Robot Swarms, Lego Bricks, Ant Farms, and Star Wars: How ... Conferencia-Magistral... · Decision...
50
Swarm Logistics Why a Thousand Robots are Better Than One James McLurkin
Transcript of Robot Swarms, Lego Bricks, Ant Farms, and Star Wars: How ... Conferencia-Magistral... · Decision...

Swarm Logistics
Why a Thousand Robots are Better Than One
James McLurkin

Part I: The Robot Revolution has Already Begun (And it is being televised)

iRobot Roomba
picture courtesy iRobot

Honda ASIMO
picture courtesy Honda

The iRobot Packbot
pictures courtesy iRobot

The “Three D’s” of Robotics:
Dangerous
Dirty
Dull
Distributed

Amazon.com: Warehouse Distribution
Large populations of robots can fundamentally transform the problem

Why Robots?
The reasons to use robots are well known:
•Cost Savings
•Precision
•Efficiency
Multi-Robot systems provide even more advantages
•Parallel Operations
•Geographic Distribution
•Redundant, Fault-Tolerant operation
Multi-Robot Systems can Transform Logistics Problems
(What does that mean, anyway?)

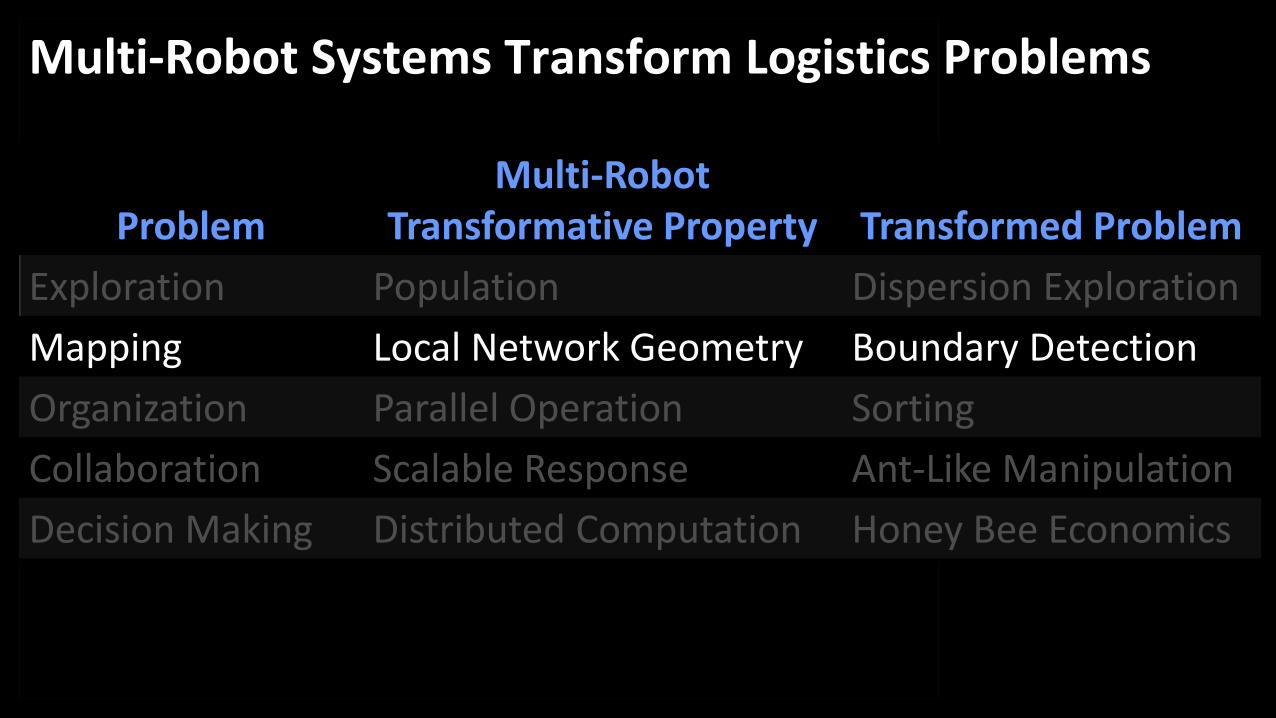
Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics

Logistics in Challenging Environments

What if we sent
20 robots to look for hot spots in forest fires?

What if we sent
200 robots to look for survivors after an
earthquake?

What if we sent
2,000 robots to Explore Mars?
Part II: Distributed Algorithms 101
But use a Distributed Algorithm!
Algorithm: n: a procedure for solving a mathematical problem.
Distributed: adj. to divide among several or many.
Distributed Algorithm: n. A program that runs on multiple computers that interact to form a group result

Computation Model

Computation Model

Local Communications
Each robot can communicate with robots within range
r=

Global Network
r=
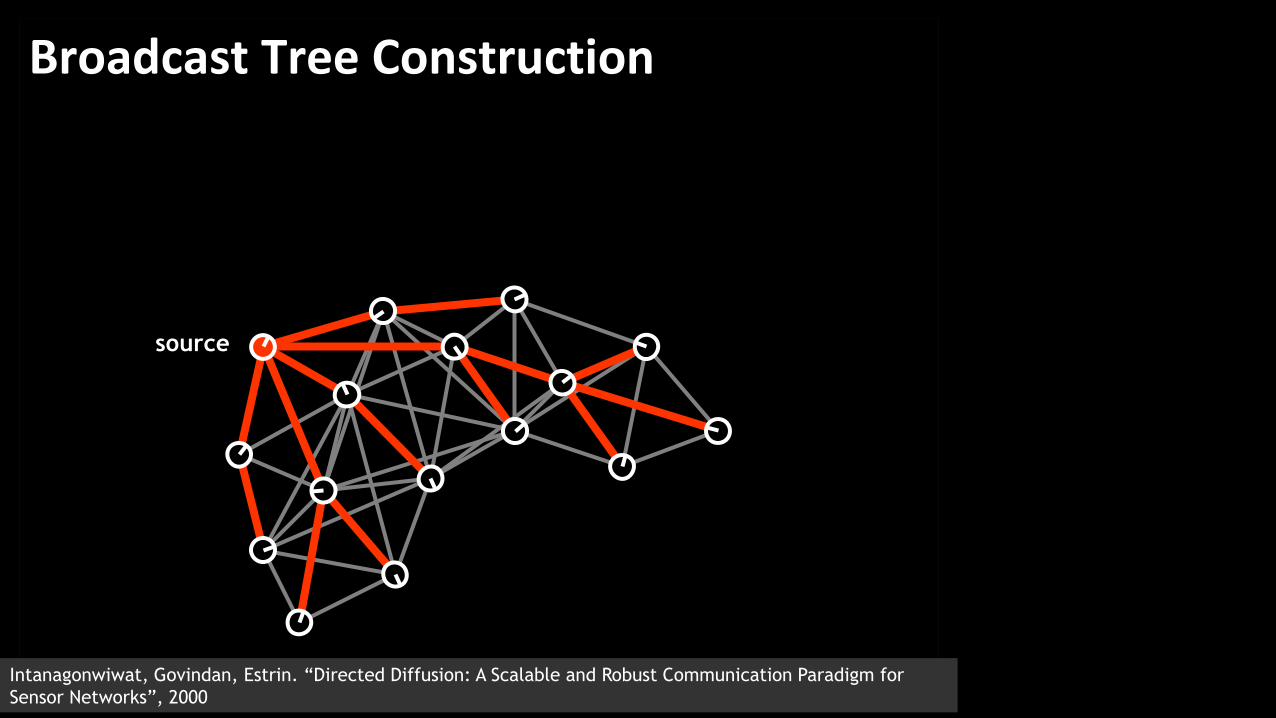
Broadcast Tree Construction
source
Intanagonwiwat, Govindan, Estrin. “Directed Diffusion: A Scalable and Robust Communication Paradigm for
Sensor Networks”, 2000

Part III: Multi-Robot Systems and Logistics Problems


Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics

Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics

Building Search
GuideBot
ChargingBot
InteriorBot
BoundaryBot
1. Disperse throughout a building
2. Find an item of interest
3. Lead the user to the item


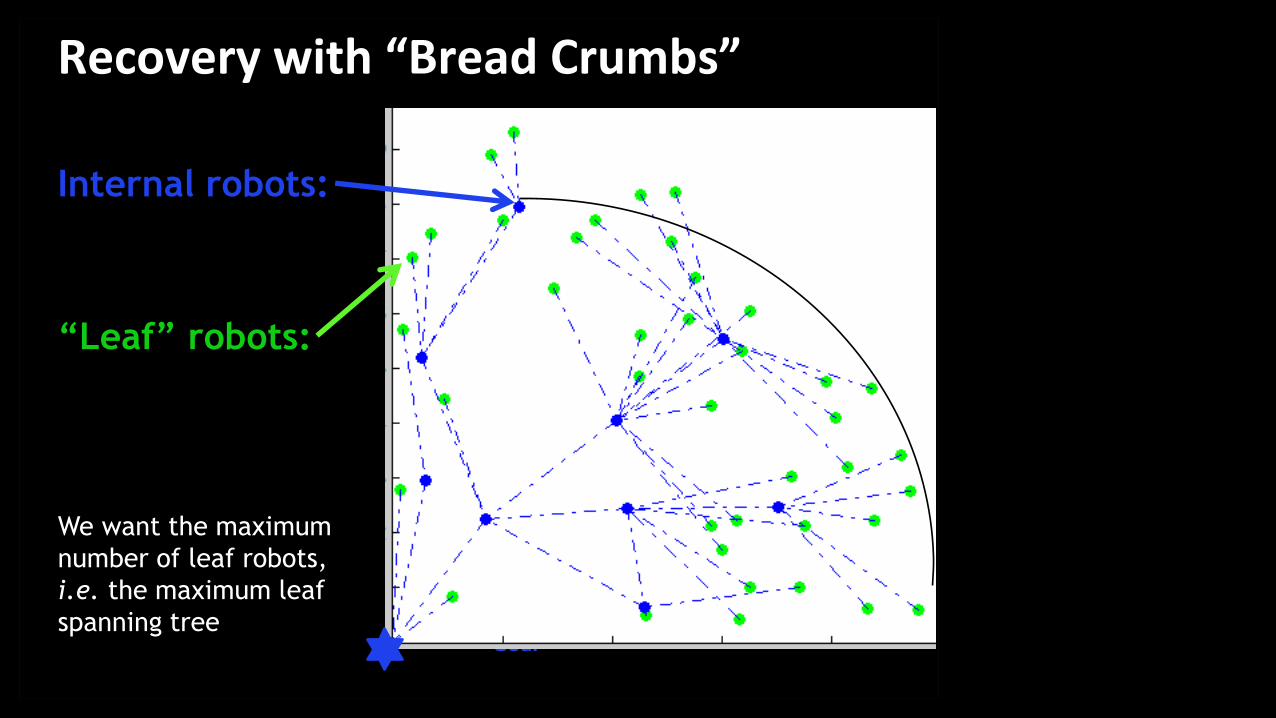
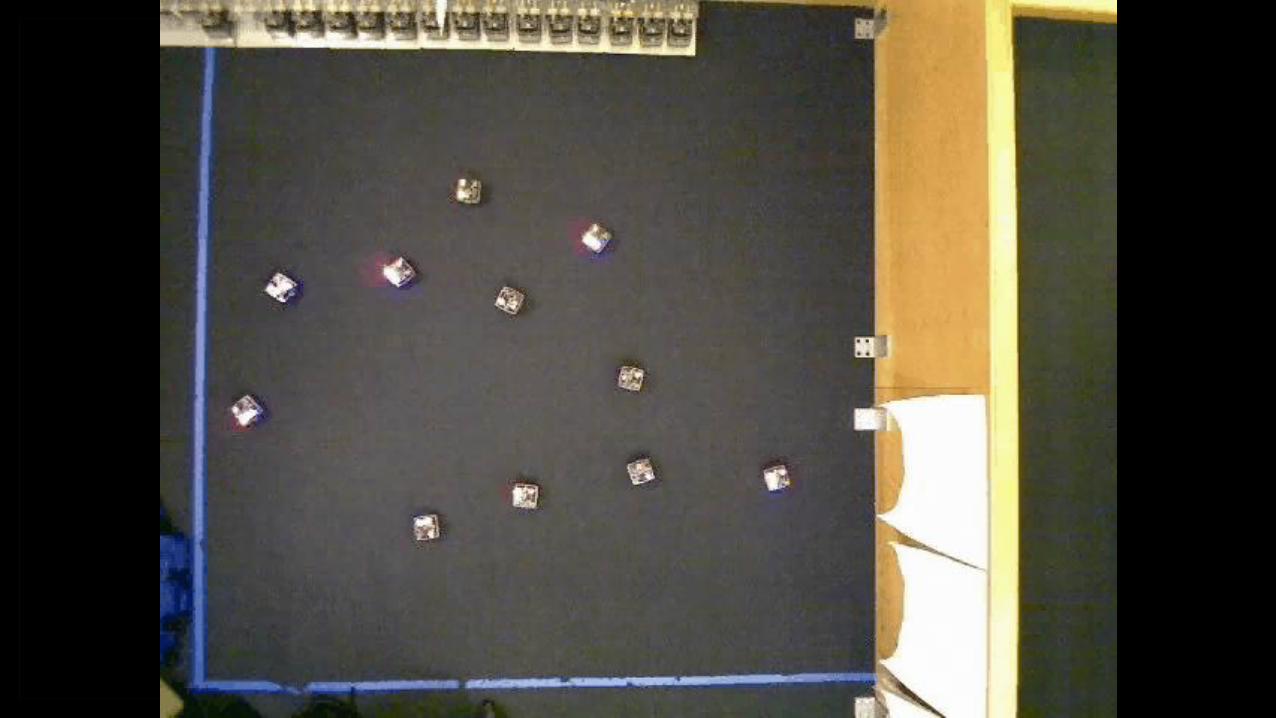
Recovery with “Bread Crumbs”
“Leaf” robots:
Goal
Internal robots:
We want the maximum
number of leaf robots,
i.e. the maximum leaf
spanning tree
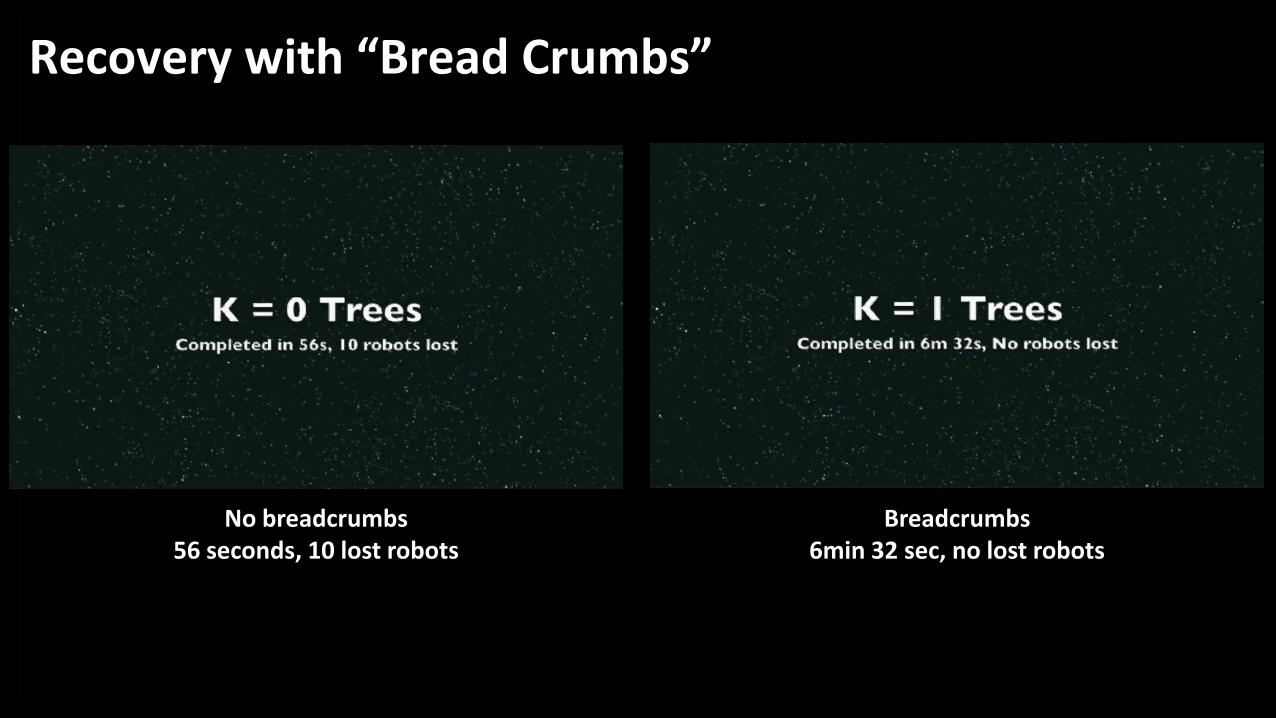
Recovery with “Bread Crumbs”
2-DMLST Recovered 97.2% of 17 robots in 9 trials • Hardware issues/physical interference.
• One case of odd communications failure
No breadcrumbs 56 seconds, 10 lost robots
Breadcrumbs 6min 32 sec, no lost robots
Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics

If you have enough robots, you can transform the problem of measuring the environment…
Boundary Detection
…to one of measuring the
robots

Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics

Physical Bubble Sort
Goal: Sort the robots by their robot ID
5
2
9

Physical Bubble Sort
Goal: Sort the robots by their robot ID
2
9
3
5
7

Physical Bubble Sort
Goal: Sort the robots by their robot ID
2
9
3
5
7

Physical Bubble Sort
Goal: Sort the robots by their robot ID
2
9
3
5 7

Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics

Multi-Robot Manipulation

Multi-Robot Manipulator Design

Multi-Robot Manipulation: Gripper

Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics

Seeley, T.D., 1995. The Wisdom
of the Hive. Harvard University
Press: Cambridge, MA
Nectar Collection in Honeybees

Honeybee Computation
Honeybee workers share food all the time, computing a global average. This lets an individual worker know
when the hive is hungry by measuring when she is hungry.

Time step person 1 person 2 person 3 person 4 person 5 person 6 person 7 person 8
1 30.0 10.0 90.0 110.0 40.0 120.0 80.0 40.0
2 20.0 20.0 100.0 100.0 80.0 80.0 60.0 60.0
3 40.0 60.0 60.0 90.0 90.0 70.0 70.0 40.0
4 50.0 50.0 75.0 75.0 80.0 80.0 55.0 55.0
5 52.5 62.5 62.5 77.5 77.5 67.5 67.5 52.5
6 57.5 57.5 70.0 70.0 72.5 72.5 60.0 60.0
7 58.8 63.8 63.8 71.3 71.3 66.3 66.3 58.8
8 61.3 61.3 67.5 67.5 68.8 68.8 62.5 62.5
9 61.9 64.4 64.4 68.1 68.1 65.6 65.6 61.9
10 63.1 63.1 66.3 66.3 66.9 66.9 63.8 63.8
11 63.4 64.7 64.7 66.6 66.6 65.3 65.3 63.4
12 64.1 64.1 65.6 65.6 65.9 65.9 64.4 64.4
13 64.2 64.8 64.8 65.8 65.8 65.2 65.2 64.2
14 64.5 64.5 65.3 65.3 65.5 65.5 64.7 64.7
15 64.6 64.9 64.9 65.4 65.4 65.1 65.1 64.6
16 64.8 64.8 65.2 65.2 65.2 65.2 64.8 64.8
17 64.8 65.0 65.0 65.2 65.2 65.0 65.0 64.8
18 64.9 64.9 65.1 65.1 65.1 65.1 64.9 64.9
19 64.9 65.0 65.0 65.1 65.1 65.0 65.0 64.9
20 64.9 64.9 65.0 65.0 65.1 65.1 65.0 65.0
21 65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0
Simulation Results:
0
10
20
30
40
50
60
70
80
90
100
110
120
1 6 11 16 21 26 31 36
person 1
person 2
person 3
person 4
person 5
person 6
person 7
person 8

Partial Proof:

Multi-Robot Systems Transform Logistics Problems
Problem Multi-Robot
Transformative Property Transformed Problem
Exploration Population Dispersion Exploration
Mapping Local Network Geometry Boundary Detection
Organization Parallel Operation Sorting
Collaboration Scalable Response Ant-Like Manipulation
Decision Making Distributed Computation Honey Bee Economics
Part IV: Conclusion

Summary
1. Robots are here, and they’re useful
2. Multi-Robot Systems offer unique advantages for Logistics
3. Multi-Robot Systems require different techniques for control
4. Multi-Robot Systems can provide transformative solutions

end