SAE2001 Lin Simulink Hybrid Vehicles

of 13
-
Upload
chandrakant-kulkarni -
Category
Documents
-
view
220 -
download
0
Transcript of SAE2001 Lin Simulink Hybrid Vehicles
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
1/13
1
2001-01-1334
Integrated, Feed-Forward Hybrid Electric VehicleSimulation in SIMULINK and its Use for Power
Management StudiesChan-Chiao Lin, Zoran Filipi, Yongsheng Wang, Loucas Louca,
Huei Peng, Dennis Assanis, Jeffrey Stein
Automotive Research Cente
The University of Michigan
Copyright 2001 Society of Automotive Engineers, Inc.
ABSTRACT
A hybrid electric vehicle simulation tool (HE-VESIM)has been developed at the Automotive Research Centerof the University of Michigan to study the fuel economypotential of hybrid military/civilian trucks. In this paper,the fundamental architecture of the feed-forward parallelhybrid-electric vehicle system is described, together withdynamic equations and basic features of sub-systemmodules. Two vehicle-level power management controlalgorithms are assessed, a rule-based algorithm, which
mainly explores engine efficiency in an intuitive manner,and a dynamic-programming optimization algorithm.Simulation results over the urban driving cycledemonstrate the potential of the selected hybrid systemto significantly improve vehicle fuel economy, theimprovement being greater when the dynamic-programming power management algorithm is applied.
INTRODUCTION
Growing environmental concerns coupled withconcerns about global crude oil supplies stimulateresearch aimed at new, fuel-efficient vehicletechnologies. Hybrid-electric vehicles (HEV) appear to
be one of the most viable technologies with significantpotential to reduce fuel consumption within realisticeconomical, infrastructural and customer acceptanceconstraints. Dozens of prototype/concept hybridvehicles have been developed. Toyota and Honda havealready launched production vehicles and many othermajor automakers are expected to launch hybridvehicles in the next 3-5 years. Due to the existence ofdual power-sources, the additional design degrees offreedom of HEV offer unprecedented possibilities in fueleconomy and exhaust emissions, particularly if parallel
powertrain architectures are employed. At the sametime, the complexity of the new vehicle system requiresthe application of simulations for accurate sizing andmatching studies, as well as for development of controalgorithms well ahead of the final design and physicaprototyping.
Most of the control strategies developed for paralleHEV fall into three categories. The first type appliesintelligent control techniques such as rules/fuzzylogic/NN for estimation as well as control algorithmdevelopment [1 and 2]. The second type of approach is
based on static optimization methods. Commonly, tocalculate the cost of energy, the electric energy istranslated into an equivalent amount of fuel [3 and 4]The optimization scheme then figures out proper energyand/or power split between the two energy sourcesunder steady-state operations. Due to its relativelysimple point-wise optimization nature, it is possible toextend the optimization scheme to solve thesimultaneous fuel economy and emission optimizationproblem [5]. The basic idea of the third type of HEVcontrol algorithm is similar to that of static optimizationhowever, the optimization was performed for dynamicsystems [6]. Further, the optimization is with respect to
a time horizon, rather than for a fixed point in time. Ingeneral, the power split algorithm from the dynamicoptimization will be more accurate under transienconditions. Usually, the dynamic optimization algorithmsare not implementable due to their preview nature andheavy computation requirement. They are, however, agood benchmark based on which the first two types ofalgorithms can be improved or compared against.
The objective of this work is to develop an integratedhybrid vehicle simulation tool and use it for the design o
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
2/13
2
energy management control algorithms. The basis forour Hybrid Vehicle-Engine SIMulation (HE-VESIM) is thehigh-fidelity conventional vehicle simulator VESIMpreviously developed at the University of Michigan [7].VESIM has been validated against measurements for aClass VI truck, and proven to be a very versatile tool formobility, fuel economy and drivability studies. Toconstruct a hybrid-vehicle simulator, some of the mainmodules require modifications, e.g. the engine needs tobe reduced in size/power, and the electric componentmodels need to be created and integrated into thesystem. Our HEV simulation effort will focus on parallelpost-transmission configurations, where the electricmotor is mechanically coupled to the output shaft. Afeed-forward simulation scheme will be employed so asto enable studies of control strategies under realistictransient conditions. The integrated HEV simulation willbe implemented in SIMULINK to allow for easyreconfiguration of the system and to enable the designerto select proper models depending on specific simulationgoals. Two control algorithms are investigated in thispaper: a rule-based and a dynamic programmingoptimization algorithm.
The paper is arranged as follows. The configurationof the newly developed hybrid electric vehicle system inSIMULINK is discussed first, followed by the descriptionof features of the main simulation modules: dieselengine, drivetrain, vehicle dynamics and electriccomponents. Next, two power management algorithms:a rule-based algorithm, and a dynamic programmingbased optimization algorithm are introduced. Thecomplete hybrid vehicle simulation is then used toassess the acceleration ability and the fuel economy ofthe hybrid vehicle through comparisons with itsconventional counterpart. The two control strategies are
evaluated through simulation predictions of fuel
consumption over a driving cycle, followed by thesummary and conclusions.
HYBRID-ELECTRIC VEHICLE SYSTEM
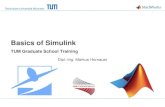
The vehicle system considered in this work is a 4X2Class VI truck configured as a parallel hybrid with theelectric motor positioned after the transmission. Theschematic of the vehicle and the propulsion system isgiven in Figure 1. The engine is connected to the torque
converter (TC), whose output shaft is then coupled to thetransmission (Trns). The coupling at the transmissionoutput side engages or disengages the electric moto
depending on the operation mode of the hybrid. Hence
0
slope
Double Click
to Close All
Load Output Variables
Double Click
to Plot Result
T wheel
Brake
Slope
w wheel
v veh
VEHICLE DYNAMICS
HEVController
Motor commd
w motor
Current
T motor
ELECTRIC MOTOR
cyc_mph
Dring Cycle
Load Input Data
DRIVER
T engine
T motor
Gear
w shaft
clutch comd
w engine
T shaft
w motor
w trans
DRIVELINE
w engine
Engine commandT engine
DIESEL ENGINE
Current soc
BATTERY
Figure 2 Hybrid-electric vehicle simulation in SIMULINK
IMInter
cooler
Air
ExhaustGas
TrnsTC
C
EMT
D
Traction Force
PS
DS
DS
ICM
Vehicle Dynamics
Engine
Drivetrain
Motor
Battery
PowerControlModule
Figure 1: Schematic of the integrated vehicle system.
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
3/13
3
the transmission and/or electric motor can be linked tothe propeller shaft (PS), differential (D) and twodriveshafts (DS), coupling the differential with the drivenwheels.
The complete vehicle system simulation is structuredto directly resemble the layout of the physical system. Inorder to have a high degree of flexibility, the simulationstructure is implemented in the MATLAB/SIMULINKgraphical software environment, as shown in Figure 2.Links between main modules represent the physicalparameters that actually define the interaction betweenthe components, such as shaft torque and angularvelocity, or electrical current and voltage. The HEVcontroller contains the power management logic andsends control signals to the components modules basedon the feedback about current operating conditions.Finally, a driver module allows the feed-forwardsimulation to follow a prescribed vehicle speed schedule.The Intelligent Speed Controller (IVS) fulfills that roleand provides the driver demand signal and brakingbased on the specified speed setting and the currentvehicle speed.
ENGINE
The engine model is derived from the high fidelity,thermodynamic engine system previously developed forthe conventional vehicle [7 and 11]. The high fidelityengine model was comprised of multiple cylindermodules linked with external component modules formanifolds, compressors and turbines, heat exchangers,air filters, and exhaust system elements. In order tosupport the computationally intensive simulations overlong driving cycles and facilitate easy scaling of theengine, the thermodynamic engine model is replaced bya look-up table that provides brake torque as a functionof instantaneous engine speed and mass of fuel injectedper cylinder/cycle. The look-up table is actuallygenerated using a previously validated high fidelityengine system code [11], hence it is possible tophysically vary the size of the engine, or its design, andhave a realistic representation of the effect of a givenchange. For the parallel hybrid application, the originalV8 7.3 L diesel is downsized by reducing the number ofcylinders to 6, and hence the displacement to 5.5 L. Theturbomachinery maps are scaled to match the smallerengine, following the methodology described in [20].The whole procedure for generating torque look-uptables based on predictions of a validated high fidelity
engine system code is illustrated in Figure 3. Thespecifications of both the V8 engine for the conventionalvehicle and the V6 engine for the hybrid application aregiven in Table 1 of the Appendix.
In order to retain features of the engine systemcritical for the transient response, the complete fuelcontrol logic is retained in the look-up table basedmodel, as shown in Figure 4. The diesel engine fuelinjection controller provides the signal for the mass offuel injected per cycle based on driver demand, supplied
by the IVS (driver) module, environmental conditions andcurrent engine operating conditions, i.e. engine speedand boost pressure. The instantaneous engine speed isprovided as the output of the engine dynamics block(Figure 4), while the nominal value of boost pressure istabulated as the function of speed and load based onpredictions of the high fidelity code. Hence, the part ofthe fuel control logic that limits the fuel at low boost isretained in a meaningful way. In addition, a carefullycalibrated time delay is built-in to represent the effect ofturbo-lag on transient response to rapid increases oengine rack positions. More details about the enginesubsystem and the fuel controller are provided in thework by Assanis et al. [7].
IM
InterCooler
C
EM
T
2
4
6
8
x 10-5
0
1000
2000
3000
0
200
400
600
800
RUN HIGH FIDELITYSIMULATION USING NEW
INPUT DATA
TORQUE LOOK-UP TABLEFOR THE SCALED ENGINE
BASELINE DESIGN
SCALE ENGINE GEOMETRYAND TURBOMACHINERY
Figure 3: Generating a torque map for a scaled engine
1
EngineSpeed
brake torque
Load Torque
rpm
engine dynamics
Rack
rpmmdot_fuel
Fuel controller/Governor
Brake Torque
2
Drivercommand
1
Load Torque
Figure 4: Engine subsystem in SIMULINK
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
4/13
4
DRIVETRAIN
The driveline module consists of the torqueconverter, transmission, propshafts, differential, anddrive shafts. It provides the connection between theengine, the electric motor and the vehicle dynamicsmodule (see Figure 1). The torque converter input shaftconnects to the engine flywheel. On the other end, thetransmission-out shaft and/or the electric motor shaft are
connected to the propeller shaft, the differential and, viadriveshafts, to the wheels. Hence, the connectionbetween the driveline and the vehicle dynamics modeloccurs at the wheel. The drivetrain model is constructedusing the bond graph modeling language [12 and 13]and implemented in the 20SIM system-modelingenvironment [14]. The bond graph language is selecteddue to its capability of effortless generation of modelswith different complexity [15]. The detailed developmentof the drivetrain model is described in [16]; its keyparameter values are given in Table 2 of the Appendix.
The dynamic behavior of the drivetrain is
represented by ordinary differential equations thatdescribe the kinematic and dynamic behavior of the realsystem. These equations are automatically generatedby 20SIM as standard C code. They are then convertedinto a C-MEX function. Hence, the final product is an S-function suitable for direct integration with the SIMULINKmodel.
VEHICLE DYNAMICS
The vehicle subsystem includes the wheels/tires,axles, suspensions and body of the vehicle. A numberof approaches can be used to model vehicle dynamicsdepending on the overall simulation objectives. A single
Degree of Freedom (DOF), point mass model, can beselected for an initial estimate of vehicle performance asdifferent powertrain options are explored. The modelcomplexity can be enhanced with more DOFs as moresevere excitations (road roughness, steering, braking,etc.) are introduced into the model. This is necessary forthe investigation of vehicle-powertrain interactions duringsuch extreme transients that induce significant pitchmotion. The complexity of the model can besystematically adjusted, as proposed by Louca et.al.[15], to accommodate the needs of a specificscenario.
Longitudinal
Wheel Inertia
Total Vehicle Mass
Heave
RoadExcitation
Tire
SprungMass
UnsprungMass
Suspension
Drive Torque
Figure 5: Schematic of vehicle dynamics.
The studies in this work consider only theacceleration of the vehicle on a smooth road where theexcitation does not generate significant pitch motionTherefore, for this mild scenario, the enhanced pointmass model, shown in Figure 5, adequately predicts theinteractions between the powertrain and vehicledynamics. The model is composed of two componentsthat describe the dynamic behavior of the vehicle in thelongitudinal and heave directions. The two componentsare coupled through the road/tire interaction. Thedevelopment of the vehicle dynamics model is given in[16] and its key parameter values are given in Table 3 ofthe Appendix. The vehicle dynamics are also modeledusing the bond graph language within the 20SIMenvironment. The dynamic equations are finallyconverted into a C-MEX function using the sameprocedure as in the drivetrain module.
ELECTRIC SUB-SYSTEMS
Two sub-systems were added to the electric path: aDC motor, and a lead-acid battery. Their characteristicsare described in the following.
DC-MOTOR/GENERATOR - Because the engine ofthe conventional truck is roughly 210 KW and the enginefor the hybrid is downsized to about 157 KW (8 cylindersreduced to 6 cylinders), a 49 KW permanent magnet DCmotor is selected. The efficiency/loss data, obtainedfrom the Advisor program [9], have the form
),( mmm Tf = (see Figure 6). In other words, the
efficiency of the motor is a function of motor torque andmotor speed. The motor dynamics are approximated bya first-order lag. However, due to the battery power andmotor torque limit, the final motor dynamics assume thefollowing form:
Positive Motor Torque:
( )_ _ max _min , ,m
m m request m m bat
m
T T T T s
=
+(1)
Negative Motor Torque:
( )_ _ max _max , ,m
m m request m m bat
m
T T T T s
=
+(2)
where _m requestT is the requested motor torque, _ maxmT is
the maximum torque the motor can generate unde
current motor speed, _m bat T is the maximum moto
torque due to battery constraint, mT is the calculated
motor torque, and m characterizes the motor dynamicsand is the inverse of the motor time constant. The loadcurrent for the battery (to be presented below) can thenbe calculated from the following equation:
0if
0if
>
,ch tot reqFlag False P P= =
(A) Normal Mode (If chFlag False= and 0reqP > )
IF _tot e onP P
0 ,e m tot P P P= =
IF _ _e on tot m aP P P<
, 0e tot mP P P= =
IF _ _ _ maxm a tot m a mP P P P< +
_ _,e m a m tot m aP P P P P= =
IF _ _ maxtot m a mP P P> +
_ max _ max,e tot m m mP P P P P= =
(B) Charging Mode (If chFlag True= and 0reqP > )
IF _tot e onP P
0 ,e m reqP P P= =
IF _ _ maxe on tot eP P P<
,e tot m chP P P P= =
IF _ maxtot eP P>
_ max _ max,e e m req eP P P P P= =
(C) Braking Mode (IF 0reqP < )
IF _ minreq mP P
b0 , , 0e m reqP P P P= = =
IF _ minreq mP P<
_ min _ min0 , ,e m m b req mP P P P P P= = =
It should be noted that because it is nostraightforward to figure out whether and how the
transmission should be shifted in a different manne(from the original shift map designed for the larger, 7.3L8-cylinder engine), we decided to use the same shiflogic in the rule-based algorithm.
DYNAMIC PROGRAMMING BASED ALGORITHM -As opposed to the rule-based algorithm, the dynamicprogramming, or similar optimization algorithms, usuallyrely on a model to compute the best control strategyThe model can be either analytical or numerical; in othewords, it can work with numerical black boxes such asHE-VESIM. In the discrete-time format, the model could
have the form ( 1) ( ( ), ( ))x k f x k u k+ = . And the goal o
the optimization scheme is to minimize a cost functionIn this paper, the cost function is assumed to consist oonly fuel consumption rate. In the future, when propeemission models are included, the simultaneous fueeconomy-emission optimization problem can be solvedThe cost function we used has the following form:
(kg)))L(x(k),u(kfuelJN
k
=
==1
0
(4)
where in this paper the only term included in the Lfunction is the instantaneous fuel consumption rate. The
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
7/13
7
optimization problem is solved under proper inequalityconstraints to ensure that the engine speed, SOC, fuelconsumption and motor torque are all within theircorresponding bounds. Also, equality constraints areimposed so that the vehicle always follows the specifieddriving cycle speed, as well as the accelerationprescribed by the driving cycle. To acceleratecomputations, pre-computed tables are constructed forgrid points for all possible states and control signals.The detailed procedures of the look-up-table baseddynamic programming algorithm have been reported in[19] and thus are not repeated here.
It should be noted that a simplified model (with only2 state variables, SOC and gear number) of the HE-VESIM was generated for the dynamic programmingalgorithm, because the computation time becomesunacceptably long for higher order systems. After theoptimal control strategy is found, we then apply thecontrol signals to the original HE-VESIM model (seeFigure 2) to ensure that the performance number isobtained from the same (complex) model.
INTEGRATION AND VALIDATIONThe hybrid vehicle system simulation (HE-VESIM)
consists of five main modules: engine, driveline, electricmotor, battery, and vehicle structure. The interactionbetween the propulsion modules is in the form of activeand resistive torques, as well as shaft angular speeds.The simulation is configured in a feed-forward manner,where everything starts with the driver action and thepedal position signal being sent to the injection systemcontroller. The engine simulation provides as outputs theinstantaneous value of engine torque and the rotationalspeed. The torque undergoes multiple transformationsas it is transmitted through the torque converter and the
transmission. The final value at the wheel depends onthe operating mode, i.e. transmission gear ratio and thecontribution of the electric motor/generator, as well as onflexing of the propeller and drive shafts. The torque onthe wheels is converted into tractive forces, which inconjunction with other information about the vehicle andthe terrain determines vehicle dynamic behavior.Hence, the vehicle dynamics module returns theinstantaneous vehicle speed and the wheel angularvelocity. This information is propagated back throughthe system, all the way to the TC output shaft, thusdetermining the torque converter turbine speed and thespeed ratio of the TC. The latter determines the TC
pump torque, which is in turn supplied to the enginemodule as resistive torque. The solution of the enginedynamic equations determines the engine speed valuefor the next integration step.
The integration of these dynamic modules isperformed in the SIMULINK environment. Its graphicalprogramming capabilities allow easy coupling of themodules, as long as each one of them has a desired setof input/output links. However it was known (e.g., [17])that the flexibility of SIMULINK comes with a certainoverhead in terms of computational efficiency, the actual
magnitude being strongly dependent on the level osystem decomposition and the number of componentmodules and links. In order to enhance computationaefficiency, some of the more complex modules areprogrammed in C (drivetrain, vehicle dynamics), andconfigured as self-contained SIMULINK blocks using theMEX function standard.
Prior to the studies of the hybrid-electric system, thesimulation of the conventional Class VI truck was
validated through comparisons of VESIM predictionswith measurements obtained on a real vehicle onInternationals proving grounds [7]. The comparison ocalculated results and measurements for twoacceleration tests (0 to 60 mph and 30 to 50 mph)demonstrated very good agreement [7], hence it wasconcluded that the simulation could be used for furthestudies of configurations derived from the original one.
SIMULATION RESULTS
The vehicle studied is the International 4700 seriesThe diesel engine is downsized from the V8 (7.3L) to aV6 and a 49 KW electric motor is selected to assist the
internal combustion engine. The transmission gearatios are matched according to the demands of thenewly-configured parallel hybrid powertrain with thepost-transmission motor location. Total vehicle mass is7258 kg. Basic engine, drivetrain and vehiclespecifications are given in the Appendix. Theperformance of the hybrid vehicle during launch andhard acceleration from 0 to 60 mph is assessed firstThen the virtual hybrid electric truck with the powermanagement controller is tested through simulation overthe Federal Urban Driving Schedule in order to evaluateits potential for fuel economy improvement.
ACCELERATION 0-60 mph The 0 to 60 mphacceleration test was simulated in order to verify that theparallel hybrid with the downsized engine retains thesame acceleration performance as the conventionabaseline vehicle. The comparison of vehicle speedprofiles is shown in Figure 10. The hybrid achieved 60mph slightly earlier than the conventional truck, primarilydue to better performance immediately after launchreveals more details about the system response duringthis rapid transient. A favorably high value of mototorque at very low speeds (see Figure 11b)compensates for the slower response of the dieseengine due to turbo lag (see Figure 11c), hence the
combined value results in a higher acceleration atlaunch. Since the driver power demand is 100%, themotor continuously operates at its highest availabletorque to assist the engine until the desired speed isachieved. Figure 11a illustrates the cumulative fueconsumption of the conventional truck and the hybridelectric vehicle during the acceleration run. Obviouslythe downsized engine consumes significantly less fuelwhile it should be kept in mind that part of the energycomes from the battery.
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
8/13
8
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
Time (sec)
V
ehicleSpeed(MPH)
H-VESIM
VESIM
Figure 10: Speed profile comparison of conventional vs.hybrid truck during 0-60 mph acceleration
FUEL ECONOMY OVER A DRIVING CYCLE TheFederal Urban Driving Schedule (FUDS, see Figure 12)was used to evaluate the fuel economy of the delivery
truck studied in this work. Once the speed profile of thedriving cycle is specified, the corresponding torque at thetires necessary to follow the speed profile is calculated(Figure 12) and used as the desired output for both therule-based and the optimal algorithms. It is interesting to
examine more closely how one of the control algorithmse.g. the rule-based controller, switches between differenmodes of hybrid operation during a driving scheduleFor that purpose, a close-up of the 430 to 540 secondperiod of the driving cycle is given in Figure 13. Thissegment of the cycle includes two accelerationcruisingdeceleration profiles (see Figure 13a), the first onerequiring harder acceleration to higher speed. Thebattery SOC, engine power and electric motor power aregiven in Figures 13b, c and d, respectively. The trucklaunches from stop using only the motor to avoidinefficient engine operation under low power demandsHowever, the engine is turned on very quickly, since thepower demand requires the output from both the engineand the electric motor. From 450 to 477 sec, the powerequired to cruise at the speed of 35 mph is less than theengine on power level, hence the engine is disengagedand the motor supplies all the torque required at thewheels. When the truck decelerates, the regenerativebraking is applied; hence the motor operates as agenerator to recover the energy that would otherwise bedissipated in brakes (477 to 490 sec and 530 to 537 secinterval). It should be noted that when the battery SOC
hits the lower bound (55%), at 523 seconds into theschedule, the engine is immediately turned on to powethe truck, as well as to recharge the battery. Hence, theelectric motor is switched to the generator mode and itstorque becomes negative.
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
FuelConsumpation(kg)
(a) HE-VESIM
VESIM
0 5 10 15 20 25 30 35 40 45 500
200
400
Torque(N-m)
(b)
HE-VESIM - Engine
HE-VESIM - Motor
0 5 10 15 20 25 30 35 40 45 500
1000
2000
3000
Time (sec)
EngineSpeed(rpm)
HE-VESIM
(c)
Figure11: Critical system variables during 0-60 mph acceleration: conventional truck (VESIM) vs. the hybrid electric truck(HE-VESIM)
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
9/13
9
Furthermore, a close-up examination of the behaviorof two vehicles with different control algorithm between690 to 765 second of the driving cycle is given in Figure14. The behaviors of the two vehicles underdeceleration (from 714 to 726 sec, and 749 to 763 sec)
are identical. This is not surprising since the brakingstrategies of the two algorithms are identical. Besidesboth algorithms use the motor during launch to avoidinefficient engine operation. Since the rule-basedalgorithm is in the charging mode within this time period
0 200 400 600 800 1000 1200-5000
0
5000
Torque(N-m)
0 200 400 600 800 1000 1200-20
0
20
40
60
80
Speed(rad/s)
Time (sec)
Figure 12: Federal Urban Driving Schedule (FUDS
430 450 470 490 510 5300
20
40
VehicleSpeed(MPH)
FUDS
HE-VESIM
430 450 470 490 510 5300.55
0.57
0.59
0.61
BatterySOC
430 450 470 490 510 5300
40
80
12 0
Enginepower(kW)
430 450 470 490 510 530-50
0
50
Time (sec)
Motorpower(kW)
(a)
(b)
(c)
(d)
Figure 13: The close-up of the 430 540 second interval during the urban driving cycle: a) vehicle speed; b) batterystate of charge; c) diesel engine power; and d) electric motor power.
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
10/13
10
the battery needs to be recharged whenever the powerrequest is beyond the engine on power level until the
battery SOC reaches the maxSOC (60%). Battery recharge
occurs between 698 to 714 sec, and 728 to 740 sec.Hence, the engine for the rule-based algorithm worksharder than that of the dynamic-programming case in
order to provide additional constant power chP to
recharge the battery. The fuel economy could suffer. Onthe contrary, since the dynamic programming optimizes
the process over the whole driving cycle, a betterdischarging/charging schedule has been deployed.
The fuel economy results over the complete urbandriving schedule, obtained for the two control algorithmsare compared with a conventional diesel engine truck inTable 1. These results are obtained for the chargesustaining strategy, with the SOC at the end of the cyclebeing the same as it was at the beginning. It can beseen that the fuel economy improvement (over theconventional truck) is about 22% for the rule-basedalgorithm and 33% for the dynamic-programmingalgorithm. For the case of rule-based algorithm, a largeportion of its improvement is due to regenerative braking.
Further improvement was obtained by dynamicprogramming through better-orchestrated coordinationbetween the operation of engine/transmission andmotor/battery. Figure 15 shows engine operating pointson the BSFC map calculated during the driving schedule
for all three vehicle configurations (conventional, HEV-rule based and HEV-dynamic programming). Theposition of the largest clusters of points on both HEVmaps is much more favorable compared to theconventional vehicle, i.e. the engine is forced to operateat relatively higher loads and points are moved closer tothe high efficiency region. Closer examination of themaps obtained for the two HEV versions indicates thatthe rule-based algorithm has achieved a more consistenengine operation near the island of optimum efficiencybut quite a few points are located on the maximumtorque line. The dynamic programming algorithmproduces higher overall fuel economy by exploring theefficiency of the whole system, instead of focusing juson the engine efficiency. In other words, it appears thain some instances it is more effective to sacrifice some ofthe engine efficiency and gain on other fronts, throughmore efficient motor operation and better-optimizedcharging/discharging schedule. This observation iscurrently being analyzed in more detail in order to devisean improved rule-based algorithm for the HE-VESIM.
Table 1 Fuel consumption comparison: conventional, dynamic
programming (DP), rule-based (RB)DP RB Conventional
MPG 13.85 12.65 10.39
Fuel (Gallon) 0.5259 0.5757 0.7005
690 700 710 720 730 740 750 7600
20
40
VehSpeed(MPH)
DP
RB
690 700 710 720 730 740 750 760
0.58
0.6
BatterySOC
690 700 710 720 730 740 750 760-200
0
200
Time (sec)
MotTrq
(Nm)
690 700 710 720 730 740 750 7600
500
EngTrq(Nm)
DP
RB
(a)
(b)
(c)
(d)
Figure 14: The close-up of the 690 765 second interval during the urban driving cycle: comparison between theDynamic Programming (DP) and Rule based (RB) control.
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
11/13
11
SUMMARY AND CONCLUSIONS
This paper presents the development of a feed-forward, parallel, hybrid electric vehicle systemsimulator, and its use for evaluation of powermanagement strategies aimed at maximizing fueleconomy. The simulator is based on a previouslyvalidated simulator of conventional engine-vehiclesystems that includes modules of the diesel engine,driveline and vehicle dynamics of the appropriate fidelity.The electric components are integrated in the system in
the SIMULINK programming environment so that theelectric motor/generator is located after the transmissionand linked to the output shaft via an electro-mechanicacoupling. The diesel engine is downsized since theelectric motor is able to provide assistance during thehigh power demand operation. Two power managemenalgorithms were analyzed in this papera dynamicprogramming algorithm and a rule-based algorithm. Inboth cases the strategy aims at sustaining the batterystate of charge.
The acceleration performance of the HEV Class Vtruck was shown to be comparable to the conventionatruck. The favorable torque characteristic of the electricmotor compensates for the delay in the diesel engineresponse caused by turbo lag. Simulation of the vehicleover a complete urban driving cycle showed that the fueeconomy could be improved by 20-30% over traditiona(non-hybrid) trucks. It was found that the dynamicprogramming algorithm achieves higher overall fueeconomy despite the fact that its engine may oftenoperate in a less efficient region than the one controlledby the rule-based algorithm. This fact illustrates the
importance of coordinating multiple inputs, which maynot be captured by simple engineering intuition. In othewords, in some instances it was more effective tosacrifice some of the engine efficiency, and benefithrough more efficient motor operation and optimizedcharging/discharging schedule, for an overall bettecompromise.
ACKNOWLEDGMENTS
The authors would like to acknowledge the technicaand financial support of the Automotive Research Cente(ARC) by the National Automotive Center (NAC) locatedwithin the US Army Tank-Automotive ResearchDevelopment and Engineering Center (TARDEC). The
ARC is a U.S. Army Center of Excellence for AutomotiveResearch at the University of Michigan, currently inpartnership with University of Alaska-FairbanksClemson University, University of Iowa, OaklandUniversity, University of Tennessee, Wayne StateUniversity, and University of Wisconsin-Madison. Thedynamic programming scheme contributions by JungmoKang and Jessy Grizzle of the EECS department of TheUniversity of Michigan are also gratefully acknowledged.
REFERENCES
1. Baumann, Bernd M.; Washington, G.; GlennBradley C.; Rizzoni, G., Mechatronic design andcontrol of hybrid electric vehicles, IEEE/ASMETransactions on Mechatronics, v5 n 1 2000. p 58-722000
2. Farrall, S. D. and Jones, R. P., Energymanagement in an automotive electric/hear enginehybrid powertrain using fuzzy decision making.Proceedings of the 1993 International Symposiumon Intelligent Control, Chicago, IL, 1993.
800 1000 1200 1400 1600 1800 2000 2200 2400
100
200
300
400
500
600
700
Engine speed (rpm)
Enginetorque(Nm)
Fuel Consumption (kg/kWhr)
0.
212
0.2
14
0.214
0.214
0.
216
0.21
6
0.216
0.216
0.22
0.22
0.22 0.22
0.22
0.23
0.23
0.23
0.23
0.230.23
0.24
0.24
0.24 0.24
0.24
0.24
0.25
0.25
0.25 0.25
0.25
0.26
0.26
0.26 0.26
0.26
0.27
0.27
0.270.27
0.27
10000
1000010000
0000
30000
30000
30000
0000
50000
50000
50000
70000
70000
70000
90000
90000
90000
110000
110000
a)
800 1000 1200 1400 1600 1800 2000 2200 2400
50
100
150
200
250
300
350
400
450
500
Engine speed (rpm)
Enginetorque(Nm)
Fuel Consumption (kg/kWhr)
0.2
12
0.2
14
0.214
0.214
0.
216
0.21
6
0.216
0.2
16
0.22
0.22
0.22
0.22
0.22
0.23
0.23
0.2
3
0.23
0.230.23
0.24
0.24
0.24 0.24
0.24
0.24
0.25
0.25
0.25
0.25
0.25
0.26
0.26
0.26 0.26
0.26
0.27
0.27
0.27 0.27
0.27
10000
1000010000
30000
30000
30000
30000
50000
50000
50000
70000
70000
70000
90000
90000
110000
b)
800 1000 1200 1400 1600 1800 2000 2200 2400
50
100
150
200
250
300
350
400
450
500
Engine Speed (rpm)
EngineTorque(Nm) 0
.212
0.2
14
0.214
0.214
0.
216
0.216
0.216
0.2
16
0.22
0.22
0.22
0.22
0.22
0.23
0.23
0.
23
0.23
0.230.23
0.24
0.24
0.24 0.24
0.24
0.24
0.25
0.25
0.25 0.25
0.25
0.26
0.26
0.26 0.26
0.26
0.27
0.27
0.27 0.27
0.27
c)
Figure 15: Engine operation comparison over adriving cycle: a) conventional truck; b) hybrid,
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
12/13
12
3. Kim, C., NamGoong, E., and Lee, S., Fuel EconomyOptimization for Parallel Hybrid Vehicles with CVT.SAE Paper No. 1999-01-1148.
4. Paganelli, G., Ercole, G., Brahma, A., Guezennec,Y. and Rizzoni, G., A General Formulation for theInstantaneous Control of the Power Split in Charge-Sustaining Hybrid Electric Vehicles. Proceedings of
AVEC 2000, 5th Intl Symposium on AdvancedVehicle Control, Ann Arbor, MI, 2000.
5. Johnson, V.H., Wipke, K.B. and Rausen, D.J., HEVControl Strategy for Real-Time Optimization of FuelEconomy and Emissions, Proceedings of the FutureCar Congress, April 2000, SAE paper#2000-01-1543.
6. Brahma, A., Guezennec, Y. and Rizzoni, G.,Dynamic Optimization of Mechanical/ElectricalPower Flow in Parallel Hybrid Electric VehiclesProceedings of AVEC 2000, 5th Intl Symposium on
Advanced Vehicle Control, Ann Arbor, MI, 2000.
7. Assanis, D.N., Z.S. Filipi, S. Gravante, D. Grohnke,X. Gui, L.S. Louca, G.D. Rideout, J.L. Stein, Y.
Wang, 2000. Validation and Use of SIMULINKIntegrated, High Fidelity, Engine-In-VehicleSimulation of the International Class VI Truck. SAEPaper 2000-01-0288, SAE 2000 World Congress.
8. Powell, B.K. and Pilutti, T.E., A Range ExtenderHybrid Electric Vehicle Dynamic Model,Proceedings of the 33
rdIEEE Conference on
Decision and Control, Lake Buena Vista, FL,December 1994.
9. Burch, Steve, Cuddy, Matt, et. al., ADVISOR 2.1Documentation, National Renewable EnergyLaboratory, March 1999.
10. Bowles, P. D., Modeling and Energy Managementfor a Parallel Hybrid Electric Vehicle (PHEV) withContinuously Variable Transmission (CVT), MSthesis, University of Michigan, Ann Arbor, MI, 1999.
11. Assanis D.N., and Heywood J.B., Development andUse of a Computer Simulation of theTurbocompounded Diesel System for EnginePerformance and Component Heat TransferStudies, SAE Paper 860329, 1986.
12. Karnopp, D. C., Margolis, D. L., and Rosenberg,R. C., System Dynamics: A Unified Approach.Wiley-Interscience, New York, New York, 1990.
13. Rosenberg, R. C., and Karnopp, D. C., Introductionto Physical System Dynamics. McGraw-Hill, NewYork, New York, 1983
14. 20SIM, 20SIM Pro Users Manual. The University ofTwente - Controllab Products B.V. Enschede, TheNetherlands, 1999
15. Louca, L. S., Stein, J. L., Hulbert, G. M., A PhysicalBased Model Reduction Metric with an Application toVehicle Dynamics. The 4th IFAC Nonlinear ControSystems Design Symposium (NOLCOS 98)Enschede, The Netherlands, 1998.
16. Louca, L.S., J.L. Stein and D.G. Rideout, 2001Generating Proper Integrated Dynamic Models foVehicle Mobility Using a Bond Graph FormulationProceedings of the 2001 International Conference
on Bond Graph Modeling, January, Phoenix, AZPublished by the Society for Computer Simulation.
17. Liu, H., Chalhoub, N. G., Henein, N., Simulation of aSingle Cylinder Diesel Engine Under Cold StartConditions Using SIMULINK, Proceedings o
ASME-ICE Spring Technical Conference, Vol. 28-1Fort Collins, CO, April 27-30, 1997.
18. Wiegman, H. L. N., Vandenput, A. J. A., "BatteryState Control Techniques for Charge Sustaining
Applications, SAE Paper 981129, 1998.
19. Jun-Mo Kang, Ilya Kolmanovsky and J.W. GrizzleApproximate Dynamic Programming Solutions fo
Lean Burn Engine Aftertreatment, Proceeding of theIEEE Conference on Decision and Control, Phoenix
AZ, December 7-10, 1999.
20. Assanis D., Delagrammatikas, G, Fellini, R., FilipiZ., Liedtke, J., Michelena, N., Papalambros, P.Reyes, D., Rosenbaum, D., Sales, A., SasenaM.,An Optimization Approach to Hybrid ElectricPropulsion System Design, Mechanics of Structuresand Machines, Volume 27, No. 4, 1999, pp. 393 421
APENDIX
-
8/2/2019 SAE2001 Lin Simulink Hybrid Vehicles
13/13
13
Table 1: DI Diesel Engine Specification
CONVENTIONAL HYBRID
Configuration V8, Turbocharged,
Intercooled
V6, Turbocharged,
Intercooled
Displacement [L] 7.3 5.475
Bore [cm] 10.44 10.44
Stroke [cm] 10.62 10.62
Con. Rod Length [cm] 18.11 18.11
Compression Ratio [-] 17.4 17.4
Rated Power [HP] 210 @ 2400 rpm 157 @ 2400 rpm
Table 2: Drivetrain Specifications
Torque converter - Turbine inertia [kg*m2] 0.068
Transmission - 1st gear churning losses coeff. R11 0.0192
Transmission - 2nd gear churning losses coeff. R12 0.015
Transmission - 3rd gear churning losses coeff.R13 0.031
Transmission - 4th gear churning losses coeff.R14 0.0367
Transmission - 1st gear churning losses coeff.R21 1.361 10-5
Transmission - 2nd gear churning losses coeff.R22 5.719 10-6
Transmission - 3rd gear churning losses coeff.R23 -3.189 10-5
Transmission - 4th gear churning losses coeff.R24 -4.177 10-5
Transmission - 1st gear ratio [-] 3.45
Transmission - 2nd gear ratio [-] 2.24Transmission - 3rd gear ratio [-] 1.41
Transmission - 4th gear ratio [-] 1.00
Transmission - 1st gear ratio [-] FOR HYBRID 2.59
Transmission - 2nd gear ratio [-] FOR HYBRID 1.68
Transmission - 3rd gear ratio [-] FOR HYBRID 1.06
Transmission - 4th gear ratio [-] FOR HYBRID 0.75
Transmission - Fluid charging pump loss [N*m] -6.12
Transmission - 1st Gear efficiency [-] 0.9893
Transmission - 2nd Gear efficiency [-] 0.966
Transmission - 3rd Gear efficiency [-] 0.9957
Transmission - 4th Gear efficiency [-] 1.0
Propshafts/Differential - Axle churning loss coeff.R0 8.34
Propshafts/Differential - Axle churning loss coeff.R1 0.04087Propshafts/Differential - Differential drive ratio [-] 3.21
Propshafts/Differential - Differential efficiency [-] 0.96
Table 3: Vehicle Dynamics Specifications
CG location from front axle [-] 0.61875
Sprung mass [kg] 6581.6
Unsprung mass rear [kg] 430.9
Unsprung mass front [kg] 244.9
Longitudinal - Wheel inertia [kg*m2] 18.755
Longitudinal Break viscous damping [N*m*s/rad] 100.0
Longitudinal Break coulomb damping [N*m] 0.0
Longitudinal - Wheel radius [m] 0.4131
Longitudinal - Tire pressure [psi] 115.0Longitudinal - Number of tires on rear axle [-] 4.0
Longitudinal - Wheel bearing damping [N*m*s/rad] 3.0
Longitudinal - Road/tire friction coefficient [-] 0.7
Longitudinal- Aerodynamic drag = 0.5*Cd**Area 2.081
Vertical - Rear suspension compliance [m/N] 6.34461 10-7
Vertical - Rear tire compliance [m/N] 2.97403 10-7
Vertical - Rear suspension damping [N*s/m] 7000.0
Vertical - Rear tire damping [N*s/m] 2000.0