
Riccarda Rossi Lezione 1riccarda-rossi.unibs.it/Teaching/ANALISI-FUNZIONALE/lezI_af.pdf · Spazi...
31
Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici Analisi funzionale Riccarda Rossi Lezione 1 Riccarda Rossi Lezione 1 Analisi funzionale
Transcript of Riccarda Rossi Lezione 1riccarda-rossi.unibs.it/Teaching/ANALISI-FUNZIONALE/lezI_af.pdf · Spazi...

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Analisi funzionale
Riccarda Rossi
Lezione 1
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Programma
Scopo del corso: studiare le proprieta degli spazi di funzioni, che sono deglispazi vettoriali di dimensione infinita.
1. Richiami sugli spazi vettoriali;
2. esempi di sp. vett. di dimensione finita & infinita
3. proprieta topologiche degli sp. vett., valide in dimensione finita e NONin dimensione infinita
4. motivazioni per l’analisi funzionale
5. spazi topologici
6. spazi metrici
Riccarda Rossi Lezione 1
Analisi funzionale
Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
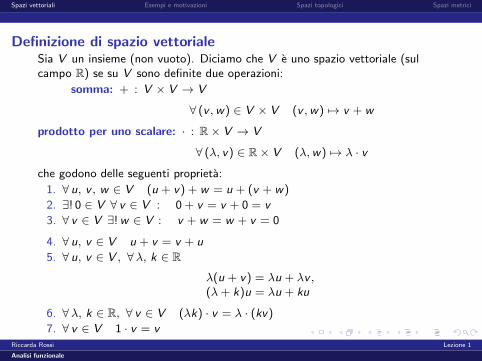
Definizione di spazio vettorialeSia V un insieme (non vuoto). Diciamo che V e uno spazio vettoriale (sulcampo R) se su V sono definite due operazioni:
somma: + : V × V → V
∀ (v ,w) ∈ V × V (v ,w) 7→ v + w
prodotto per uno scalare: · : R× V → V
∀ (λ, v) ∈ R× V (λ,w) 7→ λ · v
che godono delle seguenti proprieta:
1. ∀ u, v , w ∈ V (u + v) + w = u + (v + w)
2. ∃! 0 ∈ V ∀ v ∈ V : 0 + v = v + 0 = v
3. ∀ v ∈ V ∃! w ∈ V : v + w = w + v = 0
4. ∀ u, v ∈ V u + v = v + u
5. ∀ u, v ∈ V , ∀λ, k ∈ R
λ(u + v) = λu + λv ,(λ+ k)u = λu + ku
6. ∀λ, k ∈ R, ∀ v ∈ V (λk) · v = λ · (kv)
7. ∀ v ∈ V 1 · v = vRiccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Applicazioni lineari (I)
DefinizioneSiano V , W due sp. vettoriali. Un’applicazione L : V →W si dice lineare se
∀ v , w ∈ V , ∀λ, k ∈ R : L(λu + kv) = λL(u) + kL(v).
• Sia L : V →W un’applicazione lineare. Allora
L(0V ) = 0W
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Applicazioni lineari (II)
• Sia V uno sp. vettoriale e L : V → R un’applicazione (lineare): per Luseremo il termine funzionale (lineare).
• Siano V , W due sp. vettoriali. Un’applicazione lineare L : V →W si diceisomorfismo se L e invertibile: allora gli spazi V e W si dicono isomorfi.
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Dimensione di uno spazio vettoriale (I)
DefinizioneSia V uno sp. vett. Diciamo che V ha dimensione finita n (scrivendodim(V ) = n), se
V ha una base finita di n elementi {v1, v2, . . . , vn}cioe
I i vettori v1, v2, . . . , vn ∈ V sono linearmente indipendenti
I la n-upla {v1, v2, . . . , vn} costituisce un sistema di generatori per V
Riccarda Rossi Lezione 1
Analisi funzionale
Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
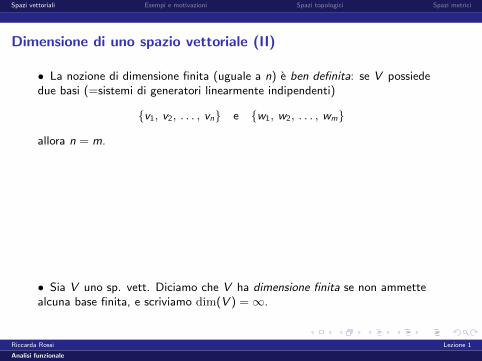
Dimensione di uno spazio vettoriale (II)
• La nozione di dimensione finita (uguale a n) e ben definita: se V possiededue basi (=sistemi di generatori linearmente indipendenti)
{v1, v2, . . . , vn} e {w1, w2, . . . , wm}
allora n = m.
• Sia V uno sp. vett. Diciamo che V ha dimensione finita se non ammettealcuna base finita, e scriviamo dim(V ) =∞.
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Esempi (I)
Sia V uno sp. vett. di dimensione finita n ∈ N. Allora
V e isomorfo a Rn
ciaociaociaociaociaociaociaociao
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Esempi (II)
Consideriamo l’insieme
`1 := { successioni {an}n∈N ⊂ R :∞∑n=1
|an| <∞}.
• `1 e uno sp. vett. con le operazioni:
somma:∀ {an}n, {bn}n ∈ `1, {an}n + {bn}n := {an + bn}n
prodotto per uno scalare:
∀ {an}n ∈ `1, ∀λ ∈ R λ · {an}n := {λan}n.
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
`1 ha dimensione infinita
In `1 esistono infiniti vettori linearmente indipendenti: sono le successioni
e1 = {1, 0, 0, 0, . . .},e2 = {0, 1, 0, 0, . . .},.................en = {0, 0, 0, 0, n, . . .}.................
ciaociaociaociaociaociao
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Esempi (III)
Consideriamo l’insieme di funzioni
C0([0, 2π]) := {f : [0, 2π]→ R : f e continua su [0, 2π]}
• C0([0, 2π]) e uno sp. vett. con le operazioni:
somma:
∀ f , g ∈ C0([0, 2π]), (f + g)(x) := f (x) + g(x), x ∈ [0, 2π]
prodotto per uno scalare:
∀ f ∈ C0([0, 2π]), ∀λ ∈ R (λ · f )(x) := λf (x), x ∈ [0, 2π].
• C0([0, 2π]) ha dimensione infinita: le funzioni
1, sin(x), cos(x), sin(2x), cos(2x), . . . , sin(nx), cos(nx), . . .
costituisono un sistema di infiniti vettori linearmente indipendenti inC0([0, 2π]).
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Ricapitoliamo
I V con dim(V ) = Rn
I `1
I C0([0, 2π])
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Motivazioni per la topologia e l’analisi funzionale
♣ Alcune proprieta degli sp. vett. di dimensione finita, che non valgono in sp.vett. di dimensione infinita:
I continuita di funzionali lineari
I proprieta di “compattezza”
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Continuita di funzionali lineari (I)
Siano V uno sp. vett. con dim(V ) = n e L : V → R un funzionale lineare.Allora L e continuo su V .ciaociaociaociaociaociaociaociaociao
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Continuita di funzionali lineari (II)
Dimostriamo che L : Rn → R lineare e continuo in ogni x0 ∈ Rn. ciaociaociaociaociaociaociaociaociaociaociao• Se V ha dimensione infinita e L : V → R e un funzionale lineare, e ingenerale falso che L sia continuo.
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Proprieta di “compattezza”
Siano V uno sp. vett. con dim(V ) = n. Allora ogni successione limitata di Vammette una sottosuccessione convergente. ciaociaociaociaociaociaociaociaociao
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Problemi di fondo (I)
I Che cosa significa che un funzionale (definito su uno spazio di dimensioneinfinita) e continuo??
I Che cosa significa che una successione (in uno spazio di dimensioneinfinita) e convergente?
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Problemi di fondo (II)
I nozioni di convergenza in spazi funzionali ciaociaociaociaociaociaociao
I la nozione di continuita di applicazioni e strettamente legata alla nozionedi convergenza di succcessioni
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Discussione euristica sulla nozione di continuita
Riccarda Rossi Lezione 1
Analisi funzionale
Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
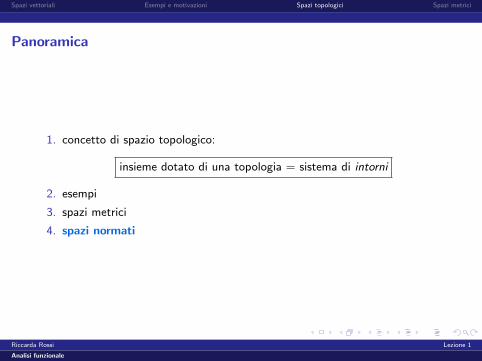
Panoramica
1. concetto di spazio topologico:
insieme dotato di una topologia = sistema di intorni
2. esempi
3. spazi metrici
4. spazi normati
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Definizione di spazio topologico
Sia X un insieme (non vuoto).
• Chiamiamo spazio topologico una coppia (X , I), con
I : X ⇒ 2X
∀ x ∈ X x 7→ I(x) = famiglia di sottoinsiemi I di X
in modo che valgano le seguenti proprieta:
1. ∀ x ∈ X , ∀ I ∈ I(x) si ha x ∈ I
2. ∀ x ∈ X , ∀ I ∈ I(x) e ∀Y ⊂ X con Y ⊃ I , si ha Y ∈ I(x)
3. ∀ x ∈ X , ∀ I , I ′ ∈ I(x) si ha I ∩ I ′ ∈ I(x)
4. ∀ x ∈ X , ∀ I ∈ I(x) ∃ I0 ∈ I(x) tale che I0 ⊂ I e I0 ∈ I(y) per ogni y ∈ I0.
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Non unicita della topologia
Su X insieme non vuoto e in generale possibile assegnare almeno due diversetopologie.
La topologia banale ciaociaociaociaociaociao
La topologia discreta
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Topologie su Rn
I La topologia banale
I La topologia discreta
I La topologia euclidea
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Confronto fra topologie
Sia X un insieme (non vuoto) dotato di due topologie I′ e I′′. Diciamo che I′ emeno fine di I′′ (o I′′ e piu fine di I′), se
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Spazi metrici
DefinizioneSia X un insieme (non vuoto): chiamiamo metrica (o distanza) su X unafunzione d : X × X → R verificante le seguenti condizioni
d(x , y) ≥ 0 ∀ x , y ∈ X
d(x , y) = 0 ⇔ x = y ∀ x , y ∈ X
d(x , y) = d(y , x) ∀ x , y ∈ X
d(x , z) ≤ d(x , y) + d(y , z) ∀ x , y , z ∈ X
Dati x , y ∈ X , chiamiamo distanza di x da y il numero d(x , y), e spaziometrico la coppia (X , d).
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Osservazioni
• ciaociaociaociaociao• ciaociaociaociaociao•
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Spazi topologici metrizzabili
• Sia X un insieme non vuoto. In generale su X e possibile definire diversemetriche. ciaociaociaoNon sempre metriche diverse danno luogo a topologie diverse.
DefinizioneSia X 6= ∅ dotato di due metriche d1 e d2. Diciamo che d1 e d2 sonotopologicamente equivalenti se esse inducono su X la stessa topologia.
Riccarda Rossi Lezione 1
Analisi funzionale
Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
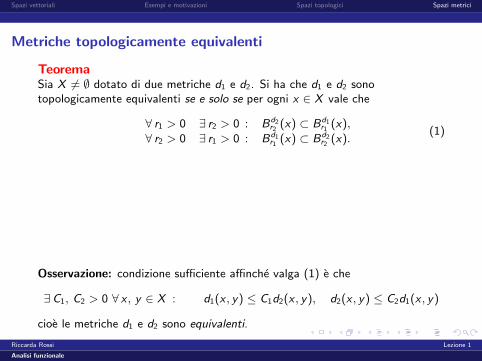
Metriche topologicamente equivalenti
TeoremaSia X 6= ∅ dotato di due metriche d1 e d2. Si ha che d1 e d2 sonotopologicamente equivalenti se e solo se per ogni x ∈ X vale che
∀ r1 > 0 ∃ r2 > 0 : Bd2r2 (x) ⊂ Bd1
r1 (x),∀ r2 > 0 ∃ r1 > 0 : Bd1
r1 (x) ⊂ Bd2r2 (x).
(1)
ciaociaociaociaociaociaociaoOsservazione: condizione sufficiente affinche valga (1) e che
∃C1, C2 > 0 ∀ x , y ∈ X : d1(x , y) ≤ C1d2(x , y), d2(x , y) ≤ C2d1(x , y)
cioe le metriche d1 e d2 sono equivalenti.
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Esempio
Sia X 6= ∅. Allora la funzione d : X × X → [0,+∞) data da
d(x , y) =
{0 se x = y ,
1 se x 6= y ,
I e una distanza su X
I induce la topologia discreta su X
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Topologia euclidea su Rn (I)
• La topologia euclidea su Rn e indotta dalla metrica euclidea
d2(−→x ,−→y ) :=
(n∑
i=1
|xi − yi |2)1/2
∀−→x , −→y ∈ Rn
• Su Rn sono definite le infinite metriche dp, con p ∈ R, 1 ≤ p <∞
dp(−→x ,−→y ) :=(∑n
i=1 |xi − yi |p)1/p ∀−→x , −→y ∈ Rn se 1 ≤ p <∞,
d∞(−→x ,−→y ) := max{|xi − yi | : i = 1, . . . , n} ∀−→x , −→y ∈ Rn se p =∞.
Riccarda Rossi Lezione 1
Analisi funzionale

Spazi vettoriali Esempi e motivazioni Spazi topologici Spazi metrici
Topologia euclidea su Rn (II)
Le metriche dp sono tutte topologicamente equivalenti, e quindi inducono tuttela topologia euclidea.
Riccarda Rossi Lezione 1
Analisi funzionale


















