
Rubbery logic gates - tu-dresden.de · Rubbery logic gates Katherine E. Wilson a,, E.-F. Markus...
9
Accepted Manuscript Rubbery logic gates Katherine E. Wilson, E.-F. Markus Henke, Geoffrey A. Slipher, Iain A. Anderson PII: S2352-4316(16)30133-X DOI: http://dx.doi.org/10.1016/j.eml.2016.07.001 Reference: EML 195 To appear in: Extreme Mechanics Letters Received date: 7 June 2016 Revised date: 4 July 2016 Accepted date: 4 July 2016 Please cite this article as: K.E. Wilson, E.-F.M. Henke, G.A. Slipher, I.A. Anderson, Rubbery logic gates, Extreme Mechanics Letters (2016), http://dx.doi.org/10.1016/j.eml.2016.07.001 This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
Transcript of Rubbery logic gates - tu-dresden.de · Rubbery logic gates Katherine E. Wilson a,, E.-F. Markus...
Accepted Manuscript
Rubbery logic gates
Katherine E. Wilson, E.-F. Markus Henke, Geoffrey A. Slipher, Iain A.Anderson
PII: S2352-4316(16)30133-XDOI: http://dx.doi.org/10.1016/j.eml.2016.07.001Reference: EML 195
To appear in: Extreme Mechanics Letters
Received date: 7 June 2016Revised date: 4 July 2016Accepted date: 4 July 2016
Please cite this article as: K.E. Wilson, E.-F.M. Henke, G.A. Slipher, I.A. Anderson, Rubberylogic gates, Extreme Mechanics Letters (2016), http://dx.doi.org/10.1016/j.eml.2016.07.001
This is a PDF file of an unedited manuscript that has been accepted for publication. As aservice to our customers we are providing this early version of the manuscript. The manuscriptwill undergo copyediting, typesetting, and review of the resulting proof before it is published inits final form. Please note that during the production process errors may be discovered whichcould affect the content, and all legal disclaimers that apply to the journal pertain.

Rubbery logic gates
Katherine E. Wilsona,∗, E.-F. Markus Henkea, Geoffrey A. Slipherb, Iain A. Andersona,∗
aBiomimetics Laboratory, Auckland Bioengineering Institute, The University of Auckland, Level 6, 70 Symonds Street, Auckland 1010, New ZealandbU.S. Army Research Laboratory, 2800 Powder Mill Road, Adelphi, Maryland 20783, USA
Abstract
Dielectric elastomer actuators (DEAs) that possess muscle-like characteristics have received a lot of attention in areas like soft
robotics. Traditionally, electronic control for dielectric elastomer (DE) artificial muscles was achieved with rigid external circuitry.
Recently, however, a flexible piezoresistive electrode, the dielectric elastomer switch (DES), was introduced that can operate high
voltage DEA switching and control. It has been demonstrated that DESs can control charge in high voltage analogue and digital
circuitry. In this contribution, we demonstrate high voltage operation of the seven basic Boolean logic gates using mechanosensitive
DESs. Logic elements made with DESs may provide signal processing capabilities in DE artificial muscles.
Keywords: Artificial muscles, Dielectric elastomer actuators, Dielectric elastomer switches, Logic gates
1. Introduction
Logic devices typically rely on electronics for the gating
mechanism. For instance, common integrated-circuit NAND
gates consist of multiple MOSFETs or several bipolar transis-
tors, diodes, and resistors [1, 2]. These components are mounted
on a rigid board. Here we present a means for logic gating
that is materially softer than the elements of a printed circuit
board and that relies on mechanical strain. The technology
is based on dielectric elastomer actuators (DEAs) coupled to
piezoresistive-charge gates.
A DEA is formed from a dielectric elastomer (DE) mem-
brane, a type of electroactive polymer (EAP), sandwiched be-
tween two compliant electrodes. Actuation occurs when volt-
age is applied to the electrodes, generating electrostatic forces
known as Maxwell pressure [3–5]. The resultant deformation
in the DE membrane is a coupled compression in thickness
and expansion in planar area. The elasticity of the membrane
allows it to revert to its original dimensions when the volt-
age is removed. Voltage-induced deformation of DE materials
∗Corresponding authors.Email addresses: [email protected] (Katherine E.
Wilson), [email protected] (Iain A. Anderson)
has been continually increasing since early works demonstrated
over 100% areal strains, with the record currently at 2200%
areal strain [4, 6–8].
DEAs have characteristics comparable to those of biologi-
cal muscles, including strain-actuation, pressure, power density,
and work-per-cycle performance [9]. These properties, particu-
larly the ability to generate large strains, make DEAs a favored
actuator technology for use as artificial muscles [10, 11].
In 2010, O’Brien et al. demonstrated the dielectric elas-
tomer switch (DES) [12], which is a flexible piezoresistive elec-
trode that can be coupled with DEAs to control charge over the
actuators. DESs are composed of conductive particles dispersed
in a non-conductive matrix [12, 13], therefore DESs function
via the percolation effect [14, 15]. When compressed beyond
the percolation threshold, a DES will undergo orders of mag-
nitdue change in resistance [12, 16]. Thus, the in-plane expan-
sion of a DEA can be exploited to exert force over a switch and
the changing resistance of the switch can be used to control the
charge over a DEA.
Automatic charge control of DE artificial muscles using DESs
has been demonstrated in oscillators [13, 17], a dielectric elas-
tomer generator [18], and a self-commutating rotory motor [19].
Preprint submitted to Extreme Mechanics Letters July 4, 2016

DESs were also used in the production of a Turing machine
[20] that performed calculations based on digital logic. DESs
directly couple mechanics with digital logic [12], which is a key
distinction of DESs relative to other flexible electrodes [21–
23]. These developments support further exploration of logic
devices using DE artificial muscles and switches.
In this contribution, we demonstrate the construction and
operation of soft digital logic elements, the seven basic Boolean
logic gates, using high voltage electromechanical dielectric elas-
tomer switching. The seven basic Boolean logic gates include
NOT (inverter), NAND, AND, NOR, OR, exclusive-NOR (X-
NOR), and exclusive-OR (XOR) gates [1, 2, 24]. The truth
tables for these logic operators having two inputs are shown in
Table 1. The inverter has only one input and one output: when
the input is logical 1 the output is logical 0, and when the input
is logical 0 the output is logical 1 [1, 2, 24].
Table 1
Truth tables for 2-input Boolean logic gates [1, 2, 24].
Inputs Outputs
V 1 V 2 NAND AND NOR OR XNOR XOR
0 0 1 0 1 0 1 0
0 1 1 0 0 1 0 1
1 0 1 0 0 1 0 1
1 1 0 1 0 1 1 0
Boolean logic gates are building blocks for combinatorial
logic circuits. Thus, combinations of gate structures can create
various logical functions, which can be fitted to a broad range of
applications. Soft logic gates made up of pliable materials may
be integrated with artificial muscle devices to provide local sig-
nal processing and reduce the need for bulky external circuitry.
2. Materials and Methods
DEAs are 362% equibiaxially pre-strained VHB 4905 (3M,
USA) and electrodes are painted-on Nyogel 756G (Nye Lu-
bricants, USA). The switching compound is an approximately
5:1 by weight mixture of non-conductive Molykote 44 Medium
grease to conductive Cabot Vulcan XC72 carbon black. Switches
were transfer printed onto DE membranes using a polydimethyl-
siloxane (PDMS) stamp. Membranes were mounted on 3 mm-
thick transparent acrylic frames1 that had 60 x 35 mm windows,
and strips of PMMA (3mm wide) were placed between the actu-
ator and switch to promote a uniform deformation of the switch.
Metal screws and copper tape on the frames served as electrical
connections to a high voltage source.
A structural DES unit is demonstrated in both relaxed and
actuated states in Figure 1. Switches connected to a high volt-
age terminal were placed in series with a resistor, which inhib-
ited electrical breakdown of the switches and served as a pull-up
resistor [2] for the logic gates. The resistor value, 50 megohm,
was large enough to prevent spark erosion of the switches but
not too large to cause an excessive drop of voltage across itself
when the gate was in a state of sourcing current, i.e. had a high
(logical 1) output.
1poly(methyl methacrylate) (PMMA), common name: Perspex
2

DEA
DES
50 MΩ
+HV
GND
Vin=LowVout=High
DES unit=OFF
DE
A
DE
S
50 MΩ
+HV
x1
(a)
DEA
DES
50 MΩ
+HV
GND
Vin=High
Vout=Lowx1
x2
DES unit=ON
DE
A
DE
S
50 MΩ
+HV
x1
(b)
Fig. 1. Representative images (left), schematics (middle), and equivalent circuit diagrams (right) of a single DES unit: (a) off state and (b) on state. In the off, or
relaxed, state, the input voltage is zero so that the DE actuator and switch do not experience any mechanical strain beyond their pre-stretched state. In the on, or
actuated, state, the input voltage is high so that the DEA expands in area, indicated by arrows x1 and x2, and the DES is compressed. Since DEAs are essentially
flexible capacitors formed from pliable dielectrics and electrodes, they are represented by the symbol for a variable capacitor in the circuit diagrams.
2.1. Gate designs
The NOT gate (inverter) design, shown in Figure 2, is com-
prised of a single DES unit. A high voltage input (logical 1)
induces elongation in the actuator which compresses the switch
and decreases its resistance so that the voltage output becomes
low (logical 0). Inversely, a low voltage input (logical 0) will
not expand the actuator and the switch will remain non-conductive,
thus the voltage output will be high (logical 1).
50 MΩ
+HV
GND
V 1
Vout
Fig. 2. NOT gate (inverter) design schematic. +HV is 3 kV and V 1 is a square
wave voltage input.
The designs for 2-input gates are shown in Figure 3. It is
noteworthy that other structural designs are possible. In par-
ticular, the universal gates NAND and NOR can independently
form the other gates. For example, the NAND gate can behave
as an inverter either by using the same signal for both inputs
or by having only one changing input while the other input is
a constant high (logical 1) value. Additionally, multiple-input
gates, e.g. 3-input, are possible. The gate designs used in this
work provide proof-of-concept for each basic Boolean logic
gate using high voltage electromechanical DE switching.
3

50 MΩ+HV
GND
VoutV 2
V 1
(a)
50 MΩ
50 MΩ
+HV
GND
VoutV 2
V 1
(b)
50 MΩ
50 MΩ
+HV
GND
Vout
V 2
V 1
(c)
50 MΩ+HV
GND
Vout
V 2
V 1
(d)
50 MΩ
+HV
GND
V 2
V 1
50 MΩ
V 2
V 1
50 MΩ
Vout
(e)
50 MΩ
+HV
GND
V 2
V 1
50 MΩ
V 2
V 1
50 MΩ 50 MΩ
Vout
(f)
Fig. 3. Gate design schematics: (a) NAND, (b) AND, (c) NOR, (d) OR, (e) XNOR, and (f) XOR. +HV is 3 kV and V 1 and V 2 are square wave voltage inputs out
of phase with each other by 90 degrees.
2.2. Gate testing
The maximum voltage for an input signal was chosen to be
3 kV because it is within the range of operation for the pre-
strained DEA, which is approximately 2.5 kV (electric field 65
MV/m) to 3.5 kV (electric field 92 MV/m). Too low a voltage
is insufficient to induce enough stretch in the membrane to sig-
nificantly compress the switch, and too high a voltage would
cause catastrophic breakdown due to electromechanical insta-
bility [25] in the DEA.
In order to achieve all possible input combinations, i.e. 0
and 0, 0 and 1, 1 and 0, and 1 and 1, inputs V 1 and V 2 are
90 degree out-of-phase square wave voltages having 30 second
periods. Vout is the resulting voltage output measured across the
switch(es). For experimental purposes, voltage values above
2.5 kV are considered to be logical 1 and values below 1 kV
are considered to be logical 0. Measurements were taken with
LabView.
3. Results and Discussion
We have produced digital logic operators using DE actua-
tors and switches. Unlike standard logic gates made up entirely
of rigid electronic parts, the logic gates presented in this study
are soft and flexible and directly couple a mechanical input with
4
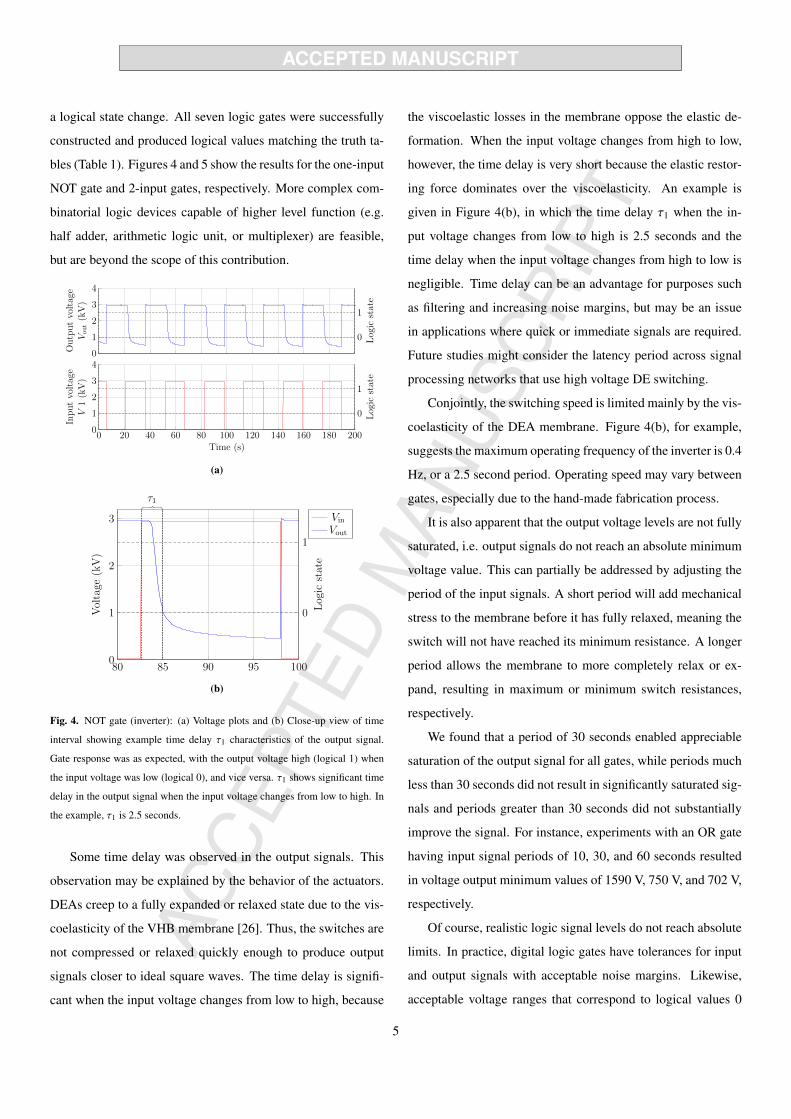
a logical state change. All seven logic gates were successfully
constructed and produced logical values matching the truth ta-
bles (Table 1). Figures 4 and 5 show the results for the one-input
NOT gate and 2-input gates, respectively. More complex com-
binatorial logic devices capable of higher level function (e.g.
half adder, arithmetic logic unit, or multiplexer) are feasible,
but are beyond the scope of this contribution.
0
1
2
3
4
Outputvoltage
Vou
t(kV)
0
1
Logic
state
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
Time (s)
Inputvoltage
V1(kV)
0
1
Logic
state
(a)
80 85 90 95 1000
1
2
3
Voltage
(kV)
0
1
τ1
Logic
state
VinVout
(b)
Fig. 4. NOT gate (inverter): (a) Voltage plots and (b) Close-up view of time
interval showing example time delay τ1 characteristics of the output signal.
Gate response was as expected, with the output voltage high (logical 1) when
the input voltage was low (logical 0), and vice versa. τ1 shows significant time
delay in the output signal when the input voltage changes from low to high. In
the example, τ1 is 2.5 seconds.
Some time delay was observed in the output signals. This
observation may be explained by the behavior of the actuators.
DEAs creep to a fully expanded or relaxed state due to the vis-
coelasticity of the VHB membrane [26]. Thus, the switches are
not compressed or relaxed quickly enough to produce output
signals closer to ideal square waves. The time delay is signifi-
cant when the input voltage changes from low to high, because
the viscoelastic losses in the membrane oppose the elastic de-
formation. When the input voltage changes from high to low,
however, the time delay is very short because the elastic restor-
ing force dominates over the viscoelasticity. An example is
given in Figure 4(b), in which the time delay τ1 when the in-
put voltage changes from low to high is 2.5 seconds and the
time delay when the input voltage changes from high to low is
negligible. Time delay can be an advantage for purposes such
as filtering and increasing noise margins, but may be an issue
in applications where quick or immediate signals are required.
Future studies might consider the latency period across signal
processing networks that use high voltage DE switching.
Conjointly, the switching speed is limited mainly by the vis-
coelasticity of the DEA membrane. Figure 4(b), for example,
suggests the maximum operating frequency of the inverter is 0.4
Hz, or a 2.5 second period. Operating speed may vary between
gates, especially due to the hand-made fabrication process.
It is also apparent that the output voltage levels are not fully
saturated, i.e. output signals do not reach an absolute minimum
voltage value. This can partially be addressed by adjusting the
period of the input signals. A short period will add mechanical
stress to the membrane before it has fully relaxed, meaning the
switch will not have reached its minimum resistance. A longer
period allows the membrane to more completely relax or ex-
pand, resulting in maximum or minimum switch resistances,
respectively.
We found that a period of 30 seconds enabled appreciable
saturation of the output signal for all gates, while periods much
less than 30 seconds did not result in significantly saturated sig-
nals and periods greater than 30 seconds did not substantially
improve the signal. For instance, experiments with an OR gate
having input signal periods of 10, 30, and 60 seconds resulted
in voltage output minimum values of 1590 V, 750 V, and 702 V,
respectively.
Of course, realistic logic signal levels do not reach absolute
limits. In practice, digital logic gates have tolerances for input
and output signals with acceptable noise margins. Likewise,
acceptable voltage ranges that correspond to logical values 0
5

and 1 can be selected. For example, 0 V to 1 kV may be the
low logic state and 2 kV to 3 kV may be the high logic state.
Enhanced digital signals may be achieved with better mate-
rials and an automated fabrication process. Improved actuator
membranes would have faster response times as well as aug-
mented reliability and lifetime. Improved switches would have
sharper and faster switching characteristics and a greater elec-
trical breakdown strength. Recently, a promising new switching
material was introduced by Chau et al. [27] that presents im-
proved characteristics compared to the original grease switch
used in this work. These improvements would also enable scal-
ing the designs, which is currently limited by spark erosion in
the switches, and increasing the cycle life. Other studies in
our lab have demonstrated up to 25,000 cycles in an oscillator
formed from three inverters in a closed loop.
A noteworthy benefit of this switching process that could be
utilized in future studies is that the input and output signals can
be electrically isolated. Since actuators and switches are me-
chanically coupled, they can be driven by different power sup-
plies, unlike semiconductor equivalents. Additionally, a DES
may be used as a voltage or power amplifier, similar to the way
a bipolar junction transistor (BJT) may be used [2].
DESs can be influenced not only by strains in adjacent actu-
ators but also by external strains from the environment. In this
way, our soft logic devices can be viewed to have two poten-
tial forms of input, one self-imposed mechanical deformation,
and the other a purely exogenous source of mechanical defor-
mation, and will respond with the same resultant logical state
change to both. Logic with mechano-feedback is an exciting
prospect for soft robots that aim to autonomously navigate and
adapt to unpredictable surroundings. There are many oppor-
tunities for advancements in this technology, and applications
may include biomimetic robots and wearable logic devices that
respond to environmental strains.
6

0
1
2
3
4
Outputvoltage
Vou
t(kV)
0
1
Logic
state
0
1
2
3
4
Inputvoltage
V1(kV)
0
1
Logic
state
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
Time (s)
Inputvoltage
V2(kV)
0
1
Logic
state
(a)
0
1
2
3
4
Outputvoltage
Vout(kV)
0
1
Logic
state
0
1
2
3
4
Inputvoltage
V1(kV)
0
1
Logic
state
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
Time (s)Inputvoltage
V2(kV)
0
1
Logic
state
(b)
0
1
2
3
4
Outputvoltage
Vou
t(kV)
0
1
Logic
state
0
1
2
3
4
Inputvoltage
V1(kV)
0
1
Logic
state
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
Time (s)
Inputvoltage
V2(kV)
0
1
Logic
state
(c)
0
1
2
3
4
Outputvoltage
Vou
t(kV)
0
1
Logic
state
0
1
2
3
4
Inputvoltage
V1(kV)
0
1
Logic
state
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
Time (s)
Inputvoltage
V2(kV)
0
1
Logic
state
(d)
0
1
2
3
4
Outputvoltage
Vou
t(kV)
0
1
Logic
state
0
1
2
3
4
Inputvoltage
V1(kV)
0
1
Logic
state
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
Time (s)
Inputvoltage
V2(kV)
0
1
Logic
state
(e)
0
1
2
3
4
Outputvoltage
Vou
t(kV)
0
1
Logic
state
0
1
2
3
4
Inputvoltage
V1(kV)
0
1
Logic
state
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
Time (s)
Inputvoltage
V2(kV)
0
1
Logic
state
(f)
Fig. 5. Voltage plots for 2-input logic gates: (a) NAND, (b) AND, (c) NOR, (d) OR, (e) XNOR, and (f) XOR. Results were as expected, with output voltage signals
matching logical output values from the truth tables (Table 1).
4. Conclusions
We have demonstrated that mechanosensitive DESs can be
used to construct all the fundamental Boolean logic operators.
Soft digital logic circuitry may provide local signal processing
for artificial muscles, another step toward creating smart robots
that are entirely soft and do not require external circuitry.
Future research could focus on using DE actuators and switches
to develop sequential logic circuitry, such as the flip-flop ele-
ment demonstrated by O’Brien et al. [28]. With both combi-
natorial and sequential logic circuitry available, complex func-
tions and programs may be implemented in smart artificial mus-
cle devices. As the initial introduction of digital logic to tech-
nology instigated a surge of computing capabilities, one can
imagine similarly boundless opportunities in a broad range of
applications for soft logic.
Multiple uses for flexible DES electrodes have been demon-
strated with artificial muscles, and it would be interesting to
next create a demonstrative device that combines all the ca-
pabilities of high voltage DE switching - something that can
sense, locally process information, and carry out a response,
analogous to a muscle reflex.
Acknowledgments
This work was funded by a US Army Research, Devel-
opment & Engineering Command Grant and was further sup-
ported by a fellowship within the Postdoc-Program of the Ger-
man Academic Exchange Service (DAAD) received by E.-F.
Markus Henke. The authors acknowledge Patrin K. Illenberger
for consultation on electrical engineering.
References
[1] A. Barna, D. I. Porat, Integrated Circuits in Digital Electronics, 2nd Edi-
tion, Wiley-Interscience, New York, 1987.
7
[2] W. Kleitz, Digital Electronics: A practical approach with VHDL, 9th Edi-
tion, Pearson/Prentice Hall, Boston, 2012.
[3] R. E. Pelrine, R. D. Kornbluh, J. P. Joseph, Electrostriction of polymer
dielectrics with compliant electrodes as a means of actuation, Sensors
and Actuators A: Physical 64 (1) (1998) 77–85.
[4] R. E. Pelrine, R. D. Kornbluh, Q. Pei, J. P. Joseph, High-speed electrically
actuated elastomers with strain greater than 100%, Science 287 (5454)
(2000) 836–839.
[5] Z. Suo, Theory of dielectric elastomers, Acta Mech. Solida Sinica 23 (6).
[6] P. Brochu, Q. Pei, Advances in Dielectric Elastomers for Actuators and
Artificial Muscles, Macromolecular Rapid Communications 31 (1) (2010)
10–36. doi:10.1002/marc.200900425.
[7] C. Keplinger, T. Li, R. Baumgartner, Z. Suo, S. Bauer, Harnessing snap-
through instability in soft dielectrics to achieve giant voltage-triggered de-
formation, Soft Matter 8 (2) (2012) 285–288. doi:10.1039/C1SM06736B.
[8] L. An, F. Wang, S. Cheng, T. Lu, T. J. Wang, Experimental investigation
of the electromechanical phase transition in a dielectric elastomer tube,
Smart Materials and Structures 24 (2015) 035006. doi:10.1088/0964-
1726/24/3/035006.
[9] R. D. Kornbluh, R. Pelrine, J. Joseph, R. Heydt, Q. Pei, S. Chiba, High-
field electrostriction of elastomeric polymer dielectrics for actuation, Vol.
3669, 1999, pp. 149–161.
[10] R. Pelrine, R. Kornbluh, Q. Pei, S. Stanford, S. Oh, J. Eckerle, R. Full,
M. Rosenthal, K. Meijer, Dielectric elastomer artificial muscle actuators:
toward biomimetic motion, in: Y. Bar-Cohen (Ed.), Smart Structures and
Materials 2002: Electroactive Polymer Actuators and Devices, Vol. 4695,
2002.
[11] J. D. W. Madden, N. A. Vandesteeg, P. A. Anquetil, P. G. A. Madden,
A. Takshi, R. Z. Pytel, S. R. Lafontaine, P. A. Wieringa, I. W. Hunter, Ar-
tificial muscle technology: Physical principles and naval prospects, IEEE
J Oceanic Eng 29 (3) (2004) 706–728.
[12] B. M. O’Brien, E. P. Calius, T. Inamura, S. Q. Xie, I. A. Anderson, Di-
electric elastomer switches for smart artificial muscles, Applied Physics
A 100 (2) (2010) 385–389.
[13] B. M. O’Brien, S. Rosset, H. R. Shea, I. A. Anderson, Cutting
the fat: artificial muscle oscillators for lighter, cheaper, and slim-
mer devices, Proceedings of SPIE 8340 (1) (2012) 834008–834008–8.
doi:doi:10.1117/12.915117.
[14] D. T. Beruto, M. Capurro, G. Marro, Piezoresistance behavior of silicone-
graphite composites in the proximity of the electric percolation thresh-
old, Sensors and Actuators, A: Physical 117 (2) (2005) 301–308.
doi:10.1016/j.sna.2004.06.027.
[15] M. Taya, W. Kim, K. Ono, Piezoresistivity of a short fiber/elastomer
matrix composite, Mechanics of Materials 28 (1-4) (1998) 53–59.
doi:10.1016/S0167-6636(97)00064-1.
[16] I. A. Anderson, T. A. Gisby, T. G. McKay, B. M. O’Brien, E. P.
Calius, Multi-functional dielectric elastomer artificial muscles for
soft and smart machines, Journal of Applied Physics 112 (041101).
doi:10.1063/1.4740023.
[17] B. M. O’Brien, I. A. Anderson, An Artificial Muscle Ring Oscillator,
IEEE/ASME Transactions on Mechatronics 17 (1).
[18] T. G. McKay, B. M. O’Brien, E. P. Calius, I. A. Anderson, Soft generators
using dielectric elastomers, Applied Physics Letters 98 (14) (2011) 2009–
2012. doi:10.1063/1.3572338.
[19] B. M. O’Brien, T. G. McKay, T. A. Gisby, I. A. Anderson, Rotating
turkeys and self-commutating artificial muscle motors, Applied Physics
Letters 100 (7) (2012) 74108.
[20] B. M. O’Brien, I. A. Anderson, An artificial muscle computer, Applied
Physics Letters 102 (104102).
[21] D.-H. Kim, J. Xiao, J. Song, Y. Huang, J. A. Rogers, Stetchable, Curvi-
linear Electronics Based on Inorganic Materials, Advanced Materials 22
(2010) 2108–2124.
[22] J. A. Rogers, T. Someya, Y. Huang, Materials and mechanics for stretch-
able electronics, Science 327 (5973) (2010) 1603–1607.
[23] D.-H. Kim, R. Ghaffari, N. Lu, J. A. Rogers, Flexible and Stretchable
Electronics for Biointegrated Devices, Annual Review of Biomedical En-
gineering 14 (2012) 113–128.
[24] P. J. Nahin, The Logician and the Engineer: how George Boole and
Claude Shannon created the information age, Princeton University Press,
2013.
[25] J. Zhou, W. Hong, X. Zhao, Z. Zhang, Z. Suo, Propagation of instabil-
ity in dielectric elastomers, International Journal of Solids and Structures
45 (13) (2008) 3739–3750. doi:10.1016/j.ijsolstr.2007.09.031.
[26] M. Wissler, E. Mazza, Mechanical behavior of an acrylic elastomer used
in dielectric elastomer actuators, Sensors and Actuators A 134 (2007)
494–504.
[27] N. Chau, G. A. Slipher, B. M. O’Brien, R. A. Mrozek, I. A. Anderson,
A solid-state dielectric elastomer switch for soft logic, Applied Physics
Letters 108 (10) (2016) 103506. doi:10.1063/1.4943628.
[28] B. M. O’Brien, T. G. McKay, S. Q. Xie, E. P. Calius, I. A. Anderson,
Dielectric elastomer memory, Vol. 7976, 2011, pp. 797621–797627.
8












![Gates and Logic: From Transistors to Logic Gates and Logic ......Gates and Logic: From Transistors to Logic Gates and Logic Circuits [Weatherspoon, Bala, Bracy, and Sirer] Prof. Hakim](https://static.fdocuments.net/doc/165x107/5fa95cb6eb1af8231472f381/gates-and-logic-from-transistors-to-logic-gates-and-logic-gates-and-logic.jpg)