Research Article Study of Swarm Behavior in Modeling and Simulation...
7
Hindawi Publishing Corporation Modelling and Simulation in Engineering Volume 2013, Article ID 142165, 6 pages http://dx.doi.org/10.1155/2013/142165 Research Article Study of Swarm Behavior in Modeling and Simulation of Cluster Formation in Nanofluids Mohammad Pirani, Hassan Basirat Tabrizi, and Ali Farshad Department of Mechanical Engineering, Amirkabir University of Technology, P.O. BOX 15875-4413, Tehran 159163411, Iran Correspondence should be addressed to Hassan Basirat Tabrizi; [email protected] Received 8 April 2012; Revised 4 January 2013; Accepted 10 January 2013 Academic Editor: Azah Mohamed Copyright © 2013 Mohammad Pirani et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Modeling the multiagents cooperative systems inspired from biological self-organized systems in the context of swarm model has been under great considerations especially in the field of the cooperation of multi robots. ese models are trying to optimize the behavior of artificial multiagent systems by introducing a consensus, which is a mathematical model between the agents as an intelligence property for each member of the swarm set. e application of this novel approach in the modeling of nonintelligent multi agents systems in the field of cohesion and cluster formation of nanoparticles in nanofluids has been investigated in this study. is goal can be obtained by applying the basic swarm model for agents that are more mechanistic by considering their physical properties such as their mass, diameter, as well as the physical properties of the flow. Clustering in nanofluids is one of the major issues in the study of its effects on heat transfer. Study of the cluster formation dynamics in nanofluids using the swarm model can be useful in controlling the size and formation time of the clusters as well as designing appropriate microchannels, which the nanoparticles are plunged into. 1. Introduction Swarming, as a novel approach in modeling the dynamics of multiagent systems, inspires from the behavior of biological self-organized and decentralized systems that cooperate to do a special task. Decentralization means that the swarm has no central leader or boss and each member does its work with a kind of imitation. First attempts to describe the behavior of such biological systems from the mathematical points of view belong to Breder [1] who developed the motion equation of schools of fish and claimed that the motion of each member is the resultant of a long-range attraction and short-range repulsion components. Gazi and Passino [2, 3] described the stability of swarm systems. Many efforts have been investigated to introduce the behavior of multiagent systems whose members have mech- anical interaction with each other. It means they may collide to one another and exchange some momentum or arrange in special configurations that can be seen in cluster formations from multiphase and granular flows to nanofluids. A particle dynamic description of solid particles in multiphase flows is one of the aspects of multiagent mechanical systems. erefore, many attempts were dedicated to describe the behavior of particles in multiphase flows (see Hase [4], Li and Kuipers [5]). Dorigo et al. [6] introduced an optimization method based on the dynamics of the swarm of ant colonies. e essence of the swarm model is to introduce a consensus between the agents in the form of the summation of attraction and repulsion components between the agents. ere have been some efforts to introduce the interactions between the particles as an algebraic summation of the attraction and repulsion coefficients. Sadus [7] proposed an experimental correlation as a potential field for nonpolar particles com- prises of attraction and repulsion terms. Zohdi [8] proposed the idea of breaking all of the interactions between particles in a multiphase flow into four major forces, for example, thermal force, drag force, inter particle contact force, and near field force. He modeled the near field force with a linear combination of an attraction and repulsion components just as what is considered in the swarm model.
Transcript of Research Article Study of Swarm Behavior in Modeling and Simulation...

Hindawi Publishing CorporationModelling and Simulation in EngineeringVolume 2013 Article ID 142165 6 pageshttpdxdoiorg1011552013142165
Research ArticleStudy of Swarm Behavior in Modeling and Simulation ofCluster Formation in Nanofluids
Mohammad Pirani Hassan Basirat Tabrizi and Ali Farshad
Department of Mechanical Engineering Amirkabir University of Technology PO BOX 15875-4413 Tehran 159163411 Iran
Correspondence should be addressed to Hassan Basirat Tabrizi hbasiratautacir
Received 8 April 2012 Revised 4 January 2013 Accepted 10 January 2013
Academic Editor Azah Mohamed
Copyright copy 2013 Mohammad Pirani et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Modeling the multiagents cooperative systems inspired from biological self-organized systems in the context of swarm model hasbeen under great considerations especially in the field of the cooperation of multi robots These models are trying to optimizethe behavior of artificial multiagent systems by introducing a consensus which is a mathematical model between the agents as anintelligence property for each member of the swarm set The application of this novel approach in the modeling of nonintelligentmulti agents systems in the field of cohesion and cluster formation of nanoparticles in nanofluids has been investigated in this studyThis goal can be obtained by applying the basic swarm model for agents that are more mechanistic by considering their physicalproperties such as their mass diameter as well as the physical properties of the flow Clustering in nanofluids is one of the majorissues in the study of its effects on heat transfer Study of the cluster formation dynamics in nanofluids using the swarm modelcan be useful in controlling the size and formation time of the clusters as well as designing appropriate microchannels which thenanoparticles are plunged into
1 Introduction
Swarming as a novel approach in modeling the dynamics ofmultiagent systems inspires from the behavior of biologicalself-organized and decentralized systems that cooperate to doa special task Decentralization means that the swarm has nocentral leader or boss and each member does its work witha kind of imitation First attempts to describe the behavior ofsuch biological systems from themathematical points of viewbelong to Breder [1] who developed the motion equation ofschools of fish and claimed that the motion of each memberis the resultant of a long-range attraction and short-rangerepulsion components Gazi and Passino [2 3] described thestability of swarm systems
Many efforts have been investigated to introduce thebehavior of multiagent systems whose members have mech-anical interaction with each other It means they may collideto one another and exchange some momentum or arrange inspecial configurations that can be seen in cluster formationsfrom multiphase and granular flows to nanofluids A particledynamic description of solid particles in multiphase flows
is one of the aspects of multiagent mechanical systemsTherefore many attempts were dedicated to describe thebehavior of particles inmultiphase flows (see Hase [4] Li andKuipers [5])
Dorigo et al [6] introduced an optimization methodbased on the dynamics of the swarm of ant colonies Theessence of the swarm model is to introduce a consensusbetween the agents in the formof the summation of attractionand repulsion components between the agents There havebeen some efforts to introduce the interactions between theparticles as an algebraic summation of the attraction andrepulsion coefficients Sadus [7] proposed an experimentalcorrelation as a potential field for nonpolar particles com-prises of attraction and repulsion terms Zohdi [8] proposedthe idea of breaking all of the interactions between particlesin a multiphase flow into four major forces for examplethermal force drag force inter particle contact force andnear field force He modeled the near field force with a linearcombination of an attraction and repulsion components justas what is considered in the swarm model
2 Modelling and Simulation in Engineering
Nanofluids are used in many applications because oftheir specific characteristics Their capability to enhance theheat transfer is one of those most obvious characteristicsVarious kinds of nanoparticles used for these applicationssuch as Al
2O3 Fe3O4 and CuO Increasing the heat transfer
depends on the shape and the size of the particles and theirvolume fraction Decreasing the size of the nanoparticlescauses the conducting heat transfer coefficient to increase[9ndash13] Maıga et al [14] and Chandrasekar et al [15] alsoinvestigated the effect of the host liquid on the heat transferby comparing water-Al
2O3and the Glycol-Al
2O3nanofluids
Brownian motion of the particles and cluster formation innanofluids are the major issues in the studies of nanofluidsaccording to the important effect of their size on the heattransfer rate Cluster formation causes the viscosity of nanofluid and thermal conductivity to change [16ndash19] Althoughthere have been some efforts in modeling the behavior ofnanoparticles in nanofluids no special research has beendone to describe the cohesion and cluster formations of theseparticles analytically andmost of these workswere numericalor experimental approach to this point
This study proposes a model for cluster formation of thenanoparticles in nanofluids and discusses about their sizeaccording to the interparticle forces Model is based on theswarm model which enables us to make a better control onthe cluster formation phenomenon by knowing the controlvariables of the system In addition this model can beused for analyzing the cohesiveness of nanorobot probes asnanoparticles injected into the blood vessels [20] By knowingthe cluster size of the swarm set as well as the diameter ofthe vessel one can easily compute the number of nano robotprobes participating in the cohesion task
2 Swarm Model
A swarm system consists of119873members withmass119898 for eachindividual who are placed in an 119899-dimensional Euclideanspace The motion equation of each member of the swarm inthe general form can be written as
119898 119903119894+ 119888 119903119894
=
119873
sum
119895=1119895 = 119894
(minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
) (119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) minus 119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817))
(1)
In this equation 119891119886(119903119894minus 119903119895) denotes the attraction between
member 119894 with member 119895 and 119891119903(119903119894minus 119903119895) represents the
repulsion between the pair 119894 and 119895 Thus the dynamics ofmember 119894 depend on the resultant of attraction and repulsionforces between 119894th and other 119873 minus 1 members in the systemSince the attraction and repulsion forces behave like a springthey are called spring shape forcesTherefore (1) recalls somegeneralized form of a mass spring and damper oscillatorCoefficient 119888 can be assumed as a damper constant for such asystem and is necessary for the stability of the system
Nowdefine a special class of such attraction and repulsionfunctions to convert (1) into
119898 119903119894+ 119888 119903119894
=
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(11988610038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205741
minus 11988710038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205742
)
(2)
Here 119886 and 119887 are the attraction and repulsion coefficientsrespectively 120574
1and 120574
2are some positive real numbers and
their values depend on the physics of the system whichwill be described in the following sections In order toapply this equation for more real mechanical agents such asnanoparticles in nano fluid flows it is necessary to definesome appropriate attraction and repulsion functions wellmatched with the physics of the problem
21 Adding Diameter to Each Member In order to inducedimension or diameter to the point-shaped members wemust conduct a strategy to inhibit particles to obtain samecoordinates in space In other words they should not beoverlap on each other Therefore it is necessary to define arepulsion function that prohibits the distance to be zero oreven approaches to zero Such a repulsion function is calledunbounded repulsion [3] Thus the degree of the repulsionfunctionrsquos denominator or pole should be greater than oneSuch a function can be defined as
lim119903119894minus119903119895rarr0+
119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817)10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817= infin (3)
This condition inhibits particles to reduce their distance tozero It can be extended tomore general that we can introducea function that inhibitsmembers to be closer than a particulardistance like 119862 This is obtainable with just a modification inthe above limit into the following limit
lim119903119894minus119903119895rarr119862
119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817)10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817= infin (4)
119862 is the distance between the centers of twomembers or theirdiameter if they are spherical shaped particles Therefore therepulsion function is defined as follows
119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) =
119887
(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817minus 119862)2 (5)
Thus the value of 1205742in (2) will be equal to 2
A long-range attraction function should be defined aswell Since the effects of long-rage attraction function areconsiderable through the long distances this function shouldhave direct ratio with the distance between each coupleOn the other hand in realistic swarm systems when twomembers become too far apart from one another theylose and forget their effects Therefore a relative long-rangeattraction function should satisfy what follows
lim119903119894minus119903119895rarrinfin
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) = 0 (6)
Modelling and Simulation in Engineering 3
The infinity in above equation is a mathematical infinityIn other words the physical infinity can be determinedaccording to the application For example it can be assumed100 times longer than the particlersquos diameter By defining 119897 =100119889 in which 119889 is the agentrsquos diameter so
lim119903119894minus119903119895rarr 119897
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) = 0 (7)
For obtaining this in mind the basic model that indicateseach agent should interact with all other agents It will bemodified into the case each agent interacts with some agentsin its neighborhood which is according to the sensitivity ofthe agent for receiving the long-range attraction signals
Therefore the attraction function can be defined as
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) =
119886
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
(8)
and the value of 1205741in (2) will be equal to 1
It is worth to mention that this attraction function iscalled relative attraction function for long-range relative tothe repulsion function According to (8) it not only has directratio with distance but also has an inverse ratio with itNevertheless this inverse ratio is in the first power Thusit can be concluded this attraction function is long rangerelative to the repulsion that has an inverse ratio with thesecond power of distance
22 Adding Environmental Effects In common swarm mod-els the environmental effects are considered as well Theseeffects are modeled as a profile that can attract or repelmembers In fact this profile is considered as a simulationof nutrient that attracts member to itself or as a modelof toxin which repels members far apart However it canbe interpreted in a more general case as a potential fieldexerting on eachmember from the environmentThemotionof individuals will be through the opposite direction of theprofilersquos gradient
In order to add this effect into our model we considereda potential function like 119892(sdot) 119877119899 rarr 119877 and rewrite (1) asfollows
119903119894= minusnabla119903119894
119892 (119903119894) +
119873
sum
119895=1119895 = 119894
119891 (119903119894minus 119903119895) (9)
The ambient profile function can be interpreted in manykinds In this paper we use the plane profile as
119892 (119903) = 119860119879119903 + 119887 (10)
Then the equation of motion regarding the environmentaleffect will be
119903119894+1
119898119894
119903119894
=1
119898119894
(
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus119887
(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817minus 119862)2))
minus nabla119903119894
119892 (119903119894)
(11)
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Particle 1Particle 2Particle 3
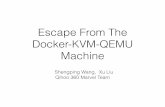
Figure 1 Two-dimensional simulation of (11) for three particles119898119894= 2 119886 = 100 119887 = 10 and nabla
119903119894119892(119903119894) = 2
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Particle 1Particle 2Particle 3
Figure 2 Two-dimensional simulation of (11) for three particles119898119894= 2 119886 = 10 119887 = 100 and nabla
119903119894119892(119903119894) = 2
Two simulation examples are provided in Figures 1 and 2Consider the effect of the attraction and the repulsioncoefficients in the convergence radius of the particles In bothcases the plane profile with nabla119892(119903) = 2 is assumed
3 Dimensional Analysis
In order to analyze (1) and apply it for our special case it isnecessary to make a physical sense about each term in thatequation For simplicity and without losing the generality
4 Modelling and Simulation in Engineering
assume the swarm system consists of just two membersTherefore the sigma sign in (1) disappears and we have
119898 119903 + 119889 119903 = 119886119903minus1205741 minus 119887119903
minus1205742 (12)
Equation (12) is a nonlinear ordinary differential equationConstants 120574
1and 120574
2can be determined according to our
desire in choosing any kind of attraction and repulsioncomponents
It is time to apply physical properties of the system ofnanoparticles in the nano fluid which can be considered asnanorobot probes in the blood The viscosity of blood is tentimes higher than water and we can claim that the effect ofmass of each robot is negligible To prove this claim refer toexperimental and more realistic approaches Cavalcanti et al[20] investigated in an experiment 1012 nanorobots with thetotal mass of just 02 gram in 5 lit bloods of a typical adult[21 22]
Since the ratio of inertia force to the viscous force is adimensionless number called the Reynolds number which is
Reynolds =119889120588120592
120583 (13)
Here 119889 120588 120584 and 120583 are the diameter of the particle thedensity of the fluid the average velocity of the flow and thedynamic viscosity of the flow respectively
The velocity of the flow in a small blood vessel is assumedabout 1mmsThe value for the density and viscosity of bloodplasma is
120588 = 1 grcm3 120583 = 10minus2 grcm sdot s (14)
According to the above values the Reynolds number for ananorobot with the diameter of 1 120583m is
Reynolds =119889120588120592
120583asymp 10minus3 (15)
For the case of water-Al2O3 nanofluids the Reynoldrsquos number
value is about 10minus4 This Reynolds number indicates that theviscosity of the host liquid is at least 119874(103) higher than themass of the particles
Consider a dimensionless time 120591 as proposed in [23]
120591 =119905
119879 (16)
A new derivative with respect to 120591 follows
119903 =119889119903
119889119905=119889119903
119889120591
119889120591
119889119905=1
119879
119889119903
119889120591
119903 =1198892119903
1198891199052=119889
119889119905(1
119879
119889119903
119889120591) =
1
1198792
1198892119903
1198891205912
(17)
Substituting above relations into (12) gives
119898
1198792
1198892119903
1198891205912+119888
119879
119889119903
119889120591= 119886119903minus1205741 minus 119887119903
minus1205742 (18)
Dividing both sides by119898 yields
1
1198792
1198892119903
1198891205912+119888
119898119879
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (19)
Now choose the value of 119879 in order to satisfy the followingcondition
119888
119898119879= 119900 (1) (20)
An appropriate choice for 119879 can be 119879 = 119888119898So
1
1198792≪ 1 yields 119898
2
1198882≪ 1 997904rArr 119898
2≪ 1198882 (21)
This can be interpreted as expressing that the dampingcoefficient in (12) which is the viscosity of the fluid isvery strong or the mass is very small It exactly has thesame meaning with the small Reynolds number which wasmentioned above
In a precise sense define 120576 such that
120576 =1198982
1198882 (22)
Thus (19) becomes
1205761198892119903
1198891205912= minus
119889119903
119889120591+119886
119898119903minus1205741 minus119887
119898119903minus1205742 (23)
The character 120576 is too small so one can eliminate the righthand side as follows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 = 119891 (119903) (24)
The main question that naturally arises is that how muchprecise (24) can be and in what circumstances one can useit as a description of the system To answer this question weanalyzed the behavior of (23) in the phase space By defininga new parameter 119877 (23) will be
119889119903
119889120591= 119877
120576119889119877
119889120591= minus119877 +
119886
119898119903minus1205741 minus119887
119898119903minus1205742
(25)
By defining 119891(119903) = (119886119898) 119903minus1205741 minus (119887119898) 119903minus1205742 turns into
119889119903
119889120591= 119877
119889119877
119889120591=1
120576(119891 (119903) minus 119877)
(26)
By considering that the phase plane portraits this system andcurve 119862 119891(119903) minus 119877 = 0 in this planeThis curve demonstratesthe first-order system because the second equation in (26)equals to zero We claim that the actual second-order systemwill converge to this curve as time progress For provingconsider the actual curve starts from an119874(1) distance bellow
Modelling and Simulation in Engineering 5
the curve 119862 According to the second equation in (26) onehas 119889119877119889120591 = 119874(1120576) Therefore the curve suddenly jumpsinto 119891(119903) minus 119877 = 119874(120576) and as 120576 rarr 0 this region will beindistinguishable with 119862
From the above discussion one can conclude that thesystem in (26) can behave like a first order system but aftera time lag 119879 Before this time lag we are not allowed toeliminate the second-order derivative In other words thefirst order system behaves with a desired precision at 119905 gt 119879This is exactly what one expects from the system Since thedesired property of this system is its convergence radius astime approaching to infinity
Thus according to above analysis on (26) in the phasespace we can claim that (23) can be reduced into (24) asfollows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (27)
and in general form for many agents we have
119903119894=
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205741
minus119887
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205742
)
(28)
The convergence radius can be easily determined from (28)For example for the repulsion and attraction functions whichwere introduced in (5) and (8) respectively for the firstorder (28) Gazi and Passino [2] determined the maximumconvergence radius is not greater than 119887119886 This bound is forthe swarm set whose agents have no diameter In additionthis bound is independent to the number of the agents Toinclude the volume of each agent and the number of theagents participating in the cohesion task one need to modifythis bound To yield this consider119873 swarmmembers whichare accumulating in 3-dimensional spaces If all the agentsstick together to form a cluster the swarm volume size willbe
The swarm volume size = 431205871198623119873 (29)
If all these agents converge to a sphere the minimum radiusof such a sphere can be determined easily by equaling theaccumulated swarm volume and the volume of the sphere asfollows
4
31205871198623119873 lt
4
3120587119903min3997904rArr 119903min gt 119862
3radic119873 (30)
So the previous bound modifies to
The accurate size = 1198871198861198623radic119873 (31)
4 A Design Problem Finding the Number ofParticipating Nanorobot Probes
Consider a group of nanorobots in a blood vessel coop-erating for a special purpose that can be finding in somecancerous cells According to experimental notes 1012 robots
are injected through the veins [20] A typical adult has 5lit bloods Therefore the density of nano robots becomes2 times 10
minus4 nanorobots120583m3The maximum convergence radius for a swarm system
with these attraction and repulsion functions in (5) and (8)for maintaining the density constant according to (31) is
120576 lt119887
1198861198623radic119873 (32)
Therefore the density of nanorobots is
density = 119873
(43) 1205871205763=
119873
(43) 120587(1198623radic119873119887119886)
3=31198863
412058711988731198623
(33)
Equaling this formula with the experimental measured den-sity [20] of cooperative nanorobots in blood vessels gives
31198863
412058711988731198623= 2 times 10
minus4 Robot120583m3 (34)
Considering 1120583m diameter for each agent follows
(119886
119887)
3
= 2 times 10minus4times 4120587 times
1198623
3= 838 times 10
minus4 (35)
Then the ratio of attraction and repulsion coefficients is119886
119887= 0094 asymp 01 (36)
One of the important aspects of maximum convergenceradius in (31) is to determine the number of nanorobot agentswhich can accumulate in a vessel with respect to the diameterof the vessel For instance suppose that the diameter ofnanorobot cohesion cannot exceed a quarter of the diameterof the vein Hence one can easily calculate the maximumnumber of robots participate in cohesion Now assume thediameter of the vein is119863 = 800 120583m then
120576max =1198623radic119873119887
119886997904rArr 119889max =
21198623radic119873119887
119886=119863
4 (37)
As we derived a reasonable ratio of attraction and repulsionconstants for nano robots in blood it yields
119886
119887= 01 997904rArr
119887
119886= 10 119863 = 800 120583m 119862 = 1 120583m
119889max =21198623radic119873119887
119886= 20119862
3radic119873 =
119863
4= 200 120583m 997904rArr 119862 3radic119873
= 10 997904rArr 119873 = 1000Robots(38)
Itmeans that if the robot cohesion is forced to have a diameterless than a quarter of a vein diameter the maximum numbersof agents that can participate in the cohesion are 1000nanorobots
This example could be converted into a design problem ofmicro channels if it asks the diameter of the vessel by givingthe number of participating nanorobots
6 Modelling and Simulation in Engineering
5 Conclusion
In this study we discussed about the behavior dynamicsof nanoscale grains and particles moving in a host liquidAccording to this model the dynamics of each particledepend on the resultant forces between it and other particlesin its neighborhood that are in the form of attraction andrepulsion components One of the most important results ofthis model was to derive a convergence radius for particulateclustering in nanofluids that is one of the most importantphenomena in the field of the researches in micro- andnanofluids especially in the context of heat transfer
Acknowledgments
The authors would like to thankMilad Rakhsha fromAmirk-abir University of Technology Iran for bringing some usefulreferences in the field of nanofluidics Also thanks are toprofessorMichael Zavlanos fromDuke University NC USAfor his helpful comments
References
[1] C M Breder ldquoEquations descriptive of fish schools and otheranimal aggregationsrdquo Ecology vol 35 pp 361ndash370 1954
[2] V Gazi and K M Passino Swarm Stability and OptimizationSpringer New York NY USA 2011
[3] V Gazi and K M Passino ldquoA class of attractionsrepulsionfunctions for stable swarm aggregationsrdquo International Journalof Control vol 77 no 18 pp 1567ndash1579 2004
[4] W L Hase ldquoMolecular dynamics of clusters surfaces liquids ampinterfacesrdquo in Advances in Classical Trajectory Methods vol 4JAI press 1999
[5] J Li and J A M Kuipers ldquoGas-particle interactions in densegas-fluidized bedsrdquo Chemical Engineering Science vol 58 no3-6 pp 711ndash718 2003
[6] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics B vol 26 no 1 pp 29ndash41 1996
[7] R J Sadus Molecular Simulation of Fluids Theory Algorithmsand Object-Orientation) Elsevier New York NY USA 1999
[8] T I Zohdi ldquoParticle collision and adhesion under the influenceof near-fieldsrdquo Journal of Mechanics of Materials and Structuresvol 2 no 6 pp 1011ndash1018 2007
[9] K B Anoop T Sundararajan and S K Das ldquoEffect ofparticle size on the convective heat transfer in nanofluid inthe developing regionrdquo International Journal of Heat and MassTransfer vol 52 no 9-10 pp 2189ndash2195 2009
[10] HChang andYCChang ldquoFabrication ofAl2O3nanofluid by a
plasma arc nano particles synthesis systemrdquo Journal ofMaterialsProcessing Technology vol 207 no 1ndash3 pp 193ndash199 2008
[11] H Chen Y Ding and A Lapkin ldquoRheological behaviour ofnanofluids containing tube rod-like nanoparticlesrdquo PowderTechnology vol 194 no 1-2 pp 132ndash141 2009
[12] W Lu and Q Fan ldquoStudy for the particlersquos scale effect on somethermo physical properties of nano fluids by a simplifiedmolec-ular dynamics methodrdquo Engineering Analysis with BoundaryElements vol 32 no 4 pp 282ndash289 2008
[13] P K Namburu D K Das K M Tanguturi and R SVajjha ldquoNumerical study of turbulent flow and heat transfer
characteristics of nanofluids considering variable propertiesrdquoInternational Journal ofThermal Sciences vol 48 no 2 pp 290ndash302 2009
[14] S E B Maıga S J Palm C T Nguyen G Roy and NGalanis ldquoHeat transfer enhancement by using nanofluids inforced convection flowsrdquo International Journal ofHeat and FluidFlow vol 26 no 4 pp 530ndash546 2005
[15] MChandrasekar S Suresh andAChandra Bose ldquoExperimen-tal investigations and theoretical determination of thermal con-ductivity and viscosity of Al
2O3water nanofluidrdquo Experimental
Thermal and Fluid Science vol 34 no 2 pp 210ndash216 2010[16] M Chopkar S Kumar D R Bhandari P K Das and I
Manna ldquoDevelopment and characterization of Al2Cu and
Ag2Al nanoparticle dispersed water and ethylene glycol based
nanofluidrdquoMaterials Science and Engineering B vol 139 no 2-3 pp 141ndash148 2007
[17] B Ghasemi and S M Aminossadati ldquoBrownian motion ofnanoparticles in a triangular enclosure with natural convec-tionrdquo International Journal of Thermal Sciences vol 49 no 6pp 931ndash940 2010
[18] W Jiang G Ding H Peng and H Hu ldquoModeling of nanopar-ticlesrsquo aggregation and sedimentation in nanofluidrdquo CurrentApplied Physics vol 10 no 3 pp 934ndash941 2010
[19] N R Karthikeyan J Philip and B Raj ldquoEffect of clustering onthe thermal conductivity of nano fluidsrdquo Materials Chemistryand Physics vol 109 no 1 pp 50ndash55 2008
[20] A Cavalcanti T Hogg B Shirinzadeh and H C LiawldquoNanorobot communication techniques a comprehensive tuto-rialrdquo in Proceedings of the 9th International Conference on Con-trol Automation Robotics and Vision (ICARCV rsquo06) SingaporeDecember 2006
[21] R A Freitas Jr Basic Capabilities vol 1 of NanomedicineLandes Bioscience Georgetown Tex USA 1999
[22] R A Freitas Jr Biocompatibility vol 2A of NanomedicineLandes Bioscience Georgetown Tex USA 2003
[23] S H StrogatzNonlinear Dynamic and ChaosWith Applicationsto Physics Biology Chemistry and Engineering Addison-WesleyReading Mass USA 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Modelling and Simulation in Engineering
Nanofluids are used in many applications because oftheir specific characteristics Their capability to enhance theheat transfer is one of those most obvious characteristicsVarious kinds of nanoparticles used for these applicationssuch as Al
2O3 Fe3O4 and CuO Increasing the heat transfer
depends on the shape and the size of the particles and theirvolume fraction Decreasing the size of the nanoparticlescauses the conducting heat transfer coefficient to increase[9ndash13] Maıga et al [14] and Chandrasekar et al [15] alsoinvestigated the effect of the host liquid on the heat transferby comparing water-Al
2O3and the Glycol-Al
2O3nanofluids
Brownian motion of the particles and cluster formation innanofluids are the major issues in the studies of nanofluidsaccording to the important effect of their size on the heattransfer rate Cluster formation causes the viscosity of nanofluid and thermal conductivity to change [16ndash19] Althoughthere have been some efforts in modeling the behavior ofnanoparticles in nanofluids no special research has beendone to describe the cohesion and cluster formations of theseparticles analytically andmost of these workswere numericalor experimental approach to this point
This study proposes a model for cluster formation of thenanoparticles in nanofluids and discusses about their sizeaccording to the interparticle forces Model is based on theswarm model which enables us to make a better control onthe cluster formation phenomenon by knowing the controlvariables of the system In addition this model can beused for analyzing the cohesiveness of nanorobot probes asnanoparticles injected into the blood vessels [20] By knowingthe cluster size of the swarm set as well as the diameter ofthe vessel one can easily compute the number of nano robotprobes participating in the cohesion task
2 Swarm Model
A swarm system consists of119873members withmass119898 for eachindividual who are placed in an 119899-dimensional Euclideanspace The motion equation of each member of the swarm inthe general form can be written as
119898 119903119894+ 119888 119903119894
=
119873
sum
119895=1119895 = 119894
(minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
) (119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) minus 119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817))
(1)
In this equation 119891119886(119903119894minus 119903119895) denotes the attraction between
member 119894 with member 119895 and 119891119903(119903119894minus 119903119895) represents the
repulsion between the pair 119894 and 119895 Thus the dynamics ofmember 119894 depend on the resultant of attraction and repulsionforces between 119894th and other 119873 minus 1 members in the systemSince the attraction and repulsion forces behave like a springthey are called spring shape forcesTherefore (1) recalls somegeneralized form of a mass spring and damper oscillatorCoefficient 119888 can be assumed as a damper constant for such asystem and is necessary for the stability of the system
Nowdefine a special class of such attraction and repulsionfunctions to convert (1) into
119898 119903119894+ 119888 119903119894
=
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(11988610038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205741
minus 11988710038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205742
)
(2)
Here 119886 and 119887 are the attraction and repulsion coefficientsrespectively 120574
1and 120574
2are some positive real numbers and
their values depend on the physics of the system whichwill be described in the following sections In order toapply this equation for more real mechanical agents such asnanoparticles in nano fluid flows it is necessary to definesome appropriate attraction and repulsion functions wellmatched with the physics of the problem
21 Adding Diameter to Each Member In order to inducedimension or diameter to the point-shaped members wemust conduct a strategy to inhibit particles to obtain samecoordinates in space In other words they should not beoverlap on each other Therefore it is necessary to define arepulsion function that prohibits the distance to be zero oreven approaches to zero Such a repulsion function is calledunbounded repulsion [3] Thus the degree of the repulsionfunctionrsquos denominator or pole should be greater than oneSuch a function can be defined as
lim119903119894minus119903119895rarr0+
119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817)10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817= infin (3)
This condition inhibits particles to reduce their distance tozero It can be extended tomore general that we can introducea function that inhibitsmembers to be closer than a particulardistance like 119862 This is obtainable with just a modification inthe above limit into the following limit
lim119903119894minus119903119895rarr119862
119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817)10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817= infin (4)
119862 is the distance between the centers of twomembers or theirdiameter if they are spherical shaped particles Therefore therepulsion function is defined as follows
119891119903(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) =
119887
(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817minus 119862)2 (5)
Thus the value of 1205742in (2) will be equal to 2
A long-range attraction function should be defined aswell Since the effects of long-rage attraction function areconsiderable through the long distances this function shouldhave direct ratio with the distance between each coupleOn the other hand in realistic swarm systems when twomembers become too far apart from one another theylose and forget their effects Therefore a relative long-rangeattraction function should satisfy what follows
lim119903119894minus119903119895rarrinfin
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) = 0 (6)
Modelling and Simulation in Engineering 3
The infinity in above equation is a mathematical infinityIn other words the physical infinity can be determinedaccording to the application For example it can be assumed100 times longer than the particlersquos diameter By defining 119897 =100119889 in which 119889 is the agentrsquos diameter so
lim119903119894minus119903119895rarr 119897
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) = 0 (7)
For obtaining this in mind the basic model that indicateseach agent should interact with all other agents It will bemodified into the case each agent interacts with some agentsin its neighborhood which is according to the sensitivity ofthe agent for receiving the long-range attraction signals
Therefore the attraction function can be defined as
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) =
119886
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
(8)
and the value of 1205741in (2) will be equal to 1
It is worth to mention that this attraction function iscalled relative attraction function for long-range relative tothe repulsion function According to (8) it not only has directratio with distance but also has an inverse ratio with itNevertheless this inverse ratio is in the first power Thusit can be concluded this attraction function is long rangerelative to the repulsion that has an inverse ratio with thesecond power of distance
22 Adding Environmental Effects In common swarm mod-els the environmental effects are considered as well Theseeffects are modeled as a profile that can attract or repelmembers In fact this profile is considered as a simulationof nutrient that attracts member to itself or as a modelof toxin which repels members far apart However it canbe interpreted in a more general case as a potential fieldexerting on eachmember from the environmentThemotionof individuals will be through the opposite direction of theprofilersquos gradient
In order to add this effect into our model we considereda potential function like 119892(sdot) 119877119899 rarr 119877 and rewrite (1) asfollows
119903119894= minusnabla119903119894
119892 (119903119894) +
119873
sum
119895=1119895 = 119894
119891 (119903119894minus 119903119895) (9)
The ambient profile function can be interpreted in manykinds In this paper we use the plane profile as
119892 (119903) = 119860119879119903 + 119887 (10)
Then the equation of motion regarding the environmentaleffect will be
119903119894+1
119898119894
119903119894
=1
119898119894
(
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus119887
(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817minus 119862)2))
minus nabla119903119894
119892 (119903119894)
(11)
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Particle 1Particle 2Particle 3
Figure 1 Two-dimensional simulation of (11) for three particles119898119894= 2 119886 = 100 119887 = 10 and nabla
119903119894119892(119903119894) = 2
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Particle 1Particle 2Particle 3
Figure 2 Two-dimensional simulation of (11) for three particles119898119894= 2 119886 = 10 119887 = 100 and nabla
119903119894119892(119903119894) = 2
Two simulation examples are provided in Figures 1 and 2Consider the effect of the attraction and the repulsioncoefficients in the convergence radius of the particles In bothcases the plane profile with nabla119892(119903) = 2 is assumed
3 Dimensional Analysis
In order to analyze (1) and apply it for our special case it isnecessary to make a physical sense about each term in thatequation For simplicity and without losing the generality
4 Modelling and Simulation in Engineering
assume the swarm system consists of just two membersTherefore the sigma sign in (1) disappears and we have
119898 119903 + 119889 119903 = 119886119903minus1205741 minus 119887119903
minus1205742 (12)
Equation (12) is a nonlinear ordinary differential equationConstants 120574
1and 120574
2can be determined according to our
desire in choosing any kind of attraction and repulsioncomponents
It is time to apply physical properties of the system ofnanoparticles in the nano fluid which can be considered asnanorobot probes in the blood The viscosity of blood is tentimes higher than water and we can claim that the effect ofmass of each robot is negligible To prove this claim refer toexperimental and more realistic approaches Cavalcanti et al[20] investigated in an experiment 1012 nanorobots with thetotal mass of just 02 gram in 5 lit bloods of a typical adult[21 22]
Since the ratio of inertia force to the viscous force is adimensionless number called the Reynolds number which is
Reynolds =119889120588120592
120583 (13)
Here 119889 120588 120584 and 120583 are the diameter of the particle thedensity of the fluid the average velocity of the flow and thedynamic viscosity of the flow respectively
The velocity of the flow in a small blood vessel is assumedabout 1mmsThe value for the density and viscosity of bloodplasma is
120588 = 1 grcm3 120583 = 10minus2 grcm sdot s (14)
According to the above values the Reynolds number for ananorobot with the diameter of 1 120583m is
Reynolds =119889120588120592
120583asymp 10minus3 (15)
For the case of water-Al2O3 nanofluids the Reynoldrsquos number
value is about 10minus4 This Reynolds number indicates that theviscosity of the host liquid is at least 119874(103) higher than themass of the particles
Consider a dimensionless time 120591 as proposed in [23]
120591 =119905
119879 (16)
A new derivative with respect to 120591 follows
119903 =119889119903
119889119905=119889119903
119889120591
119889120591
119889119905=1
119879
119889119903
119889120591
119903 =1198892119903
1198891199052=119889
119889119905(1
119879
119889119903
119889120591) =
1
1198792
1198892119903
1198891205912
(17)
Substituting above relations into (12) gives
119898
1198792
1198892119903
1198891205912+119888
119879
119889119903
119889120591= 119886119903minus1205741 minus 119887119903
minus1205742 (18)
Dividing both sides by119898 yields
1
1198792
1198892119903
1198891205912+119888
119898119879
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (19)
Now choose the value of 119879 in order to satisfy the followingcondition
119888
119898119879= 119900 (1) (20)
An appropriate choice for 119879 can be 119879 = 119888119898So
1
1198792≪ 1 yields 119898
2
1198882≪ 1 997904rArr 119898
2≪ 1198882 (21)
This can be interpreted as expressing that the dampingcoefficient in (12) which is the viscosity of the fluid isvery strong or the mass is very small It exactly has thesame meaning with the small Reynolds number which wasmentioned above
In a precise sense define 120576 such that
120576 =1198982
1198882 (22)
Thus (19) becomes
1205761198892119903
1198891205912= minus
119889119903
119889120591+119886
119898119903minus1205741 minus119887
119898119903minus1205742 (23)
The character 120576 is too small so one can eliminate the righthand side as follows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 = 119891 (119903) (24)
The main question that naturally arises is that how muchprecise (24) can be and in what circumstances one can useit as a description of the system To answer this question weanalyzed the behavior of (23) in the phase space By defininga new parameter 119877 (23) will be
119889119903
119889120591= 119877
120576119889119877
119889120591= minus119877 +
119886
119898119903minus1205741 minus119887
119898119903minus1205742
(25)
By defining 119891(119903) = (119886119898) 119903minus1205741 minus (119887119898) 119903minus1205742 turns into
119889119903
119889120591= 119877
119889119877
119889120591=1
120576(119891 (119903) minus 119877)
(26)
By considering that the phase plane portraits this system andcurve 119862 119891(119903) minus 119877 = 0 in this planeThis curve demonstratesthe first-order system because the second equation in (26)equals to zero We claim that the actual second-order systemwill converge to this curve as time progress For provingconsider the actual curve starts from an119874(1) distance bellow
Modelling and Simulation in Engineering 5
the curve 119862 According to the second equation in (26) onehas 119889119877119889120591 = 119874(1120576) Therefore the curve suddenly jumpsinto 119891(119903) minus 119877 = 119874(120576) and as 120576 rarr 0 this region will beindistinguishable with 119862
From the above discussion one can conclude that thesystem in (26) can behave like a first order system but aftera time lag 119879 Before this time lag we are not allowed toeliminate the second-order derivative In other words thefirst order system behaves with a desired precision at 119905 gt 119879This is exactly what one expects from the system Since thedesired property of this system is its convergence radius astime approaching to infinity
Thus according to above analysis on (26) in the phasespace we can claim that (23) can be reduced into (24) asfollows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (27)
and in general form for many agents we have
119903119894=
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205741
minus119887
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205742
)
(28)
The convergence radius can be easily determined from (28)For example for the repulsion and attraction functions whichwere introduced in (5) and (8) respectively for the firstorder (28) Gazi and Passino [2] determined the maximumconvergence radius is not greater than 119887119886 This bound is forthe swarm set whose agents have no diameter In additionthis bound is independent to the number of the agents Toinclude the volume of each agent and the number of theagents participating in the cohesion task one need to modifythis bound To yield this consider119873 swarmmembers whichare accumulating in 3-dimensional spaces If all the agentsstick together to form a cluster the swarm volume size willbe
The swarm volume size = 431205871198623119873 (29)
If all these agents converge to a sphere the minimum radiusof such a sphere can be determined easily by equaling theaccumulated swarm volume and the volume of the sphere asfollows
4
31205871198623119873 lt
4
3120587119903min3997904rArr 119903min gt 119862
3radic119873 (30)
So the previous bound modifies to
The accurate size = 1198871198861198623radic119873 (31)
4 A Design Problem Finding the Number ofParticipating Nanorobot Probes
Consider a group of nanorobots in a blood vessel coop-erating for a special purpose that can be finding in somecancerous cells According to experimental notes 1012 robots
are injected through the veins [20] A typical adult has 5lit bloods Therefore the density of nano robots becomes2 times 10
minus4 nanorobots120583m3The maximum convergence radius for a swarm system
with these attraction and repulsion functions in (5) and (8)for maintaining the density constant according to (31) is
120576 lt119887
1198861198623radic119873 (32)
Therefore the density of nanorobots is
density = 119873
(43) 1205871205763=
119873
(43) 120587(1198623radic119873119887119886)
3=31198863
412058711988731198623
(33)
Equaling this formula with the experimental measured den-sity [20] of cooperative nanorobots in blood vessels gives
31198863
412058711988731198623= 2 times 10
minus4 Robot120583m3 (34)
Considering 1120583m diameter for each agent follows
(119886
119887)
3
= 2 times 10minus4times 4120587 times
1198623
3= 838 times 10
minus4 (35)
Then the ratio of attraction and repulsion coefficients is119886
119887= 0094 asymp 01 (36)
One of the important aspects of maximum convergenceradius in (31) is to determine the number of nanorobot agentswhich can accumulate in a vessel with respect to the diameterof the vessel For instance suppose that the diameter ofnanorobot cohesion cannot exceed a quarter of the diameterof the vein Hence one can easily calculate the maximumnumber of robots participate in cohesion Now assume thediameter of the vein is119863 = 800 120583m then
120576max =1198623radic119873119887
119886997904rArr 119889max =
21198623radic119873119887
119886=119863
4 (37)
As we derived a reasonable ratio of attraction and repulsionconstants for nano robots in blood it yields
119886
119887= 01 997904rArr
119887
119886= 10 119863 = 800 120583m 119862 = 1 120583m
119889max =21198623radic119873119887
119886= 20119862
3radic119873 =
119863
4= 200 120583m 997904rArr 119862 3radic119873
= 10 997904rArr 119873 = 1000Robots(38)
Itmeans that if the robot cohesion is forced to have a diameterless than a quarter of a vein diameter the maximum numbersof agents that can participate in the cohesion are 1000nanorobots
This example could be converted into a design problem ofmicro channels if it asks the diameter of the vessel by givingthe number of participating nanorobots
6 Modelling and Simulation in Engineering
5 Conclusion
In this study we discussed about the behavior dynamicsof nanoscale grains and particles moving in a host liquidAccording to this model the dynamics of each particledepend on the resultant forces between it and other particlesin its neighborhood that are in the form of attraction andrepulsion components One of the most important results ofthis model was to derive a convergence radius for particulateclustering in nanofluids that is one of the most importantphenomena in the field of the researches in micro- andnanofluids especially in the context of heat transfer
Acknowledgments
The authors would like to thankMilad Rakhsha fromAmirk-abir University of Technology Iran for bringing some usefulreferences in the field of nanofluidics Also thanks are toprofessorMichael Zavlanos fromDuke University NC USAfor his helpful comments
References
[1] C M Breder ldquoEquations descriptive of fish schools and otheranimal aggregationsrdquo Ecology vol 35 pp 361ndash370 1954
[2] V Gazi and K M Passino Swarm Stability and OptimizationSpringer New York NY USA 2011
[3] V Gazi and K M Passino ldquoA class of attractionsrepulsionfunctions for stable swarm aggregationsrdquo International Journalof Control vol 77 no 18 pp 1567ndash1579 2004
[4] W L Hase ldquoMolecular dynamics of clusters surfaces liquids ampinterfacesrdquo in Advances in Classical Trajectory Methods vol 4JAI press 1999
[5] J Li and J A M Kuipers ldquoGas-particle interactions in densegas-fluidized bedsrdquo Chemical Engineering Science vol 58 no3-6 pp 711ndash718 2003
[6] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics B vol 26 no 1 pp 29ndash41 1996
[7] R J Sadus Molecular Simulation of Fluids Theory Algorithmsand Object-Orientation) Elsevier New York NY USA 1999
[8] T I Zohdi ldquoParticle collision and adhesion under the influenceof near-fieldsrdquo Journal of Mechanics of Materials and Structuresvol 2 no 6 pp 1011ndash1018 2007
[9] K B Anoop T Sundararajan and S K Das ldquoEffect ofparticle size on the convective heat transfer in nanofluid inthe developing regionrdquo International Journal of Heat and MassTransfer vol 52 no 9-10 pp 2189ndash2195 2009
[10] HChang andYCChang ldquoFabrication ofAl2O3nanofluid by a
plasma arc nano particles synthesis systemrdquo Journal ofMaterialsProcessing Technology vol 207 no 1ndash3 pp 193ndash199 2008
[11] H Chen Y Ding and A Lapkin ldquoRheological behaviour ofnanofluids containing tube rod-like nanoparticlesrdquo PowderTechnology vol 194 no 1-2 pp 132ndash141 2009
[12] W Lu and Q Fan ldquoStudy for the particlersquos scale effect on somethermo physical properties of nano fluids by a simplifiedmolec-ular dynamics methodrdquo Engineering Analysis with BoundaryElements vol 32 no 4 pp 282ndash289 2008
[13] P K Namburu D K Das K M Tanguturi and R SVajjha ldquoNumerical study of turbulent flow and heat transfer
characteristics of nanofluids considering variable propertiesrdquoInternational Journal ofThermal Sciences vol 48 no 2 pp 290ndash302 2009
[14] S E B Maıga S J Palm C T Nguyen G Roy and NGalanis ldquoHeat transfer enhancement by using nanofluids inforced convection flowsrdquo International Journal ofHeat and FluidFlow vol 26 no 4 pp 530ndash546 2005
[15] MChandrasekar S Suresh andAChandra Bose ldquoExperimen-tal investigations and theoretical determination of thermal con-ductivity and viscosity of Al
2O3water nanofluidrdquo Experimental
Thermal and Fluid Science vol 34 no 2 pp 210ndash216 2010[16] M Chopkar S Kumar D R Bhandari P K Das and I
Manna ldquoDevelopment and characterization of Al2Cu and
Ag2Al nanoparticle dispersed water and ethylene glycol based
nanofluidrdquoMaterials Science and Engineering B vol 139 no 2-3 pp 141ndash148 2007
[17] B Ghasemi and S M Aminossadati ldquoBrownian motion ofnanoparticles in a triangular enclosure with natural convec-tionrdquo International Journal of Thermal Sciences vol 49 no 6pp 931ndash940 2010
[18] W Jiang G Ding H Peng and H Hu ldquoModeling of nanopar-ticlesrsquo aggregation and sedimentation in nanofluidrdquo CurrentApplied Physics vol 10 no 3 pp 934ndash941 2010
[19] N R Karthikeyan J Philip and B Raj ldquoEffect of clustering onthe thermal conductivity of nano fluidsrdquo Materials Chemistryand Physics vol 109 no 1 pp 50ndash55 2008
[20] A Cavalcanti T Hogg B Shirinzadeh and H C LiawldquoNanorobot communication techniques a comprehensive tuto-rialrdquo in Proceedings of the 9th International Conference on Con-trol Automation Robotics and Vision (ICARCV rsquo06) SingaporeDecember 2006
[21] R A Freitas Jr Basic Capabilities vol 1 of NanomedicineLandes Bioscience Georgetown Tex USA 1999
[22] R A Freitas Jr Biocompatibility vol 2A of NanomedicineLandes Bioscience Georgetown Tex USA 2003
[23] S H StrogatzNonlinear Dynamic and ChaosWith Applicationsto Physics Biology Chemistry and Engineering Addison-WesleyReading Mass USA 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Modelling and Simulation in Engineering 3
The infinity in above equation is a mathematical infinityIn other words the physical infinity can be determinedaccording to the application For example it can be assumed100 times longer than the particlersquos diameter By defining 119897 =100119889 in which 119889 is the agentrsquos diameter so
lim119903119894minus119903119895rarr 119897
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) = 0 (7)
For obtaining this in mind the basic model that indicateseach agent should interact with all other agents It will bemodified into the case each agent interacts with some agentsin its neighborhood which is according to the sensitivity ofthe agent for receiving the long-range attraction signals
Therefore the attraction function can be defined as
119891119886(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817) =
119886
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
(8)
and the value of 1205741in (2) will be equal to 1
It is worth to mention that this attraction function iscalled relative attraction function for long-range relative tothe repulsion function According to (8) it not only has directratio with distance but also has an inverse ratio with itNevertheless this inverse ratio is in the first power Thusit can be concluded this attraction function is long rangerelative to the repulsion that has an inverse ratio with thesecond power of distance
22 Adding Environmental Effects In common swarm mod-els the environmental effects are considered as well Theseeffects are modeled as a profile that can attract or repelmembers In fact this profile is considered as a simulationof nutrient that attracts member to itself or as a modelof toxin which repels members far apart However it canbe interpreted in a more general case as a potential fieldexerting on eachmember from the environmentThemotionof individuals will be through the opposite direction of theprofilersquos gradient
In order to add this effect into our model we considereda potential function like 119892(sdot) 119877119899 rarr 119877 and rewrite (1) asfollows
119903119894= minusnabla119903119894
119892 (119903119894) +
119873
sum
119895=1119895 = 119894
119891 (119903119894minus 119903119895) (9)
The ambient profile function can be interpreted in manykinds In this paper we use the plane profile as
119892 (119903) = 119860119879119903 + 119887 (10)
Then the equation of motion regarding the environmentaleffect will be
119903119894+1
119898119894
119903119894
=1
119898119894
(
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus119887
(10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817minus 119862)2))
minus nabla119903119894
119892 (119903119894)
(11)
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Particle 1Particle 2Particle 3
Figure 1 Two-dimensional simulation of (11) for three particles119898119894= 2 119886 = 100 119887 = 10 and nabla
119903119894119892(119903119894) = 2
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Particle 1Particle 2Particle 3
Figure 2 Two-dimensional simulation of (11) for three particles119898119894= 2 119886 = 10 119887 = 100 and nabla
119903119894119892(119903119894) = 2
Two simulation examples are provided in Figures 1 and 2Consider the effect of the attraction and the repulsioncoefficients in the convergence radius of the particles In bothcases the plane profile with nabla119892(119903) = 2 is assumed
3 Dimensional Analysis
In order to analyze (1) and apply it for our special case it isnecessary to make a physical sense about each term in thatequation For simplicity and without losing the generality
4 Modelling and Simulation in Engineering
assume the swarm system consists of just two membersTherefore the sigma sign in (1) disappears and we have
119898 119903 + 119889 119903 = 119886119903minus1205741 minus 119887119903
minus1205742 (12)
Equation (12) is a nonlinear ordinary differential equationConstants 120574
1and 120574
2can be determined according to our
desire in choosing any kind of attraction and repulsioncomponents
It is time to apply physical properties of the system ofnanoparticles in the nano fluid which can be considered asnanorobot probes in the blood The viscosity of blood is tentimes higher than water and we can claim that the effect ofmass of each robot is negligible To prove this claim refer toexperimental and more realistic approaches Cavalcanti et al[20] investigated in an experiment 1012 nanorobots with thetotal mass of just 02 gram in 5 lit bloods of a typical adult[21 22]
Since the ratio of inertia force to the viscous force is adimensionless number called the Reynolds number which is
Reynolds =119889120588120592
120583 (13)
Here 119889 120588 120584 and 120583 are the diameter of the particle thedensity of the fluid the average velocity of the flow and thedynamic viscosity of the flow respectively
The velocity of the flow in a small blood vessel is assumedabout 1mmsThe value for the density and viscosity of bloodplasma is
120588 = 1 grcm3 120583 = 10minus2 grcm sdot s (14)
According to the above values the Reynolds number for ananorobot with the diameter of 1 120583m is
Reynolds =119889120588120592
120583asymp 10minus3 (15)
For the case of water-Al2O3 nanofluids the Reynoldrsquos number
value is about 10minus4 This Reynolds number indicates that theviscosity of the host liquid is at least 119874(103) higher than themass of the particles
Consider a dimensionless time 120591 as proposed in [23]
120591 =119905
119879 (16)
A new derivative with respect to 120591 follows
119903 =119889119903
119889119905=119889119903
119889120591
119889120591
119889119905=1
119879
119889119903
119889120591
119903 =1198892119903
1198891199052=119889
119889119905(1
119879
119889119903
119889120591) =
1
1198792
1198892119903
1198891205912
(17)
Substituting above relations into (12) gives
119898
1198792
1198892119903
1198891205912+119888
119879
119889119903
119889120591= 119886119903minus1205741 minus 119887119903
minus1205742 (18)
Dividing both sides by119898 yields
1
1198792
1198892119903
1198891205912+119888
119898119879
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (19)
Now choose the value of 119879 in order to satisfy the followingcondition
119888
119898119879= 119900 (1) (20)
An appropriate choice for 119879 can be 119879 = 119888119898So
1
1198792≪ 1 yields 119898
2
1198882≪ 1 997904rArr 119898
2≪ 1198882 (21)
This can be interpreted as expressing that the dampingcoefficient in (12) which is the viscosity of the fluid isvery strong or the mass is very small It exactly has thesame meaning with the small Reynolds number which wasmentioned above
In a precise sense define 120576 such that
120576 =1198982
1198882 (22)
Thus (19) becomes
1205761198892119903
1198891205912= minus
119889119903
119889120591+119886
119898119903minus1205741 minus119887
119898119903minus1205742 (23)
The character 120576 is too small so one can eliminate the righthand side as follows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 = 119891 (119903) (24)
The main question that naturally arises is that how muchprecise (24) can be and in what circumstances one can useit as a description of the system To answer this question weanalyzed the behavior of (23) in the phase space By defininga new parameter 119877 (23) will be
119889119903
119889120591= 119877
120576119889119877
119889120591= minus119877 +
119886
119898119903minus1205741 minus119887
119898119903minus1205742
(25)
By defining 119891(119903) = (119886119898) 119903minus1205741 minus (119887119898) 119903minus1205742 turns into
119889119903
119889120591= 119877
119889119877
119889120591=1
120576(119891 (119903) minus 119877)
(26)
By considering that the phase plane portraits this system andcurve 119862 119891(119903) minus 119877 = 0 in this planeThis curve demonstratesthe first-order system because the second equation in (26)equals to zero We claim that the actual second-order systemwill converge to this curve as time progress For provingconsider the actual curve starts from an119874(1) distance bellow
Modelling and Simulation in Engineering 5
the curve 119862 According to the second equation in (26) onehas 119889119877119889120591 = 119874(1120576) Therefore the curve suddenly jumpsinto 119891(119903) minus 119877 = 119874(120576) and as 120576 rarr 0 this region will beindistinguishable with 119862
From the above discussion one can conclude that thesystem in (26) can behave like a first order system but aftera time lag 119879 Before this time lag we are not allowed toeliminate the second-order derivative In other words thefirst order system behaves with a desired precision at 119905 gt 119879This is exactly what one expects from the system Since thedesired property of this system is its convergence radius astime approaching to infinity
Thus according to above analysis on (26) in the phasespace we can claim that (23) can be reduced into (24) asfollows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (27)
and in general form for many agents we have
119903119894=
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205741
minus119887
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205742
)
(28)
The convergence radius can be easily determined from (28)For example for the repulsion and attraction functions whichwere introduced in (5) and (8) respectively for the firstorder (28) Gazi and Passino [2] determined the maximumconvergence radius is not greater than 119887119886 This bound is forthe swarm set whose agents have no diameter In additionthis bound is independent to the number of the agents Toinclude the volume of each agent and the number of theagents participating in the cohesion task one need to modifythis bound To yield this consider119873 swarmmembers whichare accumulating in 3-dimensional spaces If all the agentsstick together to form a cluster the swarm volume size willbe
The swarm volume size = 431205871198623119873 (29)
If all these agents converge to a sphere the minimum radiusof such a sphere can be determined easily by equaling theaccumulated swarm volume and the volume of the sphere asfollows
4
31205871198623119873 lt
4
3120587119903min3997904rArr 119903min gt 119862
3radic119873 (30)
So the previous bound modifies to
The accurate size = 1198871198861198623radic119873 (31)
4 A Design Problem Finding the Number ofParticipating Nanorobot Probes
Consider a group of nanorobots in a blood vessel coop-erating for a special purpose that can be finding in somecancerous cells According to experimental notes 1012 robots
are injected through the veins [20] A typical adult has 5lit bloods Therefore the density of nano robots becomes2 times 10
minus4 nanorobots120583m3The maximum convergence radius for a swarm system
with these attraction and repulsion functions in (5) and (8)for maintaining the density constant according to (31) is
120576 lt119887
1198861198623radic119873 (32)
Therefore the density of nanorobots is
density = 119873
(43) 1205871205763=
119873
(43) 120587(1198623radic119873119887119886)
3=31198863
412058711988731198623
(33)
Equaling this formula with the experimental measured den-sity [20] of cooperative nanorobots in blood vessels gives
31198863
412058711988731198623= 2 times 10
minus4 Robot120583m3 (34)
Considering 1120583m diameter for each agent follows
(119886
119887)
3
= 2 times 10minus4times 4120587 times
1198623
3= 838 times 10
minus4 (35)
Then the ratio of attraction and repulsion coefficients is119886
119887= 0094 asymp 01 (36)
One of the important aspects of maximum convergenceradius in (31) is to determine the number of nanorobot agentswhich can accumulate in a vessel with respect to the diameterof the vessel For instance suppose that the diameter ofnanorobot cohesion cannot exceed a quarter of the diameterof the vein Hence one can easily calculate the maximumnumber of robots participate in cohesion Now assume thediameter of the vein is119863 = 800 120583m then
120576max =1198623radic119873119887
119886997904rArr 119889max =
21198623radic119873119887
119886=119863
4 (37)
As we derived a reasonable ratio of attraction and repulsionconstants for nano robots in blood it yields
119886
119887= 01 997904rArr
119887
119886= 10 119863 = 800 120583m 119862 = 1 120583m
119889max =21198623radic119873119887
119886= 20119862
3radic119873 =
119863
4= 200 120583m 997904rArr 119862 3radic119873
= 10 997904rArr 119873 = 1000Robots(38)
Itmeans that if the robot cohesion is forced to have a diameterless than a quarter of a vein diameter the maximum numbersof agents that can participate in the cohesion are 1000nanorobots
This example could be converted into a design problem ofmicro channels if it asks the diameter of the vessel by givingthe number of participating nanorobots
6 Modelling and Simulation in Engineering
5 Conclusion
In this study we discussed about the behavior dynamicsof nanoscale grains and particles moving in a host liquidAccording to this model the dynamics of each particledepend on the resultant forces between it and other particlesin its neighborhood that are in the form of attraction andrepulsion components One of the most important results ofthis model was to derive a convergence radius for particulateclustering in nanofluids that is one of the most importantphenomena in the field of the researches in micro- andnanofluids especially in the context of heat transfer
Acknowledgments
The authors would like to thankMilad Rakhsha fromAmirk-abir University of Technology Iran for bringing some usefulreferences in the field of nanofluidics Also thanks are toprofessorMichael Zavlanos fromDuke University NC USAfor his helpful comments
References
[1] C M Breder ldquoEquations descriptive of fish schools and otheranimal aggregationsrdquo Ecology vol 35 pp 361ndash370 1954
[2] V Gazi and K M Passino Swarm Stability and OptimizationSpringer New York NY USA 2011
[3] V Gazi and K M Passino ldquoA class of attractionsrepulsionfunctions for stable swarm aggregationsrdquo International Journalof Control vol 77 no 18 pp 1567ndash1579 2004
[4] W L Hase ldquoMolecular dynamics of clusters surfaces liquids ampinterfacesrdquo in Advances in Classical Trajectory Methods vol 4JAI press 1999
[5] J Li and J A M Kuipers ldquoGas-particle interactions in densegas-fluidized bedsrdquo Chemical Engineering Science vol 58 no3-6 pp 711ndash718 2003
[6] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics B vol 26 no 1 pp 29ndash41 1996
[7] R J Sadus Molecular Simulation of Fluids Theory Algorithmsand Object-Orientation) Elsevier New York NY USA 1999
[8] T I Zohdi ldquoParticle collision and adhesion under the influenceof near-fieldsrdquo Journal of Mechanics of Materials and Structuresvol 2 no 6 pp 1011ndash1018 2007
[9] K B Anoop T Sundararajan and S K Das ldquoEffect ofparticle size on the convective heat transfer in nanofluid inthe developing regionrdquo International Journal of Heat and MassTransfer vol 52 no 9-10 pp 2189ndash2195 2009
[10] HChang andYCChang ldquoFabrication ofAl2O3nanofluid by a
plasma arc nano particles synthesis systemrdquo Journal ofMaterialsProcessing Technology vol 207 no 1ndash3 pp 193ndash199 2008
[11] H Chen Y Ding and A Lapkin ldquoRheological behaviour ofnanofluids containing tube rod-like nanoparticlesrdquo PowderTechnology vol 194 no 1-2 pp 132ndash141 2009
[12] W Lu and Q Fan ldquoStudy for the particlersquos scale effect on somethermo physical properties of nano fluids by a simplifiedmolec-ular dynamics methodrdquo Engineering Analysis with BoundaryElements vol 32 no 4 pp 282ndash289 2008
[13] P K Namburu D K Das K M Tanguturi and R SVajjha ldquoNumerical study of turbulent flow and heat transfer
characteristics of nanofluids considering variable propertiesrdquoInternational Journal ofThermal Sciences vol 48 no 2 pp 290ndash302 2009
[14] S E B Maıga S J Palm C T Nguyen G Roy and NGalanis ldquoHeat transfer enhancement by using nanofluids inforced convection flowsrdquo International Journal ofHeat and FluidFlow vol 26 no 4 pp 530ndash546 2005
[15] MChandrasekar S Suresh andAChandra Bose ldquoExperimen-tal investigations and theoretical determination of thermal con-ductivity and viscosity of Al
2O3water nanofluidrdquo Experimental
Thermal and Fluid Science vol 34 no 2 pp 210ndash216 2010[16] M Chopkar S Kumar D R Bhandari P K Das and I
Manna ldquoDevelopment and characterization of Al2Cu and
Ag2Al nanoparticle dispersed water and ethylene glycol based
nanofluidrdquoMaterials Science and Engineering B vol 139 no 2-3 pp 141ndash148 2007
[17] B Ghasemi and S M Aminossadati ldquoBrownian motion ofnanoparticles in a triangular enclosure with natural convec-tionrdquo International Journal of Thermal Sciences vol 49 no 6pp 931ndash940 2010
[18] W Jiang G Ding H Peng and H Hu ldquoModeling of nanopar-ticlesrsquo aggregation and sedimentation in nanofluidrdquo CurrentApplied Physics vol 10 no 3 pp 934ndash941 2010
[19] N R Karthikeyan J Philip and B Raj ldquoEffect of clustering onthe thermal conductivity of nano fluidsrdquo Materials Chemistryand Physics vol 109 no 1 pp 50ndash55 2008
[20] A Cavalcanti T Hogg B Shirinzadeh and H C LiawldquoNanorobot communication techniques a comprehensive tuto-rialrdquo in Proceedings of the 9th International Conference on Con-trol Automation Robotics and Vision (ICARCV rsquo06) SingaporeDecember 2006
[21] R A Freitas Jr Basic Capabilities vol 1 of NanomedicineLandes Bioscience Georgetown Tex USA 1999
[22] R A Freitas Jr Biocompatibility vol 2A of NanomedicineLandes Bioscience Georgetown Tex USA 2003
[23] S H StrogatzNonlinear Dynamic and ChaosWith Applicationsto Physics Biology Chemistry and Engineering Addison-WesleyReading Mass USA 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Modelling and Simulation in Engineering
assume the swarm system consists of just two membersTherefore the sigma sign in (1) disappears and we have
119898 119903 + 119889 119903 = 119886119903minus1205741 minus 119887119903
minus1205742 (12)
Equation (12) is a nonlinear ordinary differential equationConstants 120574
1and 120574
2can be determined according to our
desire in choosing any kind of attraction and repulsioncomponents
It is time to apply physical properties of the system ofnanoparticles in the nano fluid which can be considered asnanorobot probes in the blood The viscosity of blood is tentimes higher than water and we can claim that the effect ofmass of each robot is negligible To prove this claim refer toexperimental and more realistic approaches Cavalcanti et al[20] investigated in an experiment 1012 nanorobots with thetotal mass of just 02 gram in 5 lit bloods of a typical adult[21 22]
Since the ratio of inertia force to the viscous force is adimensionless number called the Reynolds number which is
Reynolds =119889120588120592
120583 (13)
Here 119889 120588 120584 and 120583 are the diameter of the particle thedensity of the fluid the average velocity of the flow and thedynamic viscosity of the flow respectively
The velocity of the flow in a small blood vessel is assumedabout 1mmsThe value for the density and viscosity of bloodplasma is
120588 = 1 grcm3 120583 = 10minus2 grcm sdot s (14)
According to the above values the Reynolds number for ananorobot with the diameter of 1 120583m is
Reynolds =119889120588120592
120583asymp 10minus3 (15)
For the case of water-Al2O3 nanofluids the Reynoldrsquos number
value is about 10minus4 This Reynolds number indicates that theviscosity of the host liquid is at least 119874(103) higher than themass of the particles
Consider a dimensionless time 120591 as proposed in [23]
120591 =119905
119879 (16)
A new derivative with respect to 120591 follows
119903 =119889119903
119889119905=119889119903
119889120591
119889120591
119889119905=1
119879
119889119903
119889120591
119903 =1198892119903
1198891199052=119889
119889119905(1
119879
119889119903
119889120591) =
1
1198792
1198892119903
1198891205912
(17)
Substituting above relations into (12) gives
119898
1198792
1198892119903
1198891205912+119888
119879
119889119903
119889120591= 119886119903minus1205741 minus 119887119903
minus1205742 (18)
Dividing both sides by119898 yields
1
1198792
1198892119903
1198891205912+119888
119898119879
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (19)
Now choose the value of 119879 in order to satisfy the followingcondition
119888
119898119879= 119900 (1) (20)
An appropriate choice for 119879 can be 119879 = 119888119898So
1
1198792≪ 1 yields 119898
2
1198882≪ 1 997904rArr 119898
2≪ 1198882 (21)
This can be interpreted as expressing that the dampingcoefficient in (12) which is the viscosity of the fluid isvery strong or the mass is very small It exactly has thesame meaning with the small Reynolds number which wasmentioned above
In a precise sense define 120576 such that
120576 =1198982
1198882 (22)
Thus (19) becomes
1205761198892119903
1198891205912= minus
119889119903
119889120591+119886
119898119903minus1205741 minus119887
119898119903minus1205742 (23)
The character 120576 is too small so one can eliminate the righthand side as follows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 = 119891 (119903) (24)
The main question that naturally arises is that how muchprecise (24) can be and in what circumstances one can useit as a description of the system To answer this question weanalyzed the behavior of (23) in the phase space By defininga new parameter 119877 (23) will be
119889119903
119889120591= 119877
120576119889119877
119889120591= minus119877 +
119886
119898119903minus1205741 minus119887
119898119903minus1205742
(25)
By defining 119891(119903) = (119886119898) 119903minus1205741 minus (119887119898) 119903minus1205742 turns into
119889119903
119889120591= 119877
119889119877
119889120591=1
120576(119891 (119903) minus 119877)
(26)
By considering that the phase plane portraits this system andcurve 119862 119891(119903) minus 119877 = 0 in this planeThis curve demonstratesthe first-order system because the second equation in (26)equals to zero We claim that the actual second-order systemwill converge to this curve as time progress For provingconsider the actual curve starts from an119874(1) distance bellow
Modelling and Simulation in Engineering 5
the curve 119862 According to the second equation in (26) onehas 119889119877119889120591 = 119874(1120576) Therefore the curve suddenly jumpsinto 119891(119903) minus 119877 = 119874(120576) and as 120576 rarr 0 this region will beindistinguishable with 119862
From the above discussion one can conclude that thesystem in (26) can behave like a first order system but aftera time lag 119879 Before this time lag we are not allowed toeliminate the second-order derivative In other words thefirst order system behaves with a desired precision at 119905 gt 119879This is exactly what one expects from the system Since thedesired property of this system is its convergence radius astime approaching to infinity
Thus according to above analysis on (26) in the phasespace we can claim that (23) can be reduced into (24) asfollows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (27)
and in general form for many agents we have
119903119894=
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205741
minus119887
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205742
)
(28)
The convergence radius can be easily determined from (28)For example for the repulsion and attraction functions whichwere introduced in (5) and (8) respectively for the firstorder (28) Gazi and Passino [2] determined the maximumconvergence radius is not greater than 119887119886 This bound is forthe swarm set whose agents have no diameter In additionthis bound is independent to the number of the agents Toinclude the volume of each agent and the number of theagents participating in the cohesion task one need to modifythis bound To yield this consider119873 swarmmembers whichare accumulating in 3-dimensional spaces If all the agentsstick together to form a cluster the swarm volume size willbe
The swarm volume size = 431205871198623119873 (29)
If all these agents converge to a sphere the minimum radiusof such a sphere can be determined easily by equaling theaccumulated swarm volume and the volume of the sphere asfollows
4
31205871198623119873 lt
4
3120587119903min3997904rArr 119903min gt 119862
3radic119873 (30)
So the previous bound modifies to
The accurate size = 1198871198861198623radic119873 (31)
4 A Design Problem Finding the Number ofParticipating Nanorobot Probes
Consider a group of nanorobots in a blood vessel coop-erating for a special purpose that can be finding in somecancerous cells According to experimental notes 1012 robots
are injected through the veins [20] A typical adult has 5lit bloods Therefore the density of nano robots becomes2 times 10
minus4 nanorobots120583m3The maximum convergence radius for a swarm system
with these attraction and repulsion functions in (5) and (8)for maintaining the density constant according to (31) is
120576 lt119887
1198861198623radic119873 (32)
Therefore the density of nanorobots is
density = 119873
(43) 1205871205763=
119873
(43) 120587(1198623radic119873119887119886)
3=31198863
412058711988731198623
(33)
Equaling this formula with the experimental measured den-sity [20] of cooperative nanorobots in blood vessels gives
31198863
412058711988731198623= 2 times 10
minus4 Robot120583m3 (34)
Considering 1120583m diameter for each agent follows
(119886
119887)
3
= 2 times 10minus4times 4120587 times
1198623
3= 838 times 10
minus4 (35)
Then the ratio of attraction and repulsion coefficients is119886
119887= 0094 asymp 01 (36)
One of the important aspects of maximum convergenceradius in (31) is to determine the number of nanorobot agentswhich can accumulate in a vessel with respect to the diameterof the vessel For instance suppose that the diameter ofnanorobot cohesion cannot exceed a quarter of the diameterof the vein Hence one can easily calculate the maximumnumber of robots participate in cohesion Now assume thediameter of the vein is119863 = 800 120583m then
120576max =1198623radic119873119887
119886997904rArr 119889max =
21198623radic119873119887
119886=119863
4 (37)
As we derived a reasonable ratio of attraction and repulsionconstants for nano robots in blood it yields
119886
119887= 01 997904rArr
119887
119886= 10 119863 = 800 120583m 119862 = 1 120583m
119889max =21198623radic119873119887
119886= 20119862
3radic119873 =
119863
4= 200 120583m 997904rArr 119862 3radic119873
= 10 997904rArr 119873 = 1000Robots(38)
Itmeans that if the robot cohesion is forced to have a diameterless than a quarter of a vein diameter the maximum numbersof agents that can participate in the cohesion are 1000nanorobots
This example could be converted into a design problem ofmicro channels if it asks the diameter of the vessel by givingthe number of participating nanorobots
6 Modelling and Simulation in Engineering
5 Conclusion
In this study we discussed about the behavior dynamicsof nanoscale grains and particles moving in a host liquidAccording to this model the dynamics of each particledepend on the resultant forces between it and other particlesin its neighborhood that are in the form of attraction andrepulsion components One of the most important results ofthis model was to derive a convergence radius for particulateclustering in nanofluids that is one of the most importantphenomena in the field of the researches in micro- andnanofluids especially in the context of heat transfer
Acknowledgments
The authors would like to thankMilad Rakhsha fromAmirk-abir University of Technology Iran for bringing some usefulreferences in the field of nanofluidics Also thanks are toprofessorMichael Zavlanos fromDuke University NC USAfor his helpful comments
References
[1] C M Breder ldquoEquations descriptive of fish schools and otheranimal aggregationsrdquo Ecology vol 35 pp 361ndash370 1954
[2] V Gazi and K M Passino Swarm Stability and OptimizationSpringer New York NY USA 2011
[3] V Gazi and K M Passino ldquoA class of attractionsrepulsionfunctions for stable swarm aggregationsrdquo International Journalof Control vol 77 no 18 pp 1567ndash1579 2004
[4] W L Hase ldquoMolecular dynamics of clusters surfaces liquids ampinterfacesrdquo in Advances in Classical Trajectory Methods vol 4JAI press 1999
[5] J Li and J A M Kuipers ldquoGas-particle interactions in densegas-fluidized bedsrdquo Chemical Engineering Science vol 58 no3-6 pp 711ndash718 2003
[6] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics B vol 26 no 1 pp 29ndash41 1996
[7] R J Sadus Molecular Simulation of Fluids Theory Algorithmsand Object-Orientation) Elsevier New York NY USA 1999
[8] T I Zohdi ldquoParticle collision and adhesion under the influenceof near-fieldsrdquo Journal of Mechanics of Materials and Structuresvol 2 no 6 pp 1011ndash1018 2007
[9] K B Anoop T Sundararajan and S K Das ldquoEffect ofparticle size on the convective heat transfer in nanofluid inthe developing regionrdquo International Journal of Heat and MassTransfer vol 52 no 9-10 pp 2189ndash2195 2009
[10] HChang andYCChang ldquoFabrication ofAl2O3nanofluid by a
plasma arc nano particles synthesis systemrdquo Journal ofMaterialsProcessing Technology vol 207 no 1ndash3 pp 193ndash199 2008
[11] H Chen Y Ding and A Lapkin ldquoRheological behaviour ofnanofluids containing tube rod-like nanoparticlesrdquo PowderTechnology vol 194 no 1-2 pp 132ndash141 2009
[12] W Lu and Q Fan ldquoStudy for the particlersquos scale effect on somethermo physical properties of nano fluids by a simplifiedmolec-ular dynamics methodrdquo Engineering Analysis with BoundaryElements vol 32 no 4 pp 282ndash289 2008
[13] P K Namburu D K Das K M Tanguturi and R SVajjha ldquoNumerical study of turbulent flow and heat transfer
characteristics of nanofluids considering variable propertiesrdquoInternational Journal ofThermal Sciences vol 48 no 2 pp 290ndash302 2009
[14] S E B Maıga S J Palm C T Nguyen G Roy and NGalanis ldquoHeat transfer enhancement by using nanofluids inforced convection flowsrdquo International Journal ofHeat and FluidFlow vol 26 no 4 pp 530ndash546 2005
[15] MChandrasekar S Suresh andAChandra Bose ldquoExperimen-tal investigations and theoretical determination of thermal con-ductivity and viscosity of Al
2O3water nanofluidrdquo Experimental
Thermal and Fluid Science vol 34 no 2 pp 210ndash216 2010[16] M Chopkar S Kumar D R Bhandari P K Das and I
Manna ldquoDevelopment and characterization of Al2Cu and
Ag2Al nanoparticle dispersed water and ethylene glycol based
nanofluidrdquoMaterials Science and Engineering B vol 139 no 2-3 pp 141ndash148 2007
[17] B Ghasemi and S M Aminossadati ldquoBrownian motion ofnanoparticles in a triangular enclosure with natural convec-tionrdquo International Journal of Thermal Sciences vol 49 no 6pp 931ndash940 2010
[18] W Jiang G Ding H Peng and H Hu ldquoModeling of nanopar-ticlesrsquo aggregation and sedimentation in nanofluidrdquo CurrentApplied Physics vol 10 no 3 pp 934ndash941 2010
[19] N R Karthikeyan J Philip and B Raj ldquoEffect of clustering onthe thermal conductivity of nano fluidsrdquo Materials Chemistryand Physics vol 109 no 1 pp 50ndash55 2008
[20] A Cavalcanti T Hogg B Shirinzadeh and H C LiawldquoNanorobot communication techniques a comprehensive tuto-rialrdquo in Proceedings of the 9th International Conference on Con-trol Automation Robotics and Vision (ICARCV rsquo06) SingaporeDecember 2006
[21] R A Freitas Jr Basic Capabilities vol 1 of NanomedicineLandes Bioscience Georgetown Tex USA 1999
[22] R A Freitas Jr Biocompatibility vol 2A of NanomedicineLandes Bioscience Georgetown Tex USA 2003
[23] S H StrogatzNonlinear Dynamic and ChaosWith Applicationsto Physics Biology Chemistry and Engineering Addison-WesleyReading Mass USA 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Modelling and Simulation in Engineering 5
the curve 119862 According to the second equation in (26) onehas 119889119877119889120591 = 119874(1120576) Therefore the curve suddenly jumpsinto 119891(119903) minus 119877 = 119874(120576) and as 120576 rarr 0 this region will beindistinguishable with 119862
From the above discussion one can conclude that thesystem in (26) can behave like a first order system but aftera time lag 119879 Before this time lag we are not allowed toeliminate the second-order derivative In other words thefirst order system behaves with a desired precision at 119905 gt 119879This is exactly what one expects from the system Since thedesired property of this system is its convergence radius astime approaching to infinity
Thus according to above analysis on (26) in the phasespace we can claim that (23) can be reduced into (24) asfollows
119889119903
119889120591=119886
119898119903minus1205741 minus119887
119898119903minus1205742 (27)
and in general form for many agents we have
119903119894=
119873
sum
119895=1119895 = 119894
minus
(119903119894minus 119903119895)
10038161003816100381610038161003816119903119894minus 119903119895
10038161003816100381610038161003816
(119886
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205741
minus119887
119898
10038171003817100381710038171003817119903119894minus 119903119895
10038171003817100381710038171003817
minus1205742
)
(28)
The convergence radius can be easily determined from (28)For example for the repulsion and attraction functions whichwere introduced in (5) and (8) respectively for the firstorder (28) Gazi and Passino [2] determined the maximumconvergence radius is not greater than 119887119886 This bound is forthe swarm set whose agents have no diameter In additionthis bound is independent to the number of the agents Toinclude the volume of each agent and the number of theagents participating in the cohesion task one need to modifythis bound To yield this consider119873 swarmmembers whichare accumulating in 3-dimensional spaces If all the agentsstick together to form a cluster the swarm volume size willbe
The swarm volume size = 431205871198623119873 (29)
If all these agents converge to a sphere the minimum radiusof such a sphere can be determined easily by equaling theaccumulated swarm volume and the volume of the sphere asfollows
4
31205871198623119873 lt
4
3120587119903min3997904rArr 119903min gt 119862
3radic119873 (30)
So the previous bound modifies to
The accurate size = 1198871198861198623radic119873 (31)
4 A Design Problem Finding the Number ofParticipating Nanorobot Probes
Consider a group of nanorobots in a blood vessel coop-erating for a special purpose that can be finding in somecancerous cells According to experimental notes 1012 robots
are injected through the veins [20] A typical adult has 5lit bloods Therefore the density of nano robots becomes2 times 10
minus4 nanorobots120583m3The maximum convergence radius for a swarm system
with these attraction and repulsion functions in (5) and (8)for maintaining the density constant according to (31) is
120576 lt119887
1198861198623radic119873 (32)
Therefore the density of nanorobots is
density = 119873
(43) 1205871205763=
119873
(43) 120587(1198623radic119873119887119886)
3=31198863
412058711988731198623
(33)
Equaling this formula with the experimental measured den-sity [20] of cooperative nanorobots in blood vessels gives
31198863
412058711988731198623= 2 times 10
minus4 Robot120583m3 (34)
Considering 1120583m diameter for each agent follows
(119886
119887)
3
= 2 times 10minus4times 4120587 times
1198623
3= 838 times 10
minus4 (35)
Then the ratio of attraction and repulsion coefficients is119886
119887= 0094 asymp 01 (36)
One of the important aspects of maximum convergenceradius in (31) is to determine the number of nanorobot agentswhich can accumulate in a vessel with respect to the diameterof the vessel For instance suppose that the diameter ofnanorobot cohesion cannot exceed a quarter of the diameterof the vein Hence one can easily calculate the maximumnumber of robots participate in cohesion Now assume thediameter of the vein is119863 = 800 120583m then
120576max =1198623radic119873119887
119886997904rArr 119889max =
21198623radic119873119887
119886=119863
4 (37)
As we derived a reasonable ratio of attraction and repulsionconstants for nano robots in blood it yields
119886
119887= 01 997904rArr
119887
119886= 10 119863 = 800 120583m 119862 = 1 120583m
119889max =21198623radic119873119887
119886= 20119862
3radic119873 =
119863
4= 200 120583m 997904rArr 119862 3radic119873
= 10 997904rArr 119873 = 1000Robots(38)
Itmeans that if the robot cohesion is forced to have a diameterless than a quarter of a vein diameter the maximum numbersof agents that can participate in the cohesion are 1000nanorobots
This example could be converted into a design problem ofmicro channels if it asks the diameter of the vessel by givingthe number of participating nanorobots
6 Modelling and Simulation in Engineering
5 Conclusion
In this study we discussed about the behavior dynamicsof nanoscale grains and particles moving in a host liquidAccording to this model the dynamics of each particledepend on the resultant forces between it and other particlesin its neighborhood that are in the form of attraction andrepulsion components One of the most important results ofthis model was to derive a convergence radius for particulateclustering in nanofluids that is one of the most importantphenomena in the field of the researches in micro- andnanofluids especially in the context of heat transfer
Acknowledgments
The authors would like to thankMilad Rakhsha fromAmirk-abir University of Technology Iran for bringing some usefulreferences in the field of nanofluidics Also thanks are toprofessorMichael Zavlanos fromDuke University NC USAfor his helpful comments
References
[1] C M Breder ldquoEquations descriptive of fish schools and otheranimal aggregationsrdquo Ecology vol 35 pp 361ndash370 1954
[2] V Gazi and K M Passino Swarm Stability and OptimizationSpringer New York NY USA 2011
[3] V Gazi and K M Passino ldquoA class of attractionsrepulsionfunctions for stable swarm aggregationsrdquo International Journalof Control vol 77 no 18 pp 1567ndash1579 2004
[4] W L Hase ldquoMolecular dynamics of clusters surfaces liquids ampinterfacesrdquo in Advances in Classical Trajectory Methods vol 4JAI press 1999
[5] J Li and J A M Kuipers ldquoGas-particle interactions in densegas-fluidized bedsrdquo Chemical Engineering Science vol 58 no3-6 pp 711ndash718 2003
[6] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics B vol 26 no 1 pp 29ndash41 1996
[7] R J Sadus Molecular Simulation of Fluids Theory Algorithmsand Object-Orientation) Elsevier New York NY USA 1999
[8] T I Zohdi ldquoParticle collision and adhesion under the influenceof near-fieldsrdquo Journal of Mechanics of Materials and Structuresvol 2 no 6 pp 1011ndash1018 2007
[9] K B Anoop T Sundararajan and S K Das ldquoEffect ofparticle size on the convective heat transfer in nanofluid inthe developing regionrdquo International Journal of Heat and MassTransfer vol 52 no 9-10 pp 2189ndash2195 2009
[10] HChang andYCChang ldquoFabrication ofAl2O3nanofluid by a
plasma arc nano particles synthesis systemrdquo Journal ofMaterialsProcessing Technology vol 207 no 1ndash3 pp 193ndash199 2008
[11] H Chen Y Ding and A Lapkin ldquoRheological behaviour ofnanofluids containing tube rod-like nanoparticlesrdquo PowderTechnology vol 194 no 1-2 pp 132ndash141 2009
[12] W Lu and Q Fan ldquoStudy for the particlersquos scale effect on somethermo physical properties of nano fluids by a simplifiedmolec-ular dynamics methodrdquo Engineering Analysis with BoundaryElements vol 32 no 4 pp 282ndash289 2008
[13] P K Namburu D K Das K M Tanguturi and R SVajjha ldquoNumerical study of turbulent flow and heat transfer
characteristics of nanofluids considering variable propertiesrdquoInternational Journal ofThermal Sciences vol 48 no 2 pp 290ndash302 2009
[14] S E B Maıga S J Palm C T Nguyen G Roy and NGalanis ldquoHeat transfer enhancement by using nanofluids inforced convection flowsrdquo International Journal ofHeat and FluidFlow vol 26 no 4 pp 530ndash546 2005
[15] MChandrasekar S Suresh andAChandra Bose ldquoExperimen-tal investigations and theoretical determination of thermal con-ductivity and viscosity of Al
2O3water nanofluidrdquo Experimental
Thermal and Fluid Science vol 34 no 2 pp 210ndash216 2010[16] M Chopkar S Kumar D R Bhandari P K Das and I
Manna ldquoDevelopment and characterization of Al2Cu and
Ag2Al nanoparticle dispersed water and ethylene glycol based
nanofluidrdquoMaterials Science and Engineering B vol 139 no 2-3 pp 141ndash148 2007
[17] B Ghasemi and S M Aminossadati ldquoBrownian motion ofnanoparticles in a triangular enclosure with natural convec-tionrdquo International Journal of Thermal Sciences vol 49 no 6pp 931ndash940 2010
[18] W Jiang G Ding H Peng and H Hu ldquoModeling of nanopar-ticlesrsquo aggregation and sedimentation in nanofluidrdquo CurrentApplied Physics vol 10 no 3 pp 934ndash941 2010
[19] N R Karthikeyan J Philip and B Raj ldquoEffect of clustering onthe thermal conductivity of nano fluidsrdquo Materials Chemistryand Physics vol 109 no 1 pp 50ndash55 2008
[20] A Cavalcanti T Hogg B Shirinzadeh and H C LiawldquoNanorobot communication techniques a comprehensive tuto-rialrdquo in Proceedings of the 9th International Conference on Con-trol Automation Robotics and Vision (ICARCV rsquo06) SingaporeDecember 2006
[21] R A Freitas Jr Basic Capabilities vol 1 of NanomedicineLandes Bioscience Georgetown Tex USA 1999
[22] R A Freitas Jr Biocompatibility vol 2A of NanomedicineLandes Bioscience Georgetown Tex USA 2003
[23] S H StrogatzNonlinear Dynamic and ChaosWith Applicationsto Physics Biology Chemistry and Engineering Addison-WesleyReading Mass USA 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Modelling and Simulation in Engineering
5 Conclusion
In this study we discussed about the behavior dynamicsof nanoscale grains and particles moving in a host liquidAccording to this model the dynamics of each particledepend on the resultant forces between it and other particlesin its neighborhood that are in the form of attraction andrepulsion components One of the most important results ofthis model was to derive a convergence radius for particulateclustering in nanofluids that is one of the most importantphenomena in the field of the researches in micro- andnanofluids especially in the context of heat transfer
Acknowledgments
The authors would like to thankMilad Rakhsha fromAmirk-abir University of Technology Iran for bringing some usefulreferences in the field of nanofluidics Also thanks are toprofessorMichael Zavlanos fromDuke University NC USAfor his helpful comments
References
[1] C M Breder ldquoEquations descriptive of fish schools and otheranimal aggregationsrdquo Ecology vol 35 pp 361ndash370 1954
[2] V Gazi and K M Passino Swarm Stability and OptimizationSpringer New York NY USA 2011
[3] V Gazi and K M Passino ldquoA class of attractionsrepulsionfunctions for stable swarm aggregationsrdquo International Journalof Control vol 77 no 18 pp 1567ndash1579 2004
[4] W L Hase ldquoMolecular dynamics of clusters surfaces liquids ampinterfacesrdquo in Advances in Classical Trajectory Methods vol 4JAI press 1999
[5] J Li and J A M Kuipers ldquoGas-particle interactions in densegas-fluidized bedsrdquo Chemical Engineering Science vol 58 no3-6 pp 711ndash718 2003
[6] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics B vol 26 no 1 pp 29ndash41 1996
[7] R J Sadus Molecular Simulation of Fluids Theory Algorithmsand Object-Orientation) Elsevier New York NY USA 1999
[8] T I Zohdi ldquoParticle collision and adhesion under the influenceof near-fieldsrdquo Journal of Mechanics of Materials and Structuresvol 2 no 6 pp 1011ndash1018 2007
[9] K B Anoop T Sundararajan and S K Das ldquoEffect ofparticle size on the convective heat transfer in nanofluid inthe developing regionrdquo International Journal of Heat and MassTransfer vol 52 no 9-10 pp 2189ndash2195 2009
[10] HChang andYCChang ldquoFabrication ofAl2O3nanofluid by a
plasma arc nano particles synthesis systemrdquo Journal ofMaterialsProcessing Technology vol 207 no 1ndash3 pp 193ndash199 2008
[11] H Chen Y Ding and A Lapkin ldquoRheological behaviour ofnanofluids containing tube rod-like nanoparticlesrdquo PowderTechnology vol 194 no 1-2 pp 132ndash141 2009
[12] W Lu and Q Fan ldquoStudy for the particlersquos scale effect on somethermo physical properties of nano fluids by a simplifiedmolec-ular dynamics methodrdquo Engineering Analysis with BoundaryElements vol 32 no 4 pp 282ndash289 2008
[13] P K Namburu D K Das K M Tanguturi and R SVajjha ldquoNumerical study of turbulent flow and heat transfer
characteristics of nanofluids considering variable propertiesrdquoInternational Journal ofThermal Sciences vol 48 no 2 pp 290ndash302 2009
[14] S E B Maıga S J Palm C T Nguyen G Roy and NGalanis ldquoHeat transfer enhancement by using nanofluids inforced convection flowsrdquo International Journal ofHeat and FluidFlow vol 26 no 4 pp 530ndash546 2005
[15] MChandrasekar S Suresh andAChandra Bose ldquoExperimen-tal investigations and theoretical determination of thermal con-ductivity and viscosity of Al
2O3water nanofluidrdquo Experimental
Thermal and Fluid Science vol 34 no 2 pp 210ndash216 2010[16] M Chopkar S Kumar D R Bhandari P K Das and I
Manna ldquoDevelopment and characterization of Al2Cu and
Ag2Al nanoparticle dispersed water and ethylene glycol based
nanofluidrdquoMaterials Science and Engineering B vol 139 no 2-3 pp 141ndash148 2007
[17] B Ghasemi and S M Aminossadati ldquoBrownian motion ofnanoparticles in a triangular enclosure with natural convec-tionrdquo International Journal of Thermal Sciences vol 49 no 6pp 931ndash940 2010
[18] W Jiang G Ding H Peng and H Hu ldquoModeling of nanopar-ticlesrsquo aggregation and sedimentation in nanofluidrdquo CurrentApplied Physics vol 10 no 3 pp 934ndash941 2010
[19] N R Karthikeyan J Philip and B Raj ldquoEffect of clustering onthe thermal conductivity of nano fluidsrdquo Materials Chemistryand Physics vol 109 no 1 pp 50ndash55 2008
[20] A Cavalcanti T Hogg B Shirinzadeh and H C LiawldquoNanorobot communication techniques a comprehensive tuto-rialrdquo in Proceedings of the 9th International Conference on Con-trol Automation Robotics and Vision (ICARCV rsquo06) SingaporeDecember 2006
[21] R A Freitas Jr Basic Capabilities vol 1 of NanomedicineLandes Bioscience Georgetown Tex USA 1999
[22] R A Freitas Jr Biocompatibility vol 2A of NanomedicineLandes Bioscience Georgetown Tex USA 2003
[23] S H StrogatzNonlinear Dynamic and ChaosWith Applicationsto Physics Biology Chemistry and Engineering Addison-WesleyReading Mass USA 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of