
Applications of Linear and Nonlinear Robustness Analysis Techniques to the F/A-18 Flight Control

IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999 571
Robustness Design of Nonlinear DynamicSystems via Fuzzy Linear Control
Bor-Sen Chen,Senior Member, IEEE,Chung-Shi Tseng, and Huey-Jian Uang
Abstract—This study introduces a fuzzy linear control designmethod for nonlinear systems with optimalH1 robustness per-formance. First, the Takagi and Sugeno fuzzy linear model isemployed to approximate a nonlinear system. Next, based on thefuzzy linear model, a fuzzy controller is developed to stabilizethe nonlinear system, and at the same time the effect of externaldisturbance on control performance is attenuated to a minimumlevel. Thus based on the fuzzy linear model,H1 performancedesign can be achieved in nonlinear control systems. In theproposed fuzzy linear control method, the fuzzy linear modelprovides rough control to approximate the nonlinear controlsystem, while theH1 scheme provides precise control to achievethe optimal robustness performance. Linear matrix inequality(LMI) techniques are employed to solve this robust fuzzy controlproblem. In the case that state variables are unavailable, a fuzzyobserver-basedH1 control is also proposed to achieve a robustoptimization design for nonlinear systems. A simulation exampleis given to illustrate the performance of the proposed designmethod.
Index Terms—H1 robust control, linear matrix inequality,nonlinear fuzzy observer, Takagi–Sugeno fuzzy control.
I. INTRODUCTION
T HE control design of nonlinear systems is a difficultprocess, and in practical control systems the plants are
always nonlinear. Thus many nonlinear control methods havebeen developed for nonlinear systems to overcome the dif-ficulty in controller design for real systems. However, inthese control system designs, the nonlinear systems must havesome predictable behaviors. For example, the system mustbe minimum-phase, it must be sufficiently smooth, and theparameters must be exactly known in order for the feedbacklinearization method to be applied. Furthermore, these controlschemes are so complicated that they are not suitable forpractical application.
Recently, the nonlinear control schemes [19], [20]have been introduced to deal with the robust performancedesign problem of nonlinear systems. However, the designerhas to solve a Hamilton–Jacobi equation, which is a nonlinearpartial differential equation. Only some very special nonlinearsystems have a closed-form solution. In general, conventionalnonlinear control schemes are not suitable for practicalcontrol system design.
Manuscript received July 8, 1998; revised July 8, 1999. This work wassupported by the National Science Council under Contract NSC 88-2213-E-007-069.
The authors are with the Department of Electrical Engineering, NationalTsing Hua University, 30043, Hsin Chu, Taiwan, R.O.C.
Publisher Item Identifier S 1063-6706(99)08729-9.
In the past few years, there has been rapidly growinginterest in fuzzy control of nonlinear systems, and there havebeen many successful applications. Despite the success, it hasbecome evident that many basic issues remain to be addressed.The most important issue for fuzzy control systems is how toget a system design with the guarantee of stability and controlperformance, and recently there have been significant researchefforts on the issue of stability in fuzzy control systems [2], [5],[6], [22]–[24]. In [6], an approach was given for the stabilityof fuzzy design issues of nonlinear systems. In other studies, anonlinear plant was approximated by a Takagi–Sugeno fuzzylinear model [1], and then a model-based fuzzy control wasdeveloped to stabilize the Takagi–Sugeno fuzzy linear model.They all ignore the approximation error between nonlinear sys-tem and fuzzy model. In practice, the effect of approximationerror will deteriorate the stability and control performance ofthe nonlinear systems. Therefore, the stability and control per-formance of nonlinear control systems still need further study.
Recently, based on feedback linearization technique, adap-tive neural network or fuzzy control schemes have beenintroduced to deal with nonlinear systems [7]. In [7], eventhough the tracking performance has been guaranteed,the complicated parameter update law and control algorithmmake this control scheme impractical, especially in the case ofconsidering the projection algorithm for the parameter updatelaw to avoid the singularity of feedback linearization control.
For practical control design, a simple fuzzy control designwith guaranteed control performance is more appealing fornonlinear systems. In this work, the fuzzy linear model ofTakagi and Sugeno is used to approximate a nonlinear system.Then, a hybrid fuzzy controller is introduced to stabilize thenonlinear system, and at the same time eliminate the effectsof external disturbance below a prescribed level, so that adesired control performance can be guaranteed. In thisapproach only a linear fuzzy control design is used, withoutcomplicated feedback linearization or parameter update lawas in [7], [13], and [28], although, the same controlperformance is achieved. Finally, a fuzzy control design withrobustness optimization is also introduced based on the optimal
control scheme by minimizing the attenuation level.This proposed method attempts to combine the fuzzy linearmodel and performance to obtain a simple but practicalalgorithm for robust performance control design of nonlinearsystems. If the state cannot be directly measured, a fuzzyobserver-based control design is developed. This situation ismore complex because a fuzzy observer must be designed toachieve the optimal performance.
1063–6706/99$10.00 1999 IEEE

572 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999
To deal with this fuzzy observer-based control design,it needs to simultaneously solve multiple quadratic matrixinequalities. These quadratic matrix inequalities can be trans-formed to equivalent linear matrix inequalities (LMI’s), andthese LMI’s are combined into a standard LMI problem(LMIP). This standard LMIP can be solved to completethe optimal fuzzy control design. Finally, the optimal
design of fuzzy control system is formulated as a so-called eigenvalue problem (EVP) to minimize the maximumeigenvalue of a matrix that depends on a variable, subject tothe LMI constraints.
The main contribution of this paper is twofold: i) robustdesign of nonlinear systems is dealt with via a fuzzy observer-based linear controller and ii) both the stability of the fuzzyobserver-based control system and the optimal attenua-tion of the effect of the external disturbance on the controlperformance are guaranteed.
A simulation example is provided to illustrate the designprocedure and performance of the proposed methods. In theproposed hybrid fuzzy control method, the fuzzy linear methodprovides rough tuning to approximate the nonlinear controlsystem, while the optimal scheme provides precise tuningto achieve an optimal robustness performance. The simulationresults show that the optimal robustness performance can beachieved by the proposed method.
The paper is organized as follows: the problem descriptionis presented in Section II. Robust stabilization and optimal
performance design via fuzzy linear control are de-scribed in Section III. In Section IV, a fuzzy observer-based
control with robustness optimization is introduced. InSection V, a simulation example is provided to demonstratethe effectiveness of fuzzy control design and to confirmthe robust performance. Finally, concluding remarks are madein Section VI. Note that this paper is a modified version ofthe conference paper in [26].
II. PROBLEM DESCRIPTION
Consider the following nonlinear system:
(1)
where
denotes the state vector,
denotes the control input,
denotes the unknown disturbances with a known upper bound, and and depend on .
Definition 1 [17]: The solutions of a dynamic system aresaid to be uniformly ultimately bounded (UUB) if there existpositive constants and , and for every there isa positive constant , such that
A fuzzy dynamic model has been proposed by Takagi andSugeno [1] to represent local linear input/output relations ofnonlinear systems. This fuzzy linear model is described byfuzzy If–Then rules and will be employed here to deal withthe control design problem of the nonlinear system (1). Theth rule of this fuzzy model for the nonlinear system (1) is of
the following form [1], [2], [6]:
Plant Rule :
If is and and is
Then (2)
for where is the fuzzy set, ,, is the number of If–Then rules, and ,
are the premise variables.The overall fuzzy system is inferred as follows [1], [6],
[16]:
(3)
where
and is the grade of membership of in .In this paper, we assume
for and
for all . Therefore, we get [2], [6]
(4)
for and
(5)
Therefore, from (1) we get
(6)

CHEN et al.: ROBUSTNESS DESIGN OF NONLINEAR DYNAMIC SYSTEMS VIA FUZZY LINEAR CONTROL 573
where
denotes the approximation error between the nonlinear system(1) and the fuzzy model (3).
Suppose the following fuzzy controller is employed to dealwith the above control system design:
Control Rule :
If is and and is
Then (7)
for . Hence, the overall fuzzy controller isgiven by
(8)
where is defined in (4) and (5) and are the controlparameters (for ).
Substituting (8) into (6) yields the closed-loop nonlinearcontrol system as follows:
(9)
where
(10)
and
(11)
Suppose that there exist bounding matrices andsuch that
(12)
and
(13)
for all trajectory and the bounding matrices andcan be described by
(14)
where and , for [15].Remark 1:
1) If we assume and
then the plant rule can be represented as
Plant Rule :
If is and and is
Then (15)
2) Obviously, according to assumption above
and
are the worst case representations for the approximationerror if there exist andsuch that (12) and (13) hold for some and
(for ).
According to assumption above, we get
(16)

574 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999
and
(17)
i.e., the approximation error in the closed-loop nonlinear sys-tem is bounded by the specified structured bounding matrices
and .Stability is the most important issue in the control systems.
Obviously, it is appealing for control engineers to specifycontrol parameters in the fuzzy controller (8) such thatthe stability for the closed-loop nonlinear system (9) can beguaranteed
In this study, we assume that is unknown but bounded.However, the effect of will deteriorate the control perfor-mance of fuzzy control system. Therefore, how to eliminatethe effect of to guarantee the control performance is animportant issue in the control systems. Since control isthe most important control design to efficiently eliminate theeffect of on the control system, it will be employed todeal with the robust performance control in (9). Let us considerthe following control performance [7], [13]:
(18)
or
(19)
where denotes the terminal time of the control, is aprescribed value which denotes the worst case effect of
on , and is a positive-definite weighting matrix. Thephysical meaning of (19) is that the effect of onmust be attenuated below a desired levelfrom the viewpointof energy, no matter what is, i.e., the gain fromto must be equal to or less than a prescribed value.In general, is chosen as a positive small value less thanfor attenuation of .
The inequality in (19) can be seen as bounded-disturbanceand bounded-state but with a prescribed gain. If the ini-tial condition is also considered, the inequality (19) can bemodified as
(20)
where is some symmetric positive-definite weighting matrix.From the analysis above, the design purpose of the proposed
fuzzy control system is to specify a linear fuzzy control (8)such that both the stability of fuzzy linear control systemand the control performance in (20) with a prescribedattenuation level are guaranteed.
The robustness optimization is to achieve a minimumin(20) to obtain maximum elimination of the effect of . Fornonlinear system (1), this design problem is how to specifya stabilizable fuzzy control in (8) to minimize subject tothe constraint (20).
III. CONTROL DESIGN VIA FUZZY LINEAR CONTROL
From the description in the above section, the designpurpose of this study is how to specify a fuzzy linear controllaw in (8) for the nonlinear system in (9) with the guaranteed
control performance in (20).Let us choose a Lyapunov function for the system (9) as
(21)
where the weighting matrix .The time derivative of is
(22)
By substituting (9) into (22), we get

CHEN et al.: ROBUSTNESS DESIGN OF NONLINEAR DYNAMIC SYSTEMS VIA FUZZY LINEAR CONTROL 575
(23)
Then, we get the following result.Theorem 1: If the fuzzy controller (8) is employed in the
nonlinear system (1) and there exists a positive-definite matrixsuch that the following matrix inequalities:
(24)
are satisfied for then the closed-loopnonlinear system (9) is UUB and the control performanceof (20) is guaranteed for a prescribed.
Proof: From (23), we get
(25)
From (24), we get
(26)
From (25) and (26), we get
(27)
From the properties of in (4) and (5), the aboveinequality can imply the following inequality:
(28)
Since , we get
(29)
where (the minimal eigenvalue of ).Whenever , . According to
a standard Lyapunov extension [21], [25], this demonstratesthat the trajectories of the closed-loop system (9) are UUB.
Integrating (28) from to yields
(30)
From (21), we get
(31)
This is (20) and the control performance is achievedwith a prescribed .
Corollary 1: In the case of , if the fuzzy controller(8) is employed in the closed-loop nonlinear system (9) andthere exists a positive-definite matrix such thatthe matrix inequalities in (24) are satisfied, then the closed-loop system (9) is quadratically stable.
Proof: In the case of , from (28) we get

576 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999
Therefore, the closed-loop system (9) is quadratically stable.This completes the proof.
In general, it is not easy to analytically determine a commonsolution for (24). Furthermore, the solutionmay not be unique. Fortunately, (24) can be reformulated intothe linear matrix inequality problem (LMIP) [15]. The LMIPcan be solved in a computationally efficient manner using atechnique such as the interior point method. First, the matrixinequalities in (24) are transformed to the equivalent LMI’sby the following procedures.
By introducing new variables and ,(24) is equivalent to the following matrix inequalities:
(32)
By the Schur complements [15], (32) is equivalent to thefollowing LMI’s:
(33)
for , .If the LMI’s in (33) have a positive-definite solution for, then the closed-loop system is stable and the control
performance in (20) is guaranteed for a prescribed.Therefore, the optimization design for fuzzy control
system of (1) is formulated as the following constrainedoptimization problem:
minimize
subject to and (33) (34)
This problem is also called eigenvalue problem (EVP) and canbe solved very efficiently by convex optimization algorithm.More details will be discussed in the next section.
IV. FUZZY OBSERVER-BASED CONTROL
In the previous sections, we assumed that all the statevariables are available. In practice, this assumption often doesnot hold. In this situation, we need to estimate state vectorfrom output for state feedback control. Suppose the nonlinearsystem to be controlled is of the following form:
(35)
where denotes the output of the system.The th rule of the fuzzy model for the nonlinear system
(35) is of the following form:
Plant Rule :
If is and and is
Then
(36)
for where .
The state dynamic of fuzzy system is the same as (3) andthe output of the fuzzy system is inferred as follows:
(37)
Therefore, the output of the nonlinear system in (35) can berearranged as the following equivalent system:
(38)
where
(39)
denotes the approximation error between the output of nonlin-ear uncertain system (35) and the fuzzy output (37).
Suppose the following fuzzy linear observer is proposed todeal with the state estimation of nonlinear system (1):
Observer Rule:
If is and and is
Then (40)
where and are the observerparameters (for ).
The overall fuzzy observer can be defined as follows:
(41)
Remark 2: In this situation, the estimated state variablesmay be specified as the premise variables, i.e., .
Suppose the following fuzzy controller is employed to dealwith the above control system design:
Control Rule :
If is and and is
Then (42)
Hence, the overall fuzzy controller is given by
(43)
where are the control parameters (for ).Let us denote the estimation errors as
(44)

CHEN et al.: ROBUSTNESS DESIGN OF NONLINEAR DYNAMIC SYSTEMS VIA FUZZY LINEAR CONTROL 577
By differentiating (44), we get
(45)
where is defined as (39), is the same as (10), andis modified as
Assume that a bounding matrix exists wheresuch that
(46)
for all trajectories.Then, the augmented system is equivalent to the following
form:
(47)
After manipulation, (47) can be expressed as the followingform:
(48)
Let us denote
(49)
Therefore, the augmented system defined in (48) can beexpressed as the following form:
(50)
where
(51)
where and
(52)
where for and

578 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999
(53)
where for .Therefore, the control performance can be modified as
follows:
(54)
where denotes the terminal time of the control, is aprescribed value which denotes the worst case effect ofon , and and are some positive-definite weightingmatrix.
Define the Lyapunov for the augmented system in (50)as
(55)
The time derivative of is
(56)
Then we get the following result.Theorem 2: Suppose the fuzzy control law (43) is employed
in the nonlinear system (50), and is the commonsolution of the following matrix inequalities:
(57)
for , then the closed-loop system (50) isUUB and the control performance of (54) is guaranteedfor a prescribed .
Proof: From (56), we get
(58)
From (57), we get
(59)
From (58) and (59), we get
(60)
From the properties of in (4) and (5), the aboveinequality can imply the following inequality:
(61)
Since , we get
(62)
where .

CHEN et al.: ROBUSTNESS DESIGN OF NONLINEAR DYNAMIC SYSTEMS VIA FUZZY LINEAR CONTROL 579
Whenever , . By the argu-ment as in Theorem 1, this demonstrates that the trajectoriesof the closed-loop system (50) are UUB.
Integrating (61) from to yields
(63)
From (55), we get
(64)
This is (54) and the control performance is achievedwith a prescribed .
Corollary 2: In the case of , suppose the fuzzycontrol law (43) is employed and there exists a commonsolution such that the matrix inequalities in (57)are satisfied then the closed-loop system (50) is quadraticallystable.
Proof: The proof is trivial.From the above analysis, the most important task to deal
with the fuzzy observer-based state feedback problem is tosolve a common solution from the matrix inequalities (57).
For the convenience of design, and are chosen in thefollowing form:
(65)
where , , , and.
By substituting (65) into (57), we get
(66)
By introducing a new matrix
(67)
where and multiplying it into (66), we get
(68)
Therefore, (68) is equivalent to
(69)
With , and , the matrix inequalities(69) can be rearranged as the following form:
(70)where
The analysis above shows that when dealing with the fuzzy

580 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999
observer-based fuzzy control system, the most important taskis to solve common solutions and
from the matrix inequalities (70). Since the variablesand are cross-coupled, there are no effective
algorithms for solving this matrix inequalities as yet. However,we easily check that the matrix inequalities (70) imply
, i.e.,
(71)
for , .By the Schur complements, (71) can be transformed into the
following linear matrix inequalities (LMI’s) for a prescribed:
(72)
Note that solving and (thus ) from (72)is a standard linear matrix inequality problem (LMIP). Bysolving the LMIP in (72) and substituting , , and into(70), (70) become standard linear matrix inequalities (LMI’s).Then, solve the LMIP in (70) to obtain and (thus
).If the LMI’s in (70) and (72) have a positive-definite
solution for and , respectively, then the closed-loopsystem (50) is stable and the control performance in (54)is achieved for a prescribed.
Therefore, the optimization design for fuzzy observer-based control system of (50) is formulated as the followingconstrained optimization problem:
minimize
subject to
(70) and (72) (73)
This problem can be solved by decreasinguntiland cannot be found in (70) and (72).
The optimization design procedures of the fuzzy con-trol systems are summarized as follows.
Design Procedures:
Step 1) Select fuzzy plant rules and membership functionfor nonlinear system (1).
Step 2) Select weighting matrix , and boundingmatrices and and
.Step 3) Select the attenuation level and solve the LMIP
in (72) to obtain and (thuscan also be obtained).
Step 4) Substitute , , and into (70) and then solvethe LMIP in (70) to obtain and (thus
can also be obtained).Step 6) Decrease and repeat Steps 3–5 until and
cannot be found.
Fig. 1. Fuzzy sets ofx1.
Step 7) Check the assumptions of
and
If they are not satisfied, adjust (expand) the boundsfor all elements in , , and and thenrepeat Steps 3–6.
Step 8) Construct the fuzzy observer in (41).Step 9) Obtain fuzzy control rule in (43).
Remark 3:
1) The procedures for determining, , , , ,and are described by the following simple example.Assuming that the possible bounds for all elements in
, , and are
and
where , , andfor some , , and and
, , , .One possible description for the bounding matrices
, , and is
where , , andfor , , .
CHEN et al.: ROBUSTNESS DESIGN OF NONLINEAR DYNAMIC SYSTEMS VIA FUZZY LINEAR CONTROL 581
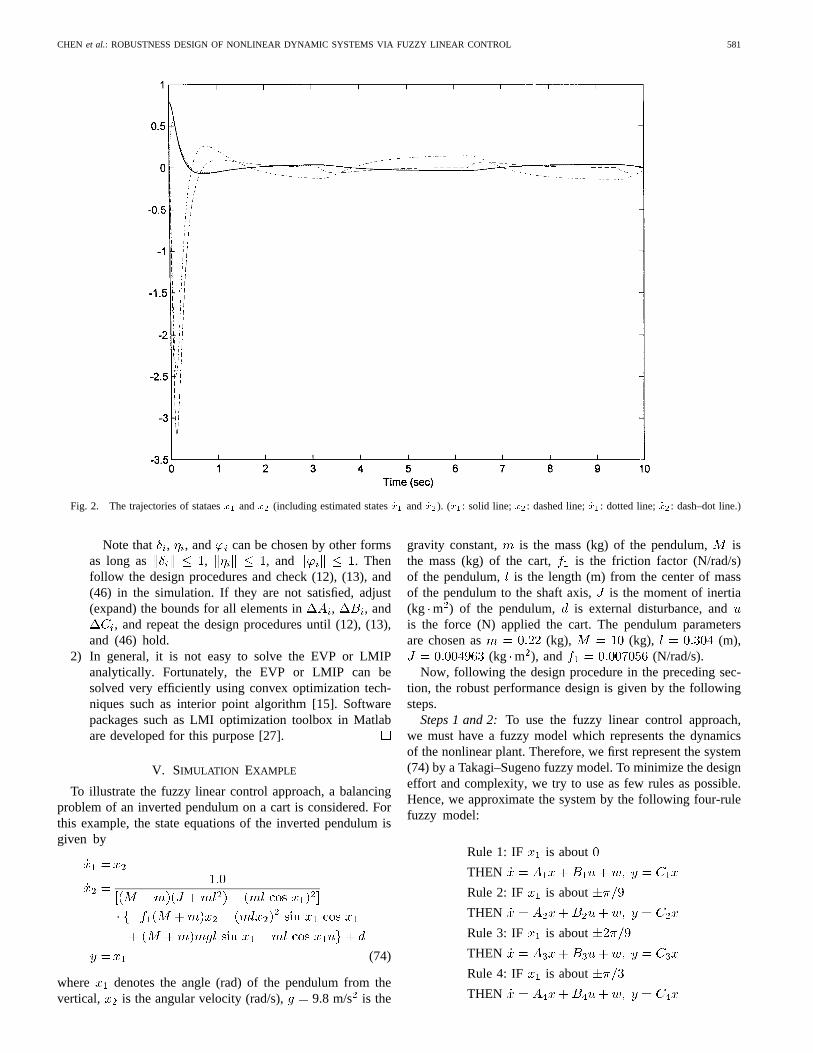
Fig. 2. The trajectories of stataesx1 andx2 (including estimated statesx1 and x2). (x1: solid line;x2: dashed line;x1: dotted line;x2: dash–dot line.)
Note that , , and can be chosen by other formsas long as , , and . Thenfollow the design procedures and check (12), (13), and(46) in the simulation. If they are not satisfied, adjust(expand) the bounds for all elements in , , and
, and repeat the design procedures until (12), (13),and (46) hold.
2) In general, it is not easy to solve the EVP or LMIPanalytically. Fortunately, the EVP or LMIP can besolved very efficiently using convex optimization tech-niques such as interior point algorithm [15]. Softwarepackages such as LMI optimization toolbox in Matlabare developed for this purpose [27].
V. SIMULATION EXAMPLE
To illustrate the fuzzy linear control approach, a balancingproblem of an inverted pendulum on a cart is considered. Forthis example, the state equations of the inverted pendulum isgiven by
(74)
where denotes the angle (rad) of the pendulum from thevertical, is the angular velocity (rad/s), 9.8 m/s is the
gravity constant, is the mass (kg) of the pendulum, isthe mass (kg) of the cart, is the friction factor (N/rad/s)of the pendulum, is the length (m) from the center of massof the pendulum to the shaft axis, is the moment of inertia(kg m ) of the pendulum, is external disturbance, andis the force (N) applied the cart. The pendulum parametersare chosen as (kg), (kg), (m),
(kg m ), and (N/rad/s).Now, following the design procedure in the preceding sec-
tion, the robust performance design is given by the followingsteps.
Steps 1 and 2:To use the fuzzy linear control approach,we must have a fuzzy model which represents the dynamicsof the nonlinear plant. Therefore, we first represent the system(74) by a Takagi–Sugeno fuzzy model. To minimize the designeffort and complexity, we try to use as few rules as possible.Hence, we approximate the system by the following four-rulefuzzy model:
Rule 1: IF is about
THEN
Rule 2: IF is about
THEN
Rule 3: IF is about
THEN
Rule 4: IF is about
THEN
582 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999
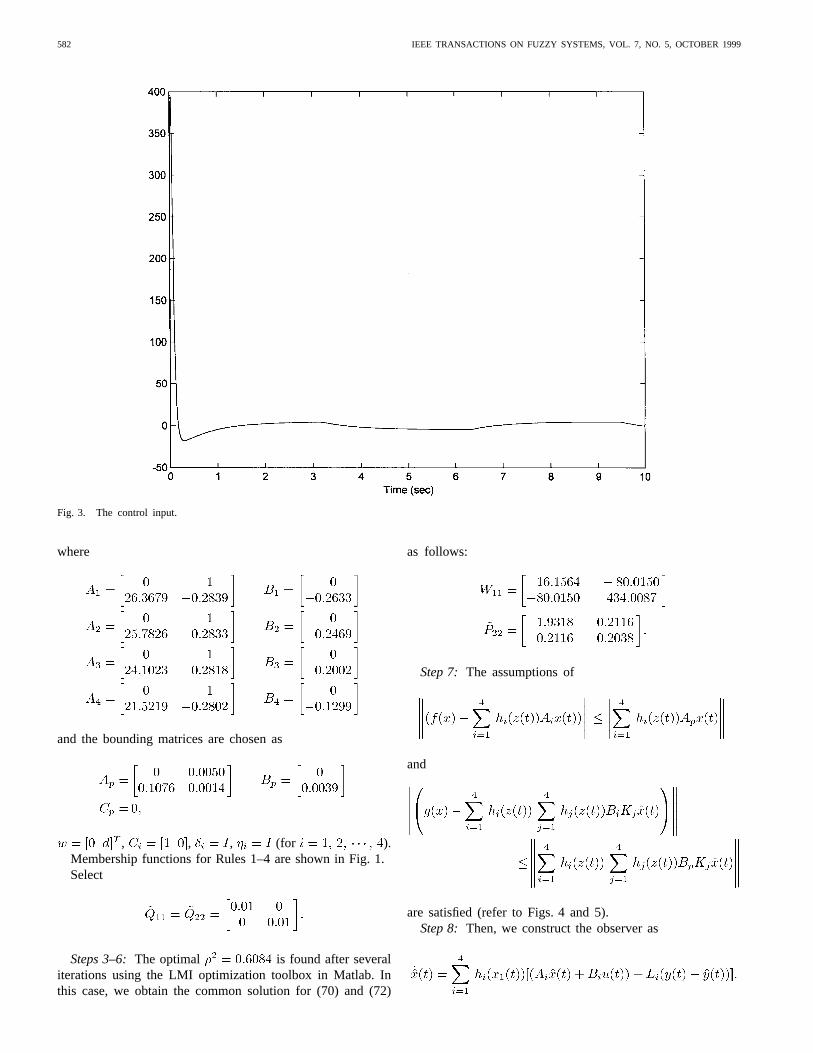
Fig. 3. The control input.
where
and the bounding matrices are chosen as
, , , (for ).Membership functions for Rules 1–4 are shown in Fig. 1.Select
Steps 3–6:The optimal is found after severaliterations using the LMI optimization toolbox in Matlab. Inthis case, we obtain the common solution for (70) and (72)
as follows:
Step 7: The assumptions of
and
are satisfied (refer to Figs. 4 and 5).Step 8: Then, we construct the observer as

CHEN et al.: ROBUSTNESS DESIGN OF NONLINEAR DYNAMIC SYSTEMS VIA FUZZY LINEAR CONTROL 583
Fig. 4. The plots of f(x(t))� 4
i=1hi(x1(t))Aix(t) (dashed line) and 4
i=1hi(x1(t))�Aix(t) (solid line)
Fig. 5. The plots of 4
i=1hi(x1(t))
4
j=1 hj(x1(t))(g(x(t))�Bi)Kj x(t) (dashed line) and 4
i=1 hi(x1(t))4
j=1 hj(x1(t))�BiKj x(t)
(solid line).

584 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 7, NO. 5, OCTOBER 1999
Step 9: Therefore, we obtain the control law
Figs. 2–5 present the simulation results. Initial condi-tion is assumed to be , , ,
, and the external disturbance is assumedto be periodically square wave with amplitude in thesimulations. Fig. 2 shows the trajectories of the statesand
(including estimated states and ). The control input ispresented in Fig. 3. The simulation results show that the fuzzyobserver-based controller can balance the inverted pendulumwith large external disturbance and the performance canbe achieved. Due to persistent periodical external disturbance,state variables and still have small vibration aroundzero at steady state.
VI. CONCLUSION
In this paper a fuzzy linear control technique and anattenuation technique have provided a rough tuning and aprecise tuning, respectively, and are combined to achieverobust performance for nonlinear dynamic systems. If thestate variables are unavailable, a fuzzy observer-based controlscheme has been also proposed to achieve performance.Furthermore, the stability of the fuzzy control systems is alsoguaranteed in this work.
Actually, the proposed fuzzy linear control can be ap-plied to any robust control design of nonlinear systems.With the aid of linear fuzzy approximation algorithm andLMI technique, the robust control design can be ex-tended from linear systems toward nonlinear systems. Arobust optimization technique is also developed. By em-ploying the attenuation technique, the performance oflinear fuzzy control design for nonlinear systems can besignificantly improved. Furthermore, the robust fuzzy controlscheme is also developed to eliminate as much as possiblethe effect of the external disturbance. Therefore, the proposeddesign algorithm is appropriate for practical control designof mechanical systems with bounded external disturbances.The proposed design method is simple and the number ofmembership functions for the proposed control law can beextremely small. However, because of the use of fuzzy ap-proximation technique and control scheme, the resultsare less conservative than the other robust control methods.Based on the interior point optimization technique, a designprocedure is proposed for the fuzzy observer-based controlto achieve the robust optimization design of the nonlinearsystems. Simulation results indicate that the desired robustperformance for nonlinear systems can be achieved via theproposed method.
REFERENCES
[1] T. Takagi and M. Sugeno, “Fuzzy identification of systems and itsapplications to modeling and control,”IEEE Trans. Syst., Man, Cybern.,vol. 15, pp. 116–132, Jan./Feb. 1985.
[2] G. C. Hwang and S. C. Lin, “A stability approach to fuzzy controldesign for nonlinear systems,”Fuzzy Sets Syst., vol. 48, pp. 279–287,1992.
[3] J. J. Buckley, “Theory of fuzzy controller: An introduction,”Fuzzy SetsSyst., vol. 51, pp. 249–258, 1992.
[4] C. C. Lee, “Fuzzy logic in control systems: Fuzzy logic controller—PartI and Part II,” IEEE Trans. Syst., Man, Cybern., vol. 20, pp. 404–435,Mar./Apr. 1990.
[5] H. Ying, W. Silver, and J. J. Buckley, “Fuzzy control theory: A nonlinearcase,”Automatica, vol. 26, pp. 513–520, 1990.
[6] H. O. Wang, K. Tanaka, and M. F. Griffin, “An approach to fuzzy controlof nonlinear systems: Stability and design issues,”IEEE Trans. FuzzySyst., vol. 4, pp. 14–23, Feb. 1996.
[7] B. S. Chen, C. H. Lee, and Y. C. Chang, “H1 tracking design of linearsystems: Adaptive fuzzy approach,”IEEE Trans. Fuzzy Syst., vol. 4, pp.32–43, Nov. 1996.
[8] B. R. Barmish, “Necessary and sufficient conditions for quadraticstability of an linear systems,”J. Optim. Theory Appl., vol. 46, no. 4,pp. 399–408, 1985.
[9] P. P. Khargonekar, I. R. Petersen, and K. Zhou, “Robust stabilizationof linear systems: Quadratic stability andH1 control theory,” IEEETrans. Automat. Contr., vol. 35, no. 3, pp. 356–361, Mar. 1990.
[10] B. A. Francis, A Course inH1 Control Theory, Lecture Notes inControl Information Science. Berlin, Germany: Springer-Verlag, 1987,vol. 8.
[11] A. Stoorvogel,The H1 Control Problem: A State Space Approach.Englewood Cliffs, NJ: Prentice-Hall, 1992.
[12] J. Doyle, K. Glover, P. P. Khargonekar, and B. A. Francis, “Statespace solution to standardH1 control problems,”IEEE Trans. Automat.Contr., vol. 34, no. 8, pp. 831–847, Aug. 1989.
[13] B. S. Chen, T. S. Lee, and J. H. Feng, “A nonlinearH1 controldesign in robotic systems under parameter perturbation and externaldisturbance,”Int. J. Contr., vol. 59, pp. 439–461, 1994.
[14] B. D. O. Anderson and J. B. Moore,Optimal Control: Linear QuadraticMethods. Englewood Cliffs, NJ: Prentice-Hall, 1990.
[15] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan,Linear MatrixInequalities in System and Control Theory.Philadelphia, PA: SIAM,1994.
[16] G. Feng, S. G. Cao, N. W. Rees, and C. K. Chak, “Design of fuzzycontrol systems with guaranteed stability,”Fuzzy Sets Syst., vol. 85, pp.1–10, 1997.
[17] H. K. Khalil, Nonlinear Systems.London, U.K.: Macmillan, 1992.[18] Y. M. Cho and R. Rajamani, “A systematic approach to adaptive
observer synthesis for nonlinear systems,”IEEE Trans. Automat. Contr.,vol. 42, pp. 534–537, Apr. 1997.
[19] A. Isidori and A. Asolfi, “Disturbance attenuation andH1 controlvia measurement feedback in nonlinear systems,”IEEE Trans. Automat.Contr., vol. 37, pp. 1283–1293, Sept. 1992.
[20] A. Isidori, “ H1 control via measurement feedback for affine nonlinearsystems,”Int. J. Robust Nonlinear Contr., 1994.
[21] J. P. LaSalle, “Some extensions of Lyapunov’s second method,”IRETrans. Circuit Theory, pp. 520–527, Dec. 1960.
[22] J. T. Spooner and K. M. Passino, “Stable adaptive control using fuzzysystems and neural networks,”IEEE Trans. Fuzzy Syst., vol. 4, pp.339–359, Aug. 1996.
[23] X. Ma, Z. Sun, and Y. He, “Analysis and design of fuzzy controllerand fuzzy observer,”IEEE Trans. Fuzzy Syst., vol. 6, pp. 41–51, Feb.1998.
[24] C. M. Cheng and N. W. Rees, “Stability analysis of fuzzy multivari-able systems: Vector Lyapunov function approach,”Proc. Inst. Elect.Eng.—Contr. Theory Appl., vol. 144, no. 5, Sept. 1997.
[25] K. Narendra and A. M. Annaswamy, “A new adaptation law for robustadaptation without persistent excitation,”IEEE Trans. Automat. Contr.,vol. AC-32, pp. 134–145, Feb. 1987.
[26] C. S. Tseng, B. S. Chen, and H. J. Uang, “A robustness design ofuncertain nonlinear dynamic systems via fuzzy linear control,” inIEEEWorld Congress Computat. Intell., Anchorage, AK, May 1998, pp.428–433.
[27] P. Gahinet, A. Nemirovski, A. J. Laub, and M. Chilali,LMI ControlToolbox. Natick, MA: MathWorks, 1995.
[28] B. S. Chen, H. J. Uang, and C. S. Tseng, “Robust tracking enhancementof robot systems including motor dynamics: A fuzzy-based dynamicgame approach,”IEEE Trans. Fuzzy Syst., vol. 6, pp. 538–552, Nov.1998.

CHEN et al.: ROBUSTNESS DESIGN OF NONLINEAR DYNAMIC SYSTEMS VIA FUZZY LINEAR CONTROL 585
Bor-Sen Chen (M’82–SM’89) received the B.S.degree from Tatung Institute of Technology in 1970,the M.S. degree from National Central University,Taiwan, R.O.C., in 1973, and the Ph.D degree fromthe University of Southern California, Los Angeles,in 1982.
He was a Lecturer, Associate Professor, and Pro-fessor at Tatung Institute of Technology from 1973to 1987. He is now a Professor at National TsingHua University, Hsin-Chu, Taiwan, R.O.C. His cur-rent research interests include control and signal
processing.Dr. Chen has received the Distinguished Research Award from National
Science Council of Taiwan four times. He is a Research Fellow of the NationalScience Council and the Chair of the Outstanding Scholarship Foundation.
Chung-Shi Tseng received the B.S. degree fromthe Department of Electrical Engineering, NationalCheng Kung University, Tainan, Taiwan, R.O.C., in1984, and the M.S. degree from the Department ofElectrical Engineering and Computer Engineering,University of New Mexico, Albuquerque, in 1987.He is currently working toward the Ph.D. degree inthe Department of Electrical Engineering, NationalTsing Hua University, Hsin Chu, Taiwan, R.O.C.
His current research interests include robotics,robust control, and fuzzy systems.
Huey-Jian Uang received the B.S. degree from theDepartment of Electrical Engineering, Feng-ChiaUniversity, Taichung, Taiwan, R.O.C., and the M.S.degree from National Tsing-Hua University, Hsin-Chu, Taiwan, R.O.C., in electrical engineering. He iscurrently working toward the Ph.D. degree in elec-trical engineering, National Tsing Hua University.
His current research interests include robotics,robust control, and fuzzy systems.
![[168]a Methodology to Design Stable Nonlinear Fuzzy Control Systems](https://static.fdocuments.net/doc/165x107/55cf854a550346484b8c62c2/168a-methodology-to-design-stable-nonlinear-fuzzy-control-systems.jpg)






![Adaptive fuzzy controller for multivariable nonlinear state …...A fuzzy adaptive controller, inspired from [10, 1 1], has been recently proposed in [32] for nonlinear time-delay](https://static.fdocuments.net/doc/165x107/607039471e6d5c1cc34c0c6d/adaptive-fuzzy-controller-for-multivariable-nonlinear-state-a-fuzzy-adaptive.jpg)




![APPLICATION OF SELF-TUNING FUZZY PID CONTROLLER ON ......Fuzzy logic is used to tune each ... control to improve the robustness and hybrid control of fuzzy and PID [18], Fuzzy-PD control](https://static.fdocuments.net/doc/165x107/5e7dc446b11a672afd324349/application-of-self-tuning-fuzzy-pid-controller-on-fuzzy-logic-is-used-to.jpg)





