Rotational Dynamics - NetBadi.com
91
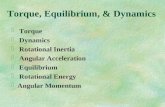
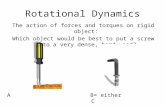
1 ROTATIONAL DYNAMICS www.NetBadi.com - Exclusive Illustration: 1 A one – miece cylinder is shaped as in figure with a core section producing from the larger drum. The cylinder is free to rotate around the central axis shown in the drawing. A rope wrapped around the drum, of radius R 1 , enters a force T 1 to the right on the cylinder. A rope warped around the core, of radius R 2 , enters a force T 2 downward on the cylinder. (a) what is the net torque acting on the cylinder about the rotation axis (which is the z – axis in figure)? (b) suppose T 1 = 5N, R 1 = 1.0 m, T 2 = 6n, and R 2 = 0.50 m. what is the net torque about the rotation axis and which way does the cylinder rotate if it starts from rest Figures Solution: (a) The torque due to T i is – R 1 T 1 . It is negative because it tends to produce a clockwise rotation from the point of view in figure. The torque due to T 2 is T 2 = R 2 T 2 and is positive because it tends to produce a counter clockwise 1 2 22 11 net RT RT (b) 22 11 net RT RT = (0.5) (6) – (1) (5) = - 2 N.m Because the net torque is negative, the cylinder rotates clockwise from rest. www.NetBadi.com www.NetBadi.com
-
Upload
yugandhar-veeramachaneni -
Category
Documents
-
view
922 -
download
2
Transcript of Rotational Dynamics - NetBadi.com

1
ROTATIONAL DYNAMICS
www.NetBadi.com - Exclusive
Illustration: 1
A one – miece cylinder is shaped as in figure with a core section producing from the larger drum. The cylinder
is free to rotate around the central axis shown in the drawing. A rope wrapped around the drum, of radius R1,
enters a force T1 to the right on the cylinder. A rope warped around the core, of radius R
2, enters a force T
2
downward on the cylinder. (a) what is the net torque acting on the cylinder about the rotation axis (which is the
z – axis in figure)? (b) suppose T1 = 5N, R
1 = 1.0 m, T
2 = 6n, and R
2 = 0.50 m. what is the net torque about the
rotation axis and which way does the cylinder rotate if it starts from rest
Figures
Solution:
(a) The torque due to Ti is – R
1 T
1. It is negative because it tends to produce a clockwise rotation from the point of
view in figure. The torque due to T2 is T
2 = R
2 T
2 and is positive because it tends to produce a counter
clockwise 1 2 2 2 1 1net R T R T� � �� � � � �
(b) 2 2 1 1net R T R T� � �
= (0.5) (6) – (1) (5) = - 2 N.m
Because the net torque is negative, the cylinder rotates clockwise from rest.
www.NetB
adi.com
www.NetBadi.com

2
Illustration: 2
A triangular plate of uniform thickness and density is made to rotate about an axis perpendicular to the plane of
the paper and (a) Passing through A (b) passing through D by the application of the same force F at c (mid –
point of AB) as shown in fig. In which case the torque is more?
Solution:
2 2A D
l lF and F� �� � � �
� � �� � � �
� Both are equal in magnitude
Illustration: 3
A rectangular plate in the x – y plane is shown in the figure. A force F = 30 N is applied at point B. Find the
moment of F about (a) the origin O (b) the point C (c) x – axis, y – axis, and z – axis. 0
30� �
Solution :
(a) 0 cos 30 2 sin 30 1F F� � � �
3 130 2 30
2 2
� �� � � �
�
130 3 .
2N m
� �� � ��
�
(b) cos 2 30 3c F Nm� � � � �
0 0x yand� �� �
130 3 .
2z N m� � �� � ��
�
Illustration: 4
A force 2 3 4F i j k N� � � is applied to a point having position vector 3 2 .r i j k m� � � Find the torque due to
the force about the axis passing through origin. Figure
Solution:
r F� �
3 2 2 9 4i j k i j k� � � � �
www.NetB
adi.com
www.NetBadi.com

3
3 2 1
2 3 4
i j l
�
5 10 5i j k Nnm�� � � �
22 25 10 5 5 6 .Nm�� � � � � �
SOLVED EXAMPLES:
1. A 450 N vertical force is applied to the end of a leaves which is attached to a shaff at 0. Determine (a) the
torque of the 450 N force about 0; (b( the horizontal force applied at A which create the same torque ‘0’. (c) the
smallest force applied at A which creates the same torque about 0; (d) how four from the shaff a 1100 N
vertical force must act to create the same torque about 0; (e) whether any one of the force obtained in parts b,
c and d is equivalent to the original force.
Figures
Solutions:
a. Torque about 0. The � distance from 0 to the line of action of 450 N force is d = 0.6 cos 60 = 0.3 m. The torque
about 0 of the 450 N force is 0 450 0.3 135F d Nm� � � � � . Since the force tends to rotate the leves clockwise
about 0, the torque will be represented by a vector 0� perpendicular to the plane of the figure and pointing into
the paper
b. Horizontal force d = 0.6 sin 60 = 0.5 m; 0 135 0.52Fd F� � � � � � � 260 .F N� �
c. Similar force, since 0 Fd� � , the smallest value of F occurs when d is maximum. We chose the force perpendicular
to OA and rote that d = 0.6 m. 0 Fd� � - 135 = - F (0.6) � F = 225 N.
d. 1100 N vertical force
135 1100 0.12 .d d m� � � � �
cos 60 0.24 .OB d OB m� � � �
e. None of the forces considered in parts b, c and d is equivalent to the original 450 N force. Although they hence
the same torque about 0, they have different x and y components. In of her words, although each force mannes,
each causes the leves to pull on the shaft in a different way.
2. A particle of mass m is projected with a speed u at an angle � with the horizontal at time t = 0. Find the torque
of the weight of the particle about the point of projection 0 at time t if when the particle is at the highest point.
Solution: 0 W� � �
= - W cos � t at the highest point,
0� �
siniv u ��
sinut
g
�� �
0
sincos .
uW u
g
�� �� � �
www.NetB
adi.com
www.NetBadi.com

4
2 sin cosmu � ��
Since the force tends to rotate the leves clockwise about 0, the torque will be represented by a vector 0�
perpendicular to the plane of the projectile and pointing into the papers.
3. A simple pendulum of length l is pulled a side to make an angle � with the vertical. Find the magnitude of the
torque of weight W of the bob about the point of suspension. When is the torque zero.
Solution: Figure
(i) 0 sinwl� �� �
sinwl �� (clockwise)
(ii) 0 0 sin 0wl� �� � �
0. . .,i e�� �
� When the bob is as the lowest point.
4. Calculate the total torque acting on the body shown in figure, about the point 0.
Solution: 0 10 4 5 0� � � � Figure
+ 20 cos 6 (4)
+ 15 sin 37 (6)
= - 40 + 40 + 54
= - 54 N cm = 0.54 N.
5. A cord is wrapped around a homogenous dist of radius r = 0.5 m and mass m = 15 kg. If the cord is pulled
upward with a force T = 180 N, determine the torque at the center
Solution: 0 180 0.5rT� � � � �
= - 90 N. m.
= 90 N. m. (clockwise) figure
TORQUE AND THE VECTOR PRODUCT:
Recall our stationary exercise bicycle from the preceding section. We caused the rotational motion of the wheel by
applying forces to the pedals. When a force is exerted not pass through the pivot, the body tends to rotate about
that axis. For example, when you push on a door, the door rotates about an axis through the hinges. The
tendency of a force to rotate a body about some axis is measured by a vector quantity called torque. Torque is
the cause of changes in rotational motion, and is analogous to force, which causes changes in translational
motion. Consider the wrench pivoted about the axis through O in figure 10.11 The applied force F generally can
act at an angle � with respect to the position vector r locating the point of application of the force. We define
the torque � (Greek letter tau) resulting from the force F with the expression † sinr F� �� .
It is very important to recognize that torque is defined only when a reference is specified, from which the distance r is
determined. We can interpret. Equation 10.18 in two different ways. Looking at the force components in figure
www.NetB
adi.com
www.NetBadi.com

5
10.11, we see that the component F cos � parallel to r will not cause a rotation around the pivot point, because
its line of action passes right through the pivot.
The line of action of a force is imaginary line colinear with the force vector and extending to infinity in both directions.
In general, torque is a vector. For rotation about a fixed axis, however, we will use italic, non bold notation and specify
the direction with a positive or a negative sing, as we did for angular speed and acceleration in Section 10.1. We
will treat the vector nature of briefly in a short while.
THE RIGID BODY IN EQUILIBRIUM:
We have defined a rigid body and have discussed torque as the cause of changes in rotational motion of a rigid body:
We can now establish models for a rigid body subject to torques that are analogous to those for a particle to
forces. We begin by imagining a rigid body with balanced torques.
Consider two forces of equal magnitude and opposite direction applied to an object s shown in figure 10.16 a.
The force directed to the right tends to rotate the object clockwise about an axis perpendicular to the diagram
through O, whereas the force directed to the left tends t rotate it counterclockwise about that axis. Because the
forces are of equal magnitude and act at the same perpendicular distance from ), their torques are equal in
magnitude. Thus, the net torque on the rigid body is zero. The situation shown in figure 10.16 b is another case
in which the net torque about O is zero (although the net force on the object is not zero), and we can devise
many more cases.
With no net torque, no change in rotational motion and the rotational motion of the rigid body remains in its
original state. This is an equilibrium situation; analogous to translational equilibrium, discussed in Chapter 4.
We now have two conditions for complete equilibrium of an object, which can be stated as follows:
The net external force must equal zero
0F ��The net external torque must be zero about any axis
0� ��
The first condition is a statement of translational equilibrium. The second condition is a statement of rotational equilibrium.
In the special of static equilibrium, the object is at rest, so that it has no translational or angular speed
. ., 0 0CMi e and� �� � .
The two vector expressions given by Equations 10.24 and 10.25 are equivalent, in general, to six scalar equations:
three from the first condition of equilibrium, and three from the second (corresponding to x, y, and z components).
Hence, in a faced with solving a set of equations with many unknowns. Here, we restrict our discussion to
situations in which all the forces lie in the x, y plane. (Forces whose vector representations are in the same
plane are said to be coplanar.) With this restriction, we need to deal with only three scalar equations. Two of
these come from balancing the forces in the x and y directions. The third comes from the torque equation,
namely, that the net torque about an axis through any point in x y plane must be zero. Hence, the two conditions
of equilibrium provide the equations.
0 0 0x y zF F �� � �� � �Where the axis of the torque equation is arbitrary.
www.NetB
adi.com
www.NetBadi.com

6
Quick Quiz 10.8:
a. Is it possible for a situation to exist in which Equations 10.24 is satisfied, but Equation 10.25 is not?
b. Can Equation 10.25 be satisfied, but Equation 10.24 is
In working static equilibrium problems, it is important to recognize all external forces acting on the object. Failure to do
so will result in an incorrect analysis. The following procedure is recommended when analyzing an object in
equilibrium under the action of several external forces:
Problem – Solving Strategy:
1. Make a sketch of the rigid body under consideration.
2. Draw a free – body diagram, and label all external forces acting on the object. Try to guess the correct direction
for each force. If you select a direction that leads to a negative sign in your solution for a force, do no be
alarmed; this merely means that the direction of the force is the opposite of what you guessed.
3. Resolve all forces into rectangular components, choosing a convenient coordinate system. Then apply the first
condition for equilibrium, Equation 10.24. Remember to keep track of the signs of the various force components.
4. Choose a convenient axis for calculating the net torque on the rigid body. Remember that the choice of axis for
the torque equation is arbitrary therefore; choose an axis that will simplify your calculation as much possible.
Usually, the most convenient axis for calculating torques is one through a point at which several forces act, so
that their torques around this axis is zero. If you don’t know a force or don’t need to know a force acts. Apply
the second condition for equilibrium, Equation 10.25
5. Solve the simultaneous equations for the unknowns in terms of the known quantities.
Example 10.8 Standing on a Horizontal Beam :
A uniform horizontal beam of length 8.00 m and weight 200 N is attached to a wall by a pin connection. Its far end is
supported by a cable that makes an angle of 53.00 with the horizontal (Fig. 10.17 a). If a 600 – N man stands
2.00 m from the wall, find the tension in the cable and the force exerted by the wall on the beam.
Solution: The beam – man system is at rest and remains at rest, so it is clearly in static equilibrium. First we must
identify all the external forces acting on the system, which we do in the free – body diagram in figure 10.17 b.
These are the weights of the beam and the man, the force T exerted by the cable, the force R exerted by the
wall at the pivot (the direction of this force is unknown). (The force between the man and the beam is internal
to the system, so it is not included in the free – body diagram.) Notice that we have imagined the gravitational
force on the beam as acting at its center of gravity. Because the beam is uniform, the center of gravity is at the
geometric center. If we resolved T and R into horizontal and vertical components (Figure 10.17 c) and apply the
first condition for equilibrium for the system, we have
www.NetB
adi.com
www.NetBadi.com

7
1. 0cos cos 53.0xF R T�� ��
2. 0
sin sin 53.0 600 200 0yF R T N N�� � � � ��
Because we have unknowns – R, T and � - we can obtain a solution from these two expression alone.
To generate a third expression, let us invoke the condition for rotational equilibrium, because the system can be
modeled as a rigid body in equilibrium. A convenient axis to choose for our torque equation is the one that passes
through the pivot at the wall. The feature that makes this point so convenient is that the force R and the
horizontal component of T both have a lever arm of zero, and hence zero torque, about this pivot. Recalling our
convention for the sign of the torque about an axis and noting that the lever arms of the 600 – N, 200 N, and T
sin 530 forces are 2.00 m, 4.00 m, and 8.00 m, respectively, we have
0sin 53.0 8.00 600 2.00T m N m� � ��
200 4.00 0N m� �
T = 313 N.
The torque equation gives us one of the unknowns directly! This is due to our judicious choice of the axis. This value
is substituted into (1) and (2) to give
cos 188R N� �
sin 550R N� �
We divide these two equations to find
550tan 2.93
188
N
N� � �
07.1� �
Finally,
0
188 188581
cos cos 71.1
N NR N
�� � � .
If we had selected other axis for the torque equation, the results would have been the same, although the details of the
solution would be some what different. For example, if we had chosen to have the axis pass through the center
of gravity of the beam, the torque equation would involve both T and R. However, this equation, coupled with
(1) and (2), could still be solved for the unknowns T, R and � , yielding the same results. Try it!
Example 10.9 The Leaning Ladder:
A uniform ladder of length l and mass m against a smooth, vertical wall (Fig. 10.18 a). If the coefficient of static
friction between ladder and ground is 0.40,s� � find the minimum angle min� such that the ladder does not slip.
www.NetB
adi.com
www.NetBadi.com

8
Solution: The ladder is at rest and remains at rest, so we model it as a rigid body in equilibrium. The free – body
diagram showing all the external forces acting on the ladder is illustrated in Figure 10.18 b. The reaction R
exerted by the ground on the ladder is the vector sum of a normal force n and the force of static friction f. The
reaction force P exerted by the wall on the ladder is horizontal, because the wall is smooth, meaning that it is
frictionless: Thus, P is simply the normal force on the ladder from the wall. From the first condition of equilibrium
applied to the ladder, we have
0xF f P� � ��0yF n mg� � ��
We see from the second equation that n = mg. Further moment when the ladder is on the verge of slipping, the force
of friction must be a maximum, given ,maxs sf n�� . The find � , we use the second condition of equilibrium.
When the torques are taken about the origin O at the bottom of the ladder, we have
sin cos 02
O P mg� � �� � �� ��
This expression gives
min
.max
1tan 1.2
2 2 2 2 0.40s s
mg n n
P f n�
�� � � � �
0mintan 51� � .
It is interesting that the result does not depend on l or m. The answer depends only on s� .
EXERCISE: Two children weighing 500 N and 350 N are on uniform board weighing 40.0 N supported at its center
(“see – saw”). If the 500 N child is 1.50 m from the center, termine (a) the upward force exerted on the board
by the support and (b) where the 350 – N child must be balanced the system.
Answer: (a) 890 N (b) 2.14 m from the center.
Notes:
1. On tilting, a body will restore its initial position due to torque of weight about the point O hill the line of action of
weight passes through its base. On tilting, a body will topple due to torque of weight about 0, if the line of action
of weight does not pass through its base. This is self evident from Figures
2. A body is said h be in rotational equilibrium if resultant torque acting on it is zero, i.e., 0�� � e.g., in case of
beam balance or see – saw system will be in rotational equilibrium if
1 2 0� �� �
www.NetB
adi.com
www.NetBadi.com

9
Or1 1 2 20 0F l F l �
Or 1 1 2 2F l F l�
However, if 1 2� �� L.H.S will none downwards and if 1 2� �� R.H.S will none downwards and
the system will not be in rotational equilibrium. Figure.
Illustration – 1
Discuss whether or not a body is in equilibrium and what type of motion does it execute when two oppositely directed
forces are applied to it.
Solution: There are four possibilities depending on the magnitude and point of applications of the forces:
(A) When the forces are equal and act along the same line. As shown in figure (a) in this situation:
0 0F and �� � � �
So the body is in both translator as well as in rotatory equilibrium, i.e., body will remain as rest initially it was at rest.
(B) When the forces are equal and does not act along the same line.3
As shown in figure (b) in this situation 0F� � but 0 Fl�� � � so the body is the translatory
equilibrium but not in rotatory equilibrium, i.e., if will not translate but will rotate, i.e., will spin.
(C) When the forces are unequal and act along the same line. As shown in figure (c) in this situation.
0 0but �� � � �
So the body i.e, in rotatory equilibrium but not in translatory equilibrium, i.e., it will not rotate but
will translate, i.e., will slip or said
(D) When the forces are unequal and does not act along the same line. As shown in figure (D) in this
situation:
0 0F and �� � � �
So the body is neither in translatory nor in rotatory equilibrium, i.e., it will rotate and as well as
translate, i.e., will roll.
Examples:
www.NetB
adi.com
www.NetBadi.com

10
1. A uniform cube of side 2a and mass M rests on a rough horizontal table. A horizontal force F is applied normal
to one of the faces at a point that is directly above the center of the face, at a height (c) above the base. What
is the minimum value of F for which the cube begins to tip about an edge?
Solution: As shown in Fig, the cube will tip about the edge through ‘O’ if torque of F exceeds the torque of Mg (torque
of R about O is zero) i.e., F C Mg a � or a
F Mgc
� i.e., min
aF Mg
c� .
Case (i) Let 3
2
aC � .
2. In many situations an external force is applied to a body cause if to slide along a surface. In certain cases, the
body may tip over before sliding ensues; show the criteria that may be used to predict whether sliding or tipping
occurs.
Solution: Fig (a) shows a body which rests on a horizontal plane. The weight of the body is W and it has the dimensions
2b and h, � is the coefficient of friction. A force � , at a distance c above the plane, is applied to the body..
Three figures
The free body diagram of the body is shown in figure (b). The normal reaction force N is assumed to
act at distance of d to the right of the line of action of the weight W. For this first case, the body is
assumed not to slide.
0; 0A PC Wd�� � � � �
WdC
p� �
As the force P is applied at larger values of h, the location of the line of action of the normal force N moves to the
right. A limiting condition occurs when d = b. For this case the normal force acts at the right – hand edge of the
body. The body is in a condition of impending tipping motion about the right hand corner, and the corresponding
value of C is desegregated as Cman
.
0 0; 0manPC Wb�� � � � �
man
WdC
p� …………… (1).
The condition for sliding:
It sliding motion of the body is assumed to be impending, the friction force Fman
is given by manF ��� . The equilibrium
requirements of the body are
www.NetB
adi.com
www.NetBadi.com

11
0; 0xF � ��� � � �
0, 0yF W �� � � � �
The force P is then formed to be
W� �� …………… (2).
P in the above equation is the value of applied force which is required to cause impending sliding motion of the
body. If sliding and timing are assumed to be equally likely to occur, the W may be eliminated between Equations
(1) and (2), with the result
man
bC
�� …………… (3).
The result in the above equation is independent of the weight W and height h of the body, and of the applied force P,
and is a function only of the dimension b and the coefficient of friction.
From Equation (3) it is seen that if we have a block of such proportions that b/h > m, the block will slide before
overturning, regardless of the point of application of the horizontal force P.
The five possible district regious of motion are:
1. C < Cman
w� �� ; Neither tipping nor sliding occurs, and the body remains at rest.
2. C < Cman
, w� �� . The body does not tip, and sliding motion is impending.
3. C < Cman
w� �� ; The body does not tip but sliding motion occurs.
4. C = Cman
, w� �� ; Both sliding and tipping motion are impending simultaneously..
5. C > Cman
: The body will tip over for any value of � , with one or the other of the following conditions. If w
�� �
or ,w� �� the on set of tipping motion will occur with the tipping edge remaining stationary with respect to the
surface. Otherwise with w
�� � or w� �� , the onset of tipping motion will be accompanied by the onset of
sliding motion of the edge along the surface.
3. A cubical block of mass m and edge a slides down a rough inclined plane of inclination � with a uniform speed.
Find the torque of the normal force acting on the block about its center.
Solution : Since the block slides with constant speed, so the net force on the block must be zero.
0; sinxF f mg �� � � � Figure
0; cosyF mg� �� � �
Now, 0c�� � , (rotational equilibrium torque due to normal reaction (clockwise)
= torque due to frictional force (anti clockwise)
= sin2
amg � .
4. Two small kids weighing 10 kg 15 kg are tying to balance a see saw of total length 5m, with the fulcrum of the
centre. If one of the kid is sitting at an end, where should the other sit.
Solution: It is clear that the 10 kg kid should sit at the end and the 15 kg kid should sit closer to the centre. For rotational
equilibrium, 0c�� � (10 kg)g (2.5 m) – (15 kg) g (x) = 0
1.7 .x m� �
www.NetB
adi.com
www.NetBadi.com

12
5. The ladder shown in figure has negligible mass and rests on a frictionless floor. The cross bar connects the two
legs of the ladder at the middle. The angle between the two legs is 600. The fat person sitting on the ladder has
a mass of 80 kg. Find the contact force exerted by the floor on each leg and the tension in the cross bar. (g =
10) m/s2.
Solution: The forces acting on different parts are shown in figure. The body is in equilibrium.
0; 2 0yF W �� � � � �
80 10400
2 2
W� �
� � � �
Next consider the equilibrium of the left leg of the ladder 2
cos 30l �
0; sin 30 1 0c l T� �� � � �
2 tan 30 400 2 tan 30T �� � �
800
3T �� �
Rigid Body under a net torque:
In the preceding section, we investigated the equilibrium situation in which the net torque on a rigid body is zero. What
if the net torque on a rigid body is not zero? In analogy with Newton’s second law for translational motion, we
should expect the angular speed of the rigid body to change. The net torque will cause angular acceleration of
the rigid body.
Let us imagine a rotating rigid body again as a collection of particles. The rigid body will be subject to a number
of forces applied at various locations on the rigid body, at which individual particles will be located. Thus, we
can imagine that the forces on the rigid body are exerted on individual particles of the rigid body object due to
the torques resulting from of these forces around the rotation axis of the rotating body. Any applied force can be
represented by its radial component and its tangential component. The radial component for an applied force
provides t\no torque because its line of action goes tangential component of an applied force contributes to the
torque.
On any given particle, described by index variable i , within the rigid body, we can use Newton’s second law to
describe the tangential acceleration of the particle;
it i iF m at�
Where the t subscript refers to tangential components.
Multiply both sides of the expression by ri , the distance of the particle from the rotation axis;
i ii t i i tr F r m a�ii i tr F� ��
2i i i im r� ��
it i ia r ���
Add the torques n all particle of the rigid body
2. .i i i i
i i
m r� ��� �
The left side is the net torque on all particles of the rigid body. The net torque associated with internal forces is
zero, however. To understand this, recall that Newton’s third law tells us that the internal force occur in equal
and opposite pairs that lie along the line of separation of each pair of the particles. The torque due to each action
www.NetB
adi.com
www.NetBadi.com

13
– reaction force pair is therefore zero. On summation of all torques, we see that the net internal torque vnishes.
The term on the left, then reduce to net central torque. On the right, we impose the rigid body model by
demanding that all particles have the same angular acceleration.
2.i im r� �
� �� � � � �
��
.I� �� � � ………….. (1).
i.e., The net torque acting on the rigid on the rigid body is proportional to its angular acceleration proportional constant
is the moment of inertia.
Problem 27: A uniform cylinder of radius R is spinned about its axis with an angular velocity 0� and then placed into
a corner as shown in figure 48. The coefficient of friction between the wall and cylinder as well as the ground
and the cylinder is � . How many turns will the cylinder accomplish before it stops?
Solution: First Method: Free body diagram is shown in figure 49. Its is clear from figure that
2 1 1N F N�� � ……… (1)
And F2 + N
1 = mg ……… (2)
Now, 22 2 1F N N� �� � ……… (3)
From equation (2),
2 2 21 1 1 11 / 1N mg N or N mg or N mg� � �� � � � � �
2 2 2 21 1 2 1/ 1 / 1F N mg and F N mg� � � � � �� � � � � � � …………(5)
Total frictional force acting on the cylinder : 1 2 2
1
1
m gF F F
� �
�
�� � �
�
Torque due to this force, 2
1
1
m g RF R
� ��
�
�� �
�
As 2 2 2
1 2 11 ,
1 1 1/ 2 1
m g R g
m R R
� � � ��� � �
� �
� �� � � � �
� � .
30.13 Motion of a Body Tied to a String and Passing Over a Pulley
www.NetB
adi.com
www.NetBadi.com

14
Consider a body tied to string and passing over a pulley as shown in figure. 30.8. Let the body descend under
the force of gravity.
Let m = Mass of the body in kg (so that its weight is m. g Newton’s)
M = Mass of the pulley in kg
I = Moment of inertia of the pulley,
r = Radius of the pulley,
k = Radius of gyration of the pulley.
a = Linear acceleration of the body,
� = Angular acceleration of the pulley, and
P = Pull in the string in Newton’s.
+
P
P
m
Kinetic of Motion of Rotation:
First of all, consider the motion of the body, which is coming down. We known that the forces acting on it are m.
g Newton’s (downwards) therefore resultant force acting on it
= m. g – P Newton’ s. …………. (i)
Since the body is moving downwards, with an acceleration (a) therefore force acting on it.
= m. a Newton’s …………. (ii)
Equating equations (i) and (ii),
m.g – P = m. a …………. (iii)
now consider motion of the pulley, which is rotating about its axis due to downward motion of the body tied to the
string. We know that linear acceleration of the body is equal to the angular acceleration of the pulley.
.r� �� � …………. (iv)
And torque, T = Tension in the string
Radius of the pulley
= P r …………… (v)
We also know that torque on the pulley,
T = I. �
Equating equations (v) and (vi)
.P r I � �
2. .P I r�� …………. (Multiplying both sides by r}
= I. a
2
.I aP
r� � …………… (vii),
Substituting the value of P in equation (iii).
2
.. .
I am g m a
r� �
2
.. .
I am g m g
r� �
www.NetB
adi.com
www.NetBadi.com

15
2.
Ia m m g
r
� �� ��
�
2
2 2
.
.
a m ga
I M km mr r
� � �� � � �
� �� � � � �…………… (viii)
Now substituting the value of a in equation (vii),
2 2
2
. . .I m g I m gP
Ir m r Im
r
� �� � ��� �
…………….. (ix)
Problem 22: A light thread with a body of mass m tied to its end is wound on a uniform solid cylinder of mass M and
radius R (fig 42). At a moment t = 0, the system is set in motion. Assuming the friction in the axle of the cylinder
to be negligible, find the time dependence of (a) the angular velocity of the cylinder.
Solution: (a) Because the system is released from rest hence u = 0 at t = 0. According to free body diagram shown
in figure 43, we have
mg = T = ma ………… (1) figure
Where a represents the downward acceleration of the system and T the tension in the thread. If I is the moment of
inertia of the cylinder about an axis passing through its centre and � , the angular acceleration produced in it,
then
21 1
2 2T R I M R or T M R� � �� � � ………… (2) figure
Adding (1) and (2), we get :1 1 1
( / )2 2 2
mg ma M R m R M R M R as a R� � � � �� � � � � �
Or,2
2 2 ,2
mgmg m R M R or
m M R� �� � �
� .
Integrating on both sides, we get: 2
2
m g tC
m M R� � �
�
Now, at t = 0, � = 0, Hence C = 0
Thus 2
2
m g t
m M R� �
� .
Problem 23: A wheel of radius r and moment of a inertia I about its axis is fixed at the top of an inclined plane of
inclination � (Fig 44). A string is wrapped round the wheel and its free end supports a block of mass M which
can slide on the plane. Initially, the wheel is rotating at a speed � in a direction such that the block slides up the
plane. How far will the block move before stopping? Figure
www.NetB
adi.com
www.NetBadi.com

16
Solution: As the block moves up, it goes on decelerating learning continuously due to net force on it acting down the
plane. If a be the deceleration of the block, then the linear deceleration of the rim of wheel is also equal to a but
angular deceleration of the wheel is � = a/r..
Now, if T is the tension in the sting, then equations of motion are :
Mg sin � - T = Ma ………………. (1)
And Tr = I� = I (a/r) ………………. (2)
Eliminating T, we get 2
2 2
sinsin ,
1
I a MgrMg Ma or a
r Mr
�� � � �
�
Initial velocity of the block up the plane = v = � r
Thus distance moved by the block before stopping is
2 2 2 2 22
22 2 sin2 sin
r I Mr I Mrvs
a MgM gr
� �
��
� �� � � .
1. A right circular cylinder of mass m and radius r is suspended from a cold that is wound around its circumference.
If the cylinder is allowed to fall.
Kinetics of rigid body: Force and acceleration:
Let the acceleration of the mass centre G be a and its angular acceleration� . Equations of motion of the cylinder can
be written as,
x xF ma� � : No forces acting
:y yF ma� � mg – T = ma ……….. (i)
:G G GM I Tr I� �� � �
2
2
m rTr �� ……….. (ii)
As there is no slip,
,a
a rr
� �� � .
Eliminating T from (i) and (ii) and substituting for �
2
mr amg ma r
r
� �
2
ag a� �
www.NetB
adi.com
www.NetBadi.com

17
2
3a g� Ans:
From (i) 2
3T m g a m g g
� �� � � �� �
3
mgT � Ans.
Problem 11: The moment of inertia of a reel of thread of radius R and mass M about its axis is I. If the loose and of
the thread is held in hand and rest is allowed to unroll itself falling down under the action of gravity show that.
a. It falls down with an acceleration, 21 /
ga
I MR�
�
Solution: (a) When the reel unrolls itself under the action of gravity, the downward force due to gravity Mg, must
exceed the upward force i.e., tension T of the thread. Hence, if a is the tangential acceleration of a point on the
rim of reel, Newton’s second law of motion yields
Mg – T = Ma ………… (1)
The resultant torque on the reel is TR, so that from I� �� we get
TR = I� or TR = Ia/R …………… (2)
Where a and � represent linear and angular accelerations respectively..
Eliminating T from (1) and (2), we have
M (g – a) R = Ia/R or a = g/[1 + (I/MR2)] …………… (3)
30.14 Motion of Two Bodies Connected By a String and Passing Over a Pulley:
Consider two bodies connected by an inextensible light string and passing over a simple pulley as shown in figure.
30.10
Let m1 and m
2 = Masses of the two bodies in kg (such that their weights are m
1.g and m
2.g in Newton’s)
Let m1 be greater than m
2. A little consideration will show that the greater mass m
1 will move downwards, whereas
the smaller one will move upwards.
Let a = Acceleration of the two bodies,
P1 and P
2 = Pulls in the string in Newton’s
� = Angular acceleration of the pulley,,
r = Radius of the pulley,
M = Mass of the pulley,
www.NetB
adi.com
www.NetBadi.com

18
I = Moment of inertia of the pulley, and
k = Radius of gyration of the pulley.
First of all, consider the motion of body 1 of mass m1 kg, which is coming down. We know that the forces acting on it
are m1 g Newton’s (downwards) and P
1 Newton’s (upwards). As the body is moving downwards, therefore,
resultant force
= m1.g – P Newton’s ………….. (i)
Since the body is moving downwards with an acceleration (a) therefore force acting on it.
= m1.a ………….. (ii)
Equating equations (i) and (ii),
m1.g – P = m
1 a. ………….. (iii)
Now consider the motion of body 2 of mass m2 kg, which is going upwards. We know that the forces acting on it are
m2.g Newton’s (downwards) and P
2 Newton’s (upwards). As the body in moving upwards, therefore, resultant
force
= P2 – m
2.g Newton’s
Since the body is moving upwards with an acceleration (a) therefore force acting on it
= m2.a ………….. (v)
Equating equations (iv) and (v).
P2 – m
2.g = m
2. a
Now consider motion of the pulley, which is rotating about its axis due to downward motion of the body of mass m1 tied
to the string. We know that linear acceleration of the body 1 is equal to the angular acceleration of the pulley.
.a r �� � ………….. (vii)
And torque, T = Net tension in the string Radius of pulley
1 2P P r� � ………….. (viii)
We also know that torque on the pulley,
.T I �� ………….. (ix)
Equating equations (viii) and (ix),
1 2 .P P r I �� �
21 2 . .P P r I r�� � (Multiplying both sides by r)
= I. a …….. .a r x� �
2 2
.I aP P
r� � �
Problem 42: In the arrangement shown in figure 59, the mass of the uniform solid cylinder of radius R is equal to m
and the masses of the two bodies are equal to m1 and m
2. The thread slipping and the friction in the axle of the
cylinder are supposed to be absent. Calculate the angular acceleration of the cylinder and the ratio of tensions
T1/T
2 of the vertical sections of the thread in the process of motion.
www.NetB
adi.com
www.NetBadi.com

19
Solution: The free – body – diagram is shown in figure 60. Because the pulley has got a mass hence tensions in the
two strings will be different. Hence, equation of motion for mass m1 :
m1 g – T
1 = m
1a ……………. (1)
For mass m2 : T
2 = m
2g = m
2a ……………. (2)
For rotational motion of cylinder : (T1 – T
2) R = I� ……………. (2)
Here a represents linear acceleration and � implies angular acceleration
Adding equations (1) and (2), m1g – T
1 + T
2 - m
2 g = (m
1 + m
2)a.
Or 1 2 1 2 1 2m m g T T m m R�� � � � �
Or 1 2 1 2/m m g I R m m R� �� � � � [From eq. (3)]
Or 2
1 2 1 2 /m m g m m I R R�! "� � � �# $
1 2
21 2 /
m m g
R m m I R�
�� �
! "� �# $
1 2 1 2
2 21 21 2
2
2 2/ 2 /
m m g m m g
R m m mR m m I m R R
� �� �
� �! "� �# $
From equation (2) and (3), we get : 1
22 2 2 2 2
1[ ( / ]
T I I I
T RT R m a m g R m g R
� � �
�� � � �
� �
21 2 1 22
[1 { (2 2 ) / 2( ) }[1 ( / )]
I I
g m m m R m m g Rm R g R�� �
� � � ��
21 2 1 2
22 12 1 2 1 2
(1/ 2) 2 ( ) ( )
[4 ][2 2 2 2 ]
mR m m m m m
m m mm R m m m m m
� �� �
�� � � �
1 1 2 2
2 2 1 2 1
( ) (4 )1
(4 ) ( )
T m m m m m m
T m m m m m m
� �� � � �
� � .
Problem 43: In the system shown in figure 61, the masses of the two bodies are m1 and m
2, the coefficient of friction
between the body m1 and the horizontal plane is equal to � , and a pulley of mass m is assumed to be a uniform
disc. The thread does not slip over the pulley. At the moment t = 0 the body m2 starts descending. Assuming
www.NetB
adi.com
www.NetBadi.com

20
the mass of the thread and the friction in the axle of the pulley to be negligible, calculate the work performed by
the frictional forces acting on the body m1 over the first t second after the beginning of the motion.
Solution: Free body diagram is shown in figure 62. If a and � represent the linear and angular acceleration respectively,,
then equations of motion for linear and rotational motions are given by:
1 1 1T m g m a�� � …………… (1)
2 2 2m g T m a� � …………… (2)
2 1T T R I�� � …………… (3)
Adding equation (1) and (2), we get
2 1 2 1 1 2T T m g m g m m a�� � � � �
Or2 1
2 1 1 2
1 2
2( )/ ( )
2( )
m m gm g m g I R m m a or a
m m m
�� �
�� � � � �
� �
21[ / ( ) ]
2a R and I m R� � ��
Suppose the Mass m2 falls through h, hence
22 1 2 12
1 2 1 2
2 21 1
2 2 2 2
m m gt m mh at and v at gt
m m m m m m
� �� �� � �
� � � �
According to law of convention of energy : 2 2 2
2 1 1 1 2
1 1 1
2 2 2m gh m v m v I W�� � � �
Also, 1 2v v v R at�� � � �
2 2 2 2 2 22 1 2 2
1 1 1/ 2 /
2 2 2fm gh m a t m a m R a t R W� � � � �
Or 2 2
2 2 14 2 2 fm gh m m m a t W� � � �
22 1 2 2
2 2 1
1 2
4 2 22(
f
m m gtW m g m m m a t
m m m
��� � � � �
� �
www.NetB
adi.com
www.NetBadi.com

21
22 2 2 22 1 2 1
21 2 1 2
44
2 2
m m g t m m g tm
m m m m m m
� �� �� �
� � � �
2 22 1 2 1 1 2 1 12 2
1 2 1 2
44
2 2
m m m m m g t m m mg t
m m m m m m
� � � �! "� � � �� �% &
� � � �% &# $.
Kinetics of Motion of Rotation
Dividing both sides by 2,
147 – P2 = 0.95 � ……….. (x)
From equation (vi) we find that
P2 – 98 = 10 a
2 = 10 0.1 � = � ……….. (xi)
Adding equations (x) and (xi),
49 = 1.95 ……….. (x).
249 /1.95 25.1 /rad s�� � �
Pulls in the two parts of the string
Substituting the value of � in equation (x).
2147 0.95 0.95 25.1 23.8P �� � � �
2 147 238 123.2P N� � � � Ans.
Now substituting the value of � and P2 in equation (ix),
1 0.4 25.1 123.2 133.2P N� � � Ans:
Example 30.14 Two bodies A and B of mass 150 kg and 75 kg respectively are supported by a string of negligible
mass and pass over a composite pulley. The bodies rest on two smooth inclined planes as shown in figure 30.13.
If the pulley has a mass of 75 kg and radius of gyration of 100 mm, find the accelerations of the masses A and B pulls
in the strings. Naglet friction in the bearings.
Solution: Given; m1 = 150 kg; m
2 = 75 kg; M = 75 kg; k = 100 mm = 0.1 m; r
1 = 250 mm = 0.25 m; r
2 = 125 mm = 0.125
m.
Pulls in the strings
Let P1 = Pull in the string carrying 150 kg mass, and
P2 = Pull in the string carrying 75 kg mass.
www.NetB
adi.com
www.NetBadi.com

22
From the geometry of the masses, we find that the turning moment of mass 150 kg (i.e., 150 sin 450 0.25 = 150 0.707 0.25 = 26.5 kg – m). It is thus obvious that the 150 kg mass will come downwards and the 75 kg mass
will go upwards, when the system is released.
Example 30.13: Two masses of 30 kg and 10 kg are tied to the two ends of a light string passing over a
composite pulley of radius of gyrations as 70 mm and mass 4 kg as shown in figure 30.12
Find the pulls in the two parts of the string and the angular acceleration of the pulley.
Solution: Given: m1 = 30 kg; m
2 = 10 kg; k = 70 mm = 0.07 m; M == 4 kg; d
1 = 100 mm = 0.1 m or r
1 = 0.05 m;
Angular acceleration of the pulley
Let P1 = Pull in the string carrying 30 kg mass,
P2 = Pull in string carrying 10 kg mass, and
� = Angular acceleration of the body..
From the geometry of the masses, we find that turning moment of the mass 30 kg (i.e., 30 0.05 = 1.5 kg – m) is more
than that of the mass 10 kg (i.e., 10 0.1 = 1 kg – m). It is thus obvious, that the 30 kg mass will come
downwards and the 10 kg mass will go upwards, when the system is released.
Substituting the value of P1 in equation (iii)
1039 – (0.5 P2 + 3� ) = 150 a
1 = 150 0.25 �
1039 – 0.5 P2 - 3� = 37.5 �
21039 0.5 37.5 3 40.5P � � �� � � � �
Multiplying both sides by 2 …………. (x)
2078 – P2 = 81 �
From equation (vi), we find that
2 2367.5 75 75 0.125 9.4P a � �� � � �
Adding equation (x) and (xi)
1710.5 = 90.4 �
21710.5 / 90.4 18.9 /rad s�� � �
Now substituting the value of � in equation (x),
22078 81 81 18.9 1531P �� � � �
2 2078 1531 547P N� � � � Ans:
Again substituting the value of � and P2 in equation (ix),
1 0.5 547 3 18.9 330P N� � � Ans.
Acceleration of the masses A and B
We know that the acceleration of mass A (i.e., 150 kg)
21 1. 0.25 18.9 4.72 /r m s� �� � �
www.NetB
adi.com
www.NetBadi.com

23
Similarly, 22 2 . 0.125 18.9 2.36 /r m s� �� � �
SAMPLE PROBLEMS 16.2
The thin plate ABCD of mass 8 kg is held in the position shown by the wire BH and two links AE and DF. Neglecting
the mass of the links, determine immediately after wire BH has been cut (a) the acceleration of the plate, (b)
the force in each link.
SOLUTION:
Kinematics of Motion: After wire BH has been cut, we observe that corners A and D move along parallel circles
of radius 150 mm centered, respectively, at E and F. The motion of the plate is thus a curvilinear translation; the
particles forming the plate move along parallel circles of radius 150 mm.
At the instant wire BH is cut, the velocity of the plate is zero. Thus the acceleration a�
of the mass center G of the
plate is tangent to the circular path which will be described by G.
Equations of Motion: The external forces consist of the weight W and the forces FAE
, and FDF
exerted by the links.
Since the plate is in translation, the effective farces reduce to the vector m a�
attached at G and directed along
the t axis. A free-body-diagram equation is drawn to show that the system of the external forces is equivalent
to the system of the effective forces.
a. Acceleration of the Plate.
t t effF F� � � ��
0cos30W ma�
0cos30mg ma�
0 2 0cos 30 9.81 / cos30a g m s� �
2 08.50 / 60a m s� � …. (1)
www.NetB
adi.com
www.NetBadi.com

24
30
W
G 200 mmF
F
30
30
250 mm
n
t
A B
CD
b. Forces in Links AE and DF.
0: sin 30n n eff AE DFF F F F W� � � � � ��
:G G effM M� � � �� …. (2).
0 0sin 30 250 cos30 100AE AEF m m F mm�
0 0sin 30 250 cos 30 100 0DF DFF mm F mm� � �
38.4 211.6 0AE DFF F� �
0.1815DF AEF F� � …. (3).
Substituting for FDF
from (3) into (2), we write
00.1815 sin 30 0AE AEF F W� � �
FAE
= 0.6109 W
0.1815 0.6109 0.1109DFF W W� � � �
Noting that W = mg = (8 kg) (9.81 m/s2) = 78.48 N, we have
FAE
= 0.6109 (78.48 N) FAE
= 47.9 N T
FDF
= - 0.1109 (78.48 N) FDF
= 8.70 N C.
Example 22.9: A thin uniform bar of mass m and length L is suspended from two vertical inextensible strings. If the
right hand string BD is cut find the tension in the left string AC and the angular acceleration of the bar (Fig.
22.10).
Solution: As the string BD is cut, the bar AB starts rotating about the end A. It should be noted here that the bar does
not rotate about its mass centre G.
www.NetB
adi.com
www.NetBadi.com

25
Let the angular acceleration of the bar be � then the linear acceleration of the mass centre G is 2
L� � �� �
and its
direction would be normal to the bar at G.
Forces acting on the bar are shown in the figure. 22.10.
The equations of motion can be written as
x xF ma� � : No force
x yF ma� � : mg – T = ma …………… (i)
:2
G G G
LM I T I� �� �
� � � �
As, 2
12G
m LI �
Therefore, 2
2 12
m LT L�� …………… (ii)
Eliminating T from (i) and (ii) and using 2
La
�� .
KINETICS OF RIGID BODY: FORCE AND ACCELERATION:
2 2 2 2
m L L L Lmg ma mg m
��� � � �
� � � �� � � �
3
2
g
L� �
23 2
/ 2 12 2
GI m L gT
L L L
� � �� � �
�
4
m gT � Ans:
Example 22.10: A thin uniform rod AB of length L = 1 m and mass m = 10 kg is hinged at the point C which is at a
distance of 0.25 m from the end A (Fig. 22.11). The rod is released from the horizontal position. Find (a) the
angular velocity of the rod when it has rotated through 300 (b) the reaction at the hinge.
www.NetB
adi.com
www.NetBadi.com

26
Solution: The bar AB when released rotates about the hinge C. The mass centre G rotates in a circle of radius L/4
(0.25 m). When the bar is at an angle � = 300 from the horizontal let its angular velocity be � angular
acceleration be � . Component of the linear acceleration of the mass centre G, along the bar
2
4n
La � � �
� � �
Component of the linear acceleration of the mass centre G, normal to the bar
4t
La � � �
� � �
Forces acting on the bar are (i) the weight of the bar mg (ii) reaction of the hinge on the bar having components Rn and
Rt as shown in figure 22.11.
Equation of motion of the bar can written as
: cos4
( )
t t t t
LF ma mg R ma m
Normal to the bar
�� � �
� � � � � � � ……….. (i)
2
: sin4
( )
n n n t
LF ma R mg ma m
Along the bar
��
� �� � � � � � �
� ……….. (ii)
4 12G G t G
L m LM I R I� � �
� � � �� � �� �
� �……….. (iii)
Eliminating Rt from (i) and (iii) and solving for �
24
cos4 12
L m Lm mg
L
� �� � �
� � � �
cos4 3
L Lg� �� �
� �� �
12cos
7g� �� �
16.82 cos� ��
When 030 , 14.56 / ,rad s� �� �
.d d d d
d t d d t d
� � � �� �
� �� � �
Equation (iv) can be written as
www.NetB
adi.com
www.NetBadi.com

27
16.82 cos d
d
�� �
�� �
16.82 cosd d� � � �� .
Integrating from 00 to 300
030 2
0 0
Re 216.82 cos
tan
lation cannotd d g
be used as is not cons t
�� ��
� � � ��
� ��� � �
�' ' .
230
016.82 sin
2
���
2 16.82 0.5� �
4.10 /rad s� �
To find the components of the reaction Rt and R
n, substitute of and� � in the equations (i) and (ii)
0 10 14.65cos 10 9.81 cos30
4 4t
m LR mg
��
� � � �
Kinetics of rigid body: force and acceleration:
Rt = 48.5 N
22010 4.10 1
sin 10 9.81 sin 304 4
n
m LR mg
��
� � � �
Rn = 91.1 N.
Reaction at the hinge 2 22 2 48.5 91.1t nR R R� � � �
R = 103.2 N Ans.
Angular Acceleration Produced by a torque:
In terms of moment of inertia, equation (7.18) can be written as
net I�( � ……….(7.19 a).
The vector form of the above equation is
net I�( ��� ����
……….(7.19 b).
The angular acceleration produced is along the direction of applied net external torque. The magnitude of the produced
angular velocity acceleration is directly proportional to the magnitude of the net torque and inversely proportional
to the moment of inertia of the body. The above relation looks the translational equation netF ma��� �
. Here, you
should not forget that I �( � is not an independent. It is derived from F = ma only. We can establish and
analogue between translational and rotational variables. By doing so concept developed so far for translational
motion would help to solve the problems involving rotational motion. The possible analogue is as follows.
Translational Variable/Expression Rotational Variable/Expression
(i) distance traversed, S Angle turned, �
www.NetB
adi.com
www.NetBadi.com

28
(ii) average speed, s
vt
)�) Average angular speed, w
d t
�)�
(iii) instantaneous speed, ds
vdt
� Average angular acceleration, t
��
)�
)
(iv) average acceleration, d v
ad t
� Average angular acceleration, d t
��
)�
(v) instantaneous acceleration, d v
ad t
� Instantaneous angular acceleration, d
d t
�� �
(vi) mass, m Moment of inertia I
(vii) force, F Torque, (
(viii) F = ma I�( �
(ix) linear momentum, p Angular momentum, l
(x) p = mv l I��
(xi) d p
Fd t
�d l
d t( �
(xii) conversation of linear momentum : When F = 0, p = constant. Conservation of angular momentum:When
0, l( � � constant.
(xiii) translational kinetic energy, 21
2k mv� Rotational kinetic energy
21
2k I��
(xiv) work done, .d F ds� � Work done, .d d� �� (
Angular quantities involved in analogues (ix) to (xiv) would be discussed later in this topic.
Example 11:
Find the angular acceleration of the rod given in example 4 at the moment.
a. When it is released from rest in the horizontal position;
b. When it makes an angle � with the horizontal.
Solution: After the moment when the rod is released from the rest in the horizontal position, it would rotate in the
vertical plane about a horizontal axis passing through the hinge and perpendicular the length of the rod. Initial
angular velocity of the rod is zero but due to non zero torque of gravity it has some angular acceleration and
hence, it will acquire some angular speed as it rotates. As discussed in example 4, the hinge force does not
provide any torque about the axis under consideration and the weight of the rod tries to rotate it in the clockwise
sense, i.e., it provides a torque perpendicular, inward to the plane of the paper. An approach using r F � ��
to find
the torque would also give the same result. Hence, angular acceleration of the rod,
www.NetB
adi.com
www.NetBadi.com

29
gravitynet
I I�
((� �
2
. / 2
/ 3
mg l
ml�
3
2
g
l� .
(b) When the rod makes an angle � with the horizontal, its angular acceleration.
mgnet
I I�
((� �
.mg r
I
��
2
. .cos2
2
lmg
ml
��
[from figure 7.40 (b)]
= 3
.cos2
g
l� .
Example 12:
In the previous case, find the angular velocity of the rod when it has turned through an angle � after the
moment when it was released from rest in the horizontal position. Also find the angular velocity when the rod
becomes vertical.
Solution: From the result obtained in part (b) of the previous example, at some angle� , the angular acceleration of the
rod,
3.cos
2
g
l� ��
3cos
2
d g
d t l
��� �
www.NetB
adi.com
www.NetBadi.com

30
3. cos
2
d d g
d t d t l
� ��� � [Using chain rule.]
0
3. cos .
2
gd d
l
�
� � � �� �' 0, 0at � �� �� .
2
0
0
3sin
2 2
g
l
���
�! "
� �% &% &# $
2 3sin
2 2
g
l
��� �
2 3 sing
l
��� �
When the rod becomes vertical, / 2� *� , and hence, angular velocity,,
3 /g l� � .
Example 13: In the previous example, find the hinge force on the rod at 0.� �
Solution: Just after the moment when the released from the rest in the horizontal position, it is shown in figure 7.14 (a).
Let the vertical component of the force on the rod from the hinge be R1 and the horizontal component of the
same be R2, as shown in figure. The subsequent motion of the center of mass of the rod is a nouniform circular
notice on the vertical circular path of radius l/2 with the centre at the hinge, as suggested in the figure.
Initially the rod is at rest hence radial component of the acceleration of the centre of mass of the rod, 2� r, is zero.
Hence, applying net cmF ma� along the radial direction, we get
, ,net radial cm radialF ma�
2 0R m� �
= 0
Applying the same along the tangential direction, we have,
, tan ,tannet gential cm gentialF ma�
12
lmg R m �� �
� � � � �
12
lR mg m
�� � �
www.NetB
adi.com
www.NetBadi.com

31
3
4mg mg� �
1
4mg�
Net hinge force 1 22 2
1
4R R mg� � . 2[ 0]R ��
Example 14: In the previous example, find the magnitude of the net hinge force on the when the rod has turned through
an angle � .
Solution: If � be the angular velocity of the rod when it has turned through an angle � , the centre of mass of the rod
has 2
2 2
l land� � as radial and tangential components of its acceleration, respectively, as shown in figure 7.41
(b). Applying ext cmF Ma� on the rod along the radial direction, we have,
22 sin
2
lR mg m� �� �
2
3sin sin
2R mg mg� �� � �
3 sing
l
�� �
5sin
2mg �� .
3cos
2
g
l� ��
Applying the same along the tangential direction, we have,
1cos .2
lmg R m� �� �
1 cos2
lR mg m� �� � �
3cos cos
4mg mg� �� �
1cos
4mg ��
www.NetB
adi.com
www.NetBadi.com

32
Therefore, net force on the rod from the hinge can be obtained by solving
2 21 2R R R� � .
Example 15: If the disc given in example 5 has mass M and it is free to rotated about its symmetrical axis passing
through O, find its angular acceleration.
Solution: If � be the angular acceleration of the disc, using net I�( � , we have,
net
I�
(�
2
3
/ 2
F R
MR�
6 F
MR� .
As the net torque is in clockwise sense, � has the same sense of rotation.
Example 16: A uniform disc of radius 0.l2 m and mass 5 kg is pivoted so that it rotates freely about its axis. A thin, mass
less and inextensible sting wrapped around the disc is pulled with a force of 20 N, as shown in figure 7.42(a).
(a) What is the torque exerted on the disc about its axis?
(b) What is the angular acceleration of the disc?
(c) If the disc starts from rest, what is the angular velocity after 3 s?
Solution: It is obvious that the string force gives a torque to the disc in the clockwise direction. As the torque given by
the force from the axle is zero. Net torque on the disc is,
net( = torque of the string force
= .F r�
= F. R
= (20. N). (0.12 m)
= 2.4 N – m.
As the net torque on the disc is in clockwise direction, the disc has angular acceleration in the same direction. If � be
the magnitude of the angular acceleration,
2/ 2
net net
I MR�
( (� �
2
2
2.4 2/
5 0.12rad s
�
266.66 /rad s� .
At t = 0 if the disc has zero angular velocity, then, at some time t, its angular velocity,
in t� � �� �
www.NetB
adi.com
www.NetBadi.com

33
t� �� �
� At t = 3 s,
� = 200 rad/s.
Example 17: A uniform disc of radius R and mass M is mounted on an axis supported in fixed frictionless bearing. A
light string is wrapped around the rim of the disc and a body of mass m is supported by the strings, as shown in
figure 7.43 (a).
a. Find the angular acceleration of the disc;
b. Find the magnitude of the tangential acceleration of the point on the rim where the string separates from the
rim.
c. If the system is released from rest at t = 0, find the speed of the block at some time t (> 0).
Solution: Analyze the situation according to the information provided in the figure 7.43 (b). You should also note the
following points:
· Only tension force of the siring, T, produces a torque on the disc about its centre 0. Torque of the weight of the
disc and that of the reaction force from the bearing are zero about 0.
· If � be the angular acceleration of the disc (in the clockwise direction) then the point P on the disc has a
tangential acceleration � R in the vertically downward direction at the moment shown in figure. The string
unwinds at the same acceleration and the block has the same acceleration in the vertically downward direction.
Therefore, if a be the acceleration of the block, then,
a = � R ………… (i)
Now, applying net I�( � on the disc about its symmetrical axis, we have,
net I�( �
2
. .2
M RT R �� �
2
M RT
�� �
2
MaT� � [Using (i) …………... (ii)
Using netF = ma for the block in the vertical direction, we have,
netF = ma
mg T ma� � � …………... (iii)
Adding (ii) and (iii), we get,
2
Mmg m a
� �� �� �
. // 2
ma g R
m M
� �� � � � �
.
If v be the speed of the block at some time t, then, we have,
v = u + at [ tan ]a is cons t�
= at [ 0]u ��
www.NetB
adi.com
www.NetBadi.com

34
./ 2
mg t
m M
� �� � �
Example 18: Find the acceleration of m1 and m
2 in an Atwood’s Machine, shown in figure 7.44 (a), if there is friction
present between the surface of pulley and the thread does not slip over the surface of the pulley. Moment of
inertia of the pulley about its symmetrical axis is I and its radius is R. The pulley can rotate freely about its
symmetrical axis.
Solution: Due to friction between the pulley and the thread tensions in the parts of the thread on the two sides of the
pulley are different. Let that in the right part it is T1 and that in the left part is T
2, as shown in figure 7.44
(b).Forces acting on the two blocks and the pulley are also shown in figure 7.44(b). Force on the pulley from the
support and its weight are not shown because they do not produce torque on the pulley about its symmetrical
axis of rotation. If the block m1 comes down with an acceleration a then m
2 would go up with the same
acceleration because they are connected by the same string, as shown in the same figure.7.44(b).
If we assume that the pulley gets an angular acceleration in the clockwise sense then the torque of T1 would be
positive and that of T2 would be negative, as suggested in figure 7.44(c).
Again, as any point on the rim of the pulley has a tangential acceleration � R, the block m1 comes down and the block
m2 goes w with the same acceleration, as shown in figure 7.44(d).
Therefore, we can write,
A = � R …………….. (i)
Using netF = ma for the two blocks, we have,
m1 g – T
1 = m
1 a …………….. (ii) [For m
1]
T2 – m
2 g = m
2 a …………….. (iii) [For m
2]
Using net I�( � for the pulley, we have,
+ T1. R – T
2. R = I � …………….. (iv) [� torque of support force and
weight are zero]
Substituting from (i) in (iv), we get,
1 2 2
aT T I
R� � …………….. (v)
Adding (ii), (iii) and (v), we get,
1 2 1 2 2
Im m g m m a
R
� �� � � ��
�
1 2
21 2 /
m ma g
m m I R
� ��� � � � � � �
Example 19: A thin uniform rod AB of mass m = 1.0kg moves translationally with acceleration a = 2.0 rn/s2 due to
two anti parallel force F1 and F
2 acting on it perpendicular to its length, as shown in figure 7.45. The distance
between the points at which these forces are applied is x = 20 cm. Besides, it is known that F2 = 5.0 N. Find the
length of the rod.
www.NetB
adi.com
www.NetBadi.com

35
Solution: Before analyzing the details of the given situation, let us analyze the rotational effect of two anti parallel
forces. Consider the situations shown in figure 7.45.
If we analyze the torques of the two forces about every point in their plane containing them, then, we arrive at the
conclusion that if the point lies between the lines of action of F1 and F
2 then torques of the forces about that
point add up together otherwise they are in opposite directions.
If the magnitudes of the two forces are equal then such a pair is called as a couple. If the magnitude of each force is
F and the distance between their lines of application is d, then, the net torque about any point in their plane is F.
d, asshowninfigure7.47.
O
Now, let us discuss the given case. As the rod is in pure translation motion, net torque on it about any point must be
zero. Therefore, the centre of mass of rod can not lie between the lines of action of the forces because in
that case torques produced by then about the centre of mass do not cancel each other.
Let us assume that the centre of mass of the rod lies at a distance y away from the line of action of F2 as shown in
figure 4.48. As the rod translates towards right, F2 must have a greater magnitude thanF1.
Using Fnet
= ma, we have
F2 – F
1 = ma
1 2F F ma� � �
5 1 2 N� �
= 3 N.
Again, as the net torque on the rod about C must be zero,
1 2
magnitude of the torque magnitude of the torque
produced by F about C produced by F about C�
the two torques have
opposite directions
�! "% &# $
1 2F x y F y� � �
www.NetB
adi.com
www.NetBadi.com

36
2 1 1F F F y� � �
1
2 1
Fy x
F F� �
�
320
5 3cm�
�
30 cm�
� Length of the rod, l = 2 (x + y) = 1.0 m
Example 20: A force F��
= Ai + B j is applied to a point whose radius vector relative to the origin of coordinates O is
equal to r�
= ai + bj, where a, b, A, B are constants, and I, j are the unit vectors of the x and y axes. Find the
torque (��
and the arm length l of the force F��
relative to the point O.
Solution: Torque of F��
about is
r F( � �� � ��
= (ai + bj) × (Ai + Bj)
= (aB – bA) k
Arm length of F��
with respect to O is
tan intsin
r is the dis ceof the po of application of Fl r
fromO and is the anglebetween r and F�
�
! "� % &
% &# $
��
� ��
. . sin.
r Fr r F r F
r F�
! "� �# $
� ��
� � �� � ���� ��
2 2
2 2 2 2.
aB bAa b
a b A B
�� �
� �
2 2
aB bA
A B
��
�.
Example 21: A uniform cylinder of radius R is spun about its axis to the angular velocity 0� and then placed into a
corner, as shown in figure 6.50 (a). The coefficient of kinetic friction between the corner walls and the cylinder
is equal to k. How many turns will be cylinder accomplish before it stops? Figure.
Solution: All forces acting on the cylinder are shown in figure 6.50 (b). As the cylinder rotates, its surface slips over
the corner walls and hence frictional forces acting on it, f1 and f
2, are kinetic in nature. Normal contact forces
acting on the cylinder from the corner walls, N1 and N
2, and the weight of the cylinder, mg, pass through the
centre of the cylinder and hence, these forces produce no torque about the centre C. Only frictional forces
www.NetB
adi.com
www.NetBadi.com

37
produce torque about C the torques produced by them are in opposite direction of the direction of the angular
velocity of the cylinder and hence, they retard the rotational motion of the cylinder Figure
As the cylinder does not translate, net force on in it in both vertical and horizontal directions must be zero. Therefore,
1 2N f mg� �
1 2N N mg�� � � ………….. (i) 2 2[ ]f N���
And 2 1N f�
2 2N N�� � ………….. (ii) 1 1[ ]f N���
Substituting for N2 in equation (i) from equation (ii), we have,
21 1N N mg�� �
1 21
mgN
�� �
�………….. (iii)
Substituting for N1 in equation (ii) from equation (iii), we have,
2 21
m gN
�
��
�………….. (iv)
If we define the anti clock wise sense of rotation as the + ve direction of rotation, then, the clock wise sense becomes
the – ve direction for the same. Hence, angular acceleration in the present case becomes negative for this
choice of reference direction. The angular acceleration,
2net torquedueto f about C
moment of inerita about the axis of rotation� � .
1 2
2
. .
2
f R f R
m R
�� �
1 22 N N
m R
� ��� �
1 2
2N N
m R
�� � �
2
2 1
1mg
m R
� ���
� ��
2
2 1
1
g
R
� �
�
�� �
�.
If the cylinder had the angular velocity 0� at t = 0 and at some time t it has an angular velocity � , and in this duration
it has turned through an angle � , then,
2 20 2� � ��� �
20 2
4 1
1
g
R
� �� �
�
�� �
�.
www.NetB
adi.com
www.NetBadi.com

38
If the cylinder stops having rotated through an angle 0� , then at 0 , 0� � �� � . Therefore,
2 20 02
4 10
1
g
R
� �� �
��
� ��
2 20
0
1
4 1g
� ��
� �
�� �
�
Therefore, the number of rotations accomplished by the cylinder, before it stops,
0
2n
�*
�
2 20 1
8 1
R
g
� �
* �
��
�.
Solution: Figure 13.11 along side shows the free body diagrams of the two blocks and the pulley. For vertical equilibrium
of the two blocks T – Mg = 0 or T = Mg and for vertical equilibrium of the pulley R – 2T = 0 or R = 2T = 2Mg.
Net torque on the pulley (about the axis of rotation is) � = R (0) + T (r) - T (r) = 0.
Example 2: Figure 13.12 shows a cantilever of length ‘l’ and with a uniformly distributed load w per unit length. Find
the clockwise moment about point A.
Solution: Since the distance of the each elemental length of the cantilever changes from A, so let us consider an
elemental length ‘dx’ of the cantilever at a distance of ‘x’ from the fixed end A. (figure 13.13)
The moment (clockwise) due to its weight will be dM = (wdx) x.
� Total moment can be obtained by integrating (i.e.,… summing up) the moments due to individual elemental
lengths (all being offering clockwise moments).
2
02
lwl
M w x dx� � �' .
Example 3: A force F��
= 2i – 3j + 4k acts on a particle P (2, - 1, 1). Find the moment of the force about the point Q
(1, 1, 2)
www.NetB
adi.com
www.NetBadi.com

39
Solution: ˆˆ ˆ2 3 4F i j k� � ���
The radius vector joining the point Q to P i.e., Q P��
r��
= P.V. of P – P.V of Q
= ˆ ˆ ˆ ˆ ˆ ˆ2i – j k – i j 2k� � �
ˆˆ ˆ2i j k� � �
Now, the moment of F��
about Q is given by
M r F� ��� � ��
1 2 1
2 3 4
i j k
M � � �
�
���
ˆ8 3 4 2 3 2i j k� � � � � � � �
ˆˆ ˆ11 6i j k� � � � .
Example 4: If the vector moment of force ˆˆ ˆ ,F i y j z k� � ���
acting on the point (2, 1, 5), be zero about the origin, then
evaluate ‘y’ and ‘z’.
Solution: Given ˆˆ ˆ 5r i j k� � ��
0 2 1 5
1
i j k
M
y z
� ���� �
ˆˆ ˆ5 2 5 2 1z y i z j y k� � � � � �
ˆˆ ˆ0 0 0M i j k� � ����
�
� Comparing the coefficients of 5ˆˆ &2
j k we get z � and y 1
.2
� .
13.3 Angular Momentum:
(A) For a point mass:
The angular momentum (sometimes referred to as moment) of a particle P of mass ‘m’ moving with a velocity
v�
about a point O is given by L r m v� �� � �
where r�
is the radius vector joining the point P and point O. (Fig
13.15).
www.NetB
adi.com
www.NetBadi.com

40
But, linear momentum P��
of the particle is P mv��� �
sinL r p ����
sinp r p OM�� �
Thus, the numerical value of “angular momentum” a particle is the product of its linear momentum and the perpendicular
distance of the vector P��
from point O.
The direction of L can be determined as follows: If right handed screw be rotated pointing in a direction normal to the
plane containing r and v from r� � �
towards.
13.5 Relation between torque � and
Angular momentum (L):
Torque net
d L
d t�
If , net
dL I then I I
d t
�� � �� � �
If I be constant, then net
dI I
d t
�� �� � and if � be constant, then net
d I
d t� �� .
Note: If I and � both changes simultaneously, then, it is incorrect to write.
.net
d d II
d t d t
�� �� �
13.6 Law of Conversion of Angular
Momentum:
net
dL
d t� ��
netIf �� � 0; L = constant
[� the derivative of a constant is zero]
www.NetB
adi.com
www.NetBadi.com

41
Thus, in the absence of external torque, the angular momentum of a system of particles remain constant about any
axis. This is known as “the law of conservation of angular momentum”.
Thus, if I and � be the moment of inertia and angular moment of inertia and angular momentum of a system at any
instant, about some axis, then, in the absence of external torque on the system, it can be stated that I� =
constant or 1
I��
.
Example 9: A disc rotates about its central vertical axis, with an angular velocity � . Another disc of the same mass,
but half the radius, is placed coaxially, on the rotating disc gently. Find the combined angular velocity of the two
discs:
Solution: When the smaller disc is placed on the larger rotating disc, frictional torque, retards the larger disc and
accelerates the smaller disc, until, the two discs adopt the same angular velocity ( '� say).
Since no external torque is present, so the angular momentum of the system of two discs remains constant.
1 1 2 2I I� �� �
2 2 2
. ., '2 2 8
m r m r m ri e � �
� �� �� � �
4'
5
��� � .
Example 10: If earth were to shrink to half the original radius, then what would be the duration of a day?
Solution: Let M and R be the original (present) mass and radius of earth respectively.
� Initial angular momentum 1 1 1L I ��
22 2
5 24M R
hr
*� �� �
�………….. (i)
After, the earth, shrinks, final angular momentum will be
2
2
2 2
5 2
RL M
T hr
*� �� �� � �
� �………….. (ii)
� 1 2L L�
246 .
4T hr� � �
13.7 Rotational Kinetic Energy:
Consider a body rotating about a fixed axis with an angular velocity � . Let a particle of mass ‘m’ be located at
a distance r from the axis of rotations. It’s linear velocity v will be v = � r..
� Its kinetic energy dK = 2 21 1
( ) ( )2 2
m v r�� � .
� Total kinetic energy of the body can be obtained by summing up the kinetic energies of the individual
particles, for K.E. being a scalar quantity
www.NetB
adi.com
www.NetBadi.com

42
Then 2 21
2K d K m r�� � � �
But, since � is same for all particles, so
2 22
2 2
IK m r
� �� � � .
Power delivered Work done in Rotational Motion:
21
2K I���
Differentiating w. r. t time t
12 .
2
d K dI
d t d t
��
� �� �
�
Butd K
P Powerd t
� �
dP I I
d t
�� � �
� �� � ��
�
P � ��
Now, d
P or Pdt dd t
� �� �� �
i.e., d W d� ��
integrating we get 2
1
d W d�
�� ��' ' .
If torque � is constant, then 2 1W � � �� � .
Example 11: A pulley (frictionless) of mass 2 kg and radius 8 cm, can rotate freely about a fixed horizontal axis
through the lesser angle between the two, the direction in which the screw advances yields the direction of L.
Example 5: A particle of mass m is allowed to fall freely, from the X axis at a distance + ‘a’ from the origin ‘O’ at time
t = 0. Adopting the horizontal and vertical lines through ‘O’ as X and Y axes respectively, find the angular
momentum (vectorially) of the particle at time t.
Solution: If v be the velocity of the particle at time t, then from
v u at� �� � ���
ˆ0v g j t� � ��
= - g t j
If r�
be the position vector of the particle at time t, then from
21
2s u t a t� �� � �
, we have
www.NetB
adi.com
www.NetBadi.com

43
20
1ˆ ˆ ˆ0 [ . . ]2
r a i g j t Initial PV r a i� � � � �� �
�
2
ˆ ˆ2
g ta i j� �
� Angular momentum of the particle at time t is given by L m r v� �� � �
2
ˆ ˆ ˆ2
g tm a i j g t j� �
� � �� � �
ˆm a g t k� � .
Alternatively: Magnitude of angular momentum is given by L��
= mass velocity perpendicular distance of the
point O from the line of P or v�� �
= m (gt) a.
From right and screw rule, it is obvious that the direction of L is along the negative Z axis.
ˆ.L mgat k� � ���
Example 6: A particle mass ‘m’ revolves along a circle of radius ‘r’ with a speed ‘v’ with respect to two perpendicular
lines passing through the center of the circle O, as X and Y axes. The angular displacement of the particle is 0� .
Express the following vectorially. (a) The position vector of the particle at time‘t’, (b) the velocity of the particle
at time ‘t’, (c) the angular momentum of the particle at time t.
Solution: The angular displacement � during a time t will be
vt t
t� �� �
(a) � The angle made by the radius vector OP with X axis at time 0
vt t
t�� �
www.NetB
adi.com
www.NetBadi.com

44
0 0ˆˆcos sin
v t v tr r t r t j
r r� �
! "� � � �� � � � �% &� �
� �# $
�
(b) The angle made by the velocity vector with X – axis is 02
v
t
*�� �� ��
� is
� Velocity vector
0 0ˆ ˆcos sin
2 2
v t v tv v i j
r r
* *� �
! "� � � �� � � � � �% &� �
� �# $
�
0 0ˆ ˆsin cos .
v t v tv i j
r r� �
! "� � � �� � � � �% &� �
� �# $
(c) Angular momentum L��
at time t about point O is given by L r v� �� � �
= mrv k [From (a) and (b)]
(B) For a Composite body:
Consider a composite body rotating about a fixed axis AA’, with a constant angular velocity � . (Fig. 13.18).
Let us consider a small particle of mass m, at a perpendicular distance r from the axis of rotation. Its linear
speed v will be v = � r..
� Angular momentum of the particle will be dL = mvr = 2m r� along 'A
�� A.A.
It is easy to notice that the angular momenta of all the particles is along 'A��
, A.
Rotatory Motion (Work, Power & Energy):
Rotational Kinetic Energy:
Imagine that you begin a workout session on a stationary bicycle. You apply a force with your feet on the
pedals, moving them through a displacement – you have done work. The result of this work is the spinning of
the wheel. This rotational motion represents kinetic energy because mass is in motion.
Let us model a collection of particles, such as the particles making up the wheel on our exercise bicycle, with
rigid body model. Let us assume that the body rotates about the fixed z axis with an angular speed of � .
Figure .
Each particle of the rigid body is in motion and thus has some kinetic energy.
Kinetic energy is determined by its mss and tangential speed. If the mass of the ith particle is mi and its tangential
speed is vi, the kinetic energy of this particle is
21
2i i iK m V�
Now express the total kinetic energy KR of the rotating rigid body as the sum of the kinetic energies of the individual
particles. Thus,
www.NetB
adi.com
www.NetBadi.com

45
2 2 21 1
2 2R i i i i i i
i i
K K m V m r �� � �� � �
2 2 21 1
2 2i im r I� �� �� .
Therefore, we can express the kinetic energy of the rotating rigid body as
21
2RK I ��
Although we shall commonly refer to the quantity21
2I� as the rotational kinetic energy, it is not a new form
of energy. It is ordinary kinetic energy because it was derived from a sum over individual kinetic energies of the
particles contained in the rigid body. It is a new role for kinetic energy for us, however, because we have only
considered kinetic energy associated with translation through space so far. On the storage side of the continuity
equation of energy we should now consider that the kinetic energy term should be the sum of the changes in
both translational and rotational kinetic energy. Thus, in energy versions of the system models, we should keep
in mind the possibility of rotational kinetic energy.
Check your Concept :
1. Two spheres, one hollow and one solid, are rotating with the same angular speed about their centers.
Both spheres have the same mass and radius. Which one, if either, has the higher rotational kinetic
energy?
Answer: The hollow sphere has the higher rotational kinetic energy. Its mass is located near the spherical surface,
and the mass of the solid sphere is located throughout the volume. This results in a higher moment of inertia for
the hollow sphere.
Illustration 1: Four small spheres are fastened to the corners of a frame of ineligible in the xy plane. (a) If the
rotation of the system occurs about the y axis with an angular speed � , find the rotational kinetic energy about
this axis. (b) Suppose the system rotate in xy plane about an axis through O (the z axis). Calculate the rotational
energy about this axis.
Figure.
Solution:
a. The two spheres of mass m that lie on the y axis do not contribute to Iy. Because they are modeled as particles,
ri = 0 for these spheres about this axis. We have for the tow spheres on the x axis,
2 2 2 22y i i
i
I m r Ma Ma Ma� � � ��
Therefore, the rotational kinetic energy about the y axis is
2 2 2 2 21 12
2 2R yK I Ma Ma� � �� � �
The fact that the spheres of mass do not enter into this result makes sense, because they have no
motion about the chose axis of rotation; hence, they have no kinetic energy.
b.2 2 2 2 2 22 2y i i
i
I m r Ma Ma Mb Ma Mb� � � � � ��
www.NetB
adi.com
www.NetBadi.com

46
2 2 2 2 2 21 12 2
2 2R zK I Ma Mb Ma Mb� �� � � � �
Comparing the result for (a) and (b), we see that the moment of inertia and therefore the rotational
energy associated with a given angular speed depend on the axis of rotation.
Illustration 2: A uniform rod of length L and mass M is free to rotate on a frictionless pin through
one end. The rod is released from rest in horizontal position. (a) What is the angular speed of the
rod at its lowest position? (b) Determine the tangential speed of the center of mass and the
tangential speed of the lowest point on the rod in the vertical position.
Solution: Reasoning. We consider the rod and the Earth as an isolated system. Consider the
mechanical energy of the system. When the rod is horizontal, it has no rotational kinetic energy. Let
us also define this position of the rod as representing the zero gravitational potential energy of the
system. When the center of the mass of the rod is at the lowest position, the potential energy of the
system is – Mg L/2 and the rod has rotational kinetic energy (1/2) I 2� , where I is the moment of
inertia about the pivot. Using conservation f mechanical energy, we have
i i f fK U K U� � �
1 10 0
2 2MgL MgL� � � �
2 21 1 1
2 3 2M L Mgl�� �
�� �
3 g
L� � .
13
2 2CM
Lv r g L� �� � �
The lowest point on the rod, because it is twice as far from the pivot as the center of mass, has a
tangential speed equal to
2 3CMv g L�
A rod of length L is hinged from one end. It is brought to a horizontal position and released. The angular velocity of the
rod when it is in vertical position is:
a. 2 /g L b. 3 /g L c. / 2g L d. /g L
Problem 40. A thin rod of length L and mass M is held vertically with one end on the floor and is allowed to fall. Find
the velocity of the other end when it hits the floor, assuming that the end of the floor does not slip.
Solution: Let M be the mass L the length of the stick. When it is held vertically, its centre of mass is at a higher (L/
2) from the floor, so that the potential energy of the stick is Mg (L/2). On releasing, the stick falls, i.e., it rotates
about the end on the floor and the potential energy is converted into rotational kinetic energy 21
2I� , where I is
the moment of inertia of the rod about the lower end and � the angular velocity when it hits the floor. Thus by
conservation of mechanical energy.
www.NetB
adi.com
www.NetBadi.com

47
21
2 2
LM g I��
Or,2
21
2 2 3
L M LM g ��
Or, 3 /g L� � .
If � is the linear velocity of the end hitting the floor, then
3r g L� �� � .
Problem 41: A rigid body is made of three identical thin rods, each of length L fastened together in the form of the
latter H. The body is free to rotate about a allowed to fall from rest from a position in which the plane of H is
horizontal. What is the angular speed of the body when the plane of H is vertical?
Solution: Momentum of inertia of the system about the given axis
I = IA + I
B + I
C
Now as rod is thin
20 0AI m�� �
Rod B is rotating about one end
2 / 3BI M L� .
And for rod C all points are always as distance L from the axis of rotation, so
2 2CI m L M L� � �
2 2 20 / 3 4 / 3I M L M L M L� � � � �
So if � is the desired angular speed, gain in kinetic energy due to rotation of H form horizontal to vertical position.
2 2 21 1 4
2 2 3RK I M L� �! "� � % &# $
And loss in potential energy of the system in doing so
30
2 2
LM g M g L M gL� � � � �
So by conservation of mechanical energy
(2/3) 2 2(3 / 2)M L M g L� �
Or, 3
2
g
L� � .
Problem 49: A block X f mass 0.5 kg is held by a long mass less string on a frictionless inclined plane of inclination
300 to the horizontal. The string is wound on a uniform solid cylindrical drum Y of mass 2kg and radius 2 kg and
radius 0.2 m as shown in figure. 7.77. The drum is given an initial angular velocity such the block X starts
moving up the plane. (a) Find the tension in the string during motion. (b) At a certain instant of time the
www.NetB
adi.com
www.NetBadi.com

48
magnitude of the angular velocity of Y is 10 rad s-1. Calculate the distance travelled by X from that instant of
time until it comes to rest.
Solution: (a) As X stops moving up, its acc. must be downwards along the plane. So equation of motion of X will be.
1 1sin 30 , . ,
2 2T mg ma i e T g a
� �� � � � ��
�………. (1)
Now for rotational motion of cylinder T r I� �
But as21
/2
a r and here I Mr� � �
So21 1
/ , . ., 22 2
T r M r a r i e T a � � or T = a ………. (2)
Solving Eqns. (1) and (2) for a and T we get
9.81.63
6 6 6
g ga and T N� � � � Ans:
(b) When angular velocity of Y is 10 rad\s, the linear velocity of a point on it and so of X will be
0.2 10 2 /r m s� �� � �
Now as acc. Of X is (g/6) down the plane, the distance moved by it, till it stops from 3rd equation of
motion will be
0 = 22 – 2 (g/6) s
i.e., s = (12/g) = 1.22 m
Alternative solution to part (b): When the block X moves up its translational KE and rotational KE of Y are
converted into potential energy of X. So if X moves a distance s along the plane, then by conservation of
mechanical energy,
2 21 1
2 2mgh mv I �� �
Or,2 2 21 1 1 1 1 1
22 2 2 2 2 2
g s r r� �! " ! "� � % & % &# $ # $
Or,
23 0.2 10 12
1.228
s mg
� � � Ans:
www.NetB
adi.com
www.NetBadi.com

49
A uniform rod of length L is free to rotate in a vertical plane about a fixed horizontal axis through B. The rod begins
rotating from rest from its unstable equilibrium position. When it has turned through an angle � its average
angular velocity � is given as :
a. 6
sing
L� b.
6sin
2
g
L
�
c. 6
cos2
g
L
�d.
6cos
g
L� .
� Torque 3 12I Nm� � *� � � �
303. When the rod rotates through angle � , the fall ‘h’ of centre of gravity as given by � .
/ 2cos
/ 2
L h
L�
��
Or 1 cos2
Lh �� �
� Decrease in potential energy
1 cos2
LMgh Mg �� � �
Now, KE of rotation 2
2 21 1
2 2 2
M LI� �� �
[I = ML2/3 (because rod is rotating about an axis passing through its one end)]
According to law of conservation of energy,
22
1 cos2 6
L M LMg � �� � � .
www.NetB
adi.com
www.NetBadi.com

50
Example 34: A uniform slender rod of mass M and length L is pivoted at its end. The rod is released from its
nearly vertical position. What is the reaction at the pivot when the rod reaches the horizontal position. If
the support is withdrawn at this instant, describe the subsequent motion of the rod.
n-axis
R Mg
t-axis
R
Solution: The rod undergoes non – centroidal rotation about the pivot. As shown in figure 5E. 34, we have considered
Rn and R
t as the normal and tangential components of total reaction at the support.
The equations of motion are
2
2n n
LF R M �� � � ………….. (1)
2t y
LF R M �� � � ………….. (2)
2
2 3
L M LM g� �� � � ………….. (3).
From equation (3),3
2
g
L� �
From equation (2),2
y
LR M g M �� � .
The angular velocity � of the rod can be obtained from the energy conservation principle
initial finalKE PE KE PE� � �
221 1
0 02 2 12 2 2
L M L LMg M
��
� � � �� � � �� � � � �
Or 3 / 2g� � .
On substituting the expression for � in eqn. (1) we obtain.
3
2n
M gR �
Ø When the pivot is removed the only force acting on it is gravitational force mg. This force does not have any
torque, therefore the angular acceleration of the rod vanishes. The rod will continue to rotate with angular
velocity 3 / 2g� � , as well as it will fall with acceleration due to gravity, g. Velocity of centre of mass the time
t is given by .
0V gt�� �
2
Lgt�� �
www.NetB
adi.com
www.NetBadi.com

51
3 / 2g L g t� � .
Problem 71: A composite rod of mass 2 m and length 21 comprise of two identical rods joined end to end at P.
The composite rod hinged at one of its ends is kept horizontal as shown in figure. If it is released from
rest.
a. Find, its angular speed when it becomes vertical.
b. If the lower rod gets detached with the upper rod due to centrifugal effect at their joint P, at the vertical
position of the composite rod, find their linear and angular velocities just after their separation.
Solution: Let the composite rod acquires an angular speed � at the vertical position. Its centre of mass G moves
from G1 to G
2. Therefore, the potential energy of the composite rod decreases by 2 mgh where h = l.
Applying COE
212
2I m g l� �
Where I = M.I of the composite rod about 0
22/3 8
2 23
mlm l� �
3
2
g
l�� � .
(b) Referring to adjoining figures, we can see that just at the vertical position, during the impact, the weights of the
components rods 1 and 2, the reaction knee R at the pivot and the reaction forces N at the joint of the rods,
passes through the pivot 0. Therefore these forces cannot produce any moment about O; that means the rods
do not experience any horizontal force during breaking at vertical position before the angular momentum of the
system about O remains constant just after breaking. We can also argue that the angular momentum of each
rod remains constant just before and after breaking. Because all these radial forces cannot produce any moment
about the centre of mass of the rods 1 and 2 in vertical position, therefore the linear velocities of the c. m. of the
rods remains constant..
1� ��
'2
i i
lv v
�� � (for rod 1)
2� ��
2 2
3'
2v v l�� � (for rod 2)
www.NetB
adi.com
www.NetBadi.com

52
1 2
3
2
g
l� �� � �
And 2
3 3
2 2v g l�
Problem 45: In the systems shown in figure 65, the masses of the two bodies are m1 and m
2, the coefficient of friction
between the body m1 and the horizontal plane is equal to � , and a pulley of mass m is assumd to be a uniform
to be a uniform disc. The thread does not slip over the pulley. At the moment t = 0 the body m2 starts desending.
Assuming the mass of the thread and the friction in the axle of the pulley to be negligible, calculate the work
perofmed by the frictional forces acting on the body m1 over the first t second after the beginning of the motion.
Figure
Solution: Free body diagram is shown in figure 66. If a and � represent the linear and angular acceleration respectively,,
then equations of motion for linear and rotational motions are given by:
1 1 1T m g m a�� � ………. (1)
2 2 2m g T m a� � ………. (2)
2 1T T R I�� � ………. (3)
Adding equation (1) and (2), we get figure
1 2 2 1 1 2T T m g m g m m a�� � � � �
Or2 1
2 1 1 11 2
2/
2
m m gm g m g I R m m a or a
m m m
�� �
�� � � � �
� �
21[ / ]
2a R and I m R� � �
� � � �
�
Suppose the mass m2 falls through height h, hence
22 1 2 12
1 2 1 2
2 21 1
2 2 2 2
m m gt m mh at and v at gt
m m m m m m
� �� �� � � �
� � � �
According to law of conservation of energy : 2 2 2
2 1 1 2 2
1 1 1
2 2 2frictionm gh m v m v I W�� � � �
Also, 1 2v v v R at�� � � �
2 2 2 2 2 2 2 22 2
1 1 1/ 2 /
2 2 2fm gh a t m a t m R a t R W� � � � �
Or, 4m2 gh = (2m
2 + 2m
1 + m) a2 t2 + W
f
22 1 2 2
2 2 1
1 2
4 2 22
f
m m gtW m g m m m a t
m m m
��� � � � �
� �
22 2 22 1 2 1
2
1 2 1 2
44
2 2
m m gt m m a tm g
m m m m m m
� �� �� �
� � � �
2 22 1 2 2 1 2 1 12 2
1 2 1 2
44
2 2
m m m m m g t m m mg t
m m m m m m
� � � �! "� � � �� �% &
� � � �% &# $
www.NetB
adi.com
www.NetBadi.com

53
Work and Energy in Rotational Motion:
In translational motion, we found energhy concepts, and in particular the reductin of the continuity equation for energy
called the work – kinetic energy theorem, to be extremely useful in describing the motion of of a system.
Energy concepts can be equally useful in simplifying the analysis of rotational motion, as we saw in the isolated
system analysis in Example 10.5. From the continuity equation for energy, we expect that for rotation of an
object about a fixed axis, the work done by external forces n the object will equal the change in the rotational
kinetic energy, as along as energy is not sotred by any other means. To show that this is in fact the case, we
begin by finding an expression for the work done by a torque.
Consider a rigid body pivoted at the point O in Figure 10.21. Suppose a single external force F is applied at the
point P and ds is the displacement of the point of applicaton of the force. The small amount of work dW done
by F as the point of application rotates through an infinitesimal distance ds = r d� in a time dt is
. sindE F ds F � � �� �
Where F sin � is the tangential component of F, or the component of the force along the displacement . Note from
figure 10.21 that the radial component of F does no work because it is perpendiucalr to the displacement.
Because the magnitude of the torque due to F about the origin is defined as sinF� � , we can write the work
done for the infinitesimal rotation in the form
dW � �� .
Notice that this is the product of torque and angular displacement, making it analogous to the work done in translational
motion, which is the product of force and translational displacement (Eq. 6.2)
Now, we will combine this result with the rotational form f Newton’s second law, I� �� . Using the chain rule
from the calculus, we can express the torque as
d d dI I I
d d t d
� � �� � �
� �� � �
Rearranging this expression and noting that d� � = dW from equation 10.28, we have
d d W I d� � � �� �
Integrating this expression, we find the total work done by the torque.
2 21 1
2 2
f f
i i
iE d I d I f I� �
� �� � � � � �� � � �' '
Notice that this equation, which can be written as W = ) KR
, has exactly the same mathematical form as the work –
kinetic energy theorem for translation.
We finish this discussion of energy concepts for rotation by inverstigating the rate at which work is being done
by F on object rotating about a fixed axis. This rate is obtained by dividing the left and right sides of Equation
10.28 by dt::
d W d
d t d t
���
www.NetB
adi.com
www.NetBadi.com

54
The quantity dW/dt is, by definition, the instantaneous power p delivered by the force. Furthermore, because
/d d t� �� . Equation 10.30 reduces to
d Wp
d t� �� � .
This expression is analogous to p = F� in the case of translational motion.
Problem 36: Point masses M1 and M
2 are placed at the opposite ends of a rigid rod of length L and of
negligible mass. The rod is to be set rotating about an axis perpendiucalr to it. Find the position on this
rod through which the axis should pass in order that the work required to set the rod rotating with
angular velocity 0� should be minimum.
Solution:2
1 2 0
10
2t FK E K E I I �� � �
So by work – energy – theorem:
21 2 0
1
2F IW K E K E I I �� � � �
Or,2 2
1 2 0
1
2W M x M L x �! "� � �# $
For W to be minimum
1 20 . ., 2 2 0d W
i e M x M L xd x
� � � �
So, 2 1 2/x M L M M� � .
This is the position of centre of mass of the rod from M1.
So the required work is minimum when the rod is
rotating about an axis through its centre of mass and perpendicular to the length of the rod.
Example 10.11: Work n an Atwodd Machine:
Consider the Atwood machine of Example 10.10 . Calculate the rate at which work is done on the system of the
pulley and the hanging objects by the gravitational force.
Reasoning : The only means by which energy enters the system is by work done by the gravitational force. The only
types of energy in the system are translational and rotational kinetic energy. Thus, we can apply the reduction
of the continuity equation called the work – kinetic energy theorem, W = ) K. The rate at which work is being
done on the system is equal to the rate at which the kinetic energy of the system is changing, so well evaluate
the power as P = dK/dt.
Solution: Because the acceleration of the hanging objects in Example 10.10 is constant, we can find the speed of either
object at time t by using equation 2.8. If the objects start from rest, the speed of either at time t is
www.NetB
adi.com
www.NetBadi.com

55
1 21
1 2
1
2
f
m mv v at gt
m m M
� �� �
� � � � � � �� �
Using equation 10.10, the angular speed of the pulley at time t is
1 2
1 2
1
1
2
f
f
v m mgt
R Rm m M
�
� �� �
� � � � � �� �
Thus, the kinetic energy of the system is
2 2 21 2 2
1 1 1
2 2 2system fK m vt m v f I f�� � �
2
2 21 21 2
1 2
1
12
2
m mm m g t
m m M
� �� �
� � � � � �� �
2
2 2 21 2
2
1 2
1 1 1
12 2
2
m mMIt g t
R m m M
� �� �� �
� � � � � � ��
�
2
2 21 21 2
1 2
1 1
12 2
2
m mm m M g t
m m M
� �� �� �
� � � � � � � � ��
�
.
2
1 2 2 2
1 2
1
12
2
m mg t
m m M
��
� � .
Finally, we differentiate this expression with respect to time
2
1 2 2 2
1 2
1
12
2
systemd K m mdP g t
d t d tm m M
! "% &�
� � % &% &� �% &# $
2
1 2 2
1 2
1
2
m mg t
m m M
��
� � .
Thus, the power increases with time, because the angular speed increases in time.
Exercise: The wheel in Figure 10.22 is a solid disk with M = 2.00 kg, R = 30.0 cm, and l = 0.0900 kg. m2. The
suspended object has mass m = 0.500 kg. If the suspended object starts from rest and descends to a point 1.00
m lower what is its speed at this point?
Answer : 2.56 m/s.
www.NetB
adi.com
www.NetBadi.com

56
www.NetB
adi.com
www.NetBadi.com

57
ROLLING MOTION
\
Consider the rotational motion of a wheel about a fixed axis at centre as shown in Fig. 1
Suppose the angular velocity of the wheel is [omegal. The corresponding linear velocity of any point on the rim of the
wheel is given by cmv R�� where R is the radius of the wheel (see Figure 1).
We shall investigate the special case of rotational motion in which a round object rolls on a surface. Many everyday
examples exist for such motion, including automobile tires rolling on roads.
We make a rather odd, but valid, simplification model here for rolling objects. The surfaces must exert friction forces
on each other; otherwise the wheel would simply slide rather than roll. If the friction force on the wheel is large
enough, the wheel rolls without slipping. In this situation, the friction force is static rather than kinetic because
the contact point of the wheel with the surface is at rest relative to the surface at any instant. The static friction
force acts through no displacement, so that it does no work on the wheel and causes no decrease in mechanical
energy of the wheel. In real rolling objects, deformations of the surfaces results in some rolling resistance. If
both surfaces are hard, however, they will deform very little, and rolling resistance can be negligibly small. Thus,
we can model the rolling motion as maintaining constant mechanical energy. The wheel is a great invention!
A wheel rolling over a surface has both a linear and a rotational velocity. When the wheel is in contact with the ground,
its bottom part is at rest with respect to the ground. This implies that besides a rotational motion the wheel
experiences a linear motion with a velocity equal to + vcm
(see Figure 2). We conclude that the top of the wheel
moves twice as fast as the center and the bottom of the wheel does not move at all.
Figure 2. Motion of wheel is sum of rotational and translational motion.
An alternative way of looking at the motion of a wheel is by regarding it as a pure rotation (with the same angular
velocity [omega]) about an instantaneous stationary axis through the bottom of the wheel (point P, Figure 3).
Uniform Pure Rolling :
www.NetB
adi.com
www.NetBadi.com

58
Pure rolling means no relative motion (or no slipping) at point of contact between two bathes.
For example, consider a disc of radius R moving with linear velocity v and angular velocity � on a horizontal ground.
The disc is said to be moving without slipping if velocities of points P and Q (shown in figure b) are equal, i.e.,
vP
= VQ
Or, 0v R�� �
Or, v = R� .
If vP > v
Q or v > R� , the motion is said to be forward slipping and if v
P < v
Q < or v R� . The motiom is said the
backward slipping (or sometimes called forward English).
Thus, v = R� is the condition of pure rolling on a stationary ground. Sometimes it is simply said rolling.
00
Suppose the base over which the disc in rolling, is also moving with some velocity (say v0) then in that case cnditon of
pure rolling is different.
For example, in the above figure,
vP = v
Q
Or, v - R� = v0
Thus, in this case 0,v R�� � but 0v R v�� � .By uniform pure rolling we mean that v and � are constant. They are
neither increasing nor decreasing.
In case of pure rolling on a stationary horizontal ground, following points are important to note.
1. Distance moved by the center of mass of the rigid body in one full rotation is 2* R.
v
s=2 R
This can be shown as under:
2. 2s v T R R
*� *
�� �
� � �� �
In forward slipping 2s R as v R* �� �
www.NetB
adi.com
www.NetBadi.com

59
And in backward slipping 2s R as v R* �� � .
2. Instantaneous axis of rotation (IAOR) passes through the bottomost point, as it is a point of zero velocity. Thus,
the combined motion of rotation and translation can be assumed to be pure rotational motion about bottommost
point with same angular.speed � .
3. The speed of a point on the circumference of the body at the instant shown in figure is 2v sin 2 sin . . .,2 2
or R i e� �
�
2 sin 2 sin2 2
P Pv v v R� �
�� � ��
.
This can be shown by following two methods.
Method 1:
P C PCv v v� �� � �
2 2 02 . cos 180Pv v v v v �� � � �
�
2 sin2
v�
� .
Method 2:
P
c
pv OP ���
Here, 2 sin2
OP R�
�
www.NetB
adi.com
www.NetBadi.com

60
2 sin2
pv R�
�� �� � �
�
2 sin2
R�
� � �� �
�
2 sin2
v�
� .
4. From point number (3) we can see that
00 0Av as �� �
02 90Bv v as �� �
And 02 180Cv v as �� �
5. The path of a point on circumference is a cycloid and the distance moved by this point in one full rotation is 8R.
In the figure, the dotted line is a cycloid and the distance A1 A
2 …….. A
5 is 8 R. This can be proved
as under. In figure 6.70 t� ��
According to point (3), speed f point (3), speed of point A at this moment is,
2 sin2
A
tv R
�� � �
� � �
Distance moved by it in time dt is,
2 sin2
A
tds v d t R d t
�� � �
� � � �
.
Therefore, total distance moved in one full rotation is,
www.NetB
adi.com
www.NetBadi.com

61
2
0
T
s d s*�
� '
Or,2
02 sin
2
T ts R d t
* ��
� � �� �
�'On integration we get, s = 8R.
Example 6.18: A disc of radius R start at time t = 0 moving along the positive x axis with linear speed v and
angular speed � . Find the x and y co – ordinates of the bottommost point at any time t.
�
Solution: At time t the bottommost point will rotate an angle � = t� with respect to the centre of the disc C. The
centre C will travel a distance s = vt. In the figure, PQ = R sin sin sinPQ R R t� �� � and
cos cosCQ R R t� �� � . Coordinates of point P at time t are,
sinx OM PQ vt R t�� � � � and cosy CM CQ R R t�� � � �
, sin , cosx y v t R t R R t� �� � � �
Illustration 1: A point P is fixed on a wheel rolling on a rough horizontal plane. The point P describes
(a) stragith line (b) cycloid
(c) hyperbola (d) parabola.
Illustration in figure 4.
Illustration 2: A sphere of mass m and r shown in figure 5. slips on a rough horizontal plane. It has velocity v0 at any
instant and rotational velocity v0 /2r about the centre. Its velocity when it starts pure rolling is
0
2
v
r� � .
a. 0
5
7v b. 0
6
7v c. 0
4
7v d. 0
3
7v .
www.NetB
adi.com
www.NetBadi.com

62
Solution: (b) Let Ff be frictional force
02
5
2 2
5
f f fF t F r Fv v
m m rm r
�� � � �
00
5
2 2
fF tvt
r m r� � �� � � �
005
2 2
f
f
F v vv m
r m r F
�� �
0 00 0
65 73
2 2 2 7
v vr v v v v v or v� � � � � � � .
Instantaneous Axis of Rotation:
The combined effects of translation of the centre of mass and rotation about an axis through the centre of mass
are equivalent to a pure rotation with the same angular speed about an axis passing through a point of zero
velocity. Such an axis is called the instantaneous axis of rotation. (IAOR). This axis is always perpendicular to
the plane used to represent the motion and the intersection of the axis with this plane defines the location of
instantaneous centre of zero velocity (IC).
For example consider a wheel which rolls without slipping. In this case the point of contact with the ground has
zero velocity. Hence, this point represents the IC for the wheel. If it is imagined that the wheel is momentarily
pinned at this point, the velocity of any point on the wheel can be found using v r� . Here r is the distance of the
point toni IC. Similarly, the kinetic energy of the body can be assumed to be pure rotational about IA OR or,
21
2IAORK I ��
Rotation + Translation � Pure rotation about IAOR passing through IC
2 2 21 1 1. .
2 2 2cm cm IAORK mv I K E I� �� � � �
Note:
1. Although the IC may be conveniently used to determine the velocity of any point in a body, it generally
does not have zero acceleration and therefore, it should not be used for finding the acceleration of any
www.NetB
adi.com
www.NetBadi.com

63
point in the body.
2. When a body is subjected to general plane motion, the point determined as the instantaneous centre of
zero velocity for the body can only be used for an instant of time. Since the body changes its position
from one instant to the next then for each position of the body a unique instantaneous centre must be
determined. The locus of piont which defines the IC during the body’s motion is valid a centrode, Thus,
each point on the centrode acts as the IC forth body only for an instant of time.
Location of the IC:
If the location of the IC is unknown, it may be determined by using the fact that the relative position vector
extending from the IC to a point is always perpendicular to the velocity of the point. Following three possibilities
exist.
(i) Given the velocity of a point (normally the centre of mass) on the body and the angular velocity of the
body.
If v and � are known, the IC is located along the line drawn perpendiucalr to v�
at P, such that the distance from P to
IC is, v
r�
� . Note that IC lie on that side of P which causes rotation about the IC, which is consistent with the
direction of motion casued by and v��� �
.
Exapmple 6.16: A rotating disc moves in the positive direction of the x – axis. Find the equation y (x)
describing the postion of the instantaneous axis of rotation if at the initial moment the centre c of the
disc was located at the point O after which it moved with constant velocity v while the disc started
rotating counterclockwise with a constant angular acceleration � . The initial angular velocity is equal
to zero.
Solution:x
tv
� andx
tv
�� �� �
The position of IOAR will be at a distance
vy
��
Or,
vy
x
v
��
www.NetB
adi.com
www.NetBadi.com

64
Or,
2vy
x��
Or,
2vx y
�� = constant.
This is the desired x – y equation. This equation represents a rectangular hyperbola.
y
O vc x
yIC
x
(ii) Given the lines of ation of two non – parallel velocities :
Consider the body shown in figure where the line of action of the velocities A Bv and v� �
are known. Draw perpendicular
at A and B to these lines of action. The point of intersection of these perpendicular as shown locates the iC at
the instant considered.
(iii) Given the magnitude and direction of two parallel velocities:
When the velocities of points A and B are parallel and have known magnitudes vA and v
B then the location of the IC
is determined by proportional triangles as shown in figure.
In both the cases, ,A
A IC
vr
�� and ,
BB IC
vr
��
In fig. (a) , ,A IC B ICr r d� � and in fig. (b) , ,B IC A ICr r d� �
As a special case, if the body is translating, vA = v
B and the IC would be located at infinity, in which case 0� � .
Example 6.17: A unform thin rod of mass m and length l is standing on a smooth horizontal surface. A slight
disturbance causes the lower end to slip on the smooth surface and the rod starts falling. Find the
velocity of centre of mass of the rod at the instant when it makes an angle � with horizontal.www.N
etBadi.c
om
www.NetBadi.com

65
Soltuion: As the floor is smooth, mechanical energy of the rod will remain conserved. Further, no horizontal force acts
on the rod, hence the centre of mass moves vertically downwards in a straight line. Thus velocities of COM and
the lower end B are in the directions shown in figure. The location of IC at this instant can be found by drawing
perpendicular to C Bv and v� �
at respective points. Now, the rod may be assumed to be in pure rotational motion
about IAOR passing through IC with angular speed� .
Applying conservation energy. Decrease in gravitational potential energy of the rod = increase in rotational
kinetic energy about IOAP.
21
2IAORmgh I ��
Or
2 22 21
1 sin cos2 2 12 4
l ml mlmg � � �
� �� � �� �
�.
Solving this equation, we get
2
12 1 sin
1 3 cos
g
l
��
�
��
�
Now, cos2
el
v � �� ��� �
�
2
2
3 1 sin cos
1 3cos
g l � �
�
��
� .
Accelerated Pure Rolling:
So far we were discussing the uniform pure rolling in which v and� were constants. Now, suppose an external
force is applied to the rigid body, the motion will no longer remain uniform. The condition of pure rolling on a
stationary ground is,
v = R� .
Differentiating this equation with respect to time we have
.d v d
Rd t d t
��
Or, a R�� .
www.NetB
adi.com
www.NetBadi.com

66
Thus, in addition to v R � at every instant oftime, linear acceleration = R angular acceleration or a = R� for
pure rolling to take place. Here, friction plays an important role in maintaining the pure rolling. The ffiction may
sometimes act in forward direction, sometimes in backward direction or under certain conditions it may be zero.
Here, we should not forget the basic nature of friction, which is a self adjusting force (upto a certain maximum
limit) and which has a tendency to stop the relative motion between two bodies in contact. Let us take an
example illusnting the above theory.
Suppose a force F is applied at the topmost point of a rigid body of radius R, mass M and moment of inertia I
about an axis passing through the centre of mass. Now, the applied force F can produce by itself;
(i) a linear acceleration a and
(ii) an angular acceleration � .
If a = R� , then there is no need of friction and force of friction f = 0. if a < R� , then to support the linear motion the
force of friction f will act in forward direction. Similarly, if a > R� , then to support the angular motion the force
of friction will act in backward direction. So, in this case forces of friction will be either backward, forward
even zero also.
It all depends on M, I and R. For calculation you can choose any direction of friction. Let we assume it in forward
direction,
Let, a = linear acceleration, � = angular acceleration ………… (i)
Then, netF F fa
M M
�� � ………… (ii)
For pure rolling to take place, cF f R
I I
��
�� � ………… (iii)
a R��
Solving eqs. (i), (ii) and (iii), we get
2
2.
MR If F
MR I
��
� ………… (iv)
From eq. (iv) following conclusions can be drawn
(i) If I = MR2 (e.g., in case of a ring)
F = 0
i.e., if a force F is applied on the top of a ring, the force of friction will be zero and the rign will roll without slipping.
(ii) If I < MR2, (e.g., in case of of a solid sphere or a hollow sphere), f is positive i.e., force of friction
will be forward.
(iii) If I > MR2, f is negative i.e, force of friction will be backwards. Although under no condition I >
www.NetB
adi.com
www.NetBadi.com

67
MR2. (Think why?). So force of friction is either in forward direction or zero.
Here, it should be noted that the force of friction f obtained in Eq. (iv) should be less than the
limiting friction ( � Mg), for pure rolling to take place. Further, we saw that if I < MR2 force of
friction acts in forward direction. This is because � is more if I is small I
��� ���
� i.e., to support the
linear motion force of friction is in forward direction.
Note: It is ofter said that rolling firciton is less than the sliding friction. This is because the force of friction calculated
by equation number (iv) normally comes less than the sliding friction N� � and even sometimes it is in
forward direction i.e., it supports the motion.
There are certain situations in which the direction of friction is fixed. For example in the following situations the force
of friction is backward.
Rough
Rolling on Rough Inclined Plane:
As we said earlier also, force of friction in this case will be backward. Equations of motion are:
sinM g fa
M
� �� …………. (i)
f R
I� � …………. (ii)
For pure rolling to take place,
A = R�
Solving Eqs. (i), (ii) and (iii), we get …………. (iii)
2
sin
1
M gf
M R
I
��
� …………. (iv)
And 2
sin
1
ga
I
M R
��
� …………. (v)
From eq. (v), we can see that if a solid sphere and a hollow sphere of same mass and radius are released from a rough
inclined plane the solid sphere reaches the bottom first because:
solid hollow solid hollowI I Or a a� �
www.NetB
adi.com
www.NetBadi.com

68
solid hollowt t� �
Further, the force of friction calculated in Eq. (iv) for pure rolling to take place should be less than or equal to the
maximum friction cosM g� �
Or,2
sincos
1
M gM g
M R
I
�� ��
�
Or,2
tan
1M R
I
�� �
� .
1. The equation xt I�� �� does not hold good in a non – inertial frame. However, there exists a very special case
when xt I�� �� does hold even if the angular acceleration � is measured from a non – inertial frame. That
special case is, when the axis of rotation passes through the centre of mass and otherwise the pseudo forces
produce a psedo torque about the axis. This is the reason, in above examples we calculated the angular acceleration
� about an axis passing through the centre of mass and perpendicular to the plane of motion of the particles.
Because about that axis we can apply xt
I
��� � .
2. Work done by friction in pure rolling on a stationary ground in zero as the point of application of the force is at
rest. Therefore, mechanical energy can be conserved if all other dissipative forces are ignored.
3. In accelerated pure rolling the velocity of the bottommost point is zero but despite the relation a = R� , the
acceleration of the bottommost point is not zero. Because acceleration of any point P can be given as
P c pca a a� �� � �
. Here, pca�
has two components: Tangential acceleration ta r�� (which is perpendicular to CP)
and radial or normal acceleration 2na r�� (which is along PC). Thus, P c pc pc
t na a a a� � �� � � �
. For the
bottommost point, 0c pct
a a� �� �
. As ca a��
and (in forward direction) pct
a R���
(in backward direction).
But 0.pcc
a ��
It is 2R� towards centre. Thus, acceleration of bottommost point is 2
R� towards
centre. Similarly in the problems like shown in figure 6.79, it is wrong ot say that acceleration of
point P is equal to acceleration of block A. Althrough we can write. Aa a r�� � . In case of pure
rolling, problems can also be solved by using the energy
conservation principle (provided no other dissipative forces are
present). So, in this case we will write the energy equation as,
Decrease in gravitational potential energy of A = increase in kinetic
energy of A (only translational) + increase in kinetic energy of spool
(both rotational as well as translational).
www.NetB
adi.com
www.NetBadi.com

69
4. In case where pulley is having some mass and friction is sufficient enough to prevent slipping, the tension on
two sides of the puelly will be different and rotational motion of the pulley is also to be considered.
5. At a given instant the value of � for a rigid body will be same for every point.
6. The torque equation I� �� can be applied by about two points. These are,
a. Centre of mass
b. Point about which body is in pure rotation.
7. sina g �� if surface is smooth
sin cosa g g� � �� � is surface is rough but friction is insufficient to prevent
Slipping. (forward slipping will take place).
2
sin
1 /
ga
I MR
��
�is pure rolling is taking place, i.e., friction is sufficient to
prevent slipping.
Example 6.20: Consider the arrangement shown in figure. The string is wrapped around a uniform cylinder
which rolls without slipping. The other end of the string is passed over a massless, frictionless pulley to
a falling weight. Determine the acceleration of the falling mass m in terms of only the mass of the
cylinder M, the mass m and g.
Solution: Let T be the tension in the string and f the force of (static) friction, between the cylinder and the surface a1
= acceleration of centre of mass of cylinder towards right
a2 = downward acceleration of block m; � = angular acceleration of cylinder (clockwise) equations of motion are:
For block, 2mg T ma� � ………. (i)
For cylinder, 1T f Ma� � ………. (ii)
21
2
T f R
M R
��
�………. (iii)
www.NetB
adi.com
www.NetBadi.com

70
1 2
The string attaches the mass m to the highest point of the cylinder, hence
m COMv v R�� � ………… (iv)
Differentiating we get 2 1a a R�� �
We also have (for rolling without slipping) 1a R�� ………… (v)
Solving these equations, we get 2
8
3 8
m ga
M m�
� Ans:
Kinetice Energy :
Figure 3. Motion of wheel around axis through P.
The kinetic enrgy of the wheel shown in figure 12.3 can be calculated easily using the formula
21
2PK I �� .
Where IP is the rotational inertia around the axis through P, and [omega] is the rotational velocity of the wheel. The
rotational inertia around an axis thorugh P, IP, is releated to the rotational inertia around an axis thorugh the
center of mass, Icm
.
2P cmI I M R� �
The kinetic energy of the wheel can now be rewritten as
2 2 2 21 1 1
2 2 2cm cm cmK I M R I M v� �� � � �
Where the first term is the kinetic energy associated with the rotation of the wheel about an axis through its center of
mass and the second term is associated with the translational motion of the wheel.
6. 1R
T
K
K� for a ring
1
2� for a disc
2
5� for a solid sphere
2
3� for a hollow sphere etc.
www.NetB
adi.com
www.NetBadi.com

71
Here, KR stands of rotational kinetic energy
21
2I�� �
�� �
and KT for translational kinetic energy
21
2mv
� ���
�. For example,
for a disc:
22 2 21 1 1 1 1
2 2 2 4 2R T
vK I m R mv and K mv
R� � �� �
� � � �� � � �
1
2
R
T
K
K� .
Illustration – 1: Figure 12.4 shows a disk with mass M and rotational inertia I on an inclined plane. The mass is
released from a height h. What is tis final velocity at the bottom of the plane?
The disk is released from rest. Its total mechanical energy at that point is equal to its potential energy
iE M g h�
When the disk reaches the bottom of the plane, all of its potential energy is converted into kinetic energy. The kinetic
energy of the disk will consist out of rotational and translational kinetic energy:
2 21 1
2 2rE K I M v�� � �
The moment of inertia of the disk is given by
21
2I M R�
Where R is the radius of the disk. The kinetic energy of the disk can now be rewritten as
2 2 2 21 1 1 3
2 2 2 4rE M R M v M v�� �� � ��
�
Conservation of mechanical energy implies that Ei = E
f , or
23
4M g h M v�
This shows that the velocity of the disk is given by
Consider now two different disks with identical mass M but different moments of inertia. In this case the final kinetic
energy can be written as
2 2 2
2 2
1 1 1 1 1
2 2 2rE v M v M v
R R
� �� � � ��
�
Conservation of energy now requires that
2
2
1 1
2M v M g h
R
� �� ��
�.
Or,2
2
2
1
g hv M R
M R�
�
We conclude that in this case, the disk with the smallest moment of inertia has the largest final velocity.
www.NetB
adi.com
www.NetBadi.com

72
Illustration – 2: A small solid marble of mass m and radis r rolls without slipping along a loop – the loop track shown
in Figure 12.5, having been released from rest somewhere along the straight section of the track. From what
minimum height above the bottom of the track mus the marble be released in order not to leave the track at the
top of the loop.
The marble will not leave the track at the top of the loop if the centripetal force exceeds the gravitational force at that
point:
2vm m g
R� .
Or, 2v g R�
The kinetic energy of the marble at the top consists out of rotational and translational energy
2 2 2
2
1 1 1
2 2 2r
IK I M v M v
r� � �
� � � �� �
Where we assumed that the marble is rolling over the track (no slipping). The moment of inertia of the marble is given
by
22
5I M r�
Using this expression we obtain for the kinetic energy
2 21 2 7
2 5 10rK M M v M v
� �� � ��
�
The marble will reach the top if
27 7
10 10rK M v M g R� �
The total mechanical energy of the marble at the top of the loop – the – loop is equal to
27 7 272 2
10 10 10r r rE K U mv m g R m g R m g R m g R� � � � � � �
The initial energy of the marble is just its potential energy at a height h
Ei = m g h
Conservation of energy now implies that
27
10m g h m g R� or
27
10h R�
Example 6.20: Consider the arrangement shown in figure. The string is wrapped around do a uniform cylinder
which rolls without slipping. The other end of the string is passed over a massless, frictionless pulley to
a falling weight. Determine the acceleration of the falling mass m in terms of only the mass of the
cylinder M, the mass m and g.
www.NetB
adi.com
www.NetBadi.com

73
Solution: Let T be the tension in the string and f the force of (static) friction, between the cylinder and the surface a1
= acceleration of centre of mass of cylinder towards right
Alternate Slution (Energy Method):
Since there is no slipping at a contacts mechanical energy of the system will remain conserved.
� Decrease in gravitational potential energy of block m in time t = increase in translational kinetic enrgy of block +
increase in rotational as well as translational kinetic energy of cylinder.
2 2 22 1
1 1 1
2 2 2m g h m v I M v�� � � �
Or,2 2 22 2
2 2 1
1 1 1 1 1
2 2 2 2 2m g a t m a t M R t M a t�� � � �
� � �� � � �
……… (vi)
Solving Eqs. (iv), (v) and (vi), we get the same result
The angular impulse of a torque in a given time interval is defined as 2
1d t�'
�
. Here, ��
is the
resultant torque acting on the body. Further, since
d Ld t d L
d t� �� � �
��� � ��
2
1 21
d t angular impulse L L� � � �'� �� ��
.
Thus, the angular impulse of the resultant torque is equal to the change in angular momentum. Let us take few
examples based on the angular impulse.
Example 6.21: A uniform sphere of mass m and radius R starts rolling without slipping down on inclined plane.
Find the time dependence of the angular momentum of the sphere relative to the point of contact at the
initial moment. How will the result be affected in the case of a perfectly smooth inclined plane? The
angle of inclination of the plane is � .
Solution: Applying the equation:
Angular impulse = change in angular momentum about point of contact we have,
d t L� � )'� ��
Or, sinL m g Rt�� Ans:
There will be no change in the result, as the torque of force of friction in the first case is zero about point of contact.
So, it hardly matters whether the surface is rough or smooth.
www.NetB
adi.com
www.NetBadi.com

74
Example 6.22: A spherical ball of radius r and mass m collides with a plank of mass M kept on a smooth
horizontal surface. Before impact, the centre of the ball has a velocity v0 and angular velocity 0� as
shown. The normal velocity is reversed with same magnitude and the ball stops rotating after the impact.
Find the distance on the plank between first two impacts of the ball. The coefficient of friction between
the ball and the plank is � . Assume that plank is large enough.
Solution: The forces during impact are shown in the figure 6.89:
Let the horizontal velocities of the ball and the plank be v1 and v
2 in opposite directions as shown in figure 6.90. From
conservation of linear momentum in horizontal direction
mv1 = Mv
2………… (i)
Linear impulse of the ball in vertical direction = change in linear momentum in vertical direction. (J = N dt).
Hence, J = 2mv0
………… (ii)
Linear impulse on the ball in horizontal direction = change in linear momentum in horizontal
direction. ………… (iii)
� 1J mv� �
Angular impulse on the ball about COM = change in angular momentum about COM,
�2
0 0
2. .
5J r I mr� � �� �
Solving Eqs. (i), (ii), (iii) and (iv), we get
1 0 2 0
2 2
5 5
mv r and v r
M� �� �
� � � �
Now, actual path of the ball is a projectile whose time of flight will be
02 2yv v
Tg g
� �
Relative velocity of ball with respect to plank in horizontal direction is
1 2 1 0
2
5r
M m M mv v v v r
M M�
� �� � � �� � � �� �
� �
Therefore, the desired distance is
www.NetB
adi.com
www.NetBadi.com

75
0 04
5r
v rM ms v T or s
M g
��� �� � �
�
25. A sphere cannot roll on
a. smooth horizontal surface.
b. rough horizontal surface.
c. rough inclined plane.
d. somooth incline plane.
Solution: d. Minimum coefficient of friction required is 2
tan7
� .
26. A smooth inclined plane is fixed in a car accelerating at a = tan � . If the sphere is set pure rolling on
the incline then
a. it will continue rolling b. it will slip down
c. its linear velocity will increase d. its linear velocity will decrease.
Solution: (a) It will continue rolling because incline and sphere are at rest with respect to car.
27. A sphere starts rolling down an incline plane of inclination � . The speed of its centre when it has
covered a distnac l
a. 2 sing l � b. 5
sin7
g l � c. 10
sin7
g l � d. 15
sin7
g l � .
Solution: (c) 5
2 2 g sin7
v a s l �� �
10sin
7g l ��
sin 5sin
2 71
5
ga g
��� �
� .
28. A small solid sphere of radius r rolls down an incline without slipping which ends into a vertical loop
of radius R. Find the height above the base so that it just loops the loop
a. 5
2R b.
5
2R r� c.
25
10R r� d.
27 17
10 10
rR � .
Solution: (d) The minimum velocity at P, top of the loop should be v g R r� �
2 21 12
2 2m g h mv I m g R r�� � � �
www.NetB
adi.com
www.NetBadi.com

76
21 1 22 2
2 2 5m g R r m R r m g R r�� �� � � � � ��
�
72 27 17
10 10
m gm g R r m g R r R r� � � � � �
Or, 1
27 1710
h R r� � .
29. A sphere is rolling down an inclined plane without slipping. The ratio of rotational kinetic energy to
total kinetic energy is
a. 5
7b.
2
5c.
2
7d. none of these.
Solution: (c)
22
2 2 2
21
252 .1 1 7 7
2 2 5
rot
tot
mvIK E
K Emv I mv
�
�� � �
�
EXAMPLE 2: A spool of thread of mass m is placed on an inclined smooth plane set at an angle � to the
horizontal. The free end of the thread is attached to the wall as shown in figure. Calculate the acceleration
of the centre of mass of the spool, if its moment of inertia about its axis is I and the radius of the wound
thread layer is r.
Solution: sinm g T
am
� �� ………. (i)
T r
I� � ………. (ii)
a r�� ………. (iii)
Solving these three equations, we get
www.NetB
adi.com
www.NetBadi.com

77
2
sin
1
ga
I
m r
��
� .
Example – 8: A solid ball rolls down a parabolic path ABC from a height h as shown in figure. Portion AB of
the path is rough while BC is smooth. How high will the ball climb in BC?
[Hint: In case of pure rolling mechanical energy is conserved]
Solution: At B, total kinetic energy = mgh
Here, m = mass of ball
The ratio of rotational to translational kinetic energy would be,
2
5
R
T
K
K�
�2 5
7 7R TK m g h and K m g h� � .
In protion BC, friction is absent. Therefore, rotational kinetic enrgy will remain constant and translational kinetic
energy will convert into potential energy. Hence, if H be the height to which ball climbs in BC, then
mgH = KT
Or,5 5
7 7m g H m g h or H h� � Ans.
Example 9: A solid is wound around two discs on either sides. The pulley and the two discs have the same mass
and radius. There is no slipping at the pulley and no friction at the hinge. Find out the accelerations of
the two discs and the angular acceleration of the pulley.www.NetB
adi.com
www.NetBadi.com

78
Solution: Let R be the radius of the discs and T1 and T
2 be the tensions in the left and right segments of the rope.
Acceleration of disc 1,
11
m g Ta
m
�� ……….. (i)
Acceleration of disc 2,
22
m g Ta
m
�� ……….. (ii)
Angular acceleration of disc 1,
1 11
2
2
1
2
T R T
I m Rm R
�� � � �
……….. (iii)
Similarly, angular acceleration of disc 2
2
22
T
m R� � ………… (iv)
Both 1 2and� � are clockwise. Angular acceleration of pulley,,
2 1 2 1
2
2
1
2
T T R T T
m Rm R
�� �
� �………… (v)
For no slipping, 1 1 2 2R a a R R� � �� � � � ………… (vi).
Alternate Solution:
As both the disc are in identical situation, T1 = T
2 and � = 0 i.e., each of the discs falls independently and
identically. Therefore, this is exactly similar to the problem shown in figure.
Example – 10: A thin massless thread is wound on a reel of mass 3 kg and moment of inertia 0.6 kg – m2. The
hub radius is R = 10 cm and peripheral radius is 2R = 20 cm. The reel is placed on a rough table and the
friction is enough to prevent slipping. Find the acceleration of the centre of reel and of hanging mass of
1 kg.
www.NetB
adi.com
www.NetBadi.com

79
Solution: Let, a1 = acceleration of centre of mass of reel
a2 = acceleration of 1 kg block
� = angular accelartion of reel (clockwise)
T = tension in the string
f = force of friction.
And Free body diagram of reel is as shown below: (only horizontal forces are shown). Equations of motion are:
3T f a� � ………….. (i)
2 . 0.2 0.1
0.6 3 6
f R T R f T f T
I I
��
� �� � � � � ……… (ii).
a
T
t
Free body diagram of mass is:
Equation of motion is: 10 – T = a2
……….. (iii)
For no slipping condition,
1 12 0.2a R or a� �� � ………… (iv)
And 2 1 2 10.1a a R or a a� �� � � ………… (v)
Solving the above five equations we get,
21 0.27 /a m s�
And 22 0.135 /a m s� .
Example 11: A sphere of mass 10 kg is placed on the inclined surface of a rough wedge of inclination 300. If
the mass of the wedge is also 10 kg, calculate the acceleration of the wedge when sphere is allowed to
roll down without slipping. Neglect friction between ground and wedge. Take g = 10 m/s2.
www.NetB
adi.com
www.NetBadi.com

80
Solution: Let a = acceleration of wedge towards left.
ar = acceleration of centre of mass of sphere down the plane relative to wedge.
� = angular acceleration of the sphere.
f = force of friction between the sphere and the wedge.
Free body diagram of wedge with respect to ground is as shown in figure 6.118.
Equation of motion will be, N 0 0sin 30 cos 30f ma� �
Or,3
102 2
N fa� �
Or, 3 20N f a� � ……. (i)
Pseudo force = ma
mg sin30
y
x
Free body diagram of sphere releative to wedge is as shown in figure 6.119.
Equation of motion are, (m = 10 kg)
x rF m a� �
Or, 0 0sin 30 cos 30 rmg ma f ma� � �
Or, 50 5 3 10 ra f a� � � …. (ii)
0yF� � ,
Or, N + ma sin 300 = mg cos 300
Or, 5 50 3N a� � ….. (iii)
2
.
2 4
5
f R f
I Rm R
�� � � �
…… (iv)
For no slipping between the wedge and the sphere
ra R�� ……. (v)
Solving the above five equations, we get a = 2.11 m/s2 Ans.
www.NetB
adi.com
www.NetBadi.com

81
Example – 12: Detemine the maximum horizontal force F that may be applied to the plank of mass m for mass
m for which the solid sphere does not slip as it begins to roll on the plank. The sphere has a mass M
radius R. The coefficient of static and kinetic energy friction between the sphere and the plank are
s kand� � respectively..
Solution: The free body diagrams of the sphere and the plank are as shown below:
Writing equations of motion:
For sphere: Linear acceleration 1s
s
M ga g
M
��� � …………. (i)
Angular acceleration 2
5
2 2
5
s sM g g
RM R
� �� � �
…………. (ii)
For plank : Linear acceleration 2sF M g
am
��� …………. (iii)
For no slipping : 2 1a a R�� � …………. (iv)
Sloving the above four equations we get,7
2sF g M m� � �
� �� �
Thus, maximum value of F can be 7
2s g M m� � �
�� �
Ans:
Example 13: A solid sphere of radius r gently placed on a rough horizontal ground with an initial angular
speed 0� and no linear velocity. If the coefficient of friction is � , find the time t when the slipping stops.
In addition, state the linear velocity v and angular velocity � at the end of slipping.
Solution: Let m be the mass of the sphere.
Since, it is a case of backward slipping; force of friction is in forward direction. Limiting friction will act in this case.
Linear acceleration f m g
a gm m
��� � �
www.NetB
adi.com
www.NetBadi.com

82
Angular retardation 2
. 5
2 2
5
f r g
I rm r
� �� � � �
Slipping is ceased when. v r��
Or, 0at r t� �� �
Or, 0
5
2
g tg t r
r
�� �� �
� �� �
Or, 0
7
2g t r� ��
02
7
rt
g
��
� � Ans.
0
2
7v at g t r� �� � � Ans.
And 0
2
7
vr
r� �� � Ans.
Alternate Solution:
Net torque on the sphere about the bottommost point is zero. Therefore, angular momentum of the sphere will
remain conserved about the bottommost point.
i fL L�
0I I m r v� �� � �
Or,2 2
0
2 2
5 5m r m r m r r� � �� �
0 0
2 2
7 7and v r r� � � �� � � � Ans:
Example 14: A billiard ball, initially at rest, is given a sharp impulse by a cue. The cue is held horizontally a
distance h above the centre line as shown in figure. The ball leaves the cue with a speed v0 and because
of its forward English (backward slipping) eventually acquires a final speed 0
9
7v . Show that
4
5h R�
Where R is the radius of the ball.
Solution: Let 0� be the angular speed of the ball just after it leaves the cue. The maximum friction acts in forward
direction till the slipping continues. Let v be the linear speed and � the angular speed when slipping is ceased.
www.NetB
adi.com
www.NetBadi.com

83
vv R or
R� �� � �
Given, 0
9
7v v� ………. (i)
09
7
v
R�� � ………. (ii)
Applying, Linear impulse = change in linear momentum
0F d t m v� � ………. (iii)
Angular impulse = change in angular momentum
� 0d t I� ��
Or,2
0
2
5F h d t m R �� ………. (iv)
Angular momentum about bottommost point will remain conserved.
i.e., i fL L�
or, 0 0I m R v I m Rv� �� � �
�2 2 0
0 0 0
2 2 9 9
5 5 7 7
vm R m R v m R m R v
R� � �
� � �� �
………. (v).
Solving Eqs. (iii), (iv) and (v) we get,
4
5h R� . Proved.
Example 15: A uniform sphere of radius r starts rolling down without slipping from the top of another sphere of
radius R. Find the angular velcotiy of the sphere after it leaves the surface of the larger sphere.
Solution: The equation of motion for the centre of the sphere at the moment of breaking off:
2
cosmv
m gR r
���
………….. (i)
Where v is the velocity of the centre of the sphere at that moment and � is the corresponding angle. The velocity v
can be found from the energy conservation law:
www.NetB
adi.com
www.NetBadi.com

84
R
R
2 2
2 2
mv Im g h
�� �
Where22, 1 cos
5I m r v r and h R r� �� � � � �
From these equations we obtain
2
10
17
g R r
r�
�� . Ans:
Example 16: A fixed wedges has two semicircular tracks of radius R1 and R
2 (R
1 = 2R
2). The track of radius R
1
is frictionless. A small block of mass m is held on the top of the larger track. A spherical ball of radius
r (< < R2) is held on the top of the other track. Both the block and the ball are released simultaneously.
Firction in the track containing the ball is large enough to avoid slipping of the ball.
a. Which of the two will reach the bottom of the track first?
b. For what ratio 1
2
R
R will both of them simultaneously reach the bottom of their respective tracks?
Solution: For block:
12 cosv g R� ��
Or, 1 12 cosd
R g Rd t
��
� �� ��
�
1
2
cos
d gd t
R
�
�
�� �
Or,01 0
0 /21
2
cos
g dd t d t
R *
�
�
��' '
Or,00
11
/22 cos
R dt
g *
�
�
�� ' ………. (i)
For ball:21 5 2
2 7 5
R
T
Kmv E as
K
� �� ��
�
Here E = total mechanical energy = mgh, where h = gR2 cos �
210cos
7v g R� �� �
Or proceeding in the similar manner
www.NetB
adi.com
www.NetBadi.com

85
002
2/2
7
10 cos
R dt
g *
�
�
�� ' ………… (ii)
From Eqs. (i) and (ii) we see that
1
2
10
7
t
t� (for R
1= 2R
2)
Or t1 > t
2
i.e., the ball will reach first.
(b) From Eqs. (i) and (ii), t1 = t
2
When1 27
2 10
R R�
Or1 7
2 5
R� Ans:
A rectangular rigid fixed block has a long horizontal edge. A solid homogeneous cylinder of radius r is placed horizontally
at rest with its length prependicular to the edge such that the axis of cylinder and the edge of the block are in the
same vertical plan. There is sufficient friction present at the edge so that a very small displacement causes the
cylinder to roll off the edge without slipping. Find the angle � through which the cylinder rotates before it leaves
contact with the edge and the speed of the COM of the cylinder before leaving contact with the edge.
Solution: Let the cylinder rotate by an angle � about the edge. Its COM will go down by
h = r (1 – cos � )
Conserve energy
2 2 21 1 31 cos
2 2 4m g r mv I mv� �� � � �
For circular motion of cylinder
2
cosmv
N m gr
�� �
For cylinder to leave contact N = 0www.NetB
adi.com
www.NetBadi.com

86
2 4cos 1 cos
3
vg g
r� �� � �
7 4cos
3 3g g� �
14 4cos cos
7 7� � � � �� � �
�
4cos
7v r g r g�� � .
34. A uniform disc of mass m and radius r is rolling down a rough inclined plane of inclination 300. The
coefficient of static and dynamic friction each = � and the only forces acting are gravitational and
frictional. The magnitude of the frictional force acting on the disc is
solution: 21
2fF R MR �� �
� � �
sin 2 1sin ,
1 3 21
2
f
ga g F m a
��� � �
�
Thus,01
sin 303 6
f
m gF m g � �� � �� .
38. A uniform cylinder of mass m rests on two horizontal planks. A thread is wound on the cylinder. The hanging end
of the thread is pulled vertically down with a constant force F as shown in Fig. 10.47. Find the maximum value
of F which will not bring about sliding of the cylinder. Coefficient of friction is �
Figure
Solution: 1 2f fF F ma� �
1 2N N Mg F� � �
2
1 22
f f
m r aF r F F r
r
� �� � � �
�
For pure rolling a
r� � and 1 2 1 2f fF F N N�� � �
Solving these equations max
3 2.
2 3 2 3
m g m gF or F
� �� �
� �� �
28. A carpet of mass M made of inextensible material is rolled along its length in the form of a cylinder of
radius R and is kept on a rough floor. The carpet starts unrolling without sliding on the floor whe a
negligibly small push is given to it. The horizontal velocity of the axis of cylindrical part of the carpet
when its radius reduces to 2
R is
a. g R b. 7
5g R c.
8
3g R d.
14
3g R .
www.NetB
adi.com
www.NetBadi.com

87
. . . . . .
. . .
Loss in Gain in Gain in
Gravitational Rotational Translatoinal
P E of K E of K E of
C M C M C M
� � � � � �� � � � � � � � � � �� � � � � � � � � � � �
2 21 1' ' ' '
2 2cmM g R M g R I M v�� �
� � � �� �
2'2' &
2 4 4
R R l Mwhere R M R l
* ** �
+ ,- -� � � �. /- -0 1
2
'2 27 1 1 1'
8 2 2 ' 2 4
cmcm
V MM g R M R v
R
� �� �� � � �� � � � � � �
� � � �
2 27 1
8 2 8 8cm cm
M MM g R v v
� � � �� � �� �
� �
27 3
8 8 2cm
MM g R v
� � � �� �� �
� �
14
3cmv g R� �
29. A uniform ball of radius R rolls down from the top of a sphere of radius 2R without slipping. If � is the
angle made by the ball with the vertical at point of breaking off then
a. 1 10
tan17
� � � �� �
�b.
1 17tan
10� � � �� �
�
c. 1 10
cos17
� � � �� � �
d. 1 10
cos17
� � � �� � �
.
30. In PROBLEM 29, the velocity of ball at the point of breaking off is
a. 10
17g R b.
20
17g R
c. 30
17g R d.
40
17g R
Let the ball leave contact with the surface of the sphere at the point P. Radius of the circular path of ball is 3R. The
forces acting on the ball are
a. Normal reaction N acting radiallyl outwards.
www.NetB
adi.com
www.NetBadi.com

88
b. Weight mg acting vertically downwards.
2
cos3
mvm g N
R� � �
When the ball leaves contact with the sphere. We have N = 0.
2
cos3
mvm g N
R�� � �
2 3 cosv R g �� � ………… (i)
Further total energy possessed by this rolling sphere is the sum of translational kinetic energy and rotational kinetic
energy i.e.,
22 2 2
2
1 1 11
2 2 2
kE mv I m v
R�
� �� � � �� �
�
21 21
2 5E m v
� �� � ��
�
21 21
2 5E m v
� �� � ��
�
27
10E mv� � ………… (2)
73 cos
10E m R g �� �
21cos
10E m g R �� � ………… (3)
Further by Law of Convervation of Energy
Loss in Gain in Translational
Potential Kinetic Energy plus
Energy gain in Rotational
Kinetic Energy
� ��
� � � � � �� � � � �
� �
21cos
10m g h m g R ��
21cos 3 3 cos
10m g R m g R R� �� � �
21cos 3 1 cos
10m g R m g R� �� � �
21cos 3 1 cos
10� �� � �
7cos 1 cos
10� �� � �
www.NetB
adi.com
www.NetBadi.com

89
7cos 1 1
10� � �
� � �� �
10cos
17��
From PROBLEM 29, we get
2 3 cosv R g ��
2 103
17v R g
� �� � �
30
17v g R� � .
18. A spherical body of radius ‘R’ rolls on a horizontal surface with linear velocity ‘v’. Let L1 and L
2 be the
magnitudes of angular momenta of the body about centre of mass and point of contact ‘P’. Then
a. L2 = 2L
1 if radius of gyration K = R
b. L2 = 2L
1 for all cases
c. L2 > 2L
1 if radius of gyration K < R
d. L2 > 2L
1 if radius of gyration K > R.
�
Solution: (A), (D)
21L I M K� �� � ………… (1)
2L I M Rv�� �
2M K M R R as v R� � �� � �
2 2M K R�� � ………… (2)
From equation (1) and (2), we can see that
L2 = 2L
1
When K = R and 2 12L L� when K > R.
Paragraph type:
Using the following paragraph, solve Q. 20 to 23.
In an experiment by Prof. Verma on pure rolling, a solid sphere and a hollow sphere of equal mass and radius
are palced over a rough horizontal surface after rotating it about its mass centre with same angular velocity 0� .
Once the pure rolling starts let v1 and v
2 be the linear speeds of their centres of mass
20. Then.
www.NetB
adi.com
www.NetBadi.com

90
a. v1 = v
2b. v
1 > v
2c. v
1 < v
2d. data is insufficient .
solution : (C)
From conservation of angular momentum about point of contact:
0I I m Rv� �� �
Or, 0
vI I m R v
R� � � �
v
v = R
Or,
0Iv
Im r
R
��
�
Or,
0vI m R
R I
��
�
Now, solid sphere hollowI I�
solid hollowv v� �
1 2v v� �
21. Let t1 and t
2 be the times when pure rolling of solid sphere and of hollow sphere is started. Then
a. 1 2t t� b. 1 2t t� c. 1 2t t� d. None of these.
Solution: (B) Friction force ' '� mg acts in forward direction till pure rolling is started. Hence linear acceleration .
m ga g
m
���
� v = at
Or,
0
1
1
vt
m Rag
R
�
�� �
� ��� �
Again solid hollowI I�
solid hollowt t� �
Or, t1 < t
2
22. Which of the following quantity has same magnitude for the solid sphere at start and when it start
pure rolling.
a. kinetic energy
b. momentum
c. angular momentum about CM
www.NetB
adi.com
www.NetBadi.com

91
d. angular momentum about bottom most point
Solution: (D) Clearly, angular momentum about the bottom most point is conserved, since the net torque about that
point is zero.
23. Now solid sphere and hollow sphere’s centre are joined through a light rigid rod and placed on a highly
rough inclined plane, what type of force will be present in rod?
a. Tensile b. Compressive
c. Impulsive d. Bidirectional.
Solution: (B)
Motion of both the object is rolling.
sin sin,
2 21 1
5 3
solid hollow
g ga a
� �� �
� �
solid hollowa a� �
Hence force will be compressive.
www.NetB
adi.com
www.NetBadi.com