Research Article Efficient Underwater RSS Value to Distance...
9
Research Article Efficient Underwater RSS Value to Distance Inversion Using the Lambert Function Majid Hosseini, 1 Hassan Chizari, 2 Tim Poston, 3 Mazleena Bt. Salleh, 2 and Abdul Hanan Abdullah 2 1 School Electrical Engineering and Computer Science, University of Newcastle, University Drive, Callaghan, NSW 2308, Australia 2 Department of Computer Science, Faculty of Computing, Universiti Teknologi Malaysia, Skudai, Johor Bahru, 81320, Malaysia 3 Forus Health Private Ltd., No. 2234, 23rd Cross, Banashankari 2nd Stage, Bangalore, Karnataka 560 082, India Correspondence should be addressed to Hassan Chizari; [email protected] Received 28 October 2013; Accepted 3 March 2014; Published 6 April 2014 Academic Editor: Xin Wang Copyright © 2014 Majid Hosseini et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ere are many applications for using wireless sensor networks (WSN) in ocean science; however, identifying the exact location of a sensor by itself (localization) is still a challenging problem, where global positioning system (GPS) devices are not applicable underwater. Precise distance measurement between two sensors is a tool of localization and received signal strength (RSS), reflecting transmission loss (TL) phenomena, is widely used in terrestrial WSNs for that matter. Underwater acoustic sensor networks have not been used (UASN), due to the complexity of the TL function. In this paper, we addressed these problems by expressing underwater TL via the Lambert W function, for accurate distance inversion by the Halley method, and compared this to Newton-Raphson inversion. Mathematical proof, MATLAB simulation, and real device implementation demonstrate the accuracy and efficiency of the proposed equation in distance calculation, with fewer iterations, computation stability for short and long distances, and remarkably short processing time. en, the sensitivities of Lambert W function and Newton-Raphson inversion to alteration in TL were examined. e simulation results showed that Lambert W function is more stable to errors than Newton-Raphson inversion. Finally, with a likelihood method, it was shown that RSS is a practical tool for distance measurement in UASN. 1. Introduction In underwater acoustic communications, especially at short range, distance measurement is crucial in tracking [1] and sensor localization [2]. Techniques for this on land include Time Difference of Arrival (TDoA), Time of Arrival (ToA), Received Signal Strength (RSS), and Angle of Arrival (AoA). TDoA compares arrival times by two transmission media, for example, radio frequency (RF) and acoustic waves, to estimate the distance between two nodes using the dissimilar dissemination velocities. In aquatic environment RF has very limited propagation [3], so TDoA is not suitable for UASNs. Since AoA relies on a direct line-of-sight (LOS) path from a transmitter to a receiver, a multipath component arriving as a signal from an entirely different direction can lead to very large errors in AoA measurements [4]. In existing short-range underwater acoustic sensor networks, ToA is widely used to measure distance for sensor localization [2] or target tracking [1]. It is based on the traveling time of an acoustic wave, either one-way or round-trip [4]. A source sends a packet, attaching the current time, and the destination node derives the traveling time by comparing this to its local time (assuming a shared clock). e distance can be inferred via the underwater sound velocity, roughly 1.5 × 10 3 m/sec. Although some good results are reported, as in [5], they assume precise synchronization [3] which is hard to achieve due to the characteristics of sound travel in the water [6]. To date, RSS has had less attention as a method to measure distance. In underwater applications, the problem of measuring RSS has been solved indirectly. In some literature it has been mainly assumed that the RSS value is converted to the distance and they pay less attention on the this conversion circumstance [7]. Reference [8] categorized its proposed net- work operations into two steps: offline and online. In offline mode, several devices beacon at different distances to sensors. Each sensor converts the received TL from time-domain to Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 175275, 8 pages http://dx.doi.org/10.1155/2014/175275
Transcript of Research Article Efficient Underwater RSS Value to Distance...

Research ArticleEfficient Underwater RSS Value to Distance InversionUsing the Lambert Function
Majid Hosseini1 Hassan Chizari2 Tim Poston3
Mazleena Bt Salleh2 and Abdul Hanan Abdullah2
1 School Electrical Engineering and Computer Science University of Newcastle University Drive Callaghan NSW 2308 Australia2 Department of Computer Science Faculty of Computing Universiti Teknologi Malaysia Skudai Johor Bahru 81320 Malaysia3 Forus Health Private Ltd No 2234 23rd Cross Banashankari 2nd Stage Bangalore Karnataka 560 082 India
Correspondence should be addressed to Hassan Chizari chizariutmmy
Received 28 October 2013 Accepted 3 March 2014 Published 6 April 2014
Academic Editor Xin Wang
Copyright copy 2014 Majid Hosseini et alThis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
There are many applications for using wireless sensor networks (WSN) in ocean science however identifying the exact locationof a sensor by itself (localization) is still a challenging problem where global positioning system (GPS) devices are not applicableunderwater Precise distancemeasurement between two sensors is a tool of localization and received signal strength (RSS) reflectingtransmission loss (TL) phenomena is widely used in terrestrialWSNs for thatmatter Underwater acoustic sensor networks have notbeen used (UASN) due to the complexity of the TL function In this paper we addressed these problems by expressing underwaterTL via the Lambert W function for accurate distance inversion by the Halley method and compared this to Newton-Raphsoninversion Mathematical proof MATLAB simulation and real device implementation demonstrate the accuracy and efficiencyof the proposed equation in distance calculation with fewer iterations computation stability for short and long distances andremarkably short processing time Then the sensitivities of Lambert W function and Newton-Raphson inversion to alterationin TL were examined The simulation results showed that Lambert W function is more stable to errors than Newton-Raphsoninversion Finally with a likelihood method it was shown that RSS is a practical tool for distance measurement in UASN
1 Introduction
In underwater acoustic communications especially at shortrange distance measurement is crucial in tracking [1] andsensor localization [2] Techniques for this on land includeTime Difference of Arrival (TDoA) Time of Arrival (ToA)Received Signal Strength (RSS) and Angle of Arrival (AoA)TDoA compares arrival times by two transmission mediafor example radio frequency (RF) and acoustic waves toestimate the distance between two nodes using the dissimilardissemination velocities In aquatic environment RF has verylimited propagation [3] so TDoA is not suitable for UASNsSince AoA relies on a direct line-of-sight (LOS) path from atransmitter to a receiver a multipath component arriving asa signal from an entirely different direction can lead to verylarge errors inAoAmeasurements [4] In existing short-rangeunderwater acoustic sensor networks ToA is widely used tomeasure distance for sensor localization [2] or target tracking
[1] It is based on the traveling time of an acoustic wave eitherone-way or round-trip [4] A source sends a packet attachingthe current time and the destination node derives thetraveling time by comparing this to its local time (assuming ashared clock)Thedistance can be inferred via the underwatersound velocity roughly 15 times 103msec Although somegood results are reported as in [5] they assume precisesynchronization [3] which is hard to achieve due to thecharacteristics of sound travel in the water [6] To date RSShas had less attention as a method to measure distance
In underwater applications the problem of measuringRSS has been solved indirectly In some literature it hasbeen mainly assumed that the RSS value is converted to thedistance and they pay less attention on the this conversioncircumstance [7] Reference [8] categorized its proposed net-work operations into two steps offline and online In offlinemode several devices beacon at different distances to sensorsEach sensor converts the received TL from time-domain to
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 175275 8 pageshttpdxdoiorg1011552014175275
2 Mathematical Problems in Engineering
frequency-domain and stores it in its database where it wasassumed that the sensor knows the exact location of beaconsIn online step after receiving a TL the sensor compares itwith its database and measures the distance of sender basedon maximum-likelihood method Although accurate resultshave been reported from this work this method is basedon availability of beacons and feasibility of having offlinestep which may not be practical in some applications Toreview state-of-the-art methods for localization reader mayrefer to [9] where the measurement of distance using directconversion of TL has not yet been investigated
Efficient inversion is the first contribution of this paperWe show that as a function of underwater transmission loss(TL) distance calculation involves the Lambert119882 functionand evaluate it with few iterations We also invert the TLfunction of distance by the Newton-Raphson method as ayardstick for the proposed equation in accuracy number ofiterations and processing time The second contribution ofthis paper is to practice the feasibility of this inversion dueto high tolerance of TL In this part firstly the sensitivitiesof Lambert 119882 function and Newton-Raphson method toalteration in received TL are examined Secondly using amaximum-likelihood (ML) method it is shown that usingan error recovery method distance measurement using TLinversion is practical
The evaluation is divided into four phases First wemath-ematically derive the 119882 function along with the numericaltests Second we use a MATLAB numerical simulation forboth methods sensitivity to error analysis and error recoverymethod Third we use the ATMEL RAVENRZ-3290 sensora part of the ATMEL RZRAVEN 24GHz Evaluation andStarter kit [10] to obtain real device results regarding ourdesired factors The last phase is to examine the possibilityof using119882 function when there are some unexpected alter-ations to TL
The rest of this paper is organized as follows Section 2explains transmission loss calculation in the underwaterenvironment Section 3 presents the Lambert 119882 functionwith a derivation of the distance equation through the TLfunction Newtonrsquos method inversion for the TL function isin Section 4 Sections 5 and 6 present the simulation andreal test-bed results respectively Section 7 demonstrates theeffect of TL alteration and provides amethod for reducing themeasured distance error The paper concludes in Section 8
2 Underwater Acoustic Transmission Loss
Sound loss in water is classified as spreading loss both spher-ical (1) and cylindrical (2) and attenuation loss [11] fromabsorption duct leakage scattering and diffraction [12]Effective attenuation parameters relate to the medium (salin-ity acidity pressure and temperature) and environment(air bubbles sediment absorption surface reflection andscattering) Here we only consider the transmission mediumparameters For a distance Dist from emitter to receiver
TLsph = 20 log (Dist) Spherical (1)
TLcyl = 10 log (Dist) Cylindrical (2)
so the general transmission loss in sea water is given [12] by
TLtotal = TLsph + TLcyl + 10minus3120572Dist (3)
where 120572 is the absorption coefficient in sea water given (4) bythe Thorp absorption coefficient model [13] It depends onlyon frequency 119891 below 50 kHz [11]
120572 = 10936 [011198912
1 + 1198912+401198912
4100 + 1198912] (4)
where 10936 changes the units from dBkydminus1 to dBkmminus1Spherical spread fits measured data adequately under a widevariety of conditions [11] So we reduce (3) and (1) to
TLtotal = TLsph + 10minus3120572Dist (5)
= 20 log (Dist) + 10minus3120572Dist (6)
Assume that underwater wireless devices can measurethe received signal strength which gives TLtotal So (5)should be solved for the variable Dist In natural logarithmsrepresenting TLtotal by TL (6) gives
TL = 20 ln (Dist)ln (10)
+120572Dist1000 (7)
We would like to convert (7) to Lambert 119882 function inorder to find a solution for Dist based on TLThe Lambert119882function is
119884 = 119860119883119890119860119883= 119882(119883) (8)
To solve for119883 is to find the Lambert function119883 = 119882(119884) Letus consider that119883 = Dist so we will have
119884 = 119860119883 sdot 119890119860119883
119884 = 119860 sdot Dist sdot 119890119860sdotDist
119884
119860= Dist sdot 119890119860sdotDist
ln(119884119860) = ln (Dist sdot 119890119860sdotDist)
ln(119884119860) = ln (Dist) + 119860 sdot Dist
(9)
Let us consider 120582 = ln(10)20 then
ln (119884119860)120582=ln (Dist)120582+119860 sdot Dist120582 (10)
In order to reach to (7) we must have these two condi-tions
119860
120582=120572
1000
ln (119884119860)120582= TL
(11)
Mathematical Problems in Engineering 3
which by solving them we will have
119860 =120582120572
1000
119884 = 119860119890120582TL
(12)
Thus (7) can be converted to Lambert119882 function where 119860and 119884 are presented in (12)
3 The Lambert119882 Function
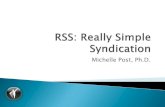
The Lambert 119882 function omega function or product log isthe multivalued inverse of 119908 997891rarr 119908119890119908 defined by
119911 = 119882 (119911) 119890119882(119911) (13)
where 119911 and119882(119911) may be complex We use the subdomainwhere both are real and positive (Figure 1) First developedby Johann Heinrich Lambert around 1764 [14] its pure andapplied applications include the enumeration of trees [15]water-wave height calculation [16] the relations among volt-age current and resistance in a diode [17] ballistic projectiles[18] statisticalmechanics quantumchemistry enzymekinet-ics the analysis of algorithms [19] and the jet fuel problem[14]
The 119911 here is the transmission loss (6) of a received signalwhich is real and positive found from the ratio betweenreceived (RSS) and emitted signal strengths As in Figure 1there is exactly one real 119908 ge 0 for each 119911 ge 0 so119882 returnsa single value as distance To find it start with the specialequation [14]
1199081= 119901 minus 1 where 119901 = radic2 (119890119884 + 1) (14)
and iterate toward119882(119884) by the Halley method from [14]
119908119895+1= 119908119895
minus
119908119895119890119908119895 minus 119911
119890119908119895 (119908119895+ 1) minus ((119908
119895+ 2) (119908
119895119890119908119895 minus 119911) (2119908
119895+ 2))
(15)
This solves (13) for 119908 when 119911 gt 0 converging much fasterthan either Newtonrsquos method or fixed-point iteration [20]
Accordingly (8) can be solved as follows
119884 = 119860119883119890119860119883there4 119883 =
119882(119884)
119860 (16)
From (16) and (12) we can write
Dist =20000 times119882((ln (10) 20000) 120572119890120582TL)
120572 ln (10)
= 1198601times119882(119860
2times 1198901198603)
with 1198601=1000
(120582120572) 1198602=1
1198601
1198603= 120582TL
(17)
and 120572 from (4) Thus (17) is the final equation of Dist basedon RSS via the Lambert 119882 function We next illustrate theefficiency of the proposed distance estimation Numericalproof of the proposed equation can be found in [21]
1
1
2z
w
z = wew
Figure 1 The Lambert119882 function is the inverse of 119908 997891rarr 119908119890119908 For119911 lt 0 it is multivalued andor complex but it is 1-to-1 between 119911 ge 0and 119908 ge 0
4 The Newton-Raphson Method
The well-known Newton or Newton-Raphson method con-verges fast to a root of a real-valued function 119891(119909) It uses119891(119909) and the derivative 1198911015840(119909) to find the root through
119909119899+1= 119909119899minus119891 (119909119899)
1198911015840(119909119899) (18)
In solving (6) for Dist apply this with
119891 (Dist) = 20 log (Dist) + 10minus3120572Dist minus TL (19)
1198911015840(Dist) = 20
Dist+ 10minus3120572 (20)
The starting point is a significant factor in convergencespeed in this method There are also different methods tochoose a good start Our case does not allow a starting pointgreater than 137 where (18) gives a value Dist lt 0 invalid fora logarithm function in (19) Nor can it be 0 due to divisionby zero in the first part of (20) Furthermore our numericalevaluation shows an impractical number of iterations for anystarting point value between 1 and 136 So for the 119899 = 0starting point for 119899 ge 1 we take the initial distance 119909
0=
Dist0= 1mThen from (18) (19) and (20)
Dist119899+1= Dist
119899minus20 log (Dist) + 10minus3120572 Dist(20Dist) + 10minus3120572
(21)
We present simulation and real device experiment resultswith both methods for a full evaluation
5 MATLAB Simulation and Results
MATLAB is a well-known tool for simulation and evaluationWe used it to evaluate our proposed scheme against theNewton method concerning the accuracy of calculation andthe necessary number of iterations As an accuracy goalwe aim to calculate distance with a resolution of 10minus2mBoth methods do achieve this but iterations matter for small
4 Mathematical Problems in Engineering
devices in processing time and energy-efficiency Figure 2illustrates the iterations that each method needs to get thedesired accuracy The Newton method needs 6 iterations fordistances above 100m rising to 8 above 300m Our schemereaches the goal with just 4 iterations up to 5000m Thisuniformity saves the cost of a convergence test
Figure 3 graphs error against distance with various iter-ation counts for each method The 4-step Newton erroris very high even at a distance barely more than 100mThe error shrinks with more iterations but even up to 7iterations it is over 05m for distances longer than 2000mOur scheme shows a steady cost and 10minus2m accuracy withonly 4 iterations This is competitive to results obtained by8 Newton iterations clearly needing fewer computing cyclesand less power Experiments using a real sensor prove itsaccuracy and efficiency
6 Real Test-Bed Evaluation and Results
Real test-beds usually give results slightly or quite differentfrom simulations (especially with sensor networks for whichthere is no specific free simulator available in academia)which thus do not guarantee practicality For a real test-bed experiment we used the RAVENRZ-3290 (specificationsrepresented in Table 1) sold by ATMEL [10] as a part of theATMEL RZRAVEN 24GHz Evaluation and Starter kit Theboard connects to a computer for programming through theAVR JTAGICE-MKII programmer (Figure 4) So we wrotethe codes for each model in C the major programminglanguage for the ATMELAVR products [10] and uploaded tothe experimental board ATMELrsquos powerful and user friendlyGUI called AVR Studio enables users to obtain accurateresults without complex microprocessor programming
The experiment evaluated both119882Halley and the New-ton-Raphson method regarding the iteration count neededto achieve the desired accuracy and the processing timerequired
61 Computation Accuracy For positioning purposes theaccuracy of computation is very significant since RSS-baseddistance measurement is subject to errors like channel fadingand interference As expected a real test-bed gave unexpectedresults Figure 5 shows the real test-bed distance error calcu-lated by each method while there are two different numbersof iterations for theNewton-Raphsonmethod As can be seenfrom the figure theNewtonmethodwith 4 iterations achievesmore accuracy compared to the results obtained from thesimulation for similar method However it also shows lessaccuracy for the 8 iterations one compared to the simulationresults (Figure 3)The error by 8 iterations rises to over 5m in1000mdistance and grows to 8836m for the range of 5000msurprisingly different from the simulation resultsMeanwhilethe119882 scheme still shows a steady calculation behavior givingnearly exact values Our initial guess is that this error mightbe due to different round-off errors from different methods
62 Computation Processing Time Figure 6 shows the timerequired by each method for one distance calculation in arange from 1 to 5000m In order to havemore realistic results
Table 1 The specification of the ATMEL RZRAVEN 24GHzEvaluation and Starter kit
Item SpecificationDevice ATmega 3290Flash 32 KbytesEEPROM 1 KbytesRAM 2 KbytesAVR core 8 bitSpeed grade 4ndash8MHz
9
8
7
6
5
4
3
2
1
0
1 2 6 7 13 14 35 36 114 115 794 795 5000
Distance (m)N
umbe
r of
itera
tions
Newton methodLambert function
Figure 2 The average number of iterations through differentmethods
the methods are embedded in ATMEL experimental kits andran 10 times for the whole mentioned range of distances Onone hand the figure shows the average values of such imple-mentation The LambertHalley scheme takes more than51 sec with very high accuracy roughly 8 sec faster than the4-iteration Newton method with its high error On the otherhand the 8-iteration Newton method which is supposed toreach the desired accuracy according the simulation resultsrequires 6875 more processing time (roughly 865 sec) fora computationwhich is not also accurate enough for distancesgreater than 1500m
It is shown that our transmission-lossdistance inversionmethod using the Lambert function and the Halley iterationis significantly faster and stable compared to the well-knownNewton-Raphson methodThis work clarifies the differencesbetween simulations and real test-bed implementations ofdifferent mathematical methods on low computation abil-ity devices like sensors which might be related to themicrocontroller architecture designs Such differences due tomathematical tools require minutely consideration when it isnecessary like in our case for distance measurement
7 TL Alteration
Localization for underwater sensors is a challenging problemwhich is still under attention of many researchers Currentsolution for this problem usually is based on installing somepowerful devices on ocean floor communicating with someother devices on ocean surface in order to help sensors
Mathematical Problems in Engineering 5
Distance (m)
3500
3000
2500
2000
1500
1000
500
0
Cal
cula
tion
erro
r (m
)
1 10 100 200 300 400 500 10002000300040005000
Newton (4 itr)Newton (5 itr)Newton (6 itr)
(a)
Cal
cula
tion
erro
r (m
)
Distance (m)1 10 100 200 300 400 500 1000 2000 3000 4000 5000
06
05
04
03
02
01
00
Lambert (4 itr)Newton (7 itr)Newton (8 itr)
(b)
Figure 3 The distance calculation error using different methods and different number of iterations
Figure 4 RAVENRZ-3290 sensor and AVR JTAGICE-MKII pro-grammer
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
200
400
600
800
1000
1200
Distance (m)
Cal
cula
tion
erro
r (m
)
Newton (4 itr)
Lambert (4 itr)Newton (8 itr)
Figure 5 The calculation error under different methods anditerations
0
10
20
30
40
50
60
70
80
90
Computational methods
Proc
essin
g tim
e (s
)
Newton (8 itr) 8640025
Lambert (4 itr) 5126025Newton (4 itr) 5972625
Figure 6 The required processing time by different methods
identify their location [22]Most of these techniques were notusing RSS as their distance measurement method due to themultipath and shadowing effect on TL which alters its valuein receiver [9] Based on limitation of RSS most localizationmethods in UASN are using Time of Arrival (ToA) methodwhich needs very precise clock synchronization betweensensorsmdashanother challenging problem even for terrestrialWSN
In order to identify the accuracy of proposed methodwhen the measured TL is not accurate Some experimentshave been done According to [23] TL has the standarddeviation of 5 for up to 2000m underwater with a normaldistribution However [24] reported the value from 10 to 15as the standard deviation of TL based on the distance to theforeshore Tomeasure theworst case scenario in this researchthe alteration of TL is modeled based on [24]
In simulation setup two sensor nodes were consideredin communication range of each other underwater and notnecessarily in the same depth To make the model as simpleas possible the nodes do not share their information of
6 Mathematical Problems in Engineering
50 100 150 200 250 300 350 400 450 500
0
100
200
300
400
500
600
700
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(a) After receiving 5 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
50
100
150
200
250
300
350
400
450
500
Actual distance (m)
(b) After receiving 10 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
140
160
Actual distance (m)
(c) After receiving 50 packets
Figure 7 The distance calculation error with error correction using geometric mean (1)
the distance together Now when a sensor receives a packetbased on the received TL it calculates the sender distance andsaves it in a list By the next packet it receives it measuresthe distance again and saves it to the list again To identifythe estimation distance the sensor uses a simple likelihoodalgorithm (geometric mean) to find the best estimation fromits distance to the receiver The simulation has been runfor 100 times when receiver just receives 5 packets Thesimulation also has been run for receiving 10 50 100 500and 1000 packets The experiments have been repeated forvarious distances between sensors The distance error wherethe sensor calculates the distance based on just one receivedpacket is based on [24] Figures 7 and 8 show the errorin distance measurement using TL and geometric mean asa simple likelihood algorithm when a various number ofpackets has been received in the sensor
The results show that by increasing the number ofreceived packets in the sensor the error will be dramaticallydecreased For instance the average estimation error for 100
experiments between two sensors in 500m distance of eachother and receiving 1000 packets is about 6m However as ithas been shown in the figures there are still some rare resultswith high error rate up to 35m for the same experimentThis indicates that although the proposed geometric meanreduced the amount of error in distance estimation still someothermethods can be added to the algorithm tomake it moreaccurate For instance sensors can share their distance tablestogether in order to reduce the error Another method can beusing the triangulationmethodwhen there aremore than oneneighbors for refining the distance measurement algorithm
8 Conclusions
A new mathematical scheme finds distances among nodesin underwater sensor networks via received signal strengththat is presented by a hybrid computation scheme invertthe transmission loss TL using the Lambert 119882 functionevaluated by the Halley Method We compare its efficiency
Mathematical Problems in Engineering 7
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(a) After receiving 100 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
40
45
50
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(b) After receiving 500 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(c) After receiving 1000 packets
Figure 8 The distance calculation error with error correction using geometric mean (2)
and accuracy with TL inversion through the well-knownNewton-Raphson method and show that the computationmethod influences the accuracy of distance measurementIn simulations the Newton method needs 8 iterations toreach the same accuracy as 4 Halley steps and in the realtest-bed even 8 iterations have substantial error Moreoverin real test-bed results our scheme is 165 faster than the4-iteration Newton method with high error Mathematicalcalculation is thus significant for accurate cost-effectivedistancemeasurement in sensor networks By considering thealteration in value of TL because of multipath and shadowingeffect of underwater the error in distance measurement iscalculated Furthermore it has been shown that althoughthe error in distance measurement is very high using a verysimple likelihood method in receiving several samples of TLcan dramatically reduce the distance estimation error Aslong as the proposed error recovery method is based on twosensors sending data our future work will be on developing
an algorithm for high error recovery and near exact distancemeasurement using RSS for UASN
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Biao L Yu H Haining and Z Chunhua ldquoTarget localiza-tion in underwater acoustic sensor networksrdquo in Proceedingsof the 1st International Congress on Image and Signal Processing(CISP rsquo08) vol 4 pp 68ndash72 Sanya China May 2008
[2] K H Lee C H Yu J W Choi and Y B Seo ldquoToA basedsensor localization in underwater wireless sensor networksrdquoin Proceedings of the SICE Annual Conference pp 1357ndash1361Tokyo Japan August 2008
8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
frequency-domain and stores it in its database where it wasassumed that the sensor knows the exact location of beaconsIn online step after receiving a TL the sensor compares itwith its database and measures the distance of sender basedon maximum-likelihood method Although accurate resultshave been reported from this work this method is basedon availability of beacons and feasibility of having offlinestep which may not be practical in some applications Toreview state-of-the-art methods for localization reader mayrefer to [9] where the measurement of distance using directconversion of TL has not yet been investigated
Efficient inversion is the first contribution of this paperWe show that as a function of underwater transmission loss(TL) distance calculation involves the Lambert119882 functionand evaluate it with few iterations We also invert the TLfunction of distance by the Newton-Raphson method as ayardstick for the proposed equation in accuracy number ofiterations and processing time The second contribution ofthis paper is to practice the feasibility of this inversion dueto high tolerance of TL In this part firstly the sensitivitiesof Lambert 119882 function and Newton-Raphson method toalteration in received TL are examined Secondly using amaximum-likelihood (ML) method it is shown that usingan error recovery method distance measurement using TLinversion is practical
The evaluation is divided into four phases First wemath-ematically derive the 119882 function along with the numericaltests Second we use a MATLAB numerical simulation forboth methods sensitivity to error analysis and error recoverymethod Third we use the ATMEL RAVENRZ-3290 sensora part of the ATMEL RZRAVEN 24GHz Evaluation andStarter kit [10] to obtain real device results regarding ourdesired factors The last phase is to examine the possibilityof using119882 function when there are some unexpected alter-ations to TL
The rest of this paper is organized as follows Section 2explains transmission loss calculation in the underwaterenvironment Section 3 presents the Lambert 119882 functionwith a derivation of the distance equation through the TLfunction Newtonrsquos method inversion for the TL function isin Section 4 Sections 5 and 6 present the simulation andreal test-bed results respectively Section 7 demonstrates theeffect of TL alteration and provides amethod for reducing themeasured distance error The paper concludes in Section 8
2 Underwater Acoustic Transmission Loss
Sound loss in water is classified as spreading loss both spher-ical (1) and cylindrical (2) and attenuation loss [11] fromabsorption duct leakage scattering and diffraction [12]Effective attenuation parameters relate to the medium (salin-ity acidity pressure and temperature) and environment(air bubbles sediment absorption surface reflection andscattering) Here we only consider the transmission mediumparameters For a distance Dist from emitter to receiver
TLsph = 20 log (Dist) Spherical (1)
TLcyl = 10 log (Dist) Cylindrical (2)
so the general transmission loss in sea water is given [12] by
TLtotal = TLsph + TLcyl + 10minus3120572Dist (3)
where 120572 is the absorption coefficient in sea water given (4) bythe Thorp absorption coefficient model [13] It depends onlyon frequency 119891 below 50 kHz [11]
120572 = 10936 [011198912
1 + 1198912+401198912
4100 + 1198912] (4)
where 10936 changes the units from dBkydminus1 to dBkmminus1Spherical spread fits measured data adequately under a widevariety of conditions [11] So we reduce (3) and (1) to
TLtotal = TLsph + 10minus3120572Dist (5)
= 20 log (Dist) + 10minus3120572Dist (6)
Assume that underwater wireless devices can measurethe received signal strength which gives TLtotal So (5)should be solved for the variable Dist In natural logarithmsrepresenting TLtotal by TL (6) gives
TL = 20 ln (Dist)ln (10)
+120572Dist1000 (7)
We would like to convert (7) to Lambert 119882 function inorder to find a solution for Dist based on TLThe Lambert119882function is
119884 = 119860119883119890119860119883= 119882(119883) (8)
To solve for119883 is to find the Lambert function119883 = 119882(119884) Letus consider that119883 = Dist so we will have
119884 = 119860119883 sdot 119890119860119883
119884 = 119860 sdot Dist sdot 119890119860sdotDist
119884
119860= Dist sdot 119890119860sdotDist
ln(119884119860) = ln (Dist sdot 119890119860sdotDist)
ln(119884119860) = ln (Dist) + 119860 sdot Dist
(9)
Let us consider 120582 = ln(10)20 then
ln (119884119860)120582=ln (Dist)120582+119860 sdot Dist120582 (10)
In order to reach to (7) we must have these two condi-tions
119860
120582=120572
1000
ln (119884119860)120582= TL
(11)
Mathematical Problems in Engineering 3
which by solving them we will have
119860 =120582120572
1000
119884 = 119860119890120582TL
(12)
Thus (7) can be converted to Lambert119882 function where 119860and 119884 are presented in (12)
3 The Lambert119882 Function
The Lambert 119882 function omega function or product log isthe multivalued inverse of 119908 997891rarr 119908119890119908 defined by
119911 = 119882 (119911) 119890119882(119911) (13)
where 119911 and119882(119911) may be complex We use the subdomainwhere both are real and positive (Figure 1) First developedby Johann Heinrich Lambert around 1764 [14] its pure andapplied applications include the enumeration of trees [15]water-wave height calculation [16] the relations among volt-age current and resistance in a diode [17] ballistic projectiles[18] statisticalmechanics quantumchemistry enzymekinet-ics the analysis of algorithms [19] and the jet fuel problem[14]
The 119911 here is the transmission loss (6) of a received signalwhich is real and positive found from the ratio betweenreceived (RSS) and emitted signal strengths As in Figure 1there is exactly one real 119908 ge 0 for each 119911 ge 0 so119882 returnsa single value as distance To find it start with the specialequation [14]
1199081= 119901 minus 1 where 119901 = radic2 (119890119884 + 1) (14)
and iterate toward119882(119884) by the Halley method from [14]
119908119895+1= 119908119895
minus
119908119895119890119908119895 minus 119911
119890119908119895 (119908119895+ 1) minus ((119908
119895+ 2) (119908
119895119890119908119895 minus 119911) (2119908
119895+ 2))
(15)
This solves (13) for 119908 when 119911 gt 0 converging much fasterthan either Newtonrsquos method or fixed-point iteration [20]
Accordingly (8) can be solved as follows
119884 = 119860119883119890119860119883there4 119883 =
119882(119884)
119860 (16)
From (16) and (12) we can write
Dist =20000 times119882((ln (10) 20000) 120572119890120582TL)
120572 ln (10)
= 1198601times119882(119860
2times 1198901198603)
with 1198601=1000
(120582120572) 1198602=1
1198601
1198603= 120582TL
(17)
and 120572 from (4) Thus (17) is the final equation of Dist basedon RSS via the Lambert 119882 function We next illustrate theefficiency of the proposed distance estimation Numericalproof of the proposed equation can be found in [21]
1
1
2z
w
z = wew
Figure 1 The Lambert119882 function is the inverse of 119908 997891rarr 119908119890119908 For119911 lt 0 it is multivalued andor complex but it is 1-to-1 between 119911 ge 0and 119908 ge 0
4 The Newton-Raphson Method
The well-known Newton or Newton-Raphson method con-verges fast to a root of a real-valued function 119891(119909) It uses119891(119909) and the derivative 1198911015840(119909) to find the root through
119909119899+1= 119909119899minus119891 (119909119899)
1198911015840(119909119899) (18)
In solving (6) for Dist apply this with
119891 (Dist) = 20 log (Dist) + 10minus3120572Dist minus TL (19)
1198911015840(Dist) = 20
Dist+ 10minus3120572 (20)
The starting point is a significant factor in convergencespeed in this method There are also different methods tochoose a good start Our case does not allow a starting pointgreater than 137 where (18) gives a value Dist lt 0 invalid fora logarithm function in (19) Nor can it be 0 due to divisionby zero in the first part of (20) Furthermore our numericalevaluation shows an impractical number of iterations for anystarting point value between 1 and 136 So for the 119899 = 0starting point for 119899 ge 1 we take the initial distance 119909
0=
Dist0= 1mThen from (18) (19) and (20)
Dist119899+1= Dist
119899minus20 log (Dist) + 10minus3120572 Dist(20Dist) + 10minus3120572
(21)
We present simulation and real device experiment resultswith both methods for a full evaluation
5 MATLAB Simulation and Results
MATLAB is a well-known tool for simulation and evaluationWe used it to evaluate our proposed scheme against theNewton method concerning the accuracy of calculation andthe necessary number of iterations As an accuracy goalwe aim to calculate distance with a resolution of 10minus2mBoth methods do achieve this but iterations matter for small
4 Mathematical Problems in Engineering
devices in processing time and energy-efficiency Figure 2illustrates the iterations that each method needs to get thedesired accuracy The Newton method needs 6 iterations fordistances above 100m rising to 8 above 300m Our schemereaches the goal with just 4 iterations up to 5000m Thisuniformity saves the cost of a convergence test
Figure 3 graphs error against distance with various iter-ation counts for each method The 4-step Newton erroris very high even at a distance barely more than 100mThe error shrinks with more iterations but even up to 7iterations it is over 05m for distances longer than 2000mOur scheme shows a steady cost and 10minus2m accuracy withonly 4 iterations This is competitive to results obtained by8 Newton iterations clearly needing fewer computing cyclesand less power Experiments using a real sensor prove itsaccuracy and efficiency
6 Real Test-Bed Evaluation and Results
Real test-beds usually give results slightly or quite differentfrom simulations (especially with sensor networks for whichthere is no specific free simulator available in academia)which thus do not guarantee practicality For a real test-bed experiment we used the RAVENRZ-3290 (specificationsrepresented in Table 1) sold by ATMEL [10] as a part of theATMEL RZRAVEN 24GHz Evaluation and Starter kit Theboard connects to a computer for programming through theAVR JTAGICE-MKII programmer (Figure 4) So we wrotethe codes for each model in C the major programminglanguage for the ATMELAVR products [10] and uploaded tothe experimental board ATMELrsquos powerful and user friendlyGUI called AVR Studio enables users to obtain accurateresults without complex microprocessor programming
The experiment evaluated both119882Halley and the New-ton-Raphson method regarding the iteration count neededto achieve the desired accuracy and the processing timerequired
61 Computation Accuracy For positioning purposes theaccuracy of computation is very significant since RSS-baseddistance measurement is subject to errors like channel fadingand interference As expected a real test-bed gave unexpectedresults Figure 5 shows the real test-bed distance error calcu-lated by each method while there are two different numbersof iterations for theNewton-Raphsonmethod As can be seenfrom the figure theNewtonmethodwith 4 iterations achievesmore accuracy compared to the results obtained from thesimulation for similar method However it also shows lessaccuracy for the 8 iterations one compared to the simulationresults (Figure 3)The error by 8 iterations rises to over 5m in1000mdistance and grows to 8836m for the range of 5000msurprisingly different from the simulation resultsMeanwhilethe119882 scheme still shows a steady calculation behavior givingnearly exact values Our initial guess is that this error mightbe due to different round-off errors from different methods
62 Computation Processing Time Figure 6 shows the timerequired by each method for one distance calculation in arange from 1 to 5000m In order to havemore realistic results
Table 1 The specification of the ATMEL RZRAVEN 24GHzEvaluation and Starter kit
Item SpecificationDevice ATmega 3290Flash 32 KbytesEEPROM 1 KbytesRAM 2 KbytesAVR core 8 bitSpeed grade 4ndash8MHz
9
8
7
6
5
4
3
2
1
0
1 2 6 7 13 14 35 36 114 115 794 795 5000
Distance (m)N
umbe
r of
itera
tions
Newton methodLambert function
Figure 2 The average number of iterations through differentmethods
the methods are embedded in ATMEL experimental kits andran 10 times for the whole mentioned range of distances Onone hand the figure shows the average values of such imple-mentation The LambertHalley scheme takes more than51 sec with very high accuracy roughly 8 sec faster than the4-iteration Newton method with its high error On the otherhand the 8-iteration Newton method which is supposed toreach the desired accuracy according the simulation resultsrequires 6875 more processing time (roughly 865 sec) fora computationwhich is not also accurate enough for distancesgreater than 1500m
It is shown that our transmission-lossdistance inversionmethod using the Lambert function and the Halley iterationis significantly faster and stable compared to the well-knownNewton-Raphson methodThis work clarifies the differencesbetween simulations and real test-bed implementations ofdifferent mathematical methods on low computation abil-ity devices like sensors which might be related to themicrocontroller architecture designs Such differences due tomathematical tools require minutely consideration when it isnecessary like in our case for distance measurement
7 TL Alteration
Localization for underwater sensors is a challenging problemwhich is still under attention of many researchers Currentsolution for this problem usually is based on installing somepowerful devices on ocean floor communicating with someother devices on ocean surface in order to help sensors
Mathematical Problems in Engineering 5
Distance (m)
3500
3000
2500
2000
1500
1000
500
0
Cal
cula
tion
erro
r (m
)
1 10 100 200 300 400 500 10002000300040005000
Newton (4 itr)Newton (5 itr)Newton (6 itr)
(a)
Cal
cula
tion
erro
r (m
)
Distance (m)1 10 100 200 300 400 500 1000 2000 3000 4000 5000
06
05
04
03
02
01
00
Lambert (4 itr)Newton (7 itr)Newton (8 itr)
(b)
Figure 3 The distance calculation error using different methods and different number of iterations
Figure 4 RAVENRZ-3290 sensor and AVR JTAGICE-MKII pro-grammer
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
200
400
600
800
1000
1200
Distance (m)
Cal
cula
tion
erro
r (m
)
Newton (4 itr)
Lambert (4 itr)Newton (8 itr)
Figure 5 The calculation error under different methods anditerations
0
10
20
30
40
50
60
70
80
90
Computational methods
Proc
essin
g tim
e (s
)
Newton (8 itr) 8640025
Lambert (4 itr) 5126025Newton (4 itr) 5972625
Figure 6 The required processing time by different methods
identify their location [22]Most of these techniques were notusing RSS as their distance measurement method due to themultipath and shadowing effect on TL which alters its valuein receiver [9] Based on limitation of RSS most localizationmethods in UASN are using Time of Arrival (ToA) methodwhich needs very precise clock synchronization betweensensorsmdashanother challenging problem even for terrestrialWSN
In order to identify the accuracy of proposed methodwhen the measured TL is not accurate Some experimentshave been done According to [23] TL has the standarddeviation of 5 for up to 2000m underwater with a normaldistribution However [24] reported the value from 10 to 15as the standard deviation of TL based on the distance to theforeshore Tomeasure theworst case scenario in this researchthe alteration of TL is modeled based on [24]
In simulation setup two sensor nodes were consideredin communication range of each other underwater and notnecessarily in the same depth To make the model as simpleas possible the nodes do not share their information of
6 Mathematical Problems in Engineering
50 100 150 200 250 300 350 400 450 500
0
100
200
300
400
500
600
700
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(a) After receiving 5 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
50
100
150
200
250
300
350
400
450
500
Actual distance (m)
(b) After receiving 10 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
140
160
Actual distance (m)
(c) After receiving 50 packets
Figure 7 The distance calculation error with error correction using geometric mean (1)
the distance together Now when a sensor receives a packetbased on the received TL it calculates the sender distance andsaves it in a list By the next packet it receives it measuresthe distance again and saves it to the list again To identifythe estimation distance the sensor uses a simple likelihoodalgorithm (geometric mean) to find the best estimation fromits distance to the receiver The simulation has been runfor 100 times when receiver just receives 5 packets Thesimulation also has been run for receiving 10 50 100 500and 1000 packets The experiments have been repeated forvarious distances between sensors The distance error wherethe sensor calculates the distance based on just one receivedpacket is based on [24] Figures 7 and 8 show the errorin distance measurement using TL and geometric mean asa simple likelihood algorithm when a various number ofpackets has been received in the sensor
The results show that by increasing the number ofreceived packets in the sensor the error will be dramaticallydecreased For instance the average estimation error for 100
experiments between two sensors in 500m distance of eachother and receiving 1000 packets is about 6m However as ithas been shown in the figures there are still some rare resultswith high error rate up to 35m for the same experimentThis indicates that although the proposed geometric meanreduced the amount of error in distance estimation still someothermethods can be added to the algorithm tomake it moreaccurate For instance sensors can share their distance tablestogether in order to reduce the error Another method can beusing the triangulationmethodwhen there aremore than oneneighbors for refining the distance measurement algorithm
8 Conclusions
A new mathematical scheme finds distances among nodesin underwater sensor networks via received signal strengththat is presented by a hybrid computation scheme invertthe transmission loss TL using the Lambert 119882 functionevaluated by the Halley Method We compare its efficiency
Mathematical Problems in Engineering 7
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(a) After receiving 100 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
40
45
50
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(b) After receiving 500 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(c) After receiving 1000 packets
Figure 8 The distance calculation error with error correction using geometric mean (2)
and accuracy with TL inversion through the well-knownNewton-Raphson method and show that the computationmethod influences the accuracy of distance measurementIn simulations the Newton method needs 8 iterations toreach the same accuracy as 4 Halley steps and in the realtest-bed even 8 iterations have substantial error Moreoverin real test-bed results our scheme is 165 faster than the4-iteration Newton method with high error Mathematicalcalculation is thus significant for accurate cost-effectivedistancemeasurement in sensor networks By considering thealteration in value of TL because of multipath and shadowingeffect of underwater the error in distance measurement iscalculated Furthermore it has been shown that althoughthe error in distance measurement is very high using a verysimple likelihood method in receiving several samples of TLcan dramatically reduce the distance estimation error Aslong as the proposed error recovery method is based on twosensors sending data our future work will be on developing
an algorithm for high error recovery and near exact distancemeasurement using RSS for UASN
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Biao L Yu H Haining and Z Chunhua ldquoTarget localiza-tion in underwater acoustic sensor networksrdquo in Proceedingsof the 1st International Congress on Image and Signal Processing(CISP rsquo08) vol 4 pp 68ndash72 Sanya China May 2008
[2] K H Lee C H Yu J W Choi and Y B Seo ldquoToA basedsensor localization in underwater wireless sensor networksrdquoin Proceedings of the SICE Annual Conference pp 1357ndash1361Tokyo Japan August 2008
8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
which by solving them we will have
119860 =120582120572
1000
119884 = 119860119890120582TL
(12)
Thus (7) can be converted to Lambert119882 function where 119860and 119884 are presented in (12)
3 The Lambert119882 Function
The Lambert 119882 function omega function or product log isthe multivalued inverse of 119908 997891rarr 119908119890119908 defined by
119911 = 119882 (119911) 119890119882(119911) (13)
where 119911 and119882(119911) may be complex We use the subdomainwhere both are real and positive (Figure 1) First developedby Johann Heinrich Lambert around 1764 [14] its pure andapplied applications include the enumeration of trees [15]water-wave height calculation [16] the relations among volt-age current and resistance in a diode [17] ballistic projectiles[18] statisticalmechanics quantumchemistry enzymekinet-ics the analysis of algorithms [19] and the jet fuel problem[14]
The 119911 here is the transmission loss (6) of a received signalwhich is real and positive found from the ratio betweenreceived (RSS) and emitted signal strengths As in Figure 1there is exactly one real 119908 ge 0 for each 119911 ge 0 so119882 returnsa single value as distance To find it start with the specialequation [14]
1199081= 119901 minus 1 where 119901 = radic2 (119890119884 + 1) (14)
and iterate toward119882(119884) by the Halley method from [14]
119908119895+1= 119908119895
minus
119908119895119890119908119895 minus 119911
119890119908119895 (119908119895+ 1) minus ((119908
119895+ 2) (119908
119895119890119908119895 minus 119911) (2119908
119895+ 2))
(15)
This solves (13) for 119908 when 119911 gt 0 converging much fasterthan either Newtonrsquos method or fixed-point iteration [20]
Accordingly (8) can be solved as follows
119884 = 119860119883119890119860119883there4 119883 =
119882(119884)
119860 (16)
From (16) and (12) we can write
Dist =20000 times119882((ln (10) 20000) 120572119890120582TL)
120572 ln (10)
= 1198601times119882(119860
2times 1198901198603)
with 1198601=1000
(120582120572) 1198602=1
1198601
1198603= 120582TL
(17)
and 120572 from (4) Thus (17) is the final equation of Dist basedon RSS via the Lambert 119882 function We next illustrate theefficiency of the proposed distance estimation Numericalproof of the proposed equation can be found in [21]
1
1
2z
w
z = wew
Figure 1 The Lambert119882 function is the inverse of 119908 997891rarr 119908119890119908 For119911 lt 0 it is multivalued andor complex but it is 1-to-1 between 119911 ge 0and 119908 ge 0
4 The Newton-Raphson Method
The well-known Newton or Newton-Raphson method con-verges fast to a root of a real-valued function 119891(119909) It uses119891(119909) and the derivative 1198911015840(119909) to find the root through
119909119899+1= 119909119899minus119891 (119909119899)
1198911015840(119909119899) (18)
In solving (6) for Dist apply this with
119891 (Dist) = 20 log (Dist) + 10minus3120572Dist minus TL (19)
1198911015840(Dist) = 20
Dist+ 10minus3120572 (20)
The starting point is a significant factor in convergencespeed in this method There are also different methods tochoose a good start Our case does not allow a starting pointgreater than 137 where (18) gives a value Dist lt 0 invalid fora logarithm function in (19) Nor can it be 0 due to divisionby zero in the first part of (20) Furthermore our numericalevaluation shows an impractical number of iterations for anystarting point value between 1 and 136 So for the 119899 = 0starting point for 119899 ge 1 we take the initial distance 119909
0=
Dist0= 1mThen from (18) (19) and (20)
Dist119899+1= Dist
119899minus20 log (Dist) + 10minus3120572 Dist(20Dist) + 10minus3120572
(21)
We present simulation and real device experiment resultswith both methods for a full evaluation
5 MATLAB Simulation and Results
MATLAB is a well-known tool for simulation and evaluationWe used it to evaluate our proposed scheme against theNewton method concerning the accuracy of calculation andthe necessary number of iterations As an accuracy goalwe aim to calculate distance with a resolution of 10minus2mBoth methods do achieve this but iterations matter for small
4 Mathematical Problems in Engineering
devices in processing time and energy-efficiency Figure 2illustrates the iterations that each method needs to get thedesired accuracy The Newton method needs 6 iterations fordistances above 100m rising to 8 above 300m Our schemereaches the goal with just 4 iterations up to 5000m Thisuniformity saves the cost of a convergence test
Figure 3 graphs error against distance with various iter-ation counts for each method The 4-step Newton erroris very high even at a distance barely more than 100mThe error shrinks with more iterations but even up to 7iterations it is over 05m for distances longer than 2000mOur scheme shows a steady cost and 10minus2m accuracy withonly 4 iterations This is competitive to results obtained by8 Newton iterations clearly needing fewer computing cyclesand less power Experiments using a real sensor prove itsaccuracy and efficiency
6 Real Test-Bed Evaluation and Results
Real test-beds usually give results slightly or quite differentfrom simulations (especially with sensor networks for whichthere is no specific free simulator available in academia)which thus do not guarantee practicality For a real test-bed experiment we used the RAVENRZ-3290 (specificationsrepresented in Table 1) sold by ATMEL [10] as a part of theATMEL RZRAVEN 24GHz Evaluation and Starter kit Theboard connects to a computer for programming through theAVR JTAGICE-MKII programmer (Figure 4) So we wrotethe codes for each model in C the major programminglanguage for the ATMELAVR products [10] and uploaded tothe experimental board ATMELrsquos powerful and user friendlyGUI called AVR Studio enables users to obtain accurateresults without complex microprocessor programming
The experiment evaluated both119882Halley and the New-ton-Raphson method regarding the iteration count neededto achieve the desired accuracy and the processing timerequired
61 Computation Accuracy For positioning purposes theaccuracy of computation is very significant since RSS-baseddistance measurement is subject to errors like channel fadingand interference As expected a real test-bed gave unexpectedresults Figure 5 shows the real test-bed distance error calcu-lated by each method while there are two different numbersof iterations for theNewton-Raphsonmethod As can be seenfrom the figure theNewtonmethodwith 4 iterations achievesmore accuracy compared to the results obtained from thesimulation for similar method However it also shows lessaccuracy for the 8 iterations one compared to the simulationresults (Figure 3)The error by 8 iterations rises to over 5m in1000mdistance and grows to 8836m for the range of 5000msurprisingly different from the simulation resultsMeanwhilethe119882 scheme still shows a steady calculation behavior givingnearly exact values Our initial guess is that this error mightbe due to different round-off errors from different methods
62 Computation Processing Time Figure 6 shows the timerequired by each method for one distance calculation in arange from 1 to 5000m In order to havemore realistic results
Table 1 The specification of the ATMEL RZRAVEN 24GHzEvaluation and Starter kit
Item SpecificationDevice ATmega 3290Flash 32 KbytesEEPROM 1 KbytesRAM 2 KbytesAVR core 8 bitSpeed grade 4ndash8MHz
9
8
7
6
5
4
3
2
1
0
1 2 6 7 13 14 35 36 114 115 794 795 5000
Distance (m)N
umbe
r of
itera
tions
Newton methodLambert function
Figure 2 The average number of iterations through differentmethods
the methods are embedded in ATMEL experimental kits andran 10 times for the whole mentioned range of distances Onone hand the figure shows the average values of such imple-mentation The LambertHalley scheme takes more than51 sec with very high accuracy roughly 8 sec faster than the4-iteration Newton method with its high error On the otherhand the 8-iteration Newton method which is supposed toreach the desired accuracy according the simulation resultsrequires 6875 more processing time (roughly 865 sec) fora computationwhich is not also accurate enough for distancesgreater than 1500m
It is shown that our transmission-lossdistance inversionmethod using the Lambert function and the Halley iterationis significantly faster and stable compared to the well-knownNewton-Raphson methodThis work clarifies the differencesbetween simulations and real test-bed implementations ofdifferent mathematical methods on low computation abil-ity devices like sensors which might be related to themicrocontroller architecture designs Such differences due tomathematical tools require minutely consideration when it isnecessary like in our case for distance measurement
7 TL Alteration
Localization for underwater sensors is a challenging problemwhich is still under attention of many researchers Currentsolution for this problem usually is based on installing somepowerful devices on ocean floor communicating with someother devices on ocean surface in order to help sensors
Mathematical Problems in Engineering 5
Distance (m)
3500
3000
2500
2000
1500
1000
500
0
Cal
cula
tion
erro
r (m
)
1 10 100 200 300 400 500 10002000300040005000
Newton (4 itr)Newton (5 itr)Newton (6 itr)
(a)
Cal
cula
tion
erro
r (m
)
Distance (m)1 10 100 200 300 400 500 1000 2000 3000 4000 5000
06
05
04
03
02
01
00
Lambert (4 itr)Newton (7 itr)Newton (8 itr)
(b)
Figure 3 The distance calculation error using different methods and different number of iterations
Figure 4 RAVENRZ-3290 sensor and AVR JTAGICE-MKII pro-grammer
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
200
400
600
800
1000
1200
Distance (m)
Cal
cula
tion
erro
r (m
)
Newton (4 itr)
Lambert (4 itr)Newton (8 itr)
Figure 5 The calculation error under different methods anditerations
0
10
20
30
40
50
60
70
80
90
Computational methods
Proc
essin
g tim
e (s
)
Newton (8 itr) 8640025
Lambert (4 itr) 5126025Newton (4 itr) 5972625
Figure 6 The required processing time by different methods
identify their location [22]Most of these techniques were notusing RSS as their distance measurement method due to themultipath and shadowing effect on TL which alters its valuein receiver [9] Based on limitation of RSS most localizationmethods in UASN are using Time of Arrival (ToA) methodwhich needs very precise clock synchronization betweensensorsmdashanother challenging problem even for terrestrialWSN
In order to identify the accuracy of proposed methodwhen the measured TL is not accurate Some experimentshave been done According to [23] TL has the standarddeviation of 5 for up to 2000m underwater with a normaldistribution However [24] reported the value from 10 to 15as the standard deviation of TL based on the distance to theforeshore Tomeasure theworst case scenario in this researchthe alteration of TL is modeled based on [24]
In simulation setup two sensor nodes were consideredin communication range of each other underwater and notnecessarily in the same depth To make the model as simpleas possible the nodes do not share their information of
6 Mathematical Problems in Engineering
50 100 150 200 250 300 350 400 450 500
0
100
200
300
400
500
600
700
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(a) After receiving 5 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
50
100
150
200
250
300
350
400
450
500
Actual distance (m)
(b) After receiving 10 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
140
160
Actual distance (m)
(c) After receiving 50 packets
Figure 7 The distance calculation error with error correction using geometric mean (1)
the distance together Now when a sensor receives a packetbased on the received TL it calculates the sender distance andsaves it in a list By the next packet it receives it measuresthe distance again and saves it to the list again To identifythe estimation distance the sensor uses a simple likelihoodalgorithm (geometric mean) to find the best estimation fromits distance to the receiver The simulation has been runfor 100 times when receiver just receives 5 packets Thesimulation also has been run for receiving 10 50 100 500and 1000 packets The experiments have been repeated forvarious distances between sensors The distance error wherethe sensor calculates the distance based on just one receivedpacket is based on [24] Figures 7 and 8 show the errorin distance measurement using TL and geometric mean asa simple likelihood algorithm when a various number ofpackets has been received in the sensor
The results show that by increasing the number ofreceived packets in the sensor the error will be dramaticallydecreased For instance the average estimation error for 100
experiments between two sensors in 500m distance of eachother and receiving 1000 packets is about 6m However as ithas been shown in the figures there are still some rare resultswith high error rate up to 35m for the same experimentThis indicates that although the proposed geometric meanreduced the amount of error in distance estimation still someothermethods can be added to the algorithm tomake it moreaccurate For instance sensors can share their distance tablestogether in order to reduce the error Another method can beusing the triangulationmethodwhen there aremore than oneneighbors for refining the distance measurement algorithm
8 Conclusions
A new mathematical scheme finds distances among nodesin underwater sensor networks via received signal strengththat is presented by a hybrid computation scheme invertthe transmission loss TL using the Lambert 119882 functionevaluated by the Halley Method We compare its efficiency
Mathematical Problems in Engineering 7
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(a) After receiving 100 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
40
45
50
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(b) After receiving 500 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(c) After receiving 1000 packets
Figure 8 The distance calculation error with error correction using geometric mean (2)
and accuracy with TL inversion through the well-knownNewton-Raphson method and show that the computationmethod influences the accuracy of distance measurementIn simulations the Newton method needs 8 iterations toreach the same accuracy as 4 Halley steps and in the realtest-bed even 8 iterations have substantial error Moreoverin real test-bed results our scheme is 165 faster than the4-iteration Newton method with high error Mathematicalcalculation is thus significant for accurate cost-effectivedistancemeasurement in sensor networks By considering thealteration in value of TL because of multipath and shadowingeffect of underwater the error in distance measurement iscalculated Furthermore it has been shown that althoughthe error in distance measurement is very high using a verysimple likelihood method in receiving several samples of TLcan dramatically reduce the distance estimation error Aslong as the proposed error recovery method is based on twosensors sending data our future work will be on developing
an algorithm for high error recovery and near exact distancemeasurement using RSS for UASN
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Biao L Yu H Haining and Z Chunhua ldquoTarget localiza-tion in underwater acoustic sensor networksrdquo in Proceedingsof the 1st International Congress on Image and Signal Processing(CISP rsquo08) vol 4 pp 68ndash72 Sanya China May 2008
[2] K H Lee C H Yu J W Choi and Y B Seo ldquoToA basedsensor localization in underwater wireless sensor networksrdquoin Proceedings of the SICE Annual Conference pp 1357ndash1361Tokyo Japan August 2008
8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
devices in processing time and energy-efficiency Figure 2illustrates the iterations that each method needs to get thedesired accuracy The Newton method needs 6 iterations fordistances above 100m rising to 8 above 300m Our schemereaches the goal with just 4 iterations up to 5000m Thisuniformity saves the cost of a convergence test
Figure 3 graphs error against distance with various iter-ation counts for each method The 4-step Newton erroris very high even at a distance barely more than 100mThe error shrinks with more iterations but even up to 7iterations it is over 05m for distances longer than 2000mOur scheme shows a steady cost and 10minus2m accuracy withonly 4 iterations This is competitive to results obtained by8 Newton iterations clearly needing fewer computing cyclesand less power Experiments using a real sensor prove itsaccuracy and efficiency
6 Real Test-Bed Evaluation and Results
Real test-beds usually give results slightly or quite differentfrom simulations (especially with sensor networks for whichthere is no specific free simulator available in academia)which thus do not guarantee practicality For a real test-bed experiment we used the RAVENRZ-3290 (specificationsrepresented in Table 1) sold by ATMEL [10] as a part of theATMEL RZRAVEN 24GHz Evaluation and Starter kit Theboard connects to a computer for programming through theAVR JTAGICE-MKII programmer (Figure 4) So we wrotethe codes for each model in C the major programminglanguage for the ATMELAVR products [10] and uploaded tothe experimental board ATMELrsquos powerful and user friendlyGUI called AVR Studio enables users to obtain accurateresults without complex microprocessor programming
The experiment evaluated both119882Halley and the New-ton-Raphson method regarding the iteration count neededto achieve the desired accuracy and the processing timerequired
61 Computation Accuracy For positioning purposes theaccuracy of computation is very significant since RSS-baseddistance measurement is subject to errors like channel fadingand interference As expected a real test-bed gave unexpectedresults Figure 5 shows the real test-bed distance error calcu-lated by each method while there are two different numbersof iterations for theNewton-Raphsonmethod As can be seenfrom the figure theNewtonmethodwith 4 iterations achievesmore accuracy compared to the results obtained from thesimulation for similar method However it also shows lessaccuracy for the 8 iterations one compared to the simulationresults (Figure 3)The error by 8 iterations rises to over 5m in1000mdistance and grows to 8836m for the range of 5000msurprisingly different from the simulation resultsMeanwhilethe119882 scheme still shows a steady calculation behavior givingnearly exact values Our initial guess is that this error mightbe due to different round-off errors from different methods
62 Computation Processing Time Figure 6 shows the timerequired by each method for one distance calculation in arange from 1 to 5000m In order to havemore realistic results
Table 1 The specification of the ATMEL RZRAVEN 24GHzEvaluation and Starter kit
Item SpecificationDevice ATmega 3290Flash 32 KbytesEEPROM 1 KbytesRAM 2 KbytesAVR core 8 bitSpeed grade 4ndash8MHz
9
8
7
6
5
4
3
2
1
0
1 2 6 7 13 14 35 36 114 115 794 795 5000
Distance (m)N
umbe
r of
itera
tions
Newton methodLambert function
Figure 2 The average number of iterations through differentmethods
the methods are embedded in ATMEL experimental kits andran 10 times for the whole mentioned range of distances Onone hand the figure shows the average values of such imple-mentation The LambertHalley scheme takes more than51 sec with very high accuracy roughly 8 sec faster than the4-iteration Newton method with its high error On the otherhand the 8-iteration Newton method which is supposed toreach the desired accuracy according the simulation resultsrequires 6875 more processing time (roughly 865 sec) fora computationwhich is not also accurate enough for distancesgreater than 1500m
It is shown that our transmission-lossdistance inversionmethod using the Lambert function and the Halley iterationis significantly faster and stable compared to the well-knownNewton-Raphson methodThis work clarifies the differencesbetween simulations and real test-bed implementations ofdifferent mathematical methods on low computation abil-ity devices like sensors which might be related to themicrocontroller architecture designs Such differences due tomathematical tools require minutely consideration when it isnecessary like in our case for distance measurement
7 TL Alteration
Localization for underwater sensors is a challenging problemwhich is still under attention of many researchers Currentsolution for this problem usually is based on installing somepowerful devices on ocean floor communicating with someother devices on ocean surface in order to help sensors
Mathematical Problems in Engineering 5
Distance (m)
3500
3000
2500
2000
1500
1000
500
0
Cal
cula
tion
erro
r (m
)
1 10 100 200 300 400 500 10002000300040005000
Newton (4 itr)Newton (5 itr)Newton (6 itr)
(a)
Cal
cula
tion
erro
r (m
)
Distance (m)1 10 100 200 300 400 500 1000 2000 3000 4000 5000
06
05
04
03
02
01
00
Lambert (4 itr)Newton (7 itr)Newton (8 itr)
(b)
Figure 3 The distance calculation error using different methods and different number of iterations
Figure 4 RAVENRZ-3290 sensor and AVR JTAGICE-MKII pro-grammer
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
200
400
600
800
1000
1200
Distance (m)
Cal
cula
tion
erro
r (m
)
Newton (4 itr)
Lambert (4 itr)Newton (8 itr)
Figure 5 The calculation error under different methods anditerations
0
10
20
30
40
50
60
70
80
90
Computational methods
Proc
essin
g tim
e (s
)
Newton (8 itr) 8640025
Lambert (4 itr) 5126025Newton (4 itr) 5972625
Figure 6 The required processing time by different methods
identify their location [22]Most of these techniques were notusing RSS as their distance measurement method due to themultipath and shadowing effect on TL which alters its valuein receiver [9] Based on limitation of RSS most localizationmethods in UASN are using Time of Arrival (ToA) methodwhich needs very precise clock synchronization betweensensorsmdashanother challenging problem even for terrestrialWSN
In order to identify the accuracy of proposed methodwhen the measured TL is not accurate Some experimentshave been done According to [23] TL has the standarddeviation of 5 for up to 2000m underwater with a normaldistribution However [24] reported the value from 10 to 15as the standard deviation of TL based on the distance to theforeshore Tomeasure theworst case scenario in this researchthe alteration of TL is modeled based on [24]
In simulation setup two sensor nodes were consideredin communication range of each other underwater and notnecessarily in the same depth To make the model as simpleas possible the nodes do not share their information of
6 Mathematical Problems in Engineering
50 100 150 200 250 300 350 400 450 500
0
100
200
300
400
500
600
700
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(a) After receiving 5 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
50
100
150
200
250
300
350
400
450
500
Actual distance (m)
(b) After receiving 10 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
140
160
Actual distance (m)
(c) After receiving 50 packets
Figure 7 The distance calculation error with error correction using geometric mean (1)
the distance together Now when a sensor receives a packetbased on the received TL it calculates the sender distance andsaves it in a list By the next packet it receives it measuresthe distance again and saves it to the list again To identifythe estimation distance the sensor uses a simple likelihoodalgorithm (geometric mean) to find the best estimation fromits distance to the receiver The simulation has been runfor 100 times when receiver just receives 5 packets Thesimulation also has been run for receiving 10 50 100 500and 1000 packets The experiments have been repeated forvarious distances between sensors The distance error wherethe sensor calculates the distance based on just one receivedpacket is based on [24] Figures 7 and 8 show the errorin distance measurement using TL and geometric mean asa simple likelihood algorithm when a various number ofpackets has been received in the sensor
The results show that by increasing the number ofreceived packets in the sensor the error will be dramaticallydecreased For instance the average estimation error for 100
experiments between two sensors in 500m distance of eachother and receiving 1000 packets is about 6m However as ithas been shown in the figures there are still some rare resultswith high error rate up to 35m for the same experimentThis indicates that although the proposed geometric meanreduced the amount of error in distance estimation still someothermethods can be added to the algorithm tomake it moreaccurate For instance sensors can share their distance tablestogether in order to reduce the error Another method can beusing the triangulationmethodwhen there aremore than oneneighbors for refining the distance measurement algorithm
8 Conclusions
A new mathematical scheme finds distances among nodesin underwater sensor networks via received signal strengththat is presented by a hybrid computation scheme invertthe transmission loss TL using the Lambert 119882 functionevaluated by the Halley Method We compare its efficiency
Mathematical Problems in Engineering 7
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(a) After receiving 100 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
40
45
50
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(b) After receiving 500 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(c) After receiving 1000 packets
Figure 8 The distance calculation error with error correction using geometric mean (2)
and accuracy with TL inversion through the well-knownNewton-Raphson method and show that the computationmethod influences the accuracy of distance measurementIn simulations the Newton method needs 8 iterations toreach the same accuracy as 4 Halley steps and in the realtest-bed even 8 iterations have substantial error Moreoverin real test-bed results our scheme is 165 faster than the4-iteration Newton method with high error Mathematicalcalculation is thus significant for accurate cost-effectivedistancemeasurement in sensor networks By considering thealteration in value of TL because of multipath and shadowingeffect of underwater the error in distance measurement iscalculated Furthermore it has been shown that althoughthe error in distance measurement is very high using a verysimple likelihood method in receiving several samples of TLcan dramatically reduce the distance estimation error Aslong as the proposed error recovery method is based on twosensors sending data our future work will be on developing
an algorithm for high error recovery and near exact distancemeasurement using RSS for UASN
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Biao L Yu H Haining and Z Chunhua ldquoTarget localiza-tion in underwater acoustic sensor networksrdquo in Proceedingsof the 1st International Congress on Image and Signal Processing(CISP rsquo08) vol 4 pp 68ndash72 Sanya China May 2008
[2] K H Lee C H Yu J W Choi and Y B Seo ldquoToA basedsensor localization in underwater wireless sensor networksrdquoin Proceedings of the SICE Annual Conference pp 1357ndash1361Tokyo Japan August 2008
8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Distance (m)
3500
3000
2500
2000
1500
1000
500
0
Cal
cula
tion
erro
r (m
)
1 10 100 200 300 400 500 10002000300040005000
Newton (4 itr)Newton (5 itr)Newton (6 itr)
(a)
Cal
cula
tion
erro
r (m
)
Distance (m)1 10 100 200 300 400 500 1000 2000 3000 4000 5000
06
05
04
03
02
01
00
Lambert (4 itr)Newton (7 itr)Newton (8 itr)
(b)
Figure 3 The distance calculation error using different methods and different number of iterations
Figure 4 RAVENRZ-3290 sensor and AVR JTAGICE-MKII pro-grammer
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
200
400
600
800
1000
1200
Distance (m)
Cal
cula
tion
erro
r (m
)
Newton (4 itr)
Lambert (4 itr)Newton (8 itr)
Figure 5 The calculation error under different methods anditerations
0
10
20
30
40
50
60
70
80
90
Computational methods
Proc
essin
g tim
e (s
)
Newton (8 itr) 8640025
Lambert (4 itr) 5126025Newton (4 itr) 5972625
Figure 6 The required processing time by different methods
identify their location [22]Most of these techniques were notusing RSS as their distance measurement method due to themultipath and shadowing effect on TL which alters its valuein receiver [9] Based on limitation of RSS most localizationmethods in UASN are using Time of Arrival (ToA) methodwhich needs very precise clock synchronization betweensensorsmdashanother challenging problem even for terrestrialWSN
In order to identify the accuracy of proposed methodwhen the measured TL is not accurate Some experimentshave been done According to [23] TL has the standarddeviation of 5 for up to 2000m underwater with a normaldistribution However [24] reported the value from 10 to 15as the standard deviation of TL based on the distance to theforeshore Tomeasure theworst case scenario in this researchthe alteration of TL is modeled based on [24]
In simulation setup two sensor nodes were consideredin communication range of each other underwater and notnecessarily in the same depth To make the model as simpleas possible the nodes do not share their information of
6 Mathematical Problems in Engineering
50 100 150 200 250 300 350 400 450 500
0
100
200
300
400
500
600
700
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(a) After receiving 5 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
50
100
150
200
250
300
350
400
450
500
Actual distance (m)
(b) After receiving 10 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
140
160
Actual distance (m)
(c) After receiving 50 packets
Figure 7 The distance calculation error with error correction using geometric mean (1)
the distance together Now when a sensor receives a packetbased on the received TL it calculates the sender distance andsaves it in a list By the next packet it receives it measuresthe distance again and saves it to the list again To identifythe estimation distance the sensor uses a simple likelihoodalgorithm (geometric mean) to find the best estimation fromits distance to the receiver The simulation has been runfor 100 times when receiver just receives 5 packets Thesimulation also has been run for receiving 10 50 100 500and 1000 packets The experiments have been repeated forvarious distances between sensors The distance error wherethe sensor calculates the distance based on just one receivedpacket is based on [24] Figures 7 and 8 show the errorin distance measurement using TL and geometric mean asa simple likelihood algorithm when a various number ofpackets has been received in the sensor
The results show that by increasing the number ofreceived packets in the sensor the error will be dramaticallydecreased For instance the average estimation error for 100
experiments between two sensors in 500m distance of eachother and receiving 1000 packets is about 6m However as ithas been shown in the figures there are still some rare resultswith high error rate up to 35m for the same experimentThis indicates that although the proposed geometric meanreduced the amount of error in distance estimation still someothermethods can be added to the algorithm tomake it moreaccurate For instance sensors can share their distance tablestogether in order to reduce the error Another method can beusing the triangulationmethodwhen there aremore than oneneighbors for refining the distance measurement algorithm
8 Conclusions
A new mathematical scheme finds distances among nodesin underwater sensor networks via received signal strengththat is presented by a hybrid computation scheme invertthe transmission loss TL using the Lambert 119882 functionevaluated by the Halley Method We compare its efficiency
Mathematical Problems in Engineering 7
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(a) After receiving 100 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
40
45
50
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(b) After receiving 500 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(c) After receiving 1000 packets
Figure 8 The distance calculation error with error correction using geometric mean (2)
and accuracy with TL inversion through the well-knownNewton-Raphson method and show that the computationmethod influences the accuracy of distance measurementIn simulations the Newton method needs 8 iterations toreach the same accuracy as 4 Halley steps and in the realtest-bed even 8 iterations have substantial error Moreoverin real test-bed results our scheme is 165 faster than the4-iteration Newton method with high error Mathematicalcalculation is thus significant for accurate cost-effectivedistancemeasurement in sensor networks By considering thealteration in value of TL because of multipath and shadowingeffect of underwater the error in distance measurement iscalculated Furthermore it has been shown that althoughthe error in distance measurement is very high using a verysimple likelihood method in receiving several samples of TLcan dramatically reduce the distance estimation error Aslong as the proposed error recovery method is based on twosensors sending data our future work will be on developing
an algorithm for high error recovery and near exact distancemeasurement using RSS for UASN
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Biao L Yu H Haining and Z Chunhua ldquoTarget localiza-tion in underwater acoustic sensor networksrdquo in Proceedingsof the 1st International Congress on Image and Signal Processing(CISP rsquo08) vol 4 pp 68ndash72 Sanya China May 2008
[2] K H Lee C H Yu J W Choi and Y B Seo ldquoToA basedsensor localization in underwater wireless sensor networksrdquoin Proceedings of the SICE Annual Conference pp 1357ndash1361Tokyo Japan August 2008
8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
50 100 150 200 250 300 350 400 450 500
0
100
200
300
400
500
600
700
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(a) After receiving 5 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
50
100
150
200
250
300
350
400
450
500
Actual distance (m)
(b) After receiving 10 packets
Erro
r in
dist
ance
cal
cula
tion
(m)
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
140
160
Actual distance (m)
(c) After receiving 50 packets
Figure 7 The distance calculation error with error correction using geometric mean (1)
the distance together Now when a sensor receives a packetbased on the received TL it calculates the sender distance andsaves it in a list By the next packet it receives it measuresthe distance again and saves it to the list again To identifythe estimation distance the sensor uses a simple likelihoodalgorithm (geometric mean) to find the best estimation fromits distance to the receiver The simulation has been runfor 100 times when receiver just receives 5 packets Thesimulation also has been run for receiving 10 50 100 500and 1000 packets The experiments have been repeated forvarious distances between sensors The distance error wherethe sensor calculates the distance based on just one receivedpacket is based on [24] Figures 7 and 8 show the errorin distance measurement using TL and geometric mean asa simple likelihood algorithm when a various number ofpackets has been received in the sensor
The results show that by increasing the number ofreceived packets in the sensor the error will be dramaticallydecreased For instance the average estimation error for 100
experiments between two sensors in 500m distance of eachother and receiving 1000 packets is about 6m However as ithas been shown in the figures there are still some rare resultswith high error rate up to 35m for the same experimentThis indicates that although the proposed geometric meanreduced the amount of error in distance estimation still someothermethods can be added to the algorithm tomake it moreaccurate For instance sensors can share their distance tablestogether in order to reduce the error Another method can beusing the triangulationmethodwhen there aremore than oneneighbors for refining the distance measurement algorithm
8 Conclusions
A new mathematical scheme finds distances among nodesin underwater sensor networks via received signal strengththat is presented by a hybrid computation scheme invertthe transmission loss TL using the Lambert 119882 functionevaluated by the Halley Method We compare its efficiency
Mathematical Problems in Engineering 7
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(a) After receiving 100 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
40
45
50
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(b) After receiving 500 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(c) After receiving 1000 packets
Figure 8 The distance calculation error with error correction using geometric mean (2)
and accuracy with TL inversion through the well-knownNewton-Raphson method and show that the computationmethod influences the accuracy of distance measurementIn simulations the Newton method needs 8 iterations toreach the same accuracy as 4 Halley steps and in the realtest-bed even 8 iterations have substantial error Moreoverin real test-bed results our scheme is 165 faster than the4-iteration Newton method with high error Mathematicalcalculation is thus significant for accurate cost-effectivedistancemeasurement in sensor networks By considering thealteration in value of TL because of multipath and shadowingeffect of underwater the error in distance measurement iscalculated Furthermore it has been shown that althoughthe error in distance measurement is very high using a verysimple likelihood method in receiving several samples of TLcan dramatically reduce the distance estimation error Aslong as the proposed error recovery method is based on twosensors sending data our future work will be on developing
an algorithm for high error recovery and near exact distancemeasurement using RSS for UASN
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Biao L Yu H Haining and Z Chunhua ldquoTarget localiza-tion in underwater acoustic sensor networksrdquo in Proceedingsof the 1st International Congress on Image and Signal Processing(CISP rsquo08) vol 4 pp 68ndash72 Sanya China May 2008
[2] K H Lee C H Yu J W Choi and Y B Seo ldquoToA basedsensor localization in underwater wireless sensor networksrdquoin Proceedings of the SICE Annual Conference pp 1357ndash1361Tokyo Japan August 2008
8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
50 100 150 200 250 300 350 400 450 500
0
20
40
60
80
100
120
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(a) After receiving 100 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
40
45
50
Actual distance (m)
Erro
r in
dist
ance
cal
cula
tion
(m)
(b) After receiving 500 packets
50 100 150 200 250 300 350 400 450 500
0
5
10
15
20
25
30
35
Erro
r in
dist
ance
cal
cula
tion
(m)
Actual distance (m)
(c) After receiving 1000 packets
Figure 8 The distance calculation error with error correction using geometric mean (2)
and accuracy with TL inversion through the well-knownNewton-Raphson method and show that the computationmethod influences the accuracy of distance measurementIn simulations the Newton method needs 8 iterations toreach the same accuracy as 4 Halley steps and in the realtest-bed even 8 iterations have substantial error Moreoverin real test-bed results our scheme is 165 faster than the4-iteration Newton method with high error Mathematicalcalculation is thus significant for accurate cost-effectivedistancemeasurement in sensor networks By considering thealteration in value of TL because of multipath and shadowingeffect of underwater the error in distance measurement iscalculated Furthermore it has been shown that althoughthe error in distance measurement is very high using a verysimple likelihood method in receiving several samples of TLcan dramatically reduce the distance estimation error Aslong as the proposed error recovery method is based on twosensors sending data our future work will be on developing
an algorithm for high error recovery and near exact distancemeasurement using RSS for UASN
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Biao L Yu H Haining and Z Chunhua ldquoTarget localiza-tion in underwater acoustic sensor networksrdquo in Proceedingsof the 1st International Congress on Image and Signal Processing(CISP rsquo08) vol 4 pp 68ndash72 Sanya China May 2008
[2] K H Lee C H Yu J W Choi and Y B Seo ldquoToA basedsensor localization in underwater wireless sensor networksrdquoin Proceedings of the SICE Annual Conference pp 1357ndash1361Tokyo Japan August 2008
8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
[3] J Heidemann W Ye J Wills A Syed and Y Li ldquoResearchchallenges and applications for underwater sensor networkingrdquoin Proceedings of the IEEE Wireless Communications and Net-working Conference (WCNC rsquo06) pp 228ndash235 Las Vegas NevUSA April 2006
[4] G Mao B Fidan and B D O Anderson ldquoWireless sensornetwork localization techniquesrdquo Computer Networks vol 51no 10 pp 2529ndash2553 2007
[5] C R Berger S Zhou P Willett and L Liu ldquoStratification effectcompensation for improved underwater acoustic rangingrdquoIEEE Transactions on Signal Processing vol 56 no 8 part 1 pp3779ndash3783 2008
[6] A A Syed and J Heidemann ldquoTime synchronization forhigh latency acoustic networksrdquo in Proceedings of the 25thIEEE International Conference on Computer Communications(INFOCOM rsquo06) pp 1ndash12 Barcelona Spain April 2006
[7] N Patwari and P Agrawal Calibration and Measurement ofSignal Strength for Sensor Localization IGI Global 2009
[8] K-C Lee J-S Ou M-C Huang and M-C Fang ldquoA novellocation estimation based on pattern matching algorithm inunderwater environmentsrdquo Applied Acoustics vol 70 no 3 pp479ndash483 2009
[9] H-P Tan R Diamant W K G Seah and M Waldmeyer ldquoAsurvey of techniques and challenges in underwater localizationrdquoOcean Engineering vol 38 no 14-15 pp 1663ndash1676 2011
[10] AVRRZRAVEN Atmel ProductsmdashMCU WirelessmdashRZRAVEN 2010
[11] R J Urick Principles of Underwater Sound Peninsula Publish-ing 3rd edition 1983
[12] P C Etter Underwater Acoustic Modeling and Simulation SponPress 3rd edition 2003
[13] WHThorp ldquoAnalytic description of the low-frequency attenu-ation coefficientrdquo Acoustical Society of America Journal vol 42no 1 article 270 1967
[14] R M Corless G H Gonnet D E G Hare D J Jeffreyand D E Knuth ldquoOn the Lambert 119882 functionrdquo Advances inComputational Mathematics vol 5 no 4 pp 329ndash359 1996
[15] S Janson D E Knuth T Łuczak and B Pittel ldquoThe birth ofthe giant componentrdquo Random Structures and Algorithms vol4 no 3 pp 231ndash358 1993
[16] O Skovgaard J A Bertelsen and I G Jonsson ldquoComputationof wave heights due to refraction and frictionrdquo Journal of theWaterways Harbors and Coastal Engineering Division vol 101no 1 pp 15ndash32 1975
[17] T C Banwell and A Jayakumar ldquoExact analytical solution forcurrent flow through diode with series resistancerdquo ElectronicsLetters vol 36 no 4 pp 291ndash292 2000
[18] E W Packel and D S Yuen ldquoProjectile motion with resistanceand the Lambert119882 functionrdquoTheCollegeMathematics Journalvol 35 no 5 pp 337ndash350 2004
[19] B Hayes ldquoWhy Wrdquo The American Scientist vol 93 no 2 pp104ndash108 2005
[20] F N Fritsch R E Shafer and W P Crowley ldquoSolution of thetranscendental equationwew= xrdquoCommunications of theACMvol 16 no 2 pp 123ndash124 1973
[21] M Hosseini H Chizari C K Soon and R Budiarto ldquoRSS-based distance measurement in underwater acoustic sensornetworks an application of the Lambert W functionrdquo in Pro-ceedings of the 4th International Conference on Signal Processingand Communication Systems (ICSPCS rsquo2010) pp 1ndash4 GoldCoast Australia December 2010
[22] Z Zhou J-H Cui and S Zhou ldquoEfficient localization for large-scale underwater sensor networksrdquoAdHoc Networks vol 8 no3 pp 267ndash279 2010
[23] P Qarabaqi and M Stojanovic ldquoModeling the large scale trans-mission loss in underwater acoustic channelsrdquo in Proceedingsof the 49th Annual Allerton Conference on CommunicationControl and Computing (Allerton rsquo11) pp 445ndash452 MonticelloIll USA September 2011
[24] J Llor andMMalumbres ldquoStatistical modeling of transmissionpath loss in underwater acoustic networksrdquo in Proceedings of the22nd Jornadas de Paralelismo (JP rsquo11) pp 391ndash396 La LagunaSpain 2011
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of