
Robust Control 8 - Information Technologyhgk22/courses/MEM633_635/Robust Contro… · 5/13/2003...
46
5/13/2003 Robust Control 8 Robust Stability Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University
Transcript of Robust Control 8 - Information Technologyhgk22/courses/MEM633_635/Robust Contro… · 5/13/2003...

5/13/2003
Robust Control 8 Robust Stability
Harry G. KwatnyDepartment of Mechanical Engineering & MechanicsDrexel University

Outline• Modeling Uncertainty• Robust Stability/Robust Performance• Robust Stability of the M-∆ Structure• Uncertainty using Coprime Factors• The Structured Singular Value

Modeling Uncertainty( )Let be a stable transfer matrix with
may be , i.e., full may be , e.g., block diagonal or some elements
unstructuredstructured
Additive uncertainty
may be real.
:
Multiplicative uncertain
p
s
G G
γ∞
∆ ∆ ≤
∆∆
= + ∆
( )( )
: inpu
tyt
outputp
p
G G I
G I G
= + ∆
= + ∆
Actual plant
Nominal plant
Uncertainty

Example
( ) ( )2
2 2
A spacecraft attitude control model that includes the rigid body dynamics plus one flexible mode is given by the transfer function
2 21
A nominal model that includes only the rigid body d
ps sG s
s s s+ +=
+ +
( )
( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
2 22 2
2
2
ynamics is2
Additive uncertainty: 2 2 2 1
11
Multiplicative uncertainty:
12 1
p
pp
G ss
s sG s G ss s ss s s
G G sG s G sG s s
=
+ + −= + ∆ ⇒ ∆ = − =+ ++ +
− −= + ∆ ⇒ ∆ = =+ +

M-∆ Structurey∆u∆
y∆u∆
( ) 111 12 22 21N F P P I P K P−= + −
y∆u∆
11M N=

Obtaining P, N, M
K
G W
κ∆
z
y−u
y∆ u∆
w
( ) ( )( ) ( )
11
1 1
To generate , noteinputs: , ,outputs: , ,
0 0
Pu w u
y z y
IK I GK
P WG WKG I K
WG NWG I KG W I GKG I G
G −
∆
∆
−
− −
− + = ⇒ = + + −
− +
− −

Singular ValuesRecall a singular value and the corrsponding singular vectorsof a rectangular matrix are, respectively, the scalar andthe two vectors , that satisfy
The singular value decomposition of
T
Au v
Av uA u v
σ
σσ
==
isT
AA U V= Σ
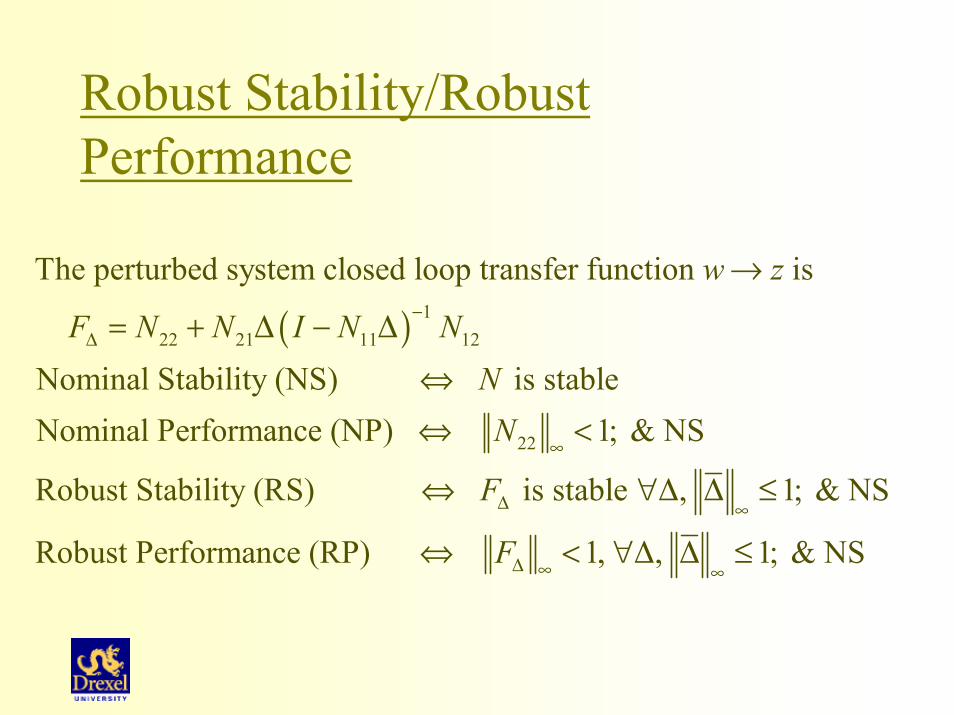
Robust Stability/Robust Performance
( ) 122 21 11 12
22
The perturbed system closed loop transfer function is
Nominal Stability (NS) is stableNominal Performance (NP) 1; & NS
Robust Stability (RS)
w z
F N N I N NNN
−∆
∞
→
= + ∆ − ∆⇔⇔ <
⇔ is stable , 1; & NS
Robust Performance (RP) 1, , 1; & NS
F
F
∆ ∞
∆ ∞ ∞
∀∆ ∆ ≤
⇔ < ∀∆ ∆ ≤

Small Gain Theorem( ) ( )
( )( )
Recall spectral radius: ( ) max ( )
Consider a systemwith stable open loop transfer function Theorem (Spectral radius stability theore
. Then the closed loop
is
m).
stTheo
able if ( ) 1e
, .r
iiL j L j
L s
L j
ρ ω λ ω
ρ ω ω
=
< ∀
( ) Consider a system
with stable open loop transfer function . Then the closed loop
is stable if ( ) 1, , where deno
m (Small Gain T
tes any norm sa
heo
tis
rem)
fying
.
.L s
L j L
AB A B
ω ω< ∀
≤ ⋅

Determinant Stability Condition ( ) ( ) Assume , are stable and belongs to
a convex set of perturbations, such that if ' is a memberthen so is ' for any real scalar with 1. Then the
system is stable for all admissib
Theorem: M s s
c c cM
∆ ∆∆
∆ ≤− ∆
( )
( )( )( )( ) ( )
le perturbations if and only if
The Nyquist plot of det does not encirclethe origin for all
det 0, ,
1, , , 1, ,dimi
I M
I M j
M j i M
ω ω
λ ω ω
− ∆∆
⇔ − ∆ ≠ ∀ ∀∆
⇔ ∆ ≠ ∀ ∀∆ = ∆…

Spectral Radius Stability Condition( ) ( ) Assume , are stable and belongs to
a set of perturbations, such that if ' is a member then so is ' for any complex scalar with 1. Then the
system is stabl
The
e for all admissibl
ore
e
m: M s s
c c c M
∆ ∆∆
∆ ≤ − ∆
( )( )
( )( )
perturbations if and only if
1, ,
max 1,
M j
M j
ρ ω ω
ρ ω ω∆
∆ < ∀ ∀∆
∆ < ∀

Robust Stability of M-∆ Structure
( )( )
. Assume that the nominal system is stable and that the
perturbations ar
Theorem (Robust stability
e stable. Then the system is
stable for all perturbations
for unstructured perturbations
sa
)
M s
s M∆ − ∆
( )( )
( ) ( ) ( ) ( ) ( )Remarks on Proof: If satisfies 1, then
max max max .
This gives necessity. The small gain theorem with gives
sufficiency.
tisfying 1 if and only if
( ) 1, 1
M M M M
L M
M j M
σ
ρ σ σ σ σ
σ ω ω
∆ ∆ ∆
∞
∞
∆ ∆ ≤
∆ = ∆ = ∆ =
= ∆
∆ ≤
< ∀ ⇔ <

Coprime Factorization
1 1
A transfer matrix can be written in (left or right) coprime factored form
where , are stable, i.e., contains all of the RHP-zeros of and
contains all of the RHP-poles of
r rG D N N D
N D N G D
− −= =
• as RHP-zeros.
, are coprime, i.e., they have no common RHP-zeros which result in cancelation. Formally, they satisfy the Bezout identity: there exist stable , that satisfy
orl l
GN D
U VN U DV I
•
+ =
* * * *
a coprime factorization is called normalized if
or
r r
l l l l r r r r
UN VD I
N N D D I N N D D I
+ =•
+ = + =

Example
( ) ( )( )( )( )
( ) ( )
( ) ( )( ) ( ) ( )( )1 02 2
1 0 1 0
1 23 4
An obvious factorization is1 3,4 2
Another one is1 2 3 4
, , , 0
s sG s
s s
s sN s D ss s
s s s sN s D s a a
s a s a s a s a
− +=
− +
− −= =+ +
− + − += = >
+ + + +
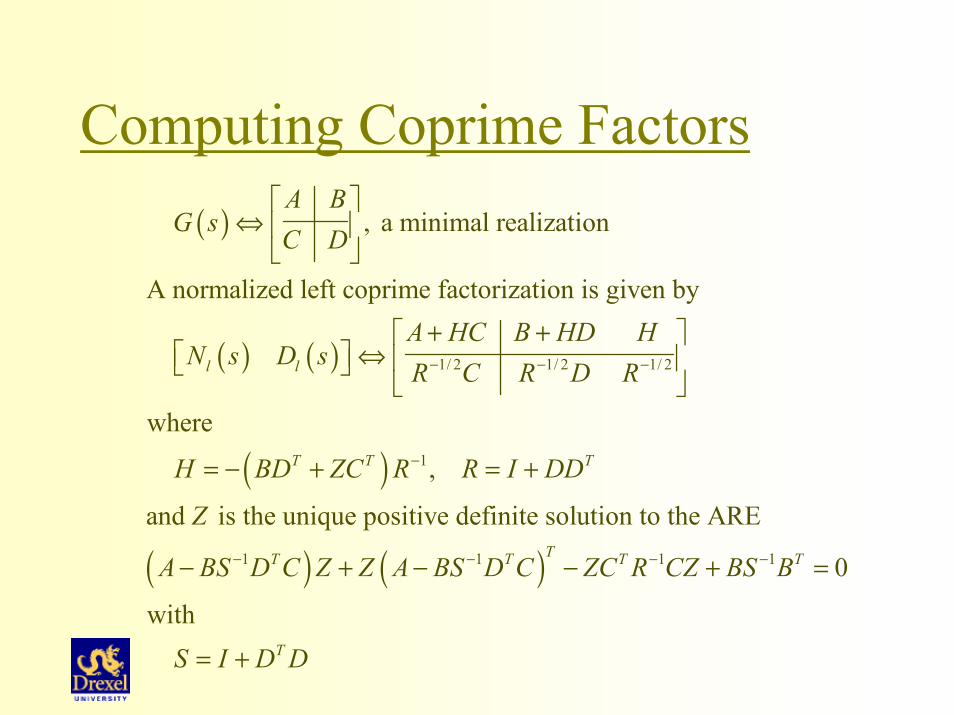
Computing Coprime Factors( )
( ) ( )
( )
1/ 2 1/ 2 1/ 2
1
, a minimal realization
A normalized left coprime factorization is given by
where
,
and is the unique positive definite soluti
l l
T T T
A BG s C D
A HC B HD HN s D s R C R D R
H BD ZC R R I DD
Z
− − −
−
⇔
+ + ⇔
= − + = +
( ) ( )1 1 1 1
on to the ARE
0
with
TT T T T
T
A BS D C Z Z A BS D C ZC R CZ BS B
S I D D
− − − −− + − − + =
= +

Uncertainty Using Coprime Factors
( ) ( )
1 1
1
Recall that a transfer matrix can be written in coprime factored form
Suppose we allow separate perturbations in the numeratorand denominator so that the actual plant is
,
r r
p D N
G D N N D
G D N
− −
−
= =
= + ∆ + ∆ ∆[ ]
[ ] ( )
[ ]
1 1
This is equivalent to a system in structure with
= ,
RS 1/
N D
N D
N D
MK
M I GK DI
M
ε
ε ε
∞
− −
∞∞
∆ ≤
− ∆
∆ ∆ ∆ = − +
⇒ ∀ ∆ ∆ ≤ ⇔ <

Uncertainty Using Coprime Factors, Contunued
y∆u∆
( ) 1 1KI GK D
I− −
− +
[ ]N D∆ ∆D∆N∆
lN 1lD−
K−

M-∆ Structure for CoprimeUncertainty
[ ] ( )
( ) [ ]
( ) [ ]
1 1 1 1
1 1
1 1
1 1
,
, ,
This is equivalent to a system in structure with
= ,
D N D N
N D
N D
N D
y Gu D y D u u Ky y GKy D y D Ky
Ky I GK D y
I
Ky I GK D u u y y y
I
MK
M I GK DI
− − − −
− −
− −
∆ ∆ ∆ ∆
− −
= − ∆ + ∆ = − ⇒ = − − ∆ − ∆
= − + ∆ ∆
= − + = ∆ ∆ =
− ∆
∆ ∆ ∆ = − +

Controller Design with CoprimeUncertainty
( ) ( ) [ ]{ }
( )
1
1 1
Consider the family of perturbed plants
with some stability margin 0.The system is robustly stabilized by the controller ifand only if
1
Robust Stabili
p D N N DG D N
u Ky
KI GK D
I
ε
ε
γε
−
∞
− −
∞
= + ∆ + ∆ ∆ ∆ <
>=
− ≤
Find the lowest achievable
and the corresponding maximum stability margin and thecorresp
zer Design
onding cont
Problem:
roller .Kγ ε

Solution to RSDP( )( )
( ) ( )( ) ( )
( ) ( )
1/ 21min max
1 1 1 1
1 1 1 1
1
where , are the unique positive definite sol'ns of the ARE's
0
0
and minimal realization , , ,
TT T T T
TT T T T
XZ
X Z
A BS D C Z Z A BS D C ZC R CZ BS B
A BS D C X X A BS D C XBS B X C R C
G s A B C D
R I
γ ε ρ−
− − − −
− − − −
= = +
− + − − + =
− + − − + =
⇔
= + ,T TDD S I D D= +

Solution to RSDP, Cont’d
( )
( ) ( ) ( )
( )( )
1 1min
1 12 2
1
2
a solution that guarantees
for some
is given by
1
T T T T
T T
T T
KI GK D
I
A BF L ZC C DF L ZCK
B X D
F S D C B X
L I XZ
γ γ γ
γ γ
γ
− −
∞
− −
−
− ≤ >
+ + + = −
= − +
= − +

Example: Combustion Stabilizationmicrophone
speaker
controller
fuel
air
air
( ) ( )( )( )
2 2
2 2 2 21 1 1 2 2 2
flame acoustics
1 1 2 2
2
2 2
1500, 1000, 0.045, 4500
0.5, 1000, 0.3, 3500
z z zf
f
f f z z
s ss zG s K
s p s s s s
z p
ρ ω ωρ ω ω ρ ω ω
ρ ωρ ω ρ ω
+ + += + − + + +
= = = − =
= = = = Poles & zeros in RHP
A. M. Annaswamy and A. F. Ghonien, "Active Control in Combustion Systems," IEEE Control Systems, vol. December, pp. 49-63, 1995

Control Design• We will consider 3 designs
Classical approach – lead plus notchRobust stabilizationRobust performance (loop shaped stabilization)
• In each case look atRoot locusSensitivity functionError response to command stepGain and phase margins

Classical Lead + Notch( ) ( )
( )( )( )
2
2
0.70.0525
5 36c
s ssG s
s s s
+ ++=
+ + +

Classical Sensitivity Function

Classical Error Response to Step

Classical MarginsGMFrequency: [0.9109 4.0482 Inf]GainMargin: [0.7418 1.7252 Inf]PMFrequency: [0.6182 3.6938 5.2243 7.3372]PhaseMargin: [-55.1366 25.4364 179.2394 31.6964]

Classical Nyquist

Robust Stabilization (CoprimeUncertainty)
>> cd C:\Projects\Examples>> combustiongammin =
5.1270>> zpk(K)Zero/pole/gain:-32.5492 (s+0.9894) (s-0.3953) (s^2 + 2.101s + 12.25)---------------------------------------------------------(s+1.511) (s^2 + 9.959s + 32.55) (s^2 + 1.209s + 14.59)

Robust Stabilization Root Locus

Robust Stabilization Sensitivity

Robust Stabilization MarginsGMFrequency: [0 1.0251 2.6936 7.0934]GainMargin: [1.8545 0.6793 1.7478 19.1030]PMFrequency: [0.5216 1.6291]PhaseMargin: [-29.1102 19.5459]

Robust Stabilization Nyquist

Robust Stabilization Error Response to Step
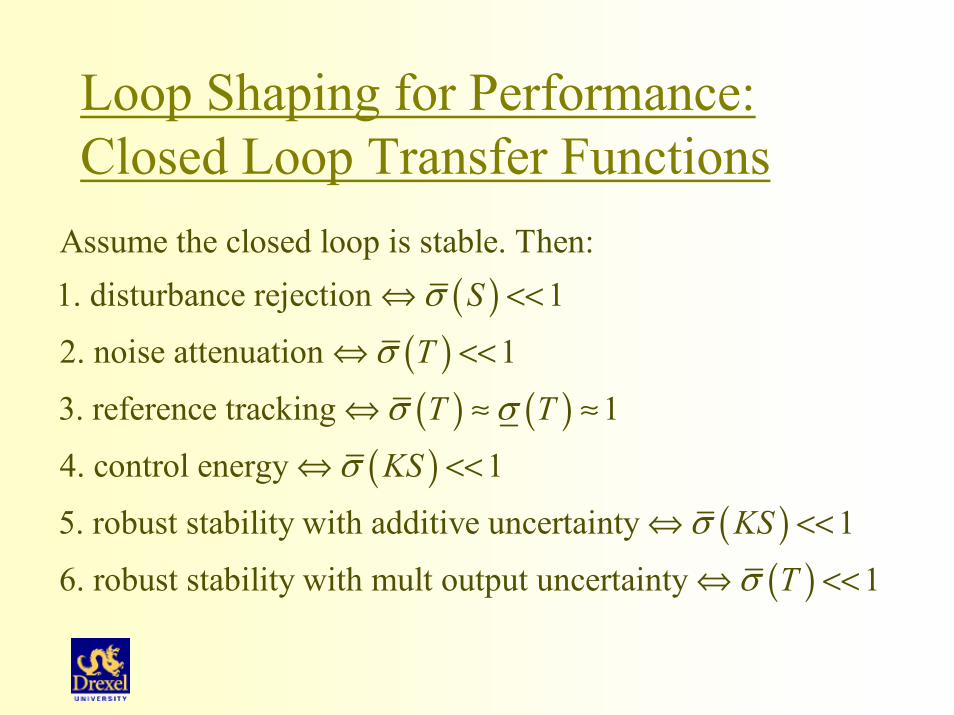
Loop Shaping for Performance: Closed Loop Transfer Functions
( )( )( ) ( )
( )( )
Assume the closed loop is stable. Then:1. disturbance rejection 1
2. noise attenuation 1
3. reference tracking 1
4. control energy 1
5. robust stability with additive uncertainty 1
S
T
T T
KS
KS
σσσ σ
σσ
⇔ <<
⇔ <<
⇔ ≈ ≈
⇔ <<
⇔ <<
( )6. robust stability with mult output uncertainty 1Tσ⇔ <<

Loop Shaping for Performance: Open Loop Transfer Function
( )( )( )
( )( )
Assume the closed loop is stable. Then:1. disturbance rejection 1
2. noise attenuation 1
3. reference tracking 1
4. control energy 1
5. robust stability with additive uncertainty 1,
if
L
L
L
K
K
σσσ
σσ
⇔ >>
⇔ <<
⇔ >>
⇔ <<
⇔ <<
( )( )
1
6. robust stability with mult output uncertainty 1
L
L
σσ
<<
⇔ <<

Effect of Weighting Function( )1
1sW ss+= Shaped plant
Original plant

Robust Performance (Shaped Coprime Uncertainty)
>> combustion2gammin =
6.7266>> zpk(K)Zero/pole/gain:-54.29 (s^2 - 0.102s + 0.1931) (s^2 + 2.101s + 12.25)---------------------------------------------------------(s+1.517) (s^2 + 11.74s + 42.92) (s^2 + 1.122s + 15.35)

Robust Stabilization Root Locus

Robust Stabilization Sensitivity

Robust Stabilization MarginsGMFrequency: [0.4591 1.1951 2.7718 7.5896]GainMargin: [5.0727 0.7377 1.5541 14.4468]PMFrequency: [0.2363 0.7681 1.7705]PhaseMargin: [89.2292 -32.9393 14.9418]

Robust Stabilization Step Response

Robust Stabilization Nyquist
Combustion Example Summary• Classical design does stabilize, but margins and
performance are poor.• Robust stabilization dramatically improves
margins, but performance is still poor.• Robust performance dramatically improves
performance, but margins are reduced.• Can additional loop shaping improve margins?• Can γ-iteration improve design?

Structured Singular Value (µ)The goal is to find a generalization of , that allows generalizationof the above results to structured . Here is one approach.Find the smallest (infinity-norm) in a structured class that makes
d
σ ρ∆
∆ D
( ) ( ) ( )
( ) ( ) ( ){ }
( ) ( ) ( ) ( ) ( )
1
et 0; then : 1That is
Notice that for an unstructured class, the smallest
min d
withdet 0 has 1/
et 0M
I M
M
I
I
M
M
M M M
µ
µ σ
σ
σ σ µ σ
−
∆∈
− ∆ = = ∆
∆
∆ − ∆ =
− ∆ = ∆ = ⇒ =
D

Robust Stability: Structured Uncertainty
( ) ( )
( )Recall
. Assume that , are stable. Then the system
is stable for all admissible per
Theorem (Robust stabi
turbations satisfying
lity for structured perturbat
1 if
and only if ( ) 1, .
ions)M s s M
M jµ ω ω∞
∆ − ∆
∆ ≤
< ∀( )( )
( ) ( )
( )
: RS det 0, , , 1
If 1 at all frequencies, the required perturbation to make det 0
is larger than 1, so the system is stable.
If 1 at some frequency, there exists a perturbation wi
I M j
M I M
M
ω ω
µ
µ
∞⇔ − ∆ ≠ ∀ ∀∆ ∆ ≤
< ∆ − ∆ =
= ( )( )
th 1 such that
det 0 at this frequency and the system is unstable.I M
σ ∆ =
− ∆ =






![Robust Model Predictive Control - Carnegie Mellon …cepac.cheme.cmu.edu/.../Ronust_Control_Classnotes.pdf1 Robust Model Predictive Control Formulations of robust control [1] The robust](https://static.fdocuments.net/doc/165x107/5aab45707f8b9a2b4c8bd345/robust-model-predictive-control-carnegie-mellon-cepacchemecmueduronustcontrol.jpg)











