Research Article Robust Adaptive PID Control of Robot...
14
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2013, Article ID 535437, 13 pages http://dx.doi.org/10.1155/2013/535437 Research Article Robust Adaptive PID Control of Robot Manipulator with Bounded Disturbances Jian Xu and Lei Qiao Department of Automation, Harbin Engineering University, Harbin 150001, China Correspondence should be addressed to Lei Qiao; [email protected] Received 6 July 2013; Accepted 1 October 2013 Academic Editor: Zhiguang Feng Copyright © 2013 J. Xu and L. Qiao. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. To solve the strong nonlinearity and coupling problems in robot manipulator control, two novel robust adaptive PID control schemes are proposed in this paper with known or unknown upper bound of the external disturbances. Invoking the two proposed controllers, the unknown bounded external disturbances can be compensated and the global asymptotical stability with respect to the manipulator positions and velocities is able to be guaranteed. As compared with the existing adaptive PD control methods, the designed control laws can enlarge the tolerable external disturbances, enhance the accuracy in finite-time trajectory tracking control, and improve the dynamic performance of the manipulator systems. e stability and convergence properties of the closed- loop system are analytically proved using Lyapunov stability theory and Barbalat’s lemma. Simulations are performed for a planner manipulator with two rotary degrees of freedom to illustrate the viability and the advantages of the proposed controllers. 1. Introduction Robot manipulators play an important part in modern indus- try by providing lower production cost, enhanced precision, quality, productivity, and efficiency. e control of rigid robot manipulators faces significant difficulties such as highly non- linear, coupled, and time-varying behaviors. Moreover, there always exist uncertainties in the system’s dynamic model, such as the external disturbances and parameter uncertainty, to name a few, which cause unstable performance of the robot manipulator systems. Since linear control methods are not suitable for strong coupled, nonlinear, and time-varying rigid robot manipulator systems, many nonlinear control schemes based on conven- tional PID control theory have been proposed to improve the control performance. In [1], the global asymptotic stability of a class of nonlinear PD-type controllers for position and motion control of robot manipulators is analyzed, and a global regulator constrained to deliver torques within pre- scribed limits of the actuator’s capabilities is proposed. is class of controllers, when rule-based or gain scheduling approaches are used, can get high performance control sys- tems. However, it has been shown that although the PD controller is robust with respect to uncertainties on inertial parameters and the global asymptotic stability is guaranteed, uncertainties on the gravity parameters may lead to undesired steady-state errors [2]. A PID control scheme can eliminate the steady-state errors, but it can only ensure local asymptotic stability. Moreover, to guarantee the stability, the gain matri- ces must satisfy complicated inequalities [3]. In [4], a new variable structure PID control scheme is designed for robot manipulators. Even through the global asymptotic stability of the controlled robot systems is analyzed, the bounds of system parameter matrices need to be known in the controller design. To further enhance the tracking performance of robot manipulator systems in presence of parametric uncertain- ties, significant efforts have been made to seek advanced control strategies. Robust and adaptive control schemes of robot manipulators have been the active research topics for many years. Robust control laws are used for external disturbances, unstructured dynamics, and other sources of uncertainties. Leitmann [5] and Corless and Leitmann [6] present a popular approach utilized for designing robust controller for robot manipulators. In an early application of the Corless-Leitmann approach to robot manipulators [7], a simple robust nonlinear control law is derived for -link robot manipulators using the well-known Lyapunov
Transcript of Research Article Robust Adaptive PID Control of Robot...

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 535437 13 pageshttpdxdoiorg1011552013535437
Research ArticleRobust Adaptive PID Control of Robot Manipulator withBounded Disturbances
Jian Xu and Lei Qiao
Department of Automation Harbin Engineering University Harbin 150001 China
Correspondence should be addressed to Lei Qiao qiaolei2008114106gmailcom
Received 6 July 2013 Accepted 1 October 2013
Academic Editor Zhiguang Feng
Copyright copy 2013 J Xu and L Qiao This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
To solve the strong nonlinearity and coupling problems in robot manipulator control two novel robust adaptive PID controlschemes are proposed in this paper with known or unknown upper bound of the external disturbances Invoking the two proposedcontrollers the unknown bounded external disturbances can be compensated and the global asymptotical stability with respectto the manipulator positions and velocities is able to be guaranteed As compared with the existing adaptive PD control methodsthe designed control laws can enlarge the tolerable external disturbances enhance the accuracy in finite-time trajectory trackingcontrol and improve the dynamic performance of the manipulator systemsThe stability and convergence properties of the closed-loop system are analytically proved using Lyapunov stability theory and Barbalatrsquos lemma Simulations are performed for a plannermanipulator with two rotary degrees of freedom to illustrate the viability and the advantages of the proposed controllers
1 Introduction
Robotmanipulators play an important part inmodern indus-try by providing lower production cost enhanced precisionquality productivity and efficiencyThe control of rigid robotmanipulators faces significant difficulties such as highly non-linear coupled and time-varying behaviors Moreover therealways exist uncertainties in the systemrsquos dynamic modelsuch as the external disturbances and parameter uncertaintyto name a few which cause unstable performance of the robotmanipulator systems
Since linear control methods are not suitable for strongcoupled nonlinear and time-varying rigid robotmanipulatorsystems many nonlinear control schemes based on conven-tional PID control theory have been proposed to improve thecontrol performance In [1] the global asymptotic stabilityof a class of nonlinear PD-type controllers for position andmotion control of robot manipulators is analyzed anda global regulator constrained to deliver torques within pre-scribed limits of the actuatorrsquos capabilities is proposed Thisclass of controllers when rule-based or gain schedulingapproaches are used can get high performance control sys-tems However it has been shown that although the PDcontroller is robust with respect to uncertainties on inertial
parameters and the global asymptotic stability is guaranteeduncertainties on the gravity parametersmay lead to undesiredsteady-state errors [2] A PID control scheme can eliminatethe steady-state errors but it can only ensure local asymptoticstability Moreover to guarantee the stability the gain matri-ces must satisfy complicated inequalities [3] In [4] a newvariable structure PID control scheme is designed for robotmanipulators Even through the global asymptotic stabilityof the controlled robot systems is analyzed the bounds ofsystemparametermatrices need to be known in the controllerdesign
To further enhance the tracking performance of robotmanipulator systems in presence of parametric uncertain-ties significant efforts have been made to seek advancedcontrol strategies Robust and adaptive control schemes ofrobot manipulators have been the active research topicsfor many years Robust control laws are used for externaldisturbances unstructured dynamics and other sources ofuncertainties Leitmann [5] and Corless and Leitmann [6]present a popular approach utilized for designing robustcontroller for robot manipulators In an early applicationof the Corless-Leitmann approach to robot manipulators[7] a simple robust nonlinear control law is derived for119899-link robot manipulators using the well-known Lyapunov
2 Mathematical Problems in Engineering
based theory of guaranteed stability of uncertain systemsThe uncertainty bounds needed to derive the control law andto prove that uniform ultimate boundedness of the trackingerrors only depends on the inertia parameters of the robotSome other robust controlmethods developed based on [5 6]are given in [8 9] However disturbances and unmodeleddynamics are not considered in the algorithms in [7ndash9] In[10] Spongrsquos method [7] is extended in such a manner thatthe control law is robust not only to uncertain inertia param-eters but also to unmodeled dynamics and disturbancesAnother improvement to the Spongrsquos methodology [7] issuggested in [11] A drawback of a single robust control isthat it cannot estimate the uncertainties and disturbancesonline which limits the adaptability of the controller to thechanged uncertain parameters Adaptive algorithm providesan effectiveway to solve this problem howevermost adaptivecontrols like most parameter adaptive methods may exhibitpoor robustness to unstructured dynamics and externaldisturbances Some related results can be seen in [12ndash15] Toresolve this a combination of robust control and adaptivealgorithm is investigated in a number of literature sources In[16] adaptive controllers are designed for robot manipulatorsystems that yield robust trajectory in spite of the unwantedeffects of the external disturbances and fast maneuveringof the manipulator The convergence rate is improved andthe transient oscillation is reduced considerably In [17]an adaptive control law for continuous-time direct adaptivecontrol of robot manipulator is presented The algorithmis suitable for swift adaptation to rapidly changing systemparameters And the uniform global asymptotic stabilitywith respect to the manipulator positions and velocities isguaranteed for unknown constant parameters In [18] adecentralized adaptive robust controller is investigated fortrajectory tracking of robot manipulator systems A distur-bance observer (DOB) is introduced in each local controllerto compensate for the low-passed coupled uncertainties andan adaptive sliding mode control term is employed to handlethe fast-changing components of the uncertainties beyondthe pass band of the DOB For some other results on robustand adaptive control the reader can refer to [19ndash22]
Furthermore other control algorithms such as fuzzylogic neural networks and PD control have been adoptedto combine with robust and adaptive control to cope withthe problems in robot manipulators control In [23] a robustadaptive compensation scheme is presented for compensa-tion of asymmetric deadzone dynamic friction and uncer-tainty in the direct-drive robot manipulator The estimationlaws of deadzone and friction are proposed to offset bothdeadzone of joint input torque and friction A model-freerecurrent wavelet cerebellar model articulation controller(RWCMAC) to mimic the ideal control law is employed toovercome some shortcomings of the traditional model-basedadaptive controller In [24] a novel robust decentralizedcontrol of electrically driven robot manipulator by adaptivefuzzy estimation and compensation uncertainty is proposedThe controller is designed via voltage control strategy A fuzzysystem is used to estimate and compensate uncertainty In[25 26] two adaptive PD control methods are investigatedfor trajectory tracking control of robot manipulators with
known and unknown upper bound of the external distur-bances respectively Both of the controllers are composedby a nonlinear PD feedback control law and an adaptivealgorithm The PD feedback control law can avoid largeinitial torque due to the large initial position error and theadaptive algorithm can make good dynamic performance forthe robot manipulator systems However the PD feedbackcontrol is rarely used in practical control systems That isbecause the pure differential element cannot be realized inpractice Moreover the differential action is very sensitiveto system noise as a result if the PD control is adoptedany disturbances in each systemrsquos element would result in bigfluctuation in systems outputHence the PDcontrol is indeedof no benefit for the improvement of the system dynamicperformance
In the present study two new robust adaptive PID con-trollers are introduced for an 119899 degree-of-freedom robotmanipulator systems with known or unknown upper boundof the external disturbances based on [1 25 26]The designedcontrollers are composited by PID control and robust adap-tive approach to cope with the external disturbances andunknown constant parameters that can arise As regards theinnovation of this study an integration element is embeddedin both PD control and robust adaptive algorithm basedon the existing adaptive PD control laws [25 26] With theadoption of the proposed controllers the tolerable externaldisturbances are enlarged and also the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced in contrast to thoseobtained with the usage of the adaptive PD controllers [2526] By choosing adequate Lyapunov candidate functions andutilizing Barbalatrsquos lemma the systemrsquos closed-loop stability isproven Some numerical results are also presented in order todemonstrate the control systems performance
This paper is organized as followsThe nonlinear dynam-ics of rigid robot manipulator and some useful properties ofdynamic systems are introduced in Section 2 In Section 3three necessary assumptions for control laws developmentand systems stability analysis are given and two robustadaptive PID controllers are designed for trajectory trackingcontrol of robot manipulator with known or unknownupper bound of the external disturbances respectively Thenumerical verification of the controllers and the discussionare presented in Section 4 A short conclusion is given inSection 5
2 Dynamic Model of Robot Manipulator andSome Properties
21 Dynamic Model Generally the dynamics of an 119899 degreeof freedom (119899-DOF) rigid link robot manipulator with rotaryjoints can be expressed as [27]
119872(119902) 119902 + 119862 (119902 119902) 119902 + 119866 (119902) + 119906 = 120591 (1)
where 119902(119905) isin 119877119899 is the vector of joint angles 119872(119902) isin 119877
119899times119899
is the inertia matrix of the manipulator 119862(119902 119902) isin 119877119899times119899 is
the matrix of Coriolis and centripetal forces 119866(119902) isin 119877119899 is
Mathematical Problems in Engineering 3
Y0
Y1
Y2
Z2
Z0
Z1
X0
X1
X2
Yn
Zn
120579n
1205792
1205791
1205790
Xn
Figure 1 The frames assignment of an 119899-DOF rigid robot manipulator
the vector of gravity factor 120591 isin 119877119899 is the vector of input
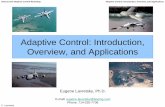
torque and 119906 isin 119877119899 is the vector of all external disturbancesFigure 1 presents the conceptual model of an 119899-DOF
rigid robot manipulator Assume that the manipulator ismounted on a fixed base so the dynamic coupling betweenthe manipulator and the base is neglected
22 Dynamic System Properties The dynamic systems givenby (1) exhibit the following properties that are utilized in thesubsequent control laws development and stability analysis[27]
(B1) The inertial matrix is symmetric and positive definitethat is 119872(119902) = 119872
119879
(119902) gt 0 forall119902 isin 119877119899 There are pos-
itive constants 119898119898
and 119898119872
such that 1198981198981199102
le
119910119879
119872(119902)119910 le 1198981198721199102 forall119910 isin 119877
119899
(B2) (119902)minus2119862(119902 119902) is a skew-symmetricmatrix for exam-ple 119904119879[(119902) minus 2119862(119902 119902)]119904 = 0 forall119904 isin 119877119899
(B3) 119872(119902) 119862(119902 119902) and 119866(119902) meet the linear condition of119872(119902)120572 + 119862(119902 119902)120573 + 119866(119902) = Ψ(119902 119902 120572 120573)119875 where 119875 isin
119877119898 is an unknown constant vector which describes
the mass characteristics of the manipulator and Ψ(119902119902 120572 120573) isin 119877
119899times119898 is a known regression matrix
3 Robust Adaptive PID Control ofRobot Manipulator
Firstly the following assumptions are imposed for themanip-ulator systems
(C1) The desired trajectory 119902119889and the time derivatives 119902
119889
and 119902119889are available and bounded signals
(C2) The external disturbances vector 119906 is bounded and itis confined within the following limit
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
(2)
where 1198871 1198872 1198873 and 119887
4are positive constants 119890 =
119902 minus 119902119889and 119890 = 119902 minus 119902
119889are the position tracking error
and the velocity tracking error respectively int1199050
119890119889119905 =
[int
119905
0
1198901119889119905 int
119905
0
119890119899119889119905]
119879
(C3) 119890(119905) = 119902 minus 119902
119889is existent and bounded in 119905
Here we introduce two variables 119909 and 119902119896 meanwhile let
119909 = 119890 + 120574119890 + int
119905
0
119890119889119905
119902119896= 119902119889minus 120574119890 minus int
119905
0
119890119889119905
(3)
where the parameter 120574 is a positive constant
4 Mathematical Problems in Engineering
With (3) giving
119902 minus 119902119896= 119909 (4)
With regard to the robot manipulator property (B3) let120572 = 119902119896 120573 = 119902
119896 one obtains
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (5)
Substituting (4) into the above equation yields
119872(119902) 119902 + 119862 (119902 119902) 119902 + 119866 (119902) minus119872(119902) minus 119862 (119902 119902) 119909
= Ψ (119902 119902 119902119896 119902119896) 119875
(6)
31 Robust Adaptive PID Controller Design with KnownUpperBound of the External Disturbances For the robot manipu-lator systems (1) if the upper bound of the external distur-bances signals 119906 is known motivated by [1 25] the controllerwhich makes the position and the velocity tracking errorsasymptotically converge to zero can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(7)
119881 = [V1 V
119899]119879
(8)
V119894= minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894) (9)
where is the estimate value of 119875Take the parameter estimation law of as
= minusΦΨ
119879
(119902 119902 119902119896 119902119896) 119909 (10)
The gain matrices are given by
119870119875= diag [119896
1198751 119896
119875119899]
119870119863= diag [119896
1198631 119896
119863119899]
119870119868= diag [119896
1198681 119896
119868119899]
(11)
where 119896119875119894 119896119863119894 119896119868119894(119894 = 1 2 119899) are all positive constants
and 119896119863119894= 119896119868119894 Φ isin 119877
119898times119898 is a positive definite and symmetricmatrix
The framework of the proposed control scheme is shownin Figure 2
Proof Considering the Lyapunov function candidate
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905) + 119879
Φminus1
]
(12)
with = minus 119875
From property (B1) one obtains
(119909119879
119872(119902) 119909)
1015840
= 119879
119872(119902) 119909 + 119909119879
(119902) 119909 + 119909119879
119872(119902)
= 119909119879
(119902) 119909 + 2119909119879
119872(119902)
(13)
With the positive definite and symmetric matrices 119870119875
119870119863119870119868 and Φ one gets
[119890119879
(119870119875+ 120574119870119863) 119890]
1015840
= 2119890119879
(119870119875+ 120574119870119863) 119890
[(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)]
1015840
= 2(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890
(119879
Φminus1
)
1015840
= 2119879
Φminus1
(14)
Therefore one obtains
=
1
2
119909119879
(119902) 119909 + 119909119879
119872(119902)
+ 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890 +
119879
Φminus1
(15)
Using (6) and (7) leads to
119909119879
119872(119902) = 119909119879
[120591 minus 119906 minus Ψ (119902 119902 119902119896 119902119896) 119875 minus 119862 (119902 119902) 119909]
= 119909119879
[minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)
+ Ψ (119902 119902 119902119896 119902119896) + 119881 minus 119906]
minus 119909119879
119862 (119902 119902) 119909
(16)
Considering 119909119879 = 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)119879 one gets
119909119879
(minus119870119875119890 minus 119870119863119890 minus 119870119868int
119905
0
119890119889119905)
= [ 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)
119879
] [minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)]
= minus 119890119879
119870119875119890 minus 119890119879
119870119863119890 minus 119890119879
119870119868(int
119905
0
119890119889119905) minus 120574119890119879
119870119875119890
minus 120574119890119879
119870119863119890 minus 120574119890119879
119870119868(int
119905
0
119890119889119905) minus (int
119905
0
119890119889119905)
119879
119870119875119890
minus (int
119905
0
119890119889119905)
119879
119870119863119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
(17)
Mathematical Problems in Engineering 5
Manipulatorq
1
S
qd
120591 = minusKPe minus KD minus KIe (intt0edt)
+ Ψ(q k k) + Vq q q P
= minusΦΨT(q q qk qk)xP
V =
i = minus(b1 + b2e + b3 e
+ b4intt
0edt)sgn(xi)
[1 n ]T
Figure 2 Framework of control law with known upper bound of the disturbances
Substituting (16) and (17) into (15) yields
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) +
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909
+ 119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896) + 119909
119879
(119881 minus 119906)
(18)
With property (B2) one obtains
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909 =
1
2
119909119879
[ (119902) minus 2119862 (119902 119902)] 119909 = 0
(19)
Note that
119909119879
Ψ (119902 119902 119902119896 119902119896) =
119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909
=
(20)
and one gets
119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896)
= 119879
Φminus1
[minusΦΨ119879
(119902 119902 119902119896 119902119896) 119909]
+ 119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909 = 0
(21)
Thus one obtains
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) + 119909119879
(119881 minus 119906)
(22)
Note that the following equalities and inequalities hold
119890119879
119870119863119890 =
119899
sum
119894=1
119896119863119894
1198902
119894 120574119890
119879
119870119875119890 =
119899
sum
119894=1
1205741198961198751198941198902
119894
(int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905) =
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) =
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
le
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
(23)
Hence one gets
= minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905) + 119909
119879
(119881 minus 119906)
le minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
6 Mathematical Problems in Engineering
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
(24)
Now considering the term of 119909119879(119881 minus 119906)
119909119879
119881 =
119899
sum
119894=1
119909119894[minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894)]
=
119899
sum
119894=1
[minus(1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
)1003816100381610038161003816119909119894
1003816100381610038161003816]
le
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816)
(25)
here the assumption (C2) has been usedNote that
minus119909119879
119906 le
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906 (26)
Defining 119909119879 = sum119899
119894=1|119909119894| gives
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816) +
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
(27)
With 119896119863119894= 119896119868119894gt 0 and 119896
119875119894gt 0 one obtains
119896119863119894minus
1
2
(119896119863119894+ 119896119868119894) = 0 120574119896
119875119894gt 0
119896119868119894minus
1
2
(119896119863119894+ 119896119868119894) = 0
(28)
Finally one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894 (29)
From the proof and analysis above we know that thefunction is negative and vanishes if and only if 119890(119905) = 0thus the position tracking error goes to zero as time goes toinfinity namely lim
119905rarrinfin119890(119905) = 0
According to the assumption (C3) we obtain that 119890(119905)
119877+
rarr 119877 is uniformly continuous [28] Consider the follow-ing formula holds
lim119905rarrinfin
int
119905
0
119890 (120591) 119889120591 = lim119905rarrinfin
[119890 (119905) minus 119890 (0)] = lim119905rarrinfin
119890 (119905) minus 119890 (0)
= minus119890 (0) lt infin
(30)
which implies that the limit lim119905rarrinfin
int
119905
0
119890(120591)119889120591 is existent andboundedTherefore it follows from the Barbalatrsquos lemma [29]that 119890(119905) rarr 0 as 119905 rarr infin that is lim
119905rarrinfin119890(119905) = 0
Hence the designed controller can guarantee the equilib-rium (119890 119890) = (0 0) globally asymptotically stable It is alsoseen that the parameter vector is bounded but does notnecessarily converge to zero
32 Robust Adaptive PID Controller Design with UnknownUpper Bound of the External Disturbances On the otherhand if the upper bound of the external disturbances signals119906 is unknown inspired by [1 26] the controllerwhich ensuresthe global asymptotical stability of the manipulator positionsand velocities can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(31)
119881 = minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 119909 (32)
119887 = 1205821120585 119909
119887 (0) = 0 (33)
120576 = minus1205822120576 120576 (0) = 0 (34)
where 119887 = 1198871+ 1198872+ 1198873+ 1198874 119887 = 119887 minus
119887 119887 is the estimate
value of 119887 120585 = max(1 119890 119890 int
119905
0
119890119889119905) 1205821and 120582
2are the
arbitrary positive constants and other parameters are definedas Section 31
The framework of the proposed control scheme is shownin Figure 3
Proof Consider the following Lyapunov function
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)
+ 119879
Φminus1
+ (120582minus1
1
1198872
+ 120582minus1
21205762
) ]
(35)
Based on the controller stability analysis with knownupper bound of the external disturbances in Section 31according to (24) one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879
119881 minus 119909119879
119906 + 120582minus1
1
119887119887 + 120582minus1
2120576 120576 (36)
Mathematical Problems in Engineering 7
Manipulatorq
1
S
qd120591 = minusKPe minus KD minus KIe (intt
0edt)
+ Ψ(q k k) + Vq q q P
V = minus( 120585)2
( 120585)x+ 1205762
= 1205821120585xˆ b
b
b
(0) = 0
= minus1205822120576
120576
b
120576(0) 0
= minusΦΨT(q q qk qk)xP
middotx
ne
Figure 3 Framework of control law with unknown upper bound of the disturbances
Substituting (32) and (34) into (36) yields
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879[
[
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
]
]
119909 minus 119909119879
119906 + 120582minus1
1
119887119887 minus 1205762
(37)Take into account that the following equalities and
inequalities hold
119909119879
119909 = 1199092
minus119909119879
119906 le 119909 sdot 119906
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
le 119887120585
119887 = minus
119887 = minus120582
1120585 119909
(38)
here the assumption (C2) and (33) have been usedTherefore one obtains
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 1199092
+ 119909 sdot (119887120585) minus119887120585 119909 minus 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
+
minus(119887120585)
2
1199092
+ (119887120585)
2
1199092
+ 1205762
120585 119909119887 minus 1205762
(119887120585)119909 minus 120576
4
(119887120585) 119909 + 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
1205764
(119887120585) 119909 + 120576
2
(39)From the definitions of (33) and (34) it can be easily
verified that 119887 gt 0 and 1205762
gt 0 as 119905 gt 0 and 120576 rarr 0 as119905 rarr infin Thus the condition lt 0 is satisfied According tothe Lyapunov stability theory andBarbalatrsquos lemma (see (30))
the convergence of 119890 and 119890 to zero is guaranteed and also theboundedness of the parameter vector is obtained
4 Simulation Experiments and Discussion
In order to illustrate the performance of the proposed robustadaptive PID controllers simulation results are given bymeans of MATLABSIMULINK A comparison between theadaptive PD controllers in [25 26] and the robust adaptivePID controllers derived in this study is carried out Thesimulation model is a two-degree-of-freedom planar rigidmanipulator with rotary joints According to (1) its dynamicequation can be described as follows [30]
[
11987211(1199022) 11987212(1199022)
11987212(1199022) 11987222(1199022)
] [
1199021
1199022
]
+ [
minus11986212(1199022) 1199022minus11986212(1199022) ( 1199021+ 1199022)
11986212(1199022) 1199021
0
]
sdot [
1199021
1199022
] + [
1198661(1199021 1199022) 119892
1198662(1199021 1199022) 119892
] = [
1205911
1205912
]
(40)
where
11987211(1199022) = (119898
1+ 1198982) 1199032
1+ 11989821199032
2+ 2119898211990311199032cos 1199022
11987212(1199022) = 119898
21199032
2+ 119898211990311199032cos 1199022
11987222(1199022) = 119898
21199032
2
11986212(1199022) = 119898
211990311199032sin 1199022
1198661(1199021 1199022) = (119898
1+ 1198982) 1199031cos 1199022+ 11989821199032cos (119902
1+ 1199022)
1198662(1199021 1199022) = 119898
21199032cos (119902
1+ 1199022)
(41)
At first linearize (40) and give the parameter matrices Ψand 119875
8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
based theory of guaranteed stability of uncertain systemsThe uncertainty bounds needed to derive the control law andto prove that uniform ultimate boundedness of the trackingerrors only depends on the inertia parameters of the robotSome other robust controlmethods developed based on [5 6]are given in [8 9] However disturbances and unmodeleddynamics are not considered in the algorithms in [7ndash9] In[10] Spongrsquos method [7] is extended in such a manner thatthe control law is robust not only to uncertain inertia param-eters but also to unmodeled dynamics and disturbancesAnother improvement to the Spongrsquos methodology [7] issuggested in [11] A drawback of a single robust control isthat it cannot estimate the uncertainties and disturbancesonline which limits the adaptability of the controller to thechanged uncertain parameters Adaptive algorithm providesan effectiveway to solve this problem howevermost adaptivecontrols like most parameter adaptive methods may exhibitpoor robustness to unstructured dynamics and externaldisturbances Some related results can be seen in [12ndash15] Toresolve this a combination of robust control and adaptivealgorithm is investigated in a number of literature sources In[16] adaptive controllers are designed for robot manipulatorsystems that yield robust trajectory in spite of the unwantedeffects of the external disturbances and fast maneuveringof the manipulator The convergence rate is improved andthe transient oscillation is reduced considerably In [17]an adaptive control law for continuous-time direct adaptivecontrol of robot manipulator is presented The algorithmis suitable for swift adaptation to rapidly changing systemparameters And the uniform global asymptotic stabilitywith respect to the manipulator positions and velocities isguaranteed for unknown constant parameters In [18] adecentralized adaptive robust controller is investigated fortrajectory tracking of robot manipulator systems A distur-bance observer (DOB) is introduced in each local controllerto compensate for the low-passed coupled uncertainties andan adaptive sliding mode control term is employed to handlethe fast-changing components of the uncertainties beyondthe pass band of the DOB For some other results on robustand adaptive control the reader can refer to [19ndash22]
Furthermore other control algorithms such as fuzzylogic neural networks and PD control have been adoptedto combine with robust and adaptive control to cope withthe problems in robot manipulators control In [23] a robustadaptive compensation scheme is presented for compensa-tion of asymmetric deadzone dynamic friction and uncer-tainty in the direct-drive robot manipulator The estimationlaws of deadzone and friction are proposed to offset bothdeadzone of joint input torque and friction A model-freerecurrent wavelet cerebellar model articulation controller(RWCMAC) to mimic the ideal control law is employed toovercome some shortcomings of the traditional model-basedadaptive controller In [24] a novel robust decentralizedcontrol of electrically driven robot manipulator by adaptivefuzzy estimation and compensation uncertainty is proposedThe controller is designed via voltage control strategy A fuzzysystem is used to estimate and compensate uncertainty In[25 26] two adaptive PD control methods are investigatedfor trajectory tracking control of robot manipulators with
known and unknown upper bound of the external distur-bances respectively Both of the controllers are composedby a nonlinear PD feedback control law and an adaptivealgorithm The PD feedback control law can avoid largeinitial torque due to the large initial position error and theadaptive algorithm can make good dynamic performance forthe robot manipulator systems However the PD feedbackcontrol is rarely used in practical control systems That isbecause the pure differential element cannot be realized inpractice Moreover the differential action is very sensitiveto system noise as a result if the PD control is adoptedany disturbances in each systemrsquos element would result in bigfluctuation in systems outputHence the PDcontrol is indeedof no benefit for the improvement of the system dynamicperformance
In the present study two new robust adaptive PID con-trollers are introduced for an 119899 degree-of-freedom robotmanipulator systems with known or unknown upper boundof the external disturbances based on [1 25 26]The designedcontrollers are composited by PID control and robust adap-tive approach to cope with the external disturbances andunknown constant parameters that can arise As regards theinnovation of this study an integration element is embeddedin both PD control and robust adaptive algorithm basedon the existing adaptive PD control laws [25 26] With theadoption of the proposed controllers the tolerable externaldisturbances are enlarged and also the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced in contrast to thoseobtained with the usage of the adaptive PD controllers [2526] By choosing adequate Lyapunov candidate functions andutilizing Barbalatrsquos lemma the systemrsquos closed-loop stability isproven Some numerical results are also presented in order todemonstrate the control systems performance
This paper is organized as followsThe nonlinear dynam-ics of rigid robot manipulator and some useful properties ofdynamic systems are introduced in Section 2 In Section 3three necessary assumptions for control laws developmentand systems stability analysis are given and two robustadaptive PID controllers are designed for trajectory trackingcontrol of robot manipulator with known or unknownupper bound of the external disturbances respectively Thenumerical verification of the controllers and the discussionare presented in Section 4 A short conclusion is given inSection 5
2 Dynamic Model of Robot Manipulator andSome Properties
21 Dynamic Model Generally the dynamics of an 119899 degreeof freedom (119899-DOF) rigid link robot manipulator with rotaryjoints can be expressed as [27]
119872(119902) 119902 + 119862 (119902 119902) 119902 + 119866 (119902) + 119906 = 120591 (1)
where 119902(119905) isin 119877119899 is the vector of joint angles 119872(119902) isin 119877
119899times119899
is the inertia matrix of the manipulator 119862(119902 119902) isin 119877119899times119899 is
the matrix of Coriolis and centripetal forces 119866(119902) isin 119877119899 is
Mathematical Problems in Engineering 3
Y0
Y1
Y2
Z2
Z0
Z1
X0
X1
X2
Yn
Zn
120579n
1205792
1205791
1205790
Xn
Figure 1 The frames assignment of an 119899-DOF rigid robot manipulator
the vector of gravity factor 120591 isin 119877119899 is the vector of input
torque and 119906 isin 119877119899 is the vector of all external disturbancesFigure 1 presents the conceptual model of an 119899-DOF
rigid robot manipulator Assume that the manipulator ismounted on a fixed base so the dynamic coupling betweenthe manipulator and the base is neglected
22 Dynamic System Properties The dynamic systems givenby (1) exhibit the following properties that are utilized in thesubsequent control laws development and stability analysis[27]
(B1) The inertial matrix is symmetric and positive definitethat is 119872(119902) = 119872
119879
(119902) gt 0 forall119902 isin 119877119899 There are pos-
itive constants 119898119898
and 119898119872
such that 1198981198981199102
le
119910119879
119872(119902)119910 le 1198981198721199102 forall119910 isin 119877
119899
(B2) (119902)minus2119862(119902 119902) is a skew-symmetricmatrix for exam-ple 119904119879[(119902) minus 2119862(119902 119902)]119904 = 0 forall119904 isin 119877119899
(B3) 119872(119902) 119862(119902 119902) and 119866(119902) meet the linear condition of119872(119902)120572 + 119862(119902 119902)120573 + 119866(119902) = Ψ(119902 119902 120572 120573)119875 where 119875 isin
119877119898 is an unknown constant vector which describes
the mass characteristics of the manipulator and Ψ(119902119902 120572 120573) isin 119877
119899times119898 is a known regression matrix
3 Robust Adaptive PID Control ofRobot Manipulator
Firstly the following assumptions are imposed for themanip-ulator systems
(C1) The desired trajectory 119902119889and the time derivatives 119902
119889
and 119902119889are available and bounded signals
(C2) The external disturbances vector 119906 is bounded and itis confined within the following limit
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
(2)
where 1198871 1198872 1198873 and 119887
4are positive constants 119890 =
119902 minus 119902119889and 119890 = 119902 minus 119902
119889are the position tracking error
and the velocity tracking error respectively int1199050
119890119889119905 =
[int
119905
0
1198901119889119905 int
119905
0
119890119899119889119905]
119879
(C3) 119890(119905) = 119902 minus 119902
119889is existent and bounded in 119905
Here we introduce two variables 119909 and 119902119896 meanwhile let
119909 = 119890 + 120574119890 + int
119905
0
119890119889119905
119902119896= 119902119889minus 120574119890 minus int
119905
0
119890119889119905
(3)
where the parameter 120574 is a positive constant
4 Mathematical Problems in Engineering
With (3) giving
119902 minus 119902119896= 119909 (4)
With regard to the robot manipulator property (B3) let120572 = 119902119896 120573 = 119902
119896 one obtains
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (5)
Substituting (4) into the above equation yields
119872(119902) 119902 + 119862 (119902 119902) 119902 + 119866 (119902) minus119872(119902) minus 119862 (119902 119902) 119909
= Ψ (119902 119902 119902119896 119902119896) 119875
(6)
31 Robust Adaptive PID Controller Design with KnownUpperBound of the External Disturbances For the robot manipu-lator systems (1) if the upper bound of the external distur-bances signals 119906 is known motivated by [1 25] the controllerwhich makes the position and the velocity tracking errorsasymptotically converge to zero can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(7)
119881 = [V1 V
119899]119879
(8)
V119894= minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894) (9)
where is the estimate value of 119875Take the parameter estimation law of as
= minusΦΨ
119879
(119902 119902 119902119896 119902119896) 119909 (10)
The gain matrices are given by
119870119875= diag [119896
1198751 119896
119875119899]
119870119863= diag [119896
1198631 119896
119863119899]
119870119868= diag [119896
1198681 119896
119868119899]
(11)
where 119896119875119894 119896119863119894 119896119868119894(119894 = 1 2 119899) are all positive constants
and 119896119863119894= 119896119868119894 Φ isin 119877
119898times119898 is a positive definite and symmetricmatrix
The framework of the proposed control scheme is shownin Figure 2
Proof Considering the Lyapunov function candidate
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905) + 119879
Φminus1
]
(12)
with = minus 119875
From property (B1) one obtains
(119909119879
119872(119902) 119909)
1015840
= 119879
119872(119902) 119909 + 119909119879
(119902) 119909 + 119909119879
119872(119902)
= 119909119879
(119902) 119909 + 2119909119879
119872(119902)
(13)
With the positive definite and symmetric matrices 119870119875
119870119863119870119868 and Φ one gets
[119890119879
(119870119875+ 120574119870119863) 119890]
1015840
= 2119890119879
(119870119875+ 120574119870119863) 119890
[(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)]
1015840
= 2(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890
(119879
Φminus1
)
1015840
= 2119879
Φminus1
(14)
Therefore one obtains
=
1
2
119909119879
(119902) 119909 + 119909119879
119872(119902)
+ 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890 +
119879
Φminus1
(15)
Using (6) and (7) leads to
119909119879
119872(119902) = 119909119879
[120591 minus 119906 minus Ψ (119902 119902 119902119896 119902119896) 119875 minus 119862 (119902 119902) 119909]
= 119909119879
[minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)
+ Ψ (119902 119902 119902119896 119902119896) + 119881 minus 119906]
minus 119909119879
119862 (119902 119902) 119909
(16)
Considering 119909119879 = 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)119879 one gets
119909119879
(minus119870119875119890 minus 119870119863119890 minus 119870119868int
119905
0
119890119889119905)
= [ 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)
119879
] [minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)]
= minus 119890119879
119870119875119890 minus 119890119879
119870119863119890 minus 119890119879
119870119868(int
119905
0
119890119889119905) minus 120574119890119879
119870119875119890
minus 120574119890119879
119870119863119890 minus 120574119890119879
119870119868(int
119905
0
119890119889119905) minus (int
119905
0
119890119889119905)
119879
119870119875119890
minus (int
119905
0
119890119889119905)
119879
119870119863119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
(17)
Mathematical Problems in Engineering 5
Manipulatorq
1
S
qd
120591 = minusKPe minus KD minus KIe (intt0edt)
+ Ψ(q k k) + Vq q q P
= minusΦΨT(q q qk qk)xP
V =
i = minus(b1 + b2e + b3 e
+ b4intt
0edt)sgn(xi)
[1 n ]T
Figure 2 Framework of control law with known upper bound of the disturbances
Substituting (16) and (17) into (15) yields
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) +
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909
+ 119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896) + 119909
119879
(119881 minus 119906)
(18)
With property (B2) one obtains
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909 =
1
2
119909119879
[ (119902) minus 2119862 (119902 119902)] 119909 = 0
(19)
Note that
119909119879
Ψ (119902 119902 119902119896 119902119896) =
119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909
=
(20)
and one gets
119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896)
= 119879
Φminus1
[minusΦΨ119879
(119902 119902 119902119896 119902119896) 119909]
+ 119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909 = 0
(21)
Thus one obtains
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) + 119909119879
(119881 minus 119906)
(22)
Note that the following equalities and inequalities hold
119890119879
119870119863119890 =
119899
sum
119894=1
119896119863119894
1198902
119894 120574119890
119879
119870119875119890 =
119899
sum
119894=1
1205741198961198751198941198902
119894
(int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905) =
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) =
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
le
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
(23)
Hence one gets
= minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905) + 119909
119879
(119881 minus 119906)
le minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
6 Mathematical Problems in Engineering
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
(24)
Now considering the term of 119909119879(119881 minus 119906)
119909119879
119881 =
119899
sum
119894=1
119909119894[minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894)]
=
119899
sum
119894=1
[minus(1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
)1003816100381610038161003816119909119894
1003816100381610038161003816]
le
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816)
(25)
here the assumption (C2) has been usedNote that
minus119909119879
119906 le
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906 (26)
Defining 119909119879 = sum119899
119894=1|119909119894| gives
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816) +
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
(27)
With 119896119863119894= 119896119868119894gt 0 and 119896
119875119894gt 0 one obtains
119896119863119894minus
1
2
(119896119863119894+ 119896119868119894) = 0 120574119896
119875119894gt 0
119896119868119894minus
1
2
(119896119863119894+ 119896119868119894) = 0
(28)
Finally one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894 (29)
From the proof and analysis above we know that thefunction is negative and vanishes if and only if 119890(119905) = 0thus the position tracking error goes to zero as time goes toinfinity namely lim
119905rarrinfin119890(119905) = 0
According to the assumption (C3) we obtain that 119890(119905)
119877+
rarr 119877 is uniformly continuous [28] Consider the follow-ing formula holds
lim119905rarrinfin
int
119905
0
119890 (120591) 119889120591 = lim119905rarrinfin
[119890 (119905) minus 119890 (0)] = lim119905rarrinfin
119890 (119905) minus 119890 (0)
= minus119890 (0) lt infin
(30)
which implies that the limit lim119905rarrinfin
int
119905
0
119890(120591)119889120591 is existent andboundedTherefore it follows from the Barbalatrsquos lemma [29]that 119890(119905) rarr 0 as 119905 rarr infin that is lim
119905rarrinfin119890(119905) = 0
Hence the designed controller can guarantee the equilib-rium (119890 119890) = (0 0) globally asymptotically stable It is alsoseen that the parameter vector is bounded but does notnecessarily converge to zero
32 Robust Adaptive PID Controller Design with UnknownUpper Bound of the External Disturbances On the otherhand if the upper bound of the external disturbances signals119906 is unknown inspired by [1 26] the controllerwhich ensuresthe global asymptotical stability of the manipulator positionsand velocities can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(31)
119881 = minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 119909 (32)
119887 = 1205821120585 119909
119887 (0) = 0 (33)
120576 = minus1205822120576 120576 (0) = 0 (34)
where 119887 = 1198871+ 1198872+ 1198873+ 1198874 119887 = 119887 minus
119887 119887 is the estimate
value of 119887 120585 = max(1 119890 119890 int
119905
0
119890119889119905) 1205821and 120582
2are the
arbitrary positive constants and other parameters are definedas Section 31
The framework of the proposed control scheme is shownin Figure 3
Proof Consider the following Lyapunov function
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)
+ 119879
Φminus1
+ (120582minus1
1
1198872
+ 120582minus1
21205762
) ]
(35)
Based on the controller stability analysis with knownupper bound of the external disturbances in Section 31according to (24) one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879
119881 minus 119909119879
119906 + 120582minus1
1
119887119887 + 120582minus1
2120576 120576 (36)
Mathematical Problems in Engineering 7
Manipulatorq
1
S
qd120591 = minusKPe minus KD minus KIe (intt
0edt)
+ Ψ(q k k) + Vq q q P
V = minus( 120585)2
( 120585)x+ 1205762
= 1205821120585xˆ b
b
b
(0) = 0
= minus1205822120576
120576
b
120576(0) 0
= minusΦΨT(q q qk qk)xP
middotx
ne
Figure 3 Framework of control law with unknown upper bound of the disturbances
Substituting (32) and (34) into (36) yields
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879[
[
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
]
]
119909 minus 119909119879
119906 + 120582minus1
1
119887119887 minus 1205762
(37)Take into account that the following equalities and
inequalities hold
119909119879
119909 = 1199092
minus119909119879
119906 le 119909 sdot 119906
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
le 119887120585
119887 = minus
119887 = minus120582
1120585 119909
(38)
here the assumption (C2) and (33) have been usedTherefore one obtains
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 1199092
+ 119909 sdot (119887120585) minus119887120585 119909 minus 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
+
minus(119887120585)
2
1199092
+ (119887120585)
2
1199092
+ 1205762
120585 119909119887 minus 1205762
(119887120585)119909 minus 120576
4
(119887120585) 119909 + 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
1205764
(119887120585) 119909 + 120576
2
(39)From the definitions of (33) and (34) it can be easily
verified that 119887 gt 0 and 1205762
gt 0 as 119905 gt 0 and 120576 rarr 0 as119905 rarr infin Thus the condition lt 0 is satisfied According tothe Lyapunov stability theory andBarbalatrsquos lemma (see (30))
the convergence of 119890 and 119890 to zero is guaranteed and also theboundedness of the parameter vector is obtained
4 Simulation Experiments and Discussion
In order to illustrate the performance of the proposed robustadaptive PID controllers simulation results are given bymeans of MATLABSIMULINK A comparison between theadaptive PD controllers in [25 26] and the robust adaptivePID controllers derived in this study is carried out Thesimulation model is a two-degree-of-freedom planar rigidmanipulator with rotary joints According to (1) its dynamicequation can be described as follows [30]
[
11987211(1199022) 11987212(1199022)
11987212(1199022) 11987222(1199022)
] [
1199021
1199022
]
+ [
minus11986212(1199022) 1199022minus11986212(1199022) ( 1199021+ 1199022)
11986212(1199022) 1199021
0
]
sdot [
1199021
1199022
] + [
1198661(1199021 1199022) 119892
1198662(1199021 1199022) 119892
] = [
1205911
1205912
]
(40)
where
11987211(1199022) = (119898
1+ 1198982) 1199032
1+ 11989821199032
2+ 2119898211990311199032cos 1199022
11987212(1199022) = 119898
21199032
2+ 119898211990311199032cos 1199022
11987222(1199022) = 119898
21199032
2
11986212(1199022) = 119898
211990311199032sin 1199022
1198661(1199021 1199022) = (119898
1+ 1198982) 1199031cos 1199022+ 11989821199032cos (119902
1+ 1199022)
1198662(1199021 1199022) = 119898
21199032cos (119902
1+ 1199022)
(41)
At first linearize (40) and give the parameter matrices Ψand 119875
8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Y0
Y1
Y2
Z2
Z0
Z1
X0
X1
X2
Yn
Zn
120579n
1205792
1205791
1205790
Xn
Figure 1 The frames assignment of an 119899-DOF rigid robot manipulator
the vector of gravity factor 120591 isin 119877119899 is the vector of input
torque and 119906 isin 119877119899 is the vector of all external disturbancesFigure 1 presents the conceptual model of an 119899-DOF
rigid robot manipulator Assume that the manipulator ismounted on a fixed base so the dynamic coupling betweenthe manipulator and the base is neglected
22 Dynamic System Properties The dynamic systems givenby (1) exhibit the following properties that are utilized in thesubsequent control laws development and stability analysis[27]
(B1) The inertial matrix is symmetric and positive definitethat is 119872(119902) = 119872
119879
(119902) gt 0 forall119902 isin 119877119899 There are pos-
itive constants 119898119898
and 119898119872
such that 1198981198981199102
le
119910119879
119872(119902)119910 le 1198981198721199102 forall119910 isin 119877
119899
(B2) (119902)minus2119862(119902 119902) is a skew-symmetricmatrix for exam-ple 119904119879[(119902) minus 2119862(119902 119902)]119904 = 0 forall119904 isin 119877119899
(B3) 119872(119902) 119862(119902 119902) and 119866(119902) meet the linear condition of119872(119902)120572 + 119862(119902 119902)120573 + 119866(119902) = Ψ(119902 119902 120572 120573)119875 where 119875 isin
119877119898 is an unknown constant vector which describes
the mass characteristics of the manipulator and Ψ(119902119902 120572 120573) isin 119877
119899times119898 is a known regression matrix
3 Robust Adaptive PID Control ofRobot Manipulator
Firstly the following assumptions are imposed for themanip-ulator systems
(C1) The desired trajectory 119902119889and the time derivatives 119902
119889
and 119902119889are available and bounded signals
(C2) The external disturbances vector 119906 is bounded and itis confined within the following limit
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
(2)
where 1198871 1198872 1198873 and 119887
4are positive constants 119890 =
119902 minus 119902119889and 119890 = 119902 minus 119902
119889are the position tracking error
and the velocity tracking error respectively int1199050
119890119889119905 =
[int
119905
0
1198901119889119905 int
119905
0
119890119899119889119905]
119879
(C3) 119890(119905) = 119902 minus 119902
119889is existent and bounded in 119905
Here we introduce two variables 119909 and 119902119896 meanwhile let
119909 = 119890 + 120574119890 + int
119905
0
119890119889119905
119902119896= 119902119889minus 120574119890 minus int
119905
0
119890119889119905
(3)
where the parameter 120574 is a positive constant
4 Mathematical Problems in Engineering
With (3) giving
119902 minus 119902119896= 119909 (4)
With regard to the robot manipulator property (B3) let120572 = 119902119896 120573 = 119902
119896 one obtains
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (5)
Substituting (4) into the above equation yields
119872(119902) 119902 + 119862 (119902 119902) 119902 + 119866 (119902) minus119872(119902) minus 119862 (119902 119902) 119909
= Ψ (119902 119902 119902119896 119902119896) 119875
(6)
31 Robust Adaptive PID Controller Design with KnownUpperBound of the External Disturbances For the robot manipu-lator systems (1) if the upper bound of the external distur-bances signals 119906 is known motivated by [1 25] the controllerwhich makes the position and the velocity tracking errorsasymptotically converge to zero can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(7)
119881 = [V1 V
119899]119879
(8)
V119894= minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894) (9)
where is the estimate value of 119875Take the parameter estimation law of as
= minusΦΨ
119879
(119902 119902 119902119896 119902119896) 119909 (10)
The gain matrices are given by
119870119875= diag [119896
1198751 119896
119875119899]
119870119863= diag [119896
1198631 119896
119863119899]
119870119868= diag [119896
1198681 119896
119868119899]
(11)
where 119896119875119894 119896119863119894 119896119868119894(119894 = 1 2 119899) are all positive constants
and 119896119863119894= 119896119868119894 Φ isin 119877
119898times119898 is a positive definite and symmetricmatrix
The framework of the proposed control scheme is shownin Figure 2
Proof Considering the Lyapunov function candidate
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905) + 119879
Φminus1
]
(12)
with = minus 119875
From property (B1) one obtains
(119909119879
119872(119902) 119909)
1015840
= 119879
119872(119902) 119909 + 119909119879
(119902) 119909 + 119909119879
119872(119902)
= 119909119879
(119902) 119909 + 2119909119879
119872(119902)
(13)
With the positive definite and symmetric matrices 119870119875
119870119863119870119868 and Φ one gets
[119890119879
(119870119875+ 120574119870119863) 119890]
1015840
= 2119890119879
(119870119875+ 120574119870119863) 119890
[(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)]
1015840
= 2(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890
(119879
Φminus1
)
1015840
= 2119879
Φminus1
(14)
Therefore one obtains
=
1
2
119909119879
(119902) 119909 + 119909119879
119872(119902)
+ 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890 +
119879
Φminus1
(15)
Using (6) and (7) leads to
119909119879
119872(119902) = 119909119879
[120591 minus 119906 minus Ψ (119902 119902 119902119896 119902119896) 119875 minus 119862 (119902 119902) 119909]
= 119909119879
[minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)
+ Ψ (119902 119902 119902119896 119902119896) + 119881 minus 119906]
minus 119909119879
119862 (119902 119902) 119909
(16)
Considering 119909119879 = 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)119879 one gets
119909119879
(minus119870119875119890 minus 119870119863119890 minus 119870119868int
119905
0
119890119889119905)
= [ 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)
119879
] [minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)]
= minus 119890119879
119870119875119890 minus 119890119879
119870119863119890 minus 119890119879
119870119868(int
119905
0
119890119889119905) minus 120574119890119879
119870119875119890
minus 120574119890119879
119870119863119890 minus 120574119890119879
119870119868(int
119905
0
119890119889119905) minus (int
119905
0
119890119889119905)
119879
119870119875119890
minus (int
119905
0
119890119889119905)
119879
119870119863119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
(17)
Mathematical Problems in Engineering 5
Manipulatorq
1
S
qd
120591 = minusKPe minus KD minus KIe (intt0edt)
+ Ψ(q k k) + Vq q q P
= minusΦΨT(q q qk qk)xP
V =
i = minus(b1 + b2e + b3 e
+ b4intt
0edt)sgn(xi)
[1 n ]T
Figure 2 Framework of control law with known upper bound of the disturbances
Substituting (16) and (17) into (15) yields
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) +
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909
+ 119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896) + 119909
119879
(119881 minus 119906)
(18)
With property (B2) one obtains
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909 =
1
2
119909119879
[ (119902) minus 2119862 (119902 119902)] 119909 = 0
(19)
Note that
119909119879
Ψ (119902 119902 119902119896 119902119896) =
119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909
=
(20)
and one gets
119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896)
= 119879
Φminus1
[minusΦΨ119879
(119902 119902 119902119896 119902119896) 119909]
+ 119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909 = 0
(21)
Thus one obtains
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) + 119909119879
(119881 minus 119906)
(22)
Note that the following equalities and inequalities hold
119890119879
119870119863119890 =
119899
sum
119894=1
119896119863119894
1198902
119894 120574119890
119879
119870119875119890 =
119899
sum
119894=1
1205741198961198751198941198902
119894
(int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905) =
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) =
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
le
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
(23)
Hence one gets
= minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905) + 119909
119879
(119881 minus 119906)
le minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
6 Mathematical Problems in Engineering
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
(24)
Now considering the term of 119909119879(119881 minus 119906)
119909119879
119881 =
119899
sum
119894=1
119909119894[minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894)]
=
119899
sum
119894=1
[minus(1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
)1003816100381610038161003816119909119894
1003816100381610038161003816]
le
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816)
(25)
here the assumption (C2) has been usedNote that
minus119909119879
119906 le
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906 (26)
Defining 119909119879 = sum119899
119894=1|119909119894| gives
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816) +
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
(27)
With 119896119863119894= 119896119868119894gt 0 and 119896
119875119894gt 0 one obtains
119896119863119894minus
1
2
(119896119863119894+ 119896119868119894) = 0 120574119896
119875119894gt 0
119896119868119894minus
1
2
(119896119863119894+ 119896119868119894) = 0
(28)
Finally one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894 (29)
From the proof and analysis above we know that thefunction is negative and vanishes if and only if 119890(119905) = 0thus the position tracking error goes to zero as time goes toinfinity namely lim
119905rarrinfin119890(119905) = 0
According to the assumption (C3) we obtain that 119890(119905)
119877+
rarr 119877 is uniformly continuous [28] Consider the follow-ing formula holds
lim119905rarrinfin
int
119905
0
119890 (120591) 119889120591 = lim119905rarrinfin
[119890 (119905) minus 119890 (0)] = lim119905rarrinfin
119890 (119905) minus 119890 (0)
= minus119890 (0) lt infin
(30)
which implies that the limit lim119905rarrinfin
int
119905
0
119890(120591)119889120591 is existent andboundedTherefore it follows from the Barbalatrsquos lemma [29]that 119890(119905) rarr 0 as 119905 rarr infin that is lim
119905rarrinfin119890(119905) = 0
Hence the designed controller can guarantee the equilib-rium (119890 119890) = (0 0) globally asymptotically stable It is alsoseen that the parameter vector is bounded but does notnecessarily converge to zero
32 Robust Adaptive PID Controller Design with UnknownUpper Bound of the External Disturbances On the otherhand if the upper bound of the external disturbances signals119906 is unknown inspired by [1 26] the controllerwhich ensuresthe global asymptotical stability of the manipulator positionsand velocities can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(31)
119881 = minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 119909 (32)
119887 = 1205821120585 119909
119887 (0) = 0 (33)
120576 = minus1205822120576 120576 (0) = 0 (34)
where 119887 = 1198871+ 1198872+ 1198873+ 1198874 119887 = 119887 minus
119887 119887 is the estimate
value of 119887 120585 = max(1 119890 119890 int
119905
0
119890119889119905) 1205821and 120582
2are the
arbitrary positive constants and other parameters are definedas Section 31
The framework of the proposed control scheme is shownin Figure 3
Proof Consider the following Lyapunov function
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)
+ 119879
Φminus1
+ (120582minus1
1
1198872
+ 120582minus1
21205762
) ]
(35)
Based on the controller stability analysis with knownupper bound of the external disturbances in Section 31according to (24) one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879
119881 minus 119909119879
119906 + 120582minus1
1
119887119887 + 120582minus1
2120576 120576 (36)
Mathematical Problems in Engineering 7
Manipulatorq
1
S
qd120591 = minusKPe minus KD minus KIe (intt
0edt)
+ Ψ(q k k) + Vq q q P
V = minus( 120585)2
( 120585)x+ 1205762
= 1205821120585xˆ b
b
b
(0) = 0
= minus1205822120576
120576
b
120576(0) 0
= minusΦΨT(q q qk qk)xP
middotx
ne
Figure 3 Framework of control law with unknown upper bound of the disturbances
Substituting (32) and (34) into (36) yields
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879[
[
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
]
]
119909 minus 119909119879
119906 + 120582minus1
1
119887119887 minus 1205762
(37)Take into account that the following equalities and
inequalities hold
119909119879
119909 = 1199092
minus119909119879
119906 le 119909 sdot 119906
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
le 119887120585
119887 = minus
119887 = minus120582
1120585 119909
(38)
here the assumption (C2) and (33) have been usedTherefore one obtains
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 1199092
+ 119909 sdot (119887120585) minus119887120585 119909 minus 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
+
minus(119887120585)
2
1199092
+ (119887120585)
2
1199092
+ 1205762
120585 119909119887 minus 1205762
(119887120585)119909 minus 120576
4
(119887120585) 119909 + 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
1205764
(119887120585) 119909 + 120576
2
(39)From the definitions of (33) and (34) it can be easily
verified that 119887 gt 0 and 1205762
gt 0 as 119905 gt 0 and 120576 rarr 0 as119905 rarr infin Thus the condition lt 0 is satisfied According tothe Lyapunov stability theory andBarbalatrsquos lemma (see (30))
the convergence of 119890 and 119890 to zero is guaranteed and also theboundedness of the parameter vector is obtained
4 Simulation Experiments and Discussion
In order to illustrate the performance of the proposed robustadaptive PID controllers simulation results are given bymeans of MATLABSIMULINK A comparison between theadaptive PD controllers in [25 26] and the robust adaptivePID controllers derived in this study is carried out Thesimulation model is a two-degree-of-freedom planar rigidmanipulator with rotary joints According to (1) its dynamicequation can be described as follows [30]
[
11987211(1199022) 11987212(1199022)
11987212(1199022) 11987222(1199022)
] [
1199021
1199022
]
+ [
minus11986212(1199022) 1199022minus11986212(1199022) ( 1199021+ 1199022)
11986212(1199022) 1199021
0
]
sdot [
1199021
1199022
] + [
1198661(1199021 1199022) 119892
1198662(1199021 1199022) 119892
] = [
1205911
1205912
]
(40)
where
11987211(1199022) = (119898
1+ 1198982) 1199032
1+ 11989821199032
2+ 2119898211990311199032cos 1199022
11987212(1199022) = 119898
21199032
2+ 119898211990311199032cos 1199022
11987222(1199022) = 119898
21199032
2
11986212(1199022) = 119898
211990311199032sin 1199022
1198661(1199021 1199022) = (119898
1+ 1198982) 1199031cos 1199022+ 11989821199032cos (119902
1+ 1199022)
1198662(1199021 1199022) = 119898
21199032cos (119902
1+ 1199022)
(41)
At first linearize (40) and give the parameter matrices Ψand 119875
8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
With (3) giving
119902 minus 119902119896= 119909 (4)
With regard to the robot manipulator property (B3) let120572 = 119902119896 120573 = 119902
119896 one obtains
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (5)
Substituting (4) into the above equation yields
119872(119902) 119902 + 119862 (119902 119902) 119902 + 119866 (119902) minus119872(119902) minus 119862 (119902 119902) 119909
= Ψ (119902 119902 119902119896 119902119896) 119875
(6)
31 Robust Adaptive PID Controller Design with KnownUpperBound of the External Disturbances For the robot manipu-lator systems (1) if the upper bound of the external distur-bances signals 119906 is known motivated by [1 25] the controllerwhich makes the position and the velocity tracking errorsasymptotically converge to zero can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(7)
119881 = [V1 V
119899]119879
(8)
V119894= minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894) (9)
where is the estimate value of 119875Take the parameter estimation law of as
= minusΦΨ
119879
(119902 119902 119902119896 119902119896) 119909 (10)
The gain matrices are given by
119870119875= diag [119896
1198751 119896
119875119899]
119870119863= diag [119896
1198631 119896
119863119899]
119870119868= diag [119896
1198681 119896
119868119899]
(11)
where 119896119875119894 119896119863119894 119896119868119894(119894 = 1 2 119899) are all positive constants
and 119896119863119894= 119896119868119894 Φ isin 119877
119898times119898 is a positive definite and symmetricmatrix
The framework of the proposed control scheme is shownin Figure 2
Proof Considering the Lyapunov function candidate
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905) + 119879
Φminus1
]
(12)
with = minus 119875
From property (B1) one obtains
(119909119879
119872(119902) 119909)
1015840
= 119879
119872(119902) 119909 + 119909119879
(119902) 119909 + 119909119879
119872(119902)
= 119909119879
(119902) 119909 + 2119909119879
119872(119902)
(13)
With the positive definite and symmetric matrices 119870119875
119870119863119870119868 and Φ one gets
[119890119879
(119870119875+ 120574119870119863) 119890]
1015840
= 2119890119879
(119870119875+ 120574119870119863) 119890
[(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)]
1015840
= 2(int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890
(119879
Φminus1
)
1015840
= 2119879
Φminus1
(14)
Therefore one obtains
=
1
2
119909119879
(119902) 119909 + 119909119879
119872(119902)
+ 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) 119890 +
119879
Φminus1
(15)
Using (6) and (7) leads to
119909119879
119872(119902) = 119909119879
[120591 minus 119906 minus Ψ (119902 119902 119902119896 119902119896) 119875 minus 119862 (119902 119902) 119909]
= 119909119879
[minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)
+ Ψ (119902 119902 119902119896 119902119896) + 119881 minus 119906]
minus 119909119879
119862 (119902 119902) 119909
(16)
Considering 119909119879 = 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)119879 one gets
119909119879
(minus119870119875119890 minus 119870119863119890 minus 119870119868int
119905
0
119890119889119905)
= [ 119890119879
+ 120574119890119879
+ (int
119905
0
119890119889119905)
119879
] [minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905)]
= minus 119890119879
119870119875119890 minus 119890119879
119870119863119890 minus 119890119879
119870119868(int
119905
0
119890119889119905) minus 120574119890119879
119870119875119890
minus 120574119890119879
119870119863119890 minus 120574119890119879
119870119868(int
119905
0
119890119889119905) minus (int
119905
0
119890119889119905)
119879
119870119875119890
minus (int
119905
0
119890119889119905)
119879
119870119863119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
(17)
Mathematical Problems in Engineering 5
Manipulatorq
1
S
qd
120591 = minusKPe minus KD minus KIe (intt0edt)
+ Ψ(q k k) + Vq q q P
= minusΦΨT(q q qk qk)xP
V =
i = minus(b1 + b2e + b3 e
+ b4intt
0edt)sgn(xi)
[1 n ]T
Figure 2 Framework of control law with known upper bound of the disturbances
Substituting (16) and (17) into (15) yields
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) +
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909
+ 119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896) + 119909
119879
(119881 minus 119906)
(18)
With property (B2) one obtains
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909 =
1
2
119909119879
[ (119902) minus 2119862 (119902 119902)] 119909 = 0
(19)
Note that
119909119879
Ψ (119902 119902 119902119896 119902119896) =
119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909
=
(20)
and one gets
119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896)
= 119879
Φminus1
[minusΦΨ119879
(119902 119902 119902119896 119902119896) 119909]
+ 119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909 = 0
(21)
Thus one obtains
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) + 119909119879
(119881 minus 119906)
(22)
Note that the following equalities and inequalities hold
119890119879
119870119863119890 =
119899
sum
119894=1
119896119863119894
1198902
119894 120574119890
119879
119870119875119890 =
119899
sum
119894=1
1205741198961198751198941198902
119894
(int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905) =
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) =
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
le
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
(23)
Hence one gets
= minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905) + 119909
119879
(119881 minus 119906)
le minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
6 Mathematical Problems in Engineering
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
(24)
Now considering the term of 119909119879(119881 minus 119906)
119909119879
119881 =
119899
sum
119894=1
119909119894[minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894)]
=
119899
sum
119894=1
[minus(1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
)1003816100381610038161003816119909119894
1003816100381610038161003816]
le
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816)
(25)
here the assumption (C2) has been usedNote that
minus119909119879
119906 le
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906 (26)
Defining 119909119879 = sum119899
119894=1|119909119894| gives
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816) +
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
(27)
With 119896119863119894= 119896119868119894gt 0 and 119896
119875119894gt 0 one obtains
119896119863119894minus
1
2
(119896119863119894+ 119896119868119894) = 0 120574119896
119875119894gt 0
119896119868119894minus
1
2
(119896119863119894+ 119896119868119894) = 0
(28)
Finally one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894 (29)
From the proof and analysis above we know that thefunction is negative and vanishes if and only if 119890(119905) = 0thus the position tracking error goes to zero as time goes toinfinity namely lim
119905rarrinfin119890(119905) = 0
According to the assumption (C3) we obtain that 119890(119905)
119877+
rarr 119877 is uniformly continuous [28] Consider the follow-ing formula holds
lim119905rarrinfin
int
119905
0
119890 (120591) 119889120591 = lim119905rarrinfin
[119890 (119905) minus 119890 (0)] = lim119905rarrinfin
119890 (119905) minus 119890 (0)
= minus119890 (0) lt infin
(30)
which implies that the limit lim119905rarrinfin
int
119905
0
119890(120591)119889120591 is existent andboundedTherefore it follows from the Barbalatrsquos lemma [29]that 119890(119905) rarr 0 as 119905 rarr infin that is lim
119905rarrinfin119890(119905) = 0
Hence the designed controller can guarantee the equilib-rium (119890 119890) = (0 0) globally asymptotically stable It is alsoseen that the parameter vector is bounded but does notnecessarily converge to zero
32 Robust Adaptive PID Controller Design with UnknownUpper Bound of the External Disturbances On the otherhand if the upper bound of the external disturbances signals119906 is unknown inspired by [1 26] the controllerwhich ensuresthe global asymptotical stability of the manipulator positionsand velocities can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(31)
119881 = minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 119909 (32)
119887 = 1205821120585 119909
119887 (0) = 0 (33)
120576 = minus1205822120576 120576 (0) = 0 (34)
where 119887 = 1198871+ 1198872+ 1198873+ 1198874 119887 = 119887 minus
119887 119887 is the estimate
value of 119887 120585 = max(1 119890 119890 int
119905
0
119890119889119905) 1205821and 120582
2are the
arbitrary positive constants and other parameters are definedas Section 31
The framework of the proposed control scheme is shownin Figure 3
Proof Consider the following Lyapunov function
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)
+ 119879
Φminus1
+ (120582minus1
1
1198872
+ 120582minus1
21205762
) ]
(35)
Based on the controller stability analysis with knownupper bound of the external disturbances in Section 31according to (24) one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879
119881 minus 119909119879
119906 + 120582minus1
1
119887119887 + 120582minus1
2120576 120576 (36)
Mathematical Problems in Engineering 7
Manipulatorq
1
S
qd120591 = minusKPe minus KD minus KIe (intt
0edt)
+ Ψ(q k k) + Vq q q P
V = minus( 120585)2
( 120585)x+ 1205762
= 1205821120585xˆ b
b
b
(0) = 0
= minus1205822120576
120576
b
120576(0) 0
= minusΦΨT(q q qk qk)xP
middotx
ne
Figure 3 Framework of control law with unknown upper bound of the disturbances
Substituting (32) and (34) into (36) yields
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879[
[
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
]
]
119909 minus 119909119879
119906 + 120582minus1
1
119887119887 minus 1205762
(37)Take into account that the following equalities and
inequalities hold
119909119879
119909 = 1199092
minus119909119879
119906 le 119909 sdot 119906
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
le 119887120585
119887 = minus
119887 = minus120582
1120585 119909
(38)
here the assumption (C2) and (33) have been usedTherefore one obtains
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 1199092
+ 119909 sdot (119887120585) minus119887120585 119909 minus 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
+
minus(119887120585)
2
1199092
+ (119887120585)
2
1199092
+ 1205762
120585 119909119887 minus 1205762
(119887120585)119909 minus 120576
4
(119887120585) 119909 + 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
1205764
(119887120585) 119909 + 120576
2
(39)From the definitions of (33) and (34) it can be easily
verified that 119887 gt 0 and 1205762
gt 0 as 119905 gt 0 and 120576 rarr 0 as119905 rarr infin Thus the condition lt 0 is satisfied According tothe Lyapunov stability theory andBarbalatrsquos lemma (see (30))
the convergence of 119890 and 119890 to zero is guaranteed and also theboundedness of the parameter vector is obtained
4 Simulation Experiments and Discussion
In order to illustrate the performance of the proposed robustadaptive PID controllers simulation results are given bymeans of MATLABSIMULINK A comparison between theadaptive PD controllers in [25 26] and the robust adaptivePID controllers derived in this study is carried out Thesimulation model is a two-degree-of-freedom planar rigidmanipulator with rotary joints According to (1) its dynamicequation can be described as follows [30]
[
11987211(1199022) 11987212(1199022)
11987212(1199022) 11987222(1199022)
] [
1199021
1199022
]
+ [
minus11986212(1199022) 1199022minus11986212(1199022) ( 1199021+ 1199022)
11986212(1199022) 1199021
0
]
sdot [
1199021
1199022
] + [
1198661(1199021 1199022) 119892
1198662(1199021 1199022) 119892
] = [
1205911
1205912
]
(40)
where
11987211(1199022) = (119898
1+ 1198982) 1199032
1+ 11989821199032
2+ 2119898211990311199032cos 1199022
11987212(1199022) = 119898
21199032
2+ 119898211990311199032cos 1199022
11987222(1199022) = 119898
21199032
2
11986212(1199022) = 119898
211990311199032sin 1199022
1198661(1199021 1199022) = (119898
1+ 1198982) 1199031cos 1199022+ 11989821199032cos (119902
1+ 1199022)
1198662(1199021 1199022) = 119898
21199032cos (119902
1+ 1199022)
(41)
At first linearize (40) and give the parameter matrices Ψand 119875
8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Manipulatorq
1
S
qd
120591 = minusKPe minus KD minus KIe (intt0edt)
+ Ψ(q k k) + Vq q q P
= minusΦΨT(q q qk qk)xP
V =
i = minus(b1 + b2e + b3 e
+ b4intt
0edt)sgn(xi)
[1 n ]T
Figure 2 Framework of control law with known upper bound of the disturbances
Substituting (16) and (17) into (15) yields
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) +
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909
+ 119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896) + 119909
119879
(119881 minus 119906)
(18)
With property (B2) one obtains
1
2
119909119879
(119902) 119909 minus 119909119879
119862 (119902 119902) 119909 =
1
2
119909119879
[ (119902) minus 2119862 (119902 119902)] 119909 = 0
(19)
Note that
119909119879
Ψ (119902 119902 119902119896 119902119896) =
119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909
=
(20)
and one gets
119879
Φminus1 + 119909119879
Ψ (119902 119902 119902119896 119902119896)
= 119879
Φminus1
[minusΦΨ119879
(119902 119902 119902119896 119902119896) 119909]
+ 119879
Ψ119879
(119902 119902 119902119896 119902119896) 119909 = 0
(21)
Thus one obtains
= minus 119890119879
119870119863119890 minus 120574119890119879
119870119875119890 minus (int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905)
minus 119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) + 119909119879
(119881 minus 119906)
(22)
Note that the following equalities and inequalities hold
119890119879
119870119863119890 =
119899
sum
119894=1
119896119863119894
1198902
119894 120574119890
119879
119870119875119890 =
119899
sum
119894=1
1205741198961198751198941198902
119894
(int
119905
0
119890119889119905)
119879
119870119868(int
119905
0
119890119889119905) =
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
119890119879
(119870119863+ 119870119868) (int
119905
0
119890119889119905) =
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905)
le
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
(23)
Hence one gets
= minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
minus
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 119890119894(int
119905
0
119890119894119889119905) + 119909
119879
(119881 minus 119906)
le minus
119899
sum
119894=1
119896119863119894
1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
119899
sum
119894=1
119896119868119894(int
119905
0
119890119894119889119905)
2
+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) 1198902
119894+
1
2
119899
sum
119894=1
(119896119863119894+ 119896119868119894) (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
6 Mathematical Problems in Engineering
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
(24)
Now considering the term of 119909119879(119881 minus 119906)
119909119879
119881 =
119899
sum
119894=1
119909119894[minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894)]
=
119899
sum
119894=1
[minus(1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
)1003816100381610038161003816119909119894
1003816100381610038161003816]
le
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816)
(25)
here the assumption (C2) has been usedNote that
minus119909119879
119906 le
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906 (26)
Defining 119909119879 = sum119899
119894=1|119909119894| gives
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816) +
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
(27)
With 119896119863119894= 119896119868119894gt 0 and 119896
119875119894gt 0 one obtains
119896119863119894minus
1
2
(119896119863119894+ 119896119868119894) = 0 120574119896
119875119894gt 0
119896119868119894minus
1
2
(119896119863119894+ 119896119868119894) = 0
(28)
Finally one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894 (29)
From the proof and analysis above we know that thefunction is negative and vanishes if and only if 119890(119905) = 0thus the position tracking error goes to zero as time goes toinfinity namely lim
119905rarrinfin119890(119905) = 0
According to the assumption (C3) we obtain that 119890(119905)
119877+
rarr 119877 is uniformly continuous [28] Consider the follow-ing formula holds
lim119905rarrinfin
int
119905
0
119890 (120591) 119889120591 = lim119905rarrinfin
[119890 (119905) minus 119890 (0)] = lim119905rarrinfin
119890 (119905) minus 119890 (0)
= minus119890 (0) lt infin
(30)
which implies that the limit lim119905rarrinfin
int
119905
0
119890(120591)119889120591 is existent andboundedTherefore it follows from the Barbalatrsquos lemma [29]that 119890(119905) rarr 0 as 119905 rarr infin that is lim
119905rarrinfin119890(119905) = 0
Hence the designed controller can guarantee the equilib-rium (119890 119890) = (0 0) globally asymptotically stable It is alsoseen that the parameter vector is bounded but does notnecessarily converge to zero
32 Robust Adaptive PID Controller Design with UnknownUpper Bound of the External Disturbances On the otherhand if the upper bound of the external disturbances signals119906 is unknown inspired by [1 26] the controllerwhich ensuresthe global asymptotical stability of the manipulator positionsand velocities can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(31)
119881 = minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 119909 (32)
119887 = 1205821120585 119909
119887 (0) = 0 (33)
120576 = minus1205822120576 120576 (0) = 0 (34)
where 119887 = 1198871+ 1198872+ 1198873+ 1198874 119887 = 119887 minus
119887 119887 is the estimate
value of 119887 120585 = max(1 119890 119890 int
119905
0
119890119889119905) 1205821and 120582
2are the
arbitrary positive constants and other parameters are definedas Section 31
The framework of the proposed control scheme is shownin Figure 3
Proof Consider the following Lyapunov function
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)
+ 119879
Φminus1
+ (120582minus1
1
1198872
+ 120582minus1
21205762
) ]
(35)
Based on the controller stability analysis with knownupper bound of the external disturbances in Section 31according to (24) one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879
119881 minus 119909119879
119906 + 120582minus1
1
119887119887 + 120582minus1
2120576 120576 (36)
Mathematical Problems in Engineering 7
Manipulatorq
1
S
qd120591 = minusKPe minus KD minus KIe (intt
0edt)
+ Ψ(q k k) + Vq q q P
V = minus( 120585)2
( 120585)x+ 1205762
= 1205821120585xˆ b
b
b
(0) = 0
= minus1205822120576
120576
b
120576(0) 0
= minusΦΨT(q q qk qk)xP
middotx
ne
Figure 3 Framework of control law with unknown upper bound of the disturbances
Substituting (32) and (34) into (36) yields
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879[
[
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
]
]
119909 minus 119909119879
119906 + 120582minus1
1
119887119887 minus 1205762
(37)Take into account that the following equalities and
inequalities hold
119909119879
119909 = 1199092
minus119909119879
119906 le 119909 sdot 119906
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
le 119887120585
119887 = minus
119887 = minus120582
1120585 119909
(38)
here the assumption (C2) and (33) have been usedTherefore one obtains
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 1199092
+ 119909 sdot (119887120585) minus119887120585 119909 minus 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
+
minus(119887120585)
2
1199092
+ (119887120585)
2
1199092
+ 1205762
120585 119909119887 minus 1205762
(119887120585)119909 minus 120576
4
(119887120585) 119909 + 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
1205764
(119887120585) 119909 + 120576
2
(39)From the definitions of (33) and (34) it can be easily
verified that 119887 gt 0 and 1205762
gt 0 as 119905 gt 0 and 120576 rarr 0 as119905 rarr infin Thus the condition lt 0 is satisfied According tothe Lyapunov stability theory andBarbalatrsquos lemma (see (30))
the convergence of 119890 and 119890 to zero is guaranteed and also theboundedness of the parameter vector is obtained
4 Simulation Experiments and Discussion
In order to illustrate the performance of the proposed robustadaptive PID controllers simulation results are given bymeans of MATLABSIMULINK A comparison between theadaptive PD controllers in [25 26] and the robust adaptivePID controllers derived in this study is carried out Thesimulation model is a two-degree-of-freedom planar rigidmanipulator with rotary joints According to (1) its dynamicequation can be described as follows [30]
[
11987211(1199022) 11987212(1199022)
11987212(1199022) 11987222(1199022)
] [
1199021
1199022
]
+ [
minus11986212(1199022) 1199022minus11986212(1199022) ( 1199021+ 1199022)
11986212(1199022) 1199021
0
]
sdot [
1199021
1199022
] + [
1198661(1199021 1199022) 119892
1198662(1199021 1199022) 119892
] = [
1205911
1205912
]
(40)
where
11987211(1199022) = (119898
1+ 1198982) 1199032
1+ 11989821199032
2+ 2119898211990311199032cos 1199022
11987212(1199022) = 119898
21199032
2+ 119898211990311199032cos 1199022
11987222(1199022) = 119898
21199032
2
11986212(1199022) = 119898
211990311199032sin 1199022
1198661(1199021 1199022) = (119898
1+ 1198982) 1199031cos 1199022+ 11989821199032cos (119902
1+ 1199022)
1198662(1199021 1199022) = 119898
21199032cos (119902
1+ 1199022)
(41)
At first linearize (40) and give the parameter matrices Ψand 119875
8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+ 119909119879
(119881 minus 119906)
(24)
Now considering the term of 119909119879(119881 minus 119906)
119909119879
119881 =
119899
sum
119894=1
119909119894[minus(119887
1+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
) sgn (119909119894)]
=
119899
sum
119894=1
[minus(1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
)1003816100381610038161003816119909119894
1003816100381610038161003816]
le
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816)
(25)
here the assumption (C2) has been usedNote that
minus119909119879
119906 le
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906 (26)
Defining 119909119879 = sum119899
119894=1|119909119894| gives
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
+
119899
sum
119894=1
(minus 119906 sdot1003816100381610038161003816119909119894
1003816100381610038161003816) +
1003817100381710038171003817100381711990911987910038171003817100381710038171003817sdot 119906
le minus
119899
sum
119894=1
[119896119863119894minus
1
2
(119896119863119894+ 119896119868119894)] 1198902
119894minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
119899
sum
119894=1
[119896119868119894minus
1
2
(119896119863119894+ 119896119868119894)] (int
119905
0
119890119894119889119905)
2
(27)
With 119896119863119894= 119896119868119894gt 0 and 119896
119875119894gt 0 one obtains
119896119863119894minus
1
2
(119896119863119894+ 119896119868119894) = 0 120574119896
119875119894gt 0
119896119868119894minus
1
2
(119896119863119894+ 119896119868119894) = 0
(28)
Finally one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894 (29)
From the proof and analysis above we know that thefunction is negative and vanishes if and only if 119890(119905) = 0thus the position tracking error goes to zero as time goes toinfinity namely lim
119905rarrinfin119890(119905) = 0
According to the assumption (C3) we obtain that 119890(119905)
119877+
rarr 119877 is uniformly continuous [28] Consider the follow-ing formula holds
lim119905rarrinfin
int
119905
0
119890 (120591) 119889120591 = lim119905rarrinfin
[119890 (119905) minus 119890 (0)] = lim119905rarrinfin
119890 (119905) minus 119890 (0)
= minus119890 (0) lt infin
(30)
which implies that the limit lim119905rarrinfin
int
119905
0
119890(120591)119889120591 is existent andboundedTherefore it follows from the Barbalatrsquos lemma [29]that 119890(119905) rarr 0 as 119905 rarr infin that is lim
119905rarrinfin119890(119905) = 0
Hence the designed controller can guarantee the equilib-rium (119890 119890) = (0 0) globally asymptotically stable It is alsoseen that the parameter vector is bounded but does notnecessarily converge to zero
32 Robust Adaptive PID Controller Design with UnknownUpper Bound of the External Disturbances On the otherhand if the upper bound of the external disturbances signals119906 is unknown inspired by [1 26] the controllerwhich ensuresthe global asymptotical stability of the manipulator positionsand velocities can be designed as follows
120591 = minus119870119875119890 minus 119870119863119890 minus 119870119868(int
119905
0
119890119889119905) + Ψ (119902 119902 119902119896 119902119896) + 119881
(31)
119881 = minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 119909 (32)
119887 = 1205821120585 119909
119887 (0) = 0 (33)
120576 = minus1205822120576 120576 (0) = 0 (34)
where 119887 = 1198871+ 1198872+ 1198873+ 1198874 119887 = 119887 minus
119887 119887 is the estimate
value of 119887 120585 = max(1 119890 119890 int
119905
0
119890119889119905) 1205821and 120582
2are the
arbitrary positive constants and other parameters are definedas Section 31
The framework of the proposed control scheme is shownin Figure 3
Proof Consider the following Lyapunov function
119881 =
1
2
[119909119879
119872(119902) 119909 + 119890119879
(119870119875+ 120574119870119863) 119890
+ (int
119905
0
119890119889119905)
119879
(119870119875+ 120574119870119868) (int
119905
0
119890119889119905)
+ 119879
Φminus1
+ (120582minus1
1
1198872
+ 120582minus1
21205762
) ]
(35)
Based on the controller stability analysis with knownupper bound of the external disturbances in Section 31according to (24) one gets
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879
119881 minus 119909119879
119906 + 120582minus1
1
119887119887 + 120582minus1
2120576 120576 (36)
Mathematical Problems in Engineering 7
Manipulatorq
1
S
qd120591 = minusKPe minus KD minus KIe (intt
0edt)
+ Ψ(q k k) + Vq q q P
V = minus( 120585)2
( 120585)x+ 1205762
= 1205821120585xˆ b
b
b
(0) = 0
= minus1205822120576
120576
b
120576(0) 0
= minusΦΨT(q q qk qk)xP
middotx
ne
Figure 3 Framework of control law with unknown upper bound of the disturbances
Substituting (32) and (34) into (36) yields
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879[
[
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
]
]
119909 minus 119909119879
119906 + 120582minus1
1
119887119887 minus 1205762
(37)Take into account that the following equalities and
inequalities hold
119909119879
119909 = 1199092
minus119909119879
119906 le 119909 sdot 119906
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
le 119887120585
119887 = minus
119887 = minus120582
1120585 119909
(38)
here the assumption (C2) and (33) have been usedTherefore one obtains
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 1199092
+ 119909 sdot (119887120585) minus119887120585 119909 minus 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
+
minus(119887120585)
2
1199092
+ (119887120585)
2
1199092
+ 1205762
120585 119909119887 minus 1205762
(119887120585)119909 minus 120576
4
(119887120585) 119909 + 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
1205764
(119887120585) 119909 + 120576
2
(39)From the definitions of (33) and (34) it can be easily
verified that 119887 gt 0 and 1205762
gt 0 as 119905 gt 0 and 120576 rarr 0 as119905 rarr infin Thus the condition lt 0 is satisfied According tothe Lyapunov stability theory andBarbalatrsquos lemma (see (30))
the convergence of 119890 and 119890 to zero is guaranteed and also theboundedness of the parameter vector is obtained
4 Simulation Experiments and Discussion
In order to illustrate the performance of the proposed robustadaptive PID controllers simulation results are given bymeans of MATLABSIMULINK A comparison between theadaptive PD controllers in [25 26] and the robust adaptivePID controllers derived in this study is carried out Thesimulation model is a two-degree-of-freedom planar rigidmanipulator with rotary joints According to (1) its dynamicequation can be described as follows [30]
[
11987211(1199022) 11987212(1199022)
11987212(1199022) 11987222(1199022)
] [
1199021
1199022
]
+ [
minus11986212(1199022) 1199022minus11986212(1199022) ( 1199021+ 1199022)
11986212(1199022) 1199021
0
]
sdot [
1199021
1199022
] + [
1198661(1199021 1199022) 119892
1198662(1199021 1199022) 119892
] = [
1205911
1205912
]
(40)
where
11987211(1199022) = (119898
1+ 1198982) 1199032
1+ 11989821199032
2+ 2119898211990311199032cos 1199022
11987212(1199022) = 119898
21199032
2+ 119898211990311199032cos 1199022
11987222(1199022) = 119898
21199032
2
11986212(1199022) = 119898
211990311199032sin 1199022
1198661(1199021 1199022) = (119898
1+ 1198982) 1199031cos 1199022+ 11989821199032cos (119902
1+ 1199022)
1198662(1199021 1199022) = 119898
21199032cos (119902
1+ 1199022)
(41)
At first linearize (40) and give the parameter matrices Ψand 119875
8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Manipulatorq
1
S
qd120591 = minusKPe minus KD minus KIe (intt
0edt)
+ Ψ(q k k) + Vq q q P
V = minus( 120585)2
( 120585)x+ 1205762
= 1205821120585xˆ b
b
b
(0) = 0
= minus1205822120576
120576
b
120576(0) 0
= minusΦΨT(q q qk qk)xP
middotx
ne
Figure 3 Framework of control law with unknown upper bound of the disturbances
Substituting (32) and (34) into (36) yields
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894+ 119909119879[
[
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
]
]
119909 minus 119909119879
119906 + 120582minus1
1
119887119887 minus 1205762
(37)Take into account that the following equalities and
inequalities hold
119909119879
119909 = 1199092
minus119909119879
119906 le 119909 sdot 119906
119906 le 1198871+ 1198872119890 + 119887
3 119890 + 119887
4
10038171003817100381710038171003817100381710038171003817
int
119905
0
119890119889119905
10038171003817100381710038171003817100381710038171003817
le 119887120585
119887 = minus
119887 = minus120582
1120585 119909
(38)
here the assumption (C2) and (33) have been usedTherefore one obtains
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
minus
(119887120585)
2
(119887120585) 119909 + 120576
2
sdot 1199092
+ 119909 sdot (119887120585) minus119887120585 119909 minus 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894
+
minus(119887120585)
2
1199092
+ (119887120585)
2
1199092
+ 1205762
120585 119909119887 minus 1205762
(119887120585)119909 minus 120576
4
(119887120585) 119909 + 120576
2
le minus
119899
sum
119894=1
1205741198961198751198941198902
119894minus
1205764
(119887120585) 119909 + 120576
2
(39)From the definitions of (33) and (34) it can be easily
verified that 119887 gt 0 and 1205762
gt 0 as 119905 gt 0 and 120576 rarr 0 as119905 rarr infin Thus the condition lt 0 is satisfied According tothe Lyapunov stability theory andBarbalatrsquos lemma (see (30))
the convergence of 119890 and 119890 to zero is guaranteed and also theboundedness of the parameter vector is obtained
4 Simulation Experiments and Discussion
In order to illustrate the performance of the proposed robustadaptive PID controllers simulation results are given bymeans of MATLABSIMULINK A comparison between theadaptive PD controllers in [25 26] and the robust adaptivePID controllers derived in this study is carried out Thesimulation model is a two-degree-of-freedom planar rigidmanipulator with rotary joints According to (1) its dynamicequation can be described as follows [30]
[
11987211(1199022) 11987212(1199022)
11987212(1199022) 11987222(1199022)
] [
1199021
1199022
]
+ [
minus11986212(1199022) 1199022minus11986212(1199022) ( 1199021+ 1199022)
11986212(1199022) 1199021
0
]
sdot [
1199021
1199022
] + [
1198661(1199021 1199022) 119892
1198662(1199021 1199022) 119892
] = [
1205911
1205912
]
(40)
where
11987211(1199022) = (119898
1+ 1198982) 1199032
1+ 11989821199032
2+ 2119898211990311199032cos 1199022
11987212(1199022) = 119898
21199032
2+ 119898211990311199032cos 1199022
11987222(1199022) = 119898
21199032
2
11986212(1199022) = 119898
211990311199032sin 1199022
1198661(1199021 1199022) = (119898
1+ 1198982) 1199031cos 1199022+ 11989821199032cos (119902
1+ 1199022)
1198662(1199021 1199022) = 119898
21199032cos (119902
1+ 1199022)
(41)
At first linearize (40) and give the parameter matrices Ψand 119875
8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
According to (5) the following equality holds
119872(119902) 119902119896+ 119862 (119902 119902) 119902
119896+ 119866 (119902) = Ψ (119902 119902 119902
119896 119902119896) 119875 (42)
Let the matrices Ψ and 119875 have the following forms
Ψ = [
12059511
12059512
12059513
12059521
12059522
12059523
] 119875 = [119901111990121199013]
119879
(43)
Then the parameters can be derived as below
12059511= 1199021119896+ (
119892
1199031
) cos 1199022 120595
12= 1199021119896+ 1199022119896
12059513= 2 1199021119896cos 1199022+ 1199022119896cos 1199022minus 11990221199021119896sin 1199022
minus ( 1199021+ 1199022) 1199022119896sin 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
12059521= 0 120595
22= 12059512
12059523= 11990211199021119896sin 1199022+ 1199021119896cos 1199022+ (
119892
1199031
) cos (1199021+ 1199022)
1199011= (1198981+ 1198982) 1199032
1 119901
2= 11989821199032
2 119901
3= 119898211990311199032
(44)
The link parameters of robot manipulator are given by1199031= 1m 119903
2= 08m119898
1= 05 kg and119898
2= 05 kgThe upper
bound parameters are selected as 1198871= 2 119887
2= 3 119887
3= 6 and
1198874= 1 The disturbances vector is chosen as 119906 = [10 10]
119879
+
2119890 + 5 119890 The reference trajectories are 1199021119889
= cos(120587119905) and1199022119889= cos(120587119905)The initial values of manipulator positions and
velocities are selected as [1199021
11990211199022
1199022]119879
= [06 0 03 0]119879
Take the gain coefficients of the robust adaptive PIDcontrol as
119870119875= diag [1000 400] 119870
119863= diag [180 150]
119870119868= 119870119863 120574 = 5 Φ = diag [50 50 50]
(45)
The adaptive PD control gains119870119875and119870
119863are determined
by [25 26]The MATLABSIMULINK framework is shown in
Figure 4In order to show the advantage of the proposed control
laws two simulations are conducted one with adaptive PDcontrol and the other with robust adaptive PID control Thesimulation results are presented in Figures 5ndash16
41 Simulation Results with Known Upper Bound of theExternalDisturbances Adopting the control lawdescribed inSection 31 to simulate the tracking effects of robot manipu-lator the simulation results can be seen from Figures 5 6 78 9 and 10
42 Simulation Results with Unknown Upper Bound of theExternal Disturbances Choosing 120582
1= 1205822= 40 and utilizing
the control scheme represented in Section 32 to expressthe tracking capability of robot manipulator the simulationresults are shown in Figures 11 12 13 14 15 and 16
5 Discussion
These figures indicate that the robust adaptive PID controlschemes can compensate the unknown bounded externaldisturbances and guarantee the manipulator systems to trackthe desired position and velocity trajectories accurately withquite small tracking errors in finite time The adaptive algo-rithm can effectively estimate the unknown constant vector119875which describes the mass characteristics of robot manipula-tor
In comparisonwith the adaptive PD controllers proposedin [25 26] the robust adaptive PID controllers can providebetter control performance The main reason lies in theincorporation of an integral action within both PD controland robust adaptive algorithm based on the adaptive PDcontrol laws [25 26] Concerning the PID control term in therobust adaptive PID controllers it exhibits the superiority incontrast to the PD one in the adaptive PD controllers [25 26]In the case of PD control the differential element only playsa part in dynamic process and it has no effect on steady-state process although the steady-state errors can be smallerby increasing the proportional gain matrix yet too largeproportional gain may cause the system to be unstable Inaddition from a practical point of view the pure differentialelement cannot be realized in practice furthermore thedifferential action is very sensitive to system noise as a resultany disturbances in each systemrsquos element would result inbig fluctuation in systems output Hence the adoption of PDcontrol is indeed of no benefit for the improvement of systemdynamic performance While the PID control includes anintegral element which can raise the indiscrimination degreeof the system so it can enhance the stead-state performanceof the closed-loop system Apart from that the PID controlcan also provide one negative real zero which contributesto improve the dynamic performance of robot manipulatorsystems In terms of the adaptation algorithm in this workdifferent from the one in [25 26] an integral element actson the estimation law
via the variable 119909 (see (3) and (10))In this case note that continuously accumulated positionerrors under the action of integration element result in abigger value of
than that in [25 26] which implies thatthe estimated rate of the estimate vector is increased As aconsequence the dynamic performance and the finite-timeestimation accuracy of the estimate vector are improvedwith comparison to those in [25 26] In addition to thesenote that assumption (C2) provides a bigger upper boundof the external disturbances than the one which is definedas 119906 le 119887
1+ 1198872119890 + 119887
3 119890 in [25 26] Because when the
two upper bound inequalities of the external disturbancessignals 119906 in [25 26] and this study hold the same parametervalues of 119887
1 1198872 and 119887
3 an arbitrary positive constant 119887
4
together with the nonzero accumulated position errors inassumption (C2) can lead to a bigger upper bound value forthe external disturbances signals 119906 However the enlargedexternal disturbances can be compensated by the enhancedrobust term 119881 (see (3) (9) (32) and (33)) Therefore greaterexternal disturbances are allowed for this study than the onestolerated in [25 26]Hence the proposed robust adaptive PID
Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
To workspace4 To workspace3To workspace2
To workspace1
To workspace
0
Clock1
q qd
Manipulator input
S-function1
Tol
Manipulator ctrl
S-function4
S-function2
S-function3
Manipulator plant
t
Manipulator adapt p
Figure 4 The MATLABSIMULINK framework
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
minus2
minus1
0
1
2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
minus4
minus2
0
2
4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 5 Position and velocity trajectory tracking of link 1
control laws could show their advantages with appropriatecontrol gains in contrast to the adaptive PD ones [25 26]
However it should emphasize that the proposed robustadaptive PID controllers can only enhance the finite-timetracking accuracy in contrast to the existing adaptive PDones [25 26] because the global asymptotical stability with
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Velo
city
erro
r of
link
1 (r
ads
)
Tracking error of adaptive PDTracking error of adaptive PID
3
2
1
0
minus1
(b)
Figure 6 Position and velocity trajectory tracking errors of link 1
respect to the manipulator positions and velocities can alsobe achieved by using the adaptive PD control laws [25 26]which implies that 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin can beguaranteed Nevertheless the dynamic performance of theclosed-loop system can be improved in the whole processby adopting the robust adaptive PID control laws In factthe control procedure is always the finite-time process in
10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 7 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 8 Position and velocity trajectory tracking errors of link 2
practical control systems hence the study of the finite-timecontrol performance improvement of robot manipulator inthis work is of practical significance
Simulation results verify the advantages of the proposedcontrol schemes The experimental curves show that therobust adaptive PID controllers provide higher accuracy infinite-time position and velocity tracking control than those
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 9 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 10 Control inputs of link 1 and link 2
provided by the adaptive PD ones [25 26] Moreover therobust adaptive PID controllers result in better dynamicperformance of the manipulator systems By observing theexperimental figures it can be verified that the proposedcontrol laws can ensure a faster convergence rate and smaller
Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
1 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Velo
city
trac
king
of
link
1 (r
ads
)
4
2
0
minus2
minus4
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
(b)
Figure 11 Position and velocity trajectory tracking of link 1
0 1 2 3 4 5Time (s)
Pos
ition
erro
r of
link
1 (r
ad)
06
04
02
0
minus02
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
1 (r
ads
)
3
2
1
0
minus1
(b)
Figure 12 Position and velocity trajectory tracking errors of link 1
overshoot of the system states tracking to the desired tra-jectories when compared with the adaptive PD controllers[25 26] In terms of the control input the robust adaptive PIDcontrollers lead to less chattering effect which is beneficialto prolong the service life of robot manipulator For theunknown constant vector 119875 the designed controllers in
0 1 2 3 4 5Time (s)
Posit
ion
trac
king
of
link
2 (r
ad)
2
1
0
minus1
minus2
(a)
0 1 2 3 4 5Time (s)
Desired trajectoryActual trajectory of adaptive PDActual trajectory of adaptive PID
Velo
city
trac
king
of
link
2 (r
ads
)
4
2
0
minus2
minus4
(b)
Figure 13 Position and velocity trajectory tracking of link 2
0 1 2 3 4 5Time (s)
Posit
ion
erro
r of
link
2 (r
ad)
1
05
0
minus05
(a)
0 1 2 3 4 5Time (s)
Tracking error of adaptive PDTracking error of adaptive PID
Velo
city
erro
r of
link
2 (r
ads
)
3
2
1
0
minus1
(b)
Figure 14 Position and velocity trajectory tracking errors of link 2
this study ensure higher finite-time estimation accuracy andsignificantly lower overshoot
From the above analysis the investigation of this workpresents more effective control methods for robot manip-ulator operation under unknown bounded external distur-bances
12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
0 1 2 3 4 5Time (s)
10
0
minus10p1
estim
ate
(kglowast
m2)
(a)
0 1 2 3 4 5Time (s)
10
0
minus10p2
estim
ate
(kglowast
m2)
(b)
0 1 2 3 4 5Time (s)
10
0
minus10
Estimate value of adaptive PDEstimate value of adaptive PIDActual value of parameters p
p3
estim
ate
(kglowast
m2)
(c)
Figure 15 Estimate values of parameters 1199011 1199012 and 119901
3
0 1 2 3 4 5Time (s)
600
400
200
0
minus200Con
trol i
nput
of l
ink
1(N
lowastm
)
(a)
0 1 2 3 4 5Time (s)
Control input of adaptive PDControl input of adaptive PID
300
200
100
0
minus100Con
trol i
nput
of l
ink
2(N
lowastm
)
(b)
Figure 16 Control inputs of link 1 and link 2
Remark Both the adaptive PD control laws in [25 26]and the robust adaptive PID control laws in this study canmake the position and the velocity tracking errors of themanipulator systems asymptotically converge to zero whichmeans 119890(119905) rarr 0 and 119890(119905) rarr 0 as 119905 rarr infin Therefore whenthe control gains chosen for simulation in [25 26] and this
paper simultaneously result in rapid convergence of themanipulator positions and velocities the advantage of therobust adaptive PID controllers will be tiny with comparisonto the adaptive PD controllers [25 26]
Nevertheless it is necessary to emphasize that the pro-posed controllers are unavailable under manipulator actua-tors fault However actuators fault may occur due to infre-quent maintenance or limited life cycle which could causeseveral damages to the operators and products In [31]an adaptive variable structure control scheme is proposedfor underactuated mechanical manipulators Reference [32]investigates the basic data-driven methods for process mon-itoring and fault diagnosis And [33] discusses two onlineschemes for an integrated design of fault-tolerant controlsystems Based on these current researches our future workwill focus on the fault diagnosis and fault-tolerant control ofrobot manipulators in case of actuators fault
6 Conclusion
This paper describes the design and simulation implementa-tion of two new robust adaptive PID controllers for the trajec-tory tracking control of rigid robot manipulator with knownor unknown upper bound of the external disturbances Themain feature of this design is that it combines PID controllaw with robust adaptive algorithm The adaptive algorithmis utilized to estimate the unknown constant vector 119875 onlinewhile the robust term and the PID control are used to copewith the unknown bounded external disturbances adaptiveapproximation errors and trajectory tracking errors
The convergence and stability properties of the closed-loop system are guaranteed In addition the tolerable externaldisturbances are enlarged besides the dynamic performanceof the manipulator systems is improved and the finite-timetracking control accuracy is enhanced by adopting the pro-posed control schemes in contrast to those achieved throughapplying the existing adaptive PD control laws [25 26] Thecontrol techniques have been finally simulated for a plannermanipulator model with two rotary degrees of freedom inMATLABSIMULINK toolbox Simulation results show theadvantages of the designed controllers and verify that theproposed strategies are able to cope with both the externaldisturbances that can typically arise in practical control anduncertain constant parameters in system dynamics
The limitation of the proposed control schemes lies inthe requirement of 119870
119863= 119870119868 which in fact constrains the
flexibility of the controllers Currently we are working on theextension of the proposedmethods to remove this constraintFuture work will investigate the fault diagnosis and fault-tolerant control of robot manipulator systems with actuatorsfault
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant 51179038 and the Fun-damental Research Funds for the Central Universities ofHEUCF041337
Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
References
[1] R Kelly and R Carelli ldquoA class of nonlinear PD-type controllersfor robot manipulatorsrdquo Journal of Robotic Systems vol 13 no12 pp 793ndash802 1996
[2] S Kawamura F Miyazaki and S Arimoto ldquoIs a local PDfeedback control law effective for trajectory tracking of robotmotionrdquo in Proceedings of the IEEE International Conference onRobotics and Automation vol 3 pp 1335ndash1340 1988
[3] S Arimoto and F Miyazaki ldquoStability and robustness of PIDfeedback control for robot manipulators of sensory capabilityrdquoin Proceedings of the 1st International Symposium on RoboticsResearch pp 783ndash799 1984
[4] E M Jafarov M N A Parlakci and Y Istefanopulos ldquoA newvariable structure PID-controller design for robot manipula-torsrdquo IEEE Transactions on Control Systems Technology vol 13no 1 pp 122ndash130 2005
[5] G Leitmann ldquoOn the efficacy of nonlinear control in uncertainlinear systemsrdquo Journal of Dynamic Systems Measurement andControl vol 103 no 2 pp 95ndash102 1981
[6] M J Corless and G Leitmann ldquoContinuous state feedbackguaranteeing uniform ultimate boundedness for uncertaindynamic systemsrdquo Institute of Electrical and Electronics Engi-neers vol 26 no 5 pp 1139ndash1144 1981
[7] M W Spong ldquoOn the robust control of robot manipulatorsrdquoInstitute of Electrical and Electronics Engineers vol 37 no 11 pp1782ndash1786 1992
[8] E Yaz ldquoCommons on ldquoon the robust control of robotmanipula-torsrdquo byMW Spongrdquo IEEE Transactions on Automatic Controlvol 38 no 3 pp 511ndash512 1993
[9] K-M Koo and J-H Kim ldquoRobust control of robot manipu-lators with parametric uncertaintyrdquo Institute of Electrical andElectronics Engineers vol 39 no 6 pp 1230ndash1233 1994
[10] M Danesh M Keshmiri and F Sheikholeslam ldquoDeveloping arobot control scheme robust to uncertainmodel parameters andunmodeled dynamicsrdquo in Proceedings of the 1st IEEE Conferenceon Industrial Electronics and Applications (ICIEA rsquo06) pp 1ndash6May 2006
[11] G Liu and A A Goldenberg ldquoUncertainty decomposition-based robust control of robot manipulatorsrdquo IEEE Transactionson Control Systems Technology vol 4 no 4 pp 384ndash393 1996
[12] J J Craig P Hsu and S S Sastry ldquoAdaptive control ofmechanical manipulatorsrdquo International Journal of RoboticsResearch vol 6 no 2 pp 16ndash28 1987
[13] J-J E Slotine and W Li ldquoOn the adaptive control of robotmanipulatorsrdquo International Journal of Robotics Research vol 6no 3 pp 49ndash59 1987
[14] R Burkan ldquoDesign of an adaptive control law using trigono-metric functions for robot manipulatorsrdquo Robotica vol 23 no1 pp 93ndash99 2005
[15] R Burkan ldquoModelling of a logarithmic parameter adaptationlaw for adaptive control of mechanical manipulatorsrdquo Roboticavol 24 no 4 pp 523ndash525 2006
[16] K Y Lim and M Eslami ldquoRobust adaptive controller designsfor robot manipulator systemsrdquo IEEE Journal of Robotics andAutomation vol 3 no 1 pp 54ndash66 1987
[17] R Johansson ldquoAdaptive control of robot manipulator motionrdquoIEEE Transactions on Robotics and Automation vol 6 no 4 pp483ndash490 1990
[18] Z J Yang Y Fukushima and P Qin ldquoDecentralized adap-tive robust control of robot manipulators using disturbance
observersrdquo IEEE Transactions on Control Systems Technologyvol 20 no 5 pp 1357ndash1365 2012
[19] R Burkan ldquoDesign parameters and uncertainty bound estima-tion functions for adaptive-robust control of robot manipula-torsrdquo Turkish Journal of Electrical Engineering and ComputerSciences vol 20 no 1 pp 169ndash186 2012
[20] R Burkan ldquoDesign of adaptive compensators for the control ofrobotmanipulators robust to unknown structured and unstruc-tured parametersrdquo Turkish Journal of Electrical Engineering ampComputer Sciences vol 21 no 2 pp 452ndash469 2013
[21] F Aghili ldquoAdaptive control of manipulators forming closedkinematic chain with inaccurate kinematic modelrdquo IEEEASMETransactions on Mechatronics vol 8 no 5 pp 1544ndash1554 2013
[22] D J Lopez-Araujo A Zavala-Rıo V Santibanez and F ReyesldquoOutput-feedback adaptive control for the global regulation ofrobot manipulators with bounded inputsrdquo International Journalof Control Automation and Systems vol 11 no 1 pp 105ndash1152013
[23] S I Han K S Lee M G Park and J M Lee ldquoRobust adaptivedeadzone and friction compensation of robot manipulatorusing RWCMAC networkrdquo Journal of Mechanical Science andTechnology vol 25 no 6 pp 1583ndash1594 2011
[24] MM Fateh and S Khorashadizadeh ldquoRobust control of electri-cally driven robots by adaptive fuzzy estimation of uncertaintyrdquoNonlinear Dynamics vol 69 no 3 pp 1465ndash1477 2012
[25] H J Bai D F Tang and J B Cao ldquoA robust adaptive PDcontrol method of robot manipulatorrdquo Journal of MechanicalTransmission vol 35 no 11 pp 34ndash40 2011
[26] D Ge and S Jiang ldquoSelf-adaptive PD control of robot manip-ulatorrdquo in Proceedings of the 8th ACIS International Confer-ence on Software Engineering Artificial Intelligence Networkingand ParallelDistributed Computing (SNPD rsquo07) pp 605ndash610August 2007
[27] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley New York NY USA 1989
[28] J Slotine and W Li Applied Nonlinear Control Prentice HallNew Jersey NJ USA 1991
[29] H K Khalil Nonlinear Systems Prentice Hall Upper SaddleRiver NJ USA 3rd edition 2003
[30] C-Y Su and T-P Leung ldquoSliding mode controller withbound estimation for robot manipulatorsrdquo IEEE Transactionson Robotics and Automation vol 9 no 2 pp 208ndash214 1993
[31] J H Yang and K S Yang ldquoAn adaptive variable structurecontrol scheme for underactuated mechanical manipulatorsrdquoMathematical Problems in Engineering vol 2013 Article ID270649 23 pages 2012
[32] S Yin S X Ding A Haghani H Hao and P zhang ldquoAcomparison study of basic data-driven fault diagnosis andprocess monitoring methods on the benchmark TennesseeEastman processrdquo Journal of Process Control vol 22 no 9 pp1567ndash1581 2012
[33] S Yin H Lou and S X Ding ldquoReal-time implementation offault tolerant control system with performance optimizationrdquoIEEE Transactions on Industrial Electronics vol 61 no 5 pp2402ndash2411 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of



![Workshop] Robust and Adaptive Part 1](https://static.fdocuments.net/doc/165x107/55129b434a7959c4028b4a18/workshop-robust-and-adaptive-part-1.jpg)