
Simulation mécanique et réalité virtuelle : outils d’aide...
72
1 Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes Soutenance d’Habilitation à Diriger des Recherches Présentée à l’Université de Rennes 1 section mécanique (n° 60) Le 23 novembre 2005 par Georges Dumont
Transcript of Simulation mécanique et réalité virtuelle : outils d’aide...
1Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Simulation mécanique et réalité virtuelle :outils d’aide à la compréhension et à la conception
de systèmes
Soutenance d’Habilitation à Diriger des RecherchesPrésentée à l’Université de Rennes 1
section mécanique (n° 60)Le 23 novembre 2005 par Georges Dumont
2Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Membres du jury
Daniel Coutellier Professeur, Université de Valenciennes, Rapporteur
Bernard Espiau Directeur de Recherches, INRIA Rhône-Alpes, Rapporteur
Jean-Claude Léon Professeur, Université de Grenoble, Rapporteur
Pierre Beckers Professeur, Université de Liège
Patrick Chedmail Professeur, École Centrale de Nantes
Paul Delamarche Professeur, Université de Rennes 2
Lalaonirina Rakotomanana Professeur, Université de Rennes 1
3Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Un rapide Curriculum vitæ
4Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Titres
IngénieurÉcole Nationale des Ponts et Chaussées (1987)
Diplôme d’Études ApprofondiesParis VI, mécanique (1987)
DocteurUniversité de Rennes 1, informatique (1990)
5Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Parcours
Ingénieur Stagiaire Michelin (1 an) : éléments finis incompressibles pour le caoutchouc
Thèse (3 ans) : la mécanique comme modèle de mouvement
Ingénieur Expert INRIA (1 an) : projet de simulateur de conduite automobile SARA
Ingénieur Chercheur EDF (30 mois) : contact et éléments finis dans le code ASTER
Maître de Conférences : École Normale Supérieure de Cachan, mécanique (1994)
Chargé de Recherches INRIA (2 ans) 2002-2004
6Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Points clés : enseignement
Préparation à l’agrégation de mécaniqueCours et TD : 1/3 des épreuvesMécanique générale : solides rigidesMécanique des solides déformables
Troisième cyclePrototypage virtuel au M2R RESIN (ENS/PARIS VI)Mécanique et réalité virtuelle dans le M2P MNRV (Laval)Conception multimétiers en École doctorale de l’ENS-Cachan
Second cycleÉchange de services avec Rennes 1Licence et maîtrise (L3, M1) : RDM
7Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Points clés : responsabilités
Naissance d’un département de Génie MécaniqueOuverture de l’Antenne de l’ENSAvec Pascal Mognol
Direction d’études700 heures élève20 intervenants extérieursRésultats comparables à ceux de la maison mère (ENS Cachan)
Fonctions collectivesCommissions de spécialistes (Rennes 1, ECN)Jury de concours PSI (ENS/Polytechnique)Conseil scientifique de l’ENS (8 ans)Conseil de laboratoire de l’IRISA (depuis 2004)
8Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Points clés : recherche
Thème : Réalité virtuelle et mécaniqueProjet SIAMES de l’IRISADétachement de 2 ansBilan succinct (depuis 1998):
2 thèses soutenues, 2 thèses en cours4 stages de DEA (M2R)2 études post doctorales6 participations à des jurys de thèse7 revues internationales, 1 chapitre d’ouvrage 11 conférences internationales3 collaborations avec publications communes1 projet RNTL Salomé22 actions spécifiques CNRS : contact et humain1 ATIP CNRS : paléoanthropologie
Titulaire de la PEDR (octobre 2005)
9Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Définitions des termes « outils »
L’homme en interaction avec un monde virtuel modélisé ?
Simulation mécanique et réalité virtuelleMécanique : modèle de la réalité
Science du mouvementEfforts, déplacements, énergieObjet au cœur des préoccupations
Réalité virtuelle : interaction avec les modèlesImmersion/interactionHumain au cœur des préoccupations
10Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Plan
CredoPrototypage virtuelInteractions entre objetsCouplage simulation/RVHumain virtuelPistes et conclusion
11Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Credo
Credo
Prototypage virtuelInteractions entre objetsCouplage simulation/RVHumain virtuelPistes et conclusion
ContexteMonde virtuel et monde réelDu virtuel vers le réelDu réel vers le virtuel
12Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Contexte
Bureau d’étude du futurRéduire la durée de conceptionEt les coûts
Modèles de simulationCompréhension du fonctionnementMaîtrise du temps de simulation : pertinence du modèle
Session de Réalité virtuelleManipulationProblématique du temps de calcul : temps réel
13Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
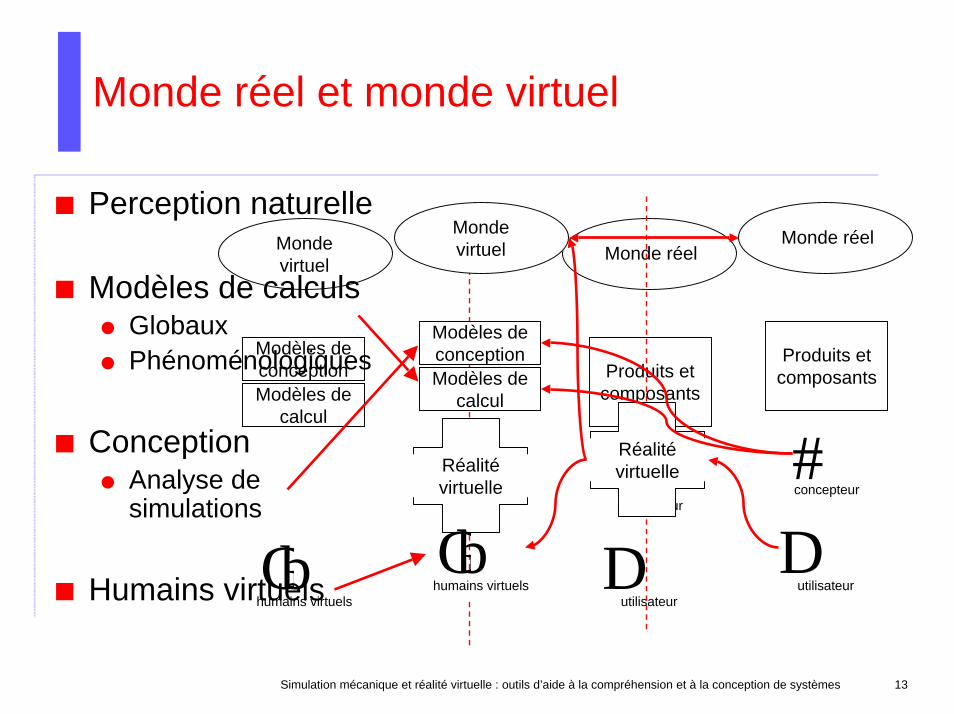
Monde réel et monde virtuel
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
Perception naturelle
Modèles de calculsGlobauxPhénoménologiques
ConceptionAnalyse de simulations
Humains virtuels
14Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Les relations entre le réel et le virtuel
Du réel vers le virtuel : compréhensionComprendre les phénomènesProposer des modèles
Mécanique
Du virtuel vers le réel : conceptionCapacités d’interactionAnalyseRetour sur les modèles
Réalité virtuelle
15Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Prototypage virtuel
CredoPrototypage virtuel
Interactions entre objetsCouplage simulation/RVHumain virtuelPistes et conclusion
ProblématiqueContributionsConclusion partielle
16Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
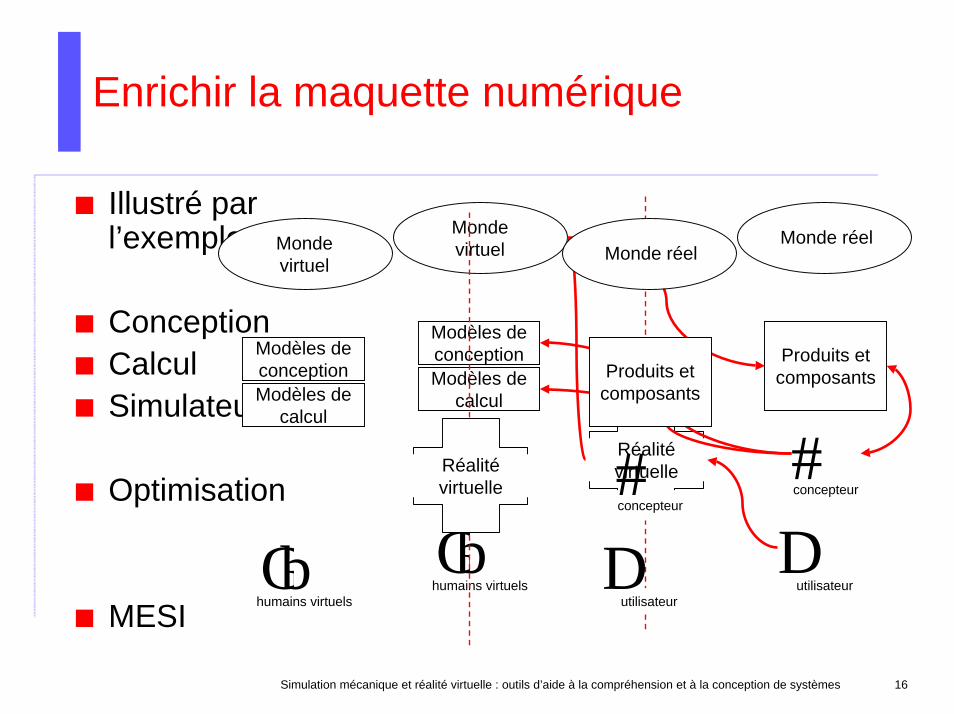
Enrichir la maquette numérique
Illustré par l’exemple
ConceptionCalculSimulateur
Optimisation
MESI
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
17Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
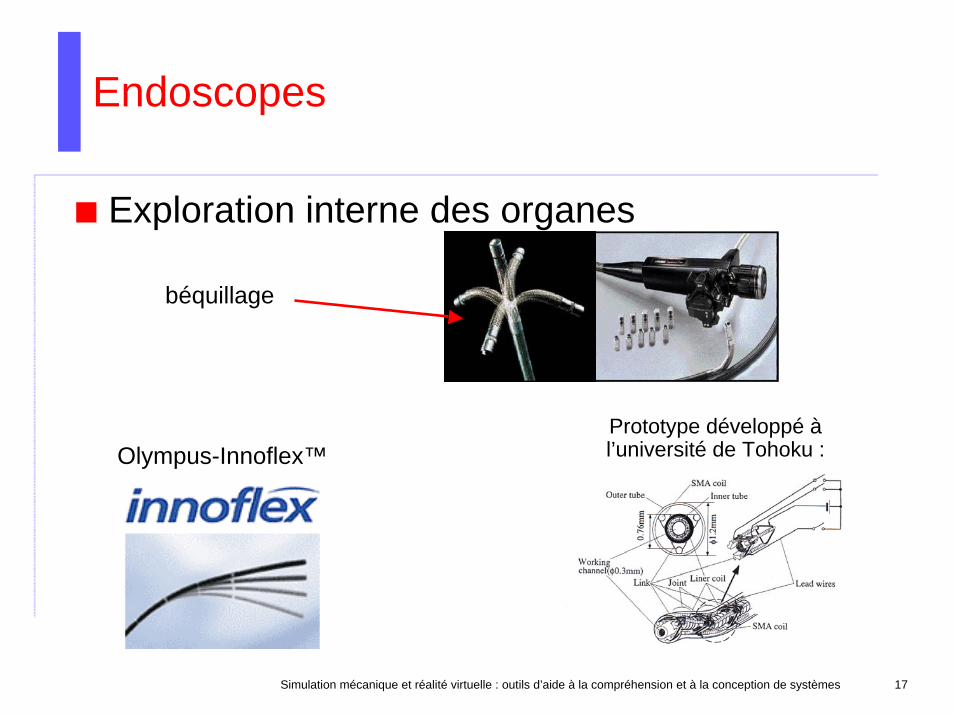
Endoscopes
Exploration interne des organes
béquillage
Prototype développé àl’université de Tohoku :Olympus-Innoflex™
18Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
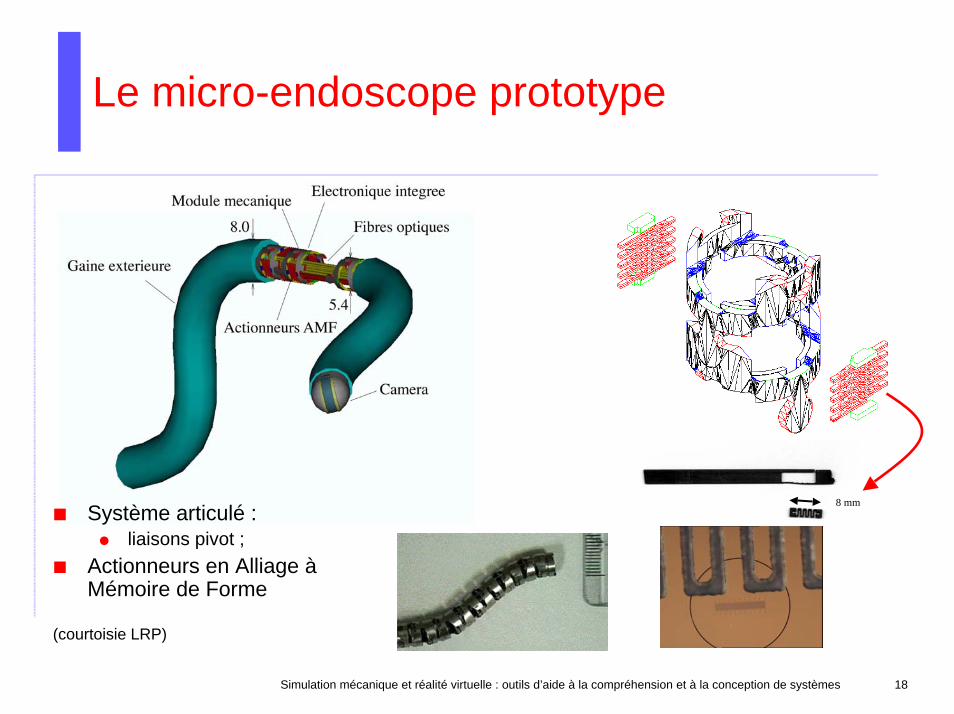
Le micro-endoscope prototype
8 mmSystème articulé :
liaisons pivot ;Actionneurs en Alliage à Mémoire de Forme
(courtoisie LRP)
19Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
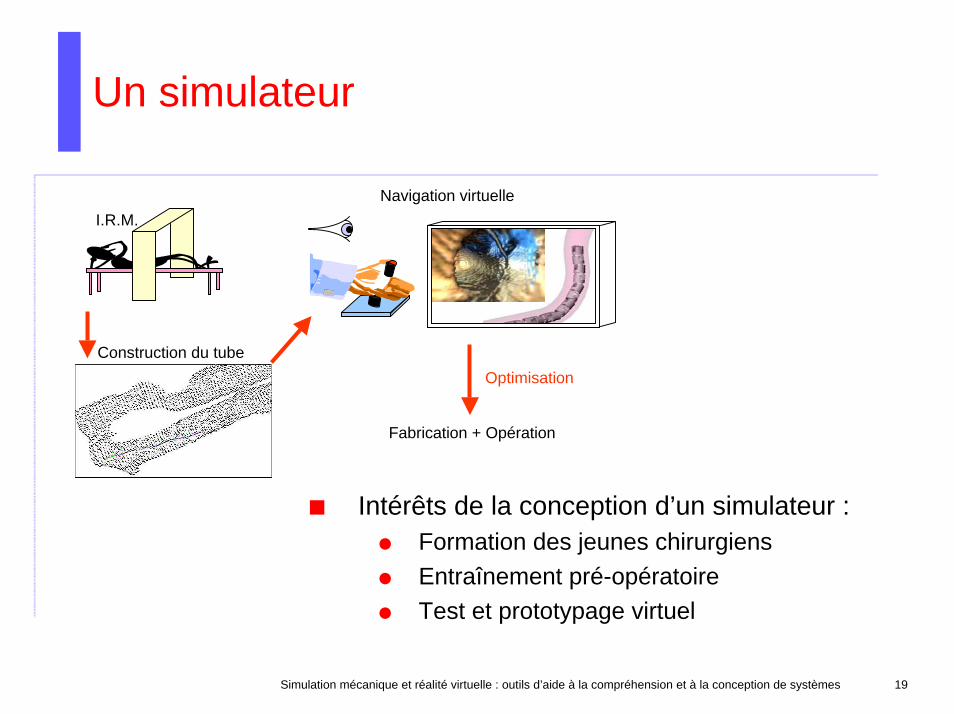
Un simulateur
I.R.M.
Construction du tube
Fabrication + Opération
Optimisation
Navigation virtuelle
Intérêts de la conception d’un simulateur : Formation des jeunes chirurgiensEntraînement pré-opératoireTest et prototypage virtuel
20Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
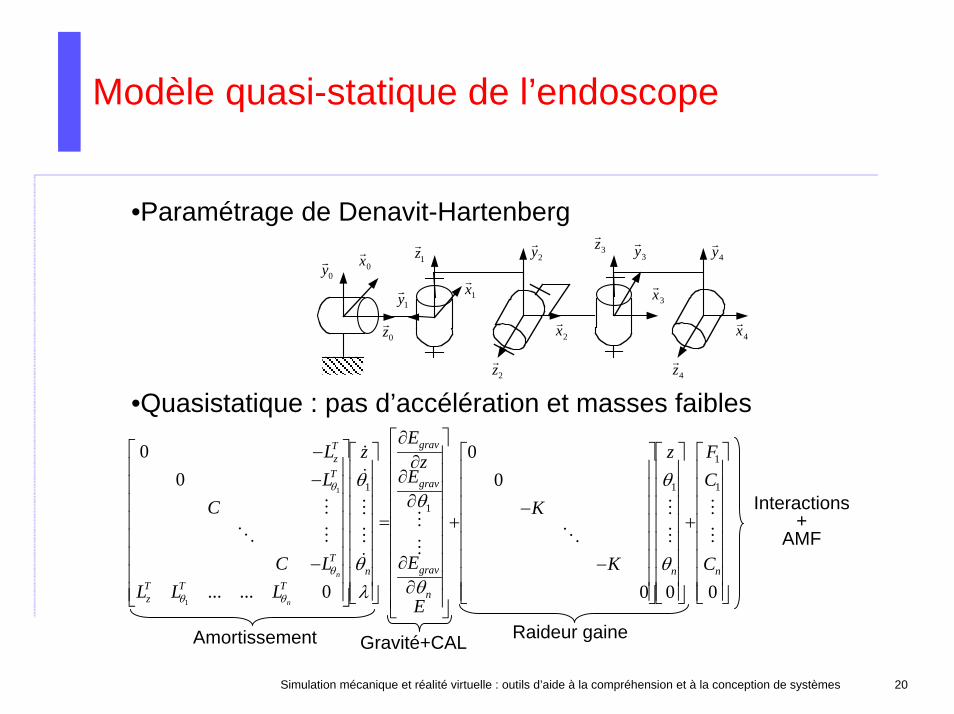
Modèle quasi-statique de l’endoscope
•Paramétrage de Denavit-Hartenberg
•Quasistatique : pas d’accélération et masses faibles
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−+
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
000
00
0
00
1
1
1
1
1
1
1
nn
n
grav
grav
grav
nTTT
z
T
T
Tz
C
CFz
K
K
E
E
Ez
Ez
L......LLLC
CLL
n
n
M
M
M
M
OM
M
&M
M
&&
MO
M
θ
θ
θ
θ
λθ
θ
θθ
θ
θ
Amortissement Gravité+CAL Raideur gaine
Interactions+
AMF
r x 0r
y 0
r z 0
r y 1
r x 1
r z 1
r z 2
r x 2
r y 2
r x 3
r y 3
r z 3
r z 4
r x 4
r y 4
21Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
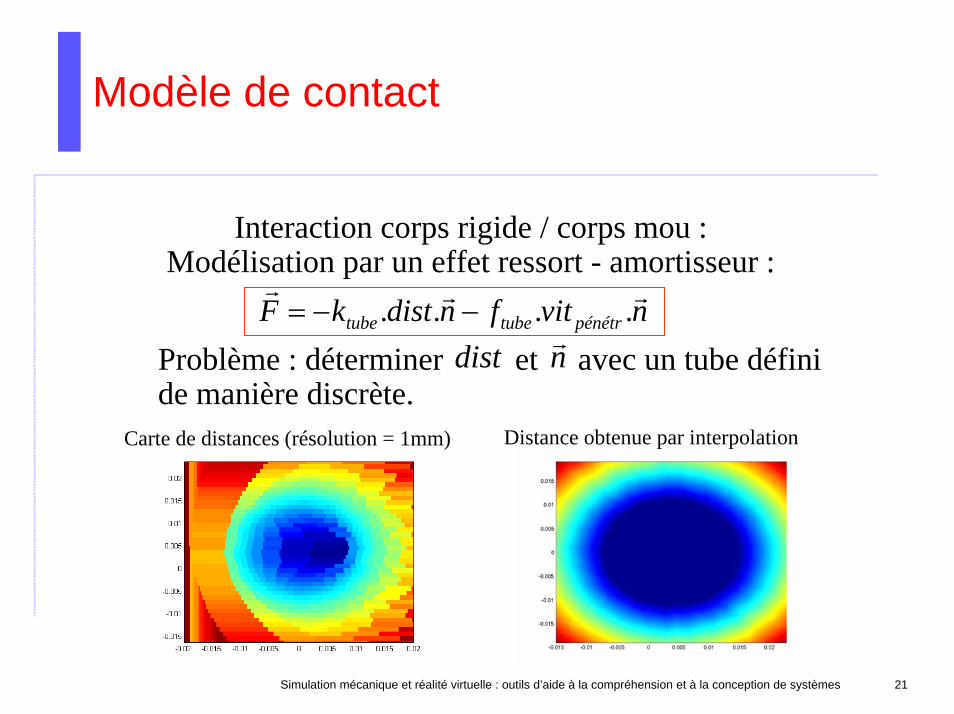
Modèle de contact
Interaction corps rigide / corps mou : Modélisation par un effet ressort - amortisseur :
nvitfndistkF pénétrtubetuberrr
.... −−=
Problème : déterminer et avec un tube défini de manière discrète.
dist nr
Distance obtenue par interpolationCarte de distances (résolution = 1mm)
22Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
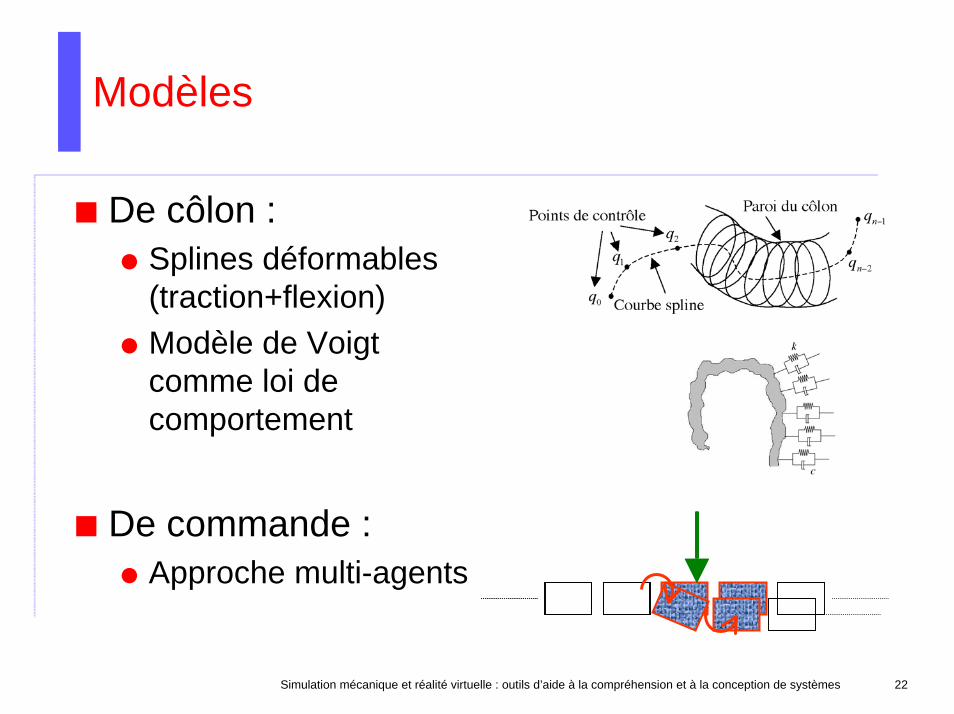
Modèles
De côlon :Splines déformables (traction+flexion)Modèle de Voigt comme loi de comportement
De commande :Approche multi-agents
23Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Passage d’un coude
QuickTime™ et undécompresseur codec YUV420
sont requis pour visionner cette image.
passif
QuickTime™ et undécompresseur codec YUV420
sont requis pour visionner cette image.
QuickTime™ et undécompresseur codec YUV420
sont requis pour visionner cette image.
contrôlé
Déformation =>Meilleure perception :
Modèle plus proche de la réalité
Contrôle =>Diminution des efforts :
Minimisation des risques
rigide
mou QuickTime™ et undécompresseur codec YUV420
sont requis pour visionner cette image.
24Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Opération de débouclage
QuickTime™ et undécompresseur codec YUV420
sont requis pour visionner cette image. Temps réelPrêt pour le passage àl’haptique
25Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
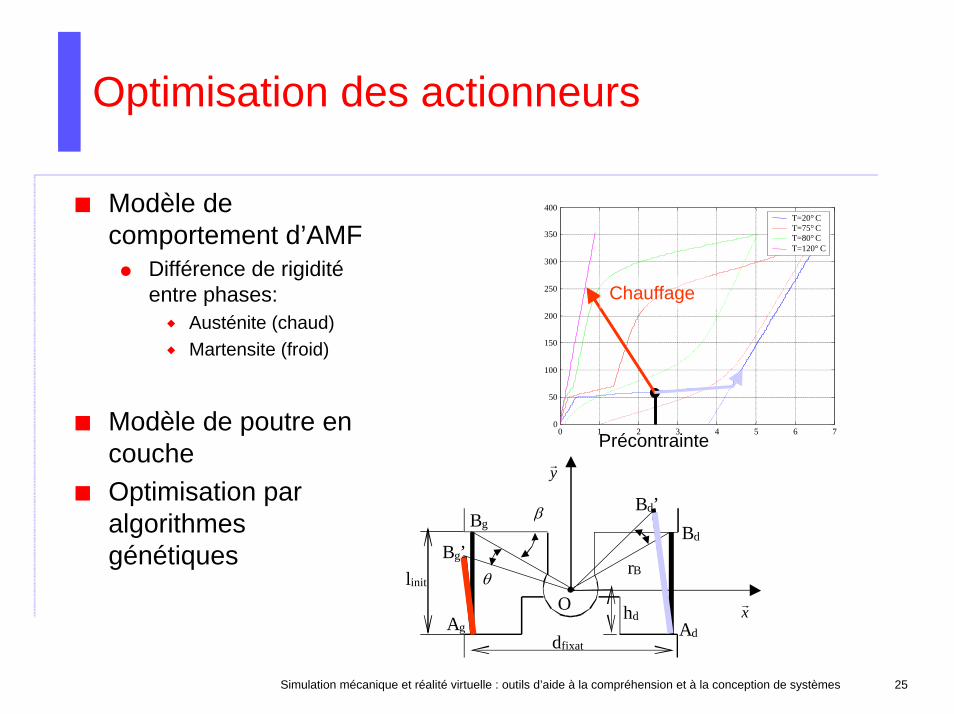
Optimisation des actionneurs
Modèle de comportement d’AMF
Différence de rigidité entre phases:
Austénite (chaud)Martensite (froid)
Modèle de poutre en coucheOptimisation par algorithmes génétiques
0 1 2 3 4 5 6 70
50
100
150
200
250
300
350
400T=20° CT=75° CT=80° CT=120° C
Précontrainte
Chauffage
O
dfixat
linit
hdAd
Bd
Bd’Bg
Bg’
Ag
rB
r y
r x
θ
β
26Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
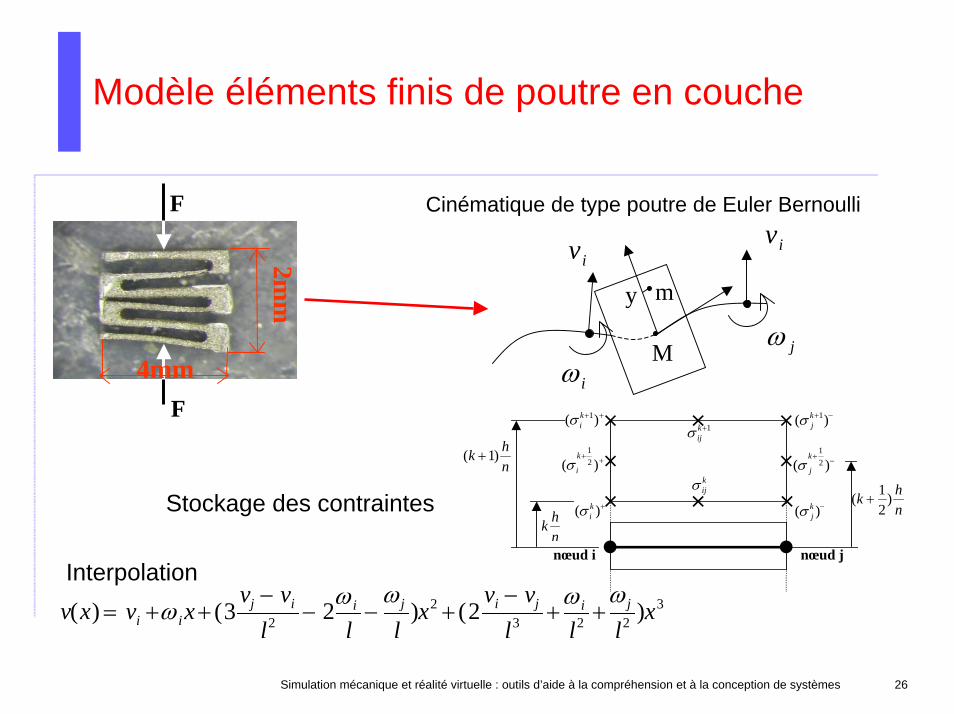
Modèle éléments finis de poutre en couche
Cinématique de type poutre de Euler Bernoulli
nœud i nœud j
k hn
(k +1) hn
(σ ik )+
(σ i
k+12 )+
(σ ik+1)+
(σ jk )−
(σ j
k+12 )−
(σ jk+1)−
(k +12
) hn
σ ijk
σ ijk+1
M
my
ω i
ω j
vivi
v(x) = vi +ω ix + (3vj
Stockage des contraintes
− vi
l2 − 2ω i
l−
ω j
l)x2 + (2
vi − vj
l3 +ω i
l2 +ω j
l2 )x3
Interpolation
F
F
2mm
4mm
27Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
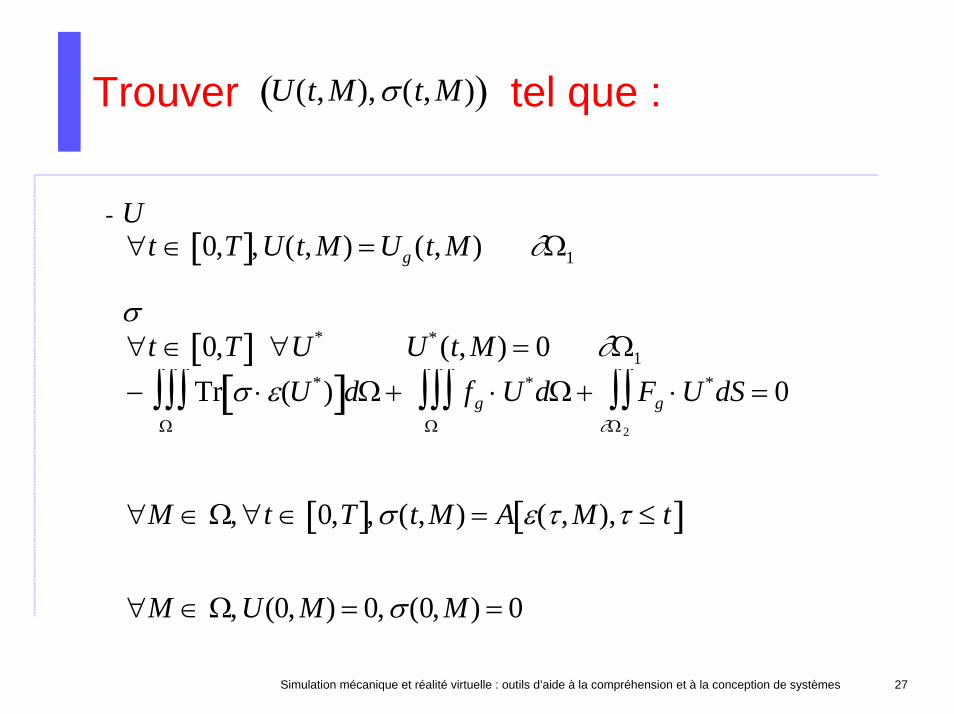
Trouver tel que :U(t,M),σ(t, M)( )
- U∀t ∈ 0,T[ ],U(t, M) = Ug (t, M) ∂Ω1
σ∀t ∈ 0,T[ ] ∀U* U*(t, M) = 0 ∂Ω1
− TrΩ∫∫∫ σ ⋅ ε(U*)[ ]dΩ + fg ⋅ U*dΩ
Ω∫∫∫ + Fg ⋅U*dS
∂Ω2
∫∫ = 0
∀M ∈ Ω, ∀t ∈ 0,T[ ], σ(t,M) = A ε(τ, M),τ ≤ t[ ]
∀M ∈ Ω, U(0, M) = 0, σ(0, M) = 0
28Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
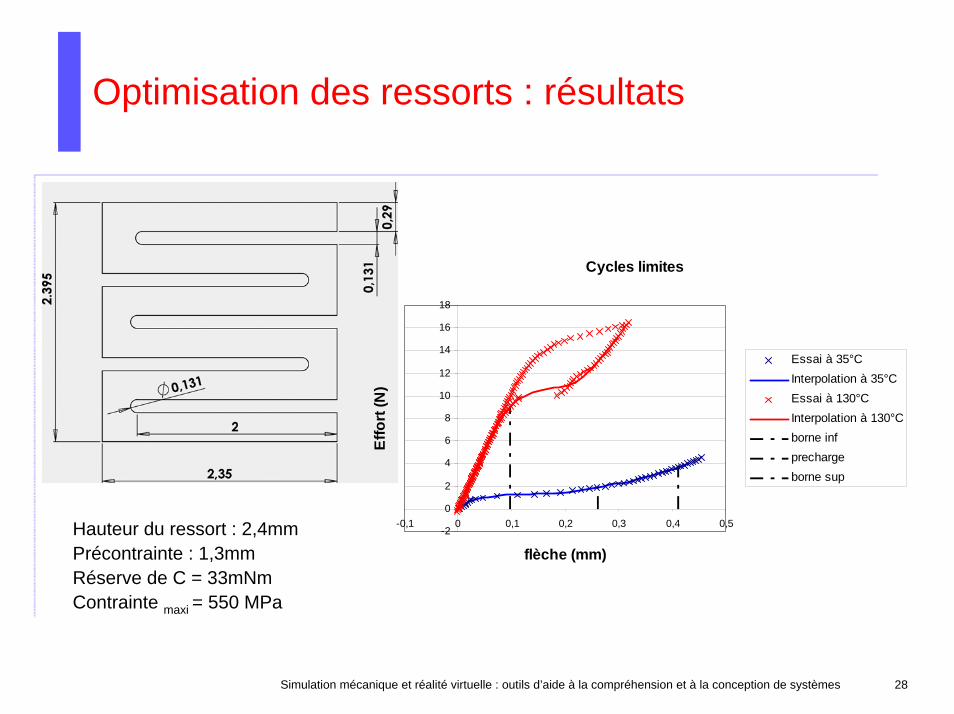
Optimisation des ressorts : résultats
Hauteur du ressort : 2,4mmPrécontrainte : 1,3mmRéserve de C = 33mNmContrainte maxi = 550 MPa
Cycles limites
-2
0
2
4
6
8
10
12
14
16
18
-0,1 0 0,1 0,2 0,3 0,4 0,5
flèche (mm)
Effo
rt (N
)Essai à 35°CInterpolation à 35°CEssai à 130°CInterpolation à 130°Cborne inf precharge borne sup
29Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Conclusion partielle
Modèles de calcul et de conceptionSimulateurOptimisationUne chaîne complète :
FaisabilitéIntérêt
Expérimentations complémentaires pour validationParamètres de loi de comportement du côlonValidation du modèle d’actionneur
30Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Interaction entre objets
CredoPrototypage virtuelInteractions entre objets
Couplage simulation/RVHumain virtuelPistes et conclusion
ProblématiqueContributionsConclusion partielle
31Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Améliorer la réponse
Modèle de contact et de choc
Solides rigidesDeux approches
BIPOP
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
32Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
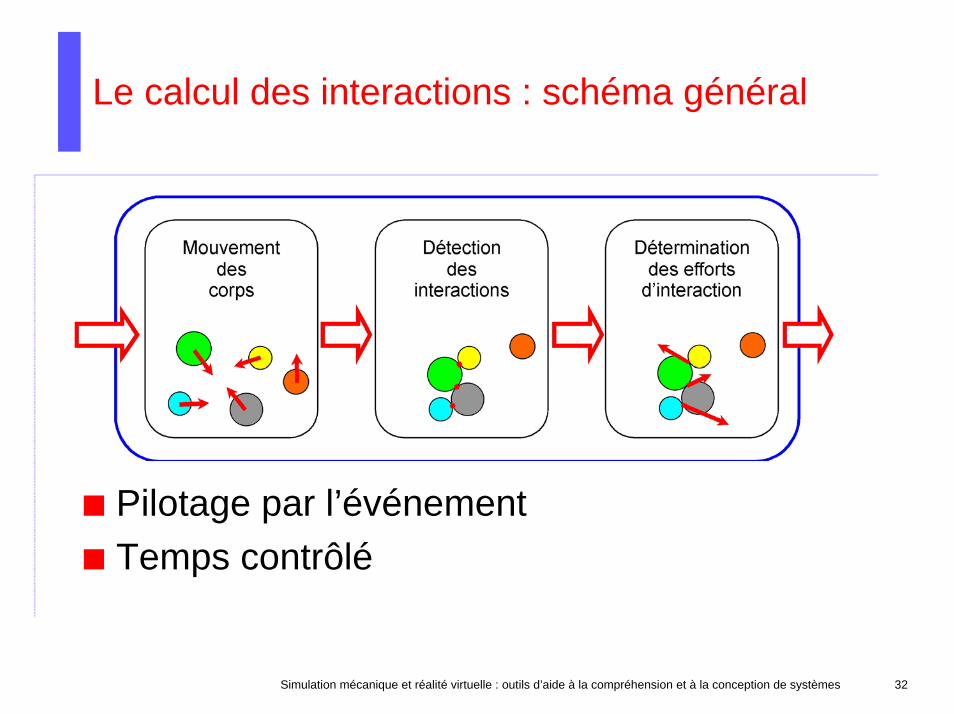
Le calcul des interactions : schéma général
Pilotage par l’événementTemps contrôlé
33Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
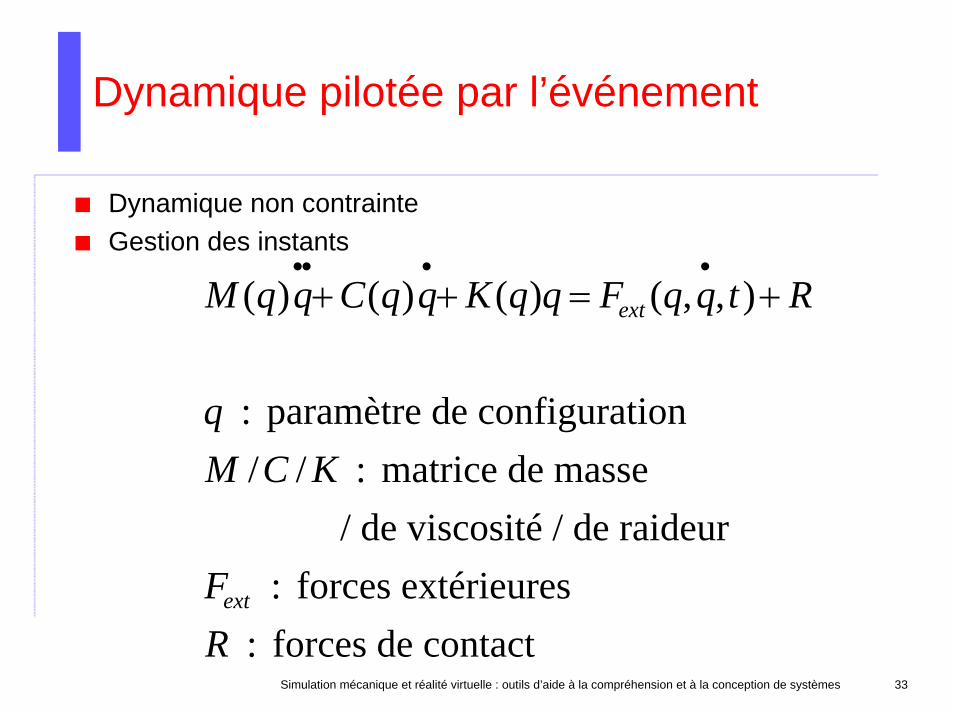
Dynamique pilotée par l’événement
M (q)q••
+ C(q)q•
+ K(q)q = Fext (q,q•
,t)+ R
q : paramètre de configurationM /C / K : matrice de masse / de viscosité / de raideurFext : forces extérieuresR : forces de contact
Dynamique non contrainteGestion des instants
34Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
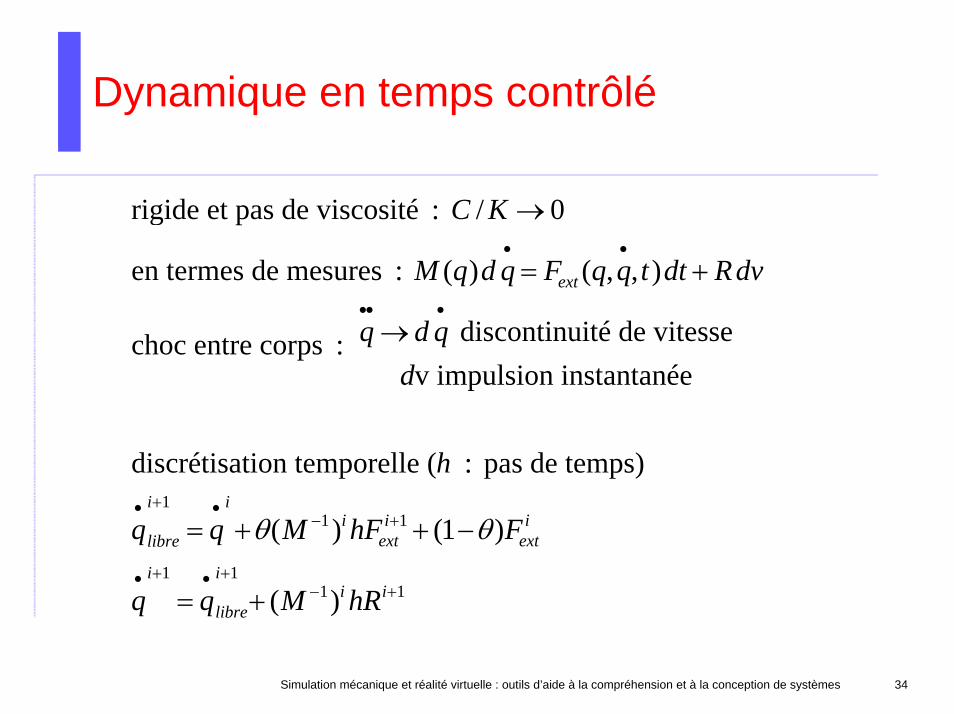
Dynamique en temps contrôlé
rigide et pas de viscosité : C / K → 0
en termes de mesures : M (q)d q•
= Fext (q,q•
,t)dt + Rdv
choc entre corps : q••
→ d q•
discontinuité de vitessedv impulsion instantanée
discrétisation temporelle (h : pas de temps)
q•
libre
i+1
= q• i
+θ(M −1)i hFexti+1 + (1−θ)Fext
i
q• i+1
= q•
libre
i+1
+ (M −1)i hRi+1
35Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
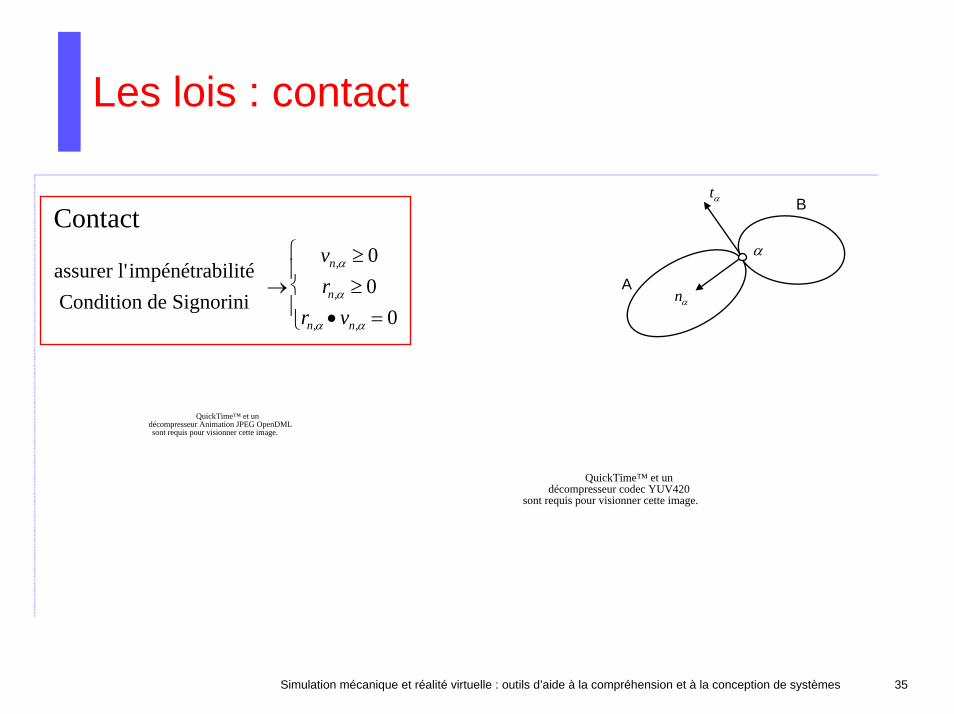
Les lois : contact
A
B
nα
tα
α
Contact
assurer l'impénétrabilitéCondition de Signorini
→vn,α ≥ 0rn,α ≥ 0
rn,α • vn,α = 0
⎧
⎨ ⎪
⎩ ⎪
QuickTime™ et undécompresseur Animation JPEG OpenDMLsont requis pour visionner cette image.
QuickTime™ et undécompresseur codec YUV420
sont requis pour visionner cette image.
36Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
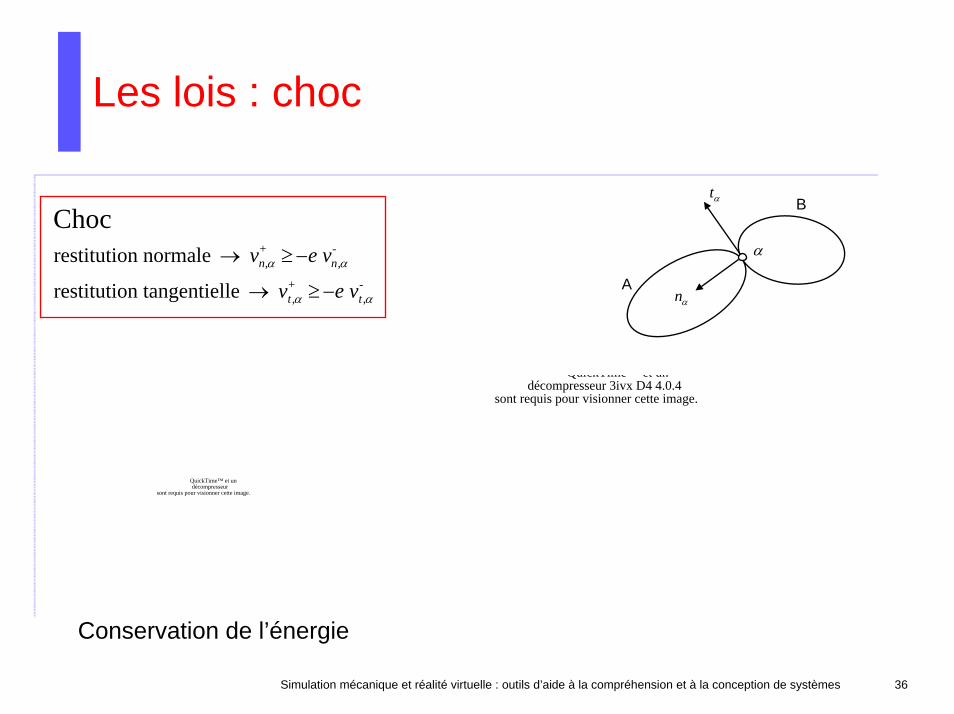
Les lois : choc
A
B
nα
tα
α
Chocrestitution normale → vn,α
+ ≥ −e vn,α-
restitution tangentielle → vt ,α+ ≥ −e vt ,α
-
QuickTime et undécompresseur 3ivx D4 4.0.4
sont requis pour visionner cette image.
QuickTime™ et undécompresseur
sont requis pour visionner cette image.
Conservation de l’énergie
37Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
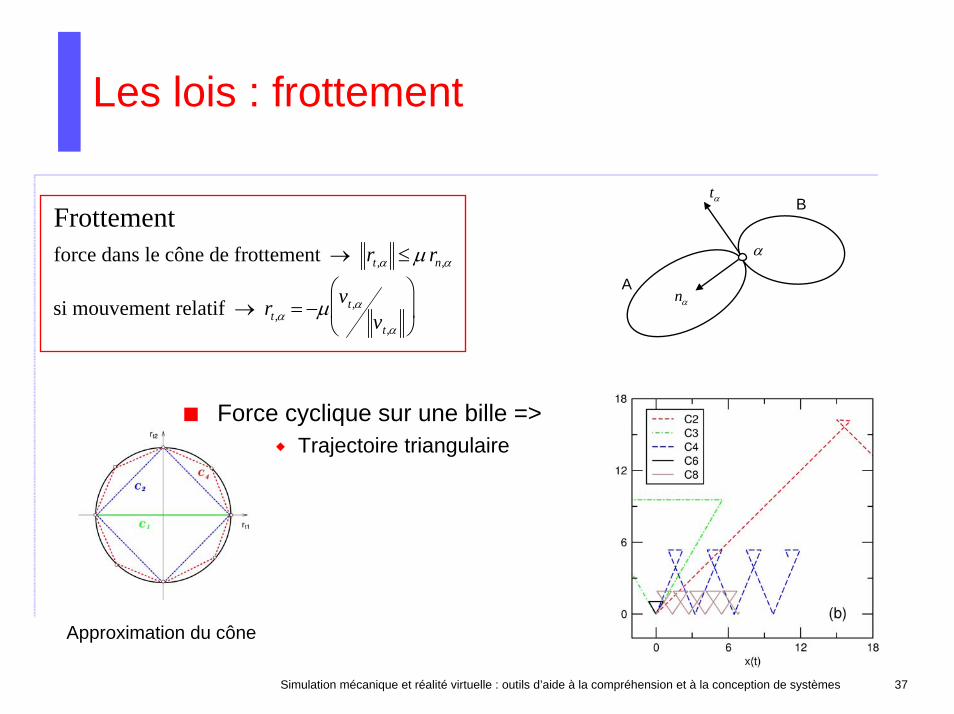
Les lois : frottement
A
B
nα
tα
α
Frottementforce dans le cône de frottement → rt ,α ≤ µ rn,α
si mouvement relatif → rt ,α = −µ vt ,α
vt,α
⎛
⎝ ⎜
⎞
⎠ ⎟
Force cyclique sur une bille =>Trajectoire triangulaire
Approximation du cône
38Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Les lois : frottement
A
B
nα
tα
α
Frottementforce dans le cône de frottement → rt ,α ≤ µ rn,α
si mouvement relatif → rt ,α = −µ vt ,α
vt,α
⎛
⎝ ⎜
⎞
⎠ ⎟
Qdécompresseur 3ivx D4 4.0.4
sont requis pour visionner cette image.
39Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Illustrations
QuickTime™ et undécompresseur Animation JPEG OpenDMLsont requis pour visionner cette image.
décompresseur Animation JPEG OpenDMLsont requis pour visionner cette image.
40Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Conclusion partielle
Deux méthodes en solides rigides : Pilotage par le temps :
Instant précis de l’interactionRetour en arrièreCalculs précis mais longs
Temps contrôléAdapté à l’interactionImpulsions moyennes seulement
Compromis entre :Le nombre d’objetsLa qualité de la simulationLe temps de calcul
Aller vers :Le couplage avec la détectionLe couplage entre rigide et déformableLe déformable pré-calculé pour enrichir le rigide
41Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Couplage simulation/RV
CredoPrototypage virtuelInteractions entre objetsCouplage simulation/RV
Humain virtuelPistes et conclusion
ProblématiqueContributionsConclusion partielle
42Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
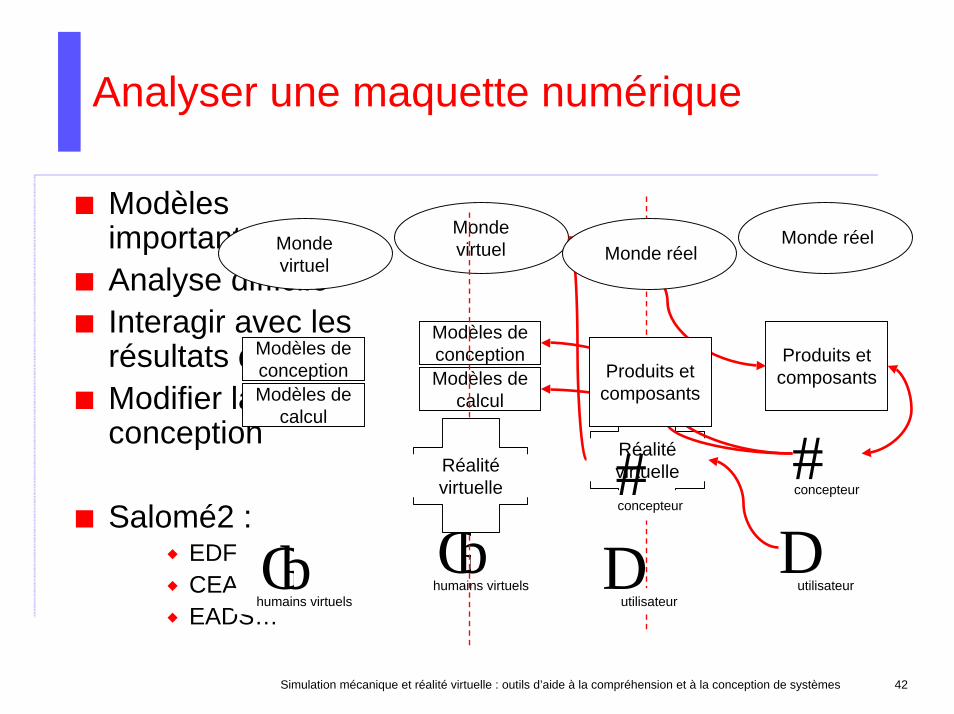
Analyser une maquette numérique
Modèles importantsAnalyse difficileInteragir avec les résultats de calculModifier la conception
Salomé2 : EDFCEAEADS…
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
43Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Problématique
Analyse interactive de maquettes numériques
Maquette numériqueModèle CAO
Géométrie fine4 000 000 de tétraèdres
Précision totale
Maquette virtuelleTemps réel
Géométrie limitée300 000 facettes
Précision dégradéeContrôle de la simplification
Gestion du multi-échelle
44Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
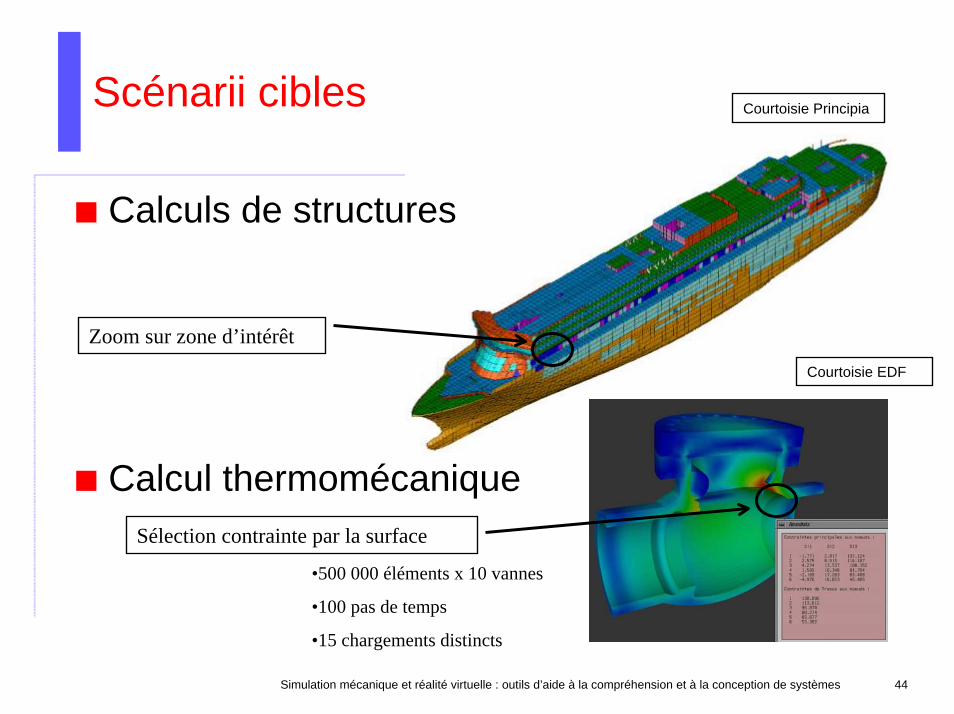
Scénarii cibles Courtoisie Principia
Calculs de structures
Calcul thermomécanique
Zoom sur zone d’intérêt
Sélection contrainte par la surface
•500 000 éléments x 10 vannes
•100 pas de temps
•15 chargements distincts
Courtoisie EDF
45Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
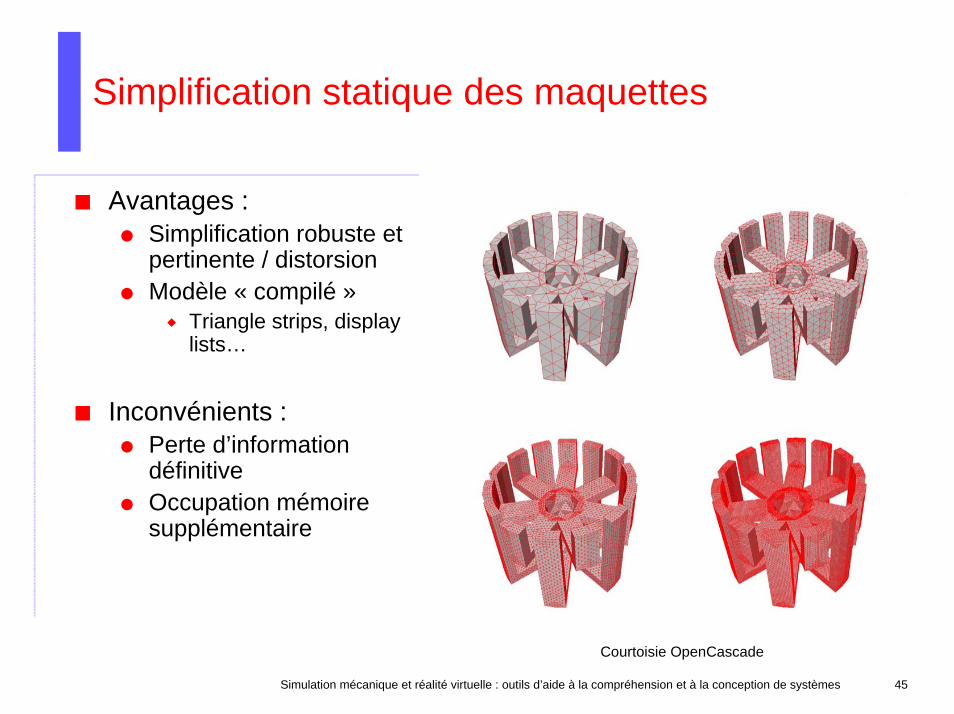
Simplification statique des maquettes
Avantages :Simplification robuste et pertinente / distorsionModèle « compilé »
Triangle strips, display lists…
Inconvénients :Perte d’information définitiveOccupation mémoire supplémentaire
Courtoisie OpenCascade
46Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
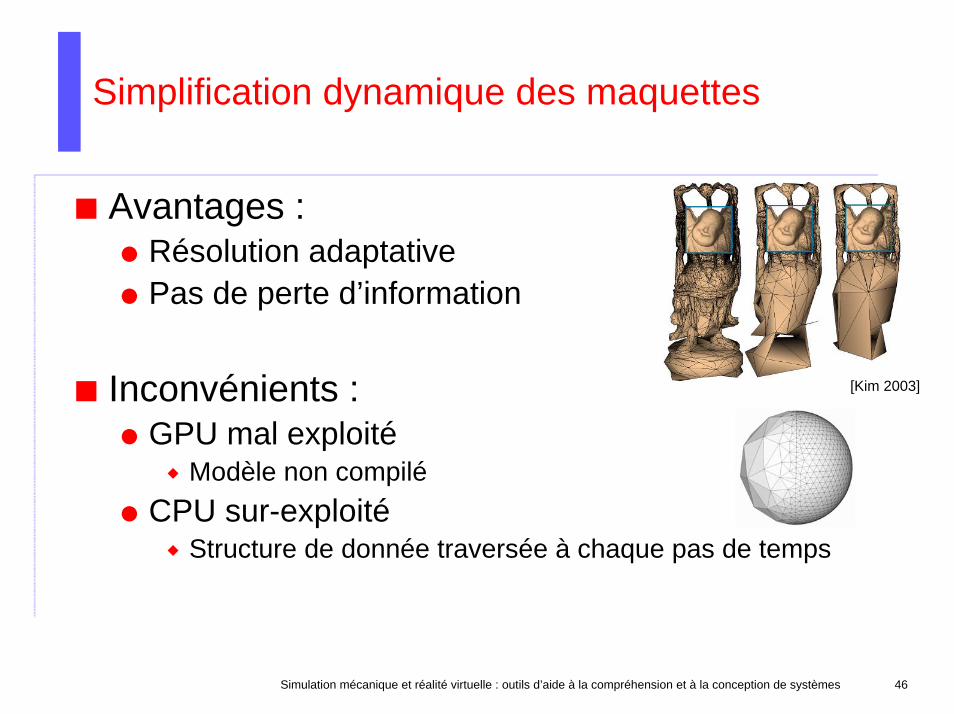
Simplification dynamique des maquettes
Avantages :Résolution adaptativePas de perte d’information
Inconvénients :GPU mal exploité
Modèle non compiléCPU sur-exploité
Structure de donnée traversée à chaque pas de temps
[Kim 2003]
47Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
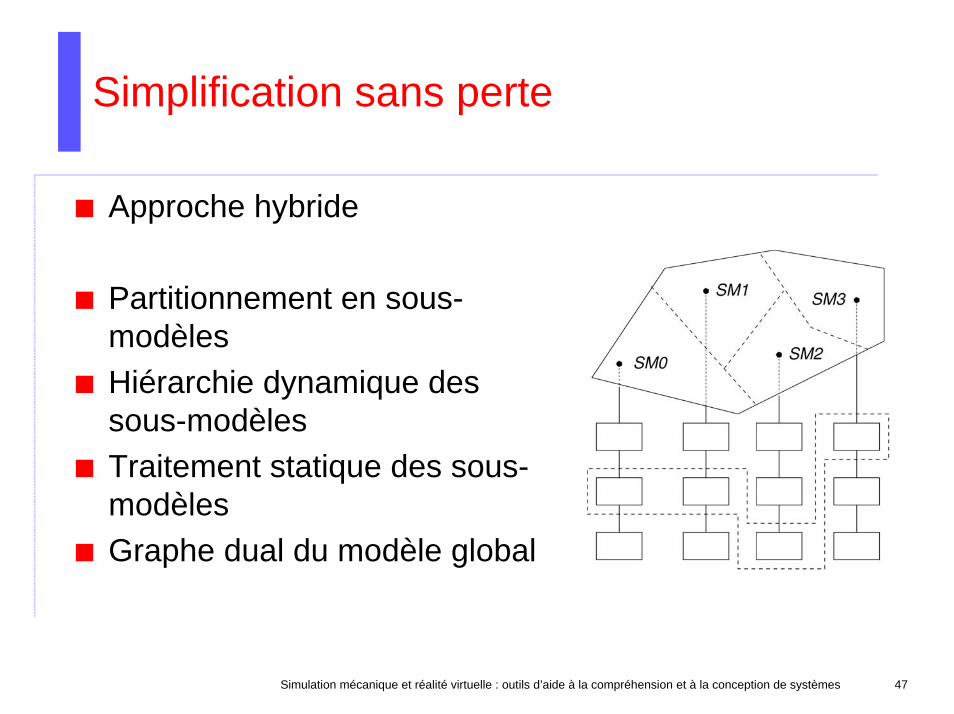
Simplification sans perte
Approche hybride
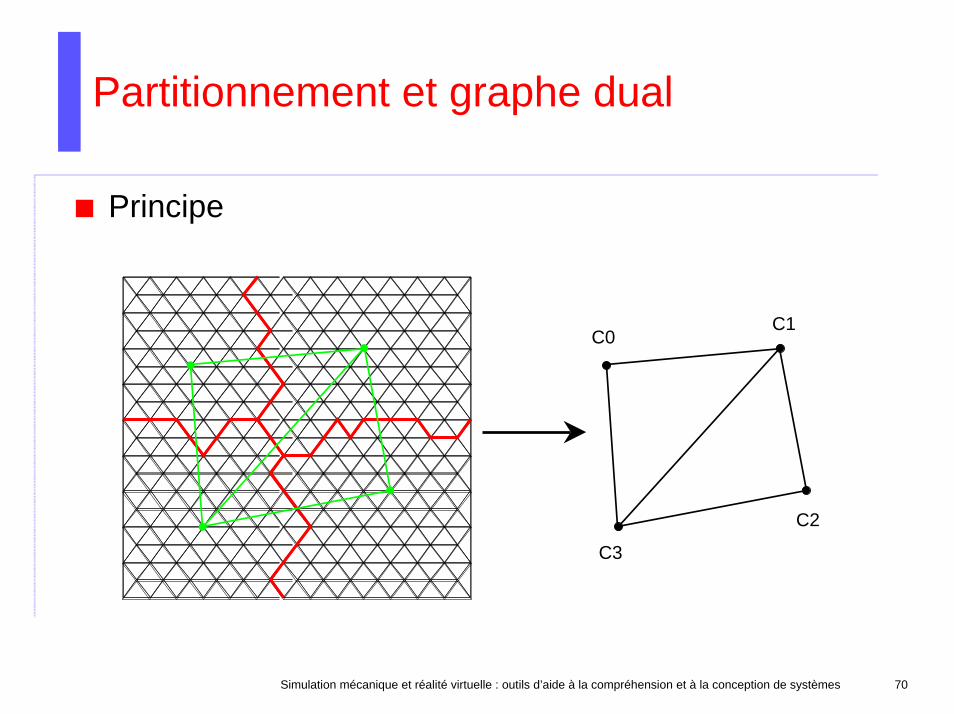
Partitionnement en sous-modèlesHiérarchie dynamique des sous-modèlesTraitement statique des sous-modèlesGraphe dual du modèle global
48Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
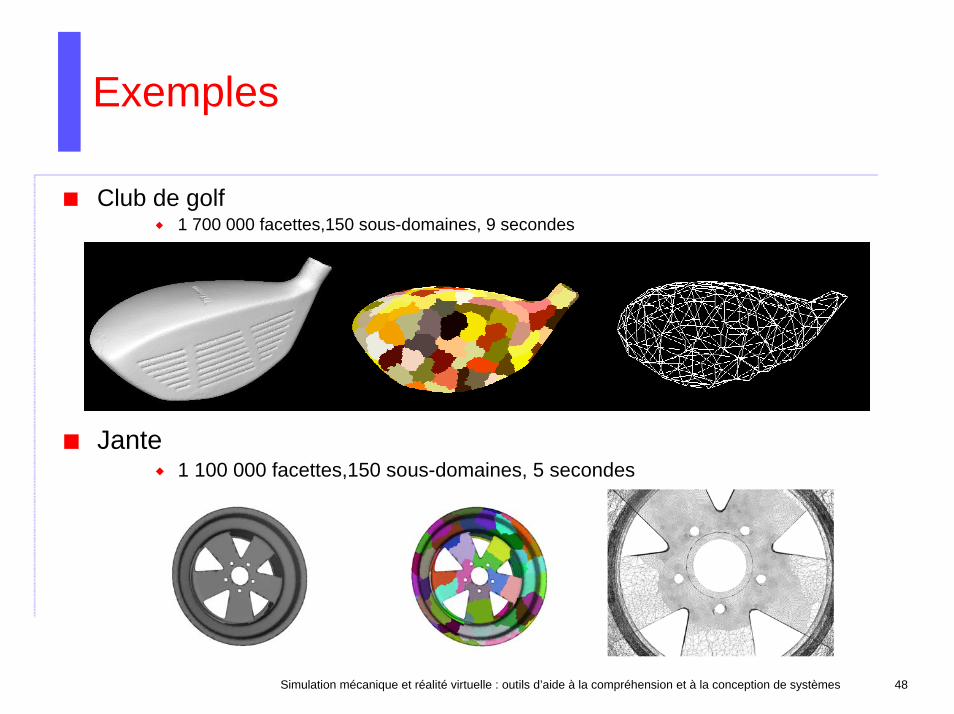
Exemples
Club de golf1 700 000 facettes,150 sous-domaines, 9 secondes
Jante1 100 000 facettes,150 sous-domaines, 5 secondes
49Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
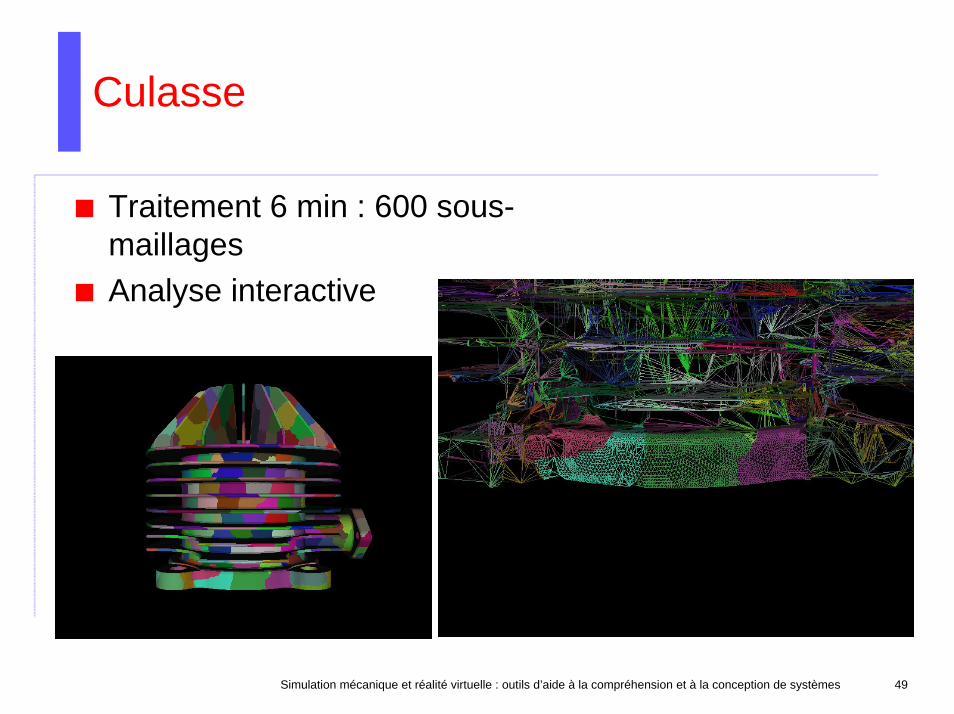
Culasse
Traitement 6 min : 600 sous-maillagesAnalyse interactive
50Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
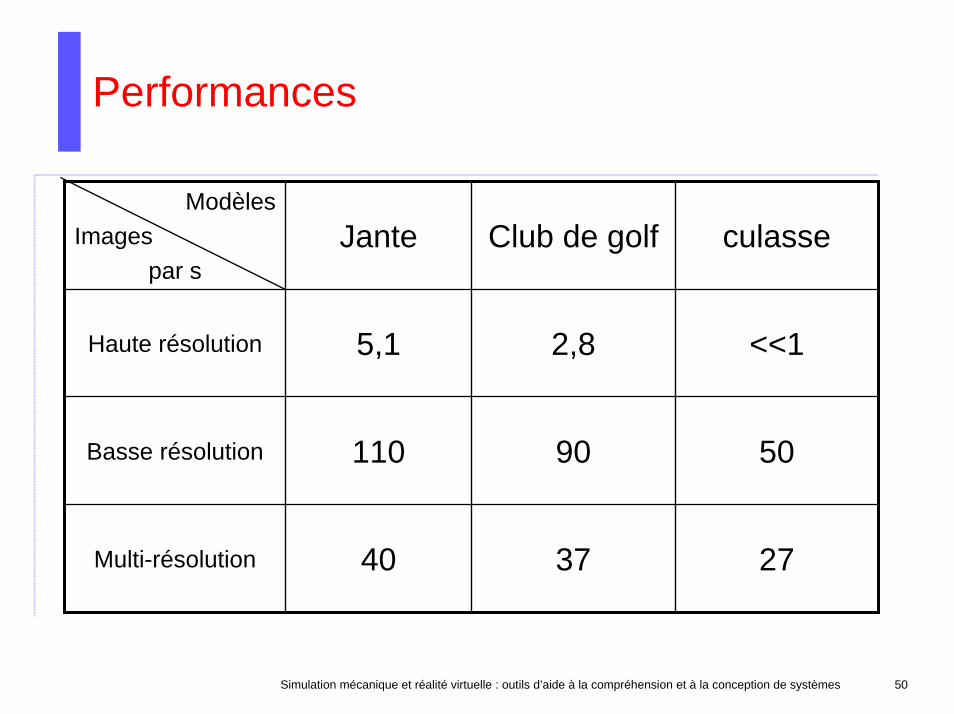
Performances
ModèlesImages
par sJante Club de golf culasse
Haute résolution 5,1 2,8 <<1
Basse résolution 110 90 50
Multi-résolution 40 37 27
51Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Conclusion partielle
Traitement interactif de maillages Sans perte d’informationpartitionnement
Mailles volumiquesPartitionnementSimplification
Évolution temporelleMaillage entièrement dynamique
Retour sur conception
52Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Humain virtuel
CredoPrototypage virtuelInteractions entre objetsCouplage simulation/RVHumain virtuel
Pistes et conclusion
ProblématiqueContributionsConclusion partielle
53Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
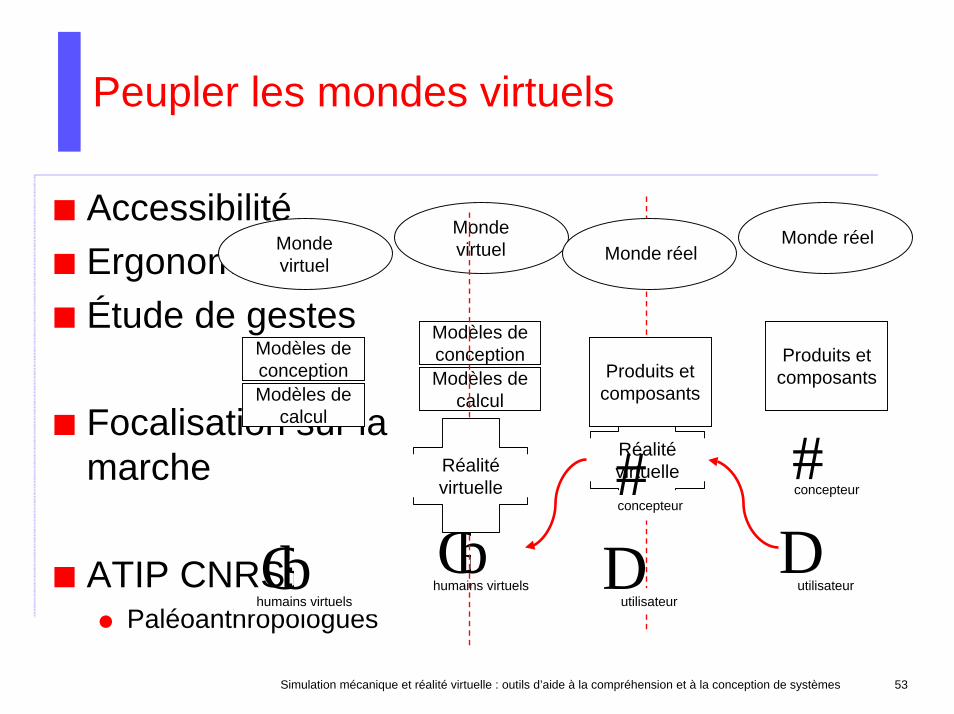
Peupler les mondes virtuels
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
AccessibilitéErgonomieÉtude de gestes
Focalisation sur la marche
ATIP CNRS:Paléoanthropologues
Modèles de conceptionModèles de
calcul
humains virtuelsbG
concepteur#
utilisateurD
Produits et composants
Monde virtuel Monde réel
Réalitévirtuelle
54Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Simulation de la marche
Adaptation de mouvementImportantes bases de donnéesReprésentation synthétique du mouvementAdaptation morphologiqueInterpolation
Dynamique inverse et directeMouvements plus lissesAccès aux efforts/couples : pénibilitéCalcul des couples (asservissement)
55Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
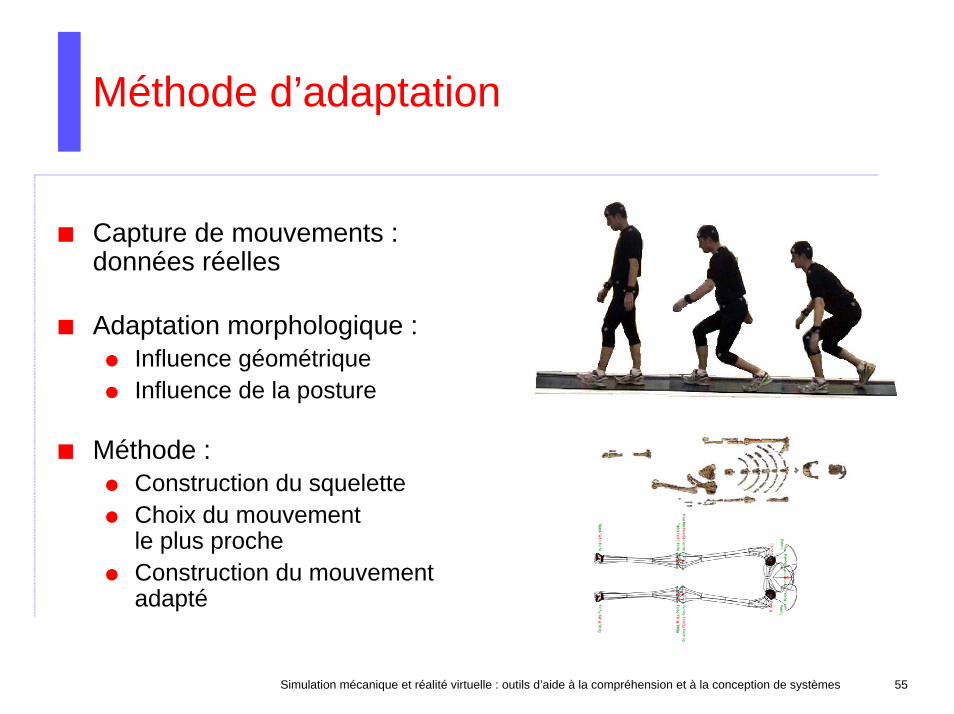
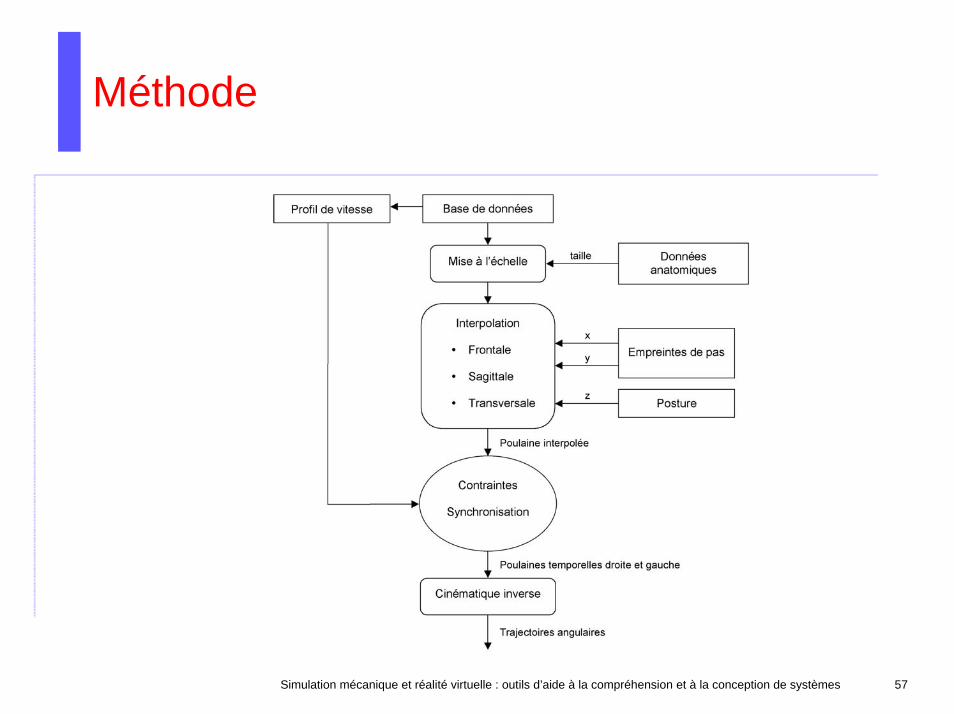
Méthode d’adaptation
Capture de mouvements : données réelles
Adaptation morphologique :Influence géométriqueInfluence de la posture
Méthode :Construction du squeletteChoix du mouvementle plus procheConstruction du mouvement adapté
56Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
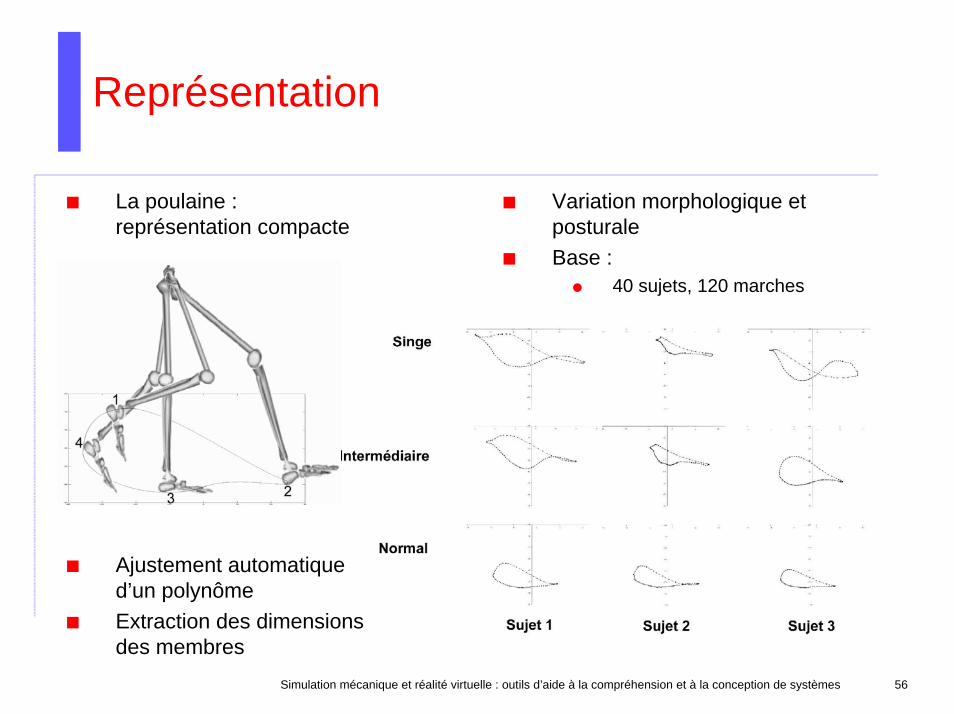
Représentation
La poulaine : représentation compacte
Variation morphologique et posturaleBase :
40 sujets, 120 marches
Ajustement automatique d’un polynômeExtraction des dimensions des membres
57Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Méthode
58Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
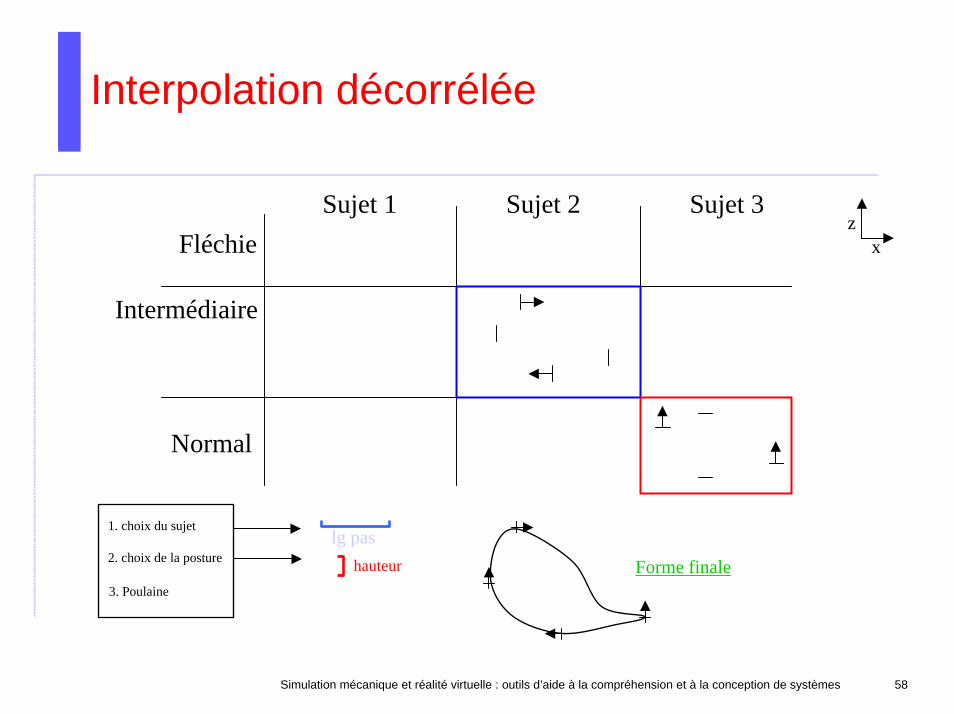
Interpolation décorrélée
Fléchie
Intermédiaire
Normal
Sujet 1 Sujet 2 Sujet 3x
z
lg pas1. choix du sujet
2. choix de la posture
3. Poulaine
hauteur Forme finale
59Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Résultats
QuickTime™ et undécompresseur H.264
sont requis pour visionner cette image.
60Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
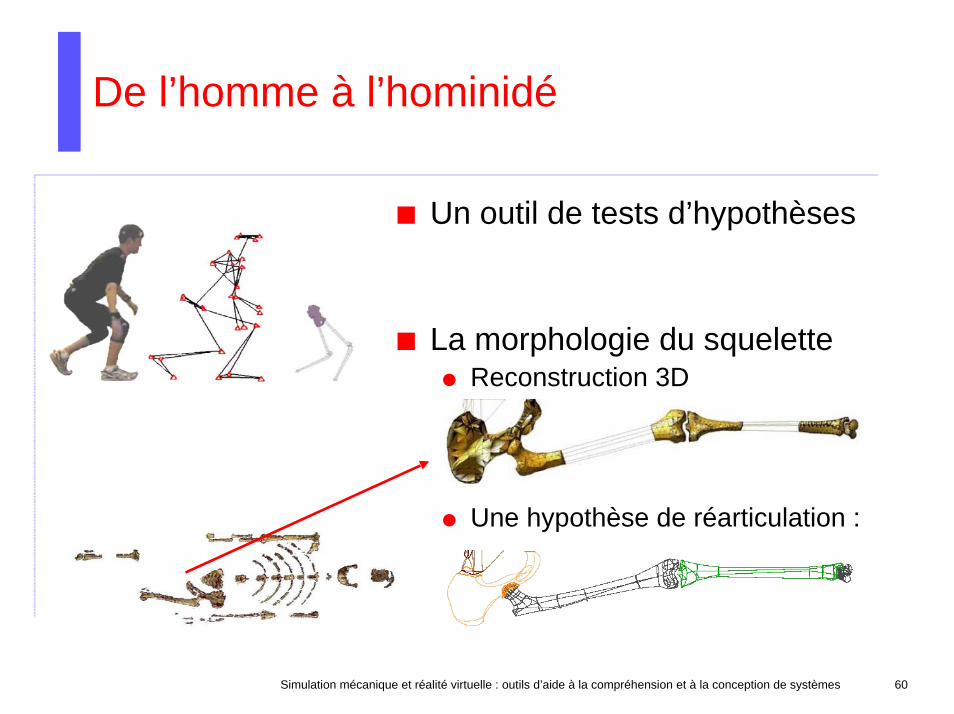
De l’homme à l’hominidé
Un outil de tests d’hypothèses
La morphologie du squeletteReconstruction 3D
Une hypothèse de réarticulation :
61Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
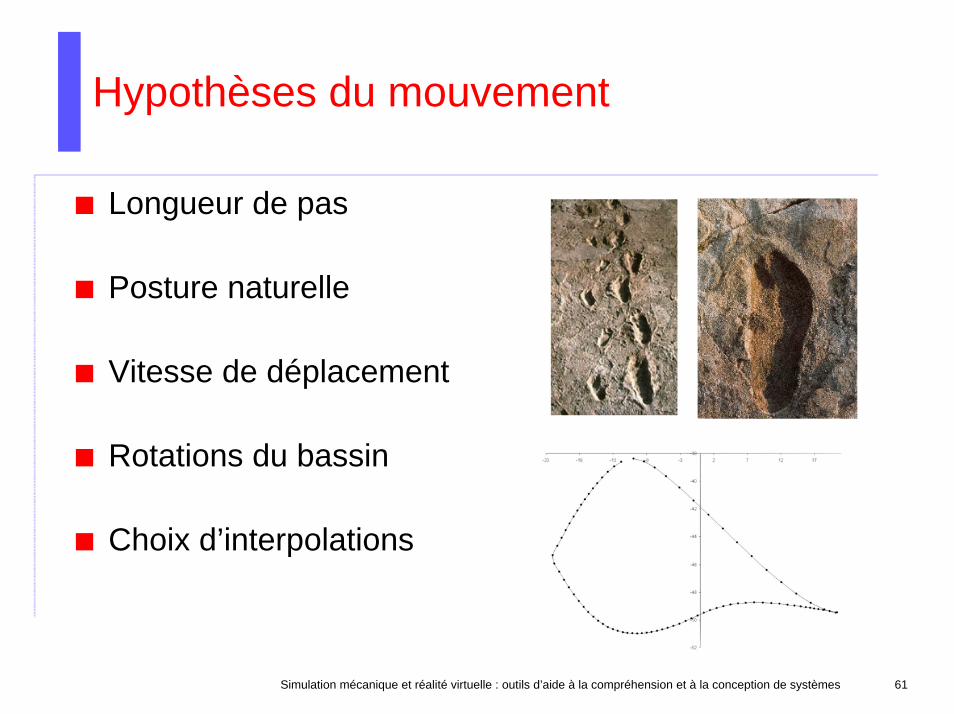
Hypothèses du mouvement
Longueur de pas
Posture naturelle
Vitesse de déplacement
Rotations du bassin
Choix d’interpolations
62Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Lucy : australopithecus afarensis
QuickTime™ et undécompresseur H.264
sont requis pour visionner cette image.
QuickTime™ et undécompresseur H.264
sont requis pour visionner cette image.
Longueur de pas Posture
63Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Conclusion et perspectives
Création d’un mouvement de marche adapté à:une morphologieune posture
Captures de mouvements réelsReprésentation spécifique et interpolation
Augmentation de la base de donnéesD’autres mouvements :
Haut du corpsPréhension
De la mécaniqueDynamique directe et inverse
64Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Pistes et conclusion
CredoPrototypage virtuelInteractions entre objetsCouplage simulation/RVHumain virtuelPistes et conclusion
65Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Conclusion
Prototype virtuelChaîne complète et modèles simplifiésProblématique de la validité de l’objectif pour la conception
Modèles d’interactionApproches en ligneCouplage avec la détectionProblématique du multi-échelle et du pré-calcul hors ligne
Analyse de résultatsAide à l’analyseProblématique du retour sur conception
Humain virtuelLa marcheAller vers la dynamique : causes du mouvementProblématique de la plausibilité
66Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Multi-représentation et hiérarchie
Multi-modèlesSolides rigides et solides déformables
– Niveau d’observation
Humain virtuel hiérarchique– Déplacement– Préhension
Multi-fréquencesPhénomènes de temps caractéristiques différents
– Niveau d’observation

67Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Les contributeurs
Christofer Kühl (thèse)Guillermo Andrade (post-doc)Mathieu Renouf (post-doc)Frédéric Beauchamp (thèse)Jean-Marie Souffez (DEA + thèse)Nicolas Pronost (DEA + thèse)Sébastien Gouleau (DEA)
Merci de votre attention
68Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Merci de votre attention
69Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Implications
Contrôle de la simplificationSimplification statique ?
ok pour maquette virtuelleSimplification dynamique ?
ok pour maquette numérique
Gestion du multi-échelleNe pas perdre la pertinence originale du modèleUne perte d’information est inacceptable
70Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
Partitionnement et graphe dual
Principe
C0C1
C2
C3
71Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
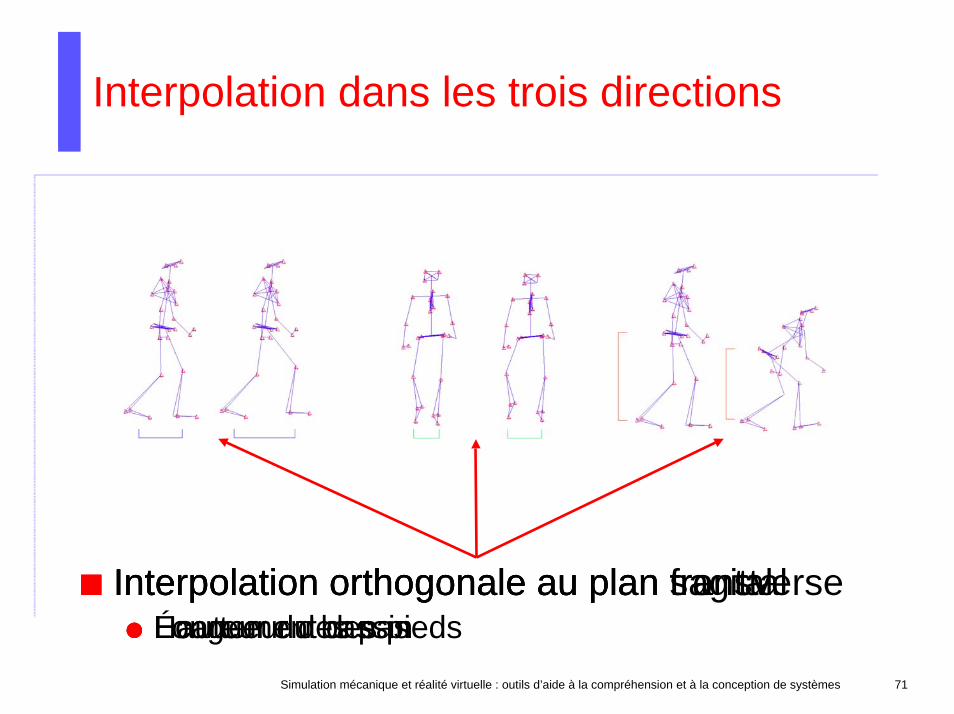
Interpolation orthogonale au plan transverseHauteur du bassin
Interpolation orthogonale au plan frontalLongueur des pas
Interpolation orthogonale au plan sagittalÉcartement des pieds
Interpolation dans les trois directions
72Simulation mécanique et réalité virtuelle : outils d’aide à la compréhension et à la conception de systèmes
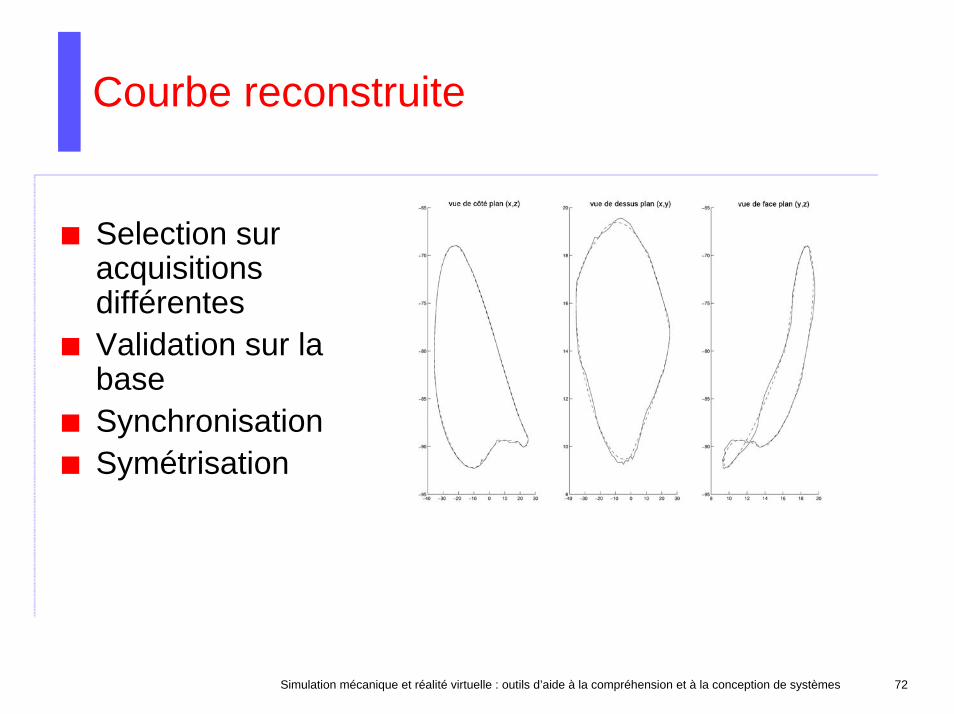
Courbe reconstruite
Selection sur acquisitions différentesValidation sur la baseSynchronisationSymétrisation


















