Sm4rt Bird
24
description
Sm4rt Bird. Review from 4810. Designing a quad rotor copter to aid in USAR missions. Implementing an autonomous and manual mode of operation. Autonomous flight will allow the copter to follow a target without any user commands having to be entered. Changes Made from PDR:. - PowerPoint PPT Presentation
Transcript of Sm4rt Bird


Review from 4810• Designing a quad rotor copter to aid in USAR missions.
• Implementing an autonomous and manual mode of operation.
• Autonomous flight will allow the copter to follow a target without any user commands having to be entered.

Changes Made from PDR:• Purchasing our own flight controller.
• Increasing autonomous capabilities of device.
• No longer using MATLAB for GUI/Computer Vision.

GUI

Power
- A power harness must be designed and fabricated or purchased
- The harness will hold the ESCs at the full battery voltage
- The harness must be able to handle the current- The harness must avoid being too bulky

Power HarnessSpider Squid

Wire Gauge- Using the Preece equation for the ampacity of a copper wire , , one
can estimate the necessary diameter given a certain current- is the fusing current for the wire- is a constant that is specific to different materials- is the diameter of the wire- Because of the relationship between diameter and fusing current,
using one thicker wire versus 4 thinner wires can reduce weight.

Wire Gauge
- Our copter will use 30 Amp ESCs, so the gauge of the cross-wires will be determined using 60 Amps.- Using the equation from earlier, and a chart of American
Wire Gauge diameters, the cross wires should be between .19 and .20- For even more leeway we will use .18- Using the same method and KCL it was determined that the
main wires before the X should be .12

Connectors
- 3.5 mm Bullet style connectors
- EC5 Connector
www.rcdude.com
www.twistedhobby.com

Other Power Considerations
- The ESCs are held at the batteries full voltage (14.8V)- The ESCs BECs (Battery Eliminator Circuit) power the flight
controller (5V)- The ESCs also limit the power delivered to each motor- The ESCs are rated at 30A, which exceeds the maximum
current draw of the motors which is 18A

Power Considerations- Since most of the components are held at a constant DC voltage, the
available current from the battery needs to be considered - Since the ESCs (x4) can draw up to 30A, the battery will need to be
able to supply 120A - Maximum discharge is determined by =- Were C is known as the discharge rate- For our application we are using a 5000mAh battery with a discharge
rate of 25C - Our maximum discharge would be 125A

Flight ControllerFeatures
• Supports MegaPirateNG and MultiWii firmware
• Up to 8 motor outputs• 4 Serial ports for debug/Bluetooth/GPS• 8 Analog output for external devices• I2C port for extended device• MPU6050 6-axis gyro/accel• HMC5883L 3-axis magnetometer• MS5611-01BA01 high precision altimeter• On board logic level converter
http://www.hobbyking.com/hobbyking/store/__31138__multiwii_and_megapirate_aio_flight_controller_w_ftdi_atmega_2560_v2_0.html
CRIUS AIOP v2.0 (atmega 2560)

Flight Controller
From PDR

Flight Controller
New and optimized design

Flight ControllerFeatures
• MSP430F249 microcontroller
• 12V, 5V, 3.3V voltage regulators
• 4 onboard programmable LEDs
• 40+ General Purpose I/O pins
• 16Mhz crystal oscillator• 2 UART ports• 60KB flash memory• 2KB RAM

Flight ControllerWhat has been done:
• Test of all the parts on the board• Establish PC to microcontroller
communication• Generation of PWM for motor
control
What needs to be done:
• Acquire readings from sensors• Test wireless communication• Implement control algorithm

Computer Vision

Tools:• Python2.7.5 with
Spyder IDE• OpenCV 2.4.2
Image Processing Library from Intel

HSV • Hue, Saturation, Value
• Used instead of RGB because it is the “pure” color, effected very little by brightness or lighting levels.
• Often used in CV for feature detection or image segmentation.

Approach• Read in image from camera
• Convert image from RGB to HSV
• Filter HSV image properties to only show objects in image with certain properties

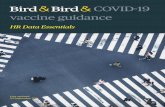
DEMONSTRATION
• Objective: Detect a pink highlighter from three different color highlighters
• Using the aforementioned approach, the following results were obtained.

Continuing Work• From the filtered HSV image, a shape of a certain color must now be
detected. Preferably circle.
• The circles parameters can be used to measure distance and relation in space to quadcopter.
• Adjust movements accordingly based on size and location of circle in radius to maintain target at desired distance from robot.

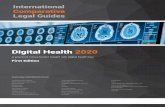
Gantt Chart
We are here

Plan: Now-Milestone 2• When parts arrive, Tony and Gilles will begin construction of device.
• During construction, John and Justin will continue working on Computer Vision, GUI, and software integration.