Sandia National Laboratories Graph Partitioning Workshop Oct. 15, 1999 1 Load Balancing Myths,...
23
Sandia National Laboratories Graph Partitioning Workshop Oct. 15, 1999 1 Load Balancing Myths, Fictions & Legends Bruce Hendrickson Sandia National Laboratories Parallel Computing Sciences Dept.
-
Upload
poppy-douglas -
Category
Documents
-
view
220 -
download
2
Transcript of Sandia National Laboratories Graph Partitioning Workshop Oct. 15, 1999 1 Load Balancing Myths,...

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19991
Load BalancingMyths, Fictions & Legends
Bruce Hendrickson
Sandia National Laboratories
Parallel Computing Sciences Dept.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19992
Introduction
Two happy occurrences.» (1) Good graph partitioning tools & software.
» (2) Good parallel efficiencies for many applications.
Is the latter due to the former?
Yes, but also no.
We have been lucky!» Wrong objectives.
» Models insufficiently general.
» Software tools often poorly designed.
Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19993
Myth 1:The Edge Cut Deceit
Generally believed that “Edge Cuts = Communication Cost”.
This assumption is behind the use of graph partitioning.
In reality:» Edge cuts are not equal to communication volume.
» Communication volume is not equal to communication cost.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19994
Edge Cuts Versus Volume
Edge cuts = 10.
Communication volume:
8 (from left partition to right partition).
7 (from right partition to left partition).

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19995
Communication Volume
Assume graph edges reflect data dependencies.
Correct accounting of communication volume is:» Number of vertices on boundary of partition.
Elegant alternative is hypergraph model of Çatalyürek, Aykanat, Pinar and Pinar.» Volume is number of cut hyperedges.
Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19996
Communication Cost
Cost of single message involves volume and latency.
Cost of multiple messages involves congestion.
Cost within application depends only on slowest processor.
Our models don’t optimize the right metrics!

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19997
Why DoesGraph Partitioning
Work?
Vast majority of applications are computational meshes.» Geometric properties ensure that good partitions exist.
– Communication/Computation = n1/2 in 2D, n2/3 in 3D.– Runtime is dominated by computation.
» Vertices have bounded numbers of neighbors.– Error in edge cut metric is bounded.
» Homogeneity ensures all processors have similar subdomains.– No processor has dramatically more communication.
Other applications aren’t so forgiving.– E.g. Interior point methods, latent semantic indexing, etc.
We have been lucky!

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19998
Myth 2: Simple Graphs are
Sufficient
Graphs are widely used to encode data dependencies.» Vertex weights reflect computational cost.
» Edge weights encode volume of data transfer.
Graph partitioning determines data decomposition.
However, many problems are not easily expressed this way!» Complex relationships or constraints on partitioning.
– E.g. computation on nodes and on elements.– DRAMA has a uniquely rich model for this problem.
» Dependencies are directed (e.g. unsymmetric matvec).
» Computation consists of multiple phases.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 19999
Alternative Graph Models
Hypergraph model (Aykanat, et al.)» Vertices represent computations.» Hyperedge connects all objects which produce/use datum.» Handles directed dependencies.
Bipartite graph model (H. & Kolda)» Directed graph replaced by equivalent bipartite graph.» Handles directed dependencies.» Can model two-phase calculations.
Multi-Objective, Multi-Constraint (Schloegel, Karypis & Kumar)» Each vertex/edge can have multiple weights.» Can model multiple-phase calculations.
Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199910
Myth 3: Partition Quality is Paramount
Partitioners compete on edge cuts» and (sometimes) runtime.
This isn’t the full story» particularly for dynamic load balancing!

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199911
7 Habits of Highly Effective Dynamic Load
Balancers
Balance the load» Balance each phase or some combination?
» How is load measured? Minimize communication cost
» Volume? Number of messages? Something else? Run fast in parallel Be incremental
» Make new partition similar to current one Not use too much memory Support determination of new communication pattern Be easy to use
Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199912
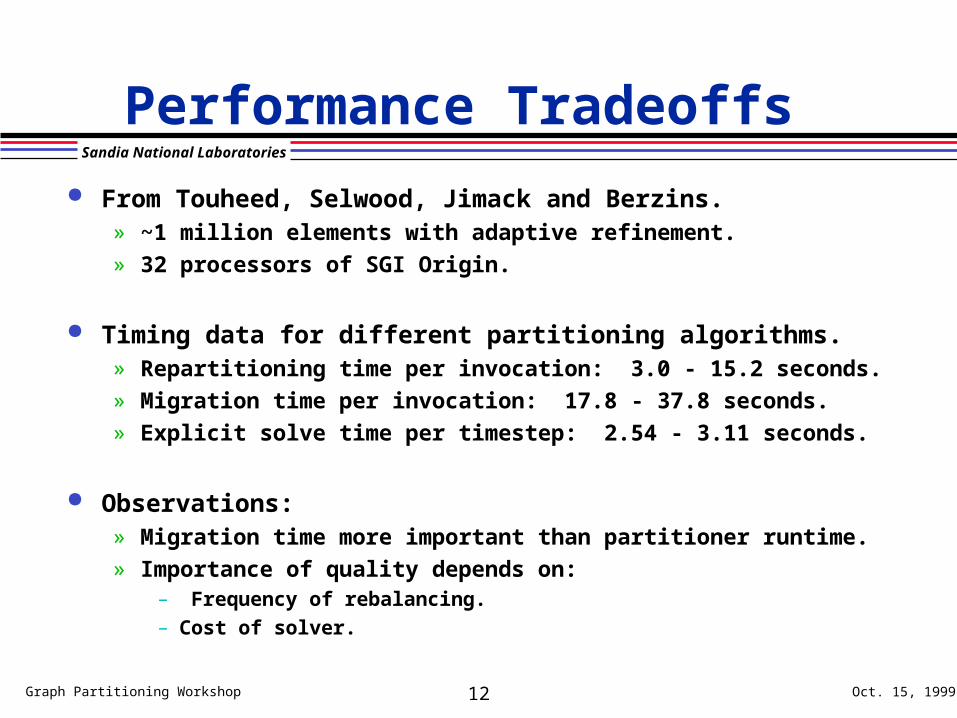
Performance Tradeoffs
From Touheed, Selwood, Jimack and Berzins.» ~1 million elements with adaptive refinement.
» 32 processors of SGI Origin.
Timing data for different partitioning algorithms.» Repartitioning time per invocation: 3.0 - 15.2 seconds.
» Migration time per invocation: 17.8 - 37.8 seconds.
» Explicit solve time per timestep: 2.54 - 3.11 seconds.
Observations:» Migration time more important than partitioner runtime.
» Importance of quality depends on:– Frequency of rebalancing.– Cost of solver.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199913
Myth 4: Existing Tools Solve the Problem
Lots of good software exists.
Static partitioning is fairly mature.» However, it addresses an imperfect model.
Dynamic partitioning is more complicated.» Applications differ in need for cost, quality or incrementality.
» No algorithm is uniformly best.
» Good library should support several (e.g. DRAMA).
» Subroutine interface requires good software engineering.– E.g. Zoltan?.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199914
Myth 5: The Key is Finding the Right
Partition
Assignment of work to processors is the key to scalability.
However, this needn’t be a single partition.
Example: parallel crash simulations.» In each timestep:
– (1) Do finite element analysis & predict new deformations.– (2) Search for grid intersections (contact detection).– (3) If found, correct deformations & forces.
» Each stage has different objects & different data dependencies.
» Very difficult to balance them all with one decomposition.– But most work on this problem has taken this approach.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199915
Multiple Decompositions
Finite element analysis:» Topological
» Static
Contact detection:
» Geometric
» Dynamic
Key Idea:» Use graph partitioning for finite element phase
» Use geometric partitioner for contact detection– We use recursive coordinate bisection (RCB)

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199916
Parallel Crash Simulations
Outline of parallel timestep in Pronto code:» 1. Finite element analysis in static, graph-based decomposition.» 2. Map contact objects to RCB decomposition.» 3. Update RCB decomposition.» 4. Communicate objects crossing processor boundaries.» 5. Each processor searches for contacts.» 6. Communicate contacts back to finite element decomposition.» 7. Correct deformations, etc.
Observations:» Reuse serial contact software.» RCB is incremental & facilitates determination of communication.» Each phase should scale well.» Cost of mapping between decompositions?

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199917
Can Crush Example
Finite elementdecomposition
RCB Decompositionas can gets crushed
RCB onundeformedgeometry

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199918
Scalability Can crush problem, 3800
elements per compute node, run to 100 ms.A 13.8-million element simulation on 3600 compute nodes ran at 0.32 seconds per time step (120.4 Gflops/s).
contacts
FEM
overhead
Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199919
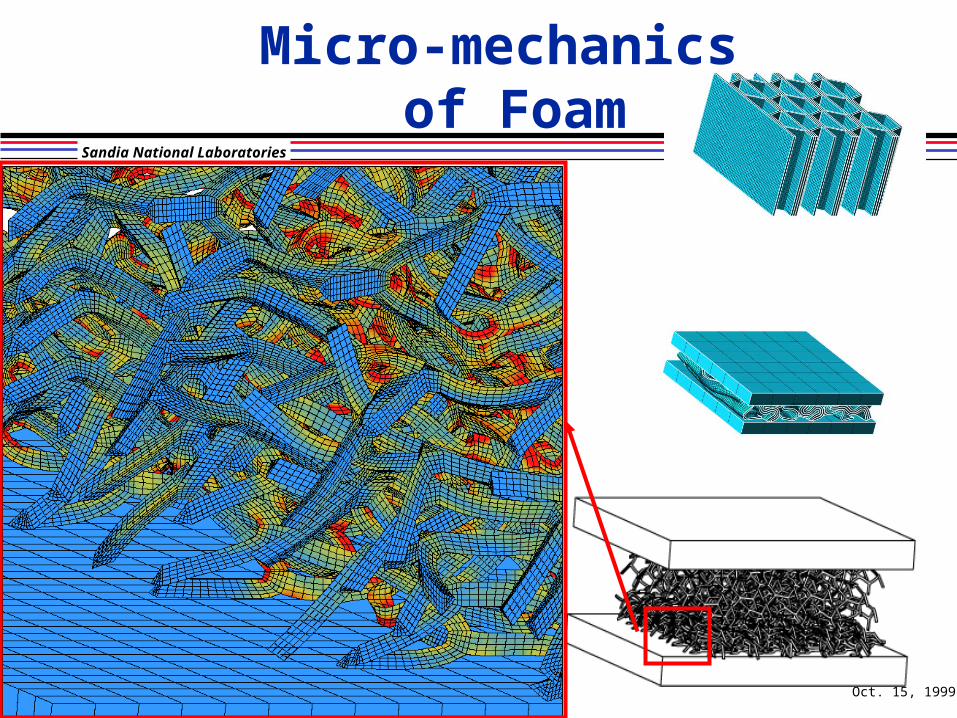
Micro-mechanics of Foam

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199920
Myth 6:All the Problems are
Solved
Biggest & most damaging myth of all!
Already discussed need for:» More accurate & expressive models.
» Algorithms for partitioning new models.
» More user-friendly tools.
Lots of other open problems.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199921
Open Problems
Partitioning for multiple goals.» Examples:
– Multiple phases in a calculation.– Minimize communication volume and number of messages.
» Multi-objective/constraint work is partial answer.– Only models costs on graph vertices or edges.– Can’t minimize number of messages.
» New ideas are needed.
Partition to balance work of sparse solve on each subdomain.» Applications to FETI preconditioner, parallel sparse solvers, etc.
» Complicated dependence on topology of submesh.
» Can’t predict cost by standard edge/vertex weights.

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199922
More Open Problems
Partitioning for heterogeneous parallel architectures.» E.g. Clusters of SMPs, Beowulf machines, etc.
» How to model heterogeneous parallel machines?
» How to adapt partitioners to address non-standard architectures?
» (See Teresco, Beall, Flaherty & Shephard.)
Partitioning to minimize congestion.» Communication is limited by most heavily used wire.
» How can we predict and avoid contention for wires?
» (See Pellegrini or H., Leland & Van Driessche.)

Sandia National Laboratories
Graph Partitioning Workshop Oct. 15, 199923
More Information
Contact info:» [email protected]
» http://www.cs.sandia.gov/~bahendr
Collaborators:» Rob Leland Karen Devine Tammy Kolda
» Steve Plimpton Bill Mitchell
Work supported by DOE’s MICS program
Sandia is a multiprogram laboratory operated by Sandia Corporation, a Lockheed-Martin Company, for the US DOE under contract DE-AC-94AL85000