
Simulation-aided Homologation of ESP Systems for NAFTA ... · Simulation-aided Homologation of ESP...
13
Simulation-aided Homologation of ESP Systems for NAFTA Vans by Software-in-the-Loop Simulation Klaus Wüst, Daimler AG Albert Lutz, Robert Bosch GmbH IPG Technology Conference Ettlingen, 18.-19. September 2012 Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Transcript of Simulation-aided Homologation of ESP Systems for NAFTA ... · Simulation-aided Homologation of ESP...

Simulation-aided Homologation of ESP Systems for NAFTA Vans by Software-in-the-Loop Simulation
Klaus Wüst, Daimler AG Albert Lutz, Robert Bosch GmbH
IPG Technology ConferenceEttlingen, 18.-19. September 2012
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

2
• ESP homologation by simulation –background of legislation
• Simulation environment -SiL exchange platform OEM/supplier
• Proof of functionality for vehicle variantson the basis of a validated “MasterCar”
• Results of the survey, robustness
• Banked curves robustness check
• Conclusion
Agenda
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

3
ESP homologation by simulation – background
• In Europe:Mandatory introduction of ESP systems for passenger cars and for trucks or buses via ECE-R13 and ECE-R13H
• ECE-R13 and –R13H allow homologation by simulation –either by HiL test stands or by SiL simulation
• Type approval by simulation at Daimler Trucks since 2011 –Simulation tool EBSim (Simpack models with SiL codes)
• Various driving maneuvers without precise criteria for trucks, maneuver “sine with dwell” for passenger cars, includingpass/fail criteria
• For NAFTA region:Mandatory introduction of ESP systems for passenger carsvia FMVSS 126, maneuver “sine with dwell”, self-certification (no type approval by authorities)
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
4
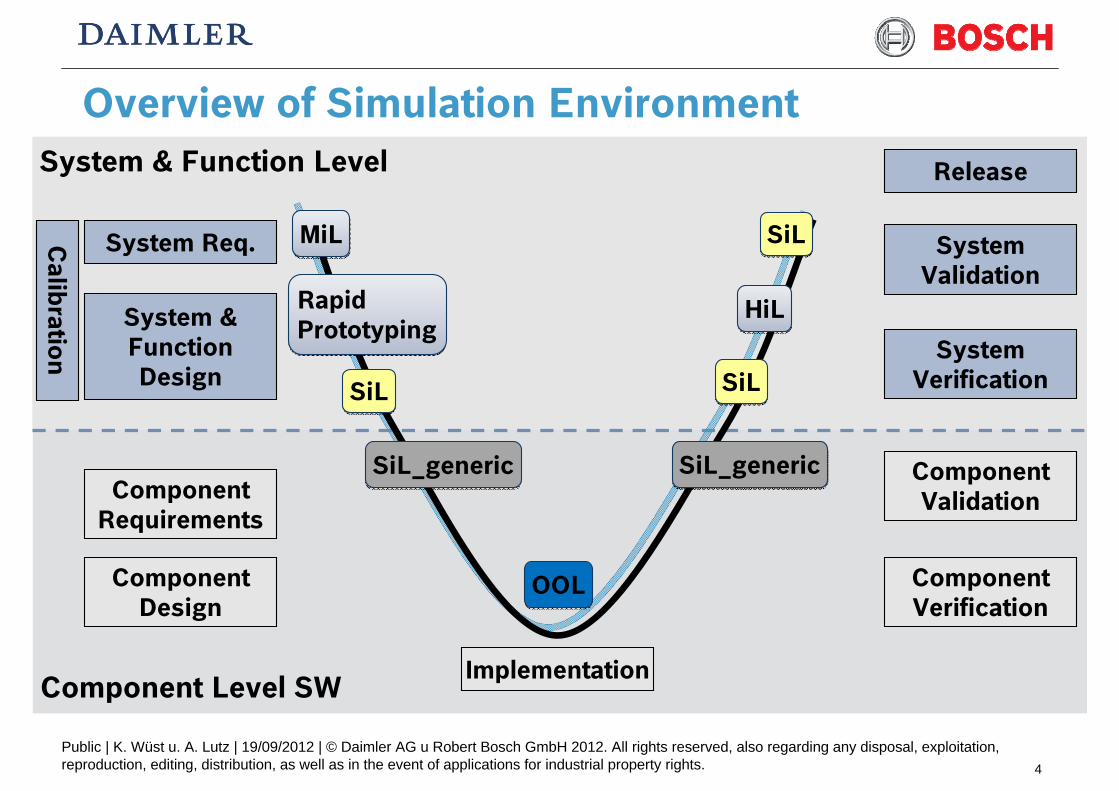
Overview of Simulation EnvironmentSystem & Function Level
Component Level SW
ComponentDesign
Implementation
Release
System &FunctionDesign
ComponentRequirements
System Req.
ComponentVerification
ComponentValidation
SystemVerification
SystemValidation
Calibration
SiLSiL
SiL_genericSiL_generic
HiLHiL
SiL_genericSiL_generic
SiLSiL
RapidPrototypingRapidPrototyping
MiLMiL
SiLSiL
OOLOOL
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

5
Set-up simulation environment
Actuation & ESP signals
Vehicle, Driver,
Environment, OEM-control inputs
Parameter modification
BOSCH
Vehicle dynamics simulation tools Vehicle, road, driver model OEM control systems OEM test automation
ESP-Simulation tool Control, sensor, brake model New braking system models Driver assistance
ESP internalsignal trace*.d97Animation
CM-Signal trace*.erg, *.info
Combined trace fileDaimler
CSSim
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
6
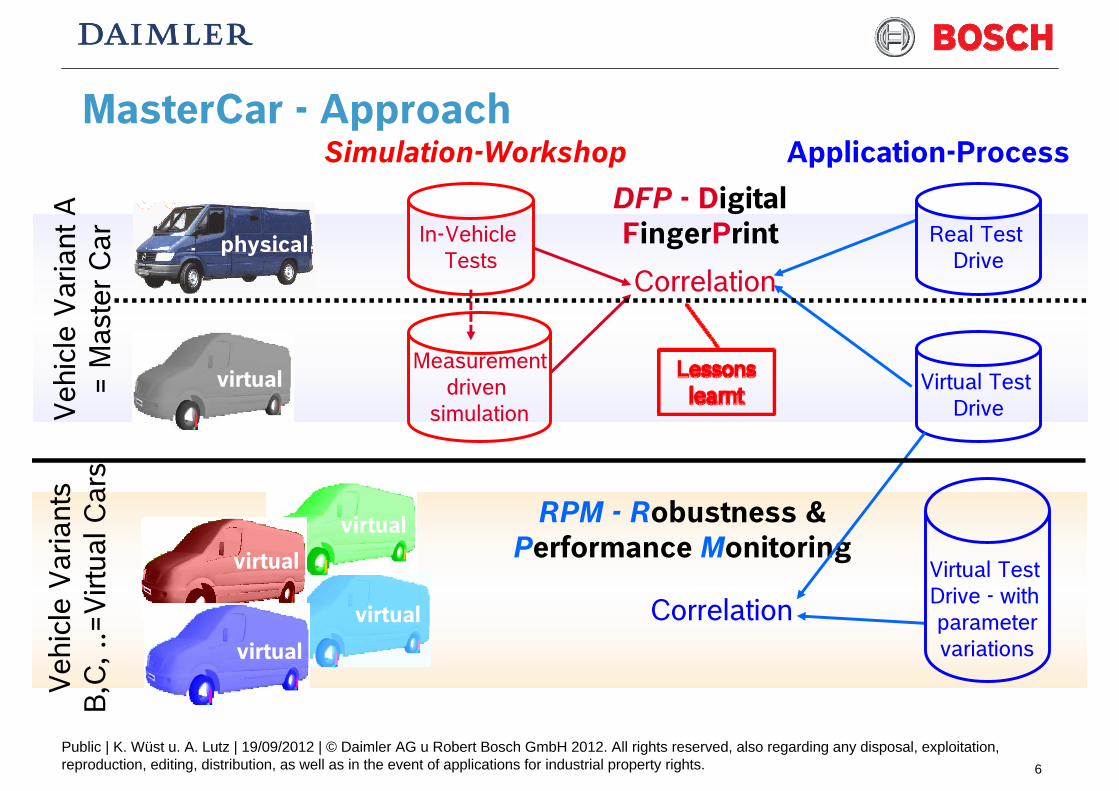
MasterCar - Approach
physical
Veh
icle
Var
iant
s B
,C, .
.=V
irtua
l Car
s
virtual
virtual
virtual
virtual
virtual
Simulation-Workshop
RPM - Robustness & Performance Monitoring
Veh
icle
Var
iant
A
= M
aste
r Car
Application-Process
In-Vehicle Tests
DFP - Digital FingerPrint
Measurementdriven
simulation
Real Test Drive
Virtual Test Drive
Virtual Test Drive - with parametervariations
Correlation
Correlation
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

7
Validation of van vehicle dynamics using the “MasterCar”
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
• Step 1:Proof of tire characteristics (MFTYRE)
• Step 2:Measurement of 4 vehicle variants
• Step 3:Validation of steady state driving behavior
• Step 3:Validation of transient driving behavior
• Step 4:Validation of sine with dwell with ESC interventionsComparison Measurement with ESC / Simulationwith ESC / Simulation without ESC,Vehicle yaw velocity as a response to 200°steering wheel amplitude
-50
-40
-30
-20
-10
0
10
20
30
40
14 16 18 20 22 24
ZeitG
ierg
esch
win
digk
eit
Yaw Velocity vs. Time

8
The simulation covers a wide range of vehicle variants• Examples for the vehicle variety (Sprinter for NAFTA market):
• 2 GVW variants, 2 wheelbases, 2 heights, 2 versions of rear overhang, bus or goods transport, 4 suspension variants, 3 tire variants approx. 120 possible variations
• Additional: variation of loading conditions (laden/unladen, c.o.g position)
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

9
Results of the survey, robustness
• All simulated vehicle variants have fulfilled the evaluation criteria
• Step-by-step identification of worst case vehicle variants
• Example result:Comparison between ESP8 and ESP9 code for one vehicle variant
Vergl ESP8 ESP9Nafta KAWA 3.88t R2 LH2 CF2 C39
0
0.5
1
1.5
2
2.5
3
3.5
4
0 50 100 150 200 250 300
LW- Amplitude
Seite
nver
satz
1.0
71s
nach
Len
kbeg
inn
ESP8
ESP9
Vergl ESp8 ESP9Nafta KAWA 3.88t R2 LH2 CF2 C39
-100
-80
-60
-40
-20
0
20
40
60
80
100
0 50 100 150 200 250 300
LW-Amplitude
Nor
m. G
ierg
esch
w 1
s na
ch M
anöv
eren
de
ESP8
ESP9
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

10
Additional ESP-Robustness Check: Banked Curves
Initial radius
Final radius
Elevation
Trajectory
Curvature
Tracks:
• Synthetic (S-Curve)
• Test-center (PBx)
• Public Road (cross-country up to Great Ocean Road)
Track X-Coordinate [m] Track Length [m]
Ele
vatio
n [ra
d]
Trac
k Y
-Coo
rdin
ate
[m]
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

11
Track Analysis:Elevation ≥ x°
Banked Curve Detection:Counter-Values
Counter 1
Counter 2
Yaw Rate
Covering Criteria
Curve Entering
Counter 1 Counter 2
Covering
Additional ESP-Robustness Check: Banked Curves
Time [s]
MeasurementSimulation
Yaw
Rat
e [ra
d/s]
Lat.
Acc
eler
atio
n [m
/s2 ]
Time [s]
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

12
• Daimler and Bosch have successfully estab-lished an exchange platform for the simulation of van vehicle dynamics with active systems.
• The SiL platform is used for type approval investigations of ESP system as well as for investigations of a large amount of vehiclevariants and for robustness investigations.
• In future, this SiL process will also be used for other driver assistance systems, furthermoreimplementing additionally the tools IPG Test-Manager and QTronic TestWeaver.
Conclusion
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

13
Thank you for your attention!
Questions?
Public | K. Wüst u. A. Lutz | 19/09/2012 | © Daimler AG u Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.








![Homologation paper list- Manufacturers[7]](https://static.fdocuments.net/doc/165x107/58944f3b1a28ab40618b6736/homologation-paper-list-manufacturers7.jpg)









