
Soccer Playing Robots - uni-hamburg.de · • Localization • Locomotion • Coordination •...
18
25.01.2010 Soccer-Playing Robots Stehle/Zelewski Presented by: Michael Zelewski and Tilmann Stehle Soccer Playing Robots Soccer Playing Robots
Transcript of Soccer Playing Robots - uni-hamburg.de · • Localization • Locomotion • Coordination •...

25.01.2010 Soccer-Playing RobotsStehle/Zelewski
Presented by:Michael Zelewski
andTilmann Stehle
Soccer Playing RobotsSoccer Playing Robots
25.01.2010 Soccer-Playing Robots Stehle/Zelewski
ContentContent
• Definition• Motivation• RoboCup• Challenges• Future of robot soccer

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
DefinitionDefinition
In robot soccer (partly) autonomous, intelligentagents play soccer against each other, while the
rules are assimilated to the FIFA standards.

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
MotivationMotivation
• Test environment for latest technologies• Education• Success in robot soccer as a sign of good
technology• Fun encourages people to research and
develop robot technologies

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Five categories• Simulation• Small size
• Middle size• Standard Platform
• Humanoid
RoboCupRoboCupThe world championship in robot soccerThe world championship in robot soccer
25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Simulation
• 22 virtual robots• Central simulation server• Client-server-system• Server provides information depending on
the client status• Clients can move their simulated robots by
predefined commands

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Small size robot league
• Two teams of 5 Robots each
• Maximum robot dimensions:– diameter: 180mm– height: 15cm
• Field dimensions:4.05m x 6.05m
• Global vision• Off-field PC

25.01.2010 Soccer-Playing Robots Stehle/Zelewski

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Middle Size League
• Two teams of up to 6 robots each• Maximum cross section: 50cm• Field: 18m x 12m• On-board vision• Different Sensors• Fully autonomous action
25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Humanoid League
• Human-like body and senses• Division into three classes:
– KidSize(30-60cm)– TeenSize(100-130cm)
– AdultSize(130cm and taller)
• Communication via WLAN

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Bruno
• Height: 57cm• Weight: 3300g
• 21 DOF• Head camera
• Accelerometer• Gyroscope
• Joint angle encoders

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Standard PlatformLeague
• Same hardware for both Teams
• Focus on software development (AI)
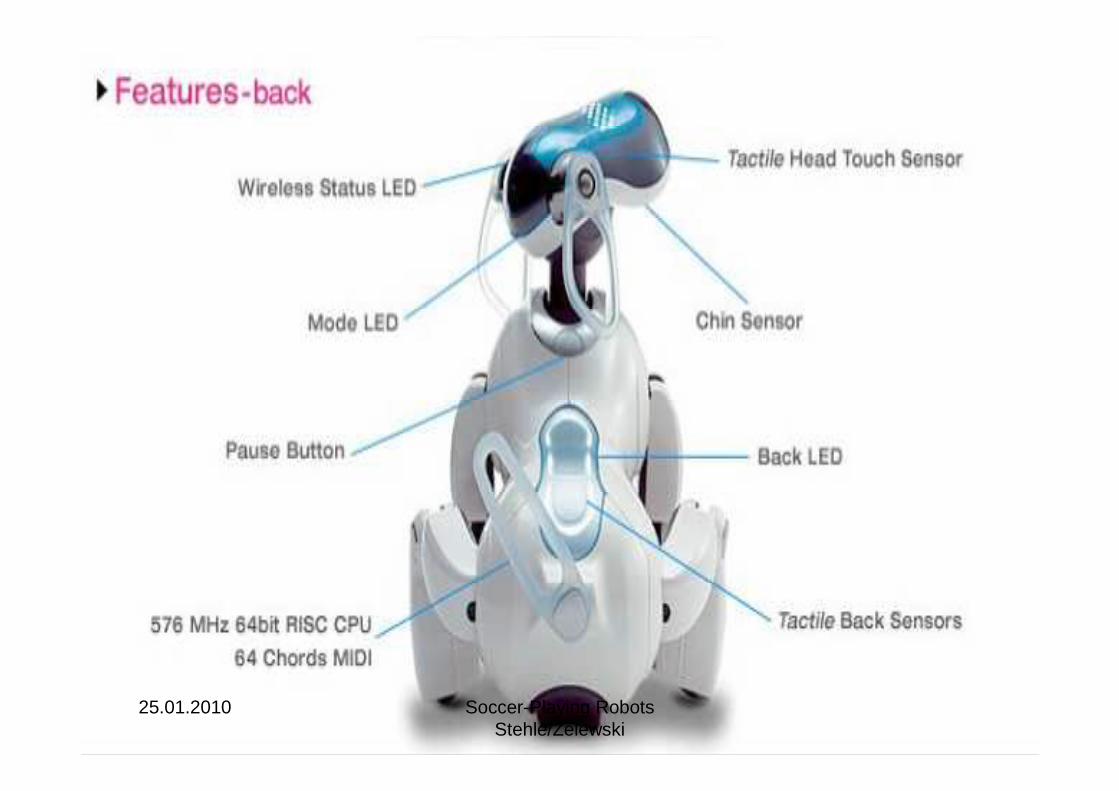
• Standard Platform until 2008: Aibo
• Now: NAO, Humanoid

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
25.01.2010 Soccer-Playing Robots Stehle/Zelewski

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
NAO

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
ChallengesChallenges
• Vision/Object recognition• Localization• Locomotion• Coordination• Communication
25.01.2010 Soccer-Playing Robots Stehle/Zelewski
Future of robot soccer
• RoboCup 2010: Singapore• RoboCup will go on taking place• Increasing budgets• Tournaments will accustom people to
robots• Aim: 2050 win against the current world
champion team in soccer

25.01.2010 Soccer-Playing Robots Stehle/Zelewski
20502050


















