PiksiMulti - Robots éducatifs, robots de service, robots ...
description

Robots of IE CIM LAB
IE 447 - CIM Lecture Notes - Chapter 9 MHS 1
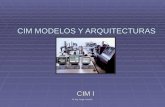
SCORBOT ER9
The SCORBOT-ER 9 is a five-axis vertically articulated robot designed for work inindustrial training facilities.With a multi-tasking controller that provides real-time control and synchronization of up to 12 axes, 16 inputs and 16 outputs, the SCORBOT-ER 9 supports both stand-alone applications as well as sophisticated automated work cells.

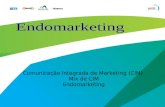
Steps in Robot ProgrammingProgramming of an Industrial Task
1. Teach Pendant Operation• move the robot arm in
– Joints– Cartesian– Tool coordinates
• Control robot grippers and the speed of motion
• Record positions to the robot controller’s memory
• Move robot arm to recorded positions
1AXIS 1 X
2AXIS 2 Y
3AXIS 3 Z
4AX IS 4
5AXIS 5
6AX IS 6
7AX IS 7
8AXIS 8
9AXIS 9
0SELE C T
AXIS
SIN G LE STE P
SPLIN E
M O VE C
IN SERT
DELETE
R EC ORDP O SITION
AB ORTSPE ED (% )
SP EE D L(% )
M O VE
M O VE L
EN TE R
EX EC U TE
O PEN
CLO SE
CO N TRO LO N/O FF
RU N
C LR
G R O U PSELEC T
AU TO M ODE
2IE 447 - CIM Lecture Notes - Chapter 9 MHS