Research Article Nonlinear Fuzzy Model Predictive...
11
Research Article Nonlinear Fuzzy Model Predictive Control for a PWR Nuclear Power Plant Xiangjie Liu and Mengyue Wang State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources, North China Electric Power University, Beijing 102206, China Correspondence should be addressed to Xiangjie Liu; [email protected] Received 22 March 2014; Accepted 7 May 2014; Published 2 June 2014 Academic Editor: Chengjin Zhang Copyright © 2014 X. Liu and M. Wang. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Reliable power and temperature control in pressurized water reactor (PWR) nuclear power plant is necessary to guarantee high efficiency and plant safety. Since the nuclear plants are quite nonlinear, the paper presents nonlinear fuzzy model predictive control (MPC), by incorporating the realistic constraints, to realize the plant optimization. T-S fuzzy modeling on nuclear power plant is utilized to approximate the nonlinear plant, based on which the nonlinear MPC controller is devised via parallel distributed compensation (PDC) scheme in order to solve the nonlinear constraint optimization problem. Improved performance compared to the traditional PID controller for a TMI-type PWR is obtained in the simulation. 1. Introduction In nuclear power plants, steam energy is produced in the nuclear reactor from continuous fission of the atoms of the fuel. e steam is then used to drive the turbine and generator to produce electricity. Since burning fossil fuels in thermal power plant can have severe environment problem, the development of nuclear power plants should be encouraged. For example in China, although the supercritical and ultrasupercritical technique, as well as integrated gasification combined cycle (IGCC) plants, have been well developed, the coal consumption still reaches about 3.91 million tons in 2012, which comprised over 70% of national primary energy. Fine particles in the air measuring less than 2.5 micrometres reached 993 micrograms per cubic meter in Beijing on 12 January 2013, compared with the limit of 25 published by the WHO guidelines. Since nuclear power plants are the complex and nonlinear systems, it is a great challenge to control the power and temperature of the nuclear reactor, especially when wide- range power variations occur in the load following condi- tion. us, various advanced control schemes have appeared during the past two decades, for example, the observer- based optimal state feedback assisted control [1, 2], the linear quadratic Gaussian with loop transfer recovery control [3, 4], the nonlinear control approach [5, 6], and the neural network/fuzzy approaches [7, 8]. Modern nuclear power plants should respond to the load demand on the power grid, which demand high plant operation performance, subject to various kinds of con- straints. Meanwhile, nuclear safety and radioactive pollution prevention have long been much concerned problem. It is therefore extremely important to reach the economical and safe operation to maximize the thermal efficiency of the nuclear power plant. Under these aims, model predictive control (MPC) shows its obvious advantage, since it is an advanced model-based control scheme. It performs an optimization procedure to calculate optimal control actions at every sampling period based on an explicit process model subject to process input, output, and state constraints. So far, MPC has been well constituted for thermal power plant control [9–11] and also in nuclear power plant water-level control [12–14]. Paper [15] reports a MPC application in a three-dimensional nuclear reactor analysis code for nuclear reactor power. Nuclear power plants are generally nonlinear, due to the frequent changes of the operating point right across the whole operation range. In general, the nonlinear model predictive control (NMPC) also online solves an optimization problem, by using the sequential quadratic program (SQP). Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 908526, 10 pages http://dx.doi.org/10.1155/2014/908526
Transcript of Research Article Nonlinear Fuzzy Model Predictive...

Research ArticleNonlinear Fuzzy Model Predictive Control for a PWRNuclear Power Plant
Xiangjie Liu and Mengyue Wang
State Key Laboratory of Alternate Electrical Power System with Renewable Energy SourcesNorth China Electric Power University Beijing 102206 China
Correspondence should be addressed to Xiangjie Liu liuxjncepueducn
Received 22 March 2014 Accepted 7 May 2014 Published 2 June 2014
Academic Editor Chengjin Zhang
Copyright copy 2014 X Liu and M WangThis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Reliable power and temperature control in pressurized water reactor (PWR) nuclear power plant is necessary to guarantee highefficiency and plant safety Since the nuclear plants are quite nonlinear the paper presents nonlinear fuzzy model predictive control(MPC) by incorporating the realistic constraints to realize the plant optimization T-S fuzzy modeling on nuclear power plantis utilized to approximate the nonlinear plant based on which the nonlinear MPC controller is devised via parallel distributedcompensation (PDC) scheme in order to solve the nonlinear constraint optimization problem Improved performance comparedto the traditional PID controller for a TMI-type PWR is obtained in the simulation
1 Introduction
In nuclear power plants steam energy is produced in thenuclear reactor from continuous fission of the atoms of thefuelThe steam is then used to drive the turbine and generatorto produce electricity
Since burning fossil fuels in thermal power plant can havesevere environment problem the development of nuclearpower plants should be encouraged For example in Chinaalthough the supercritical and ultrasupercritical technique aswell as integrated gasification combined cycle (IGCC) plantshave been well developed the coal consumption still reachesabout 391 million tons in 2012 which comprised over 70 ofnational primary energy Fine particles in the air measuringless than 25 micrometres reached 993 micrograms per cubicmeter in Beijing on 12 January 2013 compared with the limitof 25 published by the WHO guidelines
Since nuclear power plants are the complex and nonlinearsystems it is a great challenge to control the power andtemperature of the nuclear reactor especially when wide-range power variations occur in the load following condi-tion Thus various advanced control schemes have appearedduring the past two decades for example the observer-based optimal state feedback assisted control [1 2] thelinear quadratic Gaussian with loop transfer recovery control
[3 4] the nonlinear control approach [5 6] and the neuralnetworkfuzzy approaches [7 8]
Modern nuclear power plants should respond to theload demand on the power grid which demand high plantoperation performance subject to various kinds of con-straints Meanwhile nuclear safety and radioactive pollutionprevention have long been much concerned problem It istherefore extremely important to reach the economical andsafe operation to maximize the thermal efficiency of thenuclear power plant Under these aims model predictivecontrol (MPC) shows its obvious advantage since it isan advanced model-based control scheme It performs anoptimization procedure to calculate optimal control actionsat every sampling period based on an explicit process modelsubject to process input output and state constraints Sofar MPC has been well constituted for thermal power plantcontrol [9ndash11] and also in nuclear power plant water-levelcontrol [12ndash14] Paper [15] reports a MPC application in athree-dimensional nuclear reactor analysis code for nuclearreactor power
Nuclear power plants are generally nonlinear due tothe frequent changes of the operating point right acrossthe whole operation range In general the nonlinear modelpredictive control (NMPC) also online solves an optimizationproblem by using the sequential quadratic program (SQP)
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 908526 10 pageshttpdxdoiorg1011552014908526
2 Mathematical Problems in Engineering
The resulting nonlinear programming problems are usuallynonconvex and the online computational burden is generallylarge Since the nonlinearities vary with operating powerlevels as well as ageing effects [5 16] fuzzy models areused to express the plant dynamic MPCs are realized in aparallel distributed compensation (PDC) scheme that is foreach local model a MPC is designed The overall controllerwhich is nonlinear in nature is similarly constructed bycombining local controllers via fuzzy inference Simula-tions on the three-mile island- (TMI-) type pressurizedwater reactor (PWR) show the effectiveness of the proposedmethod
2 The Plant Description
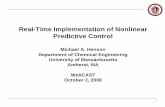
As shown in Figure 1 nuclear fission reaction in the reactorreleases tremendous energy which is transferred from thereactor to the steam generator by the coolant heating thewater in the steam generator to generate abundant steamThen the turbine is driven by steam to generate electricityThe main objective is to control the power and temperatureof the reactor by inserting or elevating the control rodsConventionally reactor control system controls the averagetemperature of the reactor core coolant to track the referencetemperature which is proportional to the turbine load inorder to guarantee well matching between the reactor powerlevel and the load demand at the same timeThis temperaturecontrol strategy considering not only high thermal efficiencybut also technical limits and economical and safe operationis widely used in modern PWR power plants
However the plant is complex and highly nonlinearwhose parameters vary with the operation conditions Mean-while realistic constraints in the system may lead to actuatorsaturation The performance of the conventional controllersis often unsatisfactory Besides unpredictable disturbancesin the temperature measurement system will induce fluctua-tions on the measuring values of coolant temperature whichmay lead to the abnormal control rod action and thus mustbe considered in the controller design The proposed Takagi-Sugeno fuzzy modeling method is used to approximatethe nonlinear plant based on which the nonlinear MPCcontroller is devised via PDC scheme in order to solve thenonlinear and constraint problems in the reactor power andtemperature control system
3 T-S Fuzzy Modeling
The reactor model considered is the point kinetics with onedelayed neutron group and also coolant and fuel temperaturefeedback It is typical for a TMI-type PWR at the middle ofthe fuel cycle rated at 2500MW [2 7]
119889
119889119905119899119903=120575120588 minus 120573
Λ119899119903+ 120582119888119903
119889
119889119905119888119903= 120582119899119903minus 120582119888119903
To turbine
Feedwater
Steam
(1) Control rod(2) Containment shell(3) Reactor core(4) Pressurizer
(5) Hot leg(6) Cold leg(7) Steam generator(8) Reactor coolant pump
1
2
3
4
7
8
5
6
Figure 1 PWR and steam generation process
119889
119889119905119879119891=1198911198911198751198860
120583119891
119899119903minusΩ
120583119891
119879119891
+Ω
2120583119891
119879119897+Ω
2120583119891
119879119890
119889
119889119905119879119897=(1 minus 119891
119891) 1198751198860
120583119888
119899119903+Ω
120583119888
119879119891
minus(2119872 + Ω)
2120583119888
119879119897+(2119872 minus Ω)
2120583119888
119879119890
119889
119889119905120575120588119903= 119866119903119911119903
120575120588 = 120575120588119903+ 120572119891(119879119891minus 1198791198910) +
120572119888
2(119879119897minus 1198791198970)
+120572119888
2(119879119890minus 1198791198900)
(1)
The symbols in the above equations are demonstrated inthe Nomenclature section
Define
120575119899119903= 119899119903minus 1198991199030
120575119888119903= 119888119903minus 1198881199030
120575119879119891= 119879119891minus 1198791198910
120575119879119897= 119879119897minus 1198791198970
120575120588119903= 120588119903minus 1205881199030
(2)
Mathematical Problems in Engineering 3
where the symbol 120575 indicates a deviation about an equilib-rium point 119899
1199030 1198881199030 1198791198910 1198791198970 and 120588
1199030correspond to the values
of 119899119903 119888119903 119879119891 119879119897 and 120588
119903at an equilibrium point respectively
Choose the state input and output vector respectively asfollows
x = [120575119899119903120575119888119903120575119879119891120575119879119897120575120588119903]119879
119906 = 119911119903
y = [120575119899119903120575119879119897]119879
(3)
The model can be linearized at the equilibrium pointusing the perturbation theory which is valid only for 120575119899
119903≪
1198991199030 The linear model can be written as the following state
space formx = Ax + B119906
y = Cx(4)
The corresponding matrices A B and C are
A =
[[[[[[[[[[[[[[
[
minus120573
Λ
120573
Λ
119899119894
1199030120572119891
Λ
119899119894
1199030120572119888
2Λ
119899119894
1199030
Λ
120582 minus120582 0 0 0
1198911198911198750119886
120583119891
0 minusΩ
120583119891
Ω
2120583119891
0
(1 minus 119891119891) 1198750119886
120583119888
0Ω
120583119888
minus2119872 + Ω
2120583119888
0
0 0 0 0 0
]]]]]]]]]]]]]]
]
B = [0 0 0 0 119866119894
119903]119879
C = [1 0 0 0 0
0 0 0 1 0]
(5)
where 1198991198941199030
is the power level and 119866119894
119903is the control rod
worth for the 119894th (119894 = 1 2 9) operating point whichis defined in Table 1 The linear model (4) is defined ateach operating point (119899119894
1199030 119866119894
119903) and the parameters in (6)
are functions of the operating point [7 17] The remainingconstant parameters are shown in Table 2 Consider thefollowing
120572119891(1198991199030) = (119899
1199030minus 424) times 10
minus5120575119896
119896∘C
120572119888(1198991199030) = (minus40119899
1199030minus 173) times 10
minus5120575119896
119896∘C
120583119888(1198991199030) = (
160
91198991199030+ 54022) MW ∘C
Ω (1198991199030) = (
5
31198991199030+ 49333) MW ∘C
119872 (1198991199030) = (280119899
1199030+ 740) MW ∘C
(6)
The sampling period is selected to be 1 s and then ninediscrete-time local models of (4) can be described as follows
x (119896 + 1) = G119894x (119896) +H
119894119906 (119896)
y (119896) = C119894x (119896)
(119894 = 1 2 9)
(7)
where
G1=
[[[[[
[
542 times 10minus1
451 times 10minus1
minus140 times 10minus2
minus359 times 10minus2
375 times 101
112 times 10minus3
999 times 10minus1
minus116 times 10minus5
minus297 times 10minus5
309 times 10minus2
654 times 10minus1
217 times 10minus1
991 times 10minus1
minus162 times 10minus2
180 times 101
240 times 10minus2
792 times 10minus3
663 times 10minus4
985 times 10minus1
658 times 10minus1
0 0 0 0 1
]]]]]
]
G2=
[[[[[
[
547 times 10minus1
452 times 10minus1
minus311 times 10minus3
minus660 times 10minus3
751
113 times 10minus3
999 times 10minus1
minus260 times 10minus6
minus550 times 10minus6
619 times 10minus3
656 times 10minus1
217 times 10minus1
997 times 10minus1
minus222 times 10minus3
361
270 times 10minus2
893 times 10minus3
845 times 10minus4
986 times 10minus1
148 times 10minus1
0 0 0 0 1
]]]]]
]
G6=
[[[[[
[
547 times 10minus1
452 times 10minus1
minus243 times 10minus3
minus794 times 10minus3
751 times 101
113 times 10minus3
999 times 10minus1
minus200 times 10minus6
minus660 times 10minus6
619 times 10minus2
656 times 10minus1
217 times 10minus1
996 times 10minus1
minus258 times 10minus3
361 times 101
211 times 10minus2
696 times 10minus3
874 times 10minus4
985 times 10minus1
116
0 0 0 0 1
]]]]]
]
G1= G4= G8 G
2= G3= G9 G
5= G6= G7
4 Mathematical Problems in Engineering
H1=
[[[[[
[
299 times 10minus3
160 times 10minus6
914 times 10minus4
333 times 10minus5
145 times 10minus4
]]]]]
]
H4=
[[[[[
[
289 times 10minus4
200 times 10minus7
883 times 10minus5
360 times 10minus6
700 times 10minus5
]]]]]
]
H8=
[[[[[
[
120 times 10minus2
630 times 10minus6
366 times 10minus3
117 times 10minus4
290 times 10minus4
]]]]]
]
H1= H2= H6 H
3= H4= H5 H
7= H8= H9
C1= [
1 0 0 0 0
0 0 0 1 0]
C1= C2= C3= C4= C5= C6= C7= C8= C9
(8)
Table 1 The definition of the operating points
119866119903
1198991199030
01 05 100029 Point 3 Point 4 Point 500145 Point 2 Point 1 Point 600070 Point 9 Point 8 Point 7
Table 2 The constant parameters in the system matrices
120582 015 sminus1
120573 0006019119891119891
092Λ 00001 s120583119891
236MWs∘C1198751198860
25000MW
According to Table 1 power level 1198991199030and control rod worth
119866119903are selected as the premise variables 119899
1199030and119866
119903are defined
in region [0 1] and region [0 0029] respectively 1198991199030
and119866119903are divided into three fuzzy sets denoted respectively as
ldquolow (L)rdquo ldquomedium (M)rdquo and ldquohigh (H)rdquo The correspondingunivariate membership functions of 119899
1199030or 119866119903are defined
by triangle membership functions as shown in Figure 2Thus the space is divided into nine fuzzy subspaces givenas follows
119877(119894)
(119894 = 1 2 9)
IF 1199111(119896) is 119865119894
1and 119911
2(119896) is 119865119894
2
THEN x119894(119896 + 1) = G
119894x119894(119896) +H
119894119906119894(119896)
y119894(119896) = C
119894x119894(119896)
(9)
where 119877(119894) denotes the 119894th fuzzy inference rule 119911119895(119896) (119895 =
1 2) are premise variables for 1198991199030and119866
119903 119865119894119895denotes the fuzzy
set partitioned for the 119895th premise variable which is valid inthe 119894th rule (119866
119894 119867119894 119862119894) represents the consequent 119894th linear
model deduced at the 119894th equilibrium point in (7)
000
70
0145
002
90
1
1
01 05 10
0
0
Subspace 6Subspace 7Subspace 1Subspace 8
A120572
120572
LM
H
L M H
Gr
nr0
Figure 2The division of fuzzy space and the definition of univariatemembership functions
By using the center of gravity defuzzification method[10 18] the final output of the nonlinear T-S model with ninefuzzy rules is
x (119896 + 1) =9
sum
119894=1
120583119894x119894(119896 + 1) =
9
sum
119894=1
120583119894(G119894x119894(119896) +H
119894119906119894(119896))
y (119896) =9
sum
119894=1
120583119894y119894(119896) =
9
sum
119894=1
120583119894C119894x119894(119896)
(10)
where
120583119894=
120583119894
sum9
119894=1120583119894
(11)
120583119894=
2
prod
119895=1
120572119865119894
119895
(119911119895(119896)) (12)
Mathematical Problems in Engineering 5
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 3 Multivariate membership functions in the fuzzy subspace1
The 120572119865119894
119895
(119911119895(119896)) denotes the univariate membership func-
tion of premise variable 119911119895(119896) with respect to the fuzzy set
119865119894
119895 120583119894is the multivariate membership function obtained by
the product of the outputs of the two univariate membershipfunctions as shown in Figure 3
Four rules are activated each time instant At point A inFigure 2 these four rules are as follows
1198771 if 119866
119903(119896) is119872 and 119899
1199030(119896) is 119872
thenx1(119896 + 1) = G
1x1(119896) +H
11199061(119896)
y1(119896) = C
1x1(119896)
1198776 if 119866
119903(119896) is119872 and 119899
1199030(119896) is119867
thenx6(119896 + 1) = G
6x6(119896) +H
61199066(119896)
y6(119896) = C
6x6(119896)
1198777 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119867
thenx7(119896 + 1) = G
7x7(119896) +H
71199067(119896)
y7(119896) = C
7x7(119896)
1198778 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119872
thenx8(119896 + 1) = G
8x8(119896) +H
81199068(119896)
y8(119896) = C
8x8(119896)
The membership functions are shown in Figure 4
4 The Nonlinear Fuzzy MPC
41 The Local Linear MPC The local linear model (7) can beexpressed as follows
x (119896) = Gx (119896 minus 1) +H119906 (119896 minus 1)
y (119896 minus 1) = Cx (119896 minus 1) (13)
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 4 Multivariate membership functions activated at point A
Subtracting (13) from (7) can result in
Δx (119896 + 1) = GΔx (119896) +HΔ119906 (119896)
Δy (119896) = CΔx (119896) (14)
where Δx(119896) = x(119896) minus x(119896 minus 1) Δ119906(119896) = 119906(119896) minus 119906(119896 minus 1) andΔy(119896) = y(119896) minus y(119896 minus 1)
Hence Δy(119896 + 1) = CΔx(119896 + 1) = CGΔx(119896) + CHΔ119906(119896)Choosing a new state variable vector x1015840(119896) =
[Δx(119896)119879 y(119896)119879]119879 can result in
[Δx (119896 + 1)y (119896 + 1) ] = [
G 0CG I] [
Δx (119896)y (119896) ] + [
HCH]Δ119906 (119896)
y (119896) = [0 I] [Δx (119896)y (119896) ]
(15)
Denote (15) as the following normal form
x1015840 (119896 + 1) = G1015840x1015840 (119896) +H1015840119906 (119896)
y (119896) = C1015840x1015840 (119896) (16)
where x1015840(119896) isin 1198771198991015840
(1198991015840
= 119899 + 119901) G1015840 = [ G 0CG I ] H
1015840
= [ HCH ] and
C1015840 = [0 I] 119899 and 119901 are respectively the number of the statevariables and the output variables
The predictive control is obtained by minimizing thefollowing cost function
119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R (17)
The control is obtained by minimizing the cost functionat each time instant 119896
Define
Y = [y(119896 + 1 | 119896)119879y(119896 + 2 | 119896)119879 sdot sdot sdot y(119896 + 119873119875| 119896)119879
]119879
r119904= [r(119896 + 1)119879r(119896 + 2)119879 sdot sdot sdot r(119896 + 119873
119875)119879
]119879
ΔU = [Δ119906 (119896) Δ119906 (119896 + 1) sdot sdot sdot Δ119906 (119896 + 119873119888minus 1)]119879
6 Mathematical Problems in Engineering
Q =
[[[[
[
Q (1) 0 sdot sdot sdot 0
0 Q (2) sdot sdot sdot 0
d
0 0 sdot sdot sdot Q (119873
119901)
]]]]
]
R =[[[[
[
R (0) 0 sdot sdot sdot 0
0 R (1) sdot sdot sdot 0
d
0 0 sdot sdot sdot R (119873
119888minus 1)
]]]]
]
(18)
where Q and R are the weighting matrices for the pre-diction error and the control respectively 119873
119901and 119873
119888are
respectively the costing horizon for the prediction errorand the control and y(119896 + 119895 | 119896)
119879 and r(119896 + 119895)119879 (119895 =
1 2 119873119901) are the optimum 119895th step ahead prediction of
the system output on data up to time instant 119896 and the119895th step ahead reference trajectory respectively ΔU is thevector composed of the future control increments whichis obtained by computing the derivative of 119869 expressed asfollows
ΔU = (R +Φ119879QΦ)minus1
Φ119879Q (r119904minus Fx (119896)) (19)
where
F =
[[[[[[[
[
C1015840G1015840
C1015840G10158402
C1015840G10158403
C1015840G1015840119873119901
]]]]]]]
]
Φ =
[[[[[[[
[
C1015840H1015840 0 0 sdot sdot sdot 0C1015840G1015840H1015840 C1015840H1015840 0 sdot sdot sdot 0C1015840G10158402H1015840 C1015840G1015840H1015840 C1015840H1015840 sdot sdot sdot 0
d
C1015840G1015840119873119901minus1H1015840 C1015840G1015840119873119901minus2H1015840 C1015840G1015840119873119901minus3H1015840 sdot sdot sdot C1015840G1015840119873119901minus119873119888H1015840
]]]]]]]
]
(20)
The optimized 119873119888steps ahead control ΔU is computed
and only the first step ahead control Δ119906(119896) is implementedusing a receding horizon principle [10] giving
Δ119906 (119896) = [1 0 sdot sdot sdot 0]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119873119888
ΔU (21)
further 119906(119896) can be obtained by
119906 (119896) = 119906 (119896 minus 1) + Δ119906 (119896) (22)
The input constraint is expressed as follows
Uminle U le Umax
(23)
U can be expressed by ΔU as follows
[[[[[[
[
119906 (119896)
119906 (119896 + 1)
119906 (119896 + 2)
119906 (119896 + 119873
119888minus 1)
]]]]]]
]
=
[[[[[[
[
1
1
1
1
]]]]]]
]
119906 (119896 minus 1) +
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
[[[[[[
[
Δ119906 (119896)
Δ119906 (119896 + 1)
Δ119906 (119896 + 2)
Δ119906 (119896 + 119873
119888minus 1)
]]]]]]
]
(24)
Define
C1=
[[[[[[
[
1
1
1
1
]]]]]]
]
C2=
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
120595 = [minusC2
C2
] 120574 = [minusUmin
+ C1119906 (119896 minus 1)
Umaxminus C1119906 (119896 minus 1)
]
(25)
and constraint (23) can be rewritten as follows
120595ΔU le 120574 (26)
Hence the constrained optimization problem can bedescribed as
min 119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R
st 120595ΔU le 120574
(27)
which can be solved by quadratic programming (QP)method
42 The Nonlinear Fuzzy MPC Based on the T-S fuzzymodel the controller is devised via the parallel distributedcontrol (PDC) scheme [19 20] In this scheme the overallcontroller which is naturally nonlinear is a fuzzy combi-nation of each individual linear controller designed basedon the corresponding local model Here a nonlinear MPCcontroller consisting of nine local MPC controllers is con-stituted as shown in Figure 5 For each local linear modela conventional MPC controller is designed independently
Mathematical Problems in Engineering 7
Table 3 The parameters of the nine local controllers
Parameters 119894th controller1 2 3 4 5 6 7 8 9
119902 1 1 1 1 1 1 1 1 1119903 007 001 002 007 01 01 01 005 01119873119901
380 430 400 340 290 300 325 400 460119873119888
50 45 45 50 60 60 60 40 30
MPC1
MPC9
Nonlinear plant
Temperature of coolant leaving
the reactorSet point
Controller
Tl0
u(k) Tl
1205831
1205839
u1
u9
+
Figure 5 The schematic diagram of fuzzy MPC system
Consequently the final control is the weighted sum of thecontrol obtained from nine local MPC controllers Considerthe following
119906 (119896) =
9
sum
119894=1
120583119894119906119894(119896) (28)
where 119906119894(119896) is the control of the 119894th local predictive controller
and 120583119894is defined previously in (11) Since fuzzy logics dom-
inate the switching between local controllers the resultingcontrol can be smooth by properly selecting the weights 120583
119894
[10]
5 The Application to the PWR NuclearPower Plant
In using the proposed fuzzy MPC the reference temperaturefunction of power level is defined as follows
1198791198970= 290 + 2451119899
1199030 (29)
Figure 6 shows this relationshipAssume that the maximum speed of control rod is 02
fraction of core length per second Hence the constraint onthe control is considered as minus02 le 119906 le 02 which is involvedin the optimization algorithm of MPC
Define
Q = 119902 times
[[[[
[
I2times2
0 sdot sdot sdot 00 I2times2
sdot sdot sdot 0
d
0 0 sdot sdot sdot I2times2
]]]]
]119873119901times119873119901
(30)
and R = 119903 times I119873119888times119873119888
where 119902 and 119903 are the two coefficientsAssume the control rod worth119866
119903to be 00145 the parameters
of the nine local controllers are listed in Table 3
20 40 60 80 100
290
31451
Power level ()0
300
310
Tem
pera
ture
(∘C)
Tl
Figure 6 Reference temperature function of power level
The performance of the nonlinear fuzzy MPC can beevaluated in three cases
Case A Full power operation that is 100 rarr 90 rarr
100 step changes in power level Comparison of theperformance between the proposed fuzzy MPC and theconventional PID controller is presented in Figures 7(a) and7(b)The temperature and the power stabilize to their respectset points in an acceptable time whereas the nonlinear fuzzyMPC reduces the fluctuation obviously In real-time nuclearpower control inserting the control rod can slow down therelease of energy in the reactor so that the temperature andpower level are decreased while lifting the control rod speedwill raise the temperature and power level
Case B Low power operation that is 20 rarr 10 rarr 20step changes in power level Comparison of the performancebetween the proposed controller and the conventional PIDcontroller is presented in Figures 8(a) and 8(b) showingthe obvious advantage of the proposed fuzzy MPC It isnoticed that the response time is longer than that in thefull power operation and the resulting fluctuation is moresevere
In both cases the constraint on the control rod speed canbe handled by the proposed fuzzy MPC effectively while thePID controller cannot achieve it as shown in Figures 7(c) and8(c)
8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
The resulting nonlinear programming problems are usuallynonconvex and the online computational burden is generallylarge Since the nonlinearities vary with operating powerlevels as well as ageing effects [5 16] fuzzy models areused to express the plant dynamic MPCs are realized in aparallel distributed compensation (PDC) scheme that is foreach local model a MPC is designed The overall controllerwhich is nonlinear in nature is similarly constructed bycombining local controllers via fuzzy inference Simula-tions on the three-mile island- (TMI-) type pressurizedwater reactor (PWR) show the effectiveness of the proposedmethod
2 The Plant Description
As shown in Figure 1 nuclear fission reaction in the reactorreleases tremendous energy which is transferred from thereactor to the steam generator by the coolant heating thewater in the steam generator to generate abundant steamThen the turbine is driven by steam to generate electricityThe main objective is to control the power and temperatureof the reactor by inserting or elevating the control rodsConventionally reactor control system controls the averagetemperature of the reactor core coolant to track the referencetemperature which is proportional to the turbine load inorder to guarantee well matching between the reactor powerlevel and the load demand at the same timeThis temperaturecontrol strategy considering not only high thermal efficiencybut also technical limits and economical and safe operationis widely used in modern PWR power plants
However the plant is complex and highly nonlinearwhose parameters vary with the operation conditions Mean-while realistic constraints in the system may lead to actuatorsaturation The performance of the conventional controllersis often unsatisfactory Besides unpredictable disturbancesin the temperature measurement system will induce fluctua-tions on the measuring values of coolant temperature whichmay lead to the abnormal control rod action and thus mustbe considered in the controller design The proposed Takagi-Sugeno fuzzy modeling method is used to approximatethe nonlinear plant based on which the nonlinear MPCcontroller is devised via PDC scheme in order to solve thenonlinear and constraint problems in the reactor power andtemperature control system
3 T-S Fuzzy Modeling
The reactor model considered is the point kinetics with onedelayed neutron group and also coolant and fuel temperaturefeedback It is typical for a TMI-type PWR at the middle ofthe fuel cycle rated at 2500MW [2 7]
119889
119889119905119899119903=120575120588 minus 120573
Λ119899119903+ 120582119888119903
119889
119889119905119888119903= 120582119899119903minus 120582119888119903
To turbine
Feedwater
Steam
(1) Control rod(2) Containment shell(3) Reactor core(4) Pressurizer
(5) Hot leg(6) Cold leg(7) Steam generator(8) Reactor coolant pump
1
2
3
4
7
8
5
6
Figure 1 PWR and steam generation process
119889
119889119905119879119891=1198911198911198751198860
120583119891
119899119903minusΩ
120583119891
119879119891
+Ω
2120583119891
119879119897+Ω
2120583119891
119879119890
119889
119889119905119879119897=(1 minus 119891
119891) 1198751198860
120583119888
119899119903+Ω
120583119888
119879119891
minus(2119872 + Ω)
2120583119888
119879119897+(2119872 minus Ω)
2120583119888
119879119890
119889
119889119905120575120588119903= 119866119903119911119903
120575120588 = 120575120588119903+ 120572119891(119879119891minus 1198791198910) +
120572119888
2(119879119897minus 1198791198970)
+120572119888
2(119879119890minus 1198791198900)
(1)
The symbols in the above equations are demonstrated inthe Nomenclature section
Define
120575119899119903= 119899119903minus 1198991199030
120575119888119903= 119888119903minus 1198881199030
120575119879119891= 119879119891minus 1198791198910
120575119879119897= 119879119897minus 1198791198970
120575120588119903= 120588119903minus 1205881199030
(2)
Mathematical Problems in Engineering 3
where the symbol 120575 indicates a deviation about an equilib-rium point 119899
1199030 1198881199030 1198791198910 1198791198970 and 120588
1199030correspond to the values
of 119899119903 119888119903 119879119891 119879119897 and 120588
119903at an equilibrium point respectively
Choose the state input and output vector respectively asfollows
x = [120575119899119903120575119888119903120575119879119891120575119879119897120575120588119903]119879
119906 = 119911119903
y = [120575119899119903120575119879119897]119879
(3)
The model can be linearized at the equilibrium pointusing the perturbation theory which is valid only for 120575119899
119903≪
1198991199030 The linear model can be written as the following state
space formx = Ax + B119906
y = Cx(4)
The corresponding matrices A B and C are
A =
[[[[[[[[[[[[[[
[
minus120573
Λ
120573
Λ
119899119894
1199030120572119891
Λ
119899119894
1199030120572119888
2Λ
119899119894
1199030
Λ
120582 minus120582 0 0 0
1198911198911198750119886
120583119891
0 minusΩ
120583119891
Ω
2120583119891
0
(1 minus 119891119891) 1198750119886
120583119888
0Ω
120583119888
minus2119872 + Ω
2120583119888
0
0 0 0 0 0
]]]]]]]]]]]]]]
]
B = [0 0 0 0 119866119894
119903]119879
C = [1 0 0 0 0
0 0 0 1 0]
(5)
where 1198991198941199030
is the power level and 119866119894
119903is the control rod
worth for the 119894th (119894 = 1 2 9) operating point whichis defined in Table 1 The linear model (4) is defined ateach operating point (119899119894
1199030 119866119894
119903) and the parameters in (6)
are functions of the operating point [7 17] The remainingconstant parameters are shown in Table 2 Consider thefollowing
120572119891(1198991199030) = (119899
1199030minus 424) times 10
minus5120575119896
119896∘C
120572119888(1198991199030) = (minus40119899
1199030minus 173) times 10
minus5120575119896
119896∘C
120583119888(1198991199030) = (
160
91198991199030+ 54022) MW ∘C
Ω (1198991199030) = (
5
31198991199030+ 49333) MW ∘C
119872 (1198991199030) = (280119899
1199030+ 740) MW ∘C
(6)
The sampling period is selected to be 1 s and then ninediscrete-time local models of (4) can be described as follows
x (119896 + 1) = G119894x (119896) +H
119894119906 (119896)
y (119896) = C119894x (119896)
(119894 = 1 2 9)
(7)
where
G1=
[[[[[
[
542 times 10minus1
451 times 10minus1
minus140 times 10minus2
minus359 times 10minus2
375 times 101
112 times 10minus3
999 times 10minus1
minus116 times 10minus5
minus297 times 10minus5
309 times 10minus2
654 times 10minus1
217 times 10minus1
991 times 10minus1
minus162 times 10minus2
180 times 101
240 times 10minus2
792 times 10minus3
663 times 10minus4
985 times 10minus1
658 times 10minus1
0 0 0 0 1
]]]]]
]
G2=
[[[[[
[
547 times 10minus1
452 times 10minus1
minus311 times 10minus3
minus660 times 10minus3
751
113 times 10minus3
999 times 10minus1
minus260 times 10minus6
minus550 times 10minus6
619 times 10minus3
656 times 10minus1
217 times 10minus1
997 times 10minus1
minus222 times 10minus3
361
270 times 10minus2
893 times 10minus3
845 times 10minus4
986 times 10minus1
148 times 10minus1
0 0 0 0 1
]]]]]
]
G6=
[[[[[
[
547 times 10minus1
452 times 10minus1
minus243 times 10minus3
minus794 times 10minus3
751 times 101
113 times 10minus3
999 times 10minus1
minus200 times 10minus6
minus660 times 10minus6
619 times 10minus2
656 times 10minus1
217 times 10minus1
996 times 10minus1
minus258 times 10minus3
361 times 101
211 times 10minus2
696 times 10minus3
874 times 10minus4
985 times 10minus1
116
0 0 0 0 1
]]]]]
]
G1= G4= G8 G
2= G3= G9 G
5= G6= G7
4 Mathematical Problems in Engineering
H1=
[[[[[
[
299 times 10minus3
160 times 10minus6
914 times 10minus4
333 times 10minus5
145 times 10minus4
]]]]]
]
H4=
[[[[[
[
289 times 10minus4
200 times 10minus7
883 times 10minus5
360 times 10minus6
700 times 10minus5
]]]]]
]
H8=
[[[[[
[
120 times 10minus2
630 times 10minus6
366 times 10minus3
117 times 10minus4
290 times 10minus4
]]]]]
]
H1= H2= H6 H
3= H4= H5 H
7= H8= H9
C1= [
1 0 0 0 0
0 0 0 1 0]
C1= C2= C3= C4= C5= C6= C7= C8= C9
(8)
Table 1 The definition of the operating points
119866119903
1198991199030
01 05 100029 Point 3 Point 4 Point 500145 Point 2 Point 1 Point 600070 Point 9 Point 8 Point 7
Table 2 The constant parameters in the system matrices
120582 015 sminus1
120573 0006019119891119891
092Λ 00001 s120583119891
236MWs∘C1198751198860
25000MW
According to Table 1 power level 1198991199030and control rod worth
119866119903are selected as the premise variables 119899
1199030and119866
119903are defined
in region [0 1] and region [0 0029] respectively 1198991199030
and119866119903are divided into three fuzzy sets denoted respectively as
ldquolow (L)rdquo ldquomedium (M)rdquo and ldquohigh (H)rdquo The correspondingunivariate membership functions of 119899
1199030or 119866119903are defined
by triangle membership functions as shown in Figure 2Thus the space is divided into nine fuzzy subspaces givenas follows
119877(119894)
(119894 = 1 2 9)
IF 1199111(119896) is 119865119894
1and 119911
2(119896) is 119865119894
2
THEN x119894(119896 + 1) = G
119894x119894(119896) +H
119894119906119894(119896)
y119894(119896) = C
119894x119894(119896)
(9)
where 119877(119894) denotes the 119894th fuzzy inference rule 119911119895(119896) (119895 =
1 2) are premise variables for 1198991199030and119866
119903 119865119894119895denotes the fuzzy
set partitioned for the 119895th premise variable which is valid inthe 119894th rule (119866
119894 119867119894 119862119894) represents the consequent 119894th linear
model deduced at the 119894th equilibrium point in (7)
000
70
0145
002
90
1
1
01 05 10
0
0
Subspace 6Subspace 7Subspace 1Subspace 8
A120572
120572
LM
H
L M H
Gr
nr0
Figure 2The division of fuzzy space and the definition of univariatemembership functions
By using the center of gravity defuzzification method[10 18] the final output of the nonlinear T-S model with ninefuzzy rules is
x (119896 + 1) =9
sum
119894=1
120583119894x119894(119896 + 1) =
9
sum
119894=1
120583119894(G119894x119894(119896) +H
119894119906119894(119896))
y (119896) =9
sum
119894=1
120583119894y119894(119896) =
9
sum
119894=1
120583119894C119894x119894(119896)
(10)
where
120583119894=
120583119894
sum9
119894=1120583119894
(11)
120583119894=
2
prod
119895=1
120572119865119894
119895
(119911119895(119896)) (12)
Mathematical Problems in Engineering 5
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 3 Multivariate membership functions in the fuzzy subspace1
The 120572119865119894
119895
(119911119895(119896)) denotes the univariate membership func-
tion of premise variable 119911119895(119896) with respect to the fuzzy set
119865119894
119895 120583119894is the multivariate membership function obtained by
the product of the outputs of the two univariate membershipfunctions as shown in Figure 3
Four rules are activated each time instant At point A inFigure 2 these four rules are as follows
1198771 if 119866
119903(119896) is119872 and 119899
1199030(119896) is 119872
thenx1(119896 + 1) = G
1x1(119896) +H
11199061(119896)
y1(119896) = C
1x1(119896)
1198776 if 119866
119903(119896) is119872 and 119899
1199030(119896) is119867
thenx6(119896 + 1) = G
6x6(119896) +H
61199066(119896)
y6(119896) = C
6x6(119896)
1198777 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119867
thenx7(119896 + 1) = G
7x7(119896) +H
71199067(119896)
y7(119896) = C
7x7(119896)
1198778 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119872
thenx8(119896 + 1) = G
8x8(119896) +H
81199068(119896)
y8(119896) = C
8x8(119896)
The membership functions are shown in Figure 4
4 The Nonlinear Fuzzy MPC
41 The Local Linear MPC The local linear model (7) can beexpressed as follows
x (119896) = Gx (119896 minus 1) +H119906 (119896 minus 1)
y (119896 minus 1) = Cx (119896 minus 1) (13)
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 4 Multivariate membership functions activated at point A
Subtracting (13) from (7) can result in
Δx (119896 + 1) = GΔx (119896) +HΔ119906 (119896)
Δy (119896) = CΔx (119896) (14)
where Δx(119896) = x(119896) minus x(119896 minus 1) Δ119906(119896) = 119906(119896) minus 119906(119896 minus 1) andΔy(119896) = y(119896) minus y(119896 minus 1)
Hence Δy(119896 + 1) = CΔx(119896 + 1) = CGΔx(119896) + CHΔ119906(119896)Choosing a new state variable vector x1015840(119896) =
[Δx(119896)119879 y(119896)119879]119879 can result in
[Δx (119896 + 1)y (119896 + 1) ] = [
G 0CG I] [
Δx (119896)y (119896) ] + [
HCH]Δ119906 (119896)
y (119896) = [0 I] [Δx (119896)y (119896) ]
(15)
Denote (15) as the following normal form
x1015840 (119896 + 1) = G1015840x1015840 (119896) +H1015840119906 (119896)
y (119896) = C1015840x1015840 (119896) (16)
where x1015840(119896) isin 1198771198991015840
(1198991015840
= 119899 + 119901) G1015840 = [ G 0CG I ] H
1015840
= [ HCH ] and
C1015840 = [0 I] 119899 and 119901 are respectively the number of the statevariables and the output variables
The predictive control is obtained by minimizing thefollowing cost function
119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R (17)
The control is obtained by minimizing the cost functionat each time instant 119896
Define
Y = [y(119896 + 1 | 119896)119879y(119896 + 2 | 119896)119879 sdot sdot sdot y(119896 + 119873119875| 119896)119879
]119879
r119904= [r(119896 + 1)119879r(119896 + 2)119879 sdot sdot sdot r(119896 + 119873
119875)119879
]119879
ΔU = [Δ119906 (119896) Δ119906 (119896 + 1) sdot sdot sdot Δ119906 (119896 + 119873119888minus 1)]119879
6 Mathematical Problems in Engineering
Q =
[[[[
[
Q (1) 0 sdot sdot sdot 0
0 Q (2) sdot sdot sdot 0
d
0 0 sdot sdot sdot Q (119873
119901)
]]]]
]
R =[[[[
[
R (0) 0 sdot sdot sdot 0
0 R (1) sdot sdot sdot 0
d
0 0 sdot sdot sdot R (119873
119888minus 1)
]]]]
]
(18)
where Q and R are the weighting matrices for the pre-diction error and the control respectively 119873
119901and 119873
119888are
respectively the costing horizon for the prediction errorand the control and y(119896 + 119895 | 119896)
119879 and r(119896 + 119895)119879 (119895 =
1 2 119873119901) are the optimum 119895th step ahead prediction of
the system output on data up to time instant 119896 and the119895th step ahead reference trajectory respectively ΔU is thevector composed of the future control increments whichis obtained by computing the derivative of 119869 expressed asfollows
ΔU = (R +Φ119879QΦ)minus1
Φ119879Q (r119904minus Fx (119896)) (19)
where
F =
[[[[[[[
[
C1015840G1015840
C1015840G10158402
C1015840G10158403
C1015840G1015840119873119901
]]]]]]]
]
Φ =
[[[[[[[
[
C1015840H1015840 0 0 sdot sdot sdot 0C1015840G1015840H1015840 C1015840H1015840 0 sdot sdot sdot 0C1015840G10158402H1015840 C1015840G1015840H1015840 C1015840H1015840 sdot sdot sdot 0
d
C1015840G1015840119873119901minus1H1015840 C1015840G1015840119873119901minus2H1015840 C1015840G1015840119873119901minus3H1015840 sdot sdot sdot C1015840G1015840119873119901minus119873119888H1015840
]]]]]]]
]
(20)
The optimized 119873119888steps ahead control ΔU is computed
and only the first step ahead control Δ119906(119896) is implementedusing a receding horizon principle [10] giving
Δ119906 (119896) = [1 0 sdot sdot sdot 0]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119873119888
ΔU (21)
further 119906(119896) can be obtained by
119906 (119896) = 119906 (119896 minus 1) + Δ119906 (119896) (22)
The input constraint is expressed as follows
Uminle U le Umax
(23)
U can be expressed by ΔU as follows
[[[[[[
[
119906 (119896)
119906 (119896 + 1)
119906 (119896 + 2)
119906 (119896 + 119873
119888minus 1)
]]]]]]
]
=
[[[[[[
[
1
1
1
1
]]]]]]
]
119906 (119896 minus 1) +
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
[[[[[[
[
Δ119906 (119896)
Δ119906 (119896 + 1)
Δ119906 (119896 + 2)
Δ119906 (119896 + 119873
119888minus 1)
]]]]]]
]
(24)
Define
C1=
[[[[[[
[
1
1
1
1
]]]]]]
]
C2=
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
120595 = [minusC2
C2
] 120574 = [minusUmin
+ C1119906 (119896 minus 1)
Umaxminus C1119906 (119896 minus 1)
]
(25)
and constraint (23) can be rewritten as follows
120595ΔU le 120574 (26)
Hence the constrained optimization problem can bedescribed as
min 119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R
st 120595ΔU le 120574
(27)
which can be solved by quadratic programming (QP)method
42 The Nonlinear Fuzzy MPC Based on the T-S fuzzymodel the controller is devised via the parallel distributedcontrol (PDC) scheme [19 20] In this scheme the overallcontroller which is naturally nonlinear is a fuzzy combi-nation of each individual linear controller designed basedon the corresponding local model Here a nonlinear MPCcontroller consisting of nine local MPC controllers is con-stituted as shown in Figure 5 For each local linear modela conventional MPC controller is designed independently
Mathematical Problems in Engineering 7
Table 3 The parameters of the nine local controllers
Parameters 119894th controller1 2 3 4 5 6 7 8 9
119902 1 1 1 1 1 1 1 1 1119903 007 001 002 007 01 01 01 005 01119873119901
380 430 400 340 290 300 325 400 460119873119888
50 45 45 50 60 60 60 40 30
MPC1
MPC9
Nonlinear plant
Temperature of coolant leaving
the reactorSet point
Controller
Tl0
u(k) Tl
1205831
1205839
u1
u9
+
Figure 5 The schematic diagram of fuzzy MPC system
Consequently the final control is the weighted sum of thecontrol obtained from nine local MPC controllers Considerthe following
119906 (119896) =
9
sum
119894=1
120583119894119906119894(119896) (28)
where 119906119894(119896) is the control of the 119894th local predictive controller
and 120583119894is defined previously in (11) Since fuzzy logics dom-
inate the switching between local controllers the resultingcontrol can be smooth by properly selecting the weights 120583
119894
[10]
5 The Application to the PWR NuclearPower Plant
In using the proposed fuzzy MPC the reference temperaturefunction of power level is defined as follows
1198791198970= 290 + 2451119899
1199030 (29)
Figure 6 shows this relationshipAssume that the maximum speed of control rod is 02
fraction of core length per second Hence the constraint onthe control is considered as minus02 le 119906 le 02 which is involvedin the optimization algorithm of MPC
Define
Q = 119902 times
[[[[
[
I2times2
0 sdot sdot sdot 00 I2times2
sdot sdot sdot 0
d
0 0 sdot sdot sdot I2times2
]]]]
]119873119901times119873119901
(30)
and R = 119903 times I119873119888times119873119888
where 119902 and 119903 are the two coefficientsAssume the control rod worth119866
119903to be 00145 the parameters
of the nine local controllers are listed in Table 3
20 40 60 80 100
290
31451
Power level ()0
300
310
Tem
pera
ture
(∘C)
Tl
Figure 6 Reference temperature function of power level
The performance of the nonlinear fuzzy MPC can beevaluated in three cases
Case A Full power operation that is 100 rarr 90 rarr
100 step changes in power level Comparison of theperformance between the proposed fuzzy MPC and theconventional PID controller is presented in Figures 7(a) and7(b)The temperature and the power stabilize to their respectset points in an acceptable time whereas the nonlinear fuzzyMPC reduces the fluctuation obviously In real-time nuclearpower control inserting the control rod can slow down therelease of energy in the reactor so that the temperature andpower level are decreased while lifting the control rod speedwill raise the temperature and power level
Case B Low power operation that is 20 rarr 10 rarr 20step changes in power level Comparison of the performancebetween the proposed controller and the conventional PIDcontroller is presented in Figures 8(a) and 8(b) showingthe obvious advantage of the proposed fuzzy MPC It isnoticed that the response time is longer than that in thefull power operation and the resulting fluctuation is moresevere
In both cases the constraint on the control rod speed canbe handled by the proposed fuzzy MPC effectively while thePID controller cannot achieve it as shown in Figures 7(c) and8(c)
8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
where the symbol 120575 indicates a deviation about an equilib-rium point 119899
1199030 1198881199030 1198791198910 1198791198970 and 120588
1199030correspond to the values
of 119899119903 119888119903 119879119891 119879119897 and 120588
119903at an equilibrium point respectively
Choose the state input and output vector respectively asfollows
x = [120575119899119903120575119888119903120575119879119891120575119879119897120575120588119903]119879
119906 = 119911119903
y = [120575119899119903120575119879119897]119879
(3)
The model can be linearized at the equilibrium pointusing the perturbation theory which is valid only for 120575119899
119903≪
1198991199030 The linear model can be written as the following state
space formx = Ax + B119906
y = Cx(4)
The corresponding matrices A B and C are
A =
[[[[[[[[[[[[[[
[
minus120573
Λ
120573
Λ
119899119894
1199030120572119891
Λ
119899119894
1199030120572119888
2Λ
119899119894
1199030
Λ
120582 minus120582 0 0 0
1198911198911198750119886
120583119891
0 minusΩ
120583119891
Ω
2120583119891
0
(1 minus 119891119891) 1198750119886
120583119888
0Ω
120583119888
minus2119872 + Ω
2120583119888
0
0 0 0 0 0
]]]]]]]]]]]]]]
]
B = [0 0 0 0 119866119894
119903]119879
C = [1 0 0 0 0
0 0 0 1 0]
(5)
where 1198991198941199030
is the power level and 119866119894
119903is the control rod
worth for the 119894th (119894 = 1 2 9) operating point whichis defined in Table 1 The linear model (4) is defined ateach operating point (119899119894
1199030 119866119894
119903) and the parameters in (6)
are functions of the operating point [7 17] The remainingconstant parameters are shown in Table 2 Consider thefollowing
120572119891(1198991199030) = (119899
1199030minus 424) times 10
minus5120575119896
119896∘C
120572119888(1198991199030) = (minus40119899
1199030minus 173) times 10
minus5120575119896
119896∘C
120583119888(1198991199030) = (
160
91198991199030+ 54022) MW ∘C
Ω (1198991199030) = (
5
31198991199030+ 49333) MW ∘C
119872 (1198991199030) = (280119899
1199030+ 740) MW ∘C
(6)
The sampling period is selected to be 1 s and then ninediscrete-time local models of (4) can be described as follows
x (119896 + 1) = G119894x (119896) +H
119894119906 (119896)
y (119896) = C119894x (119896)
(119894 = 1 2 9)
(7)
where
G1=
[[[[[
[
542 times 10minus1
451 times 10minus1
minus140 times 10minus2
minus359 times 10minus2
375 times 101
112 times 10minus3
999 times 10minus1
minus116 times 10minus5
minus297 times 10minus5
309 times 10minus2
654 times 10minus1
217 times 10minus1
991 times 10minus1
minus162 times 10minus2
180 times 101
240 times 10minus2
792 times 10minus3
663 times 10minus4
985 times 10minus1
658 times 10minus1
0 0 0 0 1
]]]]]
]
G2=
[[[[[
[
547 times 10minus1
452 times 10minus1
minus311 times 10minus3
minus660 times 10minus3
751
113 times 10minus3
999 times 10minus1
minus260 times 10minus6
minus550 times 10minus6
619 times 10minus3
656 times 10minus1
217 times 10minus1
997 times 10minus1
minus222 times 10minus3
361
270 times 10minus2
893 times 10minus3
845 times 10minus4
986 times 10minus1
148 times 10minus1
0 0 0 0 1
]]]]]
]
G6=
[[[[[
[
547 times 10minus1
452 times 10minus1
minus243 times 10minus3
minus794 times 10minus3
751 times 101
113 times 10minus3
999 times 10minus1
minus200 times 10minus6
minus660 times 10minus6
619 times 10minus2
656 times 10minus1
217 times 10minus1
996 times 10minus1
minus258 times 10minus3
361 times 101
211 times 10minus2
696 times 10minus3
874 times 10minus4
985 times 10minus1
116
0 0 0 0 1
]]]]]
]
G1= G4= G8 G
2= G3= G9 G
5= G6= G7
4 Mathematical Problems in Engineering
H1=
[[[[[
[
299 times 10minus3
160 times 10minus6
914 times 10minus4
333 times 10minus5
145 times 10minus4
]]]]]
]
H4=
[[[[[
[
289 times 10minus4
200 times 10minus7
883 times 10minus5
360 times 10minus6
700 times 10minus5
]]]]]
]
H8=
[[[[[
[
120 times 10minus2
630 times 10minus6
366 times 10minus3
117 times 10minus4
290 times 10minus4
]]]]]
]
H1= H2= H6 H
3= H4= H5 H
7= H8= H9
C1= [
1 0 0 0 0
0 0 0 1 0]
C1= C2= C3= C4= C5= C6= C7= C8= C9
(8)
Table 1 The definition of the operating points
119866119903
1198991199030
01 05 100029 Point 3 Point 4 Point 500145 Point 2 Point 1 Point 600070 Point 9 Point 8 Point 7
Table 2 The constant parameters in the system matrices
120582 015 sminus1
120573 0006019119891119891
092Λ 00001 s120583119891
236MWs∘C1198751198860
25000MW
According to Table 1 power level 1198991199030and control rod worth
119866119903are selected as the premise variables 119899
1199030and119866
119903are defined
in region [0 1] and region [0 0029] respectively 1198991199030
and119866119903are divided into three fuzzy sets denoted respectively as
ldquolow (L)rdquo ldquomedium (M)rdquo and ldquohigh (H)rdquo The correspondingunivariate membership functions of 119899
1199030or 119866119903are defined
by triangle membership functions as shown in Figure 2Thus the space is divided into nine fuzzy subspaces givenas follows
119877(119894)
(119894 = 1 2 9)
IF 1199111(119896) is 119865119894
1and 119911
2(119896) is 119865119894
2
THEN x119894(119896 + 1) = G
119894x119894(119896) +H
119894119906119894(119896)
y119894(119896) = C
119894x119894(119896)
(9)
where 119877(119894) denotes the 119894th fuzzy inference rule 119911119895(119896) (119895 =
1 2) are premise variables for 1198991199030and119866
119903 119865119894119895denotes the fuzzy
set partitioned for the 119895th premise variable which is valid inthe 119894th rule (119866
119894 119867119894 119862119894) represents the consequent 119894th linear
model deduced at the 119894th equilibrium point in (7)
000
70
0145
002
90
1
1
01 05 10
0
0
Subspace 6Subspace 7Subspace 1Subspace 8
A120572
120572
LM
H
L M H
Gr
nr0
Figure 2The division of fuzzy space and the definition of univariatemembership functions
By using the center of gravity defuzzification method[10 18] the final output of the nonlinear T-S model with ninefuzzy rules is
x (119896 + 1) =9
sum
119894=1
120583119894x119894(119896 + 1) =
9
sum
119894=1
120583119894(G119894x119894(119896) +H
119894119906119894(119896))
y (119896) =9
sum
119894=1
120583119894y119894(119896) =
9
sum
119894=1
120583119894C119894x119894(119896)
(10)
where
120583119894=
120583119894
sum9
119894=1120583119894
(11)
120583119894=
2
prod
119895=1
120572119865119894
119895
(119911119895(119896)) (12)
Mathematical Problems in Engineering 5
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 3 Multivariate membership functions in the fuzzy subspace1
The 120572119865119894
119895
(119911119895(119896)) denotes the univariate membership func-
tion of premise variable 119911119895(119896) with respect to the fuzzy set
119865119894
119895 120583119894is the multivariate membership function obtained by
the product of the outputs of the two univariate membershipfunctions as shown in Figure 3
Four rules are activated each time instant At point A inFigure 2 these four rules are as follows
1198771 if 119866
119903(119896) is119872 and 119899
1199030(119896) is 119872
thenx1(119896 + 1) = G
1x1(119896) +H
11199061(119896)
y1(119896) = C
1x1(119896)
1198776 if 119866
119903(119896) is119872 and 119899
1199030(119896) is119867
thenx6(119896 + 1) = G
6x6(119896) +H
61199066(119896)
y6(119896) = C
6x6(119896)
1198777 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119867
thenx7(119896 + 1) = G
7x7(119896) +H
71199067(119896)
y7(119896) = C
7x7(119896)
1198778 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119872
thenx8(119896 + 1) = G
8x8(119896) +H
81199068(119896)
y8(119896) = C
8x8(119896)
The membership functions are shown in Figure 4
4 The Nonlinear Fuzzy MPC
41 The Local Linear MPC The local linear model (7) can beexpressed as follows
x (119896) = Gx (119896 minus 1) +H119906 (119896 minus 1)
y (119896 minus 1) = Cx (119896 minus 1) (13)
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 4 Multivariate membership functions activated at point A
Subtracting (13) from (7) can result in
Δx (119896 + 1) = GΔx (119896) +HΔ119906 (119896)
Δy (119896) = CΔx (119896) (14)
where Δx(119896) = x(119896) minus x(119896 minus 1) Δ119906(119896) = 119906(119896) minus 119906(119896 minus 1) andΔy(119896) = y(119896) minus y(119896 minus 1)
Hence Δy(119896 + 1) = CΔx(119896 + 1) = CGΔx(119896) + CHΔ119906(119896)Choosing a new state variable vector x1015840(119896) =
[Δx(119896)119879 y(119896)119879]119879 can result in
[Δx (119896 + 1)y (119896 + 1) ] = [
G 0CG I] [
Δx (119896)y (119896) ] + [
HCH]Δ119906 (119896)
y (119896) = [0 I] [Δx (119896)y (119896) ]
(15)
Denote (15) as the following normal form
x1015840 (119896 + 1) = G1015840x1015840 (119896) +H1015840119906 (119896)
y (119896) = C1015840x1015840 (119896) (16)
where x1015840(119896) isin 1198771198991015840
(1198991015840
= 119899 + 119901) G1015840 = [ G 0CG I ] H
1015840
= [ HCH ] and
C1015840 = [0 I] 119899 and 119901 are respectively the number of the statevariables and the output variables
The predictive control is obtained by minimizing thefollowing cost function
119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R (17)
The control is obtained by minimizing the cost functionat each time instant 119896
Define
Y = [y(119896 + 1 | 119896)119879y(119896 + 2 | 119896)119879 sdot sdot sdot y(119896 + 119873119875| 119896)119879
]119879
r119904= [r(119896 + 1)119879r(119896 + 2)119879 sdot sdot sdot r(119896 + 119873
119875)119879
]119879
ΔU = [Δ119906 (119896) Δ119906 (119896 + 1) sdot sdot sdot Δ119906 (119896 + 119873119888minus 1)]119879
6 Mathematical Problems in Engineering
Q =
[[[[
[
Q (1) 0 sdot sdot sdot 0
0 Q (2) sdot sdot sdot 0
d
0 0 sdot sdot sdot Q (119873
119901)
]]]]
]
R =[[[[
[
R (0) 0 sdot sdot sdot 0
0 R (1) sdot sdot sdot 0
d
0 0 sdot sdot sdot R (119873
119888minus 1)
]]]]
]
(18)
where Q and R are the weighting matrices for the pre-diction error and the control respectively 119873
119901and 119873
119888are
respectively the costing horizon for the prediction errorand the control and y(119896 + 119895 | 119896)
119879 and r(119896 + 119895)119879 (119895 =
1 2 119873119901) are the optimum 119895th step ahead prediction of
the system output on data up to time instant 119896 and the119895th step ahead reference trajectory respectively ΔU is thevector composed of the future control increments whichis obtained by computing the derivative of 119869 expressed asfollows
ΔU = (R +Φ119879QΦ)minus1
Φ119879Q (r119904minus Fx (119896)) (19)
where
F =
[[[[[[[
[
C1015840G1015840
C1015840G10158402
C1015840G10158403
C1015840G1015840119873119901
]]]]]]]
]
Φ =
[[[[[[[
[
C1015840H1015840 0 0 sdot sdot sdot 0C1015840G1015840H1015840 C1015840H1015840 0 sdot sdot sdot 0C1015840G10158402H1015840 C1015840G1015840H1015840 C1015840H1015840 sdot sdot sdot 0
d
C1015840G1015840119873119901minus1H1015840 C1015840G1015840119873119901minus2H1015840 C1015840G1015840119873119901minus3H1015840 sdot sdot sdot C1015840G1015840119873119901minus119873119888H1015840
]]]]]]]
]
(20)
The optimized 119873119888steps ahead control ΔU is computed
and only the first step ahead control Δ119906(119896) is implementedusing a receding horizon principle [10] giving
Δ119906 (119896) = [1 0 sdot sdot sdot 0]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119873119888
ΔU (21)
further 119906(119896) can be obtained by
119906 (119896) = 119906 (119896 minus 1) + Δ119906 (119896) (22)
The input constraint is expressed as follows
Uminle U le Umax
(23)
U can be expressed by ΔU as follows
[[[[[[
[
119906 (119896)
119906 (119896 + 1)
119906 (119896 + 2)
119906 (119896 + 119873
119888minus 1)
]]]]]]
]
=
[[[[[[
[
1
1
1
1
]]]]]]
]
119906 (119896 minus 1) +
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
[[[[[[
[
Δ119906 (119896)
Δ119906 (119896 + 1)
Δ119906 (119896 + 2)
Δ119906 (119896 + 119873
119888minus 1)
]]]]]]
]
(24)
Define
C1=
[[[[[[
[
1
1
1
1
]]]]]]
]
C2=
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
120595 = [minusC2
C2
] 120574 = [minusUmin
+ C1119906 (119896 minus 1)
Umaxminus C1119906 (119896 minus 1)
]
(25)
and constraint (23) can be rewritten as follows
120595ΔU le 120574 (26)
Hence the constrained optimization problem can bedescribed as
min 119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R
st 120595ΔU le 120574
(27)
which can be solved by quadratic programming (QP)method
42 The Nonlinear Fuzzy MPC Based on the T-S fuzzymodel the controller is devised via the parallel distributedcontrol (PDC) scheme [19 20] In this scheme the overallcontroller which is naturally nonlinear is a fuzzy combi-nation of each individual linear controller designed basedon the corresponding local model Here a nonlinear MPCcontroller consisting of nine local MPC controllers is con-stituted as shown in Figure 5 For each local linear modela conventional MPC controller is designed independently
Mathematical Problems in Engineering 7
Table 3 The parameters of the nine local controllers
Parameters 119894th controller1 2 3 4 5 6 7 8 9
119902 1 1 1 1 1 1 1 1 1119903 007 001 002 007 01 01 01 005 01119873119901
380 430 400 340 290 300 325 400 460119873119888
50 45 45 50 60 60 60 40 30
MPC1
MPC9
Nonlinear plant
Temperature of coolant leaving
the reactorSet point
Controller
Tl0
u(k) Tl
1205831
1205839
u1
u9
+
Figure 5 The schematic diagram of fuzzy MPC system
Consequently the final control is the weighted sum of thecontrol obtained from nine local MPC controllers Considerthe following
119906 (119896) =
9
sum
119894=1
120583119894119906119894(119896) (28)
where 119906119894(119896) is the control of the 119894th local predictive controller
and 120583119894is defined previously in (11) Since fuzzy logics dom-
inate the switching between local controllers the resultingcontrol can be smooth by properly selecting the weights 120583
119894
[10]
5 The Application to the PWR NuclearPower Plant
In using the proposed fuzzy MPC the reference temperaturefunction of power level is defined as follows
1198791198970= 290 + 2451119899
1199030 (29)
Figure 6 shows this relationshipAssume that the maximum speed of control rod is 02
fraction of core length per second Hence the constraint onthe control is considered as minus02 le 119906 le 02 which is involvedin the optimization algorithm of MPC
Define
Q = 119902 times
[[[[
[
I2times2
0 sdot sdot sdot 00 I2times2
sdot sdot sdot 0
d
0 0 sdot sdot sdot I2times2
]]]]
]119873119901times119873119901
(30)
and R = 119903 times I119873119888times119873119888
where 119902 and 119903 are the two coefficientsAssume the control rod worth119866
119903to be 00145 the parameters
of the nine local controllers are listed in Table 3
20 40 60 80 100
290
31451
Power level ()0
300
310
Tem
pera
ture
(∘C)
Tl
Figure 6 Reference temperature function of power level
The performance of the nonlinear fuzzy MPC can beevaluated in three cases
Case A Full power operation that is 100 rarr 90 rarr
100 step changes in power level Comparison of theperformance between the proposed fuzzy MPC and theconventional PID controller is presented in Figures 7(a) and7(b)The temperature and the power stabilize to their respectset points in an acceptable time whereas the nonlinear fuzzyMPC reduces the fluctuation obviously In real-time nuclearpower control inserting the control rod can slow down therelease of energy in the reactor so that the temperature andpower level are decreased while lifting the control rod speedwill raise the temperature and power level
Case B Low power operation that is 20 rarr 10 rarr 20step changes in power level Comparison of the performancebetween the proposed controller and the conventional PIDcontroller is presented in Figures 8(a) and 8(b) showingthe obvious advantage of the proposed fuzzy MPC It isnoticed that the response time is longer than that in thefull power operation and the resulting fluctuation is moresevere
In both cases the constraint on the control rod speed canbe handled by the proposed fuzzy MPC effectively while thePID controller cannot achieve it as shown in Figures 7(c) and8(c)
8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
H1=
[[[[[
[
299 times 10minus3
160 times 10minus6
914 times 10minus4
333 times 10minus5
145 times 10minus4
]]]]]
]
H4=
[[[[[
[
289 times 10minus4
200 times 10minus7
883 times 10minus5
360 times 10minus6
700 times 10minus5
]]]]]
]
H8=
[[[[[
[
120 times 10minus2
630 times 10minus6
366 times 10minus3
117 times 10minus4
290 times 10minus4
]]]]]
]
H1= H2= H6 H
3= H4= H5 H
7= H8= H9
C1= [
1 0 0 0 0
0 0 0 1 0]
C1= C2= C3= C4= C5= C6= C7= C8= C9
(8)
Table 1 The definition of the operating points
119866119903
1198991199030
01 05 100029 Point 3 Point 4 Point 500145 Point 2 Point 1 Point 600070 Point 9 Point 8 Point 7
Table 2 The constant parameters in the system matrices
120582 015 sminus1
120573 0006019119891119891
092Λ 00001 s120583119891
236MWs∘C1198751198860
25000MW
According to Table 1 power level 1198991199030and control rod worth
119866119903are selected as the premise variables 119899
1199030and119866
119903are defined
in region [0 1] and region [0 0029] respectively 1198991199030
and119866119903are divided into three fuzzy sets denoted respectively as
ldquolow (L)rdquo ldquomedium (M)rdquo and ldquohigh (H)rdquo The correspondingunivariate membership functions of 119899
1199030or 119866119903are defined
by triangle membership functions as shown in Figure 2Thus the space is divided into nine fuzzy subspaces givenas follows
119877(119894)
(119894 = 1 2 9)
IF 1199111(119896) is 119865119894
1and 119911
2(119896) is 119865119894
2
THEN x119894(119896 + 1) = G
119894x119894(119896) +H
119894119906119894(119896)
y119894(119896) = C
119894x119894(119896)
(9)
where 119877(119894) denotes the 119894th fuzzy inference rule 119911119895(119896) (119895 =
1 2) are premise variables for 1198991199030and119866
119903 119865119894119895denotes the fuzzy
set partitioned for the 119895th premise variable which is valid inthe 119894th rule (119866
119894 119867119894 119862119894) represents the consequent 119894th linear
model deduced at the 119894th equilibrium point in (7)
000
70
0145
002
90
1
1
01 05 10
0
0
Subspace 6Subspace 7Subspace 1Subspace 8
A120572
120572
LM
H
L M H
Gr
nr0
Figure 2The division of fuzzy space and the definition of univariatemembership functions
By using the center of gravity defuzzification method[10 18] the final output of the nonlinear T-S model with ninefuzzy rules is
x (119896 + 1) =9
sum
119894=1
120583119894x119894(119896 + 1) =
9
sum
119894=1
120583119894(G119894x119894(119896) +H
119894119906119894(119896))
y (119896) =9
sum
119894=1
120583119894y119894(119896) =
9
sum
119894=1
120583119894C119894x119894(119896)
(10)
where
120583119894=
120583119894
sum9
119894=1120583119894
(11)
120583119894=
2
prod
119895=1
120572119865119894
119895
(119911119895(119896)) (12)
Mathematical Problems in Engineering 5
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 3 Multivariate membership functions in the fuzzy subspace1
The 120572119865119894
119895
(119911119895(119896)) denotes the univariate membership func-
tion of premise variable 119911119895(119896) with respect to the fuzzy set
119865119894
119895 120583119894is the multivariate membership function obtained by
the product of the outputs of the two univariate membershipfunctions as shown in Figure 3
Four rules are activated each time instant At point A inFigure 2 these four rules are as follows
1198771 if 119866
119903(119896) is119872 and 119899
1199030(119896) is 119872
thenx1(119896 + 1) = G
1x1(119896) +H
11199061(119896)
y1(119896) = C
1x1(119896)
1198776 if 119866
119903(119896) is119872 and 119899
1199030(119896) is119867
thenx6(119896 + 1) = G
6x6(119896) +H
61199066(119896)
y6(119896) = C
6x6(119896)
1198777 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119867
thenx7(119896 + 1) = G
7x7(119896) +H
71199067(119896)
y7(119896) = C
7x7(119896)
1198778 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119872
thenx8(119896 + 1) = G
8x8(119896) +H
81199068(119896)
y8(119896) = C
8x8(119896)
The membership functions are shown in Figure 4
4 The Nonlinear Fuzzy MPC
41 The Local Linear MPC The local linear model (7) can beexpressed as follows
x (119896) = Gx (119896 minus 1) +H119906 (119896 minus 1)
y (119896 minus 1) = Cx (119896 minus 1) (13)
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 4 Multivariate membership functions activated at point A
Subtracting (13) from (7) can result in
Δx (119896 + 1) = GΔx (119896) +HΔ119906 (119896)
Δy (119896) = CΔx (119896) (14)
where Δx(119896) = x(119896) minus x(119896 minus 1) Δ119906(119896) = 119906(119896) minus 119906(119896 minus 1) andΔy(119896) = y(119896) minus y(119896 minus 1)
Hence Δy(119896 + 1) = CΔx(119896 + 1) = CGΔx(119896) + CHΔ119906(119896)Choosing a new state variable vector x1015840(119896) =
[Δx(119896)119879 y(119896)119879]119879 can result in
[Δx (119896 + 1)y (119896 + 1) ] = [
G 0CG I] [
Δx (119896)y (119896) ] + [
HCH]Δ119906 (119896)
y (119896) = [0 I] [Δx (119896)y (119896) ]
(15)
Denote (15) as the following normal form
x1015840 (119896 + 1) = G1015840x1015840 (119896) +H1015840119906 (119896)
y (119896) = C1015840x1015840 (119896) (16)
where x1015840(119896) isin 1198771198991015840
(1198991015840
= 119899 + 119901) G1015840 = [ G 0CG I ] H
1015840
= [ HCH ] and
C1015840 = [0 I] 119899 and 119901 are respectively the number of the statevariables and the output variables
The predictive control is obtained by minimizing thefollowing cost function
119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R (17)
The control is obtained by minimizing the cost functionat each time instant 119896
Define
Y = [y(119896 + 1 | 119896)119879y(119896 + 2 | 119896)119879 sdot sdot sdot y(119896 + 119873119875| 119896)119879
]119879
r119904= [r(119896 + 1)119879r(119896 + 2)119879 sdot sdot sdot r(119896 + 119873
119875)119879
]119879
ΔU = [Δ119906 (119896) Δ119906 (119896 + 1) sdot sdot sdot Δ119906 (119896 + 119873119888minus 1)]119879
6 Mathematical Problems in Engineering
Q =
[[[[
[
Q (1) 0 sdot sdot sdot 0
0 Q (2) sdot sdot sdot 0
d
0 0 sdot sdot sdot Q (119873
119901)
]]]]
]
R =[[[[
[
R (0) 0 sdot sdot sdot 0
0 R (1) sdot sdot sdot 0
d
0 0 sdot sdot sdot R (119873
119888minus 1)
]]]]
]
(18)
where Q and R are the weighting matrices for the pre-diction error and the control respectively 119873
119901and 119873
119888are
respectively the costing horizon for the prediction errorand the control and y(119896 + 119895 | 119896)
119879 and r(119896 + 119895)119879 (119895 =
1 2 119873119901) are the optimum 119895th step ahead prediction of
the system output on data up to time instant 119896 and the119895th step ahead reference trajectory respectively ΔU is thevector composed of the future control increments whichis obtained by computing the derivative of 119869 expressed asfollows
ΔU = (R +Φ119879QΦ)minus1
Φ119879Q (r119904minus Fx (119896)) (19)
where
F =
[[[[[[[
[
C1015840G1015840
C1015840G10158402
C1015840G10158403
C1015840G1015840119873119901
]]]]]]]
]
Φ =
[[[[[[[
[
C1015840H1015840 0 0 sdot sdot sdot 0C1015840G1015840H1015840 C1015840H1015840 0 sdot sdot sdot 0C1015840G10158402H1015840 C1015840G1015840H1015840 C1015840H1015840 sdot sdot sdot 0
d
C1015840G1015840119873119901minus1H1015840 C1015840G1015840119873119901minus2H1015840 C1015840G1015840119873119901minus3H1015840 sdot sdot sdot C1015840G1015840119873119901minus119873119888H1015840
]]]]]]]
]
(20)
The optimized 119873119888steps ahead control ΔU is computed
and only the first step ahead control Δ119906(119896) is implementedusing a receding horizon principle [10] giving
Δ119906 (119896) = [1 0 sdot sdot sdot 0]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119873119888
ΔU (21)
further 119906(119896) can be obtained by
119906 (119896) = 119906 (119896 minus 1) + Δ119906 (119896) (22)
The input constraint is expressed as follows
Uminle U le Umax
(23)
U can be expressed by ΔU as follows
[[[[[[
[
119906 (119896)
119906 (119896 + 1)
119906 (119896 + 2)
119906 (119896 + 119873
119888minus 1)
]]]]]]
]
=
[[[[[[
[
1
1
1
1
]]]]]]
]
119906 (119896 minus 1) +
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
[[[[[[
[
Δ119906 (119896)
Δ119906 (119896 + 1)
Δ119906 (119896 + 2)
Δ119906 (119896 + 119873
119888minus 1)
]]]]]]
]
(24)
Define
C1=
[[[[[[
[
1
1
1
1
]]]]]]
]
C2=
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
120595 = [minusC2
C2
] 120574 = [minusUmin
+ C1119906 (119896 minus 1)
Umaxminus C1119906 (119896 minus 1)
]
(25)
and constraint (23) can be rewritten as follows
120595ΔU le 120574 (26)
Hence the constrained optimization problem can bedescribed as
min 119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R
st 120595ΔU le 120574
(27)
which can be solved by quadratic programming (QP)method
42 The Nonlinear Fuzzy MPC Based on the T-S fuzzymodel the controller is devised via the parallel distributedcontrol (PDC) scheme [19 20] In this scheme the overallcontroller which is naturally nonlinear is a fuzzy combi-nation of each individual linear controller designed basedon the corresponding local model Here a nonlinear MPCcontroller consisting of nine local MPC controllers is con-stituted as shown in Figure 5 For each local linear modela conventional MPC controller is designed independently
Mathematical Problems in Engineering 7
Table 3 The parameters of the nine local controllers
Parameters 119894th controller1 2 3 4 5 6 7 8 9
119902 1 1 1 1 1 1 1 1 1119903 007 001 002 007 01 01 01 005 01119873119901
380 430 400 340 290 300 325 400 460119873119888
50 45 45 50 60 60 60 40 30
MPC1
MPC9
Nonlinear plant
Temperature of coolant leaving
the reactorSet point
Controller
Tl0
u(k) Tl
1205831
1205839
u1
u9
+
Figure 5 The schematic diagram of fuzzy MPC system
Consequently the final control is the weighted sum of thecontrol obtained from nine local MPC controllers Considerthe following
119906 (119896) =
9
sum
119894=1
120583119894119906119894(119896) (28)
where 119906119894(119896) is the control of the 119894th local predictive controller
and 120583119894is defined previously in (11) Since fuzzy logics dom-
inate the switching between local controllers the resultingcontrol can be smooth by properly selecting the weights 120583
119894
[10]
5 The Application to the PWR NuclearPower Plant
In using the proposed fuzzy MPC the reference temperaturefunction of power level is defined as follows
1198791198970= 290 + 2451119899
1199030 (29)
Figure 6 shows this relationshipAssume that the maximum speed of control rod is 02
fraction of core length per second Hence the constraint onthe control is considered as minus02 le 119906 le 02 which is involvedin the optimization algorithm of MPC
Define
Q = 119902 times
[[[[
[
I2times2
0 sdot sdot sdot 00 I2times2
sdot sdot sdot 0
d
0 0 sdot sdot sdot I2times2
]]]]
]119873119901times119873119901
(30)
and R = 119903 times I119873119888times119873119888
where 119902 and 119903 are the two coefficientsAssume the control rod worth119866
119903to be 00145 the parameters
of the nine local controllers are listed in Table 3
20 40 60 80 100
290
31451
Power level ()0
300
310
Tem
pera
ture
(∘C)
Tl
Figure 6 Reference temperature function of power level
The performance of the nonlinear fuzzy MPC can beevaluated in three cases
Case A Full power operation that is 100 rarr 90 rarr
100 step changes in power level Comparison of theperformance between the proposed fuzzy MPC and theconventional PID controller is presented in Figures 7(a) and7(b)The temperature and the power stabilize to their respectset points in an acceptable time whereas the nonlinear fuzzyMPC reduces the fluctuation obviously In real-time nuclearpower control inserting the control rod can slow down therelease of energy in the reactor so that the temperature andpower level are decreased while lifting the control rod speedwill raise the temperature and power level
Case B Low power operation that is 20 rarr 10 rarr 20step changes in power level Comparison of the performancebetween the proposed controller and the conventional PIDcontroller is presented in Figures 8(a) and 8(b) showingthe obvious advantage of the proposed fuzzy MPC It isnoticed that the response time is longer than that in thefull power operation and the resulting fluctuation is moresevere
In both cases the constraint on the control rod speed canbe handled by the proposed fuzzy MPC effectively while thePID controller cannot achieve it as shown in Figures 7(c) and8(c)
8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 3 Multivariate membership functions in the fuzzy subspace1
The 120572119865119894
119895
(119911119895(119896)) denotes the univariate membership func-
tion of premise variable 119911119895(119896) with respect to the fuzzy set
119865119894
119895 120583119894is the multivariate membership function obtained by
the product of the outputs of the two univariate membershipfunctions as shown in Figure 3
Four rules are activated each time instant At point A inFigure 2 these four rules are as follows
1198771 if 119866
119903(119896) is119872 and 119899
1199030(119896) is 119872
thenx1(119896 + 1) = G
1x1(119896) +H
11199061(119896)
y1(119896) = C
1x1(119896)
1198776 if 119866
119903(119896) is119872 and 119899
1199030(119896) is119867
thenx6(119896 + 1) = G
6x6(119896) +H
61199066(119896)
y6(119896) = C
6x6(119896)
1198777 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119867
thenx7(119896 + 1) = G
7x7(119896) +H
71199067(119896)
y7(119896) = C
7x7(119896)
1198778 if 119866
119903(119896) is119867 and 119899
1199030(119896) is119872
thenx8(119896 + 1) = G
8x8(119896) +H
81199068(119896)
y8(119896) = C
8x8(119896)
The membership functions are shown in Figure 4
4 The Nonlinear Fuzzy MPC
41 The Local Linear MPC The local linear model (7) can beexpressed as follows
x (119896) = Gx (119896 minus 1) +H119906 (119896 minus 1)
y (119896 minus 1) = Cx (119896 minus 1) (13)
0
1
00005001001500200250030
080907060504030201
08 0907060504030201
1
Gr nr0
Figure 4 Multivariate membership functions activated at point A
Subtracting (13) from (7) can result in
Δx (119896 + 1) = GΔx (119896) +HΔ119906 (119896)
Δy (119896) = CΔx (119896) (14)
where Δx(119896) = x(119896) minus x(119896 minus 1) Δ119906(119896) = 119906(119896) minus 119906(119896 minus 1) andΔy(119896) = y(119896) minus y(119896 minus 1)
Hence Δy(119896 + 1) = CΔx(119896 + 1) = CGΔx(119896) + CHΔ119906(119896)Choosing a new state variable vector x1015840(119896) =
[Δx(119896)119879 y(119896)119879]119879 can result in
[Δx (119896 + 1)y (119896 + 1) ] = [
G 0CG I] [
Δx (119896)y (119896) ] + [
HCH]Δ119906 (119896)
y (119896) = [0 I] [Δx (119896)y (119896) ]
(15)
Denote (15) as the following normal form
x1015840 (119896 + 1) = G1015840x1015840 (119896) +H1015840119906 (119896)
y (119896) = C1015840x1015840 (119896) (16)
where x1015840(119896) isin 1198771198991015840
(1198991015840
= 119899 + 119901) G1015840 = [ G 0CG I ] H
1015840
= [ HCH ] and
C1015840 = [0 I] 119899 and 119901 are respectively the number of the statevariables and the output variables
The predictive control is obtained by minimizing thefollowing cost function
119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R (17)
The control is obtained by minimizing the cost functionat each time instant 119896
Define
Y = [y(119896 + 1 | 119896)119879y(119896 + 2 | 119896)119879 sdot sdot sdot y(119896 + 119873119875| 119896)119879
]119879
r119904= [r(119896 + 1)119879r(119896 + 2)119879 sdot sdot sdot r(119896 + 119873
119875)119879
]119879
ΔU = [Δ119906 (119896) Δ119906 (119896 + 1) sdot sdot sdot Δ119906 (119896 + 119873119888minus 1)]119879
6 Mathematical Problems in Engineering
Q =
[[[[
[
Q (1) 0 sdot sdot sdot 0
0 Q (2) sdot sdot sdot 0
d
0 0 sdot sdot sdot Q (119873
119901)
]]]]
]
R =[[[[
[
R (0) 0 sdot sdot sdot 0
0 R (1) sdot sdot sdot 0
d
0 0 sdot sdot sdot R (119873
119888minus 1)
]]]]
]
(18)
where Q and R are the weighting matrices for the pre-diction error and the control respectively 119873
119901and 119873
119888are
respectively the costing horizon for the prediction errorand the control and y(119896 + 119895 | 119896)
119879 and r(119896 + 119895)119879 (119895 =
1 2 119873119901) are the optimum 119895th step ahead prediction of
the system output on data up to time instant 119896 and the119895th step ahead reference trajectory respectively ΔU is thevector composed of the future control increments whichis obtained by computing the derivative of 119869 expressed asfollows
ΔU = (R +Φ119879QΦ)minus1
Φ119879Q (r119904minus Fx (119896)) (19)
where
F =
[[[[[[[
[
C1015840G1015840
C1015840G10158402
C1015840G10158403
C1015840G1015840119873119901
]]]]]]]
]
Φ =
[[[[[[[
[
C1015840H1015840 0 0 sdot sdot sdot 0C1015840G1015840H1015840 C1015840H1015840 0 sdot sdot sdot 0C1015840G10158402H1015840 C1015840G1015840H1015840 C1015840H1015840 sdot sdot sdot 0
d
C1015840G1015840119873119901minus1H1015840 C1015840G1015840119873119901minus2H1015840 C1015840G1015840119873119901minus3H1015840 sdot sdot sdot C1015840G1015840119873119901minus119873119888H1015840
]]]]]]]
]
(20)
The optimized 119873119888steps ahead control ΔU is computed
and only the first step ahead control Δ119906(119896) is implementedusing a receding horizon principle [10] giving
Δ119906 (119896) = [1 0 sdot sdot sdot 0]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119873119888
ΔU (21)
further 119906(119896) can be obtained by
119906 (119896) = 119906 (119896 minus 1) + Δ119906 (119896) (22)
The input constraint is expressed as follows
Uminle U le Umax
(23)
U can be expressed by ΔU as follows
[[[[[[
[
119906 (119896)
119906 (119896 + 1)
119906 (119896 + 2)
119906 (119896 + 119873
119888minus 1)
]]]]]]
]
=
[[[[[[
[
1
1
1
1
]]]]]]
]
119906 (119896 minus 1) +
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
[[[[[[
[
Δ119906 (119896)
Δ119906 (119896 + 1)
Δ119906 (119896 + 2)
Δ119906 (119896 + 119873
119888minus 1)
]]]]]]
]
(24)
Define
C1=
[[[[[[
[
1
1
1
1
]]]]]]
]
C2=
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
120595 = [minusC2
C2
] 120574 = [minusUmin
+ C1119906 (119896 minus 1)
Umaxminus C1119906 (119896 minus 1)
]
(25)
and constraint (23) can be rewritten as follows
120595ΔU le 120574 (26)
Hence the constrained optimization problem can bedescribed as
min 119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R
st 120595ΔU le 120574
(27)
which can be solved by quadratic programming (QP)method
42 The Nonlinear Fuzzy MPC Based on the T-S fuzzymodel the controller is devised via the parallel distributedcontrol (PDC) scheme [19 20] In this scheme the overallcontroller which is naturally nonlinear is a fuzzy combi-nation of each individual linear controller designed basedon the corresponding local model Here a nonlinear MPCcontroller consisting of nine local MPC controllers is con-stituted as shown in Figure 5 For each local linear modela conventional MPC controller is designed independently
Mathematical Problems in Engineering 7
Table 3 The parameters of the nine local controllers
Parameters 119894th controller1 2 3 4 5 6 7 8 9
119902 1 1 1 1 1 1 1 1 1119903 007 001 002 007 01 01 01 005 01119873119901
380 430 400 340 290 300 325 400 460119873119888
50 45 45 50 60 60 60 40 30
MPC1
MPC9
Nonlinear plant
Temperature of coolant leaving
the reactorSet point
Controller
Tl0
u(k) Tl
1205831
1205839
u1
u9
+
Figure 5 The schematic diagram of fuzzy MPC system
Consequently the final control is the weighted sum of thecontrol obtained from nine local MPC controllers Considerthe following
119906 (119896) =
9
sum
119894=1
120583119894119906119894(119896) (28)
where 119906119894(119896) is the control of the 119894th local predictive controller
and 120583119894is defined previously in (11) Since fuzzy logics dom-
inate the switching between local controllers the resultingcontrol can be smooth by properly selecting the weights 120583
119894
[10]
5 The Application to the PWR NuclearPower Plant
In using the proposed fuzzy MPC the reference temperaturefunction of power level is defined as follows
1198791198970= 290 + 2451119899
1199030 (29)
Figure 6 shows this relationshipAssume that the maximum speed of control rod is 02
fraction of core length per second Hence the constraint onthe control is considered as minus02 le 119906 le 02 which is involvedin the optimization algorithm of MPC
Define
Q = 119902 times
[[[[
[
I2times2
0 sdot sdot sdot 00 I2times2
sdot sdot sdot 0
d
0 0 sdot sdot sdot I2times2
]]]]
]119873119901times119873119901
(30)
and R = 119903 times I119873119888times119873119888
where 119902 and 119903 are the two coefficientsAssume the control rod worth119866
119903to be 00145 the parameters
of the nine local controllers are listed in Table 3
20 40 60 80 100
290
31451
Power level ()0
300
310
Tem
pera
ture
(∘C)
Tl
Figure 6 Reference temperature function of power level
The performance of the nonlinear fuzzy MPC can beevaluated in three cases
Case A Full power operation that is 100 rarr 90 rarr
100 step changes in power level Comparison of theperformance between the proposed fuzzy MPC and theconventional PID controller is presented in Figures 7(a) and7(b)The temperature and the power stabilize to their respectset points in an acceptable time whereas the nonlinear fuzzyMPC reduces the fluctuation obviously In real-time nuclearpower control inserting the control rod can slow down therelease of energy in the reactor so that the temperature andpower level are decreased while lifting the control rod speedwill raise the temperature and power level
Case B Low power operation that is 20 rarr 10 rarr 20step changes in power level Comparison of the performancebetween the proposed controller and the conventional PIDcontroller is presented in Figures 8(a) and 8(b) showingthe obvious advantage of the proposed fuzzy MPC It isnoticed that the response time is longer than that in thefull power operation and the resulting fluctuation is moresevere
In both cases the constraint on the control rod speed canbe handled by the proposed fuzzy MPC effectively while thePID controller cannot achieve it as shown in Figures 7(c) and8(c)
8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Q =
[[[[
[
Q (1) 0 sdot sdot sdot 0
0 Q (2) sdot sdot sdot 0
d
0 0 sdot sdot sdot Q (119873
119901)
]]]]
]
R =[[[[
[
R (0) 0 sdot sdot sdot 0
0 R (1) sdot sdot sdot 0
d
0 0 sdot sdot sdot R (119873
119888minus 1)
]]]]
]
(18)
where Q and R are the weighting matrices for the pre-diction error and the control respectively 119873
119901and 119873
119888are
respectively the costing horizon for the prediction errorand the control and y(119896 + 119895 | 119896)
119879 and r(119896 + 119895)119879 (119895 =
1 2 119873119901) are the optimum 119895th step ahead prediction of
the system output on data up to time instant 119896 and the119895th step ahead reference trajectory respectively ΔU is thevector composed of the future control increments whichis obtained by computing the derivative of 119869 expressed asfollows
ΔU = (R +Φ119879QΦ)minus1
Φ119879Q (r119904minus Fx (119896)) (19)
where
F =
[[[[[[[
[
C1015840G1015840
C1015840G10158402
C1015840G10158403
C1015840G1015840119873119901
]]]]]]]
]
Φ =
[[[[[[[
[
C1015840H1015840 0 0 sdot sdot sdot 0C1015840G1015840H1015840 C1015840H1015840 0 sdot sdot sdot 0C1015840G10158402H1015840 C1015840G1015840H1015840 C1015840H1015840 sdot sdot sdot 0
d
C1015840G1015840119873119901minus1H1015840 C1015840G1015840119873119901minus2H1015840 C1015840G1015840119873119901minus3H1015840 sdot sdot sdot C1015840G1015840119873119901minus119873119888H1015840
]]]]]]]
]
(20)
The optimized 119873119888steps ahead control ΔU is computed
and only the first step ahead control Δ119906(119896) is implementedusing a receding horizon principle [10] giving
Δ119906 (119896) = [1 0 sdot sdot sdot 0]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119873119888
ΔU (21)
further 119906(119896) can be obtained by
119906 (119896) = 119906 (119896 minus 1) + Δ119906 (119896) (22)
The input constraint is expressed as follows
Uminle U le Umax
(23)
U can be expressed by ΔU as follows
[[[[[[
[
119906 (119896)
119906 (119896 + 1)
119906 (119896 + 2)
119906 (119896 + 119873
119888minus 1)
]]]]]]
]
=
[[[[[[
[
1
1
1
1
]]]]]]
]
119906 (119896 minus 1) +
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
[[[[[[
[
Δ119906 (119896)
Δ119906 (119896 + 1)
Δ119906 (119896 + 2)
Δ119906 (119896 + 119873
119888minus 1)
]]]]]]
]
(24)
Define
C1=
[[[[[[
[
1
1
1
1
]]]]]]
]
C2=
[[[[[[
[
1 0 0 sdot sdot sdot 0
1 1 0 sdot sdot sdot 0
1 1 1 sdot sdot sdot 0
d
1 1 1 sdot sdot sdot 1
]]]]]]
]
120595 = [minusC2
C2
] 120574 = [minusUmin
+ C1119906 (119896 minus 1)
Umaxminus C1119906 (119896 minus 1)
]
(25)
and constraint (23) can be rewritten as follows
120595ΔU le 120574 (26)
Hence the constrained optimization problem can bedescribed as
min 119869 =1003817100381710038171003817Y minus r
119904
10038171003817100381710038172
Q + ΔU2
R
st 120595ΔU le 120574
(27)
which can be solved by quadratic programming (QP)method
42 The Nonlinear Fuzzy MPC Based on the T-S fuzzymodel the controller is devised via the parallel distributedcontrol (PDC) scheme [19 20] In this scheme the overallcontroller which is naturally nonlinear is a fuzzy combi-nation of each individual linear controller designed basedon the corresponding local model Here a nonlinear MPCcontroller consisting of nine local MPC controllers is con-stituted as shown in Figure 5 For each local linear modela conventional MPC controller is designed independently
Mathematical Problems in Engineering 7
Table 3 The parameters of the nine local controllers
Parameters 119894th controller1 2 3 4 5 6 7 8 9
119902 1 1 1 1 1 1 1 1 1119903 007 001 002 007 01 01 01 005 01119873119901
380 430 400 340 290 300 325 400 460119873119888
50 45 45 50 60 60 60 40 30
MPC1
MPC9
Nonlinear plant
Temperature of coolant leaving
the reactorSet point
Controller
Tl0
u(k) Tl
1205831
1205839
u1
u9
+
Figure 5 The schematic diagram of fuzzy MPC system
Consequently the final control is the weighted sum of thecontrol obtained from nine local MPC controllers Considerthe following
119906 (119896) =
9
sum
119894=1
120583119894119906119894(119896) (28)
where 119906119894(119896) is the control of the 119894th local predictive controller
and 120583119894is defined previously in (11) Since fuzzy logics dom-
inate the switching between local controllers the resultingcontrol can be smooth by properly selecting the weights 120583
119894
[10]
5 The Application to the PWR NuclearPower Plant
In using the proposed fuzzy MPC the reference temperaturefunction of power level is defined as follows
1198791198970= 290 + 2451119899
1199030 (29)
Figure 6 shows this relationshipAssume that the maximum speed of control rod is 02
fraction of core length per second Hence the constraint onthe control is considered as minus02 le 119906 le 02 which is involvedin the optimization algorithm of MPC
Define
Q = 119902 times
[[[[
[
I2times2
0 sdot sdot sdot 00 I2times2
sdot sdot sdot 0
d
0 0 sdot sdot sdot I2times2
]]]]
]119873119901times119873119901
(30)
and R = 119903 times I119873119888times119873119888
where 119902 and 119903 are the two coefficientsAssume the control rod worth119866
119903to be 00145 the parameters
of the nine local controllers are listed in Table 3
20 40 60 80 100
290
31451
Power level ()0
300
310
Tem
pera
ture
(∘C)
Tl
Figure 6 Reference temperature function of power level
The performance of the nonlinear fuzzy MPC can beevaluated in three cases
Case A Full power operation that is 100 rarr 90 rarr
100 step changes in power level Comparison of theperformance between the proposed fuzzy MPC and theconventional PID controller is presented in Figures 7(a) and7(b)The temperature and the power stabilize to their respectset points in an acceptable time whereas the nonlinear fuzzyMPC reduces the fluctuation obviously In real-time nuclearpower control inserting the control rod can slow down therelease of energy in the reactor so that the temperature andpower level are decreased while lifting the control rod speedwill raise the temperature and power level
Case B Low power operation that is 20 rarr 10 rarr 20step changes in power level Comparison of the performancebetween the proposed controller and the conventional PIDcontroller is presented in Figures 8(a) and 8(b) showingthe obvious advantage of the proposed fuzzy MPC It isnoticed that the response time is longer than that in thefull power operation and the resulting fluctuation is moresevere
In both cases the constraint on the control rod speed canbe handled by the proposed fuzzy MPC effectively while thePID controller cannot achieve it as shown in Figures 7(c) and8(c)
8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 3 The parameters of the nine local controllers
Parameters 119894th controller1 2 3 4 5 6 7 8 9
119902 1 1 1 1 1 1 1 1 1119903 007 001 002 007 01 01 01 005 01119873119901
380 430 400 340 290 300 325 400 460119873119888
50 45 45 50 60 60 60 40 30
MPC1
MPC9
Nonlinear plant
Temperature of coolant leaving
the reactorSet point
Controller
Tl0
u(k) Tl
1205831
1205839
u1
u9
+
Figure 5 The schematic diagram of fuzzy MPC system
Consequently the final control is the weighted sum of thecontrol obtained from nine local MPC controllers Considerthe following
119906 (119896) =
9
sum
119894=1
120583119894119906119894(119896) (28)
where 119906119894(119896) is the control of the 119894th local predictive controller
and 120583119894is defined previously in (11) Since fuzzy logics dom-
inate the switching between local controllers the resultingcontrol can be smooth by properly selecting the weights 120583
119894
[10]
5 The Application to the PWR NuclearPower Plant
In using the proposed fuzzy MPC the reference temperaturefunction of power level is defined as follows
1198791198970= 290 + 2451119899
1199030 (29)
Figure 6 shows this relationshipAssume that the maximum speed of control rod is 02
fraction of core length per second Hence the constraint onthe control is considered as minus02 le 119906 le 02 which is involvedin the optimization algorithm of MPC
Define
Q = 119902 times
[[[[
[
I2times2
0 sdot sdot sdot 00 I2times2
sdot sdot sdot 0
d
0 0 sdot sdot sdot I2times2
]]]]
]119873119901times119873119901
(30)
and R = 119903 times I119873119888times119873119888
where 119902 and 119903 are the two coefficientsAssume the control rod worth119866
119903to be 00145 the parameters
of the nine local controllers are listed in Table 3
20 40 60 80 100
290
31451
Power level ()0
300
310
Tem
pera
ture
(∘C)
Tl
Figure 6 Reference temperature function of power level
The performance of the nonlinear fuzzy MPC can beevaluated in three cases
Case A Full power operation that is 100 rarr 90 rarr
100 step changes in power level Comparison of theperformance between the proposed fuzzy MPC and theconventional PID controller is presented in Figures 7(a) and7(b)The temperature and the power stabilize to their respectset points in an acceptable time whereas the nonlinear fuzzyMPC reduces the fluctuation obviously In real-time nuclearpower control inserting the control rod can slow down therelease of energy in the reactor so that the temperature andpower level are decreased while lifting the control rod speedwill raise the temperature and power level
Case B Low power operation that is 20 rarr 10 rarr 20step changes in power level Comparison of the performancebetween the proposed controller and the conventional PIDcontroller is presented in Figures 8(a) and 8(b) showingthe obvious advantage of the proposed fuzzy MPC It isnoticed that the response time is longer than that in thefull power operation and the resulting fluctuation is moresevere
In both cases the constraint on the control rod speed canbe handled by the proposed fuzzy MPC effectively while thePID controller cannot achieve it as shown in Figures 7(c) and8(c)
8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
24 30 36 42 48 54 60 66 723115
312
3125
313
3135
314
3145
315
Time (s)
Coo
lant
tem
pera
ture
Nonlinear fuzzy MPCPID
Reference trajectory
(a)
24 30 36 42 48 54 60 66 72088
09
092
094
096
098
1
102
Pow
er le
vel
Reference trajectoryNonlinear fuzzy MPC
PID
Time (s)
(b)
Nonlinear fuzzy MPCPID
24 30 36 42 48 54 60 66 72
002040608
Con
trol r
od sp
eed
Time (s)
minus02
minus04
minus06
minus08
(c)
Figure 7 Comparison of the performance between the nonlinearfuzzy MPC and the conventional PID controller (100 rarr 90 rarr
100 power level change) (a) coolant temperature (unit ∘C) (b)power level and (c) control rod speed
Case C Wide-range load following that is 100 rarr
10 rarr 100 ramp changes in power level with 5minrate as shown in Figure 9 With the constraint handlingon the control rod speed by the fuzzy MPC satisfactorytracking performance is obtained for both temperature andpower
24 30 36 42 48 54 60 66 72292
2925
293
2935
294
2945
295
2955
Coo
lant
tem
pera
ture
Time (s)
Reference trajectory Nonlinear fuzzy MPCPID
(a)
30 36 42 48 54 60 66 72008
01
012
014
016
018
02
022
Time (s)
Pow
er le
vel
Nonlinear fuzzy MPCPID
Reference trajectory
(b)
Time (s)24 30 36 42 48 54 60 66 72
004081216
2
Con
trol r
od sp
eed
Nonlinear fuzzy MPCPID
minus08
minus04
minus12
minus16
minus2
(c)
Figure 8 Comparison of the performance between the nonlinearfuzzy controller and the conventional PID controller (20 rarr
10 rarr 20 power level change) (a) coolant temperature (unit∘C) (b) power level and (c) control rod speed
6 Conclusions
The paper constituted a nonlinear MPC controller by incor-porating fuzzy modeling technique Feasible optimal solu-tions have been acquired under plant nonlinearity andconstraints The proposed nonlinear fuzzy MPC is simulatedin power and temperature control for a three-mile island-
Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
0 12 24 36 48 60 72290
295
300
305
310
315
Time (s)
Coo
lant
tem
pera
ture
Reference trajectoryCoolant temperature
(a)
Time (s)0 12 24 36 48 60 72
010203040506070809
111
Pow
er le
vel
Reference trajectoryPower level
(b)
Time (s)0 12 24 36 48 60 72
0005
01015
02
Con
trol r
od sp
eed
minus02
minus015
minus01
minus005
(c)
Figure 9 The performance for the nonlinear fuzzy controller(100 rarr 10 rarr 100 ramp changes in power level with 5minrate) (a) coolant temperature (unit∘C) (b) power level and (c)control rod speed
(TMI-) type PWR Better performance is obtained whileit is compared with the PID controller Load following isaccomplished under constraints on the control rod
Nomenclature
119899119903 Neutron density relative to density at ratedcondition
119888119903 Precursor density relative to density at ratedcondition
120575120588 Reactivity120575120588119903 Reactivity due to the control rod
120573 Fraction of delayed fission neutronsΛ Effective prompt neutron lifetime120582 Effective precursor density119879119891 Average reactor fuel temperature
119891119891 Fraction of reactor power deposited in fuel
120583119891 Heat capacity of the fuel
1198751198860 Rated power level
Ω Heat transfer coefficient between fuel andcoolant
119879119897 The temperature of coolant leaving the
reactor119879119890 The temperature of coolant entering the
reactor120583119888 Heat capacity of the coolant
119872 Mass flow rate times heat capacity of thewater
119866119903 Total reactivity worth of the rod
119911119903 The control rod speed (fraction of core
length per second)120572119891 Fuel temperature reactivity coefficient
120572119888 Coolant temperature reactivity coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China under Grants nos 60974051 and 61273144and by Natural Science Foundation of Beijing under Grantno 4122071
References
[1] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1992
[2] R M Edwards K Y Lee and M A Schultz ldquoState feedbackassisted classical control an incremental approach to controlmodernization of existing and future nuclear reactors andpower plantsrdquo Nuclear Technology vol 92 no 2 pp 167ndash1851990
[3] H Arab-Alibeik and S Setayeshi ldquoImproved temperature con-trol of a PWRnuclear reactor using an LQGLTR based control-lerrdquo IEEE Transactions on Nuclear Science vol 50 no 1 pp 211ndash218 2003
[4] A Ben-Abdennour R M Edwards and K Y Lee ldquoLQGLTRrobust control of nuclear reactors with improved temperatureperformancerdquo IEEE Transactions on Nuclear Science vol 39 no6 pp 2286ndash2294 1992
[5] Z Dong J Feng and X Huang ldquoNonlinear observer-basedfeedback dissipation load-following control for nuclear reac-torsrdquo IEEE Transactions on Nuclear Science vol 56 no 1 pp272ndash285 2009
10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
[6] H Eliasi M B Menhaj and H Davilu ldquoRobust nonlinearmodel predictive control for a PWR nuclear power plantrdquoProgress in Nuclear Energy vol 54 no 1 pp 177ndash185 2012
[7] C-C Ku K Y Lee and R M Edwards ldquoImproved nuclearreactor temperature control using diagonal recurrent neuralnetworksrdquo IEEE Transactions on Nuclear Science vol 39 no 6pp 2298ndash2308 1992
[8] P Ramaswamy R M Edwards and K Y Lee ldquoFuzzy logiccontroller for nuclear power plantrdquo in Proceedings of the 2ndInternational Forum on Applications of Neural Networks toPower Systems (ANNP rsquo93) pp 29ndash34 Yokohama Japan 1993
[9] X J Liu P Guan and C W Chan ldquoNonlinear multivari-able power plant coordinate control by constrained predictiveschemerdquo IEEE Transactions on Control Systems Technology vol18 no 5 pp 1116ndash1125 2010
[10] X-J Liu and C W Chan ldquoNeuro-fuzzy generalized predictivecontrol of boiler steam temperaturerdquo IEEE Transactions onEnergy Conversion vol 21 no 4 pp 900ndash908 2006
[11] X J Liu and X B Kong ldquoNonlinear fuzzy model predictiveiterative learning control for drum-type boiler-turbine systemrdquoJournal of Process Control vol 23 no 8 pp 1023ndash1040 2013
[12] M G Na ldquoAuto-tuned PID controller using a model predictivecontrol method for the steam generator water levelrdquo IEEETransactions on Nuclear Science vol 48 no 5 pp 1664ndash16712001
[13] M G Na Y R Sim and Y J Lee ldquoDesign of an adaptivepredictive controller for steam generatorsrdquo IEEE Transactionson Nuclear Science vol 50 no 2 pp 186ndash193 2003
[14] M V Kothare B Mettler M Morari P Bendotti and C-MFalinower ldquoLevel control in the steam generator of a nuclearpower plantrdquo IEEE Transactions on Control Systems Technologyvol 8 no 1 pp 55ndash69 2000
[15] M G Na I J Hwang and Y J Lee ldquoDesign of a fuzzy modelpredictive power controller for pressurized water reactorsrdquoIEEE Transactions on Nuclear Science vol 53 no 3 pp 1504ndash1514 2006
[16] M G Na S H Shin and W C Kim ldquoA model predictivecontroller for nuclear reactor powerrdquo Journal of the KoreanNuclear Society vol 35 no 5 pp 399ndash411 2003
[17] R M Edwards K Y Lee and A Ray ldquoRobust optimal controlof nuclear reactors and power plantsrdquo Nuclear Technology vol98 no 2 pp 137ndash148 1991
[18] J Shi J Wang and YWang ldquoT-S fuzzymodeling for predictingchaotic time series based on unscented Kalman filter approachrdquoin Proceedings of the 8th International Conference on FuzzySystems and Knowledge Discovery (FSKD rsquo11) pp 722ndash726Shanghai China July 2011
[19] Z Zhang and Z Sun ldquoT-S fuzzy model in discrete form andits application to identification of a plane manipulator with twodegree of freedomrdquo in Proceedings of the IEEE InternationalConference on Intelligent Processing Systems (ICIPS rsquo97) vol 1pp 368ndash372 Beijing China October 1997
[20] X Luan A Young W Han and Y Zhai ldquoLoad-followingcontrol of nuclear reactors based on Takagi-Sugeno fuzzymodelrdquo in Proceedings of the 18th IFAC World Congress pp8253ndash8258 Milano Italy September 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of