
SIPART PS2 6DR400x-xx SIPART PS2 PA 6DR410x-xx · 5 1 Galet montage avec la broche d...
96
SIPART PS2 6DR400x-xx SIPART PS2 PA 6DR410x-xx Positionneur électropneumatique pour servomoteurs linéaires et à fraction de tour Posizionatore elettropneumatico per attuatori lineari e a rotazione Posicionador electroneumático para accionamientos lineal y de giro Notice de montage et d’installation Istruzioni di montaggio e installazione Instrucciones de montaje e instalación C79000-M7450-C156-01
Transcript of SIPART PS2 6DR400x-xx SIPART PS2 PA 6DR410x-xx · 5 1 Galet montage avec la broche d...

SIPART PS2 6DR400x-xxSIPART PS2 PA 6DR410x-xxPositionneur électropneumatique pour servomoteurs linéaires et à fraction de tour
Posizionatore elettropneumatico per attuatori lineari e a rotazione
Posicionador electroneumático paraaccionamientos lineal y de giroNotice de montage et d’installationIstruzioni di montaggio e installazioneInstrucciones de montaje e instalación C79000-M7450-C156-01

SIPART, SITRANS, SIMATICsont des marques déposées de Siemens. D’autres dénominations utilisées dans ce document peuvent également être des marques déposées dontl’utilisation par des tiers à leurs propres fins peut enfreindre les droits des propriétaires desdites marques.
SIPART, SITRANS, SIMATICsono marchi registrati Siemens.Le denominazioni di altri prodotti menzionati in questa documentazione possono essere marchi il cui uso daparte di terzi può violare i diritti di proprietà.
SIPART, SITRANS, SIMATICson marcas registradas de Siemens.Las otras designaciones que figuran en este documento puenden ser marcas cuya utilización por terceros parasus propios fines puede violar los derechos de los proprietarios de dichas marcas.
Toute communication ou reproduction de ce document, toute exploitation ou communication de son contenu sont interdites, sauf autorisationexpresse. Tout manquement à cette règle est illicite et expose son auteur au versement de dommages et intérêts. Tours nos droits sontréservés pour le cas de la délivrance d’un brevet ou celui de l’enregistrement d’un modèle d’utilité.Modifications techniques sont réservées
La trasmissione a terzi e la riproduzione di questa documentazione, cosiccome lo sfruttamento del suo contenuto non è permesso, se nonautorizzato per iscritto. Le infrazioni comporteranno una richiesta di danni. Tutti i diritti sono riservati, in particolare nel caso di brevetti.Modifiche tecniche possibili.
La divulgación y reproducción de este documento asi como el aprovechamiento de su contenido, no están autorizados, a no ser que seobtenga el consentimiento expreso, para ello. Los infractores quedan obligados a la indemnización por daños y perjucios. Se reservan todoslos derechos, en particular para el caso de concesion de Patente o de Modelo de Utilidad.Salvo modificaciones ténicas
C79000-M7450-C156-01
SommairePage
1 Consignes de sécurité 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1 Signification des marques d’avertissement 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Introduction 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Etendue de livraison du positionneur 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Montage 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 Généralités 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Jeu de pièces de montage ”servomoteur linéaire” 6DR4004–8V et 6DR4004–8L 6. . . . . . . . . . . . . . . 3.2.1 Montage (voir fig. 1) 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Jeu de pièces de montage ”servomoteur à fraction de tour” 6DR4004–8D 8. . . . . . . . . . . . . . . . . . . . . 3.3.1 Montage (voir fig. 2) 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Modules optionnels (voir fig. 3 en annexe) 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Raccordement électrique 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Raccordement pneumatique (voir fig. 16 en annexe) 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Mise en service (voir Dépliant ”Brèves instructions d’utilisation”) 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1 Préparatifs pour les servomoteurs linéaires 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1.1 Initialisation des servomoteurs linéaires 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2 Préparatifs pour les servomoteurs à fraction de tour 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2.1 Initialisation des servomoteurs à fraction de tour 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Conformité 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figures 3 à 17 en annexe
L’indice si travo alla pagina 35
Indice véase página 67
C79000-M7450-C156-01
1 Consignes de sécurité
1.1 Signification des marques d’avertissement
!Avertissement
signifie que la non application des mesures de précaution appropriées peut conduire à la mort, àdes lésions corporelles graves ou à un dommage matériel important.
!Attention
signifie que la non application des mesures de précaution appropriées peut conduire à des lésionscorporelles légères et/ou à un dommage matériel.
Nota
représente une information importante relative au produit, à sa manipulation ou à une partie dumanuel qu’il importe de mettre en relief.
1.2 Introduction
La présente notice de montage et d’installation fait office d’instructions de service conformément à la directivedu Parlement Européen et du Conseil du 23 mars 1994 (94/9/CE). Elle décrit les étapes fondamentales demontage, de raccordement et de mise en service.
La notice de montage et d’installation ne remplace pas le manuel d’utilisation du positionneur électropneumatiqueSIPART PS2. Le manuel contient des informations plus détaillées sur sa constitution, son fonctionnement et sonutilisation. Le manuel d’utilisation peut être commandé sous la référence
C79000–G7400–C158 (allemand)C79000–G7476–C158 (anglais)
auprès de nos agence Siemens. La notice de montage et d’installation ainsi que le manuel sont valables pourl’électropositionneur avec ou sans communication via PROFIBUS PA. Les différences sont repérées enconséquence.
Utilisation sans dangerCet appareil a quitté nos usines dans un état parfaitement conforme aux normes de sécurité. Pour le conserverdans cet état et pour assurer la sécurité lors de l’exploitation de l’appareil, il importe de respecter les consigneset les marques d’avertissement données dans cette notice de montage et d’installation.
Personnes qualifiéesAu sens de cette notice de montage et d’installation, les personnes qualifiées sont des personnes qui sont familia-risées avec le montage, la mise en service et l’exploitation de ce produit, et qui disposent d’une qualificationcorrespondant à leur activité, comme par exemple:
une formation, une instruction ou une autorisation permettant la mise sous tension et hors tension, la miseà la terre et le repérage des circuits électriques, des appareils ou des systèmes, en conformité avec lesnormes de sécurité en vigueur;
une formation ou une instruction conforme aux normes de sécurité, permettant l’entretien et l’utilisationd’équipements de sécurité;
une formation de premiers secours; pour les appareils antidéflagrants: une formation, une instruction ou une autorisation permettant l’exécution
de travaux sur des circuits électriques en atmosphère à risque d’explosion.
!Avertissement
Seules des personnes qualifiées sont autorisées à monter cet appareil et à le mettre en service.L’appareil est conçu pour être raccordé à des faibles tensions de fonction ou de protection.La sécurité électrique est uniquement assurée par les appareils d’alimentation.Les servomoteurs pneumatiques produisent des forces de poussée importantes. Pour éviter desdommages corporels, il est nécessaire de réaliser le montage et la mise en service en respectantrigoureusement les consignes de sécurité. Nous attirons expressément l’attention sur l’observation des prescriptions de sécurité pour lesinstallations en atmosphère à risque d’explosion.
Le fonctionnement correct et sûr de cet appareil présuppose un transport, un stockage et un montage conformesaux règles de l’art, ainsi qu’un service et un entretien rigoureux.

C79000-M7450-C156-01
2 Etendue de livraison du positionneur
Positionneur, conformément à la commande
Exécution SIPART PS2 Nr. de réf.
SIPART PS2 PA Nr. de réf.
à simple effet, boîtier plastique 6DR4000–1N 6DR4100–1N
à double effet, boîtier plastique 6DR4000–2N 6DR4100–2N
à simple effet, en sécurité intrinsèque, boîtier plastique 6DR4000–1E (PTB)6DR4000–1F (FM)
6DR4100–1E (PTB)
à double effet, en sécurité intrinsèque, boîtier plastique 6DR4000–2E (PTB)6DR4000–2F (FM)
6DR4100–2E (PTB)
à simple effet, boîtier métallique 6DR4001–1N 6DR4101–1N
à simple effet, en sécurité intrinsèque, boîtier métallique 6DR4001–1E (PTB)6DR4001–1F (FM)
6DR4101–1E (PTB)
Notice de montage et d’installation allemand / anglais (avec l’appareil) Dépliant ”Brèves instructions d’utilisation” allemand et anglais (dans l’appareil)
3 Montage
3.1 Généralités
!Avertissement
Le positionneur et ses modules optionnels sont livrés en tant qu’unités séparées et en différentesexécutions. Il existe des positionneurs et des modules optionnels pour l’exploitation en zoneexplosible et non explosible. Ces variantes d’exécutions sont respectivement repérées par uneplaque signalétique spécifique.
Il convient de s’assurer de n’associer que des positionneurs et des modules optionnels homologuéspour le domaine d’exploitation correspondant. Ceci s’applique en particulier à l’exploitation sûre dupositionneur en zone à risque d’explosion (zones 1 et 2). Les catégories d’appareil (2 et 3) sont àrespecter impérativement pour l’appareil lui–même ainsi que pour ses options.
!Avertissement
Pour éviter des dommages corporels ou des dommages mécaniques du positionneur/jeu de piècesde montage, le montage est à exécuter impérativement dans l’ordre suivant:
1. Montage mécanique du positionneur voir chapitre 3 (suivant la variante d’exécution)
2. Raccordement électrique voir chapitre 5
3. Raccordement pneumatique voir chapitre 6
4. Mise en service voir chapitre 7

C79000-M7450-C156-01
3.2 Jeu de pièces de montage ”servomoteur linéaire” 6DR4004–8V et 6DR4004–8L
Le jeu de pièces de montage ”servomoteur linéaire IEC534 (3mm à 35mm)” comprend (numéros, voir fig. 1):
Nº Pièce Désignation Remarque
1 1 Cornière de fixationNAMUR IEC 534
pièce de fixation normalisée pour la console de montage avec nervure, colonneou surface lisse.
2 1 Etrier de liaison guide le galet avec la broche d’entraînement et fait tourner le bras de levier
3 2 Pièces de serrage montage de l’étrier de liaison à la tige du servomoteur
4 1 Broche d’entraînement montage avec le galet (5) sur le levier (6)
5 1 Galet montage avec la broche d’entraînement (4) sur le levier (6)
6 1 Levier NAMUR pour plages de course 3 mm à 35 mm ; pour plages de course > 35 mm à 130 mm (non compris dans l’étendue de livrai-son), levier 6DR4004–8L nécessaire en outre
7 2 Boulon en U uniquement pour des servomoteurs à colonnes
8 4 Vis six pans M8 x 20 DIN 933–A2
9 2 Vis six pans M8 x 16 DIN 933–A2
10 6 Bague–ressort A8 – DIN 127–A2
11 6 Rondelle en U B 5,4 – DIN 125–A2
12 2 Rondelle en U B 6,4 – DIN 125–A2
13 1 Ressort VD–115E 0,70x11,3x32,7x3,5
14 1 Rondelle–ressort A6 – DIN 137A–A2
15 1 Rondelle de sécurité 3,2 – DIN 6799–A2
16 3 Bague–ressort A6 – DIN 127–A2
17 3 Vis six pans M6 x 25 DIN 933–A2
18 1 Ecrou six pans M6 – DIN 934–A4
19 1 Ecrou carré M6 – DIN 557–A4
21 4 Ecrou six pans M8 – DIN 934–A4
22 1 Rondelle–guide 6,2x9,9x15x3,5
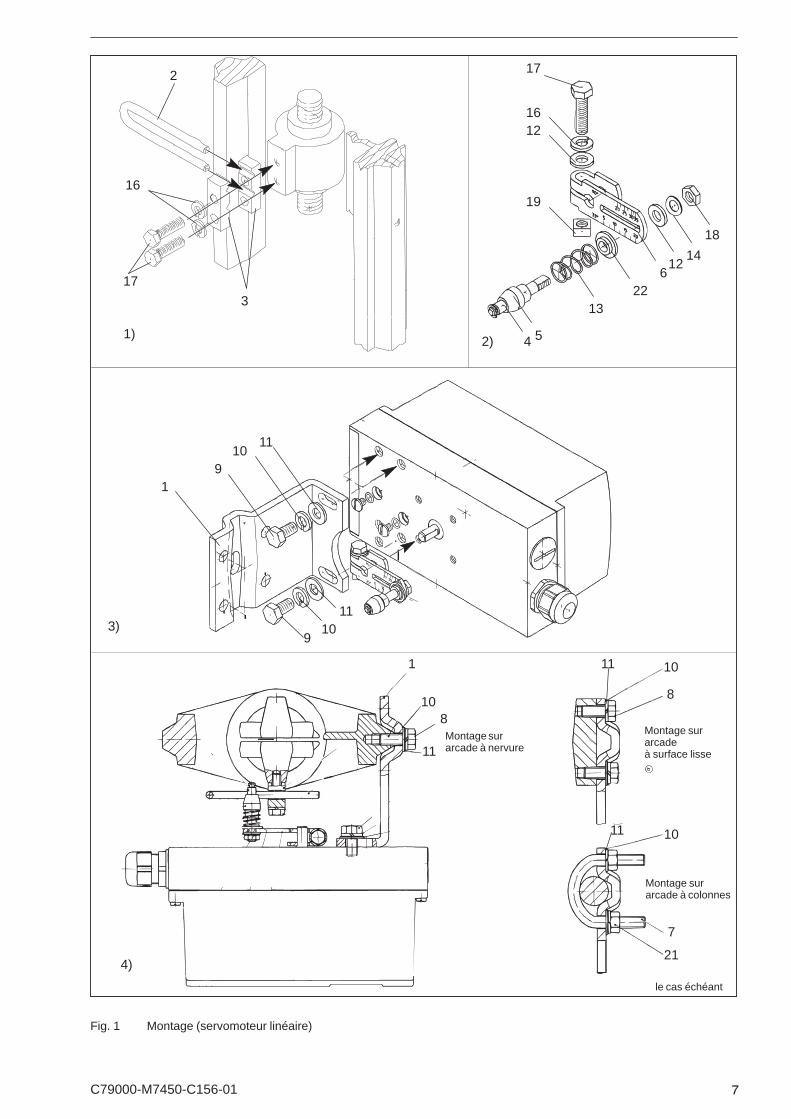
3.2.1 Montage (voir fig. 1)
1. Monter les pièces de serrage (3) sur la tige du servomoteur, avec les vis six pans (17) et les bague–ressorts(16).
2. Glisser l’étrier de liaison (2) dans les fraisures des pièces de serrage. Régler la longueur voulue et serrerles vis de façon à ce que l’étrier de liaison puisse encore coulisser.
3. Enfiler le galet (5), le ressort (13) et la rondelle–guide (22) sur la broche (4).4. Monter la broche dans le levier (6) et la fixer avec l’écrou (18), la rondelle–ressort (14) et la rondelle (12).5. Régler la valeur de la plage de course indiquée sur le servomoteur ou, si cette valeur n’est pas disponible
sur l’échelle, la valeur supérieure la plus proche. Le milieu de la broche doit être placé sur la valeur d’échelle.La même valeur est à régler ensuite, lors de la mise en service, sous 3.YWAY, pour visualiser la course enmm après l’initialisation.
6. Monter la vis six pans (17), la bague–ressort (16), la rondelle (12) et l’écrou carré (19) sur le levier.7. Glisser le levier ainsi préparé sur l’arbre du positionneur jusqu’en butée puis le fixer avec la vis six pans (17).8. Monter la cornière de fixation (1) sur la face arrière du positionneur, avec deux vis six pans (9), une bague–
ressort (10) et une rondelle en U (11).9. Le choix des trous est fonction de la largeur de l’arcade du servomoteur. Le galet (5) doit se placer dans
l’étrier de liaison (2) aussi près que possible de la tige, sans toutefois toucher les pièces de serrage.10. Tenir le positionneur avec la cornière de fixation sur le servomoteur de manière que la broche (4) soit amenée
dans l’étrier de liaison (2).11. Serrer les vis de l’étrier de liaison.12. Préparer les pièces de montage suivant le type de servomoteur.
– à nervure: vis six pans (8), rondelle (11) et rondelle–ressort (10).– à surface lisse: 4 vis six pans (8) avec rondelle (11) et rondelle–ressort (10).– à colonnes: 2 boulons en U (7), 4 écrous six pans (21) avec rondelle (11) et bague–ressort (10).
13. Fixer le positionneur à l’arcade à l’aide des pièces préparées.
Régler la hauteur du positionneur de façon que la position horizontale du levier soit atteinte aumilieu de la course. Pour ce faire, il est possible de s’orienter à l’échelle du levier du servomoteur.En tous cas, s’assurer que le levier passe par la position horizontale pendant la plage de course.
C79000-M7450-C156-01
le cas échéant
Montage sur arcade à colonnes
Montage sur arcadeà surface lisse
Montage surarcade à nervure
2)
4)
4 5
1322
612
14
19
1216
17
8
1
10
11
7
21
11 10
11
8
10
18
3)9
1011
910
11
1
1)
2
17
16
3
Fig. 1 Montage (servomoteur linéaire)
C79000-M7450-C156-01
3.3 Jeu de pièces de montage ”servomoteur à fraction de tour” 6DR4004–8D
Le jeu de pièces de montage ”servomoteur à fraction de tour comprend (numéros, voir fig. 2):
Nº Pièce Désignation Remarque2 1 Roue d’accouplement montage sur l’arbre de transmission de position du SIPART PS23 1 Entraînement montage sur le bout d’arbre du servomoteur4 1 Etiquette indication de la position du servomoteur, comprend: 4.1 et 4.24.1 8 Echelle différentes graduations4.2 1 Aiguille de repère point de référence pour l’échelle (autocollant)14 4 Vis six pans DIN 933 – M6 x 1215 4 Rondelle de sécurité S616 1 Vis à tête cylindrique DIN 84 – M6 x 1217 1 Rondelle DIN 125 – 6,418 1 Vis à six pans creux montée avec la roue d’accouplement19 1 Clé à six pans creux pour la pièce18
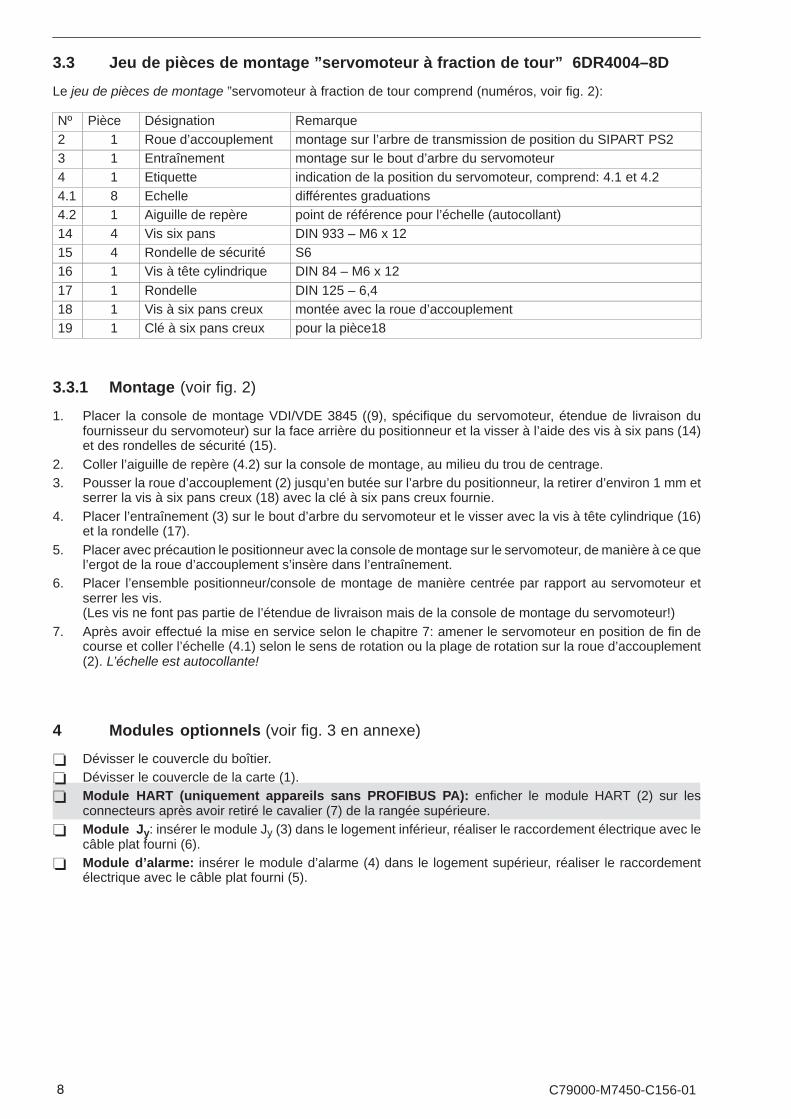
3.3.1 Montage (voir fig. 2)
1. Placer la console de montage VDI/VDE 3845 ((9), spécifique du servomoteur, étendue de livraison dufournisseur du servomoteur) sur la face arrière du positionneur et la visser à l’aide des vis à six pans (14)et des rondelles de sécurité (15).
2. Coller l’aiguille de repère (4.2) sur la console de montage, au milieu du trou de centrage.3. Pousser la roue d’accouplement (2) jusqu’en butée sur l’arbre du positionneur, la retirer d’environ 1 mm et
serrer la vis à six pans creux (18) avec la clé à six pans creux fournie.4. Placer l’entraînement (3) sur le bout d’arbre du servomoteur et le visser avec la vis à tête cylindrique (16)
et la rondelle (17).5. Placer avec précaution le positionneur avec la console de montage sur le servomoteur, de manière à ce que
l’ergot de la roue d’accouplement s’insère dans l’entraînement.6. Placer l’ensemble positionneur/console de montage de manière centrée par rapport au servomoteur et
serrer les vis.(Les vis ne font pas partie de l’étendue de livraison mais de la console de montage du servomoteur!)
7. Après avoir effectué la mise en service selon le chapitre 7: amener le servomoteur en position de fin decourse et coller l’échelle (4.1) selon le sens de rotation ou la plage de rotation sur la roue d’accouplement(2). L’échelle est autocollante!
4 Modules optionnels (voir fig. 3 en annexe)
Dévisser le couvercle du boîtier. Dévisser le couvercle de la carte (1). Module HART (uniquement appareils sans PROFIBUS PA): enficher le module HART (2) sur les
connecteurs après avoir retiré le cavalier (7) de la rangée supérieure. Module Jy: insérer le module Jy (3) dans le logement inférieur, réaliser le raccordement électrique avec le
câble plat fourni (6). Module d’alarme: insérer le module d’alarme (4) dans le logement supérieur, réaliser le raccordement
électrique avec le câble plat fourni (5).

C79000-M7450-C156-01
0% 20 40 60 80 100%
1) 2)
3)
4)5)
182
9
4.2
3
16
17
24.1
2
3
9
1415
Fig. 2 Montage (servomoteur à fraction de tour)
C79000-M7450-C156-01
5 Raccordement électrique
Appareils sans PROFIBUS PA
(voir fig. 5, 6 et 10 à 15 en annexe)Raccordement électrique: bornes à vis 1,5Passage de câble: PG 13Plage de signalConsigne w: 4 à 20 mA pour montage 2 fils (voir fig. 5 en annexe)
tension de charge nécessaire 10 V sans module HART, 11 V avec module HART
0/4 à 20 mA pour montage 3 ou 4 fils (voir fig. 6 en annexe) tension de charge 0,8 V sans module HART, 1,8 V avec module HART énergie auxiliaire UH: +18 V à +35 V (+30 V pour Ex)
Nota
Avant l’exploitation en raccordement à 3/4 fils, le cavalier entre les bornes 1 et 2 doit êtreimpérativement retiré.
Appareils avec PROFIBUS PA
(voir fig. 7 à 9 en annexe)Raccordement électrique: bornes à vis1,5Passage de câble: PG 13Alimentation en énergie auxiliaire: par busTension de bus: 9 à 24 V en mode à sécurité intrinsèque
9 à 32 V en mode non à sécurité intrinsèque Polarité: quelconqueConsommation en courant: 12 mA ± 10%Limitation de courant électron.: Imax ≤ 16 mA en cas d’erreur
Montage du câble–bus
1. Isolez le câble–bus selon la fig. 7 en annexe.2. Ouvrez le boîtier du positionneur en dévissant les 4 vis du couvercle.3. Passez le câble–bus prééquipé dans le raccord PG.4. Fixez le blindage au boîtier à l’aide du collier et des deux vis.5. Vissez le raccord PG.6. Raccordez les brins rouge et vert selon la fig. 8 aux bornes 3 et 7 de la platine de base (la polarité
n’a pas d’importance).
6 Raccordement pneumatique (voir fig. 16 en annexe)
!Avertissement
Pour des raisons de sécurité, ne raccorder l’énergie auxiliaire pneumatique après le montage, que,un signal électrique étant appliqué, si le positionneur est mis en mode de commande P – fonction-nement manuel (état de livraison, voir dépliant ”Brèves instructions d’utilisation”).
Nota
Veiller à la qualité de l’air! Air industriel sans brouillards d’huile, teneur en solide < 30 m, point decondensation 20 K sous la température ambiante la plus basse.

C79000-M7450-C156-01
Le cas échéant, raccorder les manomètres pour l’alimentation en air et la pression de réglage. Raccordement par taraudages G 1/4 DIN 45141:
PZ alimentation en air 1,4 à 7 barY1 pression de réglage 1 pour servomoteurs à simple et double effetY2 pression de réglage 2 pour servomoteurs à double effetE évacuation d’air (le cas échéant retirer l’amortisseur de bruit)
Position de sécurité en cas de perte de l’énergie électrique auxiliaire:simple effet: Y1 purgédouble effet: Y1 pression de réglage maximale (alimentation en air)
Y2 purgé
Réaliser le branchement des pressions de réglage Y1 et Y2 (uniquement dans le cas de servomoteurs àdouble effet) en fonction de la position de sécurité souhaitée.
Raccorder l’air d’alimentation à PZ.
7 Mise en service (voir Dépliant ”Brèves instructions d’utilisation”)
Du fait de la diversité de ses applications possibles, il est nécessaire d’adapter individuellement le positionneurau servomoteur (initialisation), une fois le montage effectué. Cette initialisation est largement automatique. Lepositionneur détermine successivement, entre autres, le sens d’action, la course ou l’angle de rotation, ainsi queles temps de positionnement du servomoteur.
Il suffit de régler très peu de paramètres sur le positionneur avant l’initialisation. Les paramètres restants sontpréréglés de telle manière qu’ils ne nécessitent normalement aucune modification. Si vous respectez les pointsci–après, la mise en service se déroulera sans aucun problème.
Astuce: vous retournez au paramètre précédent en appuyant simultanément sur les touches et .
7.1 Préparatifs pour les servomoteurs linéaires
1. Montez le positionneur à l’aide du jeu de pièces de montage correspondant (voir chapitre 3.2).
Nota
Le réglage du commutateur de transmission (7, dépliant ”Brèves instructions d’utilisation”) sur leservomoteur est particulièrement important:
Course Levier Réglage du commutateur de transmission
5 à 20 mm court 33° (c.à.d. en bas)
25 à 35 mm court 90° (c.à.d. en haut)
40 à 130 mm long 90° (c.à.d. en haut)
2. Poussez la broche d’entraînement (4, fig. 1, 2) sur le levier (6, fig. 1, 2) à la position d’échelle correspondantà la course nominale, ou à la position d’échelle supérieure la plus proche. Vissez la broche d’entraînementà l’aide de l’écrou (18, fig. 1, 2).
3. Effectuez les branchements pneumatiques entre le servomoteur et le positionneur et alimentez lepositionneur en énergie auxiliaire pneumatique (voir fig. 16).
4. Raccordez une source de courant ou de tension adéquate (voir fig. 5 ou fig. 6 et fig. 9 dans le cas dePROFIBUS PA).
5. Le positionneur se trouve à présent en mode de fonctionnement ”P–fonctionnement manuel”. La lignesupérieure de l’afficheur indique la tension courante du potentiomètre (P) en pourcent, par ex.: ”P12.3”, etla ligne inférieure affiche ”NOINIT” en clignotant :
6. Contrôlez le libre déplacement mécanique dans toute la plage de positionnement, en manoeuvrant le servo-moteur à l’aide des touches et pour l’amener à la position de fin de course correspondante.Astuce: vous pouvez manoeuvrer le servomoteur rapidement en maintenant enfoncée la touche du sensde course activée la première et en appuyant en outre sur l’autre touche directionnelle.

C79000-M7450-C156-01
7. Ce faisant, l’affichage de la tension de potentiomètre en % (ligne supérieure de l’afficheur) doit toujours resterdans la plage de P5.0 à P95.0. Dans le cas contraire, modifiez le réglage de l’accouplement à friction (8,fig. 3) comme suit: manoeuvrez le servomoteur en position de fin de course en appuyant sur la touche .Modifiez le réglage de l’accouplement à friction jusqu’à ce que la ligne supérieure de l’afficheur indique unevaleur comprise entre P90.0 et P95.0.
8. Balayez une nouvelle fois l’ensemble de la plage de positionnement en manoeuvrant le servomoteur à l’aidedes touches et pour l’amener en positions de fin de course. A présent, la tension de potentiomètredevrait se maintenir entre les valeurs P5.0 et P95.0. Si ce n’est toujours pas le cas, modifiez le réglage del’accouplement à friction (8, fig. 3) comme suit: manoeuvrez le servomoteur en position de fin de course enappuyant sur la touche . Cette fois, modifiez le réglage de l’accouplement à friction jusqu’à ce que la lignesupérieure de l’afficheur indique une valeur comprise entre P5.0 et P10.0.
9. Positionnez maintenant le servomoteur en position horizontale du levier. L’afficheur doit indiquer une valeurentre P48.0 et P52.0. Dans le cas contraire, modifiez le réglage de l’accouplement à friction (8, fig. 3) jusqu’àce que l’afficheur indique ”P50.0” en position horizontale du levier. Le positionneur pourra déterminer lacourse de manière d’autant plus précise que vous parviendrez à cibler exactement cette valeur.
7.1.1 Initialisation des servomoteurs linéairesLorsque vous êtes parvenus à manoeuvrer correctement le servomoteur, laissez–le en position médiane etdémarrez l’initialisation automatique :
1. Appuyez sur la touche de mode de fonctionnement pendant plus de 5 s. Vous passez en mode de configu-ration. Affichage:
2. Commutez sur le deuxième paramètre en appuyant brièvement sur la touche . Affichage: ou
Nota
Cette valeur doit impérativement correspondre au réglage du commutateur de transmission par en-grenage (7, dépliant ”Brèves instructions d’utilisation”) (33° ou 90°)
3. A l’aide de la touche de mode de fonctionnement , passez à l’affichage suivant : Affichage:
Il n’est nécessaire de régler ce paramètre qu’au cas où vous désirez, à la fin de la phase d’initialisation,obtenir l’affichage en mm de la valeur totale de la course calculée. Pour cela, choisissez sur l’afficheur unevaleur égale à celle du réglage de la broche d’entraînement, sur l’échelle du levier.
4. A l’aide de la touche de mode de fonctionnement , passez à l’affichage suivant : Affichage:
5. Démarrez l’initialisation en appuyant sur la touche pendant plus de 5 s. Affichage:
Pendant l’initialisation, la ligne inférieure de l’afficheur indique successivement ”RUN1” jusqu’à ”RUN5”.
Nota
Selon le servomoteur, l’initialisation peut durer jusqu’à 15 minutes.
Lorsque l’affichage suivant apparaît, l’initialisation est terminée :
En appuyant brièvement sur la touche , vous obtenez l’affichage suivant :

C79000-M7450-C156-01
Pour quitter le mode de configuration , appuyez sur la touche de mode de fonctionnement pendant plus de5 s. Après environ 5 s, la version logicielle est visualisée. Lorsque vous relâchez la touche de mode de fonctionne-ment, l’appareil est en mode manuel.
Si vous désirez réglez d’autres paramètres, reportez–vous au dépliant “Brèves instructions d’utilisation” ou aumanuel.
Vous pouvez également démarrer une autre initialisation à tout moment, à partir du mode manuel ou automatique.
7.2 Préparatifs pour les servomoteurs à fraction de tour
Nota
Très important: mettez le commutateur de transmission sur le positionneur (7, dépliant ”Brèvesinstructions d’utilisation”) sur 90° (angle de positionnement usuel pour les servomoteurs à fractionde tour).
1. Montez le positionneur à l’aide du jeu de pièces de montage correspondant (voir chapitre 3.3).2. Effectuez les branchements pneumatiques entre le servomoteur et le positionneur et alimentez le
positionneur en énergie auxiliaire pneumatique (voir fig. 16).3. Raccordez une source de courant ou de tension adéquate (voir fig. 5 ou fig. 6 et fig. 9 dans le cas de
PROFIBUS PA).4. Le positionneur se trouve à présent en mode de fonctionnement ”P–fonctionnement manuel”. La ligne
supérieure de l’afficheur indique la tension courante du potentiomètre (P) en %, par ex.: ”P12.3”, et la ligneinférieure affiche ”NOINIT” en clignotant :
5. Contrôlez le libre déplacement mécanique dans toute la plage de positionnement, en manoeuvrant le servo-moteur à l’aide des touches et pour l’amener à la position de fin de course correspondante.Astuce: vous pouvez manoeuvrer le servomoteur rapidement en maintenant enfoncée la touche du sensde course activée la première et en appuyant en outre sur l’autre touche directionnelle.
6. Ce faisant, l’affichage de la tension de potentiomètre en % (ligne supérieure de l’afficheur) doit toujours resterdans la plage de P5.0 à P95.0. Dans le cas contraire, modifiez le réglage de l’accouplement à friction (8,fig. 3) comme suit: manoeuvrez le servomoteur en position de fin de course en appuyant sur la touche .Modifiez le réglage de l’accouplement à friction jusqu’à ce que la ligne supérieure de l’afficheur indique unevaleur comprise entre P90.0 et P95.0.
7. Balayez une nouvelle fois l’ensemble de la plage de positionnement en manoeuvrant le servomoteur à l’aidedes touches et pour l’amener en positions de fin de course. A présent, la tension de potentiomètredevrait se maintenir entre les valeurs P5.0 et P95.0. Si ce n’est toujours pas le cas, modifiez le réglage del’accouplement à friction (8, fig. 3) comme suit: manoeuvrez le servomoteur en position de fin de course enappuyant sur la touche . Cette fois, modifiez le réglage de l’accouplement à friction jusqu’à ce que la lignesupérieure de l’afficheur indique une valeur comprise entre P5.0 et P10.0.
7.2.1 Initialisation des servomoteurs à fraction de tour
Lorsque vous êtres parvenu à parcourir correctement le domaine de positionnement du servomoteur, laissez–leen position médiane et démarrez l’initialisation automatique :
1. Appuyez sur la touche de mode de fonctionnement pendant plus de 5 s. Vous passez en mode deconfiguration.Affichage:
2. Réglez le paramètre sur “turn” à l’aide de la touche Affichage:
3. Commutez sur le deuxième paramètre en appuyant brièvement sur la touche .Ce paramètre est réglé automatiquement sur 90°.Affichage:
C79000-M7450-C156-01
4. A l’aide de la touche de mode de fonctionnement , passez à l’affichage suivant : Affichage:
5. Démarrez l’initialisation en appuyant sur la touche pendant plus de 5 s. Affichage:
Pendant l’initialisation, la ligne inférieure de l’afficheur indique successivement ”RUN1” jusqu’à ”RUN5”.
Nota
Selon le servomoteur, l’initialisation peut durer jusqu’à 15 minutes.
Lorsque l’affichage suivant apparaît, l’initialisation est terminée :
La valeur supérieure indique l’angle de rotation total du servomoteur (par exemple 93,5°).
En appuyant brièvement sur la touche , vous obtenez l’affichage suivant :
Pour quitter le mode de configuration , appuyez sur la touche de mode de fonctionnement pendant plus de5 s. Après environ 5 s, la version logicielle est visualisée. Lorsque vous relâchez la touche de mode de fonctionne-ment, l’appareil est en mode manuel.
Si vous désirez réglez d’autres paramètres, reportez–vous au dépliant “Brèves instructions d’utilisation” ou aumanuel.
Vous pouvez également démarrer une autre initialisation à tout moment, à partir du mode manuel ou automatique.
8 Conformité
Le positionneur SIPART PS2 sans PROFIBUS PA et les options associées est homologué de manière standardpour l’exploitation en zone 1, en tant que EEx ib (cf. attestation d’examen CE de type PTB 97 ATEX 2155), aussibien qu’en zone 2, en tant que Ex n (cf. attestation de conformité TÜV 97 ATEX 1212).
Pour une utilisation en zone 2, les conditions préalables suivantes doivent cependant être remplies:
Des plaques signalétiques spéciales doivent être utilisées pour le positionneur et les options mises enoeuvre.
Ces plaques signalétiques sont à commander sous forme de jeu complet (comprenant 5 pièces) avec lenuméros de commande C73451–A430–D55.
L’utilisation en zone 2 doit être mise en évidence en recouvrant (annulant) la plaque signalétique standardEEx ib par la plaque signalétique Ex n correspondante.
!Avertissement
Etant donné qu’en cas d’erreur durant l’exploitation du positionneur et de ses options en zone 2 lesvaleurs maximales du fonctionnement nominal risquent d’être dépassées, toute exploitationultérieure de appareil et de ses options en zone 1 est définitivement proscrite.
La certification FMRC (Factory Mutual Research Corporation) est également disponible sous le numéro6D6A0.AX.
C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
rau
nsc
hw
eig
un
d B
erlin
(1)
Att
esta
tio
n d
’exa
men
CE
de
typ
e
(Tra
duct
ion)
(2)
App
arei
ls e
t sys
tèm
es d
e pr
otec
tion
dest
inés
à ê
tre
utili
sés
en a
tmos
phèr
e ex
plos
ible
- D
irec
tive
94/
9/C
E
(3)
Num
éro
de l’
atte
stat
ion
CE
de
type
PT
B 9
7 A
TE
X 2
155
(4)
App
arei
l:P
ositi
onne
ur S
IPA
RT
PS
Typ
e 6D
R40
0*-*
E a
vec
optio
ns
(5)
Dem
ande
ur:
Sie
men
s A
G, A
utom
atis
ieru
ngst
echn
ik
(6)
Adr
esse
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
(7)
Cet
app
arei
l et s
es v
aria
ntes
éve
ntue
lles
acce
ptée
s es
t déc
rit d
ans
l’ann
exe
de la
pré
sent
e at
test
atio
n et
dan
s le
sdo
cum
ents
des
crip
tifs
cité
s en
ann
exe.
(8)
Le P
hysi
kalis
ch-T
echn
isch
e B
unde
sans
talt,
org
anis
me
notif
ié s
ous
la r
éfér
ence
010
2 co
nfor
mém
ent à
l’ar
ticle
9 d
ela
dire
ctiv
e 94
/9/C
E d
u P
arle
men
t Eur
opée
n et
du
Con
seil
du 2
3 m
ars
1994
, cer
tifie
que
cet
app
arei
l ou
syst
ème
depr
otec
tion
est c
onfo
rme
aux
exig
ence
s es
sent
ielle
s en
ce
qui c
once
rne
la s
écur
ité e
t la
sant
é po
ur la
con
cept
ion
etla
con
stru
ctio
n d’
appa
reils
et d
e sy
stèm
es d
e pr
otec
tion
dest
inés
à ê
tre
utili
sés
en a
tmos
phèr
e ex
plos
ible
, don
nées
dans
l’an
nexe
II d
e la
dire
ctiv
e.
Les
vérif
icat
ions
et é
preu
ves
figur
ent d
ans
notr
e ra
ppor
t con
fiden
tiel N
º P
TB
Ex
97-2
7196
.
(9)
Le r
espe
ct d
es e
xige
nces
ess
entie
lles
en c
e qu
i con
cern
e la
séc
urité
et
la s
anté
est
ass
uré
par
la c
onfo
rmité
aux
docu
men
ts s
uiva
nts:
DIN
EN
500
14:1
994-
03D
IN E
N 5
0020
:199
6-04
(10)
Le s
igne
”X” l
orsq
u’il
est p
lacé
à la
sui
te d
u nu
mér
o de
l’at
test
atio
n, in
diqu
e qu
e ce
mat
érie
l est
sou
mis
aux
con
ditio
nssp
écia
les
pour
une
util
isat
ion
sûre
, men
tionn
ées
dans
l’an
nexe
de
la p
rése
nte
atte
stat
ion.
(11)
Cet
te a
ttest
atio
n d’
exam
en C
E d
e ty
pe c
once
rne
uniq
uem
ent l
a co
ncep
tion
et la
con
stru
ctio
n de
l’ap
pare
il sp
écifi
é,co
nfor
mém
ent à
la
dire
ctiv
e 94
/9/C
E.
Des
exi
genc
es s
uppl
émen
taire
s de
cet
te d
irect
ive
sont
app
licab
les
pour
lafa
bric
atio
n et
la fo
urni
ture
de
l’app
arei
l.
(12)
Le m
arqu
age
de l’
appa
reil
devr
a co
mpo
rter
, ent
re a
utre
s in
dica
tions
util
es, l
es m
entio
ns s
uiva
ntes
:
II 2
G
EE
x ib
IIC
T6
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
19.
08.1
997
Par
ord
re
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
page
1/4
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
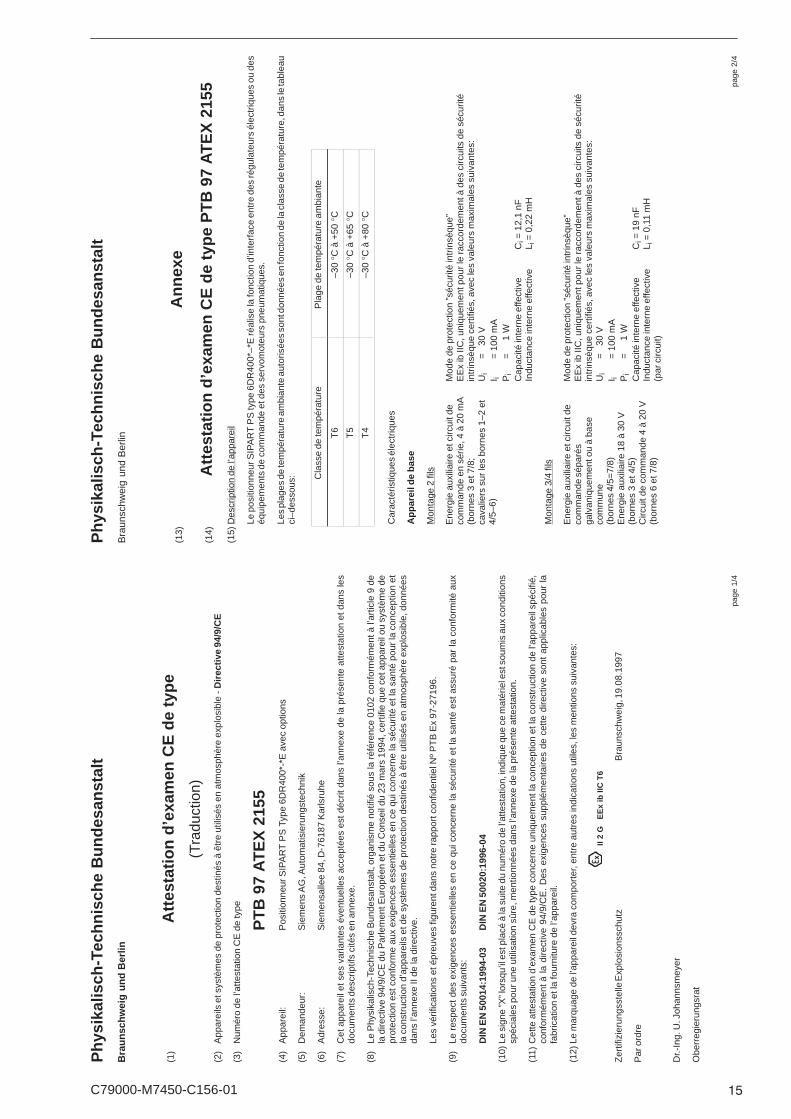
(13)
An
nex
e
(14)
Att
esta
tio
n d
’exa
men
CE
de
typ
e P
TB
97
AT
EX
215
5(1
5)D
escr
iptio
n de
l’ap
pare
il
Le p
ositi
onne
ur S
IPA
RT
PS
type
6D
R40
0*–*
E ré
alis
e la
fonc
tion
d’in
terf
ace
entr
e de
s ré
gula
teur
s él
ectr
ique
s ou
des
équi
pem
ents
de
com
man
de e
t des
ser
vom
oteu
rs p
neum
atiq
ues.
Les
plag
es d
e te
mpé
ratu
re a
mbi
ante
aut
oris
ées
sont
don
nées
en
fonc
tion
de la
cla
sse
de te
mpé
ratu
re, d
ans
le ta
blea
uci
–des
sous
: Cla
sse
de te
mpé
ratu
reP
lage
de
tem
péra
ture
am
bian
te
T6
–30
°C à
+50
°C
T5
–30
°C à
+65
°C
T4
–30
°C à
+80
°C
Car
acté
ristiq
ues
élec
triq
ues
Ap
par
eil d
e b
ase
Mon
tage
2 fi
ls
Ene
rgie
aux
iliai
re e
t circ
uit d
eco
mm
ande
en
série
, 4 à
20
mA
(bor
nes
3 et
7/8
;ca
valie
rs s
ur le
s bo
rnes
1–2
et
4/5–
6)
Mod
e de
pro
tect
ion
”séc
urité
intr
insè
que”
E
Ex
ib II
C, u
niqu
emen
t pou
r le
rac
cord
emen
t à d
es c
ircui
ts d
e sé
curit
éin
trin
sèqu
e ce
rtifi
és, a
vec
les
vale
urs
max
imal
es s
uiva
ntes
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
ité in
tern
e ef
fect
ive
Ci =
12,
1 nF
Indu
ctan
ce in
tern
e ef
fect
ive
L i =
0,2
2 m
H
Mon
tage
3/4
fils
Ene
rgie
aux
iliai
re e
t circ
uit d
eco
mm
ande
sép
arés
galv
aniq
uem
ent o
u à
base
com
mun
e(b
orne
s 4/
5=7/
8)E
nerg
ie a
uxili
aire
18
à 30
V(b
orne
s 3
et 4
/5)
Circ
uit d
e co
mm
ande
4 à
20
V(b
orne
s 6
et 7
/8)
Mod
e de
pro
tect
ion
”séc
urité
intr
insè
que”
EE
x ib
IIC
, uni
quem
ent p
our
le r
acco
rdem
ent à
des
circ
uits
de
sécu
rité
intr
insè
que
cert
ifiés
, ave
c le
s va
leur
s m
axim
ales
sui
vant
es:
Ui
=
30 V
I i=
100
mA
Pi
=
1 W
Cap
acité
inte
rne
effe
ctiv
eC
i = 1
9 nF
Indu
ctan
ce in
tern
e ef
fect
ive
L i =
0,1
1 m
H(p
ar c
ircui
t)
page
2/4
C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
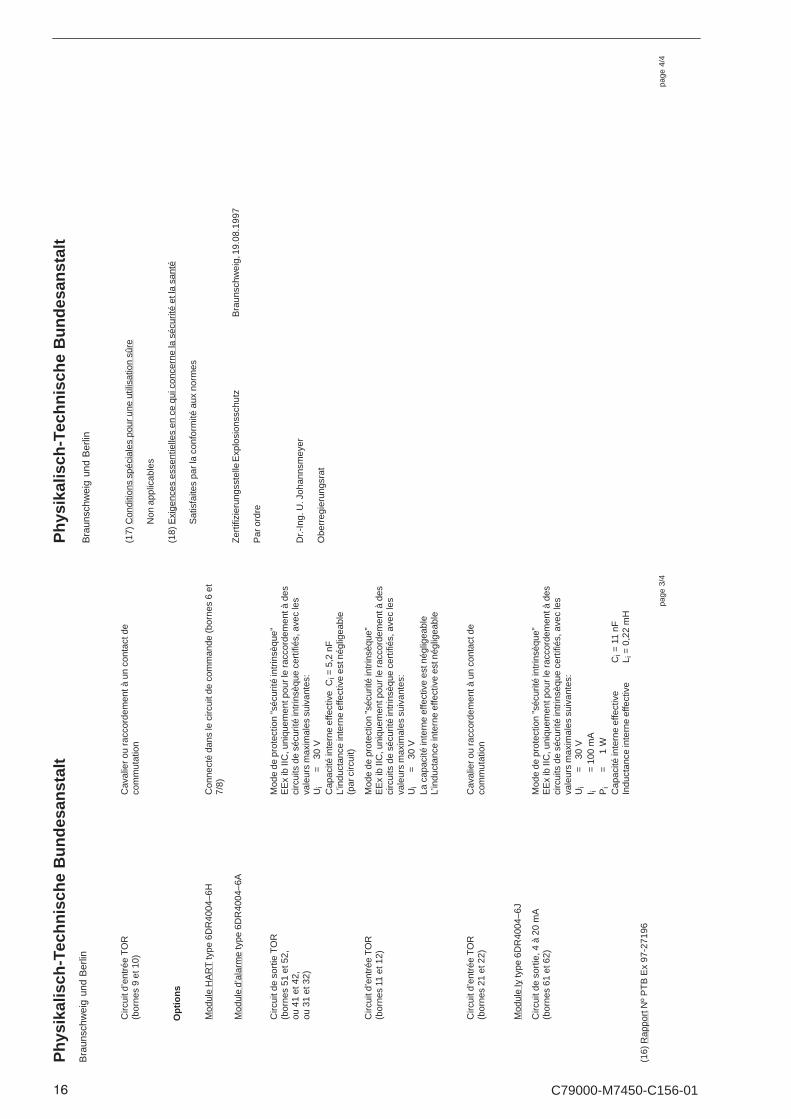
Circ
uit d
’ent
rée
TO
R(b
orne
s 9
et 1
0)C
aval
ier o
u ra
ccor
dem
ent à
un
cont
act d
eco
mm
utat
ion
Op
tio
ns
Mod
ule
HA
RT
type
6D
R40
04–6
HC
onne
cté
dans
le c
ircui
t de
com
man
de (b
orne
s 6
et7/
8)
Mod
ule
d’al
arm
e ty
pe 6
DR
4004
–6A
Circ
uit d
e so
rtie
TO
R(b
orne
s 51
et 5
2,ou
41
et 4
2,ou
31
et 3
2)
Mod
e de
pro
tect
ion
”séc
urité
intr
insè
que”
EE
x ib
IIC
, uni
quem
ent p
our
le r
acco
rdem
ent à
des
circ
uits
de
sécu
rité
intr
insè
que
cert
ifiés
, ave
c le
sva
leur
s m
axim
ales
sui
vant
es:
Ui
=
30 V
Cap
acité
inte
rne
effe
ctiv
e C
i = 5
,2 n
FL’
indu
ctan
ce in
tern
e ef
fect
ive
est n
églig
eabl
e(p
ar c
ircui
t)
Circ
uit d
’ent
rée
TO
R(b
orne
s 11
et 1
2)M
ode
de p
rote
ctio
n ”s
écur
ité in
trin
sèqu
e”
EE
x ib
IIC
, uni
quem
ent p
our
le r
acco
rdem
ent à
des
circ
uits
de
sécu
rité
intr
insè
que
cert
ifiés
, ave
c le
sva
leur
s m
axim
ales
sui
vant
es:
Ui
=
30 V
La c
apac
ité in
tern
e ef
fect
ive
est n
églig
eabl
eL’
indu
ctan
ce in
tern
e ef
fect
ive
est n
églig
eabl
e
Circ
uit d
’ent
rée
TO
R(b
orne
s 21
et 2
2)C
aval
ier o
u ra
ccor
dem
ent à
un
cont
act d
eco
mm
utat
ion
Mod
ule
Iy ty
pe 6
DR
4004
–6J
Circ
uit d
e so
rtie
, 4 à
20
mA
(bor
nes
61 e
t 62)
Mod
e de
pro
tect
ion
”séc
urité
intr
insè
que”
E
Ex
ib II
C, u
niqu
emen
t pou
r le
rac
cord
emen
t à d
esci
rcui
ts d
e sé
curit
é in
trin
sèqu
e ce
rtifi
és, a
vec
les
vale
urs
max
imal
es s
uiva
ntes
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
ité in
tern
e ef
fect
ive
Ci =
11
nFIn
duct
ance
inte
rne
effe
ctiv
eL i
= 0
,22
mH
(16)
Rap
port
Nº
PT
B E
x 97
-271
96
page
3/4
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
t
Bra
unsc
hwei
g u
nd B
erlin
(17)
Con
ditio
ns s
péci
ales
pou
r une
util
isat
ion
sûre
Non
app
licab
les
(18)
Exi
genc
es e
ssen
tielle
s en
ce
qui c
once
rne
la s
écur
ité e
t la
sant
é
Sat
isfa
ites
par l
a co
nfor
mité
aux
nor
mes
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
19.
08.1
997
Par
ord
re
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
page
4/4
C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
1. E
xten
sio
n
selo
n la
dir
ecti
ve 9
4/9/
CE
an
nex
e III
nu
mér
o 6
r
elat
ive
à l’a
ttes
tati
on
d’e
xam
en C
E d
e ty
pe
PT
B 9
7 A
TE
X 2
155
App
arei
l:P
ositi
onne
ur S
IPA
RT
PS
Typ
e 6D
R40
0*-*
E a
vec
optio
ns
Dem
ande
ur:
Sie
men
s A
G
autr
efoi
s:S
iem
ens
AG
, Aut
omat
isie
rung
stec
hnik
Adr
esse
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
Des
crip
tions
des
ext
ensi
ons
et m
odifi
catio
ns
Le p
ositi
onne
ur S
IPA
RT
PS
typ
e 6D
R40
0*–*
E a
vec
optio
ns e
st d
ésor
mai
s au
toris
é à
être
pro
duit
selo
n le
s do
cum
ents
d’es
sais
cité
s da
ns le
rapp
ort d
’ess
ais.
Les
mod
ifica
tions
con
cern
ent l
a co
nstit
utio
n in
tern
e de
l’ap
pare
il et
la d
ésig
natio
ndu
pro
duit.
Cel
le–c
i est
dés
orm
ais
libel
lée:
pos
ition
neur
SIP
AR
T P
S2
type
6D
R40
0*–*
E a
vec
optio
ns. L
es c
arac
téris
tique
sél
ectr
ique
s et
les
autr
es d
onné
es re
sten
t inc
hang
ées.
Rap
port
Nº
PT
B E
x 97
-273
51
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
05.
01.1
998
Par
ord
re
Dr.-
Ing.
U. J
ohan
nsm
eyer
Reg
ieru
ngsd
irekt
or
page
1/1
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
rau
nsc
hw
eig
un
d B
erlin
2. E
xten
sio
n
selo
n la
dir
ecti
ve 9
4/9/
CE
an
nex
e III
nu
mér
o 6
r
elat
ive
à l’a
ttes
tati
on
d’e
xam
en C
E d
e ty
pe
PT
B 9
7 A
TE
X 2
155
App
arei
l:P
ositi
onne
ur S
IPA
RT
PS
Typ
e 6D
R40
0*-*
E
Mar
quag
e: II
2 G
EE
x ib
IIC
T6
or
EE
x ia
IIC
T6
Dem
ande
ur:
Sie
men
s A
G, A
utom
atis
ieru
ngst
echn
ik
Adr
esse
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
Des
crip
tions
des
ext
ensi
ons
et m
odifi
catio
ns
Le p
ositi
onne
ur S
IPA
RT
PS
type
6D
R40
0*–*
E e
st é
tend
u au
type
6D
R41
0*–*
E e
t est
dés
orm
ais
auto
risé
à êt
re p
rodu
itse
lon
les
docu
men
ts d
’ess
ais
cité
s da
ns le
rap
port
d’e
ssai
s.
Les
mod
ifica
tions
con
cern
ent l
a co
nstit
utio
n in
tern
e de
l’ap
pare
il, le
s ”c
arac
téris
tique
s él
ectr
ique
s” a
insi
que
le m
ode
depr
otec
tion
cont
re l’
expl
osio
n. L
e m
ode
de p
rote
ctio
n po
ur l’
exéc
utio
n m
odifi
ée e
st II
2 G
EE
x ia
IIC
T6.
Car
acté
ristiq
ues
élec
triq
ues
Ap
par
eil d
e b
ase
Circ
uit
d’én
ergi
e au
xilia
ire/d
e so
rtie
PR
OF
IBU
S–P
A
(bor
nes
7 et
3)
Mod
e de
pro
tect
ion
”séc
urité
intr
insè
que”
EE
x ia
IIC
ou
EE
x ib
IIC
,
uniq
uem
ent p
our l
e ra
ccor
dem
ent à
un
circ
uit d
esé
curit
é in
trin
sèqu
e ce
rtifi
é (p
ar e
x. a
limen
tatio
n F
ISC
O)
avec
les
vale
urs
max
imal
es c
onfo
rmém
ent a
u ta
blea
uci
–apr
ès:
Alim
enta
tion
FIS
CO
EE
x ib
IIC
Alim
enta
tion
FIS
CO
EE
x ib
IIB
Alim
enta
tion
FIS
CO
EE
x ia
IIC
Bar
riere
EE
x ia
IIC
ou E
Ex
ib II
C
Car
acté
ristiq
uere
ctan
gula
irere
ctan
gula
iretr
apéz
oïda
lelin
éaire
Tens
ion
17,5
V17
,5 V
17,5
V24
V
Cou
rant
128
mA
280
mA
215
mA
200
mA
Pui
ssan
ce1,
8 W
4,2
W1,
8 W
1,2
W
L i =
8
H
Ci
nég
ligea
ble
page
1/3
C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
t
Bra
un
sch
wei
g u
nd
Ber
lin
2. E
xten
sio
n r
elat
ive
à l’a
ttes
tati
on
d’e
xam
en C
E d
e ty
pe
PT
97
AT
EX
215
5
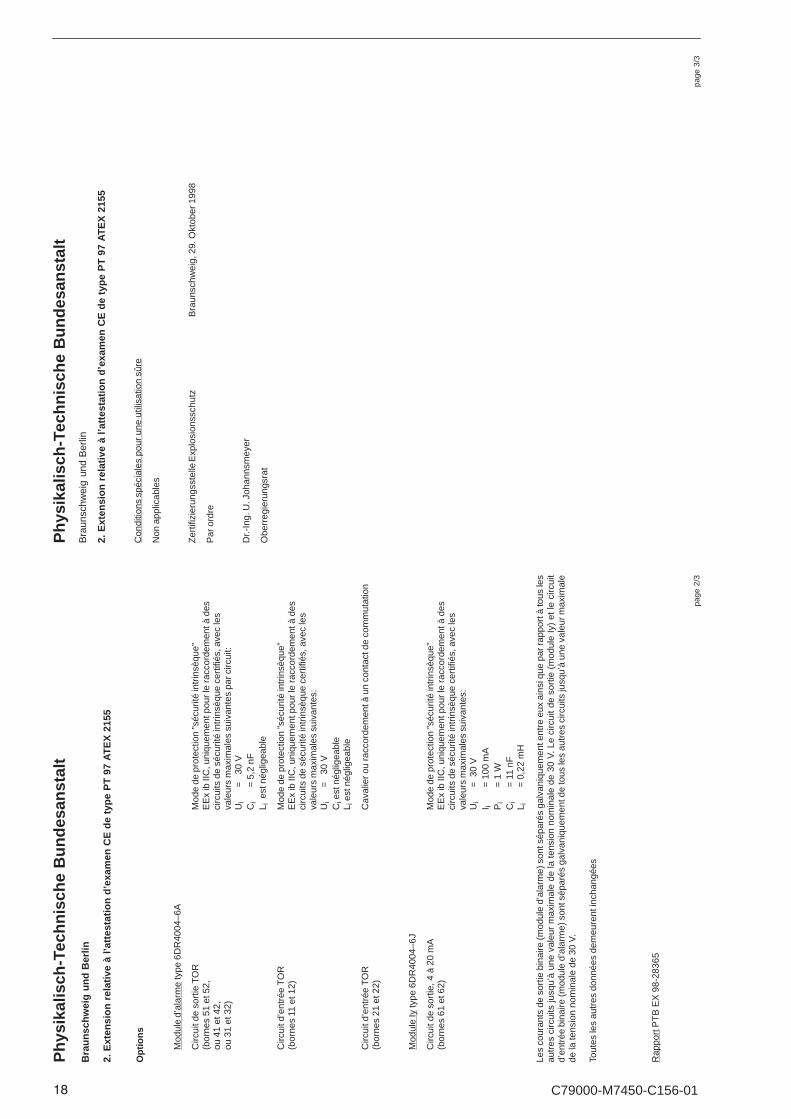
Op
tio
ns
Mod
ule
d’al
arm
e ty
pe 6
DR
4004
–6A
Circ
uit d
e so
rtie
TO
R(b
orne
s 51
et 5
2,ou
41
et 4
2,ou
31
et 3
2)
Mod
e de
pro
tect
ion
”séc
urité
intr
insè
que”
EE
x ib
IIC
, uni
quem
ent p
our
le r
acco
rdem
ent à
des
circ
uits
de
sécu
rité
intr
insè
que
cert
ifiés
, ave
c le
sva
leur
s m
axim
ales
sui
vant
es p
ar c
ircui
t:U
i=
30
VC
i =
5,2
nF
L i e
st n
églig
eabl
e
Circ
uit d
’ent
rée
TO
R(b
orne
s 11
et 1
2)M
ode
de p
rote
ctio
n ”s
écur
ité in
trin
sèqu
e”
EE
x ib
IIC
, uni
quem
ent p
our
le r
acco
rdem
ent à
des
circ
uits
de
sécu
rité
intr
insè
que
cert
ifiés
, ave
c le
sva
leur
s m
axim
ales
sui
vant
es:
Ui
=
30 V
Ci e
st n
églig
eabl
eL i
est
nég
ligea
ble
Circ
uit d
’ent
rée
TO
R(b
orne
s 21
et 2
2)C
aval
ier o
u ra
ccor
dem
ent à
un
cont
act d
e co
mm
utat
ion
Mod
ule
Iy ty
pe 6
DR
4004
–6J
Circ
uit d
e so
rtie
, 4 à
20
mA
(bor
nes
61 e
t 62)
Mod
e de
pro
tect
ion
”séc
urité
intr
insè
que”
E
Ex
ib II
C, u
niqu
emen
t pou
r le
rac
cord
emen
t à d
esci
rcui
ts d
e sé
curit
é in
trin
sèqu
e ce
rtifi
és, a
vec
les
vale
urs
max
imal
es s
uiva
ntes
:U
i=
30
VI i
= 1
00 m
AP
i=
1 W
Ci
= 1
1 nF
L i
= 0
,22
mH
Les
cour
ants
de
sort
ie b
inai
re (m
odul
e d’
alar
me)
son
t sép
arés
gal
vani
quem
ent e
ntre
eux
ain
si q
ue p
ar ra
ppor
t à to
us le
sau
tres
circ
uits
jusq
u’à
une
vale
ur m
axim
ale
de la
tens
ion
nom
inal
e de
30
V. L
e ci
rcui
t de
sort
ie (
mod
ule
Iy)
et le
circ
uit
d’en
trée
bin
aire
(mod
ule
d’al
arm
e) s
ont s
épar
és g
alva
niqu
emen
t de
tous
les
autr
es c
ircui
ts ju
squ’
à un
e va
leur
max
imal
ede
la te
nsio
n no
min
ale
de 3
0 V
.
Tout
es le
s au
tres
don
nées
dem
eure
nt in
chan
gées
Rap
port
PT
B E
X 9
8-28
365
page
2/3
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
2. E
xten
sio
n r
elat
ive
à l’a
ttes
tati
on
d’e
xam
en C
E d
e ty
pe
PT
97
AT
EX
215
5
Con
ditio
ns s
péci
ales
pou
r une
util
isat
ion
sûre
Non
app
licab
les
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
29.
Okt
ober
199
8
Par
ord
re
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
page
3/3
C79000-M7450-C156-01
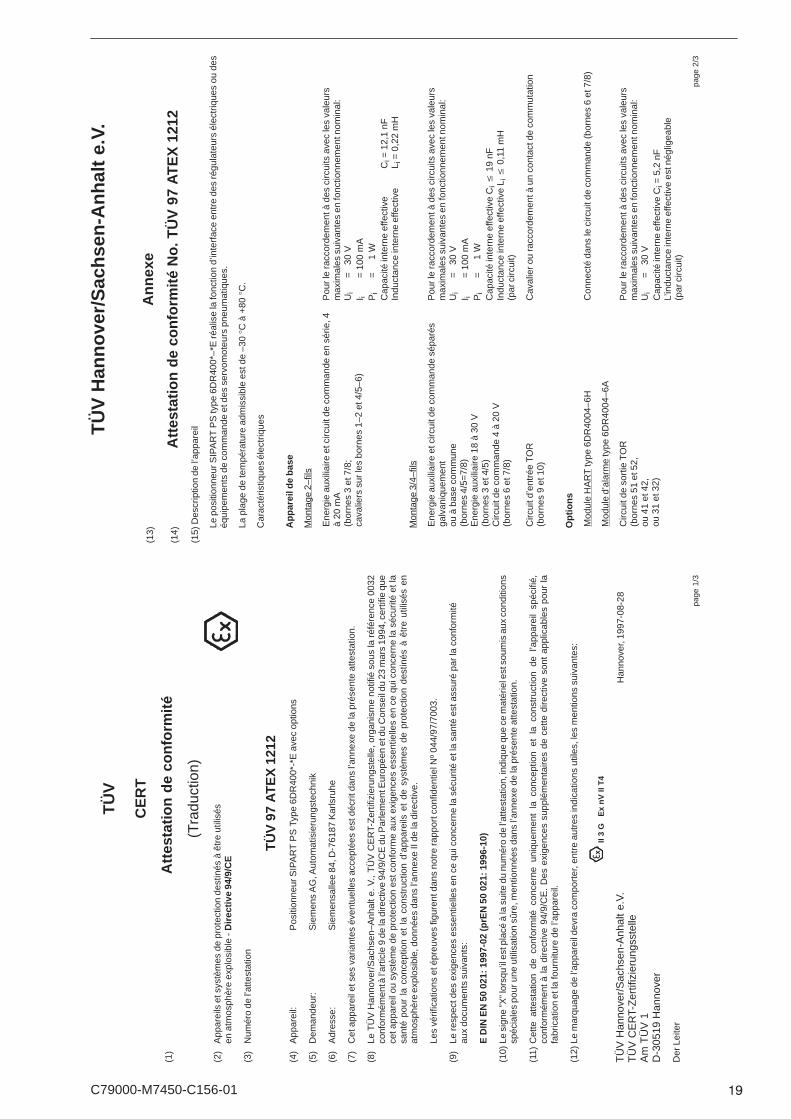
TÜ
V
CE
RT
(1)
Att
esta
tio
n d
e co
nfo
rmit
é
(Tra
duct
ion)
(2)
App
arei
ls e
t sys
tèm
es d
e pr
otec
tion
dest
inés
à ê
tre
utili
sés
en a
tmos
phèr
e ex
plos
ible
- D
irec
tive
94/
9/C
E
(3)
Num
éro
de l’
atte
stat
ion
TÜ
V 9
7 A
TE
X 1
212
(4)
App
arei
l:P
ositi
onne
ur S
IPA
RT
PS
Typ
e 6D
R40
0*-*
E a
vec
optio
ns
(5)
Dem
ande
ur:
Sie
men
s A
G, A
utom
atis
ieru
ngst
echn
ik
(6)
Adr
esse
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
(7)
Cet
app
arei
l et s
es v
aria
ntes
éve
ntue
lles
acce
ptée
s es
t déc
rit d
ans
l’ann
exe
de la
pré
sent
e at
test
atio
n.
(8)
Le T
ÜV
Han
nove
r/S
achs
en–A
nhal
t e. V
., T
ÜV
CE
RT-
Zer
tifiz
ieru
ngst
elle
, org
anis
me
notif
ié s
ous
la r
éfér
ence
003
2co
nfor
mém
ent à
l’ar
ticle
9 d
e la
dire
ctiv
e 94
/9/C
E d
u P
arle
men
t Eur
opée
n et
du
Con
seil
du 2
3 m
ars
1994
, cer
tifie
que
cet a
ppar
eil o
u sy
stèm
e de
pro
tect
ion
est c
onfo
rme
aux
exig
ence
s es
sent
ielle
s en
ce
qui c
once
rne
la s
écur
ité e
t la
sant
é po
ur l
a co
ncep
tion
et l
a co
nstr
uctio
n d’
appa
reils
et
de s
ystè
mes
de
prot
ectio
n de
stin
és à
êtr
e ut
ilisé
s en
atm
osph
ère
expl
osib
le, d
onné
es d
ans
l’ann
exe
II de
la d
irect
ive.
Les
vérif
icat
ions
et é
preu
ves
figur
ent d
ans
notr
e ra
ppor
t con
fiden
tiel N
º 04
4/97
/700
3.
(9)
Le r
espe
ct d
es e
xige
nces
ess
entie
lles
en c
e qu
i con
cern
e la
séc
urité
et l
a sa
nté
est a
ssur
é pa
r la
con
form
ité
aux
docu
men
ts s
uiva
nts:
E D
IN E
N 5
0 02
1: 1
997-
02 (p
rEN
50
021:
199
6-10
)
(10)
Le s
igne
”X” l
orsq
u’il
est p
lacé
à la
sui
te d
u nu
mér
o de
l’at
test
atio
n, in
diqu
e qu
e ce
mat
érie
l est
sou
mis
aux
con
ditio
nssp
écia
les
pour
une
util
isat
ion
sûre
, men
tionn
ées
dans
l’an
nexe
de
la p
rése
nte
atte
stat
ion.
(11)
Cet
te a
ttest
atio
n de
con
form
ité c
once
rne
uniq
uem
ent
la c
once
ptio
n et
la
cons
truc
tion
de l
’app
arei
l sp
écifi
é,co
nfor
mém
ent à
la
dire
ctiv
e 94
/9/C
E.
Des
exi
genc
es s
uppl
émen
taire
s de
cet
te d
irect
ive
sont
app
licab
les
pour
lafa
bric
atio
n et
la fo
urni
ture
de
l’app
arei
l.
(12)
Le m
arqu
age
de l’
appa
reil
devr
a co
mpo
rter
, ent
re a
utre
s in
dica
tions
util
es, l
es m
entio
ns s
uiva
ntes
:
II 3
G
Ex
nV
II T
4
TÜ
V H
anno
ver/
Sac
hsen
-Anh
alt
e.V.
Han
nove
r, 19
97-0
8-28
TÜ
V C
ER
T-Z
ertif
izie
rung
sste
lleA
m T
ÜV
1D
-305
19 H
anno
ver
Der
Lei
ter
page
1/3
TÜ
V H
ann
ove
r/S
ach
sen
-An
hal
t e.
V.
(13)
An
nex
e
(14)
Att
esta
tio
n d
e co
nfo
rmit
é N
o. T
ÜV
97
AT
EX
121
2(1
5)D
escr
iptio
n de
l’ap
pare
il
Le p
ositi
onne
ur S
IPA
RT
PS
type
6D
R40
0*–*
E ré
alis
e la
fonc
tion
d’in
terf
ace
entr
e de
s ré
gula
teur
s él
ectr
ique
s ou
des
équi
pem
ents
de
com
man
de e
t des
ser
vom
oteu
rs p
neum
atiq
ues.
La p
lage
de
tem
péra
ture
adm
issi
ble
est d
e –3
0 °C
à +
80 °
C.
Car
acté
ristiq
ues
élec
triq
ues
Ap
par
eil d
e b
ase
Mon
tage
2–f
ils
Ene
rgie
aux
iliai
re e
t circ
uit d
e co
mm
ande
en
série
, 4à
20 m
A(b
orne
s 3
et 7
/8;
cava
liers
sur
les
born
es 1
–2 e
t 4/5
–6)
Pou
r le
rac
cord
emen
t à d
es c
ircui
ts a
vec
les
vale
urs
max
imal
es s
uiva
ntes
en
fonc
tionn
emen
t nom
inal
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
ité in
tern
e ef
fect
ive
Ci =
12,
1 nF
Indu
ctan
ce in
tern
e ef
fect
ive
L i =
0,2
2 m
H
Mon
tage
3/4
–fils
Ene
rgie
aux
iliai
re e
t circ
uit d
e co
mm
ande
sép
arés
galv
aniq
uem
ent
ou à
bas
e co
mm
une
(bor
nes
4/5=
7/8)
Ene
rgie
aux
iliai
re 1
8 à
30 V
(bor
nes
3 et
4/5
)C
ircui
t de
com
man
de 4
à 2
0 V
(bor
nes
6 et
7/8
)
Pou
r le
rac
cord
emen
t à d
es c
ircui
ts a
vec
les
vale
urs
max
imal
es s
uiva
ntes
en
fonc
tionn
emen
t nom
inal
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
ité in
tern
e ef
fect
ive
Ci
19
nFIn
duct
ance
inte
rne
effe
ctiv
e L i
0
,11
mH
(par
circ
uit)
Circ
uit d
’ent
rée
TO
R(b
orne
s 9
et 1
0)C
aval
ier o
u ra
ccor
dem
ent à
un
cont
act d
e co
mm
utat
ion
Op
tio
ns
Mod
ule
HA
RT
type
6D
R40
04–6
HC
onne
cté
dans
le c
ircui
t de
com
man
de (b
orne
s 6
et 7
/8)
Mod
ule
d’al
arm
e ty
pe 6
DR
4004
–6A
Circ
uit d
e so
rtie
TO
R(b
orne
s 51
et 5
2,ou
41
et 4
2,ou
31
et 3
2)
Pou
r le
rac
cord
emen
t à d
es c
ircui
ts a
vec
les
vale
urs
max
imal
es s
uiva
ntes
en
fonc
tionn
emen
t nom
inal
:U
i=
30
VC
apac
ité in
tern
e ef
fect
ive
Ci =
5,2
nF
L’in
duct
ance
inte
rne
effe
ctiv
e es
t nég
ligea
ble
(par
circ
uit)
page
2/3
C79000-M7450-C156-01
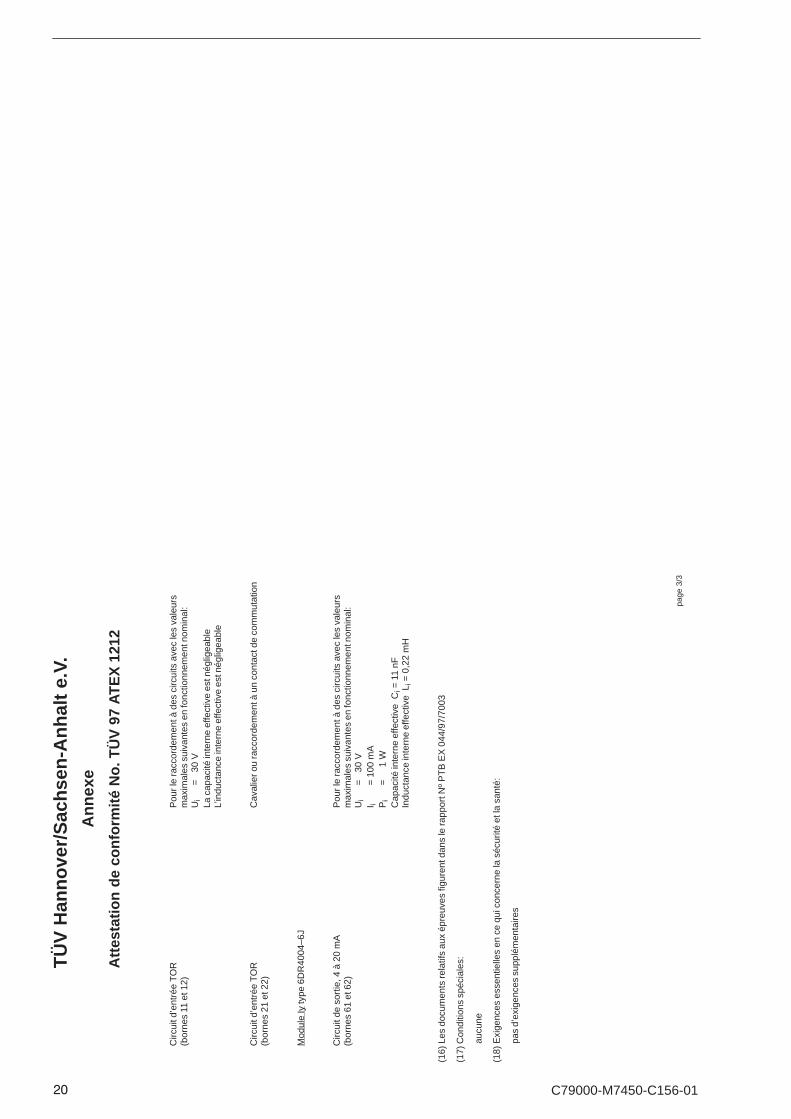
TÜ
V H
ann
ove
r/S
ach
sen
-An
hal
t e.
V.A
nn
exe
Att
esta
tio
n d
e co
nfo
rmit
é N
o. T
ÜV
97
AT
EX
121
2
Circ
uit d
’ent
rée
TO
R(b
orne
s 11
et 1
2)P
our
le r
acco
rdem
ent à
des
circ
uits
ave
c le
s va
leur
sm
axim
ales
sui
vant
es e
n fo
nctio
nnem
ent n
omin
al:
Ui
=
30 V
La c
apac
ité in
tern
e ef
fect
ive
est n
églig
eabl
eL’
indu
ctan
ce in
tern
e ef
fect
ive
est n
églig
eabl
e
Circ
uit d
’ent
rée
TO
R(b
orne
s 21
et 2
2)C
aval
ier o
u ra
ccor
dem
ent à
un
cont
act d
e co
mm
utat
ion
Mod
ule
Iy ty
pe 6
DR
4004
–6J
Circ
uit d
e so
rtie
, 4 à
20
mA
(bor
nes
61 e
t 62)
Pou
r le
rac
cord
emen
t à d
es c
ircui
ts a
vec
les
vale
urs
max
imal
es s
uiva
ntes
en
fonc
tionn
emen
t nom
inal
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
ité in
tern
e ef
fect
ive
Ci =
11
nFIn
duct
ance
inte
rne
effe
ctiv
e L
i = 0
,22
mH
(16)
Les
docu
men
ts re
latif
s au
x ép
reuv
es fi
gure
nt d
ans
le ra
ppor
t Nº
PT
B E
X 0
44/9
7/70
03
(17)
Con
ditio
ns s
péci
ales
:
aucu
ne
(18)
Exi
genc
es e
ssen
tielle
s en
ce
qui c
once
rne
la s
écur
ité e
t la
sant
é:
pas
d’ex
igen
ces
supp
lém
enta
ires
page
3/3
C79000-M7450-C156-01
Déc
lara
tio
n C
E d
e co
nfo
rmit
é
No
.PS
2–E
x1
(Tra
duct
ion)
Con
stru
cteu
r:S
iem
ens
Akt
ieng
esel
lsch
aft
Ber
eich
Aut
omat
isie
rung
stec
hnik
Ges
chäf
tsge
biet
Meß
-und
Prü
ftech
nik,
Pro
zeß
auto
mat
isie
rung
Adr
esse
:S
iem
ensa
llee
84D
-761
87 K
arls
ruhe
Bun
desr
epub
lik D
euts
chla
nd
Dés
igna
tion
du p
rodu
it:P
ositi
onne
ur e
l.–pn
eum
. SIP
AR
T P
S2
6DR
400*
-*E
ave
c m
odul
esm
odul
e H
AR
T6D
R40
04-6
Hm
odul
e d’
alar
me
6DR
4004
-6A
mod
ule
I y6D
R40
04-6
J
Le
pro
du
it d
ésig
né
est c
on
form
e au
x p
resc
rip
tio
ns
des
dir
ecti
ves
euro
pée
nn
es s
uiv
ante
s:
94/9
/CE
Dire
ctiv
e du
Par
lem
ent e
urop
éen
et d
u C
onse
il co
ncer
nant
le ra
ppro
chem
ent d
es lé
gisl
atio
ns d
es É
tats
mem
bres
pour
les
appa
reils
et s
ystè
mes
de
prot
ectio
n de
stin
és à
êtr
e ut
ilisé
s en
atm
osph
ère
expl
osib
le.
Des
info
rmat
ion
s co
mp
lém
enta
ires
co
nce
rnan
t le
resp
ect d
e ce
tte
dir
ecti
ve s
on
t co
nte
nu
es d
ans
l’an
nex
e E
x
App
ositi
on d
u m
arqu
age
CE
: 8/1
997
Sie
men
s A
ktie
nges
ells
chaf
t
Kar
lsru
he, l
e 9.
9.97
L’an
nexe
Ex
fait
part
ie in
tégr
ante
de
la p
rése
nte
décl
arat
ion.
La p
rése
nte
décl
arat
ion
cert
ifie
la c
onfo
rmité
aux
dire
ctiv
es é
num
érée
s, m
ais
ne c
onst
itue
pas
une
gara
ntie
de
qual
ités
au s
ens
de la
légi
slat
ion
sur
la r
espo
nsab
ilité
du
fait
de p
rodu
its d
éfec
tueu
xLe
s av
ertis
sem
ents
de
sécu
rité
figur
ant
dans
la d
ocum
enta
tion
du p
rodu
it do
iven
t êtr
e re
spec
tés.
An
nex
e E
xD
écla
rati
on
CE
de
con
form
ité
No
.PS
2–E
x1
Dés
igna
tion
du p
rodu
it:P
ositi
onne
ur e
l.–pn
eum
. SIP
AR
T P
S2
6DR
400*
-*E
ave
c m
odul
esm
odul
e H
AR
T6D
R40
04-6
Hm
odul
e d’
alar
me
6DR
4004
-6A
mod
ule
I y6D
R40
04-6
J
La c
onfo
rmité
du
prod
uit
dési
gné
aux
pres
crip
tions
de
la d
irect
ive
94/9
/CE
est
jus
tifié
e pa
r le
res
pect
des
Nor
mes
Eur
opée
nnes
har
mon
isée
s su
ivan
tes.
Nor
mes
Eur
opée
nnes
har
mon
isée
s:
Num
éro
de ré
fére
nce
Dat
e de
pub
licat
ion
Num
éro
de ré
fére
nce
Dat
e de
pub
licat
ion
DIN
EN
500
14D
IN E
N 5
0020
03/1
994
04/1
996
E D
IN E
N 5
0021
prE
N 5
0021
02/1
997
10/1
996
Atte
stat
ion
d’ex
amen
CE
de
type
No.
:R
appo
rt N
o.:
PT
B 9
7 A
TE
X 2
155
(E
xib)
PT
B E
x 97
-271
96
Atte
stat
ion
de c
onfo
rmité
No.
:R
appo
rt N
o.:
TÜ
V 9
7 A
TE
X 1
212
(E
xn)
044/
97/7
003
Les
docu
men
ts te
chni
ques
son
t dép
osés
sou
s le
num
éro:
C73
451-
A43
0-X
1-*-
22

C79000-M7450-C156-01
Déc
lara
tio
n C
E d
e co
nfo
rmit
é
No
. 77
5.00
–10/
98
(Tra
duct
ion)
Con
stru
cteu
r:S
iem
ens
Akt
ieng
esel
lsch
aft
Ber
eich
Aut
omat
isie
rung
stec
hnik
Ges
chäf
tsge
biet
Pro
zeß
auto
mat
isie
rung
und
Inst
rum
ente
Adr
esse
:Ö
stlic
he R
hein
brüc
kens
tr. 5
0D
-761
87 K
arls
ruhe
Bun
desr
epub
lik D
euts
chla
nd
Dés
igna
tion
du p
rodu
it:P
ositi
onne
ur e
l.–pn
eum
. SIP
AR
T P
S2
avec
PR
OF
IBU
S P
A6D
R41
0*-x
x av
ec le
s m
odul
es6D
R40
04-*
Jm
odul
e I y
6DR
4004
-*A
mod
ule
d’al
arm
e
Le
pro
du
it d
ésig
né
est c
on
form
e au
x p
resc
rip
tio
ns
des
dir
ecti
ves
euro
pée
nn
es s
uiv
ante
s:
89/3
36/C
ED
irect
ive
du P
arle
men
t eu
ropé
en e
t du
Con
seil
conc
erna
nt l
e ra
ppro
chem
ent
des
légi
slat
ions
des
Éta
ts m
embr
es p
our l
a co
mpa
tibili
té é
lect
rom
agné
tique
. Mod
ifié
par l
esdi
rect
ives
91/
263/
CE
, 92/
31/C
E e
t 99/
68/C
E d
u P
arle
men
t eur
opée
n et
du
Con
seil.
Des
info
rmat
ion
s co
mp
lém
enta
ires
co
nce
rnan
t le
resp
ect d
e ce
tte
dir
ecti
ve s
on
t co
nte
nu
es d
ans
l’an
nex
e C
EM
App
ositi
on d
u m
arqu
age
CE
: 10/
98
Sie
men
s A
ktie
nges
ells
chaf
t
Kar
lsru
he, l
e 30
.10.
1998
L’an
nexe
CE
M fa
it pa
rtie
inté
gran
te d
e la
pré
sent
e dé
clar
atio
n.La
pré
sent
e dé
clar
atio
n ce
rtifi
e la
con
form
ité a
ux d
irect
ives
énu
mér
ées,
mai
s ne
con
stitu
e pa
s un
e ga
rant
ie d
e qu
alité
s au
sen
s de
la lé
gisl
atio
nsu
r la
res
pons
abili
té d
u fa
it de
pro
duits
déf
ectu
eux
Les
aver
tisse
men
ts d
e sé
curit
é fig
uran
t da
ns la
doc
umen
tatio
n du
pro
duit
doiv
ent ê
tre
resp
ecté
s.
An
nex
e C
EM
Déc
lara
tio
n C
E d
e co
nfo
rmit
éN
o.
775.
00–1
0/98
Dés
igna
tion
du p
rodu
it:P
ositi
onne
ur e
l.–pn
eum
. SIP
AR
T P
S2
avec
PR
OF
IBU
S P
A6D
R41
0*-x
x av
ec le
s m
odul
es6D
R40
04-*
Jm
odul
e I y
6DR
4004
-*A
mod
ule
d’al
arm
e
La c
onfo
rmité
du
prod
uit
dési
gné
aux
pres
crip
tions
de
la d
irect
ive
89/3
36/C
E e
st ju
stifi
ée p
ar le
res
pect
des
Nor
mes
Eur
opée
nnes
har
mon
isée
s su
ivan
tes.
Nor
mes
Eur
opée
nnes
har
mon
isée
s:
Num
éro
de ré
fére
nce
Dat
e de
pub
licat
ion
Num
éro
de ré
fére
nce
Dat
e de
pub
licat
ion
DIN
EN
500
81 P
arte
1D
IN E
N 5
0082
Par
te 2
3/19
9319
95
Les
docu
men
ts te
chni
ques
son
t dép
osés
sou
s le
num
éro:
C73
451-
A43
0-X
1-*-
22
C79000-M7450-C156-01

C79000-M7450-C156-01
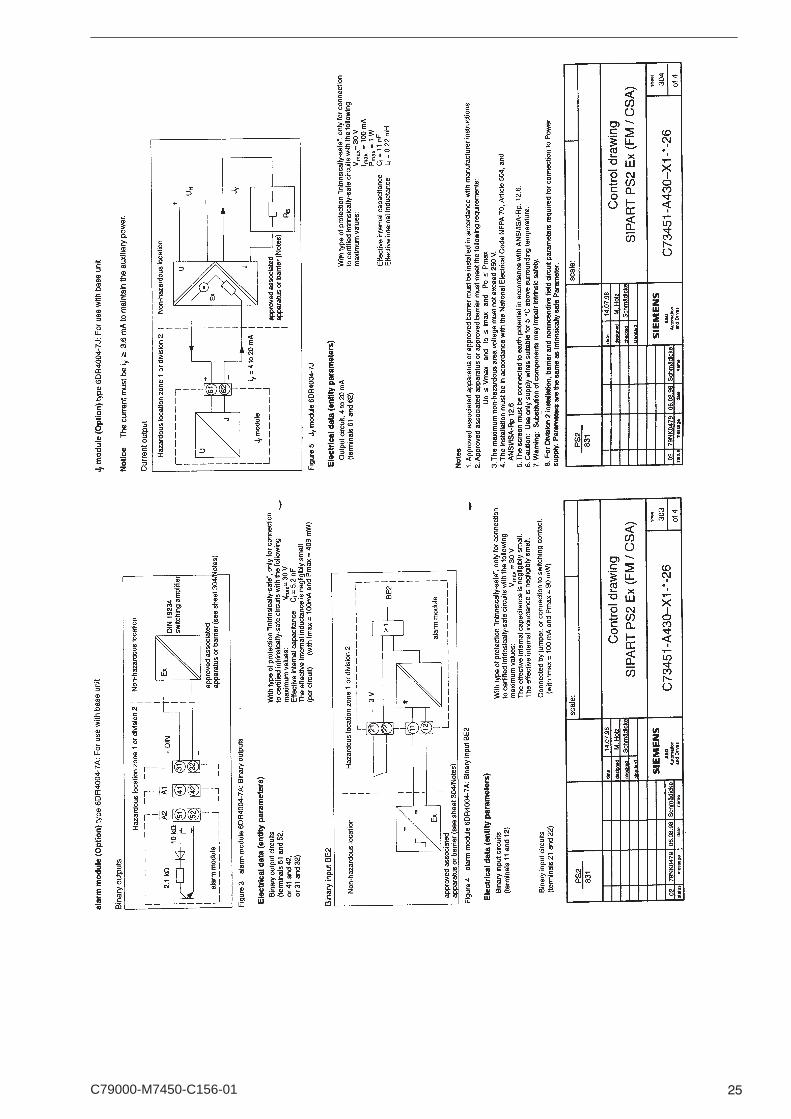
C79000-M7450-C156-01

C79000-M7450-C156-01

Vue
d'a
pp
arei
l(c
ouve
rcle
ouve
rt)
Dép
liant
"Brè
ves
inst
ruct
ions
d'ut
ilisa
tion"
(Nd
eré
f.C
7300
0-B
7477
-C15
1-4)
o
SIP
AR
TP
S2
6DR
400x
-xx
pour
les
serv
omot
eurs
àdo
uble
effe
t
Ent
rée:
alim
en-
tatio
nen
air
PZ
Sor
tie:p
ress
ion
deré
glag
eY
1D
ispl
ayS
ortie
:pre
ssio
nde
régl
age
Y2
**To
uche
sde
com
man
deE
tran
glem
entY
1E
tran
glem
entY
1**
Etr
angl
emen
tY2
**C
omm
utat
eurd
etr
ansm
issi
onpa
ren
gren
ages
Rég
lage
del'a
c-co
uple
men
tàfr
ictio
nB
orne
sde
racc
orde
-m
enta
ppar
eild
eba
seB
orne
sde
racc
orde
-m
entm
odul
esop
tionn
els
Com
mut
ateu
rd'a
irde
bala
yage
)
) )
1 2 3 4 5 66.
16.
2 7 8 9 10 11
Ch
ang
emen
tde
mod
ede
fonc
tionn
emen
t
Type
sde
racc
ord
emen
t
Sig
nal
isat
ion
sp
oss
ible
s
Pre
miè
rem
ise
ense
rvic
eau
tom
atiq
ue
(àpa
rtird
uré
glag
ed'
usin
e)
Rac
cord
emen
t2-f
ils
J
i=
4...
20m
Ay
J H+
EH
-
J W+
W-
J
Ban
de
deto
léra
nce
dow
ndé
pass
éepa
rle
hau
tou
par
leb
as
Ban
de
deto
léra
nce
updé
pass
ée
Com
mut
erl'e
ngre
nage
(7)
Rég
lerl
ele
vere
npo
sitio
nho
rizon
tale
avec
Rég
ler,
surl
ele
vier
,la
plus
proc
heva
leur
supé
rieur
ede
laco
urse
Fo
urc
het
teu
p-d
ow
ndé
pass
éepa
rle
bas
En
outr
e,po
urle
sse
rvom
oteu
rsà
frac
tion
deto
ur:
Rac
cord
emen
t3/4
-fils
U J
0/4
...2
0m
A
U=
18...
35V
H
+ -+ -
UH
+
J W+
W-
JEH
-
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
Tem
psde
posi
tion-
nem
ent
tro
pco
urt
Aug
men
ter
lete
mps
depo
si-
tionn
emen
tàl'a
ide
del'é
tran
glem
ent
cont
inue
rav
ec:
ouré
gler
l'acc
oupl
emen
tàfri
ctio
nju
squ'
àaf
ficha
gede
puis
sim
ple
men
tco
ntin
uera
vec
Lese
rvo
mo
teu
rn
ese
dép
lace
pas
Vér
ifier
l'étr
angl
emen
t(6)
etl'o
uvrir
leca
séc
héan
t
Sig
nifi
catio
nA
ffic
hag
eM
esu
res
àp
ren
dre
Pos
ition
nerl
ese
rvom
oteu
rda
nsla
plag
ede
trav
aila
vec
Acq
uitte
rave
c
Acq
uitte
rave
c
Acq
uitte
rave
c
autr
essi
gn
alis
atio
ns:
voir
man
uel
cont
inue
rave
c
cont
inue
rave
c
Red
émar
rerl
'initi
alis
atio
n
Red
émar
rerl
'initi
alis
atio
n
Red
émar
rerl
'initi
alis
atio
n
Sil
'acc
ou
ple
men
tàfr
icti
on
aét
éd
érég
lé
régl
erà
l'aid
ede
jusq
u'à
affic
hage
deLe
sens
d'ac
tion
estd
éter
min
é
Con
tróle
dela
cour
seet
ajus
tage
dupo
int
zéro
etde
laco
urse
(but
éeà
buté
e)
Dét
erm
inat
ion
du
tem
psde
posi
tionn
emen
t,ac
hiffa
gedu
tem
psdo
wn
(dxx
.x),
up(u
xx.x
)
Eta
pe
Sig
nif
icat
ion
Initi
alis
atio
nac
hevé
e(c
ours
een
mm
pour
serv
omot
eurs
linéa
ires,
angl
ede
rota
tion
pour
serv
omot
eurs
àfra
ctio
nde
tour
)
Opt
imis
atio
ndu
com
port
emen
ten
régi
me
trans
itoire
Dét
erm
inat
ion
des
incr
émen
tsde
posi
tion
min
imau
x
Ser
vom
oteu
rlin
éaire
Ser
vom
oteu
ràfr
actio
ndu
tour
*)
*)ré
glag
espo
ssib
le,v
oira
udo
s
App
uyer
sur
>5
sLe
sét
apes
suiv
ante
ss'
effe
ctue
ntau
tom
atiq
uem
ent
(Les
vale
urs
engr
isde
lapr
emiè
relig
neso
ntde
sex
empl
es.)
*)
Co
nfi
gu
rati
on
(sim
ulta
ném
ent)
(sim
ulta
ném
ent)
(sim
ulta
ném
t.)
(sim
ulta
ném
t.)
>5
s
à
BE
1B
E1
Vale
urdu
para
mèt
re
Rég
lage
dupo
tent
io-
mèt
re[%
]
Num
éro
etno
mdu
para
mèt
re
non
initi
alis
é(o
bten
uav
ecP
rese
t)
1x >5
s
Dis
pla
y
Pos
ition
[%]
Con
sign
e[%
]
Pos
ition
[%]
Con
sign
e[%
]
Au
tom
atiq
ue
Mo
de
defo
nct
.
Man
uel
Mod
ifier
leré
glag
e
P-f
onct
ionn
emen
tm
anue
l
Con
figur
atio
n
xx.x
xxx
>5
sav
ec
Mod
ifier
lapo
sitio
nav
ec
1,5
kΩ
40Ω
40Ω
1,5
kΩ9,
2V
9,2
V1.
)
3.)
4.)
6.)
7.)
5.)
8.)
2.)
>5
s
Rég
ler,
surl
ele
vier
,la
plus
proc
heva
leur
infé
rieur
ede
laco
urse
Lato
uche
prov
oque
la.
mes
ure
defu
ite
cont
inue
rave
c
66.
26.
110
3
78
9
1 2 3 4 5 6 7 8 9 10
42 1
5
90° 33
°
6
11
*)
Pou
rser
vom
oteu
rsra
pide
s,co
ntin
uera
vec:
cont
inue
rav
ec:
**)
Ava
ntde
racc
orde
rl'é
nerg
ieau
xilia
ire,r
etire
rim
péra
tivem
entl
eca
valie
rent
rele
sbo
rnes
1et
2.!
Ava
ntde
racc
orde
rl'é
nerg
ieau
xilia
ire,
retir
erim
péra
tive-
men
tle
cava
lier
entr
ele
sbo
rnes
1et
2
!Rac
cord
emen
t3/4
-fils
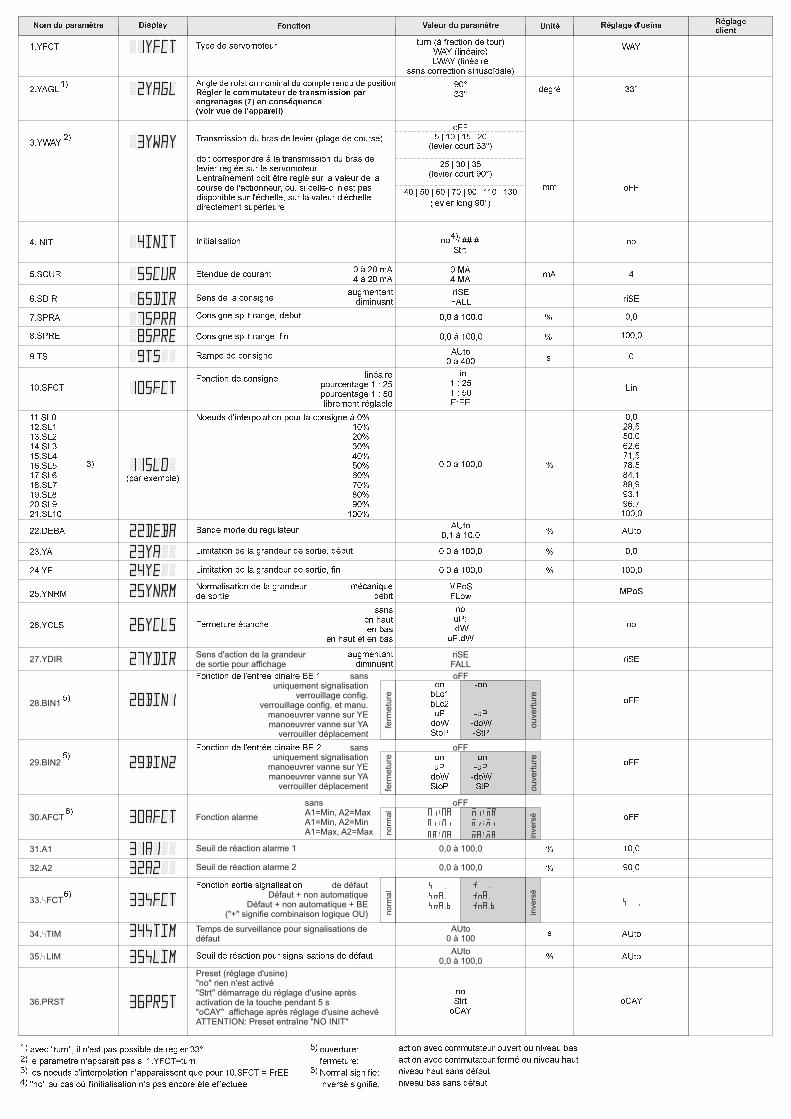
avec "turn", il n'est pas possible de régler 33°
le paramètre n'apparaît pas si 1.YFCT=turn
les noeuds d'interpolation n'apparaissent que pour 10.SFCT = FrEE
"no" au cas où l'initialisation n'a pas encore été effectuée
ouverture:
fermeture:
Normal signifie:
Inversé signifie:
1)
2)
3)
4)
5)
6)
Transmission du bras de levier (plage de course)
Initialisation
Etendue de courant
Consigne split range, début
Consigne split range, fin
Rampe de consigne
Fonction de consigne
Sens de la consigne
Noeuds d'interpolation pour la consigne à 0%10%20%30%40%50%60%70%80%90%
100%
Bande morte du régulateur
Limitation de la grandeur de sortie, début
Limitation de la grandeur de sortie, fin
Normalisation de la grandeurde sortie
Fermeture étanche
no / ##.#Strt
0 MA4 MA
riSEFALL
0,0 à 100,0
0,0 à 100,0
AUto0 à 400
AUto0,1 à 10,0
Lin1 : 251 : 50FrEE
0,0 à 100,0
0,0 à 100,0
0,0 à 100,0
MPoSFLow
nouP::dW
uP:dW
noStrtoCAY
Seuil de réaction pour signalisations de défaut
oFF5 | 10 | 15 | 20
25 | 30 | 35
40 | 50 | 60 | 70 | 90 | 110 | 130
(levier court 33°)
(levier court 90°)
(levier long 90°)
90°33°
Angle de rotation nominal du compte rendu de positionRégler le commutateur de transmission parengrenages (7) en conséquence(voir vue de l'appareil)
Type de servomoteur
3.YWAY2)
1)
4.INIT
6.SDIR
7.SPRA
8.SPRE
9.TS
10.SFCT
11.SL012.SL113.SL214.SL315.SL416.SL517.SL618.SL719.SL820.SL921.SL10
22.DEBA
23.YA
24.YE
26.YCLS
5.SCUR
3)
5)
5)
6)
6)
25.YNRM
2.YAGL
1.YFCTturn (à fraction de tour)
WAY (linéaire)LWAY (linéaire
sans correction sinusoïdale)
(par exemple)
sansen hauten bas
en haut et en bas
doit correspondre à la transmission du bras delevier réglée sur le servomoteurL'entraînement doit être réglé sur la valeur de lacourse de l'actionneur, ou, si celle-ci n'est pasdisponible sur l'échelle, sur la valeur d'échelledirectement supérieure.
0 à 20 mA4 à 20 mA
linéairepourcentage 1 : 25pourcentage 1 : 50librement réglable
mécaniquedébit
augmentantdiminuant
4)
augmentantdiminuant
onuPdoWStoP
-on-uP-doW-StP
onbLc1bLc2uPdoWStoP
-on
-uP-doW-StP
norm
al
invers
éin
vers
é
norm
al
mm
0,028,550,062,671,578,584,188,993,196,7100,0
oCAY
AUtos
%
% 10,0
90,0
oFF
oFF
oFF
riSE
no
MPoS
100,0
0,0
AUto
Lin
0
%
%
%
%
s
%
%
mA
100,0
0,0
riSE
4
% AUto
oFF
degré 33°
WAY
no
Fonction de l'entrée binaire BE 1
Fonction de l'entrée binaire BE 2
Fonction sortie signalisation
action avec commutateur ouvert ou niveau bas
action avec commutateur fermé ou niveau haut
niveau haut sans défaut
niveau bas sans défaut
Nom du paramètre Display Fonction Valeur du paramètre Unité Réglage d'usine Réglageclient

Vue
d'a
pp
arei
l(c
ouve
rcle
ouve
rt)
Dép
liant
"Brè
ves
inst
ruct
ions
d'ut
ilisa
tion"
(Nd
eré
f.C
7900
0-B
7477
-C16
0-01
)o
SIP
AR
TP
S2
PA6
DR
410x
-xx
pour
les
serv
omot
eurs
àdo
uble
effe
t
Ent
rée:
alim
en-
tatio
nen
air
PZ
Sor
tie:p
ress
ion
deré
glag
eY
1D
ispl
ayS
ortie
:pre
ssio
nde
régl
age
Y2
**To
uche
sde
com
man
deE
tran
glem
entY
1E
tran
glem
entY
1**
Etr
angl
emen
tY2
**C
omm
utat
eurd
etr
ansm
issi
onpa
ren
gren
ages
Rég
lage
del'a
c-co
uple
men
tàfr
ictio
nB
orne
sde
racc
orde
-m
enta
ppar
eild
eba
seB
orne
sde
racc
orde
-m
entm
odul
esop
tionn
els
Com
mut
ateu
rd'a
irde
bala
yage
)
) )
1 2 3 4 5 66.
16.
2 7 8 9 10 11
Ch
ang
emen
tde
mod
ede
fonc
tionn
emen
t
Rac
cord
emen
t
Sig
nal
isat
ion
sp
oss
ible
s
Pre
miè
rem
ise
ense
rvic
eau
tom
atiq
ue
(àpa
rtird
uré
glag
ed'
usin
e)
Ban
de
deto
léra
nce
dow
ndé
pass
éepa
rle
hau
tou
par
leb
as
Ban
de
deto
léra
nce
updé
pass
ée
Com
mut
erl'e
ngre
nage
(7)
Rég
lerl
ele
vere
npo
sitio
nho
rizon
tale
avec
Rég
ler,
surl
ele
vier
,la
plus
proc
heva
leur
supé
rieur
ede
laco
urse
Fo
urc
het
teu
p-d
ow
ndé
pass
éepa
rle
bas
En
outr
e,po
urle
sse
rvom
oteu
rsà
frac
tion
deto
ur:
Tem
psde
posi
tion-
nem
ent
tro
pco
urt
Aug
men
ter
lete
mps
depo
si-
tionn
emen
tàl'a
ide
del'é
tran
glem
ent
cont
inue
rav
ec:
ouré
gler
l'acc
oupl
emen
tàfri
ctio
nju
squ'
àaf
ficha
gede
puis
sim
ple
men
tco
ntin
uera
vec
Lese
rvo
mo
teu
rn
ese
dép
lace
pas
Vér
ifier
l'étr
angl
emen
t(6)
etl'o
uvrir
leca
séc
héan
t
Sig
nifi
catio
nA
ffic
hag
eM
esu
res
àp
ren
dre
Pos
ition
nerl
ese
rvom
oteu
rda
nsla
plag
ede
trav
aila
vec
Acq
uitte
rave
c
Acq
uitte
rave
c
Acq
uitte
rave
c
autr
essi
gn
alis
atio
ns:
voir
man
uel
cont
inue
rave
c
cont
inue
rave
c
Red
émar
rerl
'initi
alis
atio
n
Red
émar
rerl
'initi
alis
atio
n
Red
émar
rerl
'initi
alis
atio
n
Sil
'acc
ou
ple
men
tàfr
icti
on
aét
éd
érég
lé
régl
erà
l'aid
ede
jusq
u'à
affic
hage
deLe
sens
d'ac
tion
estd
éter
min
é
Con
tróle
dela
cour
seet
ajus
tage
dupo
int
zéro
etde
laco
urse
(but
éeà
buté
e)
Dét
erm
inat
ion
du
tem
psde
posi
tionn
emen
t,ac
hiffa
gedu
tem
psdo
wn
(dxx
.x),
up(u
xx.x
)
Eta
pe
Sig
nif
icat
ion
Initi
alis
atio
nac
hevé
e(c
ours
een
mm
pour
serv
omot
eurs
linéa
ires,
angl
ede
rota
tion
pour
serv
omot
eurs
àfra
ctio
nde
tour
)
Opt
imis
atio
ndu
com
port
emen
ten
régi
me
trans
itoire
Dét
erm
inat
ion
des
incr
émen
tsde
posi
tion
min
imau
x
Ser
vom
oteu
rlin
éaire
Ser
vom
oteu
ràfr
actio
ndu
tour
*)
*)ré
glag
espo
ssib
le,v
oira
udo
s
App
uyer
sur
>5
sLe
sét
apes
suiv
ante
ss'
effe
ctue
ntau
tom
atiq
uem
ent
(Les
vale
urs
engr
isde
lapr
emiè
relig
neso
ntde
sex
empl
es.)
*)
Co
nfi
gu
rati
on
(sim
ulta
ném
ent)
(sim
ulta
ném
ent)
(sim
ulta
ném
t.)
(sim
ulta
ném
t.)
>5
s
à
Vale
urdu
para
mèt
re
Rég
lage
dupo
tent
io-
mèt
re[%
]
Num
éro
etno
mdu
para
mèt
re
non
initi
alis
é(o
bten
uav
ecP
rese
t)
1x >5
s
Dis
pla
y
Pos
ition
[%]
Con
sign
e[%
]
Pos
ition
[%]
Con
sign
e[%
]
Au
tom
atiq
ue
Mo
de
defo
nct
.
Man
uel
Mod
ifier
leré
glag
e
P-f
onct
ionn
emen
tm
anue
l
Con
figur
atio
n
xx.x
xxx
>5
sav
ec
Mod
ifier
lapo
sitio
nav
ec
1.)
3.)
4.)
6.)
7.)
5.)
8.)
2.)
>5
s
Rég
ler,
surl
ele
vier
,la
plus
proc
heva
leur
infé
rieur
ede
laco
urse
Lato
uche
prov
oque
la.
mes
ure
defu
ite
cont
inue
rave
c
*)
Pou
rser
vom
oteu
rsra
pide
s,co
ntin
uera
vec:
cont
inue
rav
ec:
**)
89
3 7 9 10
42 1
56
6.2
6.1
10
3
7
90° 33
°
6
11
Cou
pleu
rD
P/P
A
9...
24V
10973
Ent
rée
bina
ire1
Pos
ition
neur
+3V
-+P
RO
FIB
US
PAIE
C11
58-2
#
#A

avec "turn", il n'est pas possible de régler 33°
le paramètre n'apparaît pas si 1.YFCT=turn
non actif avec TSI=AUTO
les noeuds d'interpolation n'apparaissent que pour 8.SFCT = FrEE
1)
2)
3)
4)
5)
6)
3.YWAYPlage de course réglage optional
Si utilisé, doit correspondre à la transmissiondu bras de levier réglée sur le servomoteur
L'entraînement doit être réglé sur la valeur de lacourse de l'actionneur, ou, si celle-ci n'est pasdisponible sur l'échelle, sur la valeur d'échelledirectement supérieure.
( )
mm
2)
1)
4.INIT
6.TSI
7.TSD
8.SFCT
09.SL010.SL1etc. jusqu'à28.SL1929.SL20
Initialisation
Rampe de consigne OUVERTE
Rampe de consigne FERMEE
Fonction de consigne
Sens de la consigne
Noeuds d'interpolation pour la consigne à 0%5%
etc. jusqu'à95%
100%
0.05.0
etc. jusqu'à95.0100.0
5.SDIR
no / ###.#Strt
riSEFALL
AUto0 à 400
0 à 400
Lin1 : 33
FrEEn1 : 33
1 : 50n1 : 50
1 : 25n1 : 25
0,0 à 100,0
Lin
0
0
%
s
s
riSE
4)
3)
oFF
40 | 50 | 60 | 70 | 90 | 110 | 130
25 | 30 | 35
5 | 10 | 15 | 20
oFF
(levier court 33°)
(levier court 90°)
(levier long 90°)
2.YAGL90°33°
degré 33°Angle de rotation nominal du compte rendu de positionRégler le commutateur de transmission parengrenages (7) en conséquence(voir vue de l'appareil)
Type de servomoteur1.YFCT WAYturn (à fraction de tour)
WAY (linéaire)LWAY (linéaire
sans correction sinusoïdale)
(par exemple)
no
linéairepourcentage 1: 25, 1:33, 1:50
invers pourcentage 25:1, 33:1, 50:1librement réglable
30.DEBA
31.YA
32.YE
34.YCLS
35.YCDO
36.YCUP
Bande morte du régulateur
Limitation de la grandeur de sortie, début
Limitation de la grandeur de sortie, fin
Normalisation de la grandeurde sortie
Fermeture étanche
Valeur pour fermeture étanche en bas
Valeur pour fermeture étanche en haut
AUto0,1 à 10,0
0,0 à 100,0
0,0 à 100,0
0,0 à 100,0
0,0 à 100,0
MPoSFLow
nouP::dW
uP:dW
no
MPoS
100,0
100,0
0,0
0,0
AUto
%
%
%
33.YNRM
sansen hauten bas
en haut et en bas
mécaniquedébit
6)
6)
augmentantdiminuant
%
%
30
126
0,0
90,0
10,0
oFF
oFF
oFF5)
5) onuPdoWStoP
-on-uP-doW-StP
onbLc1bLc2uPdoWStoP
-on
-uP-doW-StP
noStrtoCAY
FSVLFSSPFSAC
FSVL
no
AUtos
s
%
%
AUtoSeuil de réaction pour signalisations de défaut
Nom du paramètre Display Fonction Valeur du paramètre Unité Réglage d'usine Réglageclient
Fonction de l'entrée binaire BE 1
Fonction de l'entrée binaire BE 2
Fonction sortie signalisation
action avec commutateur ouvert ou niveau bas
action avec commutateur fermé ou niveau haut
niveau haut sans défaut
niveau bas sans défaut
ouverture:
fermeture:
Normal signifie:
Inversé signifie:

C79000-M7450-C156-01
IndicePagina
1 Avvertenze relative alla sicurezza 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1 Significato delle avvertenze 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Introduzione 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Dotazione standard del posizionatore 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Montaggio 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 Generalità 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Accessori di montaggio ”Attuatore lineare” 6DR4004–8V e 6DR4004–8L 34. . . . . . . . . . . . . . . . . . . . . . 3.2.1 Operazioni di montaggio (vedi figura 1) 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Accessori di montaggio ”Attuatore a rotazione” 6DR4004–8D 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Operazioni di montaggio (vedi figura 2) 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Moduli opzionali (vedi figura 3, Appendice) 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Collegamento elettrico 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Collegamenti pneumatici (vedi figura 16, Appendice) 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Messa in servizio (vedi pieghevole “Uso in sintesi”) 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1 Preparazioni per attuatori a spinta 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1.1 Inizializzazione di attuatori a spinta 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2 Preparativi per attuatori a rotazione 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2.1 Inizializzazione di attuatori a rotazione 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Conformità 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Le figure da 3 a 17 si trovano in appendice.
C79000-M7450-C156-01
1 Avvertenze relative alla sicurezza
1.1 Significato delle avvertenze
!Pericolo
significa che esiste il rischio di morte, lesioni gravi alle persone o danni considerevoli alle cose, senon si prendono le opportune precauzioni.
!Attenzione
significa che si possono verificare lesioni lievi alle persone e/o danni alle cose, se non si prendonole opportune misure precauzionali.
Nota
è un’informazione importante sul prodotto stesso, sul suo utilizzo oppure sulla parte del manuale,sulla quale si vuole attirare in modo particolare l’attenzione del lettore.
1.2 Introduzione
Le presenti istruzioni di montaggio e installazione sono da considerarsi istruzioni per l’uso ai sensi della direttivadel Consiglio delle Comunità europee del 23 marzo 1994 (94/9/CE). In esse sono descritte le operazioni fonda-mentali per il montaggio, il collegamento e la messa in servizio.
Le istruzioni di montaggio e installazione non sostituiscono il manuale per il posizionatore elettropneumaticoSIPART PS2. Il manuale dell’apparecchiatura contiene informazioni più dettagliate sulla costruzione, il funziona-mento e l’utilizzo.
Il manuale può essere ordinato presso una delle filiali Siemens, indicando il numero di ordinazione
C79000–G7400–C158 (tedesco)C79000–G7476–C158 (inglese).
Le istruzioni di montaggio e installazione e il manuale dell’apparecchiatura valgono per il posizionatore senza econ comunicazione PROFIBUS PA. Le differenze sono corrispondentemente contrassegnate.
Funzionamento sicuroL’apparecchiatura descritta è stata spedita dopo essere stata controllata e collaudata anche dal punto di vista dellasicurezza. Al fine di conservare tale stato e garantire un funzionamento sicuro dell’apparecchio si devono osser-vare le note e le avvertenze riportate in queste Istruzioni di montaggio e installazione.
Personale qualificatoIn relazione a queste Istruzioni di montaggio e installazione, per personale qualificato si intende persone in gradodi eseguire il montaggio e la messa in servizio e di provvedere al funzionamento di questo prodotto. Persone cheper l’attività svolta possiedono opportune qualificazioni, come per es.:
istruzione o preparazione ovvero autorizzazione ad eseguire collegamenti, la messa a terra e la marcaturadi circuiti elettrici e apparecchiature o sistemi secondo gli standard di sicurezza in vigore;
istruzione o preparazione secondo gli standard di sicurezza in vigore per la manutenzione e l’uso di adeguateattrezzature di sicurezza;
addestramento in pronto soccorso; per le apparecchiature con protezione antideflagrante: istruzione o preparazione ovvero autorizzazione ad
eseguire lavori su circuiti elettrici in impianti con pericolo di esplosione.
!Pericolo
L’apparecchiatura può essere montata e messa in servizio solo da personale qualificato. L’apparecchiatura è studiata per il collegamento a tensione di funzionamento e di alimentazioneinferiore ai 42 V.La sicurezza elettrica dipende esclusivamente dalle apparecchiature che alimentano il posiziona-tore.Gli attuatori pneumatici forniscono una notevole spinta. Pertanto per evitare lesioni il montaggio e lamessa in servizio vanno eseguiti osservando scrupolosamente le vigenti norme di sicurezza. Si fa espresso invito al rispetto delle norme di sicurezza per gli impianti con pericolo di esplosione.
Il funzionamento ineccepibile e sicuro di questa apparecchiatura presuppone che il trasporto avvenga in modoadeguato, che l’immagazzinamento, l’installazione e il montaggio siano effettuati a regola d’arte e che l’utilizzoe la manutenzione avvengano con la necessaria accuratezza.
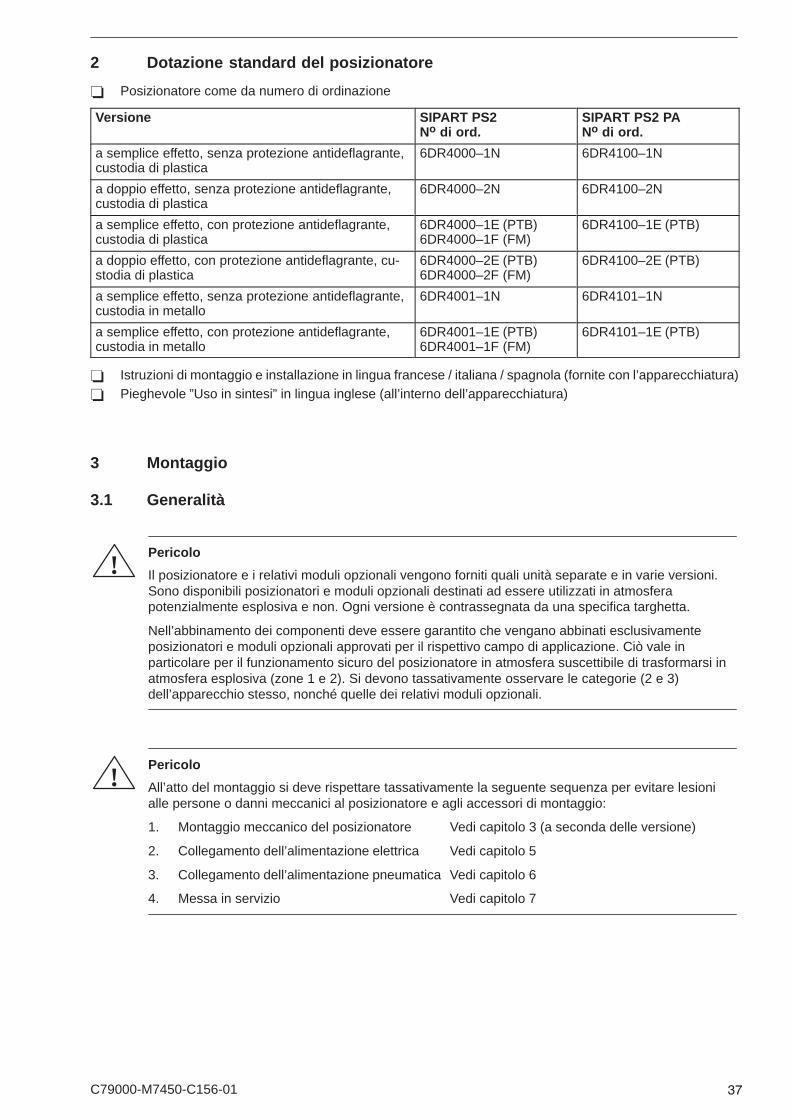
C79000-M7450-C156-01
2 Dotazione standard del posizionatore
Posizionatore come da numero di ordinazione
Versione SIPART PS2 No di ord.
SIPART PS2 PA No di ord.
a semplice effetto, senza protezione antideflagrante,custodia di plastica
6DR4000–1N 6DR4100–1N
a doppio effetto, senza protezione antideflagrante,custodia di plastica
6DR4000–2N 6DR4100–2N
a semplice effetto, con protezione antideflagrante,custodia di plastica
6DR4000–1E (PTB)6DR4000–1F (FM)
6DR4100–1E (PTB)
a doppio effetto, con protezione antideflagrante, cu-stodia di plastica
6DR4000–2E (PTB)6DR4000–2F (FM)
6DR4100–2E (PTB)
a semplice effetto, senza protezione antideflagrante,custodia in metallo
6DR4001–1N 6DR4101–1N
a semplice effetto, con protezione antideflagrante,custodia in metallo
6DR4001–1E (PTB)6DR4001–1F (FM)
6DR4101–1E (PTB)
Istruzioni di montaggio e installazione in lingua francese / italiana / spagnola (fornite con l’apparecchiatura) Pieghevole ”Uso in sintesi” in lingua inglese (all’interno dell’apparecchiatura)
3 Montaggio
3.1 Generalità
!Pericolo
Il posizionatore e i relativi moduli opzionali vengono forniti quali unità separate e in varie versioni.Sono disponibili posizionatori e moduli opzionali destinati ad essere utilizzati in atmosferapotenzialmente esplosiva e non. Ogni versione è contrassegnata da una specifica targhetta.
Nell’abbinamento dei componenti deve essere garantito che vengano abbinati esclusivamenteposizionatori e moduli opzionali approvati per il rispettivo campo di applicazione. Ciò vale inparticolare per il funzionamento sicuro del posizionatore in atmosfera suscettibile di trasformarsi inatmosfera esplosiva (zone 1 e 2). Si devono tassativamente osservare le categorie (2 e 3)dell’apparecchio stesso, nonché quelle dei relativi moduli opzionali.
!Pericolo
All’atto del montaggio si deve rispettare tassativamente la seguente sequenza per evitare lesionialle persone o danni meccanici al posizionatore e agli accessori di montaggio:
1. Montaggio meccanico del posizionatore Vedi capitolo 3 (a seconda delle versione)
2. Collegamento dell’alimentazione elettrica Vedi capitolo 5
3. Collegamento dell’alimentazione pneumatica Vedi capitolo 6
4. Messa in servizio Vedi capitolo 7
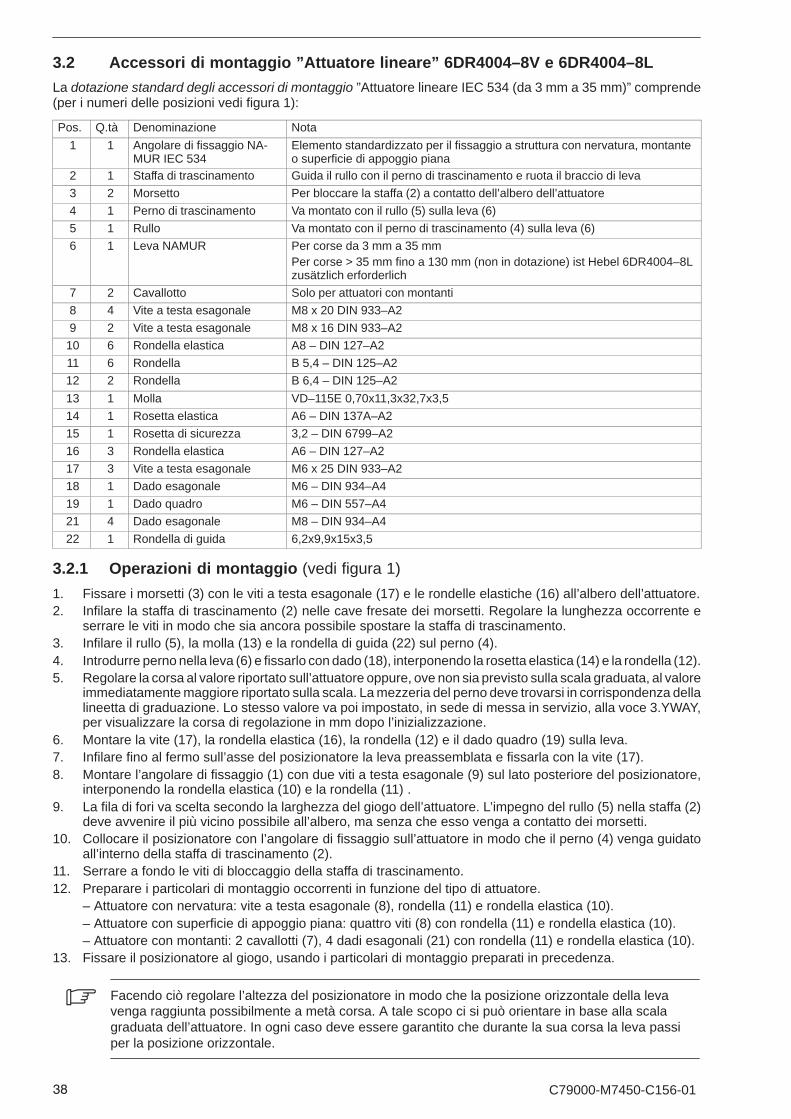
C79000-M7450-C156-01
3.2 Accessori di montaggio ”Attuatore lineare” 6DR4004–8V e 6DR4004–8L
La dotazione standard degli accessori di montaggio ”Attuatore lineare IEC 534 (da 3 mm a 35 mm)” comprende(per i numeri delle posizioni vedi figura 1):
Pos. Q.tà Denominazione Nota
1 1 Angolare di fissaggio NA-MUR IEC 534
Elemento standardizzato per il fissaggio a struttura con nervatura, montanteo superficie di appoggio piana
2 1 Staffa di trascinamento Guida il rullo con il perno di trascinamento e ruota il braccio di leva
3 2 Morsetto Per bloccare la staffa (2) a contatto dell’albero dell’attuatore
4 1 Perno di trascinamento Va montato con il rullo (5) sulla leva (6)
5 1 Rullo Va montato con il perno di trascinamento (4) sulla leva (6)
6 1 Leva NAMUR Per corse da 3 mm a 35 mmPer corse > 35 mm fino a 130 mm (non in dotazione) ist Hebel 6DR4004–8Lzusätzlich erforderlich
7 2 Cavallotto Solo per attuatori con montanti
8 4 Vite a testa esagonale M8 x 20 DIN 933–A2
9 2 Vite a testa esagonale M8 x 16 DIN 933–A2
10 6 Rondella elastica A8 – DIN 127–A2
11 6 Rondella B 5,4 – DIN 125–A2
12 2 Rondella B 6,4 – DIN 125–A2
13 1 Molla VD–115E 0,70x11,3x32,7x3,5
14 1 Rosetta elastica A6 – DIN 137A–A2
15 1 Rosetta di sicurezza 3,2 – DIN 6799–A2
16 3 Rondella elastica A6 – DIN 127–A2
17 3 Vite a testa esagonale M6 x 25 DIN 933–A2
18 1 Dado esagonale M6 – DIN 934–A4
19 1 Dado quadro M6 – DIN 557–A4
21 4 Dado esagonale M8 – DIN 934–A4
22 1 Rondella di guida 6,2x9,9x15x3,5
3.2.1 Operazioni di montaggio (vedi figura 1)
1. Fissare i morsetti (3) con le viti a testa esagonale (17) e le rondelle elastiche (16) all’albero dell’attuatore.2. Infilare la staffa di trascinamento (2) nelle cave fresate dei morsetti. Regolare la lunghezza occorrente e
serrare le viti in modo che sia ancora possibile spostare la staffa di trascinamento.3. Infilare il rullo (5), la molla (13) e la rondella di guida (22) sul perno (4).4. Introdurre perno nella leva (6) e fissarlo con dado (18), interponendo la rosetta elastica (14) e la rondella (12).5. Regolare la corsa al valore riportato sull’attuatore oppure, ove non sia previsto sulla scala graduata, al valore
immediatamente maggiore riportato sulla scala. La mezzeria del perno deve trovarsi in corrispondenza dellalineetta di graduazione. Lo stesso valore va poi impostato, in sede di messa in servizio, alla voce 3.YWAY,per visualizzare la corsa di regolazione in mm dopo l’inizializzazione.
6. Montare la vite (17), la rondella elastica (16), la rondella (12) e il dado quadro (19) sulla leva.7. Infilare fino al fermo sull’asse del posizionatore la leva preassemblata e fissarla con la vite (17).8. Montare l’angolare di fissaggio (1) con due viti a testa esagonale (9) sul lato posteriore del posizionatore,
interponendo la rondella elastica (10) e la rondella (11) .9. La fila di fori va scelta secondo la larghezza del giogo dell’attuatore. L’impegno del rullo (5) nella staffa (2)
deve avvenire il più vicino possibile all’albero, ma senza che esso venga a contatto dei morsetti.10. Collocare il posizionatore con l’angolare di fissaggio sull’attuatore in modo che il perno (4) venga guidato
all’interno della staffa di trascinamento (2).11. Serrare a fondo le viti di bloccaggio della staffa di trascinamento.12. Preparare i particolari di montaggio occorrenti in funzione del tipo di attuatore.
– Attuatore con nervatura: vite a testa esagonale (8), rondella (11) e rondella elastica (10).– Attuatore con superficie di appoggio piana: quattro viti (8) con rondella (11) e rondella elastica (10).– Attuatore con montanti: 2 cavallotti (7), 4 dadi esagonali (21) con rondella (11) e rondella elastica (10).
13. Fissare il posizionatore al giogo, usando i particolari di montaggio preparati in precedenza.
Facendo ciò regolare l’altezza del posizionatore in modo che la posizione orizzontale della levavenga raggiunta possibilmente a metà corsa. A tale scopo ci si può orientare in base alla scalagraduata dell’attuatore. In ogni caso deve essere garantito che durante la sua corsa la leva passiper la posizione orizzontale.

C79000-M7450-C156-01
in caso di necessità
Montaggio su giogo con mon-tanti
Montaggio su giogo con super-ficie di appoggiopiana
Montaggio su giogocon nervatura
2)
4)
4 5
1322
612
14
19
1216
17
8
1
10
11
7
21
11 10
11
8
10
18
3)9
1011
910
11
1
1)
2
17
16
3
Figura 1 Sequenza di montaggio (attuatore lineare)
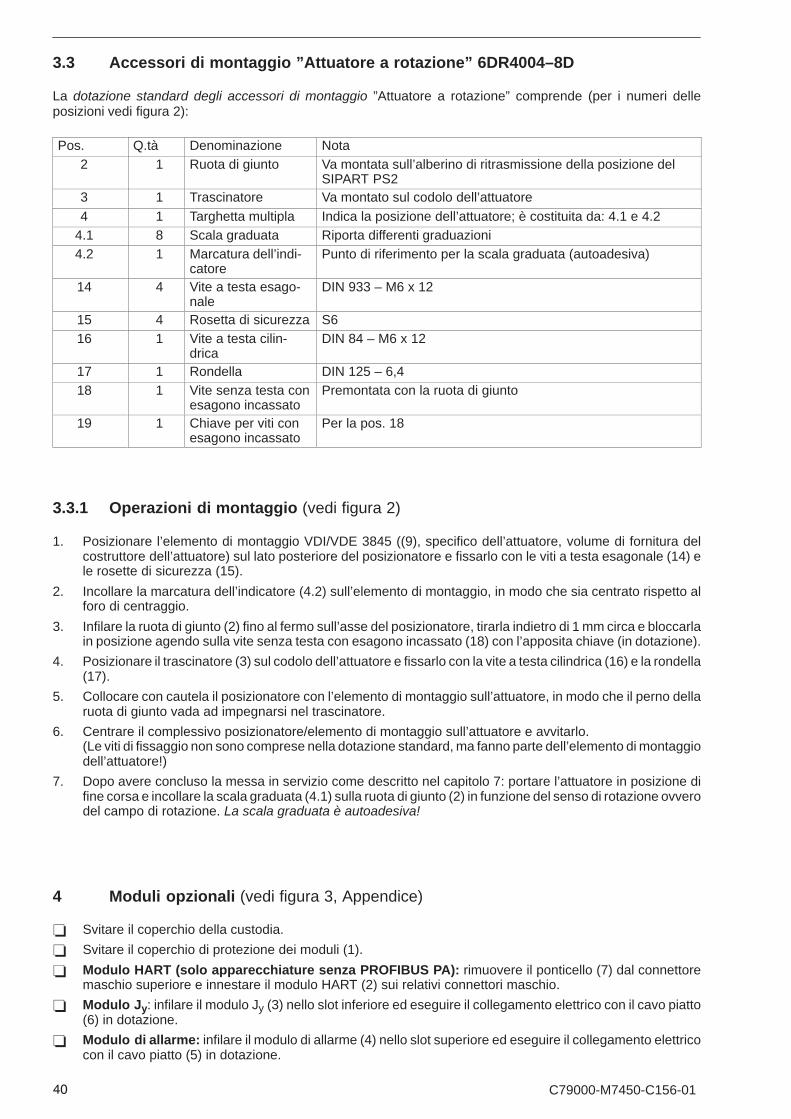
C79000-M7450-C156-01
3.3 Accessori di montaggio ”Attuatore a rotazione” 6DR4004–8D
La dotazione standard degli accessori di montaggio ”Attuatore a rotazione” comprende (per i numeri delleposizioni vedi figura 2):
Pos. Q.tà Denominazione Nota2 1 Ruota di giunto Va montata sull’alberino di ritrasmissione della posizione del
SIPART PS23 1 Trascinatore Va montato sul codolo dell’attuatore4 1 Targhetta multipla Indica la posizione dell’attuatore; è costituita da: 4.1 e 4.2
4.1 8 Scala graduata Riporta differenti graduazioni4.2 1 Marcatura dell’indi-
catorePunto di riferimento per la scala graduata (autoadesiva)
14 4 Vite a testa esago-nale
DIN 933 – M6 x 12
15 4 Rosetta di sicurezza S616 1 Vite a testa cilin-
dricaDIN 84 – M6 x 12
17 1 Rondella DIN 125 – 6,418 1 Vite senza testa con
esagono incassatoPremontata con la ruota di giunto
19 1 Chiave per viti conesagono incassato
Per la pos. 18
3.3.1 Operazioni di montaggio (vedi figura 2)
1. Posizionare l’elemento di montaggio VDI/VDE 3845 ((9), specifico dell’attuatore, volume di fornitura delcostruttore dell’attuatore) sul lato posteriore del posizionatore e fissarlo con le viti a testa esagonale (14) ele rosette di sicurezza (15).
2. Incollare la marcatura dell’indicatore (4.2) sull’elemento di montaggio, in modo che sia centrato rispetto alforo di centraggio.
3. Infilare la ruota di giunto (2) fino al fermo sull’asse del posizionatore, tirarla indietro di 1 mm circa e bloccarlain posizione agendo sulla vite senza testa con esagono incassato (18) con l’apposita chiave (in dotazione).
4. Posizionare il trascinatore (3) sul codolo dell’attuatore e fissarlo con la vite a testa cilindrica (16) e la rondella(17).
5. Collocare con cautela il posizionatore con l’elemento di montaggio sull’attuatore, in modo che il perno dellaruota di giunto vada ad impegnarsi nel trascinatore.
6. Centrare il complessivo posizionatore/elemento di montaggio sull’attuatore e avvitarlo.(Le viti di fissaggio non sono comprese nella dotazione standard, ma fanno parte dell’elemento di montaggiodell’attuatore!)
7. Dopo avere concluso la messa in servizio come descritto nel capitolo 7: portare l’attuatore in posizione difine corsa e incollare la scala graduata (4.1) sulla ruota di giunto (2) in funzione del senso di rotazione ovverodel campo di rotazione. La scala graduata è autoadesiva!
4 Moduli opzionali (vedi figura 3, Appendice)
Svitare il coperchio della custodia.
Svitare il coperchio di protezione dei moduli (1).
Modulo HART (solo apparecchiature senza PROFIBUS PA): rimuovere il ponticello (7) dal connettoremaschio superiore e innestare il modulo HART (2) sui relativi connettori maschio.
Modulo Jy: infilare il modulo Jy (3) nello slot inferiore ed eseguire il collegamento elettrico con il cavo piatto(6) in dotazione.
Modulo di allarme: infilare il modulo di allarme (4) nello slot superiore ed eseguire il collegamento elettricocon il cavo piatto (5) in dotazione.

C79000-M7450-C156-01
0% 20 40 60 80 100%
2)
3)
4)5)
182
9
4.2
3
16
17
24.1
2
3
1)9
1415
Figura 2 Sequenza di montaggio (attuatore a rotazione)

C79000-M7450-C156-01
5 Collegamento elettrico
Apparecchiature senza PROFIBUS PA
(vedi figure da 5, 6 e 10 a 15, Appendice)Collegamento elettrico: morsetti a vite 1,5Pressacavo: PG 13Campo del segnaleSetpoint w: 4 ... 20 mA in caso di collegamento a 2 fili (vedi figura 5, Appendice)
tensione di carico occorrente ≥10 V senza modulo HART, ≥11 V con modulo HART
0/4 ... 20 mA in caso di collegamento a 3 o a 4 fili (vedi figura 6, Appendice) tensione di carico 0,8 V senza modulo HART, 1,8 V con modulo HART tensione di alimentazione UH: da +18 V a +35 V(+30 V in esecuzione Ex)
Nota
Prima del funzionamento con collegamento a 3/4 fili si deve tassativamente rimuovere il ponticellotra i morsetti 1 e 2.
Apparecchiature con PROFIBUS PA
(vedi figure da 7 a 9, Appendice)Collegamento elettrico: morsetti a vite 1,5Pressacavo: PG 13Alimentazione energia ausiliaria: alimentazione tramite busTensione bus: da 9 a 24 V con funzionamento a sicurezza intrinseca
da 9 a 32 V con funzionamento senza sicurezza intrinsecaPolarizzazione: a piacereAssorbimento corrente: 12 mA ± 10%Limitatore elettronico di corrente: lmax ≤ 16 mA in caso di guasto
Montaggio del cavo bus
1. Isolare il cavo bus come indicato in figura 7, Appendice.2. Aprire la scatola del posizionatore, allentando le quattro viti del coperchio.3. Infilare il cavo bus preparato attraverso il collegamento a vite PG.4. Fissare lo schermo alla scatola con la fascetta e le due viti.5. Serrare la connessione PG.6. Collegare il cavo rosso e verde come indicato in figura 8 ai morsetti 3 e 7 del circuito stampato
(la polarità non ha nessuna importanza).
6 Collegamenti pneumatici (vedi figura 16, Appendice)
!Pericolo
Per motivi di sicurezza dopo il montaggio l’alimentazione pneumatica può essere inseritaesclusivamente se, a segnale elettrico applicato, il posizionatore si trova nella modalità di comandoP–Funzionamento in manuale (Lieferzustand, vedi pieghevole ”Uso in sintesi”).
Nota
Prestare attenzione alla qualità dell’aria! Aria compressa non grassa, particelle solide < 30 m,punto di rugiada di 20 K inferiore alla più bassa temperatura ambiente.
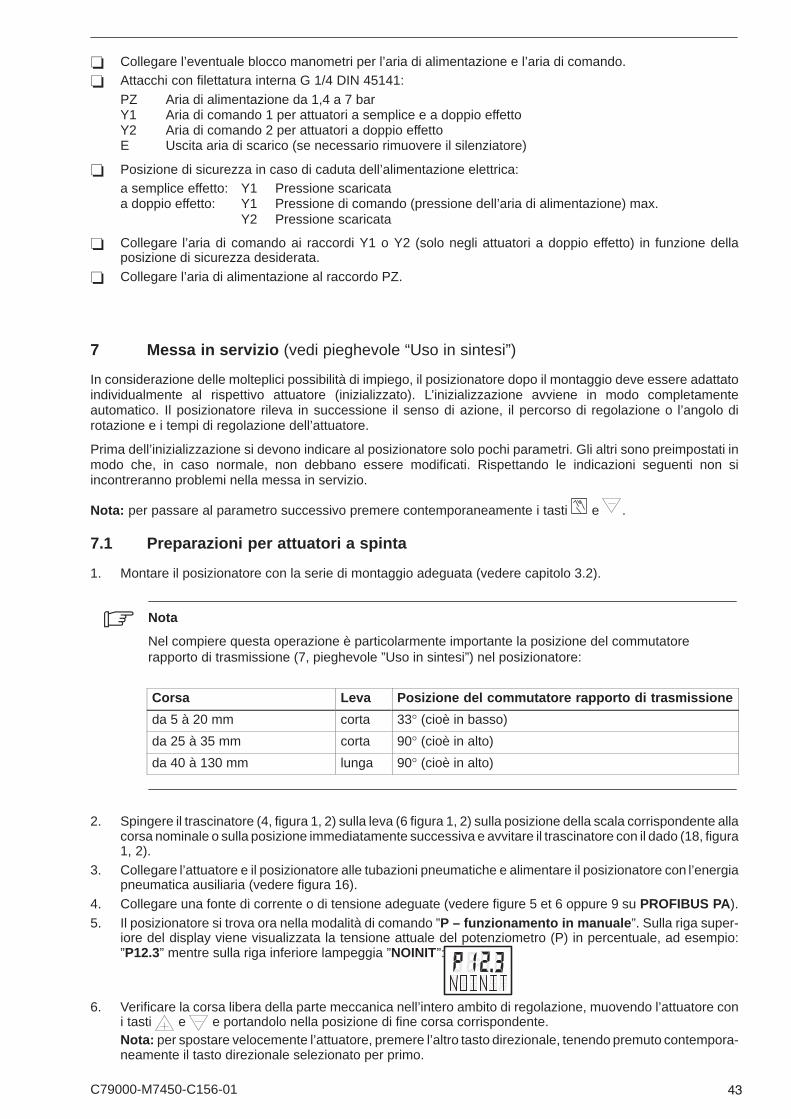
C79000-M7450-C156-01
Collegare l’eventuale blocco manometri per l’aria di alimentazione e l’aria di comando. Attacchi con filettatura interna G 1/4 DIN 45141:
PZ Aria di alimentazione da 1,4 a 7 barY1 Aria di comando 1 per attuatori a semplice e a doppio effettoY2 Aria di comando 2 per attuatori a doppio effettoE Uscita aria di scarico (se necessario rimuovere il silenziatore)
Posizione di sicurezza in caso di caduta dell’alimentazione elettrica:a semplice effetto: Y1 Pressione scaricataa doppio effetto: Y1 Pressione di comando (pressione dell’aria di alimentazione) max.
Y2 Pressione scaricata
Collegare l’aria di comando ai raccordi Y1 o Y2 (solo negli attuatori a doppio effetto) in funzione dellaposizione di sicurezza desiderata.
Collegare l’aria di alimentazione al raccordo PZ.
7 Messa in servizio (vedi pieghevole “Uso in sintesi”)
In considerazione delle molteplici possibilità di impiego, il posizionatore dopo il montaggio deve essere adattatoindividualmente al rispettivo attuatore (inizializzato). L’inizializzazione avviene in modo completamenteautomatico. Il posizionatore rileva in successione il senso di azione, il percorso di regolazione o l’angolo dirotazione e i tempi di regolazione dell’attuatore.
Prima dell’inizializzazione si devono indicare al posizionatore solo pochi parametri. Gli altri sono preimpostati inmodo che, in caso normale, non debbano essere modificati. Rispettando le indicazioni seguenti non siincontreranno problemi nella messa in servizio.
Nota: per passare al parametro successivo premere contemporaneamente i tasti e .
7.1 Preparazioni per attuatori a spinta
1. Montare il posizionatore con la serie di montaggio adeguata (vedere capitolo 3.2).
Nota
Nel compiere questa operazione è particolarmente importante la posizione del commutatorerapporto di trasmissione (7, pieghevole ”Uso in sintesi”) nel posizionatore:
Corsa Leva Posizione del commutatore rapporto di trasmissione
da 5 à 20 mm corta 33° (cioè in basso)
da 25 à 35 mm corta 90° (cioè in alto)
da 40 à 130 mm lunga 90° (cioè in alto)
2. Spingere il trascinatore (4, figura 1, 2) sulla leva (6 figura 1, 2) sulla posizione della scala corrispondente allacorsa nominale o sulla posizione immediatamente successiva e avvitare il trascinatore con il dado (18, figura1, 2).
3. Collegare l’attuatore e il posizionatore alle tubazioni pneumatiche e alimentare il posizionatore con l’energiapneumatica ausiliaria (vedere figura 16).
4. Collegare una fonte di corrente o di tensione adeguate (vedere figure 5 et 6 oppure 9 su PROFIBUS PA).5. Il posizionatore si trova ora nella modalità di comando ”P – funzionamento in manuale”. Sulla riga super-
iore del display viene visualizzata la tensione attuale del potenziometro (P) in percentuale, ad esempio:”P12.3” mentre sulla riga inferiore lampeggia ”NOINIT”:
6. Verificare la corsa libera della parte meccanica nell’intero ambito di regolazione, muovendo l’attuatore coni tasti e e portandolo nella posizione di fine corsa corrispondente.Nota: per spostare velocemente l’attuatore, premere l’altro tasto direzionale, tenendo premuto contempora-neamente il tasto direzionale selezionato per primo.
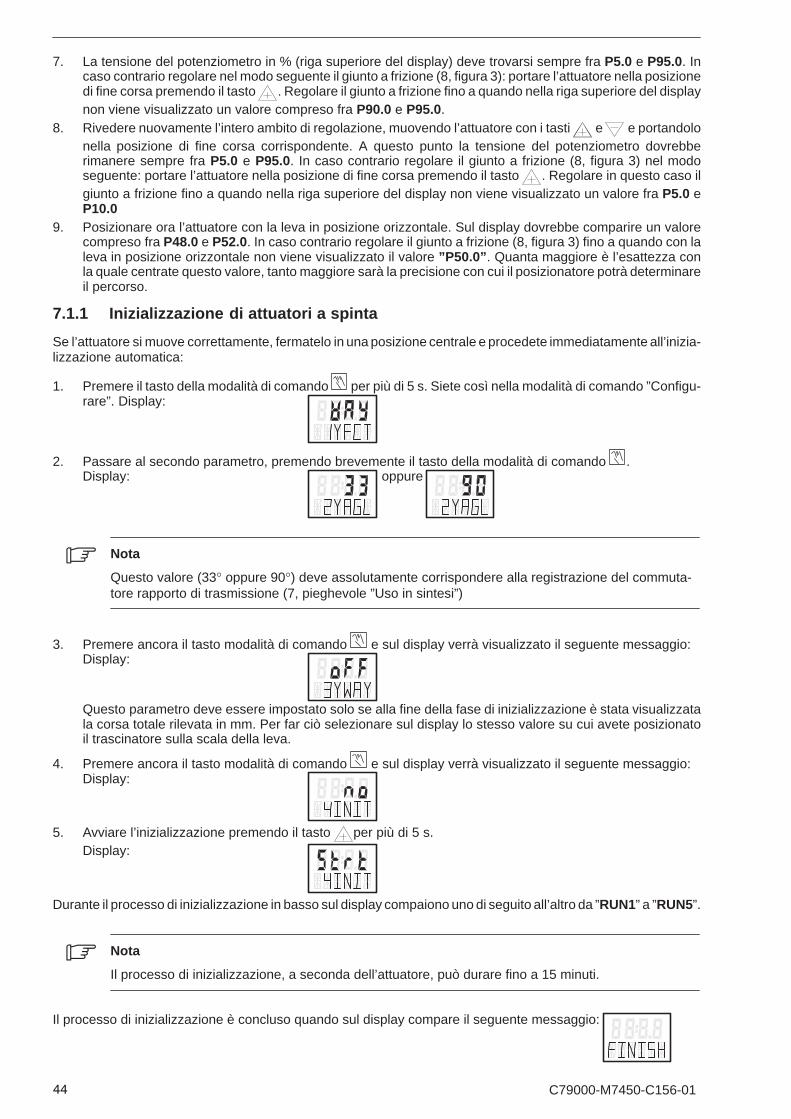
C79000-M7450-C156-01
7. La tensione del potenziometro in % (riga superiore del display) deve trovarsi sempre fra P5.0 e P95.0. Incaso contrario regolare nel modo seguente il giunto a frizione (8, figura 3): portare l’attuatore nella posizionedi fine corsa premendo il tasto . Regolare il giunto a frizione fino a quando nella riga superiore del displaynon viene visualizzato un valore compreso fra P90.0 e P95.0.
8. Rivedere nuovamente l’intero ambito di regolazione, muovendo l’attuatore con i tasti e e portandolonella posizione di fine corsa corrispondente. A questo punto la tensione del potenziometro dovrebberimanere sempre fra P5.0 e P95.0. In caso contrario regolare il giunto a frizione (8, figura 3) nel modoseguente: portare l’attuatore nella posizione di fine corsa premendo il tasto . Regolare in questo caso ilgiunto a frizione fino a quando nella riga superiore del display non viene visualizzato un valore fra P5.0 eP10.0
9. Posizionare ora l’attuatore con la leva in posizione orizzontale. Sul display dovrebbe comparire un valorecompreso fra P48.0 e P52.0. In caso contrario regolare il giunto a frizione (8, figura 3) fino a quando con laleva in posizione orizzontale non viene visualizzato il valore ”P50.0”. Quanta maggiore è l’esattezza conla quale centrate questo valore, tanto maggiore sarà la precisione con cui il posizionatore potrà determinareil percorso.
7.1.1 Inizializzazione di attuatori a spinta
Se l’attuatore si muove correttamente, fermatelo in una posizione centrale e procedete immediatamente all’inizia-lizzazione automatica:
1. Premere il tasto della modalità di comando per più di 5 s. Siete così nella modalità di comando ”Configu-rare”. Display:
2. Passare al secondo parametro, premendo brevemente il tasto della modalità di comando .Display: oppure
Nota
Questo valore (33° oppure 90°) deve assolutamente corrispondere alla registrazione del commuta-tore rapporto di trasmissione (7, pieghevole ”Uso in sintesi”)
3. Premere ancora il tasto modalità di comando e sul display verrà visualizzato il seguente messaggio:Display:
Questo parametro deve essere impostato solo se alla fine della fase di inizializzazione è stata visualizzatala corsa totale rilevata in mm. Per far ciò selezionare sul display lo stesso valore su cui avete posizionatoil trascinatore sulla scala della leva.
4. Premere ancora il tasto modalità di comando e sul display verrà visualizzato il seguente messaggio:Display:
5. Avviare l’inizializzazione premendo il tasto per più di 5 s.Display:
Durante il processo di inizializzazione in basso sul display compaiono uno di seguito all’altro da ”RUN1” a ”RUN5”.
Nota
Il processo di inizializzazione, a seconda dell’attuatore, può durare fino a 15 minuti.
Il processo di inizializzazione è concluso quando sul display compare il seguente messaggio:

C79000-M7450-C156-01
Premendo brevemente il tasto modalità di comando sul display compare il seguente messaggio:
Per uscire dalla modalità di comando Configurare premere il tasto di comando per più di 5 s. Dopo circa 5s viene visualizzata la versione software. Dopo aver lasciato il tasto funzioni di esercizio l’apparecchiatura si trovanella modalità di funzionamento in manuale.
Per impostare altri parametri consultare il pieghevole ”Uso in sintesi” o il manuale dell’apparecchiatura.
Un’inizializzazione successiva può essere avviata in qualsiasi momento sia nella modalità di funzionamento inmanuale che in automatico.
7.2 Preparativi per attuatori a rotazione
Nota
Particolarmente importante: nel posizionatore portate il commutatore rapporto di trasmissione (7, pieghevole ”Uso in sintesi”) nella posizione 90° (angolo di regolazione usuale per attuatori a ro-tazione).
1. Montare il posizionatore con la serie di montaggio corrispondente (vedere capitolo 3.3)2. Collegare attuatore e posizionatore con le tubazioni pneumatiche e alimentare il posizionatore con energia
ausiliaria pneumatica (vedere figura 16).3. Collegare una fonte di corrente o tensione adatta (vedere figure 5 et 6 oppure 9 su PROFIBUS PA).4. Il posizionatore ora si trova nella modalità di comando ”P–funzionamento in manuale”. Nella riga superiore
del display viene visualizzata la tensione attuale del potenziometro (P) in %, ad esempio ”P12.3” mentre sullariga inferiore lampeggia ”NOINIT”:
5. Verificare la corsa libera della parte meccanica nell’intero ambito di regolazione, spostando l’attuatore coni tasti e e portandolo nella posizione di fine corsa corrispondente.
6. Nota: per spostare rapidamente l’attuatore, premere l’altro tasto direzionale, tenendo premuto contempora-neamente il tasto direzionale selezionato per primo.
7. La tensione del potenziometro in % (riga superiore del display) deve trovarsi sempre fra P5.0 e P95.0. Incaso contrario regolate il giunto a frizione (8, figura 3) nel modo seguente. portate l’attuatore a fine corsapremendo il tasto . Regolate il giunto a frizione fino a quando sulla riga superiore del display non compareun valore fra P90.0 e P95.0.
8. Rivedere l’intero ambito di regolazione, spostando l’attuatore con i tasti e portandolo nel relativo finecorsa. La tensione del potenziometro deve trovarsi sempre fra P5.0 e P95.0. In caso contrario regolare ilgiunto a frizione (8, figura 3) nel modo seguente. Portare l’attuatore nella posizione di fine corsa premendoil tasto . Questa volta regolare il giunto a frizione fino a quando nella riga superiore del display non vienevisualizzato un valore compreso fra P5.0 e P10.0.
7.2.1 Inizializzazione di attuatori a rotazione
Se l’attuatore si muove correttamente, fermatelo in una posizione centrale e procedete all’inizializzazione auto-matica.
1. Premere il tasto della modalità di comando per più di 5 s. Siete così nella modalità di comando ”Configu-rare”.Display:
2. Impostare il parametro con il tasto su ”turn”Display:
3. Passare al secondo parametro, premendo brevemente il tasto modalità di comando .Quest’ultimo è impostato automaticamente su 90°.Display:

C79000-M7450-C156-01
4. Passare con il tasto modalità di comando al display successivo:Display:
5. Avviare l’inizializzazione premendo il tasto per più di 5 s.Display:
Durante il processo di inizializzazione in basso sul display compaiono uno di seguito all’altro da ”RUN1” a ”RUN5”.
Nota
Il processo di inizializzazione, a seconda dell’attuatore, può durare fino a 15 minuti.
Il processo di inizializzazione è concluso quando compare il seguente messaggio sul display:
Il valore superiore indica l’intero angolo di rotazione dell’attuatore (esempio 93,5°).
Premendo brevemente il tasto modalità di comando compare il seguente messaggio sul display:
Per uscire dalla modalità ”Configurare” premere il tasto modalità di comando per più di 5 s. Dopo circa 5 s vienevisualizzata la versione software. Lasciando il tasto modalità di comando l’apparecchiatura si trova nella modalitàdi funzionamento in manuale.
Per impostare altri parametri consultare il pieghevole ”Uso in sintesi” o il manuale dell’apparecchiatura.
Un’inizializzazione successiva può essere avviata in qualsiasi momento sia dal funzionamento in manuale chedal funzionamento in automatico.
8 Conformità
L’attuatore SIPART PS2 senza PROFIBUS PA con i relativi moduli opzionali è omologato sia per il funzionamentonella Zona 1 quale apparecchiatura EEx ib (vedi certificato di omologazione CE PTB 97 ATEX 2155) sia nella Zona2 quale apparecchiatura Ex n (vedi attestato di conformità TÜV 97 ATEX 1212).
Per l’impiego nella Zona 2 è tuttavia indispensabile il rispetto delle seguenti condizioni:
Per l’attuatore e i moduli opzionali utilizzati si devono usare delle targhette specifiche. Tali targhette vanno ordinate come set completo (contenente 5 pezzi), specificando il numero di ordinazione
C73451–A430–D55. L’impiego nella Zona 2 deve essere evidenziato sovraincollando (ovvero annullando) la targhetta standard
EEx ib con la rispettiva targhetta Ex n.
!Pericolo
Dato che durante l’impiego dell’attuatore e dei relativi moduli opzionali nella Zona 2 in caso di gua-sto si possono superare i valori massimi previsti nel funzionamento normale, in un tempo succes-sivo è assolutamente vietato rimettere in servizio l’apparecchiatura e i relativi moduli opzionali nellaZona 1.
E’ disponibile anche la certificazione FMRC (Factory Mutual Research Corporation) N. 6DA0.AX.
C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
rau
nsc
hw
eig
un
d B
erlin
(1)
Att
esta
to d
i esa
me
CE
del
tip
o
(Tra
duzi
one)
(2)
App
arec
chi e
sis
tem
i di p
rote
zion
e de
stin
ati a
d es
sere
util
izza
ti in
atm
osfe
ra p
oten
zial
men
te e
splo
siva
–
dir
etti
va 9
4/9/
CE
(3)
Num
ero
dell’
atte
stat
o di
esa
me
CE
del
tipo
:
P
TB
97
AT
EX
215
5
(4)
App
arec
chio
:P
osiz
iona
tore
SIP
AR
T P
S T
ipo
6DR
400*
–*E
con
mod
uli o
pzio
nali
(5)
Fab
bric
ante
:S
iem
ens
AG
, Aut
omat
isie
rung
stec
hnik
(6)
Indi
rizzo
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
(7)
Il tip
o di
que
sto
appa
recc
hio
e le
var
ie e
secu
zion
i am
mes
se s
ono
spec
ifica
ti ne
ll’al
lega
to a
l pre
sent
e at
test
ato
di e
sam
ede
l tip
o.
(8)
La P
hysi
kalis
ch–T
echn
isch
e B
unde
sans
talt,
in q
ualit
à di
org
anis
mo
n. 0
102
notif
icat
o di
cui
all’
artic
olo
9 de
lla d
iretti
vade
l Con
sigl
io d
elle
Com
unità
eur
opee
del
23
mar
zo 1
994
(94/
9/C
E),
cer
tific
a la
sod
disf
azio
ne d
ei re
quis
iti e
ssen
zial
iin
mat
eria
di s
icur
ezza
e d
i sal
ute
per l
a pr
oget
tazi
one
e la
cos
truz
ione
di a
ppar
ecch
i e s
iste
mi d
i pro
tezi
one
dest
inat
iad
ess
ere
utili
zzat
i in
atm
osfe
ra p
oten
zial
men
te e
splo
siva
di c
ui a
ll’al
lega
to II
del
la d
iretti
va.
I ris
ulta
ti de
ll’es
ame
sono
ripo
rtat
i nel
rapp
orto
con
fiden
zial
e su
lle p
rove
effe
ttuat
e n.
PT
B E
x 97
-271
96.
(9)
I req
uisi
ti es
senz
iali
in m
ater
ia d
i sic
urez
za e
di s
alut
e so
no s
oddi
sfat
ti in
virt
ù de
lla c
onfo
rmità
alle
nor
me
DIN
EN
500
14:1
994-
03D
IN E
N 5
0020
:199
6-04
(10)
Qua
lora
il n
umer
o de
ll’at
test
ato
sia
segu
ito d
al c
arat
tere
”X
”, s
i ric
hiam
a l’a
ttenz
ione
su
cond
izio
ni p
artic
olar
i per
l’util
izza
zion
e si
cura
del
l’app
arec
chio
nel
l’alle
gato
al p
rese
nte
atte
stat
o.
(11)
Il pr
esen
te a
ttest
ato
di e
sam
e C
E d
el ti
po s
i rife
risce
esc
lusi
vam
ente
alla
pro
getta
zion
e e
alla
cos
truz
ione
del
l’app
arec
-ch
io s
peci
ficat
o ai
sen
si d
ella
dire
ttiva
94/
9/C
E. A
ltri r
equi
siti
di ta
le d
iretti
va v
anno
app
licat
i per
la fa
bbric
azio
ne e
l’im
-m
issi
one
sul m
erca
to d
el s
umm
enzi
onat
o ap
pare
cchi
o.
(12)
La m
arca
tura
del
l’app
arec
chio
dev
e co
mpr
ende
re le
seg
uent
i ind
icaz
ioni
:
II 2
G
EE
x ib
IIC
T6
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
19.
08.1
997
im A
uftr
ag
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
Pag
ina
1/4
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
(13)
Alle
gat
o
(14)
Att
esta
to d
i esa
me
CE
del
tip
o P
TB
97
AT
EX
215
5(1
5)D
escr
izio
ne d
ell’a
ppar
ecch
io
Il po
sizi
onat
ore
SIP
AR
T P
S T
ipo
6DR
400*
–*E
fung
e da
mod
ulo
di a
ccop
piam
ento
tra
rego
lato
ri o
orga
ni d
i com
ando
elet
tric
i e a
ttuat
ori p
neum
atic
i.
I ca
mpi
di t
empe
ratu
ra a
mbi
ente
am
mis
sibi
li in
fun
zion
e de
lla c
lass
e di
tem
pera
tura
son
o rip
orta
ti ne
lla s
egue
nte
tabe
lla:
Cla
sse
di te
mpe
ratu
raC
ampo
di t
empe
ratu
ra a
mbi
ente
T6
–30
°C a
+50
°C
T5
–30
°C a
+65
°C
T4
–30
°C a
+80
°C
Dat
i ele
ttric
i
Ap
par
ecch
io b
ase
Col
lega
men
to a
2 fi
li
Circ
uiti
di a
limen
tazi
one
e di
com
ando
col
lega
ti in
ser
ie,
4...2
0 m
A(m
orse
tti 3
e 7
/8;
pont
icel
li su
i mor
setti
1–2
e4/
5–6)
in e
secu
zion
e a
sicu
rezz
a in
trin
seca
EE
x ib
IIC
sol
o pe
r il
colle
gam
ento
aci
rcui
ti ce
rtifi
cati
a si
cure
zza
intr
inse
ca c
on i
segu
enti
valo
ri m
assi
mi:
Ui
=
30 V
I i=
100
mA
Pi
=
1 W
capa
cità
inte
rna
effic
ace
Ci =
12,
1 nF
indu
ttanz
a in
tern
a ef
ficac
eL i
= 0
,22
mH
Col
lega
men
to a
3/4
fili
Circ
uiti
di a
limen
tazi
one
e di
com
ando
sep
arat
iga
lvan
icam
ente
o c
on b
ase
com
une
(mor
setti
4/5
=7/
8)Te
nsio
ne d
i alim
enta
zion
e18
...30
V (
mor
setti
3 e
4/5
)C
orre
nte
di c
oman
do 4
...20
mA
(mor
setti
6 e
7/8
)
in e
secu
zion
e a
sicu
rezz
a in
trin
seca
EE
x ib
IIC
sol
o pe
r il
colle
gam
ento
a ci
rcui
ti ce
rtifi
cati
a si
cure
zza
intr
inse
ca c
on i
segu
enti
valo
ri m
assi
mi:
Ui
=
30 V
I i=
100
mA
Pi
=
1 W
capa
cità
inte
rna
effic
ace
Ci =
19
nFin
dutta
nza
inte
rna
effic
ace
L i =
0,1
1 m
H(p
er c
ircui
to)
Pag
ina
2/4

C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
Circ
uito
ingr
esso
dig
itale
(mor
setti
9 e
10)
cort
ocirc
uita
to c
on p
ontic
ello
o c
olle
gato
a u
n co
ntat
todi
com
mut
azio
ne
Mo
du
li o
pzi
on
ali
Mod
ulo
HA
RT
Tip
o 6D
R40
04–6
Hin
serit
o ne
l circ
uito
di c
oman
do (
mor
setti
6 e
7/8
)
Mod
ulo
di a
llarm
e Ti
po 6
DR
4004
–6A
Circ
uiti
usci
te d
igita
li(m
orse
tti 5
1 e
52,
o 41
e 4
2,o
31 e
32)
in e
secu
zion
e a
sicu
rezz
a in
trin
seca
EE
x ib
IIC
sol
ope
r il
colle
gam
ento
a c
ircui
ti ce
rtifi
cati
a si
cure
zza
intr
inse
ca c
on il
seg
uent
e va
lore
mas
sim
o:U
i=
30
Vca
paci
tà in
tern
a ef
ficac
eC
i = 5
,2 n
FL’
indu
ttanz
a in
tern
a ef
ficac
e è
tras
cura
bile
(per
circ
uito
)
Circ
uito
ingr
esso
dig
itale
(mor
setti
11
e 12
)in
ese
cuzi
one
a si
cure
zza
intr
inse
ca E
Ex
ib II
C s
olo
per
il co
llega
men
to a
circ
uiti
cert
ifica
ti a
sicu
rezz
ain
trin
seca
con
il s
egue
nte
valo
re m
assi
mo:
Ui
=
30 V
La c
apac
ità in
tern
a ef
ficac
e è
tras
cura
bile
.L’
indu
ttanz
a in
tern
a ef
ficac
e è
tras
cura
bile
.
Circ
uito
ingr
esso
dig
itale
(mor
setti
21
e 22
)co
rtoc
ircui
tato
con
pon
ticel
lo o
col
lega
to a
un
cont
atto
di c
omm
utaz
ione
Mod
ulo
Iy T
ipo
6DR
4004
–6J
Circ
uito
di u
scita
, 4...
20 m
A(m
orse
tti 6
1 e
62)
in e
secu
zion
e a
sicu
rezz
a in
trin
seca
EE
x ib
IIC
solo
per
il co
llega
men
to a
circ
uiti
cert
ifica
ti a
sicu
rezz
ain
trin
seca
con
i se
guen
ti va
lori
mas
sim
i:U
i=
30
VI i
= 1
00 m
AP
i=
1
Wca
paci
tà in
tern
a ef
ficac
eC
i = 1
1 nF
indu
ttanz
a in
tern
a ef
ficac
eL i
= 0
,22
mH
(16)
Rap
port
o su
lle p
rove
effe
ttuat
e n.
PT
B E
x 97
-271
96
Pag
ina
3/4
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
t
Bra
unsc
hwei
g u
nd B
erlin
(17)
ondi
zion
i par
ticol
ari
ines
iste
nti
(18)
Req
uisi
ti es
senz
iali
in m
ater
ia d
i sic
urez
za e
di s
alut
e
sodd
isfa
tti in
con
form
ità a
lle n
orm
e vi
gent
i
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
19.
08.1
997
Im A
uftr
ag
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
Pag
ina
4/4
C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
1. C
om
ple
men
to
di c
ui a
lla d
iret
tiva
94/
9/C
E a
lleg
ato
III p
arag
rafo
6
di c
ui a
lla d
iret
tiva
del
l’att
esta
to d
i esa
me
CE
del
tip
o P
TB
97
AT
EX
215
5
App
arec
chio
:P
osiz
iona
tore
SIP
AR
T P
S T
ipo
6DR
400*
–*E
con
mod
uli o
pzio
nali
Dem
ande
ur:
Sie
men
s A
G
per l
’add
ietr
o:S
iem
ens
AG
, Aut
omat
isie
rung
stec
hnik
Indi
rizzo
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
Des
criz
ione
dei
com
plem
enti
e de
lle m
odifi
che
Il po
sizi
onat
ore
SIP
AR
T P
S T
ipo
6DR
400*
–*E
con
mod
uli o
pzio
nali
in fu
turo
pot
rà e
sser
e fa
bbric
ato
in c
onfo
rmità
alla
docu
men
tazi
one
tecn
ica
spec
ifica
ta n
el r
appo
rto
sulle
pro
ve e
ffettu
ate.
Le
mod
ifich
e ap
port
ate
inte
ress
ano
la s
trut
tura
inte
rna
e la
des
igna
zion
e de
l tip
o di
app
arec
chio
, ch
e in
fut
uro
sarà
la
segu
ente
: po
sizi
onat
ore
SIP
AR
T P
S2
Tipo
6DR
400*
–*E
con
mod
uli o
pzio
nali.
I da
ti el
ettr
ici e
tutti
i re
stan
ti da
ti rim
arra
nno
inva
riati.
Rap
port
o su
lle p
rove
effe
ttuat
e n.
PT
B E
x 97
-273
51
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
05.
01.1
998
Im A
uftr
ag
Dr.-
Ing.
U. J
ohan
nsm
eyer
Reg
ieru
ngsd
irekt
or
Pag
ina
1/1
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
rau
nsc
hw
eig
un
d B
erlin
2. C
om
ple
men
to
di
cui a
lla d
iret
tiva
94/
9/C
E a
lleg
ato
III p
arag
rafo
6
del
l’att
esta
to d
i esa
me
CE
del
tip
o P
TB
97
AT
EX
215
5
App
arec
chio
:P
osiz
iona
tore
SIP
AR
T P
S T
ipo
6DR
400*
–*E
Sig
la:
II 2
G E
Ex
ib II
C T
6 o
pp
ure
EE
x ia
IIC
T6
Fab
bric
ante
:S
iem
ens
AG
, Aut
omat
isie
rung
stec
hnik
Indi
rizzo
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
Des
criz
ione
dei
com
plem
enti
e de
lle m
odifi
che
Il po
sizi
onat
ore
SIP
AR
T P
S ti
po 6
DR
400*
–*E
vie
ne c
ompl
etat
o co
n il
tipo
6DR
410*
–*E
e in
futu
ro p
otrà
ess
ere
prod
otto
anch
e in
bas
e al
la d
ocum
enta
zion
e el
enca
ta n
el s
egue
nte
rapp
orto
di p
rova
.
Que
ste
mod
ifich
e in
tere
ssan
o la
cos
truz
ione
inte
rna,
i ”da
ti el
ettr
ici”
e il
tipo
di p
rote
zion
e an
tidef
lagr
ante
del
l’app
arec
chia
-tu
ra. Q
uest
’ulti
ma
per
la v
ersi
one
mod
ifica
ta è
11
2 G
Eex
la II
C T
6.
Dat
i ele
ttric
i
Ap
par
ecch
iatu
ra b
ase
Circ
uito
ene
rgia
aus
iliar
ia/c
orre
nte
segn
ale
di u
scita
P
RO
FIB
US
–PA
(m
orse
tti 7
e 3
)in
ese
cuzi
one
a si
cure
zza
intr
inse
ca E
Ex
ia II
C
oppu
re E
Ex
ib II
C,
da c
olle
gare
sol
amen
te a
un
circ
uito
di c
orre
nte
cert
ifica
to a
sic
urez
za in
trin
seca
(ad
esem
pio
alim
enta
tore
FIS
CO
) con
i va
lori
mas
sim
i cor
rispo
nden
tia
quel
li rip
orta
ti ne
lla s
egue
nte
tabe
lla:
Alim
enta
tore
FIS
CO
EE
x ib
IIC
Alim
enta
tore
FIS
CO
EE
x ib
IIB
Alim
enta
tore
FIS
CO
EE
x ia
IIC
Bar
riera
EE
x ia
IIC
oppu
re E
Ex
ib II
C
Cur
va c
arat
teris
tica
retta
ngol
are
retta
ngol
are
Tens
ion
17,5
V17
,5 V
17,5
V24
V
Cou
rant
128
mA
280
mA
215
mA
200
mA
Pui
ssan
ce1,
8 W
4,2
W1,
8 W
1,2
W
L i =
8
H
Ci
tra
scur
abilm
ente
pic
colo
Pag
ina
1/3

C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
t
Bra
un
sch
wei
g u
nd
Ber
lin
2. C
om
ple
men
to d
ell’a
ttes
tato
di e
sam
e C
E d
el t
ipo
PT
B 9
7 A
TE
X
Mo
du
li o
pzi
on
ali
Mod
ulo
di a
llarm
e Ti
po 6
DR
4004
–6A
Circ
uiti
usci
te d
igita
li(m
orse
tti 5
1 e
52,
o 41
e 4
2,o
31 e
32)
in e
secu
zion
e a
sicu
rezz
a in
trin
seca
EE
x ib
IIC
sol
o pe
r il
colle
gam
ento
a c
ircui
ti ce
rtifi
cati
a si
cure
zza
intr
inse
ca .
Val
ori m
assi
mi p
er c
ircui
to:
Ui
=
30 V
Ci
= 5
,2 n
FL i
tr
ascu
rabi
le.
Circ
uito
ingr
esso
dig
itale
(mor
setti
11
e 12
)in
ese
cuzi
one
a si
cure
zza
intr
inse
ca E
Ex
ib II
C s
olo
per
ilco
llega
men
to a
circ
uiti
cert
ifica
ti a
sicu
rezz
a in
trin
seca
.V
alor
i mas
sim
i:U
i=
30
VC
i tra
scur
abile
L i tr
ascu
rabi
le
Circ
uito
ingr
esso
dig
itale
(mor
setti
21
e 22
)co
rtoc
ircui
tato
con
pon
ticel
lo o
col
lega
to a
un
cont
atto
di
com
mut
azio
ne
Mod
ulo
Iy T
ipo
6DR
4004
–6J
Circ
uito
di u
scita
, 4...
20 m
A(m
orse
tti 6
1 e
62)
in e
secu
zion
e a
sicu
rezz
a in
trin
seca
EE
x ib
IIC
solo
per
ilco
llega
men
to a
circ
uiti
cert
ifica
ti a
sicu
rezz
a in
trin
seca
.V
alor
i mas
sim
i:U
i=
30
VI i
= 1
00 m
AP
i=
1 W
Ci
= 1
1 nF
L i
= 0
,22
mH
I circ
uiti
di c
orre
nte
dell’
usci
ta b
inar
ia (m
odul
o di
alla
rme)
son
o se
para
ti in
mod
o ga
lvan
icam
ente
sic
uro
fra
di lo
ro e
da
tutti
gli a
ltri c
ircui
ti di
cor
rent
e fin
o a
un v
alor
e m
assi
mo
della
tens
ione
nom
inal
e pa
ri a
30 V
. Il c
ircui
to d
ella
cor
rent
e di
usc
ita(m
odul
o ly
) e il
circ
uito
di c
orre
nte
dell’
entr
ata
bina
ria s
ono
sepa
rati
in m
odo
galv
anic
amen
te s
icur
o da
tutti
gli
altr
i circ
uiti
di c
orre
nte
fino
ad u
na te
nsio
ne n
omin
ale
di 3
0 V
.
Tutti
gli
altr
i dat
i rim
ango
no in
varia
ti.
Rap
port
o P
TB
EX
98-
2836
5
Pag
ina
2/3
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
2. C
om
ple
men
to d
ell’a
ttes
tato
di e
sam
e C
E d
el t
ipo
PT
B 9
7 A
TE
X
Con
dizi
oni p
artic
olar
i
ines
iste
nti
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
29.
Okt
ober
199
8
Im A
uftr
ag
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
Pag
ina
3/3
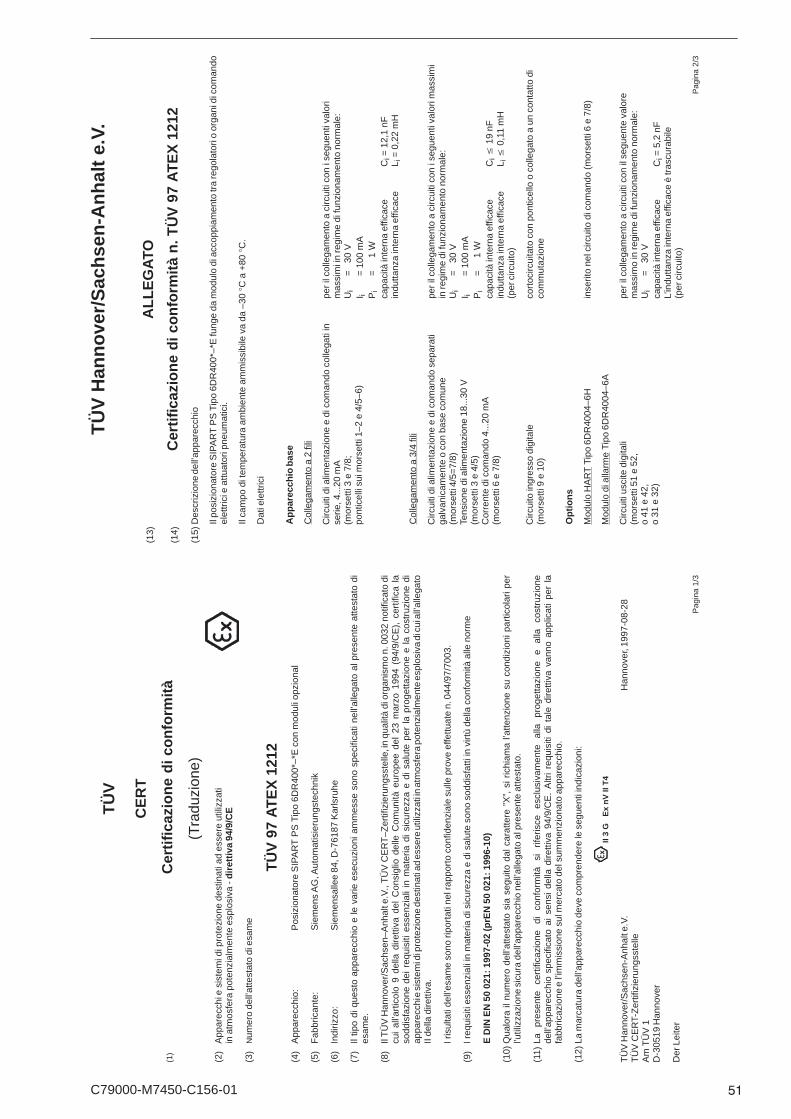
C79000-M7450-C156-01
TÜ
V
CE
RT
(1)
Cer
tifi
cazi
on
e d
i co
nfo
rmit
à
(Tra
duzi
one)
(2)
App
arec
chi e
sis
tem
i di p
rote
zion
e de
stin
ati a
d es
sere
util
izza
ti in
atm
osfe
ra p
oten
zial
men
te e
splo
siva
- d
iret
tiva
94/
9/C
E
(3)
Num
ero
dell’
atte
stat
o di
esa
me
T
ÜV
97
AT
EX
121
2(4
)A
ppar
ecch
io:
Pos
izio
nato
re S
IPA
RT
PS
Tip
o 6D
R40
0*–*
E c
on m
odul
i opz
iona
l
(5)
Fab
bric
ante
:S
iem
ens
AG
, Aut
omat
isie
rung
stec
hnik
(6)
Indi
rizzo
:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
(7)
Il tip
o di
que
sto
appa
recc
hio
e le
var
ie e
secu
zion
i am
mes
se s
ono
spec
ifica
ti ne
ll’al
lega
to a
l pre
sent
e at
test
ato
dies
ame.
(8)
Il T
ÜV
Han
nove
r/S
achs
en–A
nhal
t e.V
., T
ÜV
CE
RT
–Zer
tifiz
ieru
ngss
telle
, in
qual
ità d
i org
anis
mo
n. 0
032
notif
icat
o di
cui
all’a
rtic
olo
9 de
lla d
iretti
va d
el C
onsi
glio
del
le C
omun
ità e
urop
ee d
el 2
3 m
arzo
199
4 (9
4/9/
CE
), c
ertif
ica
laso
ddis
fazi
one
dei
requ
isiti
ess
enzi
ali
in m
ater
ia d
i si
cure
zza
e di
sal
ute
per
la p
roge
ttazi
one
e la
cos
truz
ione
di
appa
recc
hi e
sis
tem
i di p
rote
zion
e de
stin
ati a
d es
sere
util
izza
ti in
atm
osfe
ra p
oten
zial
men
te e
splo
siva
di c
ui a
ll’al
lega
toII
della
dire
ttiva
.
I ris
ulta
ti de
ll’es
ame
sono
ripo
rtat
i nel
rapp
orto
con
fiden
zial
e su
lle p
rove
effe
ttuat
e n.
044
/97/
7003
.
(9)
I req
uisi
ti es
senz
iali
in m
ater
ia d
i sic
urez
za e
di s
alut
e so
no s
oddi
sfat
ti in
virt
ù de
lla c
onfo
rmità
alle
nor
me
E D
IN E
N 5
0 02
1: 1
997-
02 (p
rEN
50
021:
199
6-10
)
(10)
Qua
lora
il n
umer
o de
ll’at
test
ato
sia
segu
ito d
al c
arat
tere
”X
”, s
i ric
hiam
a l’a
ttenz
ione
su
cond
izio
ni p
artic
olar
i per
l’util
izza
zion
e si
cura
del
l’app
arec
chio
nel
l’alle
gato
al p
rese
nte
atte
stat
o.
(11)
La
pres
ente
ce
rtifi
cazi
one
di
conf
orm
ità
si
rifer
isce
es
clus
ivam
ente
al
la
prog
etta
zion
e e
alla
co
stru
zion
ede
ll’ap
pare
cchi
o sp
ecifi
cato
ai
sens
i de
lla d
iretti
va 9
4/9/
CE
. A
ltri
requ
isiti
di
tale
dire
ttiva
van
no a
pplic
ati
per
lafa
bbric
azio
ne e
l’im
mis
sion
e su
l mer
cato
del
sum
men
zion
ato
appa
recc
hio.
(12)
La m
arca
tura
del
l’app
arec
chio
dev
e co
mpr
ende
re le
seg
uent
i ind
icaz
ioni
:
II 3
G
Ex
nV
II T
4
TÜ
V H
anno
ver/
Sac
hsen
-Anh
alt e
.V.
Han
nove
r, 19
97-0
8-28
TÜ
V C
ER
T-Z
ertif
izie
rung
sste
lleA
m T
ÜV
1D
-305
19 H
anno
ver
Der
Lei
ter
Pag
ina
1/3
TÜ
V H
ann
ove
r/S
ach
sen
-An
hal
t e.
V.
(13)
AL
LE
GA
TO
(14)
Cer
tifi
cazi
on
e d
i co
nfo
rmit
à n
. TÜ
V 9
7 A
TE
X 1
212
(15)
Des
criz
ione
del
l’app
arec
chio
Il po
sizi
onat
ore
SIP
AR
T P
S T
ipo
6DR
400*
–*E
fung
e da
mod
ulo
di a
ccop
piam
ento
tra
rego
lato
ri o
orga
ni d
i com
ando
elet
tric
i e a
ttuat
ori p
neum
atic
i.
Il ca
mpo
di t
empe
ratu
ra a
mbi
ente
am
mis
sibi
le v
a da
–30
°C a
+80
°C
.
Dat
i ele
ttric
i
Ap
par
ecch
io b
ase
Col
lega
men
to a
2 fi
li
Circ
uiti
di a
limen
tazi
one
e di
com
ando
col
lega
ti in
serie
, 4...
20 m
A(m
orse
tti 3
e 7
/8;
pont
icel
li su
i mor
setti
1–2
e 4
/5–6
)
per
il co
llega
men
to a
circ
uiti
con
i seg
uent
i val
ori
mas
sim
i in
regi
me
di fu
nzio
nam
ento
nor
mal
e:U
i=
30
VI i
= 1
00 m
AP
i=
1
Wca
paci
tà in
tern
a ef
ficac
eC
i = 1
2,1
nFin
dutta
nza
inte
rna
effic
ace
L i =
0,2
2 m
H
Col
lega
men
to a
3/4
fili
Circ
uiti
di a
limen
tazi
one
e di
com
ando
sep
arat
iga
lvan
icam
ente
o c
on b
ase
com
une
(mor
setti
4/5
=7/
8)Te
nsio
ne d
i alim
enta
zion
e 18
...30
V(m
orse
tti 3
e 4
/5)
Cor
rent
e di
com
ando
4...
20 m
A(m
orse
tti 6
e 7
/8)
per
il co
llega
men
to a
circ
uiti
con
i seg
uent
i val
ori m
assi
mi
in re
gim
e di
funz
iona
men
to n
orm
ale:
Ui
=
30 V
I i=
100
mA
Pi
=
1 W
capa
cità
inte
rna
effic
ace
Ci
19
nFin
dutta
nza
inte
rna
effic
ace
L i
0,1
1 m
H(p
er c
ircui
to)
Circ
uito
ingr
esso
dig
itale
(mor
setti
9 e
10)
cort
ocirc
uita
to c
on p
ontic
ello
o c
olle
gato
a u
n co
ntat
to d
ico
mm
utaz
ione
Op
tio
ns
Mod
ulo
HA
RT
Tip
o 6D
R40
04–6
Hin
serit
o ne
l circ
uito
di c
oman
do (
mor
setti
6 e
7/8
)
Mod
ulo
di a
llarm
e Ti
po 6
DR
4004
–6A
Circ
uiti
usci
te d
igita
li(m
orse
tti 5
1 e
52,
o 41
e 4
2,o
31 e
32)
per
il co
llega
men
to a
circ
uiti
con
il se
guen
te v
alor
em
assi
mo
in re
gim
e di
funz
iona
men
to n
orm
ale:
Ui
=
30 V
capa
cità
inte
rna
effic
ace
Ci =
5,2
nF
L’in
dutta
nza
inte
rna
effic
ace
è tr
ascu
rabi
le(p
er c
ircui
to)
Pag
ina
2/3
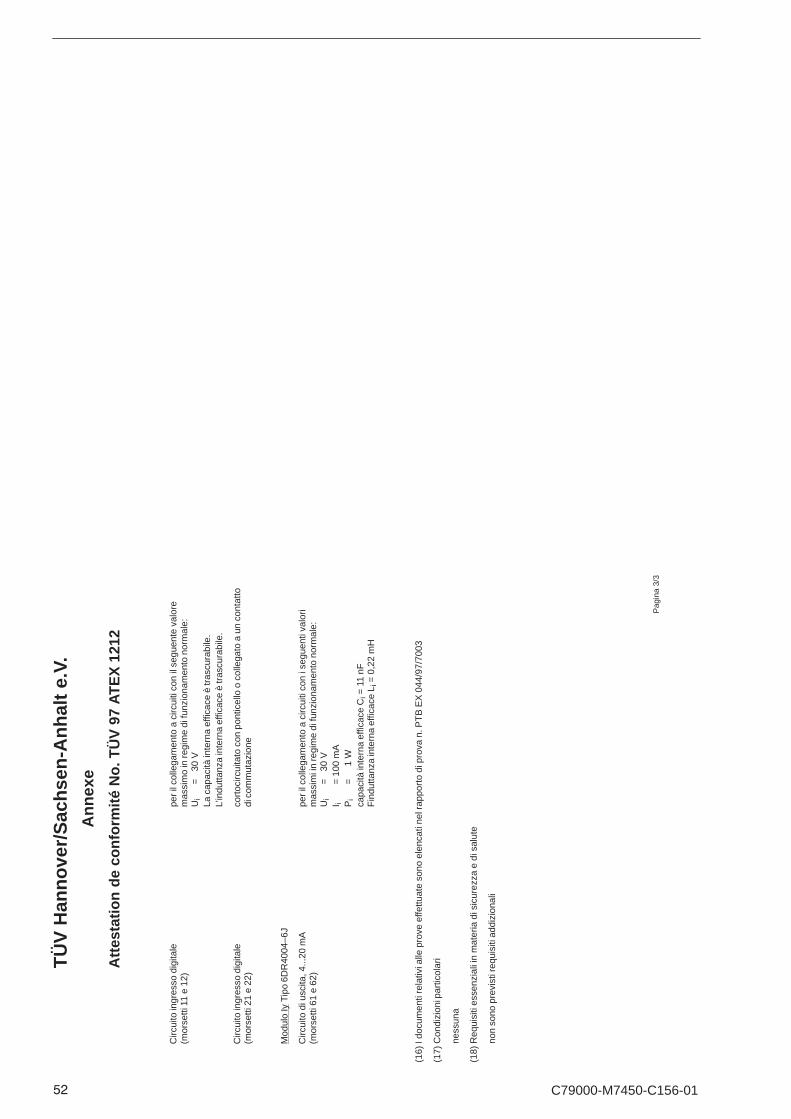
C79000-M7450-C156-01
TÜ
V H
ann
ove
r/S
ach
sen
-An
hal
t e.
V.A
nn
exe
Att
esta
tio
n d
e co
nfo
rmit
é N
o. T
ÜV
97
AT
EX
121
2
Circ
uito
ingr
esso
dig
itale
(mor
setti
11
e 12
)pe
r il
colle
gam
ento
a c
ircui
ti co
n il
segu
ente
val
ore
mas
sim
o in
regi
me
di fu
nzio
nam
ento
nor
mal
e:U
i=
30
VLa
cap
acità
inte
rna
effic
ace
è tr
ascu
rabi
le.
L’in
dutta
nza
inte
rna
effic
ace
è tr
ascu
rabi
le.
Circ
uito
ingr
esso
dig
itale
(mor
setti
21
e 22
)co
rtoc
ircui
tato
con
pon
ticel
lo o
col
lega
to a
un
cont
atto
di c
omm
utaz
ione
Mod
ulo
Iy T
ipo
6DR
4004
–6J
Circ
uito
di u
scita
, 4...
20 m
A(m
orse
tti 6
1 e
62)
per
il co
llega
men
to a
circ
uiti
con
i seg
uent
i val
ori
mas
sim
i in
regi
me
di fu
nzio
nam
ento
nor
mal
e:U
i=
30
VI i
= 1
00 m
AP
i=
1
Wca
paci
tà in
tern
a ef
ficac
e C
i = 1
1 nF
Fin
dutta
nza
inte
rna
effic
ace
L i =
0,2
2 m
H
(16)
I doc
umen
ti re
lativ
i alle
pro
ve e
ffettu
ate
sono
ele
ncat
i nel
rapp
orto
di p
rova
n. P
TB
EX
044
/97/
7003
(17)
Con
dizi
oni p
artic
olar
i
ness
una
(18)
Req
uisi
ti es
senz
iali
in m
ater
ia d
i sic
urez
za e
di s
alut
e
non
sono
pre
vist
i req
uisi
ti ad
dizi
onal
i
Pag
ina
3/3

C79000-M7450-C156-01
Dic
hia
razi
on
e C
E d
i co
nfo
rmit
à
n. P
S2–
Ex1
(Tra
duzi
one)
Fab
bric
ante
:S
iem
ens
Akt
ieng
esel
lsch
aft
Ber
eich
Aut
omat
isie
rung
stec
hnik
Ges
chäf
tsge
biet
Meß
-und
Prü
ftech
nik,
Pro
zeß
auto
mat
isie
rung
Indi
rizzo
:S
iem
ensa
llee
84D
-761
87 K
arls
ruhe
Bun
desr
epub
lik D
euts
chla
nd
Des
igna
zion
e de
l pro
dotto
:P
osiz
iona
tore
el.–
pneu
m. S
IPA
RT
PS
2,6D
R40
0*–*
E c
on i
mod
uli:
Mod
ulo
HA
RT
6DR
4004
-6H
Mod
ulo
di a
llarm
e6D
R40
04-6
AM
odul
o Iy
6DR
4004
-6J
Il p
rod
ott
o s
op
ra d
esig
nat
o è
co
nfo
rme
alle
dis
po
sizi
on
i del
le s
egu
enti
dir
etti
ve e
uro
pee
:
94/9
/CE
Dire
ttiva
del
Par
lam
ento
eur
opeo
e d
el C
onsi
glio
con
cern
ente
il
ravv
icin
amen
to d
elle
leg
isla
zion
i de
gli
Sta
tim
embr
i rel
ativ
e ag
li ap
pare
cchi
e s
iste
mi d
i pro
tezi
one
dest
inat
i a e
sser
e ut
ilizz
ati i
n at
mos
fera
pot
enzi
alm
ente
espl
osiv
a 94
/9/E
WG
Ult
erio
ri in
dic
azio
ni i
n m
erit
o a
ll’o
sser
van
za d
i tal
e d
iret
tiva
so
no
rip
ort
ate
nel
l’alle
gat
o E
x.
App
osiz
ione
del
la m
arca
tura
CE
: 8/1
997
Sie
men
s A
ktie
nges
ells
chaf
t
Kar
lsru
he, l
e 9.
9.97
L’al
lega
to E
x co
stitu
isce
par
te in
tegr
ante
del
la p
rese
nte
dich
iara
zion
e.La
pre
sent
e di
chia
razi
one
cert
ifica
la c
onfo
rmità
alle
dire
ttive
men
zion
ate
ma
non
cost
ituis
ce p
rom
essa
di d
eter
min
ate
qual
ità a
i sen
si d
ella
legg
e su
lla r
espo
nsab
ilità
civ
ile d
a pr
odot
ti di
fetto
si.
Van
no in
ogn
i cas
o os
serv
ate
le a
vver
tenz
e re
lativ
e al
la s
icur
ezza
rip
orta
te n
ella
doc
umen
tazi
one
in d
otaz
ione
al p
rodo
tto.
Alle
gat
o E
xD
ich
iara
zio
ne
CE
di c
on
form
ità
n. P
S2–
Ex1
Des
igna
zion
e de
l pro
dotto
:P
osiz
iona
tore
el.–
pneu
m. S
IPA
RT
PS
2 6D
R40
0*–*
E c
on i
mod
uli:
Mod
ulo
HA
RT
6DR
4004
-6H
Mod
ulo
di a
llarm
e6D
R40
04-6
AM
odul
o Iy
6DR
4004
-6J
La c
onfo
rmità
del
pro
dotto
sop
ra d
esig
nato
alle
dis
posi
zion
i del
la d
iretti
va 9
4/9/
CE
è c
ompr
ovat
a da
ll’os
serv
anza
del
lese
guen
ti no
rme
euro
pee
arm
oniz
zate
:
Nor
me
euro
pee
arm
oniz
zate
:
Num
ero
di ri
ferim
ento
Dat
a di
em
issi
one
Num
ero
di ri
ferim
ento
Dat
a di
em
issi
one
DIN
EN
500
14D
IN E
N 5
0020
03/1
994
04/1
996
E D
IN E
N 5
0021
prE
N 5
0021
02/1
997
10/1
996
Atte
stat
o di
esa
me
CE
del
tipo
n.:
Rap
port
o di
pro
va n
.:
PT
B 9
7 A
TE
X 2
155
(E
xib)
PT
B E
x 97
-271
96
Atte
stat
o di
esa
me
CE
del
tipo
n.:
Rap
port
o di
pro
va n
.:
TÜ
V 9
7 A
TE
X 1
212
(E
xn)
044/
97/7
003
La d
ocum
enta
zion
e te
cnic
a ve
rrà
arch
ivia
ta a
l num
ero:
C73
451-
A43
0-X
1-*-
22

C79000-M7450-C156-01
Déc
lara
tio
n C
E d
e co
nfo
rmit
é
No
. 77
5.00
–10/
98
(Tra
duct
ion)
Fab
bric
ante
:S
iem
ens
Akt
ieng
esel
lsch
aft
Ber
eich
Aut
omat
isie
rung
stec
hnik
Ges
chäf
tsge
biet
Pro
zeß
auto
mat
isie
rung
und
Inst
rum
ente
Indi
rizzo
:Ö
stlic
he R
hein
brüc
kens
tr. 5
0D
-761
87 K
arls
ruhe
Bun
desr
epub
lik D
euts
chla
nd
Des
igna
zion
e de
l pro
dotto
:P
osiz
iona
tore
el.–
pneu
m. S
IPA
RT
PS
2 6D
R40
0*-*
E c
on P
RO
FIB
US
PA
6DR
410*
-xx
con
i m
odul
i:6D
R40
04-*
JM
odul
o I y
6DR
4004
-*A
Mod
ulo
di a
llarm
e
Il p
rod
ott
o s
op
ra d
esig
nat
o è
co
nfo
rme
alle
dis
po
sizi
on
i del
le s
egu
enti
dir
etti
ve e
uro
pee
:
89/3
36/C
EE
Dire
ttiva
del
Con
sigl
io p
er l
’arm
oniz
zazi
one
delle
dis
posi
zion
i di
leg
ge d
egli
Sta
ti m
embr
i su
llaco
mpa
tibili
tà e
lettr
omag
netic
a m
odifi
cata
dal
le d
iretti
ve 9
1/26
3/C
EE
, 92/
31/C
EE
e 9
3/68
CE
E.
Ult
erio
ri in
dic
azio
ni i
n m
erit
o a
ll’o
sser
van
za d
i tal
e d
iret
tiva
so
no
rip
ort
ate
nel
l’alle
gat
o E
MW
App
osiz
ione
del
la m
arca
tura
CE
: 10/
98
Sie
men
s A
ktie
nges
ells
chaf
t
Kar
lsru
he, l
e 30
.10.
1998
L’al
lega
to E
MW
cos
titui
sce
part
e in
tegr
ante
del
la p
rese
nte
dich
iara
zion
e.La
pre
sent
e di
chia
razi
one
cert
ifica
la c
onfo
rmità
alle
dire
ttive
men
zion
ate
ma
non
cost
ituis
ce p
rom
essa
di d
eter
min
ate
qual
ità a
i sen
si d
ella
legg
e su
lla r
espo
nsab
ilità
civ
ile d
a pr
odot
ti di
fetto
si.
Van
no in
ogn
i cas
o os
serv
ate
le a
vver
tenz
e re
lativ
e al
la s
icur
ezza
rip
orta
te n
ella
doc
umen
tazi
one
in d
otaz
ione
al p
rodo
tto.
Alle
gat
o E
MW
Dic
hia
razi
on
e C
E d
i co
nfo
rmit
àn
. 77
5.00
–10/
98
Des
igna
zion
e de
l pro
dotto
:P
osiz
iona
tore
el.–
pneu
m. S
IPA
RT
PS
2 6D
R40
0*-*
E c
on P
RO
FIB
US
PA
6DR
410*
-xx
con
i mod
uli
6DR
4004
-*J
Mod
ulo
I y6D
R40
04-*
AM
odul
o di
alla
rma
La c
onfo
rmità
del
pro
dotto
sop
ra d
esig
nato
alle
dis
posi
zion
i del
la d
iretti
va 8
9/33
6/C
EE
è c
ompr
ovat
a da
ll’os
serv
anza
del
lese
guen
ti no
rme
euro
pee
arm
oniz
zate
:
Nor
me
euro
pee
arm
oniz
zate
:
Num
ero
di ri
ferim
ento
Dat
a di
em
issi
one
Num
ero
di ri
ferim
ento
Dat
a di
em
issi
one
DIN
EN
500
81 P
arte
1D
IN E
N 5
0082
Par
te 2
3/19
9319
95
La d
ocum
enta
zion
e te
cnic
a ve
rrà
arch
ivia
ta a
l num
ero:
C73
451-
A43
0-X
1-*-
22
C79000-M7450-C156-01

C79000-M7450-C156-01

C79000-M7450-C156-01

C79000-M7450-C156-01
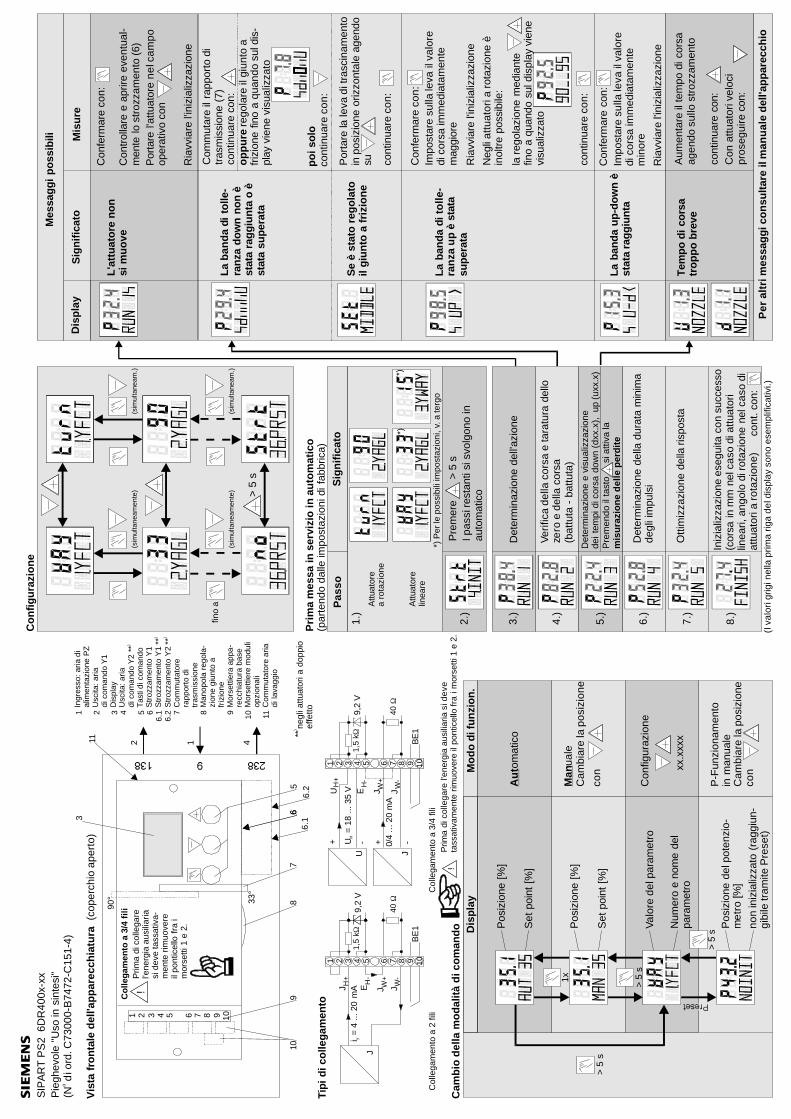
Vis
tafr
onta
led
ell'a
pp
arec
chia
tura
(cop
erch
ioap
erto
)
Pie
ghev
ole
"Uso
insi
ntes
i"(N
dio
rd.C
7300
0-B
7472
-C15
1-4)
o
SIP
AR
TP
S2
6DR
400x
-xx
negl
iattu
ator
iado
ppio
effe
tto
Ingr
esso
:aria
dial
imen
tazi
one
PZ
Usc
ita:a
riadi
com
ando
Y1
Dis
play
Usc
ita:a
riadi
com
ando
Y2
**Ta
stid
icom
ando
Stro
zzam
ento
Y1
Stro
zzam
ento
Y1
**S
trozz
amen
toY
2**
Com
mut
ator
era
ppor
todi
tras
mis
sion
eM
anop
ola
rego
la-
zion
egi
unto
afr
izio
neM
orse
ttier
aap
pa-
recc
hiat
ura
base
Mor
setti
ere
mod
uli
opzi
onal
iC
omm
utat
ore
aria
dila
vagg
io
)
) )
1 2 3 4 5 66.
16.
2 7 8 9 10 11
Cam
bio
del
lam
od
alit
àd
icom
ando
Tipi
dico
lleg
amen
to
Mes
sagg
ip
oss
ibili
Pri
ma
mes
sain
serv
izio
inau
tom
atic
o(p
arte
ndo
dalle
impo
staz
ioni
difa
bbric
a)
Col
lega
men
toa
2fil
i
J
i=
4...
20m
Ay
J H+
EH
-
J W+
W-
J
Lab
and
adi
tolle
-ra
nza
dow
nno
nè
stat
ara
gg
iun
tao
èst
ata
supe
rata
Laba
nda
dito
lle-
ran
zau
pè
stat
asu
pera
ta
Com
mut
are
ilra
ppor
todi
trasm
issi
one
(7)
cont
inua
reco
n:
Por
tare
lale
vadi
tras
cina
men
toin
posi
zion
eor
izzo
ntal
eag
endo
su Impo
star
esu
llale
vail
valo
redi
cors
aim
med
iata
men
tem
aggi
ore
Laba
nda
up-d
own
èst
ata
ragg
iunt
a
Neg
liat
tuat
oria
rota
zion
eè
inol
trepo
ssib
ile:
Col
lega
men
toa
3/4
fili
U J
0/4
...2
0m
A
U=
18...
35V
H
+ -+ -
UH
+
J W+
W-
JEH
-
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
Tem
podi
cors
atr
op
po
brev
eA
umen
tare
ilte
mpo
dico
rsa
agen
dosu
llost
rozz
amen
to
cont
inua
reco
n:
op
pu
rere
gola
reil
giun
toa
frizi
one
fino
aqu
ando
suld
is-
play
vien
evi
sual
izza
to
po
isol
oco
ntin
uare
con:
L'a
ttu
ato
ren
on
sim
uo
veC
ontro
llare
eap
rire
even
tual
-m
ente
lost
rozz
amen
to(6
)
Sig
nifi
cato
Dis
pla
yM
isur
e
Por
tare
l'attu
ator
ene
lcam
poop
erat
ivo
con
Con
ferm
are
con:
Con
ferm
are
con:
Con
ferm
are
con:
Per
altr
imes
sag
gic
on
sult
are
ilm
anu
ale
del
l'ap
par
ecch
io
cont
inua
reco
n:
cont
inua
reco
n:
Ria
vvia
rel'i
nizi
aliz
zazi
one
Ria
vvia
rel'i
nizi
aliz
zazi
one
Ria
vvia
rel'i
nizi
aliz
zazi
one
Se
èst
ato
reg
ola
toil
giu
nto
afr
izio
ne
lare
gola
zion
em
edia
nte
fino
aqu
ando
suld
ispl
ayvi
ene
visu
aliz
zato
Det
erm
inaz
ione
dell'
azio
ne
Verif
ica
della
cors
ae
tara
tura
dello
zero
ede
llaco
rsa
(bat
tuta
-ba
ttuta
)D
eter
min
azio
nee
visu
aliz
zazi
one
deit
empi
dico
rsa
dow
n(d
xx.x
),up
(uxx
.x)
Pas
soS
ign
ific
ato
Iniz
ializ
zazi
one
eseg
uita
con
succ
esso
(cor
sain
mm
nelc
aso
diat
tuat
ori
linea
ri,an
golo
diro
tazi
one
nelc
aso
diat
tuat
oria
rota
zion
e)
Otti
miz
zazi
one
della
rispo
sta
Det
erm
inaz
ione
della
dura
tam
inim
ade
glii
mpu
lsi
Attu
ator
elin
eare
Attu
ator
ea
rota
zion
e
*)
*)P
erle
poss
ibili
impo
staz
ioni
,v.a
terg
o
Pre
mer
e>
5s
Ipas
sire
stan
tisi
svol
gono
inau
tom
atic
o
(Iva
lori
grig
inel
lapr
ima
riga
deld
ispl
ayso
noes
empl
ifica
tivi.)
*)
Co
nfi
gu
razi
on
e
(sim
ulta
neam
ente
)
(sim
ulta
neam
ente
)
(sim
ulta
neam
.)
(sim
ulta
neam
.)
>5
s
fino
a
BE
1B
E1
Valo
rede
lpar
amet
ro
Pos
izio
nede
lpot
enzi
o-m
etro
[%]
Num
ero
eno
me
del
para
met
ro
non
iniz
ializ
zato
(rag
giun
-gi
bile
tram
iteP
rese
t)
1x >5
s
Dis
pla
y
Pos
izio
ne[%
]
Set
poin
t[%
]
Pos
izio
ne[%
]
Set
poin
t[%
]
Au
tom
atic
o
Mo
do
difu
nzi
on
.
Man
uale
Cam
biar
ela
posi
zion
e
P-F
unzi
onam
ento
inm
anua
le
Con
figur
azio
ne
xx.x
xxx
>5
sco
n
Cam
biar
ela
posi
zion
eco
n
1,5
kΩ
40Ω
40Ω
1,5
kΩ9,
2V
9,2
V1.
)
3.)
4.)
6.)
7.)
5.)
8.)
2.)
>5
s
Pre
men
doil
tast
osi
attiv
ala
mis
ura
zio
ne
del
lep
erd
ite
Impo
star
esu
llale
vail
valo
redi
cors
aim
med
iata
men
tem
inor
e
66.
26.
110
3
78
9
1 2 3 4 5 6 7 8 9 10
42 1
5
90° 33
°
6
11
*)
Con
attu
ator
ivel
oci
pros
egui
reco
n:co
nt.c
on:
**)
Prim
adi
colle
gare
l'ene
rgia
ausi
liaria
side
veta
ssat
ivam
ente
rimuo
vere
ilpo
ntic
ello
fra
imor
setti
1e
2.!
Prim
adi
colle
gare
l'ene
rgia
ausi
liaria
side
veta
ssat
iva-
men
terim
uove
reil
pont
icel
lofr
ai
mor
setti
1e
2.
!
Co
lleg
amen
toa
3/4
fili
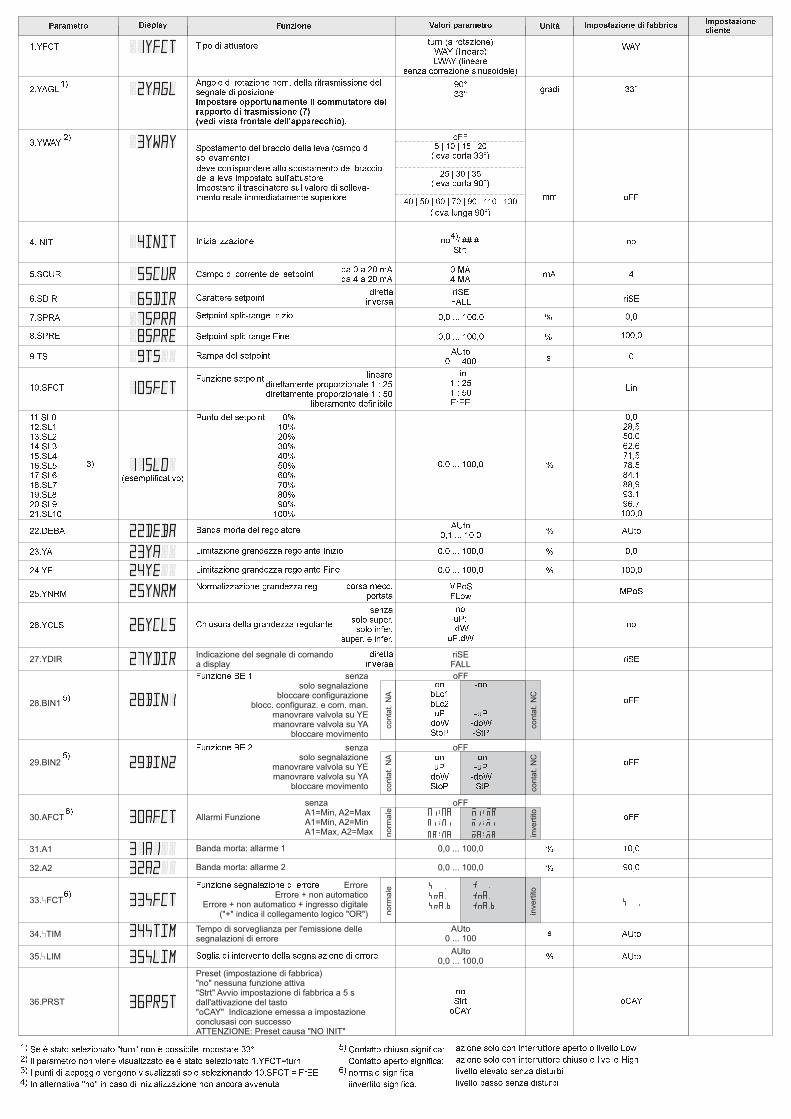
Se è stato selezionato "turn" non è possibile impostare 33°
Il parametro non viene visualizzato se è stato selezionato 1.YFCT=turn
I punti di appoggio vengono visualizzati solo selezionando 10.SFCT = FrEE
In alternativa "no" in caso di inizializzazione non ancora avvenuta
Contatto chiuso significa:
Contatto aperto significa:
normale significa
iinvertito significa:
1)
2)
3)
4)
5)
6)
Spostamento del braccio della leva (campo disollevamento)
Inizializzazione
Campo di corrente del setpoint
Setpoint split-range Inizio
Setpoint split-range Fine
Rampa del setpoint
Funzione setpoint
Carattere setpoint
0%10%20%30%40%50%60%70%80%90%
100%
Banda morta del regolatore
Limitazione grandezza regolante Inizio
Limitazione grandezza regolante Fine
Normalizzazione grandezza reg.
Chiusura della grandezza regolante
no / ##.#Strt
0 MA4 MA
riSEFALL
0,0 ... 100,0
0,0 ... 100,0
AUto0 ... 400
AUto0,1 ... 10,0
Lin1 : 251 : 50FrEE
0,0 ... 100,0
0,0 ... 100,0
0,0 ... 100,0
MPoSFLow
nouP::dW
uP:dW
noStrtoCAY
Soglia di intervento della segnalazione di errore
oFF5 | 10 | 15 | 20
25 | 30 | 35
40 | 50 | 60 | 70 | 90 | 110 | 130
(leva corta 33°)
(leva corta 90°)
(leva lunga 90°)
90°33°
Angolo di rotazione nom. della ritrasmissione delsegnale di posizioneImpostare opportunamente il commutatore delrapporto di trasmissione (7)(vedi vista frontale dell'apparecchio).
Tipo di attuatore
3.YWAY2)
1)
4.INIT
6.SDIR
7.SPRA
8.SPRE
9.TS
10.SFCT
11.SL012.SL113.SL214.SL315.SL416.SL517.SL618.SL719.SL820.SL921.SL10
22.DEBA
23.YA
24.YE
26.YCLS
5.SCUR
3)
5)
5)
6)
6)
25.YNRM
2.YAGL
1.YFCTturn (a rotazione)WAY (lineare)LWAY (lineare
senza correzione sinusoidale)
(esemplificativo)
senzasolo super.solo infer.
super. e infer.
deve corrispondere allo spostamento del bracciodella leva impostato sull'attuatoreImpostare il trascinatore sul valore di solleva-mento reale immediatamente superiore
da 0 a 20 mAda 4 a 20 mA
linearedirettamente proporzionale 1 : 25direttamente proporzionale 1 : 50
liberamente definibile
corsa mecc.portata
direttainversa
4)
direttainversa
onuPdoWStoP
-on-uP-doW-StP
onbLc1bLc2uPdoWStoP
-on
-uP-doW-StP
norm
ale
invert
ito
invert
iert
norm
ale
mm
0,028,550,062,671,578,584,188,993,196,7100,0
oCAY
AUtos
%
% 10,0
90,0
oFF
oFF
oFF
riSE
no
MPoS
100,0
0,0
AUto
Lin
0
%
%
%
%
s
%
%
mA
100,0
0,0
riSE
4
% AUto
oFF
gradi 33°
WAY
no
conta
t.N
Cconta
t.N
C
conta
t.N
Aconta
t.N
A
Funzione BE 1
Funzione BE 2
Funzione segnalazione di errore
azione solo con interruttore aperto o livello Low
azione solo con interruttore chiuso o livello High
livello elevato senza disturbi
livello basso senza disturbi
Parametro Display Funzione Valori parametro Unità Impostazione di fabbricaImpostazionecliente
Punto del setpoint
invert
ito

Vis
tafr
onta
led
ell'a
pp
arec
chia
tura
(cop
erch
ioap
erto
)
Pie
ghev
ole
"Uso
insi
ntes
i"(N
dio
rd.C
7900
0-B
7472
-C16
0-01
)o
SIP
AR
TP
S2
PA6
DR
410x
-xx
negl
iattu
ator
iado
ppio
effe
tto
Ingr
esso
:aria
dial
imen
tazi
one
PZ
Usc
ita:a
riadi
com
ando
Y1
Dis
play
Usc
ita:a
riadi
com
ando
Y2
**Ta
stid
icom
ando
Stro
zzam
ento
Y1
Stro
zzam
ento
Y1
**S
trozz
amen
toY
2**
Com
mut
ator
era
ppor
todi
tras
mis
sion
eM
anop
ola
rego
la-
zion
egi
unto
afr
izio
neM
orse
ttier
aap
pa-
recc
hiat
ura
base
Mor
setti
ere
mod
uli
opzi
onal
iC
omm
utat
ore
aria
dila
vagg
io
)
) )
1 2 3 4 5 66.
16.
2 7 8 9 10 11
Cam
bio
del
lam
od
alit
àd
icom
ando
Co
lleg
amen
to
Mes
sagg
ip
oss
ibili
Pri
ma
mes
sain
serv
izio
inau
tom
atic
o(p
arte
ndo
dalle
impo
staz
ioni
difa
bbric
a)
Lab
and
adi
tolle
-ra
nza
dow
nno
nè
stat
ara
gg
iun
tao
èst
ata
supe
rata
Laba
nda
dito
lle-
ran
zau
pè
stat
asu
pera
ta
Com
mut
are
ilra
ppor
todi
trasm
issi
one
(7)
cont
inua
reco
n:
Por
tare
lale
vadi
tras
cina
men
toin
posi
zion
eor
izzo
ntal
eag
endo
su Impo
star
esu
llale
vail
valo
redi
cors
aim
med
iata
men
tem
aggi
ore
Laba
nda
up-d
own
èst
ata
ragg
iunt
a
Neg
liat
tuat
oria
rota
zion
eè
inol
trepo
ssib
ile:
Tem
podi
cors
atr
op
po
brev
eA
umen
tare
ilte
mpo
dico
rsa
agen
dosu
llost
rozz
amen
to
cont
inua
reco
n:
op
pu
rere
gola
reil
giun
toa
frizi
one
fino
aqu
ando
suld
is-
play
vien
evi
sual
izza
to
po
isol
oco
ntin
uare
con:
L'a
ttu
ato
ren
on
sim
uo
veC
ontro
llare
eap
rire
even
tual
-m
ente
lost
rozz
amen
to(6
)
Sig
nifi
cato
Dis
pla
yM
isur
e
Por
tare
l'attu
ator
ene
lcam
poop
erat
ivo
con
Con
ferm
are
con:
Con
ferm
are
con:
Con
ferm
are
con:
Per
altr
imes
sag
gic
on
sult
are
ilm
anu
ale
del
l'ap
par
ecch
io
cont
inua
reco
n:
cont
inua
reco
n:
Ria
vvia
rel'i
nizi
aliz
zazi
one
Ria
vvia
rel'i
nizi
aliz
zazi
one
Ria
vvia
rel'i
nizi
aliz
zazi
one
Se
èst
ato
reg
ola
toil
giu
nto
afr
izio
ne
lare
gola
zion
em
edia
nte
fino
aqu
ando
suld
ispl
ayvi
ene
visu
aliz
zato
Det
erm
inaz
ione
dell'
azio
ne
Verif
ica
della
cors
ae
tara
tura
dello
zero
ede
llaco
rsa
(bat
tuta
-ba
ttuta
)D
eter
min
azio
nee
visu
aliz
zazi
one
deit
empi
dico
rsa
dow
n(d
xx.x
),up
(uxx
.x)
Pas
soS
ign
ific
ato
Iniz
ializ
zazi
one
eseg
uita
con
succ
esso
(cor
sain
mm
nelc
aso
diat
tuat
ori
linea
ri,an
golo
diro
tazi
one
nelc
aso
diat
tuat
oria
rota
zion
e)
Otti
miz
zazi
one
della
rispo
sta
Det
erm
inaz
ione
della
dura
tam
inim
ade
glii
mpu
lsi
Attu
ator
elin
eare
Attu
ator
ea
rota
zion
e
*)
*)P
erle
poss
ibili
impo
staz
ioni
,v.a
terg
o
Pre
mer
e>
5s
Ipas
sire
stan
tisi
svol
gono
inau
tom
atic
o
(Iva
lori
grig
inel
lapr
ima
riga
deld
ispl
ayso
noes
empl
ifica
tivi.)
*)
Co
nfi
gu
razi
on
e
(sim
ulta
neam
ente
)
(sim
ulta
neam
ente
)
(sim
ulta
neam
.)
(sim
ulta
neam
.)
>5
s
fino
a
Valo
rede
lpar
amet
ro
Pos
izio
nede
lpot
enzi
o-m
etro
[%]
Num
ero
eno
me
del
para
met
ro
non
iniz
ializ
zato
(rag
giun
-gi
bile
tram
iteP
rese
t)
1x >5
s
Dis
pla
y
Pos
izio
ne[%
]
Set
poin
t[%
]
Pos
izio
ne[%
]
Set
poin
t[%
]
Au
tom
atic
o
Mo
do
difu
nzi
on
.
Man
uale
Cam
biar
ela
posi
zion
e
P-F
unzi
onam
ento
inm
anua
le
Con
figur
azio
ne
xx.x
xxx
>5
sco
n
Cam
biar
ela
posi
zion
eco
n
1.)
3.)
4.)
6.)
7.)
5.)
8.)
2.)
>5
s
Pre
men
doil
tast
osi
attiv
ala
mis
ura
zio
ne
del
lep
erd
ite
Impo
star
esu
llale
vail
valo
redi
cors
aim
med
iata
men
tem
inor
e
*)
Con
attu
ator
ivel
oci
pros
egui
reco
n:co
nt.c
on:
**)
89
3 7 9 10
42 1
56
6.2
6.1
10
3
7
90° 33
°
6
11
Acc
oppi
ator
eD
P/P
A
9...
24V
10973
Ingr
esso
digi
tale
1
Pos
izio
nato
re
+3V
-+P
RO
FIB
US
PAIE
C11
58-2
#
#A
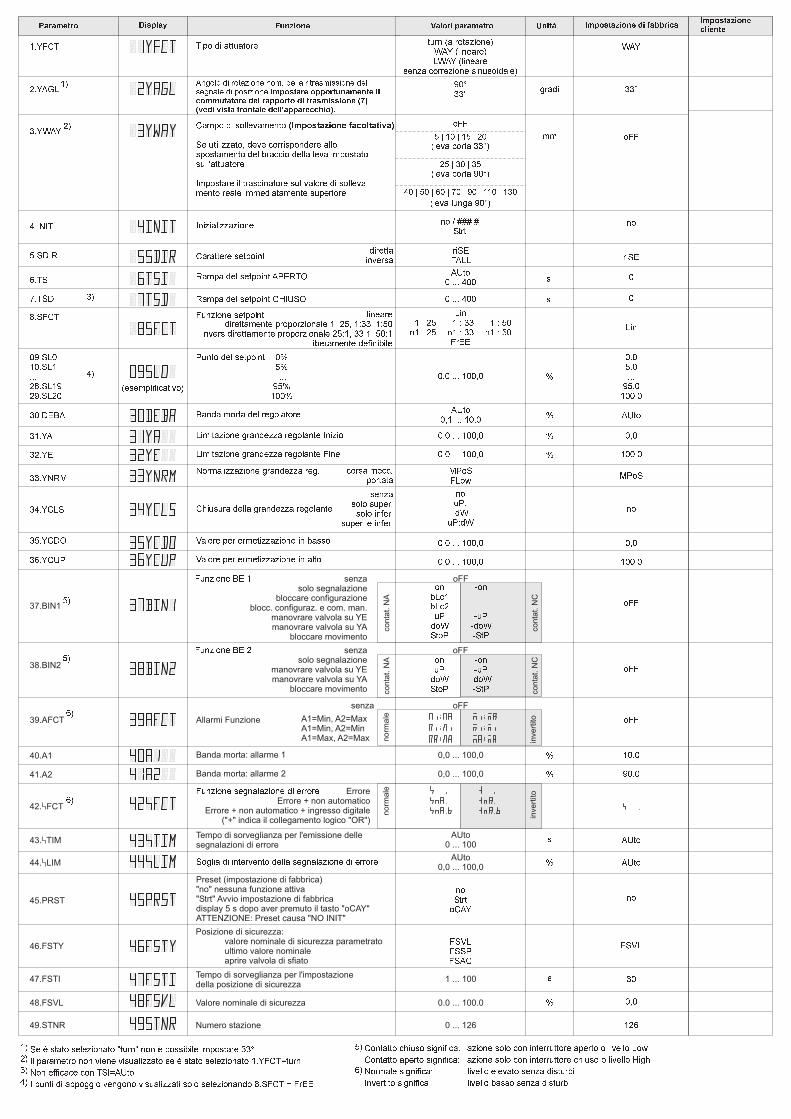
Se è stato selezionato "turn" non è possibile impostare 33°
Il parametro non viene visualizzato se è stato selezionato 1.YFCT=turn
Non efficace con TSI=AUto
I punti di appoggio vengono visualizzati solo selezionando 8.SFCT = FrEE
1)
2)
3)
4)
5)
6)
3.YWAYCampo di sollevamento
Se utilizzato, deve corrispondere allospostamento del braccio della leva impostatosull'attuatore
Impostare il trascinatore sul valore di solleva-mento reale immediatamente superiore
(Impostazione facoltativa)
mm
2)
1)
4.INIT
6.TSI
7.TSD
8.SFCT
09.SL010.SL1...28.SL1929.SL20
Inizializzazione
Rampa del setpoint APERTO
Rampa del setpoint CHIUSO
Funzione setpoint
Carattere setpoint
0.05.0...
95.0100.0
5.SDIR
no / ###.#Strt
riSEFALL
AUto0 ... 400
0 ... 400
Lin1 : 33
FrEEn1 : 33
1 : 50n1 : 50
1 : 25n1 : 25
0,0 ... 100,0
Lin
0
0
%
s
s
riSE
4)
3)
oFF
40 | 50 | 60 | 70 | 90 | 110 | 130
25 | 30 | 35
5 | 10 | 15 | 20
oFF
(leva corta 33°)
(leva corta 90°)
(leva lunga 90°)
2.YAGL90°33°
gradi 33°Angolo di rotazione nom. della ritrasmissione delsegnale di posizione Impostare opportunamente ilcommutatore del rapporto di trasmissione (7)(vedi vista frontale dell'apparecchio).
Tipo di attuatore1.YFCT WAYturn (a rotazione)WAY (lineare)LWAY (lineare
senza correzione sinusoidale)
(esemplificativo)
no
linearedirettamente proporzionale 1: 25, 1:33, 1:50
invers direttamente proporzionale 25:1, 33:1, 50:1liberamente definibile
30.DEBA
31.YA
32.YE
34.YCLS
35.YCDO
36.YCUP
Banda morta del regolatore
Limitazione grandezza regolante Inizio
Limitazione grandezza regolante Fine
Normalizzazione grandezza reg.
Chiusura della grandezza regolante
Valore per ermetizzazione in basso
Valore per ermetizzazione in alto
AUto0,1 ... 10,0
0,0 ... 100,0
0,0 ... 100,0
0,0 ... 100,0
0,0 ... 100,0
MPoSFLow
nouP::dW
uP:dW
no
MPoS
100,0
100,0
0,0
0,0
AUto
%
%
%
33.YNRM
senzasolo super.solo infer.
super. e infer.
corsa mecc.portata
6)
6)
direttainversa
%
%
30
126
0,0
90,0
10,0
oFF
oFF
oFF5)
5) onuPdoWStoP
-on-uP-doW-StP
onbLc1bLc2uPdoWStoP
-on
-uP-doW-StP
noStrtoCAY
FSVLFSSPFSAC
FSVL
no
AUtos
s
%
%
AUtoSoglia di intervento della segnalazione di errore
Parametro Display Funzione Valori parametro Unità Impostazione di fabbricaImpostazionecliente
Funzione BE 1
Funzione BE 2
Funzione segnalazione di errore
Punto del setpoint 0%5%...
95%100%
Contatto chiuso significa:
Contatto aperto significa:
Normale significa:
Invertito significa:
azione solo con interruttore aperto o livello Low
azione solo con interruttore chiuso o livello High
livello elevato senza disturbi
livello basso senza disturbi

C79000-M7450-C156-01
ÍndicePágina
1 Indicaciones técnicas de seguridad 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1 Significado de las indicaciones 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Introducción 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Volumen de suministro 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Montaje 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 Generalidades 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Kit de montaje ”Accionamiento lineal” 6DR4004–8V y 6DR4004–8L 62. . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.1 Procedimiento de montaje (ver fig. 1) 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Kit de montaje ”Accionamiento de giro” 6DR4004–8D 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Procedimiento de montaje (ver fig. 2) 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Módulos opcionales (ver fig. 3, anexo) 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Conexión eléctrica 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Conexión neumática (ver fig. 16, anexo) 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Puesta en marcha (ver hoja plegada ”Operación – instrucciones breves”) 67. . . . . . . . . . . . . . . . . . . . . 7.1 Preparaciones para el accionamiento lineal 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1.1 Inicialización de accionamientos lineales 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2 Preparaciones para el accionamiento de giro 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.2.1 Inicialización de accionamientos de giro 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Confomidad 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figuras 3 a 17 en el anexo
C79000-M7450-C156-01
1 Indicaciones técnicas de seguridad
1.1 Significado de las indicaciones
!Precaución
significa que si no se adoptan las medidas preventivas correspondientes pueden producirselesiones corporales graves y/o daños materiales considerables, incluso hasta la muerte.
!Cuidado
significa que si no se adoptan las medidas preventivas correspondientes pueden producirselesiones corporales leves y/o daños materiales.
Nota
es una información importante sobre el producto, su manipulación o de la parte correspondiente dela documentación en donde se debe prestar especial atención.
1.2 Introducción
Las siguientes instrucciones de montaje e instalación equivalen a las instrucciones de servicio conforme a laDirectiva del Consejo de la Comunidad Europea, de 23 de marzo de 1994 (94/9/CE). Esta describe los pasosbásicos para el montaje, la conexión y la puesta en marcha.
Las instrucciones de montaje e instalación no reemplazan al manual del posicionador electroneumáticoSIPART PS2. En el manual encontrará más información acerca del montaje, el funcionamiento y el manejo.
El manual del aparato puede solicitarse en nuestras oficinas bajo el siguiente número de pedido:
C79000-G7400-C158 (alemán)C79000-G7476-C158 (inglés)
Las instrucciones de montaje e instalación y el manual valen para los posicionadores con o sin PROFIBUS PA.Sus diferencias están marcadas respectivamente.
Funcionamiento sin peligroEste aparato ha dejado nuestra fábrica en perfecto estado técnico y de calidad. Para mantener dicho estado yasegurar un funcionamiento sin inconvenientes se deben tener en cuenta las indicaciones y precaucionesindicadas en estas instrucciones.
Personal calificadoEn el sentido de estas instrucciones de montaje e instalación, el personal calificado son personas familiarizadascon el montaje, la puesta en marcha y el funcionamiento de este producto. Además deben poseer la capacidadprofesional para realizar dichos trabajos, p. ej.:
Formación, instrucción o autorización para la conexión y desconexión, la identifiación y puesta a tierra delazos de corriente, aparatos y sistemas según las normas actuales de las técnicas de seguridad
Formación o instrucción en el uso y cuidado del equipamiento de seguridad según las normas actuales delas técnicas de seguridad
Formación en primeros auxilios En aparatos con protección contra explosión: formación, instrucción o autorización para trabajar con
circuitos eléctricos de instalaciones con riesgo de explosión
!Precaución
El aparato debe ser montado y puesto en marcha sólo por pesonal experimentado.El aparato está diseñado para tensiones de función y tensiones bajas de protección.La seguridad eléctrica está determinada únicamente por los aparatos de alimentación.En los accionamientos neumáticos se generan grandes fuerzas de mando. Por ello, para evitarlesiones, el montaje y la puesta en marcha deben realizarse teniendo especialmente en cuenta lasnormas de seguridad. En los casos de instalaciones con riesgo de explosión se encuentran las recomendacionespertinentes en forma explícita.
El funcionamiento correcto y seguro de este aparato presupone un transporte, un almacenamiento y unainstalación adecuados, así como una operación y un mantenimiento cuidadosos.

C79000-M7450-C156-01
2 Volumen de suministro
Posicionador según el pedido
Versión SIPART PS2 número de pedido
SIPART PS2 PA número de pedido
de simple efecto, no Ex, carcasa plástica 6DR4000–1N 6DR4100–1N
de doble efecto, no Ex, carcasa plástica 6DR4000–2N 6DR4100–2N
de simple efecto, Ex, carcasa plástica 6DR4000–1E (PTB)6DR4000–1F (FM)
6DR4100–1E (PTB)
de doble efecto, Ex, carcasa plástica 6DR4000–2E (PTB)6DR4000–2F (FM)
6DR4100–2E (PTB)
de simple efecto, no Ex, carcasa metálica 6DR4001–1N 6DR4101–1N
de simple efecto, Ex, carcasa metálica 6DR4001–1E (PTB)6DR4001–1F (FM)
6DR4101–1E (PTB)
Instrucciones de montaje e instalación en alemán / inglés (adjuntas al aparato) Hoja plegada ”Operación – instrucciones breves” en alemán e inglés (en el aparato)
3 Montaje
3.1 Generalidades
!Precaución
El posicionador y sus módulos opcionales se suministran como unidades por separado y en diferentes versiones. Se disponen de posicionadores y módulos opcionales para el funcionamientoen áreas con o sin riesgo de explosión. Dichas versiones están marcadas mediante un rótulo especial correspondiente.
Al reunir varios componentes debe garantizarse que los posicionadores y los módulos opcionalesutilizados estén autorizados para dicha área de aplicación; en especial para el funcionamiento seguro del posicionador en áreas cuya atmósfera pueda ser explosiva (zona 1 y 2). Para ello esimportante tener en cuenta las categorías del aparato mismo (2 y 3) y sus opciones.
!Precaución
Para evitar lesiones o daños mecánicos en el posicionador/kit de montaje debe realizarse elmontaje en el siguiente orden:
1. Montar el posicionador mecánicamente véase capítulo 3 (según la versión)
2. Conectar la alimentación eléctrica véase capítulo 5
3. Conectar la alimentación neumática véase capítulo 6
4. Realizar la puesta en marcha véase capítulo 7
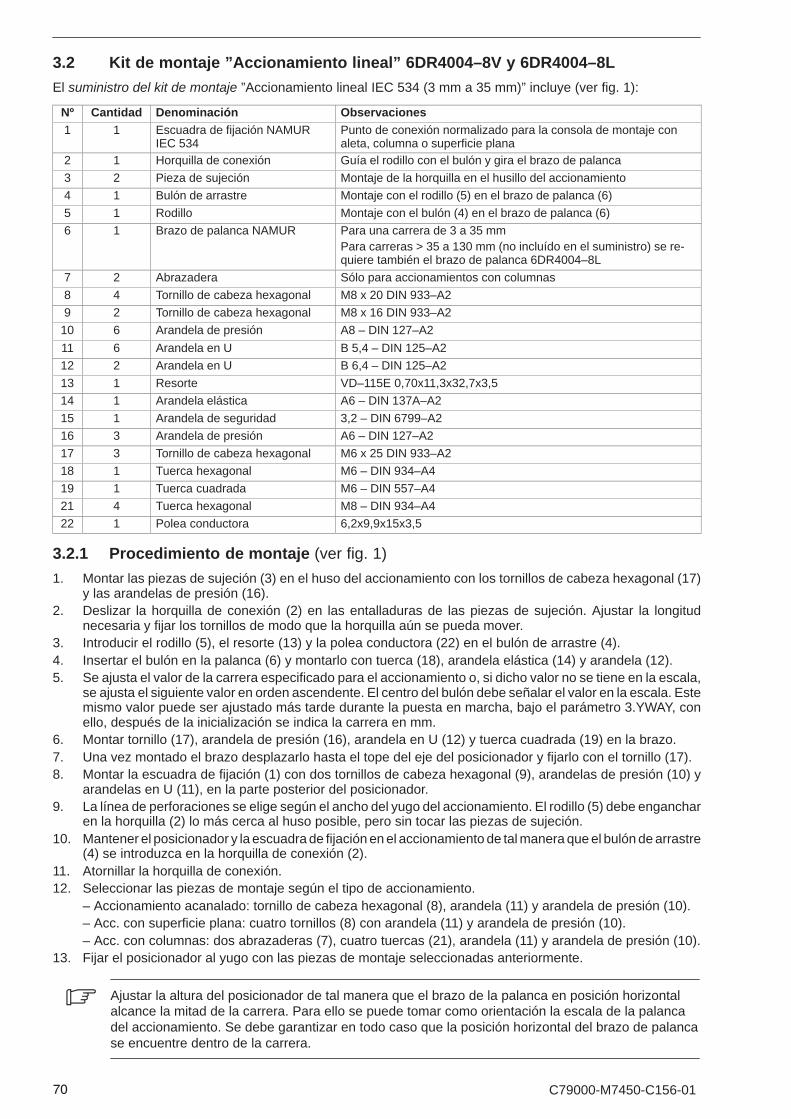
C79000-M7450-C156-01
3.2 Kit de montaje ”Accionamiento lineal” 6DR4004–8V y 6DR4004–8L
El suministro del kit de montaje ”Accionamiento lineal IEC 534 (3 mm a 35 mm)” incluye (ver fig. 1):
Nº Cantidad Denominación Observaciones1 1 Escuadra de fijación NAMUR
IEC 534Punto de conexión normalizado para la consola de montaje conaleta, columna o superficie plana
2 1 Horquilla de conexión Guía el rodillo con el bulón y gira el brazo de palanca
3 2 Pieza de sujeción Montaje de la horquilla en el husillo del accionamiento
4 1 Bulón de arrastre Montaje con el rodillo (5) en el brazo de palanca (6)
5 1 Rodillo Montaje con el bulón (4) en el brazo de palanca (6)
6 1 Brazo de palanca NAMUR Para una carrera de 3 a 35 mmPara carreras > 35 a 130 mm (no incluído en el suministro) se re-quiere también el brazo de palanca 6DR4004–8L
7 2 Abrazadera Sólo para accionamientos con columnas
8 4 Tornillo de cabeza hexagonal M8 x 20 DIN 933–A2
9 2 Tornillo de cabeza hexagonal M8 x 16 DIN 933–A2
10 6 Arandela de presión A8 – DIN 127–A2
11 6 Arandela en U B 5,4 – DIN 125–A2
12 2 Arandela en U B 6,4 – DIN 125–A2
13 1 Resorte VD–115E 0,70x11,3x32,7x3,5
14 1 Arandela elástica A6 – DIN 137A–A2
15 1 Arandela de seguridad 3,2 – DIN 6799–A2
16 3 Arandela de presión A6 – DIN 127–A2
17 3 Tornillo de cabeza hexagonal M6 x 25 DIN 933–A2
18 1 Tuerca hexagonal M6 – DIN 934–A4
19 1 Tuerca cuadrada M6 – DIN 557–A4
21 4 Tuerca hexagonal M8 – DIN 934–A4
22 1 Polea conductora 6,2x9,9x15x3,5
3.2.1 Procedimiento de montaje (ver fig. 1)
1. Montar las piezas de sujeción (3) en el huso del accionamiento con los tornillos de cabeza hexagonal (17)y las arandelas de presión (16).
2. Deslizar la horquilla de conexión (2) en las entalladuras de las piezas de sujeción. Ajustar la longitudnecesaria y fijar los tornillos de modo que la horquilla aún se pueda mover.
3. Introducir el rodillo (5), el resorte (13) y la polea conductora (22) en el bulón de arrastre (4).4. Insertar el bulón en la palanca (6) y montarlo con tuerca (18), arandela elástica (14) y arandela (12).5. Se ajusta el valor de la carrera especificado para el accionamiento o, si dicho valor no se tiene en la escala,
se ajusta el siguiente valor en orden ascendente. El centro del bulón debe señalar el valor en la escala. Estemismo valor puede ser ajustado más tarde durante la puesta en marcha, bajo el parámetro 3.YWAY, conello, después de la inicialización se indica la carrera en mm.
6. Montar tornillo (17), arandela de presión (16), arandela en U (12) y tuerca cuadrada (19) en la brazo.7. Una vez montado el brazo desplazarlo hasta el tope del eje del posicionador y fijarlo con el tornillo (17).8. Montar la escuadra de fijación (1) con dos tornillos de cabeza hexagonal (9), arandelas de presión (10) y
arandelas en U (11), en la parte posterior del posicionador.9. La línea de perforaciones se elige según el ancho del yugo del accionamiento. El rodillo (5) debe enganchar
en la horquilla (2) lo más cerca al huso posible, pero sin tocar las piezas de sujeción.10. Mantener el posicionador y la escuadra de fijación en el accionamiento de tal manera que el bulón de arrastre
(4) se introduzca en la horquilla de conexión (2).11. Atornillar la horquilla de conexión.12. Seleccionar las piezas de montaje según el tipo de accionamiento.
– Accionamiento acanalado: tornillo de cabeza hexagonal (8), arandela (11) y arandela de presión (10).– Acc. con superficie plana: cuatro tornillos (8) con arandela (11) y arandela de presión (10).– Acc. con columnas: dos abrazaderas (7), cuatro tuercas (21), arandela (11) y arandela de presión (10).
13. Fijar el posicionador al yugo con las piezas de montaje seleccionadas anteriormente.
Ajustar la altura del posicionador de tal manera que el brazo de la palanca en posición horizontalalcance la mitad de la carrera. Para ello se puede tomar como orientación la escala de la palancadel accionamiento. Se debe garantizar en todo caso que la posición horizontal del brazo de palancase encuentre dentro de la carrera.

C79000-M7450-C156-01
Montaje en yugos con columnas
Montaje en yugos con superficie plana
Montaje en yugos con aleta
2)
4)
4 5
1322
612
14
19
1216
17
8
1
10
11
7
21
11 10
11
8
10
18
3)9
1011
910
11
1
en caso necesario
1)
2
17
16
3
Figura 1 Procedimiento de montaje (accionamiento lineal)

C79000-M7450-C156-01
3.3 Kit de montaje ”Accionamiento de giro” 6DR4004–8D
El suministro del kit de montaje ”Accionamiento de giro” incluye (ver fig. 2):
Nº Cantidad Denominación Observaciones2 1 Rueda de acoplamiento Montaje en el eje para el retroaviso de la posición del
SIPART PS23 1 Tope de arrastre Montaje en el fin de eje del accionamiento4 1 Placa múltiple Indicación de la posición del accionamiento, consta de: 4.1 y 4.2
4.1 8 Escala Diferentes divisiones4.2 1 Indice marcador Punto de referencia para la escala (etiqueta adhesiva)14 4 Tornillo de cabeza
hexagonalDIN 933 – M6 x 12
15 4 Arandela de seguridad S616 1 Tornillo de cabeza
cilíndricaDIN 84 – M6 x 12
17 1 Arandela DIN 125 – 6,418 1 Tornillo cilíndrico con
hexágono hembrapremontado con la rueda de acoplamiento
19 1 Llave de machohexagonal
para posición 18
3.3.1 Procedimiento de montaje (ver fig. 2)
1. Poner la consola de montaje VDI/VDE 3845 ((9), específica para el accionamiento, suministrada por elfabricante del accionamiento) en la parte posterior del posicionador y atornillarla con los tornillos de cabezahexagonal (14) y las arandelas de seguridad (15).
2. Pegar el índice marcador (4.2) sobre la consola de montaje en medio del agujero central.
3. Deslizar la rueda de acoplamiento (2) hasta el tope del eje del posicionador, retrocederla aprox. 1 mm yatornillar el tornillo cilíndrico con hexágono hembra (18) con la llave suministrada.
4. Poner el tope de arrastre (3) en el fin de eje del accionamiento y atornillarlo con el tornillo de cabeza cilíndrica(16) y la arandela (17).
5. Colocar el posicionador, ya montado en la consola, sobre el accionamiento de manera que el pasador dela rueda de acoplamiento enganche el tope de arrastre.
6. Colocar la unidad posicionador/consola de montaje en el centro del accionamiento y atornillarla.(¡los tornillos no forman parte del suministro del posicionador, sino del de la consola de montaje delaccionamiento!)
7. Al terminar la puesta en marcha según lo indicado en el capítulo 7: colocar el accionamiento en la posiciónfinal y pegar la escala (4.1) sobre la rueda de acoplamiento (2) en el sentido de rotación o bien en la carreracorrespondiente. ¡La escala es autoadhesiva!
4 Módulos opcionales (ver fig. 3, anexo)
Desatornillar la tapa de la carcasa.
Desatornillar la cubierta de los módulos (1).
Módulo HART (sólo para aparatos sin PROFIBUS PA): Insertar el módulo HART (2) en la regleta deconexión, después de haber retirado el puente enchufable (7) de la regleta superior.
Módulo Jy: Introducir el módulo Jy (3) en la ranura inferior del contenedor, establecer la conexión eléctricacon el cable plano adjunto (6).
Módulo de alarma: Introducir el módulo de alarma (4) en la ranura superior del contenedor, establecer laconexión eléctrica con el cable plano adjunto (5).

C79000-M7450-C156-01
0% 20 40 60 80 100%
1) 2)
3)
4)5)
182
9
4.2
3
16
17
24.1
2
3
9
1415
Figura 2 Procedimiento de montaje (accionamiento de giro)

C79000-M7450-C156-01
5 Conexión eléctrica
Aparatos sin PROFIBUS PA
(ver figs. 5, 6 y 10 a 15, anexo)Conexión eléctrica: Bornas atornillables 1,5Boquilla de paso: PG 13Rango de señal del valor de consigna w: 4 a 20 mA con conexión a 2 hilos (ver fig. 5, anexo)
tensión de carga necesaria 10 V sin módulo HART, 11 V con módulo HART
0/4 a 20 mA con conexión a 3 ó 4 hilos (ver fig. 6, anexo) tensión de carga 0,8 V sin módulo HART,
1,8 V con módulo HART alimentación UH: +18 V a +35 V (+30 V para Ex)
Nota
Antes de operar con una conexión a 3 ó 4 hilos se debe retirar ineludiblemente el puente entre lasbornas 1 y 2.
Aparatos con PROFIBUS PA
(ver figs. 7 a 9, anexo)Conexión eléctrica: Bornas atornillables 1,5Boquilla de paso: PG 13Energía auxiliar: alimentada por busTensión de bus: 9 a 24 V en funcionamiento intrínseco
9 a 32 V en funcionamiento no intrínsecoPolaridad: cualquieraConsumo: 12 mA ± 10%Limitación electrónica de corriente: Imáx ≤ 16 mA en caso de fallo
Montaje del cable de bus
1. Pele el cable de bus según la figura 7 en el anexo.2. Abra la carcasa del posicionador soltando los cuatro tornillos de la tapa.3. Inserte el cable de bus preparado en el racor de PG.4. Fije el blindaje a la carcasa utilizando la abrazadera y los dos tornillos.5. Atornille el racor de PG.6. Conecte el cable rojo y el verde en las bornas 3 y 7 de la tarjeta básica según la figura 8 (sin importar la
polaridad).
6 Conexión neumática (ver fig. 16, anexo)
!Precaución
Por razones de seguridad, después del montaje, la alimentación neumática debe ser conectada sola-mente si en presencia de una señal eléctrica el posicionador se encuentra en el nivel de operaciónP–servicio manual (versión suministrada, ver hoja plegada ”Operación – instrucciones breves”).
Nota
¡Tener en cuenta la calidad del aire! Aire industrial no lubricado, contenido de sólidos < 30 m,punto de condensación de la presión 20 K por debajo de la menor temperatura ambiente.

C79000-M7450-C156-01
En caso necesario, conectar el bloque de manómetros para la presión del aire de alimentación y la presiónde ajuste.
Conexión a través de rosca interior G 1/4 DIN 45141:PZ Aire de alimentación 1,4 a 7 barY1 Presión de ajuste 1 para accionamientos de simple y doble efectoY2 Presión de ajuste 2 para accionamientos de doble efectoE Salida del aire (en caso necesario, retirar el silenciador)
Posición de seguridad en caso de fallo de la alimentación eléctrica:simple efecto Y1 Expulsa el airedoble efecto Y1 Máx. presión de ajuste (presión del aire de alimentación)
Y2 Expulsa el aire
Conectar la presión de ajuste Y1 o Y2 (sólo en accionamientos de doble efecto) según la posición deseguridad deseada.
Conectar el aire de alimentación PZ.
7 Puesta en marcha (ver hoja plegada ”Operación – instrucciones breves”)
Ya que el posicionador tiene tantos usos, es necesario su adaptación (inicialización) individual al accionamientocorrespondiente, después de haberse efectuado su montaje. Dicha inicialización se efectúa en gran parte auto-máticamente. Con ello, el posicionador determina en el accionamiento el sentido de actuación, la carrera, elángulo de giro, el tiempo de ajuste, etc.
Antes de la inicialización deben escribirse unos pocos parámetros. Los demás parámetros están preajustadosde tal forma que en caso normal no es necesario su modificación. La puesta en marcha se puede efectuar sinproblema alguno si se tienen en cuenta los siguientes puntos.
Recomendación: El parámetro anterior se obtiene oprimiendo simultáneamente las teclas y
7.1 Preparaciones para el accionamiento lineal
1. Montar el posicionador con su respectivo kit de montaje (ver apartado 3.2).
Nota
La posición del conmutador de la transmisión del engranaje (7, hoja plegada ”Operación –instrucciones breves”) en el posicionador es muy importante:
Carrera Palanca Posición del conmutador de la transmisión del engranaje
5 a 20 mm corta 33° (es decir, abajo)
25 a 35 mm corta 90° (es decir, arriba)
40 a 130 mm larga 90° (es decir, arriba)
2. Coloque el bulón de arrastre (4, figs. 1, 2) sobre el brazo de palanca (6, figs. 1, 2) en el valor correspondientea la carrera nominal o en el siguiente valor en orden ascendente y atorníllelo con una tuerca (18, figs. 1, 2).
3. Conecte el accionamiento y el posicionador utilizando conductores neumáticos y alimente el posicionadorcon la energía auxiliar neumática (ver fig. 16).
4. Conecte una fuente de tensión o de corriente apropiada (ver figs. 5, 6 y 9 con PROFIBUS PA).5. El posicionador se encuentra ahora en el modo de operación ”P–Servicio manual”. En la línea superior
aparece la tensión actual del potenciómetro (P) en porcentaje, p. ej.: ”P12.3”, y en la línea inferior parpadeala indicación ”NOINIT”:
6. Compruebe el movimiento libre de la mecánica en todo el margen de ajuste graduando el accionamientocon las teclas y y llevándolo a la posición final correspondiente.Recomendación: El accionamiento también se puede graduar rápido oprimiendo adicionalmente lasegunda tecla de sentido al mismo tiempo que se mantiene oprimida la primera tecla de sentido yaseleccionada.
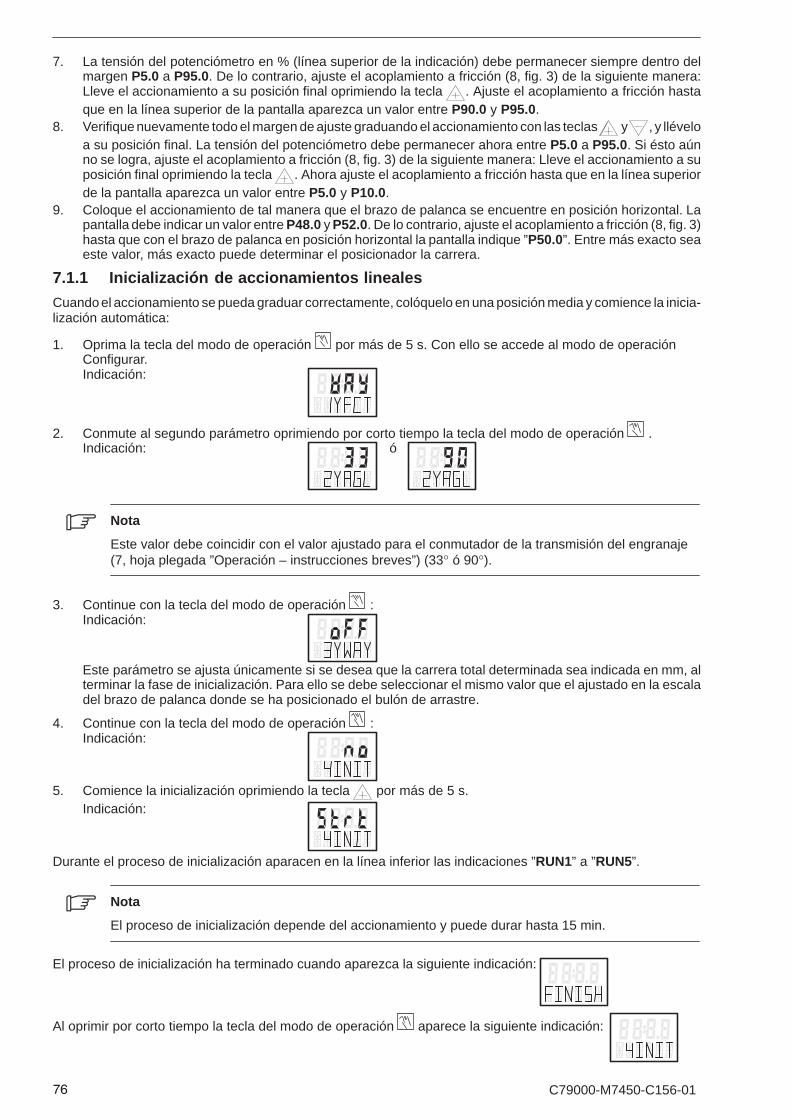
C79000-M7450-C156-01
7. La tensión del potenciómetro en % (línea superior de la indicación) debe permanecer siempre dentro delmargen P5.0 a P95.0. De lo contrario, ajuste el acoplamiento a fricción (8, fig. 3) de la siguiente manera:Lleve el accionamiento a su posición final oprimiendo la tecla . Ajuste el acoplamiento a fricción hastaque en la línea superior de la pantalla aparezca un valor entre P90.0 y P95.0.
8. Verifique nuevamente todo el margen de ajuste graduando el accionamiento con las teclas y , y lléveloa su posición final. La tensión del potenciómetro debe permanecer ahora entre P5.0 a P95.0. Si ésto aúnno se logra, ajuste el acoplamiento a fricción (8, fig. 3) de la siguiente manera: Lleve el accionamiento a suposición final oprimiendo la tecla . Ahora ajuste el acoplamiento a fricción hasta que en la línea superiorde la pantalla aparezca un valor entre P5.0 y P10.0.
9. Coloque el accionamiento de tal manera que el brazo de palanca se encuentre en posición horizontal. Lapantalla debe indicar un valor entre P48.0 y P52.0. De lo contrario, ajuste el acoplamiento a fricción (8, fig. 3)hasta que con el brazo de palanca en posición horizontal la pantalla indique ”P50.0”. Entre más exacto seaeste valor, más exacto puede determinar el posicionador la carrera.
7.1.1 Inicialización de accionamientos lineales
Cuando el accionamiento se pueda graduar correctamente, colóquelo en una posición media y comience la inicia-lización automática:
1. Oprima la tecla del modo de operación por más de 5 s. Con ello se accede al modo de operaciónConfigurar.Indicación:
2. Conmute al segundo parámetro oprimiendo por corto tiempo la tecla del modo de operación . Indicación: ó
Nota
Este valor debe coincidir con el valor ajustado para el conmutador de la transmisión del engranaje(7, hoja plegada ”Operación – instrucciones breves”) (33° ó 90°).
3. Continue con la tecla del modo de operación : Indicación:
Este parámetro se ajusta únicamente si se desea que la carrera total determinada sea indicada en mm, alterminar la fase de inicialización. Para ello se debe seleccionar el mismo valor que el ajustado en la escaladel brazo de palanca donde se ha posicionado el bulón de arrastre.
4. Continue con la tecla del modo de operación :Indicación:
5. Comience la inicialización oprimiendo la tecla por más de 5 s. Indicación:
Durante el proceso de inicialización aparacen en la línea inferior las indicaciones ”RUN1” a ”RUN5”.
Nota
El proceso de inicialización depende del accionamiento y puede durar hasta 15 min.
El proceso de inicialización ha terminado cuando aparezca la siguiente indicación:
Al oprimir por corto tiempo la tecla del modo de operación aparece la siguiente indicación:
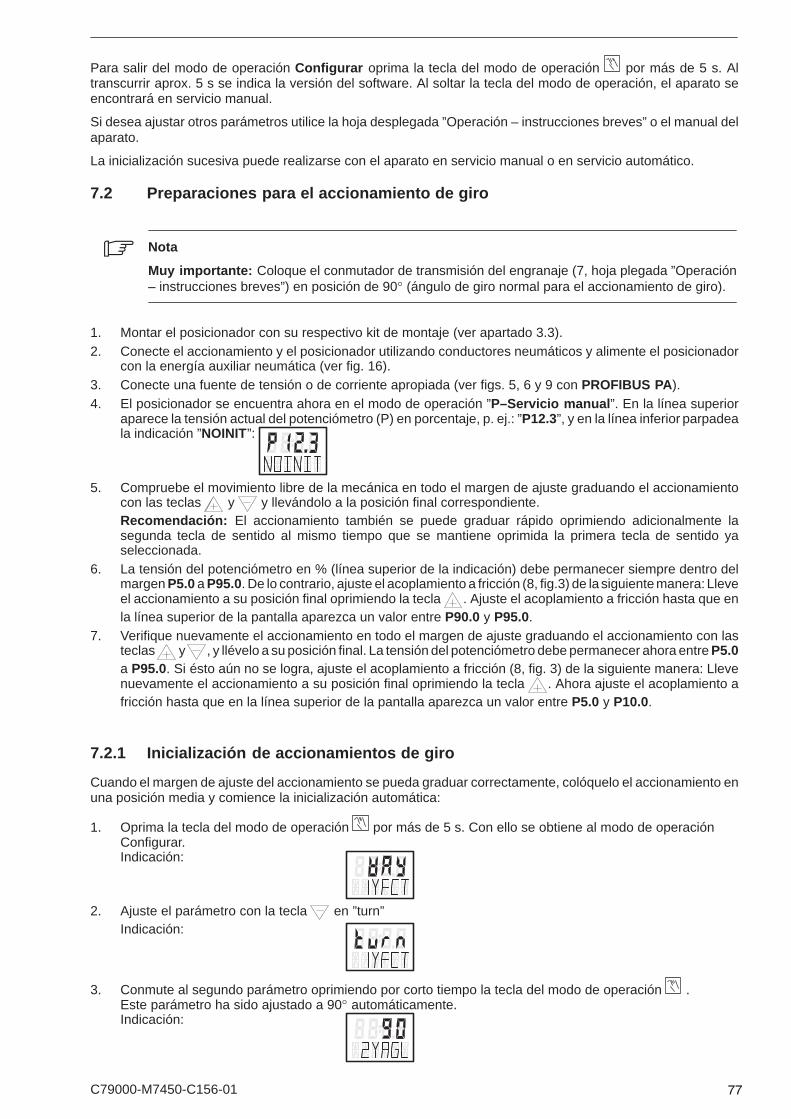
C79000-M7450-C156-01
Para salir del modo de operación Configurar oprima la tecla del modo de operación por más de 5 s. Altranscurrir aprox. 5 s se indica la versión del software. Al soltar la tecla del modo de operación, el aparato seencontrará en servicio manual.
Si desea ajustar otros parámetros utilice la hoja desplegada ”Operación – instrucciones breves” o el manual delaparato.
La inicialización sucesiva puede realizarse con el aparato en servicio manual o en servicio automático.
7.2 Preparaciones para el accionamiento de giro
Nota
Muy importante: Coloque el conmutador de transmisión del engranaje (7, hoja plegada ”Operación– instrucciones breves”) en posición de 90° (ángulo de giro normal para el accionamiento de giro).
1. Montar el posicionador con su respectivo kit de montaje (ver apartado 3.3).2. Conecte el accionamiento y el posicionador utilizando conductores neumáticos y alimente el posicionador
con la energía auxiliar neumática (ver fig. 16).3. Conecte una fuente de tensión o de corriente apropiada (ver figs. 5, 6 y 9 con PROFIBUS PA).4. El posicionador se encuentra ahora en el modo de operación ”P–Servicio manual”. En la línea superior
aparece la tensión actual del potenciómetro (P) en porcentaje, p. ej.: ”P12.3”, y en la línea inferior parpadeala indicación ”NOINIT”:
5. Compruebe el movimiento libre de la mecánica en todo el margen de ajuste graduando el accionamientocon las teclas y y llevándolo a la posición final correspondiente.Recomendación: El accionamiento también se puede graduar rápido oprimiendo adicionalmente lasegunda tecla de sentido al mismo tiempo que se mantiene oprimida la primera tecla de sentido yaseleccionada.
6. La tensión del potenciómetro en % (línea superior de la indicación) debe permanecer siempre dentro delmargen P5.0 a P95.0. De lo contrario, ajuste el acoplamiento a fricción (8, fig.3) de la siguiente manera: Lleveel accionamiento a su posición final oprimiendo la tecla . Ajuste el acoplamiento a fricción hasta que enla línea superior de la pantalla aparezca un valor entre P90.0 y P95.0.
7. Verifique nuevamente el accionamiento en todo el margen de ajuste graduando el accionamiento con lasteclas y , y llévelo a su posición final. La tensión del potenciómetro debe permanecer ahora entre P5.0a P95.0. Si ésto aún no se logra, ajuste el acoplamiento a fricción (8, fig. 3) de la siguiente manera: Llevenuevamente el accionamiento a su posición final oprimiendo la tecla . Ahora ajuste el acoplamiento africción hasta que en la línea superior de la pantalla aparezca un valor entre P5.0 y P10.0.
7.2.1 Inicialización de accionamientos de giro
Cuando el margen de ajuste del accionamiento se pueda graduar correctamente, colóquelo el accionamiento enuna posición media y comience la inicialización automática:
1. Oprima la tecla del modo de operación por más de 5 s. Con ello se obtiene al modo de operaciónConfigurar.Indicación:
2. Ajuste el parámetro con la tecla en ”turn” Indicación:
3. Conmute al segundo parámetro oprimiendo por corto tiempo la tecla del modo de operación . Este parámetro ha sido ajustado a 90° automáticamente.Indicación:

C79000-M7450-C156-01
4. Continue con la tecla del modo de operación : Indicación:
5. Comience la inicialización oprimiendo la tecla por más de 5 s. Indicación:
Durante el proceso de inicialización aparacen en la línea inferior las indicaciones ”RUN1” a ”RUN5”.
Nota
El proceso de inicialización depende del accionamiento y puede durar hasta 15 min.
El proceso de inicialización ha terminado cuando aparezca la siguiente indicación:
El valor de arriba indica el ángulo de giro completo del accionamiento (ejemplo 93,5°).
Al oprimir por corto tiempo la tecla del modo de operación aparece la siguiente indicación:
Para salir del modo de operación Configurar oprima la tecla del modo de operación por más de 5 s. Altranscurrir aprox. 5 s se indica la versión del software. Al soltar la tecla del modo de operación, el aparato se en-contrará en servicio manual.
Si desea ajustar otros parámetros utilice la hoja desplegada ”Operación – instrucciones breves” o el manual delaparato.
La inicialización sucesiva puede realizarse con el aparato en servicio manual o en servicio automático.
8 Conformidad
El posicionador SIPART PS2 sin PROFIBUS PA con sus opciones correspondientes está aprobado normalmentepara el funcionamiento en la zona 1 como EEx ib (véase certificado de examen de tipo CE PTB 97 ATEX 2155)y en la zona 2 como Ex n (véase declaración de conformidad TÜV 97 ATEX 1212).
Para el uso en la zona 2 deben cumplirse los siguientes requisitos:
Para el posicionador y las opciones empleadas deben utilizarse rótulos especiales. Dichos rótulos pueden solicitarse como juego completo (contiene 5 piezas) bajo el número de pedido
C73451–A430–D55. El uso en la zona 2 debe marcarse cubriendo (cancelando) el rótulo estándar EEx ib con el rótulo
correspondiente Ex n.
!Precaución
Al utilizar el posicionador y sus opciones en la zona 2 puede presentarse un fallo que sobrepasa losvalores de cresta del servicio normal. Debido a ello, dicho aparato Ex n y sus opciones no debenser empleados nunca más en la zona 1.
La certificación FMRC (Factory Mutual Research Corporation) se encuentra también bajo el nº 6D6A0.AX.

C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
t
Bra
un
sch
wei
g u
nd
Ber
lin
(1)
Cer
tifi
cad
o d
e ex
amen
de
tip
o C
E
(Tra
ducc
ión)
(2)
Equ
ipos
y s
iste
mas
pro
tect
ores
par
a el
uso
ade
cuad
o en
áre
as p
oten
cial
men
te e
xplo
siva
s D
irec
tiva
94/
9/C
E
(3)
Nº
del c
ertif
icad
o de
exa
men
de
tipo
CE
:
PT
B 9
7 A
TE
X 2
155
(4)
Equ
ipo:
Pos
icio
nado
r SIP
AR
T P
S ti
po 6
DR
400*
-*E
con
opc
ione
s
(5)
Fab
rican
te:
Sie
men
s A
G, A
utom
atis
ieru
ngst
echn
ik
(6)
Dire
cció
n:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
(7)
La c
onst
rucc
ión
del e
quip
o y
las
vers
ione
s ad
mis
ible
s es
tán
espe
cific
adas
en
el a
nexo
del
cer
tific
ado
de e
xam
en.
(8)
El P
hysi
kalis
ch-T
echn
isch
e B
unde
sans
talt
com
o or
gani
smo
ofic
ial n
º 010
2 ce
rtifi
ca s
egún
el a
rtíc
ulo
9 de
la D
irect
iva
94/9
/CE
del
Con
sejo
de
la C
omun
idad
Eur
opea
, de
23 d
e m
arzo
de
1994
, el c
umpl
imie
nto
de to
dos
los
requ
isito
ses
enci
ales
de
segu
ridad
y s
anid
ad re
fere
ntes
al d
iseñ
o y
cons
truc
ción
de
equi
pos
y si
stem
as p
rote
ctor
es p
ara
el u
soad
ecua
do e
n ár
eas
pote
ncia
lmen
te e
xplo
siva
s, s
egún
el a
nexo
II d
e la
Dire
ctiv
a.
Los
resu
ltado
s de
la p
rueb
a es
tán
espe
cific
ados
en
el c
ertif
icad
o de
pru
eba
conf
iden
cial
PT
B E
x 97
-271
96.
(9)
Los
requ
isito
s es
enci
ales
de
segu
ridad
y s
anid
ad s
e cu
mpl
en c
onfo
rme
a la
s no
rmas
DIN
EN
500
14:1
994-
03D
IN E
N 5
0020
:199
6-04
(10)
Una
”X” d
etrá
s de
l núm
ero
de c
ertif
icad
o in
dica
que
en
el a
nexo
de
este
cer
tific
ado
se h
an e
spec
ifica
do c
ondi
cion
eses
peci
ales
par
a el
uso
seg
uro
del a
para
to.
(11)
Est
e ce
rtifi
cado
de
exam
en d
e tip
o C
E s
e re
fiere
sol
amen
te a
l dis
eño
y co
nstr
ucci
ón d
el a
para
to e
spec
ifica
do s
egún
la D
irect
iva
94/9
/CE
. Par
a la
fabr
icac
ión
y co
mer
cial
izac
ión
del e
quip
o va
len
otro
s re
quis
itos
de d
icha
Dire
ctiv
a.
(12)
La m
arca
del
apa
rato
deb
e co
nten
er la
s si
guie
ntes
esp
ecifi
caci
ones
:
II 2
G
EE
x ib
IIC
T6
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
19.
08.1
997
p. p
.
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
Pág
ina
1/4
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
(13)
An
exo
(14)
Cer
tifi
cad
o d
e ex
amen
de
tip
o C
E P
TB
97
AT
EX
215
5(1
5)D
escr
ipci
ón d
el e
quip
o
El p
osic
iona
dor S
IPA
RT
PS
tipo
6D
R40
0*–*
E s
e ut
iliza
com
o m
ódul
o de
aco
plam
ient
o en
tre
los
regu
lado
res
eléc
tric
oso
los
equi
pos
de c
ontr
ol y
los
actu
ador
es n
eum
átic
os.
A c
ontin
uaci
ón u
na t
abla
con
los
ran
gos
de l
a te
mpe
ratu
ra a
mbi
ente
adm
isib
le d
epen
dien
tes
de l
a cl
ase
dete
mpe
ratu
ra: Cla
se d
e te
mpe
ratu
raR
ango
tem
pera
tura
am
bien
te
T6
–30
°C a
+50
°C
T5
–30
°C a
+65
°C
T4
–30
°C a
+80
°C
Dat
os e
léct
ricos
Ap
arat
o b
ásic
o
Circ
uito
a 2
hilo
s
Alim
enta
ción
y c
ircui
to d
eco
ntro
l con
ecta
dos
en s
erie
, 4 a
20 m
A(b
orna
s 3
y 7/
8;pu
ente
s en
los
born
as 1
–2 y
4/5–
6)
En
tipo
de p
rote
cció
n co
n se
gurid
ad in
trín
seca
EE
x ib
IIC
sól
o pa
ra c
onec
tar
circ
uito
s in
trín
seco
s ce
rtifi
cado
s co
n lo
s si
guie
ntes
val
ores
máx
imos
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
idad
inte
rna
efec
tiva
Ci =
12,
1 nF
Indu
ctan
cia
inte
rna
efec
tiva
L i =
0,2
2 m
H
Circ
uito
a 3
/4 h
ilos
Alim
enta
ción
y c
ircui
to d
eco
ntro
l sep
arad
osel
éctr
icam
ente
o
con
punt
o co
mún
(bor
nas
4/5=
7/8)
Tens
ión
deal
imen
taci
ón 1
8 a
30 V
(bor
nas
3 y
4/5)
Cor
rient
e de
cont
rol 4
a 2
0 m
A(b
orna
s 6
y 7/
8)
En
tipo
de p
rote
cció
n co
n se
gurid
ad in
trín
seca
EE
x ib
IIC
sól
o pa
raco
nect
ar c
ircui
tos
intr
ínse
cos
cert
ifica
dos
con
los
sigu
ient
es v
alor
es m
áxim
os:
Ui
=
30 V
I i=
100
mA
Pi
=
1 W
Cap
acid
ad in
tern
a ef
ectiv
aC
i = 1
9 nF
Indu
ctan
cia
inte
rna
efec
tiva
L i =
0,1
1 m
H(p
or c
ircui
to)
Pág
ina
2/4

C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
Circ
uito
de
entr
ada
bina
ria(b
orna
s 9
y 10
)C
on p
uent
e o
cone
xión
con
el c
onta
cto
deco
nmut
ació
n
Op
cio
nes
Mód
ulo
HA
RT
tipo
6D
R40
04–6
HIn
sert
ado
en e
l laz
o de
l circ
uito
de
cont
rol
(bor
nas
6 y
7/8)
Mód
ulo
de a
larm
a tip
o 6D
R40
04–6
A
Circ
uito
s de
sal
idas
bin
aria
s(b
orna
s 51
y 5
2,ó
41 y
42,
ó 31
y 3
2)
En
tipo
de p
rote
cció
n co
n se
gurid
ad in
trín
seca
E
Ex
ib II
C s
ólo
para
con
ecta
r ci
rcui
tos
intr
ínse
cos
cert
ifica
dos
con
los
sigu
ient
es v
alor
es m
áxim
os:
Ui
=
30 V
Cap
acid
ad in
tern
a ef
ectiv
a C
i = 5
,2 n
FLa
indu
ctan
cia
inte
rna
efec
tiva
es d
espr
ecia
ble
(por
circ
uito
)
Circ
uito
de
entr
ada
bina
ria(b
orna
s 11
y 1
2)E
n tip
o de
pro
tecc
ión
con
segu
ridad
intr
ínse
ca
EE
x ib
IIC
sól
o pa
ra c
onec
tar
circ
uito
s in
trín
seco
sce
rtifi
cado
s co
n lo
s si
guie
ntes
val
ores
máx
imos
:U
i=
30
VLa
cap
acid
ad in
tern
a ef
ectiv
a es
des
prec
iabl
eLa
indu
ctan
cia
inte
rna
efec
tiva
es d
espr
ecia
ble
Circ
uit d
’ent
rée
TO
R(b
orne
s 21
et 2
2)C
aval
ier o
u ra
ccor
dem
ent à
un
cont
act d
eco
mm
utat
ion
Mód
ulo
Iy ti
po 6
DR
4004
–6J
Circ
uito
de
salid
a, 4
a 2
0 m
A(b
orna
s 61
y 6
2)E
n tip
o de
pro
tecc
ión
con
segu
ridad
intr
ínse
ca
EE
x ib
IIC
sól
o pa
ra c
onec
tar
circ
uito
s in
trín
seco
sce
rtifi
cado
s co
n lo
s si
guie
ntes
val
ores
máx
imos
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
idad
inte
rna
efec
tiva
Ci =
11
nFIn
duct
anci
a in
tern
a ef
ectiv
aL i
= 0
,22
mH
(16)
Cer
tific
ado
de p
rueb
a P
TB
Ex
97-2
7196
Pág
ina
3/4
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
(17)
Con
dici
ones
esp
ecia
les
No
aplic
able
s
(18)
Req
uisi
tos
esen
cial
es d
e se
gurid
ad y
san
idad
Cum
plid
os p
or la
s no
rmas
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
19.
08.1
997
P. p
.
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
Pág
ina
4/4

C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
raun
schw
eig
und
Ber
lin
1. S
up
lem
ento
cu
mp
lien
do
la D
irec
tiva
94/
9/C
E A
nex
o II
I Cif
ra 6
par
a el
cer
tifi
cad
o d
e ex
amen
de
tip
o C
E P
TB
97
AT
EX
215
5
Equ
ipo:
Pos
icio
nado
r SIP
AR
T P
S ti
po 6
DR
400*
-*E
con
opc
ione
s
Fab
rican
te:
Sie
men
s A
G
Ant
igua
men
te:
Sie
men
s A
G, A
utom
atis
ieru
ngst
echn
ik
Dire
cció
n:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
Des
crip
ción
de
los
supl
emen
tos
y la
s m
odifi
caci
ones
El p
osic
iona
dor S
IPA
RT
PS
tipo
6D
R40
0*—
*E c
on o
pcio
nes
pued
e se
r fab
ricad
o de
acu
erdo
a lo
s do
cum
ento
s de
pru
eba
nom
brad
o en
el c
ertif
icad
o de
pru
eba.
Las
mod
ifica
cion
es s
e re
fiere
n a
la e
stru
ctur
a in
tern
a y
la d
enom
inac
ión
del t
ipo
deap
arat
o. E
ste
se d
enom
inar
V e
n el
futu
ro: P
osic
iona
dor S
IPA
RT
PS
2 tip
o 6D
R40
0*—
*E c
on o
pcio
nes.
Los
dat
os e
lÈct
ricos
y la
s de
mV
s es
peci
ficac
ione
s no
se
alte
ran.
Cer
tific
ado
de p
rueb
a P
TB
EX
97-
2735
1
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
05.
01.1
998
P. p
.
Dr.-
Ing.
U. J
ohan
nsm
eyer
Reg
ieru
ngsd
irekt
or
Pág
ina
1/1
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
rau
nsc
hw
eig
un
d B
erlin
2. S
up
lem
ento
c
um
plie
nd
o la
Dir
ecti
va 9
4/9/
CE
An
exo
III C
ifra
6
p
ara
el c
erti
fica
do
de
exam
en d
e ti
po
CE
PT
B 9
7 A
TE
X 2
155
Equ
ipo:
Pos
icio
nado
r SIP
AR
T P
S ti
po 6
DR
400*
-*E
Mar
cado
II 2
G E
Ex
ib II
C T
6 ó
EE
x ia
IIC
T6
Fab
rican
te:
Sie
men
s A
G, A
utom
atis
ieru
ngst
echn
ik
Dire
cció
n:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
Des
crip
ción
de
los
supl
emen
tos
y la
s m
odifi
caci
ones
El p
osic
iona
dor
SIP
AR
T P
S t
ipo
6DR
400*
–*E
ha
sido
am
plia
do e
n el
tip
o 6D
R41
0*–*
E; s
u fa
bric
ació
n es
tá a
utor
izad
aba
sánd
ose
en lo
s do
cum
ento
s qu
e fig
uran
en
el s
igui
ente
cer
tific
ado
de p
rueb
a.
Las
mod
ifica
cion
es fu
eron
real
izad
as e
n la
est
ruct
ura
inte
rna,
los
”Dat
os e
léct
ricos
” y e
l tip
o de
pro
tecc
ión
del a
para
to. P
ara
la v
ersi
ón m
odifi
cada
el t
ipo
de p
rote
cció
n de
l apa
rato
es
II 2
G E
Ex
ia II
C T
6.
Dat
os e
léct
ricos
Ap
arat
o b
ásic
o
Alim
enta
ción
/circ
uito
de
la s
eñal
de
salid
a P
RO
FIB
US
–P
A (
born
as 7
y 3
)E
n tip
o de
pro
tecc
ión
con
segu
ridad
intr
ínse
ca
EE
x ia
IIC
oE
Ex
ib II
C,
!
"#
$%
$
&
'
(
EE
x ib
IIC
(
EE
x ib
IIB
(
EE
x ia
IIC
Bar
rera
EE
x ia
IIC
o E
Ex
ib II
C
Car
acte
ríst
ica
rect
angu
lar
rect
angu
lar
trap
ezoi
dal
linea
l
Tens
ión
17,5
V17
,5 V
17,5
V24
V
Inte
nsid
ad12
8 m
A28
0 m
A21
5 m
A20
0 m
A
Pot
enci
a1,
8 W
4,2
W1,
8 W
1,2
W
L i =
8
H
Ci
des
prec
iabl
e
Pág
ina
1/3

) C79000-M7450-C156-01
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
rau
nsc
hw
eig
un
d B
erlin
2. S
up
lem
ento
par
a el
cer
tifi
cad
o d
e ex
amen
de
tip
o C
E P
TB
97
AT
EX
215
5
Op
cio
nes
Mód
ulo
de a
larm
a tip
o 6D
R40
04–6
A
Circ
uito
s de
sal
idas
bin
aria
s(b
orna
s 51
y 5
2,ó
41 y
42,
ó 31
y 3
2)
En
tipo
de p
rote
cció
n co
n se
gurid
ad in
trín
seca
EE
x ia
IIC s
ólo
para
con
ecta
r circ
uito
s in
trín
seco
s ce
rtifi
cado
s co
n lo
s si
guie
ntes
val
ores
máx
imos
:U
i=
30
VC
i=
5,2
nF
L i d
espr
ecia
ble
Circ
uito
de
entr
ada
bina
ria(b
orna
s 11
y 1
2)E
n tip
o de
pro
tecc
ión
con
segu
ridad
intr
ínse
ca E
Ex
ibIIC
sól
o pa
ra c
onec
tar c
ircui
tos
intr
ínse
cos
cert
ifica
dos
con
los
sigu
ient
es v
alor
es m
áxim
os:
Ui
=
30 V
Ci d
espr
ecia
ble
L i d
espr
ecia
ble
Circ
uito
de
entr
ada
bina
ria(b
orna
s 21
y 2
2)C
on p
uent
e o
cone
xión
con
el c
onta
cto
de c
onm
utac
ión
Mód
ulo
Iy ti
po 6
DR
4004
–6J
Circ
uito
de
salid
a, 4
a 2
0 m
A(b
orna
s 61
y 6
2)E
n tip
o de
pro
tecc
ión
con
segu
ridad
intr
ínse
ca E
Ex
ibIIC
sól
o pa
ra c
onec
tar c
ircui
tos
intr
ínse
cos
cert
ifica
dos
con
los
sigu
ient
es v
alor
es m
áxim
os:
Ui
= 3
0 V
I i=
100
mA
Pi
= 1
WC
i =
11
nFL i
=
0,2
2 m
H
La s
epar
ació
n el
éctr
ica
de lo
s ci
rcui
tos
de s
alid
a di
gita
l (m
ódul
o de
ala
rma)
ent
re s
í y lo
s de
más
circ
uito
s es
tá a
segu
rada
hast
a un
a te
nsió
n de
cre
sta
de 3
0 V
. La
sepa
raci
ón e
léct
rica
del c
ircui
to d
e sa
lida
(mód
ulo
Iy) y
el c
ircui
to d
e en
trad
a di
gita
l(m
ódul
o de
ala
rma)
con
los
dem
ás c
ircui
tos
está
ase
gura
da h
asta
una
tens
ión
de c
rest
a de
30
V.
Los
dem
ás d
atos
per
man
ecen
inal
tera
dos.
Cer
tific
ado
de p
rueb
a P
TB
EX
98-
2836
5
Pág
ina
2/3
Ph
ysik
alis
ch-T
ech
nis
che
Bu
nd
esan
stal
tB
rau
nsc
hw
eig
un
d B
erlin
2. S
up
lem
end
o p
ara
el c
erti
fica
do
de
exam
en d
e ti
po
CE
PT
B 9
7 A
TE
X 2
155
Con
dici
ones
esp
ecia
les
No
aplic
able
s
Zer
tifiz
ieru
ngss
telle
Exp
losi
onss
chut
zB
raun
schw
eig,
29.
Okt
ober
199
8
P. p
.
Dr.-
Ing.
U. J
ohan
nsm
eyer
Obe
rreg
ieru
ngsr
at
Pág
ina
3/3

C79000-M7450-C156-01 *
TÜ
V
CE
RT
(1)
Dec
lara
ció
n d
e co
nfo
rmid
ad
(Tra
ducc
ión)
(2)
Equ
ipos
y s
iste
mas
pro
tect
ores
par
a el
uso
ade
cuad
o en
ár
eas
pote
ncia
lmen
te e
xplo
siva
s - D
irec
tiva
94/
9/C
E
(3)
Nº
del c
ertif
icad
o de
exa
men
:
TÜ
V 9
7 A
TE
X 1
212
(4)
Equ
ipo:
Pos
icio
nado
r SIP
AR
T P
S ti
po 6
DR
400*
-*E
con
opc
ione
s
(5)
Fab
rican
te:
Sie
men
s A
G, A
utom
atis
ieru
ngst
echn
ik
(6)
Dire
cció
n:S
iem
ensa
llee
84, D
-761
87 K
arls
ruhe
(7)
La c
onst
rucc
ión
del e
quip
o y
las
vers
ione
s ad
mis
ible
s es
tán
espe
cific
adas
en
el a
nexo
del
cer
tific
ado
de e
xam
en.
(8)
El
TÜ
V H
anno
ver/
Sac
hsen
–Anh
alt
e. V
., T
ÜV
CE
RT-
Zer
tifiz
ieru
ngst
elle
com
o or
gani
smo
ofic
ial n
º 00
32 c
ertif
ica
segú
n el
art
ícul
o 9
de la
Dire
ctiv
a 94
/9/C
E d
el C
onse
jo d
e la
Com
unid
ad E
urop
ea, d
e 23
de
mar
zo d
e 19
94, e
l cum
pli-
mie
nto
de to
dos
los
requ
isito
s es
enci
ales
de
segu
ridad
y s
anid
ad r
efer
ente
s al
dis
eño
y co
nstr
ucci
ón d
e eq
uipo
s y
sist
emas
pro
tect
ores
par
a el
uso
ade
cuad
o en
áre
as p
oten
cial
men
te e
xplo
siva
s, s
egún
el a
nexo
II d
e la
Dire
ctiv
a.
Los
resu
ltado
s de
la p
rueb
a es
tán
espe
cific
ados
en
el c
ertif
icad
o de
pru
eba
conf
iden
cial
nº
044/
97/7
003.
(9)
Los
requ
isito
s es
enci
ales
de
segu
ridad
y s
anid
ad s
e cu
mpl
en c
onfo
rme
las
norm
as
E D
IN E
N 5
0 02
1: 1
997-
02 (p
rEN
50
021:
199
6-10
)
(10)
Una
”X” d
etrá
s de
l núm
ero
de c
ertif
icad
o in
dica
que
en
el a
nexo
de
este
cer
tific
ado
se h
an e
spec
ifica
do c
ondi
cion
eses
peci
ales
par
a el
uso
seg
uro
del a
para
to.
(11)
Est
a de
clar
ació
n de
con
form
idad
se
refie
re s
olam
ente
al d
iseñ
o y
cons
truc
ción
del
apa
rato
esp
ecifi
cado
seg
ún la
Di-
rect
iva
94/9
/CE
. Par
a la
fabr
icac
ión
y co
mer
cial
izac
ión
del e
quip
o va
len
otro
s re
quis
itos
de d
icha
Dire
ctiv
a.
(12)
La m
arca
del
apa
rato
deb
e co
nten
er la
s si
guie
ntes
esp
ecifi
caci
ones
:
II 3
G
Ex
nV
II T
4
TÜ
V H
anno
ver/
Sac
hsen
-Anh
alt
e.V.
Han
nove
r, 19
97-0
8-28
TÜ
V C
ER
T-Z
ertif
izie
rung
sste
lleA
m T
ÜV
1D
-305
19 H
anno
ver
Der
Lei
ter
Pág
ina
1/3
TÜ
V H
ann
ove
r/S
ach
sen
-An
hal
t e.
V.
(13)
An
exo
(14)
Dec
lara
ció
n d
e co
nfo
rmid
ad n
º T
ÜV
97
AT
EX
121
2(1
5)D
escr
ipci
ón d
el e
quip
o
El p
osic
iona
dor S
IPA
RT
PS
tipo
6D
R40
0*–*
E s
e ut
iliza
com
o m
ódul
o de
aco
plam
ient
o en
tre
los
regu
lado
res
eléc
tric
oso
los
equi
pos
de c
ontr
ol y
los
actu
ador
es n
eum
átic
os.
El r
ango
de
la te
mpe
ratu
ra a
mbi
ente
adm
isib
le e
s de
–30
°C a
+80
°C
.
Dat
os e
léct
ricos
Ap
arat
o b
ásic
o
Circ
uito
a 2
hilo
s
Alim
enta
ción
y c
ircui
to d
e co
ntro
l co
nect
ados
en
serie
, 4 a
20
mA
(bor
nas
3 y
7/8;
puen
tes
en lo
s bo
rnas
1–2
y 4
/5–6
)
Par
a la
con
exió
n de
circ
uito
s co
n lo
s si
guie
ntes
valo
res
máx
imos
en
serv
icio
nor
mal
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
idad
inte
rna
efec
tiva
Ci =
12,
1 nF
Indu
ctan
cia
inte
rna
efec
tiva
L i =
0,2
2 m
H
Circ
uito
a 3
/4 h
ilos
Alim
enta
ción
y c
ircui
to d
e co
ntro
l se
para
dos
eléc
tric
amen
te
o co
n pu
nto
com
ún(b
orna
s 4/
5=7/
8)Te
nsió
n de
alim
enta
ción
18
a 30
V(b
orna
s 3
y 4/
5)C
orrie
nte
de c
ontr
ol 4
a 2
0 m
A(b
orna
s 6
y 7/
8)
Par
a la
con
exió
n de
circ
uito
s co
n lo
s si
guie
ntes
val
ores
máx
imos
en
serv
icio
nor
mal
:U
i=
30
VI i
= 1
00 m
AP
i=
1
WC
apac
idad
inte
rna
efec
tiva
Ci
19
nFIn
duct
anci
a in
tern
a ef
ectiv
a L i
0
,11
mH
(por
circ
uito
)
Circ
uito
de
entr
ada
bina
ria(b
orna
s 9
y 10
)C
on p
uent
e o
cone
xión
con
el c
onta
cto
de c
onm
utac
ión
Op
cio
nes
Mód
ulo
HA
RT
tipo
6D
R40
04–6
HIn
sert
ado
en e
l laz
o de
l circ
uito
de
cont
rol (
born
as 6
y 7
/8)
Mód
ulo
de a
larm
a tip
o 6D
R40
04–6
A
Circ
uito
s de
sal
idas
bin
aria
s(b
orna
s 51
y 5
2,ó
41 y
42,
ó 31
y 3
2)
Par
a la
con
exió
n de
circ
uito
s co
n lo
s si
guie
ntes
val
ores
máx
imos
en
serv
icio
nor
mal
:U
i=
30
VC
apac
idad
inte
rna
efec
tiva
Ci =
5,2
nF
La in
duct
anci
a in
tern
a ef
ectiv
a es
des
prec
iabl
e(p
or c
ircui
to)
Pág
ina
2/3

+ C79000-M7450-C156-01
TÜ
V H
ann
ove
r/S
ach
sen
-An
hal
t e.
V.A
nex
o
Dec
lara
ció
n d
e co
nfo
rmid
ad n
º T
ÜV
97
AT
EX
121
2
Circ
uito
de
entr
ada
bina
ria(b
orna
s 11
y 1
2)P
ara
la c
onex
ión
de c
ircui
tos
con
los
sigu
ient
es v
alor
esm
áxim
os e
n se
rvic
io n
orm
al:
Ui
=
30 V
La c
apac
idad
inte
rna
efec
tiva
es d
espr
ecia
ble
La in
duct
anci
a in
tern
a ef
ectiv
a es
des
prec
iabl
e
Circ
uito
de
entr
ada
bina
ria(b
orna
s 21
y 2
2)C
on p
uent
e o
cone
xión
con
el c
onta
cto
deco
nmut
ació
n
Mód
ulo
Iy ti
po 6
DR
4004
–6J
Circ
uito
de
salid
a, 4
a 2
0 m
A(b
orna
s 61
y 6
2)P
ara
la c
onex
ión
de c
ircui
tos
con
los
sigu
ient
es v
alor
esm
áxim
os e
n se
rvic
io n
orm
al:
Ui
=
30 V
I i=
100
mA
Pi
=
1 W
Cap
acid
ad in
tern
a ef
ectiv
a C
i = 1
1 nF
Indu
ctan
cia
inte
rna
efec
tiva
Li =
0,2
2 m
H
(16)
Los
docu
men
tos
de p
rueb
a fig
uran
en
el c
ertif
icad
o de
pru
eba
nº P
TB
EX
044
/97/
7003
(17)
Con
dici
ones
esp
ecia
les
ning
una
(18)
Req
uisi
tos
esen
cial
es d
e se
gurid
ad y
san
idad
ning
uno
Pág
ina
3/3

C79000-M7450-C156-01
Dec
lara
ció
n d
e co
nfo
rmid
ad C
E
Nº
PS
2–E
x1
(Tra
ducc
ión)
Fab
rican
te:
Sie
men
s A
ktie
nges
ells
chaf
tB
erei
ch A
utom
atis
ieru
ngst
echn
ikG
esch
äfts
gebi
et M
eß-u
nd P
rüfte
chni
k, P
roze
ßau
tom
atis
ieru
ng
Dire
cció
n:S
iem
ensa
llee
84D
-761
87 K
arls
ruhe
Bun
desr
epub
lik D
euts
chla
nd
Des
igna
ción
del
pro
duct
o:P
osic
iona
dor e
lect
rone
umát
ico
SIP
AR
T P
S2,
6DR
400*
-*E
con
los
mód
ulos
:m
ódul
o H
AR
T6D
R40
04-6
Hm
ódul
o de
ala
rma
6DR
4004
-6A
mód
ulo
I y6D
R40
04-6
J
El p
rod
uct
o in
dic
ado
cu
mp
le lo
s re
qu
isit
os
de
las
sig
uie
nte
s D
irec
tiva
s eu
rop
eas:
94/9
/CE
ED
irect
iva
del C
onse
jo r
elat
iva
a la
apr
oxim
ació
n de
las
legi
slac
ione
s de
los
Est
ados
mie
mbr
os r
elac
iona
da a
los
equi
pos
y si
stem
as p
rote
ctor
es p
ara
el u
so a
decu
ado
en á
reas
pot
enci
alm
ente
exp
losi
vas.
Par
a m
ás in
form
ació
n s
ob
re e
l cu
mp
limie
nto
de
esta
Dir
ecti
va v
éase
el a
nex
o E
x
Fija
ción
de
la m
arca
CE
: 8/1
997
Sie
men
s A
ktie
nges
ells
chaf
t
Kar
lsru
he, l
e 9.
9.97
El a
nexo
Ex
form
a pa
rte
de la
dec
lara
ción
.E
sta
decl
arac
ión
cert
ifica
el
cum
plim
ient
o de
las
Dire
ctiv
as m
enci
onad
as p
ero
no a
segu
ra l
as p
ropi
edad
es d
efin
idas
en
la l
ey d
ere
spon
sabi
lidad
del
pro
duct
o.La
s in
dica
cion
es d
e se
gurid
ad e
n la
doc
umen
taci
ón s
umin
istr
ada
debe
n te
ners
e en
cue
nta.
An
exo
Ex
Dec
lara
ció
n d
e co
nfo
rmid
ad C
EN
º P
S2–
Ex1
Des
igna
ción
del
pro
duct
o:P
osic
iona
dor e
lect
rone
umát
ico
SIP
AR
T P
S2,
6D
R40
0*-*
E c
on lo
s m
ódul
os:
mód
ulo
HA
RT
6DR
4004
-6H
mód
ulo
de a
larm
a6D
R40
04-6
Am
ódul
o I y
6DR
4004
-6J
El c
umpl
imie
nto
de la
Dire
ctiv
a 94
/9/C
EE
par
a el
pro
duct
o in
dica
do s
e co
mpr
ueba
con
las
sigu
ient
es n
orm
as e
urop
eas
arm
oniz
adas
:
Nor
mas
eur
opea
s ar
mon
izad
as:
Nº
de re
fere
ncia
Fec
ha d
e sa
lida
Nº
de re
fere
ncia
Fec
ha d
e sa
lida
DIN
EN
500
14D
IN E
N 5
0020
03/1
994
04/1
996
E D
IN E
N 5
0021
prE
N 5
0021
02/1
997
10/1
996
Nº
del c
ertif
icad
o de
exa
men
de
tipo
CE
:N
º de
l cer
tific
ado
de p
rueb
a:
PT
B 9
7 A
TE
X 2
155
(E
xib)
PT
B E
x 97
-271
96
Nº
de la
dec
lara
ción
de
conf
orm
idad
:N
º de
l cer
tific
ado
de p
rueb
a:
TÜ
V 9
7 A
TE
X 1
212
(E
xn)
044/
97/7
003
Los
docu
men
tos
técn
icos
est
án a
rchi
vado
s ba
jo e
l núm
ero:
C73
451-
A43
0-X
1-*-
22

C79000-M7450-C156-01
Dec
lara
ció
n d
e co
nfo
rmid
ad C
E
No
. 77
5.00
–10/
98
(Tra
ducc
ión)
Fab
rican
te:
Sie
men
s A
ktie
nges
ells
chaf
tB
erei
ch A
utom
atis
ieru
ngst
echn
ikG
esch
äfts
gebi
et P
roze
ßau
tom
atis
ieru
ng u
nd In
stru
men
te
Dire
cció
n:Ö
stlic
he R
hein
brüc
kens
tr. 5
0D
-761
87 K
arls
ruhe
Bun
desr
epub
lik D
euts
chla
nd
Des
igna
ción
del
pro
duct
o:P
osic
iona
dor e
lect
rone
umát
ico
SIP
AR
T P
S2
con
PR
OF
IBU
S P
A6D
R41
0*-x
x co
n lo
s m
ódul
os6D
R40
04-*
JI y
-mód
ulo
6DR
4004
-*A
mód
ulo
de a
larm
a
El p
rod
uct
o in
dic
ado
cu
mp
le lo
s re
qu
isit
os
de
las
sig
uie
nte
s D
irec
tiva
s eu
rop
eas:
89/3
36/C
EE
Dire
ctriz
del
Con
sejo
rel
ativ
a a
la a
rmon
izac
ión
de la
s le
gisl
acio
nes
de lo
s E
stad
os m
iem
bros
rel
acio
nada
con
la c
ompa
tibili
dad
elec
trom
agné
tica
mod
ifica
da p
or la
91/
263/
CE
E y
93/
68/C
EE
del
Con
sejo
.E
l ane
xo C
EM
incl
uye
más
dat
os s
obre
el c
umpl
imie
nto
de e
sta
dire
ctriz
.
Par
a m
ás in
form
ació
n s
ob
re e
l cu
mp
limie
nto
de
esta
Dir
ecti
va v
éase
el a
nex
o C
EM
Fija
ción
de
la m
arca
CE
: 10/
98
Sie
men
s A
ktie
nges
ells
chaf
t
Kar
lsru
he, l
e 30
.10.
1998
El a
nexo
CE
M fo
rma
part
e de
la d
ecla
raci
ón.
Est
a de
clar
ació
n ce
rtifi
ca e
l cum
plim
ient
o de
las
Dire
ctiv
as m
enci
onad
as p
ero
no a
segu
ra la
s pr
opie
dade
s de
finid
as e
n la
ley
de
resp
onsa
bilid
ad d
el p
rodu
cto.
Las
indi
caci
ones
de
segu
ridad
en
la d
ocum
enta
ción
sum
inis
trad
a de
ben
tene
rse
en c
uent
a.
An
exo
CE
MD
ecla
raci
ón
de
con
form
idad
CE
No
. 77
5.00
–10/
98
Des
igna
ción
del
pro
duct
o:P
osic
iona
dor e
lect
rone
umát
ico
SIP
AR
T P
S2
con
PR
OF
IBU
S P
A6D
R41
0*-x
x co
n lo
s m
ódul
os6D
R40
04-*
JI y
-mód
ulo
6DR
4004
-*A
mód
ulo
de a
larm
a
El c
umpl
imie
nto
de la
Dire
ctiv
a 89
/336
/CE
E p
ara
el p
rodu
cto
indi
cado
se
com
prue
ba c
on la
s si
guie
ntes
nor
mas
eur
opea
sar
mon
izad
as:
Nor
mes
Eur
opée
nnes
har
mon
isée
s:
Nº
de re
fere
ncia
Fec
ha d
e sa
lida
Nº
de re
fere
ncia
Fec
ha d
e sa
lida
DIN
EN
500
81 P
arte
1D
IN E
N 5
0082
Par
te 2
3/19
9319
95
Los
docu
men
tos
técn
icos
est
án a
rchi
vado
s ba
jo e
l núm
ero:
C73
451-
A43
0-X
1-*-
22
C79000-M7450-C156-01

C79000-M7450-C156-01
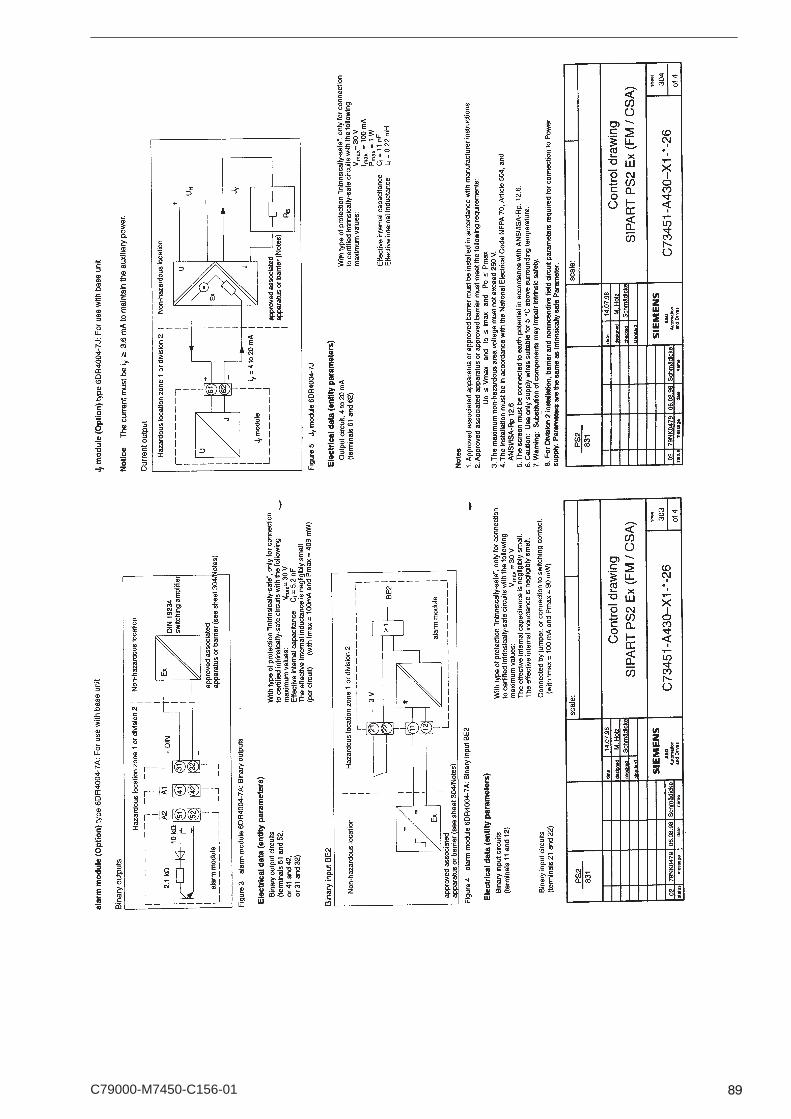
C79000-M7450-C156-01

C79000-M7450-C156-01
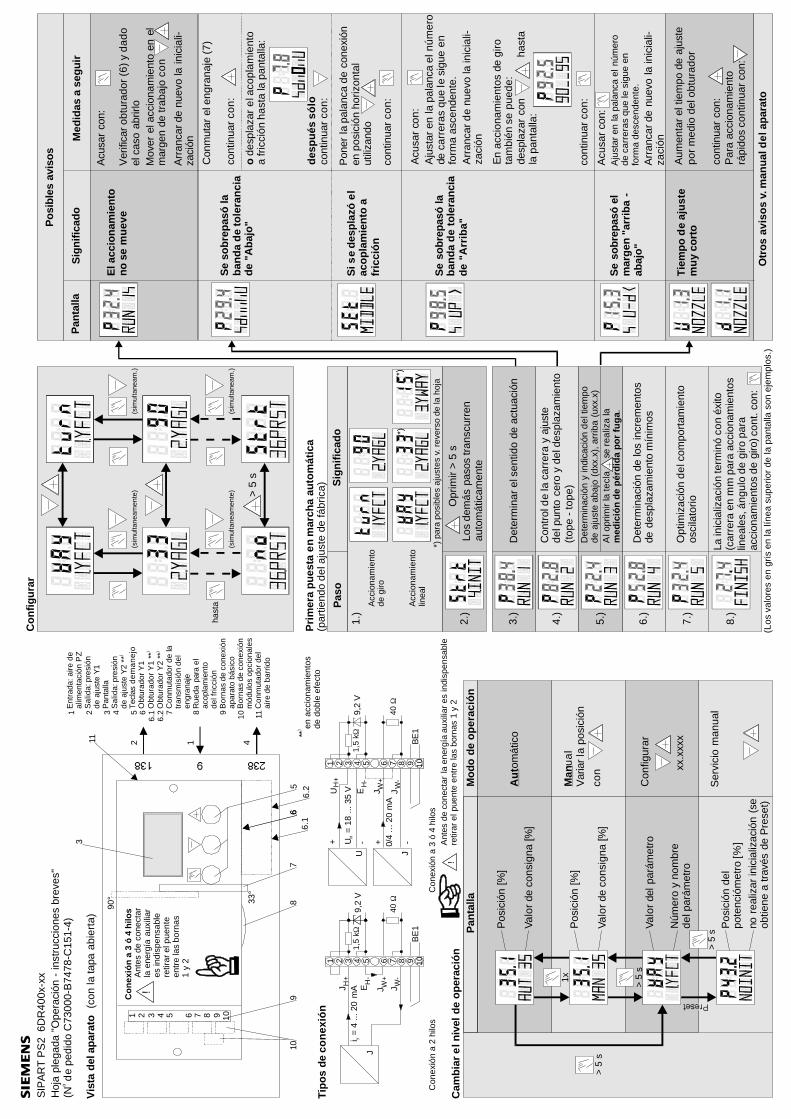
Vis
tade
lapa
rato
(con
lata
paab
iert
a)
Hoj
apl
egad
a"O
pera
ción
-in
stru
ccio
nes
brev
es"
(Nd
epe
dido
C73
000-
B74
78-C
151-
4)o
SIP
AR
TP
S2
6DR
400x
-xx
enac
cion
amie
ntos
dedo
ble
efec
to
Ent
rada
:aire
deal
imen
taci
ónP
ZS
alid
a:pr
esió
nde
ajus
teY
1P
anta
llaS
alid
a:pr
esió
nde
ajus
teY
2**
Tecl
asde
man
ejo
Obt
urad
orY
1O
btur
ador
Y1
**O
btur
ador
Y2
**C
onm
utad
orde
latr
ansm
isió
nde
len
gran
aje
Rue
dapa
rael
acop
lam
ient
ode
lfric
ción
Bor
nas
deco
nexi
ónap
arat
obá
sico
Bor
nas
deco
nexi
ónm
ódul
osop
cion
ales
Con
mut
ador
del
aire
deba
rrid
o
)
) )
1 2 3 4 5 66.
16.
2 7 8 9 10 11
**)
Cam
bia
re
lniv
elde
op
erac
ión
Tip
os
deco
nex
ión
Pos
ible
sav
isos
Pri
mer
apu
esta
enm
arch
aau
tom
átic
a(p
artie
ndo
dela
just
ede
fábr
ica)
Con
exió
na
2hi
los
J
i=
4...
20m
Ay
J H+
EH
-
J W+
W-
J
Se
sob
rep
asó
lab
and
ad
eto
lera
nci
ade
"Aba
jo"
Se
sobr
epas
óla
ban
da
de
tole
ran
cia
de"A
rrib
a"
Con
mut
arel
engr
anaj
e(7
)
cont
inua
rcon
:
Pon
erla
pala
nca
deco
nexi
ónen
posi
ción
horiz
onta
lut
iliza
ndo
Se
sobr
epas
óel
mar
gen
"arr
iba
-ab
ajo
"
En
acci
onam
ient
osde
giro
tam
bién
sepu
ede:
Con
exió
na
3ó
4hi
los
U J
0/4
...2
0m
A
U=
18...
35V
H
+ -+ -
UH
+
J W+
W-
JEH
-
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
Tie
mp
od
eaj
ust
em
uy
cort
oA
umen
tare
ltie
mpo
deaj
uste
porm
edio
delo
btur
ador
cont
inua
rco
n:
ode
spla
zar
elac
opla
mie
nto
afr
icci
ónha
sta
lapa
ntal
la:
des
pu
éssó
loco
ntin
uarc
on:
Ela
ccio
nam
ien
tono
sem
uev
eV
erifi
caro
btur
ador
(6)y
dado
elca
soab
rirlo
Sig
nifi
cad
oP
anta
llaM
edid
asa
seg
uir
Mov
erel
acci
onam
ient
oen
elm
arge
nde
trab
ajo
con
Acu
sar
con:
Acu
sarc
on:
Acu
sarc
on:
Otr
osav
iso
sv.
man
ual
del
apar
ato
cont
inua
rcon
:
cont
inua
rcon
:
Arr
anca
rde
nuev
ola
inic
iali-
zaci
ón
Arr
anca
rde
nuev
ola
inic
iali-
zaci
ón
Arr
anca
rde
nuev
ola
inic
iali-
zaci
ón
Sis
ed
esp
lazó
elac
op
lam
ien
toa
fric
ció
n
desp
laza
rco
nha
sta
lapa
ntal
la:
Det
erm
inar
else
ntid
ode
actu
ació
n
Con
trol
dela
carr
era
yaj
uste
delp
unto
cero
yde
ldes
plaz
amie
nto
(top
e-t
ope)
Det
erm
inac
ión
yin
dica
ción
delt
iem
pode
ajus
teab
ajo
(dxx
.x),
arrib
a(u
xx.x
)
Pas
oS
ign
ific
ado
Lain
icia
lizac
ión
term
inó
con
éxito
(car
rera
enm
mpa
raac
cion
amie
ntos
linea
les,
ángu
lode
giro
para
acci
onam
ient
osde
giro
)
Opt
imiz
ació
nde
lcom
port
amie
nto
osci
lato
rio
Det
erm
inac
ión
delo
sin
crem
ento
sde
desp
laza
mie
nto
mín
imos
Acc
iona
mie
nto
linea
l
Acc
iona
mie
nto
degi
ro
*)
*)pa
rapo
sibl
esaj
uste
sv.
reve
rso
dela
hoja
Opr
imir
>5
sLo
sde
más
paso
str
ansc
urre
nau
tom
átic
amen
te
(Los
valo
res
engr
isen
lalín
easu
perio
rde
lapa
ntal
laso
nej
empl
os.)
*)
Co
nfi
gu
rar
(sim
ulta
neam
ente
)
(sim
ulta
neam
ente
)
(sim
ulta
neam
.)
(sim
ulta
neam
.)
>5
s
hast
a
BE
1B
E1
Valo
rdel
pará
met
ro
Pos
ició
nde
lpo
tenc
ióm
etro
[%]
Núm
ero
yno
mbr
ede
lpar
ámet
ro
nore
aliz
arin
icia
lizac
ión
(se
obtie
nea
travé
sde
Pre
set)
1x >5
s
Pan
talla
Pos
ició
n[%
]
Valo
rde
cons
igna
[%]
Pos
ició
n[%
]
Valo
rde
cons
igna
[%]
Au
tom
átic
o
Mod
ode
op
erac
ión
Man
ual
Var
iarl
apo
sici
ón
Ser
vici
om
anua
l
Con
figur
ar
xx.x
xxx
>5
sco
n
1,5
kΩ
40Ω
40Ω
1,5
kΩ9,
2V
9,2
V1.
)
3.)
4.)
6.)
7.)
5.)
8.)
2.)
>5
s
Aju
star
enla
pala
nca
elnú
mer
ode
carr
eras
que
lesi
gue
enfo
rma
asce
nden
te.
Aju
star
enla
pala
nca
elnú
mer
ode
carr
eras
que
lesi
gue
enfo
rma
desc
ende
nte.
Alo
prim
irla
tecl
ase
real
iza
la .m
edic
ión
de
pér
did
apo
rfu
ga
66.
26.
110
3
78
9
1 2 3 4 5 6 7 8 9 10
42 1
5
90° 33
°
6
11
*)
Par
aac
cion
amie
nto
rápi
dos
cont
inua
rcon
:co
nt.c
on:
Ant
esde
cone
ctar
laen
ergí
aau
xilia
res
indi
spen
sabl
ere
tirar
elpu
ente
entr
ela
sbo
rnas
1y
2!
Ant
esde
cone
ctar
laen
ergí
aau
xilia
res
indi
spen
sabl
ere
tirar
elpu
ente
entr
ela
sbo
rnas
1y
2
!
Co
nex
ión
a3
ó4
hilo
s
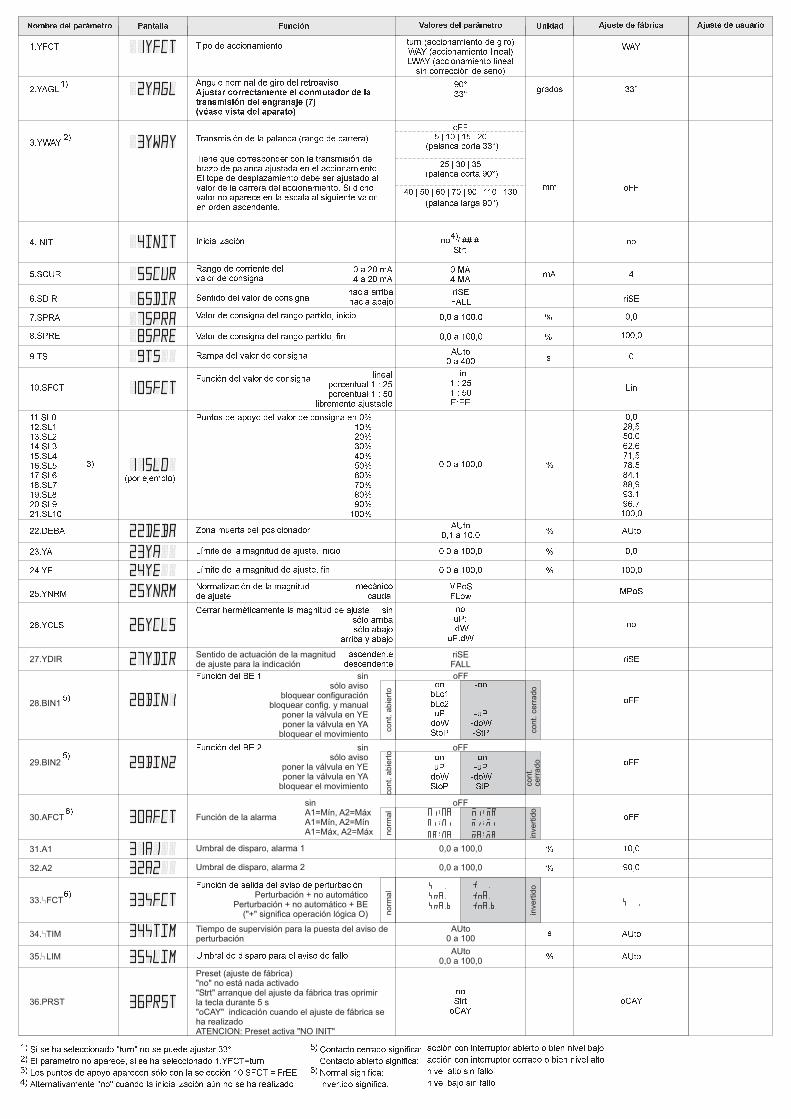
Si se ha seleccionado "turn" no se puede ajustar 33°
El parámetro no aparece, si se ha seleccionado 1.YFCT=turn
Los puntos de apoyo aparecen sólo con la selección 10.SFCT = FrEE
Alternativamente "no" cuando la inicialización aún no se ha realizado
Contacto cerrado significa:
Contacto abierto significa:
Normal significa:
Invertido significa:
1)
2)
3)
4)
5)
6)
Transmisión de la palanca (rango de carrera)
Inicialización
Rango de corriente delvalor de consigna
Valor de consigna del rango partido, inicio
Valor de consigna del rango partido, fin
Rampa del valor de consigna
Función del valor de consigna
Sentido del valor de consigna
Puntos de apoyo del valor de consigna en 0%10%20%30%40%50%60%70%80%90%
100%
Zona muerta del posicionador
Límite de la magnitud de ajuste, inicio
Límite de la magnitud de ajuste, fin
Normalización de la magnitudde ajuste
no / ##.#Strt
0 MA4 MA
riSEFALL
0,0 a 100,0
0,0 a 100,0
AUto0 a 400
AUto0,1 a 10,0
Lin1 : 251 : 50FrEE
0,0 a 100,0
0,0 a 100,0
0,0 a 100,0
MPoSFLow
nouP::dW
uP:dW
noStrtoCAY
Umbral de disparo para el aviso de fallo
oFF5 | 10 | 15 | 20
25 | 30 | 35
40 | 50 | 60 | 70 | 90 | 110 | 130
(palanca corta 33°)
(palanca corta 90°)
(palanca larga 90°)
90°33°
Angulo nominal de giro del retroavisoAjustar correctamente el conmutador de latransmisión del engranaje (7)(véase vista del aparato)
Tipo de accionamiento
3.YWAY2)
1)
4.INIT
6.SDIR
7.SPRA
8.SPRE
9.TS
10.SFCT
11.SL012.SL113.SL214.SL315.SL416.SL517.SL618.SL719.SL820.SL921.SL10
22.DEBA
23.YA
24.YE
26.YCLS
5.SCUR
3)
5)
5)
6)
6)
25.YNRM
2.YAGL
1.YFCTturn (accionamiento de giro)WAY (accionamiento lineal)LWAY (accionamiento linealsin corrección de seno)
(por ejemplo)
Tiene que corresponder con la transmisión delbrazo de palanca ajustada en el accionamiento.El tope de desplazamiento debe ser ajustado alvalor de la carrera del accionamiento. Si dichovalor no aparece en la escala al siguiente valoren orden ascendente.
0 a 20 mA4 a 20 mA
linealporcentual 1 : 25porcentual 1 : 50
libremente ajustable
mecánicocaudal
ascendentedescendente
4)
hacia arribahacia abajo
onuPdoWStoP
-on-uP-doW-StP
onbLc1bLc2uPdoWStoP
-on
-uP-doW-StP
norm
al
invert
iert
invert
iert
norm
al
mm
0,028,550,062,671,578,584,188,993,196,7100,0
oCAY
AUtos
%
% 10,0
90,0
oFF
oFF
oFF
riSE
no
MPoS
100,0
0,0
AUto
Lin
0
%
%
%
%
s
%
%
mA
100,0
0,0
riSE
4
% AUto
oFF
grados 33°
WAY
no
cont.
cerr
ado
cont.
cerr
ado
cont.
abie
rto
cont.
abie
rto
Función del BE 1
Función del BE 2
Función de salida del aviso de perturbación
acción con interruptor abierto o bien nivel bajo
acción con interruptor cerrado o bien nivel alto
nivel alto sin fallo
nivel bajo sin fallo
Nombre del parámetro Pantalla Función Valores del parámetro Unidad Ajuste de fábrica Ajuste de usuario
Cerrar herméticamente la magnitud de ajuste sinsólo arribasólo abajo
arriba y abajo
invert
ido
invert
ido

Vis
tade
lapa
rato
(con
lata
paab
iert
a)
Hoj
apl
egad
a"O
pera
ción
-in
stru
ccio
nes
brev
es"
(Nd
epe
dido
C79
000-
B74
78-C
160-
01)
o
SIP
AR
TP
S2
PA6
DR
410x
-xx
enac
cion
amie
ntos
dedo
ble
efec
to
Ent
rada
:aire
deal
imen
taci
ónP
ZS
alid
a:pr
esió
nde
ajus
teY
1P
anta
llaS
alid
a:pr
esió
nde
ajus
teY
2**
Tecl
asde
man
ejo
Obt
urad
orY
1O
btur
ador
Y1
**O
btur
ador
Y2
**C
onm
utad
orde
latr
ansm
isió
nde
len
gran
aje
Rue
dapa
rael
acop
lam
ient
oa
fric
ción
Bor
nas
deco
nexi
ónap
arat
obá
sico
Bor
nas
deco
nexi
ónm
ódul
osop
cion
ales
Con
mut
ador
del
aire
deba
rrid
o
)
) )
1 2 3 4 5 66.
16.
2 7 8 9 10 11
**)
Cam
bia
re
lniv
elde
op
erac
ión
Co
nex
ión
Pos
ible
sav
isos
Pri
mer
apu
esta
enm
arch
aau
tom
átic
a(p
artie
ndo
dela
just
ede
fábr
ica)
Se
sob
rep
asó
lab
and
ad
eto
lera
nci
ade
"Aba
jo"
Se
sobr
epas
óla
ban
da
de
tole
ran
cia
de"A
rrib
a"
Con
mut
arel
engr
anaj
e(7
)
cont
inua
rcon
:
Pon
erla
pala
nca
deco
nexi
ónen
posi
ción
horiz
onta
lut
iliza
ndo
Se
sobr
epas
óel
mar
gen
"arr
iba
-ab
ajo
"
En
acci
onam
ient
osde
giro
tam
bién
sepu
ede:
Tie
mp
od
eaj
ust
em
uy
cort
oA
umen
tare
ltie
mpo
deaj
uste
porm
edio
delo
btur
ador
cont
inua
rco
n:
ode
spla
zar
elac
opla
mie
nto
afr
icci
ónha
sta
lapa
ntal
la:
des
pu
éssó
loco
ntin
uarc
on:
Ela
ccio
nam
ien
tono
sem
uev
eV
erifi
caro
btur
ador
(6)y
dado
elca
soab
rirlo
Sig
nifi
cad
oP
anta
llaM
edid
asa
seg
uir
Mov
erel
acci
onam
ient
oen
elm
arge
nde
trab
ajo
con
Acu
sar
con:
Acu
sarc
on:
Acu
sarc
on:
Otr
osav
iso
sv.
man
ual
del
apar
ato
cont
inua
rcon
:
cont
inua
rcon
:
Arr
anca
rde
nuev
ola
inic
iali-
zaci
ón
Arr
anca
rde
nuev
ola
inic
iali-
zaci
ón
Arr
anca
rde
nuev
ola
inic
iali-
zaci
ón
Sis
ed
esp
lazó
elac
op
lam
ien
toa
fric
ció
n
desp
laza
rco
nha
sta
lapa
ntal
la:
Det
erm
inar
else
ntid
ode
actu
ació
n
Con
trol
dela
carr
era
yaj
uste
delp
unto
cero
yde
ldes
plaz
amie
nto
(top
e-t
ope)
Det
erm
inac
ión
yin
dica
ción
delt
iem
pode
ajus
teab
ajo
(dxx
.x),
arrib
a(u
xx.x
)
Pas
oS
ign
ific
ado
Lain
icia
lizac
ión
term
inó
con
éxito
(car
rera
enm
mpa
raac
cion
amie
ntos
linea
les,
ángu
lode
giro
para
acci
onam
ient
osde
giro
)
Opt
imiz
ació
nde
lcom
port
amie
nto
osci
lato
rio
Det
erm
inac
ión
delo
sin
crem
ento
sde
desp
laza
mie
nto
mín
imos
Acc
iona
mie
nto
linea
l
Acc
iona
mie
nto
degi
ro
*)
*)pa
rapo
sibl
esaj
uste
sv.
reve
rso
dela
hoja
Opr
imir
>5
sLo
sde
más
paso
str
ansc
urre
nau
tom
átic
amen
te
(Los
valo
res
engr
isen
lalín
easu
perio
rde
lapa
ntal
laso
nej
empl
os.)
*)
Co
nfi
gu
rar
(sim
ulta
neam
ente
)
(sim
ulta
neam
ente
)
(sim
ulta
neam
.)
(sim
ulta
neam
.)
>5
s
hast
a
Valo
rdel
pará
met
ro
Pos
ició
nde
lpo
tenc
ióm
etro
[%]
Núm
ero
yno
mbr
ede
lpar
ámet
ro
nore
aliz
arin
icia
lizac
ión
(se
obtie
nea
travé
sde
Pre
set)
1x >5
s
Pan
talla
Pos
ició
n[%
]
Valo
rde
cons
igna
[%]
Pos
ició
n[%
]
Valo
rde
cons
igna
[%]
Au
tom
átic
o
Mod
ode
op
erac
ión
Man
ual
Var
iarl
apo
sici
ón
Ser
vici
om
anua
l
Con
figur
ar
xx.x
xxx
>5
sco
n
Var
iarl
apo
sici
ónco
n
1.)
3.)
4.)
6.)
7.)
5.)
8.)
2.)
>5
s
Aju
star
enla
pala
nca
elnú
mer
ode
carr
eras
que
lesi
gue
enfo
rma
asce
nden
te.
Aju
star
enla
pala
nca
elnú
mer
ode
carr
eras
que
lesi
gue
enfo
rma
desc
ende
nte.
Alo
prim
irla
tecl
ase
real
iza
la .m
edic
ión
de
pér
did
apo
rfu
ga
*)
Par
aac
cion
amie
nto
rápi
dos
cont
inua
rcon
:co
nt.c
on:
89
3 7 9 10
42 1
56
6.2
6.1
10
3
7
90° 33
°
6
11
Aco
plad
orD
P/P
A
9...
24V
10973
Ent
rada
bina
ria1
Pos
icio
nado
r
+3V
-+P
RO
FIB
US
PAIE
C11
58-2
#
#A
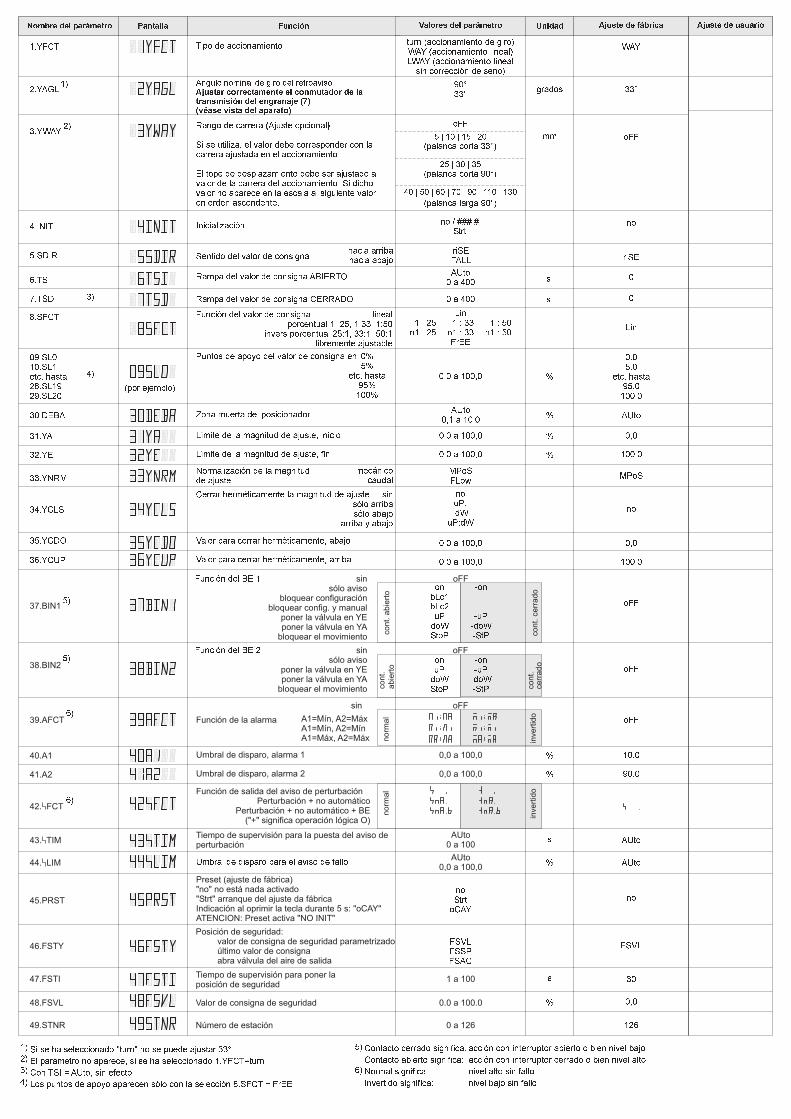
invert
ido
invert
ido
norm
al
norm
al
Si se ha seleccionado "turn" no se puede ajustar 33°
El parámetro no aparece, si se ha seleccionado 1.YFCT=turn
Con TSI = AUto, sin efecto
Los puntos de apoyo aparecen sólo con la selección 8.SFCT = FrEE
1)
2)
3)
4)
5)
6)
3.YWAYRango de carrera Ajuste opcional
Si se utiliza, el valor debe corresponder con lacarrera ajustada en el accionamiento
El tope de desplazamiento debe ser ajustado alvalor de la carrera del accionamiento. Si dichovalor no aparece en la escala al siguiente valoren orden ascendente.
( )
mm
2)
1)
4.INIT
6.TSI
7.TSD
8.SFCT
09.SL010.SL1etc. hasta28.SL1929.SL20
Inicialización
Rampa del valor de consigna ABIERTO
Rampa del valor de consigna CERRADO
Función del valor de consigna
Sentido del valor de consigna
0%5%
etc. hasta95%100%
0.05.0
etc. hasta95.0100.0
5.SDIR
no / ###.#Strt
riSEFALL
AUto0 a 400
0 a 400
Lin1 : 33
FrEEn1 : 33
1 : 50n1 : 50
1 : 25n1 : 25
0,0 a 100,0
Lin
0
0
%
s
s
riSE
4)
3)
oFF
40 | 50 | 60 | 70 | 90 | 110 | 130
25 | 30 | 35
5 | 10 | 15 | 20
oFF
(palanca corta 33°)
(palanca corta 90°)
(palanca larga 90°)
2.YAGL90°33°
grados 33°Angulo nominal de giro del retroavisoAjustar correctamente el conmutador de latransmisión del engranaje (7)(véase vista del aparato)
Tipo de accionamiento1.YFCT WAYturn (accionamiento de giro)WAY (accionamiento lineal)LWAY (accionamiento linealsin corrección de seno)
(por ejemplo)
no
linealporcentual 1: 25, 1:33, 1:50
invers porcentual 25:1, 33:1, 50:1libremente ajustable
30.DEBA
31.YA
32.YE
34.YCLS
35.YCDO
36.YCUP
Zona muerta del posicionador
Límite de la magnitud de ajuste, inicio
Límite de la magnitud de ajuste, fin
Normalización de la magnitudde ajuste
Valor para cerrar herméticamente, abajo
Valor para cerrar herméticamente, arriba
AUto0,1 a 10,0
0,0 a 100,0
0,0 a 100,0
0,0 a 100,0
0,0 a 100,0
MPoSFLow
nouP::dW
uP:dW
no
MPoS
100,0
100,0
0,0
0,0
AUto
%
%
%
33.YNRMmecánico
caudal
6)
6)
hacia arribahacia abajo
%
%
30
126
0,0
90,0
10,0
oFF
oFF
oFF5)
5)
cont.
abie
rto
cont.
abie
rto
cont.
cerr
ado
onuPdoWStoP
-on-uP-doW-StP
onbLc1bLc2uPdoWStoP
-on
-uP-doW-StP
noStrtoCAY
FSVLFSSPFSAC
FSVL
no
AUtos
s
%
%
AUtoUmbral de disparo para el aviso de fallo
Función del BE 2
Nombre del parámetro Pantalla Función Valores del parámetro Unidad Ajuste de fábrica Ajuste de usuario
cont.
cerr
ado
Función del BE 1
Cerrar herméticamente la magnitud de ajuste sinsólo arribasólo abajo
arriba y abajo
Puntos de apoyo del valor de consigna en
Contacto cerrado significa:
Contacto abierto significa:
Normal significa:
Invertido significa:
acción con interruptor abierto o bien nivel bajo
acción con interruptor cerrado o bien nivel alto
nivel alto sin fallo
nivel bajo sin fallo

AnnexeAppendiceAnexo
Installation des optionsC79000-M7450-C156-01
Installazione dei moduli opzionaliMontaje de las opciones
1 Couvercle de la carte 1 Coperchio dei moduli 1 Cubierta de la tarjeta1.1 Vis de fixation 1.1 Viti di fissaggio 1.1 Tornillos de sujeción2 Module HART 2 Modulo HART 2 Módulo HART3 Module Jy avec câble plat (6) 3 Modulo Jy con cavo piatto (6) 3 Módulo Jy con cable plano (6)4 Module d’alarme 4 Modulo di allarme 4 Módulo de alarma
avec câble plat (5) con cavo piatto (5) con cable plano (5)7 Cavalier 7 Ponticello 7 Puente enchufable8 Réglage de l’accouplement 8 Manopola regolazione guinto 8 Rueda para el desplazamiento
à friction a frizione del acoplamiento del embrague9 Commutateur de transmission 9 Commutatore rapporto di 9 Commutador de la transmisión
par engrenages trasmissione del engranaje
1
2
3
4
5
6
7
8 9
1.1
1.1
Fig. 3 Installation des modules optionnels
Figura 3 Installazione dei moduli opzionali
Figura 3 Montaje de las opciones
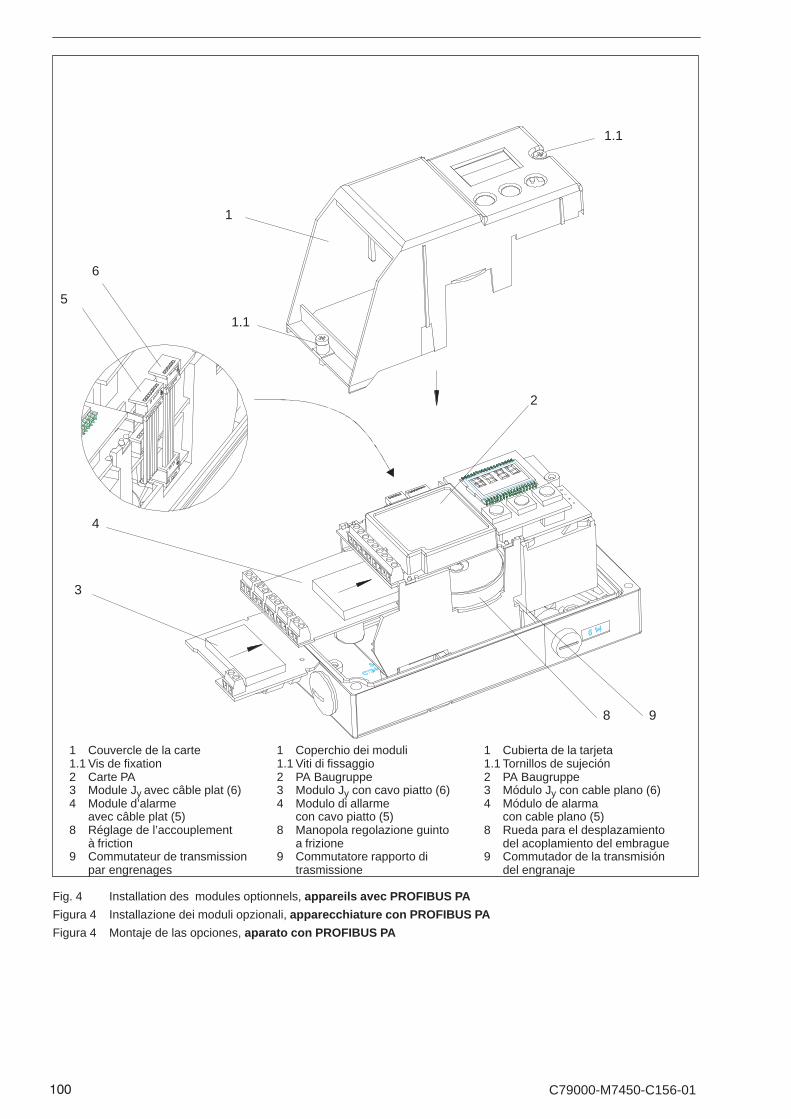
C79000-M7450-C156-01
1
2
3
4
5
6
8 9
1 Couvercle de la carte 1 Coperchio dei moduli 1 Cubierta de la tarjeta1.1 Vis de fixation 1.1 Viti di fissaggio 1.1 Tornillos de sujeción2 Carte PA 2 PA Baugruppe 2 PA Baugruppe3 Module Jy avec câble plat (6) 3 Modulo Jy con cavo piatto (6) 3 Módulo Jy con cable plano (6)4 Module d’alarme 4 Modulo di allarme 4 Módulo de alarma
avec câble plat (5) con cavo piatto (5) con cable plano (5)8 Réglage de l’accouplement 8 Manopola regolazione guinto 8 Rueda para el desplazamiento
à friction a frizione del acoplamiento del embrague9 Commutateur de transmission 9 Commutatore rapporto di 9 Commutador de la transmisión
par engrenages trasmissione del engranaje
1.1
1.1
Fig. 4 Installation des modules optionnels, appareils avec PROFIBUS PA
Figura 4 Installazione dei moduli opzionali, apparecchiature con PROFIBUS PA
Figura 4 Montaje de las opciones, aparato con PROFIBUS PA
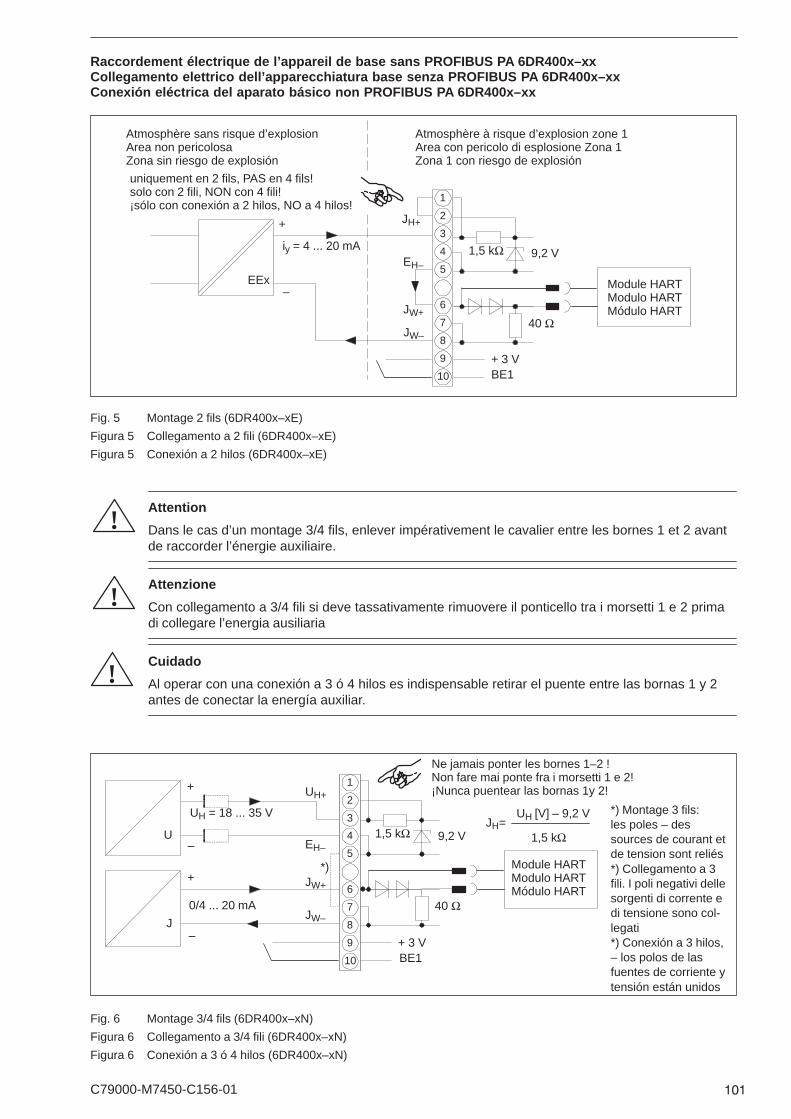
Raccordement électrique de l’appareil de base sans PROFIBUS PA 6DR400x–xx
C79000-M7450-C156-01
Collegamento elettrico dell’apparecchiatura base senza PROFIBUS PA 6DR400x–xxConexión eléctrica del aparato básico non PROFIBUS PA 6DR400x–xx
iy = 4 ... 20 mA
JH+
EH–
JW+
JW–
1
2
3
4
5
6
7
8
9
10
EEx
+
–
BE1
40 Ω
1,5 kΩ 9,2 V
Atmosphère sans risque d’explosionArea non pericolosaZona sin riesgo de explosión
Atmosphère à risque d’explosion zone 1Area con pericolo di esplosione Zona 1Zona 1 con riesgo de explosión
Module HARTModulo HARTMódulo HART
+ 3 V
uniquement en 2 fils, PAS en 4 fils! solo con 2 fili, NON con 4 fili!¡sólo con conexión a 2 hilos, NO a 4 hilos!
Fig. 5 Montage 2 fils (6DR400x–xE)
Figura 5 Collegamento a 2 fili (6DR400x–xE)
Figura 5 Conexión a 2 hilos (6DR400x–xE)
!Attention
Dans le cas d’un montage 3/4 fils, enlever impérativement le cavalier entre les bornes 1 et 2 avantde raccorder l’énergie auxiliaire.
!Attenzione
Con collegamento a 3/4 fili si deve tassativamente rimuovere il ponticello tra i morsetti 1 e 2 primadi collegare l’energia ausiliaria
!Cuidado
Al operar con una conexión a 3 ó 4 hilos es indispensable retirar el puente entre las bornas 1 y 2antes de conectar la energía auxiliar.
0/4 ... 20 mA
+
–
+
– EH–
JW+
UH+
JW–
UH = 18 ... 35 V
U
J
1
2
3
4
5
6
7
8
9
10
JH=UH [V] – 9,2 V
1,5 kΩ
*)
BE1
40 Ω
1,5 kΩ 9,2 V
*) Montage 3 fils:les poles – dessources de courant etde tension sont reliés*) Collegamento a 3fili. I poli negativi dellesorgenti di corrente edi tensione sono col-legati*) Conexión a 3 hilos,– los polos de lasfuentes de corriente ytensión están unidos
Module HARTModulo HARTMódulo HART
+ 3 V
Ne jamais ponter les bornes 1–2 ! Non fare mai ponte fra i morsetti 1 e 2!¡Nunca puentear las bornas 1y 2!
Fig. 6 Montage 3/4 fils (6DR400x–xN)
Figura 6 Collegamento a 3/4 fili (6DR400x–xN)
Figura 6 Conexión a 3 ó 4 hilos (6DR400x–xN)

C79000-M7450-C156-01
Raccordement électrique de l’appareil de base avec PROFIBUS PA 6DR410x–xxCollegamento elettrico dell’apparecchiatura base con PROFIBUS PA 6DR400x–xxConexión eléctrica del aparato básico con PROFIBUS PA 6DR410x–xx
580
10
Câble–bus / 6XV1 830–5AH10ou/ 6XV1 830–5BH10
Blindage du câbleSchermatura cavoBlindaje del cable
Cable de bus / 6XV1 830–5AH10o / 6XV1 830–5BH10
Cavo bus / 6XV1 830–5AH10oppure/ 6XV1 830–5BH10
Fig. 7 Equipement du câble–bus (6DR410x–xx), appareils avec PROFIBUS PA
Figura 7 Preparazione del cavo bus (6DR410–xx), apparecchiature con PROFIBUS PA
Figura 7 Preparación del cable de bus (6DR410x–xx), aparatos con PROFIBUS PA
9
37
10
Câble–busCavo busCable de bus
Raccord PGConnessione a vite PGRacor de PG
Platine de baseCircuito stampatoTarjeta básica
Collier de câbleFascetta stringicavoGrapa de cable
BoîtierScatolaCarcasa
Plaque d’obturationCoperchio ciecoTapa ciega
Couvercle de la carteCopertura gruppo costruttivoCubierta del módulo
Blindage du câbleSchermatura cavoBlindaje del cable
Fig. 8 Raccordement du câble–bus, appareils avec PROFIBUS PA
Figura 8 Collegamento del cavo bus, apparecchiature con PROFIBUS PA
Figura 8 Conexión del cable de bus, aparatos con PROFIBUS PA
Coupleur DP/PAAccoppiatore DP/PAAcoplador DP/PA
Zone sans risque d’explosionArea non pericolosaZona sin riesgo de explosión
9 ... 24 V
10
9
7
3
Entrée binaire 1Entrata binaria 1Entrada binaria 1
Zone à risque d’explosion zone 1Area con pericolo di esplosione Zona 1Zona 1 con riesgo de explosión
PositionneurPosizionatorePosicionador
+3V
–
+
PROFIBUS PA
EEx
A
#
#
Fig. 9 Raccordement électrique, appareil de base avec PROFIBUS PA (6DR410x-xE)
Figura 9 Collegamento elettrico apparecchiatura di base con PROFIBUS PA (6DR410x–xE)
Figura 9 Conexión eléctrica, aparato básico con PROFIBUS PA (6DR410x-xE)
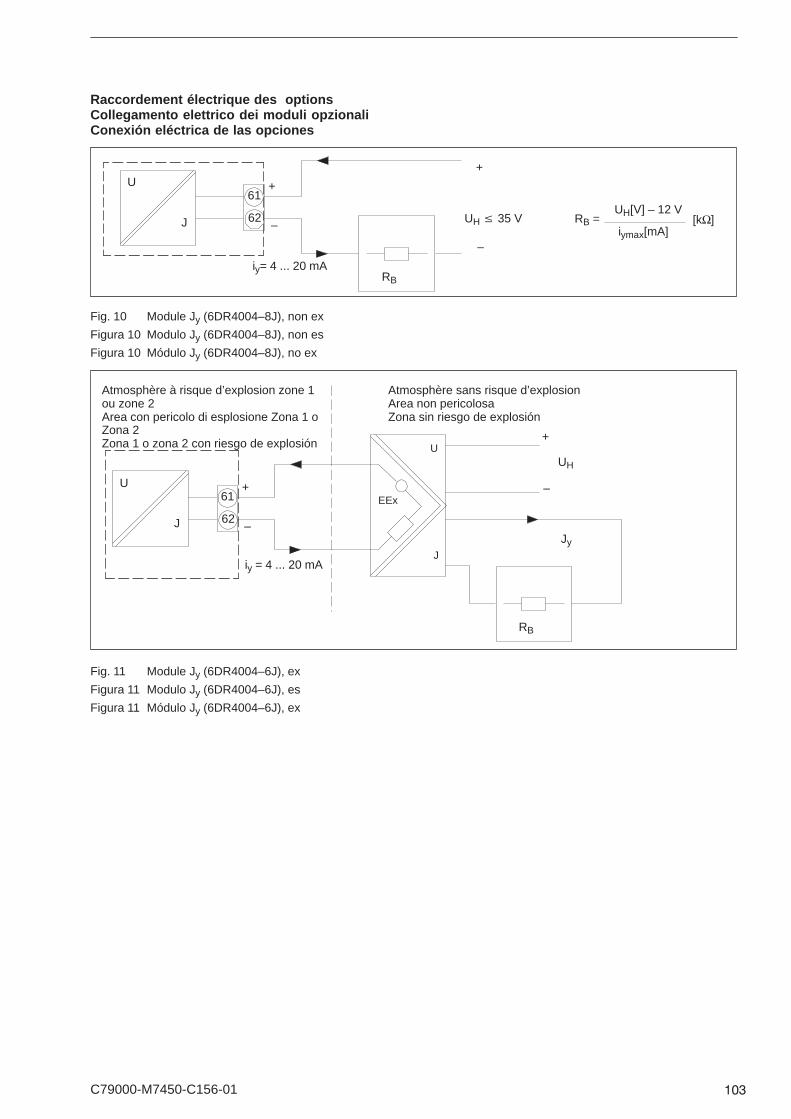
C79000-M7450-C156-01
Raccordement électrique des optionsCollegamento elettrico dei moduli opzionaliConexión eléctrica de las opciones
J
U61
62
RB
+
–
iy= 4 ... 20 mA
UH 35 V
+
–
RB =UH[V] – 12 V
iymax[mA][kΩ]
Fig. 10 Module Jy (6DR4004–8J), non ex
Figura 10 Modulo Jy (6DR4004–8J), non es
Figura 10 Módulo Jy (6DR4004–8J), no ex
J
U61
62
RB
+
–
iy = 4 ... 20 mA
U
J
EEx
Jy
UH
+
–
Atmosphère à risque d’explosion zone 1ou zone 2Area con pericolo di esplosione Zona 1 oZona 2Zona 1 o zona 2 con riesgo de explosión
Atmosphère sans risque d’explosionArea non pericolosaZona sin riesgo de explosión
Fig. 11 Module Jy (6DR4004–6J), ex
Figura 11 Modulo Jy (6DR4004–6J), es
Figura 11 Módulo Jy (6DR4004–6J), ex

C79000-M7450-C156-01
5 V
24 V51
52
41
42
31
32
+ 18 V ... + 35 V
–
L+
BE
par ex./p. es./p.ej.SIPARTDR21
1kΩ A2 A1
Fig. 12 Module d’alarme: sorties binaires (6DR4004–8A), non ex
Figura 12 Modulo di allarme: uscite digitali (6DR4004–8A), non es
Figura 12 Módulo de alarma: salidas binarias (6DR4004–8A), no ex
Ampli–séparateur DIN 19234Amplificatore DIN 19234DIN 19234–Amplificador de conexión
Atmosphère à risque d’explosion zone 1 ou zone 2Area con pericolo di esplosione Zona 1 o Zona 2Zona 1 o zona 2 con riesgo de explosión
Atmosphère sans risque d’explosionArea non pericolosaZona sin riesgo de explosión
51
52
41
42
31
32
+ DIN
–
2,1kΩ A2 A110kΩ
EEx
Fig. 13 Module d’alarme: sorties binaires (6DR4004–6A), ex
Figura 13 Modulo di allarme: uscite digitali (6DR4004–6A), es
Figura 13 Módulo de alarma: salidas binarias (6DR4004–6A), ex
21
22
11
12
#
1
+ 3 V
BE2+13 V
+4,5 V
Fig. 14 Module d’alarme: entrée binaire BE2 (6DR4004–8A), non ex
Figura 14 Modulo di allarme: ingresso digitale BE2 (6DR4004–8A), non es
Figura 14 Módulo de alarma: entrada binaria BE2 (6DR4004–8A), no ex
21
22
11
12
#
1
3 V
BE2
=
Atmosphère sans risqued’explosionArea non pericolosaZona sin riesgo de explosión
Atmosphère à risque d’explosion zone 1 ou zone 2Area con pericolo di esplosione Zona 1 o Zona 2Zona 1 o zona 2 con riesgo de explosión
Fig. 15 Module d’alarme: entrée binaire BE2 (6DR4004–8A), ex
Figura 15 Modulo di allarme: ingresso digitale BE2 (6DR4004–8A), es
Figura 15 Módulo de alarma: entrada binaria BE2 (6DR4004–8A), ex
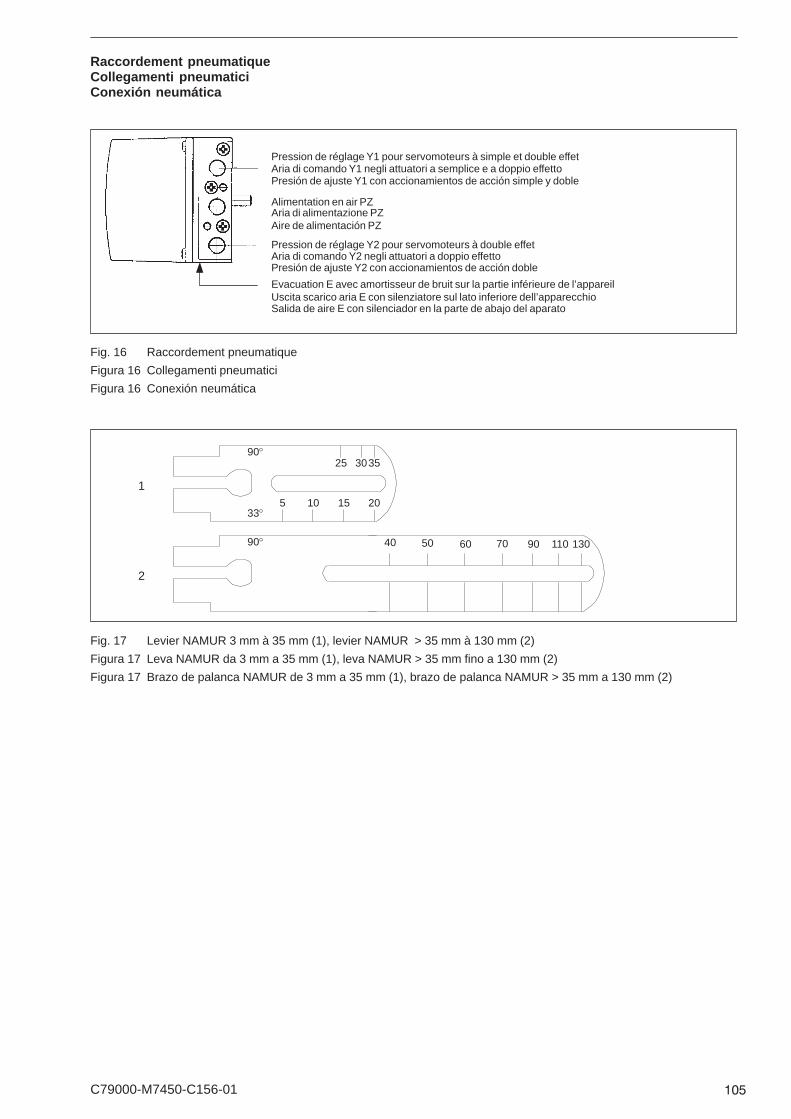
C79000-M7450-C156-01
Raccordement pneumatiqueCollegamenti pneumaticiConexión neumática
Pression de réglage Y1 pour servomoteurs à simple et double effet
Alimentation en air PZ
Pression de réglage Y2 pour servomoteurs à double effet
Evacuation E avec amortisseur de bruit sur la partie inférieure de l’appareil
Aria di comando Y1 negli attuatori a semplice e a doppio effetto
Aria di alimentazione PZ
Aria di comando Y2 negli attuatori a doppio effetto
Uscita scarico aria E con silenziatore sul lato inferiore dell’apparecchio
Presión de ajuste Y1 con accionamientos de acción simple y doble
Aire de alimentación PZ
Presión de ajuste Y2 con accionamientos de acción doble
Salida de aire E con silenciador en la parte de abajo del aparato
Fig. 16 Raccordement pneumatique
Figura 16 Collegamenti pneumatici
Figura 16 Conexión neumática
33°5 10 15 20
25 303590°
90° 110 1309070605040
1
2
Fig. 17 Levier NAMUR 3 mm à 35 mm (1), levier NAMUR > 35 mm à 130 mm (2)
Figura 17 Leva NAMUR da 3 mm a 35 mm (1), leva NAMUR > 35 mm fino a 130 mm (2)
Figura 17 Brazo de palanca NAMUR de 3 mm a 35 mm (1), brazo de palanca NAMUR > 35 mm a 130 mm (2)

C79000-M7450-C156-01


Siemens AG 1999 All rights reserved
Siemens AGBereich Automatisierungs- und AntriebstechnikGeschäftsgebiet A&D PAD-76181 Karlsruhe
Siemens AktiengesellschaftC79000-M7450-C156Printed in FranceAG 0799 MG 108 Fr/It/Sp


















