ( ) ( ) ( ) ( )5 52i
kT kT T kT kT Tf kT
− + − − − − +=
u u u u
(c) ( ) ( ) ( ) ( )δpf kT kT kT kT= + + −u u
( ) ( ) ( )if kT kT kT= − −u u (d)
( ) ( )cos 2 50 1pf kT kTπ= +
( ) 0if kT = (e)
( ) ( ) ( ) ( ) ( )5sin 2 50 6 5sin 2 50 6pf kT kT kT kT kTπ π π π= − − + −u u
( ) ( ) ( ) ( ) ( )5sin 2 50 6 5sin 2 50 6if kT kT kT kT kTπ π π π= − + + −u u (f)
( ) ( ) ( ) ( )( )3sin 2 50
2p
kTf kT kT kT
π= − −u u
( ) ( ) ( ) ( )( )3sin 2 50
2i
kTf kT kT kT
π= + −u u
(g)
( )( ) ( )
- -
2
k k
l lp
lT lTf kT
−
= ∞ = ∞
+=∏ ∏u u
( )( ) ( )
- -
2
k k
l li
lT lTf kT
−
= ∞ = ∞
−=∏ ∏u u
(h) ( ) 0pf kT =
( ) ( ) 0 otro i
kT T T kT Tf kT
k⎧ + − < <
= ⎨⎩
r

5.- (a) Sí, [ ]20T ms= .
(b) Sí, [ ]20T ms= . (c) No. (d) Sí, [ ]10T ms= .
(e) Sí, [ ]20T ms= .
(f) Sí, [ ]20T ms= .
(g) Sí, [ ]20T ms= .
(h) Sí, [ ]20T ms= . (i) No. (j) Sí, [ ]20T ms= . 6.-
(a) *50NkT
=
(b) 2*50
NkT
π=
(c) *50NkT
=
(d) *100
NkT
=
(e) No es periódica. (f) No es periódica. (g) * 2k = (h) * 20k = (i) No es periódica. (j) [ ]20T ms= 7.- (a) (a-a) ( ) ( ) ( ) ( )10 10 5 5 2g t t t t= + − − +u u r
(a-b) ( ) ( ) ( ) ( )10 10 5 5 2g t t t t= − + − − +u u r
-5 0 5 100
20
40
60
80
-5 0 5 100
20
40
60

(a-c) ( ) ( ) ( ) ( )10 10 10 2g t t t tδ= + + − +u u
(a-d) ( ) ( )10sin 2 50 2g t tπ= +
-5 0 5
5
10
15
20
-0.02 0 0.02 0.04-10
-5
0
5
10
15
(a-e) ( ) ( ) ( )10sin 2 50 6 2g t t tπ π= − +u
(a-f) ( ) ( ) ( )210sin 2 50 2g t t tπ= +u
-0.02 0 0.02 0.04-10
-5
0
5
10
15
-0.02 0 0.02 0.042
4
6
8
10
12
(a-g) ( ) ( ) ( )10 3 10 3 2 2g t t t= + − +u r
(a-h)
( ) ( )10 1 2 1 12 otro
t tg t
t⎧ + + − < <
= ⎨⎩
u
-2 -1 0 1 20
20
40
60
-2 0 22
4
6
8
10
12
(a-i) ( ) ( )1010 2tg t e t−= +u
(a-j) ( ) ( )1010 2 2tg t e t−= − +u
-1 -0.5 0 0.5 12
4
6
8
10
12
0 1 2 32
2
2
2
2
2

(a-k) ( ) ( ) ( )10 210 2 2tg t e t− −= − +u
(a-l) ( ) ( ) ( )10 1010 2j tg t e t− += +u
0 1 2 32
4
6
8
10
12
0 5 10 15-4
-3
-2
-1
0
1
(a-m) ( ) ( )1010 2j tg t e t−= +u
(a-n) ( ) ( ) ( )10 1010 2j tg t e t− += +r
-10 0 10 20-10
-5
0
5
10
1.8 2 2.2 2.4 2.6-0.4
-0.3
-0.2
-0.1
0
0.1
(b) (b-a) ( ) ( ) ( ) ( )10 10 5 5 20g t t t t= + − − +u u r
(b-b) ( ) ( ) ( ) ( )10 10 5 5 20g t t t t= − + − − +u u r
-5 0 5 1020
40
60
80
-5 0 5 1020
30
40
50
60
70
(b-c) ( ) ( ) ( ) ( )10 10 10 20g t t t tδ= + + − +u u
(b-d) ( ) ( )10sin 2 50 20g t tπ= +
-5 0 520
25
30
35
40
-0.02 0 0.02 0.0410
15
20
25
30

(b-e) ( ) ( ) ( )10sin 2 50 6 20g t t tπ π= − +u
(b-f) ( ) ( ) ( )210sin 2 50 20g t t tπ= +u
-0.02 0 0.02 0.0410
15
20
25
30
-0.02 0 0.02 0.0420
22
24
26
28
30
(b-g) ( ) ( ) ( )10 3 10 3 2 20g t t t= + − +u r
(b-h)
( ) ( )10 1 20 1 120 otro
t tg t
t⎧ + + − < <
= ⎨⎩
u
-2 -1 0 1 220
30
40
50
60
70
-2 0 220
22
24
26
28
30
(b-i) ( ) ( )1010 20tg t e t−= +u
(b-j) ( ) ( )1010 2 20tg t e t−= − +u
-1 -0.5 0 0.5 120
22
24
26
28
30
0 1 2 320
20
20
20
20
20
(b-k) ( ) ( ) ( )10 210 2 20tg t e t− −= − +u
(b-l) ( ) ( ) ( )10 1010 20j tg t e t− += +u
0 1 2 320
22
24
26
28
30
15 20 25 30-4
-3
-2
-1
0
1
(b-m) ( ) ( )1010 20j tg t e t−= +u
(b-n) ( ) ( ) ( )10 1010 20j tg t e t− += +r
10 15 20 25 30-10
-5
0
5
10
19.8 20 20.2 20.4 20.6-0.4
-0.3
-0.2
-0.1
0
0.1
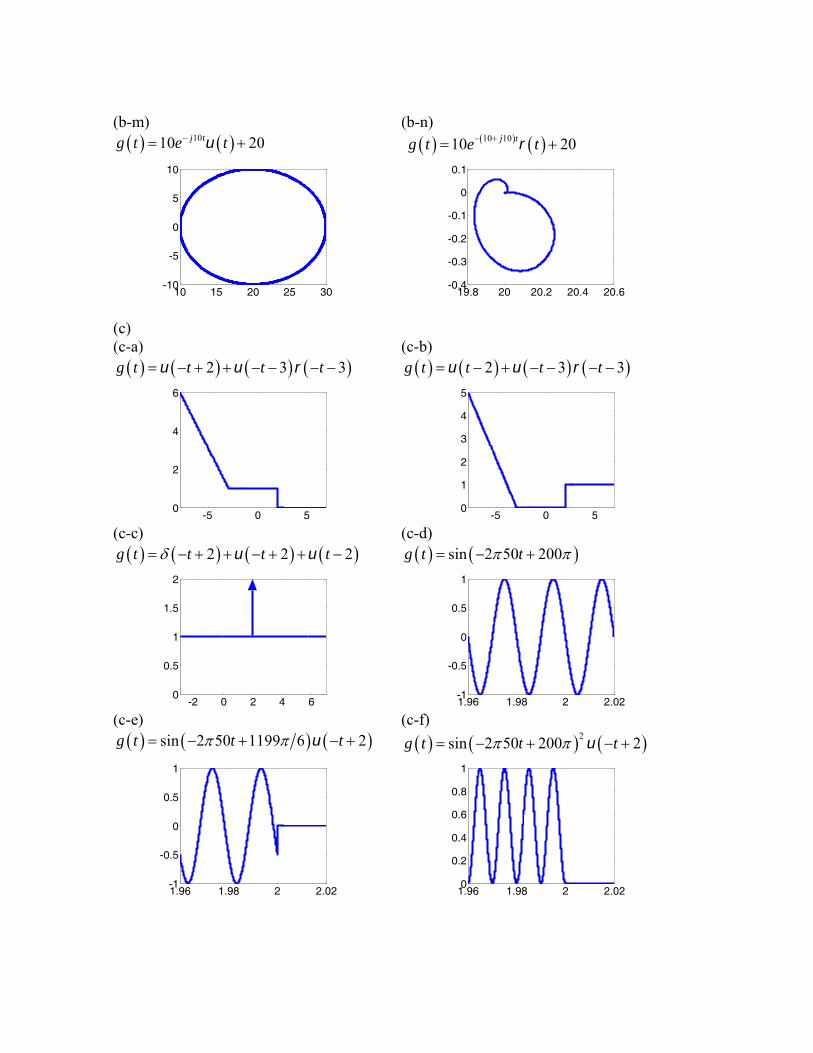
(c) (c-a) ( ) ( ) ( ) ( )2 3 3g t t t t= − + + − − − −u u r
(c-b) ( ) ( ) ( ) ( )2 3 3g t t t t= − + − − − −u u r
-5 0 50
2
4
6
-5 0 50
1
2
3
4
5
(c-c) ( ) ( ) ( ) ( )2 2 2g t t t tδ= − + + − + + −u u
(c-d) ( ) ( )sin 2 50 200g t tπ π= − +
-2 0 2 4 60
0.5
1
1.5
2
1.96 1.98 2 2.02-1
-0.5
0
0.5
1
(c-e) ( ) ( ) ( )sin 2 50 1199 6 2g t t tπ π= − + − +u
(c-f) ( ) ( ) ( )2sin 2 50 200 2g t t tπ π= − + − +u
1.96 1.98 2 2.02-1
-0.5
0
0.5
1
1.96 1.98 2 2.020
0.2
0.4
0.6
0.8
1

(c-g) ( ) ( ) ( )3 6 3 4g t t t= − + + − +u r
(c-h)
( ) ( )3 1 30 otro
t tg t
t⎧ − + < <
= ⎨⎩
u
0 1 2 3 40
1
2
3
4
5
0 2 40
0.2
0.4
0.6
0.8
1
(c-i) ( ) ( )10 20 2tg t e t−= − +u
(c-j) ( ) ( )10 20tg t e t−= −u
1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
-1 0 1 20
0.5
1
1.5
2
2.5x 10-9
(c-k) ( ) ( )10tg t e t= −u
(c-l) ( ) ( ) ( )10 10 20 20 2j t jg t e t+ − += − +u
-1 0 1 20
0.2
0.4
0.6
0.8
1
-0.5 0 0.5 1-0.4
-0.3
-0.2
-0.1
0
0.1
(c-m) ( ) ( ) ( )10 20 2j tg t e t−= − +u
(c-n) ( ) ( ) ( )10 10 20 20 2j t jg t e t+ − += − +r
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-0.02 0 0.02 0.04-0.04
-0.03
-0.02
-0.01
0
0.01

(d) (d-a) ( ) ( ) ( ) ( )2 2 5 2 5g t t t t= + − −u u r
(d-b) ( ) ( ) ( ) ( )2 2 5 2 5g t t t t= − + − −u u r
-10 0 10 200
2
4
6
-10 0 10 200
1
2
3
4
5
(d-c) ( ) ( ) ( ) ( )2 2 2g t t t tδ= + + −u u
(d-d) ( ) ( )sin 2 25g t tπ=
-5 0 50
0.5
1
1.5
2
-0.04-0.02 0 0.02 0.04 0.06-1
-0.5
0
0.5
1
(d-e) ( ) ( ) ( )sin 2 25 6 2g t t tπ π= − u
(d-f) ( ) ( ) ( )2sin 2 25 2g t t tπ= u
-0.04-0.02 0 0.02 0.04 0.06-1
-0.5
0
0.5
1
-0.04-0.02 0 0.02 0.04 0.060
0.2
0.4
0.6
0.8
1
(d-g) ( ) ( ) ( )3 3 22 2g t t t= + −u r
(d-h)
( ) ( )2 1 2 20 otro t t
g tt
⎧ + − < <= ⎨⎩
u
-4 -2 0 2 40
1
2
3
4
5
-5 0 50
0.2
0.4
0.6
0.8
1

(d-i) ( ) ( )5 2tg t e t−= u
(d-j) ( ) ( )5 2 2tg t e t−= −u
-2 -1 0 1 20
0.2
0.4
0.6
0.8
1
0 2 4 60
0.5
1
1.5
2
2.5x 10-9
(d-k) ( ) ( ) ( )5 4 2 2tg t e t− −= −u
(d-l) ( ) ( ) ( )5 5 2j tg t e t− += u
0 2 4 60
0.2
0.4
0.6
0.8
1
-0.5 0 0.5 1-0.4
-0.3
-0.2
-0.1
0
0.1
(d-m) ( ) ( )5 2j tg t e t−= u
(d-n) ( ) ( ) ( )5 5 2j tg t e t− += r
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-0.02 0 0.02 0.04-0.04
-0.03
-0.02
-0.01
0
0.01
(e) (e-a) ( ) ( ) ( ) ( )2 2 2 3 2 3g t t t t= − + + − − − −u u r
(e-b) ( ) ( ) ( ) ( )2 2 2 3 2 3g t t t t= − + − − − −u u r
-10 0 100
2
4
6
-10 0 100
1
2
3
4
5

(e-c) ( ) ( ) ( ) ( )2 2 2 2 2 2g t t t tδ= − + + − + + −u u
(e-d) ( ) ( )sin 2 25 200g t tπ π= − +
-5 0 5 100
0.5
1
1.5
2
3.92 3.94 3.96 3.98 4 4.02 4.04-1
-0.5
0
0.5
1
(e-e) ( ) ( ) ( )sin 2 25 1199 6 2 2g t t tπ π= − + − +u
(e-f) ( ) ( ) ( )2sin 2 50 200 2 2g t t tπ π= − + − +u
3.92 3.94 3.96 3.98 4 4.02 4.04-1
-0.5
0
0.5
1
3.92 3.94 3.96 3.98 4 4.02 4.040
0.2
0.4
0.6
0.8
1
(e-g) ( ) ( ) ( )3 36 42 2g t t t= − + + − +u r
(e-h)
( ) ( )2 3 2 60 otro
t tg t
t⎧ − + < <
= ⎨⎩
u
0 2 4 6 80
1
2
3
4
5
0 5 100
0.2
0.4
0.6
0.8
1
(e-i) ( ) ( )5 20 2 2tg t e t−= − +u
(e-j) ( ) ( )5 20 2tg t e t−= −u
2 3 4 5 60
0.2
0.4
0.6
0.8
1
-2 0 2 40
0.5
1
1.5
2
2.5x 10-9

(e-k) ( ) ( )5 2tg t e t= −u
(e-l) ( ) ( ) ( )5 5 20 20 2 2j t jg t e t+ − += − +u
-2 0 2 40
0.2
0.4
0.6
0.8
1
-0.5 0 0.5 1-0.4
-0.3
-0.2
-0.1
0
0.1
(e-m) ( ) ( ) ( )5 20 2 2j tg t e t−= − +u
(e-n) ( ) ( ) ( )5 5 20 20 2 2j t jg t e t+ − += − +r
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-0.02 0 0.02 0.04-0.04
-0.03
-0.02
-0.01
0
0.01
(f) (f-a) ( ) ( ) ( ) ( )4 2 4 3 4 3g t t t t= + + − −u u r
(f-b) ( ) ( ) ( ) ( )4 2 4 3 4 3g t t t t= − − + − −u u r
-1 0 1 20
2
4
6
-1 0 1 20
1
2
3
4
5
(f-c) ( ) ( ) ( ) ( )4 2 4 2 4 2g t t t tδ= + + + + − −u u
(f-d) ( ) ( )sin 2 200 200g t tπ π= +
-1.5 -1 -0.5 0 0.50
0.5
1
1.5
2
-0.505 -0.5 -0.495 -0.49-1
-0.5
0
0.5
1

(f-e) ( ) ( ) ( )sin 2 200 1199 6 4 2g t t tπ π= + +u
(f-f) ( ) ( ) ( )2sin 2 200 200 4 2g t t tπ π= + +u
-0.505 -0.5 -0.495 -0.49-1
-0.5
0
0.5
1
-0.505 -0.5 -0.495 -0.490
0.2
0.4
0.6
0.8
1
(f-g) ( ) ( ) ( )12 6 12 4g t t t= + + +u r
(f-h)
( ) ( )4 3 -3 4 -1 40 otro t t
g tt
⎧ + < <= ⎨⎩
u
-1 -0.5 00
1
2
3
4
5
-1 -0.5 00
0.2
0.4
0.6
0.8
1
(f-i) ( ) ( )40 20 4 2tg t e t− −= +u
(f-j) ( ) ( )40 20 4tg t e t− −= u
-0.7 -0.6 -0.5 -0.4 -0.30
0.2
0.4
0.6
0.8
1
-0.4 -0.2 0 0.20
0.5
1
1.5
2
2.5x 10-9
(f-k) ( ) ( )40 4tg t e t−= u
(f-l) ( ) ( ) ( )40 40 20 20 4 2j t jg t e t− + − += +u
-0.4 -0.2 0 0.20
0.2
0.4
0.6
0.8
1
-0.5 0 0.5 1-0.4
-0.3
-0.2
-0.1
0
0.1

(f-m) ( ) ( ) ( )40 20 4 2j tg t e t− += +u
(f-n) ( ) ( ) ( )40 40 20 20 4 2j t jg t e t− + − += +r
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-0.02 0 0.02 0.04-0.04
-0.03
-0.02
-0.01
0
0.01
8.- (a) ( ) ( ) ( ) ( )1 1 5 56 6g t t t t= + − −u u r
(b) ( ) ( ) ( ) ( )1 1 5 55 5g t t t t= − + − −u u r
(c) ( ) ( ) ( ) ( )g t t t tδ= + + −u u
(d) ( ) ( ){ }1 sin 2 50 12g t tπ= +
(e) ( ) ( ) ( ){ }1 sin 2 50 6 12g t t tπ π= − +u
(f) ( ) ( ) ( )2sin 2 50g t t tπ= u
(g) ( ) ( ) ( )1 13 3 229 29g t t t= + −u r
(h) ( ) ( )1 1 10 otro
t tg t
t⎧ + − < <
= ⎨⎩
u
(i) ( ) ( )10tg t e t−= u
(j) ( ) ( )10 20 2tg t e t− += −u
(k) ( ) ( ) ( )10 2 2tg t e t− −= −u
(l) ( ) ( ) ( )10 10j tg t e t− += u
(m) ( ) ( )10j tg t e t−= u
(n) ( ) ( ) ( )10 10 1j tg t e t− + += r

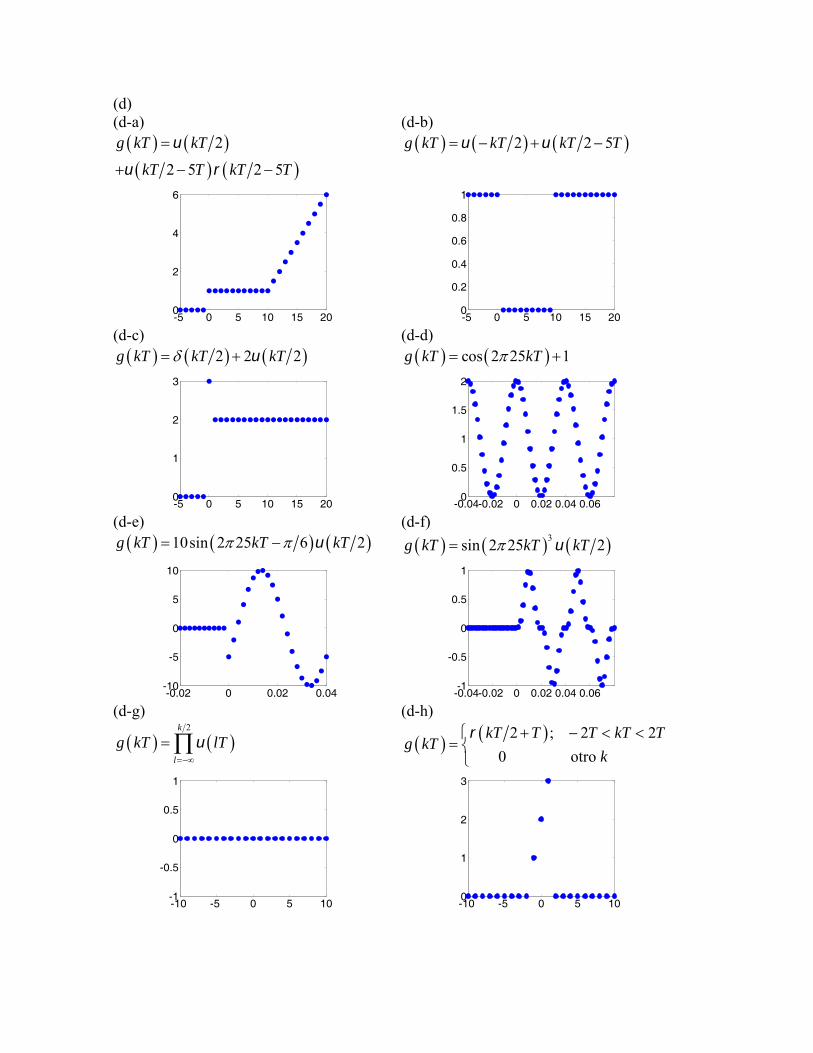
9.- (a) (a-a) ( ) ( )
( ) ( )10
10 5 5 2
g kT kT
kT T kT T
=
+ − − +
u
u r
(a-b) ( ) ( ) ( )10 10 5 2g kT kT kT T= − + − +u u
-5 0 5 100
20
40
60
80
-5 0 5 102
4
6
8
10
12
(a-c) ( ) ( ) ( )10 20 2g kT kT kTδ= + +u
(a-d) ( ) ( )10cos 2 50 12g kT kTπ= +
-5 0 5 100
10
20
30
40
-0.02 0 0.02 0.040
5
10
15
20
25
(a-e) ( )
( ) ( )100sin 2 50 6 2
g kT
kT kTπ π= − +u
(a-f) ( ) ( ) ( )310sin 2 50 2g kT kT kTπ= +u
-0.02 0 0.02 0.04-100
-50
0
50
100
-0.02 0 0.02 0.04-10
-5
0
5
10
15
(a-g)
( ) ( )10 2k
l
g kT lT=−∞
= +∏u
(a-h)
( ) ( )10 2; 2 otro kT T T kT T
g kTk
⎧ + + − < <= ⎨⎩
r
-5 0 51
1.5
2
2.5
3
-5 0 52
4
6
8
10
12

(b) (b-a) ( ) ( )
( ) ( )10
10 5 5 20
g kT kT
kT T kT T
=
+ − − +
u
u r
(b-b) ( ) ( ) ( )10 10 5 20g kT kT kT T= − + − +u u
-5 0 5 1020
40
60
80
-5 0 5 1020
22
24
26
28
30
(b-c) ( ) ( ) ( )10 20 20g kT kT kTδ= + +u
(b-d) ( ) ( )10cos 2 50 30g kT kTπ= +
-5 0 5 1020
30
40
50
-0.02 0 0.02 0.0420
25
30
35
40
(b-e) ( )
( ) ( )100sin 2 50 6 20
g kT
kT kTπ π
=
− +u
(b-f) ( ) ( ) ( )310sin 2 50 20g kT kT kTπ= +u
-0.02 0 0.02 0.04-100
-50
0
50
100
150
-0.02 0 0.02 0.0410
15
20
25
30
(b-g)
( ) ( )10 20k
l
g kT lT=−∞
= +∏u
(b-h)
( ) ( )10 20; 20 otro kT T T kT T
g kTk
⎧ + + − < <= ⎨⎩
r
-5 0 519
19.5
20
20.5
21
-5 0 520
22
24
26
28
30

(c) (c-a) ( ) ( )( ) ( )
2
3 3
g kT kT T
kT T kT T
= − +
+ − − − −
u
u r
(c-b) ( ) ( ) ( )2 3g kT kT T kT T= − + − −u u
-5 0 5 100
1
2
3
-5 0 5 100
0.2
0.4
0.6
0.8
1
(c-c) ( ) ( ) ( )2 2 2g kT kT T kT Tδ= − + + − +u
(c-d) ( ) ( )( )cos 2 50 2 1g kT kT Tπ= − + +
-5 0 5 100
1
2
3
-0.02 0 0.020
0.5
1
1.5
2
(c-e) ( )
( )( ) ( )10sin 2 50 2 6 2
g kT
kT T kT Tπ π
=
− + − − +u
(c-f) ( ) ( )( ) ( )3
sin 2 50 2 2g kT kT T kT Tπ= − + − +u
-0.02 0 0.02 0.04-10
-5
0
5
10
-0.02 0 0.02-1
-0.5
0
0.5
1
(c-g)
( ) ( )2k
l
g kT lT− +
=−∞
= ∏u
(c-h)
( ) ( )3 30 otro kT T T kT T
g kTk
⎧ − + < <= ⎨⎩
r
-2 0 2 4 6-1
-0.5
0
0.5
1
-2 0 2 4 60
0.2
0.4
0.6
0.8
1
(d) (d-a) ( ) ( )( ) ( )
2
2 5 2 5
g kT kT
kT T kT T
=
+ − −
u
u r
(d-b) ( ) ( ) ( )2 2 5g kT kT kT T= − + −u u
-5 0 5 10 15 200
2
4
6
-5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
(d-c) ( ) ( ) ( )2 2 2g kT kT kTδ= + u
(d-d) ( ) ( )cos 2 25 1g kT kTπ= +
-5 0 5 10 15 200
1
2
3
-0.04-0.02 0 0.02 0.04 0.060
0.5
1
1.5
2
(d-e) ( ) ( ) ( )10sin 2 25 6 2g kT kT kTπ π= − u
(d-f) ( ) ( ) ( )3sin 2 25 2g kT kT kTπ= u
-0.02 0 0.02 0.04-10
-5
0
5
10
-0.04-0.02 0 0.02 0.04 0.06-1
-0.5
0
0.5
1
(d-g)
( ) ( )2k
l
g kT lT=−∞
= ∏u
(d-h)
( ) ( )2 ; 2 20 otro
kT T T kT Tg kT
k⎧ + − < <
= ⎨⎩
r
-10 -5 0 5 10-1
-0.5
0
0.5
1
-10 -5 0 5 100
1
2
3

(e) (e-a) ( ) ( )( ) ( )
2 2
2 3 2 3
g kT kT T
kT T kT T
= − + +
− − − −
u
u r
(e-b) ( ) ( ) ( )2 2 2 3g kT kT T kT T= − + − −u u
-10 -5 0 5 100
1
2
3
-10 -5 0 5 100
0.2
0.4
0.6
0.8
1
(e-c) ( ) ( ) ( )2 2 2 2 2g kT kT T kT Tδ= − + + − +u
(e-d) ( ) ( )( )cos 2 25 4 1g kT kT Tπ= − + +
-10 -5 0 5 100
1
2
3
-0.06-0.04-0.02 0 0.02 0.040
0.5
1
1.5
2
(e-e) ( ) ( )( )( )
10sin 2 25 4 6
2 2
g kT kT T
kT T
π π= − + −
− +u
(e-f) ( ) ( )( ) ( )3
sin 2 25 4 2 2g kT kT T kT Tπ= − + − +u
-0.04 -0.02 0 0.02 0.04-10
-5
0
5
10
-0.06-0.04-0.02 0 0.02 0.04-1
-0.5
0
0.5
1
(e-g)
( ) ( )2 2k
l
g kT lT−
=−∞
= ∏ u
(e-h)
( ) ( )2 3 2 60 otro
kT T T kT Tg kT
k⎧ − + < <
= ⎨⎩
r
-5 0 5 10-1
-0.5
0
0.5
1
-5 0 5 100
1
2
3

(f) (f-a) ( ) ( )( ) ( )
4 2
4 3 4 3
g kT kT T
kT T kT T
= +
+ − −
u
u r
(f-b) ( ) ( ) ( )4 2 4 3g kT kT T kT T= − − + −u u
-5 0 50
5
10
15
20
-5 0 50
0.2
0.4
0.6
0.8
1
(f-c) ( ) ( ) ( )4 2 2 4 2g kT kT T kT Tδ= + + +u
(f-d) ( ) ( )( )cos 2 100 2 1g kT kT Tπ= + +
-5 0 50
0.5
1
1.5
2
0 5 10
x 10-3
0
0.5
1
1.5
2
(f-e) ( ) ( )( )( )
10sin 2 100 2 6
4 2
g kT kT T
kT T
π π= + −
+u
(f-f) ( ) ( )( ) ( )3
sin 2 100 2 4 2g kT kT T kT Tπ= + +u
-0.02 0 0.02 0.04-10
-5
0
5
10
0 5 10
x 10-3
-1
-0.5
0
0.5
1
(f-g)
( ) ( )4 2k
l
g kT lT+
=−∞
= ∏u
(f-h)
( ) ( ) -3 -14 3 4 40 otro
kT T T kT Tg kT
k
⎧ + < <⎪= ⎨⎪⎩
r
-5 0 5-1
-0.5
0
0.5
1
-2 -1 0 1 20
1
2
3

10.- (a) ( ) ( ) ( ) ( )1 1 5 56 6g kT kT kT T kT T= + − −u u r
(b) ( ) ( ) ( )5g kT kT kT T= − + −u u
(c) ( ) ( ) ( )12g kT kT kTδ= +u
(d) ( ) ( )1 1cos 2 502 2g kT kTπ= +
(e) ( ) ( ) ( )1 1sin 2 50 62 2g kT kT kTπ π= − +u
(f) ( ) ( ) ( )31 1sin 2 502 2g kT kT kTπ= +u
(g) ( ) ( )k
l
g kT lT=−∞
= ∏u
(h) ( ) ( )1 20 otro
kT T T kT Tg kT
k
⎧ + − < <⎪= ⎨⎪⎩
r
Nivel Intermedio
1.- (a) ( ) ( ) ( ) ( )2 2 2h t t t t= + − + −r r r
(b)
( ) ( )( ) ( ) ( )( )( ) ( )1 11 cos 2 50 1 cos 2 50 2 22 50 2 50
h t t t t tπ ππ π
= − − − − −u u
(c)
( ) ( ) ( )
( )( ) ( )
( )( )
( )( ) ( )
22
3 22 3
cos 2 5014 2 100
cos 2 50 sin 2 501 4 22 2 26 3 2 50 2 50
1 2 100 2 200 sin 2 100 22 200
th t t t
t ttt t t t
t t t
ππ
π π
π π
π π ππ
⎛ ⎞⎛ ⎞⎜ ⎟= + −⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
⎛ ⎞−− − + − + + − −⎜ ⎟⎜ ⎟⎝ ⎠⎛ ⎞− − − −⎜ ⎟⎝ ⎠
u
u
u
(d) ( ) ( ) ( ) ( )( ) ( )21 1 2tth t e t e t− −−= − − − −u u
(e)
( ) ( ) ( )( )
( )2
sin 2 50 2 50cos 2 50 2 501 2 50
tt t eh t t
π π π π
π
−− +=
+u
(f)
( ) ( ) ( ) ( ) ( )( )( ) ( )
2 2
2
1 2 100 cos 2 100 2 100sin 2 100 2 100
2 1 2 100
tt t eh t t
π π π π π
π
−+ − − −=
+u

2.-
( ) ( ) ( )0
00
*t t
f t t t f dτ τ−
− = ∫u
3.- (a)
( ) ( )0
1 2k
i
ih kT
=
=∑
(b)
( ) 32kh kT =
(c)
( ) ( ) ( )0
sin 2 50 sin 2 50k
i i kh kT iT iTπ π
∞
= =
= −∑ ∑
(d)
( ) ( )( )0
1 2k
i
ih kT kT iT
=
= −∑
(e) ( ) ( )( ) ( )sin 2 50 5 5h kT kT T kT Tπ= − −u
(f) ( ) ( ) ( )51 2 5kh kT kT T−= −r
4.- (a) ( ) ( ) ( )10.5 ky kT u kT T−= − −
(b) ( ) ( ) ( )11.5 ky kT u kT T−= − −
(c) ( ) ( ) ( )10.5 ky kT u kT T−= −
(d) ( ) ( ) ( )11.5 ky kT u kT T−= − 5.-
(a) ( ) ( )( ) ( )2 1 0.53
ky kT u kT= − −
(b) ( ) ( )( ) ( )2 1 1.55
ky kT u kT= − −
(c) ( ) ( )( ) ( )2 1 0.5 ky kT u kT= −
(d) ( ) ( )( ) ( )2 1 1.5 ky kT u kT= − −
6.-
(a) ( ) ( )( ) ( )2 1 0.53
ky kT u kT= − −

(b) ( ) ( )( ) ( )2 1 1.55
ky kT u kT= − −
(c) ( ) ( ) ( ) ( )( ) ( )10.5 2 1 0.5k ky kT u kT T u kT−= − + −
(d) ( ) ( ) ( ) ( )( ) ( )11.5 2 1 1.5k ky kT u kT T u kT−= − − −
7.-
( )( )
( ) ( ) ( )( )
( ) ( )
0
0
sin 2 104 0.4
10
i
Tkg kT kT kT NT
k
g kT g kT iN
π
π∞
=−∞
⎛ ⎞−⎜ ⎟⋅⎝ ⎠= − −−
= −∑
u u
(a) (b)
0 2 4 6 8-0.02
-0.01
0
0.01
0.02h(kT)
0 2 4 6 80.49
0.495
0.5h(kT)
(c) (d)
0 2 4 6 8-20
-10
0
10h(kT)
0 2 4 6 8-20
-10
0
10h(kT)
8.- (a) (a-a) ( ) ( ) ( )3 1.97 0.23 0.510 1.8 1.1 2.9t t th t e e e t− − − −= + − u
(a-b) Respuesta Impulso (a-c) Respuesta escalón
0 10 20-10
-5
0
5x 10-4 h(t)
0 10 20 30-1.5
-1
-0.5
0x 10-3 y(t)

(b)
(b-a) ( )( ) ( )( ) ( )
( )6.3 6.3
0.7 0.7
0.016 cos 25.81 0.0092 sin 25.811300 0.016 cos 4.1 0.21 cos 4.1
t t
t t
e t e th t t
e t e t
− −
− −
⎧ ⎫+⎪ ⎪= ⎨ ⎬− +⎪ ⎪⎩ ⎭
u
(b-b) Respuesta Impulso (b-c) Respuesta escalón
0 2 4 6-5
0
5
10x 10-4 h(t)
0 2 4 60
1
2
3
4x 10-4 y(t)
(c) (c-a) ( ) ( ) ( )0.05 0.05 0.0510 0.5 0.5t t th t e e e t− −= − − u
(c-b) Respuesta Impulso (c-c) Respuesta escalón
0 20 40 60-2
-1
0
1
2x 10-5 h(t)
0 5 10-30
-20
-10
0y(t)
(d) (d-a) ( ) ( )4 0.0003733.73 10 th t e t− −= ⋅ u
(d-b) Respuesta Impulso (d-c) Respuesta escalón
0 1 2 3 40
1
2
3
4x 10-4 h(t)
0 1 2 3 40
0.5
1y(t)
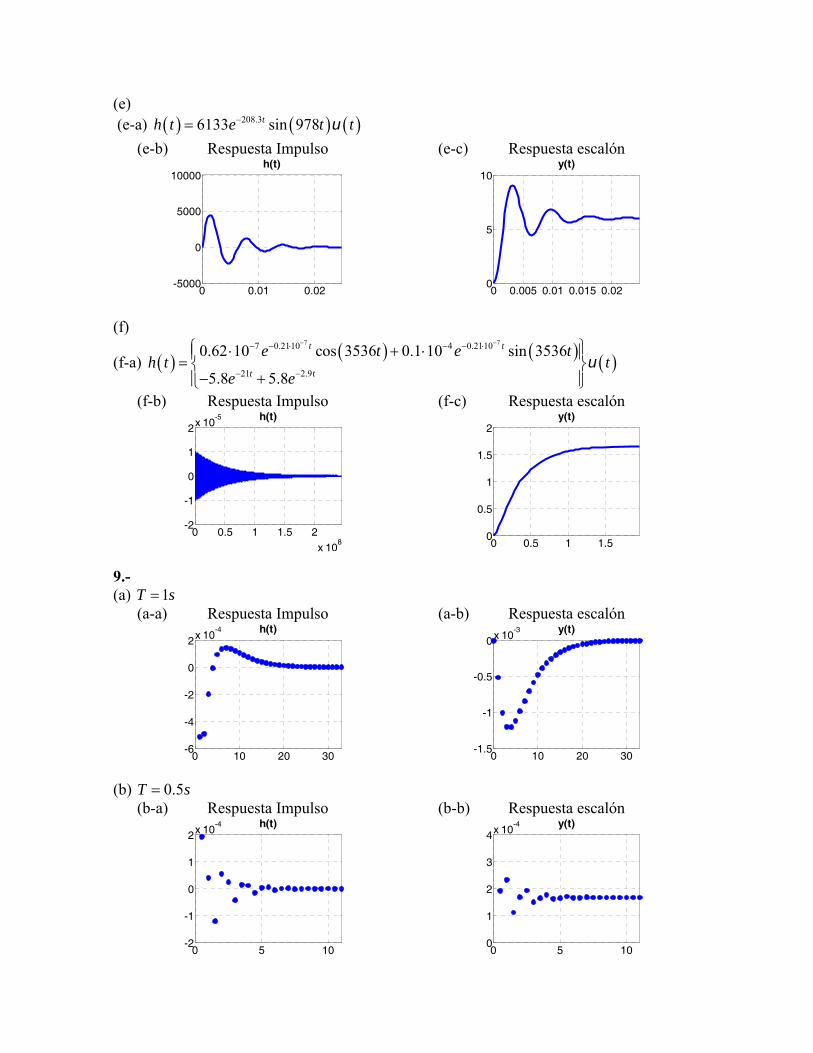
(e) (e-a) ( ) ( ) ( )208.36133 sin 978th t e t t−= u
(e-b) Respuesta Impulso (e-c) Respuesta escalón
0 0.01 0.02-5000
0
5000
10000h(t)
0 0.005 0.01 0.015 0.020
5
10y(t)
(f)
(f-a) ( ) ( ) ( ) ( )7 77 0.2110 4 0.2110
21 2.9
0.62 10 cos 3536 0.1 10 sin 3536
5.8 5.8
t t
t t
e t e th t t
e e
− −− − ⋅ − − ⋅
− −
⎧ ⎫⋅ + ⋅⎪ ⎪= ⎨ ⎬− +⎪ ⎪⎩ ⎭
u
(f-b) Respuesta Impulso (f-c) Respuesta escalón
0 0.5 1 1.5 2x 10
8
-2
-1
0
1
2x 10-5 h(t)
0 0.5 1 1.50
0.5
1
1.5
2y(t)
9.- (a) 1T s=
(a-a) Respuesta Impulso (a-b) Respuesta escalón
0 10 20 30-6
-4
-2
0
2x 10-4 h(t)
0 10 20 30-1.5
-1
-0.5
0x 10-3 y(t)
(b) 0.5T s=
(b-a) Respuesta Impulso (b-b) Respuesta escalón
0 5 10-2
-1
0
1
2x 10-4 h(t)
0 5 100
1
2
3
4x 10-4 y(t)
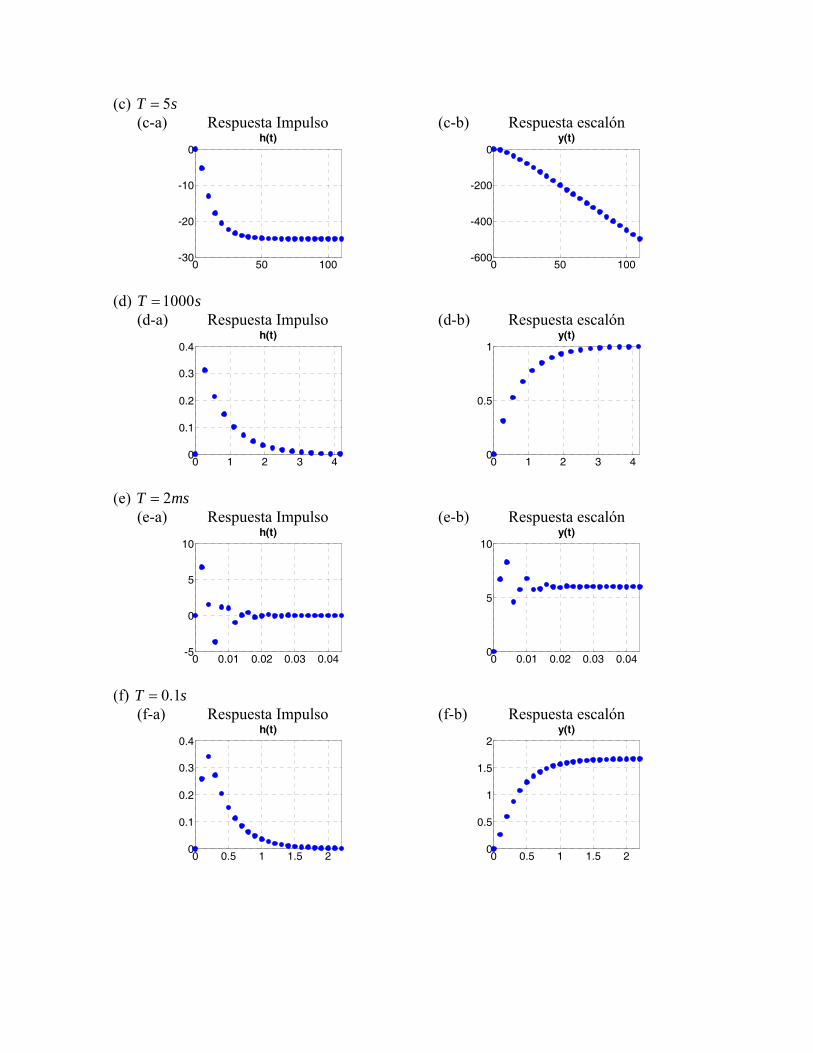
(c) 5T s= (c-a) Respuesta Impulso (c-b) Respuesta escalón
0 50 100-30
-20
-10
0h(t)
0 50 100-600
-400
-200
0y(t)
(d) 1000T s=
(d-a) Respuesta Impulso (d-b) Respuesta escalón
0 1 2 3 40
0.1
0.2
0.3
0.4h(t)
0 1 2 3 40
0.5
1y(t)
(e) 2T ms=
(e-a) Respuesta Impulso (e-b) Respuesta escalón
0 0.01 0.02 0.03 0.04-5
0
5
10h(t)
0 0.01 0.02 0.03 0.040
5
10y(t)
(f) 0.1T s=
(f-a) Respuesta Impulso (f-b) Respuesta escalón
0 0.5 1 1.5 20
0.1
0.2
0.3
0.4h(t)
0 0.5 1 1.5 20
0.5
1
1.5
2y(t)

Nivel Avanzado 1.-
2*f fdt f dt=∫ ∫ 2.-
* 2df dffdt dt
=
3.-
( ) ( ) ( ) ( ) ( )2 2 22p p i ik k k k
x kT x kT x kT x kT x kT∞ ∞ ∞ ∞
=−∞ =−∞ =−∞ =−∞
= + +∑ ∑ ∑ ∑
Desarrollando el segundo término:
( ) ( ) ( ) ( )2 21 04p i
k k k
x kT x kT x kT x kT∞ ∞ ∞
=−∞ =−∞ =−∞
⎧ ⎫= − − =⎨ ⎬⎩ ⎭
∑ ∑ ∑
Finalmente se llega a:
( ) ( ) ( )2 2 2p i
k k kx kT x kT x kT
∞ ∞ ∞
=−∞ =−∞ =−∞
= +∑ ∑ ∑
4.-
( ) ( )( )*i
f g kT T ilT kT T ilT∞
=−∞
= + − − − −∑ u u
• 4l = • 2l = • 1l =
-10 -5 0 5 100
0.2
0.4
0.6
0.8
1
-10 -5 0 5 100
0.5
1
1.5
2
-10 -5 0 5 101
1.5
2
2.5
3
5.- Convolución discreta - Distributividad con respecto a la suma
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
*
* *
i
i
f kT g kT h kT f kT iT g iT h iT
f kT iT g iT f kT iT h iT f kT g kT f kT h kT
∞
=−∞
∞
=−∞
+ = − +⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
= − + − = +⎡ ⎤⎣ ⎦
∑
∑
- Convolución con un Impulso
( ) ( ) ( ) ( ) ( )*i
f kT kT T f kT iT iT T f kT Tδ α δ α α∞
=−∞
− = − − = −∑
- Convolución con un escalón
( ) ( ) ( ) ( ) ( ) ( ) ( )*k
i i i
f kT kT f kT iT iT kT iT f iT f iT∞ ∞
=−∞ =−∞ =−∞
= − = − =∑ ∑ ∑u u u

Convolución discreta cíclica - Distributividad con respecto a la suma
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
1
0
1
0
*
* *
Q
ci
Q
c ci
f kT g kT h kT f kT iT g iT h iT
f kT iT g iT f kT iT h iT f kT g kT f kT h kT
−
=
−
=
+ = − +⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦
= − + − = +⎡ ⎤⎣ ⎦
∑
∑-
Convolución con un Impulso
( ) ( ) ( ) ( ) ( )1
0*
Q
if kT kT T f kT iT iT T f kT Tδ α δ α α
−
=
− = − − = −∑
- Convolución con un escalón
( ) ( ) ( ) ( ) ( ) ( )( )
1 1
0 0 1
*Q Q k
i i i k Q
f kT kT f kT iT iT f kT iT f iT− −
= = = − −
= − = − =∑ ∑ ∑u u

Capitulo 3 Nivel Básico
1.- (a)
( )s se ef s A
s
Δ − Δ−=
(b)
( ) ( )2 2 s sAf s e es
Δ − Δ= − + +Δ
(c)
( ) 4 4 4 40 03 2
0
8 4 4o o o oT T T T
s s s sAf s e sT e e sT es T
− −⎛ ⎞= + − +⎜ ⎟
⎝ ⎠
(d)
( ) ( )2s s s sAf s e s e e s e
sΔ Δ − Δ − Δ= − Δ − − Δ
Δ
(e)
( )0 02 2
T Ts s
s sAf s e e e es
⎛ ⎞ ⎛ ⎞−Δ Δ−⎜ ⎟ ⎜ ⎟Δ − Δ⎝ ⎠ ⎝ ⎠⎛ ⎞
= − + −⎜ ⎟⎜ ⎟⎝ ⎠
(f)
( )0 0 0 04 2 4 2
20
4 2 2T T T T
s s s sAf s e e e eT s
− −⎛ ⎞= − − +⎜ ⎟
⎝ ⎠
2.- (a)
( )j je ef A
j
ω ω
ωω
Δ − Δ−=
(b)
( ) ( )2 2 j jAf e eω ωωω
Δ − Δ= − − + +Δ
(c)
( ) 4 4 4 40 03 2
0
8 4 4o o o oT T T T
j j j jj Af e j T e e j T eT
ω ω ω ωω ω ω
ω− −⎛ ⎞
= + − +⎜ ⎟⎝ ⎠
(d)
( ) ( )2j j j jAf e j e e j eω ω ω ωω ω ω
ωΔ Δ − Δ − Δ= − − Δ − − Δ
Δ
(e)
( )0 02 2
T Tj j
j jAf e e e ej
ω ωω ωω
ω
⎛ ⎞ ⎛ ⎞−Δ Δ−⎜ ⎟ ⎜ ⎟Δ − Δ⎝ ⎠ ⎝ ⎠⎛ ⎞
= − + −⎜ ⎟⎜ ⎟⎝ ⎠
(f)

( )0 0 0 04 2 4 2
20
4 2 2T T T T
j j j jAf e e e eT
ω ω ω ωω
ω− −⎛ ⎞
= − − − +⎜ ⎟⎝ ⎠
3.- (a) (b) (c)
-5 0 50
5
10
15f(ω)
-5 0 50
2
4
6f(ω)
-5 0 50
2
4
6
8f(ω)
(d) (e) (f)
-5 0 50
2
4
6f(ω)
-5 0 5-1
-0.5
0
0.5
1f(ω)
-5 0 50
5
10
15f(ω)
4.- (a)
( )0 0
2
jn jne ef n Aj n
ω ω
π
Δ − Δ−= , 0
0
2Tπω =
(b)
( ) ( )0 002 2 2
4jn jnATf n e e
nω ω
πΔ − Δ= − − + +
Δ, 0
0
2Tπω =
(c)
( ) 2 2 2 23 3 4 2 4 2
jn jn jn jnjAf n e j ne e j nen
π π π π
π ππ
− −⎛ ⎞= + − +⎜ ⎟
⎝ ⎠
(d)
( ) ( )0 0 0 000 02 24
jn jn jn jnATf n e jn e e jn en
ω ω ω ωω ωπ
Δ Δ − Δ − Δ= − − Δ − − ΔΔ
, 00
2Tπω =
(e)
( )0 0
0 00 02 2
2
T Tjn jn
jn jnAf n e e e ej n
ω ωω ω
π
⎛ ⎞ ⎛ ⎞−Δ Δ−⎜ ⎟ ⎜ ⎟Δ − Δ⎝ ⎠ ⎝ ⎠⎛ ⎞
= − + −⎜ ⎟⎜ ⎟⎝ ⎠
, 00
2Tπω =
(f)

( ) 2 22 2 2 2
jn jnjn jnAf n e e e en
π ππ π
π− −⎛ ⎞
= − − − +⎜ ⎟⎝ ⎠
5.- (a) (b) (c)
-5 0 50
5
10
15f(n)
f(ω)T
0·f(n)
-5 0 50
2
4
6f(n)
f(ω)T
0·f(n)
-5 0 50
5
10f(n)
f(ω)T
0·f(n)
(d) (e) (f)
-5 0 50
2
4
6f(n)
f(ω)T
0·f(n)
-5 0 5-1
-0.5
0
0.5
1f(n)
f(ω)T
0·f(n)
-5 0 50
5
10
15f(n)
f(ω)T
0·f(n)
6.- (a)
( )0
j je ef Aj
ΩΔ − ΩΔ−Ω =
Ω, ( ) 0
2l
f f lTπ∞
=−∞
⎛ ⎞Ω = Ω−⎜ ⎟⎝ ⎠
∑
(b)
( ) ( )0 2 2 j jAf e eΩΔ − ΩΔΩ = − − + +ΔΩ
, ( ) 02
l
f f lTπ∞
=−∞
⎛ ⎞Ω = Ω−⎜ ⎟⎝ ⎠
∑
(c)
( ) 4 4 4 40 0 03 2
0
8 4 4o o o oT T T Tj j j jj Af e j T e e j T e
Tω ω
− Ω − Ω Ω Ω⎛ ⎞Ω = + − +⎜ ⎟Ω ⎝ ⎠
, ( ) 02
l
f f lTπ∞
=−∞
⎛ ⎞Ω = Ω−⎜ ⎟⎝ ⎠
∑
(d)
( ) ( )0 2j j j jAf e j e e j eΩΔ ΩΔ − ΩΔ − ΩΔΩ = − − ΩΔ − − ΩΔ
ΔΩ, ( ) 0
2l
f f lTπ∞
=−∞
⎛ ⎞Ω = Ω−⎜ ⎟⎝ ⎠
∑
(e)
( )0 02 2
0
T Tj j
j jAf e e e ej
⎛ ⎞ ⎛ ⎞Ω −Δ Ω Δ−⎜ ⎟ ⎜ ⎟ΩΔ − ΩΔ⎝ ⎠ ⎝ ⎠⎛ ⎞
Ω = − + −⎜ ⎟⎜ ⎟Ω ⎝ ⎠, ( ) 0
2l
f f lTπ∞
=−∞
⎛ ⎞Ω = Ω−⎜ ⎟⎝ ⎠
∑
(f)

( )0 0 0 04 2 4 2
0 20
4 2 2T T T T
j j j jAf e e e eT
Ω Ω − Ω − Ω⎛ ⎞Ω = − − − +⎜ ⎟Ω ⎝ ⎠
, ( ) 02
lf f l
Tπ∞
=−∞
⎛ ⎞Ω = Ω−⎜ ⎟⎝ ⎠
∑
7.- (a) (b) (c)
-10 0 100
5
10
15f(Ω)
-20 -10 0 10 200
2
4
6f(Ω)
-20 -10 0 10 200
2
4
6
8f(Ω)
(d) (e) (f)
-20 -10 0 10 200
2
4
6f(Ω)
-20 -10 0 10 20-1
-0.5
0
0.5
1f(Ω)
-20 -10 0 10 200
5
10f(Ω)
8.- (a)
( )0 0
0 2
jm jme ef m Aj m
ω ω
π
Δ − Δ−= , ( ) 0
2l
f m T f m lTπ∞
=−∞
⎛ ⎞= −⎜ ⎟⎝ ⎠
∑
(b)
( ) ( )0 000 2 2 2
4jm jmATf m e e
mω ω
πΔ − Δ= − − + +
Δ, ( ) 0
2l
f m T f m lTπ∞
=−∞
⎛ ⎞= −⎜ ⎟⎝ ⎠
∑
(c)
( ) 2 2 2 20 3 3 4 2 4 2
jm jm jm jmjAf m e j ne e j nem
π π π π
π ππ
− −⎛ ⎞= + − +⎜ ⎟
⎝ ⎠, ( ) 0
2l
f m T f m lTπ∞
=−∞
⎛ ⎞= −⎜ ⎟⎝ ⎠
∑
(d)
( ) ( )0 0 0 000 0 02 24
jm jm jm jmATf m e jm e e jm em
ω ω ω ωω ωπ
Δ Δ − Δ − Δ= − − Δ − − ΔΔ
,
( ) 02
lf m T f m l
Tπ∞
=−∞
⎛ ⎞= −⎜ ⎟⎝ ⎠
∑
(e)
( )0 0
0 00 02 2
0 2
T Tjm jm
jm jmAf m e e e ej m
ω ωω ω
π
⎛ ⎞ ⎛ ⎞−Δ Δ−⎜ ⎟ ⎜ ⎟Δ − Δ⎝ ⎠ ⎝ ⎠⎛ ⎞
= − + −⎜ ⎟⎜ ⎟⎝ ⎠
, ( ) 02
l
f m T f m lTπ∞
=−∞
⎛ ⎞= −⎜ ⎟⎝ ⎠
∑
(f)

( ) 2 20 2 2 2 2
jm jmjm jmAf m e e e em
π ππ π
π− −⎛ ⎞
= − − − +⎜ ⎟⎝ ⎠
, ( ) 02
lf m T f m l
Tπ∞
=−∞
⎛ ⎞= −⎜ ⎟⎝ ⎠
∑
Nivel Intermedio
1.- (a) ( ) ( ) ( )( )2g Aω π ω ω= − + Δ − − −Δu u
(b) ( ) ( ) ( ) ( )( )2 2Ag ω π ω ω ω= − + Δ − − + − −ΔΔ r r r (c)
(c)
( ) 2 0 02
0
162 1 4 4T Tg A
Tω π ω ω ω
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞= − ⋅ − + − − −⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎝ ⎠u u
(d) ( ) ( ) ( )( ) ( ) ( )( ){ }2 Ag Aω π ω ω ω ω= − + Δ − − −Δ − − + Δ + − −ΔΔ r r u u
(e)
( ) ( ) ( )0 02 2 2T Tg Aω π ω ω ω ω⎧ ⎫⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞= − − − + Δ − − + Δ − − −Δ + − − −Δ⎜ ⎟ ⎜ ⎟⎨ ⎬⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎩ ⎭
u u u u
(f)
( ) { }0 0 0 0
0
42 2 22 4 4 2A T T T Tg
Tω π ω ω ω ω⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − − + + − + − − − + − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠r r r r
2.- (a)
( ) ( ) ( ){ } ( ) ( ){ }1cos 2 2 22
j j
o o oe ef A f t f t f f f f
j
ω ω
ω π ω π ω πω
Δ − Δ−= ⇒ = − + +F
(b)
( ) ( ) ( ) ( ){ } ( ) ( ){ }2
12 cos 2 2 22
j jo o o
Af e e f t f t f f f fω ωω π ω π ω πω
Δ − Δ= − − + + ⇒ = − + +Δ
F
(c)
( )
( ) ( ){ } ( ) ( ){ }
4 4 4 40 03 2
0
8 4 4
1cos 2 2 22
o o o oT T T Tj j j j
o o o
j Af e j T e e j T eT
f t f t f f f f
ω ω ω ωω ω ω
ω
π ω π ω π
− −⎛ ⎞= + − + ⇒⎜ ⎟
⎝ ⎠
= − + +F
(d)
( ) ( )
( ) ( ){ } ( ) ( ){ }
2
1cos 2 2 22
j j j j
o o o
Af e j e e j e
f t f t f f f f
ω ω ω ωω ω ωω
π ω π ω π
Δ Δ − Δ − Δ= − − Δ − − Δ ⇒Δ
= − + +F
(e)

( )
( ) ( ){ } ( ) ( ){ }
0 02 2
1cos 2 2 22
T Tj j
j j
o o o
Af e e e ej
f t f t f f f f
ω ωω ωω
ω
π ω π ω π
⎛ ⎞ ⎛ ⎞−Δ Δ−⎜ ⎟ ⎜ ⎟Δ − Δ⎝ ⎠ ⎝ ⎠⎛ ⎞
= − + − ⇒⎜ ⎟⎜ ⎟⎝ ⎠
= − + +F
(f)
( )
( ) ( ){ } ( ) ( ){ }
0 0 0 04 2 4 2
20
4 2 2
1cos 2 2 22
T T T Tj j j j
o o o
Af e e e eT
f t f t f f f f
ω ω ω ωω
ω
π ω π ω π
− −⎛ ⎞= − − − + ⇒⎜ ⎟
⎝ ⎠
= − + +F
4.- (a)
Coeficiente Valor Coeficiente Valor c0 1,00 c5 0,13 c1 0,64 c6 0 c2 0 c7 -0,09 c3 -0,21 c8 0 c4 0 c9 0,07
(b) Coeficiente Valor Coeficiente Valor
c0 0,500 c5 0,016 c1 0,405 c6 0,023 c2 0,203 c7 0,008 c3 0,045 c8 0 c4 0 c9 0,005
(c) Coeficiente Valor Coeficiente Valor
c0 0,667 + 0,01j c5 0,004 c1 0,516 c6 0,023 c2 0,203 c7 -0,002 c3 -0,019 c8 -0,013 c4 -0,051 c9 0,001
(d) Coeficiente Valor Coeficiente Valor
c0 0 c5 0,016j c1 0,405j c6 0,106j c2 0,318j c7 -0,008j c3 -0,045j c8 -0,08j c4 -0,159j c9 0,005j
(e) Coeficiente Valor Coeficiente Valor
c0 0 c5 0 c1 0 c6 0

c2 0 c7 0 c3 0 c8 0 c4 0 c9 0
(f) Coeficiente Valor Coeficiente Valor
c0 0 c5 0,032j c1 0,811j c6 0 c2 0 c7 -0,017j c3 -0,09j c8 0 c4 0 c9 0,01j
5.- (a) ( ) ( ) ( )3 1.97 0.23 0.510 1.8 1.1 2.9t t th t e e e t− − − −= + − u
( )( )( )2
0.172 36 79 16
hj j
ωωω ω ω
=− − −
(b)
( )( ) ( )( ) ( )
( )6.3 6.3
0.7 0.7
0.016 cos 25.81 0.0092 sin 25.811300 0.016 cos 4.1 0.21 cos 4.1
t t
t t
e t e th t t
e t e t
− −
− −
⎧ ⎫+⎪ ⎪= ⎨ ⎬− +⎪ ⎪⎩ ⎭
u
( )2
4 3 2
1 600300 14 740 1200 1200
hj j
ωωω ω ω ω
−= −
− − + +
(c) ( ) ( ) ( )0.05 0.05 0.0510 0.5 0.5t t th t e e e t− −= − − u
( ) ( )5
10h
jω
ω ω=
−
(d) ( ) ( )4 0.0003733.73 10 th t e t− −= ⋅ u
( ) 43.1115300 43
hj
ωω
=+
(e) ( ) ( ) ( )208.36133 sin 978th t e t t−= u
( ) 2
180000003 1250 3000000
hj
ωω ω
=− + +
(f)
( ) ( ) ( ) ( )7 77 0.2110 4 0.2110
21 2.9
0.62 10 cos 3536 0.1 10 sin 3536
5.8 5.8
t t
t t
e t e th t t
e e
− −− − ⋅ − − ⋅
− −
⎧ ⎫⋅ + ⋅⎪ ⎪= ⎨ ⎬− +⎪ ⎪⎩ ⎭
u
( )2
4 3 2
12500000937.59 216 112539625 27009.7500 7031250000
hj j
ωωω ω ω ω
− +=
− − + +

Capitulo 4 Nivel Básico
1.- (a) Ecuación diferencial ordinaria invariante y lineal. (b) Ecuación diferencial ordinaria invariante y lineal. (c) Ecuación diferencial ordinaria variante y lineal. (d) Ecuación diferencial ordinaria invariante y no-lineal. (e) Ecuación diferencial parcial invariante y lineal. (f) Ecuación diferencial parcial invariante y no-lineal. (g) Ecuación diferencial ordinaria invariante y no-lineal. (h) Ecuación diferencial ordinaria invariante y no-lineal. (i) Ecuación diferencial ordinaria invariante y lineal. (j) Ecuación diferencial ordinaria invariante y lineal. (k) Ecuación de diferencias ordinaria invariante y lineal. (l) Ecuación de diferencias ordinaria invariante y lineal. (m) Ecuación de diferencias ordinaria variante y lineal. (n) Ecuación de diferencias ordinaria invariante y no-lineal. (ñ) Ecuación de diferencias ordinaria invariante y no-lineal. (o) Ecuación de diferencias ordinaria invariante y no-lineal. (p) Ecuación de diferencias ordinaria invariante y lineal. (q) Ecuación de diferencias ordinaria variante y lineal.
2.- (a)
( ) ( )( )1 cos ( )fy t t t= − u
( ) ( ) ( )( )0 0cos sin ( )hy t y t y t t= + u
( ) ( ) ( ) ( ) ( ) ( )( )0 0cos sin 1 cos ( )f hy t y t y t y t y t t t= + = + + − u
( ) ( ) ( ) ( )( )0 0cos sin 1 cos ( )ssy t y t y t t t= + + − u
( ) ( ) ( ) 0tr ssy t y t y t= − = (b)
( ) ( )11 1 ( )tfy t e t−= − u
( ) 0 ( )thy t y e t−= u
( ) ( ) ( ) ( ){ }011 1 ( )t tf hy t y t y t e y e t− −= + = − + u
( ) 11 ( )ssy t t= u
( ) ( ) ( ) ( )0 11 ( )ttr ssy t y t y t y e t−= − = − u
(c) ( ) 5 ( )t
fy t e t−= u
( ) 50 ( )t
hy t y e t−= u
( ) ( ) ( ) ( ) 50 1 ( )t
f hy t y t y t y e t−= + = + u ( ) 0ssy t =

( ) ( ) ( ) ( ) 50 1 ( )t
tr ssy t y t y t y e t−= − = + u
(d) ( ) ( )25 4 ( )t
fy t e t−= − u
( ) 20 ( )t
hy t y e t−= u
( ) ( ) ( ) ( )2 205 4 ( )t t
f hy t y t y t e y e t− −= + = − + u
( ) 5 ( )ssy t t= u
( ) ( ) ( ) ( ) 20 4 ( )t
tr ssy t y t y t y e t−= − = − u (e)
( ) ( )( ){ }1 1 cos 3 1 ( 1)3fy t t t= − − −u
( ) ( ) ( )00 cos 3 sin 3 ( )
3hyy t y t t t⎧ ⎫= +⎨ ⎬
⎩ ⎭u
( ) ( ) ( ) ( )( ){ } ( ) ( )00
1 1 cos 3 1 ( 1) cos 3 sin 3 ( )3 3f h
yy t y t y t t u t y t t t⎧ ⎫= + = − − − + +⎨ ⎬⎩ ⎭
u
( ) ( )( ){ } ( ) ( )00
1 1 cos 3 1 ( 1) cos 3 sin 3 ( )3 3ss
yy t t u t y t t t⎧ ⎫= − − − + +⎨ ⎬⎩ ⎭
u
( ) ( ) ( ) 0tr ssy t y t y t= − = (f)
( ) ( )( )2 1 25 1 ( 1) ( )t tfy t e t e t− − −= − − +u u
( ) 20 ( )t
hy t y e t−= u
( ) ( ) ( ) ( )( ) ( )2 1 205 1 ( 1) ( )t t
f hy t y t y t e t y e t− − −= + = − − + +u u
( ) 5 ( 1)ssy t t= −u
( ) ( ) ( ) ( ) ( )2 120 ( ) ( 1)tt
tr ssy t y t y t y e t e t− −−= − = + − −u u (g)
( ) 0fy kT =
( ) ( )0 0 ( )khy kT y a kT= − u
( ) ( ) ( ) ( )0 0 ( )kf hy kT y kT y kT y a kT= + = − u
( ) 0ssy kT =
( ) ( )0 0 ( )ktry kT y a kT= − u
(h)

( ) ( )( )2 1 0.5 ( )3
kfy kT kT= − − u
( ) ( )0 0.5 ( )khy kT y kT= − u
( ) ( ) ( ) ( )( ) ( )02 1 0.5 0.5 ( )3
k kf hy kT y kT y kT y kT⎧ ⎫= + = − − + −⎨ ⎬
⎩ ⎭u
( ) 2 ( )3ssy kT kT= u
( ) ( ) ( ) ( )02 0.5 ( )3
ktr ssy kT y kT y kT y kT⎛ ⎞= − = − −⎜ ⎟
⎝ ⎠u
(i)
( ) ( )( )2 1 1.5 ( )5
kfy kT kT= − − u
( ) ( )0 1.5 ( )khy kT y kT= − u
( ) ( ) ( ) ( )( ) ( )02 1 1.5 1.5 ( )5
k kf hy kT y kT y kT y kT⎧ ⎫= + = − − + −⎨ ⎬
⎩ ⎭u
( ) 0ssy kT =
( ) ( ) ( ) ( )( ) ( )02 1 1.5 1.5 ( )5
k ktr ssy kT y kT y kT y kT⎧ ⎫= − = − − + −⎨ ⎬
⎩ ⎭u
3.-
(a) 2 1s + (b) 1s + (c) 5s + (d) 2s + (e) 2 3s + (f) 2s + (g) 0z a+ (h) 0.5z + (i) 1.5z + (j) 2 1.5z + (k) 2 1.5z + (l) 2 1.5z +
4.- (a) 1,2s j= ± (b) 1 1s = − (c) 1 5s = − (d) 1 2s = −
(e) 1,2 3s j= ± (f) 1 2s = − (g) 1 0z a= − (h) 1 0.5z = −
(i) 1 1.5z = − (j) 1,2 1.5z j= ± (k) 1,2 1.5z j= ± (l) 1,2 1.5z j= ± 5.- (a)
( ) ( ) ( ) ( ){ }5 2 5 2 210 204 8 2 8 12 1 ( )t t t t ty t x e e x e e e t− − − − −= − + + + + − u
( ) ( )5 2 5 210 20( ) 4 8 ( ) 2 8 ( )t t t t
hy t x e e t x e e t− − − −= − + + +u u
( )2( ) 12 1 ( )tfy t e t−= − u
( ) 12 ( )ssy t t= u
( ) ( )5 2 5 2 210 20( ) ( ) ( ) 4 8 ( ) 2 8 ( ) 12 ( )t t t t t
tr ssy t y t y t x e e t x e e t e t− − − − −= − = − + + + −u u u (b)

( ) ( )5 2 5 2 5 210 20
1 1 6 2 1( ) 2 2 2 - ( )3 3 5 15 3
t t t t t ty t x e e x e e e e t⎧ ⎫= − + + + +⎨ ⎬⎩ ⎭
u
( ) ( )5 2 5 210 20
1 1( ) 2 2 ( ) 2 ( )3 3
t t t thy t x e e t x e e t= − + +u u
5 26 2 1( ) - ( )5 15 3
t tfy t e e t⎛ ⎞= +⎜ ⎟
⎝ ⎠u
( ) ( )5 2 5 2 5 210 20
1 1 6 2 1( ) 2 2 2 - ( )3 3 5 15 3
t t t t t tssy t x e e x e e e e t⎧ ⎫= − + + + +⎨ ⎬
⎩ ⎭u
( ) 0try t = (c)
( ) { }2 2 210 202 10 9 ( )t t ty t x e x e e t− − −= + + − u
2 210 20( ) ( ) 2 ( )t t
hy t x e t x e t− −= +u u
( )2( ) 10 9 ( )tfy t e t−= − u
( ) 10 ( )ssy t t= u
( ) 210 20( ) ( ) ( ) 2 9 ( )t
tr ssy t y t y t x x e t−= − = + − u (d)
( ) ( ) ( ) ( ){ }10 202 2 2 3 3 2 ( )k k ky kT x x kT= − + − + − − u
( ) ( )10 20( ) 2 ( ) 2 2 ( )k khy t x kT x kT= − + −u u
( ) ( )( ) ( )3 1 2 kfy kT kT= − − u
( ) 10 ( )ssy kT u kT=
( )( )10 20( ) ( ) ( ) 2 3 2 ( )ktr ssy kT y kT y kT x x u kT= − = + − −
6.- (a)
5 2 5 2
5 2 5 2
21( )3 2 2 2
t t t t
t t t t
e e e et
e e e e
− − − −
− − − −
⎡ ⎤+ − += ⎢ ⎥− + +⎣ ⎦
Φ
(b) 5 2 5 2
5 2 5 2
21( )3 2 2 2
t t t t
t t t t
e e e et
e e e e⎡ ⎤+ −
= ⎢ ⎥− +⎣ ⎦Φ
(c) 5 2 5 2
5 2 5 2
2 2 21( )3 2
t t t t
t t t t
e e e et
e e e e
− − − −
− − − −
⎡ ⎤+ − += ⎢ ⎥− + +⎣ ⎦
Φ
(d) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
2· 5 2 2· 5 2· 21( )3 5 2 5 2· 2
k k k k
k k k kk
⎡ ⎤− + − − − + −⎢ ⎥=⎢ ⎥− − + − − + −⎣ ⎦
Φ

7.- (a)
5 21 2,t te eλ λ− −= =
(b) 5 2
1 2,t te eλ λ= = (c) 5 2
1 2,t te eλ λ− −= = (d)
( ) ( )1 25 , 2k kλ λ= − = −
Nivel Intermedio 1.- Respuesta escalón (para 0 < ξ < 1):
( ) ( )( )
22 20 0 0 2 1 0
2 20 0
1sin 1 tan ( )1
ntn nh n
nn
y y y yy t e t ty y
ξωξω ω ξω ξ
ξωω ξ− −
⎛ ⎞⎛ ⎞+ + −⎜ ⎟⎜ ⎟= − +⎜ ⎟⎜ ⎟+− ⎝ ⎠⎝ ⎠
u
22 1
2
11( ) 1 sin 1 tan ( )1
ntf ny t k e t tξω ξ
ω ξξξ
− −⎧ ⎫⎛ ⎞⎛ ⎞−⎪ ⎪⎜ ⎟⎜ ⎟= − − +⎨ ⎬⎜ ⎟⎜ ⎟−⎪ ⎪⎝ ⎠⎝ ⎠⎩ ⎭
u
( ) ( )ssy t ku t=
( )
( )( )
22 20 0 0 2 1 0
2 20 0
22 1
2
1sin 1 tan1
( )1sin 1 tan
1
n
n
tn nn
nn
tr
tn
y y y ye ty y
y t tk e t
ξω
ξω
ξω ω ξω ξ
ξωω ξ
ξω ξ
ξξ
− −
− −
⎧ ⎫⎛ ⎞⎛ ⎞+ + −⎪ ⎪⎜ ⎟⎜ ⎟− +⎜ ⎟⎜ ⎟+⎪ ⎪− ⎝ ⎠⎪ ⎪⎝ ⎠= ⎨ ⎬
⎛ ⎞⎛ ⎞⎪ ⎪−⎜ ⎟⎜ ⎟− − +⎪ ⎪⎜ ⎟⎜ ⎟−⎪ ⎪⎝ ⎠⎝ ⎠⎩ ⎭
u
Para ( )( ) sinu t tω= :
( ) ( )( )
22 20 0 0 2 1 0
2 20 0
1sin 1 tan ( )
1ntn n
h nnn
y y y yy t e t t
y yξωξω ω ξ
ω ξξωω ξ
− −⎛ ⎞⎛ ⎞+ + −⎜ ⎟⎜ ⎟= − +
⎜ ⎟⎜ ⎟+− ⎝ ⎠⎝ ⎠u
( )
21
2 222 2 2 2 2
2( ) sin tan4
n nf
nn n
ky t tω ξω ωωω ωω ω ξ ω ω
−⎛ ⎞⎛ ⎞= −⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠⎝ ⎠− +
( )
21
2 222 2 2 2 2
2( ) sin tan4
n nss
nn n
ky t tω ξω ωωω ωω ω ξ ω ω
−⎛ ⎞⎛ ⎞= −⎜ ⎟⎜ ⎟⎜ ⎟−⎝ ⎠⎝ ⎠− +
( ) ( )( )
22 20 0 0 2 1 0
2 20 0
1sin 1 tan ( )
1ntn n
tr nnn
y y y yy t e t t
y yξωξω ω ξ
ω ξξωω ξ
− −⎛ ⎞⎛ ⎞+ + −⎜ ⎟⎜ ⎟= − +
⎜ ⎟⎜ ⎟+− ⎝ ⎠⎝ ⎠u

2.-
[ ]0 1( ) ( ), ( ) 1 1 ( )
1 1kT T kT y kT kT⎡ ⎤
+ = =⎢ ⎥⎣ ⎦
x x x
3.-
(a) ( )2
1( )1
y ss s
=+
(b) 1( )5
y ss
=+
(c) ( )
10( )2
sy ss s+
=+
(d) ( )
10( )2
ss ey ss s
−+=
+ (e)
( )( )( )
1 0.5zy z
z z=
− + (f)
( )( )( )
1 1.5zy z
z z=
− +
(g)( )( )2
5( )1 1.5
zy zz z
=− +
(h) ( )( )( )2
5 1( )
1 1.5z z
y zz z
+=
− + (i) 24( )
( 2)y s
s s=
+
(j) 2 7 12( )
( 5)( 2)s sy s
s s s− +
=− −
(k) ( )
9( )1 ( 2)
zy zz z
=− +
(l) 2
2
3 5( )3 4 1
z z zy zz z z+ +
=+ + −
4.-
(a) 2
0( )
0
t
t
et
e
−
−
⎡ ⎤= ⎢ ⎥⎣ ⎦
Φ
(b) ( )2 2 2 2
2 2 2 2
21( ) 22
2 2
t t t t
t t t t
e e e et
e e e e
− −
− −
⎡ ⎤+ − +⎢ ⎥= ⎢ ⎥
⎢ ⎥− + +⎣ ⎦
Φ
5.-
(a) 1
2
0( )
0
k
kkα
α⎡ ⎤
= ⎢ ⎥⎣ ⎦
Φ
(b) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1 11 2 1 2 1 2 1 2
2 2
2 21 2 1 2 1 2 1 2
1 1
1( )2
k k k k
k k k kk
α αα α α α α α α αα α
α αα α α α α α α αα α
⎡ ⎤+ − − −⎢ ⎥
⎢ ⎥= ⎢ ⎥⎢ ⎥− − + −⎢ ⎥⎣ ⎦
Φ
6.-
( )( ) diag tt eλ= ⇒-1Φ T T 1( )2
jt jt jt jt
jt jt jt jt
e e je jet
je je e e
− −
− −
⎡ ⎤+ − += ⎢ ⎥− +⎣ ⎦
Φ
( )( ) diag kk λ= ⇒-1Φ T T( ) ( ) ( ) ( )( ) ( ) ( ) ( )
1( )2
k k k k
k k k k
j j j j j jk
j j j j j j
⎡ ⎤+ − − + −⎢ ⎥=⎢ ⎥− − + −⎣ ⎦
Φ
Nivel Avanzado 1.-
0z za bx y∂ ∂
+ =∂ ∂
( , )z zx f x yx y∂ ∂
− =∂ ∂
Ecuación de Laplace: Ecuación de calor unidimensional:
2 2 2
2 2 2 0x y zϕ ϕ ϕ∂ ∂ ∂+ + =
∂ ∂ ∂
22
2
u uct x
∂ ∂=
∂ ∂
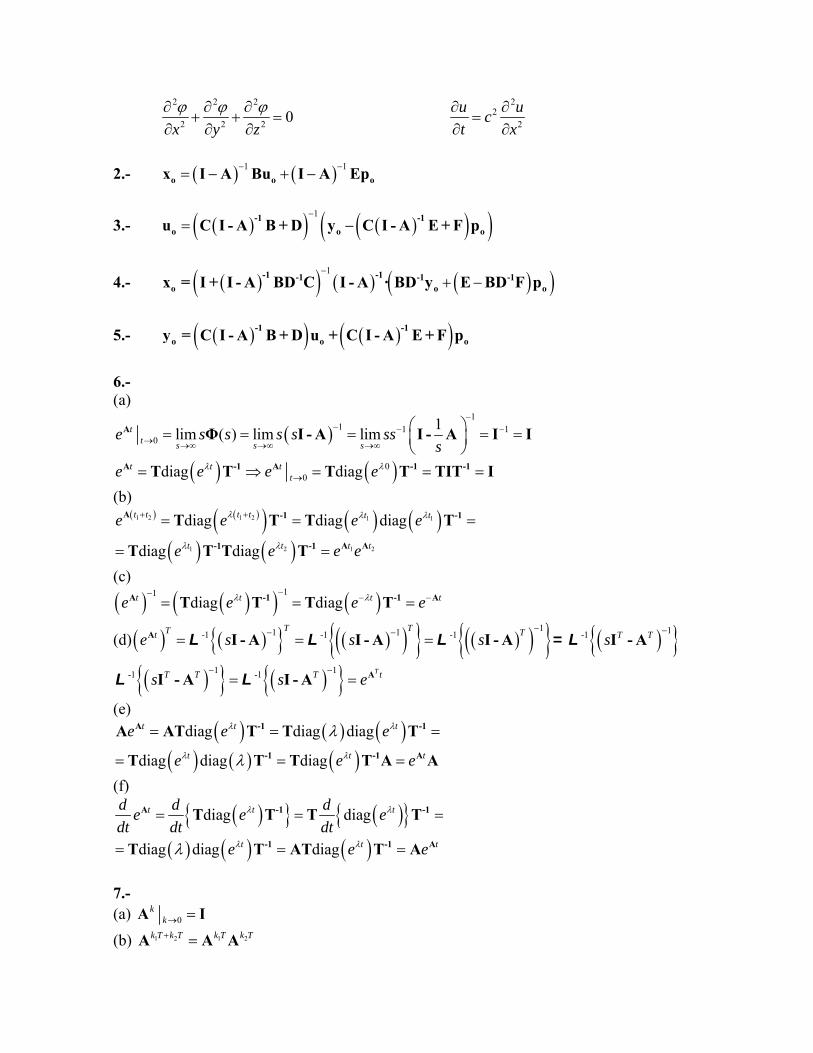
2.- ( ) ( )1 1− −= − + −o o ox I A Bu I A Ep
3.- ( )( ) ( )( )( )1−= −-1 -1
o o ou C I - A B + D y C I - A E + F p
4.- ( )( ) ( ) ( )( )1−+ −-1 -1-1 -1 -1
o o ox = I + I - A BD C I - A · BD y E BD F p
5.- ( )( ) ( )( )-1 -1
o o oy = C I - A B + D u + C I - A E + F p
6.- (a)
( )1
1 1 10
1lim ( ) lim limtt s s s
e s s s s sss
−− − −
→ →∞ →∞ →∞
⎛ ⎞= = = = =⎜ ⎟⎝ ⎠
A Φ I - A I - A I I
( ) ( )00diag diagt t t
te e e eλ λ→= ⇒ = = =A -1 A -1 -1T T T T TIT I
(b) ( ) ( )( ) ( ) ( )1 2 1 2 1 1diag diag diagt t t t t te e e eλ λ λ+ += = =A -1 -1T T T T
( ) ( )1 2 1 2diag diagt t t te e e eλ λ= = A A-1 -1T T T T (c)
( ) ( )( ) ( )11diag diagt t t te e e eλ λ−− − −= = =A -1 -1 AT T T T
(d) ( ) ( ){ } ( )( ){ } ( )( ){ } ( ){ }1 11 1-1 -1 -1 -1T TT Tt T Te s s s s
− −− −= = =A I - A I - A I - A I - AL L L = L
( ){ } ( ){ }1 1-1 -1 TT T T ts s e− −
= = AI - A I - AL L
(e) ( ) ( ) ( )diag diag diagt t te e eλ λλ= = =A -1 -1A AT T T T
( ) ( ) ( )diag diag diagt t te e eλ λλ= = =-1 -1 AT T T T A A (f)
( ){ } ( ){ }diag diagt t td d de e edt dt dt
λ λ= = =A -1 -1T T T T
( ) ( ) ( )diag diag diagt t te e eλ λλ= = =-1 -1 AT T AT T A 7.- (a) 0
kk→ =A I
(b) 1 2 1 2k T k T k T k T+ =A A A

(c) ( ) 1k k− −=A A
(d) ( ) ( )T kk T=A A
(e) k k=AA A A

Capitulo 5 Nivel Básico
1.-
(a) 2
1( )1
h ss
=+
(b) 1( )1
h ss
=+
(c) ( )5
sh ss
=+
(d) 10( )2
sh ss+
=+
(e) 2
1( )3
sh s es
−=+
(f) 10( )2
ss eh ss
−+=
+
(g) ( ) 0h z = (h) 1( )0.5
h zz
=+
(i) 1( )1.5
h zz
=+
(j) 2
1( )1.5
h zz
=+
(k) 2
5( )1.5zh z
z=
+ (l) 2
5 1( )1.5
zh zz
+=
+
2.-
(a) polos: 1,2ps j= ± ceros: no tiene.
(b) polos: 1 1ps = − ceros: no tiene.
(c) polos: 1 5ps = − ceros: 1 0zs =
(d) polos: 1 2ps = − ceros: 1 10zs = −
(e) polos: 1,2 3ps j= ± ceros: no tiene.
(f) polos: 1 2ps = − ceros: no tiene.
(g) polos: no tiene. ceros: no tiene.
(h) polos: 1 0.5pz = − ceros: no tiene.
(i) polos: 1 1.5pz = − ceros: no tiene.
(j) polos: 1,2 1.5pz j= ± ceros: no tiene.
(k) polos: 1,2 1.5pz j= ± ceros: 1 0zz =
(l) polos: 1,2 1.5pz j= ± ceros: 1 1 5zz = −
3.- (a)
( ) ( ) ( ) ( ) [ ] ( )0 1 0
, 1 01 0 1
t t u t y t t⎡ ⎤ ⎡ ⎤= + =⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
x x x
(b) ( ) [ ] ( ) [ ] ( ) ( ) [ ] ( )1 1 10, 1x t x t u t y t x t= − + + =
(c) ( ) [ ] ( ) [ ] ( ) ( ) [ ] ( ) [ ] ( )5 1 , 5 1x t x t u t y t x t u t= − + = − +
(d) ( ) [ ] ( ) [ ] ( ) ( ) [ ] ( ) [ ] ( )2 1 , 8 1x t x t u t y t x t u t= − + = +
(e)
( ) ( ) ( ) [ ] ( )0 1 0
( 1), 1 03 0 1
t t u t y t t⎡ ⎤ ⎡ ⎤= + − =⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
x x x
(f) No es posible definir una representación en variables de estado. (g) ( ) [ ] ( ) ( ) [ ] ( )0 , 1x kT T a x kT y kT x kT+ = − =

(h) ( ) [ ] ( ) [ ] ( ) ( ) [ ] ( )0.5 1 , 1x kT T x kT u kT y kT x kT+ = − + =
(i) ( ) [ ] ( ) [ ] ( ) ( ) [ ] ( )1.5 1 , 1x kT T x kT u kT y kT x kT+ = − + =
(j)
( ) ( ) ( ) ( ) [ ] ( )0 1 0
, 1 01,5 0 1
kT T kT u kT y kT kT⎡ ⎤ ⎡ ⎤+ = + =⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
x x x
(k)
( ) ( ) ( ) ( ) [ ] ( )2
0 1 0, 0 5
1,5 0 1kT T kT u kT y kT x kT⎡ ⎤ ⎡ ⎤
+ = + =⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦x x
(l)
( ) ( ) ( ) ( ) [ ] ( )2
0 1 0, 1 5
1,5 0 1kT T kT u kT y kT x kT⎡ ⎤ ⎡ ⎤
+ = + =⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦x x
4.-
(a) ( ) 242
h ss
=+
(b) ( ) ( )( )( )( )
3 45 2
s sh s
s s− −
=− −
(c) ( ) 202
sh ss+
=+
(d) ( ) 92
h zz
=+
(e) ( ) 2
13 4
h zz z
=+ +
(f) ( )2
2
3 53 4
z zh zz z+ +
=+ +
5.- (a) polos: 1 2ps = − ceros: no tiene.
(b) polos: 1 25, 2p ps s= = ceros: 1 23, 4z zs s= =
(c) polos: 1 2ps = − ceros: 1 20zs = −
(d) polos: 1 2pz = − ceros: no tiene.
(e) polos: 1,23 7
2pjz − ±
=
ceros: no tiene.
(f) polos: 1,23 7
2pjz − ±
=
ceros: 1,23 11
2pjz − ±
=
Nivel Intermedio 1.- (a) 1 25, 2λ λ= − = − (b) 1 25, 2λ λ= = (c) 1 25, 2λ λ= − = −
(d) 1 25, 2λ λ= − = − (e) 1,23 7
2jλ − ±
= (f) 1,23 7
2jλ − ±
=
2.- Los polos son un subconjunto de los valores propios. 3.- (a)

( ) ( ) ( ) ( ) ( )( ) ( ) ( )( )2 2cos 1 1 cos 1y kT T y kT T y kT u kT T u kT+ − + + = − + + (b) ( ) ( ) ( ) ( ) ( )1 1 11 10 1y kT T e y kT e u kT e− − −+ − = − + −
(c) ( ) ( ) ( ) ( )5y kT T e y kT u kT T u kT−+ − = + −
(d) ( ) ( ) ( ) ( ) ( )2 24 5y kT T e y kT u kT T e u kT− −+ − = + + −
(e)
( ) ( ) ( ) ( )( )( )
( ) ( )( )1 cos 3
3 2cos 3 23
y kT T y kT T y kT T u kT T u kT−
+ − + + + = + +
(f) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 2 2 42 2 4 5 5y kT T e y kT T u kT T e u kT T e e u kT− − − −+ − + = + + − + − +
4.- (a)
( ) ( ) ( ) ( ) [ ] ( )0.0496 0.0429 0.4323
, 4 100.0857 0.0925 0.8647
kT T kT u kT y kT kT⎡ ⎤ ⎡ ⎤+ = + =⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦x x x
(b)
( ) ( ) ( ) ( ) [ ] ( ) ( )101.4 47.01 20.72
, 0 194.02 54.4 17.53
kT T kT u kT y kT kT u kT⎡ ⎤ ⎡ ⎤+ = + = +⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦x x x
(c)
( ) ( ) ( ) ( ) [ ] ( ) ( )0.0496 0.0857 3.389
, 1 20.0429 0.0925 2.197
kT T kT u kT y kT kT u kT⎡ ⎤ ⎡ ⎤+ = + = +⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦x x x
5.- Para T = 1s.
(a) ( ) ( )0
1ln 0y t y ta⎛ ⎞′ + − =⎜ ⎟⎝ ⎠
(b) ( ) ( ) ( ) ( ) ( )2ln 2 ln 23
y t y t u t′ + − = −
(c) ( ) ( ) ( ) ( ) ( )22 2ln ln3 35y t y t u t′ + − = −
(d) ( ) ( ) ( ) ( )0.4054 2.5085y t y t y t u t′′ ′− + = (f)
( ) ( ) ( ) ( ) ( ) ( ) ( )0.4054 2.5085 0.7777 1.5180 1.6094 3.1416dy t y t y t j u t j u tdt
⎧ ⎫′′ ′− + = − − + −⎨ ⎬⎩ ⎭
6.- (a) ( ) ( ) ( ) ( ) ( )0.6931 3.1416 3 0.6931 3.1416y t j y t j u t′ − + = − +
(b) ( ) ( ) ( ) ( )1.3862 +6.3315 0.7914y t y t y t u t′′ ′− =

(c) ( ) ( ) ( ) ( ) ( ) ( )1.3862 6.3315 1.6094 5.9656y t y t y t u t u t u t′′ ′ ′′ ′− + = − +
Nivel Avanzado 4.-
Se sabe que: 2 2 3 3
0
12! 3! ! !
k kT k k
k
T T Te T Tk k
∞
=
= + + + + + + =∑A A A AI A A
Usando la expresión anterior y la definición de b , se puede obtener que la expansión en serie de Taylor de b es:
( )1
0
11 !
k k
k
Tk
∞+
=
=+∑b A b
Ahora se considera la matriz de ( ) ( )1 1n n+ × + :
0⎡ ⎤
= ⎢ ⎥⎣ ⎦
A bM
0
Se puede demostrar por inducción que; 1
0
k kk
−⎡ ⎤= ⎢ ⎥⎣ ⎦
A A bM
0
Usando estos resultados se llega a;
( )1 11
0 00 0
1 11 1 ! 1 !
1! ! 01
k k k kk kT k k k
k kk k
T Tk ke T T
k k
∞ ∞− +−∞ ∞
= == =
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥+= = = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎢ ⎥⎣ ⎦
∑ ∑∑ ∑MA A b A bA A b
M00
0
Capitulo 6 Nivel Básico
1.- (a) (b) (c)
10-1
100
101
102
103
-40-20
0h(ω)
10-1
100
101
102
1030
90
10-1
100
101
102
1030
10
20h(ω)
10-1
100
101
102
1030
90
10-1
100
101
102
1030
10
20h(ω)
10-1
100
101
102
1030
90
180
(d) (e) (f)
10-3
10-2
10-1
100
101
102
103-100
-50
0h(ω)
10-3
10-2
10-1
100
101
102
103
-90
0
10-3
10-2
10-1
100
101
102
103-100
0
100h(ω)
10-3
10-2
10-1
100
101
102
103
90180270
10-1
100
101
102
103
-40-20
0h(ω)
10-1
100
101
102
103-10000
-5000
0
(g) (h) (i)
10-1
100
101
102
103-200
0
200h(ω)
10-1
100
101
102
103
-270-180
-900
10-1
100
101
102
103-200
0
200h(ω)
10-1
100
101
102
103
-270-180
-900
10-2
10-1
100
101-100
0
100h(ω)
10-2
10-1
100
101
-180
(j)
10-2
10-1
100
101
102
-40-20
0h(ω)
10-2
10-1
100
101
102
-90
0
90
Nivel Avanzado
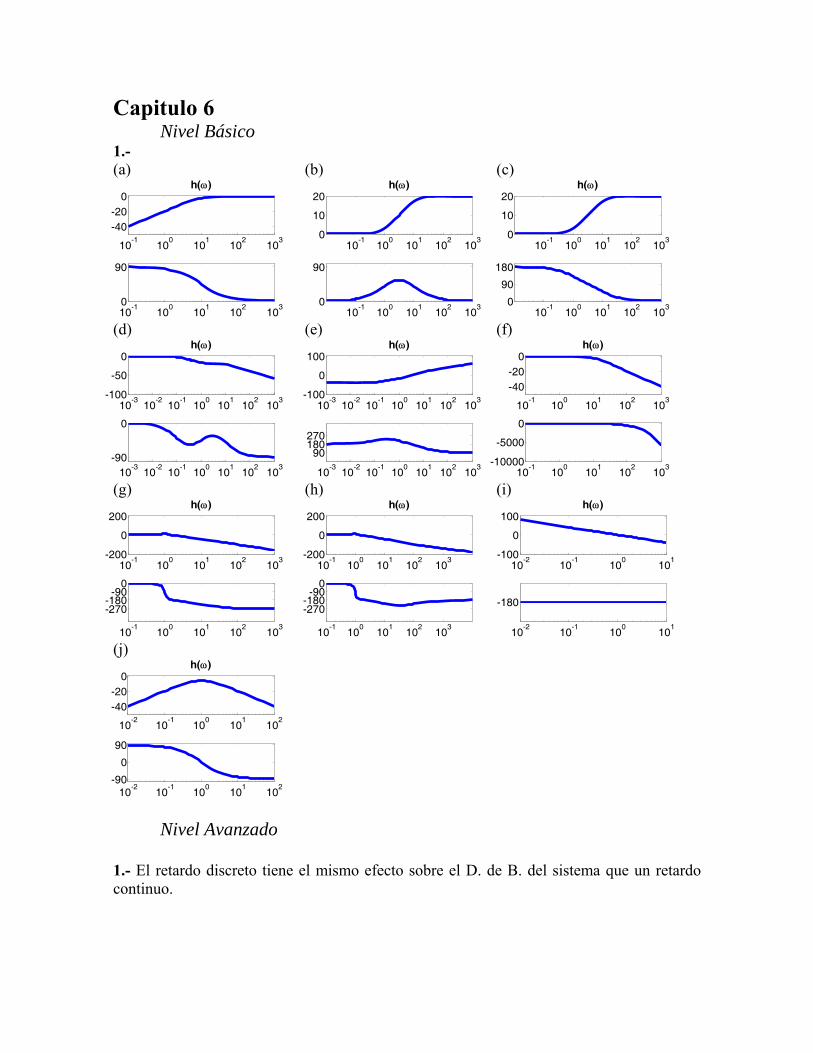
1.- El retardo discreto tiene el mismo efecto sobre el D. de B. del sistema que un retardo continuo.

2.- Para baja frecuencia: - Se desprecia la dinámica de los polos y/o ceros que no están en el origen, manteniendo la ganancia DC asociada a cada polo y/o cero. - En caso de existir retardo, éste se desprecia. Para alta frecuencia: - Todos los polos (ceros) de la función original se deben cambiar por polos (ceros) en el origen. . - En caso de existir retardo, éste se debe considerar. 3.- Para baja frecuencia: Para alta frecuencia:
( ) 1
1
1ml ln Nl l
zh s k
p s=
=
≈ ∏∏
( ) 1dt s
N m nh s k es
−+ −≈
4.- Caso continuo: El polinomio característico es ( ) 2
1 0p s s a s a= + + , para que las raíces estén en el SPI se debe cumplir que 0 10 y 0a a> > . Caso discreto: El polinomio característico es ( ) 2
1 0p z z a z a= + + , para que las raíces estén
en el dentro del círculo unitario se debe cumplir que 0 1a < y 1 01a a< + .

Capitulo 7 Nivel Básico
1.- (a) Sistema Estable. (b) Sistema Estable. (c) Sistema Estable. (d) Sistema Estable. (e) Sistema Estable. (f) Sistema Estable. (g) Sistema Estable. (h) Sistema Estable. (i) Sistema Inestable. (j) Sistema Estable.
2.-
(a) Sistema Marginalmente Estable. (b) Sistema Estable. (c) Sistema Estable. (d) Sistema Estable. (e) Sistema Marginalmente Estable. (f) Sistema Estable. (g) No se puede determinar. (h) Sistema Estable. (i) Sistema Inestable. (j) Sistema Inestable. (k) Sistema Inestable. (l) Sistema Inestable.
4.-
(a) Sistema internamente estable y estable entrada/salida. (b) Sistema internamente inestable e inestable entrada/salida. (c) Sistema internamente estable y estable entrada/salida. (d) Sistema internamente inestable e inestable entrada/salida. (e) Sistema internamente inestable e inestable entrada/salida. (f) Sistema internamente inestable e inestable entrada/salida.
5.- 1.- (a) 1 k− < < ∞ (b) [ ] [ ], 1 0.1,k U∈ −∞ − − ∞ (c) 0.01 k− < < ∞
(d) 1 k− < < ∞ (e) k−∞ < < ∞ (f) 1 1.04k− < < (g) 1 2k− < < (h) 1 2.08k− < <

(i) 0 k< < ∞ (j) 2 k− < < ∞
2.- (a) 1 k− < < ∞
(b) 1 k− < < ∞ (c) 1 k− < < ∞ (d) 0.2 k− < < ∞ (e) 3 36.31k− < < (f) 0.2 0.3562k− < < (g) No se puede determinar. (h) 1.5 0.5k− < < (i) 0.5 2.5k< < (j) 0.5 2.5k< < (k) Siempre es inestable. (l) Siempre es inestable.
3.- (a) 0.0833 k− < < ∞ (b) Siempre es inestable. (c) 0.1 k− < < ∞ (d) 0.333 0.111k− < < − (e) Siempre es inestable. (f) Siempre es inestable.
Nivel Intermedio 2.- Estabilidad Interna te⇒ A converge, si teA converge entonces teAc b también converge, con lo que se asegura estabilidad entrada/salida. 3.- Inestabilidad entrada/salida te⇒ Ac b diverge, si teAc b diverge necesariamente se debe a que teA diverge, por lo que el sistema es internamente inestable. 4.- Sí.
Nivel Avanzado 1.- No.
2.- [ ]2 0 0( ) ( ) ( ), ( ) 0 1 ( )
0 2 1t t u t y t t⎡ ⎤ ⎡ ⎤= + =⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
x x x
3.- Porque los coeficientes del polinomio característico son siempre reales, que es una propiedad de todos los sistemas que existen en la naturaleza. 4.- Sí. 5.- Sí.

Anexo A Nivel Básico
1.- (a) Objetivo: Flujo de salida.
21 11
1
1 2 3 22
2
22 33
3
10 10
10 8 5
8 10
F v hdhdt A
h h h hdhdt A
h h vdhdt A
−
−
+ −=
− − −=
− −=
25y x= (b) Objetivo: Posición vertical del automóvil.
( ) ( )( ) ( ) ( )
1 1 1 2 1 1 2
2 1 1 2 1 1 2 2 2 2
1
r
Mx k x x l d x x Mg u
mx k x x l d x x mg k x l y uy x
= − − − − − − +
= − − + − − − − − −
=
(c) Objetivo: Generación de tensión máxima. 2
2cel cel
p cd d k vdt dtθ θτ + =
( ) ( )1 2 10º 170ºaux sol cel aux sol cely v v k kθ θ θ θ= − = − − − − + + (d) Objetivo: Concentración de cloro de salida.
( )( )221 0.25 2ae c vf f k ghdh
dt h Hπ
+ −=
+ −
( ) ( )( ) ( )( )( )3 53 52 1 6 2 1 80 2s c c c s ae sdc f c f c f c
dt h H h H h Hπ
− −=
+ + + + +
sy c= (e) Objetivo: Voltaje de salida.
diSw e L vdt
dv vi Cdt R
y v
⋅ = +
= +
=
(f) Objetivo: Velocidad de carga.

( )
( )
1
aa a a a m m
mm a m r l
lr l l l
l
div R i L kdt
dk i J kdt n
dk J tdt
y
ω
ω θ θ
ωθ θ
ω
= + +
= + −
− = +
=
donde m md dtω θ= , l ld dtω θ= , m rnω ω= y m rnθ θ= . 2.- (a)
( )( )
( )
21 1
1
2 1 2 3 2 2
232 3 3
10 10
10 8 5
8 10
p u x Axx x x x x Ax x x u A
−
−
⎡ ⎤+ −⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥= − − −⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ − −⎢ ⎥⎣ ⎦
25y x= (b)
u py du fp
γ= + + += + +
x Ax b ecx
, donde
( )1 1
1 1 2
0 0 1 00 0 0 1
k M k M d M d Mk m k k m d m d m
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥− −⎢ ⎥− + −⎣ ⎦
A
00
11Mm
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥−⎣ ⎦
b
2
000
k m
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
e
1 1
1 1 2 2
00
k l M gk l m k l m g
γ
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥−⎢ ⎥+ −⎣ ⎦
[ ]1 0 0 0=c , [ ]0d = , [ ]0f =
(c)
u p
y du fp γ= + += + + +
x Ax b ecx
, donde
0 10 1 τ⎡ ⎤
= ⎢ ⎥−⎣ ⎦A
0
pk τ⎡ ⎤
= ⎢ ⎥⎣ ⎦
b [ ]2 0auxk= −c [ ]0d =00⎡ ⎤
= ⎢ ⎥⎣ ⎦
e [ ]2 auxf k= [ ]180 auxkγ = −
(d)

( )( )
( ) ( )( ) ( )( )( )
122
11
2 2 23 53 5
1 1 1
1 0.25 2
2 1 6 2 1 80 2
ae v
c ae
f u k gx
x Hxx uc ux f x
x H x H x H
π
π
⎡ ⎤+ −⎢ ⎥⎢ ⎥+ −⎡ ⎤ ⎢ ⎥=⎢ ⎥ ⎢ ⎥− −⎣ ⎦⎢ ⎥
+ + + + +⎢ ⎥⎣ ⎦
2y x= (e)
1 2 1
2 1
x x C x RCx u p L x L
−⎡ ⎤ ⎡ ⎤=⎢ ⎥ ⎢ ⎥⋅ −⎣ ⎦ ⎣ ⎦
1y x= (f)
u py du fp= + += + +
x Ax b ecx
, donde
20 0 10 0 0
0 00 0
m m m
l
m a a a
n J k nJk J
k knk L R L
⎡ ⎤−⎢ ⎥⎢ ⎥=⎢ ⎥−⎢ ⎥− −⎢ ⎥⎣ ⎦
A
000
1 aL
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
b
0100
lJ⎡ ⎤⎢ ⎥−⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
e [ ]0 1 0 0=c , [ ]0d =
, [ ]0f = 3.- (a)
( )22 21
2 22
1 2 4 23
10 10
4 1014 10 1064
o o o
o o
o o o
x p u
x p
x p u
− −
−
− −
= +
= ⋅
= ⋅ −
(b)
1 11 2 1
1 2 2 2 1
1 1 2 22
2
3
2
2
0
oo o
o o
o
uk lgM gm gMp l lk k k k k
gm k l k l gMpk
ξ
ξ
ξ
= − − + + + + +
− − += −
=

(c)
1
2
cte0
o
o
xx
==
No es posible determinar el valor exacto de x1o pues para un voltaje de entrada vc constante el ángulo de la celda será un valor constante indeterminado, es decir, existen infinitas soluciones.
(d)
( )2
1 2
2
o aeo
v
o co
o ae
u fx
gku cx
u f
+=
=+
0 1 2 32
3
4
x1o
103·uo
h [
m]
0 1 2 30
1
2
3
103·x2o
103·uo
c s
(e)
1
2
o o o
o oo
x u pu px
R
= ⋅⋅
=


















