Software RT PPP - PPP Online Descrição e Manual de...
16
Manual do RT_PPP online Software RT_PPP - PPP Online Descrição e Manual de Uso Haroldo Antonio Marques Bruno Vani / Rogério Oyama João Francisco Galera Monico 2015
-
Upload
trinhtuyen -
Category
Documents
-
view
213 -
download
0
Transcript of Software RT PPP - PPP Online Descrição e Manual de...

Manual do RT_PPP online
Software RT_PPP - PPP Online
Descrição e Manual de Uso
Haroldo Antonio Marques
Bruno Vani / Rogério Oyama
João Francisco Galera Monico
2015

Manual do RT_PPP online
Sumário
1. Introdução .................................................................................................... 3
2. Principais características do RT_PPP ......................................................... 3
3. Utilização do RT_PPP online ....................................................................... 6
4. Resultados gerados pelo RT_PPP .............................................................. 8
5. Considerações Finais ................................................................................ 12
Bibliografia........................................................................................................ 13

Manual do RT_PPP online
1. Introdução
O software RT_PPP assim denominado para designar Real Time PPP foi
desenvolvido na FCT/UNESP (Faculdade de Ciências e Tecnologias da Universidade
Estadual Paulista - SP) na tese de doutorado desenvolvida por Marques (2012) com o
objetivo de realizar PPP em tempo real. Apesar de ser desenvolvido visando aplicação
em tempo real, há uma versão disponível para o modo PPP pós-processado, a qual
atualmente se encontra inserida no PPP online disponível para toda a comunidade
usuária.
O software RT_PPP permite processar observações de código e fase (L1 e
L2) GPS no modo PPP e dispões de várias opções de processamento, dentre as quais
se destacam diferentes formas de corrigir os erros provocados pela troposfera e
ionosfera. O software foi desenvolvido em linguagem de programação C/C++ e os
processamentos podem ser realizados no modo época por época, estático ou
cinemático utilizando o Filtro de Kalman com aplicação do controle de qualidade a
partir do método DIA (Detecção, Identificação e Adaptação) (TEUNISSEN, 1998;
MACHADO, 2001; MONICO, 2008).
O sistema online pode ser acessado através do endereço de internet <
http://is-cigala-calibra.fct.unesp.br/ppp/index.php >, onde o usuário tem à disposição
uma interface com diversas opções de processamento, sendo possível, por exemplo,
enviar seu arquivo RINEX ou até mesmo realizar PPP para uma determinada estação
pertencente à RBMC (Rede Brasileira de Monitoramento Contínuo).
É importante destacar que o processamento com o RT_PPP online requer
conhecimentos técnicos específicos por parte do usuário, visto que este deverá
escolher entre as diversas opções, tal como, a utilização somente de medidas
derivadas do código CA, ou CA juntamente com P2 ou medidas de código e fase. Se
escolher somente CA, por exemplo, não é possível aplicar a combinação ion-free (livre
da ionosfera) para eliminar o atraso da ionosfera, logo, o modelo de Klobuchar ou um
Mapa Global da Ionosfera (GIM – Global Ionosphere Map) poderá ser aplicado.
A próxima seção descreve as principais características do software RT_PPP
e em seguida é apresentada a forma de utilização e resultados disponibilizados aos
usuários.
2. Principais características do RT_PPP
O RT_PPP permite processar com as medidas GPS P1, P2 e fases na L1 e
na L2, porém, quando P1 ou P2 não estão disponíveis devido a configurações ou

Manual do RT_PPP online
restrições dos receptores, o RT_PPP utiliza C1 ou L2C, aplicando as correções de
DCBs (Differential Code Bias) para compatibilizar as medidas com P1 e P2 (DACH et
al., 2007).
As principais modelagens matemáticas para eliminar ou minimizar os efeitos
sistemáticos nos sinais GPS são mostradas na Tabela 1:
Tabela 1 - Modelagem matemática implementada no software RT_PPP
Efeito Estratégia
Ionosfera – 1a ordem Combinação ion-free
Estimativa da ionosfera como processo estocástico
Troposfera
Somente modelo de Hopfield + GPT
GMF + TZD a partir de dados do CPTEC
VMF1 + TZD a partir de dados ECMWF
TZH fixo + TZW estimado (random walk)
Carga de marés oceânicas Aplicada
Marés de corpos terrestres Modelos descritos pelo IERS 2003 (McCARTHY; PETIT,
2003)
PCV receptor e satélite Variação absoluta do centro de fase das antenas (PCO e
PCV)
Efemérides precisas Órbita final IGS
Correção do erro do relógio do
satélite Pós-processado (taxa de 30 segundos)
Differential Code Bias (DCB) Valores mensais estimados pelo CODE
Ambiguidades Solução float
Fase wind-up Aplicado
Efeito de relatividade Aplicado
A correção dos efeitos da ionosfera pode ser feita através da combinação ion-
free para o caso de dupla frequência ou da estimativa do efeito ionosférico na direção
receptor-satélite, modelo de Klobuchar ou mapas globais (GIM) para o caso de
simples frequência. Ao se aplicar a estimativa da ionosfera, o valor aproximado
adotado para o parâmetro ionosfera advém do modelo de Klobuchar e a estimativa é
realizada com base na introdução de uma pseudo-observação para cada satélite e
respectivo desvio-padrão adotado pelo usuário. O parâmetro da ionosfera, nesse caso,
é tratado como white noise (ruído branco) no Filtro de Kalman, de forma que no início
de cada época reinicializa-se a Matriz de Variância e Covariância (MVC) do vetor
estado predito referente ao parâmetro da ionosfera.
Com relação aos efeitos da troposfera, é possível aplicar as correções
através do modelo de Hopfield, a utilização do modelo de Previsão Numérica do
Tempo (PNT) do CPTEC (Centro de Previsão de Tempo e Estudos Climáticos),
modelo de PNT Europeu (ECMWF - European Centre for Medium-Range Weather
Forecasts) juntamente com função de mapeamento de Viena (VMF – Vienna Mapping

Manual do RT_PPP online
Function) ou a estimativa da troposfera (SAPUCCI, 2001; MONICO, 2008; BOEHM;
SCHUH, 2004).
Para a correção da troposfera utilizando o modelo de Hopfield, adotam-se
parâmetros de pressão e temperatura como entrada para o modelo, os quais são
calculados a partir da função GPT (Global Pressure and Temperature), disponível em:
http://ggosatm.hg.tuwien.ac.at/DELAY/SOURCE/ (Acesso em: mar. 2015).
Com relação à estimativa de parâmetros da troposfera, estima-se a
componente úmida da troposfera (Tzw) tratando-a como um processo estocástico
random walk, sendo que a componente hidrostática é calculada com base em um
modelo (Hopfield ou PNT) e é mantida fixa durante todo o processamento.
Para a modelagem estocástica é possível utilizar os modelos em função do
ângulo de elevação do satélite conforme descritos em Silva (2009). A variação do
centro de fase (PCV – Phase Center Variation) da antena do receptor e do satélite é
corrigida utilizando a correção com base em calibração absoluta. Outras correções se
referem às da fase windup, modelos de marés terrestres e oceânicas, correção devido
aos efeitos de relatividade, entre outros. (STRANGE; BORRE, 1997;
McCARTHY;PETIT, 2003; LEICK, 2004; SEEBER, 2003; KOUBA, 2009;)
Descrição mais detalhada sobre o método PPP e modelos matemáticos a
serem aplicados para correção de efeitos sistemáticos nas medidas GPS podem ser
encontrados na literatura especializada sobre Geodésia por satélites.

Manual do RT_PPP online
3. Utilização do RT_PPP online
Ao acessar a página http://is-cigala-calibra.fct.unesp.br/ppp/index.php o
usuário terá acesso a pagina principal do PPP online, onde se tem diversas opções de
processamento, como pode ser visto na Figura 3.1.
Figura 3.1 - Pagina principal do RT_PPP online

Manual do RT_PPP online
No caso do exemplo apresentado na Figura 3.1, o usuário pode
primeiramente escolher entre processar seu arquivo RINEX ou dados GPS de uma
estação da RBMC. Ao escolher a segunda opção, basta escrever o acrônimo da
estação RBMC, seguido do ano e dia do ano. No exemplo em questão foi escolhida a
estação PPTE (Presidente Prudente - SP) para o dia 100 do ano de 2014.
Na opção observáveis, o usuário pode escolher usar somente código, ou
código e fase na L1 e na L1 e L2. É necessário saber que ao usar somente C/A ou C/A
e fase L1 não é possível, por exemplo, aplicar a combinação ion-free.
É possível ainda escolher entre o uso de efemérides precisas ou transmitidas,
usar ou não as correções precisas de relógios dos satélites e estimar ou aplicar
modelos de correção da troposfera. O usuário pode escolher as épocas que deseja
processar, onde se tem a época inicial e a final. No caso de uma coleta de 24 horas
com taxa de coleta de 15 segundos, tem-se aproximadamente 5760 épocas de dados.
Na opção de coordenadas de referência podem-se inserir as coordenadas
conhecidas da estação, as quais serão utilizadas para comparar com as coordenadas
estimadas. Neste caso se forem utilizadas coordenadas no sistema de referência
SIRGAS2000 (época 2000,4) ou outro sistema moderno, é possível informar as
velocidades da estação e respectiva época de referência para atualização das
coordenadas para a época do processamento. É importante dizer que ao utilizar
efemérides precisas, as coordenadas da estação estimadas estarão referenciadas a
um dos ITRFs, atualmente, o ITRF2008. Desta forma, para fins de análises é
interessante utilizar coordenadas de referência advindas da rede SIRGAS-CON, a qual
contém soluções semanais no ITRF vigente. Quando não se conhece as coordenadas
de referência, que se trata da maioria dos casos para aplicações práticas, pode-se
deixar as coordenadas em branco.
Os dados GPS podem ser processados no PPP modo estático, cinemático ou
época por época. No modo estático, os dados são processados de forma acumulativa
no Filtro de Kalman, ou seja, em cada época utiliza-se o vetor estado predito e sua
MVC juntamente com as medidas da época para estimativa atual dos parâmetros.
Quando se realiza o processamento no modo cinemático, considera-se que o receptor
GPS está em movimento (coordenadas variando em cada época), contudo, as
ambiguidades e outros parâmetros são estimados de forma acumulativa,
proporcionando a estimativa mais precisa das coordenadas. No caso de solução PPP
época por época, os dados são processados independentemente em cada época, ou
seja, na época atual do processamento, não se faz uso de informações advindas de
épocas anteriores.

Manual do RT_PPP online
A aplicação comumente para o PPP envolve o uso de medidas de código e
fase na L1 e L2 com aplicação da combinação ion-free, estimativa da troposfera como
random walk, uso de efemérides precisas e correções dos relógios dos satélites,
aplicação de PCVs e outras correções como descritas na Tabela 1. Os resultados
gerados pelo RT_PPP online são disponibilizados em forma de arquivos e gráficos, os
quais são brevemente descritos na próxima seção.
4. Resultados gerados pelo RT_PPP
Após o usuário pressionar o botão processar na interface principal do
RT_PPP online (ver Figura 3.1), o processamento automático dos dados é realizado e
após alguns instantes, uma página com os arquivos de resultados é disponibilizada
como exemplificado na Figura 4.1.
Figura 4.1 - Pagina principal do RT_PPP online
Como pode ser visto na Figura 4.1, são disponibilizados os seguintes
arquivos:
Arquivo.inp - arquivo de entrada para o RT_PPP com as informações
escolhidas pelo usuário;
Arquivo.out – contém resultados gerados pelo software em cada época, tal
como: coordenadas estimadas, precisões, erros no SGL (Sistema Geodésico
Local), estimativa da troposfera, entre diversas outras informações;

Manual do RT_PPP online
Arquivo.sum – Exibe um sumário do processamento com as opções aplicadas
no processamento e resultados finais para o caso de posicionamento estático
ou em cada época para o caso de cinemático.
Log do servidor – contém informações relacionadas ao servidor de internet e
do processamento realizado pelo software;
Relatório – exibe informações de sumário e gráficos gerados automaticamente,
tais como discrepância no SGL, Precisões, Troposfera estimadas, gráfico de
LOM (Local Overall Model), entre outros.
Um exemplo real de processamento foi realizado para o dia 100 de 2014 na
estação PPTE e o arquivo de sumário pode ser visto Figura 4.2.
Figura 4.2 – Arquivo de sumário gerado pelo RT_PPP online
No exemplo apresentado com sumário na Figura 4.2, verifica-se que o
processamento foi no modo PPP estático, com aplicação da ion-free, estimativa da
troposfera (5 mm/raiz da hora), aplicação de órbitas precisas e correções dos relógios

Manual do RT_PPP online
dos satélites. As épocas de processamento foram de número 1 até 5700 (0 h até
aproximadamente 23:45 h do dia). A máscara de elevação foi de 10 graus e no modelo
estocástico foi aplicado ponderação em função do inverso do seno do ângulo de
elevação. Foram aplicadas correções de marés terrestres e oceânicas, DCBs,
correções de PCVs, entre outras.
As coordenadas cartesianas estimadas e suas precisões são apresentadas no
ITRF2008 (IGS08), além dos ‘erros’ e/ou discrepâncias no SGL juntamente com a
precisão propagada. No caso, os erros após um dia de processamento foram de 0,003
m, 0,006, e 0,029 m, respectivamente para as componentes E, N e Up do SGL.
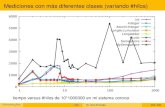
Os gráficos com a série temporal diária dos erros, precisões, estimativa do
atraso da troposfera também podem ser visualizados e alguns exemplos são
mostrados a seguir:

Manual do RT_PPP online
Figura 4.3 – Gráficos gerados pelo RT_PPP online (PPP estático PPTE – dia 100 de 2014)

Manual do RT_PPP online
5. Considerações Finais
Este manual teve como principal objetivo apresentar o sistema de PPP online
disponível em <http://is-cigala-calibra.fct.unesp.br/ppp/index.php>, o qual faz uso do
software RT_PPP desenvolvido por Marques, H. A (2012) numa tese de doutorado na
FCT/UNESP sob orientação do Professor Dr. João F. G. Monico. Foram apresentadas
as principais características do software e opções de processamento, além de
informações do uso do sistema de PPP online. Um exemplo prático foi apresentado
com processamento no modo PPP estático para a estação PPTE no dia 100 de 2014 e
os resultados podem ser vistos na seção 4.
O sistema está disponível gratuitamente à comunidade usuária sendo
importante enfatizar que o software possui características acadêmicas e científicas, se
encontra em fase de desenvolvimento e não foi projetado para fins comerciais ou
operacionais, de forma que os autores não podem ser responsabilizados por
quaisquer falhas ou problemas ocorridos na sua utilização ou advindas dos resultados
obtidos. O retorno por parte dos usuários na ocorrência de problemas na etapa de
processamento dos dados GPS é fundamental para o aprimoramento do serviço.
Agradecimentos
Os autores agradecem à FAPESP (Processo: 2007/08687-4) pelo apoio em
forma de bolsa de doutorado, ao Programa de Pós-Graduação em Ciências
Cartográficas da FCT/UNESP, ao CNPQ pelo apoio atualmente em forma de projeto
Universal (Processo: 475775/2013-9) e ao projeto Cigala/Calibra financiado pela
comunidade Europeia (FP7–GALILEO–2011–GSA–1a)

Manual do RT_PPP online
Bibliografia
ASHBY, N.; SPILKER JR, J.J. Introduction to Relativistic Effects on the Global Positioning System. In PARKINSON, B.W.; SPILKER JR, J.J. Global Positioning System: Theory and Applications, Washington: American Institute of Aeronautics and Astronautics, 1996. vol. 1, Cap. 18, p. 623–697.
BKG, Federal Agency for Cartography and Geodesy .Disponível em: <http://software.rtcm-
ntrip.org/export/HEAD/ntrip/trunk/BNS/bnshelp.html#rtcm3>. Acesso em jan. 2012. BLEWITT, G. An automated editing algorithm for GPS data.Geophys. Res. Lett., v. 17, n. 3, p.
199-202, mar. 1990. BLUNT, P. Advanced Global Navigation Satellite System Receiver Design.2007. 223 f.
PhD. Thesis, University of Surrey, England, UK, 2007. BOEHM, J.; SCHUH, H. Vienna Mapping Functions in VLBI Analyses. Geophys. Res. Lett.
2004. 31, L01603, doi:10.1029/2003GL018984. BOEHM, J.; WERL, B.; SCHUH, H. Troposphere mapping functions for GPS and very long
baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data, J. Geophys. Res. 2006. 111, B02406, doi: 10.1029/2005JB003629.
BORRE, K.; AKOS, D. M; BERTELSEN, N.; RINDER, P.; JENSEN, S. H.A software-defined
GPS and Galileo receiver.1.ed. Boston: Birkhäuser, 2007. 176p. BROWN, R. G.; HWANG, P. Y. C. Introduction to Random Signals and Applied Kalman
Filtering: With Matlab exercises and solutions. 3. ed. Canada: John Wiley & Sons, Inc., 1997. v.3.
CAMARGO P. O. Controle de qualidade aplicado ao Filtro de Kalman, Curitiba, 1992. 94 p.
Dissertação (Mestrado) – Setor de Tecnologia, Universidade Federal do Paraná, Curitiba.
______. Modelo regional da ionosfera para uso em receptores de uma freqüência. 1999.
191 f.Tese (Doutorado em Ciências Geodésicas) – Setor de Ciências da Terra, Universidade Federal do Paraná, Curitiba.
CIRAOLO, L.; AZPILICUETA, F.; BRUNINI, C.; MEZA, A.; RADICELLA, S. M. Calibration errors
on experimental slant total electron content (TEC) determined with GPS. Journal of Geodesy. v. 81, n. 2, p. 111-120, fev. 2007.
COSTA, S. M. A.; LIMA M. A. A.; MOURA JR., N. J.; ABREU, M. A.; FORTES, L. P. S. RBMC
em tempo real, via NTRIP, e seus benefícios nos levantamentos RTK e DGPS. In: II Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação, 2008. Recife - PE. Anais... Recife-PE: UFPE, 2008.
DACH, R. et al. (Ed.). Bernese GPS software version 5.0: user manual. Astronomical Institute,
University of Bern, 2007. DAVIES, K. Ionospheric radio. London: Peter Peregrinus Ltd., 1990. 580p. GELB, A.; KASPER JR., J. F.; NASH JR., R. A.; PRICE, C. F.; SUTHERLAND JR., A. A.
Applied optimal estimation. Cambridge, Massachusetts: The M.I.T. Press, 1974. 374p. GEMAEL C. Introdução ao ajustamento de observações: Aplicações Geodésicas. Curitiba,
PR: UFPR, 1994. 319 p.

Manual do RT_PPP online
GENG, J.; TEFERLE, F N; MENG, X.; DODSON, A H. Towards PPP-RTK: Ambiguity resolution in real-time precise point positioning. Advances in Space Research, 2011.v.47, p. 1664-1673.
GOAD, C. Surveying with the Global Positioning System.In PARKINSON, B. W.; SPILKER JR.,
J. J. Global Positioning System: Theory and applications. Washington: American Institute of Aeronautics and Astronautics, 1996. v. 2, Cap. 18, p.501-517.
HAN, S. C.; KWON, J. H.; JEKELI, C. Accurate absolute GPS positioning through satellite clock
error estimation.Journal of Geodesy. v. 75, p. 33-43, 2001. HAUSCHILD, A. Precise GNSS Clock-Estimation for Real-Time Navigation and Precise
Point Positioning. 2010. PhD Thesis - Technical University of Munich. Munique, Alemanha. 2010.
HOFMANN-WELLENHOF, B.; LICHTENEGGER, H.; COLLINS, J.Global Positioning
System:theory and practice. 5.ed. New York: Springer-Verlag, 2001. 382p. HOFMANN-WELLENHOF, B.; LICHTENEGGER, H.; WASLE, E.GNSS-Global Navigation
Satellite Systems: GPS, GLONASS, GALILEO & more. New York: Springer-Verlag, 2008. 516p.
IBGE - Rede Brasileira de Monitoramento Contínuo dos Sistemas GNSS. Disponível em:
<http://www.ibge.gov.br/home/geociencias/geodesia/rbmc/ntrip/>. Acesso em: jan. 2012. INCRA. Norma técnica para georreferenciamento de imóveis rurais. 2. ed.Brasília.ago.
2010. IGS - International GNSS Service. Disponível
em:<http://igscb.jpl.nasa.gov/components/prods.html>. Acesso em: Jan. 2011. IGS Mail # 5078 (2004). P1C1. Disponível em:
<http://igscb.jpl.nasa.gov/mail/igsmail/2005/msg00001.htm>. Acesso em: set. 2009. KALMAN, R. E. A new approach to linear filtering and prediction problems. Transactions of the
ASME –Journal of Basic Engineering, v.82, p.35-45, 1960. KAPLAN, E. D. Understanding GPS: principles and applications. 2 ed. Boston: Artech House,
Inc., 1996. 554p. KLOBUCHAR, J. A. Ionospheric effects on GPS. In: PARKINSON, B. W.; SPILKER JUNIOR, J.
J. Global Positioning System: theory and applications. Wahington, Dc: American Institute of Aeronautics and Astronautics, Inc, 1996. Cap. 12, p. 485-515.
KOUBA, J. A guide to using International GNSS Service (IGS) products.Geodetic Survey
Division; Natural Resources Canadá, 2009. Disponível em: <acc.igs.org/UsingIGSProductsVer21.pdf>. Acesso em: out. 2009.
LANGLEY, R.B. Propagation of the GPS signals. In: TEUNISSEN, P. J. G.; KLEUSBERG, A.
GPS for Geodesy. 2. ed. Berlin: Springer-Verlag, 1998. cap.3, p.111-149. LEICK, A. GPS satellite surveying.New York: John Wiley & Sons, 1995. 560p. ______. GPS satellite surveying. 3rd. ed.: New York: John Wiley & Sons, 2004. 435p. LIU, G. C. Ionosphere weighted global positioning system carrier phase ambiguity
resolution. 2001 157 f. M.Sc. dissertation.Department of Geomatics Engineering - The University of Calgary, Calgary, Alberta, Canada.
MACHADO, W. C. Solução rápida das ambigüidades GPS para aplicações no
posicionamento relativo de linhas de base curtas. 2001. 121 f. Dissertação (Mestrado

Manual do RT_PPP online
em Ciências Cartográficas) - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente, 2002.
MARQUES, H. A. Influência da ionosfera no posicionamento GPS: estimativa dos resíduos
no contexto de duplas diferenças e eliminação dos efeitos de 2ª e 3ª ordem. 2008. 151 f. Dissertação (Mestrado em Ciências Cartográficas) - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente. 2008.
MARQUES, H. A. PPP em tempo real com estimativa das correções dos relógios dos
satélites no contexto de redes GNSS. 245 f. Tese (Doutorado em Ciências Cartográficas) - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente. 2012.
MARQUES, H. A.; MONICO, J. F. G.; AQUINO, M. RINEX_HO: second- and third-order
ionospheric corrections for RINEX observation files. In: GPS Solutions. Springer-Verlag, V. 15 p. 305–314, DOI: 10.1007/s10291-011-0220-1, 2011.
MATSUOKA, M. T. Influência de diferentes condições da ionosfera no posicionamento
por ponto com GPS: Avaliação na região Brasileira. 2007. 263 f. Tese (Doutorado em Ciências Cartográficas) - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente. 2007.
McCARTHY D. D.; PETIT G.IERS Conventions (2003), IERS Technical Note 32, Central
Bureau of IERS- Observatorie de Paris. MONICO, J. F. G.Posicionamento pelo GNSS: descrição, fundamentos e aplicações. 2. ed
São Paulo: Unesp, 2008. 476p. ODIJK, D. Fast precise GPS positioning in the presence of ionospheric delays. 2002. 242
f. PhD dissertation, Faculty of Civil Engineering and Geosciences, Delft University of Technology, Delft. 2002.
PRESS, H. W.; FLANNERY, B. P.; TEULOSKY, S. A.; VETTERLING, T. W. Numerical
Recipes: The Art of Scientific Computing.New York: Cambridge University Press. 1986. 818p.
ROPER, E. GPS Status and Modernization.In: Munich Satellite Navigation Summit, 2010.
Munique, Alemanha, 2010. RTCM.RTCM recommended standards for differential GNSS (Global Navigation Satellite
Systems Service). Version 3.1.Radio technical commission for maritime services, Virginia. 2007.
RTPPP - IGS Real Time Pilot Project.Disponível em: <http://www.rtigs.net>. Acesso em: jan.
2012. SAPUCCI, L. F. Estimativa do vapor d'água atmosférico e avaliação da modelagem do
atraso zenital troposférico utilizando GPS. 2001. 167 f. Dissertação (Mestrado em Ciências Cartográficas) - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente. 2001.
______. Estimativas do IWV utilizando receptores GPS em bases terrestres no
Brasil:sinergia entre Geodésia e Meteorologia. 2005. 200 f. Tese (Doutorado em Ciências Cartográficas) - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente.2005.
SCHMID, R.; STEIGENBERGER, P.; GENDT, G. GE, M. ROTACHER, M. Generation of a
consistent absolute phase center correction modelfor GPS receiver and satellite antennas.Journal of Geodesy. v. 81, p. 781-798, 2007.

Manual do RT_PPP online
SEEBER, G. Satellite geodesy: foundations, methods, and applications.2. ed. Berlin, New York: Walter de Gruyter, 2003. 589p.
SILVA, H. A. Avaliação de modelos estocásticos no posicionamento GNSS. 2009. 108 f.
Dissertação (Mestrado em Ciências Cartográficas) - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente. 2009.
SILVA, H. A.; MONICO, J. F. G. Integração de Linguagens de Programação. Estágio não-
obrigatório, - Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente, 2004.
SOLER, T..A compendium of transformation formulas useful in GPS work, Journal of
Geodesy, 72(7-8), 482-490, (1998). STRANG, G.; BORRE, K. Linear algebra, geodesy and GPS. Wellesley-Cambrigde Press,
1997, 624p. TEUNISSEN, P. J. The GPS phase-adjusted pseudorange. In: Proceedingsof the Second
International Workshop on High Precision Navigation, Stuttgart, Freudenstadt, nov. 1991, p. 115-125.
______. Quality control and GPS. In: TEUNISSEN, P. J. G.; KLEUSBER, A. GPS for Geodesy,
2. ed. Berlin: Springer-Verlag, 1998. p.271-318. ______. Dynamic data processing: Recursive least-squares. Delft University Press, 2001. WANG, J. Modelling and quality control for precise GPS and GLONASS satellite
positioning. 1999. 171 p. PhD Thesis - School of Spatial Sciences, Curtin University of Technology.