
Sistem Kendali Tersebar menggunakan Jaringan Sensor dan ... fileSistem Kendali PID Tak Tersebar...
22
Sistem Kendali Tersebar Sistem Kendali Tersebar Sistem Kendali Tersebar Sistem Kendali Tersebar Sistem Kendali Tersebar menggunakan menggunakan menggunakan menggunakan menggunakan Jaringan Sensor dan Aktuator Nirkawat Jaringan Sensor dan Aktuator Nirkawat Jaringan Sensor dan Aktuator Nirkawat Jaringan Sensor dan Aktuator Nirkawat Jaringan Sensor dan Aktuator Nirkawat Pembimbing: Abdul Haris Junus Ontowirjo Pembimbing: Abdul Haris Junus Ontowirjo Pembimbing: Abdul Haris Junus Ontowirjo Pembimbing: Abdul Haris Junus Ontowirjo Pembimbing: Abdul Haris Junus Ontowirjo 2207203001 Dr. Ir. Wirawan, DEA. 2207203001 Dr. Ir. Wirawan, DEA. 2207203001 Dr. Ir. Wirawan, DEA. 2207203001 Dr. Ir. Wirawan, DEA. 2207203001
Transcript of Sistem Kendali Tersebar menggunakan Jaringan Sensor dan ... fileSistem Kendali PID Tak Tersebar...

Sistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarmenggunakanmenggunakanmenggunakanmenggunakanmenggunakanmenggunakanJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator Nirkawat
Pembimbing:Abdul Haris Junus Ontowirjo Pembimbing:Abdul Haris Junus Ontowirjo Pembimbing:Abdul Haris Junus Ontowirjo Pembimbing:Abdul Haris Junus Ontowirjo Pembimbing:Abdul Haris Junus Ontowirjo Pembimbing:Abdul Haris Junus Ontowirjo
2207203001 Dr. Ir. Wirawan, DEA.2207203001 Dr. Ir. Wirawan, DEA.2207203001 Dr. Ir. Wirawan, DEA.2207203001 Dr. Ir. Wirawan, DEA.2207203001 Dr. Ir. Wirawan, DEA.2207203001
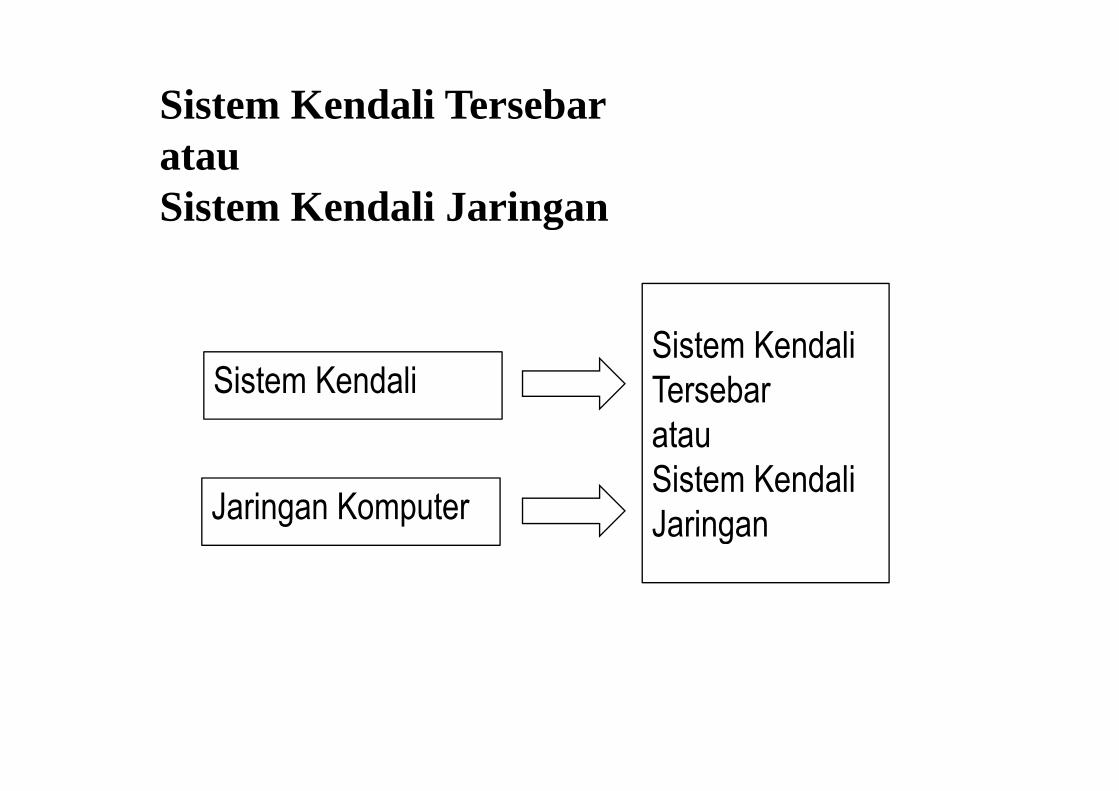
Sistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebaratauatauatauatauatauatauatauSistem Kendali JaringanSistem Kendali JaringanSistem Kendali JaringanSistem Kendali JaringanSistem Kendali JaringanSistem Kendali JaringanSistem Kendali Jaringan
Sistem Kendali Sistem Kendali Sistem Kendali Sistem Kendali Sistem Kendali Sistem Kendali
Sistem Kendali
TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali TersebarSistem Kendali Tersebar
atauatauatauatauatau
Sistem Kendali Sistem Kendali Sistem Kendali Jaringan Komputer
Sistem Kendali Jaringan Komputer
Sistem Kendali Jaringan Komputer JaringanJaringan Komputer JaringanJaringan Komputer JaringanJaringan Komputer JaringanJaringanJaringan
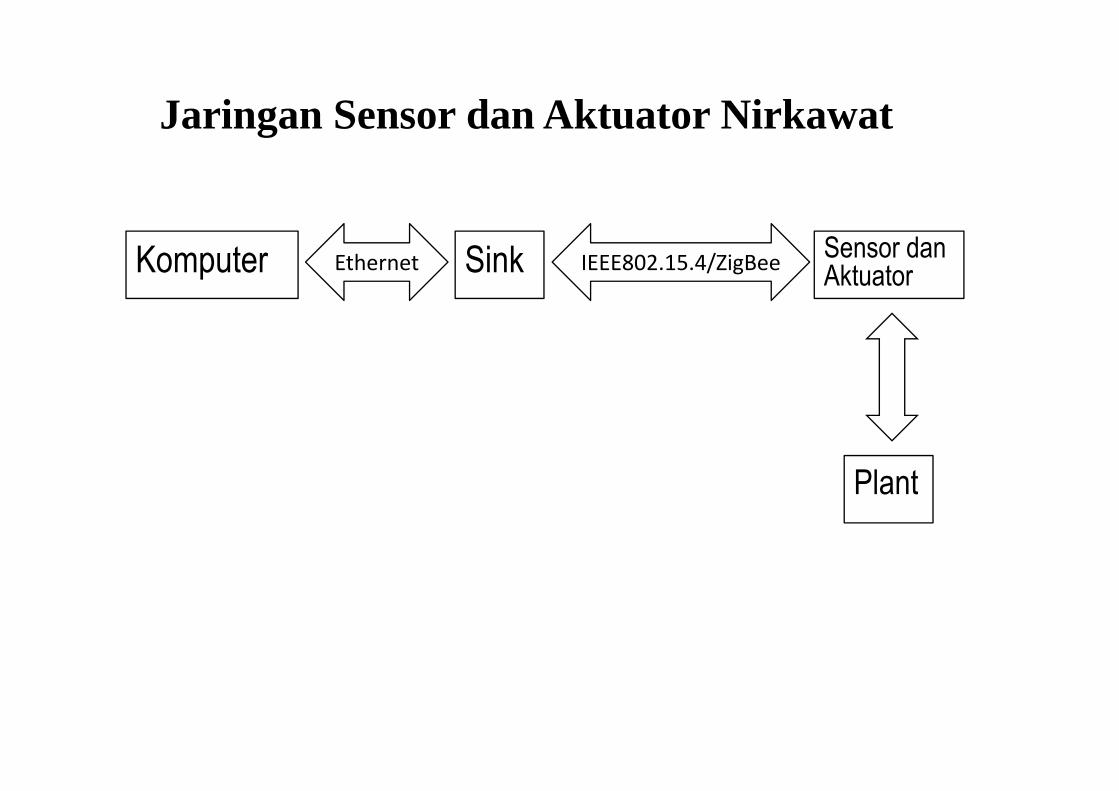
Jaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator NirkawatJaringan Sensor dan Aktuator Nirkawat
Sensor dan SinkKomputer Sensor dan SinkKomputer Ethernet IEEE802.15.4/ZigBeeSensor dan SinkKomputer Ethernet IEEE802.15.4/ZigBeeSensor dan AktuatorSinkKomputer Ethernet IEEE802.15.4/ZigBeeAktuatorSinkKomputer Ethernet IEEE802.15.4/ZigBeeAktuatorAktuatorAktuator
PlantPlantPlantPlantPlantPlant

Model Sistem Kendali TersebarModel Sistem Kendali TersebarModel Sistem Kendali TersebarModel Sistem Kendali TersebarModel Sistem Kendali TersebarModel Sistem Kendali Tersebar
Sensor dan Pengendali Sensor dan PlantPengendali JaringanSensor dan
Besaran Fisika PlantPengendali JaringanSensor dan
Besaran Fisika PlantPengendali JaringanSensor dan Aktuator
Besaran Fisika PlantPengendali JaringanAktuator
Besaran Fisika PlantPengendali Aktuator PlantAktuator
Tundaan Tundaan Tundaan Tundaan Tundaan Tundaan WaktuWaktuWaktuWaktuWaktu
Kehilangan caτ scτ Kehilangan caτ cτscτ Kehilangan ca
kτ cτsckτ Kehilangan kτ
kτ kτ Kehilangan Data
kτ k
DataDataDataDataData

Sistem Kendali Tak Tersebar (Klasik)Sistem Kendali Tak Tersebar (Klasik)Sistem Kendali Tak Tersebar (Klasik)Sistem Kendali Tak Tersebar (Klasik)Sistem Kendali Tak Tersebar (Klasik)Sistem Kendali Tak Tersebar (Klasik)
er + e ur + e ur + e u
−−y
−yy
Menerapkan sistem kendali tak tersebar ini dalam lingkungan Menerapkan sistem kendali tak tersebar ini dalam lingkungan Menerapkan sistem kendali tak tersebar ini dalam lingkungan Menerapkan sistem kendali tak tersebar ini dalam lingkungan Menerapkan sistem kendali tak tersebar ini dalam lingkungan jaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawat
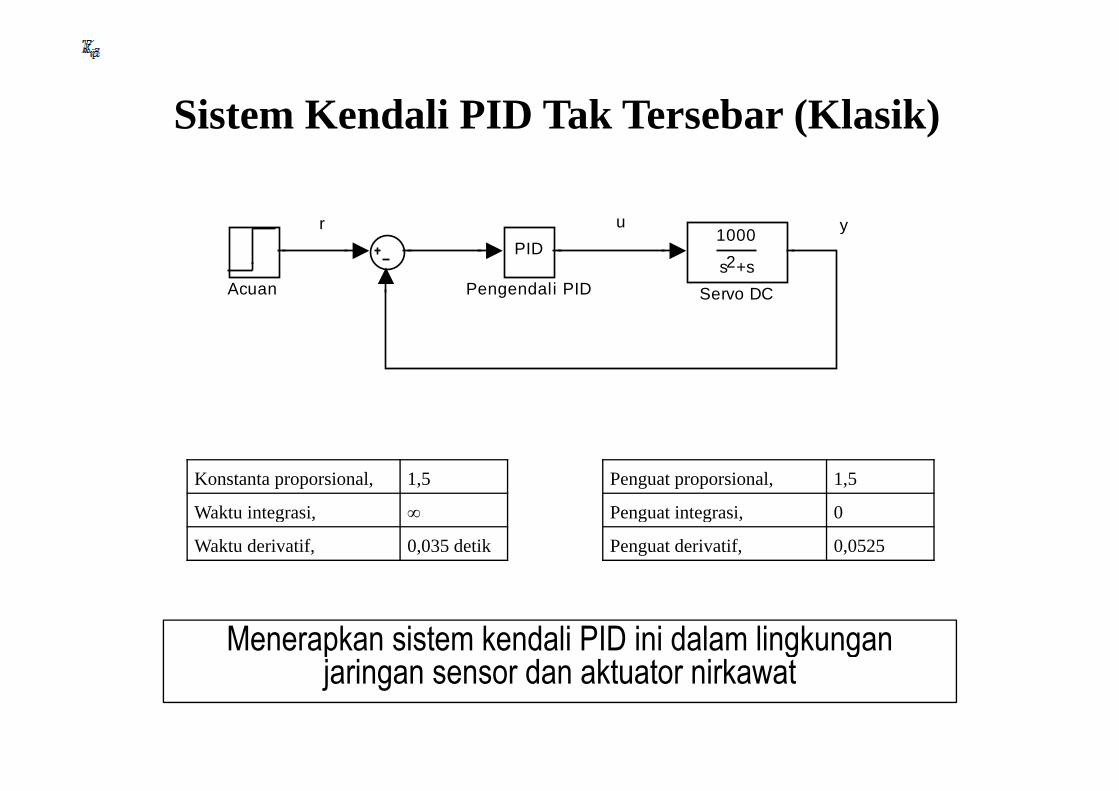
Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)
r u yr u y1000
r u y10001000
PID2
PIDs +s2
PIDs +s2s +s
Pengendali PIDAcuan Servo DCPengendali PIDAcuan Servo DCPengendali PIDAcuan Servo DC
Konstanta proporsional, 1,5 Penguat proporsional, 1,5Konstanta proporsional, 1,5 Penguat proporsional, 1,5Konstanta proporsional, 1,5 Penguat proporsional, 1,5
Waktu integrasi, ∞ Penguat integrasi, 0Waktu integrasi, ∞ Penguat integrasi, 0Waktu integrasi, ∞ Penguat integrasi, 0
Waktu derivatif, 0,035 detik Penguat derivatif, 0,0525Waktu derivatif, 0,035 detik Penguat derivatif, 0,0525Waktu derivatif, 0,035 detik Penguat derivatif, 0,0525
Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan jaringan sensor dan aktuator nirkawat
Menerapkan sistem kendali PID ini dalam lingkungan jaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawat

Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)
ur u yr u y1000
r u y1000
PID1000
PID2
PIDs +s2
PIDs +s2s +s
Pengendali PIDAcuan Servo DCPengendali PIDAcuan Servo DCPengendali PIDAcuan Servo DC
Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan jaringan sensor dan aktuator nirkawat
Menerapkan sistem kendali PID ini dalam lingkungan jaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawat

Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)Sistem Kendali PID Tak Tersebar (Klasik)
Sistem kendali tak tersebarSistem kendali tak tersebar1.5
Sistem kendali tak tersebar 1.5 1.5 1.5
acuanacuanacuan
keluarankeluarankeluaran
111
0.50.50.5
0 0 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
waktu dalam detikwaktu dalam detikwaktu dalam detik
Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan Menerapkan sistem kendali PID ini dalam lingkungan jaringan sensor dan aktuator nirkawat
Menerapkan sistem kendali PID ini dalam lingkungan jaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawatjaringan sensor dan aktuator nirkawat

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID Tersebar

Simulasi Sistem Kendali PID Tersebar Simulasi Sistem Kendali PID Tersebar Simulasi Sistem Kendali PID Tersebar Simulasi Sistem Kendali PID Tersebar Simulasi Sistem Kendali PID Tersebar Simulasi Sistem Kendali PID Tersebar dalam TRUETIMEdalam TRUETIMEdalam TRUETIMEdalam TRUETIMEdalam TRUETIMEdalam TRUETIME
u yu yr u yr1000
A/D D/A1: 1A/D 1: 21000
A/D D/A1: 1A/D 1: 21000
2A/D D/A1: 1A/D 1: 2
s +s2s +s2s +s
Servo Arus SearahAcuan Servo Arus SearahAcuan Servo Arus Searah
Titik Sensor/AktuatorTitik Pengendali Titik Sensor/AktuatorTitik Pengendali Titik Sensor/AktuatorTitik Pengendali
00xxx
11
yy
Jaringan NirkawatJaringan NirkawatIEEE 802.15.4/ZigBeeIEEE 802.15.4/ZigBee
2020
Sistem Kendali Tersebar Menggunakan Jaringan Sensor dan Aktuator NirkawatSistem Kendali Tersebar Menggunakan Jaringan Sensor dan Aktuator NirkawatSistem Kendali Tersebar Menggunakan Jaringan Sensor dan Aktuator Nirkawat© 2010 Copyleft by Abdul Haris Junus Ontowirjo© 2010 Copyleft by Abdul Haris Junus Ontowirjo© 2010 Copyleft by Abdul Haris Junus Ontowirjo
NIM 2207203001NIM 2207203001NIM 2207203001Laboratorium Komunikasi MultimediaLaboratorium Komunikasi MultimediaLaboratorium Komunikasi MultimediaInstitut Teknologi Sepuluh NopemberInstitut Teknologi Sepuluh NopemberInstitut Teknologi Sepuluh Nopember
SurabayaSurabayaSurabaya

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID Tersebar,
Sistem Kendali PID Tersebar, ,
, u yr
, u yr
A/D D/A1: 1A/D 1: 21000, A/D D/A1: 1A/D 1: 21000
s +s2
Konstanta proporsional, 1,5
, s +s2
Servo Arus SearahAcuan
Konstanta proporsional, 1,5Servo Arus SearahAcuan
Konstanta proporsional, 1,5Konstanta proporsional, 1,5Titik Sensor/AktuatorTitik Pengendali
Waktu integrasi, ∞
Titik Sensor/AktuatorTitik Pengendali
Waktu integrasi, ∞, Waktu integrasi, ∞, Waktu integrasi, ∞, Waktu derivatif, 0,035 detik
, Waktu derivatif, 0,035 detik0 Waktu derivatif, 0,035 detik0
x
1
Selang pencuplikan, 0,010 detiky
Selang pencuplikan, 0,010 detiky
Selang pencuplikan, 0,010 detikJaringan NirkawatJaringan Nirkawat
IEEE 802.15.4/ZigBee20
IEEE 802.15.4/ZigBee20
Sistem Kendali Tersebar Menggunakan Jaringan Sensor dan Aktuator Nirkawat© 2010 Copyleft by Abdul Haris Junus Ontowirjo© 2010 Copyleft by Abdul Haris Junus Ontowirjo
NIM 2207203001NIM 2207203001Laboratorium Komunikasi MultimediaLaboratorium Komunikasi MultimediaInstitut Teknologi Sepuluh NopemberInstitut Teknologi Sepuluh Nopember
SurabayaSurabaya
Minimum frame size 48 bitMinimum frame size 48 bitMinimum frame size 48 bit
Transmit power -24 dbmTransmit power -24 dbmTransmit power -24 dbm
Receiver signal threshold -94 dbmReceiver signal threshold -94 dbmReceiver signal threshold -94 dbmReceiver signal threshold -94 dbm
Distance 20 mDistance 20 mDistance 20 mDistance 20 m
Path loss exponent 3,5Path loss exponent 3,5Path loss exponent 3,5Path loss exponent 3,5

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID Tersebar, ,
Sistem Kendali PID Tersebar, , , , ,
, , , u yr, , u yr
A/D D/A1: 1A/D 1: 21000
Konstanta proporsional, 1,5, , A/D D/A1: 1A/D 1: 2
1000
s +s2 Konstanta proporsional, 1,5,
s +s2
Servo Arus SearahAcuan Konstanta proporsional, 1,5Servo Arus SearahAcuan
Waktu integrasi, ∞Waktu integrasi, ∞,
Titik Sensor/AktuatorTitik Pengendali Waktu integrasi, ∞
, ,Titik Sensor/AktuatorTitik Pengendali Waktu integrasi, ∞
, ,Waktu derivatif, 0,035 detik
, ,Waktu derivatif, 0,035 detik
, Waktu derivatif, 0,035 detik
, Waktu derivatif, 0,035 detik
, 0x
Selang pencuplikan, 0,010 detik, x
Selang pencuplikan, 0,010 detik,
1 Selang pencuplikan, 0,010 detikyy
Jaringan NirkawatJaringan NirkawatIEEE 802.15.4/ZigBee
20IEEE 802.15.4/ZigBee
20
Sistem Kendali Tersebar Menggunakan Jaringan Sensor dan Aktuator NirkawatSistem Kendali Tersebar Menggunakan Jaringan Sensor dan Aktuator Nirkawat© 2010 Copyleft by Abdul Haris Junus Ontowirjo© 2010 Copyleft by Abdul Haris Junus Ontowirjo
NIM 2207203001NIM 2207203001Laboratorium Komunikasi MultimediaLaboratorium Komunikasi MultimediaInstitut Teknologi Sepuluh NopemberInstitut Teknologi Sepuluh Nopember
SurabayaSurabaya
Minimum frame size 48 bitMinimum frame size 48 bitMinimum frame size 48 bit
Transmit power -24 dbmTransmit power -24 dbmTransmit power -24 dbm
Receiver signal threshold -94 dbmReceiver signal threshold -94 dbmReceiver signal threshold -94 dbmReceiver signal threshold -94 dbm
Distance 20 mDistance 20 mDistance 20 mDistance 20 m
Path loss exponent 3,5Path loss exponent 3,5Path loss exponent 3,5Path loss exponent 3,5
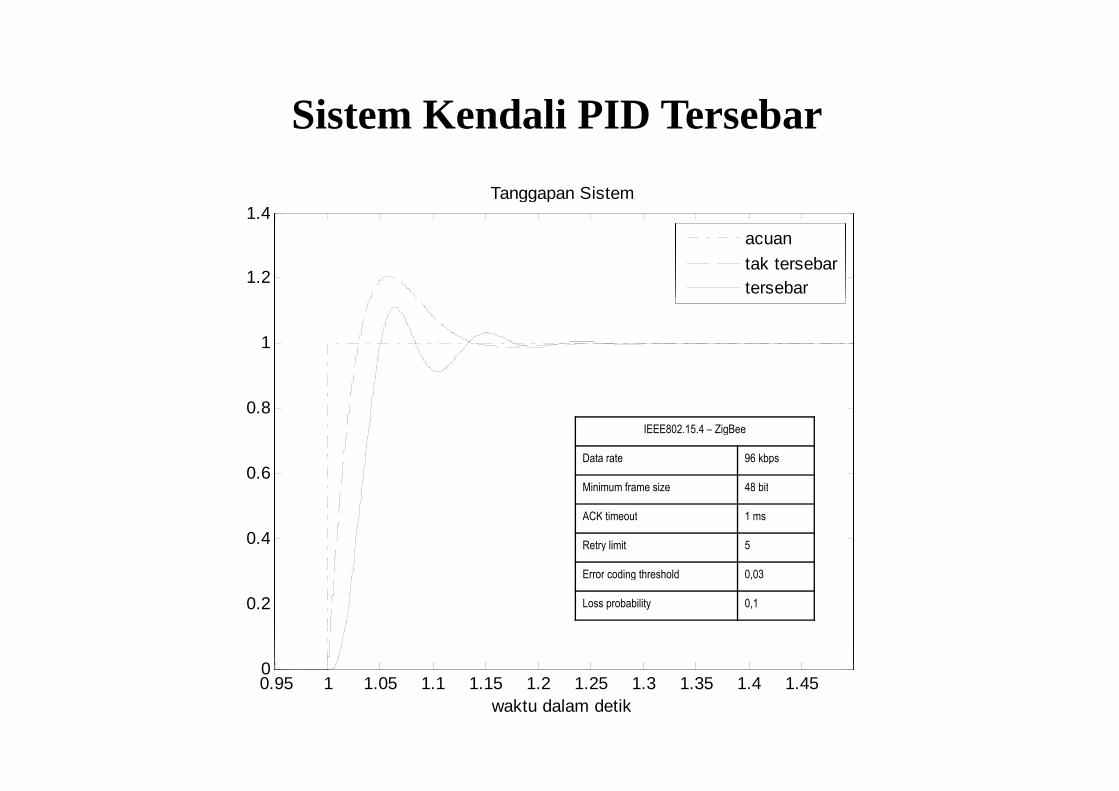
Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID Tersebar
Tanggapan SistemTanggapan SistemTanggapan Sistem1.4 1.4 1.4
acuanacuanacuanacuan
tak tersebartak tersebar1.2
tak tersebar1.2
tak tersebartersebar
1.2tersebartersebar
1111
0.80.80.8IEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBee
Data rate 96 kbps
0.6Data rate 96 kbps
0.60.6Minimum frame size 48 bit
0.6Minimum frame size 48 bitMinimum frame size 48 bit
ACK timeout 1 msACK timeout 1 ms
0.40.4 Retry limit 50.4 Retry limit 5
Error coding threshold 0,03Error coding threshold 0,03Error coding threshold 0,03
0.20.2 Loss probability 0,10.2 Loss probability 0,1
0 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
waktu dalam detikwaktu dalam detikwaktu dalam detik

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarTanggapan SistemTanggapan Sistem
1.4Tanggapan Sistem
1.4 1.4 1.4
1.21.21.2
111
0.80.80.8
IEEE802.15.4 – ZigBee
0.6IEEE802.15.4 – ZigBee
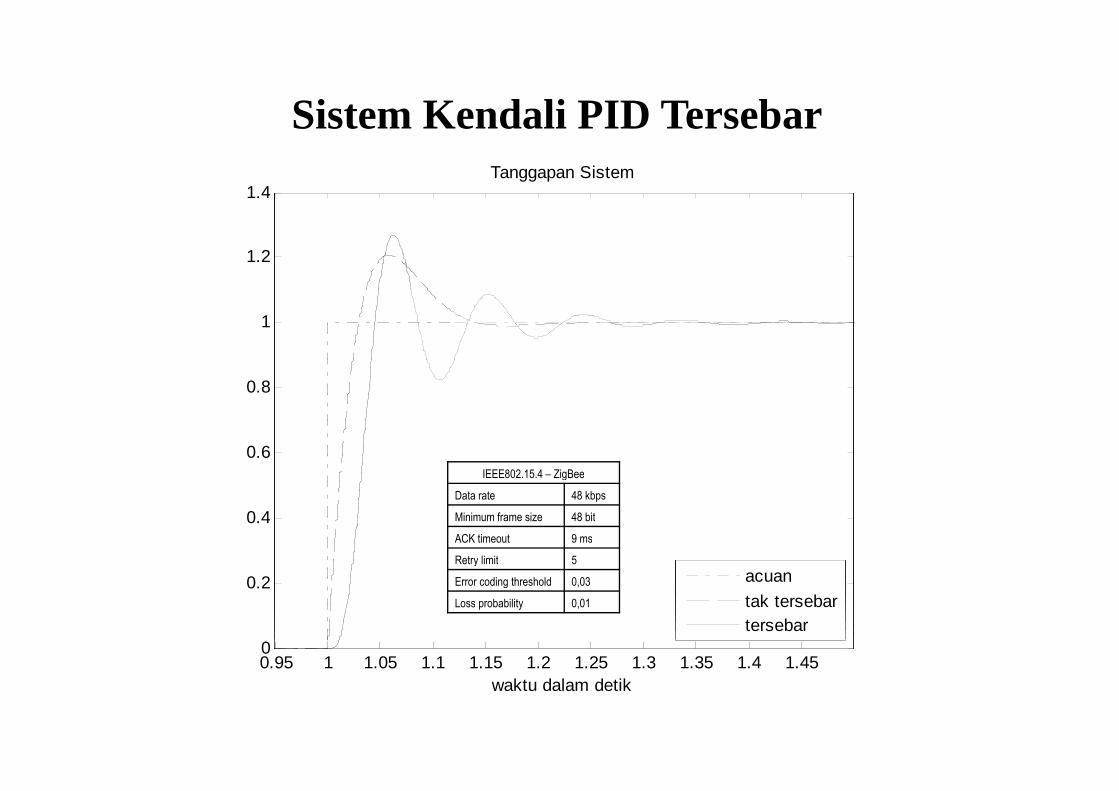
0.6 Data rate 48 kbps0.6 Data rate 48 kbpsData rate 48 kbps
Minimum frame size 48 bitMinimum frame size 48 bit
ACK timeout 1 msACK timeout 1 ms
0.4ACK timeout 1 ms
Retry limit 50.4 Retry limit 50.4 Retry limit 5
Error coding threshold 0,03Error coding threshold 0,03
Loss probability 0,1acuan
Loss probability 0,1
0.2 acuanLoss probability 0,1
0.2 acuan0.2tak tersebartak tersebartak tersebartersebartersebar
0tersebar
0 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
waktu dalam detikwaktu dalam detikwaktu dalam detik

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID Tersebar
Peluang Kehilangan 0,1 dan Tundaan Maksimum 5 msPeluang Kehilangan 0,1 dan Tundaan Maksimum 5 ms5
Peluang Kehilangan 0,1 dan Tundaan Maksimum 5 ms 5 5
acuanacuan4
acuan4 tak tersebar4 tak tersebartak tersebar
tersebartersebar3
tersebar3
tersebar33
222
111
000
-1 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
-1 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
-1 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
waktu dalam detikwaktu dalam detikwaktu dalam detik
IEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBee
Data rate 24 kbpsData rate 24 kbpsData rate 24 kbps
Minimum frame size 48 bitMinimum frame size 48 bitMinimum frame size 48 bit
ACK timeout 1 msACK timeout 1 msACK timeout 1 ms
Retry limit 5Retry limit 5
Error coding threshold 0,03Error coding threshold 0,03Error coding threshold 0,03
Loss probability 0,1Loss probability 0,1

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarTanggapan SistemTanggapan Sistem
1.4Tanggapan Sistem
1.4 1.4
1.21.21.2
111
0.80.80.80.8
0.60.60.6IEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBee
Data rate 24 kbpsData rate 24 kbpsData rate 24 kbps
0.4 Minimum frame size 48 bit0.4 Minimum frame size 48 bit0.4 Minimum frame size 48 bit
ACK timeout 1 ms0.4
ACK timeout 1 msACK timeout 1 ms
Retry limit 5Retry limit 5
acuanError coding threshold 0,030.2 acuanError coding threshold 0,030.2 acuanError coding threshold 0,030.2tak tersebarLoss probability 0,01 tak tersebarLoss probability 0,01 tak tersebartersebartersebar
0 tersebar
0 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
0 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
0 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
waktu dalam detikwaktu dalam detikwaktu dalam detik

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarTanggapan SistemTanggapan Sistem
1.4Tanggapan Sistem
1.4 1.4 1.4
1.21.21.2
111
0.80.80.8
IEEE802.15.4 – ZigBee
0.6IEEE802.15.4 – ZigBee
0.6 Data rate 36 kbps0.6 Data rate 36 kbpsData rate 36 kbps
Minimum frame size 48 bitMinimum frame size 48 bit
ACK timeout 1 msACK timeout 1 ms
0.4ACK timeout 1 ms
Retry limit 50.4 Retry limit 50.4 Retry limit 5
Error coding threshold 0,03Error coding threshold 0,03
Loss probability 0,01acuan
Loss probability 0,01
0.2 acuanLoss probability 0,01
0.2 acuan0.2tak tersebartak tersebartak tersebartersebartersebar
0tersebar
0 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
waktu dalam detikwaktu dalam detikwaktu dalam detik

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID Tersebar
Peluang Kehilangan 0,1 dan Tundaan Maksimum 45 msPeluang Kehilangan 0,1 dan Tundaan Maksimum 45 ms2.5
Peluang Kehilangan 0,1 dan Tundaan Maksimum 45 ms 2.5 2.5
acuanacuanacuan
2 tak tersebar2 tak tersebar2 tak tersebartersebartersebartersebartersebar
1.51.51.51.5
111
0.50.50.5
00 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
0 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
0 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
waktu dalam detikwaktu dalam detikwaktu dalam detikIEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBee
Data rate 48 kbpsData rate 48 kbpsData rate 48 kbps
Minimum frame size 48 bitMinimum frame size 48 bit
ACK timeout 9 msACK timeout 9 msACK timeout 9 ms
Retry limit 5Retry limit 5
Error coding threshold 0,03Error coding threshold 0,03Error coding threshold 0,03
Loss probability 0,1Loss probability 0,1

Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID Tersebar
Peluang Kehilangan 0,1 dan Tundaan Maksimum 35 msPeluang Kehilangan 0,1 dan Tundaan Maksimum 35 msPeluang Kehilangan 0,1 dan Tundaan Maksimum 35 ms6
Peluang Kehilangan 0,1 dan Tundaan Maksimum 35 ms 6 6
acuanacuanacuan
tak tersebar4 tak tersebar4 tak tersebar4 tak tersebartersebartersebartersebar
222
000
-2-2-2
-4 -4 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
-4 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2
waktu dalam detikwaktu dalam detikwaktu dalam detikwaktu dalam detik
IEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBee
Data rate 48 kbpsData rate 48 kbpsData rate 48 kbps
Minimum frame size 48 bitMinimum frame size 48 bit
ACK timeout 7 msACK timeout 7 msACK timeout 7 ms
Retry limit 5Retry limit 5
Error coding threshold 0,03Error coding threshold 0,03Error coding threshold 0,03
Loss probability 0,1Loss probability 0,1
Sistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarSistem Kendali PID TersebarTanggapan SistemTanggapan Sistem
1.4Tanggapan Sistem
1.4 1.4
1.21.21.2
111
0.80.80.80.8
0.60.60.6IEEE802.15.4 – ZigBeeIEEE802.15.4 – ZigBee
Data rate 48 kbpsData rate 48 kbps
0.4Data rate 48 kbps
0.4 Minimum frame size 48 bit0.4 Minimum frame size 48 bit0.4ACK timeout 9 msACK timeout 9 msACK timeout 9 ms
Retry limit 5
acuanRetry limit 5
0.2 acuanError coding threshold 0,030.2 acuanError coding threshold 0,030.2tak tersebar
Error coding threshold 0,03
tak tersebarLoss probability 0,01 tak tersebarLoss probability 0,01
tersebartersebar0
tersebar0 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45
waktu dalam detikwaktu dalam detikwaktu dalam detik
KesimpulanKesimpulanKesimpulanKesimpulanKesimpulanKesimpulan
Model yang dibangun untuk mensimulasikan ini telah mencerminkan Model yang dibangun untuk mensimulasikan ini telah mencerminkan Model yang dibangun untuk mensimulasikan ini telah mencerminkan Model yang dibangun untuk mensimulasikan ini telah mencerminkan Model yang dibangun untuk mensimulasikan ini telah mencerminkan
aspek-aspek penting dari sistem nyata. aspek-aspek penting dari sistem nyata. aspek-aspek penting dari sistem nyata. aspek-aspek penting dari sistem nyata. aspek-aspek penting dari sistem nyata.
Sumber ketidakstabilan bisa diatasi hingga pada batas nilai parameter Sumber ketidakstabilan bisa diatasi hingga pada batas nilai parameter Sumber ketidakstabilan bisa diatasi hingga pada batas nilai parameter Sumber ketidakstabilan bisa diatasi hingga pada batas nilai parameter Sumber ketidakstabilan bisa diatasi hingga pada batas nilai parameter
jaringan tertentu.jaringan tertentu.jaringan tertentu.jaringan tertentu.jaringan tertentu.
Tesis ini telah menunjukkan bahwa pengendali PID tetap bisa Tesis ini telah menunjukkan bahwa pengendali PID tetap bisa Tesis ini telah menunjukkan bahwa pengendali PID tetap bisa Tesis ini telah menunjukkan bahwa pengendali PID tetap bisa Tesis ini telah menunjukkan bahwa pengendali PID tetap bisa
digunakan walaupun dalam lingkungan jaringan nirkabel terutama digunakan walaupun dalam lingkungan jaringan nirkabel terutama digunakan walaupun dalam lingkungan jaringan nirkabel terutama digunakan walaupun dalam lingkungan jaringan nirkabel terutama digunakan walaupun dalam lingkungan jaringan nirkabel terutama digunakan walaupun dalam lingkungan jaringan nirkabel terutama
IEEE 802.15.4 ZigBeeIEEE 802.15.4 ZigBeeIEEE 802.15.4 ZigBeeIEEE 802.15.4 ZigBeeIEEE 802.15.4 ZigBee
Tesis ini melakukan hanya dengan tundaan waktu di bawah satu kali Tesis ini melakukan hanya dengan tundaan waktu di bawah satu kali Tesis ini melakukan hanya dengan tundaan waktu di bawah satu kali Tesis ini melakukan hanya dengan tundaan waktu di bawah satu kali Tesis ini melakukan hanya dengan tundaan waktu di bawah satu kali
pencuplikan dan maksimum usaha pengiriman kembali 5, setelah itu pencuplikan dan maksimum usaha pengiriman kembali 5, setelah itu pencuplikan dan maksimum usaha pengiriman kembali 5, setelah itu pencuplikan dan maksimum usaha pengiriman kembali 5, setelah itu pencuplikan dan maksimum usaha pengiriman kembali 5, setelah itu
paket dianggap hilang.paket dianggap hilang.paket dianggap hilang.paket dianggap hilang.paket dianggap hilang.paket dianggap hilang.

SaranSaranSaranSaranSaranSaranSistem yang dibangun merupakan wahana bagi penelitian tentang sistem kendali tersebar Sistem yang dibangun merupakan wahana bagi penelitian tentang sistem kendali tersebar Sistem yang dibangun merupakan wahana bagi penelitian tentang sistem kendali tersebar Sistem yang dibangun merupakan wahana bagi penelitian tentang sistem kendali tersebar dengan satu titik pengendali dan satu titik sensor-aktuator dalam jaringan IEEE dengan satu titik pengendali dan satu titik sensor-aktuator dalam jaringan IEEE dengan satu titik pengendali dan satu titik sensor-aktuator dalam jaringan IEEE dengan satu titik pengendali dan satu titik sensor-aktuator dalam jaringan IEEE 802.15.4/ZigBee. Alangkah baiknya bila diterapkan algoritma strategi pengendalian lain 802.15.4/ZigBee. Alangkah baiknya bila diterapkan algoritma strategi pengendalian lain 802.15.4/ZigBee. Alangkah baiknya bila diterapkan algoritma strategi pengendalian lain seperti model predictif, bahkan anfis802.15.4/ZigBee. Alangkah baiknya bila diterapkan algoritma strategi pengendalian lain seperti model predictif, bahkan anfisseperti model predictif, bahkan anfisseperti model predictif, bahkan anfisseperti model predictif, bahkan anfis
Sistem ini tidak bisa melakukan evaluasi numerik terhadap kinerja yang dibangun akibat Sistem ini tidak bisa melakukan evaluasi numerik terhadap kinerja yang dibangun akibat Sistem ini tidak bisa melakukan evaluasi numerik terhadap kinerja yang dibangun akibat Sistem ini tidak bisa melakukan evaluasi numerik terhadap kinerja yang dibangun akibat perubahan parameter. Alangkah baiknya bila setelah penentuan parameter dalam titik perubahan parameter. Alangkah baiknya bila setelah penentuan parameter dalam titik perubahan parameter. Alangkah baiknya bila setelah penentuan parameter dalam titik pengendali, kinerja sistem dievaluasi dengan perangkat lunak seperti Jitterbug atau yang perubahan parameter. Alangkah baiknya bila setelah penentuan parameter dalam titik pengendali, kinerja sistem dievaluasi dengan perangkat lunak seperti Jitterbug atau yang pengendali, kinerja sistem dievaluasi dengan perangkat lunak seperti Jitterbug atau yang pengendali, kinerja sistem dievaluasi dengan perangkat lunak seperti Jitterbug atau yang lain.pengendali, kinerja sistem dievaluasi dengan perangkat lunak seperti Jitterbug atau yang lain.lain.lain.lain.
Sistem yang dibangun ini pula merupakan arisitektur titik tunggal, yang artinya hanya Sistem yang dibangun ini pula merupakan arisitektur titik tunggal, yang artinya hanya Sistem yang dibangun ini pula merupakan arisitektur titik tunggal, yang artinya hanya Sistem yang dibangun ini pula merupakan arisitektur titik tunggal, yang artinya hanya melibatkan satu titik sensor-aktuator. Untuk menyelidiki pengaruh kebijakan penjadwalan melibatkan satu titik sensor-aktuator. Untuk menyelidiki pengaruh kebijakan penjadwalan melibatkan satu titik sensor-aktuator. Untuk menyelidiki pengaruh kebijakan penjadwalan terhadap kinerja sistem perlu dibuat arsitektur titik jamak, walaupun dengan titik melibatkan satu titik sensor-aktuator. Untuk menyelidiki pengaruh kebijakan penjadwalan terhadap kinerja sistem perlu dibuat arsitektur titik jamak, walaupun dengan titik terhadap kinerja sistem perlu dibuat arsitektur titik jamak, walaupun dengan titik terhadap kinerja sistem perlu dibuat arsitektur titik jamak, walaupun dengan titik pengendali tunggal, tapi titik sensor-aktuator dibuat lebih dari satu agar lalulintas data terhadap kinerja sistem perlu dibuat arsitektur titik jamak, walaupun dengan titik pengendali tunggal, tapi titik sensor-aktuator dibuat lebih dari satu agar lalulintas data pengendali tunggal, tapi titik sensor-aktuator dibuat lebih dari satu agar lalulintas data pengendali tunggal, tapi titik sensor-aktuator dibuat lebih dari satu agar lalulintas data dalam jaringan meningkat sehingga masalah penjadwalan menjadi krusial.dalam jaringan meningkat sehingga masalah penjadwalan menjadi krusial.dalam jaringan meningkat sehingga masalah penjadwalan menjadi krusial.dalam jaringan meningkat sehingga masalah penjadwalan menjadi krusial.
Kedekatan simulasi ini terhadap sistem yang nyata adalah masalah yang harus dijawab Kedekatan simulasi ini terhadap sistem yang nyata adalah masalah yang harus dijawab Kedekatan simulasi ini terhadap sistem yang nyata adalah masalah yang harus dijawab Kedekatan simulasi ini terhadap sistem yang nyata adalah masalah yang harus dijawab yaitu dengan mengembangkan antar-muka dari perangkat lunak pengendali (seperti Kedekatan simulasi ini terhadap sistem yang nyata adalah masalah yang harus dijawab yaitu dengan mengembangkan antar-muka dari perangkat lunak pengendali (seperti yaitu dengan mengembangkan antar-muka dari perangkat lunak pengendali (seperti yaitu dengan mengembangkan antar-muka dari perangkat lunak pengendali (seperti MATLAB dan Modelica) di komputer dan titik sensor-aktuator. Dengan adanya antar muka yaitu dengan mengembangkan antar-muka dari perangkat lunak pengendali (seperti MATLAB dan Modelica) di komputer dan titik sensor-aktuator. Dengan adanya antar muka MATLAB dan Modelica) di komputer dan titik sensor-aktuator. Dengan adanya antar muka MATLAB dan Modelica) di komputer dan titik sensor-aktuator. Dengan adanya antar muka yang tersedia, maka akan terbuka pengembangan algoritma-algoritma kendali apa saja yang tersedia, maka akan terbuka pengembangan algoritma-algoritma kendali apa saja yang tersedia, maka akan terbuka pengembangan algoritma-algoritma kendali apa saja yang tersedia, maka akan terbuka pengembangan algoritma-algoritma kendali apa saja untuk diterapkan pada jaringan sensor nirkawat.untuk diterapkan pada jaringan sensor nirkawat.untuk diterapkan pada jaringan sensor nirkawat.untuk diterapkan pada jaringan sensor nirkawat.


















