Simulated EV Dynamics: Safety & eTVC -...
22
ARTEMIS Pollux Project Simulated EV Dynamics: Safety & eTVC 26.09.11 ARTEMIS POLLUX Project Process Oriented eLectronic controL Units for Electric Vehicles Developed on a Multi-System Real-Time Embedded Platform Dr. Stephen Jones et. al., AVL List GmbH [email protected] +43 316 787 4484
Transcript of Simulated EV Dynamics: Safety & eTVC -...
ARTEMIS Pollux Project
Simulated EV Dynamics: Safety & eTVC
26.09.11
ARTEMIS POLLUX Project Process Oriented eLectronic controL Units for Electric Vehicles Developed on a Multi-System Real-Time Embedded Platform
Dr. Stephen Jones et. al., AVL List GmbH [email protected] +43 316 787 4484
ARTEMIS Pollux Project
Simulated EV Dynamics Content
Introduction
Co-Simulation Toolchain of CRUISE & CarMaker
E-Machine Failure Analysis in Simulation
E-Torque Vectoring Control (eTVC)
Effect of eTVC on E-Machine Failure
Summary & Next Steps
2

ARTEMIS Pollux Project
Introduction
Pure battery Electric Vehicle with 4 e-machines to drive 4 wheels independently.
AVL works on the toolchain development of 1D powertrain tool (AVL CRUISE) with 3D vehicle lateral dynamics simulation tool (IPG CarMaker).
Hazard and Risk Assessment of e-machine failure with simulation analysis.
Development and validation of e-Torque Vectoring control software.
3

ARTEMIS Pollux Project
Simulated EV Dynamics Content
Introduction
Co-Simulation Toolchain of CRUISE & CarMaker
E-Machine Failure Analysis in Simulation
E-Torque Vectoring Control (eTVC)
Effect of eTVC on E-Machine Failure
Summary & Next Steps
4
ARTEMIS Pollux Project 5
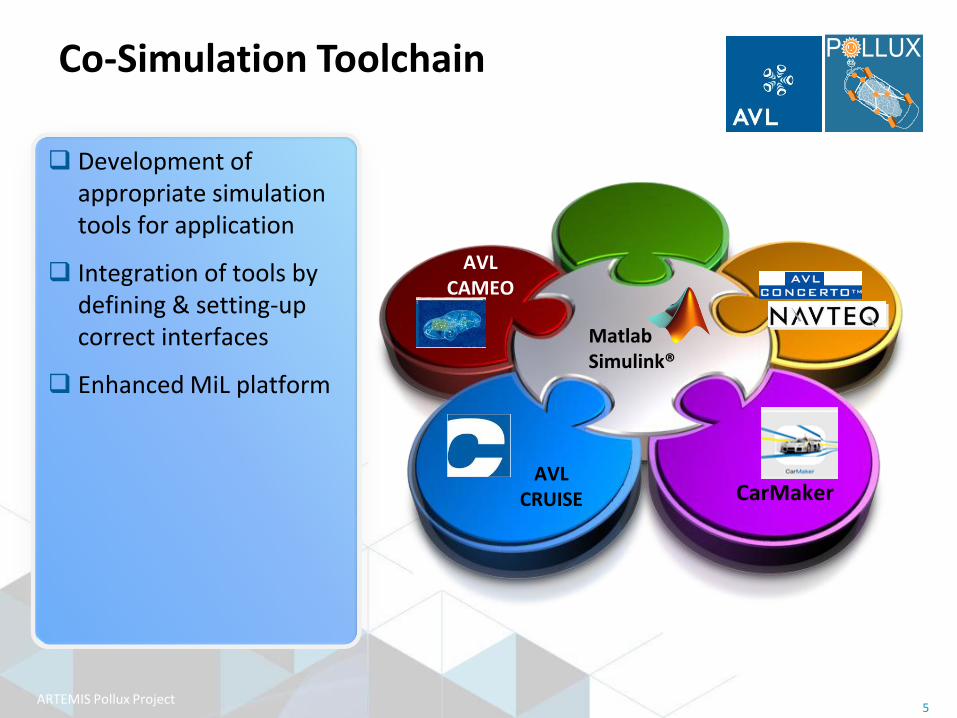
AVL CRUISE CarMaker
Matlab Simulink®
AVL CAMEO
Development of appropriate simulation tools for application
Integration of tools by defining & setting-up correct interfaces
Enhanced MiL platform
Co-Simulation Toolchain

ARTEMIS Pollux Project
Overview of Pollux Project 2012 Content
Introduction
Co-Simulation Toolchain of CRUISE & CarMaker
E-Machine Failure Analysis in Simulation
E-Torque Vectoring Control (eTVC)
Effect of eTVC on E-Machine Failure
Summary & Next Steps
6
ARTEMIS Pollux Project
E-Machine Failure Analysis
A series of simulation run in the toolchain with certain e-machine failures.
Safety simulation for ISO26262 and virtual Hazard Severity Rating in early concept phase.
7
ARTEMIS Pollux Project
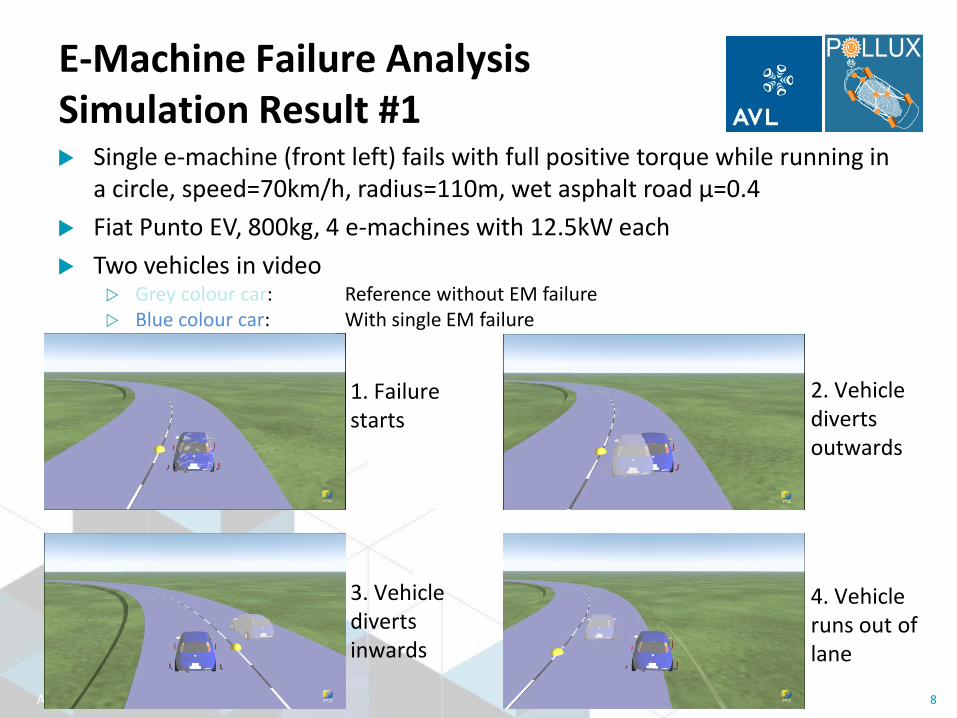
E-Machine Failure Analysis Simulation Result #1 Single e-machine (front left) fails with full positive torque while running in
a circle, speed=70km/h, radius=110m, wet asphalt road µ=0.4
Fiat Punto EV, 800kg, 4 e-machines with 12.5kW each
Two vehicles in video Grey colour car: Reference without EM failure Blue colour car: With single EM failure
8
1. Failure starts
2. Vehicle diverts outwards
3. Vehicle diverts inwards
4. Vehicle runs out of lane
ARTEMIS Pollux Project
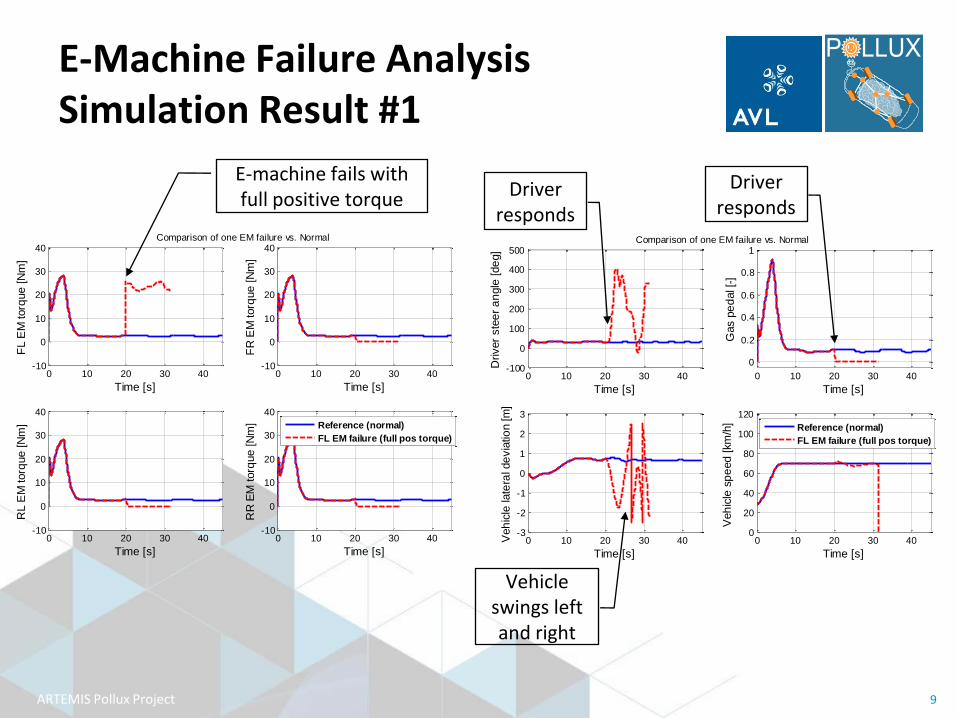
E-Machine Failure Analysis Simulation Result #1
9
0 10 20 30 40-100
0
100
200
300
400
500
Time [s]
Driver
ste
er
an
gle
[de
g]
0 10 20 30 40
0
0.2
0.4
0.6
0.8
1
Time [s]
Gas p
ed
al [-
]
0 10 20 30 40-3
-2
-1
0
1
2
3
Time [s]
Veh
icle
late
ral de
via
tio
n [m
]
0 10 20 30 400
20
40
60
80
100
120
Time [s]
Veh
icle
sp
eed
[km
/h]
Reference (normal)
FL EM failure (full pos torque)
Comparison of one EM failure vs. Normal
0 10 20 30 40-10
0
10
20
30
40
Time [s]
FL E
M torq
ue
[N
m]
0 10 20 30 40-10
0
10
20
30
40
Time [s]
FR
EM
torq
ue
[N
m]
0 10 20 30 40-10
0
10
20
30
40
Time [s]
RL E
M torq
ue
[N
m]
0 10 20 30 40-10
0
10
20
30
40
Time [s]
RR
EM
torq
ue
[N
m]
Reference (normal)
FL EM failure (full pos torque)
Comparison of one EM failure vs. Normal
E-machine fails with full positive torque Driver
responds
Driver responds
Vehicle swings left and right
ARTEMIS Pollux Project
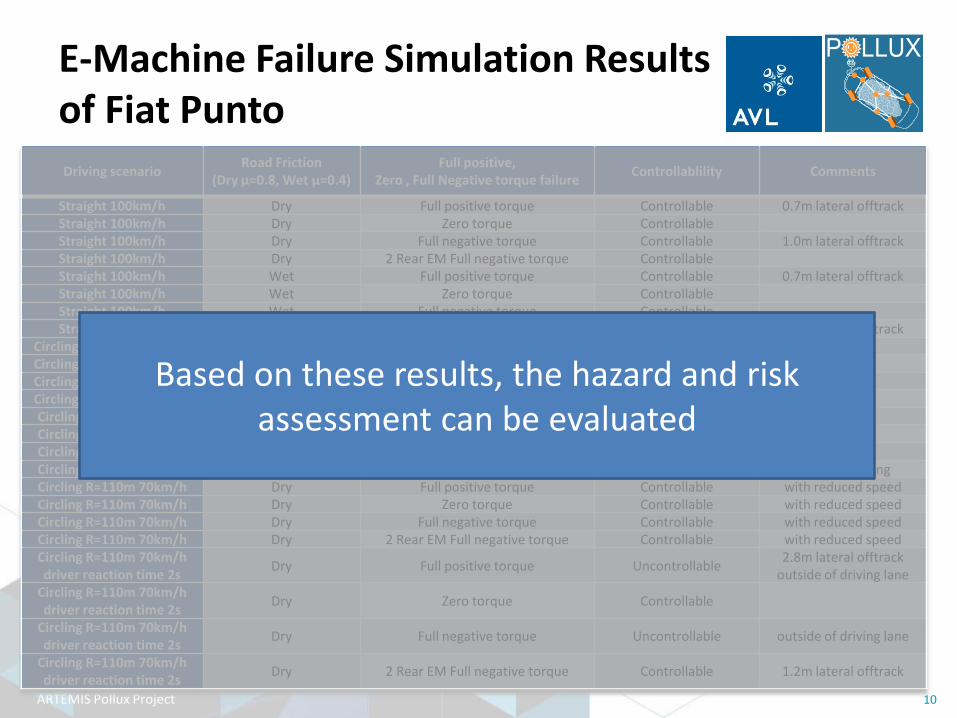
E-Machine Failure Simulation Results of Fiat Punto
10
Driving scenario Road Friction
(Dry µ=0.8, Wet µ=0.4) Full positive,
Zero , Full Negative torque failure Controllablility Comments
Straight 100km/h Dry Full positive torque Controllable 0.7m lateral offtrack
Straight 100km/h Dry Zero torque Controllable Straight 100km/h Dry Full negative torque Controllable 1.0m lateral offtrack
Straight 100km/h Dry 2 Rear EM Full negative torque Controllable Straight 100km/h Wet Full positive torque Controllable 0.7m lateral offtrack
Straight 100km/h Wet Zero torque Controllable Straight 100km/h Wet Full negative torque Controllable Straight 100km/h Wet 2 Rear EM Full negative torque Controllable 1.0m lateral offtrack
Circling R=110m 100km/h Dry Full positive torque Uncontrollable Circling R=110m 100km/h Dry Zero torque Controllable Circling R=110m 100km/h Dry Full negative torque Uncontrollable Circling R=110m 100km/h Dry 2 Rear EM Full negative torque Uncontrollable Circling R=110m 70km/h Wet Full positive torque Uncontrollable Circling R=110m 70km/h Wet Zero torque Controllable Circling R=110m 70km/h Wet Full negative torque Uncontrollable Circling R=110m 70km/h Wet 2 Rear EM Full negative torque Uncontrollable vehicle spinning
Circling R=110m 70km/h Dry Full positive torque Controllable with reduced speed
Circling R=110m 70km/h Dry Zero torque Controllable with reduced speed
Circling R=110m 70km/h Dry Full negative torque Controllable with reduced speed
Circling R=110m 70km/h Dry 2 Rear EM Full negative torque Controllable with reduced speed
Circling R=110m 70km/h driver reaction time 2s
Dry Full positive torque Uncontrollable 2.8m lateral offtrack
outside of driving lane
Circling R=110m 70km/h driver reaction time 2s
Dry Zero torque Controllable
Circling R=110m 70km/h driver reaction time 2s
Dry Full negative torque Uncontrollable outside of driving lane
Circling R=110m 70km/h driver reaction time 2s
Dry 2 Rear EM Full negative torque Controllable 1.2m lateral offtrack
Based on these results, the hazard and risk assessment can be evaluated
ARTEMIS Pollux Project
Simulated EV Dynamics Content
Introduction
Co-Simulation Toolchain of CRUISE & CarMaker
E-Machine Failure Analysis in Simulation
E-Torque Vectoring Control (eTVC)
Effect of eTVC on E-Machine Failure
Summary & Next Steps
11

ARTEMIS Pollux Project
eTVC Targets
12
Agility Improve relation between steering and vehicle reaction
Performance Increase max lateral acceleration
Safety Increase vehicle stability and controllability
Stability / Safety
ARTEMIS Pollux Project
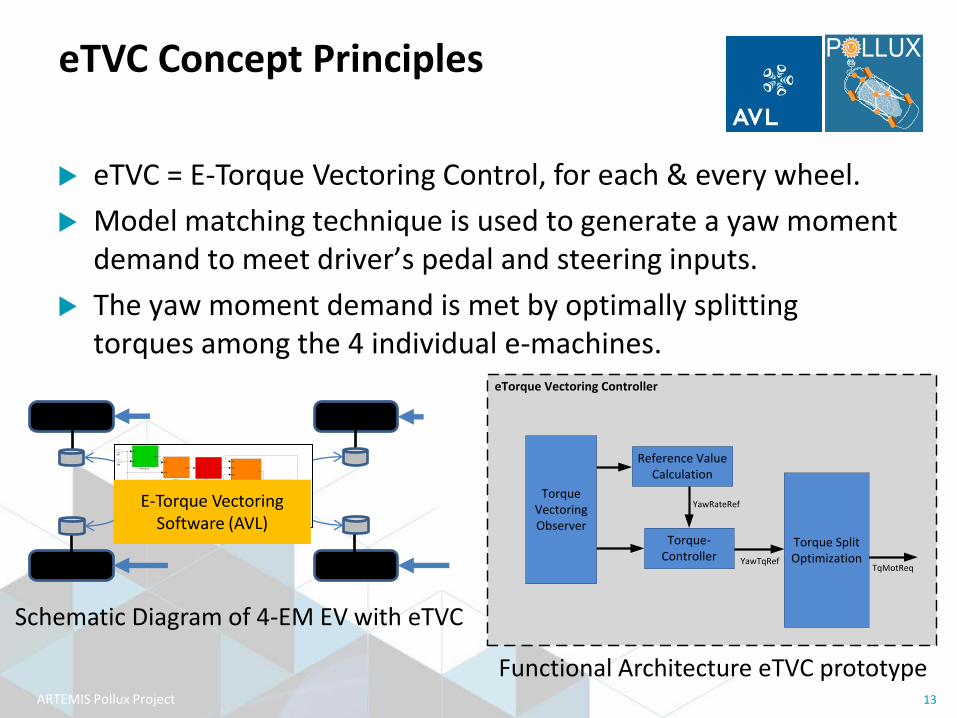
eTVC Concept Principles
eTVC = E-Torque Vectoring Control, for each & every wheel.
Model matching technique is used to generate a yaw moment demand to meet driver’s pedal and steering inputs.
The yaw moment demand is met by optimally splitting torques among the 4 individual e-machines.
13
TC
1
TqTra
TM
TCP
INIF
HMI
TT
TqSplit
TCP TT
TqMon
TT
INIF
HMI
SYS
TMO
TqLim
PTC
INIF
TCPPwrTqCnvr
INIF
EM
PTC
SYS
4
EM
3
INIF
2
HMI
1E-Torque Vectoring
Software (AVL)
eTorque Vectoring Controller
TqMotReq
YawRateRef
YawTqRef
Reference Value Calculation
Torque Vectoring Observer
Torque-Controller
Torque Split Optimization
Functional Architecture eTVC prototype
Schematic Diagram of 4-EM EV with eTVC

ARTEMIS Pollux Project
eTVC Simulation Environment
14
CarMaker for Simulink (v3.5.2)Vehicle Dynamics(Main Simulation Environment)
AVL CRUISE (v2010.1)Powertrain
Matlab/Simulink (R2007b)SW ofE-Torque Vectoring
Software development support
Algorithm verification
Model calibration
Function demo
ARTEMIS Pollux Project
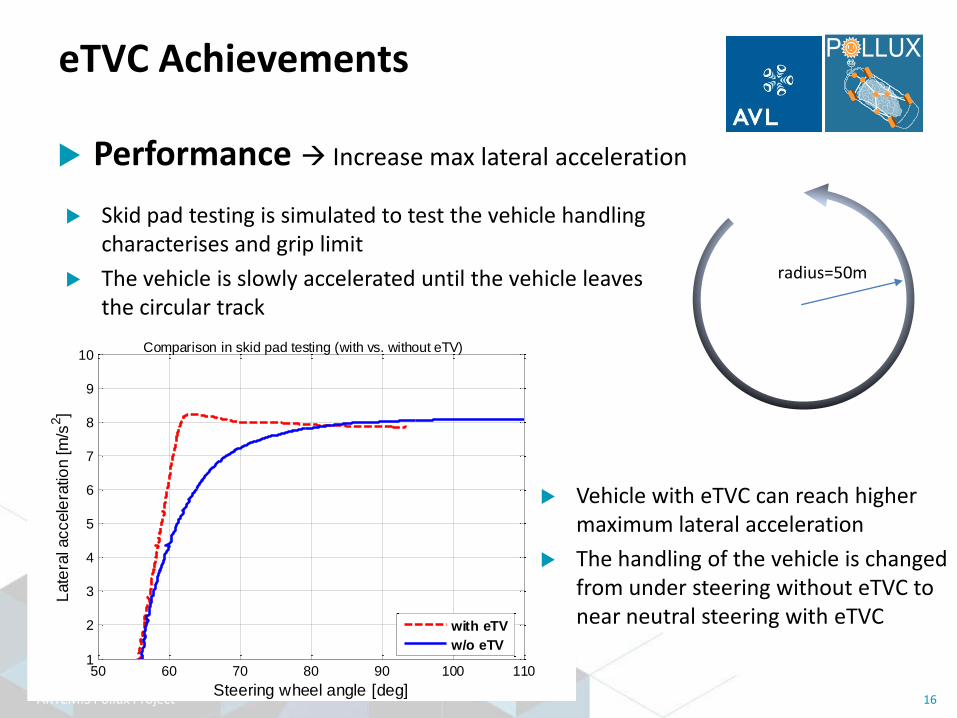
eTVC Achievements
16
Performance Increase max lateral acceleration
Skid pad testing is simulated to test the vehicle handling characterises and grip limit
The vehicle is slowly accelerated until the vehicle leaves the circular track
50 60 70 80 90 100 1101
2
3
4
5
6
7
8
9
10
Steering wheel angle [deg]
Late
ral accele
ratio
n [m
/s2]
with eTV
w/o eTV
Comparison in skid pad testing (with vs. without eTV)
Vehicle with eTVC can reach higher maximum lateral acceleration
The handling of the vehicle is changed from under steering without eTVC to near neutral steering with eTVC
radius=50m

ARTEMIS Pollux Project
eTVC Achievements
17
Safety Increase vehicle stability
Increased speed in slalom maneuver
Max vehicle speed to drive through is found out with several trials

ARTEMIS Pollux Project
eTVC Achievements
18
Safety Increase vehicle stability and controllability
With eTVC, the driver can drive the vehicle through the slalom manoeuvre at speed 49km/h, whilst the vehicle can’t without eTVC at 49km/h
with eTVC (blue), w/o eTVC (grey) same speed
ARTEMIS Pollux Project
Simulated EV Dynamics Content
Introduction
Co-Simulation Toolchain of CRUISE & CarMaker
E-Machine Failure Analysis in Simulation
E-Torque Vectoring Control (eTVC)
Effect of eTVC on E-Machine Failure
Summary & Next Steps
19

ARTEMIS Pollux Project
Effect of eTVC on E-Machine Failure
E-torque vectoring controller demands torques of remaining functional e-machines to counteract the effect of e-machine failure.
Significant potential benefits of e-torque vectoring on vehicle stability when one e-machine fails due to the e-machine itself or machine power electronics controller.
20
ARTEMIS Pollux Project
EM-failed vehicle With vs. W/O eTVC
Single e-machine (front left) fails with full negative torque while running in a circle, speed=100km/h, radius=110m, dry asphalt road µ=0.8
Fiat Punto EV, 800kg, 4 e-machines with 12.5kW each
Two vehicles in video Grey colour car: Reference without eTVC, with single EM failure Blue colour car: With eTVC, with single EM failure
21

ARTEMIS Pollux Project
Simulated EV Dynamics Content
Introduction
Co-Simulation Toolchain of CRUISE & CarMaker
E-Machine Failure Analysis in Simulation
E-Torque Vectoring Control (eTVC)
Effect of eTVC on E-Machine Failure
Summary & Next Steps
22
ARTEMIS Pollux Project
Summary & Next Steps
A co-simulation toolchain is built with AVL Cruise, InMotion, IPG CarMaker, and Matlab Simulink for EV with 4 e-machines.
Safety simulation for ISO26262 and virtual hazard severity rating in early concept phase is demonstrated with the co-simulation toolchain.
E-Torque Vectoring Controller is developed and validated in the simulation.
Potential improvement of lateral vehicle dynamics and safety with eTVC is demonstrated, not only on normal functioning EV, but also on vehicle with e-machine failure.
Next Steps - migration to Real Time.
23