Simple Doppler Wind Lidar adaptive observation experiments ......Simple Doppler Wind Lidar adaptive...
5
Simple Doppler Wind Lidar adaptive observation experiments with 3D-Var and an ensemble Kalman filter in a global primitive equations model Junjie Liu 1 and Eugenia Kalnay 1 Received 16 May 2007; revised 2 August 2007; accepted 12 September 2007; published 11 October 2007. [ 1] Through simple Observing System Simulation Experiments, we compare several adaptive observation strategies designed to subsample Doppler Wind Lidar (DWL) observations along satellite tracks, and examine the effectiveness of two data assimilation schemes, 3D-Var and the Local Ensemble Transform Kalman Filter (LETKF). With respect to sampling strategies, our results show that the LETKF-based ensemble spread method is superior to the other strategies tested, namely, use of a uniform distribution, the climatological spread strategy, or use of a random distribution, and is close to the ideal result obtained assuming that the true forecast error is known. With 10% DWL observations from the ensemble spread strategy, both 3D-Var and LETKF attain about 90% of the impact that 100% DWL wind profile coverage would provide. However, when the adaptive DWL observations coverage is reduced to 2%, 3D-Var becomes less effective than the LETKF assimilation scheme. Citation: Liu, J., and E. Kalnay (2007), Simple Doppler Wind Lidar adaptive observation experiments with 3D-Var and an ensemble Kalman filter in a global primitive equations model, Geophys. Res. Lett., 34, L19808, doi:10.1029/2007GL030707. 1. Introduction [2] Within the next few years, the first Doppler Wind Lidar (DWL) will be deployed in space by the European Space Agency (ESA, see, http://www.congrex.nl/06c05/). In addition, in its recent Decadal Survey Report, the National Research Council recommended a US global winds mission in the coming decade. Because the operation of DWL is strongly constrained by energy resources [Rishojgaard and Atlas, 2004], a frequently stated qualitative goal is to get about 90% of the total effectiveness from just 10% coverage with adaptive observations. Here, 10% coverage means making measurements in only 10% of the total footprints that the DWL can possibly scan in a certain interval such as six hours. Unlike the applications of adaptive dropsonde observing in field experiments (FASTEX, NORPEX) [Joly et al., 1997; Bergot, 1999; Langland et al., 1999a; Langland et al., 1999b; Pu and Kalnay , 1999; Szunyogh et al., 1999; Majumdar et al., 2002; Toth et al., 2002; Langland, 2005], which attempt to optimize the 2–3 days forecast within a specified verification region (e.g., Europe or North America), the goal in our study is to optimize the six-hour global analysis by optimally distributing the limited DWL observa- tion resources. As pointed out by Lorenz and Emanuel [1998], if a single adaptive observation is made at the location with largest background uncertainty, the global analysis error will be most reduced. The question we address is how to represent the background dynamical uncertainty and choose adaptive observation locations accordingly. [3] One efficient formulation of Ensemble Kalman Filter (EnKF), a relatively new data assimilation approach that provides an estimate of the background dynamical uncer- tainty, is the Local Ensemble Transform Kalman Filter (LETKF) [see Hunt et al., 2007, and references therein]. The diagonal value of an EnKF-computed background error covariance matrix for a given variable is the ensemble spread for that variable. Locations with large ensemble spread are those in which dynamical instabilities of the evolving flow result in large background (forecast) errors and therefore where observations can be most useful. The different observation location selection strategies that we compare are (1) one based on the 20-member LETKF ensemble spread, (2) a uniform observation distribution, (3) one based on the climatological background uncertainty, (4) random locations, and (5) an ‘‘ideal’’ strategy based on assumed knowledge of the true forecast error. We compare the impacts of adaptive observations selected with these different methods by assimilating them with two different data assimilation schemes, 3D-Var and LETKF. We test both 10% and 2% adaptive observations coverage, allowing for relatively dense and sparse adaptive observation scenar- ios. Comparison of these two scenarios will show the sensitivity of data assimilation schemes to the amount of adaptive observations. 2. Model, Observations, and Data Assimilation Schemes [4] In this study, we use the Simplified Parameterizations, primitivE Equation DYnamics (SPEEDY) model, devel- oped by Molteni [2003] and adapted for data assimilation by Miyoshi [2005]. It has a simplified but complete set of physical processes, seven vertical levels, 96 longitudinal grid points, and 48 latitudinal grid points. We follow a ‘‘perfect model’’ Observing System Simulation Experi- ments (OSSEs) setup, in which the simulated ‘‘truth’’ (long model integration) is generated with the same atmospheric model as the one used in data assimilation. In such an experimental setup, we avoid the complications of model error, and the only source of forecast errors comes from the initial conditions, but because of the ‘‘identical twin’’ relationship between nature and model, the results may be GEOPHYSICAL RESEARCH LETTERS, VOL. 34, L19808, doi:10.1029/2007GL030707, 2007 Click Here for Full Articl e 1 Department of Atmospheric and Oceanic Science, University of Maryland, College Park, Maryland, USA. Copyright 2007 by the American Geophysical Union. 0094-8276/07/2007GL030707$05.00 L19808 1 of 5
Transcript of Simple Doppler Wind Lidar adaptive observation experiments ......Simple Doppler Wind Lidar adaptive...

Simple Doppler Wind Lidar adaptive observation experiments with
3D-Var and an ensemble Kalman filter in a global primitive equations
model
Junjie Liu1 and Eugenia Kalnay1
Received 16 May 2007; revised 2 August 2007; accepted 12 September 2007; published 11 October 2007.
[1] Through simple Observing System SimulationExperiments, we compare several adaptive observationstrategies designed to subsample Doppler Wind Lidar(DWL) observations along satellite tracks, and examinethe effectiveness of two data assimilation schemes, 3D-Varand the Local Ensemble Transform Kalman Filter (LETKF).With respect to sampling strategies, our results show thatthe LETKF-based ensemble spread method is superior tothe other strategies tested, namely, use of a uniformdistribution, the climatological spread strategy, or use of arandom distribution, and is close to the ideal result obtainedassuming that the true forecast error is known. With 10%DWL observations from the ensemble spread strategy, both3D-Var and LETKF attain about 90% of the impact that100% DWL wind profile coverage would provide.However, when the adaptive DWL observations coverageis reduced to 2%, 3D-Var becomes less effective than theLETKF assimilation scheme. Citation: Liu, J., and E. Kalnay
(2007), Simple Doppler Wind Lidar adaptive observation
experiments with 3D-Var and an ensemble Kalman filter in a
global primitive equations model, Geophys. Res. Lett., 34,
L19808, doi:10.1029/2007GL030707.
1. Introduction
[2] Within the next few years, the first Doppler WindLidar (DWL) will be deployed in space by the EuropeanSpace Agency (ESA, see, http://www.congrex.nl/06c05/). Inaddition, in its recent Decadal Survey Report, the NationalResearch Council recommended a US global winds missionin the coming decade. Because the operation of DWL isstrongly constrained by energy resources [Rishojgaard andAtlas, 2004], a frequently stated qualitative goal is to getabout 90% of the total effectiveness from just 10% coveragewith adaptive observations. Here, 10% coverage meansmaking measurements in only 10% of the total footprintsthat the DWL can possibly scan in a certain interval such assix hours. Unlike the applications of adaptive dropsondeobserving in field experiments (FASTEX, NORPEX) [Jolyet al., 1997; Bergot, 1999; Langland et al., 1999a; Langlandet al., 1999b; Pu and Kalnay, 1999; Szunyogh et al., 1999;Majumdar et al., 2002; Toth et al., 2002; Langland, 2005],which attempt to optimize the 2–3 days forecast within aspecified verification region (e.g., Europe or North America),
the goal in our study is to optimize the six-hour globalanalysis by optimally distributing the limited DWL observa-tion resources. As pointed out by Lorenz and Emanuel[1998], if a single adaptive observation is made at the locationwith largest background uncertainty, the global analysiserror will be most reduced. The question we address is howto represent the background dynamical uncertainty andchoose adaptive observation locations accordingly.[3] One efficient formulation of Ensemble Kalman Filter
(EnKF), a relatively new data assimilation approach thatprovides an estimate of the background dynamical uncer-tainty, is the Local Ensemble Transform Kalman Filter(LETKF) [see Hunt et al., 2007, and references therein].The diagonal value of an EnKF-computed background errorcovariance matrix for a given variable is the ensemblespread for that variable. Locations with large ensemblespread are those in which dynamical instabilities of theevolving flow result in large background (forecast) errorsand therefore where observations can be most useful. Thedifferent observation location selection strategies that wecompare are (1) one based on the 20-member LETKFensemble spread, (2) a uniform observation distribution,(3) one based on the climatological background uncertainty,(4) random locations, and (5) an ‘‘ideal’’ strategy based onassumed knowledge of the true forecast error. We comparethe impacts of adaptive observations selected with thesedifferent methods by assimilating them with two differentdata assimilation schemes, 3D-Var and LETKF. We testboth 10% and 2% adaptive observations coverage, allowingfor relatively dense and sparse adaptive observation scenar-ios. Comparison of these two scenarios will show thesensitivity of data assimilation schemes to the amount ofadaptive observations.
2. Model, Observations, and Data AssimilationSchemes
[4] In this study, we use the Simplified Parameterizations,primitivE Equation DYnamics (SPEEDY) model, devel-oped by Molteni [2003] and adapted for data assimilationby Miyoshi [2005]. It has a simplified but complete set ofphysical processes, seven vertical levels, 96 longitudinalgrid points, and 48 latitudinal grid points. We follow a‘‘perfect model’’ Observing System Simulation Experi-ments (OSSEs) setup, in which the simulated ‘‘truth’’ (longmodel integration) is generated with the same atmosphericmodel as the one used in data assimilation. In such anexperimental setup, we avoid the complications of modelerror, and the only source of forecast errors comes from theinitial conditions, but because of the ‘‘identical twin’’relationship between nature and model, the results may be
GEOPHYSICAL RESEARCH LETTERS, VOL. 34, L19808, doi:10.1029/2007GL030707, 2007ClickHere
for
FullArticle
1Department of Atmospheric and Oceanic Science, University ofMaryland, College Park, Maryland, USA.
Copyright 2007 by the American Geophysical Union.0094-8276/07/2007GL030707$05.00
L19808 1 of 5

overoptimistic. Observations are obtained from the ‘‘truth’’with added Gaussian random perturbations. The observa-tional error standard deviations assumed for wind compo-nents (u, v), temperature (T), specific humidity (q) andsurface pressure (ps) are 1.0 m/s, 1.0 K, 0.1 g/kg, and1.0 hPa, respectively. These error levels do not depend onthe spatial locations.[5] To test the sensitivity of the impacts of adaptive
observations to data assimilation methods, we use both3D-Var [Parrish and Derber, 1992; Miyoshi, 2005] andLETKF [Ott et al., 2004; Hunt et al., 2007]. 3D-Var uses aconstant background error covariance, which is calculatedas by Parrish and Derber [1992]. LETKF, as other EnKFschemes, employs the time evolving error covariance esti-mated from the forecast ensemble so that it automaticallygives an estimation of the forecast uncertainty. The appli-cation of LETKF on the SPEEDY model follows Hunt et al.[2007].
3. Adaptive Strategies and the Distribution ofSimulated Adaptive DWL Observations
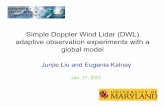
[6] We mimic polar orbiting satellite tracks and DWLobservations assuming that the satellite scans half hemi-sphere ‘‘orbits’’ in each six-hour analysis cycle. The basicobservations (u, v, T, q, ps) assimilated in all our experi-ments are simulated rawinsondes, shown as closed circles inFigure 1 (six-hour ‘‘orbits’’ are shown separated by verticaldashed lines). Figure 1 also shows an example of thedistribution of 10% adaptive observations (crosses) fromthe ensemble spread strategy (defined below) at 1200 UTC.At 0000 UTC, the satellite scans the same half hemisphereorbit as at 1200 UTC, and the other half hemisphere orbit isscanned at 0600 UTC and 1800 UTC. Thus, we assume thateach grid point can be observed twice a day (this is toooptimistic because we neglect the impact of clouds). Sincethe characteristics of the forecast uncertainties are differentin different regions [Kalnay, 2003], the adaptive DWL
observations are distributed into seven subregions, theequatorial region, northern and southern tropics, and north-ern and southern mid- and high-latitudes (separated byhorizontal dashed lines in Figure 1). Each subregion isallotted a number of adaptive observations proportional toits area. At the selected adaptive DWL locations, both zonalwind and meridional wind are observed at all vertical levels,which is also over-optimistic because the lidar wind com-ponent that is actually observed is its projection on the line-of-sight direction [Stoffelen et al., 2005], and we do notaccount for clouds.[7] In all of the five adaptive observation strategies we
tested, we impose a horizontal separation constraint tominimize possible observation redundancy, namely thatthe adaptive observations have to be at least two grid pointsapart in both longitude and latitude directions. Hamill andSnyder [2002] account for observation redundancy byselecting the observations serially in minimizing the analy-sis error variance. However, directly minimizing the anal-ysis error variance is much more expensive than computingensemble spread and applying the separation constraint,especially when selecting adaptive observations from a verylarge pool of observation locations. In the ensemble spreadmethod, the separation constraint is carried out by firstordering the average 6-hour forecast ensemble spread ofwind at 500 hPa from largest to smallest in each region.Within each region, the location with largest ensemblespread is selected as the first adaptive observation location.Then, we delete the locations adjacent to (neighboringhorizontal grid points) the first adaptive observation loca-tion in both zonal and meridional direction from thepotential adaptive observation queue. The second adaptiveobservation location is where ensemble spread in theremaining queue is largest. This process is repeated untilall the adaptive observation locations are selected. If all theobservations are either selected or deleted before the allottednumber of adaptive observations are picked out, the remain-ing adaptive observations are the locations with largest
Figure 1. Example of the distribution of adaptive observations (crosses) from the ensemble spread sampling strategy at1200 UTC February 03. The closed circles represent rawinsonde observation locations. Shades represent the averageensemble spread (m/s) of zonal and meridional wind at 500 hPa at that time. Horizontal dashed lines divide the whole globeinto seven latitude bands. Vertical dashed lines separate the globe into four sub-regions representing two ‘‘orbits.’’
L19808 LIU AND KALNAY: DWL ADAPTIVE OBSERVATION EXPERIMENTS L19808
2 of 5

ensemble spread that were deleted from the queue. A similarseparation constraint is applied in all of the other strategies.In the climatological spread method, the climatologicalbackground ensemble spread is obtained from a longLETKF analysis assimilating rawinsonde observations only,and the adaptive observations are at the locations withlargest climatological ensemble spread. In the ideal strategy,the adaptive observations are located where the backgrounderror (i.e., the absolute difference between 6-hour forecastsof 500 hPa wind and the true 500 hPa wind field) is largest.Since this strategy requires knowing the ‘‘truth’’, it cannotbe implemented in practice. The adaptive observationlocations from ensemble spread, random location and theideal strategy change with time, whereas the locations arefixed for the uniform distribution and climatological en-semble spread strategies. In order to test whether theforecast ensemble spread truly represents forecast uncer-tainty, we use the same adaptive observation locations forboth 3D-Var and LETKF in the ensemble spread andclimatological ensemble spread strategies, even though theyare both derived from LETKF assimilations.[8] We examine the effectiveness of these five adaptive
observation strategies by computing the analysis Root MeanSquare (RMS) errors and comparing them to extremes ofboth 0% DWL coverage (i.e., rawinsondes only), and full(100%) DWL coverage. The percentage improvement for
each strategy is defined as PI =RMS � RMS0%
RMS100% � RMS0%�
100%, where RMS is the time mean global average RMSerrors of the adaptive strategy, RMS100% and RMS0% are thetime mean global average RMS errors of full DWL cover-age and no DWL coverage, respectively. The time mean iscalculated over the second month analysis cycle of the two-month analysis period.
4. Results
[9] Figure 2 shows the time evolution of the globalaveraged zonal wind analysis RMS errors for 3D-Var
(Figure 2, left) and LETKF (Figure 2, right) with 0%coverage (dashed line) and 100% coverage (solid line), aswell as the five adaptive strategies using 10% coverage. Thetime averaged RMS error for the second month is presentedin Table 1. Not surprisingly, the ideal strategy (dot dashedline) has the smallest errors, and is close to the error levelobtained with 100% coverage. The LETKF-based ensemblespread strategy (solid line with open squares) is the best ofthe adaptive strategies that are feasible in practice, and isvery close to the ideal strategy even for the 3D-Var analysis.The random location (solid line with crosses) is better thanthe uniform distribution strategy (solid line with closedcircles). The worst results are obtained from the climato-logical ensemble spread distribution (solid line with opentriangles) because there are no adaptive observations overvast areas (not shown). The adaptive strategies with time-changing locations (ensemble spread, random location,ideal strategy) are all better than the constant observationdistributions (uniform distribution, climatological ensemblespread), a conclusion consistent with previous results[Lorenz and Emanuel, 1998; Hamill and Snyder, 2002].Through the covariance between winds and the othervariables in background error covariance, the wind obser-vations improve the analysis of the other variables such astemperature, for which the different adaptive observationstrategies have the same ranking as for the wind analysis(not shown).[10] A striking result is that the RMS errors of LETKF
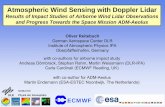
(Figure 2, right, and Table 1) shows a much smallerdifference among the adaptive strategies than that of 3D-Var, although their relative ranking is the same. This isbecause 3D-Var, with a constant background error covari-ance, is much more sensitive to the choice of observationlocation. With less optimal adaptive strategies, such asuniform distribution, the large background errors are noteffectively reduced due to lack of observations around somelocations with large background error (Figure 3, left). Onthe other hand, with the ensemble spread strategy, theadaptive observations are near the locations with large
Figure 2. 2-month evolution of 500 hPa globally averaged zonal wind analysis RMS errors for (left) 3D-Var and (right)LETKF from 10% adaptive observations assimilation. From top to bottom: dashed line, rawinsonde observation (0% DWL)assimilation; solid line with open triangles, climatological spread; solid line with closed circles, uniform distribution; solidline with crosses, random locations; solid line with open squares, ensemble spread adaptive strategy; dot dashed line, idealsampling; solid line, 100% adaptive observation coverage over half hemisphere.
L19808 LIU AND KALNAY: DWL ADAPTIVE OBSERVATION EXPERIMENTS L19808
3 of 5

background errors (Figure 3, right). Therefore, the assimi-lation of these adaptive observations is equivalent to pro-viding the information of the time-changing largebackground errors to 3D-Var. As a result, the analysisincrements in 3D-Var have a shape more similar (but withopposite sign) to the background error (Figure 3, right) thanin any other feasible method. By contrast, LETKF, whosebackground error covariance already includes informationon the ‘‘errors of the day’’, is more efficient in extractinginformation from the observations even if their locations arenot optimal, so that all the strategies give similarly smallanalysis errors.[11] It is clear from Figure 2 (left) and Table 1 that in this
idealized experiment, 3D-Var attains more than 90% of theimprovements between 0% and 100% coverage from just10% adaptive observations determined with the ensemblespread strategy. The percentage improvement of ensemblespread strategy in LETKF is somewhat smaller than for 3D-Var, and, as discussed above, all adaptive strategies aresimilarly successful (Table 1). This seems to contradict theconclusions based on the previous adaptive observationfield experiments that adaptive observations would be moreeffective with more advanced data assimilation schemes,such as 4D-Var or EnKF [Langland, 2005]. However, weused relatively dense adaptive observation coverage in ourexperiments with 10% observed every six hours over halfthe globe. To make our results more compatible withprevious field experiments, we now use the same adaptiveobservation strategies but substantially reduce the numberof observation locations to only 2% of the full coverage
(Table 2). With this small number of adaptive observations,the analysis errors of the adaptive strategies in 3D-Var aremuch larger, and even the most effective strategies, randomlocation and ensemble spread, are only able to reduce theerrors by less than 30%. By contrast, the LETKF stillobtains 77% improvements from just 2% adaptive observa-tions. The difference in performance among the five adap-tive observation strategies is much more evident, but withthe same ranking as before. This result shows that withfewer adaptive observations, the data assimilation schemeplays a more important role in determining the effectivenessof adaptive observations. More advanced data assimilationschemes, such as the LETKF, use more efficiently of smallamounts of observation information, which is consistentwith previous field experiments [Langland, 2005]. Thesmall number of observations is not enough to provideenough global information on the ‘‘errors of the day’’needed for the improvement of 3D-Var, while in theLETKF, it is possible to estimate the evolving error struc-tures even with few observations.
5. Conclusions and Discussion
[12] In this study we showed the potential of a simpleensemble spread strategy for adaptive observations in thecontext of minimizing the energy required by DWL laserfirings. The same adaptive strategy could be used for anysatellite instrument designed to ‘‘dwell’’ in regions of highuncertainty rather than providing uniform coverage alongthe orbit as conventionally done.
Table 1. 500 hPa Zonal Wind Time Average Over February of Global Mean RMS Errors and Percentage Improvement Obtained With
10% Adaptive Observations for Both 3D-Var and LETKF
Data Assimilation Experiment Rawinsonde, 0% Climatology, 10% Uniform, 10% Random, 10% Spread, 10% Ideal, 10% 100%
3D-Var RMS error (m/s) 4.04 2.36 0.92 0.74 0.43 0.36 0.30PI N/A 45% 83% 88% 97% 98% N/A
LETKF RMS error (m/s) 1.18 0.38 0.36 0.33 0.32 0.29 0.23PI N/A 84% 84% 89% 91% 94% N/A
Figure 3. 3D-Var zonal wind analysis increments (contour and color bar interval 0.3 m/s, same as the color bar, solid linesfor positive value, dashed lines for negative value), background error (shaded) and adaptive observation distribution(crosses) from (left) uniform distribution and (right) ensemble spread sampling strategy at 1200 UTC February 03. Theclosed circles are rawinsonde observation locations.
L19808 LIU AND KALNAY: DWL ADAPTIVE OBSERVATION EXPERIMENTS L19808
4 of 5

[13] We compared ensemble spread with several otheradaptive observation strategies (uniform distribution, ran-dom distribution, climatological ensemble spread) andfound that the six-hour LETKF forecast ensemble spreadgives a useful estimate of background uncertainty anddynamical instabilities. With 10% adaptive DWL observa-tions, the ensemble spread sampling strategy gives the bestresult in both 3D-Var and LETKF, attaining more than 90%effectiveness of the full observation coverage. 3D-Var ismore sensitive to adaptive strategies than the LETKF. Sincethe latter includes information on the ‘‘errors of the day’’,different adaptive strategies have closer performances.[14] We found that the sensitivity of adaptive observation
effectiveness to data assimilation schemes is related to theamount of adaptive observations to be determined. With arelatively dense number of adaptive wind observations,such as 10% of the maximum coverage, the relative impactof these observations is similar for 3D-Var and LETKF.With only 2% coverage, the effectiveness of the adaptiveobservations strongly depends on the data assimilationscheme. 3D-Var is less effective than LETKF even whenusing the LETKF ensemble spread locations.[15] Although our results are indicative of the potential
for adaptive observations in remote sensing, we madeseveral simplifying assumptions, using a perfect modelscenario, a low resolution global model, an extreme simpli-fication of satellite orbits and DWL observations, assuminguncorrelated Gaussian observational errors, and neglectingthe effect of clouds. As a result, the actual percentageimprovements from assimilating DWL adaptive observa-tions may be overoptimistic. Experiments with state-of-the-art OSSE systems should be carried out to verify whetherour results are valid in a more realistic setup. We believethat the main results, which states that the EnKF-baseduncertainty estimation gives valuable guidance to allocatelimited observation resources along the satellite track, andthat the effectiveness of data assimilation schemes is sensi-tive to the amount of adaptive observations, would be valideven in a realistic experimental setup.
[16] Acknowledgments. We are very grateful to Wayman Baker,David Emmitt and Bob Atlas for their encouragement and suggestionsand to our colleagues from the Weather and Chaos group at the Universityof Maryland, especially Ed Ott, Istvan Szunyogh, and Brian Hunt, for manydiscussions. This work was supported by a NOAA/NASA/NPOESS grantthrough SWA04N0024403C.
ReferencesBergot, T. (1999), Adaptive observations during FASTEX: A systematicsurvey of upstream flights, Q. J. R. Meteorol. Soc., 125, 3271–3298.
Hamill, M. T., and C. Snyder (2002), Using improved background-errorcovariances from an ensemble Kalman filter for adaptive observations,Mon. Weather Rev., 130, 1552–1572.
Hunt, B. R., E. J. Kostelich, and I. Szunyogh (2007), Efficient data assim-ilation for spatiotemporal chaos: A local ensemble transform Kalmanfilter, Physica D, 230, 112–126.
Joly, A., et al. (1997), Definition of the Frants and Atlantic Storm-TrackExperiment (FASTEX), Bull. Am. Meteorol. Soc., 78, 1917–1940.
Kalnay, E. (2003), Atmospheric Modeling, Data Assimilation and Predict-ability, 341 pp., Cambridge Univ. Press, New York.
Langland, R. H. (2005), Issues in targeted observing, Q. J. R. Meteorol.Soc., 131, 3409–3425.
Langland, R. H., R. Gelaro, G. D. Rohaly, and M. A. Shapiro (1999a),Targeted observations in FASTEX: Adjoint-based targeting proceduresand data impact experiments in IOP17 and IOP18, Q. J. R. Meteorol.Soc., 125, 3241–3270.
Langland, R. H., et al. (1999b), The North Pacific Experiment (NORPEX-98): Targeted observations for improved North American weather fore-casts, Bull. Am. Meteorol. Soc., 80, 1363–1384.
Lorenz, E. N., and K. A. Emanuel (1998), Optimal sites for supplementaryobservations: Simulation with a small model, J. Atmos. Sci., 55, 399–414.
Majumdar, S. J., C. H. Bishop, and B. J. Etherton (2002), Adaptive sam-pling with the ensemble transform Kalman filter. Part II: Field programimplementation, Mon. Weather Rev., 130, 1356–1369.
Miyoshi, T. (2005), Ensemble Kalman filter experiments with a primitive-equation global model, Ph.D. thesis, Univ. of Maryland, College Park.
Molteni, F. (2003), Atmospheric simulations using a GCM with simplifiedphysical parameterizations. I: Model climatology and variability in multi-decadal experiments, Climate Dyn., 20, 175–191.
Ott, E., B. R. Hunt, I. Szunyogh, A. V. Zimin, E. J. Kostelich, M. Corazza,E. Kalnay, D. J. Patil, and J. A. Yorke (2004), A local ensemble Kalmanfilter for atmospheric data assimilation, Tellus Ser. A, 56, 415–428.
Parrish, D. F., and J. C. Derber (1992), The National Meteorological Cen-ter’s spectral statistical-interpolation analysis system, Mon. Weather Rev.,120, 1747–1763.
Pu, Z., and E. Kalnay (1999), Targeting observations with the quasi-inverselinear and adjoint NCEP global models: Performance during FASTEX,Q. J. R. Meteorol. Soc., 125, 3329–3338.
Rishojgaard, L. P., and R. Atlas (2004), The impact of Doppler Lidar Windobservations on a single-level meteorological analysis, J. Appl. Meteorol.,43, 810–820.
Stoffelen, A., et al. (2005), The atmospheric dynamics mission for globalwind field experiments, Bull. Am. Meteorol. Soc., 86, 73–87.
Szunyogh, I., Z. Toth, K. A. Emanuel, C. H. Bishop, C. Snyder, R. E.Morss, J. S. Woolen, and T. P. Marchok (1999), Ensemble-based target-ing during FASTEX: The impact of dropsonde data from the LEAR jet,Q. J. R. Meteorol. Soc., 125, 3189–3217.
Toth, Z., et al. (2002), Adaptive observations at NCEP: Past, present andfuture, paper presented at the Symposium on Observations, Data Assim-ilation and Probabilistic Prediction, Am. Meteorol. Soc., Orlando, Fla.,13–17 Jan.
�����������������������E. Kalnay and J. Liu, Department of Atmospheric and Oceanic Science,
University of Maryland, College Park, MD 20742, USA. ([email protected])
Table 2. 500 hPa Zonal Wind Time Average Over February of Global Mean RMS Errors and Percentage Improvement Obtained With
2% Adaptive Observations for Both 3D-Var and LETKF
Data Assimilation Experiment Rawinsonde, 0% Climatology, 2% Uniform, 2% Random, 2% Spread, 2% Ideal, 2% 100%
3D-Var RMS error (m/s) 4.04 3.26 3.53 3.00 3.11 1.68 0.30PI N/A 21% 14% 28% 25% 63% N/A
LETKF RMS error (m/s) 1.18 0.67 0.59 0.51 0.45 0.41 0.23PI N/A 54% 62% 71% 77% 81% N/A
L19808 LIU AND KALNAY: DWL ADAPTIVE OBSERVATION EXPERIMENTS L19808
5 of 5