Sensor Management In 2D Lidar Based Underground Positioning
9
Sensor Management In 2D Lidar Based Underground Positioning Kristin Nielsen and Gustaf Hendeby The self-archived postprint version of this journal article is available at Linköping University Institutional Repository (DiVA): http://urn.kb.se/resolve?urn=urn:nbn:se:liu:diva-167482 N.B.: When citing this work, cite the original publication. Nielsen, K., Hendeby, G., (2020), Sensor Management In 2D Lidar Based Underground Positioning, Proceedings 2020 IEEE 23rd International Conference on Information Fusion (FUSION), , 765-772. https://doi.org/10.23919/FUSION45008.2020.9190382 Original publication available at: https://doi.org/10.23919/FUSION45008.2020.9190382 Copyright: Institute of Electrical and Electronics Engineers (IEEE) http://www.ieee.org/ ©2020 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
Transcript of Sensor Management In 2D Lidar Based Underground Positioning

Sensor Management In 2D Lidar Based Underground Positioning Kristin Nielsen and Gustaf Hendeby
The self-archived postprint version of this journal article is available at Linköping University Institutional Repository (DiVA): http://urn.kb.se/resolve?urn=urn:nbn:se:liu:diva-167482 N.B.: When citing this work, cite the original publication. Nielsen, K., Hendeby, G., (2020), Sensor Management In 2D Lidar Based Underground Positioning, Proceedings 2020 IEEE 23rd International Conference on Information Fusion (FUSION), , 765-772. https://doi.org/10.23919/FUSION45008.2020.9190382
Original publication available at: https://doi.org/10.23919/FUSION45008.2020.9190382 Copyright: Institute of Electrical and Electronics Engineers (IEEE) http://www.ieee.org/ ©2020 IEEE. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.

Sensor Management in 2D Lidar-BasedUnderground Positioning
Kristin Nielsen∗† and Gustaf Hendeby†∗Rocktec Automation; Epiroc Rock Drills AB; Örebro, Sweden
[email protected]†Dept. Electrical Engineering; Linköping University; Linköping, Sweden
Abstract—Lidar-based positioning in a 2D map is analyzed asa method to provide a robust, high accuracy, and infrastructure-free positioning system required by the automation developmentin underground mining. Expressions are derived that highlightseparate information contributions to the obtained position ac-curacy. This is used to develop two new methods that efficientlyselect which subset of available lidar rays to use to reduce thecomputational complexity and allow for online processing withminimal loss of accuracy. The results are verified in simulations ofa mid-articulated underground loader in a mine. The methods areshown to be able to reduce the number of rays needed withoutconsiderably affecting the performance, and to be competitivewith currently used methods. Furthermore, simulations highlightthe effects of errors in the map and other map properties,and how imperfect maps degrades the performance of differentselection strategies.
Index Terms—underground positioning, sensor management,sensor selection, lidar, mine localization
I. INTRODUCTION
Up until today, the majority of positioning systems availablein underground mines have focused on personal safety andemergency rescue, where knowledge of who is in the mineand at what level is enough [1]. However, a real-time, highlyaccurate positioning system would have the potential to signif-icantly improve safety for present human workers, contributeto the advancement of automated vehicle systems, and enablethe deployment of productivity improving fleet managementsystems for underground operations. [2].
Today, autonomous operation in underground mines ispossible for specific tasks and preconditions, e.g., loadersnavigating along prerecorded paths are commercially availablefrom Sandvik, Caterpillar, and Epiroc [3]. These systems relyon laser scanners, odometry, and inertial measurement units(IMUs) to solve their tasks. These applications do not requireglobal positioning due to prerecording of the environment.
Dead reckoning based localization, using IMUs and odom-etry, is a favorable solution as it requires no external infras-tructure and is robust to the dirty mine environment. However,it inherently suffers from drift [4] and cannot be used alonefor extended periods of time, but is an important componentwhen fused with other information sources [1, 5].
This work was partially supported by the Wallenberg AI, AutonomousSystems and Software Program (WASP) funded by the Knut and AliceWallenberg Foundation.
WiFi network [6], RFID [7, 8], and ultra wideband (UWB)[1, 9, 10] based methods are often put forward for indoorpositioning. WiFi and RFID have been reported to providemeter accuracy in office environments, but dust and fog aswell as roughness and irregularities in the walls distinguish theunderground environment from the indoor scenario. Attemptswith WiFi based positioning in underground environmentsreports lower accuracy [11, 12]. UWB is a promising technol-ogy due to its high precision (15 cm reported indoors [13]).However, metallic objects can cause disturbances [7] andsensitivity to optimal placement of the UWB anchors [14]limits the applicability in mines.
Another possible method is to compare lidar measurementsto a map [15]. This has been used with good results indoors,and uses the same sensors as existing commercial autonomousmine solutions have. Hence, this is the solution pursued in thispaper, taking into account the availability of accurate maps andlimited computing power.
The environment in an underground mine changes dynami-cally as the result of tunnels being extended, falling rocks, andwall reinforcements. Accurate map creation is considered in[2]. In this paper the map is assumed known beforehand, andthe effects of map inaccuracies are considered in the analysisand evaluation.
Lidars typically produce a high number of measurements toprocess. The loader considered in this paper features two 2Dlidars, each covering 180◦ and with a resolution of 1◦ at 20Hzand in the future 3D lidars with higher update rates are to beexpected resulting in even larger amounts of measurements.Hence, methods to limit the computations, without losingquality are necessary to achieve real time performance. Thisleads to the sensor selection problem studied in this paper.
The sensor selection problem is a well-known topic [16,17] and can be formulated as an optimization problem. Inthis particular case, to choose which individual lidar rays toprocess to maximize the accuracy in the position estimate. Ingeneral the optimization problem is computationally expensiveto solve. Convex relaxations [18, 19] can simplify, but theproblem is still too complex to be solved in real time. Greedy,but sub-optimal, approaches are therefore often used. Theyrequires a proxy of the quality measure that is sub-modularto guarantee optimality [20]. The mean square error (MSE)as a performance measure is not sub-modular, but often still

φip` α
mi
s
pj
ps0,j
e‖,j
h1(xk,M)p0 p1
p2
y
pj+1
hi
pj+2
x
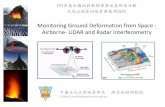
Fig. 1. An articulated vehicle with one lidar mounted at the front part ofthe vehicle and one at the rear part. The origin of the sensor fixed coordinatesystem is the point in the middle of the front wheel axis. The thin linesrepresent a subset of available laser rays.
performs well in simulations [21, 22].This paper studies the problem of positioning a loader in an
underground mine with help of lidar measurements and a 2Dmap of the environment. The contributions are the following:• A thorough analysis of the information available in the
lidar measurements. Expressions are derived, in whichthe contributions to the information are separated intocontributions related to the map and to the pose of thevehicle.
• Two different greedy methods to approximate the solutionto the sensor selection problem. One based on an analysisof the map, and one studying the obtained measurements.Both based on the analysis of the information content.
• Simulation studies to evaluate the properties of the theo-retical results.
This paper is structured as follows. First in Sec. II the esti-mation problem, the map representation, and a solution givenlidar measurements are presented. The information availablefrom the measurements is analyzed in Sec. III, and based onthis, solutions to the sensor selection problem are derived inSec. IV. The methods are then evaluated in Sec. V beforeconcluding remarks are given in Sec. VI.
II. POSITIONING SOLUTION
The pose of the considered mid-articulated loader is esti-mated using an unscented Kalman filter (UKF) which com-bines measured odometry and IMU data with how well lidarmeasurements fit the map. As illustrated in Fig. 1, the pose attime k, xk =
[xk, yk, θk
]T, comprise the Cartesian position
(xk, yk) in the map reference, and the heading θk. Thearticulation of the loader is assumed known.
A. Dynamic Model
The motion of the loader can be predicted based on odom-etry and IMU measurements as
xk+1 =
xk + vk cos θTyk + vk sin θT
θk + θ̇kT
+ uk, (1)
where the speed vk comes from the odometry, the changeof heading θ̇k from the gyroscope in the IMU, and T is thesample time. The process noise, uk, captures the errors in themeasured motion. It is assumed to be Gaussian white noise,uk ∼ N (0,Qk).
The process noise includes errors from the odometry, pre-dominately stemming from wheel slip and skidding, and noisein the IMU measurements, introduced by vibrations. Thesefactors, which might vary between scenarios depending onproperties of the mine environment, determine the noise levelsto use. For example, some wheel slip will almost certainlyoccur during bucket loading. Underground loaders typicallyhas the capacity to transport 10–20 tonnes of raw materialin their buckets. A filled/empty bucket will influence thedynamics of the vehicle, which has to be accounted for bythe noise level.
B. Lidar Measurements
The predicted pose is corrected by using the distance to themine walls, measured by the lidars mounted on the loader, asillustrated in Fig. 1. Each lidar covers 180◦ with a distancemeasurement each degree. The resulting measurements canmathematically be described by
yk =
h1(xk,M)h2(xk,M)
...hK(xk,M)
+ ek, (2)
where yk is a vector of measured ranges for each individuallaser ray at time step k, M represents the map, and ek isthe measurement noise which is assumed white and Gaussian,ek ∼ N (0,Rk).
Each laser ray i gives rise to
hi(xk,M) = ‖mi − xk‖, i = 1, . . . ,K, (3)
the distance to the wall in the direction of the ith ray, andwhere mi is the point in the map where the laser ray will hitthe wall. Hence, mi, is a function of the mapM and the poseof the loader. The point mi can, e.g., be determined using raycasting.
The error in the lidar measurements originates mainly fromfour sources:• Errors in the map.• Errors due to the assumption of a planar 2D world. The
lidars are mounted at a fixed height and since the groundwhere the vehicle is driving is not perfectly planar, theroll and pitch of the vehicle will make the laser ray hita different vertical spot on the wall than intended. Thisadds errors especially for long range measurements dueto the angle of the measurement.
• Errors from the underlying physics of the lidar. At largeranges the rays become cone shaped. This makes the errordepend on the range of the measurement and also theinclination angle of the ray to the wall. [23]

z
pj pj+1m′
m
wall
map
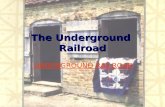
Fig. 2. The error in a map can be described by the perpendicular disturbancez in a point m′ in the map.
• Errors from the articulation angle sensor, which causesthe ray to be cast in a different direction than expected,resulting in the wrong distance being measured.
For simplicity, the measurement noise in each direction canbe assumed independent, resulting in a diagonal covariancematrix Rk.
C. Map Representation
The predefined 2D map consists of line segments puttogether to build up the wall structure of the area of operationseen from above, see Fig. 1. The map, M, is represented bya set of corner points,
M = {p0,p1, . . . ,pn}, (4)
listed in a counter clockwise manner. The straight line seg-ments
`j = pj+1 − pj , (5)
connecting the points represent the walls. Any points on a wallsegment can be parametrized as
m = ps0,j + se‖,j , (6)
with j ∈ [0, n− 1], s as a scalar distance parameter, ps0,j asthe point on `j where s = 0 and
e‖,j =pj+1 − pj‖pj+1 − pj‖
. (7)
A map can be acquired by a pre-mapping procedure wherelaser data is recorded either by the loader itself or by someother vehicle. Or, the map can be obtained from drawingsmade during the planning phase of the mine area. Bothacquisition methods incorporate errors in the map due to thewalls not being flat in the vertical direction, but also longstraight tunnels drifting in direction. The former method willgive a map with a more refined resolution of irregularities ofthe walls and the latter will give more conceptual maps withsmoother walls.
The error in a map can be described as a perpendiculardisturbance
z = ze⊥,j (8)
at a point m′ in the imperfect map, see Fig. 2. A point on thewall, or a point in a more accurate map, can then be writtenas
m = m′ + z. (9)
D. Unscented Kalman Filter
The unscented Kalman filter (UKF) [24] will be used toprovide estimates of the pose of the loader. It is used as anapproximation of the Kalman filter. The UKF approximation issuitable for problems where differentiating the motion and/ormeasurement model is hard, as it only relies on functionevaluations. This is advantageous as the ray casting step inthe measurement model is difficult to differentiate. See [25]for a complete derivation of the UKF. Implementation detailscan be found in [26, 27].
III. INFORMATIVE SENSOR MEASUREMENTS
The sensor selection problem consists of finding the subsetof lidar measurements that are as informative as possible withregard to the position estimate.
A. Cramér-Rao Lower Bound
The Cramér-Rao lower bound (CRLB) provides a lowerbound of the variance of any unbiased estimator of x,cov(x̂) � I−1(x) where
I(x) = −Ey(∇2x log p(x,y)), (10)
given mild regularity conditions [28]. I(x) is the Fisherinformation matrix (FIM) and information from independentmeasurements are additive
I(x) =
K∑i=1
Ii(x). (11)
The individual measurements in (3), each give rise to aninformation contribution
Ii(x) = ∇Txhi(xk,M)R−1i ∇xhi(xk,M). (12)
Summing up the individual contributions yields the totalinformation gained by one full lidar scan measurement. Theremainder of this section outlines the different contributionsto this information gain.
B. Information in Lidar Measurements
First consider the derivative ∇xhi(xk,M) as defined in(3), where the arguments will be dropped to simplify thenotation. A large value of this derivative will produce a largeinformation contribution. The interpretation of it is the changein distance from the laser sensor to the wall, when the vehiclepose is perturbed. The chain rule yields
∇xhi = ∇r ‖r‖∇x (p`(x)−mi(x, φi)) . (13)
where r = mi−p`, and p` is the position of the laser sensor.The first factor turns into a projection on the direction of
the ray, given by the unit vector eφi. This gives the first term
∇r ‖r‖∇xp` = eTφi
([I2×2 02×1]) , (14)
which is interpreted as an information contribution in thedirection of the ray that is always present independently ofthe map and the state.

Applying the chain rule again on the second term yields
−eTφi∇xmi = −eTφi
∇smi∇xs = −eTφie‖,j∇xs (15)
where the last equality is from (6). This term describes howthe vehicle position, relative the angle of the line segment,determines in what direction the measurement is informative.All scaled by the inclination angle of the laser ray to the linesegment of the wall.
In total
∇xhi = eTφi
([I2×2 02×1]− e‖,j∇xs
), (16)
which holds if the map is perfect without errors.
C. Imperfect Map
Incorporate the error representation introduced by (8) and(9) yields
∇xhi = eTφi
([I2×2 02×1]− e‖,j∇xs+∇szie⊥,j∇xs
), (17)
noticing that e‖,j and e⊥,j now refer to a line segment inthe imperfect map. The contribution from this new third termto the state estimate, explains how errors in the map affectthe position estimate. Assuming that the imperfect map is asmoother representation of the walls not capturing all irregular-ities, another interpretation is the influence of roughness of thewall on the information contribution. If the non-smoothnesswould be captured in the map, this term gives the informationcontribution by the small irregularities.
The information from one single laser ray can be calculatedby,
∇Txhi∇xhi =
[eφie
Tφi
02×1
01×2 0
]−(eTφi
e‖,j +∇szieTφie⊥,j
)([eφi
0
]∇xs+∇xs
T[eTφi
0])
+(1 + (∇szi)2
)∇xs
T∇xs, (18)
neglecting R−1i since it is just a scalar constant for anindividual laser ray. As already mentioned ∇xs explains thedirection of the information contribution, this is then scaledby the inclination angle of the ray to the wall and by ∇szi.∇szi is independent of the position of the vehicle and dependsonly on the map. Therefore in theory, it is possible to inspectonly the map to find regions with a large potential of givinginformation measurements. Problems arise if the resolution ofthe irregularities are higher than the resolution of the sensoror the uncertainty of the positions, or if they are simply notincluded in the imperfect map.
The information contribution from a single laser ray isgreater when the inclination angle is smaller, i.e., eφi
is closeto parallel to the wall. This is problematic since the uncertaintyof the measurement increases at the same time due to the coneeffect of the laser ray. It is therefore unreliable to maximizethe information on this objective alone.
Using the geometry of the problem (see Fig. 1), an explicitexpression for the parametrization of a line segment can beobtained
s =|ps0 − p`|
tanα, (19)
where α = arccos(eT‖,ieφi). This yields the gradient
∇xs =|ps0 − p`|sin2 α
[0 0 1
]− cosα
sin2 α
[eTφi
0]+
1
tan2 α
[eT‖,i 0
] (20)
where the first term is the contribution in the heading directionof the vehicle, and the second and third terms is in the transla-tional directions. Also here the problem with the contributionin each direction being greater when the inclination angle issmall is present.
D. Map Corner Points
Up until now, it is assumed that which line segment a laserray hits is known. In close vicinity to the corner points pjthis is uncertain. Here, ∇xs is undefined and adopts differentvalues if the corner is approached along `j or `j+1. Thedifference between the values depend on the angle betweenthe two line segments and the inclination angle of the laserray.
A large difference implies that the measurement is infor-mative. Corners can be either convex or concave and a largeangle between the line segments will in general increase thelikelihood of getting informative measurements. But, howmuch this effect can be utilized depends on the inclinationangle of the ray.
IV. INFORMATIVE SENSOR SELECTION
Sec. III provides tools to offline analyze a map to gainknowledge about which regions of the map that will give par-ticularly informative laser measurements. This section studieshow the actual sensor selection can be performed with thisknowledge in mind.
A. Sensor Selection Problem
First let us introduce a sensor selection vector
w = [w1, w2, . . . , wM ]T (21)
where each wm ∈ {0, 1} and wm = 1 indicates that the mthlaser measurement is selected. Using the additive property ofthe FIM allows for rewriting of (11) as
I(x) =M∑m=1
wmIm(x). (22)
With a Bayesian approach the a priori error covariance can betaken into account [29], then the FIM can be decomposed intoone part ID, from the obtained data, and one part IP , fromthe a priori error covariance,
I = ID + IP =
M∑m=1
wmIm(x) + IP . (23)

By letting P represent the a priori error covariance, assumedGaussian, the expression for the FIM follows,
I =M∑m=1
wmIm(x) + P−1. (24)
Using the trace of the covariance matrix of the state estimateas a scalar performance measure, the sensor selection problemcan be formulated as an optimization problem. Select K lasermeasurements out of the total M that minimizes the trace ofthe inverse FIM
minimize tr
[ M∑m=1
wmIm(x) + P−1]−1
subject to 1Tw = k
wm ∈ {0, 1} , m = 1, . . . ,M.
(25)
Solving this optimization problem will give the best set oflaser measurements in each measurement update; but it is notcomputationally feasible to solve, not even for rather smallvalues of K and M . Below, three different sensor selectionstrategies are presented with this in mind.
B. Uniformly Distributed (UNI)
The least computationally demanding and most straight for-ward strategy, is to select rays uniformly over the transmissionangle. This strategy will be referred to as uniformly distributed(UNI). Every i th ray is selected and the result is sensitive towhich ray chosen as starting index. No information about themap or the position of the vehicle is taken into consideration;but, this strategy is fast and computationally efficient. The UNIstrategy is today used in applications where the computationalresources are not enough to process all laser rays, and istherefore used as a benchmark in the experiments section.
C. Greedy with Adjacent Rays (GAR)
A computationally feasible strategy is to solve the opti-mization problem with a greedy approach. Solve (25) for onemeasurement, fixate it in the set of selected measurements,and then again solve (25) with the remaining measurements.Continue iteratively until K measurements are selected. Thismethod does not provide any optimality guarantees [21]. Forthe system of the mid-articulated loader, Fig. 3 shows howthe CRLB decreases when the number of laser measurementsused increases. Fig. 3 shows that the greedy approach is atleast better than the UNI strategy.
Even though the greedy approach makes the problem feasi-ble it is still too computationally heavy to perform online. Ifa point or region in the map is identified as informative, theselection strategy should make sure to capture that point/regioneven if the current position is uncertain. Therefore, it makessense to select a burst of adjacent rays rather then selectingthem one by one. Denote this strategy greedy with adjacentrays (GAR). Fig. 4 indicates that the information captured ina laser scan is very concentrated to only a few laser rays. Ascan with 60 uniformly distributed rays is only as informativeas 5 wisely chosen ones.
0 50 100 150 200 250 300 350 400
Number of laser measurements used
10-2
10-1
100
101
tr(C
RLB
)
Greedy approachUniformly distributedUniformly Averaged
Fig. 3. The trace of the CRLB of the pose estimate when an increasingnumber of laser measurements are used. This is for Pose A in Fig. 5 in therealistic map (the blue one). The red line is for a single instance of the UNIstrategy, and the dotted green line is when the UNI strategy is averaged overall possible starting index offsets of the transmission angle.
20 40 60 80 100 120
[m]
20
30
40
50
60
70
[m]
Fig. 4. For Pose D in Fig. 5 the trace of the CRLB is 0.0086 using 60uniformly distributed rays. This is the black rays in the image. The 8 redlaser rays are chosen according to the greedy approach, which yields only0.0079 as the trace of the CRLB.
The selection strategy is then to first use the greedy ap-proach to select a few laser rays, then add adjacent rays tocompensate for the position uncertainty. If any of the firstgreedily selected rays are close to any other, there is a riskfor selecting the same ray twice when adding adjacent rays.If that is the case, the algorithm will add more adjacent raysfrom one side.
D. Local Difference in Measurement Data (LDM)
To cut the computational cost even more, a strategy is toconsider only the observed lidar measurements, and assumethat the properties of the map is incorporated in that data.This selection strategy will be referred to as local differencein measurement data (LDM). The idea is to compute thelocal difference in range between all adjacent pairs of laserrays, and then select the pairs that has a high difference. Thiscorresponds to measurements where ∇xs, and possibly also

∇sz are large in magnitude. Typically, a convex corner wherethe ray either hits or miss the wall will be selected. There isalso a possibility that the high difference corresponds to onlya large ∇sz. This could be a large irregularity or, if the mapis not perfect, it could be an error in the map. In that case theselected measurement will give false information.
Due to the position uncertainty this strategy will select a fewhigh-difference pairs, and then add adjacent rays. This strategyhowever, completely ignores in which direction (x, y, or θin the state vector) the sensor measurement is informative. Itwill only find regions that has large ∇xs in magnitude, but thecomponents of ∇xs are completely unknown. The first term in(18), tells us that a measurement always gives information inthe aiming direction. At least for the Cartesian x, y directions.To avoid a situation where all selected rays are informative inthe same direction, this strategy spreads the aiming angles ofthe selected rays by splitting the observable half disc of eachlidar into equally sized sections. In each section the ray pairwith the largest difference is selected and adjacent rays areadded. If the selected pair is close to the border of the sectionthe adjacent rays are added from only one side.
V. EXPERIMENTS
A simulation study is conducted to show how the differentselection strategies UNI, GAR and LDM, performs with regardto the precision in the position estimate. The strategies arealso compared to the case of using all available measurementswithout selection.
A. Setup
The two horizontally mounted lidars in total produce 362laser measurements in each scan, 60 of them are selectedfor processing. With the GAR strategy, 6 rays are selectedaccording to the greedy approach and then 9 adjacent rays areincluded. In the LDM strategy, each observable half disc ofthe lidars is split into 3 sections, where the pair with largestnumerical derivative is selected and then adjacent rays areadded.
Simulations are performed with two different maps coveringthe same operational area. One is created from real sensor dataand the other one is a synthetic version with straight walls,referred to as the realistic and simplified map, respectively.Laser scans are simulated by geometrically calculating theranges from the lidar position to the wall and then add whiteGaussian noise with standard deviation 35mm according tothe specification of the physical Lidar (sick LMS500 series).
In the operation area, four vehicle poses with differentconditions for position estimation have been chosen whereone measurement update of the UKF is performed, see Fig. 5.Pose A is in the middle of a long tunnel, far away from cornersthat can give a high value of ∇xs, which makes this pose hardfrom a positioning point of view. At least in the x-direction. InPose B a T-junction is present just ahead of the vehicle, whichputs a few points with large ∇xs into the field of view of thelidar. In Pose C and D the vehicle is placed in the middleof a cross-section where a lot of informative points/regions in
Fig. 5. Different poses considered for one measurement update of the UKF.The two maps are overlaid with the simplified map in green and the realisticmap in blue.
Fig. 6. The RMSE from 10000 realizations when one measurement update isperformed for different selection strategies of laser measurements. See Fig. 5for the vehicle poses A, B, C and D. The edges of the boxes indicates 25thand 75th percentiles, and the median is marked with a horizontal line. Thewhiskers extend to the most extreme data points not considered outlier, andoutliers are marked individually with a circle.
the map is visible in the sensor measurements. This situationis easier with regards to the position estimation, but is morecomplex for the selection strategies to prioritize what regionsare most important.
The UKF is tuned as α = 0.8, β = 2, κ = 0 and themeasurement noise covariance is, R = 0.0352I. The values ofβ and κ are commonly used standard values, while the valuefor α is non-standard, tuned for this particular application byprior experiments.
The initial pose is perturb with a prior uncertainty withcovariance
P0 =
10−4 0 00 10−4 00 0 10−6
, (26)
intended to reflect the desired precision in the state estimate.The precision on the heading is in accordance with the desiredtranslational precision on the rear corner of the vehicle.
B. Simplified Map
Fig. 6 shows the root mean square error (RMSE) of thestate vector after the correction is performed in the simplified

Fig. 7. The RMSE when one correction step is performed in the different
poses, when the prior uncertainty, P0 = σ2
(1 0 00 1 00 0 0.17452
)is increased. The
blue horizontal lines are√
tr(P0) for each value of σ2. All 362 availablelaser measurements are used.
map. For Pose A, the GAR strategy outperforms the otherstrategies, and in Pose B this is even more emphasized. InPose C and D where a lot of corners are present LDM, andGAR gives far better results than the UNI strategy. They areeven at the same order of magnitude as when all 362 rays areprocessed. Since the LDM strategy is computationally cheapcompared to the GAR strategy, it is worth noting that theyperform equally when there is a lot of information in the map.When the information is sparser in the map, LDM performsworse.
C. Realistic Map
Fig. 6 also shows the results from the same simulationsetup applied on the realistic map. As for the simplified map,in general GAR is the best performing strategy. For Pose Cand D the RMSE for all strategies are higher than for thesimplified map, which means that the pose estimate cannottake advantage of the irregularities of the walls. Not even whenusing all 362 rays. The relatively large value of α can causethe filter to smooth out the irregularities. Or, the uncertaintyin the pose causes the ray to hit the wrong small feature. Inthe realistic map the irregularities of the walls are on the orderof decimeters, and P0 is in the order of centimeters. But (20)together with the results in Fig. 7 where the correction step isperformed with increasing prior uncertainty in the state vector,indicates that this is not enough. If it were, the RMSE wouldbe smaller in the realistic map compared to the simplified whenthe prior uncertainty is decreased. The heading componentin (20) describes how ∇xs gets larger in magnitude forlong range measurements with small inclination angles, whichmeans the measurements with these characteristics have a goodpotential of being informative. But, if ∇xs is larger than theirregularities of the walls, these measurements will give falseinformation since they hit the wrong irregularity. The risk toencounter this effect increases for long range measurementswith small inclination angles.
Fig. 8 depicts how the rays are selected in Pose D for thedifferent selection strategies. The GAR strategy selects fewer
Fig. 8. The selected rays for different strategies are visualized for Pose D.Grey lines are UNI, red is GAR and blue is LDM. The purple fields are whenGAR and LDM strategies overlaps.
Fig. 9. The RMSE when one correction step is performed with laser datasimulated in the realistic map and the estimation done in the simplified map.
The prior uncertainty, P0 =
(1 0 00 1 00 0 0.17452
). The blue horizontal line is√
tr(P0).
long range measurement than the LDM strategy and that isprobably why it performs better in this situation.
There is an interesting situation in Pose B and C where usingall 362 rays are worse than any of the selection strategies.Since this cannot be seen in the simplified map this is probablyalso an effect of the rays hitting the wrong irregularity.
D. Map with Errors
To simulate a scenario of a map with errors, now considerthe realistic map as a perfect representation of the walls,and the simplified map is the only available map. Lidarobservations are simulated from the realistic map and theposition estimation is performed in the simplified map, seeFig. 9 for results. To get the estimated pose to be more accurateafter the correction step than before, P0 had to be increasedto meter precision for this simulation. That is not surprisingsince the errors in the map are of this order of magnitude.
The LDM strategy performs poorly when there are errorsin the map. Regions/points of interest that are captured inthe observed data are simply not present in the map. That is

according to the results worse than the opposite, choose pointsof interest in the map and then receive measurements that arenot corresponding, as is the case for the GAR strategy. Butneither LDM nor GAR are significantly better than the UNIstrategy when this type of errors are present in the map.
VI. CONCLUSION
The demand of robust, highly accurate, infrastructure-freepositioning systems for the underground mining industry iscomplicated by real-time requirements and limited computa-tional resources. In this work we have shown the possibilityto reduce computational complexity while preserving qualityin a 2D lidar-based position estimate by cleverly selecting asubset of laser measurements.
By analyzing the information contribution of each laserray measurement, expressions were derived that separates thecontribution from the map geometry itself and the relativesensor position. The expressions expose a contradiction forlong range measurements with small inclination angles. Theseare potentially the most informative measurements, but on thesame time the measurements with largest error. Especially inmaps with high resolution of irregularities of the wall, thereis a risk that the laser ray hits the wrong feature in the mapdue to prior uncertainty of the position. Additionally, in caseof an imperfect map the features might not even be present.
The information analysis indicated which ray measurementsare informative and have been used to develop two selectionstrategies. One is based on map geometry and the other oneon observed data. Simulation experiments have shown animprovement in accuracy of the position estimate compared tothe baseline strategy of uniformly selecting laser rays for bothstrategies. The strategy based on map geometry performedslightly better than the one base on observed data, but the latterrequired less computational resources. In the situation of aflawed map, simulations indicate that the developed strategieslose performance. Future work will therefore target the issueof finding strategies that robustly handles imperfections in amap.
REFERENCES
[1] L. Thrybom, J. Neander, E. Hansen, and K. Landernas, “Future chal-lenges of positioning in underground mines,” in Proc. 2nd IFAC Conf.on Embedded Systems, Computer Intelligence and Telematics CESCIT,vol. 48, no. 10, Maribor, Slovania, 2015, pp. 222–226.
[2] U. Artan, J. A. Marshall, and N. J. Lavigne, “Robotic mapping ofunderground mine passageways,” Mining Technology, vol. 120, no. 1,pp. 18–24, 2011.
[3] J. Paraszczak, A. Gustafson, and H. Schunnesson, “Technical andoperational aspects of autonomous LHD application in metal mines,”International Journal of Mining, Reclamation and Environment, vol. 29,no. 5, pp. 391–403, 2015.
[4] H.-J. Kwak, D.-H. Lee, J.-M. Hwang, J.-H. Kim, C.-K. Kim, and G.-T.Park, “Improvement of the inertial sensor-based localization for mobilerobots using multiple estimation windows filter,” in Proc. IEEE/RSJ Int.Conf. on Intelligent Robots and Systems, Vilamoura, Portugal, 2012, pp.876–881.
[5] C. A. Niestroj, C. Niedringhaus, and K. Nienhaus, “Development ofan underground positioning system based on the ultra-wideband radiotechnology,” Mining report, vol. 153, no. 1, pp. 69–76, 2017.
[6] G. Jekabsons, V. Kairish, and V. Zuravlyov, “An analysis of wi-fibased indoor positioning accuracy,” Scientific Journal of Riga TechnicalUniversity. Computer Science, vol. 44, no. 1, pp. 131–137, 2011.
[7] H. Liu, H. Darabi, P. Banerjee, and J. Liu, “Survey of wireless indoorpositioning techniques and systems,” IEEE Trans. Syst., Man, Cybern.C, vol. 37, no. 6, pp. 1067–1080, 2007.
[8] R. Mautz, “The challenges of indoor environments and specificationon some alternative positioning systems,” in Proc. 6th Workshop onPositioning, Navigation and Communication, Hannover, Germany, 2009,pp. 29–36.
[9] M. A. Al-Ammar, S. Alhadhrami, A. Al-Salman, A. Alarifi, H. S. Al-Khalifa, A. Alnafessah, and M. Alsaleh, “Comparative survey of indoorpositioning technologies, techniques, and algorithms,” in Proc. Int. Conf.on Cyberworlds, Santander, Spain, 2014, pp. 245–252.
[10] A. Chehri, P. Fortier, and P. M. Tardif, “UWB-based sensor networks forlocalization in mining environments,” Ad Hoc Networks, vol. 7, no. 5,pp. 987–1000, 2009.
[11] J. C. Ralston, C. O. Hargrave, and D. W. Hainsworth, “Localisation ofmobile underground mining equipment using wireless ethernet,” in 40th
IAS Annual Meeting. Conf. Record of the Industry Applications Conf.,vol. 1, Kowloon, Hong Kong, China, 2005, pp. 225–230.
[12] M. Cypriani, G. Delisle, and N. Hakem, “Wi-Fi-based positioning in acomplex underground environment,” Journal of Networks, vol. 10, no. 3,2015.
[13] A. Yassin, Y. Nasser, M. Awad, A. Al-Dubai, R. Liu, C. Yuen,R. Raulefs, and E. Aboutanios, “Recent advances in indoor localization:A survey on theoretical approaches and applications,” IEEE Commun.Surveys Tuts., vol. 19, no. 2, pp. 1327–1346, 2017.
[14] A. E. Assaf, S. Zaidi, S. Affes, and N. Kandil, “Accurate sensorslocalization in underground mines or tunnels,” in Proc. IEEE Int. Conf.on Ubiquitous Wireless Broadband (ICUWB), Montreal, QC, Canada,2015, pp. 1–6.
[15] H. Chi, K. Zhan, and B. Shi, “Automatic guidance of undergroundmining vehicles using laser sensors,” Tunnelling and Underground SpaceTechnology, vol. 27, no. 1, pp. 142–148, 2012.
[16] G. W. Ng and K. H. Ng, “Sensor management – what, why and how,”Information Fusion, vol. 1, no. 2, pp. 67–75, 2000.
[17] A. O. Hero and D. Cochran, “Sensor management: past, present, andfuture,” IEEE Sensors J., vol. 11, no. 12, pp. 3064–3075, 2011.
[18] S. Joshi and S. Boyd, “Sensor selection via convex optimization,” IEEETrans. Signal Process., vol. 57, no. 2, pp. 451–462, 2009.
[19] S. P. Chepuri and G. Leus, “Sparsity-promoting sensor selection fornon-linear measurement models,” IEEE Trans. Signal Process., vol. 63,no. 3, pp. 684–698, 2015.
[20] S. Rao, S. P. Chepuri, and G. Leus, “Greedy sensor selection for non-linear models,” in Proc. IEEE 6th Int. Workshop on ComputationalAdvances in Multi-Sensor Adaptive Processing (CAMSAP), Cancun,Mexico, 2015, pp. 241–244.
[21] H. Zhang, R. Ayoub, and S. Sundaram, “Sensor selection for Kalmanfiltering of linear dynamical systems: complexity, limitations and greedyalgorithms,” Automatica, vol. 78, pp. 202–210, 2017.
[22] M. Shamaiah, S. Banerjee, and H. Vikalo, “Greedy sensor selection:leveraging submodularity,” in Proc. 49th IEEE Conf. on Decision andControl (CDC), Atlanta, GA, USA, 2010, pp. 2572–2577.
[23] D. Nitzan, A. E. Brain, and R. O. Duda, “The measurement and useof registered reflectance and range data in scene analysis,” Proc. IEEE,vol. 65, no. 2, pp. 206–220, 1977.
[24] S. J. Julier, J. K. Uhlmann, and H. F. Durrant-Whyte, “A new methodfor the nonlinear transformation of means and covariances in filters andestimators,” IEEE Trans. Autom. Control, vol. 45, no. 3, 2000.
[25] S. Särkkä, Bayesian filtering and smoothing, ser. Institute of Mathemat-ical Statistics Textbooks. Cambridge University Press, 2013.
[26] E. A. Wan and R. V. D. Merwe, “The unscented Kalman filter fornonlinear estimation,” in Proc. IEEE Adaptive Systems for SignalProcessing, Communications, and Control Symp. (Cat. No.00EX373),Lake Louise, Alberta, Canada, 2000.
[27] R. Van der Merwe and E. A. Wan, “The square-root unscented Kalmanfilter for state and parameter-estimation,” in Proc. 2001 IEEE Int. Conf.on Acoustics, Speech, and Signal Processing (Cat. No.01CH37221),vol. 6, Salt Lake City, UT, USA, 2001, pp. 3461–3464.
[28] S. M. Kay, Fundamentals of statistical signal processing - estimationtheory. Prentice Hall, 1993.
[29] P. Tichavsky, C. H. Muravchik, and A. Nehorai, “Posterior Cramer-Rao bounds for discrete-time nonlinear filtering,” IEEE Trans. SignalProcess., vol. 46, no. 5, pp. 1386–1396, 1998.