Sliding Friction Effect on Dynamics of Crossed Beveloid Gears With Small Shaft Angle
20
TUGAS SLIDING FRICTION GEA PROG UNIV Nama NPM Kelompok Dosen S BAHASA INGGRIS TEKN TRANSLATE JURNAL N EFFECT ON DYNAMICS OF CROS ARS WITH SMALL SHAFT ANGLE Oleh : GRAM STUDI TEKNIK MES FAKULTAS TEKNIK VERSITAS BENGKUL 2015 : Dimas Setiawan : G1C014024 : B : Erinofiardi, S.T., M.T. NIK SSED BEVELOID SIN LU
-
Upload
dimas-setiawan -
Category
Documents
-
view
12 -
download
1
description
Teknik
Transcript of Sliding Friction Effect on Dynamics of Crossed Beveloid Gears With Small Shaft Angle

TUGAS BAHASA INGGRIS TEKNIK
TRANSLATE JURNAL
SLIDING FRICTION EFFECT ON DYNAMICS OF CROSSED BEVELOID
GEARS WITH SMALL SHAFT ANGLE
Oleh :
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS BENGKULU
2015
Nama : Dimas Setiawan
NPM : G1C014024
Kelompok : B
Dosen : Erinofiardi, S.T., M.T.
TUGAS BAHASA INGGRIS TEKNIK
TRANSLATE JURNAL
SLIDING FRICTION EFFECT ON DYNAMICS OF CROSSED BEVELOID
GEARS WITH SMALL SHAFT ANGLE
Oleh :
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS BENGKULU
2015
Nama : Dimas Setiawan
NPM : G1C014024
Kelompok : B
Dosen : Erinofiardi, S.T., M.T.
TUGAS BAHASA INGGRIS TEKNIK
TRANSLATE JURNAL
SLIDING FRICTION EFFECT ON DYNAMICS OF CROSSED BEVELOID
GEARS WITH SMALL SHAFT ANGLE
Oleh :
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS BENGKULU
2015
Nama : Dimas Setiawan
NPM : G1C014024
Kelompok : B
Dosen : Erinofiardi, S.T., M.T.

Sliding Friction Effect On Dynamics Of Crossed Beveloid
Gears with Small Shaft Angle
(Pengaruh Gesekan Sliding pada Dinamika Gigi Geser Beveloid dengan Sudut Poros Kecil)
Song Chaosheng 1,*, Zhu Caichao1 and Liu Wenji
The State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing
400030,China 2
School of Mechanical Engineering, Tianjin Polytechnical University, Tianjin, 300160, China2
(Naskah diterima 7 Maret 2012; Revisi November 5, 2012; Diterima 4 Januari 2013)
Abstrak
Kami mengusulkan metode baru menggabungkan gigi geser Model gesekan dan
model jaring dimuat ke dalam nonlinear analisis melintasi Model getaran beveloid diarahkan
untuk mengevaluasi mesh dan karakteristik dinamis. Sebuah kontak gigi dimuat 3-dimensi
kuasi-statis analisis digunakan dan derivasi dari gaya gesek geser didistribusikan dan sintesis
friksi dengan bentuk yang efektif diterapkan di analisis dinamis nonlinear. Menggunakan
metode yang diusulkan, efek eksitasi dari friksi pada mesh gigi dan tanggapan dinamis pada
tingkat beban yang berbeda ditemukan dan diselidiki. Hasil analisis menunjukkan bahwa
adanya friksi antara gigi terlibat geser memang cenderung mempengaruhi pola kontak,
distribusi beban normal dan tekanan kontak maksimal, tetapi tidak substansial. Pengaruh
beban torsi gesekan ditemukan dengan pengaruh yg turun lebih besar pada kekakuan mesh
dan kesalahan transmisi pada kasus beban yang lebih berat. Besarnya dan directionality geser
gesekan pada efektif total yang terlibat pada gigi pameran variasi kurang jelas dari setiap gigi
karena kontribusi dari efek beberapa gigi. Juga, Eksitasi gesekan cenderung menurun
kekuatan jala dinamis sedikit untuk kedua ringan dan kasus beban berat.
Kata kunci: Gigi Beveloid; Dinamika nonlinier; Sliding gesekan; Mesh karakteristik; Sumbu
lintasan

1. Pendahuluan
Gigi Beveloid banyak digunakan dalam transmisi daya poros non-paralel untuk
rendah-reaksi robot, all-wheel drive untuk aplikasi otomotif dan kelautan dengan sudut
poros kecil (kurang dari 20 °). Tetapi dengan meningkatnya kebutuhan kecepatan yang
lebih tinggi, efisiensi yang lebih tinggi, keandalan dan kapasitas beban, analisis
dinamis pada jenis desain gearing sangat dituntut karena getaran dan kebisingan
merupakan masalah yang berbahaya. Namun, dibandingkan dengan paralel dan jenis
lain dari gigi poros non-paralel, usaha yang sangat terbatas telah diarahkan pada
pemodelan gesekan dan analisis dinamis melintasi sistem pasangan gigi beveloid
karena rumit geometri permukaan gigi dan akibatnya waktu dan kopling spasial
bervariasi mesh.
Teori gearing dari beveloids dapat ditelusuri ke pertengahan abad terakhir oleh
Merritt [1] dan Beam [2]. Kemudian, sejumlah studi yang dilakukan pada beveloid
manufaktur peralatan dan analisis kontak gigi (TCA) [3-14]. Untuk beveloid peralatan
manufaktur, metode utama, yang merupakan mencondongkan kerja-punjung metode
lancip hobbing dan meja geser metode lancip hobbing, pertama kali diusulkan oleh
Mitome [3, 4]. Lalu ia dan Kikuchi [5, 6] mengusulkan jenis baru cekung-kerucut
gearing yang dapat dihasilkan oleh pembentuk gigi untuk aplikasi transmisi laut.
Untuk desain gigi dan TCA, Mitome [7], Ohmachi [8] dan Komatsubara [9] dilakukan
analyticaland penyelidikan eksperimental tentang pengaruh pengaturan mesin pada
kontak gigi dan dikembangkan gearing concaveconical baru untuk transmisi laut yang
memungkinkan gigi bantalan yang terletak di wilayah tengah lebar gigi. Brauer [10],
Tsai [11] dan Dia [12] mengembangkan metode desain geometri, berasal model
matematika untuk proses generasi dan menganalisis perilaku kontak gigi gigi beveloid.
Li [13] mengusulkan jenis baru non-rumit gigi beveloid digunakan untuk transmisi
laut. Zhu dan Song [14-17] menganalisis pengaruh parameter desain geometri
karakteristik meshing dan respon dinamis dari gigi beveloid menyeberang. Namun,
efek gesekan geser dan perilaku dinamis nonlinear tidak pernah diselidiki sebelumnya
karena karakteristik jala kompleks temporal dan spasial bervariasi dan kopling pinion
dan gigi gerakan di koordinat mereka.
Dalam tulisan ini, model gesekan geser untuk menyeberang gigi beveloid dengan
sudut poros kecil berasal didasarkan pada quasistatic dimuat analisis kontak gigi
(LTCA). Kemudian, tata ruang, waktu bervariasi dan beban kekakuan jala tergantung
dan kesalahan transmisi serta Eksitasi gesekan kemudian dimasukkan ke dalam 14
derajat kebebasan (DOF) Model getaran melintasi beveloid diarahkan sistem rotor.

Hasil simulasi numerik menggunakan metode yang diusulkan diperiksa untuk
mendapatkan pemahaman yang lebih baik geser efek gesekan pada mesh andnonlinear
dinamika jenis gigi.
a. Bidang kontak dan gesekan arah derivasi
b. Gesekan terdistribusi olehkekuatan sintesis
Gambar. 1. Aksesoris geser Model gesekan menyeberang gigi beveloid.
2. Aksesoris sliding Model gesekan
Sliding gesekan yang dihasilkan karena gerakan relatif antara titik mengontak
permukaan gigi yang bergerak di dataran tangensial bersama mereka di posisi
mengontak umum [18]. Sebuah model jala geser spasial dan waktu yang bervariasi
diusulkan berdasarkan LTCA yang dilakukan oleh dimuat paket analisis kontak gigi
statis 3dimentional untuk menyeberang gigi beveloid [19]. Skema geser Model
gesekan dari pasangan gigi beveloid menyeberang diilustrasikan pada Gambar. 1 (a).
Koordinat S p (x p, y p, z p) dan S R (x R, y R, z R) adalah tetap untuk pinion dan gigi,
masing-masing. S f (x f, y f, z f) adalah tetap ke frame sebagai sistem koordinat global.

E adalah offset dan adalah sudut poros. Untuk sel grid saya, posisi vektor r p dan r
g mulai dari yang diproyeksikan lintas poin masing pada pinion dan gigi kapak. n i
adalah normal arah dihitung pada sel grid dan n fi geser arah kecepatan relatif dihitung.
F i adalah beban kontak dan F fi aku s gaya gesekan didistribusikan.
Kecepatan geser relatif V pg dari pinion relatif terhadap gigi diperoleh dengan :
Dimana V p dan V g adalah kecepatan titik P dari pinion dan gigi. p dan g
adalah kecepatan nominal pinion dan gigi poros. Vektor dapat direpresentasikan dalam
sistem koordinat tetap
Dimana , and adalah koordinat posisi. Kemudian dapat diwakili oleh
Dimana N 1 dan N 2 adalah nomor gigi pinion dan gigi. Arah kecepatan geser relatif
Sejak pasukan kontak normal pada F sel grid i dihitung dari LTCA oleh HypoidK [19],
yang didistribusikan gesekan gaya dapat dinyatakan sebagai

Dimana adalah koefisien gesekan. Seperti yang ditunjukkan pada Gambar. 1
(b), total gaya gesekan dan komponennya , dan serta komponen saat
gesekan , dan dihitung :
Kemudian disamakan cosinus arah gesekan yang efektif ( , , dan jari-jari rotasi
arah (ℷ , ℷ , ℷ ) bisa diwakili oleh:
Gambar. 2. Parameter A 14DO Flumped Model dinamis untuk beveloid sistem
rotor diarahkan.

Koefisien gesek efektif untuk model gesekan disamakan adalah
3. Pemodelan Dinamis
Sebuah multi-tubuh 14-DOF disamakan parameter model dinamik didirikan untuk
mewakili melintasi sistem beveloid-gearedrotor khas seperti yang ditunjukkan pada
Gambar 2.
Model ini terdiri dari empat elemen inersia: pinion, gigi, mesin dan beban. Pinion
dan gigi dimodelkan sebagai badan kaku dan masing-masing diwakili menggunakan
enam translasi independen dan koordinat rotasi. Kedua mesin dan beban hanya memiliki
satu DOF, yang merupakan rotasi sepanjang poros sumbu masing-masing. Poros dan
bantalan mendukung dari pinion dan gigi dimodelkan oleh seperangkat unsur kekakuan.
Persamaan gerak dapat dinyatakan dalam bentuk matriks sebagai berikut.
Koordinat umum yang diberikan oleh
Matriks massa yang disamakan dapat dinyatakan sebagai
Di mana dan adalah momen inersia dari elemen mesin dan beban masing-masing.
dan adalah massa pinion dan gigi, masing-masing. , , ( = , ) saat
inersia relatif ( = , ) terhadap sistem diwakili oleh koordinat , , .

Sistem matriks kekakuan dapat dinyatakan sebagai
Dimana
Radius rotasi directional dapat dinyatakan sebagai
Gaya eksitasi vektor F dapat dinyatakan sebagai

Tabel 1. Parameter contoh beveloid gigi transmisi.
Dinamika gaya gesekan dan dinamika gaya mesh dapat dihitung dengan rumus
Dimana dan adalah kekakuan jala jala aempirical redaman efektif. ( ) adalah
kesalahan kinematik transmission translasi. adalah reaksi gigi. DTE adalah kesalahan
transmisi dinamis sepanjang garis tindakan dan dapat dinyatakan sebagai

Tabel 2. Setara pendukung.
Gambar. 3. Perbandingan pola kontak gigi dengan dan tanpa geser gesekan untuk tingkat
beban yang berbeda.

4. Hasil Komputasi
Desain gigi dan sistem dinamis parameter listedin Tabel 1. setara kekakuan
poros-bearing ditunjukkan pada Tabel 2. integrasi numerik menerapkan eksplisit 4/5
urutan Rumus Runge-Kutta digunakan untuk memecahkan nonlinear dy-th
Tabel 3. Nilai rata-rata titik jala efektif dan line-of-tindakan
a. Waktu-berbagai nilai b. Puncak-puncak Nilai
Gambar. 4. Perbandingan kesalahan transmisi translasi dengan dan tanpa gesekan slide
untuk beban yang berbeda.
4.1. Waktu-Memvariasikan Karakteristik Mesh
Gambar. 3 menunjukkan pola kontak pada sisi drive gigi bawah berbagai beban
dari 100 Nm sampai 2000 Nm. Dengan dan tanpa analisis gesekan dibandingkan, dan
koefisien gesekan dipilih sebagai nilai relatif besar dengan empiris sehingga untuk
menekankan efek gesekan. Hal ini dapat dilihat bahwa untuk tidak peduli apakah
tingkat beban ringan atau tingkat beban berat, pengaruh gesekan pada pola kontak
kuasi-statis keseluruhan,
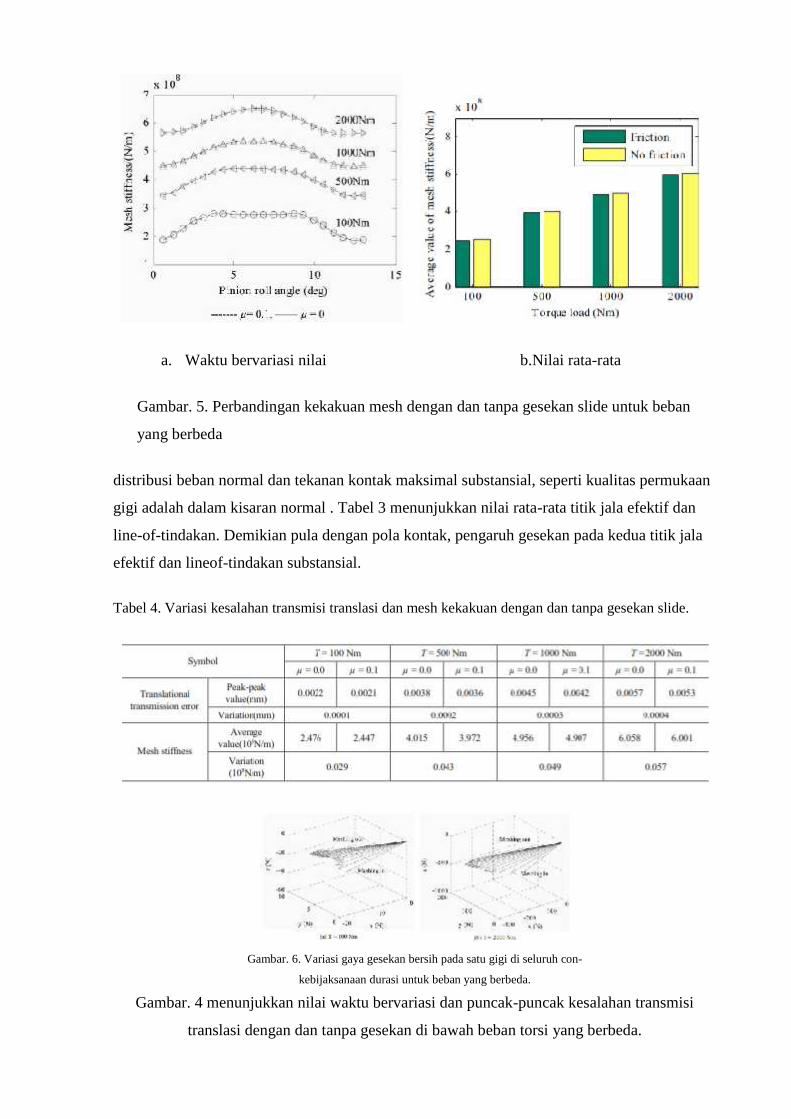
a. Waktu bervariasi nilai b.Nilai rata-rata
Gambar. 5. Perbandingan kekakuan mesh dengan dan tanpa gesekan slide untuk beban
yang berbeda
distribusi beban normal dan tekanan kontak maksimal substansial, seperti kualitas permukaan
gigi adalah dalam kisaran normal . Tabel 3 menunjukkan nilai rata-rata titik jala efektif dan
line-of-tindakan. Demikian pula dengan pola kontak, pengaruh gesekan pada kedua titik jala
efektif dan lineof-tindakan substansial.
Tabel 4. Variasi kesalahan transmisi translasi dan mesh kekakuan dengan dan tanpa gesekan slide.
Gambar. 6. Variasi gaya gesekan bersih pada satu gigi di seluruh con-
kebijaksanaan durasi untuk beban yang berbeda.
Gambar. 4 menunjukkan nilai waktu bervariasi dan puncak-puncak kesalahan transmisi
translasi dengan dan tanpa gesekan di bawah beban torsi yang berbeda.

Kedua waktu bervariasi dan puncak-puncak nilai dengan gesekan sedikit lebih
rendah dari hasil tanpa gesekan. Pengaruh tersebut menjadi lebih jelas ketika beban
meningkat torsi. Hal ini wajar karena beban torsi yang lebih besar kekuatan gesekan
yang lebih besar dengan asumsi yang sama koefisien gesekan. Namun, variasi tren yang
sebenarnya tidak begitu signifikan. Gambar. 5 menunjukkan waktu bervariasi dan rata-
rata nilai kekakuan mesh dengan dan tanpa gesekan di bawah beban torsi yang berbeda.
Kedua waktu-bervariasi dan nilai-nilai rata-rata dengan gesekan sedikit lebih rendah
dari nilai-nilai tanpa gesekan, sebagai hasilnya mirip dengan kesalahan transmisi
translasi. Juga, variasi besaran kurva dan tren tidak begitu signifikan. Hal ini terkait
dengan pengaruh kecil pada pola kontak dan distribusi beban seperti yang ditunjukkan
inFig.3. Variasi kesalahan transmisi translasi dan kekakuan mesh dengan dan tanpa
gesekan geser ditunjukkan pada Tabel 4.
Setelah LTCA, sintesis setara statis dapat diterapkan untuk memperoleh total atau
gaya gesekan pada setiap gigi atau semua gigi dalam kontak menggunakan perhitungan
gesekan yang diusulkan didistribusikan di pers. (1) - (16). Variasi dari friksi bersih pada
gigi tunggal pada durasi kontak seluruh untuk tingkat beban ringan dan tingkat beban
berat dibandingkan pada Gambar. 6. Besarnya kekuatan gesekan bersih pada setiap gigi
menunjukkan variasi yang jelas selama satu siklus mesh. Dan arah dari friksi bersih
ayunan di tingkat tertentu tapi tanpa tren terbalik baik untuk tingkat beban ringan dan
tingkat beban berat. Untuk meshing keluar, variasi gaya gesekan lebih jelas daripada
yang untuk meshing di. Juga, variasi besaran pasukan gesekan bersih menjadi halus
dengan peningkatan beban torsi sejak meshing gigi menjadi lebih baik. Untuk variasi
total gaya gesekan untuk semua gigi seperti ditunjukkan pada Gambar. 7, besaran
pasukan gesekan bersih bervariasi apalagi karena kontribusi dari efek beberapa gigi.
Arah dari friksi bersih masih saja menunjukkan ayunan tertentu untuk kedua cahaya dan
tingkat beban berat.
Disintesis berbagai koefisien gesekan efektif ditunjukkan pada Gambar. 8 untuk
satu siklus jala di bawah tingkat beban torsi yang berbeda. Nilai-nilai koefisien gesekan
efektif bervariasi sedikit antara sekitar 0,084 dan 0,1 sesuai dengan variasi besarnya
friksi bersih untuk semua gigi kontak. Juga, tren untuk kasus-kasus pada tingkat beban
yang berbeda serupa. Namun, variasi koefisien gesek yang efektif dalam satu siklus jala
relatif lebih mendadak untuk tingkat beban yang lebih ringan dan halus untuk tingkat
beban berat sejak lebih gigi datang ke dalam kontak dengan beban yang lebih berat,
yang meredakan perubahan mendadak dari sifat kontak dengan gigi meshing dan keluar

Gambar. 7. Variasi total gaya gesekan untuk semua gigi di kontak untuk berbeda beban
Gambar. 8. Waktu-berbagai koefisien gesekan efektif untuk beban yang berbeda.
\ 4.2 Variasi Waktu Respon Dinamis Nonlinear
Dengan gesekan geser yang diusulkan dan model dinamis nonlinear, analisis
respon dinamik dilakukan pada multi-tubuh multi-DOF disamakan representasi
parameter beveloid sistem rotor diarahkan mengalami gigi jala Eksitasi terkait termasuk
kesalahan transmisi, variasi parameter mesh dan berbagai friksi.
Gambar. 9. kesalahan transmisi dinamis untuk beban yang berbeda.

Gambar. 10. kekuatan jala Dinamis untuk beban yang berbeda.
Gambar. 9 dan 10 menunjukkan kesalahan transmisi dinamis dan kekuatan jala
dinamis untuk ringan dan berat beban torsi, masing-masing. Kesalahan transmisi
dinamis dan kekuatan jala dinamis dipengaruhi oleh kesalahan transmisi dan kekakuan
jala menjadi lebih buruk jelas dengan meningkatnya beban torsi. Juga, fenomena
melompat dapat jelas diamati dalam hasil kekuatan jala dinamis. Frekuensi respon
puncak kenaikan besar dan memiliki kecenderungan yang sama dengan variasi
kekakuan jala seperti yang ditunjukkan pada Gambar. 5. Bantalan jalan utama yang gigi
getaran ditransfer ke gearbox.
Table 5.Variations of dynamic mesh force with and without slide friction.
(a) Seiring arah horisontal
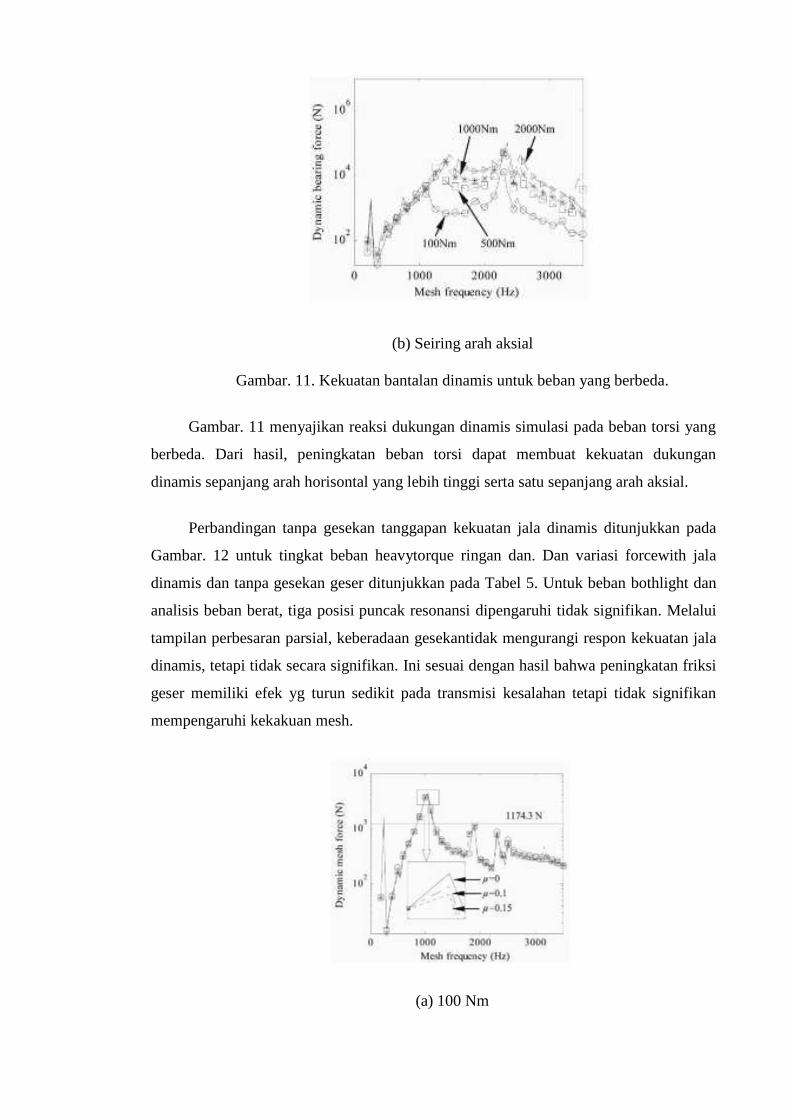
(b) Seiring arah aksial
Gambar. 11. Kekuatan bantalan dinamis untuk beban yang berbeda.
Gambar. 11 menyajikan reaksi dukungan dinamis simulasi pada beban torsi yang
berbeda. Dari hasil, peningkatan beban torsi dapat membuat kekuatan dukungan
dinamis sepanjang arah horisontal yang lebih tinggi serta satu sepanjang arah aksial.
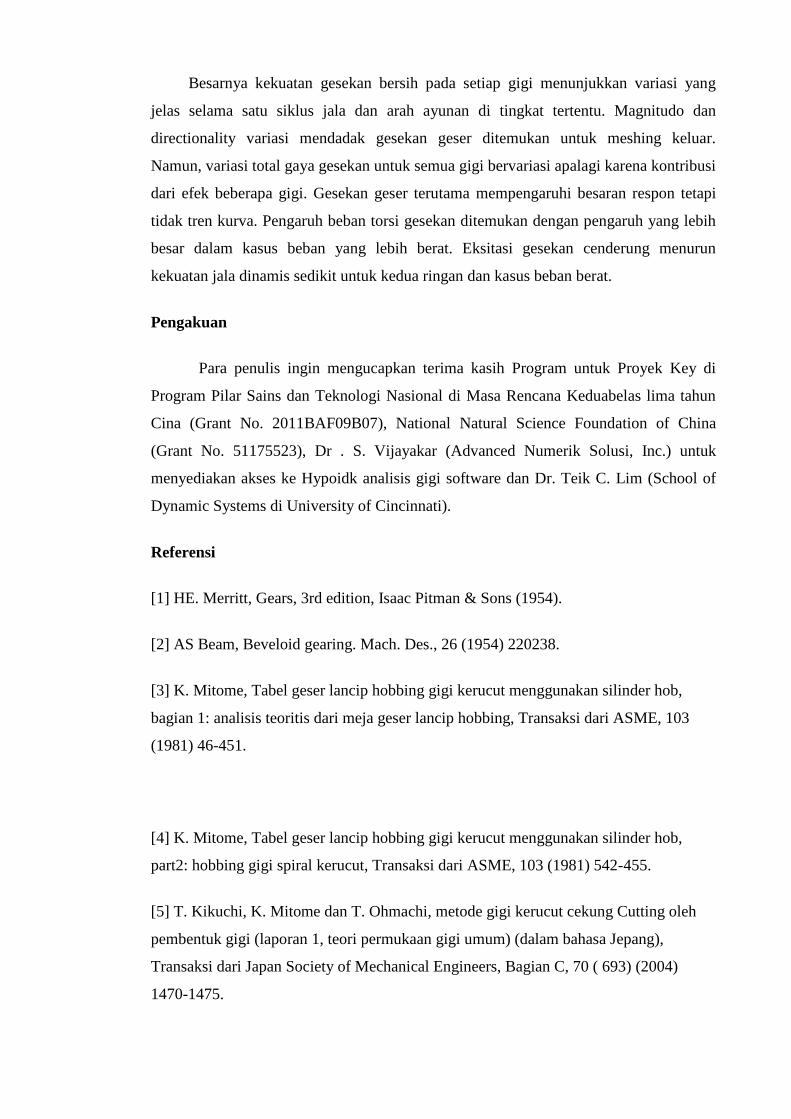
Perbandingan tanpa gesekan tanggapan kekuatan jala dinamis ditunjukkan pada
Gambar. 12 untuk tingkat beban heavytorque ringan dan. Dan variasi forcewith jala
dinamis dan tanpa gesekan geser ditunjukkan pada Tabel 5. Untuk beban bothlight dan
analisis beban berat, tiga posisi puncak resonansi dipengaruhi tidak signifikan. Melalui
tampilan perbesaran parsial, keberadaan gesekantidak mengurangi respon kekuatan jala
dinamis, tetapi tidak secara signifikan. Ini sesuai dengan hasil bahwa peningkatan friksi
geser memiliki efek yg turun sedikit pada transmisi kesalahan tetapi tidak signifikan
mempengaruhi kekakuan mesh.
(a) 100 Nm

(b) 2000 Nm
Gambar. 12. Pengaruh gesekan pada kekuatan jala dinamis untuk beban yang berbeda.
Kita juga dapat menemukan bahwa frekuensi puncak respons besar pertama
memiliki kecenderungan tambahan yang sama sebagai salah satu puncak respon utama
kekuatan jala dinamis karena peningkatan kekakuan jala sebagai posisi puncak
resonansi dipengaruhi tidak signifikan. Melalui tampilan perbesaran parsial, keberadaan
gesekan tidak mengurangi respon kekuatan jala dinamis, tetapi tidak signifikan. Ini
sesuai dengan hasil bahwa peningkatan friksi geser memiliki efek yg turun sedikit pada
kesalahan transmisi tetapi tidak signifikan mempengaruhi kekakuan mesh.
5. Kesimpulan
Berdasarkan analisis kontak gigi dimuat kuasi-statis, derivate Ion didistribusikan
permukaan relatif geser kecepatan dan gaya gesek, model gesekan geser melintasi gigi
beveloid dengan sudut poros kecil diusulkan. Mengingat friksi geser sebagai rumit
Eksitasi ekstra, umum multibody 14-DOFs disamakan parameter model yang diterapkan
untuk melakukan gigi nonlinier analisis dinamis untuk menyeberang beveloid gear set.
Dengan menganalisis hasil dihitung dari contoh kasus, kesimpulan spesifik
berikut dapat diperoleh. Tidak peduli apakah untuk kasus beban berat atau ringan,
pengaruh gesekan pada pola kontak, distribusi beban normal dan tekanan kontak
maksimal substansial. Namun, efek gesekan yang lebih besar pada karakteristik jala
termasuk kekakuan mesh dan kesalahan transmisi yang ditemukan dalam kasus beban
berat daripada dalam kasus beban ringan.
Besarnya kekuatan gesekan bersih pada setiap gigi menunjukkan variasi yang
jelas selama satu siklus jala dan arah ayunan di tingkat tertentu. Magnitudo dan
directionality variasi mendadak gesekan geser ditemukan untuk meshing keluar.
Namun, variasi total gaya gesekan untuk semua gigi bervariasi apalagi karena kontribusi
dari efek beberapa gigi. Gesekan geser terutama mempengaruhi besaran respon tetapi
tidak tren kurva. Pengaruh beban torsi gesekan ditemukan dengan pengaruh yang lebih
besar dalam kasus beban yang lebih berat. Eksitasi gesekan cenderung menurun
kekuatan jala dinamis sedikit untuk kedua ringan dan kasus beban berat.
Pengakuan
Para penulis ingin mengucapkan terima kasih Program untuk Proyek Key di
Program Pilar Sains dan Teknologi Nasional di Masa Rencana Keduabelas lima tahun
Cina (Grant No. 2011BAF09B07), National Natural Science Foundation of China
(Grant No. 51175523), Dr . S. Vijayakar (Advanced Numerik Solusi, Inc.) untuk
menyediakan akses ke Hypoidk analisis gigi software dan Dr. Teik C. Lim (School of
Dynamic Systems di University of Cincinnati).
Referensi
[1] HE. Merritt, Gears, 3rd edition, Isaac Pitman & Sons (1954).
[2] AS Beam, Beveloid gearing. Mach. Des., 26 (1954) 220238.
[3] K. Mitome, Tabel geser lancip hobbing gigi kerucut menggunakan silinder hob,
bagian 1: analisis teoritis dari meja geser lancip hobbing, Transaksi dari ASME, 103
(1981) 46-451.
[4] K. Mitome, Tabel geser lancip hobbing gigi kerucut menggunakan silinder hob,
part2: hobbing gigi spiral kerucut, Transaksi dari ASME, 103 (1981) 542-455.
[5] T. Kikuchi, K. Mitome dan T. Ohmachi, metode gigi kerucut cekung Cutting oleh
pembentuk gigi (laporan 1, teori permukaan gigi umum) (dalam bahasa Jepang),
Transaksi dari Japan Society of Mechanical Engineers, Bagian C, 70 ( 693) (2004)
1470-1475.
[6] T. Kikuchi, K. Mitome dan T. Ohmachi, metode gigi kerucut cekung Cutting oleh
pembentuk gigi (laporan 2, kepala jari-jari yang normal, beban normal yang diijinkan
dan desain sepasang gigi) (dalam bahasa Jepang), Transaksi dari Japan Society of
Mechanical Engineers, Bagian C, 70 (693) (2004) 1476-1481.
[7] K. Mitome dan T. Yamazaki, Desain gigi spiral kerucut terlibat dengan profil
memacu gigi di berpotongan shaft (dalam bahasa Jepang), Transaksi dari Japan Society
of Mechanical Engineers, Bagian C, 62 (598) (1996) 2436-2441.
[8] T. Ohmachi, A. Uchino, H. Komatsubara, M. Saito, K. Saiki dan K. Mitome, Profil
bergeser gigi spiral kerucut dengan kedalaman gigi dalam, Proc. Power Transmission 10
Internasional dan Konferensi Gearing, Las Vegas, DETC2007 (CDROM), detc 2007 /
PTG-34048 (2007).
[9] H. Komatsubara, K. Mitome, T. Ohmachi dan H. Watanabe, Pengembangan gigi
kerucut cekung digunakan untuk transmisi laut (laporan 1, prinsip menghasilkan gigi
kerucut cekung heliks), JSME International Journal, Seri C, 45 (1) ( 2002) 371-377.
[10] J. Brauer, geometri analitis lurus gigi spiral kerucut, Mekanisme dan Mesin Teori,
37 (1) (2002) 127141.
[11] SH Wu dan SJ Tsai, Hubungi analisis stres kerucut condong gigi rumit drive di
perkiraan kontak line, Mekanisme dan Mesin Teori, 44 (9) (2009) 1658-1676.
[12] JL Dia dan XT Wu, analisis kontak gigi dari gigi spiral berbentuk kerucut, Cina
Jurnal Teknik Mesin, 19 (1) (2006) 105-108.
[13] GX Li, JM Wen, X. Zhang dan Y. Liu, teori Meshing dan simulasi gigi beveloid
noninvolute, Mekanisme dan Mesin Teori, 39 (8) (2004) 883-892.
[14] CC Zhu, CS Lagu, CT Lim dan T. Peng, Pengaruh kesalahan perakitan di
menyeberangi beveloid kontak gigi gigi dan respon dinamik, Prosiding ASME 2011
Internasional
Desain Mesin Teknis Konferensi & Komputer dan Informasi di Engineering
Conference, Agustus, Washington, DC, Amerika Serikat, DETC2011-47413 (2011) 1-9.
[15] CS Lagu, CC Zhu, CT Lim dan R. Fan, analisis tegangan akar gigi Komputasi dari
menyeberang gigi beveloid dengan sudut poros kecil, Mekanika Terapan dan Material,
86 (2011) 188 191.
[16] CS Lagu, CC Zhu, CT Lim dan T. Peng, analisis parametrik mesh gigi dan respon
dinamis dimuat transmisi beveloid heliks dengan sudut poros kecil, ASME Journal of
Mechanical Design, 134 (8) (2012) 8.
[17] CC Zhu, CS Lagu, CT Lim dan S. Vijayakar, desain dan kontak gigi analisis
Geometri menyeberang gigi beveloid untuk transmisi laut, Cina Jurnal Teknik Mesin,
25 (2) (2012) 328-337.
[18] T. Peng, Ditambah multi-tubuh analisis dinamis dan getaran hypoid dan sistem
rotor bevel diarahkan, Ph. D. Disertasi, Universitas Cincinnati (2010).
[19] S. Vijayakar, Kontak paket program analisis: HypoidK, Advanced numerik Solusi,
Hilliard, OH (2009).
Song Chaosheng menerima gelar Ph.D. di desain mekanik dan
teori dari Universitas Chongqing, Cina. Dia menghabiskan satu
tahun sebagai sarjana tamu di University of Cincinnati untuk
melakukan penelitian di gigi desain dan gigi dinamika. Saat ini
ia adalah seorang peneliti pasca-dokter di Departemen Teknik
Mesin di Universitas Tsinghua, China.