Smoothing and Weighted Average Techniques · 2017. 12. 23. · weighted average of orthogonal local...
30
Smoothing and Weighted Average Techniques Shreyan Ganguly, Jeffrey Gory, Meng Li, Matt Pratola, and Angela Dean October 28, 2014 SSES Reading Group Smoothing and Weighted Averages October 28, 2014 1 / 30
Transcript of Smoothing and Weighted Average Techniques · 2017. 12. 23. · weighted average of orthogonal local...

Smoothing and Weighted Average Techniques
Shreyan Ganguly, Jeffrey Gory, Meng Li,Matt Pratola, and Angela Dean
October 28, 2014
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 1 / 30

General Overview
Non-Stationarity
Second order stationarity implies that the covariance structurebetween two distinct points in the spatial domain is only afunction of the distance between them
Under the assumption of non-stationarity, this is not the case
One method of estimating the covariance structure of anon-stationary spatial process is with smoothing or weightedaverage techniques
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 2 / 30

General Overview
Notable Papers
Fuentes (2001) represented a non-stationary spatial process as aweighted average of orthogonal local stationary processes
Fuentes and Smith (2001) extended this idea to a continuousconvolution of local stationary processes
Kim, Mallick, and Holmes (2005) proposed a similar approachwith piecewise Gaussian processes that allows for sharptransitions in the covariance structure
Nott and Dunsmuir (2002) used a weighted average of stationaryprocesses to describe the conditional behaviour of a processgiven the values of the process at a set of monitoring sites
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 3 / 30

Fuentes (2001)
High Frequency Kriging Procedure
Suppose Z (·) is a non-stationary process observed on a givenspatial region D
The region D is divided into k disjoint subregions Si ,i = 1, 2, . . . , k such that
D =k⋃
i=1
Si
Here k can be considered to be a variable valid for estimation
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 4 / 30

Fuentes (2001)
Representation of Z
Z is represented as a weighted average of orthogonal localstationary processes Zi
Z (s) =k∑
i=1
Zi(s)wi(s)
Each wi(·) is a weight function (e.g . the inverse of the distancebetween s and Si)Each Zi is a stationary process with spatial covariancerepresenting the spatial structure of Z in the subregion Si
The non-stationary covariance of Z is defined as
cov(Z (s),Z (t)) =k∑
i=1
wi(s)wi(t)cov(Zi(s),Zi(t))
where cov(Zi(s),Zi(t)) = Kθi(s − t), Kθi
(·) is MaternSSES Reading Group Smoothing and Weighted Averages October 28, 2014 5 / 30

Fuentes (2001)
Algorithm to Find k
Start with small number of subregions (i .e. a small value of k)
Increase k by dividing each subregion Si in half
Repeat this until we have less than 36 observations in thesubregions
or
until the AIC suggests no significant improvement in theestimation of θi for i = 1, . . . , k by increasing the number ofsubregions k
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 6 / 30

Fuentes (2001)
More Details on Finding k
If data are in a regular grid, the Whittle (1954) approximation tothe local stationary functions is used to calculate the globallikelihood to obtain the AIC value
If the data are not in a regular grid, then the method proposedby Kitanidis (1993) and by Mardia and Marshall (1984) is usedto efficiently maximize the global likelihood to obtain the AIC
The minimum number of observations in a subregion is restrictedto 36 as it is not recommended to calculate the periodogramwhen the number of sample points available to compute thesample covariance is less than 36 (see Haas 1990, Journel andHuijbregts 1978, SAS/STAT Technical Report 1996)
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 7 / 30

Fuentes (2001)
Estimation of Covariance Parameters
Recall that the non-stationary covariance of Z is represented as
cov(Z (s),Z (t)) =k∑
i=1
wi(s)wi(t)cov(Zi(s),Zi(t))
Assuming cov(Zi(s),Zi(t)) = Kθi(s − t) is a Matern covariance
structure we have
cov(Z (s),Z (t)) =k∑
i=1
wi(s)wi(t)Kθi(s − t)
We need to estimate θi for each Si
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 8 / 30

Fuentes (2001)
Estimation of Covariance Parameters (cont.)
Using a spectral approach assume the spectral function
fi(ω) = φi(|ω|2)(−νi−d/2)
for Zi for each subgrid Si so that θi = (φi , νi)T
Let Gi be the generalized covariance corresponding to fi
φi and νi are obtained using a weighted non-linear least squarestechnique in the spectral domain
With these estimates we get the estimated generalizedcovariance
G (Z (s),Z (t)) =k∑
i=1
wi(s)wi(t)Gi(Zi(s),Zi(t))
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 9 / 30

Fuentes and Smith (2001)
Continuous Case
Spatially Weighted Average of Local Stationary Processes:
Z (s) =k∑
i=1
Zi(s)wi(s)
where wi is the weight function and Z ′i s are orthogonalstationary processes with Zi(s) ⊥ Zj(t), for any i 6= j
Continuous Convolution of Local Stationary Processes:
Z (s) =
∫D
K (s − u)Zθ(u)(s)du
where K is kernel function and Zθ(u) u ∈ D, is a family ofindependent stationary Gaussian processes indexed by θ, which isassumed to vary smoothly across space
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 10 / 30

Fuentes and Smith (2001)
Kernel Smoothing Method
Stationary Gaussian processes can be represented in the form
Z (s) =
∫D
K (s − u)X (u)du
where K (·) is some kernel function and X (·) is a Gaussian whitenoise process
This can be extended to non-stationary processes
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 11 / 30

Fuentes and Smith (2001)
Kernel Smoothing Models
Model 1: Process Convolution Model
Z (s) =
∫D
Ks(u)X (u)du (1)
where Ks depends on the location s
Model 2: Continuous Convolution of Local Stationary Processes
Z (s) =
∫D
K (s − u)Zθ(u)(s)du (2)
where Zθ(u)(s), s ∈ D is a family of independent stationaryGaussian processes indexed by θ(u)
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 12 / 30

Fuentes and Smith (2001)
Kernel Smoothing Models (cont.)
Generally, Model (1) and (2) are not equivalent
Since Zθ(u) is a family of independent stationary Gaussianprocess, it can be written in the form,
Zθ(u)(s) =
∫R2
Ku(x − s)Xu(x)dx
where Ku is a kernel for each location u, and Xu is anindependent white noise process for each location u
Only in the case that the process Xu is common across all u(instead of being an independent white noise process for eachlocation u) can Model (1) and (2) be expressed interchangeably
However, Zθ(u)(s), s ∈ D are correlated through kernelsmoothing
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 13 / 30

Fuentes and Smith (2001)
Covariance Structure of Non-Stationary Process Z
Let Zθ(u) be a stationary Gaussian process with covariancematrix Cθ(u), that is,
cov(Zθ(u)(x1),Zθ(u)(x2)) = Cθ(u)(x1 − x2)
The covariance between locations x1 and x2 of the non-stationaryprocess Z is a convolution of the local covariances Cθ(u)(x1− x2),
C (x1, x2; θ) =
∫D
K (x1 − u)K (x2 − u)Cθ(u)(x1 − x2)du
Assume that θ(u) is a continuous function of u
In implementation, the integration can be approximated byRiemann sum or Monto Carlo integration.
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 14 / 30

Fuentes and Smith (2001)
Hierarchical Bayesian Model
Z (s) =
∫D
K (s − u)Zθ(u)(s)du
Stage 1:Conditional on model parameters {θ(u), u ∈ D}, Z is Gaussian
Stage 2:θ(u) = a + ri + cj + εθ(u), where the process εθ(u) is astationary spatial process with mean zero and its covariancestructure can be modeled by some well-known covariancefunction with unknown parametersAnother parameter that needs to be estimated is the bandwidthh that defines the kernel function K
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 15 / 30

Kim, Mallick, and Holmes (2005)
Piecewise Gaussian Processes
Much like Fuentes (2001), partition region into severalsubregions and fit a stationary process within each subregion
Adapted to deal with sharp transitions in covariance structure,so processes assumed independent across subregions
The resulting non-stationary model is not smooth
One possible application is modeling soil permeability
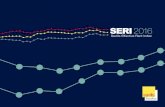
Voronoi tessellation (Green and Sibson 1978) used to determinenumber of subregions and their centers
Fit model within a Bayesian framework
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 16 / 30

Kim, Mallick, and Holmes (2005)
Voronoi Tessellation
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 17 / 30

Nott and Dunsmuir (2002)
General Idea
Measurements of a spatial process are available at a set ofmonitoring sites
An empirical covariance matrix can be estimated from thesemeasurements
Want to extend this covariance matrix to a covariance functionover the entire region of interest
Do this with a weighted average of local stationary processes
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 18 / 30

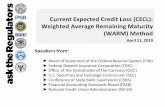
Nott and Dunsmuir (2002)
Illustration
Image from Haas 1990
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 19 / 30

Nott and Dunsmuir (2002)
Notation
Z = {Z (s), s ∈ Rd} is the spatial process of interest
s1, . . . , sn are the sites at which Z is observed
Γ is the covariance matrix for (Z (s1), . . . ,Z (sn))T
Wi(s), i = 1, . . . , I are a collection of independent, zero-mean,stationary processes which describe the behavior of Z locallyabout a collection z1, . . . , zI of I (unmonitored) locations
Ri(h), h ∈ Rd is the covariance function corresponding to Wi(s)
Ci = [Ri(sj − sk)]nj ,k=1 is the covariance matrix of
Wi = (Wi(s1), . . . ,Wi(sn))T
ci(s) is the vector (Ri(s − s1), . . . ,Ri(s − sn))T ofcross-covariances between Wi(s) and Wi
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 20 / 30

Nott and Dunsmuir (2002)
Representation of Wi(s)
We can represent Wi(s) as
Wi(s) = ci(s)TC−1i Wi + δi(s)
where δi(s) is a zero-mean, non-stationary random field withcovariance function
Rδi (s, t) = Ri(t − s)− ci(s)TC−1i ci(t)
Note that ci(s)TC−1i w is the simple kriging predictor of Wi(s)given Wi = w
δi(s) describes the residual variation, so δi(s) = 0 whens ∈ {s1, . . . , sn}
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 21 / 30

Nott and Dunsmuir (2002)
Representation of Non-Stationary Process
Define a non-stationary process W ∗(s) by
W ∗(s) =∑i
νi(s)µi(s) +∑i
νi(s)1/2δi(s)
Each νi(s) is a weight function
Each δi(s) is a residual process
Each µi(s) is a mean process given by
µi(s) = ci(s)TC−1i W ∗
where W ∗ is a zero-mean nx1 random vector with covariancematrix Γ uncorrelated with each δi(s)
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 22 / 30

Nott and Dunsmuir (2002)
Covariance of Non-Stationary Process
With this representation, W ∗(s) has covariance function
R∗(s, t) =∑i ,j
νi(s)νj(t)ci(s)TC−1i ΓC−1j cj(t)
+∑i
νi(s)1/2νi(t)1/2Rδi (s, t)
We use a covariance function of this form to estimate thecovariance of Z (s)
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 23 / 30

Nott and Dunsmuir (2002)
Covariance of Non-Stationary Process (cont.)
Changing notation we can write
Cov(W ∗(s),W ∗(t)) = Σ0(s, t) +I∑
i=1
wi(s)wi(t)Cθi (s − t)
Σ0(s, t) is a function of the empirical covariance matrix Γ andthe local stationary models Wi(s)
The Wi(s) are computed so that Cov(W ∗(sk),W ∗(sl)) = Γkl
The 2nd term is similar to the model proposed by Fuentes (2001)
Weighted average of residual covariance functions
Condition on observed values at the monitoring sites
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 24 / 30

Nott and Dunsmuir (2002)
Choice of Weight Functions
The weight functions νi(s) should have the following properties
νi(s) ≥ 0 ∀i = 1, . . . , I and ∀s ∈ Rd∑i νi(s) = 1
argmax(νi(s)) = zi ∀i = 1, . . . , I
νi(s) decays smoothly to zero as ||s − zi || −→ ∞One choice of νi(s) is
νi(s) = fη(s−zi )∑j fη(s−zj )
where fη(·) is a kernel function given by
fη(t) = exp(− ||t||2
η)
and η is a smoothing parameter
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 25 / 30

Nott and Dunsmuir (2002)
Estimation of Γ
Can estimate covariance matrix Γ by averaging over time
Γnxn =1
M
M∑i=1
(zi − z)(zi − z)T
Could alternatively use the Loader & Switzer (1992) empiricalBayes shrinkage estimator
ΓLS = λΓ + (1− λ)C
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 26 / 30

Nott and Dunsmuir (2002)
Estimation of the Ri(h)
For each i = 1, . . . , I fit a variogram within a window centeredon the point zi
z1, . . . , zI could be on a grid covering the region of interest
Might instead be based on knowledge of non-stationarity
Recommend at least 10 sites in each window
Related to moving window kriging (Haas 1990,1995)
One can then estimate ci(s), cj(t), Ci , Cj , and Rδi (s, t)
and ultimately compute R∗(s, t)
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 27 / 30

Nott and Dunsmuir (2002)
Advantages of this Method
Produces a valid non-negative definite non-stationary covariancefunction
”Computationally attractive,” especially in comparison todeformation techniques
Can be extended to multivariate processes
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 28 / 30

References
Fuentes, M. (2001). “A high frequency kriging approach fornon-stationary environmental processes,” Environmetrics, 12(5),469-483.
Fuentes, M. and Smith, R.L. (2001). “A new class ofnonstationary spatial models,” Technical report, North CarolinaState University, Institute of Statistics Mimeo Series #2534,Raleigh, NC.
Haas, T.C. (1990). “Lognormal and Moving Window Methodsof Estimating Acid Deposition,” Journal of the AmericanStatistical Association, 85, 950-963.
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 29 / 30

References (cont.)
Kim, H.M., Mallick, B.K., and Holmes, C.C. (2005). “Analyzingnonstationary spatial data using piecewise Gaussian processes,”Journal of the American Statistical Association, 100, 653-658.
Nott, D.J. and Dunsmuir, W.T.M. (2002). “Estimation ofnonstationary spatial covariance structure,” Biometrika, 89,819-829.
Sampson, P.D. (2010). ”Constructions for Nonstationary SpatialProcesses,” in Handbook of Spatial Statistics. Boca Raton, FL:CRC Press, 119-130.
SSES Reading Group Smoothing and Weighted Averages October 28, 2014 30 / 30